-
8/10/2019 PF on Riemannian Manifolds
1/23
Chapter 17
Particle Filtering on Riemannian Manifolds.
Application to Covariance Matrices Tracking
Hichem Snoussi
17.1 Introduction
Given a dynamical system characterized by a state-space model, the objective of
the online Bayesian filtering is the estimation of the posterior marginal probability
of the hidden state given all the observations collected until the current time. The
nonlinear and/or the non Gaussian aspect of the prior transition distributions and
the observation model leads to intractable integrals when evaluating the marginals.
Therefore, one has to resort to approximate Monte Carlo schemes. Particle filtering
[1] is such an approximate Monte Carlo method estimating, recursively in time, the
marginal posterior distribution of the continuous hidden state of the system. The
particle filter provides a point mass approximation of these distributions by drawing
particles according to a proposal distribution and then weighting the particles in order
to fit the target distribution.
The particle filter method is usually applied to track a hidden state belonging to an
Euclidean space. The most popular scheme is to sample the particles according to a
random walk around the previous particles. However, in some tracking applications,
the state may be constrained to belong to a Riemannian manifold. Recently, some
works have been dedicated to design algorithms adapted to the Riemannian mani-fold constraints, based on differential geometry tools: Gradient-descent algorithm on
Grassmann manifold for object recognition [2], statistical analysis of diffusion tensor
MRI[3], geodesic-based deconvolution algorithms [4], tracking principal subspaces
[5], algorithms in Stiefel and Grassman manifolds[6,7], statistical analysis on man-
ifolds [810], optimization on matrix manifolds[11, 12], and a general scheme for
tracking fast-varying states on Riemannian manifolds in [13]. This chapter is devoted
to the application of this differential-geometric framework to design efficient target
H. Snoussi(B)Charles Delaunay Institute,
UMR STMR 6279 CNRS, University of Technology of Troyes,
12, rue Marie Curie, 10010, Troyes, France
e-mail: [email protected]
F. Nielsen and R. Bhatia (eds.),Matrix Information Geometry, 427
DOI: 10.1007/978-3-642-30232-9_17, Springer-Verlag Berlin Heidelberg 2013
-
8/10/2019 PF on Riemannian Manifolds
2/23
428 H. Snoussi
tracking algorithms. We particularly consider the case where the observation noise
covariance is unknown and time-varying. The Bayesian filtering objective is thus to
jointly estimate the hidden target state and the time-varying noise covariance. As
the noise covariance is a positive definite matrix, the Euclidean space is not suitable
when tracking this covariance. Instead, one should exploit the differential geometricproperties of the space of positive definite matrices, by constraining the estimated
matrix to move along the geodesics of this Riemannian manifold. The proposed
sequential Bayesian updating consists thus in drawing state samples while moving
on the manifold geodesics.
The chapter is organized as follows: Sect. 17.2 is a brief introduction to the particle
filtering method on the Euclidean spaces. In Sect. 17.3,we describe some concepts
of differential geometry. In Sect. 17.4,we present a general scheme for the particle
filtering method on a Riemannian manifold. Section 17.5is dedicated to the design
of a particle filter jointly tracking a target state belonging to an Euclidean space anda time-varying noise covariance modeling the evolution over time of the sensing
system imperfections.
17.2 Bayesian Filtering on Euclidean Spaces
In this section, we briefly recall the particle filter method for filtering in nonlinear
dynamical systems characterized in Euclidean spaces. It is an approximate MonteCarlo method estimating, recursively in time, the marginal posterior distribution of
the continuous hidden state of the system, given the observations. The particle filter
provides a point mass approximation of these distributions. For more details and a
comprehensive review of the particle filter see[1,14,15].
The observed system evolves in time according to the following nonlinear dynam-
ics: xt px(xt | xt1, ut)
yt py (yt | xt, ut), (17.1)
where yt Rny denotes the observation at time t, xt Rnx denotes the unknown
continuous state, and ut Udenotes a known control signal. The probability dis-
tribution px(xt | xt1, ut)models the stochastic transition dynamics of the hidden
state. Given the continuous state, the observations yt follow a stochastic model
py (yt | xt, ut), where the stochastic aspect reflects the observation noise.
The Bayesian filtering is based on the estimation of the posterior marginal prob-
ability p(xt | y1:t). The nonlinear and the non Gaussian aspect of the transition
distributions leads to intractable integrals when evaluating the marginals. Therefore,
one has to resort to Monte Carlo approximation where the joint posterior distribution
p(x0:t | y1:t) is approximated by the point-mass distribution of a set of weightedsamples (called particles){x
(i )0:t, w
(i )t }
Ni =1:
-
8/10/2019 PF on Riemannian Manifolds
3/23
17 Particle Filtering on Riemannian Manifolds 429
pN(x0:t | y1:t)=
Ni =1
w(i )t x(i )0:t
(dx 0:t),
wherex(i )0:t(dx 0:t)denotes the Dirac function, and dx 0:tis the Lebesgue measure.Based on the same set of particles, the marginal posterior probability (of interest)
p(xt | y1:t)can also be approximated as follows:
pN(xt | y1:t)=
Ni =1
w(i )t x(i )t
(dxt),
Backward estimation of the marginal state probability is also possible given the
particles{x(i )
0:t+t , w
(i )
t+t }N
i =1
:
p(xt | y1:t+t )
Ni =1
w(i )t+tx(i )t
(dx t),
In the Bayesian importance sampling (IS) method, the particles {x(i )0:t}
Ni =1 are
sampled according to a proposal distribution(x0:t | y1:t)and {w(i )t }are the corre-
sponding normalized importance weights:
w(i )t
p(y1:t | x(i )0:t)p(x
(i )0:t)
(x(i )0:t | y1:t)
.
