Physics of Intelligence Robert L. Fry [email protected] Johns Hopkins University/Applied Physics Laboratory

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Physics of Intelligence
Robert L. Fry
Johns Hopkins University/Applied Physics Laboratory

Outline Some background and history Introduce concept of a physics of
computation Demonstrate engineering formalism by
reverse-engineering a cortical neuron – remainder of talk
If time, discuss relevance to weapon systems and fire control
2

Research History 1991 APL IRAD (back when APL paid for crazy ideas) 1995 IEEE Trans. paper “Observer-Participant Models of Neural
Processing.” 1995-2000: Several NIPS papers 2002-2006: 3-4 Computational Neuroscience (CNS) papers where
neural model is refined 2005 – 2007: AFOSR Project IONS jointly with Dr. Mung Chiang at
Princeton (Lagrange-duality and Geometric Programming) 2008, 2009: Consulted to Dr. Todd Hylton who managed the DARPA
Physical Intelligence Program. 2008: CNS Information theory workshop, “Computation by neural
and cortical systems.” 2015: “Computation by biological systems,” Modern Biomedicine
Conjoint computational morphological adaptation – formation of new connections
3

Computational Theory Overview
4

Systems are Expressible as Dynamics
5
Physically dissipative systems
“Far from Equilibrium”
Systems
Neurons
CommunicationSystems
Intelligent Systems
Biological Systems and Their
Hierarchical Organization
Internal Combustion
Engines
Internal Combustion
Engines
SystemEnvironment Environment
What the system “sees”
What the system “does”
One should take the “first-person” view in what follows

Questions
Might there be a common computational explanation for system dynamics?
If so, what are its principles?
Two possible axioms for common physical principle are proposed.
6

7
Axioms
(1) To distinguish is the most basic operation possible
(2) Computation must abide by causality
Can one develop a fundamental theory of computation based on quantifying causality and what is it means to distinguish?

Let us first look at what it means to distinguish

Do you see me?

Do you see me?

When we say there is “nothing” what we really mean is that we cannot distinguish
“something” within our local subjective frame.
Something from Nothing
When a system says there is “something,” then is must possess a minimum of two possible internal subjective states with one state corresponding to the presence of the “something” and the other indicating its absence.

A Dynamical View of Boolean Algebra (Cox1)
12
a A
Logical Assertion Logical Question
1. A Question is defined by the assertions that answer it2. An Assertion is defined by the questions it answers
• This recursive definition gives rise to a symmetry breaking whereby two algebras are created
• One is a Boolean Algebra of Assertions
• The other is a Boolean Algebra of Questions
• Both are PHYSICAL and capture the dynamic processing of information with the subjective frame of a system
e.g., Action potentials e.g., Dendritic synapses
1 Richard T. Cox, JHU Physics Department, 1944-1987

This Might be a Very Old Idea
13
All is One
Question
Assertion

Detectors and Elementary Questions
P {d, ¬d}
P = “Is a photon present or absent?”
P “Is a photon present or absent?”
IncidentPhoton
Superimposed Photon Present and Absent
Detectors
Detectors are Elementary Questions
“PhotonPresent”
“PhotonAbsent ”
P
d
¬d
D
¬D
ReflectionOperator
Inquiring Physicist
~Complementation
Operator
D ¬D
¬DD
• Elementary questions can only be answered “true” or “nothing”• Coincidence detectors are D1D2 and so D1D2 = d1d2
Logical “Quartet”

What Cox Proposed
~~a = a
a a = a a a = a
a b = b a a b = b a
~(a b) = ~a ~b ~(a b) = ~a ~b
a b c = a (b c) = (a b) c
a b c = a (b c) = (a b) c
(a b) c = (a c) (b c)
(a b) c = (a c) (b c)
(a b) b = b (a b) b = b
(a ~a) b = b (a ~a) b = b
a ~a b = a ~a a ~a b = a ~a
Boolean Algebra~~A = A
A A = A A A = A
A B = B A A B = B A
~(A B) = ~A ~B ~(A B) = ~A ~B
A B C = A (B C) = (A B) C
A B C = A (B C) = (A B) C
(A B) C = (A C) (B C)
(A B) C = (A C) (B C)
(A B) B = B (A B) B = B
(A ~A) B = B (A ~A) B = B
A ~A B = A ~A A ~A B = A ~A
Algebra of Questions
“Reflection Operator”

