Automatica 55 (2015) 287–293 Contents lists available at ScienceDirect Automatica journal homepage: www.elsevier.com/locate/automatica Brief paper Passification based synchronization of nonlinear systems under communication constraints and bounded disturbances ✩ Alexander L. Fradkov a,b,c , Boris Andrievsky a,b,1 , Mikhail S. Ananyevskiy a,b a Institute for Problems of Mechanical Engineering of the RAS, Saint Petersburg, Russia b St. Petersburg State University, Saint Petersburg, Russia c ITMO University, Saint Petersburg, Russia article info Article history: Received 10 September 2012 Received in revised form 14 November 2014 Accepted 2 March 2015 Keywords: Passification method Nonlinear systems Synchronization State estimation Communication constraints abstract In brief the synchronization problem for nonlinear systems under communication constraints and bounded exogenous disturbances is analyzed. The main contribution is in the evaluation of the synchro- nization error as a function of transmission rate and the upper bounds of the disturbances. Relevance of passifiability condition for controlled synchronization of master–slave nonlinear systems for first order coder/decoder pair is demonstrated. Experimental results obtained at three-computer setup, illustrating the theory are presented. © 2015 Elsevier Ltd. All rights reserved. 1. Introduction The limitations of control under constraints imposed by a finite capacity of information channel have been investigated in detail in the control literature, see the surveys (Andrievsky, Matveev, & Fradkov, 2010; Baillieul & Antsaklis, 2007; Nair, Fagnani, Zampieri, & Evans, 2007), the monograph (Matveev & Savkin, 2009) and references therein. It has been shown that stabilization of linear systems under information constraints is possible if and only if the capacity of the information channel exceeds the entropy produc- tion of the system at the equilibrium (data rate theorem)(Nair & Evans, 2003). Results of the previous works on control systems analysis under information constraints do not apply to synchro- nization systems since in a synchronization problem trajectories in the phase space converge to a set (a manifold) rather than to a ✩ The material in this paper was partially presented at the 18th IFAC World Congress, August 28–September 2, 2011, Milan, Italy. This paper was recommended for publication in revised form by Associate Editor Zhihua Qu under the direction of Editor Andrew R. Teel. E-mail addresses: [email protected] (A.L. Fradkov), [email protected] (B. Andrievsky), [email protected] (M.S. Ananyevskiy). URL: http://www.ipme.ru/ipme/labs/ccs/alf.htm (A.L. Fradkov). 1 IPME RAS, 61, Bolshoy Ave. V.O., Saint Petersburg, 199178, Russia. Tel.: +7 812 321 4766; fax: +7 812 321 4771. point, i.e. the problem cannot be reduced to simple stabilization. Moreover, the data rate theorem is difficult to extend to nonlinear systems (Liberzon & Hespanha, 2005). One of the first approaches to synchronization of nonlinear systems under information constraints (Fradkov, Andrievsky, & Evans, 2009) is based on passification. In Fradkov et al. (2009) the output feedback controlled synchronization of two nonlinear systems assuming that the coupling is implemented via the control signal, transmitted over a limited-band communication channel was considered. Key tools used to solve the problem are quadratic Lyapunov functions and the passification method (Andrievskii & Fradkov, 2006; Fradkov, 1974; Fradkov & Andrievsky, 2011). Passification (rendering the closed loop system passive by output feedback) provides a simple design tool for a simple adaptive controller. The present work is focused on the problem of synchronization and state estimation of nonlinear systems over the communication network under information constraints in presence of the exoge- nous model disturbances and measurement errors. Although the transmission delay and transmission channel distortions usually appear in practice, it is assumed here that the coded symbols are available at the receiver side at the same sampling instant as they are generated by the coder and transmission channel distortions are absent. We assume that only plant output (instead of all the components of the state vector) can be measured, and base our re- mote synchronization and state estimation schemes on transmis- sion of the scalar signal rather than a state vector. http://dx.doi.org/10.1016/j.automatica.2015.03.012 0005-1098/© 2015 Elsevier Ltd. All rights reserved.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Automatica 55 (2015) 287–293
Contents lists available at ScienceDirect
Automatica
journal homepage: www.elsevier.com/locate/automatica
Brief paper
Passification based synchronization of nonlinear systems undercommunication constraints and bounded disturbances
Alexander L. Fradkov a,b,c, Boris Andrievsky a,b,1, Mikhail S. Ananyevskiy a,b
a Institute for Problems of Mechanical Engineering of the RAS, Saint Petersburg, Russiab St. Petersburg State University, Saint Petersburg, Russiac ITMO University, Saint Petersburg, Russia
a r t i c l e i n f o
Article history:Received 10 September 2012Received in revised form14 November 2014Accepted 2 March 2015
Keywords:Passification methodNonlinear systemsSynchronizationState estimationCommunication constraints
a b s t r a c t
In brief the synchronization problem for nonlinear systems under communication constraints andbounded exogenous disturbances is analyzed. The main contribution is in the evaluation of the synchro-nization error as a function of transmission rate and the upper bounds of the disturbances. Relevance ofpassifiability condition for controlled synchronization of master–slave nonlinear systems for first ordercoder/decoder pair is demonstrated. Experimental results obtained at three-computer setup, illustratingthe theory are presented.
© 2015 Elsevier Ltd. All rights reserved.