17.2.1 Sequential Monte Carlo
Sequential Monte Carlo (SMC) consists of propagating the trajectories {x(i )0:t}
Ni =1 in
time without modifying the past simulated particles. This is possible for the class ofproposal distributions having the following form:
(x0:t | y1:t)= (x0:t1 | y1:t1)(xt | x0:t1, y1:t).
The normalized importance weights are then recursively computed in time as:
w(i )t w
(i )t1
p(yt | x(i )t )p(x
(i )t | x
(i )0:t1)
(x(i )t | x
(i )0:t1, y1:t)
. (17.2)
For sake of clarity, one can adopt the transition prior as the proposal distribution:
(x(i )t | x
(i )0:t1, y1:t)= px(xt | xt1, ut)
-
8/10/2019 PF on Riemannian Manifolds
4/23
430 H. Snoussi
in which case the weights are updated according to the likelihood function:
w(i )t w
(i )t1p(yt | x
(i )t ).
The particle filter algorithm (depicted in pseudo-code Algorithm 17.1) consists of2 steps: the sequential importance sampling step and the selection step. The selection
(resampling) step replaces the weighted particles by unweighted particles in order to
avoid the collapse of the Monte Carlo approximation caused by the variance increase
of the weights. It consists of selecting the trajectories {x(i )0:t}with probabilitiesw
(i )t .
The trajectories with weak weights are eliminated and the trajectories with strong
weights are multiplied. After the selection step, all the weights are equal to 1 /N.
Algorithm 17.1Particle filter algorithm on an Euclidean space1: function PF(PP)
2: Initializationx(i )0 p0(x)
3: for t=1 toT do(Sequential importance sampling)
4: fori =1, ...,N do(sample from the transition prior)
5: x(i )t px(xt | x
(i )t1, ut)
6: set( x(i )0:t)= ( x
(i )t ,x
(i )0:t1)
7: end for
8: Update the importance weights
9: for i =1, ...,N do(evaluate and normalize the weights)
10: w
(i )
t p(yt | x(i)
t )11: end for
12: Resampling:
13: Select with replacement from { x(i)0:t}
Ni =1 with probability {w
(i)t } to obtain N particles
{x(i )0:t}
Ni =1
14: end for
15: end function
17.3 Differential Geometry Tools
In order to have a self-content framework, we devote this section to the introduction of
some differentiable geometry tools related to the concept of Riemannian manifolds.
These tools are necessary to the design of the particle filter on Riemannian manifolds.
For further details on Riemannian geometry, refer to[16].
First, we need to define a topological manifold as follows:
Definition 17.1 A manifoldM of dimension n, or n-manifold, is a topological space
with the following properties:(i) M is Haussdorff,
(ii) M is locally Euclidean of dimensionn , and
(iii) M has a countable basis of open sets.
-
8/10/2019 PF on Riemannian Manifolds
5/23
17 Particle Filtering on Riemannian Manifolds 431
Fig. 17.1 Topological mani-
fold
U
2
M
1
Intuitively, a topological manifold is a set of points which can be considered locally
as a flat Euclidean space. In other words, each point p M has a neighborhood
Uhomeomorphic to an n-ball in Rn . Let be such an homeomorphism. The pair
(U,)is called a coordinate neighborhood: to p Uwe assign the n coordinates
1(p), 2(p), ..., n(p) of its image (p) in Rn (see Fig. 17.1). If p lies also in a
second neighborhood V, let(p)= [1(p), 2(p), ...,n (p)]be its correspondent
coordinate system. The transformation 1 on Rn given by:
1 : [1, ...,n] [1, ...,n ],
defines a local coordinate transformation on Rn from = [i ]to = [i ].In differential geometry, one is interested in intrinsic geometric properties which
are invariant with respect to the choice of the coordinate system. This can be
achieved by imposing smooth transformations between local coordinate systems
(see Fig. 17.2). The following definition of differentiable manifold formalizes this
concept in a global setting:
Definition 17.2 A differentiable (or smooth) manifoldM is a topological manifold
with a family U = {U,}of coordinate neighborhoods such that:
(1) theU cover M,(2) for any ,, if the neighborhoods intersection U U is non empty, then
1 and
1 are diffeomorphisms of the open sets(U U)and
(U U)ofRn ,
(3) any coordinate neighborhood (V,) meeting the property (2) with every
U, Uis itself in U
Tangent spaces. On a differentiable manifold, an important notion (in the sequel)
is the tangent space. The tangent space Tp(M) at a point p of the manifold M
is the vector space of the tangent vectors to the curves passing by the point p. It
is intuitively the vector space obtained by a local linearization around the point p.