What Cox Proposed
16
“Strict” logical implication provides is unique relational operation on assertions
“Strict” logical implication provides is unique relational operation on questions
a ba b = aa b = b
B AA B= A
A B = B
Soccer signup: “Is child a girl or boy?”s “It is my son!”b “He is a boy?”
s b
Card-Guessing: “What color is the card?S “What is the suit of the card?”
C “What is the color of the card?”S C

Degrees of Implication
17
(a b) = p(b|a) (B A) = b(B|A)
of b on the premise a.
“Generalized” Information
Theorybp
“Bearing” B on a issue A (Entropy).
Reflections
Knowledge Uncertainty

Generalized Information Theory
18
Bearing Information Theory Correspondence
b(X|X) H(X) b(XY|A) H(X,Y) “” “,”b(XY|A) I(X;Y) “” “;”b(X~Y|A) H(Y|X) “|” “~”

19
Back to the Axioms
(1) To distinguish is the most basic computational operation possible
(2) Computation must abide by causality

20
Causality and Claude Shannon
“You can know the past, but not control it. You can control the future, but have no knowledge of it.”
[1] “Source Coding with a Fidelity Criterion,” Proc. IRE, 1959.
• Cryptic comment he made 50 years ago [1]• Promised to expand on it later but never did• Has puzzled information theorists since

Two Kinds of Computation Are Possible
I. “Machines” that reconstruct the past
II. “Machines” that control the future
In both cases, causality induces the computational requirements of memory,
memory storage, and memory reset.
Present When & where computation is done
No Such Thing as Time – Just changes in system states

Computational Cycle Phases
22
Reset Memory
Acquire Information
Store in Memory
Make a Decision to
Control Future
Information Stored in the
Past
Increased Entropy Over Time
Attempt to Reconstruct Stored
Information
Decreased Entropy(at the present)
Think “Archeological Dig” Think “Intelligence Systems”
Type I Type II

Energy, Information, and Entropy
23
Work to provide energy W = Area of Rectangle
Require energy E to work = Area of Rectangle
23
Type IIType I
Entropy EntropyTe
mp
erat
ure
Tem
per
atu
re
QH
QL
W = QH – QL
QH
QL E = QH – QL
Information
Entropy
Make as big as possible!
Make as little as possible!

24
Carnot Cycles
1. Engines2. Communication systems3. Dissipative Physical
systems4. Archeological Digs5. Consumption of fossil fuel
1. Intelligent systems2. Living systems?3. Technologically
“Smart” stuff4. Refrigerators5. Air Conditioning
Type I Type II

Type I System: Archeology
Archeology (at the Present)
Ancient civilization “state” at demise
PhysicalStorage
Passage of Time(Loss of information)
Archeologist perform a “dig”
Analysis of Artifacts, etc
Reconstruction of the Past at the Present

Type I System: Undersea Fiber-Optic Communication System
Undersea Fiber-OpticCommunication System
Transmit Pulse
Storage in Fiber
Attenuation and Dispersion
Detection of Pulse
Recovery of InformationRe-Transmit
(Requires energy)
Channel
Detect and Amp
Detect and Amp
Channel Channel

Energy and Computational Efficiency
1. Intelligent systems2. Biological systems3. Technologically
“Smart” stuff4. Refrigerators5. Air Conditioning
Type II• The area of the Type II Carnot cycle is
the energy that the system requires to operate
• We will see that this is important
Energy efficiency

