A Secure Cooperative Approach for Nonline-of-Sight Location Verification in VANET Osama Abumansoor and Azzedine Boukerche Department of Information Technology and Engineering, University of Ottawa IEEE Transactions on Vehicular Technology, TVT 2012 Wireless & Mobile Network Laboratory (WMNL.) Department of Computer Science and Information Engineering, Tamkang Uni

Osama Abumansoor and Azzedine Boukerche Department of Information Technology and Engineering, University of Ottawa IEEE Transactions on Vehicular Technology,
Dec 29, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Secure Cooperative Approach for
Nonline-of-Sight Location Verification
in VANET
Osama Abumansoor and Azzedine BoukercheDepartment of Information Technology and Engineering, University of Ottawa
IEEE Transactions on Vehicular Technology, TVT 2012
Wireless & Mobile Network Laboratory (WMNL.) Department of Computer Science and Information Engineering, Tamkang University

Page: 2WMNL
Outline
Introduction
Multi-Hop Location Verification Protocol (MHLVP)
Performance Evaluation
Conclusion
Page: 3WMNL
• Vehicular networks (VANETs) are experiencing rapid growth and evolution under the increasing demand of vehicular traffic management, driving safety, and comfort of drivers.
Introduction

Page: 4WMNL
Introduction
• Many of these applications require knowledge of neighboring vehicles’ location specifications.

Page: 5WMNL
Introduction
• Improving and maintaining drivers’ neighborhood awareness are important in VANETs.
Page: 6WMNL
Introduction
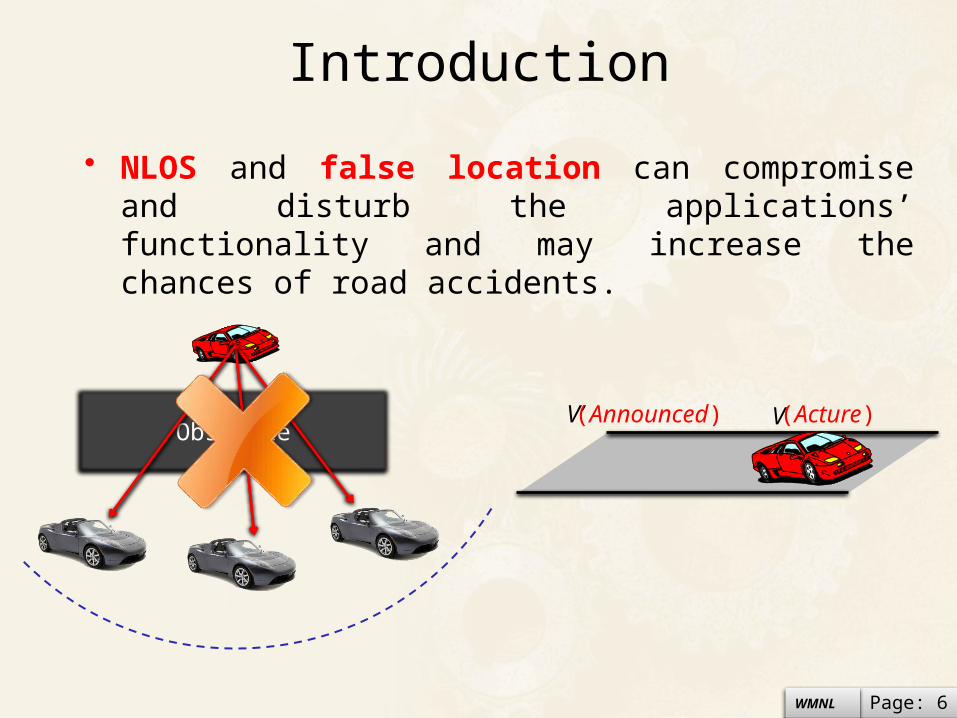
• NLOS and false location can compromise and disturb the applications’ functionality and may increase the chances of road accidents.
V (Acture)V’(Announced)Obstacle

Page: 7WMNL
Introduction
• NLOS and false location can compromise and disturb the applications’ functionality and may increase the chances of road accidents.
!
!

