pbrt : a Tutorial Luís Paulo Santos Departamento de Informática Universidade do Minho Janeiro, 2008 Abstract This document is a hands-on tutorial for using pbrt (PHYSICALLY BASED RAY TRACER) and developing plug-ins for it. Some basic examples are used to illustrate how to achieve this. This tutorial is neither an in-depth manual of pbrt nor a discussion of the concepts behind plug-ins or pluggable components. The reader is referred to the pbrt book (Pharr & Humphreys, 2004) for further details. Installation Before trying these tutorials you should install pbrt on your machine. Access http://www.pbrt.org and follow the instructions. Note that pbrt saves images as an EXR file. In order to be able to successfully compile pbrt you need to install OpenEXR beforehand. Please access http://www.openexr.com and install the latest stable version of IlmBase and OpenEXR. In order to view the images you might need the OpenEXR viewers –you might alsouse some freeware viewer that supports EXR, such as InfanView for Windows (http://www.irfanview.com/ ). Introduction pbrt is a ray tracing system with very solid theoretical foundations. It is thus used to illustrate ray tracing and global illumination algorithms throughout this course. The key characteristic of pbrt architecture is that it is organized as a ray tracing core and a set of components. The core coordinates interactions among components, while the components are responsible for all remaining tasks, such as shooting rays, space traversal, objects intersections, integration, image generation, etc. These components are separate object files, loaded by the core at run time – they are referred to as plug-ins. pbrt can thus be easily extended by writing new plug-ins for the various functional blocks. The core imposes a strict API and enforces a strict interface protocol, thus helping ensuring a clean component design. The pbrt executable consists of the core code that drives the system’s main flow of control, but contains no code related to specific elements, such as objects, light sources or cameras. These are provided as separate components, loaded by the core at run time according to the scene

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
pbrt : a Tutorial
Luís Paulo Santos
Departamento de Informática
Universidade do Minho
Janeiro, 2008
Abstract
This document is a hands-on tutorial for using pbrt (PHYSICALLY BASED RAY TRACER) and
developing plug-ins for it. Some basic examples are used to illustrate how to achieve this.
This tutorial is neither an in-depth manual of pbrt nor a discussion of the concepts behind
plug-ins or pluggable components. The reader is referred to the pbrt book (Pharr &
Humphreys, 2004) for further details.
Installation
Before trying these tutorials you should install pbrt on your machine.
Access http://www.pbrt.org and follow the instructions.
Note that pbrt saves images as an EXR file. In order to be able to successfully compile pbrt you
need to install OpenEXR beforehand. Please access http://www.openexr.com and install the
latest stable version of IlmBase and OpenEXR. In order to view the images you might need the
OpenEXR viewers –you might alsouse some freeware viewer that supports EXR, such as
InfanView for Windows (http://www.irfanview.com/).
Introduction
pbrt is a ray tracing system with very solid theoretical foundations. It is thus used to illustrate
ray tracing and global illumination algorithms throughout this course.
The key characteristic of pbrt architecture is that it is organized as a ray tracing core and a set
of components. The core coordinates interactions among components, while the components
are responsible for all remaining tasks, such as shooting rays, space traversal, objects
intersections, integration, image generation, etc. These components are separate object files,
loaded by the core at run time – they are referred to as plug-ins. pbrt can thus be easily
extended by writing new plug-ins for the various functional blocks. The core imposes a strict
API and enforces a strict interface protocol, thus helping ensuring a clean component design.
The pbrt executable consists of the core code that drives the system’s main flow of control, but
contains no code related to specific elements, such as objects, light sources or cameras. These
are provided as separate components, loaded by the core at run time according to the scene
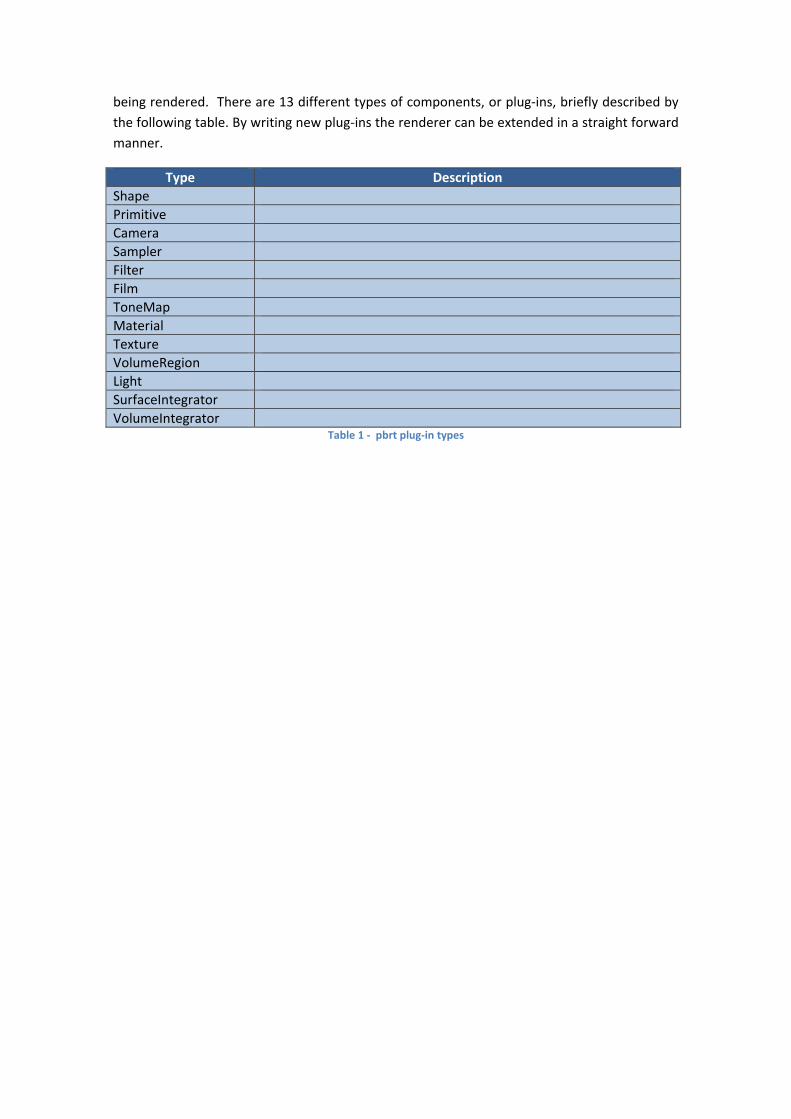
being rendered. There are 13 different types of components, or plug-ins, briefly described by
the following table. By writing new plug-ins the renderer can be extended in a straight forward
manner.
Type Description
Shape
Primitive
Camera
Sampler
Filter
Film
ToneMap
Material
Texture
VolumeRegion
Light
SurfaceIntegrator
VolumeIntegrator Table 1 - pbrt plug-in types

Tutorial 1 – Rendering and visualization
To follow this small, first tutorial you will need access to pbrt, exrdisplay and exrtotiff. Make
sure these are installed in your system. You also need the the cornell box scene and a few High
Dynamic Range (HDR) images in .exr format.
Rendering
The scene description is given in a .pbrt file. This includes geometry, materials’ properties, light
positions and radiant power, etc.
Open a shell, change to the scenes directory and render the cornell box by writing:
> pbrt cornell.pbrt
You can now visualize the image by writing:
> exrdisplay cornell.exr
pbrt is a physically based renderer, thus it generates High Dynamic Range images. In practice
the pixels’ values stored on the output file have floating point values that can range from 0 to
any maximum number. To visualize the image using exrdisplay you may need to adjust
exposure, which you can do using the top slider on the view window.
The quality of the rendered image depends on many parameters and on the particular choice
of algorithms used. The noise you see on the image depends, among others, on the number of
samples, i.e. rays, taken per pixel. Increase this number to 16 by changing the “pixelsamples”
parameter on the Sampler component as follows:
Sampler "bestcandidate" "integer pixelsamples" [16]
Render and visualize the new image. You might notice that noise was reduced but,
unfortunately, rendering time increased a lot.
If you look carefully to the resulting image you will notice that some things are wrong. For
instance, the ceiling is not illuminated by the lamp and the mirror does not project a reflection
of the light into the floor. Global illumination is all about selecting and simulating the most
relevant paths followed by light. The algorithm used to select these light paths is referred to as
the “surface integrator”. The integrator used on the previous runs only selects direct
illumination paths (from the light source to the objects) and specular paths (from specular
surfaces, such as mirrors and glass, to the observer). Other integrators will select additional
light paths, but may take longer to execute.
Edit the cornell.pbrt file such that it uses the “path” surface integrator and only shoots 4
primary rays per pixel:
Sampler "bestcandidate" "integer pixelsamples" [4] SurfaceIntegrator "path"