Engineering a Cortical Neuron
28

Neuron Input-Output Codebooks
YX1
X2
Xn
.
.
.
Single-Neuron System
?
Input Codebook Size = 2n !!!
0 0 1 … 0 1 1 0 1 0 0 1 1 0 … 0 1 1 0 1 1 1 1 0 0 … 0 1 1 1 0 1 1 0 0 1 … 1 0 1 0 0 1 0
1 0 0 ... 1 0 1 1 1 0 0
01
Output Codebook Size = 2
What Look-Up Table?
n~10,000
??
2n = 210000 whew !
“Subjective” Information “Subjective” Decision

Cortical Information Architecture
30
“What do I see?” “What do I do?”
X=X1X2 …Xn
b(XY|A) = b[ (X1 Y) (X2 Y) . . . (Xn Y) | A ]
A = “How can I maximize my information throughput?”
Y
XYActionable Information:
Information measure to be optimized:

Subjective Cortical Inquiry
Suppose a cortical neuron can ask
XY =(X1 Y) (X2 Y) . . . (Xn Y)
Further suppose that it can observe its own answers Y. Together, this mean it asks(XY) Y .
(XY) Y = (x1y) (x2y) … (xny) y
(Mult. and Hebbian)Superposition
(Add)“Reflect”

Maximum Entropy Formalism
Suppose that the cortical neuron can approximate the following expectations.
Maximum
1 2, , , ,nx y x y x y y
0exp exp(1 )n y BB
TZ y y
x
λ x 0exp exp(1 )
n y BB
TZ y y
x
λ x
Plus the Entropy Principle

This Distribution has Many Fascinating Properties
Synaptic Efficacies
Decision Threshold

04/15/202334
p( 1| ) [ | 1] p( 1)ln ln ln
p( 0 | ) [ | 0] p( 0)
y p y y
y p y y
x x
x x
FiringThreshold
Induced SomaticPotential
Total SomaticPotential
Neural Decisioning Using Log-Bayes’ Theorem
- Statistical Evidence (Log Odds)- Sufficient Statistic- Bayes’ Theorem- Optimum Nonlinear Estimator
For y Given x- Induced Somatic Potential
Some Properties of (x)
Optimal In Almost Every Regard
T( )x x
Pro
ba
bili
ty
-5 0 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Evidencek(t)
Somatic Decisioning
Pro
bab
ility
of
Fir
ing
Evidence (x)

Neural Adaptation
35

The Concept of Double-Matching
36
• Simultaneously optimizes information processing efficiency and the energy efficiency of a communication system or an “intelligent” system.
• M. Gastpar, et al., “To code, or not to code: Lossy source-channel communications revisited, IEEE Trans. on Information Theory, 1147-1158, May, 2003.
• R. Fry, “Dual Matching as a Problem Solved by Neurons,” Computational Neuroscience Meeting, Neurocomputing, 69, pp. 1086–1090, 2005.

Solving Min-Max Optimization Problem Gives 3 Adaptation Equations Over 2n+1 Neural System Parameters
37
| 1 | 1 | 1TTR y y y y xx x x
(1) vector is largest eigenvector
(2) Decision threshold is expected Hebbian induced potential
(3) Dendritic delay equalization rules
Define:

04/15/202338
Single-Neuron Adaptation
Hebbian Gating for (1) – (3)
.
.
.
1
n
Y
X1
X2
Xn
.
.
.
n
X
Y
Three Hebbian Learning Equilibria Result that Can be Realized Using Simple Biologically Plausible Algorithms
1) Threshold Adaptation () The Optimal Decision Threshold Is
Average Somatic Potential
2) Gain Adaptation ()The Optimal Gain Vector Is the Largest
Eigenvector of the Input Covariance Matrix R
3) Delay Equalization ()Elements of the Optimal Time Delay Vector Must Satisfy “Momentum” Equalization:
di / dt = i y(t) dxi(ti)/dt = 0
2( ) ( ) ( )[ ( ) ( ) ( )]t t t t tx x x
( ) (1 ) ( )t t t T x
| 1 | 1
TE y y x x x xR( )