More formally, let f : M R be a differentiable function on the manifold M
and : I M a curve on M, thedirectional derivativeof f along the curve
is written:
-
8/10/2019 PF on Riemannian Manifolds
6/23
432 H. Snoussi
1
1
U
2
2
M
U
1
Fig. 17.2 Differentiable manifold
Fig. 17.3 Tangent space on
the manifold
e1
M
2
1p
e2
d
dtf(t)=
fi
di
dt=
didt
i
f
where the derivative operator ei = i
can be considered as a vector belonging to
the tangent space at the point p. The tangent space is then the vector space spanned
by the differential operators i p:Tp(M)=
ci
i
p
| [c1, ..., cn ] Rn
,
where the differential operator ( i
)pcan be seen geometrically as the tangent vector
to the i th coordinate curve (fixing all j coordinates j =i and varying only the value
ofi ), see Fig. 17.3.
Vector fields and tensor fields. A vector field Xis an application M p Tp,
which assigns a tangent vector to each point of the manifold:
X : p S Xp Tp
-
8/10/2019 PF on Riemannian Manifolds
7/23
17 Particle Filtering on Riemannian Manifolds 433
Fig. 17.4 Vector field on the
manifold
M
p
Xp = Xpii
The vector fieldXcan bedefined by its n component functions {Xi }n
i =1 (see Fig. 17.4).X isC (smooth) if and only if all its scalar components (Xi )are C
.
A tensor field A of type [q, r] is an application which maps a point p Mto
some multilinear mapping Ap fromTr
p toTq
p:
A : p ApAp : Tp Tp
r direct products
Tp Tp
q direct products
The types [0, r] and [1, r] are respectively called tensor fields of covariant degreerand tensor fields of contravariant degree 1 and covariant degree r. For example, a
scalar product is a tensor field of type[0, 2]:
Tp Tp R
(Xp, Yp)< Xp, Yp > .
Riemannian metric. For each point p in M, assume that an inner product p is defined on the tangent space Tp(M). Thus, a mapping from the points of
the differentiable manifold to their inner product (bilinear form) is defined. If thismapping is smooth, then the pair (M, < , >p)is calledRiemannian manifold(see
Fig. 17.5). The Riemannian metric is thus a tensor field g which is, according to a
coordinate system{}, defined by the positive definite matrices G p:
Gi j (p)=p
On a manifoldM, an infinite number of Riemannian metrics may be defined. The
metric does not thus represent an intrinsic geometric property of the manifold.
Consider now a curve: [a, b] (S, g), its length||||is defined as:
-
8/10/2019 PF on Riemannian Manifolds
8/23
434 H. Snoussi
M
p q
Fig. 17.5 Riemannian metric
|||| =
ba
||d
dt||dt=
ba
gi ji j dt
Affine connections. An affine connection is an infinitesimal linear relation p,p
between the tangent spaces of two neighboring points p and p (see Fig. 17.6). It
can be defined by its n 3 connection coefficients ki j (with respect to the coordinate
system[
i
]) as follows:
p,p ((j )p)= (j )p di (ki j )p(k)p
Let p andq be two points on M anda curve linking p and q. If the tangent
vectorsX(t)meet the following relation along the curve:
X(t+d t)= (t),(t+dt)(X(t)),
then, X isparallelalongand is aparallel translationon (see Fig. 17.7).
The covariant derivative of a vector field X along a curve is defined as the
infinitesimal variation betweenX(t) and the parallel translation ofX(t+h) T(t+h)to the space T(t) along . The parallel translation is in fact necessary in order to
consider the limit of the difference of two vectors belonging to the same vector
space. The vectors X(t) and X(t+d t) belong to different tangent spaces and the
quantity d X(t)= X(t+dt)X(t) may not be defined (see Fig. 17.8). The covariant
derivative D Xdt
forms then a vector field along the curveand can be expressed as a
function of the connection coefficients as follows:
D Xdt = ((t+dt),(t)(X(t+ dt)) X(t))/dt= {Xk(t) + i (t)Xj (t)(ki j )(t)}(k)(t)
(17.3)
-
8/10/2019 PF on Riemannian Manifolds
9/23
17 Particle Filtering on Riemannian Manifolds 435
M
p
j
Tp
p
j
j
j
p,pdikijk
Tp
Fig. 17.6 Affine connections
(b)
(a)
(t)(t+dt)
X(a)
X(t) X(t+dt)
X(b)
(t) ,(t+dt)
Fig. 17.7 Parallel translation
The expression (17.3) of the covariant derivative along a curvecan be extended
to define the directional derivative along a tangent vectorDby considering the curve
whose tangent vector is D. The directional derivative, denoted by DX has the
following expression:
DX = Di {(iX
k)p + Xjp(
ki j )p}(k)p.
The covariant derivative along the curvecan then be written as:
-
8/10/2019 PF on Riemannian Manifolds
10/23
436 H. Snoussi
,p
X(t+dt)
(t+dt)
(t)
X(t)
X(t)
Tp
p
Fig. 17.8 Covariant derivative along a curve
D X(t)
dt= (t)X. (17.4)
Consider now two vector fields X and Y on the manifold M. The covariant
derivativeXY Tp(M) ofYwith respect to Xcan be defined by the following
expression:
XY = Xi {i Y
k +Y j ki j }k. (17.5)
The expression(17.5) of the covariant derivative can be used as a characterization
of the connection coefficients ki j . In fact, takingX =i and Y =j , the connection
coefficients are characterized as follows:
ij =ki jk.