Render the image again and visualize it. The first thing you will notice is that the image is full of
noise. In fact, path tracing stochastically selects which light paths to trace, does the final result
will have variance which human observers perceive as noise. Variance, or noise, can be
reduced by increasing the number of samples taken. Unfortunately, rendering time increases
linearly with the number of samples but variance reduces with the square of the number of
paths. In practice, you’ll have to take 4 times more samples to have variance. Do so by
changing the Sampler parameter:
Sampler "bestcandidate" "integer pixelsamples" [16]
Even though noise is still too disturbing you might notice that the ceiling is being lighten by the
light source and the mirror is projecting a reflection of the light source onto the floor (this is
referred to as a caustic).
To get a “good” image many samples per pixel are required. Path tracing will simulate all light
transport phenomena but takes too much time. The irradiance cache is a faster method to
simulate diffuse interreflections – this is why the ceiling is illuminated: light from the light
source is reflected from the walls to the ceiling and then to the view point. Change the surface
integrator by writing:
Sampler "bestcandidate" "integer pixelsamples" [4] SurfaceIntegrator "irradiancecache"
Visualization and Tone Mapping
The EXR image is not appropriate for visualization on current displays. The range of luminance
values present on these images has no formal maximum value, while displays usually can only
display luminances ranging from 0.1 to 100 candelas/m2.
These high dynamic range images are either visualized using special programs, such as
exrtotiff, where you can set the exposure, or they have to be converted to Low Dynamic Range
Images. Doing so is the role of tone mapping algorithms.
Tone mapping algorithms strive to maintain local contrast rather than apparent brightness,
and usually do so by resorting to models of the Human Visual System. These algorithms can be
either global or local. Global algorithms calculate a single mapping factor that is then applied
to all pixels, whereas local algorithms calculate a different mapping factor for each pixel based
on information about each pixel neighborhood.
pbrt distribution includes 4 different tone mapping components:
• contrast – tries to maximize contrast using the notion of Just Noticeable Differences. Is
a global operator. Receives as parameter the display adaptation level:
“displayadaptationY”, with a default value of 50;

• maxwhite – global operator that sets the maximum luminance on the image to the
display maximum luminance and than scales all pixels by the same factor;
• highcontrast – local operator that maximizes contrast on a given neighborhood;
• nonlinear – local algorithm that uses an empirical operator based on a S-shaped curve.
Accepts the world adaptation level as a parameter (maxY), with a default value of 0.0
Try these operators by using exrtotiff and displaying both the original HDR image (exrdisplay)
and the resulting LDR tiff image.
Examples:
> exrtotiff –tonemap contrast –param “displayadaptationY” 5.0 StillLife.exr StillLife.tif
> exrtotiff –tonemap maxwhite StillLife.exr StillLife.tif
> exrtotiff –tonemap highcontrast StillLife.exr StillLife.tif
> exrtotiff –tonemap nonlinear –param “maxY” 1.0 StillLife.exr StillLife.tif
Tutorial 2 – Materials and BSDFs
Materials in pbrt describe a surface BSDF. If the BSDF varies over the surface, then Textures
are used to determine the material properties at particular points.
Materials are components, which are loaded at run time. It is thus possible to write a new
material, in C++, and have pbrt load it on demand. It is the scene description file that indicates
which materials will be used and associated with which objects.
pbrt includes a number of plug-ins for materials, whose description can be found on Chapter
10 and Appendix C of (Pharr & Humphreys, 2004).
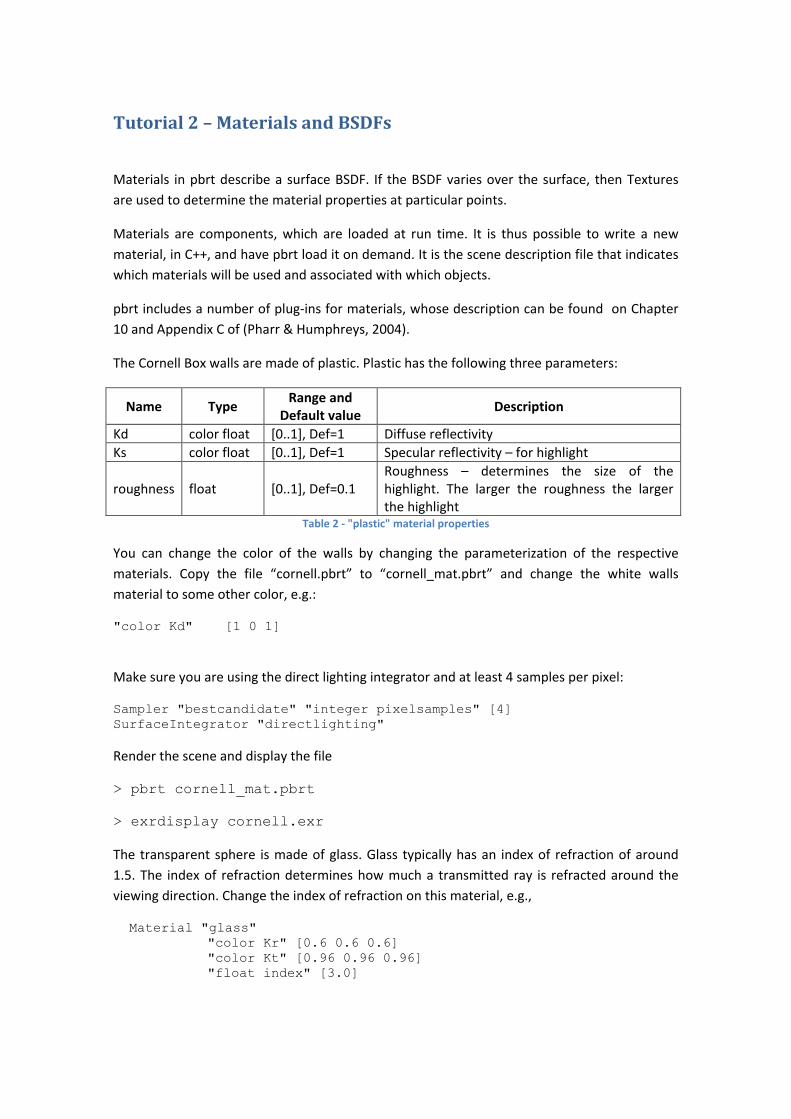
The Cornell Box walls are made of plastic. Plastic has the following three parameters:
Name Type Range and
Default value Description
Kd color float [0..1], Def=1 Diffuse reflectivity
Ks color float [0..1], Def=1 Specular reflectivity – for highlight
roughness float [0..1], Def=0.1
Roughness – determines the size of the
highlight. The larger the roughness the larger
the highlight Table 2 - "plastic" material properties
You can change the color of the walls by changing the parameterization of the respective
materials. Copy the file “cornell.pbrt” to “cornell_mat.pbrt” and change the white walls
material to some other color, e.g.:
"color Kd" [1 0 1]
Make sure you are using the direct lighting integrator and at least 4 samples per pixel:
Sampler "bestcandidate" "integer pixelsamples" [4] SurfaceIntegrator "directlighting"
Render the scene and display the file
> pbrt cornell_mat.pbrt
> exrdisplay cornell.exr
The transparent sphere is made of glass. Glass typically has an index of refraction of around
1.5. The index of refraction determines how much a transmitted ray is refracted around the
viewing direction. Change the index of refraction on this material, e.g.,
Material "glass" "color Kr" [0.6 0.6 0.6] "color Kt" [0.96 0.96 0.96] "float index" [3.0]

You can also change the color of the glass by changing the remaining parameters:
# glass material Material "glass" "color Kr" [0.6 0.6 0.6] "color Kt" [0 0.96 0] "float index" [3]
Textures
Textures are used to spatially vary the BRDF parameters. In pbrt you have to either create the
texture (if it is procedural) or load it (if it is an image map) and then associate the texture with
a material parameter.
Textures might either be maps of floats or “color” data type. The latter is a vector with as
many floats as the “Spectrum” data type; by default this is 3 elements: R, G and B. pbrt can
generate procedural textures; these are plug-ins, thus the set of procedural textures can be
increased by writing new components. The set of provided textures is described in page 931
of (Pharr & Humphreys, 2004).
Add the following line to cornell_mat.pbrt to create a checkerboard procedural texture,
named checks:
Texture "checks" "color" "checkerboard" "float uscale" [4] "float vscale" [4] "color tex1" [0 0 1] "color tex2" [0 1 1]
You can now associate this texture with parameters of any given material. For example,
change the white wall diffuse reflection coefficient:
Material "plastic" "texture Kd" "checks" "color Ks" [0.1 0.1 0.1] "float roughness" 0.15
Textures can also be loaded from a file in EXR format. The following line loads a float texture
from file textures/sponza/sp_luk.exr and names it sponza-bump:
Texture "sponza-bump" "float" "imagemap" "string filename" ["textures/sponza/sp_luk.exr"]
You can now modulate any one-dimensional parameter. It can also be used as a bump map, to
perturb a surface shading normal. The following command bump maps the white wall:
Material "plastic" "texture Kd" "checks" "color Ks" [0.1 0.1 0.1] "float roughness" 0.15 "texture bumpmap" "sponza-bump"
Play around with textures to modulate any material you want.