Page: 8WMNL
Goal
• Proposes a novel location verification protocol among cooperative neighboring vehicles for VANETs
– Verifies a vehicle’s announced location.
– Overcome an NLOS condition.
– Increase the vehicles’ rate of neighborhood awareness
– Providing reliable position information for upper level applications.

Page: 9WMNL
Multi-Hop Location Verification Protocol
(MHLVP)

Page: 10WMNL
Network Assumption
• Each vehicle is equipped with
– GPS
– Communication device
– Capability for measuring the RSS

Page: 11WMNL
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location

Page: 12WMNL
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location
A
B
(XA,YA)
(Acture)
dAB(RSS)dAB(Coordinate)
B’ (XB,YB)(Announced)
dAB(RSS)dAB(Coordinate)

Page: 13WMNL
dAB(RSS)dAB(Coordinate) dAB(RSS)dAB(Coordinate)
C(XC,YC)
MHLVP Protocol - Basic Idea
Location Verification
NLOS Condition False location
A
B
(XA,YA)
(Acture)
dAB(RSS)dAB(Coordinate)
B’ (XB,YB)(Announced)
Obstacle
A (XA,YA)
B (XB,YB)dBC(RSS)
dAC(RSS)
θ
dAB(RSS)

Page: 14WMNL
MHLVP Protocol
A(XA,YA)
B(XB,YB)
C(XC,YC)
D(XD,YD)
Neighbor Table
ID Locaion Mobility Vector Time Stamp
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
B’s Neighbor Table
A (XA,YA) MA TA
C (XC,YC) MC TC
D (XD,YD) MD TD
C’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
D (XD,YD) MD TD
D’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
C (XC,YC) MC TC
Maintain the neighbors’ information
Page: 15WMNL
MHLVP Protocol
A(XA,YA)
B(XB,YB)
C(XC,YC)
D(XD,YD)
Neighbor Table
ID Locaion Mobility Vector Time Stamp
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
B’s Neighbor Table
A (XA,YA) MA TA
C (XC,YC) MC TC
D (XD,YD) MD TD
C’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
D (XD,YD) MD TD
D’s Neighbor Table
A (XA,YA) MA TA
B (XB,YB) MB TB
C (XC,YC) MC TC
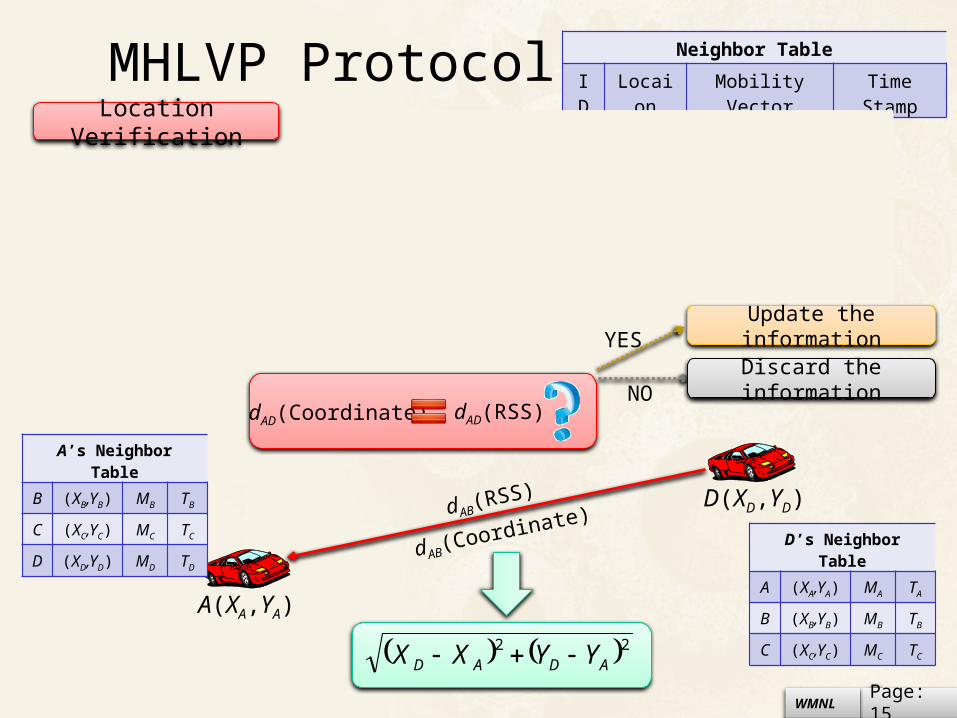
Location Verification
dAB(RSS)
dAB(Coordinate)
dAD(RSS)dAD(Coordinate)
22ADAD YYXX
YESUpdate the information
NODiscard the information

