Perceptually Motivated Automatic Dance Motion Generation for Music By Jae Woo Kim B.S. in Physics, February 1991, Hankuk University of Foreign Studies M.S. in Computer Science, February 1993, Hankuk University of Foreign Studies A Dissertation Submitted to the Faculty of The School of Engineering and Applied Science of the George Washington University in partial satisfaction of the requirements for the degree of Doctor of Science May 17, 2009 Dissertation directed by James K. Hahn Professor of Computer Science

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Perceptually Motivated Automatic Dance Motion Generation for
Music
By Jae Woo Kim
B.S. in Physics, February 1991, Hankuk University of Foreign Studies
M.S. in Computer Science, February 1993, Hankuk University of Foreign Studies
A Dissertation Submitted to
the Faculty of The School of Engineering and Applied Science
of the George Washington University in partial satisfaction of the requirements
for the degree of Doctor of Science
May 17, 2009
Dissertation directed by
James K. Hahn
Professor of Computer Science

UMI Number: 3349630
INFORMATION TO USERS
The quality of this reproduction is dependent upon the quality of the copy
submitted. Broken or indistinct print, colored or poor quality illustrations and
photographs, print bleed-through, substandard margins, and improper
alignment can adversely affect reproduction.
In the unlikely event that the author did not send a complete manuscript
and there are missing pages, these will be noted. Also, if unauthorized
copyright material had to be removed, a note will indicate the deletion.
______________________________________________________________
UMI Microform 3349630 Copyright 2009 by ProQuest LLC
All rights reserved. This microform edition is protected against unauthorized copying under Title 17, United States Code.
_______________________________________________________________
ProQuest LLC 789 East Eisenhower Parkway
P.O. Box 1346 Ann Arbor, MI 48106-1346

ii
The School of Engineering and Applied Science of The George Washington University
certifies that Jae Woo Kim has passed the Final Examination for the degree of Doctor of
Science as of December 2, 2008. This is the final and approved form of the dissertation.
Perceptually Motivated Automatic Dance Motion Generation for
Music
Jae Woo Kim
Dissertation Research Committee:
James K. Hahn, Professor of Computer Science, Dissertation Director
Simon Y. Berkovich, Professor of Computer Science, Committee Member
John L. Sibert, Professor of Computer Science, Committee Member
Shmuel Rotenstrich, Associate Professor of Computer Science, Committee Member
Hesham Fouad, President of VRSonic Inc., Committee Member

iii
ABSTRACT
Perceptually Motivated Automatic Dance Motion Generation for Music
In this paper, we describe a novel method to automatically generate synchronized
dance motion that is perceptually matched to a given musical piece. The proposed
method extracts thirty musical features from musical data as well as thirty seven motion
features from motion data. A matching process is then performed between the two feature
spaces considering the correspondence of the relative changes in both feature spaces and
the correlations between musical and motion features.
Similarity matrices are introduced to match the amount of relative changes in both
feature spaces and correlation coefficients are used to establish the correlations between
musical features and motion features by measuring the strength of correlation between
each pair of the musical and motion features. By doing this, the progressions of musical
and dance motion patterns and perceptual changes between two consecutive musical and
motion segments are matched.
To demonstrate the effectiveness of the proposed approach, we designed and
carried out a user opinion study to assess the perceived quality of the proposed approach.
The statistical analysis of the user study results showed that the proposed approach
generated results that were significantly better than those produced using a random walk
through the dance motion database.
The approach suggested in this dissertation can be applied to a number of
application areas including film, TV commercials, virtual reality applications, computer
games and entertainment systems.

iv
Table of Contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .vi
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .vii
Chapter 1 – Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Problem Domain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Proposed Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Original Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Document Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Chapter 2 – Related Work. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Human Motion Synthesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Music Visualization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Speech Animation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Synchronization between Music and Dance Motion . . . . . . . . . . . . . . . . . . . . . 14
2.4.1 Event-Based Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4.2 Feature-Based Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.3 Emotion-Based Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.4 Limitations of Previous Approaches . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Chapter 3 – Dance Performance Generation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1 Solution Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23

v
3.2 Music Analysis. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.1 Rhythm Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.2 Pitch Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.3 Timbre Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.4 Musical Feature Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Motion Analysis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.1 Dynamic Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.2 Postural Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.3 Motion Feature Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3.4 Motion Graph Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4 Dance Motion Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4.1 Matching Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 40
3.4.2 Matching the Progressions of Patterns in Music and Motion . . . . . . . . . 44
3.4.3 Correlation between Musical and Motion Features . . . . . . . . . . . . . . . . . 46
3.4.4 Dance Motion Generation System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Chapter 4 – User Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2 Methods. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4 Discussion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Chapter 5 – Conclusions and Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64

vi
List of Figures
1.1 Problem Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Solution Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.1 Work Flow of Dance Motion Generation System . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Virtual Human Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 Calculation of Dynamic Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Calculation of Arm Shape Motion Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.5 Calculation of Balance Motion Feature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.6 Motion Graph for Human Dance Motion Generation . . . . . . . . . . . . . . . . . . . . . . . . 40
3.7 Similarity Matrix and Matching Progressions of Patterns . . . . . . . . . . . . . . . . . . . . . 46
3.8 Matching between Musical Intensity and Motion Intensity . . . . . . . . . . . . . . . . . . . 47
3.9 System Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1 Questions used in the User Opinion Study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57

vii
List of Tables
1.1 Relevant Research Areas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Musical Features for Rhythm Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Musical Features for Pitch Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Spectral Shape Features and Other Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Musical Feature Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4 Motion Feature Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5 Statistical Analysis of the Results for Prediction 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.6 Statistical Analysis of the Results for Prediction 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.7 Statistical Analysis of the Results for Prediction 3 . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.8 Statistical Analysis of the Results for Prediction 4 . . . . . . . . . . . . . . . . . . . . . . . . . . 59

1
Chapter 1 -- Introduction
The goal of the research is to develop a method to generate a dance performance that
is perceptually matched to a given musical piece. The proposed method extracts musical
features by analyzing input audio streams while also extracting motion features from
motion data. A mapping is then performed between the two feature spaces by matching
the progressions of musical patterns and dance motion patterns and correlating the feature
values between the two. Finally, the input music is automatically transformed into a
dance performance through a process of dance motion recombination based on the
derived mapping. The process results in the generation of “natural” or realistic dance
motion that approximates a human performance for a given musical piece.
1.1 Motivation
Synthesizing realistic human motion is one of the most important research topics in
computer animation. Various methods such as keyframing, inverse kinematics, and
dynamic simulation have been used to synthesize human behavior. More recently, with
the advent of motion capture technology, motion capture and editing techniques have
become widely used in realistic human motion synthesis.
On the other hand, synchronization of sound with motion is also a very essential
problem in animation because sound plays an important role in computer animation. The
process of creating computer generated animation usually begins with the creation of a
visual animated sequence, followed by the sound editing process where perceptually
appropriate sound effects are manually added to the animation sequence. The sound

2
design process is tedious, time consuming, and requires a high level expertise to produce
convincing results. Automatic sound effects synchronization has therefore been a crucial
issue within the computer animation research community as well as industry.
When dealing with music and human dance motion, the synchronization between
music and motion becomes even more important because dance motion has a much
stronger linkage to music than any other type of motion. However, synchronizing music
to dance motion is a very difficult problem due to the intricate relationship that exists
between music and motion in a dance performance. To date, little research has been done
on the problem of synchronization between dance motion and music [CAR02].
The synchronization problem is further compounded due to the complexity inherent
in both musical and human motion data. Musical sound contains a wealth of information
such as pitch, timbre, rhythm and harmony. Human motion data, on the other hand, is
multidimensional and of all human motion (i.e. walking, jumping, running); human dance
motion is the most complex. This complexity makes it difficult to analyze the data and to
explore the relationship between the musical and dance motion features.
The nature how dance is created and performed also creates additional challenges.
Dance performance is carefully choreographed by expert choreographers based on a
given musical piece. This process requires a high degree of intelligence and requires
much expertise, education and experience. This problem is therefore not amenable to the
use of analytic or algorithmic models because of the aesthetic, perceptual, and
psychological aspects that are involved in this process.

sy
th
d
co
d
re
pr
d
nu
In this
ynchronized
he resulting
issertation c
ommercials,
1.2 Pro
The goal
ance motion
esulting in a
rocess wher
ance perform
The prob
umber of res
dissertation,
d dance moti
g dance pe
can be app
, virtual reali
oblem Dom
of this diss
n generation
an animated
re a musical
mance (figur
blem addres
search areas
, we devel
ion that is pe
erformance
plied to a
ity applicatio
main
sertation is
n where an
d dance perf
l piece is au
re 1.1).
Figure
ssed by this
(table 1.1).
3
lop a nov
erceptually m
is convinci
number of
ons, comput
to develop
arbitrary pi
formance. T
uditioned an
1.1: Problem
s work is i
el method
matched to a
ing. The a
application
ter games an
a solution t
ece of musi
This approac
nd analyzed
m definition
inherently m
to automa
a given mus
approach su
n areas incl
nd entertainm
to the probl
ic is an inp
h mimics a
to inspire t
multidisciplin
atically gen
ical piece so
uggested in
luding film,
ment systems
lem of autom
put into a sy
choreograp
the creation
nary spanni
nerate
o that
this
, TV
s.
matic
ystem
pher’s
n of a
ing a

4
Table 1.1: Relevant Research Areas
Research Area Relevance
Motion synthesis Generating human figure animation from given musical cues
Music visualization Rendering a given musical performance using visual constructs
Motion graph search problem Searching an sequence of motion that perceptually matched to a given musical piece from a motion graph constructed by solely human dance motion segments
Motion retrieval problem Retrieving a motion clip that matches to the input musical cues
Music analysis and motion analysis problem
Extracting music and motion features which best describe the properties of music and motion which are useful in matching music to motion
1.3 Proposed Solution
The proposed solution to the problem of dance motion generation consists of four
components – 1) music analysis, 2) motion analysis, 3) motion graph construction, and 4)
matching between musical and motion features. Musical features as well as motion
features are extracted from input music and a database of dance motion clips. Feature
vectors are then constructed from the extracted feature values. Musical features represent
the properties of the musical segments contained in the input music. Motion features
represent the postural and dynamic properties of the motion segments in motion
sequences. A matching process between musical features and motion features is
performed to create a perceptually matched dance performance for the given music
through a process of dance motion recombination; figure 1.2 depicts an overview of the

5
approach. The problem can be formulated as a search problem where a motion database
is searched for a perceptually optimal sequence of motion segments that can be
recombined into a dance performance based on an input musical piece.
Figure 1.2: Solution Overview
Both music and dance performances can be considered to be sequences composed of
a finite number of patterns. Musical performances generally consist of a set of patterns or
themes that repeat throughout the musical piece. Similarly a progression of patterns or
themes exists in a dance performance. Current approaches to this problem have only
considered the local properties of musical and motion segments in finding an optimal
match. The global or thematic structures of the musical performance and reconstructed
dance motion are ignored. Consequently, dance motion produced using current
approaches are not convincing.
In this dissertation, we propose a novel approach using a motion-to-music matching
method that extracts thirty musical features from musical data as well as thirty seven
motion features from motion data. A matching process is then performed between the two
feature spaces considering the correspondence of the relative changes in both feature
spaces and the correlations between musical and motion features. Similarity matrices are
Motion Database
Music Data (.wav or .mp3)
Motion Analysis Music Analysis
Motion FeaturesMatching Musical Features

6
introduced to match the amount of relative changes in both feature spaces and correlation
coefficients are used to establish the correlations between musical features and motion
features by measuring the strength of correlation between each pair of the musical and
motion features. By doing this, the progressions of musical and dance motion patterns
and perceptual changes between two consecutive musical and motion segments are
matched.
To demonstrate the effectiveness of the proposed approach, some measure of
perceived quality will have to be developed. Evaluating the perceived quality of an
animated dance performance using an analytic or algorithmic solution, however, is not
feasible due to the complexity of articulated human figure animation as well as the
perceptual, psychological, and aesthetic aspects that contribute to the perceived quality of
the generated dance performance. We therefore designed and carried out a user opinion
study to assess the perceived quality of the proposed approach.
1.4 Original Contributions
This dissertation will make several original contributions in the area of human figure
animation:
• A novel approach has been developed to address the problem of automatic dance
motion generation using a thematic analysis of music and dance motion.
• The perceptual relationship between musical and motion features has been
explored and established to match musical contents and motion contents.