Tutorial 3
Introduction
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
this tutorial.
We will build on the DirectNoSha
complexity to it.
Remember that this integrator does not shoot shadow rays. It uses the following expression to
shade each point:
DirectShadows integrator
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
direct lighting (
shoots shadow rays and thus object
given by
where
source s
In pbrt the
shoot this shadow feeler. This method is
the scene
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
method.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
seconds, respectively.
Tutorial 3 –
Introduction
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
this tutorial.
We will build on the DirectNoSha
complexity to it.
Remember that this integrator does not shoot shadow rays. It uses the following expression to
shade each point:
DirectShadows integrator
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
direct lighting (directly
shoots shadow rays and thus object
given by � � ∑for all light sources i
where V(p,Li) stands for visibility between the intersection point
source surface. This function is evaluated by casting a ray and returns either 1 or 0.
In pbrt the LighT::Sample_L()
shoot this shadow feeler. This method is
the scene as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
method. REMEMBER
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
seconds, respectively.
Whitted ray tracing surface integrator
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
We will build on the DirectNoSha
Remember that this integrator does not shoot shadow rays. It uses the following expression to
shade each point:
� � �for all light sources i
DirectShadows integrator
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
directly from the light sources), but taking into consideration occlusions, i.e., it
shoots shadow rays and thus object
for all light sources i
stands for visibility between the intersection point
urface. This function is evaluated by casting a ray and returns either 1 or 0.
LighT::Sample_L()
shoot this shadow feeler. This method is
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
EMEMBER: shooting rays is the most expensive task in a ray tracer.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
seconds, respectively.
Whitted ray tracing surface integrator
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
We will build on the DirectNoShadows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
� ��ray directionfor all light sources i
DirectShadows integrator
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
shoots shadow rays and thus objects cast shadows onto each others. The returned radiance is
��ray directionfor all light sources i
stands for visibility between the intersection point
urface. This function is evaluated by casting a ray and returns either 1 or 0.
LighT::Sample_L() method returns a visibility tester that can be used to
shoot this shadow feeler. This method is
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
: shooting rays is the most expensive task in a ray tracer.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
Whitted ray tracing surface integrator
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
dows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
�ray direction
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
s cast shadows onto each others. The returned radiance is
ray direction, ������� �
stands for visibility between the intersection point
urface. This function is evaluated by casting a ray and returns either 1 or 0.
method returns a visibility tester that can be used to
shoot this shadow feeler. This method is VisibilityTester::Unoccluded()
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
: shooting rays is the most expensive task in a ray tracer.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
Whitted ray tracing surface integrator
During this tutorial you will write a pbrt Surface Integrator for Whitted
read carefully Appendix A to understand how to write plug-ins and examine the examples
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
dows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
ray direction, ������� � �� � cos
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
s cast shadows onto each others. The returned radiance is
� � �� � cos �����
stands for visibility between the intersection point
urface. This function is evaluated by casting a ray and returns either 1 or 0.
method returns a visibility tester that can be used to
VisibilityTester::Unoccluded()
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
: shooting rays is the most expensive task in a ray tracer.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
Whitted ray tracing surface integrator
During this tutorial you will write a pbrt Surface Integrator for Whitted style ray tracing. Please
ins and examine the examples
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
dows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
cos ����� , !������"
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
s cast shadows onto each others. The returned radiance is
�� , !������" � #�$,
stands for visibility between the intersection point p and a point at the i
urface. This function is evaluated by casting a ray and returns either 1 or 0.
method returns a visibility tester that can be used to
VisibilityTester::Unoccluded()
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
: shooting rays is the most expensive task in a ray tracer.
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
style ray tracing. Please
ins and examine the examples
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
dows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
"
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
s cast shadows onto each others. The returned radiance is
, ��"
and a point at the ith
urface. This function is evaluated by casting a ray and returns either 1 or 0.
method returns a visibility tester that can be used to
VisibilityTester::Unoccluded(). It takes
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
: shooting rays is the most expensive task in a ray tracer. Below are the
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
style ray tracing. Please
ins and examine the examples
presented there. These surface integrators (flat, depth, DirectNoShadows) are distributed with
dows Surface Integrator and will incrementally add
Remember that this integrator does not shoot shadow rays. It uses the following expression to
The DirectShadows integrator evaluates the reflected radiance at the intersection point due to
from the light sources), but taking into consideration occlusions, i.e., it
s cast shadows onto each others. The returned radiance is
th light
method returns a visibility tester that can be used to
. It takes
as a parameter and returns a Boolean: true if the light source is visible, false if it is
unoccluded. Add this call to the DirectNoShadows, selecting carefully where to call this
Below are the
results obtained with 1 and 64 primary rays per pixel, with rendering times of 2 and 126.8
Whitted integrator
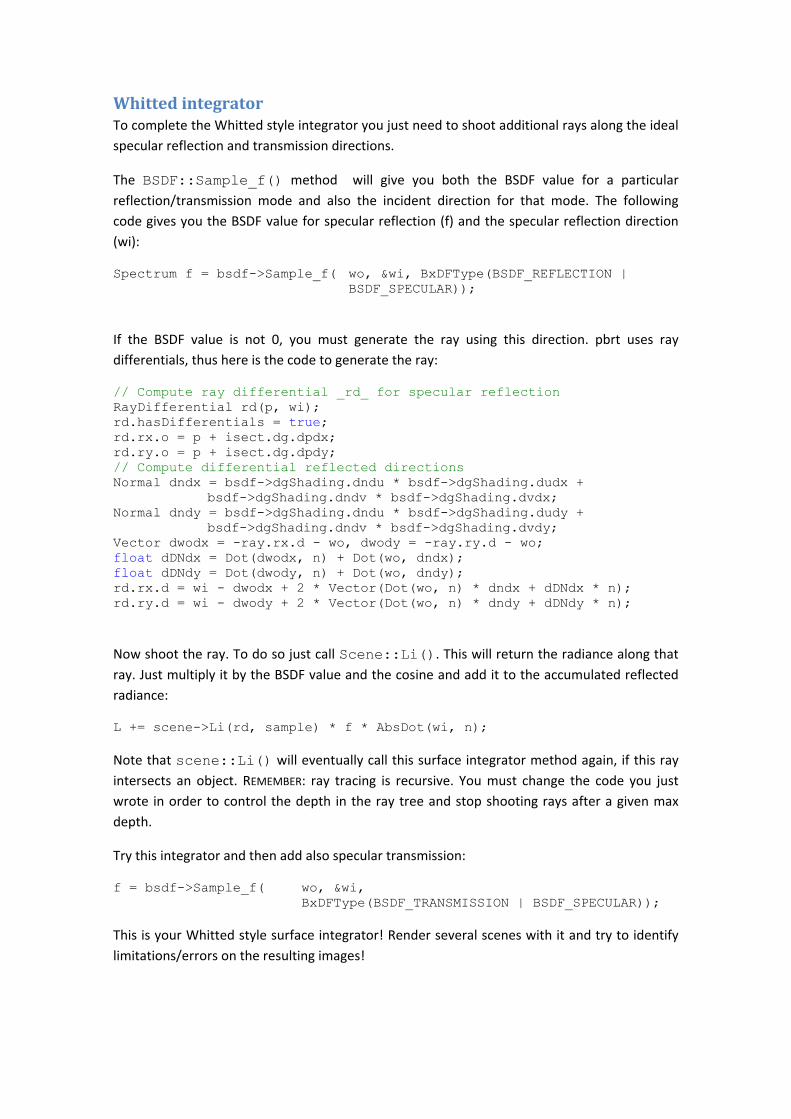
To complete the Whitted style integrator you just need to shoot additional rays along the ideal
specular reflection and transmission directions.
The BSDF::Sample_f() method will give you both the BSDF value for a particular
reflection/transmission mode and also the incident direction for that mode. The following
code gives you the BSDF value for specular reflection (f) and the specular reflection direction
(wi):
Spectrum f = bsdf->Sample_f( wo, &wi, BxDFType(BSDF_REFLECTION | BSDF_SPECULAR));
If the BSDF value is not 0, you must generate the ray using this direction. pbrt uses ray
differentials, thus here is the code to generate the ray:
// Compute ray differential _rd_ for specular reflection RayDifferential rd(p, wi); rd.hasDifferentials = true; rd.rx.o = p + isect.dg.dpdx; rd.ry.o = p + isect.dg.dpdy; // Compute differential reflected directions Normal dndx = bsdf->dgShading.dndu * bsdf->dgShading.dudx + bsdf->dgShading.dndv * bsdf->dgShading.dvdx; Normal dndy = bsdf->dgShading.dndu * bsdf->dgShading.dudy + bsdf->dgShading.dndv * bsdf->dgShading.dvdy; Vector dwodx = -ray.rx.d - wo, dwody = -ray.ry.d - wo; float dDNdx = Dot(dwodx, n) + Dot(wo, dndx); float dDNdy = Dot(dwody, n) + Dot(wo, dndy); rd.rx.d = wi - dwodx + 2 * Vector(Dot(wo, n) * dndx + dDNdx * n); rd.ry.d = wi - dwody + 2 * Vector(Dot(wo, n) * dndy + dDNdy * n);
Now shoot the ray. To do so just call Scene::Li(). This will return the radiance along that
ray. Just multiply it by the BSDF value and the cosine and add it to the accumulated reflected
radiance:
L += scene->Li(rd, sample) * f * AbsDot(wi, n);
Note that scene::Li() will eventually call this surface integrator method again, if this ray
intersects an object. REMEMBER: ray tracing is recursive. You must change the code you just
wrote in order to control the depth in the ray tree and stop shooting rays after a given max
depth.
Try this integrator and then add also specular transmission:
f = bsdf->Sample_f( wo, &wi, BxDFType(BSDF_TRANSMISSION | BSDF_SPECULAR));
This is your Whitted style surface integrator! Render several scenes with it and try to identify
limitations/errors on the resulting images!