Page: 16WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD
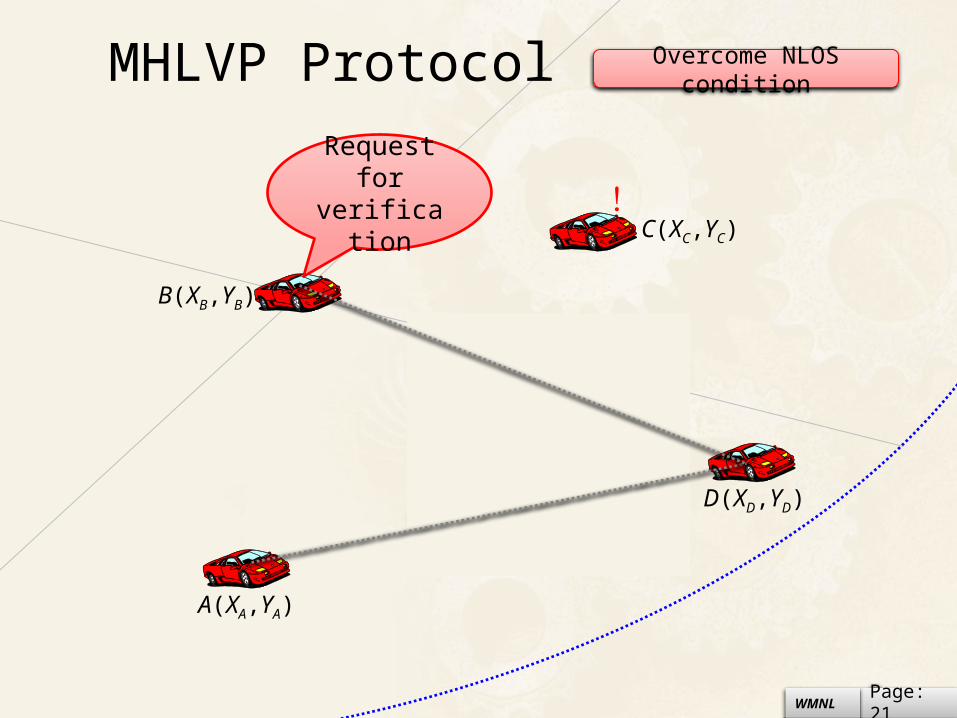
Overcome NLOS condition
A’s Neighbor Table
B (XB,YB) MB TB
C (XC,YC) MC TC
D (XD,YD) MD TD!
Request for verification
!!
B(XB,YB)
C(XC,YC)

Page: 17WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
YES Reply Request
NO Forward RequestDirect LOS with D

Page: 18WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
C(XC,YC)
dBD(RSS)
Overcome NLOS condition
{dBD(RSS), D(XD,YD)}
B(XB,YB)