7
• A set of motion features which are useful in describing the postural and dynamic
properties of human motion has been developed. The motion features developed in
this research are not only useful for motion to music matching but also useful for
many other applications such as motion analysis and motion retrieval.
• The proposed approach can be used in a number of application areas requiring
perceptually optimal mapping between two different media types. Examples of this
include abstract animation, movie clip generation, textures generation from
musical data or automatic music or sound effects generation from motion data.
1.5 Document Organization
The remainder of this document is organized as follows: Chapter 2 reviews previous
work in the various related domains including music-to-motion matching, human motion
synthesis, music visualization, and speech animation. Chapter 3 describes, in detail, the
approach proposed in this dissertation. Chapter 4 discusses about user opinion study of
the proposed approach in motion-to-music synchronization. Chapter 5 concludes the
dissertation and discusses future work.

8
Chapter 2 -- Related Work
In this chapter, we review previous work related to this dissertation. The related
research areas are divided into the following four categories: 1) human motion synthesis,
2) music visualization, 3) speech animation, and 4) dance motion generation from music.
Major issues regarding previous approaches in each area are described along with the
advantages and limitations of each approach.
2.1 Human Motion Synthesis
Human motion synthesis or articulated figure animation has been an important topic
in computer animation research. It has many application areas and much research has
been performed on creating animation of human behaviors. Some research efforts have
focused on the appearance of the generated human motion while others focused on the
physical correctness of the movements of human body depending on the application area
or requirements of the problem. Research in human motion synthesis can be divided into
several categories – keyframing, inverse kinematics, and dynamic simulation – in terms
of the solution methods used in generating animation.
Keyframing approaches have been widely used in classical animation. Animators
specify the keyframes of the animation and the in-between frames are generated
automatically using interpolation methods. The merit of this approach lies in that it gives
the animators full control over the human characters’ movements. However, this
approach requires much time and effort as well as a high degree of expertise. The inverse
kinematics approach allows animators to specify only the positions of end-effectors, such

9
as hands and feet, and all the joint angles are automatically obtained by applying the
inverse kinematics method to define the pose of each frame in the animation sequence.
Additional constraints can be defined to address the problem of ambiguity which
frequently occurs when using this approach. The problem of ambiguity can be solved by
optimization methods using the given constraints. Inverse kinematics approaches require
less time and effort compared to the keyframing approache. [CHU99] It is nonetheless a
tedious and time-consuming procedure. Finally, dynamic simulation approaches calculate
dynamic constraint formulations to automatically produce physically correct motion.
While this approach is the least labor intensive, it is very difficult to specify the necessary
constraints to produce a desired motion and the computational cost of this approach is
very high[HOD95][HOD97].
Since the advent of the motion capture technology, approaches using motion capture
data in human motion synthesis have been widely used in generating realistic human
motion. Human body movements generated using this approach is highly realistic
because the motion capture data is captured from real human actors’ movements
[BOD97][MOL96][OBR00]. Motion capture data can be reused by modifying the
captured motion data using various techniques such as signal processing, space-time
constraints, and displacement mapping. Motion editing techniques modify the motion
capture data to meet user-specified requirements or environmental constraints while
keeping the original quality of the motion [BRU95][WIT95][GLE97] [GLE98]. Motion
graphs have been used to generate new sequences of motion by stitching many small
clips of motion data according to the specifications and constraints given by users and the
environment. User specifications can be given as a set of key character poses, a path

10
traveled by the character, or as a reference motion specified by the user and captured by a
video camera. [ARI02][KOV02][Lee02][LI02].
While a variety of approaches have been developed for the specification of desired
motion in human motion synthesis systems, little work has been done on the generation
human motion from the musical cues extracted from a musical performance
[SHI06a][SHI06b].
2.2 Music Visualization
Music visualization is the process of rendering music graphically by analyzing and
visually mapping the properties of the musical sound. Music visualization can be grouped
into two categories: one is visualization for analysis of musical contents and the other is
visualization for artistic expression.
There are two approaches in visualizing musical content for analysis purposes, one is
visualizing direct musical data and the other is visualizing interpreted musical data. Here,
direct musical data refers to information extracted directly from the musical data such as
pitch or onset time. Interpreted musical data, on the other hand, denotes higher level
information extracted from musical sound such as tempo or key. Misra et al. developed
methods of direct music visualization in which they displayed 2D waveforms or
spectrograms where the x-axis represented time and y-axis represented the primary
values of interest [MIS05]. Interpreted music visualization renders static or animated
imagery to represent structural characteristics, tonal contexts, tempo and loudness
variations of the given musical data. Researchers have used a number of approaches in

11
order to represent the interpreted music including: a 2D grid, a sequence of translucent
arches, toroid representation and moving dots [COO01].
Approaches for music visualization for artistic expression establish a mapping
between musical and visual content and, in some cases, enables interactivity between a
musician and the generated visualization. In these approaches, music is visualized
through responsive video imagery, virtual character behavior, and responsive virtual
environments. Ox developed a system that allows users to navigate virtual landscapes
generated by assigning geometric and color data to characteristics found within input
musical streams [OX02]. Oliver et al. developed a virtual environment containing both
real and abstract elements where user vocalizations result in both auditory and visual
feedback [OLI97]. Leven and Lieberman developed a system which generates glyphs to
augment live performer’s vocalizations [LEV04]. Wayne Lytle developed a number of
three dimensional animations based on MIDI events. In his work, MIDI data controls and
animates preposterous-looking instruments to produce pleasing movements to every
sound generated from the MIDI data [LYT].
Various commercial media players such as Winamp, Microsoft media player, Real
Player have the ability to generate animated imagery based on a piece of recorded music.
They visualize music based on basic musical features such as loudness and frequency
content.
The problem addressed by this dissertation can be viewed as an approach to music
visualization using human character dance performance. In this regard, the proposed
approach is closely related the problem of music visualization for artistic expression.
12
However, as we discussed in this section, much of the research efforts to date have been
focused on the problem of music visualization for analysis of musical content while the
problem of visualization for artistic expression has not been very well studied.
Unfortunately, due to the complexity of the problem, current approaches in music
visualization are not applicable to the problem of automatic dance performance
generation from music. The information extracted from musical performance for the
purpose of musical analysis or artistic visualization is not sufficient for the problem of
dance motion generation. Current approaches generally extract a small number of musical
features for the purposes of visualization. Global or structural information regarding the
musical composition is not extracted. Therefore, current approaches do not provide
sufficient information for the generation of realistic dance performance.
2.3 Speech Animation
Synchronizing the lip movement of an animated character with speech is an important
topic in human facial animation. This problem is comparable with the motion-to-music
matching problem because both problems deal with the process of generating animation
for the given audio signals. Research efforts on the synchronization of lip movement with
speech are concerned with several issues: (1) how to represent the facial model, (2) how
to control the facial model, (3) how to label vesemes or the visual configurations, and (4)
how to generate the motion sequence [COH93][BRE97].
Generic 3D mesh models, 3D scans, real images, or hand-drawn images have been
used as human facial models in this area [PAR72][LEW91][GUI94][MOR91]. The

13
control parameters are defined depending on the facial models used. Examples of control
parameters are three dimensional deformations or the labels attributed to specific facial
locations. Target utterances are matched with corresponding phoneme labels with which
associated visual configurations have been assigned. Those associated visual
configurations are used to generate the animated images in the synthesis phase. The
phoneme labels can be assigned manually or automatically.
Keyframing methods and physics-based methods have been used in synchronizing lip
movement with speech and more recently machine learning methods have been used as
well. With keyframing methods, the animator specifies particular key-frames and the
systems generate intermediate frames to generate animated images
[PAR74][PEA86][COH90]. With physics-based methods, physically based models are
used to determine the mouth movement for given initial condition and the set of forces
acting on the facial model. To do this the facial model must include a representation of
the underlying facial muscles and skin [WAT87][LEE95]. In machine learning methods,
systems are trained from recorded and labeled data and then used to synthesize new
motions [BRA99][BRO94].
The approaches used in speech animation are not directly applicable to the problem of
dance motion generation because the objectives of the two problems are different. The
objective of speech animation is to generate correct mouth movement that can realize the
appropriate phonemic targets, while objective of dance motion generation is to generate
perceptually matched dance movements that are aesthetically satisfying. The phonemic
labeling approach that uses predefined visual configurations for each phoneme used in
14
speech animation systems is not applicable to dance motion generation because for a
given set of musical data can have multiple visual configurations that are perceptually
well matched.
2.4 Synchronization between Music and Motion
There have been some recent efforts addressing the problem of music to motion
synchronization. Those efforts are focused on establishing a correlation between musical
and motion features that represent the perceptual properties of music and motion
respectively. Those efforts have addressed the problem using two approaches – one is the
mapping of music to motion, and the other is mapping motion to music. Each of these
approaches is applicable to different application areas. Whatever the approach, the
essence of the problem, however, is the same.
Musical features that have been used in this research include both MIDI (Musical
Instrument Digital Interface) data as well as audio signal data. MIDI is a standardized
protocol for communication between electronic music devices as well as between those
devices and host computers. MIDI data contains information on event messages such as
the pitch and intensity of musical notes, control signals for sound generation parameters
such as volume, vibrato and panning, as well as clock signals to set the tempo. Because
MIDI data already contains much information about the music while audio signal data
does not, it is generally easier to extract musical features from MIDI data. Much of the
music to motion synchronization research has therefore utilized MIDI data as input due to
its simplicity. Most music, however, is not stored as MIDI data, but as either an analog or