1. Introduction
The limitations of control under constraints imposed by a finitecapacity of information channel have been investigated in detailin the control literature, see the surveys (Andrievsky, Matveev, &Fradkov, 2010; Baillieul & Antsaklis, 2007; Nair, Fagnani, Zampieri,& Evans, 2007), the monograph (Matveev & Savkin, 2009) andreferences therein. It has been shown that stabilization of linearsystems under information constraints is possible if and only if thecapacity of the information channel exceeds the entropy produc-tion of the system at the equilibrium (data rate theorem) (Nair &Evans, 2003). Results of the previous works on control systemsanalysis under information constraints do not apply to synchro-nization systems since in a synchronization problem trajectoriesin the phase space converge to a set (a manifold) rather than to a
The material in this paper was partially presented at the 18th IFAC WorldCongress, August 28–September 2, 2011,Milan, Italy. This paperwas recommendedfor publication in revised form by Associate Editor Zhihua Qu under the direction ofEditor Andrew R. Teel.
E-mail addresses: [email protected] (A.L. Fradkov),[email protected] (B. Andrievsky), [email protected](M.S. Ananyevskiy).
URL: http://www.ipme.ru/ipme/labs/ccs/alf.htm (A.L. Fradkov).1 IPME RAS, 61, Bolshoy Ave. V.O., Saint Petersburg, 199178, Russia. Tel.: +7 812
321 4766; fax: +7 812 321 4771.
http://dx.doi.org/10.1016/j.automatica.2015.03.0120005-1098/© 2015 Elsevier Ltd. All rights reserved.
point, i.e. the problem cannot be reduced to simple stabilization.Moreover, the data rate theorem is difficult to extend to nonlinearsystems (Liberzon & Hespanha, 2005).
One of the first approaches to synchronization of nonlinearsystems under information constraints (Fradkov, Andrievsky, &Evans, 2009) is based on passification. In Fradkov et al. (2009)the output feedback controlled synchronization of two nonlinearsystems assuming that the coupling is implemented via the controlsignal, transmitted over a limited-band communication channelwas considered. Key tools used to solve the problem are quadraticLyapunov functions and the passification method (Andrievskii &Fradkov, 2006; Fradkov, 1974; Fradkov & Andrievsky, 2011).Passification (rendering the closed loop system passive by outputfeedback) provides a simple design tool for a simple adaptivecontroller.
The present work is focused on the problem of synchronizationand state estimation of nonlinear systems over the communicationnetwork under information constraints in presence of the exoge-nous model disturbances and measurement errors. Although thetransmission delay and transmission channel distortions usuallyappear in practice, it is assumed here that the coded symbols areavailable at the receiver side at the same sampling instant as theyare generated by the coder and transmission channel distortionsare absent. We assume that only plant output (instead of all thecomponents of the state vector) can be measured, and base our re-mote synchronization and state estimation schemes on transmis-sion of the scalar signal rather than a state vector.

288 A.L. Fradkov et al. / Automatica 55 (2015) 287–293
Recently De Persis and Jayawardhana (2012) investigated ap-plication of the passivity approach to collective coordination andsynchronization problems in the presence of quantized measure-ments. It is assumed that the system interaction is performedin a completely asynchronous fashion and no common samplingtime is required. Since the quantization interval is not explicitlybounded, then the channel bitrate of De Persis and Jayawardhana(2012) is potentially unlimited. The other distinctive feature of ourapproach is that we assume that the system is rather passifiable,than passive.
This brief is organized as follows. The binary coding procedureof Fradkov et al. (2009) is briefly recalled in Section2. Section3 con-tains main results concerning evaluation of the synchronizationerror under communication constraints, bounded exogenous dis-turbances and measurement errors. Experimental results are pre-sented in Section 4.
2. Preliminaries
2.1. Coding procedure
Starting from the results of Brockett and Liberzon (2000),Fradkov et al. (2009) and Nair and Evans (2003), in the presentbrief the following time-varying coder with memory and a binaryquantizer are used.
Let signal z(t) be transmitted over the digital communicationchannel at sampling instants tk = kT , where T is a constantsampling period and k = 0, 1, . . . are integer numbers. At eachinstant k, deviation signal ∂z[k] between transmitted signal z[k]and a certain central number c[k] (defined below) is calculated as∂z[k] = z[k]− c[k]. Then signal ∂z[k] is subjected to the followingbinary quantization scheme:
∂z[k] = M[k]sign(∂z[k]) (1)where sign(·) is the signum function,M[k] > 0 may be referred toas a time-varying quantization range.
Output signal ∂z[k] of the quantizer is transmitted over thecommunication channel to the decoder. Central numbers c[k] aredefined by the following recursive algorithm:
c[k + 1] = c[k] + ∂z[k], c[0] = 0. (2)Quantization range M[k] is represented by the following timesequence:
M[k] = (M0 − M∞)ρk+ M∞, k = 0, 1, . . . , (3)
where 0 < ρ 6 1 is the decay parameter, M∞ stands for the limitvalue of M . Initial value M0 should be large enough to capture allthe region of possible initial values of ∂z. For practice, to avoidcomputations of powers of ρ, it is advisable to calculate M[k] inthe following recursive form: M[k + 1] = ρM[k] + m, wherem = (1 − ρ)M∞, M[0] = M0.
Eqs. (1)–(3) describe the coder algorithm. A similar algorithmis represented by the decoder: the sequence ofM[k] is reproducedat the receiver node utilizing (3); values of ∂z[k] are restored withgiven M[k] from the received binary codeword; central numbersc[k] are found in the decoder in accordance with (2). Then decoderoutput z[k] is found as a sum of c[k] and ∂z[k], z[k] = c[k]+ ∂z[k].
It is worth mentioning that the considered coding schemecorresponds to the channel data rate of one bit per step or R = T−1
bits per second.
2.2. Hyper-minimum-phaseness and passification
Below the following definition is used.