A differentiable manifoldM is said to be flat if and only if there exists a coordinate
system[i ]such that the connection coefficients {ki j }are identically 0. This means
that all the coordinate vector fieldsi are parallel along any curveon M.
Riemannian connection. A Riemannian connection is an affine connection defined on a Riemannian manifold(M, g =)such thatX, Y,Z T(S), the
following property holds:
-
8/10/2019 PF on Riemannian Manifolds
11/23
17 Particle Filtering on Riemannian Manifolds 437
Z < X, Y >=+ < X, ZY > (17.6)
where the left hand side of the equation means the differential operator Zapplied to
the scalar function< X, Y >on the manifold.
Letbe a curve on the manifold M and D Xdt et DYdt the covariant derivatives ofX and Y along respectively. According to the expression (17.4) of the covariant
derivative and the fact that the differential operator (t) consists of deriving with
respect tot, one has the following interesting identity concerning the variation of the
scalar product on the manifold with a Riemannian connection:
d
dt< X(t), Y(t) >=+ < X(t),
DY(t)
dt>
The above equation means that the scalar product is conserved under a paralleltranslation (D X(t)dt
= DY(t)dt
=0):
< (X), (Y) >=< X, Y > .
A particular example is the Euclidean space which is a flat manifold characterized
by a Riemannian connection.
Geodesics. A geodesic between two endpoints (a) and(b) on a Riemannian
manifold (M, g, ) is a curve : [a, b] M which is locally defined as the
shortest curve on the manifold connecting these endpoints. More formally, the defi-
nition of a geodesic is given by:
Definition 17.3 The parametrized curve(t)is said to be a geodesic if its velocity
(tangent vector) d/dtis constant (parallel) along, that is if it satisfies the condition
(D/dt)(d/dt)= 0, fora
-
8/10/2019 PF on Riemannian Manifolds
12/23
438 H. Snoussi
Ep(X)
M
Tp(M)
p
X
Fig. 17.9 Exponential mapping on the manifold
D(p, q)= ||g|| =
ba
gi ji j dt. (17.8)
The geodesic distance can also be defined as the shortest distance (over smooth
curves) between two points on the manifold endowed by a Riemannian connection.Exponential mapping. The exponential mapping is a central concept when
designing filtering methods on Riemannian manifolds. In fact, it represents an inter-
esting tool to build a bridge between an Euclidean space and the Riemannian man-
ifold. For a point p and a tangent vector X Tp(M), let : t = (t) be the
geodesic such that (0) = p and ddt
(0) = X. The exponential mapping of X is
defined as Ep(X) = (1). In other words, the exponential mapping assigns to the
tangent vector Xthe endpoint of the geodesic whose velocity at time t = 0 is the
vector X(see Fig. 17.9). It can be shown that there exist an neighborhood Uof 0 in
Tp(M)and a neighborhoodV ofpin M such that Ep |Uis a diffeomorphism fromU toV. Also, note that since the velocityd/dtis constant along the geodesic(t),
its length L from pto Ep(X)is:
L =
10
d
dtdt=
10
Xdt = X.
The exponential mappingEp(X) corresponds thus to the unique point on the geodesic
whose distance from pis the length of the vectorX.
-
8/10/2019 PF on Riemannian Manifolds
13/23
17 Particle Filtering on Riemannian Manifolds 439
T(M) vt
xt=Ep(vt)
xt+1
xt1
M
vt+1
vt+2
Fig. 17.10 Markov chain on a Riemannian manifold
17.4 Particle Filtering on Riemannian Manifolds
17.4.1 General Scheme
The aim of this section is to propose a general scheme for the extension of the particle
filtering method on a Riemannian manifold. The hidden state x is constrained to lie
in a Riemannian manifold (M,g, ) endowed with a Riemannian metric g and
an affine connection . The system evolves according to the following nonlinear
dynamics: xt px(xt | xt1, ut), x M
yt py (yt | xt, ut), (17.9)
where the Markov chain (random walk) px(xt | xt1, ut) on the manifold M is
defined according to the following generating mechanism:
1. Draw a sample vton the tangent space Txt1M according to a pdf pv(.).
2. x is obtained by the exponential mapping of vt according to the affine
connection.
In other words, a random vector vt is drawn on the tangent space Txt1M
by the usual Euclidean random technics. Then, the exponential mapping allows
the transformation of this vector to a point xt on the Riemannian manifold. The
point xt is the endpoint of the geodesic starting from xt1 with a random initial
velocity vector vt. Figure 17.10illustrates the transition dynamics on a Riemannian
manifold M.As a generating stochastic mechanism is defined on the tangent space, the particle
filtering is naturally extended by means of the exponential mapping. It simply consists
in propagating the trajectories on the manifold by the random walk process, weighting
-
8/10/2019 PF on Riemannian Manifolds
14/23
440 H. Snoussi
the particles by the likelihood function and sampling with replacement. The proposed
general scheme is depicted in the pseudo-code Algorithm 17.2.