15
digital signal. This limits the usefulness of approaches based on MIDI data. Approaches
using audio signal data are much more widely applicable.
We can divide research efforts in music to motion synchronization into the following
three categories: 1) Event-based matching, 2) Feature-based matching, and 3) Emotion-
based matching. In this section, we investigate these approaches and discuss their
strengths and limitations.
2.4.1 Event-Based Matching
Motion and music can be synchronized by matching events extracted from musical
data with events extracted from motion data. An event in the musical domain is defined
as a point in the time domain where a certain significant perceptual change occurs.
Events in the musical domain include: dominant drum beats, peak points in amplitude
while events in the motion domain include: motion beats, footsteps, arm swings, sudden
pauses, and jumps [ALA05][KIM03][LEE05][SAU07].
Sauer and Yang suggested a system for creating an animation that is synchronized to
input music by matching musical events such as beat positions and dynamics (e.g., peaks
and valleys of amplitude) with predefined actions. They developed a script language as
well that is used to define the mapping from musical events to motion events. The users
can easily define the mapping by editing a script file [SAU07].
Although their script allows users the flexibility to define a mapping scheme, their
system has several limitations. First, the variety of movements their system can generate
is limited by a small number of predefined movements. Second, the dance performance

16
does not look realistic because it is generated by a combination of several simple actions.
Lastly, matching is not desirable because it is done manually ignoring the correlation
between music and dance.
Kim et al. suggested an approach for synthesizing synchronized motion from a set of
motion clips using an event matching approach for synchronization. In their approach,
new motion is synthesized by traversing a movement transition graph that is constructed
based on basic movements and acceptable transitions between them. Here, motion
capture data is segmented into small units of motion or basic movements based on motion
beat information extracted from the motion data [KIM03].
In order to synchronize motion to music, musical beats as well as motion beats are
first extracted followed by an incremental time-warping process that aligns the motion
beats and the musical beats so that the synthesized motion is synchronized to the input
sound. While this approach has demonstrated promising results for some classes of
periodic motion, its does not perform well in generating novel choreography. This is due
to the lack of sufficient musical and motion features that are used in synchronizing
motion with music.
Alankus et al. suggested an approach for synthesizing dance motion utilizing a
database of dance motion clips. In this approach new dance motion is synthesized
through a beat matching process where motion clips of dance moves are recombined in
order to match musical beats that are extracted from input music. Distinct dance moves
are delineated by a motion frame where a significant change in the direction of the
movement of some body part occurs.

17
In this approach, dance motion is synthesized by traversing a transition graph
consisting of dance motion segments – called dance figures – and acceptable transitions
between them. A matching algorithm traverses the transition graph using two different
algorithms – a fast greedy method and a genetic algorithm. The motion segments are time
warped so that they are aligned with musical beats extracted through a music analysis
process [ALA05].
Although this approach generates perceptually matched dance motions, it does not
create desirable results from a choreographic or aesthetic point of view. The small
number of musical and motion features used in this approach does not sufficiently
describe the properties of the music and dance motion.
Lee and Lee suggested an approach to generate background music from an animation
by matching feature points extracted from musical data and the corresponding feature
points extracted from motion data. Their approach is different from the above mentioned
approaches in that it maps an input motion sequence into a corresponding musical piece
[LEE05].
In this approach, an analysis process is carried out to extract feature points from both
music and motion sequences. Examples of feature points from music include: local peak
points of note volume and points where a note is played near a quarter note (or a note
played on the beat). Examples of feature points from motion include: foot falls and the
transition points of arm swings. Scores are assigned to feature points emphasizing the
more important features.

18
Various feature points from each source (music or motion) are merged together to
give an overall representation of the source and then the merged feature points of music
are aligned with the merged feature points of motion by time-scaling the music and time-
warping the motion using a dynamic programming algorithm.
They also suggested a novel data structure – a Music Graph – which is used to
synthesize a music sequence for the given motion data. A Music Graph consists of
musical segments (nodes) and the acceptable transitions among them. Music is generated
by traversing the Music Graph based on the motion features of a given animation.
2.4.2 Feature-Based Matching
Another approach that has been used for music-to-motion synchronization is based on
the features of music and motion. Musical features and motion features are parameters
that describe the perceptual properties of music and motion. Events, on the other hand,
represent the occurrences of some changes of features in time domain. One typical
example of this approach is the matching musical intensity with motion intensity
[DOB03][SHI06a][SHI06b].
Dobrian and Bevilacqua suggested a method of mapping motion to music by dividing
an input motion sequence into small pieces of motion segments. Motion features such as
the time taken to traverse the segment, the total distance traversed over a segment, the
average speed while traveling along a segment, and the curviness of the path, are
extracted from each motion segment. Those features are then transformed into either
MIDI parameters or control parameters for signal processing based on a user specified

19
mapping in order to generate a musical sound track. [DOB03] Although this approach
provides an intuitive and expressive way to generate a musical sound track, it does not
provide a feasible approach for generating dance motion for music due to the manual
mapping process between musical and motion features.
Shiratori et al. suggested a feature based method for synthesizing synchronized dance
motion based on rhythm and intensity of motion and music. The key idea here is that
musical musical rhythm has a strong correlation with motion rhythm while musical
intensity, which represents the musical mood, has a strong correlation with motion
intensity which represents the strength of motion [SHI06a][SHI06b].
Their approach synthesizes a dance performance by searching a motion graph of
dance motion clips to select the best matching motion sequence in terms of rhythm and
intensity. This approach is predicated on the idea that rhythm and intensity provide a
sufficient level of information to generate both choreographically as well as aesthetically
convincing dance motion. However, given the complex and dynamic structure of music
and dance, it is unlikely that rhythm and intensity alone are sufficient for this purpose.
2.4.3 Emotion-based Matching
The psychological responses of audiences while auditioning music and dance
performance are one of the crucial issues in music and motion synchronization research.
Emotional assessment of music and motion gestures has been addressed in the fields of
music psychology, emotional intelligence, and human computer interaction (HCI). There

20
are also research efforts in music and motion synchronization that consider the emotional
responses of audiences to music and human motion [CAR02].
Cardle et al. suggested an approach for imbuing generated human motion with
emotional content based on input music. Their approach extracts musical features from
both MIDI data and the corresponding analog audio rendition to extract perceptually
significant musical features. The musical features are used to guide the motion editing
process to synthesize an animation synchronized with the given music [CAR02].
The animator manually establishes a mapping between musical features and motion
editing filters interactively such that any musical feature can be mapped to any motion
feature. The motion editing techniques used in their system include motion signal
processing, infinite impulse response (IIR) filters, non-linear filters, and stochastic noise
functions that can modify the generated motion to imbue it with a specific (happy, sad,
angry) emotional mood.
Morioka et al. suggested an algorithm of synthesizing music that can appropriately
express emotion in dance. Their algorithm extracts the emotional content from input
dance motion and from a library of musical pieces. Music is then synthesized by selecting
a musical piece which is emotionally best matched for the emotional content extracted
from the dance motion. An eight state emotional space is used that includes: solemn, sad,
tender, serene, light, happy, exhilarated and emphatic emotional states [MOR04].
This approach can achieve convincing, emotionally inspired, mapping between dance
motion and a corresponding musical performance. However, because this approach only

21
considers emotional state while ignoring all other aspects of dance motion and music
(features and events), it is generally not useful for the dance performance generation
problem.
2.4.4 Limitations of Previous Approaches
The research efforts that we investigated in this section have several important
limitations when considering the problem of automatic dance motion generation. They
are as follows:
• Not enough information from music and motion is used in the matching process
The approaches discussed in this section all utilize a limited number of features
extracted from human motion and music. The lack of richness in the feature set used
in those efforts limits the effectiveness of the mapping processes because not enough
information is used and thus the mappings are generally not convincing.
• No unified solution framework has been developed
Each approach focuses on one aspect of the motion to music matching problem. For
example, one approach only considers matching events detected from music and
motion while other approaches consider only matching features or emotional states
of the music and motion data. In order to produce convincing results, all aspects
(events, features, emotion) of motion and music should be considered in a unified
mapping framework.
• Global structure of music and motion are ignored in matching process

22
Music and dance motion sequences consist of several patterns or themes which
change and repeat over the performance. This global structure of music and dance
motion is important and provides critically important information that must be
considered if convincing dance motion is to be generated. Current efforts, however,
focus exclusively on local matching process, ignoring the global structure of the
music and motion.

23
Chapter 3 -- Dance Performance Generation
As we mentioned in Chapter 1, the problem addressed in this dissertation is the
automatic generation of human dance performances based on an arbitrary musical input.
The proposed solution to this problem consists of the following four components:
• Music analysis
• Motion analysis
• Motion graph construction
• Matching between musical contents and motion contents
We will begin with the overview of the proposed solution. Then we will discuss each
component.
3.1 Solution Overview
A musical analysis process as well as a motion analysis process is first carried out to
extract useful information from both the input musical data and a set of dance motion
clips in a motion capture database consisting of a variety of recorded dance motions. The
musical analysis process extracts thirty musical features including beat, pitch and timbre
information. A motion analysis process is then carried out to extract thirty seven motion
features consisting of postural and dynamic features of the motion. Finally, a mapping is
performed between the musical and motion feature sets using a novel mapping algorithm
that will be described below.

o
co
th
an
m
m
p
se
cr
As depict
f human dan
onstructed, m
he correspon
nd a music
musical sign
motion featur
ath whose m
equence of t
riteria descri
MusicV
Music Anal• Musical
Matching A• Matchin• Correla
Figure 3.1
ted in figure
nce motion c
motion featu
nding nodes
analysis pr
al. Finally,
re vectors is
motion featu
the input mu
ibed in sectio
cal Feature Vectors
lysis l Feature Ex
Algorithm ng Progressiting Relative
: Work Flow
3.1, the prop
capture data
ure vectors a
of the graph
rocess obtai
a matching
s performed
ure vector se
usical piece.
on 3.4.1.
Musi(.wav,
M
traction
ons of Pattee Sensations
24
w of Dance M
posed appro
in a pre-pro
are calculate
h. At run tim
ins musical
g process be
by searchin
equence bes
The search
c Data , .mp3)
otion FeatuVectors
rns s
Motion Gene
oach construc
cessing phas
d for each m
me, a musica
feature vec
etween the
ng the motio
st matches t
is performe
ure
M
Mot•••
ration Syste
cts a motion
se. When the
motion segm
al piece is fed
ctors by ana
musical fea
on graph to s
o the music
d based on a
Motion Captur
tion Graph Motion SegmMotion FeaMotion Tran
em
n graph consi
e motion gra
ment and stor
d into the sy
alyzing the
ature vectors
select an op
cal feature v
a set of matc
re Database
Constructiomentation ture Extractnsition
isting
aph is
red in
ystem
input
s and
ptimal
vector
ching
n
tion

25
3.2 Music Analysis
Much research on techniques that extract useful features from sound signals has been
done in the fields of speech signal processing, non-speech sound signal processing, and
musical signal processing. Linear Prediction Coefficients (LPC) and Mel Frequency
Cepstral Coefficients (MFCC) are used in speech synthesis and recognition and they can
also be useful features in representing musical signals [DAV80]. Sound features related
to the spectral shapes such as centroid, rolloff and flux have been used to perform content
based audio classification and retrieval. These features are also useful for representing the
timbre information of musical signals [WOL96]. Research on beat and tempo extraction
for analyzing the rhythmic structure of music also has been done. Beat tracking has been
done by estimating peaks and their strengths using autocorrelation techniques. Tzanetakis
worked on musical feature extraction and genre classification of music. He used thirty
musical features in analysis process to perform genre classification [TZA02]. In this
research, we used a set of musical features defined in Tzanetakis’s work.
The musical analysis process extracts thirty separate features categorized into three
parts: beat, pitch and timbre information. Musical analysis is carried out on each musical
segment. The size of each segment is based on musical beat information where each
segment consists of sixteen beats. To produce a perceptually appropriate mapping
between music and motion, the extracted musical features have to correlate well to the
listener’s perception of the music. We used observational analysis to validate this
correlation.