Page: 19WMNL
MHLVP Protocol
A(XA,YA)
D(XD,YD)
B(XB,YB)
dBD(RSS)
Overcome NLOS condition
dAB(RSS)
C(XC,YC)
θ
)(arcos BDBA
cos222BDABBDABAD ddddd
dAD(RSS)
dAD(RSS)dAD(Coordinate)
YESUpdate the information
NOIgnore and delete the record

Page: 20WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
YES Reply Request
NO Forward RequestDirect LOS with D
Request for verification
Page: 21WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
Request for verification !
Page: 22WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
{dCD(RSS), D(XD
,YD)}
Direct LOS with D

Page: 23WMNL
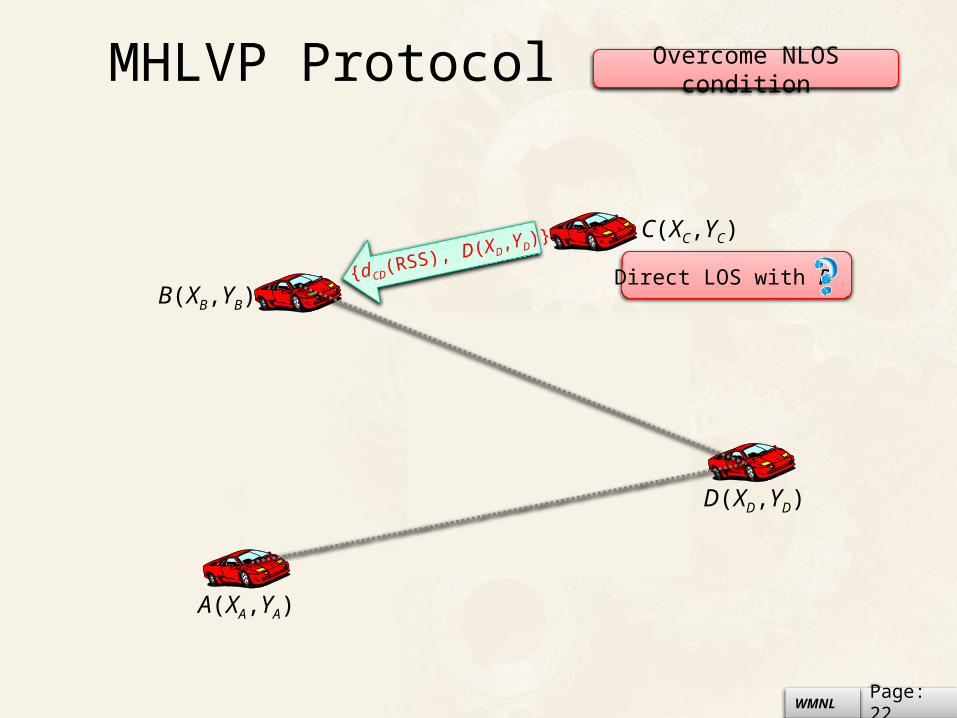
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
θBCD
dCD(RSS)
dBC(RSS)
dBD(RSS)dBD(Coordinate)

