IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014 579 PAPER Special Section on Information and Communication Technology for Medical and Healthcare Applications in Conjunction with Main Topics of ISMICT2013 Performance Evaluation on RSSI-Based Wireless Capsule Endoscope Location Tracking with Particle Filter Takahiro ITO † , Student Member, Daisuke ANZAI †a) , Member, and Jianqing WANG †b) , Fellow SUMMARY Tracking capsule endoscope location is one of the promis- ing applications offered by implant body area networks (BANs). When tracking the capsule endoscope location, i.e., continuously localize it, it is effective to take the weighted sum of its past locations to its present lo- cation, in other words, to low-pass filter its past locations. Furthermore, creating an exact mathematical model of location transition will improve tracking performance. Therefore, in this paper, we investigate two tracking methods with received signal strength indicator (RSSI)-based localization in order to solve the capsule endoscope location tracking problem. One of the two tracking methods is finite impulse response (FIR) filter-based tracking, which tracks the capsule endoscope location by averaging its past locations. The other one is particle filter-based tracking in order to deal with a nonlinear transition model on the capsule endoscope. However, the particle filter requires that the particle weight is calculated according to its condition (namely, its likelihood value), while the transition model on capsule endoscope location has some model parameters which cannot be estimated from the received wireless signal. Therefore, for the purpose of applying the particle filter to capsule endoscope tracking, this paper makes some modifications in the resampling step of the particle filter algorithm. Our computer simulation results demonstrate that the two tracking methods can improve the performance as compared with the conventional maximum likelihood (ML) localization. Furthermore, we confirm that the particle filter-based tracking outperforms the conventional FIR filter-based tracking by taking the realistic capsule endoscope transition model into considera- tion. key words: implant BANs, localization, tracking, RSSI, maximum likeli- hood estimation, finite impulse response filter, particle filter 1. Introduction In recent years, wireless body area networks (BANs) have attracted lots of attention with respect to medical and health- care applications [1]–[3]. Wireless BANs realize novel med- ical and healthcare applications such as wireless capsule en- doscopy (WCE). The WCE has drawn considerable atten- tion due to its non-invasive nature, and furthermore, it in- volves ingesting a small capsule, which contains a color camera, battery, light source and transmitter. The capsule endoscope takes pictures every second and transmits images to a data recorder in order to assist in diagnosing gastroin- testinal conditions. As a result, it enables the doctor to vi- sualize the entire gastrointestinal (GI) tract without patient trauma. In addition, the location information of the capsule endoscope can help diagnosing GI conditions and assisting the physicians for follow-up interventions. However, since Manuscript received July 2, 2013. Manuscript revised October 22, 2013. † The authors are with Nagoya Institute Technology, Nagoya- shi, 466-8555 Japan. a) E-mail: [email protected] b) E-mail: [email protected] DOI: 10.1587/transcom.E97.B.579 a capsule endoscope moves inside a human body, nobody knows the location of the capsule endoscope in advance. Therefore, in the capsule endoscopy systems, it is signifi- cant to estimate and track the capsule endoscope location. Various localization methods for the capsule endoscope have been so far proposed [4]–[9]. For example, local- ization technologies include ultrasound [4], time of arrival (TOA)-based pattern recognition [5], magnetic tracking [6], [7] and computer vision [8], [9]. In these technologies, the localization with radio frequency (RF) signals are advan- tageous in terms of relatively low cost for implementation due to requiring no specific device. Generally, RF-based localization methods are based on measuring the distances between transceivers, such as TOA-, time difference of ar- rival (TDOA)-, angle of arrival (AOA)- and received sig- nal strength indicator (RSSI)-based ranging [10]–[12]. It is well known that TOA-based localization achieves higher estimation accuracy than the other techniques. However, although high resolution of TOA estimation requires wide bandwidth of wireless communication signals, medical im- plant communication services (MICS) band limits the band- width (402–405 MHz). Furthermore, human tissue absorp- tion strengthens as the frequency band rises. In this paper, we pay attention to an RSSI-based loca- tion estimation method. This is because it is advantageous in terms of cost and energy consumption since most of the cur- rent wireless communication standards have a function of measuring RSSI in their protocols [13]. As related works, an RSSI-based triangulation system, which employs an ex- ternal sensor array that measures signal strength of capsule transmissions at multiple points, has been proposed, and the average experimental error is reported to be 3.7 cm [14]. The required accuracy may be 1 cm at least because we should be able to estimate a WCE location within the size of itself, i.e., around 1cm. In order to further improve the per- formance of RSSI-based localization, the use of a maximum likelihood (ML) estimation is effective [15], [16]. However, to use an ML estimation method, a statistical model on the RSSI, which can well characterize the real variation of the RSSI in the location estimation area is required in advance. So, in order to successfully apply an ML estimation tech- nique to capsule endoscope localization, we have so far in- vestigated the statistical model of the propagation character- istics of MICS band signals by using finite-difference time- domain (FDTD) simulations [17]. In applying the RSSI-based ML localization to a cap- sule endoscope location tracking problem, it is important to Copyright c 2014 The Institute of Electronics, Information and Communication Engineers

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014579
PAPER Special Section on Information and Communication Technology for Medical and Healthcare Applications in Conjunction with Main Topics of ISMICT2013
Performance Evaluation on RSSI-Based Wireless CapsuleEndoscope Location Tracking with Particle Filter
Takahiro ITO†, Student Member, Daisuke ANZAI†a), Member, and Jianqing WANG†b), Fellow