26
3.2.1 Rhythm Information
Rhythm information such as the estimate of the main beat and its strength, the
regularity of the rhythm, the relation of the main beat to the subbeats, and the relative
strength of subbeats to the main beat are extracted to represent the rhythmic structure of
the music by using a beat detection algorithm. The input musical signal is decomposed
into frequency bands using filters and the signal’s envelope is extracted. Periodicity is
detected based on the extracted envelope using an autocorrelation algorithm. The
dominant peaks of the autocorrelation function correspond to the various periodicities of
the signal’s envelope [TZA02]. These peaks are accumulated over the whole sound
segment into a beat histogram where each bin corresponds to the peak lag. Table 3.1
shows the musical features related with rhythm information.
Table 3.1: Musical Features for Rhythm Information [TZA02]
A0, A1 Relative amplitude (divided by the sum of amplitudes) of the first, and second histogram peak
RA Ratio of the amplitude of the second peak divided by the amplitude of the first peak
P1, P2 Period of the first, second peak in bpm
SUM Overall sum of the histogram (indication of beat strength)
3.2.2 Pitch Information
The procedure for computing pitch information from the input musical data is similar
to that of computing beat information. Both of the procedures are based on an
autocorrelation technique. The difference between the two procedures is that the pitch

27
detection algorithm analyzes shorter time windows that correspond to human pitch
perception. In this effort we use a multiple pitch detection algorithm described in
[TOL00]. In this algorithm, the signal is decomposed into two frequency bands (below
and above 1000 Hz) and amplitude envelopes are extracted for each frequency band. An
enhanced autocorrelation function is then computed so that the effect of integer multiples
of the peak frequencies to multiple pitch detection is reduced [TZA02]. The features
computed to represent pitch content are shown in table 3.2.
Table 3.2: Musical Features for Pitch Information [TZA02]
FA0 Amplitude of maximum peak of the folded histogram. This corresponds to the most dominant pitch class of the song. For tonal music this peak will typically correspond to the tonic or dominant chord. This peak will be higher for songs that do not have many harmonic changes.
UP0 Period of the maximum peak of the unfolded histogram. This corresponds to the octave range of the dominant musical pitch of the song.
FP0 Period of the maximum peak of the folded histogram. This corresponds to the main pitch class of the song.
IPO1 Pitch interval between the two most prominent peaks of the folded histogram. This corresponds to the main tonal interval relation. For pieces with simple harmonic structure this feature will have value 1 or -1 corresponding to fifth or fourth interval (tonic-dominant).
SUM The overall sum of the histogram. This is feature is a measure of the strength of the pitch detection.
3.2.3 Timbre Information
Nineteen musical features which represent perceptual attributes of the musical timbre
of the input musical data are extracted. Those features include spectral shape features
such as spectral centroid, spectral rolloff, spectral flux, and Mel-Frequency Cepstral
Coefficients which are known to be useful in representing musical timbre. RMS and time

28
domain zero crossings are also extracted. Table 3.3 shows descriptions of musical
features for timbre information except for MFCC [TZA02].
Mel-Frequency Cepstral Coefficients (MFCC) have been widely used in speech
recognition systems. It is known that the first five coefficients of MFCC are useful in
representing the characteristics of musical signals. MFCC coefficients are obtained by
grouping and smoothing the FFT bins of the magnitude spectrum according to the
perceptually motivated Mel-frequency scaling. A discrete Cosine Transform is performed
to decorrelate the resulting feature vectors. [TZA02]
Table 3.3: Spectral Shape Features and Other Features [TZA02]
Feature name Description
Spectral centroid A measure of brightness of the musical segment
Spectral rolloff A measure of the amount of signal’s energy which is concentrated in the lower frequencies
Spectral flux A measure of the amount of local spectral change.
RMS A measure of the loudness of a signal
Zero Crossings A measure of the noisiness of the signal
3.2.4 Musical Feature Vector
The analysis described above results in the generation of thirty musical features that
comprise the Musical Feature Vector. Table 3.4 shows all thirty musical features.

29
Table 3.4: Musical Feature Vector [TZA02]
Timbre Beat Pitch
mRMS mCentroid
mFlux mRolloff
vRMS vCentroid
vFlux vRolloff
ZCRs
mMFCC0 mMFCC1 mMFCC2 mMFCC3 mMFCC4 vMFCC0 vMFCC1 vMFCC2 vMFCC3 vMFCC4
A0 A1 RA P1 P2
SUM
FA0 UP0 FP0 IPO1 SUM
3.3 Motion Analysis
The motion analysis process analyzes a motion clip and extracts a set of motion
features which can describe the perceptual properties of the motion resulting in a motion
feature vector. The motion feature vector contains useful information which can be used
in matching the motion with musical features extracted in music analysis component. In
this section, we define each motion feature used in this research and the motion feature
vector.
Rudolf Laban developed the theory, system, and language which are collectively
called Laban Movement Analysis (LMA). LMA is used to understand and describe
human movements. LMA has been widely used by actors, dancers, athletes, and physical
therapists for observing, understanding, and describing all types of human motion. It
describes human motion using four components: body, effort, shape, and space [CHI00].
Although LMA is a good system for describing and recording human movement, it is
difficult to use the LMA system for human motion synthesis because the four categories

30
of LMA system describe the qualitative aspects of a human movement while it is
necessary to specify quantitative parameters to generate human motion. Chi et al. showed
that the shape and effort components of LMA provide valuable parameters that describe
qualitative aspects of movements and they developed a transformation from shape and
effort parameters into quantitative and controllable parameters [CHI00]. In this section
we will define motion features useful in representing the properties of human motion.
The motion features defined in this dissertation consists of postural features and dynamic
features which are conceptually similar to the shape and effort components of LMA.
We chose to use a Hierarchical Translation-Rotation (HTR) format to represent
motion capture data. HTR is a widely used motion capture format consisting of a root
(center of body) position, root orientation and the orientations of all other joint angles in a
hierarchical fashion. While the HTR format is suitable for visualizing motion using
graphics libraries, it is not well suited for performing motion analysis. We therefore
transformed the motion data into a point representation for the purpose of analysis.
A point representation is obtained by simple calculations on the limb lengths and
orientation information obtained from HTR data format. Figure 3.3 shows the human
model and the corresponding point representation. This process transforms the
orientations of each limb into a 3D location in the global Cartesian coordinates of each
joint position.

31
Figure 3.2: Virtual Human Model
3.3.1 Dynamic Features
Dynamic features represent the dynamic properties of the human motion. These
features are conceptually similar to some of the effort components of Laban Movement
Analysis. Dynamic features used in this dissertation include: velocity, acceleration, and
directional change of joint motion. We will explain each dynamic feature below.
Motion velocity
Motion velocity is defined as a linear summation of the velocities of each joint
position. Equation (3.1) depicts the calculation of motion velocity.
∑∑= =
−+=N
j
n
iii jj
1 1||)(x)1(x||ocitymotion_vel (3.1)

32
Figure 3.3: Calculation of Dynamic Features
Here, )( jix represents a position vector of a joint i at frame j and )()1( jj ii xx −+
represents the change of position of joint i at frame j. n is the number of joints and N is
the number of frames. Shiratori et al. used a similar motion feature with this and they call
it motion intensity. They found that motion intensity is perceptually related with music
intensity [SHI06a][SHI06b]. For example, fast motion matches well with fast and light
musical sound and slow motion matches well with calm or heavy mood musical sound.
Motion Acceleration
Like motion velocity, motion acceleration is defined as a linear sum of the
accelerations of each joint position. Acceleration represents the force applied to the joint
angle. For example, dynamic or sudden motion will have result in large acceleration
values while static smooth motion results in low acceleration values. It is expected that
the acceleration dynamics of motion will perceptually correlate well to musical intensity.
)()1( jj ii xx −+
)1( +jix
)( jix
)1( +jix
)( jix
θ
(a) Motion Velocity (b) Motion Velocity

33
High tempo, dynamic music will result in motion with high acceleration values and vice
versa. Motion acceleration is calculated by equation (3.2).
∑∑= =
−+=N
j
n
iii jj
1 1||)(v)1(v||elerationmotion_acc (3.2)
Here, )( jiv represents a velocity of joint i at frame j and obtained by calculating
||)()1(|| jj ii xx −+ .
Directional Change of Motion
Certain motions are simple or linear while others are complicated and consist of many
directional changes. Directional change of motion indicates the degree of directional
changes made by each joint of the human body. Consequently, motion with a high degree
of directional change will have a large high frequency component. Directional change in
motion is a significant feature in dance motion and would normally correlate to properties
of the accompanying musical piece. The directional change of motion is calculated by
equation (3.3).
∑∑= =
−⎟⎟⎠
⎞⎜⎜⎝
⎛+
⋅+=
N
j
n
i ii
ii
jjjj
1 1
1
||)(x||||)1(x||)(x)1(xcosf_motionl_change_odirectiona (3.3)
Here, )( jix and )1( +jix are vectors of two consecutive joint positions in time.
Therefore, directional change of motion is obtained by calculating linear summation of
angles two consecutive vectors make.

34
3.3.2 Postural Features
Postural features represent the properties that describe the shape of the human body
movement. Postural features are conceptually similar to some of shape components of
Laban Movement Analysis. Postural features used in this dissertation are motion span,
motion density, arm shape, footsteps, and balance. In general, the lower body of human
character structure represents locomotion while the upper body represents gestures.
Vertical, horizontal, and sagittal components of arm shape represent the character’s upper
body gesture and footsteps provide information about lower body locomotion. Motion
span, motion density, and balance give useful information about overall shape of motion.
Motion Span
Motion span represents the size of a motion based on the amount of space it spans.
Motion span is calculated by considering how far each joint position travels in a motion
segment. It is approximated by calculating the linear summation of the distance between
each joint position relative to the calculated centroid of all the joint positions for that joint.
Motion span is calculated by equations (3.4) and (3.5):
⎟⎟⎠
⎞⎜⎜⎝
⎛= ∑
=
N
jj
N 1ii )(x1c (3.4)
∑∑= =
−=n
i
N
jj
2 1ii ||c)(x||nMotion_Spa (3.5)
where ci is a vector representing the centroid of all the positions of joint i through the
motion.
Motion Density