Algorithm 17.2Particle filter algorithm on a Riemannian manifold M1: function PF(PP)
2: Initializationx(i )0 p0(x)
3: for t=1 toT do(Sequential importance sampling)4: fori =1, ...,N do(sample from the random walk on M)
5: v(i )t pv (v) on Txt1M
6: x(i )t = Ex(i)t1
(v(i )t )
7: set( x(i )0:t)= ( x
(i )t ,x
(i )0:t1)
8: end for
9: Update the importance weights
10: for i =1, ...,N do(evaluate and normalize the weights)11: w
(i )t p(yt | x
(i)t )
12: end for
13: Resampling:
14: Select with replacement from { x(i)0:t}
Ni =1 with probability {w
(i)t } to obtain N particles
x(i )0:t}
Ni=1
15: end for
16: end function
17.4.2 Point Estimates
Based on particle trajectories{ x(i )0:T}, classical particle filtering algorithm provides a
simple way to approximate point estimates. In fact, any quantity of interesth(x)can
be estimated by its a posteriori expectation, minimizing the expected mean square
error. The empirical mean of the transformed particles h(x(i )t ) represents an unbiased
Mont-Carlo estimation of the a posteriori expectation. Averaging in the manifoldcontext is no more a valid operation: The empirical mean could be located outside
the manifold or the averaging itself does not have a meaning in the absence of a
summation operator on the manifold. In order to obtain a valid point estimate, one
should rather minimize the mean square error, where the error is evaluated by the
geodesic distance D on the manifold (17.8). Following the work of Frchet [17],
the point estimate can be defined by the intrinsic mean (also called Riemannian
barycenter). The intrinsic mean has the following expression:
xt =arg minxtME(D(xt,st))2 (17.10)=arg minxtM
(D(xt,st))
2p(st | y1..T)dst
-
8/10/2019 PF on Riemannian Manifolds
15/23
17 Particle Filtering on Riemannian Manifolds 441
where the expectation operator is computed with respect to the a posteriori probability
density p(st | y1..T)and a Riemannian measuredinduced by the Riemannian met-
ric.
Remark 17.2 Note that the above estimator (17.10) does not yield the a poste-riori expectation in general. This is only the case when the manifold is flat with
respect to a Riemannian connection (Euclidean space). In fact, assume that[i ]
is a coordinate system corresponding to null Christoffel coefficients (ki j = 0).
A geodesic between 2 points p and q is then a straight line with coordinates
(p) + t((q) (p)). The geodesic distance D(p, q) (17.8) simplifies to a
quadratic distance
(i (p) i (q))2 leading to the usual Euclidean estimator
xt = E[xt | y1..T].
Computation of the point estimate (17.10) involves an integration operation (with
respect to st M and according to the posterior distribution) and a constrainedoptimization operation on the manifold M. The integral can be approximated (as in
the Euclidean case) by an empirical weighted sum of the geodesic distances applied
on the particles which are yielded within their weights by the particle filter Algorithm
17.2. The point estimate is then computed by the minimization of an approximated
expectation expression:
xt =arg min
xtM
N
i =1 w(i )t (D(xt,s
(i )t ))
2 (17.11)
where s(i )t andw
(i )t are the particles and their weights computed recursively by the
particle filter algorithm.
Concerning the constrained optimization in (17.11), more specific differential
geometric considerations should be taken into account. First, existence and unique-
ness of the intrinsic mean is shown by Karcher [18] when the manifold M has a
non positive sectional curvature. Second, a gradient descent like algorithm can be
designed on the manifold based on the exponential mapping which plays again a key
role in transferring Euclidean technics to a Riemannian manifold context. Denotingby J(xt)the objective function to be minimized with respect to xt,
J(xt)=
Ni =1
w(i )t (D(xt,s
(i )t ))
2,
a gradient flowx(l)t , starting from an initial guessx
(l)t and converging to the solution
xt, can be defined by moving in the direction of the opposite of the objective function
derivativeJ(x
(l)
t ). As the function derivative J(x
(l)
t ) lies in the tangent spaceTx
(l)t
(M), the exponential mapping can be used to map the opposite derivative vector
tothenextpointx(l+1)t . The gradient-like descent algorithm is then derived as follows:
-
8/10/2019 PF on Riemannian Manifolds
16/23
442 H. Snoussi
Tx(l)t
(M)
M
x(l+1)t =E
x(l)t
(J)J x(l)t
Fig. 17.11 A gradient descent step on a Riemannian manifold
x(l+1)t =Ex(l)t
(J(x(l)t )) (17.12)
Figure 17.11illustrates an iteration of the gradient descent algorithm on a Rie-
mannian manifold.
Remark 17.3 The implementation of the proposed particle filter algorithm on the
manifoldM and the computation of the point estimates require an explicit expressionof the exponential mapping. In other words, solving geodesic differential Eq. (17.7)
conditions the feasibility of the manifold version of the particle filter algorithm.
Explicit analytic expressions are only available in some cases. Among these cases,
one can find:
Flat manifolds (with constant null connections ) where geodesics are straight
lines.
The set of Gaussian probability densities with fixed mean: This example will play
a central role in the next Sect. 17.5devoted to the target tracking application.
