Passzív radar Seller Rudolf, Dudás Levente, Pető Tamás 1. Radarmérés alaptípusai 2. Radar elrendezések 3. Passzív radar elve 4. Passzív radar jellegzetességei 5. Passzív radar fejlődési trend

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Passzív radarSeller Rudolf, Dudás Levente, Pető Tamás
1.Radarmérés alaptípusai
2.Radar elrendezések
3.Passzív radar elve
4.Passzív radar jellegzetességei
5.Passzív radar fejlődési trend

Radarmérés alaptípusai
Aktív
• PSR (non-kooperatív)
• SSR (kooperatív)
Szemi-passzív (PET)
• Multilateráció (szemi-kooperatív)
• WAMLAT (szemi-kooperatív)
Passzív (PCL)
• Passzív radar (non-kooperatív, illuminátor szükséges)
PCL: Passive Coherent Location PET : Passive ESM Tracking ESM: Electronic Support Measures

Radarmérés alaptípusai
Mono-static
MIMO radar

Radar
Bi/multi-static
Nincs saját adó
Műsorszóró Radar, jammer
Mono-static
Saját adó
Radarok osztályozása
PSR/SSR

Radar
Bi/multi-static
Nincs saját adó
Műsorszóró Radar, jammer
Mono-static
Saját adó
Radarok osztályozása
PCL

Radar
Bi/multi-static
Nincs saját adó
Műsorszóró Radar, jammer
Mono-static
Saját adó
PCL/Parazita
Radarok osztályozása

Radarmérés alaptípusaiAktív radar, non-kooperatív
PSR
Mono-static site Bi-static site
Target
Mono-static
echo
Bi-static
echo
Előnyök
• kiforrott technológia
• non-kooperatív
• megbízhatóság
Hátrányok
• egyszerű felderíthetőség
• ECCM gyengeség
• nagy RF teljesítmény
• korlátozott minőség kis Pd kis RCS esetében

Radarmérés alaptípusaiAktív radar, kooperatív
SSR
Előnyök
• kiforrott technológia
• jó mérési pontosság
• megbízhatóság
• relatíve kis RF teljesítmény
Hátrányok
• egyszerű felderíthetőség
• ECCM nagyon gyenge
• kooperatív (transponder)
• EM terjedésre érzékeny (monopulse)

Radarmérés alaptípusaiSzemi-passzív radar, szemi-kooperatív
WAMLAT
Előnyök
• viszonylag kiforrott technológia
• megbízhatóság
• kvázi-folytonos célkövetés
• nincs saját RF sugárzás
• a radar nehezen felderíthető
Hátrányok
• multi-statikus elrendezés
• adatátviteli hálózat szükséges
• rádiócsendben repülő gép nem felderíthető

Radarmérés alaptípusaiPasszív radar
Előnyök• non-kooperatív
• kvázi-folytonos célkövetés
• nincs saját RF sugárzás
• a radar nehezen felderíthető
Hátrányok
• nem kiforrott technológia
• extrém nagy számítási kapacitás
• nagy komplexitású algoritmusok
• multi-statikus elrendezés (nem szükségszerű)
• nagy kapacitású adatátviteli hálózat szükséges• illuminátor szükséges
Different illuminators
Mono- or multi-static receivers
Data LinkProcessing Site

0,
0,
0,
0,
,
2,
1,
0,
,
2,
1,
.........
0
abs
abs
abs
abs
Nabs
abs
abs
abs
Ndiff
diff
diff
T
T
T
T
T
T
T
T
T
T
T
0
02
01
00
,
2,
1,
......
0
rtrt
rtrt
rtrt
rtrt
T
T
T
c
NNdiff
diff
diff
TDOA – Time Difference of Arrival
Wide Area MultiLATeration (WAMLAT)

Hiberboloidok metszéspontja

Mode S alapú multilateráció
13
5 p
erc
utá
nvilá
gítá
s
Hungaro
Contr
ol Z
Rt.
tá
mo
gatá
sá
va
l
http://radarlab.mht.bme.hu/~wamlat/index.html