35
Motion density represents how dense the motion is. When a joint moves a great deal
in a relatively small region, we define this as dense motion. Conversely, if it moves little
in a relatively large region we define this as sparse motion. Motion density can therefore
be calculated as the ratio of motion intensity over motion span by equation (3.6):
∑∑
∑∑
= =
= =
−
−+== n
i
N
j
n
i
N
j
j
jj
2 1ii
2 1ii
||c)(x||
||)(x)1(x||
n Motion_SpaocityMotion_VelsityMotion_Den (3.6)
Arm Shape
Arm shape features have three components according to the axes of the local
Cartesian coordinate attached to the virtual human body. They are: vertical, horizontal,
and sagittal components. The vertical component describes how much the arms are raised
upward or lowered downward, the horizontal component describes the degree to which
the arms are spread outward or contracted inward in the horizontal plane, and finally the
sagittal component describes the degree to which the arms are extended forward or
backward [CHI00].
The value of each component of the arm shape is obtained by projecting the position
of the end effectors – left hand and right hand – onto each relevant axis of the local
coordinate system. As shown in figure 3.4, the horizontal axis of the local coordinate
system is obtained by drawing a line from the left shoulder position to the right shoulder
position. The horizontal axis is defined as a unit vector h whose direction is aligned with
the line defined with the left and right shoulder positions and the vector h aims outward
from the shoulder position. The sagittal axis is defined with a unit vector s which is

36
obtained by calculating the cross product between the vector h and vector d which
connects a shoulder position to the center of body. In the similar fashion, the cross
product between vector s and vector h defined the unit vector v that represent vertical axis.
Finally, the projections of the end-effectors onto each axis are obtained by calculating the
dot product between the vector from the corresponding shoulder position to the end-
effector position and the unit vector which represent relevant axis.
Figure 3.4: Calculation of Arm Shape Motion Features
Footsteps
Footsteps provide critical information in describing dance motion. The footsteps
feature is defined as the number of steps occurring in a given motion frame. Exuberant
and flamboyant dance motions tend to have frequent steps while austere and restrained
dance motions tend to have less frequent steps. If the vertical position of the foot is less
than a specified threshold and the foot does not change its position for a certain amount
of time, the foot is considered to be in contact with the ground. Therefore, the footsteps
d
hs
v

37
feature is obtained by counting the number of times that the foot comes in contact with
the ground over the motion frame.
Balance
Human body posture can be well balanced and stable or unbalanced and unstable. The
postural feature balance is defined as the degree of stability of the human body posture
and it provides useful information describing the posture of the dancer’s movement. As
shown in figure 3.5, we calculate the projection point of the center of the human body
onto the ground c and the center point of the rectangle defined by the positions of the left
and right heels r. The feature balance is defined as the distance between those two
positions by equation (3.7) [MOR04].
||rc||Balance −= (3.7)
Fig 3.5: Calculation of Balance Motion Feature
Center of the rectangle Projection of the center of body
Distance between the two points

38
3.3.3 Motion Feature Vector
As described in above two subsections, nine dynamic features and twenty eight
postural features are used to describe the properties of dance motion. Statistics such as
mean, variance, and range are used to construct the motion feature vector. Those features
are calculated for each dance motion segment and stored in corresponding graph nodes
when the motion graph is constructed. (Section 3.3.4 explains about motion graph
construction.) Table 3.5 shows the motion feature vector for each motion segment.
3.3.4 Motion graph construction
A motion graph data structure is used for dance motion synthesis in this work. In
most cases, humans dance not by improvising new motion, but by recombining several
dance motions which they already know into a final dance routine [SHI06a] [SHI06b]. It
is therefore possible to use a motion capture database consisting of prerecorded dance
motions to synthesize a dance motion by searching and selecting a perceptually
appropriate dance motion sequence from the database. By doing this, we can generate
realistic, pleasing, and entertaining dance motion that is synchronized to input music.
A motion graph is a directed graph where nodes correspond to motion sequences and
edges represent the transitions between the nodes. The edges are established by creating
the transitions between the nodes which can be successfully connected to each other so
that the motion resulting from following an edge is seamless. Those transitions are
obtained by calculating similarity measures between the poses of the motion sequences at
the boundaries of the motion clips. If we have two motion sequences A and B, the system
assesses the similarity of the poses of the last frame of A and the first frame of B. The

39
continuity measure includes the similarity of the two poses in consideration and also
continuities in velocity and acceleration. We used the method suggested by [KOV02].
Table 3.5: Motion Feature Vector
Postural Features Dynamic Features
mLArmVertical vLArmVertical rLArmVertical
mLArmHorizontal vLArmHorizontal rLArmHorizontal mLArmSagittal vLArmSagittal rLArmSagittal
mRArmVertical vRArmVertical rRArmVertical
mRArmHorizontal vRArmHorizontal rRArmHorizontal mRArmSagittal vRArmSagittal rRArmSagittal
mSpan vSpan rSpan
mDensity vDensity rDensity
mBalance vBalance rBalance
nFootSteps
mVelocity vVelocity rValocity
mAcceleration vAcceleration rAcceleration
mDirectionalChange vDirectionalChange rDirectionalChange
Consequently, any path selected from the motion graph will generate natural,
seamless and realistic human motion. Human motion can therefore be synthesized by
searching for a path within the motion graph that best satisfies a given criteria. The
criteria for searching the path used in this research are based on the degree of matching
between the motion feature vectors and the musical feature vectors.
In this research, the motion graph nodes contain dance motion sequences consisting
of sixteen musical beats. We assume that sixteen musical beats is an appropriate minimal
length that can contain a dance motion. Figure 3.6 shows the motion graph we used in
this research.

th
cr
ex
m
ar
th
p
d
th
3.4 Da
Automati
he optimal m
riteria. In th
xplain the
matching betw
3.4.1
The criter
re based on
hese criteria
erceptually
efined here
he matching
Figure 3.6: M
nce Perfor
c dance mot
motion sequ
his section, w
proposed a
ween dance
Matching
ria for match
n a set of re
a is accomp
well match
will be used
g in an opti
T
Motion Grap
rmance G
tion generati
uence from t
we will desc
approach for
motion and
g Criteria
hing a piece
quirements
plished by
ed pair of m
d to develop
mization pr
Transitions
40
ph for Human
eneration
ion is, in effe
the motion
cribe the ma
r solving th
music featur
of music an
that any res
observing
musical fea
the evaluati
rocess that f
n Dance Mo
fect, a proble
graph which
atching crite
he problem
re vectors.
nd a correspo
sulting matc
the correla
atures and m
ion function
finds the m
Mo
Motion F
otion Genera
em of search
h satisfies a
ria used in t
m of finding
onding piece
ch must sati
ations that e
motion featu
ns which asse
most perceptu
otion Data
Feature Vector
ation
hing and sele
a set of matc
this research
g an approp
e of dance m
isfy. Establis
exist betwe
ures. The cr
ess the quali
ually approp
ecting
ching
h and
priate
motion
shing
een a
riteria
ity of
priate

41
motion sequence for a given piece of music. Our assumptions for each matching criterion
are described below:
Assumption 1: The musical beats and motion beats must be synchronized.
Both music and dance performance contain rhythm and the rhythm of each must
be synchronized to construct natural and seamless dance performance for the
given music.
Assumption 2: There should be a correlation between repeated musical patterns and
corresponding motion patterns.
Music contains repeated patterns and when a specific musical pattern repeats, the
same corresponding pattern of motion which was previously matched to the music
should be repeated. In other words, if a musical pattern ‘A’ at time t1 repeats
again at time t2, then we expect that the motion pattern ‘a’ which was assigned to
music pattern ‘A’ at time t1 repeats at time t2.
Assumption 3: Changes in the auditory sensation of music should produce
corresponding changes in the visual sensation of the generated motion.
Since human perception is especially sensitive to the changes of auditory and
visual sensations especially at the boundaries between two consecutive musical
and motion segments, the difference in auditory sensation at the boundary
between two music segments must be matched to the difference in the visual
sensation between the two motion segments.

42
Assumption 4: There exists a perceptual correlation between musical features and
motion features.
Each music segment must have a perceptual correlation with the motion segment
assigned to it. For example, a high intensity music segment should be assigned a
motion clip which has high motion intensity.
Motion-to-music matching deals with the problem of comparing two instances from
different spaces - musical feature space and motion feature space. If there existed a
standard space that is shared by both of the two instances, the comparison (or match)
would be apparent: we can measure the distance between two points in a single standard
space. We however don’t have such a standard space and we therefore have to compare
the two points in two different spaces. The idea of the suggested approach is that
although the two points under comparison are in different spaces, we can at least match
the relative amount of perceptual changes in auditory and visual sensations. While
musical and motion segments proceed from one segment to another during a performance,
the audience can perceive the changes of auditory and visual stimuli. We assume that the
difference in auditory sensation between two consecutive musical segments must be
matched to the difference in the visual sensation between the corresponding two motion
segments. For example, if there is a drastic change such as calm sound to noisy and
strong sound, it is expected that the corresponding motion segments also change from, for
example, slow and smooth motion to fast and dynamic motion. Otherwise, if there is not
much change in auditory sensation, then not much change in visual sensation is expected.

43
The first criterion can be satisfied by manually segmenting the input musical data and
all the motion clips in the database into segments containing the predefined number of
beats each (sixteen beats are used in this research). In the future, this process can be
automated by using the beat information extracted from the music and motion data. Once
we have beat information, the music and motion beats are aligned by warping the motion
data along the time axis.
The second and third criteria can be covered by matching relative distances among
the musical segments to the relative distances among the corresponding motion segments
in the respective feature vector spaces. This can be carried out by calculating similarity
matrices for both the musical segments and motion segments. Two separate similarity
matrices are built in this process, one is the similarity matrix for musical data which
contains the distance metrics among the musical segments and another is the similarity
matrix for motion data which contains the distance metrics among the motion segments.
The optimal path that we are searching for, therefore, will minimize the difference
between the two similarity matrices. Section 3.4.2 describes this procedure in details.
The last criterion is implemented by using statistical approaches that measure the
correlation between musical features and motion features. Some of the previous research
efforts explored the relationship between a small number of musical and motion features
observing that a correlation existed for those features. The correlation measure used in
this effort is expected to significantly improve previous results due to the abundance of
musical and motion features used in the analysis procedure. A detailed discussion about

44
the suggested method for deriving the relationship between musical features and motion
features is described in section 3.4.3.
3.4.2 Matching the Progression of Patterns in Music and Motion Sequences
We use the similarity matrices to achieve the matching criteria 2 and 3. The similarity
matrix is a matrix which represents the similarities among the segments in music or
motion sequences. As shown in figure 3.5, columns and rows of the similarity matrix
represent the segments and a cell in the matrix represents the similarity between the
corresponding segments. The similarity between the segments is obtained by calculating
the Euclidean distance between the two points of the segments in the feature space. In the
same way, similarity matrices are calculated for both the music segment and motion
sequence to evaluate the degree of matching between the given music data and motion
sequence under consideration. Equation (3.8) shows the calculation of the similarity
between music and motion sequences.
||FF||Similarity1
0,
jk
n
k
ikji −=∑
−
=
(3.8)
The similarity between a segment i and a segment j is obtained by calculating a linear
summation of the Euclidean distances between the feature vector of segment i and the
feature vector of segment j. Here, ikF represents the normalized kth feature value of the
feature vector for the segment i and n is the number of features. The same equation
applies to both the music segment and the motion segment.