SUMMARY Tracking capsule endoscope location is one of the promis-ing applications offered by implant body area networks (BANs). Whentracking the capsule endoscope location, i.e., continuously localize it, it iseffective to take the weighted sum of its past locations to its present lo-cation, in other words, to low-pass filter its past locations. Furthermore,creating an exact mathematical model of location transition will improvetracking performance. Therefore, in this paper, we investigate two trackingmethods with received signal strength indicator (RSSI)-based localizationin order to solve the capsule endoscope location tracking problem. Oneof the two tracking methods is finite impulse response (FIR) filter-basedtracking, which tracks the capsule endoscope location by averaging its pastlocations. The other one is particle filter-based tracking in order to dealwith a nonlinear transition model on the capsule endoscope. However, theparticle filter requires that the particle weight is calculated according toits condition (namely, its likelihood value), while the transition model oncapsule endoscope location has some model parameters which cannot beestimated from the received wireless signal. Therefore, for the purpose ofapplying the particle filter to capsule endoscope tracking, this paper makessome modifications in the resampling step of the particle filter algorithm.Our computer simulation results demonstrate that the two tracking methodscan improve the performance as compared with the conventional maximumlikelihood (ML) localization. Furthermore, we confirm that the particlefilter-based tracking outperforms the conventional FIR filter-based trackingby taking the realistic capsule endoscope transition model into considera-tion.key words: implant BANs, localization, tracking, RSSI, maximum likeli-hood estimation, finite impulse response filter, particle filter
1. Introduction
In recent years, wireless body area networks (BANs) haveattracted lots of attention with respect to medical and health-care applications [1]–[3]. Wireless BANs realize novel med-ical and healthcare applications such as wireless capsule en-doscopy (WCE). The WCE has drawn considerable atten-tion due to its non-invasive nature, and furthermore, it in-volves ingesting a small capsule, which contains a colorcamera, battery, light source and transmitter. The capsuleendoscope takes pictures every second and transmits imagesto a data recorder in order to assist in diagnosing gastroin-testinal conditions. As a result, it enables the doctor to vi-sualize the entire gastrointestinal (GI) tract without patienttrauma. In addition, the location information of the capsuleendoscope can help diagnosing GI conditions and assistingthe physicians for follow-up interventions. However, since
Manuscript received July 2, 2013.Manuscript revised October 22, 2013.†The authors are with Nagoya Institute Technology, Nagoya-
shi, 466-8555 Japan.a) E-mail: [email protected]) E-mail: [email protected]
DOI: 10.1587/transcom.E97.B.579
a capsule endoscope moves inside a human body, nobodyknows the location of the capsule endoscope in advance.Therefore, in the capsule endoscopy systems, it is signifi-cant to estimate and track the capsule endoscope location.
Various localization methods for the capsule endoscopehave been so far proposed [4]–[9]. For example, local-ization technologies include ultrasound [4], time of arrival(TOA)-based pattern recognition [5], magnetic tracking [6],[7] and computer vision [8], [9]. In these technologies, thelocalization with radio frequency (RF) signals are advan-tageous in terms of relatively low cost for implementationdue to requiring no specific device. Generally, RF-basedlocalization methods are based on measuring the distancesbetween transceivers, such as TOA-, time difference of ar-rival (TDOA)-, angle of arrival (AOA)- and received sig-nal strength indicator (RSSI)-based ranging [10]–[12]. Itis well known that TOA-based localization achieves higherestimation accuracy than the other techniques. However,although high resolution of TOA estimation requires widebandwidth of wireless communication signals, medical im-plant communication services (MICS) band limits the band-width (402–405 MHz). Furthermore, human tissue absorp-tion strengthens as the frequency band rises.
In this paper, we pay attention to an RSSI-based loca-tion estimation method. This is because it is advantageous interms of cost and energy consumption since most of the cur-rent wireless communication standards have a function ofmeasuring RSSI in their protocols [13]. As related works,an RSSI-based triangulation system, which employs an ex-ternal sensor array that measures signal strength of capsuletransmissions at multiple points, has been proposed, and theaverage experimental error is reported to be 3.7 cm [14].The required accuracy may be 1 cm at least because weshould be able to estimate a WCE location within the size ofitself, i.e., around 1cm. In order to further improve the per-formance of RSSI-based localization, the use of a maximumlikelihood (ML) estimation is effective [15], [16]. However,to use an ML estimation method, a statistical model on theRSSI, which can well characterize the real variation of theRSSI in the location estimation area is required in advance.So, in order to successfully apply an ML estimation tech-nique to capsule endoscope localization, we have so far in-vestigated the statistical model of the propagation character-istics of MICS band signals by using finite-difference time-domain (FDTD) simulations [17].
In applying the RSSI-based ML localization to a cap-sule endoscope location tracking problem, it is important to
Copyright c© 2014 The Institute of Electronics, Information and Communication Engineers

580IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014
take its behavioral nature in consideration because the cap-sule endoscope is continuously localized. For example, itspresent location is strongly related to its past locations, sowe can track it better by low-pass filtering its past locations.Furthermore, if we know the mathematical model of the lo-cation transition of the capsule endoscope, the tracking per-formance can be improved even more. However, in the caseof a capsule endoscope tracking, the model is expected to benonlinear in reality, so we can have two approaches in thiscase, one is an extended Kalman filter and the other is a par-ticle filter [18]–[21]. In this paper, we focus on the particlefilter-based tracking method. As for the transition model ofthe capsule endoscope location, the movement can be wellmodeled as a random way point model [22]. If we employthe random way point model as the transition model of thecapsule endoscope, some parameters in the model can notbe estimated by received wireless signal. The particle fil-ter requires to calculate the particle weight according to itscondition (namely, its likelihood value), so it is difficult todirectly apply the particle filter to the capsule endoscope lo-cation tracking. Therefore, in order to solve this problem,we propose to modify the resampling step of the particle fil-ter algorithm.