NOTE:
This Whitted style integrator presents some noise in shadows. A completely deterministic
integrator should not present noise.
Noise appears because the method Lights::Sample_L() randomly selects the sample point over
the light source surface area. Does shadow rays are being shot towards different points on the
light sources and this is perceived as noise. There is another form of this method which allows
deterministic sampling of the light sources. Change the following line
Spectrum Li = scene->lights[i]->Sample_L(p, &wi, &visibility);
to
Spectrum Li = scene->lights[i]->Sample_L(p, 0.5, 0.5, &wi, &pdf,
&visibility);
Declare a float variable named pdf and also change
L += f * Li * AbsDot(wi, n);
to
L += f * Li / pdf * AbsDot(wi, n);
Now your Whitted style integrator is fully deterministic and the resulting image will present
aliasing (e.g., jagged edges in the shadows boundaries) rather than noise.
Tutorial 4 – Sampling the image plane and light sources
The efficiency (execution time) and amount of noise (variance) associated with a given
rendering algorithm depend on the sampling distribution and density used.
Throughout this tutorial you will try different sampling distributions and densities for both the
image plane and area light sources in order to get an insight on how these relate to execution
time and noise.
Open the cornell box file and make sure you are using Mitchell filter, the stratified sampler
with jittering on and the direct lighting surface integrator:
PixelFilter "mitchell" "float xwidth" [2] "float ywidth" [2]
SurfaceIntegrator "directlighting"
Sampler "stratified" "bool jitter" ["true"] "integer xsamples" [1] "integer
ysamples" [1]
The area of Mitchell filter is 4 and we are requesting one sample per pixel (spp) using a
stratified jittered distribution.
When you specify and area light you can also specify how many shadow rays should be shot to
sample that light source (although it is the surface integrator responsibility to respect this or
not – direct lighting does). The parameter nsamples indicates precisely this, i.e, samples per
light source (spl).
AreaLightSource "area"
"color L" [25 25 25]
"integer nsamples" [1]
Now that you know how to set these parameters fill in the following table with the execution
time, in seconds, for all the possible 9 combination shown below. Give different names to the
image files, such that you can later compare them. For instance, for 1 spp and 1 spl call the file
cornellP1L1.exr, while for 4 spp and 9 spl call it cornellP4L9.exr. You can control the filename
with the filename parameter of the Film component in the scene file.
Rendering times in seconds Area Light Source (spl)
1 4 9
Stratified
(spp)
1
4
9
Note that, specular reflections and transmissions ignored, with 1 spp and 4 spl pbrt has to
shoot 5 rays per pixel (1 primary+4 shadows). With 4 spp and 1 spl it has to shoot 8 rays per
pixel (4 primary+4shadows). With 9 spp and 9 spl pbrt shoots 9 primary rays per pixel and 9
shadow rays per primary ray totaling 90 rays per pixel.
Comparing the subjective quality of the final images and the respective rendering times try to
answer these questions:
1. Which gives the best result: 1 spp x 9 spl or 9 spp x 1 spl? Why? Remember to compare
both the quality of the direct lighting (shadows) and the noise in the objects’ edges.
2. If you had to weight subjective image quality and objective execution time which
combination of spp x spl would you use? Why?
Recently sampling distributions based on quasi-random numbers sequences, rather than
pseudo-random sequences, have been used to sample multi dimensions of the rendring
problem. pbrt includes one such sampler: low discrepancy. Render an image with 4 spp and 1
spl using this sampler and compare both execution time and subjective quality with those
obtained with stratified jittering, by filling the table below (NOTE: the difference in subjective
quality might be more apparent if you use 16 spp and 1 spl – it takes a bit longer, though).
Indicate to pbrt core that it must use low discrepancy by selecting the appropriate sampler:
Sampler "lowdiscrepancy" "integer pixelsamples" [4]
Stratified Low discrepancy
Execution time (secs)
Subjective Quality
Which would you recommend?

Tutorial 5 – Monte Carlo Rendering
Download the code for the path tutorial integrator, add it as a new project to the pbrt Solution
and build the new integrator.
Study the code carefully. Notice that it first evaluates the ray intersection with the scene:
scene->Intersect(ray, &isect)
then evaluates direct lighting followed by indirect lighting.
Direct lighting is evaluated by sampling all light sources. A random position is selected on the
surface of each light source:
Spectrum Li = scene->lights[i]->Sample_L(p, &wi, &visibility);
and then this light contribution is added to the reflected radiance, if the light source is visible
from the shading point:
if (!f.Black() && visibility.Unoccluded(scene)) Lr += f * Li * AbsDot(wi, n);
Indirect lighting is then evaluated if the maximum length of the random walk has not been
reached (depth of the recursive algorithm). A random direction over the sphere is requested:
Spectrum f = bsdf->Sample_f(wo, &wi, BSDF_ALL, &flags);
The ray differential is built and a new ray is shot along this direction and added to the reflected
radiance:
depth++; Lr += scene->Li(rd, sample) * f * AbsDot(wi, n); depth--;
Change the cornell box scene description file to use this surface integrator and request a
single sample per pixel:
Sampler "bestcandidate" "integer pixelsamples" [1]
SurfaceIntegrator "path_tutorial"
Render the image, visualize it and write down the rendering time and number of shadow rays
traced. What are the causes of noise (variance) seen on this image?
Direct Lighting
This integrator is sampling all light sources for each intersection with the scene geometry (note
that the Cornell box has various light sources, since the lamp in the ceiling is described by
multiple triangle meshes, each representing a different light source).