Mérés pontossága helyfüggő
14
1 n
ap
utá
nvilá
gítá
s
htt
p:/
/ra
da
rla
b.m
ht.
bm
e.h
u/~
wa
mla
t/
Hungaro
Contr
ol Z
Rt.
tá
mo
gatá
sá
va
l

Passzív radar alapelv
Megvilágító források:
- FM
- DAB
- DVB-T
- GSM
- WiFI
- ..
2 2, , d dj f t j f t
d t ref t ref
T
f s t s t e s t s t e dt
𝑠𝑡 𝑡𝑠𝑟𝑒𝑓 𝑡
Hasonlóság mérése: skaláris szorzás

Detektált céltárgy a keresztkorrelációs függvényen
2 2, , d dj f t j f t
d t ref t ref
T
f s t s t e s t s t e dt
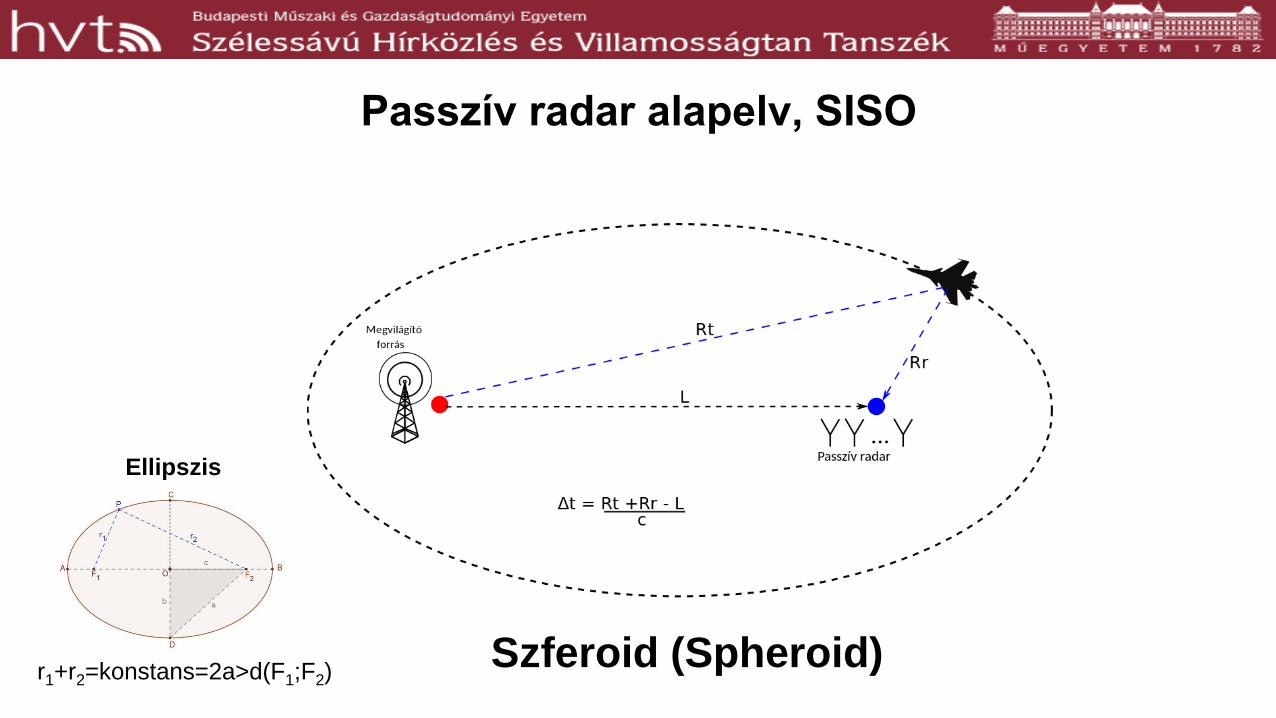
Passzív radar alapelv, SISO
r1+r2=konstans=2a>d(F1;F2)
Ellipszis
Szferoid (Spheroid)

Passzív radar elrendezések, SIMO
DVB-T SFN

Passzív radar elrendezések, MIMO
Azimuth mérés alaptípusai
DoA és/vagy TDoA

Koherencia, korreláció
2 2
0
, , d d
T
j f t j f t
d t ref t reff s t s t e s t s t e dt
2 2, , d d
ref
j f t j f t
d t ref tf s t s t e s t s t e dt
• kvázi-stacioner folyamat
• frissítési idő
• több cellán történő áthaladás
T függvénye
• a céltárgy manőverező képességének
• a pozícionált track Doppler variancia érzékenységének
Track Before Detection (TBD)
Track Before Detection (TBD)
, ,df
, , ,df track
Lineáris track modell nem biztos, hogy kielégítő!