In this paper, to begin with, we present the propaga-tion characteristics of the 400 MHz MICS band signals, andexplain the ML localization method based on the propaga-tion characteristics. In Sect. 3, we describe a finite impulseresponse (FIR) filter-based tracking method as a candidatefor comparison, which is just a simple moving average filter,namely, takes the weighted sum of the past estimated loca-tions of the capsule endoscope. Then, Sect. 4 proposes themodified particle filter-based tracking method to success-fully deal with the random way point state transition model.Finally, in Sect. 5, we evaluate the performances of the twotracking methods by a computer simulation, and discuss theestimation accuracies of the two methods in the capsule en-doscopy systems.
2. Conventional ML Localization
2.1 System Model
We assume that a capsule endoscope is located inside a hu-man body and M receivers are put onto the human body asshown in Fig. 1. The positions of receivers are known inadvance and the capsule endoscope location is unknown, sothe capsule endoscope location should be estimated by theknown receiver location information. We define the three-dimensional locations of the capsule endoscope and the m-threceiver (m = 1, · · · ,M) as
r =[x, y, z
]T (1)
rm =[xm, ym, zm
]T (2)
where (·)T indicates the transpose of (·). Then, the distancebetween the capsule endoscope and the m-th receiver is writ-ten as
Fig. 1 System model for capsule endoscope localization.
dm(r) = |r − rm| (3)
=
√(x − xm)2 + (y − ym)2 + (z − zm)2. (4)
In addition, we also define RSSI vector as
P = [P1, · · · , PM]T (5)
where Pm denotes the RSSI measured at the m-th receiver.Here, assume that Pm is statistically independent of Pm′
(m � m′).
2.2 Propagation Characteristics
To introduce an ML estimation technique into the RSSI-based localization, a statistical model which well representsthe RSSI variation in implant BANs are required. For thispurpose, we have employed an FDTD simulation with ananatomically-based numerical human body model to inves-tigate the propagation characteristics of implant BAN sig-nals [17]. From our investigation based on the FDTD sim-ulations, we have found that the variation of the RSSIs canbe well expressed with the following two-layered model:
μ(d) = log Pr = log[αd−n] (6)
p(Pr |d) =1√
2πσPr
exp
[−{log Pr − μ(d)}2
2σ2
]. (7)
Here, Eq. (6) means the average received power Pr againstthe transceiver distance d, and Eq. (7) indicates that theconditional probability density function on RSSI Pr canbe characterized by the Log-Normal distribution when thetransceiver distance d is given. Note that the channel modelparameters in Eqs. (6) and (7) have been obtained by theFDTD-simulated data as α = 10−7.50, n = 6.65 and σ = 5.50in [17].
2.3 ML Localization
The log-likelihood function on r is defined as
L(r) = log p(P|r). (8)
Based on the investigation of the propagation characteris-tics, replacing d by dm(r) and Pr by Pm respectively in (6)

ITO et al.: PERFORMANCE EVALUATION ON RSSI-BASED WIRELESS CAPSULE ENDOSCOPE LOCATION TRACKING WITH PARTICLE FILTER581
and (7) (also Pr by P), Eq. (8) can be re-written as:
L(r) = log
⎡⎢⎢⎢⎢⎢⎣M∏
m=1
p (Pm|dm(r))
⎤⎥⎥⎥⎥⎥⎦
=
M∑m=1
⎡⎢⎢⎢⎢⎣− log√
2πσPm−(log Pm−μ[dm(r)]
)22σ2
⎤⎥⎥⎥⎥⎦. (9)
The ML Localization method gives the estimated locationr̂ML as a value of r which maximizes L(r), that is, r̂ML can beobtained from the following maximum likelihood equation:
∂L(r)∂r
∣∣∣∣∣r=r̂ML
= 0. (10)
2.4 Cramer-Rao Lower Bound Analysis
The Cramer-Rao lower bound (CRLB) [23] gives a lowerbound on the minimum error variance for the ML estima-tion. The CRLB is given by the diagonal elements of the in-verse of an information matrix JF , which denotes the Fisherinformation matrix representing the information obtainedfrom the measurements. Here, JF is written as
JF = −E
⎧⎪⎪⎨⎪⎪⎩[∂
∂rL(r)
] [∂
∂rL(r)
]T⎫⎪⎪⎬⎪⎪⎭ . (11)
3. FIR Filter-Based Tracking with ML Localization
As a candidate of comparison, we consider an FIR filter-based location tracking method based on the RSSI-basedML localization. Because the capsule endoscope moves in-side the GI tract with a quite slow speed, it is possible toignore the capsule endoscope motion during a short mov-ing average period, namely, the capsule endoscope may betracked by averaging its past locations as it stays at the samepoint. In this sense, we track the capsule endoscope locationwithout using a state transition model of capsule endoscopemovement. We introduce an FIR filter as a moving averagefilter into the capsule endoscope location tracking problem.In this FIR filter, we assume that each filter coefficient isfixed at the same value because each location is estimatedjust by a simple moving average in the FIR filter. In thispaper, we use a discrete-time FIR filter whose output is aweighted sum of the current and a finite number of previousinputs. The FIR filter output is generally represented as
y[n] = b0x[n] + b1x[n − 1] + · · · + bN x[n − N] (12)
=
N∑i=0
bix[n − i] (13)
where n, y[n], x[n] and bi denote the discrete-time index,the n-th filter output, the n-th filter input and the i-th filtercoefficient, respectively. In this paper, we set bi to the samevalue and the sum of the all coefficients
∑Ni=0 bi is set to 1.