04/15/2023 39
xi
xi+1
xi+2
xi+3
xi+4
t – j
Gai
n Sp
ace
Delay Space
All Times and Spatial Inputs are Referenced to Somatic Location and Decision Time t
Som
atic
Inte
grat
ion
and
Dec
isio
ning
Stable
Neu
ral S
yste
m
Pre-Synaptic Signal Space
1
1
0
1
0
Binary Space-Time Codes are Defined by “Local” Single-Neuron System Coordinate Frame
Action Potentials Are Binary Signals That Define Space-time Codes. These Codes Are “Subjectively” Referenced To and Defined By Each Neuron Through Its Learned Spatial Dendritic Gains and Temporal Delays With Each Code Referenced to Somatic Decisioning Event Times
y(t)
orAdvanced
Delayed
t – j+1 t – j+2 t – j+3 t – j+4 t – j+5
Outputs

10 100 1000 10000
0.10
1.00
10.0
0.10
0.01
Inve
rse
Te
mp
era
ture
=
1/T
Number of Neural Inputs n
1.00
0.001
Closed-Form Partition Function Z
2 / 4
1
2 2 cosh2
nn n i
i
Z e
• System has fixed Z=2n and no outputs possible
• Higher n means higher energy efficiencySystem Entropy
Approaches n Bits
Z1/2n
Scale
“Carnot Cyclic Operation”Z varies between 2n and 2n+1

41
Summary: Neural Carnot Cycle
A single neuron operates as a Carnot refrigerator with Carnot efficiency =85-90%.
H(Y)=b(Y|A)Z=2n
I(X;Y)=b(XY|A)Z=2n+1
Z: 2n+1 2n Z: 2n2n+1
4. Reset Memory during the refractory
3. Decision Made by soma
0.9 Bit/Decision
T=1/1. Acquire Information through synapses
2. Information Stored in soma
T=1
T=0.2Tem
per
atu
re
Entropy
Re-establish Na+, K++ ion concentrations across membrane

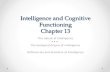
Simulation Output
Synaptic Gains
1 5 10 15 20-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Gains on non-informative inputs are driven to zero.
Training vector bit
Vectors Inducing Firing
1 5 10 15 200
1
The neuron learns to fire on almost exactly half of the training vectors.
Training vector index

43
Do Not Fire!
Geometric View of Single Cortical Model
2N Codes
Hyperplane is Defined by and
Adaptation Serves to Define a Look-Up Table Defined by Two Equally Probable Partitions of the Input Codebook X Thereby
Ensuring that H(Y) = 1 Bit/Decision
Decide to Fire!
Model says that all neurons do is to learn how to distinguish
Maxim
um eigenvector direction

44
Essence of the Fire Control Loop
Target localization space
Weapon kinematic space
Y
X
Fire Control Loop snapshot at an instant in time
So is the “state” of the weapon system state depicted above good or bad?
Y = Places where the missile can go in the futureX = Places where the target can be at the same future time
The weapon system must operate its fire control loop such that the weapon can always kinematically contains the places where the target can be.

Additional
45

46

04/15/2023 47
0x 0x
0x
ti t
Post-synaptic Potentials
0x 0x 0x
i > 0
i < 0
Somatic Decision Event
Time
i
Positive i
Negative i
Temporal Adaptation
(1) Equilibrium Condition for Temporal Adaptation:
di /dt = i y(t) dxi(ti)/dt
(2) Equilibrium Condition Represents “Zero Average
Momentum Transfer”Mass Weight i
Velocity dxi / dtHebbian Gate: y(t)=1
(3) Positive or Negative Gains Processed the Same
Way

04/15/2023 48
Temporal Adaptation
( a )
( b )
( c )
A c t io n p o te n t ia lg e n e r a te d b y q
A c q u is i t io n w in d o w
L a te in p u t( d e c r e a s e d e la y )
E a r ly in p u t( in c r e a s e d e la y )
N o m in a l a r r iv a l t im e( n o d e la y c h a n g e )
L e a r n e d d e n d r i t icc h a n n e l d e la y
di / dt = i y(t) dxi(ti)/dt
Hebbian temporal adaptation equation:
Equalization of inputs at the soma also guarantee maximal “delivered” power and in some sense provides an impedance matching function.