In a scene with many light sources, evaluating them all for each point being shaded might not
be desirable, since this requires many shadow rays. What the integrator does is to add the
contributions of all the light sources to compute the total direct lighting. Each light source can
be seen as a different function, ���%", and we want to compute the expected value of the sum
of all these functions: &[∑ ���(")*�+, ], . being the number of light sources.
Monte Carlo integration allows us to avoid sampling all light sources. If we randomly select
one of them, with uniform probability $��" � ,)*
, then we can evaluate this single light source,
divide its contribution by the probability of selecting it (or multiply by the number of light
sources) and still get a correct result in average.
Change your code to do exactly this. Select the light source using:
int NumLights = scene->lights.size(); int l = Floor2Int(RandomFloat()* NumLights); l = min(l, NumLights-1);
and then do not forget to multiply its contribution by NumLights:
Lr += f * Li * AbsDot(wi, n) * ((float)NumLights);
Render the image, visualize it and compare it with the one from the previous section.
Comment the variance in the image, rendering time and number of shadow rays traced.
Additional Material
The previous exercise asked you to select a single light source with uniform probability,
$��" � ,)*
. This distribution does not use any information about the light sources total power
or position. Alternatively, a probability distribution might be built using information about
these quantities, does doing direct light importance sampling.
You can:
1. Build a probability distribution based on the light sources radiant power, with each
light source probability being $���" � !/012�34"∑ !/012�35"6*
578.
The power of each light source is given by pbrt:
Spectrum power = light->Power(scene);
2. A better distribution might be based on the solid angle subtended by each light source
when seen from p. This distribution, however, has to be build for each point p.
Remember that the solid angle is given by 9 � :; <=> ?;2@ .
Indirect Lighting
This path tracer always stops its random walk after a fixed number of intersections (parameter
maxdepth). This results in a biased estimation of the integral.

An unbiased alternative is to use Russian Roulette. An absorption (or termination) probability,
q, is given as a parameter. Before shooting a new secondary ray a random number in the
interval [0..1[ is taken. If this number is larger than q, then the secondary ray is shot; if it is less
it is not shot. The contribution of those rays that are shot must be weighted by a factor
1 �1 − C"⁄ to account for the rays that were not spawned.
Change this integrator such that it accepts a new float parameter, absorption. If this
parameter, whose default value should be 0, is different from 0, then Russian Roulette is used
instead of deterministic termination.
Render the cornell box for different values of q and compare both noise, rendering time and
number of triangle ray intersections.
To have a good idea about the rendering capabilities and computing power demands of path
tracing run a few images with different numbers of samples per pixel:
Sampler "bestcandidate" "integer pixelsamples" [4]
With path tracing the random walk at each intersection point continues along a single
direction. Alternatively, Monte Carlo ray tracing selects N directions at each intersection point.
The contribution of each of them is integrated using the Monte Carlo estimator:
��EF�$ → 92" ≈ 1 �1 − C" � �2�$, 92 , 9�"��EF�$ ← 9�" cos J�
$�9�")
�+,
Change your integrator such that it accepts a new integer parameter, split, which indicates
the split number at each intersection, i.e., the number of secondary rays to shoot at each
intersection. Its default value must be 1, corresponding to the path tracing case.
Render an image of the Cornell Box with split=2. Comment on noise and execution time.

Tutorial 6 – Irradiance Cache
The irradiance cache (IC) surface integrator distributed with pbrt does direct lighting using a
Monte Carlo integrator for all the light sources, follows specular transmission and reflection
paths by spawning a ray for each of these components and then evaluates indirect diffuse
lighting by using the irradiance cache. Cosine weighted importance sampling is used to sample
the hemisphere, although not stratified as suggested on Greg Ward’s original paper.
The integrator accepts the following main parameters:
Parameter Description Default
maxerror Maximum error estimate for
accepting a sample for interpolation
0.2
nsamples Number of directions (rays) used to
evaluate irradiance
4096
These parameters strongly influence both image quality and rendering time. In general,
smaller acceptable error results in more irradiance samples and, thus, larger execution time.
Increasing the number of directions to evaluate irradiance results in a better estimate of
irradiance, but also increases execution time. Remember, however, that this being a biased
method, increasing the number of samples does not guarantee a convergence to the correct
result.
Using the Cornell Box, fill the table below for the proposed different combinations of these
parameters. For each of them register execution time, number of irradiance estimates
(samples) computed and your own subjective ordering of image quality.
You can set the parameters by writing:
SurfaceIntegrator "irradiancecache" "integer nsamples" [512] "float maxerror" [0.2]
Make sure that only a single sample per pixel is taken:
Sampler "bestcandidate" "integer pixelsamples" [1]
maxerror
0.5 0.2 0.1
nsamples
512
2048
Sample Placement Visualization
Visualizing where, on 3D space, IC samples are placed helps in creating insight about how the
algorithm works with respect to the scene being rendered and what its requirements are.
Change the IC integrator such that whenever an IC sample has to be extensively calculated, the
corresponding pixel is set to a particular color (e.g black=(0.,0.,0.)).
SUGGESTION: locate the code sequence where IC values are evaluated and, if a sample is
evaluated, change the returned radiance value to the selected color. Make sure that the
sample is still evaluated and added to the cache, otherwise other pixels values will also be
affected.
Render the Cornell Box with the modified integrator and answer the following questions:
Q1.: Characterize the regions where samples tend to concentrate. What about those where
they tend to be more sparse?
Q2.: If you render the same scene with different values of the “nsamples” parameter, can you
notice any difference on the samples placement pattern? Why?
Q3.: If you render the same scene with different values of the “maxerror” parameter, can you
notice any difference on the samples placement pattern? Why?
Pre-process: cache warm-up
The Irradiance Cache algorithm suffers from a rendering order problem that results on many
visible artifacts on the final image.
The image is rendered in scanline order, one pixel at a time, starting from one corner,
processing that line and continuing to the next. Since the cache is initially empty, IC samples
end up being calculated in scanline order too; consequently, there are many extrapolations (a
single sample being used to estimate irradiance at another location) and there is never
information about irradiance on regions of the image that haven’t been processed yet. Many
of the artifacts you can see on the final image result from this problem.
A possible solution would be to do a first pass over the image plane, at a lower resolution
(sampling rate), and evaluate IC samples whenever required. These samples would be stored
on the cache and used on the second pass, done at full resolution. This pass would use samples
distributed all over the visible 3D volume, thus avoiding the extrapolations resulting from
scanline order IC calculation. Note that even if actual pixel values calculated on the first pass
are discarded and recomputed on the second pass, this will not, eventually, represent a
significant penalty since IC evaluation takes most of the rendering time.
Use the PreProcess() method to do this first pass at a lower resolution.
SUGGESTION: add a new parameter determining how many pixels (primary rays) should be
evaluated on this first pass. Its default value should be zero, resulting on a single pass
rendering.
Compare image quality, rendering time and number of IC samples evaluated between the two
pass approach and the single pass approach.

Tutorial 7 – Interactive Global Illumination
The interactive global illumination integrator performs a preprocess step, where particles
carrying radiant flux are propagated from the light sources into the scene. Whenever the path
of these light particles intersects geometry with a diffuse material a virtual point light source
(VPL) is created.
In rendering time all these VPLs are sampled with a shadow ray, contributing to the point
illumination if visible. Indirect diffuse lighting is thus included on the integral. The number of
light paths traced from the light sources is determined by the nlights integer parameter;
the number of VPLs is usually larger, since each light path can originate more than one VPL.
If the same set of VPLs is used for all pixels, then neighboring pixels are highly intercorrelated.
Different sets of VPLs, each with nlights light paths can be created. The set to use for each
pixel is determined stochastically, thus resulting in a noisier image, which is visually more
acceptable. The number of sets to generate is given by the nsets integer parameter.
Note that this approach does not increase rendering time, since the number of VPLs to sample
per pixel is the same as before. Preprocessing time will increase, since more VPLs have to be
generated. However, the number of VPLs is usually low, thus preprocessing time is a very small
fraction of total execution time.
An even better approach is to sample each pixel with several primary rays, thus reducing
aliasing, and use a different set of VPLs per primary ray. Each set can have a number of light
paths equal to the number of light paths we want to use per pixel divided by the number of
sets.
Using the Indirect Cornell Box scene, render it with a sample per pixel, 64 light samples and a
single set of VPLs:
Sampler "lowdiscrepancy" "integer pixelsamples" [1]
SurfaceIntegrator "igi" "integer nlights" [64] "integer nsets" [1]
Now render it again but using 4 sets instead. Different pixels will use different sets of VPLs,
thus decreasing intercorrelation:
Sampler "lowdiscrepancy" "integer pixelsamples" [1]
SurfaceIntegrator "igi" "integer nlights" [64] "integer nsets" [4]
Compare the quality of both images and respective rendering time.
Render the image again, but using 4 samples per pixel. The number of VPLs samples per pixel
can be kept constant by reducing the number of VPLs per set (64/4=16):
Sampler "lowdiscrepancy" "integer pixelsamples" [4]
SurfaceIntegrator "igi" "integer nlights" [16] "integer nsets" [4]
Compare this image quality and rendering time with the previous one and justify why
rendering time has increased.