45
After obtaining the similarity matrices for both of the music and motion sequences,
we calculate the difference between the two matrices to evaluate the quality of the current
matching. Equation (3.9) shows the calculation of the difference between the similarity
matrices for music and motion sequences. The matching which produces the smallest
difference is determined to be the best match. By doing this, we can select the best
matching motion sequence for a given musical segment satisfying both matching criteria
2 and 3.
∑∑−
=
−
=
−=1
0
1
0,, ||M||Difference
N
i
N
j
motionji
musicji M (3.9)
Matching criteria 2 requires that a correlation exist between repeated musical patterns
and corresponding motion patterns. In figure 3.5, a music segment which belongs to the
cluster ‘A’ at time t1 repeats again at time t = 4 which means the feature values for the
segment at t = 1 must be similar to the feature values for the music segment at t = 4.
Based on criteria 2, the motion feature value at time t = 1 should be similar to the motion
feature values at time t = 4. By selecting the motion sequence which produces the
minimum difference between the two similarity matrices for music and motion sequences,
we can obtain the motion sequence which satisfies criteria 2.
Matching criteria 3 requires that changes in the auditory sensation of the music
should produce corresponding changes in visual sensation of the generated motion. When
the music play proceeds from the first music segment at time t = 1 to next segment at
time t = 2, the change of auditory sensation at the boundary between the first and the
second segments can be represented by the similarity between the feature vectors
between the two segments. In order to satisfy matching criteria 3, a similar amount of

46
change in the visual sensation between the first and the second motion segments should
occur. This can be achieved by selecting the motion sequence which produces the
minimum difference between the two similarity matrices for music and motion sequences.
Minimize difference M , M ,
NN
Figure 3.7: Similarity matrix and matching progressions of patterns
3.4.3 Correlation between Musical and Motion Features
Although the approach described in section 3.4.2 effectively matches the progressions
of patterns in music and the generated dance sequences, it is, however, not sufficient to
produce convincing results because it does not consider the correlation between the
features of the music and dance sequences.
For example, let’s consider only one feature for each feature space to demonstrate the
problem. As shown in figure 3.9, the loudness of a musical segment changes from 0.2 to
0.8 and then to 0.5 in the three consecutive musical segments. If we only apply the
approach described in section 3.4.2, two different motion sequences can be matched to
1 2 3 4 … 1 0.0 0.3 0.7 0.1 2 0.0 0.7 0.4 3 0.0 0.4 4 0.0 …
1 2 3 4 … 1 0.0 0.3 0.7 0.1 2 0.0 0.8 0.5 3 0.0 0.3 4 0.0 …
Music sequence
AA
Similarity matrix (motion) Similarity matrix (music)
a a
Motion sequence from motion graph
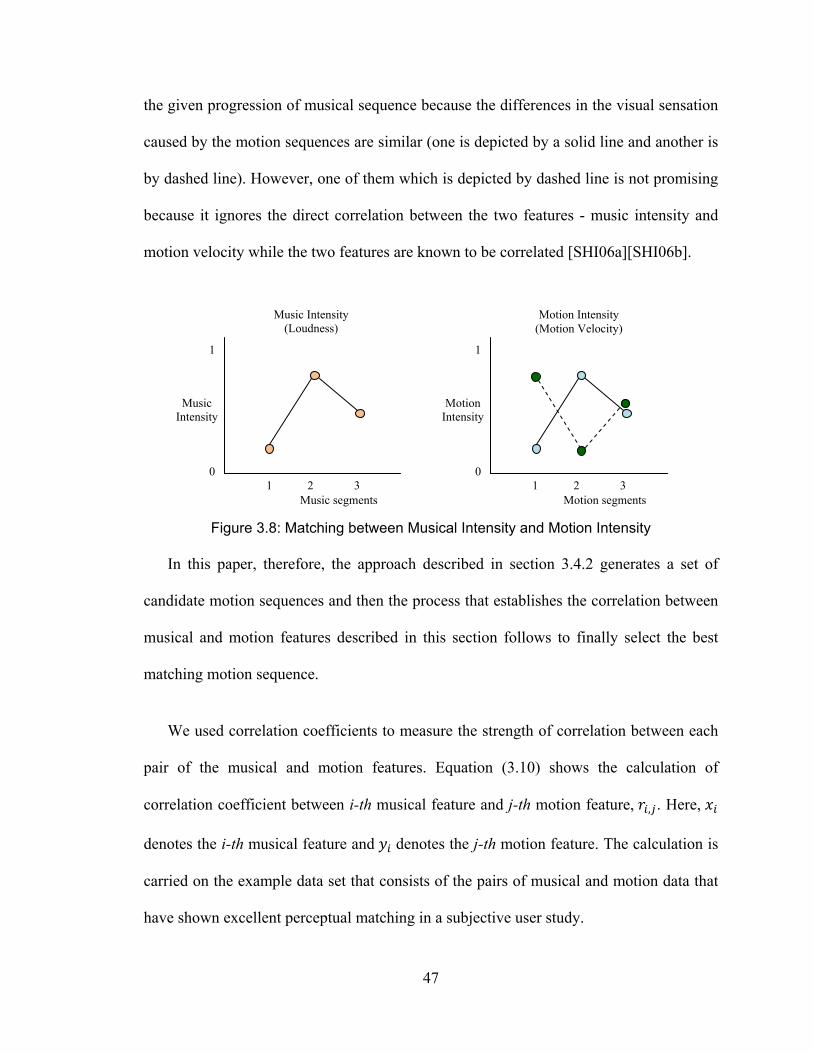
47
the given progression of musical sequence because the differences in the visual sensation
caused by the motion sequences are similar (one is depicted by a solid line and another is
by dashed line). However, one of them which is depicted by dashed line is not promising
because it ignores the direct correlation between the two features - music intensity and
motion velocity while the two features are known to be correlated [SHI06a][SHI06b].
Figure 3.8: Matching between Musical Intensity and Motion Intensity
In this paper, therefore, the approach described in section 3.4.2 generates a set of
candidate motion sequences and then the process that establishes the correlation between
musical and motion features described in this section follows to finally select the best
matching motion sequence.
We used correlation coefficients to measure the strength of correlation between each
pair of the musical and motion features. Equation (3.10) shows the calculation of
correlation coefficient between i-th musical feature and j-th motion feature, , . Here,
denotes the i-th musical feature and denotes the j-th motion feature. The calculation is
carried on the example data set that consists of the pairs of musical and motion data that
have shown excellent perceptual matching in a subjective user study.
Motion Intensity (Motion Velocity)
Music segments
Music Intensity (Loudness)
1
0 1 2 3
Music Intensity
Motion segments
1
01 2 3
Motion Intensity

48
,∑ ∑ ∑
∑ ∑ ∑ ∑ (3.10)
Human perception is known to be highly sensitive to changes in visual and auditory
sensations and it is assumed that changes in feature values have more perceptual
relevance than the feature values themselves. We must therefore consider changes in
sensations of both musical and motion contents when performing the matching process.
To do this, we calculate the correlation coefficients on changes in sensations in
corresponding pairs of music and motion segments using the equation (3.11). More
specifically, we compute the correlation coefficients between ∆ and ∆ . Here, ∆
denotes the difference of an i-th musical feature between two consecutive musical
segments and ∆ denotes the difference of a j-th motion feature between corresponding
two motion segments.
,∆ ∑∆ ∆ ∑∆ ∑∆
∑∆ ∑∆ ∑∆ ∑∆ (3.11)
In the matching process, for every musical-motion feature pairs that has strong or
moderate correlations, the difference between the motion feature value and expected
motion feature value that is determined by the regression function is calculated. For
example, if i-th musical feature and j-th motion feature has a strong correlation, then
the expected motion feature , is obtained by equation (3.12). Here, ,
denotes j-th motion feature of motion segment k and the function is a regression
function obtained from regression analysis on the example data set.
, , (3.12)

49
The difference , , between the real motion feature value , and the
expected motion feature , can be obtained by the equation (3.13).
, , , , , , (3.13)
The difference values , , are summed for every (i,j) pair that have moderate or
strong correlation and for every musical segment along with the corresponding motion
segment under consideration to evaluate the goodness of matching between musical and
motion sequences in terms of correlated features. Finally the motion sequence that
produces the minimum summed difference value is selected as the best match. The same
process is carried out on all the pairs of ∆ and ∆ that have moderate or strong
correlations.
3.4.4 Dance motion Generation System
The input to the dance motion generation system is a musical dataset and the output is
video data depicting human dance motion that is perceptually matched to the input music.
The motion-to-music matching is performed mainly by a combination of the similarity-
based approach and the correlation-based approach described in section 3.4.2 and 3.4.3
respectively. Figure 3.9 shows the architecture of the dance motion generation system
suggested in this dissertation. The details of each component are described below.
In a pre-processing phase, a motion graph is constructed. Motion sequences
( ∆ , 0, … , 1 and 0, … , ) are collected and saved in a
motion database and each motion sequence is then segmented into a number of motion
segments ( 0, … , , where denotes the number of

50
Figure 3.9: System Architecture
Music Analysis
Music Segmentation
Musical Feature Extraction
Similarity Analysis for Musical Sequence
Similarity Matrix for Musical Sequence
Similarity‐based matching
Motion‐to‐Music Matching
C.C. Matching
Movie Generation
Correlation Coefficients
Similarity Analysis for Motion Sequence
Similarity Matrix for Motion Sequence
Motion Database
Candidate Motion Sequences
Threshold %
Motion Beat Information
Musical sequence: ∆ , 0, … , 1
Motion Beat Information
,
,
,
,
,
C
, 0, … ,
,
,
Output: Video Data
,
,
Motion sequences: ∆ , 0, … , 1,
0, … ,
Motion Graph Construction Motion Segmentation Motion Feature
Extraction
,Nodes and edges
Motion GraphMotion Feature Vectors
,
Motion Database
Motion Graph Construction

51
segments of i-th motion clip). A motion feature extraction component then extracts the
motion features defined in section 3.3 and motion feature vectors are obtained. A motion
graph is finally constructed based on the motion segments and the corresponding motion
feature vectors.
At a run time, a musical sequence ( 0 ∆ , 0, … , 1) is fed into
the system as input and is segmented by a music segmentation component. This
component segments the music based on beat information that is extracted by the musical
feature extraction component. Each musical segment is analyzed and the thirty musical
features defined in section 3.2 are then extracted. This results in a sequence of musical
feature vectors representing the properties of the input musical data that are used in the
motion-to-music matching process.
A similarity matrix , ( 1 , 1 ) for the
input musical sequence is then constructed based on the sequence of musical vectors
created in the above step. The similarity matrix represents the perceptual similarities
among the musical segments in a musical piece as described in section 3.4.2. It therefore
contains information on the progression of musical patterns that can be used in the
motion-to-music matching process. This is done by comparing the musical data similarity
matrix with a similarity matrix that is generated for the motion sequence. Each cell in the
musical data similarity matrix represents the Euclidean distance between two points in
musical feature space. This calculation is carried out for every pair of musical segments.
The system then searches for a set of available motion paths in the motion graph that
was constructed in pre-processing phase. The search is carried out with the argument
52
that represents the number of segments of the input musical piece. The system
searches the graph to obtain all the motion paths that have length .
Progressions of patterns between musical and motion contents are then matched as
described in section 3.4.2. For each available motion path the similarity matrix for the
motion sequence is first constructed in the same fashion as the calculation of the
similarity matrix for musical segments described above. Here, , denotes the
similarity matrix for a motion sequence and denotes the k-th motion feature of
motion segment i. The difference between the similarity matrix for musical data and the
similarity matrix for motion data is calculated by summing up the differences on a cell by
cell basis. The set of candidate motion paths are determined by selecting the motion paths
that produce the least difference. The motion paths are ranked based on least difference
and top 10% of the paths are selected as candidate motion sequences.
For each candidate motion sequence selected in the above step, the system then
calculates a score that represent the degree of perceptual matching between musical and
motion contents based on the correlations that exist in the musical feature and motion
feature pairs as described in section 3.4.3. The score is calculated and accumulated for
every pair of musical and motion features that have at minimum moderate correlation
( 0.5). This process is repeated for all pairs of musical segments and
motion segments. The motion sequence that produces the lowest score is then selected as
the best matching motion sequence for the input musical piece. This process results in
the selection of the motion path with the strongest correlation to the input musical
features. This motion path is then used by the system to create a movie clip containing

53
both the input musical piece and a character animation based on the selected motion
sequence.