04/15/2023 49
Condition:
Output: y(t)
Efficacy: i
Derivative: x(t
id )/t
Explanation
1 No adaptation due to lack of output 2 No adaptation due to lack of output 3 No adaptation due to lack of output 4 No adaptation due to lack of output 5 No or little adaptation due to minimal 6 or nonexistent synaptic efficacy 7 No input or equilibrated adaptation 8 +/ Temporal adaptation occurs
TTaabbllee IIII:: SSuummmmaarryy ooff tthhee eeiigghhtt ccoonnddiittiioonnss uunnddeerr wwhhiicchh tthhee iinnppuutt mmoommeennttuumm aass ddeeffiinneedd bbyy ppii == ii ddxxii((tt
ii))//ddtt yy((tt)) iiss zzeerroo.. TThhee ssyymmbbooll ddeennootteess zzeerroo;; ddeennootteess nnoonn--zzeerroo.. TThhee nnoottaattiioonn ++// ddeennootteess tthhee ppoossiittiivvee oorr nneeggaattiivvee ddeerriivvaattiivvee,, rreessppeeccttiivveellyy,, ooff tthhee iinnppuutt aaccttiioonn ppootteennttiiaall.. TTeemmppoorraall aaddaappttaattiioonn oonnllyy ooccccuurrss iinn ccaassee 88..
Temporal Adaptation
Delay Adaptation Seeks the Spatiotemporal to Ensure a the Spatiotemporal Confluence of Information Within the Soma to Allow Decisions to be Made on the Instantaneously Available Evidence.
di / dt = i y(t) dxi(ti)/dt

Example

04/15/2023 51
Modeling and SimulationBit
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
1 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 2 0 1 0 0 0 1 0 0 0 0 0 1 1 1 0 1 1 1 0 1 3 1 1 0 1 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 1 4 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 5 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 6 1 1 1 1 1 0 1 0 0 0 1 0 0 0 0 0 1 0 0 1 7 0 1 0 1 0 1 1 0 1 0 0 0 0 1 0 1 1 0 0 1 8 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 9 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 10 1 0 0 1 0 0 0 1 1 0 1 1 1 1 0 1 1 0 0 1 11 1 1 0 0 0 1 1 0 0 0 0 0 0 1 0 0 1 0 1 1 12 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 13 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 14 1 0 0 0 1 1 1 0 1 0 1 1 0 0 1 1 1 1 0 1 15 0 0 0 0 1 1 1 1 0 0 1 0 1 0 1 0 0 1 1 1 16 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 17 0 1 1 0 1 1 1 0 0 0 1 1 1 1 0 1 0 0 1 1 18 1 0 0 0 0 0 1 0 0 0 1 0 1 1 1 1 0 1 1 1 19 1 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 1 1 1 1
Cod
e In
dex
20 1 1 0 1 0 1 0 0 1 0 1 0 0 0 0 0 0 0 0 1
Table I: Training set of codes xi , i=1,2,...,20 with each code containing 20 bits.