Definition 1. Consider a linear time invariant system
x(t) = Ax(t)+ Bu(t), y(t) = Cx(t), (4)
where x(t) ∈ Rn, u(t) ∈ Rm, y(t) ∈ Rm, A, B, C are constant realmatrices of appropriate dimensions. System (4) is calledminimumphase if the polynomial
ϕ0(s) = detsIn − A −B
C 0
where In stands for an (n × n) identity matrix, is Hurwitz; hyperminimumphase (HMP), if it isminimumphase and CB = (CB)T > 0.
For the special case m = 1 (SISO systems) considered in thispaper the HMP property coincides with the standard minimumphase relative degree one property.
We need the following corollary from Passification theorem(Andrievskii & Fradkov, 2006).
Corollary 1. There exist n × n matrix P = PT> 0, m × m matrix K
and a scalar µ > 0 such that
PAK + AKTP < −µI, PB = CT, AK = A + BKC (5)
if and only if the system (4) is HMP.
If HMP condition holds then existence of matrix P and a scalarµ > 0 satisfying (5) is guaranteed if K = −κ Im, where κ > 0 issufficiently large.
3. Controlled synchronization of passifiable non-autonomousLurie systems
Fradkov, Andrievsky, and Evans (2008); Fradkov et al. (2009)studied a unidirectional controlled synchronization of nonlinearsystems over the limited-band communication channel. In thissection these results are extended to the case of exogenouslydisturbed systems.
3.1. Master–slave unidirectional synchronization
Consider two identical dynamical systemsmodeled in the Lurieform
x(t) = Ax(t)+ Bϕ(y1)+ f1(t), y1(t) = Cx(t)+ v1(t), (6)z(t) = Az(t)+ Bϕ(y2)+ Bu(t)+ f2(t),y2(t) = Cz(t)+ v2(t), (7)
where x(t) ∈ Rn, z(t) ∈ Rn are n-dimensional vectors of statevariables; y1(t) ∈ R1, y2(t) ∈ R1 are the scalar output variables; Ais (n× n)-matrix; B is (n× 1)-matrix; C is (1× n)-matrix, ϕ(y) is acontinuous nonlinearity; f1(t), f2(t) ∈ Rn, v1(t), v2(t) ∈ R1, denoteinput signals. Signals fi(t), vi(t), i = 1, 2 are piecewise continuous,not necessarily bounded. Boundedness will be required from theirdifferences, see below. System (6) is called amaster system. System(7), called a slave system, is controlled by a scalar control signalu(t) ∈ R1. The signal u(t) is produced based on the dataflowavailable over the limited capacity communication channel. Thegoal is to find u(t) such that the state synchronization error e(t),defined as e(t) = x(t)− z(t), becomes small as t becomes large.
3.2. Case of transmitting the master system output through acommunication channel
The case when the observation signal y1(t) is mapped to afinite alphabet of symbols at discrete time instants tk = kT(k = 0, 1, 2, . . .; T is the sampling period) before transmissionto the estimator over a digital communication channel is studiedby Fradkov et al. (2008). The zero-order extrapolation is used forconverting the digital sequence y1[k] to the continuous-time input

A.L. Fradkov et al. / Automatica 55 (2015) 287–293 289
of the response system y1(t). This leads to the following notion ofthe transmission error δy(t):
δy(t) = y1(t)− y1(t). (8)It is assumed that the controller on the receiver side can use onlythe signal y1(t) instead of y1(t). The control law is taken in the formof a static linear feedbacku(t) = −Kσ(t), (9)where σ(t) = y2(t)− y1(t), K is the scalar controller gain.
The result of this section may be summarized in the followingtheorem.
Theorem 1. Let the following assumptions hold:A1.1. Transfer functionW (λ) = C(λI−A)−1Bwith A, B, C from (6) is
HMP;A1.2. Function ϕ(y) in (6), (7) is Lipschitz continuous with the
Lipschitz constant Lϕ ;A1.3. The growth rate of y1(t) is uniformly bounded with the exact
bound Ly and transmission error is bounded: |δy(t)| 6 ∆ for∆ > 0.
A1.4. Differences between disturbances f1(t)−f2(t) and v1(t)−v2(t)are bounded, |f1(t)− f2(t)| 6 ∆1, |v1(t)− v2(t)| 6 ∆2, for allt > 0.
Then the system (6), (7), (9) is input to output stable (IOS) for inputw = (δy, f1 − f2, v1 − v2) and output e = x − z. Namely, there exista KL-function β and a K-function γ such that
∥e(t)∥ 6 βcolx(0), z(0) , t + γ
sup06s6t
w(s). (10)
Moreover the following inequality is valid:
limt→∞
∥e(t)∥ 6
λmax(P)λmin(P)
∥B∥µ
|K | + Lϕ(∆+∆2)+ Lϕ∆2 + λmax(P)∆1
, (11)
where λmax(P) and λmin(P) are, respectively, the maximal andminimal eigenvalues of matrix P in (5).
Remark 1. In the case of equal input signals ∆1 = ∆2 = 0, and(11) is reduced to the result of Fradkov et al. (2008):
limt→∞
∥e(t)∥ 6 Ce∆, (12)
where Ce =
λmax(P)λmin(P)
Lϕ+|K |
µ∥B∥.
Inequality (12) means that the total synchronization errorlimt→∞∥e(t)∥ is proportional to the upper bound on the transmis-sion error∆. The latter for a given quantizer and themaster systemdynamics, depends on sampling time T . As is stated in Fradkov et al.(2009) assuming that the growth rate of y1(t) is uniformly boundedby Ly, then the transmission error satisfies the inequality:
|δy(t)| 6M2
+ LyT , (13)
whereM denotes the quantization range (1).2
Remark 2. The exact bound Ly for the rate of y1(t) may be foundas Ly = supx∈Ω |Cx|, where x is from (6), x(0) ∈ Ω0.