To apply this FIR filter to location tracking, with the resultof the ML Localization as the filter input r̂ML[n], we can
Fig. 2 An example of FIR filter-based location tracking system.
obtain the tracked location r̂FIR[n] as
r̂FIR[n] =N∑
i=0
bir̂ML[n − i]. (14)
Finally, Fig. 2 shows an example of the FIR filter-based lo-cation tracking where the number of taps is five.
4. Modified Particle Filter Based Tracking
Particle filter is widely known as a sequential Monte Carlomethod, which is used as one of tools for Bayesian infer-ence. The probability densities can be represented by pointmass (of “particle”) and the particles have information of theparameters of the state transition model. As mentioned be-low, the particle weight represents the likelihood value onlyon the particle location, so the effect for some parameters ofthe state transition model can not be considered in the up-date step. To successfully apply the particle filter to the cap-sule endoscope location tracking problem, we modify theresampling step in the particle filter algorithm to take careof all the state transition model parameters. The particle fil-ter algorithm repeats the following four steps in an iterativemanner.
4.1 Prediction Step
The state of each particle is determined by state transitionmodel of the capsule endoscope location. This paper as-sumes the following random way point model as the realistictransition model [22]:
ri[n] = ri[n − 1] + vi[n]ekiΔt (15)
vi[n] ∼ N(v̄, σv) (16)
eki =
gki − gk−1
i∣∣∣gki − gk−1
i
∣∣∣ (17)
gki ∼⎡⎢⎢⎢⎢⎢⎢⎢⎣U(0, LX)U(0, LY)U(0, LZ)
⎤⎥⎥⎥⎥⎥⎥⎥⎦ (18)
where ri[n], vi[n], v, σv, Δt and gki represent the i-th parti-
cle location at the discrete-time index of n, the velocity of

582IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014
the i-th particle at the discrete-time index of n, the averagevelocity of the capsule endoscope moving, the standard de-viation of the capsule endoscope velocity, the time intervalof the location tracking and the k-th destination location vec-tor of the i-th particle, respectively, andN(μ, σ) andU(a, b)are the Gaussian distribution with mean μ and standard de-viation σ, and the Uniform distribution between a and b,respectively. Note that once particle reaches the destinationlocation (that is gk = rn), k becomes k + 1 so that gk and ek
will be updated.
4.2 Update Step
In the update step, the weight of each particle w̃i[n] at thetime index of n is updated as in the following way:
w̃i[n] = wi[n − 1]p(P1,i, P2,i, · · · , PM,i|ri[n])
= wi[n − 1]M∏
m=1
p(Pm,i|ri[n]) (19)
wi[n] =w̃i[n]∑Np
j=1 w̃ j[n](20)
where wi[n] and Np are the normalized weight of the i-thparticle and the number of particles, respctively. In Eq. (19),the particle weight w̃i[n] can be calculated by the likelihoodfunction represented in Eq. (9).
4.3 Resampling Step with Modification for IntroducingRandom Way Point State Transition Model
As the particle filter algorithm is iteratively performed,some normalized particle weights become negligible. Thisleads to degeneration of the particles, and finally, this phe-nomenon gives a quite bad influence on the sequentialMonte Carlo method. From this reason, it is necessary toremove the particles whose weights are relatively small andregenerate them. For this purpose, we define the effectiveparameter βeff as
βeff =1∑Np
i=1 w2i [n]. (21)
Note that βeff ranges from 1/Np to 1. It is widely used inthe original particle filter algorithm, and its effectiveness hasbeen demonstrated in [20], [21], [24]. Resampling will beproceeded if βeff < βthrNp, where βthr is a threshold whichindicates the particles degeneration. Some particles withnegligible weights are eliminated and regenerated as a copyof the particle with a relatively large weight. Here, the orig-inal particle is chosen with the probability according to itsweight. All the particle weights are then set to 1/Np. Fromthe literature [17], the likelihood function is defied by onlythe location of the capsule endoscope. This is because thatthe RSSI variation is not affected by its moving direction sothat it is difficult to derive the likelihood function based onthe moving direction. It should be pointed out that the parti-cle weight is evaluated based only on the likelihood value at
its particle location, that is, the other parameter, for exam-ple, the destination location of the particle, does not reflectits weight. In order to consider the effect of this parameter,we make the following additional procedure in the resam-pling step:
gk,modi f edi = gk,resampled
i + gposi (22)
gposi ∼ N(0, σpos) (23)
where gk,modi f iedi , gk,resampled
i and σpos denote the modifieddestination location vector of the i-th particle, the destina-tion location vector of the i-th particle regenerated in theoriginal particle filter algorithm and the standard deviationof variational factor gpos
i , respectively.