04/15/2023 52
Modeling and Simulation
Code Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
1 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
2 7 0 11 8 7 12 6 8 7 8 7 8 7 9 13 8 7 9 9 10
3 10 11 0 9 10 7 9 9 10 9 8 9 10 12 10 9 14 10 6 5
4 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
5 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
6 7 12 7 6 7 0 8 6 7 10 7 6 7 9 13 6 9 11 9 6
7 3 6 9 4 3 8 0 4 3 8 5 4 3 9 17 4 9 11 11 6
8 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
9 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
10 7 8 9 8 7 10 8 8 7 0 11 8 7 9 13 8 11 9 7 8
11 6 7 8 7 6 7 5 7 6 11 0 7 6 10 14 7 8 8 8 7
12 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
13 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
14 10 9 12 9 10 9 9 9 10 9 10 9 10 0 10 9 10 8 10 9
15 20 13 10 19 20 13 17 19 20 13 14 19 20 10 0 19 12 10 8 13
16 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
17 8 7 14 9 8 9 9 9 8 11 8 9 8 10 12 9 0 8 14 11
18 10 9 10 11 10 11 11 11 10 9 8 11 10 8 10 11 8 0 10 11
19 12 9 6 11 12 9 11 11 12 7 8 11 12 10 8 11 14 10 0 9
Cod
e N
um
ber
20 7 10 5 6 7 6 6 6 7 8 7 6 7 9 13 6 11 11 9 0
Figure 5.4: Hamming distances between the 20 codes listed in Table 5.1.

04/15/2023 53
i = 1
i = 30
i = 120
Decisions y p(y=1|xi) 0.5
Code Index
Code Index0 2 4 6 8 10 12 14 16 18 20
0
1
Code Index0 2 4 6 8 10 12 14 16 18 20
0
1
Code Index0 2 4 6 8 10 12 14 16 18 20
0
1
Code Index0 2 4 6 8 10 12 14 16 18 20
-8
-6
-4
-2
0
2
4 104
104
0 2 4 6 8 10 12 14 16 18 20-8
-6
-4
-2
0
2
4
Code Index0 2 4 6 8 10 12 14 16 18 20
-8
-6
-4
-2
0
2
4 104
Dendritic Gains0 2 4 6 8 10 12 14 16 18 20
-4
-3
-2
-1
0
1
2
34
104
Dendritic Gains
104
0 2 4 6 8 10 12 14 16 18 20-4
-3
-2
-1
0
1
2
3
4
Dendritic Gains
104
0 2 4 6 8 10 12 14 16 18 20-4
-3
-2
-1
0
1
2
3
4
Sample Learning DynamicsTr
ain
ing
Ite
rati
on
Nu
mb
er

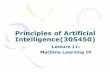
04/15/2023 54
103
102
101
100
101
0
0.5
1
Inverse Temperature β
Ou
tpu
t E
ntr
op
y H
(Y)
Onset of Criticality
• System Entropy Transitions from n+1 to n
• Output Freezes . . .
Adaptation and Criticality

Monte-Carlo Simulation Results
Decision Threshold Undergoes Only Modest Changes
0.00E+00
2.00E-01
4.00E-01
6.00E-01
8.00E-01
1.00E+00
0.00
01
0.01 1
10
1000
2
0.1
0.00
1
100
4
6
8
10
12
Gamma-squared
Dimen
sion n
E{H
}
Dimen
sion
N
E{H
}
Output Entropy
Output Entropy Maximized at 1 Bit per Decision
0.00
01
0.01 1 10
1000
2
0.1
0.00
1
100
4
6
8
10
12
Gamma-squared
Dim
ensi
onn
Dim
ensi
on N
E{
}Decision
Threshold
Stable Over Wide Operational Ranges of Parameters, Gains, and Number of Inputs N
1 Bit
Small Variations

56
Intelligent Systems
• Intelligent system require energy to work
• “ Intelligence” whatever it is allows us to design more energy efficient systems
“Smart” grid “Smart” buildings
“Smart” phones

57
Biological Systems
. . . How can we build stuff like this?
• Biological systems require energy to work
• They are the most energy efficient systems known
Efficiencies of 90% or more!

The Maximum Entropy Principle
0
p( , | ) ln p( , | )
p( , | )[( , ) , ]
p( , | )[ ]
p( , | ) 1
y Y X
T
y Y X
y Y X
y Y X
J y a y a
y a y y
y a y y
y a
x
x
x
x
x x
x x x
x
x
ME Objective Function
1( , ) exp Tp y y y
Z x λ x
Single-Neuron Input-Output Distribution
exp T
X y Y
Z y y
x
λ x
Partition Function*
*Determines all neural dynamical properties

Optimization Details (1994)Minimize I(X;Y,,) over subject to a normalization constraint on the length of over or | |2 w/ fixed.
( ) 2( ; , , ) | |L I X Y λ λ( )L
0λ
Maximize I(X;Y,,) over with fixed( ) ( ; , , )L I X Y λ
( )
0L
Can also make I(X;Y,,) = I(X;Y,,,) a function of the individual dendritic transmission delays to find the temporal adaptation rule.