Page: 24WMNL
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
{dBD(RSS), D(XD,YD)}
Page: 25WMNL
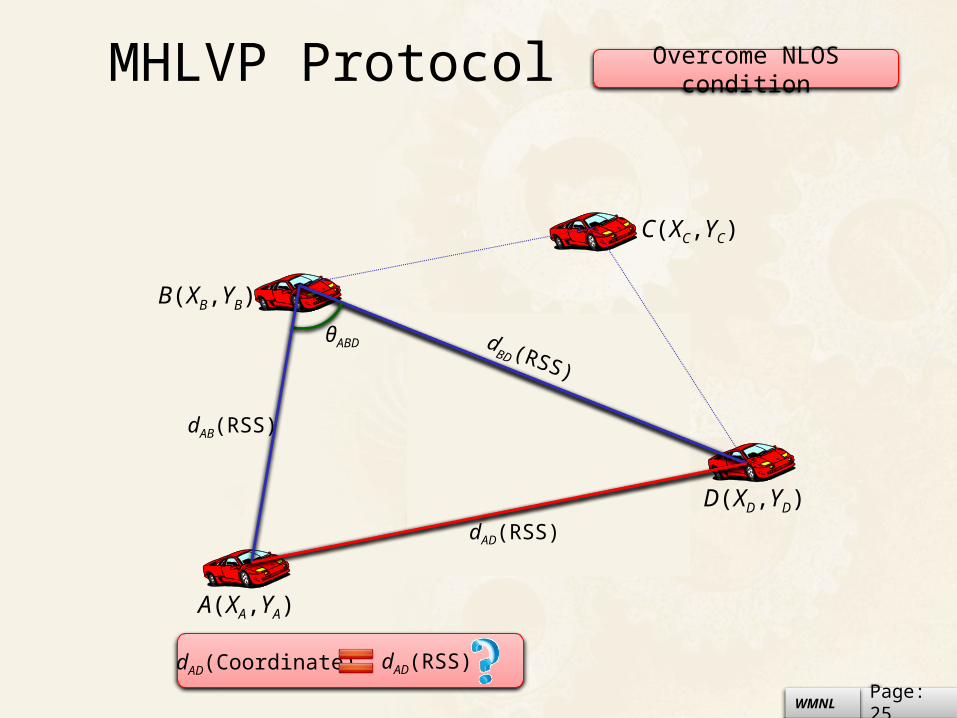
C(XC,YC)
B(XB,YB)
MHLVP Protocol
A(XA,YA)
D(XD,YD)
Overcome NLOS condition
dBD(RSS)
θABD
dAB(RSS)
dAD(RSS)
dAD(RSS)dAD(Coordinate)

Page: 26WMNL
Performance Evaluation
Simulation ParametersSimulator ns-2 ver 2.34
Simulation Time 15~30 minutes
Number of Vehicles 100~1000
Simulation Area 20 km (Highway 417 in Ottawa)
Communication Range 300 m
Radio Propagation Two-ray ground
Antenna Type Omni antenna
MAC Layer 802.11p
Beacon Frequency 1 Hz
Max Hop 4
Data Rate 6 Mbps
Packet Payload 152 Byte
Speed Limits 0~100 km/h
Obstacle Length 10~15 m