The igi surface integrator distributed with pbrt evaluates direct lighting in the usual way,
i.e., by sampling the light sources directly. A variation would be to consider the starting point
of each light path as a VPL too – note that these VPLs would be on the light source surface.
Instead of explicitly evaluating direct lighting, this would be evaluated by sampling these
additional VPLs.
Change the igi surface integrator to include this modification.
The PreProcess() method has to be changed to add the VPLs on the light sources surfaces
to each VPL set. The Li() method has to be changed, such that it no longer samples the light
sources directly – this will be done by evaluating the new VPLs.
Compare both image quality and rendering time.
Additional Material
The igi integrator randomly selects light sources from the whole set of light sources present
in the model (even if some importance sampling based on the lights relative radiant powers is
used).
In highly occluded environments most light sources do not contribute for the illumination of
visible objects. Consider for example a building with many rooms and many light sources per
room. If the observer is inside a room the vast majority of light sources on other rooms do not
contribute to this room illumination. Shooting VPLs from these other light sources and
sampling them in rendering time is thus a waste of computational power. Furthermore, since
the number of light paths is often less than the total number of light sources and since the
light sources where these light paths start are selected randomly, it may happen that no light
path start on the observer’s room and, thus, no VPLs are inside this room.
This problem can be alleviated if the light sources which are important for the current view
point are previously identified. If this can be done on a preprocessing stage, then all light
sources that do not contribute for the current view point can be given an importance equal to
zero, and won’t be selected as the starting point for the VPL propagation paths.
Note: for the method to be unbiased, it must be guaranteed that any light source that
contributes to the current view point is given an importance different from 0.
In [Wald, Benthin, Slusallek; “Interactive Global Illumination in Complex and Highly Occluded
Environments”; EG Symposium on Rendering, 2003] it is suggested that a low resolution pass
over the image plane is done using path tracing. By counting the number of hits each light
source gets from shadow rays, their relative importance can be computed. Note however that
this not guarantees that all important light sources are accounted for. To avoid bias a residual
importance can be assigned to all light sources, although this might result in starting light
paths from unimportant ones.
Change the PreProcess() method to implement this method and use it to render the
Indirect Cornell Box scene. Compare both image quality and rendering time with the original
igi integrator for the same parameterization.

Appendix A – Foundations for writing Surface Integrators plug-ins
Generic structure
Locating and identifying the plug-ins
pbrt looks for plug-ins at run time in the directories specified either by the environment
variable PBRT_SEARCHPATH or in the scene description file by the statement SearchPath.
Multiple directories might be specified by separating them by colons or semi-colons according
to the particular operating system syntax.
Which particular plug-ins to use for each scene, together with their parameters, is specified in
the description file, on the overall rendering options region. There is a default plug-in for each
type as well as their respective default values. The following scene description excerpt is an
example of how to specify the camera and pixel filter plug-ins and respective parameters. For
further details please see Appendix C of (Pharr & Humphreys, 2004).
Camera "perspective" "float fov" [30] PixelFilter "mitchell" "float xwidth" [2] "float ywidth" [2]
Table 3 - plug-ins specification in scene description
Methods
The C file defining a plug-in must contain the plug-in class and a method for its creation.This
method is entitled Create<Plug-In Type>() and receives as a parameter a ParamSet,
which will contain the plug-in parameters’ values as given on the scene description file. If the
parameters haven’t been specified on the description file, then this method will set their
default values. It then creates the object by allocating it. This method is called by the pbrt core,
upon loading the plug-ins.
The table below presents two examples of the creator method for a tone map operator and a
surface integrator.
Non Linear Tone Map Operator
extern "C" DLLEXPORT ToneMap *CreateToneMap(const ParamSet &ps) { float maxy = ps.FindOneFloat("maxY", 0.f); return new NonLinearOp(maxy); }
This operator has a single float parameter whose default value is 0.0
Surface Integrator
extern "C" DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(const ParamSet ¶ms) { int maxDepth = params.FindOneInt("maxdepth", 5); return new ConstantIntegrator(maxDepth); }
This integrator has a single integer parameter whose default value is 5 Table 4 - Creation methods for plug-ins
The plug-in class must make available the object constructor and the particular plug-in
methods. Which methods each plug-in must implement depends on the plug-in class. A
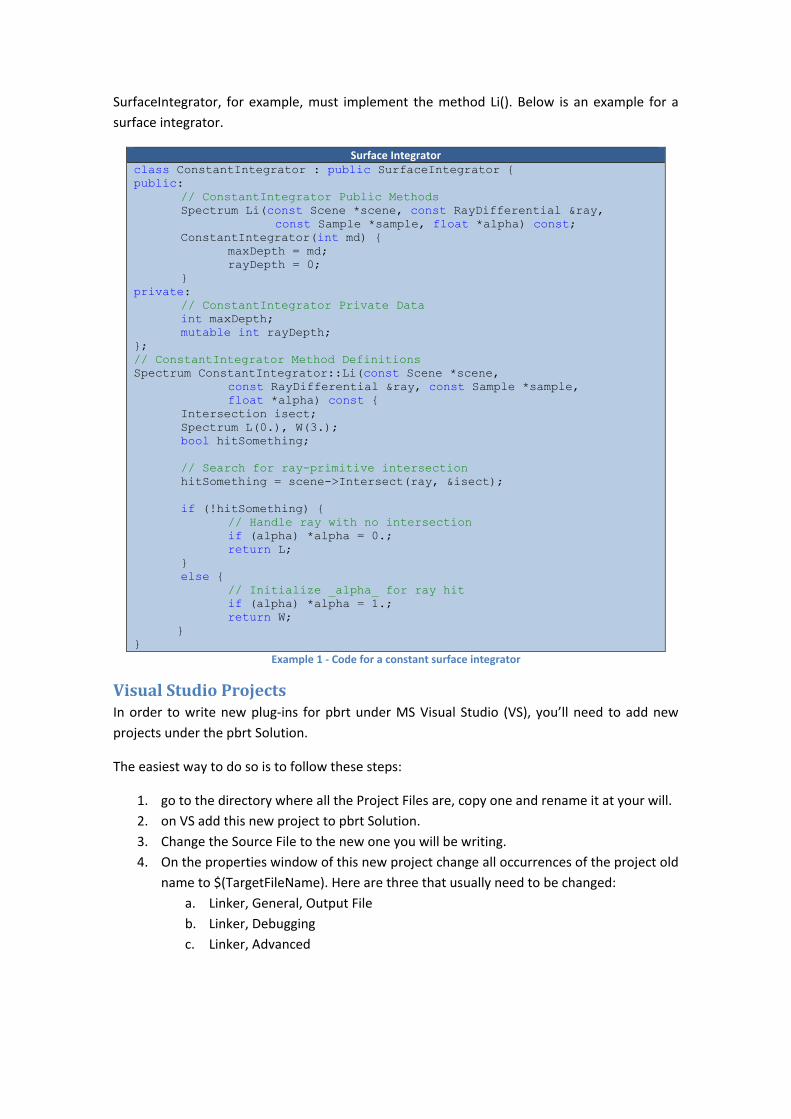
SurfaceIntegrator, for example, must implement the method Li(). Below is an example for a
surface integrator.
Surface Integrator
class ConstantIntegrator : public SurfaceIntegrator { public: // ConstantIntegrator Public Methods Spectrum Li(const Scene *scene, const RayDifferential &ray, const Sample *sample, float *alpha) const; ConstantIntegrator(int md) { maxDepth = md; rayDepth = 0; } private: // ConstantIntegrator Private Data int maxDepth; mutable int rayDepth; }; // ConstantIntegrator Method Definitions Spectrum ConstantIntegrator::Li(const Scene *scene, const RayDifferential &ray, const Sample *sample, float *alpha) const { Intersection isect; Spectrum L(0.), W(3.); bool hitSomething; // Search for ray-primitive intersection hitSomething = scene->Intersect(ray, &isect); if (!hitSomething) { // Handle ray with no intersection if (alpha) *alpha = 0.; return L; } else { // Initialize _alpha_ for ray hit if (alpha) *alpha = 1.; return W; } }
Example 1 - Code for a constant surface integrator
Visual Studio Projects
In order to write new plug-ins for pbrt under MS Visual Studio (VS), you’ll need to add new
projects under the pbrt Solution.
The easiest way to do so is to follow these steps:
1. go to the directory where all the Project Files are, copy one and rename it at your will.
2. on VS add this new project to pbrt Solution.
3. Change the Source File to the new one you will be writing.
4. On the properties window of this new project change all occurrences of the project old
name to $(TargetFileName). Here are three that usually need to be changed:
a. Linker, General, Output File
b. Linker, Debugging
c. Linker, Advanced