17.5 Application to Tracking with Unknown Time-Varying State
Covariance
This section is devoted to the application of the above developed framework to design
an efficient target tracking algorithm. The target state is assumed to be observed
according to the general system (17.9), where the observation equation is assumed
to have a general form depending on the sensing model. Concerning the transition
dynamics px(xt | xt1), we adopt a mean-scale mixture model. According to this
model, the hidden statext Rnx (belonging to an Euclidean space) has a Gaussian
distribution with a random mean tand a random covariance matrix t. The mean
-
8/10/2019 PF on Riemannian Manifolds
17/23
17 Particle Filtering on Riemannian Manifolds 443
follows a Gaussian random walk reflecting the time correlation of the system tra-
jectory and the covariance matrix follows a Generalized Gaussian random walk
on the Riemannian manifold of positive definite matrices S+. The transition prior is
thus defined by an augmented Markov state(t,t,x t)as follows:t N(t |t1, )
t GN(t | t1,)
xt N(xt |t,t)
(17.13)
Contrary to the usual assumption of a constant known covariance, the case of
a stochastic varying state covariance represents an elegant way to deal with abrupt
changes in state trajectories. In fact, this parametric family is able to describe the fat
tails and the skewness of the regression modelpx(xt | xt1, ut). In fact, the resulting
regression model can be written in an integral form:
px(xt | xt1, ut)=
p(t,t | xt1)N(xt; t,t)dtdt
showing that the regression model is an infinite continuous mixture of Gaussian mod-
els. This model can be considered as the extension of the scalar Generalized Hyper-
bolic distributions introduced by Barndorff-Nilesen [19] to a multivariate regression
context.
Before defining the Generalized Gaussian random walkGNof covariance matri-
ces and the particle filter algorithm, we introduce hereafter the expressions of the
Riemannian metric and the Riemannian connections in the special case of the Rie-
mannian manifold S+. Closed forms for the geodesic curves and geodesic distances
are also obtained, providing an efficient implementation of the general particle filter
scheme and the point estimate computation proposed in the previous Sect. 17.4.
17.5.1 Space of Positive Definite Matrices
A positive definite matrix can represent the covariance matrix of a zero-mean mul-
tivariate normal distributionN(0,). Therefore, the set of positive definite matrices
S+can be identified with the statistical model of multivariate Gaussian distributions.
Analyzing the geometric structure of parametric statistical models based on differ-
ential geometric tools was first suggested by Rao in 1945[20]. Since then, many
works have been dedicated to the analysis of statistical manifolds in the light of dif-
ferential geometry. In particular, the seminal work of Amari[21] led to a significant
advancement in this new field.
In the work of Rao [20], it was suggested that the Fisher Information matrixprovides a natural Riemannian metric on statistical manifolds. Denoting by p(.| )a point of a statistical parametric manifold, the Fisher metric is expressed as:
-
8/10/2019 PF on Riemannian Manifolds
18/23
444 H. Snoussi
gi j ()= E
log p(x |)
i
log p(x |)
j
=
X
log p(x |)
i
log p(x |)
jp(x |)d(x)
Assuming that the connection is symmetric and torsion free, the Riemannian con-
nection can be uniquely defined given the Riemannian metric. It is determined by
the following expression of its Christoffel symbols of the second kind:
ki j = gkm i j m =
1
2gkm (
gj m
i+gi m
jgi j
k),
whereg km are the elements ofg 1 (inverse Fisher matrix).
Applying the above expressions to the case of the manifoldS+ = {N(0;), >
0}of multivariate normal distributions, a closed form for the Riemannian metric is
derived as follows:
g(Bi,j ,Bk,l )=< Bi,j ,Bk,l >= 1
2trace{1Bi,j
1Bk,l }, i, j, k, l =1..nx
(17.14)
where{Bi,j }is the canonical basis of the tangent space TS+which coincides with
the space of real symmetric matrices S. The matrix Bi,j is expressed as follows:
Bi,j = 1ii , i = j
1i j
+1j i
, i = j
with 1i j standing for the matrix with 1 at rowi and column j and 0 elsewhere.
A closed form for the geodesic curve is derived in [22] for the general case of
multivariate normal distributions. Here, we only consider the case of multivariate
normal distributions with a fixed zero-mean. Denoting by (r s ), r s, s =1..nx the
components of the positive definite matrix and using the explicit expressions of the
Riemannian metric and connections, the Euler-Lagrange equations (17.7) reduces to
the following matrix-form differential equation:
d2(t)
dt2
d(t)
dt
1(t)d(t)
dt=0,
leading to the following closed form of a geodesic (t)starting from (0)with an
initial velocity (0):
(t)= (0)1/2 exp [tx](0)1/2, (17.15)
where the matrix x T(0)S+ is defined as,
(0)= (0)1/2x(0)1/2,
and exp [.] stands for the usual matrix exponentiation.
-
8/10/2019 PF on Riemannian Manifolds
19/23
17 Particle Filtering on Riemannian Manifolds 445
The geodesic distance between two matrices1and 2 D (length of the geodesic
curve between 1 and 2) has an explicit analytic form as well:
D(1,2)= Ln(1/21 2
1/21 )
=1
2
nxi =1log
2(i )
where Ln(.)is the matrix logarithm defined by Ln(exp[A])= Afor ASandiare the eigenvalues of the matrix
1/21 2
1/21 .