FM illuminátor
FM rádió (egy csatorna)
• gyenge felbontás
• tartalomfüggő, idővariáns viselkedés
• nagy hatótávolság
Miért jó?
• nagyobb hatótávolságú mérés
• kijelöli a target hozzávetőleges helyét,
így a más megvilágításon alapuló
jelfeldolgozás hatékonyságát növeli,
• TBD

Multi-csatornás illumináció
Előnyei
• jobb felbontás
• nagyobb pontosság
• nagyobb megbízhatóság
Ár
• komplex RF és DSP
• komplex algoritmusok
Compressive Sensing
Signal processing technique for efficiently acquiring
and reconstructing a signal, by finding solutions to
underdetermined linear systems.

Passzív radar illuminátorok
Megvilágító forrás
Frekvenciasáv [MHz]
Tipikus adóteljesítmény
(EIRP)
Sávszélesség
[MHz]
Elérhetőtávolságfelbontás
Hatótávolság
FM rádió 88 – 108 10 kW -100 kW ~ 0.15 ~ 1km ~ 100 km
DAB 174 – 240 1 kW -10 kW 1.5 100 m ~ 50 km
DVB-T 480 -800 1 kW -100 kW 7.6 20 m ~ 50 km
DVB-S 10700-12700 100W – 1kW 27-30 10 m -
GSM 900 / 1800 10 W 0.2 750 m ~ 2 km
UMTS 2100 100W -1kW 5 30 m -
LTE 800 / 3500 20-69 W 1.4 - 20 100m – 7.5m -
WiFi 2400 0.1 W 11/20 13 m / 7.5 m ~ 100m
GNSS(GLONASS)
1600 MHz 300W – 500W 5 30 m ~ 500 m
Tipikusan műsorszóró

Passzív radar DVB-T illuminátor

ALPOK 3
Kutatási-fejlesztési feladat végrehajtása a
„Földfelszíni jelforrásokon és digitális műsorszóráson alapuló,
alacsony magasságú célok felderítésére és réskitöltő feladatokra
alkalmas technológia és képesség fejlesztése – hazai technológiai
demonstrátor fejlesztése a MAPIS projekthez kapcsolódóan”
Hazai Passzív radar K+F
BME HVT BHESZTAKI
Megbízó: MH Modernizációs Intézet

ALPOK3 Passzív radar terepi mérés

ALPOK3 Passzív radar terepi mérés

ALPOK3 Passzív radar terepi mérés

ALPOK3 Passzív radar terepi mérés
Hurkok

ALPOK3 Passzív radar terepi mérés

UAV mérhetősége (RCS)
Probléma
• Rendkívül kicsi RCS 0,01m2
• Erős álló és mozgó clutterek
• Madarak

Mikro-Doppler jelenség
Séta (ember)

Mikro-Doppler jelenség

Mikro-Doppler jelenség
Drón propeller mikro-Doppler DVB-T passzív radarral mért folyamata; R=100m

Mikro-Doppler jelenség
Lobkorona szélben

Passzív radarok fejlődési irányai
• Passzív radarok MIMO struktúrában történő alkalmazása.
• DoA és TDoA mérési elv együttes alkalmazása.
• Széles frekvenciasávban történő mérés. Különböző illumináció alapuló
passzív radar szenzorok fúziója (pl. FM, DVB-T, DVB-S, GNSS).
• Passzív radarok fúziója szemi-passzív WAMLAT rendszerrel.
• Klasszifikációs képességek kifejlesztése.
• Drón detekciós képesség kifejlesztése.

Mobile systems
Airborne sensors
Personal sensors
Fixed systems
Maritime sensors
Vízió
Vízió
Aktuális
Középtávon aktuális
Passzív radarok fejlődési irányai
Vízió
Aktuális

Köszönöm a figyelmet!
Related Documents