Remark 3. Theorem 1 can be easily extended to the case of m-dimensional y1, y2 with m < n.
The proof of Theorem 1 is given in the Appendix.
2 The present brief deals with a binary quantizer (1). The case of a uniformquantizer is considered in Fradkov et al. (2009).
3.3. Case of transmitting the signal of the error between the masterand the slave system
Now consider the case when the error signal between the mas-ter system (6) and the slave system (7) is transmitted over thechannel. Such a case may appear in various applications. Partic-ularly both master and slave systems may have the ability to es-timate the dynamics of another system so that the output errorsignal can be directly computed. The following example is origi-nated from command guidance, where the tracking center is usedfor remote control, cf. Malyavej, Manchester, and Savkin (2006).
Let us take the control signal in the following form:
u(t) = −K ε(t), (14)
where ε(t) = ε[k] as tk < t < tk+1; ε[k] is the result oftransmission of the output error signal ε(t) = y2(t) − y1(t) overthe channel, tk = kT , k = 0, 1, . . . .
According to the quantization algorithm (1), the quantized errorsignal ε[k] becomes
ε[k] = M[k]sign(ε(tk)), (15)
where the rangeM[k] is defined by (3).The key point of justification and error analysis of the presented
synchronization scheme is application of the so-called method ofcontinuous models: analysis of the hybrid nonlinear system viaanalysis of its continuous-time approximate model (Derevitskii &Fradkov, 1974).
Theorem 2. Let A1.1, A1.2, A1.4 hold, the controller gain Ksatisfies relations (5) for some positive definite matrix P and the coderparameters ρ , T be chosen to meet the inequalities
eµT (eLF T − 1) 6LF
∥C∥(K∥B∥ + LF ), e−µT < ρ < 1, (16)
where LF = ∥A∥ + Lϕ∥B∥ · ∥C∥, µ is from (5). Let the coder rangeM[k] be specified as
M[k] = M0ρk. (17)
Then the system (6), (7), (14) is IOS for input w = col f1 − f2, v1 −
v2 and output e = x−z. Moreover, if f1 = f2 and v1 = v2, then for allinitial conditions x(0), z(0) in (6), (7) such that e(0)TPe(0) 6 M2
0 thesynchronization error decays exponentially: |ε[k]| 6 ∥e[k]∥ 6 M0ρ
k.In addition, |ε(t)| 6 |ε[k]| for tk 6 t < tk+1.
Proof of the theorem follows the lines of the proof of Theorem 1and Fradkov et al. (2009, Theorem 1).
Remark 4. For practice, it is reasonable to choose the coder rangeM[k] separated from zero and use the coder range governed by (3)as
M[k] = (M0 − M∞)ρk+ M∞, k = 0, 1, . . . ,
instead of (17) for zooming. Evidently, this leads to the residualsynchronization error.
4. Illustrative example
4.1. Master–slave system description
Consider the following example, inspired by a long standingproblem of the proportional–integral (PI) control under the con-dition of the input signal saturation. The so-called wind-up phe-nomenon may arise in such a kind of systems (Tarbouriech &Turner, 2009). The integrator wind-up may cause co-existenceof different steady-state solutions for the same reference input

290 A.L. Fradkov et al. / Automatica 55 (2015) 287–293
(van den Berg, Pogromsky, Leonov, & Rooda, 2006) or, in otherwords, loss of the convergence property (Pavlov, Pogromsky, van deWouw, & Nijmeijer, 2004). The illustrative example below demon-strates application of the design method of Section 3 (Theorem 2)for ensuring synchronization (convergence of trajectories) of twosystems, coupled over the digital communication channel.
Let master system (6) be modeled asx1(t) = ϕ
y1(t)
,
x2(t) = r(t)− x1(t),(18)
y1(t) = kPx1(t)− r(t)
− kIx2(t), (19)
ϕ(y1) = −sat(y1), (20)
where r(t) is a differentiable in t exogenous signal, sat(·) denotesthe saturation nonlinearity, kI , kP are positive gains (systemparameters). Note, that (18)–(20) may be treated as a model ofthe PI-controlled servosystem with saturated input and referencesignal r(t) (van den Berg et al., 2006).
Matrices A, B, C , functions f (t), v(t) of themaster systemmodel(6) for system (18), (19) have the following form:
A =
0 0
−1 0
, B =
10
, C =
kP , − kI
, (21)
f (t) =
0
r(t)
, v(t) = −kP r(t). (22)
Let slave system (7) be described by the similar equations withan additional control input u(t), acting in the span of matrix B:z1(t) = ϕ
y2(t)
+ u(t),
z2(t) = r(t)− z1(t),(23)
y2(t) = kPz1(t)− r(t)
− kIz2(t), (24)
ϕ(y2) = −sat(y2). (25)
Consider the master–slave synchronization problem undercommunication constraints. Let the error ε(t) = y1(t) − y2(t) bemeasured and transmitted over the communication channel witha limited capacity. In the case of binary quantization, the quantizederror signal ε[k] has the form
ε[k] = M[k]sign(ε(tk)), (26)
where rangeM[k] is defined by (17), tk = kT , k = 0, 1, . . . , and Tdenotes the sampling period.
Let us check the conditions of Theorem 2 for considered system(18)–(20).