4.4 Estimation Step
Finally, the estimated location of the particle filter is calcu-lated as
r̂PF[n] =Np∑i=1
wi[n]ri[n]. (24)
5. Performance Evaluation
5.1 Simulation Environment
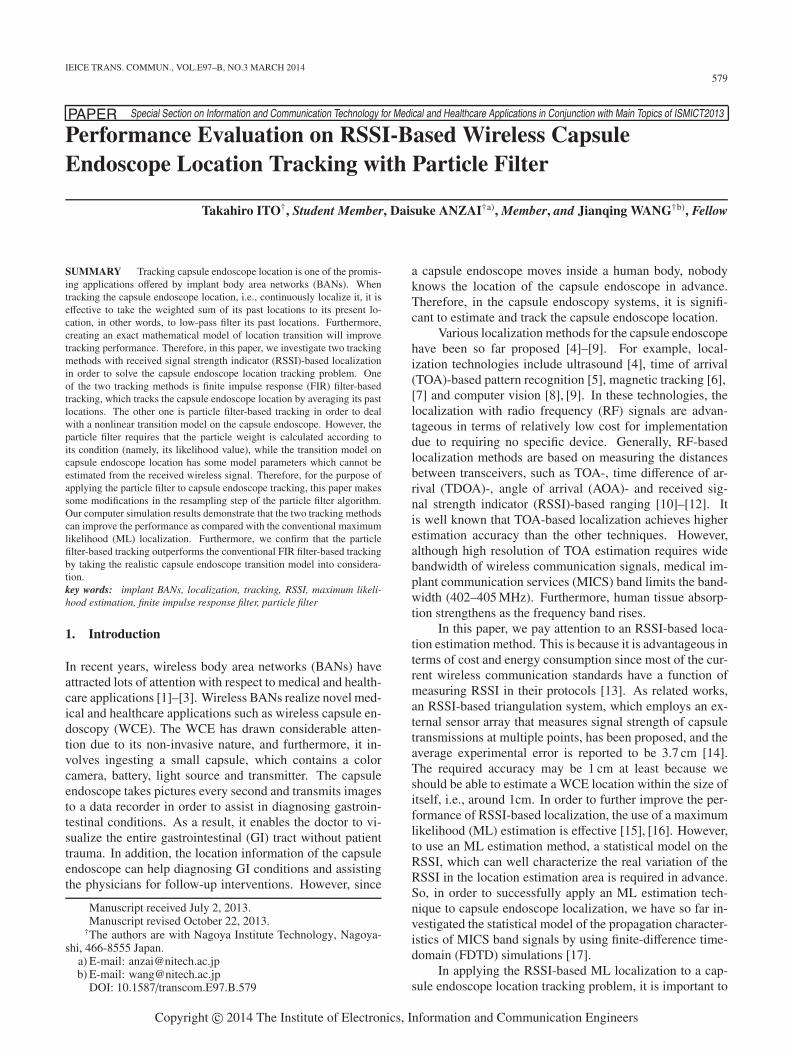
In order to evaluate the performances of the two trackingmethods, we performed computer simulations. In the com-puter simulations, we assumed that the capsule endoscopemoves inside the small intestine according to the randomway point model described in the previous section, and thedestination location of the transition model was determinedbased on the small intestine of the numerical human modelin advance as shown in Fig. 3. The estimation area was as-sumed to a cuboid area around the small intestine, whosesize was LX = 40 cm (width) × LY = 40 cm (height) ×LZ = 20 cm (depth). We put 8 receivers at each vertex ofthe cuboid. The channel model parameters α, n and σ inEqs. (6) and (7) were determined from the FDTD-simulationresults as α = 10−7.50, n = 6.65 and σ = 5.50 as described in[17]. The computer simulation parameters are summarizedin Table 1.
5.2 Effect of Filter Parameters on Localization Perfor-mance
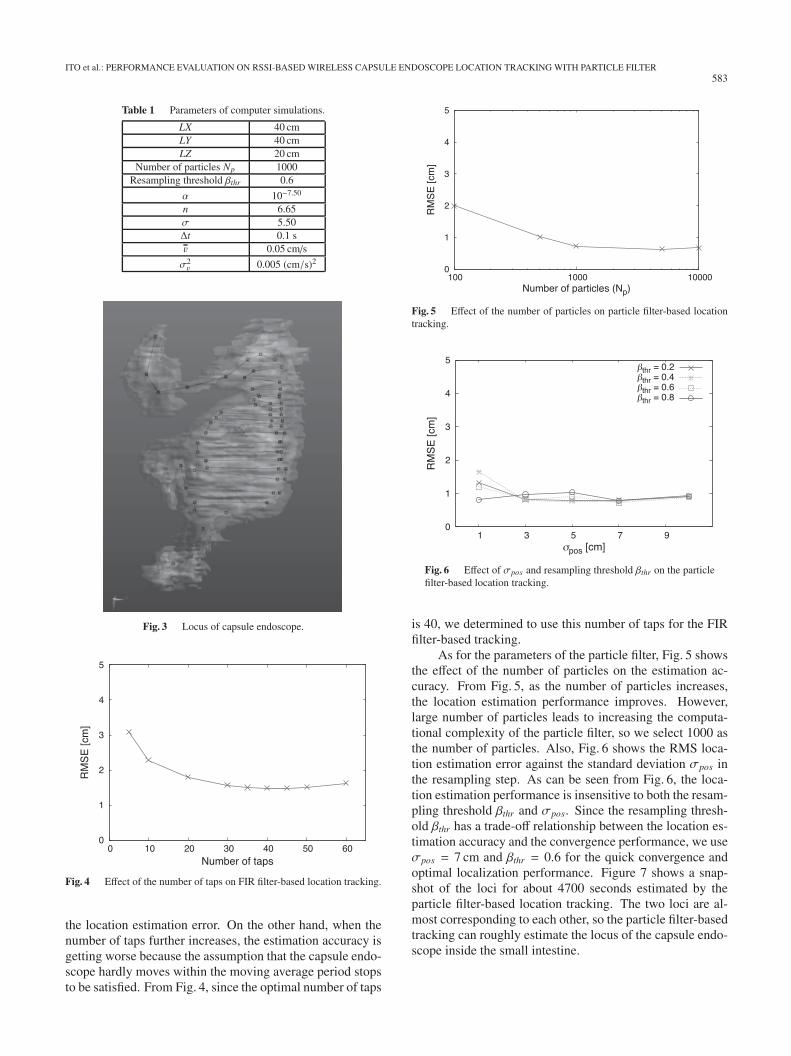
Let us discuss the effect of the parameters of the two filterson the localization performances before comparing the esti-mation accuracies between the two tracking methods. Fig-ure 4 shows the root mean square error (RMSE) for the FIRfilter-based location tracking with the respect to the numberof taps of the FIR filter. We can see from this figure that asthe number of taps increases, the location estimation perfor-mance becomes better. This is because that the use of morepast estimated locations improves the estimation accuracy,that is, averaging more past estimated location can reduce
ITO et al.: PERFORMANCE EVALUATION ON RSSI-BASED WIRELESS CAPSULE ENDOSCOPE LOCATION TRACKING WITH PARTICLE FILTER583
Table 1 Parameters of computer simulations.