17.5.2 Particle Filter Implementation
Given the explicit analytic expression of the geodesic curve(17.15)for the space S+of positive definite matrices, the generating mechanism of a Gaussian random walk
GN(t | t1,)(as defined in Sect. 17.4), has the following steps:
1. Sample a Gaussian symmetric velocity matrix B S with a precision
( nx(nx+1)2
nx(nx+1)2
matrix): B N(0;)
2. The next matrix tis then obtained by:
t =Et1 (B)= 1/2t1exp
1/2t1 B
1/2t1
1/2t1
The proposed particle filter jointly estimate the hidden target positionx t(belong-
ing to an Euclidean space) and its covariance t (belonging to the Riemannian
manifold S+) as follows (see Algorithm 17.3):
1. Propagate the trajectories ((i )0:t1,
(i )0:t1,x
(i )0:t1) by generating the samples
((i )t ,
(i )t ,x
(i )t )according to the prior model (17.13).
2. Update the importance weights which are proportional to the likelihood function.
The explicit solution of the geodesic distance allows also the implementation of
the intrinsic mean for the tracking of the covariance matrix. In fact, approximatingthe expected error by the empirical weighted sum of geodesic distances, the point
estimate is defined as follows:
t = arg minS+
Ni =1
w(i )t (D(,
(i )t ))
2
= arg minS+
Ni =1
w(i )t
1
2trL n2(1/2
(i )t
1/2)
The gradient of the objective function, belonging to the tangent space TS+, has
the following expression:
-
8/10/2019 PF on Riemannian Manifolds
20/23
446 H. Snoussi
J()=
N
Ni =1
Ln(((i )t )
1) (17.16)
Given the explicit expression of both the gradient (17.16) and the exponentialmapping (17.15) on the manifoldS+, the gradient-descent algorithm scheme defined
in Sect. 17.4for the computation oft is efficiently implemented. Given an initial
guess (0)
, a gradient flow (l)
evolving towards the solution is defined as follows:
(l+1)
=E
(l) (J((l)
))
= ((l)
)1/2 exp
((l)
)1/2J((l)
)1/2
((l)
)1/2
Algorithm 17.3Particle filter algorithm for tracking
1: function PF(PP)
2: Initialization((i )0 ,
(i)0 ,x
(i )0 ) p0
3: for t=1 toT do(Sequential importance sampling)4: fori =1, ...,N do(sample from the random walk prior)
5: (i )t px(t |
(i )t1)
6: B(i )t N(0;) on T(i )t1
S+
7: (i )t = E(i )t1
(B(i )t )
8: x(i )t N((i)t ; (i)t )
9: set (i)t = (
(i )t ,
(i )t ,x
(i )t ) (Augmented state)
10: set ((i )0:t) = (
(i )t ,
(i )0:t1)
11: end for
12: Update the importance weights
13: for i =1, ...,N do(evaluate and normalize the weights)
14: w(i )t p(yt | x
(i)t )
15: end for
16: Resampling:
17: Select with replacement from{(i )0:t}
Ni =1 with probability{w
(i )t }
18: end for
19: end function
17.5.3 Simulation Results
We consider the tracking of a target moving over a 2-D field. The statex t = [xpt ,x
vt]
is formed by the position and the velocity of the target. For simplicity, we assume a
kinematic parametric model for the transition dynamics of the hidden state:
-
8/10/2019 PF on Riemannian Manifolds
21/23
17 Particle Filtering on Riemannian Manifolds 447
40 45 50 55 60 650
10
20
30
40
50
60
70
80
90True Trajectoy
Estimated trajectory
Rangebearing sensor
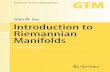
Fig. 17.12 Target tracking with unknown noise covariance. Note that only the selected nodes are
plotted in the figure
x
pt
xvt
=
1 0 Ts 0
0 1 0 Ts0 0 1 0
0 0 0 1
xpt1
xvt1
+
T2s /2 0
0 T2s /2
Ts 0
0 Ts
ut
where the sampling interval is Ts = 0.1s and ut is a zero-mean white Gaussian
noise.
The observations are obtained through a network of 400 range-bearing sensors
deployed randomly in the field under surveillance. At each time t, a selected node
(according to the proximity to the target) obtains an observation of the target position
through a range-bearing model:
yrtyt= psm xt+0.5arctan s2x2
s1x1
+ tvtwheresm = (s1, s2)and xt = (x1,x2)are the node and the target positions at time
t, p(set to 10) is the energy emitted by the target (measured at a reference distance
of 1 meter) and vtis a white Gaussian random vector. The corrupting noise has a
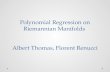
covariance tevolving in time as depicted in Fig. 17.13: constant for the first T/4s,
increasing with a linear slope for T/2s and constant for the lastT/4s.