Condition A1.1. Transfer functionW (λ) = C(λI−A)−1B =β(λ)
α(λ)
of system (18), (19) with matrices (22) has a form W (λ) =kPλ+kIλ2
.Its denominator α(λ) = λ2 is a polynomial of degree n = 2. For allpositive kP , kI , numerator β(λ) = kPλ+kI is a Hurwitz polynomialof degree 1. ThereforeW (λ) is HMP, and condition A2 of Theorem2is satisfied as gains kI , kP are positive. In what follows, kP = 10,kI = 20 are chosen, ensuring the 5%-settling time less than 1 s andthe overshoot 12% for the step response of the closed-loop linear(non-saturated) system. For the chosen controller gains, stabilitydegree µ0 of numerator β(λ) is equal to 2.
Let K = 1 be chosen in (14). Then AK in (5) is as follows:
AK =
−10 20−1 0
.
It may be easily checked that if matrix P is chosen as
P =
10 −20
−20 80
then (5) is valid for any 0 < µ < µ0, with µ0 = 2.
Fig. 1. Structure of the data flow between the servers for emulation.
Let us pick up decay parameter ρ in (3) in the form ρ = e−µT ,where µ = 0.6 is chosen to satisfy the inequality 0 < µ < 2.Obviously, such a choice implies the second inequality of (16) ife−µT < ρ < 1. To find a sufficient upper bound for samplingtime T consider the first inequality of (16). Taking into account thatLϕ = 1 and calculating H2-norms of the matrices, one may foundthat LF = ∥A∥ + Lϕ∥B∥ · ∥C∥ = 23.4. Therefore the right-handside of (16) may be estimated as LF
∥C∥(K∥B∥+LF )= 0.043. By means
of a searching procedure with respect to parameter T one can findthat the upper bound for T , ensuring fulfillment of the inequalityeµT (eLF T − 1) 6 0.043, is approximately 1.75 · 10−3 s.
Condition A1.2. Nonlinearity ϕ(y1) = −sat(y1) is Lipschitzcontinuous with Lϕ = 1.
Condition A1.4. We assume that all the disturbances arebounded, according to the definition of IOS.
Therefore, conditions of Theorem 2 for given system equationsand the chosen parameter values are fulfilled and control (14)
u(t) = −K ε(t), (27)
where ε(t) = ε[k] as tk < t < tk+1, may be applied to achievesynchronization of systems (18)–(20), (23)–(25) for K = 1, T =
1.75 ms.
4.2. Experimental results
The master–slave synchronization was emulated in real-timeover LAN. Differential equations of master and slave systems (20),(25) were numerically solved by the Euler method with time step∆t = 1.75 · 10−3 s.
Data transfer was realized over local network by TCP/IPprotocol. All three subsystems (Fig. 1) were implemented ondifferent computers (AMD FX-8350 3.5 GHz, 8 GB RAM, OS GentooLinux). The master and slave systems data were transmitted to thecontroller without limitations on the throughput channel capacity.Controller data were transmitted to the slave system according tothe described algorithm. For doing this only 570 bit/s from 100Kbit/s data rate flow were actually used for control.
Parameters of system (17), (18)–(27) were taken as follows:sampling time T = 1.75 · 10−3 s (R = 570 bit/s); harmonicexcitation signal r(t) = A sin(ωt), where ω = 0.15 s−1, A = 2.5;initial conditions: x1(0) = 0.1, x2(0) = 0, z1(0) = 3, z2(0) = 1.The coder parameters: initial quantizer range M[0] = 2, decayparameter ρ was found as ρ = exp(−µ T ) for µ = 0.6, whichled to ρ = 0.99895.
The parameters or real communication experiment betweenthree different PCs were used in the numerical example for thesimulations. To represent the data transfer in one bit per sample,the communications have been emulated via the standard TCP/IPprotocol.
The emulation results are depicted in Figs. 2 and 3. Time his-tories of state space variables x1(t), z1(t) of systems (18)–(20),(23)–(25) for u(t) ≡ 0 are shown in Fig. 2. The phenomenon ofnon-synchronized motion caused by an absence of the mentioned
A.L. Fradkov et al. / Automatica 55 (2015) 287–293 291
Fig. 2. Time histories of x1(t), z1(t) for u(t) ≡ 0. No synchronization occurs.
Fig. 3. Time histories of x1(t), z1(t), u(t) for the case of control (27). Samplingperiod T = 1.75 · 10−3 s (R = 570 bit/s).
Fig. 4. Synchronization error x1(t) − z1(t) time histories for various K ∈
0.2, 0.5, 1.0, 2.0, 5.0.
convergence property is visible, demonstrating that the synchro-nization may not be achieved despite that the same reference sig-nal is applied to identical systems.
Successful synchronization over the digital communicationchannel by means of control law (27) and binary coder (17), (26)is demonstrated in Fig. 3, where the time histories x1(t), z1(t),u(t) for the given above controller/coder parameters are plotted.It is seen from the plots that the synchronization transient timeis about 6 s, which well corresponds to chosen decay parameterρ = exp(−µ T ) for µ = 0.6.
The system parameters have been chosen to satisfy Theorem 2conditions. Since the value of K in control law (14) should be takensufficiently large (cf. the remark below Eq. (5)), we have made50 experiments for K varying from 0.1 to 50 demonstrating de-pendence of synchronization dynamics on K . Some representativeexamples are plotted in Fig. 4. It is seen from the plots, that forsmall K (K = 0.2) the synchronization fails; for sufficiently largeK (K > 0.5), the synchronization occurs. As also seen from theplots, for large values of K dependence of the synchronization rateon K is weaker.