Surface Integrator Plug-Ins
Surface integrators compute radiance scattered from a surface along an outgoing direction.
They are responsible for evaluating the integral equation that describes the equilibrium
distribution of radiance in an environment – the rendering equation. The surface integral will
determine which light paths are traced through the environment.
The key method that every surface integrator must provide is Integrator::Li(). This method
receives as parameters the scene, a ray differential, a sample and a float, alpha, which is a
reference parameter used to return the value of alpha (0 for transparent .. 1 completely
opaque). It returns the spectral radiance along the given ray.
Spectrum Integrator::Li (const Scene *scene, const RayDifferential &ray, const Sample
*sample, float *alpha) const;
Table 5 - Integrator ::Li() signature method
Some methods and attributes from other classes are essential to write a surface integrator.
Below is a brief description of some of these.
// Search for ray-primitive intersection bool Scene::Intersect(const Ray &ray, Intersection *isect) const;
This method searches for an intersection between the given ray and the scene. It
returns a Boolean indicating whether some object is intersected. The Intersection
parameter will hold information regarding the intersection object and point.
• BSDF *isect.GetBSDF(Ray) – pointer to the BSDF at the intersection point
• Point isect.GetBSDF(Ray)->dgShading.p – intersection point
• Normal isect.GetBSDF(Ray)->dgShading.nn – normal at p
• Spectrum isect.GetBSDF(Ray)->f(wo, wi) – Value for the BSDF at the
intersection point for the incident (wi) and outgoing (wo) directions pair
• Spectrum isect.Le (-ray.d) – auto emitted radiance along ray direction
• float ray.maxt – intersection distance // Light sources
• int Scene::lights.size() – number of light sources
• Spectrum Light->Le(ray) – radiance emitted along the ray direction by
infinitely far away light sources that surround the entire scene
• Spectrum Light::Sample_L(const Point &p, Vector *wi, VisibilityTester *vis) const = 0;
This is the key method to evaluate radiance emitted by a particular light source
towards a particular point p. The caller passes the world space position of a point in
the scene and the light returns the radiance arriving at that point assuming there
are no object occluding them. The Light initializes the incident direction towards
the light source wi and the VisibilityTester which holds information about
the shadow ray that can be used to test whether the light is occluded. For area
lights a point on the light surface is stochastically selected. // Visibility Tester for light sources
• bool VisibilityTester:: Unoccluded (scene) – traces the shadow ray and
returns true if the light source is unoccluded Table 6 - Useful methods to write a surface integrator

Example: Depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
origin):
This distance is given by
#include#include#include// Depth Declarationsclasspublic private };// Depth Method DefinitionsSpectrum Depth::Li( } externParamSet ¶ms){ }
Example: Depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
origin): � � KLMNOPQRThis distance is given by
#include "pbrt.h"#include "transport.h"#include "scene.h"// Depth Declarationsclass Depth : public:
// DepthSpectrum Li( Depth(}
private: // Depth Private Data
}; // Depth Method DefinitionsSpectrum Depth::Li(
Intersection isect;Spectrum L(0.);bool
// Search for rayhitSomething = scene
if (!hitSomething) { } else }
extern "C" DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(ParamSet ¶ms)
return
Example: Depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
KLMNOPQR �SOTThis distance is given by ray.maxt
"pbrt.h" "transport.h""scene.h"
// Depth Declarations Depth : public SurfaceIntegrator {
// Depth Public MethodsSpectrum Li(const
constDepth(void) {
// Depth Private Data
// Depth Method DefinitionsSpectrum Depth::Li(const
const RayDifferential &ray, float *alpha)
Intersection isect;Spectrum L(0.);
hitSomething;
// Search for rayhitSomething = scene
(!hitSomething) {// Handle ray if (alpha) *alpha = 0.;return L;
{ // Initialize _alpha_ for ray hitif (alpha) *alpha = 1.;L = (ray.maxt, ray.maxt, ray.maxt);return L;
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(ParamSet ¶ms)
return new Depth();
Figure
Example: Depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
SOT. VSLWLP, $"ray.maxt. The integrator returns 0 if no intersection is found.
Depth Surface Integrator
"transport.h"
SurfaceIntegrator {
Public Methods const Scene *scene, const Sample *sample,
// Depth Private Data
// Depth Method Definitions const Scene *scene,RayDifferential &ray, *alpha) const
Intersection isect; Spectrum L(0.);
hitSomething;
// Search for ray-primitive intersectionhitSomething = scene->Intersect(ray, &isect);
(!hitSomething) { // Handle ray with no intersection
(alpha) *alpha = 0.;L;
// Initialize _alpha_ for ray hit(alpha) *alpha = 1.;
L = (ray.maxt, ray.maxt, ray.maxt);L;
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(
Depth();
Example 2 - Depth Surface Integrator code
Figure 1 - cornell box with depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
"
. The integrator returns 0 if no intersection is found.
Depth Surface Integrator
SurfaceIntegrator {
Scene *scene, constSample *sample,
Scene *scene, RayDifferential &ray, const
const {
primitive intersection>Intersect(ray, &isect);
with no intersection(alpha) *alpha = 0.;
// Initialize _alpha_ for ray hit(alpha) *alpha = 1.;
L = (ray.maxt, ray.maxt, ray.maxt);
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(
Depth Surface Integrator code
cornell box with depth integrator
The Depth integrator returns the depth of the intersection point p (distance to primary ray
. The integrator returns 0 if no intersection is found.
Depth Surface Integrator
const RayDifferential &ray,Sample *sample, float *alpha)
const Sample *sample,
primitive intersection >Intersect(ray, &isect);
with no intersection
// Initialize _alpha_ for ray hit
L = (ray.maxt, ray.maxt, ray.maxt);
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(
Depth Surface Integrator code
cornell box with depth integrator (T=0.5 secs)
The Depth integrator returns the depth of the intersection point p (distance to primary ray
. The integrator returns 0 if no intersection is found.
RayDifferential &ray,*alpha) const;
Sample *sample,
>Intersect(ray, &isect);
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(
Depth Surface Integrator code
(T=0.5 secs)
The Depth integrator returns the depth of the intersection point p (distance to primary ray
. The integrator returns 0 if no intersection is found.
RayDifferential &ray, ;
Sample *sample,
DLLEXPORT SurfaceIntegrator *CreateSurfaceIntegrator(const
The Depth integrator returns the depth of the intersection point p (distance to primary ray