54
Chapter 4 -- User FeedBack
We conducted an user opinion study to validate the effectiveness of the suggested
approaches. This chapter presents methods, results, statistical analysis and discussion on
the user opinion study.
4.1 Introduction
We performed an user opinion study to validate the effectiveness of the approaches
suggested in this dissertation because it is difficult to evaluate dance performances using
any mathematical or algorithmic models. The user opinion study presented in this chapter
tests whether the suggested approaches can generate dance performances that show better
perceptual match to input musical piece than the ones generated by random walk.
Random walk here implies a process of selecting a sequence of motion segments that
selects the sequence randomly and aligns the beats of the dance sequence and the input
music. Often random walk can generate perceptually interesting dance movements when
they are matched to the input musical piece in terms of beat information. We therefore
show that the results generated by the suggested approaches can produce more
convincing results than the results generated by random walks
This study will test the following hypotheses:
Hypothesis 1: The suggested approach can generate more creative dance
performance than random walk.

55
Hypothesis 2: The suggested approach can generate more realistic dance
performance than random walk.
Hypothesis 3: The suggested approach can generate dance performances that express
characteristics of input music better than random walk.
Hypothesis 4: Overall evaluation of the results generated by the suggested approach
is better than the evaluation of the results generated by random walk.
4.2 Methods
The participants of the study consist of twenty people, fourteen of them were males
and six of them were females. The ages range from fifteen to forty two and the average of
the ages was 26.01. All the participants volunteered to participate in this study and they
were not paid for the study.
Eight dance performances are shown to the users during the study. The user opinion
study consists of two separate sessions: one is a training session and another is a
evaluation session. Two of the eight dance performances were used in the training session
and other six of them were used in evaluation session. There are two categories of dance
performance data. One category represents the dance performances generated by the
suggested approach and another category represents the dance performances generated by
random walk. Each category consists of three dance performances that were generated
with input music that has different tempo – slow, intermediate, and fast. The stimuli
therefore consist of six conditions in total. The six dance performances used in evaluation

56
session were randomly ordered and each user was provided with dance performances
with different orders.
The dance motion sequences were generated automatically by applying the suggested
approaches and random search method respectively for the given input music and the
motion graph constructed in preprocessing. The input data used in dance motion
generation was uncompressed wave format musical data that contain 44,100Hz, 16 bit,
stereo music. Motion data were HTR (Hierarchical Translation-Rotation) format motion
data. The human model has twenty segments and the data frame rate was thirty frames
per second. The resulting dance motion sequences were rendered into images by using
BMRT renderer and then the images are combined and the corresponding musical pieces
are added using ADOBE Premiere. The movie clips are finally generated in the format of
AVI.
During the study, after the training session, participants are asked to view six video
clips that contain dance performances with accompanying music. Each video clip takes
about 25 seconds. After viewing each video clip, they are asked to answer four questions
about the quality of the dance performance by scoring the quality of the dance
performance they saw using seven level Likert scale. The questions are shown in fig 4.1.
The question 1 asks a participant whether or not she feels that the virtual character
showed creative dance movements to the music. If she feels it did, she will give a high
score. Otherwise, if she feels that it just showed routine movements, you will give a low
score. The question 2 asks a participant if she feels that the dance performance of the
virtual character looked similar to a real human dancing to the music. If so she will give a

57
high score. The question 3 asks a participant how well she feels the dance performance
matched the music. If she feels that the performance expressed the music well, she will
give a high score. Finally, the last question asks a participant’s overall evaluation of the
dance performance. If she really liked the dance performance or she feels it is good, she
will give a high score.
Figure 4.1 The Questions used in the User Opinion Study
4.3 Results
This section presents the results of statistical analysis on the user opinion study data.
We used single factor ANOVA (Analysis of Variance) to analyze the result and the
analyses results for each hypothesis are as follows.

58
Prediction 1: Dance performance generated by suggested approach looks more creative.
The difference was significant for fast (F = 17.273, p = 0.0 < 0.001) and slow (F =
17.300, p = 0.0 < 0.001) music (Table 4.1). The null hypothesis, that the results were the
same, was rejected.
Table 4.1 Statistical Analysis of the Results for Prediction 1
Musical Tempo
Suggested Approaches
Random Walk F-value P-value
Fast 5.5 3.5 17.273 < 0.001 Intermediate 4.65 4.6 0.015 0.902
Slow 5.55 3.85 17.300 0.000
Prediction 2: Dance performance generated by suggested approach looks more realistic.
The difference was significant for fast (F = 4.560, p = 0.039 < 0.05), intermediate (F
= 6.818, p = 0.013 < 0.05), and slow (F = 6.818, p = 0.013 < 0.05) music (Table 4.2). The
null hypothesis, that the results were the same, was rejected.
Table 4.2 Statistical Analysis of the Results for Prediction 2
Musical Tempo
Suggested Approaches
Random Walk F-value P-value
Fast 6.2 5.6 4.560 0.039 Intermediate 6.35 5.6 6.818 0.013
Slow 6.4 5.85 6.818 0.013
Prediction 3: Dance performance generated by suggested approach looks more
expressive.

59
The difference was significant for fast (F = 76.382, p = 0.000 < 0.001), intermediate
(F = 5.240, p = 0.028 < 0.05), and slow (F = 115.024, p = 0.000 < 0.001) music (Table
4.3). The null hypothesis, that the results were the same, was rejected.
Table 4.3 Statistical Analysis of the Results for Prediction 3
Musical Tempo
Suggested Approaches
Random Walk F-value P-value
Fast 6.45 4.45 76.382 < 0.001 Intermediate 5.75 4.7 5.240 0.028
Slow 6.05 3.1 115.024 < 0.001
Prediction 4: Dance performance generated by suggested approach looks better overall.
The difference was significant for fast (F = 13.977, p = 0.001 < 0.05) and slow (F =
42.309, p = 0.000 < 0.001) music. The null hypothesis, that the results were the same,
was rejected.
Table 4.4 Statistical Analysis of the Results for Prediction 4
Musical Tempo
Suggested Approaches
Random Walk F-value P-value
Fast 6.1 4.75 13.977 0.001 Intermediate 5.5 4.95 3.386 0.074
Slow 6.15 4.35 42.309 < 0.001
4.4 Discussion
The null hypotheses were rejected at the .05 or .01 level in all but two of the twelve
cases. In all cases the score was higher for our approach, implying that there is a
difference in response to the dance clips and that the approach presented here produces
better results than a random one.

60
For us the most important prediction is that the suggested approach can generate a
dance performance that is perceptually well matched (expresses the music) to the input
music. We also observed that people tend to think that the dance performances are more
realistic and creative when they are perceptually well matched to the music. This result
was somewhat unexpected because our approach does not have any functionality to
generate “creative” dance movements and all the dance motions are realistic because they
had been captured from real dancer’s movements. It may be that there is an underlying
positive response (possibly aesthetic) that causes this correlation in the results.
We also noted that the two cases where the null hypothesis could not be rejected both
correspond to the intermediate tempo and that the ratings for the intermediate tempo are
closest in all four cases. This could be an interaction effect with tempo or it could have
something to do with the participants overall experience with dancing.
Overall we feel encouraged by the study and think it suggests that our approach is
promising.

61
Chapter 5 -- Conclusions and Future Work
This dissertation proposes a novel approach that addresses the problem of automatic
dance motion generation. The proposed approach automatically generates a dance
performance for a piece of music by matching the progressions of patterns in musical and
motion contents as well as correlating musical and motion features. The proposed
approach has a number of important advantages over current approaches.
First, the abundance of features used in this approach generates better results than
current approaches where a limited number of features are used. In this work, a set of
motion features was developed for describing the postural and dynamic properties of
human motion. These features were shown to effectively represent the qualitative
properties of human dance motion in quantitative measures. The usefulness of these
novel motion features are not limited to the motion-to-music matching problem, but are
also useful for many other applications such as motion analysis or motion retrieval
problems.
Second, a set of matching criteria were suggested to evaluate the quality of matching
between each motion sequence in a motion database and the given musical piece.
Matching between musical and motion data is performed by searching the motion graph
and selecting a path representing a sequence of motions that best matches a given musical
segment. Results of human subject studies performed in this effort showed that these
criteria are indeed feasible and can generate natural, realistic, pleasing, and perceptually
appropriate dance motion for musical input.

62
Third, a similarity-based matching approach was introduced in this dissertation that
effectively achieve matches the progressions of patterns in musical and motion contents.
This is a critical component necessary for the generation of perceptually appropriate
dance motion that has been ignored in current approaches. Current approaches have
focused exclusively on correlating local musical and motion features. In this dissertation
we demonstrated that the matching of progressions of patterns is more critical in dance
motion generation than the correlation of local musical and motion features.
Finally, the perceptual relationship between musical and motion features was
explored in order to establish a perceptual correlation between musical and motion
contents. Correlation coefficients were used to establish the relationship between a pair of
musical and motion features and the result of correlation analysis was used to guide the
search for the best motion sequence for the given musical input in the matching process.
This analysis demonstrated that changes in the feature values of consecutive musical and
motion segments had a stronger perceptual correlation than the feature values themselves.
This novel finding resulted in improved perceptual matching in the generated dance
motion.
The approach proposed in this dissertation has a number of application areas where a
perceptually optimal mapping between two different media types is needed. Examples of
this include: abstract animation, movie clip generation, textures generation from musical
data or automatic music or sound effects generation from motion data.
When motion graph approaches are used, the complexity of a motion graph is an
important factor that impacts the performance of the matching algorithm. A large number

63
of motion segments and transitions amongst them will generally produce better
performance in the matching algorithm. However, as the size of the graph increases, the
time complexity of most graph search algorithms increases exponentially. It is therefore
necessary to develop an efficient graph search algorithm that guarantees interactive-time
performance.