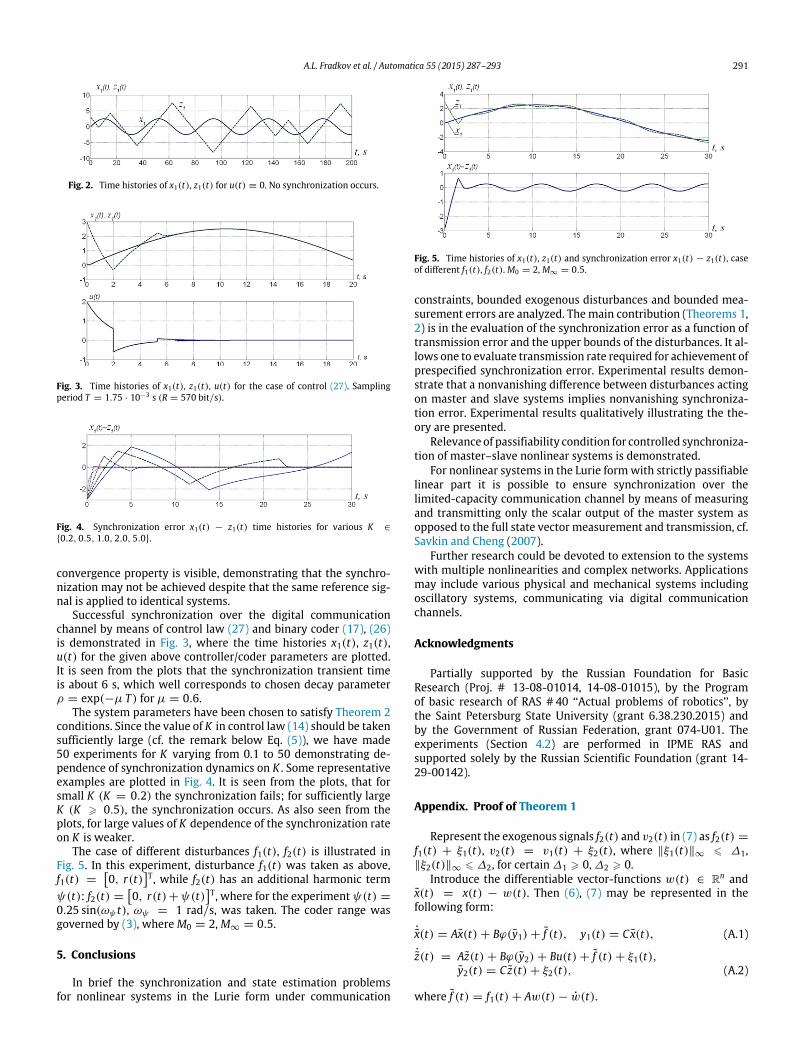
The case of different disturbances f1(t), f2(t) is illustrated inFig. 5. In this experiment, disturbance f1(t) was taken as above,f1(t) =
0, r(t)
T, while f2(t) has an additional harmonic term
ψ(t): f2(t) =0, r(t)+ψ(t)
T, where for the experimentψ(t) =
0.25 sin(ωψ t), ωψ = 1 rad/s, was taken. The coder range wasgoverned by (3), whereM0 = 2,M∞ = 0.5.
5. Conclusions
In brief the synchronization and state estimation problemsfor nonlinear systems in the Lurie form under communication
Fig. 5. Time histories of x1(t), z1(t) and synchronization error x1(t) − z1(t), caseof different f1(t), f2(t).M0 = 2,M∞ = 0.5.
constraints, bounded exogenous disturbances and bounded mea-surement errors are analyzed. Themain contribution (Theorems 1,2) is in the evaluation of the synchronization error as a function oftransmission error and the upper bounds of the disturbances. It al-lows one to evaluate transmission rate required for achievement ofprespecified synchronization error. Experimental results demon-strate that a nonvanishing difference between disturbances actingon master and slave systems implies nonvanishing synchroniza-tion error. Experimental results qualitatively illustrating the the-ory are presented.
Relevance of passifiability condition for controlled synchroniza-tion of master–slave nonlinear systems is demonstrated.
For nonlinear systems in the Lurie formwith strictly passifiablelinear part it is possible to ensure synchronization over thelimited-capacity communication channel by means of measuringand transmitting only the scalar output of the master system asopposed to the full state vector measurement and transmission, cf.Savkin and Cheng (2007).
Further research could be devoted to extension to the systemswith multiple nonlinearities and complex networks. Applicationsmay include various physical and mechanical systems includingoscillatory systems, communicating via digital communicationchannels.
Acknowledgments
Partially supported by the Russian Foundation for BasicResearch (Proj. # 13-08-01014, 14-08-01015), by the Programof basic research of RAS #40 ‘‘Actual problems of robotics’’, bythe Saint Petersburg State University (grant 6.38.230.2015) andby the Government of Russian Federation, grant 074-U01. Theexperiments (Section 4.2) are performed in IPME RAS andsupported solely by the Russian Scientific Foundation (grant 14-29-00142).
Appendix. Proof of Theorem 1
Represent the exogenous signals f2(t) and v2(t) in (7) as f2(t) =
f1(t) + ξ1(t), v2(t) = v1(t) + ξ2(t), where ∥ξ1(t)∥∞ 6 ∆1,∥ξ2(t)∥∞ 6 ∆2, for certain∆1 > 0,∆2 > 0.
Introduce the differentiable vector-functions w(t) ∈ Rn andx(t) = x(t) − w(t). Then (6), (7) may be represented in thefollowing form:
˙x(t) = Ax(t)+ Bϕ(y1)+ f (t), y1(t) = Cx(t), (A.1)˙z(t) = Az(t)+ Bϕ(y2)+ Bu(t)+ f (t)+ ξ1(t),
y2(t) = Cz(t)+ ξ2(t), (A.2)
where f (t) = f1(t)+ Aw(t)− w(t).