Page: 27WMNL
Performance EvaluationObstacle Model
LOS (Line-of-Sight) NLOS (None-Line-of-Sight)
Page: 28WMNL
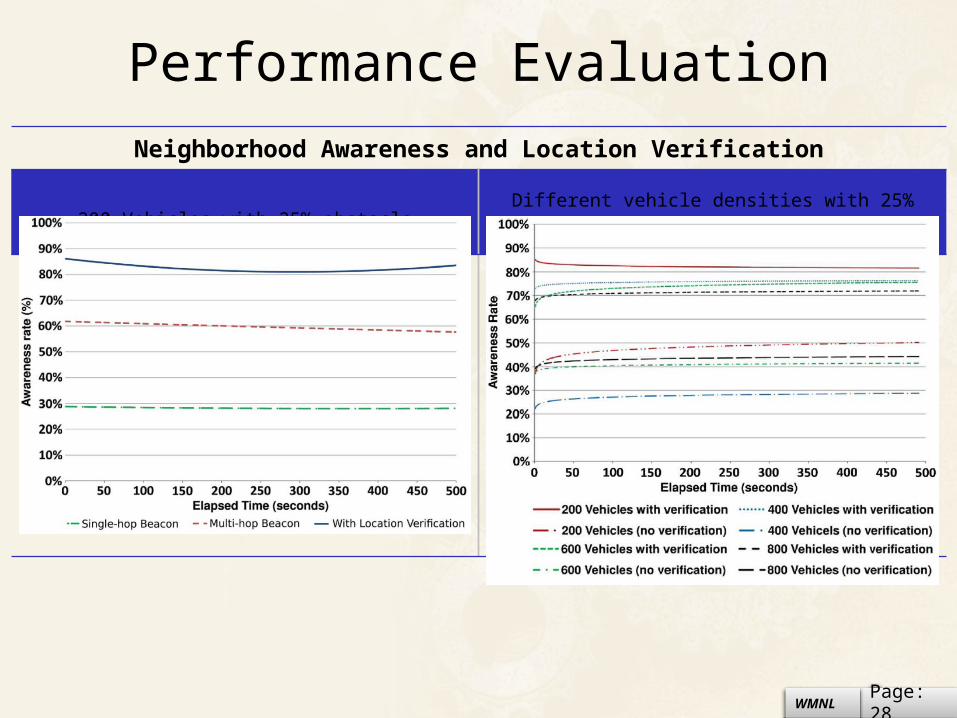
Performance EvaluationNeighborhood Awareness and Location Verification
200 Vehicles with 25% obstacle Different vehicle densities with 25% obstacle
Page: 29WMNL
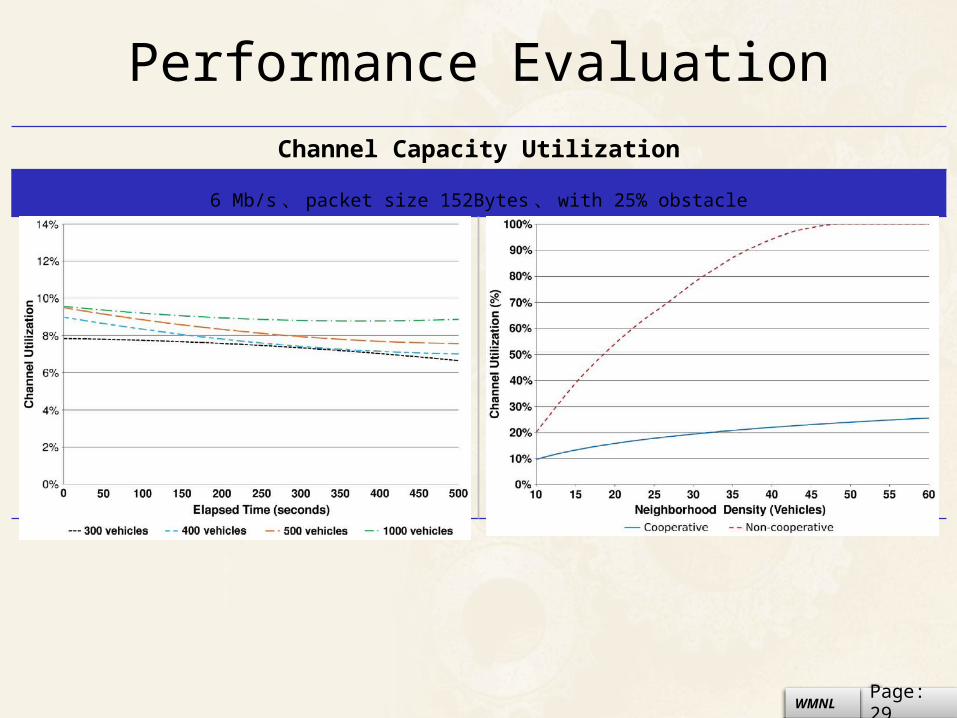
Performance EvaluationChannel Capacity Utilization
6 Mb/s、 packet size 152Bytes、 with 25% obstacle

Page: 30WMNL
Performance Evaluation
Message Delivery Success Rate
Obstacle
Page: 31WMNL
Conclusion
• This paper proposes a novel location verification protocol among cooperative neighboring vehicles for VANETs
– Verifies a vehicle’s announced location.
– Overcome an NLOS condition.
– Increase the vehicles’ rate of neighborhood awareness
– Improve the message delivery success rate
– Providing reliable position information for upper level applications.

Page: 32WMNL
Thanks~~~Thanks~~~Thanks~~~
Related Documents