The particle filter is applied to jointly estimate the target position and the noise
covariance matrix. Figure 17.12 illustrates the target tracking performances. Thetrajectory of the target is recovered with a mean square error of 0.39 m. Figure17.13
illustrates the performance of the algorithm to online track the covariance variation
over time. Note that, despite their fluctuation, the estimated covariance elements
-
8/10/2019 PF on Riemannian Manifolds
22/23
448 H. Snoussi
50 100 150 200 250 300 350 400 450 5000.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4 True valueEstimated value
11
50 100 150 200 250 300 350 400 450 5000.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4 True valueEstimated value
12
50 100 150 200 250 300 350 400 450 5000.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
True valueEstimated value
21
50 100 150 200 250 300 350 400 450 5000.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
Estimated valueTrue value
22
Fig. 17.13 Online estimation of the noise covariance elements
follow the tendency of the true covariance elements. The fluctuation of the estimated
noise covariance is mainly due to the fact that the data are less informative with
respect to the covariance matrix. In fact, unlike the target position estimation, the
online estimation of the covariance t is an ill-posed problem based on only one
observation yt. The success of the algorithm to approximately recover the tendency
of the covariance matrix is due to the Markov prior regularization defined by the
Generalized Gaussian random walkGN
(
t |
t1,
) defined in the previoussubsection.
17.6 Conclusion
A differential-geometric framework is proposed to implement the particle filtering
algorithm on Riemannian manifold. The exponential mapping plays a central role
in connecting the manifold-valued particles to the samples generated on the tangent
space by the usual random generating techniques on Euclidean spaces. The proposed
algorithm has been applied to jointly track the target position with the time-varying
noise covariance.
-
8/10/2019 PF on Riemannian Manifolds
23/23
17 Particle Filtering on Riemannian Manifolds 449
References
1. Doucet, A., Godsill, S., Andrieu, C.: On sequential Monte Carlo sampling methods for Bayesian
filtering. Stat. Comput.10(3), 197208 (2000)
2. Liu, X., Srivastava, A., Gallivan, K.: Optimal linear representations of images for object recog-nition. IEEE Pattern Anal. Mach. Intell. 25(5), 662666 (2004)
3. Lenglet, C., Rousson, M., Deriche, R., Faugeras, O.: Statistics on the manifold of multivari-
ate normal distributions: theory and application to diffusion tensor MRI processing. J. Math.
Imaging Vis.25, 423444 (2006)
4. Fiori, S.: Geodesic-based and projection-based neural blind deconvolution algorithms. Signal
process.88, 521538 (2008)
5. Srivastava, A., Klassen, E.: Bayesian and geometric subspace tracking. Adv. Appl. Probab.
36(1), 4356 (2004)
6. Edelman, A., Arias, T.A., Smith, S.T.: The geometry of algorithms with orthogonality con-
straints. SIAM J. Matrix Anal. Appl.20(2), 303353 (1998)
7. Manton, J.H.: Optimization algorithms exploiting unitary constraints. IEEE Trans. SignalProcess.50(3), 63565 (2002)
8. Bhattacharya, R., Patrangenaru, V.: Large sample theory of intrinsic and extrinsic sample means
on manifolds, I. Ann. Stat. 31(1), 129 (2003)
9. Bhattacharya, R., Patrangenaru, V.: Large sample theory of intrinsic and extrinsic sample means
on manifolds, II. Ann. Stat. 33(3), 12251259 (2005)
10. Pennec, X.: Intrinsic statistics on Riemannian manifolds: basic tools for geometric measure-
ments. J. Math. Imaging Vis.25(1), 127154 (2006)
11. Smith, S.T.: Optimization techniques on Riemannian manifolds, Hamiltonian and gradient
flows, algorithms and control. In: Bloch, A. (ed.) Fields Institute Communication, vol. 3.
American Mathematical Society: Providence, RI, pp. 113136 (1994)
12. Absil, P.-A., Mahony, R., Sepulchre, R.: Optimization Algorithms on Matrix Manifolds. Prince-ton University Press, New Jersey (2008)
13. Snoussi, H., Mohammad-Djafari, A.: Particle Filtering on Riemannian Manifolds. In:
Mohammad-Djafari, A. (ed.) Bayesian Inference and Maximum Entropy Methods, MaxEnt
Workshops, July 2006, pp. 219226, American Institute Physics
14. Doucet, A., de Freitas, N., Gordon, N.J.: Sequential Monte Carlo Methods in Practice. Springer,
Berlin (2001)
15. Andrieu, C., Doucet, A., Singh, S., Tadic, V.: Particle methods for change detection, system
identification, and control. Proc. IEEE92(3), 423438 (March 2004)
16. Boothby, W.M.: An Introduction to Differential Manifolds and Riemannian Geometry. Acad-
emic Press, Orlando (1986)
17. Frchet, M.: Leslments alatoires de nature quelconque dans un espace distanci. Ann. Inst.H, Poincar10, 215310 (1948)
18. Karcher, H.: Riemannian centre of mass and mollifier smoothing. Comm. Pure Appl. Math.
30, 509541 (1977)
19. Barndorff-Nielsen, O.: Exponentially decreasing distributions for the logarithm of particle size.
Proc. Roy. Soc. Lond.353, 401419 (1977)
20. Rao, C.R.: Information and accuracy attainable in the estimation of statistical parameters. Bull.
Calcutta Math. Soc.37, 8191 (1945)
21. Amari, S.: Differential-Geometrical Methods in Statistics, Volume 28 of Springer Lecture
Notes in Statistics. Springer, New York (1985)
22. Calvo, M., Oller, J.: An explicit solution of information geodesic equations for the multivariate
normal model. Stat. Decis.9, 119138 (1991)