292 A.L. Fradkov et al. / Automatica 55 (2015) 287–293
Since x(t) = x(t)+w(t)we have y1(t) = Cx(t)+Cw(t)+v1(t)and (6) reads
˙x(t)+ w(t) = Ax(t)+ Aw(t)+ Bϕ(Cx + Cw + v1)+ f (t). (A.3)
Let us represent row-vector C as C = [c1, c2, . . . , cn] andassume that ∥C∥ = 0. Then there exists i ∈ 1, 2, . . . , n suchthat ci = 0. Picking up w(t) such that w(t) = −c−1
i v(t), andwj(t) ≡ 0 for all j ∈ 1, 2, . . . , n as j = i, one obtains thatCw(t)+ v1(t) ≡ 0 and, therefore, y1(t) = Cx(t), and (A.3) may berewritten as follows:
˙x(t) = Ax(t)+ Bϕ(y)+ f (t), y1(t) = Cx(t). (A.4)
The similar transformation of (7) leads to (A.2). Since x(t) =
x(t)−w(t) and z(t) = z(t)−w(t) then the synchronization errore(t) = x(t) − z(t) may be represented as e(t) = x(t) − z(t).Subtracting (A.2) from (A.1) leads to the following error equation:
e(t) = Ae(t)− Bu(t)+ Bϕ(y1)− ϕ(y2 + ξ2)
− ξ1. (A.5)
Taking into account control law (9) u = −Kσ = −K−Ce(t) +
δy(t)+ ξ2(t), (A.5) reads as
e(t) = AK e(t)+ Bϕ(y1)− ϕ(y2 + ξ2)
− ξ(t), (A.6)
where ξ(t) = ξ1(t)+ BKδy(t)+ ξ2(t)
, AK = A − BKC .
Introduce the extended nonlinearity
ζ (t) = ϕy1(t)
− ϕ
y2(t)
+ Lϕσ(t). (A.7)
It follows from Lipschitz condition A1.2 that
ζ (t)σ (t) > 0 for all t > 0, (A.8)
i.e. ζ (t) satisfies sector condition. Make the change K := K + Lϕ .Then error equation (A.6) reads
e(t) = AK e(t)+ Bζ (t)− ξ (t), (A.9)
where ζ (t) satisfies sector condition (A.8), and
ξ = ξ1 − B(K + Lϕ)δy(t)+ ξ2(t)
+ BKϕ(y2)− ϕ(y2 + ξ2)
. (A.10)
Apparently,Kϕ(y2)− ϕ(y2 + ξ2)
6 |K |Lϕ∆2.Consider the Lyapunov function candidate V (e) = eTPe, where
P = PT > 0. From Passification Theorem (Andrievskii & Fradkov,2006; Fradkov & Andrievsky, 2011) and simple algebra establishexistence of function V (e), and controller gain K such that
V (e) 6 −2µV (e)+ µ0√V , (A.11)
where µ0 =√V (B)
|K | + Lϕ
(∆ + ∆2) + Lϕ∆2 +
√λm∆1
,
λm = λmax(P). Denoting W (e) =√(V (e)) we transform (A.11) to
the linear differential inequality W 6 −µ/2W + µ0/2. It impliesIOS property with β(·, t) exponentially tending to zero as t → ∞.Since V < 0 in the set
√V (e) > µ0
µ, the value of limt→∞V
e(t)
cannot exceed
µ20
µ2=
V (B)µ2
|K | + Lϕ
(∆+∆2)+ Lϕ∆2 + λmax(P)∆1
2. (A.12)
Therefore
limt→∞
∥e(t)∥ 6
λmax(P)λmin(P)
∥B∥µ
|K | + Lϕ
(∆+∆2)
+ Lϕ∆2 + λmax(P)∆1
, (A.13)
i.e. (11) is proven.
References
Andrievskii, B., & Fradkov, A. L. (2006). Method of passification in adaptivecontrol, estimation, and synchronization. Automation and Remote Control,67(11), 1699–1731.
Andrievsky, B. R., Matveev, A. S., & Fradkov, A. L. (2010). Control and estimationunder information constraints: toward a unified theory of control, computationand communications. Automation and Remote Control, 71(4), 572–633.
Baillieul, J., & Antsaklis, P. J. (2007). Control and communication challenges innetworked real-time systems. Proceedings of the IEEE, 95(1), 9–28. Special Issueon Technology of Networked Control Systems.
Brockett, R. W., & Liberzon, D. (2000). Quantized feedback stabilization of linearsystems. IEEE Transactions on Automatic Control, 45(7), 1279–1289.
De Persis, Claudio, & Jayawardhana, Bayu (2012). Coordination of passive systemsunder quantized measurements. SIAM Journal on Control and Optimization,50(6), 3155–3177.
Derevitskii, D. P., & Fradkov, A. L. (1974). Two models for analyzing dynamics ofadaptation algorithms. Automation and Remote Control, 35(1), 59–67.
Fradkov, A. L. (1974). Synthesis of an adaptive system for linear plant stabilization.Automation and Remote Control, 35(12), 1960–1966.
Fradkov, A. L., & Andrievsky, B. (2011). Passification-based robust flight controldesign. Automatica, 47(12), 2743–2748.
Fradkov, A. L., Andrievsky, B., & Evans, R. J. (2008). Controlled synchronization underinformation constraints. Physical Review E, 78, 036210. 1–6.
Fradkov, A. L., Andrievsky, B., & Evans, R. J. (2009). Synchronization of passifiableLurie systems via limited-capacity communication channel. IEEE Transactionson Circuits and Systems. I , 56(2), 430–439.