Modeling and Simulation Training SetTraining Vector Bit
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
1 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 2 0 1 0 0 0 1 0 0 0 0 0 1 1 1 0 1 1 1 0 1 3 1 1 0 1 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 1 4 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 5 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 6 1 1 1 1 1 0 1 0 0 0 1 0 0 0 0 0 1 0 0 1 7 0 1 0 1 0 1 1 0 1 0 0 0 0 1 0 1 1 0 0 1 8 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 9 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 10 1 0 0 1 0 0 0 1 1 0 1 1 1 1 0 1 1 0 0 1 11 1 1 0 0 0 1 1 0 0 0 0 0 0 1 0 0 1 0 1 1 12 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 13 1 1 1 1 0 1 1 0 1 0 0 0 1 1 0 1 1 0 0 1 14 1 0 0 0 1 1 1 0 1 0 1 1 0 0 1 1 1 1 0 1 15 0 0 0 0 1 1 1 1 0 0 1 0 1 0 1 0 0 1 1 1 16 1 1 1 1 0 1 1 0 1 0 0 0 1 0 0 1 1 0 0 1 17 0 1 1 0 1 1 1 0 0 0 1 1 1 1 0 1 0 0 1 1 18 1 0 0 0 0 0 1 0 0 0 1 0 1 1 1 1 0 1 1 1 19 1 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 1 1 1 1
Vec
tor
Ind
ex
20 1 1 0 1 0 1 0 0 1 0 1 0 0 0 0 0 0 0 0 1

Hamming Distance Between Vectors Conveys Structure
Code Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
1 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
2 7 0 11 8 7 12 6 8 7 8 7 8 7 9 13 8 7 9 9 10
3 10 11 0 9 10 7 9 9 10 9 8 9 10 12 10 9 14 10 6 5
4 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
5 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
6 7 12 7 6 7 0 8 6 7 10 7 6 7 9 13 6 9 11 9 6
7 3 6 9 4 3 8 0 4 3 8 5 4 3 9 17 4 9 11 11 6
8 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
9 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
10 7 8 9 8 7 10 8 8 7 0 11 8 7 9 13 8 11 9 7 8
11 6 7 8 7 6 7 5 7 6 11 0 7 6 10 14 7 8 8 8 7
12 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
13 0 7 10 1 0 7 3 1 0 7 6 1 0 10 20 1 8 10 12 7
14 10 9 12 9 10 9 9 9 10 9 10 9 10 0 10 9 10 8 10 9
15 20 13 10 19 20 13 17 19 20 13 14 19 20 10 0 19 12 10 8 13
16 1 8 9 0 1 6 4 0 1 8 7 0 1 9 19 0 9 11 11 6
17 8 7 14 9 8 9 9 9 8 11 8 9 8 10 12 9 0 8 14 11
18 10 9 10 11 10 11 11 11 10 9 8 11 10 8 10 11 8 0 10 11
19 12 9 6 11 12 9 11 11 12 7 8 11 12 10 8 11 14 10 0 9
Cod
e N
umbe
r
20 7 10 5 6 7 6 6 6 7 8 7 6 7 9 13 6 11 11 9 0
Figure 5.4: Hamming distances between the 20 codes listed in Table 5.1.

Simulation Output
Synaptic Gains
1 5 10 15 20-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Gains on non-informative inputs are driven to zero.
Training vector bit
Vectors Inducing Firing
1 5 10 15 200
1
The neuron learns to fire on almost exactly half of the training vectors.
Training vector index
Related Documents