LX 40 cmLY 40 cmLZ 20 cm
Number of particles Np 1000Resampling threshold βthr 0.6
α 10−7.50
n 6.65σ 5.50Δt 0.1 sv 0.05 cm/s
σ2v 0.005 (cm/s)2
Fig. 3 Locus of capsule endoscope.
Fig. 4 Effect of the number of taps on FIR filter-based location tracking.
the location estimation error. On the other hand, when thenumber of taps further increases, the estimation accuracy isgetting worse because the assumption that the capsule endo-scope hardly moves within the moving average period stopsto be satisfied. From Fig. 4, since the optimal number of taps
Fig. 5 Effect of the number of particles on particle filter-based locationtracking.
Fig. 6 Effect of σpos and resampling threshold βthr on the particlefilter-based location tracking.
is 40, we determined to use this number of taps for the FIRfilter-based tracking.
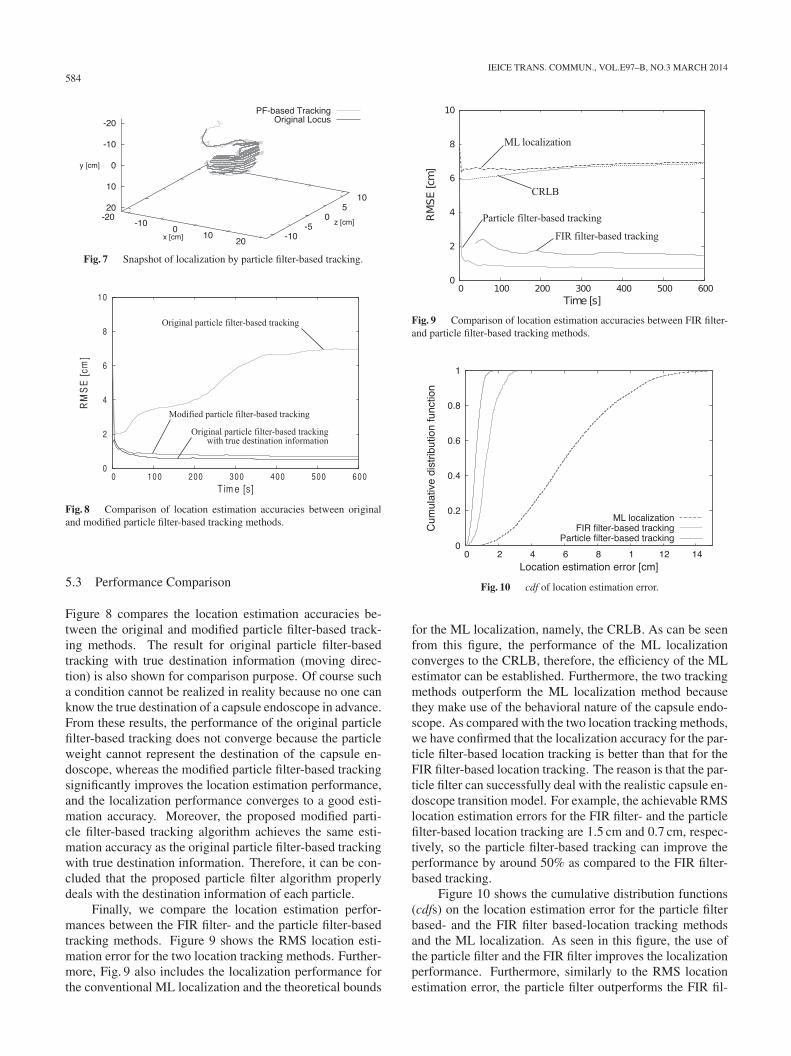
As for the parameters of the particle filter, Fig. 5 showsthe effect of the number of particles on the estimation ac-curacy. From Fig. 5, as the number of particles increases,the location estimation performance improves. However,large number of particles leads to increasing the computa-tional complexity of the particle filter, so we select 1000 asthe number of particles. Also, Fig. 6 shows the RMS loca-tion estimation error against the standard deviation σpos inthe resampling step. As can be seen from Fig. 6, the loca-tion estimation performance is insensitive to both the resam-pling threshold βthr and σpos. Since the resampling thresh-old βthr has a trade-off relationship between the location es-timation accuracy and the convergence performance, we useσpos = 7 cm and βthr = 0.6 for the quick convergence andoptimal localization performance. Figure 7 shows a snap-shot of the loci for about 4700 seconds estimated by theparticle filter-based location tracking. The two loci are al-most corresponding to each other, so the particle filter-basedtracking can roughly estimate the locus of the capsule endo-scope inside the small intestine.
584IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014
Fig. 7 Snapshot of localization by particle filter-based tracking.
Fig. 8 Comparison of location estimation accuracies between originaland modified particle filter-based tracking methods.
5.3 Performance Comparison
Figure 8 compares the location estimation accuracies be-tween the original and modified particle filter-based track-ing methods. The result for original particle filter-basedtracking with true destination information (moving direc-tion) is also shown for comparison purpose. Of course sucha condition cannot be realized in reality because no one canknow the true destination of a capsule endoscope in advance.From these results, the performance of the original particlefilter-based tracking does not converge because the particleweight cannot represent the destination of the capsule en-doscope, whereas the modified particle filter-based trackingsignificantly improves the location estimation performance,and the localization performance converges to a good esti-mation accuracy. Moreover, the proposed modified parti-cle filter-based tracking algorithm achieves the same esti-mation accuracy as the original particle filter-based trackingwith true destination information. Therefore, it can be con-cluded that the proposed particle filter algorithm properlydeals with the destination information of each particle.
Finally, we compare the location estimation perfor-mances between the FIR filter- and the particle filter-basedtracking methods. Figure 9 shows the RMS location esti-mation error for the two location tracking methods. Further-more, Fig. 9 also includes the localization performance forthe conventional ML localization and the theoretical bounds
Fig. 9 Comparison of location estimation accuracies between FIR filter-and particle filter-based tracking methods.
Fig. 10 cdf of location estimation error.
for the ML localization, namely, the CRLB. As can be seenfrom this figure, the performance of the ML localizationconverges to the CRLB, therefore, the efficiency of the MLestimator can be established. Furthermore, the two trackingmethods outperform the ML localization method becausethey make use of the behavioral nature of the capsule endo-scope. As compared with the two location tracking methods,we have confirmed that the localization accuracy for the par-ticle filter-based location tracking is better than that for theFIR filter-based location tracking. The reason is that the par-ticle filter can successfully deal with the realistic capsule en-doscope transition model. For example, the achievable RMSlocation estimation errors for the FIR filter- and the particlefilter-based location tracking are 1.5 cm and 0.7 cm, respec-tively, so the particle filter-based tracking can improve theperformance by around 50% as compared to the FIR filter-based tracking.
Figure 10 shows the cumulative distribution functions(cdfs) on the location estimation error for the particle filterbased- and the FIR filter based-location tracking methodsand the ML localization. As seen in this figure, the use ofthe particle filter and the FIR filter improves the localizationperformance. Furthermore, similarly to the RMS locationestimation error, the particle filter outperforms the FIR fil-

ITO et al.: PERFORMANCE EVALUATION ON RSSI-BASED WIRELESS CAPSULE ENDOSCOPE LOCATION TRACKING WITH PARTICLE FILTER585
ter in term of the cdf on the location estimation error. FromFig. 10, the maximum location estimation error of the par-ticle filter is achieved within 2 cm, whereas that of the FIRfilter is around 2.5 cm, and when the cdf of the location es-timation error is 0.7, the particle filter-based tracking im-proves the estimation performance by around 50% as com-pared to the FIR filter-based tracking. One reason for such agood performance may be attributed to that the WCE movesquite slowly in the GI tract. This makes more RSSI data beobserved and the particle filter be more valid in estimatingthe WCE location.
6. Conclusions
This paper has introduced the FIR filter and the particle filterinto the RSSI-based localization for wireless capsule endo-scope tracking. In order to successfully apply the particlefilter to the capsule endoscope tracking problem, we havemodified the resampling step in the particle filter algorithmbecause the transition model has some parameters that can-not be estimated by received wireless signal. Furthermore,this study has not only introduced the particle filter into thecapsule endoscope tracing but also revealed the problem ofthe original particle filter and solved the problem by usinga simple but effective modification in the resampling step.Our computer simulation results have demonstrated that themodified particle filter-based tracking outperforms the con-ventional FIR filter-based tracking by introducing a realisticcapsule endoscope transition model. As a result, our loca-tion tracking method offers the high estimation accuracy of0.7 cm.
Our future subject is to compare the particle filter-based tracking with other localization method, such as TOA-based localization and to evaluate the localization accuracyby experiment.
Acknowledgment
This study was supported partially by JSPS KAKENHIGrant Number 24760297 and JST Adaptable and SeamlessTechnology transfer Program (A-STEP).
References
[1] H.B. Li and R. Kohno, “Body area network and its standardizationat IEEE 802.15. BAN,” Advances in Mobile and Wireless Commu-nications, pp.223–238, Springer, 2008.
[2] E. Monton, J.F. Hernandez, J.M. Blasco, T. Herve, J. Micallef, I.Grech, A. Brincat, and V. Traver, “Body area network for wirelesspatient monitoring,” IET Commun., vol.2, no.2, pp.215–222, Feb.2008.
[3] J. Wang and Q. Wang, Body Area Communications, Wiley-IEEE,2013.
[4] K. Arshak and F. Adepoju, “Capsule tracking in the GI tract: A novelmicrocontroller based solution,” Proc. IEEE Sensors ApplicationsSymposium, 2006, pp.186–191, 2006.
[5] M. Kawasaki and R. Kohno, “A TOA based positioning technipueof medical implanted devices,” Third International Symposium onMedical Information & Communication Technology, ISMICT09,
Monteral, 2009.[6] X. Wang, M. Meng, and C. Hu, “A localizatio method using 3-axis
magnetoresistive sensors for tracking of capsule endoscope,” Proc.IEEE/EMBS, pp.2522–2525, Soul, 2006.