Liberzon, D., & Hespanha, J. P. (2005). Stabilization of nonlinear systems withlimited information feedback. IEEE Transactions on Automatic Control, 50(6),910–915.
Malyavej, V., Manchester, I. R., & Savkin, A. V. (2006). Precision missile guidanceusing radar/multiple-video sensor fusion via communication channelswith bit-rate constraints. Automatica, 42, 763–769.
Matveev, A. S., & Savkin, A. V. (2009). Estimation and control over communicationnetworks. Boston: Birkhäuser.
Nair, G. N., & Evans, R. J. (2003). Exponential stabilisability of finite-dimensionallinear systems with limited data rates. Automatica, 39, 585–593.
Nair, G. N., Fagnani, F., Zampieri, S., & Evans, R. J. (2007). Feedback control underdata rate constraints: an overview. Proceedings of the IEEE, 95(1), 108–137.
Pavlov, A., Pogromsky, A., van de Wouw, N., & Nijmeijer, H. (2004). Convergentdynamics, a tribute to Boris Pavlovich Demidovich. Systems & Control Letters,52, 257–261.
Savkin, A. V., & Cheng, T.M. (2007). Detectability and output feedback stabilizabilityof nonlinear networked control systems. IEEE Transactions on Automatic Control,52(4), 730–735.
Tarbouriech, S., & Turner, M. (2009). Anti-windup design: an overview of somerecent advances and open problems. IET Control Theory & Applications, 3(1),1–19.
van den Berg, R., Pogromsky, A. Y., Leonov, G. A., & Rooda, J. E. (2006). Designof convergent switched systems. In K. Y. Pettersen, & J. Y. Gravdahl (Eds.),Lecture notes in control and information sciences: Vol. 336. Group coordinationand cooperative control (pp. 291–311). Berlin: Springer.
Alexander L. Fradkov received Diploma degree in Math-ematics from Saint Petersburg State University in 1971under supervision of V.A. Yakubovich; Candidate of Sci-ences (Ph.D.) degree in Technical Cybernetics in 1975 fromLeningrad Mechanical Institute; Doctor of Sciences (Ha-bilitation) degree in Control Engineering in 1986 fromLeningrad Electrotechnical University. Since 1990 he hasbeen the Head of the ‘‘Control of Complex Systems’’ Labof the Institute of Problems in Mechanical Engineering ofRussian Academy of Sciences. He is also a part-time Profes-sor with Saint Petersburg State University and with ITMO
University in Saint Petersburg. He is a coauthor of more than 600 journal and con-ference papers, 16 books and textbooks, and a holder of ten patents. His researchinterests include nonlinear and adaptive control, control of oscillatory and chaoticsystems, dynamics and control of complex physical systems and networks. In hisbook ‘‘Cybernetical Physics’’ (Nauka, 2003; Springer-Verlag, 2007) an emergingboundary field between physics and control is pioneered. He has been IEEE Fel-low since 2004, Founder and President of the International Physics and ControlSociety (IPACS) in 2005–2013, member of European Control Association (EUCA)since 2014, member of the Russian National Committee of Automatic Control since1998. He is a member of the IEEE Control Systems Society Conference EditorialBoard (1998–2015), Chair of the IFAC TC on Adaptive and Learning Systems during2008–2011 and 2011–2014 , Editor-in-Chief of the international journal ‘‘Cybernet-ics and Physics’’ launched in 2012.

A.L. Fradkov et al. / Automatica 55 (2015) 287–293 293
Boris Andrievsky received his Diploma degree (M.Sc.)in Electrical Engineering in 1972, Candidate of Sciences(Ph.D.) degree in Control Engineering in 1979 from theBaltic State Technical University, Saint Petersburg, andDoctor of Sciences (D.Sc.) degree in 2005 from the Institutefor Problems of Mechanical Engineering of the RussianAcademy of Sciences (IPME RAS). Since 1998 he has beenwith the IPME RAS, where he holds a position of LeadingResearch Fellow. Since 2010, he has also served as aProfessor of the ITMO University in Saint Petersburg, andsince 2012 he has held a position of the Principal Research
Fellow at Saint Petersburg State University. He had been Visiting Researcher atLAAS–CNRS, Toulouse, for several months from 2003 to 2010; at The Universityof Melbourne (September–November 2005 and October–December 2007) andEindhoven University of Technology (Aug 2008–March 2009). He is an IEEE SeniorMember, and a member of The International Physics And Control Society (IPACS)and The International Public Association ‘‘Academy of Navigation and MotionControl’’. He has been the member of the IFAC Technical Committee on Adaptiveand Learning Systems and the IFAC Technical Committee on Aerospace. He servedas IPC and NOC member for several international conferences. He is the coauthor
of more than 230 publications, including several monographs and textbooks. Hisfields of research are adaptive and variable structure control, control of oscillations,and applications to control in aerospace, control of mechanical systems, and signalprocessing.
Mikhail S. Ananyevskiy received Diploma degree inMathematics from Saint Petersburg State University in2004; Candidate of Sciences (Ph.D.) degree in Mathemat-ical Cybernetics in 2007 from Saint Petersburg State Uni-versity. Since 2004 he has a position in ‘‘Control of Com-plex Systems’’ laboratory of the Institute of Problems ofMechanical Engineering of Russian Academy of Sciences.He is also a part-time Associate Professor with Saint Pe-tersburg State University. His research interests includenonlinear control, control of oscillatory and quantum sys-tems, control over Internet. Since 2003 he participates in
organization of high school student olympiades (contests) in cybernetics in SaintPetersburg. He co-edited several editions of the problem collections book for theseolympiades.
Related Documents