64
References
[ALA05] Alankus, G., Bayazit, A., and Bayazit, O. “Automated Motion Synthesis for
Dancing Characters.” Journal of Computer Animation and Virtual Worlds, Oct.
2005.
[ARI02] Arikan, O., and Forsythe, D. “Interactive Motion Generation from Examples.”
In Proceedings of ACM SIGGRAPH 2002, Annual Conference Series, ACM
SIGGRAPH.
[BOD97] Bobby Bodenheimer, Charles Rose, Seth Rosenthal, and John Pella. “The
Process of Motion Capture: Dealing with the Data.” In Computer Animation and
Simulation, Eurographics Workshop, Springer-Verlag, 1997, pp.3-18.
[BRA99] Brand, M. “Voice Puppetry.” In Proceedings of SIGGRAPH 1999, ACM Press
/ACM SIGGRAPH, Los Angeles, A. Rockwood, Ed., Computer Graphics
Proceedings, Annual Conference Series, ACM, 21.28.
[BRE97] Bregler, C., Covell, M., and Slaney, M. “Video Rewrite: Driving Visual Speech
with Audio” SIGGRAPH 97, Los Angeles, CA (in press).
[BRO94] Brooke, N., and Scott, S. “Computer Graphics Animations of Talking Faces
based on Stochastic Models.” In Intl. Symposium on Speech, Image Processing,
and Neural Networks, 1994.
[BUR92] Allen W. Burton, Nancy L. Greer, and Diane M. Wiese. “Changes in Overhand
Throwing Patterns as a Function of Ball Size.” Pediatric Exercise Science, 4(1),
Feb. 1992, pp.50-67.

65
[CAR02] Cardle, M., Barthe, L., Brooks, S., and Robinson, P. “Music-Driven Motion
Editing: Local Motion Transformations Guided by Music Analysis.” In
Proceedings of Eurographics 2002.
[CHI00] Chi, D., Costa, M., Zhao, L., and Badler, N. "The EMOTE Model for Effort and
Shape." Proceedings of SIGGRAPH 2000, ACM Computer Graphics Annual
Conference, New Orleans, Louisiana, 23-28 July, 2000, pp. 173-182.
[CHU99] Shih-kai Chung and James K. Hahn. “Animation of Human Walking in Virtual
Environments.” In Proceedings of Computer Animation '99, May 1999, pp.4-15.
[COH90] Cohen, M. and Massaro, D. “Synthesis of Visible Speech.” Behavioral
Research Methods and Instrumentation, 22, 260-263, 1990.
[COH93] Cohen, M. and Massaro, D. “Modeling Coarticulation in Synthetic Visual
Speech”, in Magnenat-Thalmann N., Thalmann D. (Editors), Models and
Techniques in Computer Animation, Springer Verlag, Tokyo, 1993, pp. 139-156.
[COO01] Cooper, M. and Foote, J. “Visualizing Musical Structure and Rhythm via Self-
Similarity”, Proceedings of the International Conference on Computer Music,
2001.
[DAV80] Davis, S., and Mermelstein, P. “Experiments in Syllable-Based Recognition of
Continuous Speech.” IEEE Transactions on Acoustics, Speech and Signal
Processing, 28:357–366, 1980.
[DOB03] Dobrian, C. and Bevilacqua, F. “Gestural Control of Music: using the Vicon 8
Motion Capture System.” In Proceedings of the Conference on New Interfaces
for Musical Expression. 2003.

66
[GLE97] Michael Gleicher. “Motion Editing with Spacetime Constraints.” In Interactive
3D Graphics 1997, pp.139-148.
[GLE98] Michael Gleicher. “Retargetting Motion to New Characters.” In Proceedings of
SIGGRAPH 1998, Aug. 1998, pp.33-42.
[GUI94] Guiard-Marigny, T., Adjoudani, A., and C. Benoit. “A 3-D Model of the Lips
for Visual Speech Synthesis.” Proc.ESCA/IEEE Workshop on Speech Synthesis,
New Paltz, NY, pp. 49–52, 1994.
[HAH95] Hahn, J., Geigel, J., Lee, J.W., Gritz, L., Takala, T., and Mishra, S. "An
Integrated Approach to Sound and Motion." Journal of Visualization and
Computer Animation, Volume 6, Issue No. 2, pp. 109-123, 1995.
[HOD95] Jessica Hodgins, Wayne Wooten, David Brogan, and James O’Brien.
“Animating Human Athletics.” In Proceedings of SIGGRAPH 1995, Aug. 1995,
pp.71-78.
[HOD97] Jessica Hodgins and Nancy Pollard. “Adapting Simulated Behaviors for New
Characters.” In Proceedings of SIGGRAPH 1997, Aug. 1997, pp.153-162.
[KIM03] Kim, T., Park, S., and Shin, S. “Rhythmic-Motion Synthesis Based on Motion-
Beat Analysis.” In Proceedings of ACM SIGGRAPH 2003, Annual Conference
Series, ACM SIGGRAPH.
[KOV02] Kovar, L., Gleicher, M., and Pighin, F. “Motion graphs.” In Proceedings of
SIGGRAPH 2002, Annual Conference Series, ACM SIGGRAPH.
[LEE95] Lee, Y., Terzopoulos, D., and Waters, K. “Realistic Modeling for Facial
Animation.” In Proceedings of SIGGRAPH 1995, ACM Press / ACM

67
SIGGRAPH, Los Angeles, California, Computer Graphics Proceedings, Annual
Conference Series, ACM, 55.62.
[LEE02] Lee, J., Chai, J., Reitsma, P. S. A., Hodgins, J. K., and Pollard, N. S.
“Interactive Control of Avatars Animated with Human Motion Data.” In
Proceedings of ACM SIGGRAPH 2002, Annual Conference Series, ACM
SIGGRAPH.
[LEE05] Lee, H., and Lee, I. “Automatic Synchronization of Background Music and
Motion in Computer Animation.” In Proceedings of Eurographics 2005.
[LEV04] Levin, G. and Lieberman, G. “In-Situ Speech Visualization in Real-time
Interactive Installation and Performance.” In Proceedings of The 3rd
International Symposium on Non-Photorealistic Animation and Rendering, pages
7-14. ACM Press, 2004.
[LEW91] Lewis, J. “Automated Lip-Sync: Background and Techniques." J.Visualization
and Computer Animation, 2(4):118–122, 1991. ISSN 1049-8907.
[LI02] Li, Y., Wang, T., and Shum, H.-Y. “Motion Texture: A Two-Level Statistical
Model for Character Motion Synthesis.” In Proceedings of ACM SIGGRAPH
2002, Annual Conference Series, ACM SIGGRAPH.
[LYT] Wayne Lytle, AniMusic, http://www.animusic.com/.
[MAK75] Makhoul, J. “Linear Prediction: A Tutorial Overview.” Proceedings of the
IEEE, 63:561–580, 1975.
[MIS95]Mishra, S. and Hahn, J. "Mapping Motion to Sound and Music in Computer
Animation and VE." Invited Paper, Pacific graphics, August 21-August 24, 1995.

68
[MIS05] Misra, A., Wang, G. and Cook, P. R. “sndtools: Real-Time Audio DSP and 3D
Visualization”, Proceedings of the International Computer Music Conference,
2005.
[MOL96] Tom Molet, Ronan Boulic, and Daniel Thalmann. “A Real Time Anatomical
Converter for Human Motion Capture.” In Computer Animation and Simulation,
Eurographics Workshop, Springer-Verlag, 1996, pp.79-94.
[MOR91] Morishima, S., and Harashima, H. “A Media conversion from Speech to Facial
Image for Intelligent Man-Machine Interface.” IEEE J Selected Areas
Communications, 9 (4):594–600, 1991. ISSN 0733-8716.
[MOR04] Morioka, H., Nakatani, M., and Nishida, S. “Proposal of an Algorithm to
Synthesize Music Suitable for Dance.” In Proceedings of the ACM SIGCHI
International Conference on Advances in Computer Entertainment Technology
2004.
[OBR00] James F. O'Brien, Robert E. Bodenheimer, Gabriel J. Brostow, and Jessica K.
Hodgins. “Automatic Joint Parameter Estimation from Magnetic Motion Capture
Data.” Proceedings of Graphics Interface 2000, Montreal, Quebec, Canada, May
15-17, pp. 53-60.
[OLI97] Oliver, W., Yu, J., and Metois, E. “The Singing Tree: Design of an Interactive
Musical Interface.” In DIS '97: Proceedings of the conference on Designing
interactive systems: processes, practices, methods, and techniques, pages 261-
264. ACM Press, 1997.

69
[Ox02] Ox, J. “2 performances in the 21st Century Virtual Color Organ.” In Proceedings
of the fourth conference on Creativity & Cognition, pages 20-24. ACM Press,
2002.
[PAR72] Parke, F. “Computer Generated Animation of Faces.” Proc.ACM National
Conf., pp. 451–457, 1972.
[PAR74] Parke, F. “A Parametric Model for Human Faces.” Tech. Report UTEC-CSc-
75-047 Salt Lake City: University of Utah, 1974.
[PEA86] Pearce, A., Wyvill, B., Wyvill, G., and Hill, D. “Speech and Expression: A
Computer Solution to Face Animation.” Graphics Interface, 1986.
[PER06] Perera, M., Shiratori, T., and Kudoh, S. 2006. Task Recognition and Style
Analysis in Dance Sequences. In Proceedings of IEEE International Conference
on Multisensor Fusion and Integration for Intelligent Systems. 2006.
[SAU07] Sauer, D., and Yang, Y. “Music-Driven Character Animation.” ACM
Transactions on Multimedia Computing, Communications and Applications.
2007.
[SHI04] Shiratori, T., Nakazawa, A., and Ikeuchi, K. “Detecting Dance Motion Structure
using Motion Capture and Musical Information.” In Proceedings of International
Conference on Virtual Systems and Multimedia. 2004.
[SHI06a] Shiratori, T., Nakazawa, A., and Ikeuchi, K. “Dancing-to-Music Character
Animation.” In Proceedings of Eurographics 2006.
[SHI06b] Shiratori, T., Nakazawa, A., and Ikeuchi, K. “Synthesizing Dance Performance
using Musical and Motion Features.” In Proceedings of IEEE International
Conference on Robotics and Automation 2006.

70
[TAK92] Takala, T. and Hahn, J. "Sound Rendering." Computer graphics, Proceedings
SIGGRAPH '92, Association for Computing Machinery (ACM), Vol. 26, No. 2
(July 1992), pp. 211- 220.
[TAK93] Takala, T., Hahn, J., Gritz, L., Geigel, J., and Lee, J.W. "Using Physically-
Based Models and Genetic Algorithms for Functional Composition of Sound
Signals, Synchronized to Animated Motion." International Computer Music
Conference (ICMC), Tokyo, Japan, Sept. 10-15, 1993.
[TOL00] Tolonen, T. and Karjalainen, M. “A Computationally Efficient Multipitch
Analysis Model.” IEEE Trans. on Speech and Audio Processing, 8(6):708–716,
Nov. 2000.
[TZA02]Tzanetakis, G. “Manipulation, Analysis and Retrieval Systems for Audio
Signals.” Ph.D dissertation Princeton University, 2002.
[WAT87] Waters, K. “A Muscle Model for Animating Three-Dimensional Facial
Expression.” IEEE Computer Graphics, 21(4), 1987.
[WIT95] Andrew Witkin and Zoran Popovic. “Motion Warping.” In Proceedings of
SIGGRAPH 1995, Aug. 1995, pp.105-108.
[WOL96] Wold, E., Blum, T., Keislar, D., and Wheaton, J. “Content-based classification,
search and retrieval of audio.” IEEE Multimedia, 3(2), 1996.
Related Documents