Example:
The Flat integrator returns the
normal of the intersected surface at the intersection point p:
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
will be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
normal.
Spectrum Flat::Li( point }
Example: Flat integrator
The Flat integrator returns the
normal of the intersected surface at the intersection point p:
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
normal.
Spectrum Flat::Li( Intersection isect;Spectrum L(0.), W(3.);bool
// Search for rayhitSomething = scene
if (!hitSomething) { } else
point }
Flat integrator
The Flat integrator returns the
normal of the intersected surface at the intersection point p:
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Spectrum Flat::Li(constconst RayDifferential &ray, float *alpha)
Intersection isect;Spectrum L(0.), W(3.);
hitSomething;
// Search for rayhitSomething = scene
(!hitSomething) {// Handle ray with no intersectionif (alpha) *alpha = 0.;return L;
{ // Initialize _alpha_ for ray hitif (alpha) *alpha = 1.;// Compute emitted and reflected light at ray intersection
// Evaluate BSDF at hit pointBSDF *bsdf = isect.GetBSDF(ray);// Initialize common variables for Whitted integratorconst Point &p = bsdfconst Normal &n = bsdfVector wo = Vector wi; // Compute emitted light if ray hit an area light sourceL += isect.Le(wo);wi = Vector (// get bsdf for this pair of directionsSpectrum f = bsdfL += f; return L;
Figure
The Flat integrator returns the BSDF for the pair of directions given by the primary ray and the
normal of the intersected surface at the intersection point p:
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Flat Surface Integrator
const Scene *scene,RayDifferential &ray, *alpha) const
Intersection isect; Spectrum L(0.), W(3.);
hitSomething;
// Search for ray-primitive intersectionhitSomething = scene->Intersect(ray, &isect);
(!hitSomething) { // Handle ray with no intersection
(alpha) *alpha = 0.;L;
// Initialize _alpha_ for ray hit(alpha) *alpha = 1.;
// Compute emitted and reflected light at ray intersection
// Evaluate BSDF at hit point*bsdf = isect.GetBSDF(ray);
// Initialize common variables for Whitted integratorPoint &p = bsdfNormal &n = bsdf
Vector wo = -ray.d; i; // incident direction
// Compute emitted light if ray hit an area light sourceL += isect.Le(wo); wi = Vector (-n); // get bsdf for this pair of directionsSpectrum f = bsdf->f(wo, wi);
L;
Example 3 - Flat Surface Integrator code
Figure 2 - cornell box with flat integrator (T=0.8 secs)
BSDF for the pair of directions given by the primary ray and the
normal of the intersected surface at the intersection point p:
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Flat Surface Integrator
Scene *scene, RayDifferential &ray, const
const {
primitive intersection>Intersect(ray, &isect);
// Handle ray with no intersection(alpha) *alpha = 0.;
// Initialize _alpha_ for ray hit(alpha) *alpha = 1.;
// Compute emitted and reflected light at ray intersection
// Evaluate BSDF at hit point*bsdf = isect.GetBSDF(ray);
// Initialize common variables for Whitted integratorPoint &p = bsdf->dgShading.p; Normal &n = bsdf->dgShading.nn;
ray.d; // outgoing direction // incident direction
// Compute emitted light if ray hit an area light source
// get bsdf for this pair of directions>f(wo, wi);
Flat Surface Integrator code
cornell box with flat integrator (T=0.8 secs)
BSDF for the pair of directions given by the primary ray and the
normal of the intersected surface at the intersection point p: � �
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Flat Surface Integrator
const Sample *sample,
primitive intersection >Intersect(ray, &isect);
// Handle ray with no intersection
// Initialize _alpha_ for ray hit
// Compute emitted and reflected light at ray intersection
// Evaluate BSDF at hit point *bsdf = isect.GetBSDF(ray);
// Initialize common variables for Whitted integrator>dgShading.p; // intersection point>dgShading.nn; // normal at p// outgoing direction
// incident direction // Compute emitted light if ray hit an area light source
// get bsdf for this pair of directions>f(wo, wi);
Flat Surface Integrator code
cornell box with flat integrator (T=0.8 secs)
BSDF for the pair of directions given by the primary ray and the
� ��−ray.direction
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Sample *sample,
>Intersect(ray, &isect);
// Compute emitted and reflected light at ray intersection
// Initialize common variables for Whitted integrator// intersection point// normal at p
// outgoing direction
// Compute emitted light if ray hit an area light source
// get bsdf for this pair of directions
cornell box with flat integrator (T=0.8 secs)
BSDF for the pair of directions given by the primary ray and the
direction, ���!"
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
Sample *sample,
// Compute emitted and reflected light at ray intersection
// Initialize common variables for Whitted integrator // intersection point // normal at p
// Compute emitted light if ray hit an area light source
BSDF for the pair of directions given by the primary ray and the
This does not depend on the light sources. For perfect diffuse surfaces the returned radiance
be different from zero for all possible ray directions; for perfect specular surfaces the
returned radiance will only be different from zero if the ray direction is coincident with the
// Compute emitted and reflected light at ray intersection

Example: DirectNoShadows integrator
The DirectNoShadows integrator evaluates the reflected radiance at the intersection point due
to direct lighting (directly from the light sources) without taking into consideration occlusions,
i.e., it does not shoot shadow rays. The returned radiance is given by
� � � ��ray direction, ������� � �� � cos �����for all light sources i
, !������"
DirectNoShadows Surface Integrator
Spectrum directNoShadows::Li(const Scene *scene, const RayDifferential &ray, const Sample *sample, float *alpha) const { Intersection isect; Spectrum L(0.); bool hitSomething; // Search for ray-primitive intersection hitSomething = scene->Intersect(ray, &isect); if (!hitSomething) { // Handle ray with no intersection if (alpha) *alpha = 0.; // account for infinitely far away light sources for (u_int i = 0; i < scene->lights.size(); ++i) L += scene->lights[i]->Le(ray); if (alpha && !L.Black()) *alpha = 1.; return L; } else { // Initialize _alpha_ for ray hit if (alpha) *alpha = 1.; // Compute emitted and reflected light at ray intersection point // Evaluate BSDF at hit point BSDF *bsdf = isect.GetBSDF(ray); // Get the intersection point and the surface normal there const Point &p = bsdf->dgShading.p; // intersection point const Normal &n = bsdf->dgShading.nn; // normal at p Vector wo = -ray.d; // outgoing direction // Compute emitted light if ray hit an area light source L += isect.Le(wo); Vector wi; // incident direction // Add contribution of each light source for (u_int i = 0; i < scene->lights.size(); ++i) { VisibilityTester visibility; // Light::Sample_L() will return the incident radiance alog wi due to this particular light source // it does not check for visibility, but returns a VisibilityTester object that can later be used to do so Spectrum Li = scene->lights[i]->Sample_L(p, &wi, &visibility); if (Li.Black()) continue; // get bsdf for this pair of directions Spectrum f = bsdf->f(wo, wi); // if bsdf != 0 if (!f.Black()) // bsdf * Li * cos(wi, n) L += f * Li * AbsDot(wi, n); } return L; } }
Example 4 - DirectNoShadows surface integrator code
This surface integrator calls Light::Sample_L() to get the incident radiance at the
intersection point, p, coming directly from the light source. This method stochastically selects

a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
point
methods.
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
with the number of primary rays
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
Figure
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
point to intersection
methods.
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
with the number of primary rays
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
Figure 3 - cornell box with direct
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
intersection point. This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
with the number of primary rays
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
cornell box with direct
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
with the number of primary rays – see the images below with 4, 16 and 64 rays per pixel and
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
cornell box with direct no shadows integrator (1 rpp, T=1.2 secs)
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
the images below with 4, 16 and 64 rays per pixel and
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
no shadows integrator (1 rpp, T=1.2 secs)
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
the images below with 4, 16 and 64 rays per pixel and
6.5, 25.7 and 104 seconds rendering time, respectively.
a point in the surface of area light sources and returns both the direction from
and a visibility tester method that might be used to test if the light source is visible from
no shadows integrator (1 rpp, T=1.2 secs)
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling b
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
pixel and then integrate their contribution. However, variance is inversely proportional to the
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
the images below with 4, 16 and 64 rays per pixel and
a point in the surface of area light sources and returns both the direction from p to this point
and a visibility tester method that might be used to test if the light source is visible from p
no shadows integrator (1 rpp, T=1.2 secs)
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
always select the same point on the area light source, thus the sampling becomes
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
inversely proportional to the
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
the images below with 4, 16 and 64 rays per pixel and
to this point
p.
The image resulting from applying this integrator is full of noise. This occurs because the point
on the light sources surfaces is selected stochastically and will thus vary from intersection
This noise is the visible effect of the variance inherent to stochastic
There are several different ways to either reduce or eliminate variance. One approach is to
ecomes
deterministic and variance goes away. However, determinism has several problems, such as
aliasing, and is not a good solution. Another alternative is to shoot several primary rays per
inversely proportional to the
square root of the number of samples. This means that in order to halve variance, four times
more samples, i.e., primary rays, have to be evaluated. Unfortunately, rendering time is linear
the images below with 4, 16 and 64 rays per pixel and
Bibliographic References
Pharr, M., & Humphreys, G. (2004). Physically Based Rendering: from Theory to
Implementation. Morgan Kaufmann.
Related Documents

![chap13 light.ppt [相容模式] - 國立臺灣大學 · 2009. 11. 26. · Lights • An abstract interface for lights. • Pbrt only supports physically-based lights not based lights,](https://static.cupdf.com/doc/110x72/5fbb63a441c91b2936621b2a/chap13-lightppt-c-oecec-2009-11-26-lights-a.jpg)