[7] C. Hu, M. Meng, and M. Mandal, “The calibration of 3-axis mag-netic sensor array system for tracking wireless capsule endoscope,”IEEE/RSJ International Conference on Robots and Systems, 2006,pp.162–167, 2006.
[8] J. Bulat, K. Duda, M. Duplaga, R. Fraczek, A. Skalski, M. Socha,P. Turcza, and T. Zielinski, “Data processing tasks in wireless GIendoscopy: Image-based capsule localization and navigation withvideo compression,” Proc. IEEE/EMBS, 2007, pp.2815–2818, 2007.
[9] R. Kuth, J. Reinschke, and R. Rockelein, “Method for determiningthe position and orientation of an endoscopy capsule guided throughan examination object by using a navigating magnetic field gener-ated by means of a navigation device,” Patent US2007/0 038 063,Feb. 2007.
[10] M. Kawasaki and R. Kohno, “Position estimation method of medicalimplanted devices using estimation of propagation velocity insidehuman body,” IEICE Trans. Commun., vol.E92-B, no.2, pp.403–409, Feb. 2009.
[11] N.B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The cricketlocation-support system,” Proc. ACM MOBICOM, pp.112–121,Aug. 2000.
[12] D. Niculescu and B. Nath, “Ad hoc positioning system (APS) us-ing AOA,” Proc. IEEE INFOCOM 2003, vol.3, pp.1734–1743, April2003.
[13] A. Hac, Wireless Sensor Network Designs, Wiley, 2003.[14] M. Fischer, R. Schreiber, D. Levi, and R. Eliakim, “Capsule en-
doscopy: The localization system,” Gastrointestinal endoscopy clin-ics of north america, vol.14, pp.25–31, 2004.
[15] D. Anzai and S. Hara, “A simple outlier data rejection algorithm foran RSSI-based ML location estimation in wireless sensor networks,”Proc. IEEE VTC 2008-Fall, pp.1–5, Sept. 2008.
[16] R. Zemek, D. Anzai, S. Hara, K. Yanagihara, and K. Kitayama,“RSSI-based localization without a prior knowledge of channelmodel parameters,” Int. J. Wireless Information Networks, vol.15,no.3-4, pp.128–136, Oct. 2008.
[17] D. Anzai, S. Aoyama, and J. Wang, “Performance evaluationon RSSI-based localization for capsule endoscopy systems with400 MHz MICS band signals,” IEICE Trans. Commun., vol.E95-B,no.10, pp.3081–3087, Oct. 2012.
[18] R.B. Noland, W.Y. Ochieng, and M. Quddus, “An extended Kalmanfilter algorithm for integrating GPS and low cost dead reckoning sys-tem data for vehicle performance and emissions monitoring,” J. Nav-igation, vol.56, no.2, pp.257–275, 2003.
[19] F.A. Faruqi and K.J. Turner, “Extended Kalman filter synthesisfor integrated global positioning/inertial navigation systems,” Appl.Math. Comput., vol.115, no.2-3, pp.213–227, 2000.
[20] B. Ristic, S. Arulampalam, and N. Gordon, Beyond the Kalman Fil-ter — Particle filters for tracking applications, Artech House, 2004.
[21] M.S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorialon particle filters for online nonliner/nongaussian bayesian track-ing,” IEEE Trans. Signal Process., vol.50, pp.174–188, Feb. 2002.
[22] B. Moussakhani, R. Chavez-Santiago, and I. Balasingham, “Multimodel tracking for localization in wireless capsule endoscopes,” IS-ABEL’11 Proceedings of the 4th International Symposium on Ap-plied Sciences in Biomedical and Communication Technologies, Ar-ticle no.159, 2011.
[23] H.L. Van Trees, Detection, Estimation, and Modulation Theory: PartI, Wiley, 1968.
[24] A. Doucet and A.M. Johansen, “A tutorial on particle filtering andsmoothing: Fifteen years later,” In Oxford Handbook of NonlinearFiltering, D. Crisan and B. Rozovsky, eds., Oxford UniversityPress,2009.
586IEICE TRANS. COMMUN., VOL.E97–B, NO.3 MARCH 2014
Takahiro Ito was born in Aichi, Japan,in 1990. He received the B.Eng. degree fromNagoya Institute of Technology, Aichi, Japanin 2013. He is currently pursuing the M.Eng.course at Nagoya Institute of Technology, en-gaging in the research on localization in bodyarea networks.
Daisuke Anzai received the B.E., M.E.and Ph.D. degrees from Osaka City University,Osaka, Japan in 2006, 2008 and 2011, respec-tively. Since April 2011, he has been an As-sistant Professor at the Graduate School of En-gineering, Nagoya Institute of Technology, Na-goya, Japan. He has engaged in the research ofbiomedical communication systems and local-ization systems in wireless communication net-works.
Jianqing Wang received the B.E. degreein electronic engineering from Beijing Instituteof Technology, Beijing, China, in 1984, and theM.E. and D.E. degrees in electrical and commu-nication engineering from Tohoku University,Sendai, Japan, in 1988 and 1991, respectively.He was a Research Associate at Tohoku Univer-sity and a Senior Engineer at Sophia SystemsCo., Ltd., prior to joining the Nagoya Institute ofTechnology, Nagoya, Japan, in 1997, where heis currently a Professor. His research interests
include biomedical communications and electromagnetic compatibility.
Related Documents










