Operators ˆ () () Of x gx 2 3 6 d x x dx ˆ () () Of x of x ˆ () () O fr gr ) ) ) ) d d d dx dy dz f(r f(r f(r f(r i j k 2 2 2 sin( ) sin( ) d nx n nx dx - are performed on functions -are performed on vector functions and have directional qualities as well. These are referred to as vector operators. - can obey the Eigen equation, and thus have eigen values and eigen functions. - In general we are concerned with the function that obey this equation.

Operators - are performed on functions -are performed on vector functions and have directional qualities as well. These are referred to as vector operators.
Dec 16, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Operatorsˆ ( ) ( )Of x g x
23 6d
x xdx
ˆ ( ) ( )Of x of x
ˆ ( ) ( )O f r g r
) ) ))d d d
dx dy dz
f(r f(r f(rf(r i j k
2
2
2sin( ) sin( )
dn x n n x
d x
- are performed on functions
-are performed on vector functions and have directional qualities as well. These are referred to as vector operators.
- can obey the Eigen equation, and thus have eigen values and eigen functions.- In general we are concerned with the function that obey this equation.

Classical Mechanics-Position
( )x t
3 2( ) 2 1x t t t
Example
( ) ( ) ( ) ( )t x t y t z t r i j k
2( ) ( 1) 0t t t r i j k
Example
Notice that we are using a function of time to describe the position not somefixed value.
This function tells you the position at any point in time.

Classical Mechanics-Position-3D
ˆ ˆ( ) ( ) ( )x t t x t x r i r i
ˆ ˆ( ) ( ) ( )y t t y t y r j r j
ˆ ˆ( ) ( ) ( )z t t z t z r k r k
ˆ( ) [ ( )]
ˆ ˆ ˆ ( )
( ) ( ) ( )
( ) ( ) ( )
t t
x y z t
t t t
x t y t z t
r r r
i j k r
i r i j r j k r k
i j k
Note that the operator is applied to the position function and the result is the quantity associated with the operator.
Ie. The x operator give you the x component of r(t), this is know as a projection operator.
The vector operator r can be constructed from the projector operators.

Classical Mechanics-Position-3D
2( ) ( 1) 0t t t r i j k
2 2ˆ ( ) ( 1) 0 ( 1) ( )x t t t t x t r i i j k
Example
2ˆ ( ) ( 1) 0 ( )y t t t t y t r j i j k
2ˆ ( ) ( 1) 0 0 ( )z t t t z t r k i j k
2
2
ˆ ˆ ˆ ˆ( ) [ ( )] ( 1) 0
ˆ ˆ ˆ( ) ( ) ( )
( 1) 0
t t x y z t t
x t y t z t
t t
r r r i j k i j k
r i r j r k
i j k

Classical Mechanics-Velocity-1D
( )( )
dx tv t
dt
ˆd
vdt
3 2
2
ˆ( ) ( ) ( )
2 1
6 2
dv t v x t x t
dtd
t tdt
t t
ˆ( ) ( ) ( )d
v t v x t x tdt
Example

Classical Mechanics-Velocity-3D
( ) ( ) ( )( )
dx t dy t dz tt
dt dt dt v i j k
ˆd
vdt
ˆ( ) ( ) ( )d
t v t tdt
v r r
2
2
ˆ( ) ( ) ( 1) 0
( 1) 0
(2 1 0 )
dt v t t t
dtd d dt t
dt dt dtt
v r i j k
i j k
i j k
Example
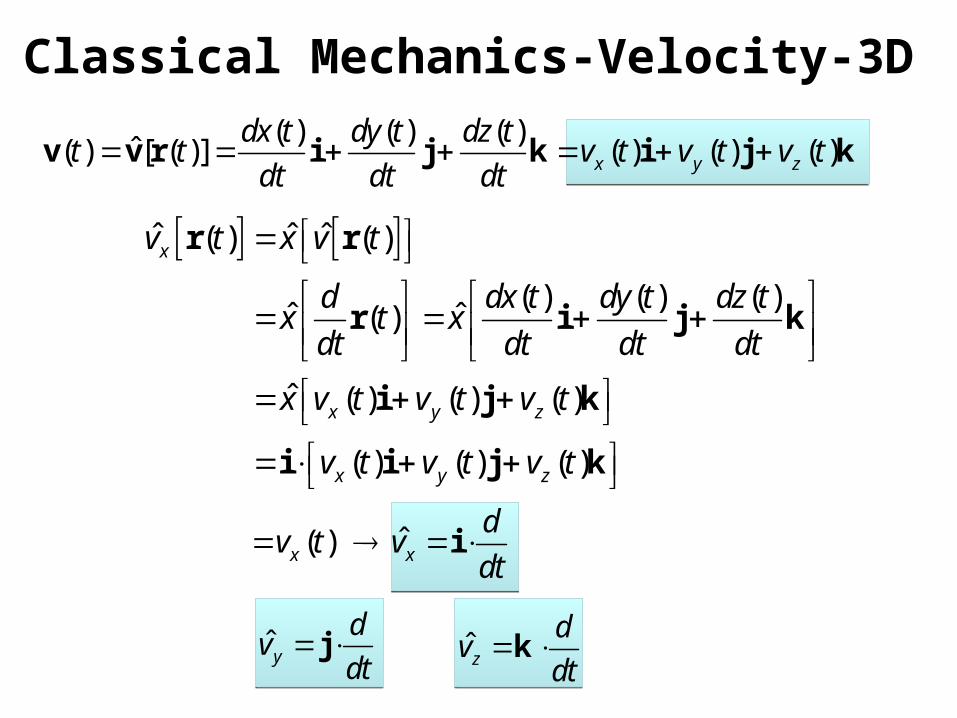
Classical Mechanics-Velocity-3D
( ) ( ) ( )ˆ( ) [ ( )] ( ) ( ) ( )x y z
dx t dy t dz tt t v t v t v t
dt dt dt v v r i j k i j k
ˆ ˆ ˆ( ) ( )
( ) ( ) ( )ˆ ˆ( )
ˆ ( ) ( ) ( )
( ) ( ) ( )
x
x y z
x y z
v t x v t
d dx t dy t dz tx t xdt dt dt dt
x v t v t v t
v t v t v t
r r
r i j k
i j k
i i j k
ˆ( )x x
dv t v
dt i
ˆyd
vdt
j ˆzd
vdt
k

Classical Mechanics-Velocity-3D
ˆ ˆ ˆ ˆ( ) [ ( )] ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x y z
x y z
t t v v v t
d t d t d t
dt dt dt
dx t dy t dz t
dt dt dtv t v t v t
v v r i j k r
r r ri i j j k k
i j k
i j k
ˆ ˆ ˆ ˆx y zv v v v i j k
The corresponding vector operator to velocity can be reconstructed from the projector operators of the components:
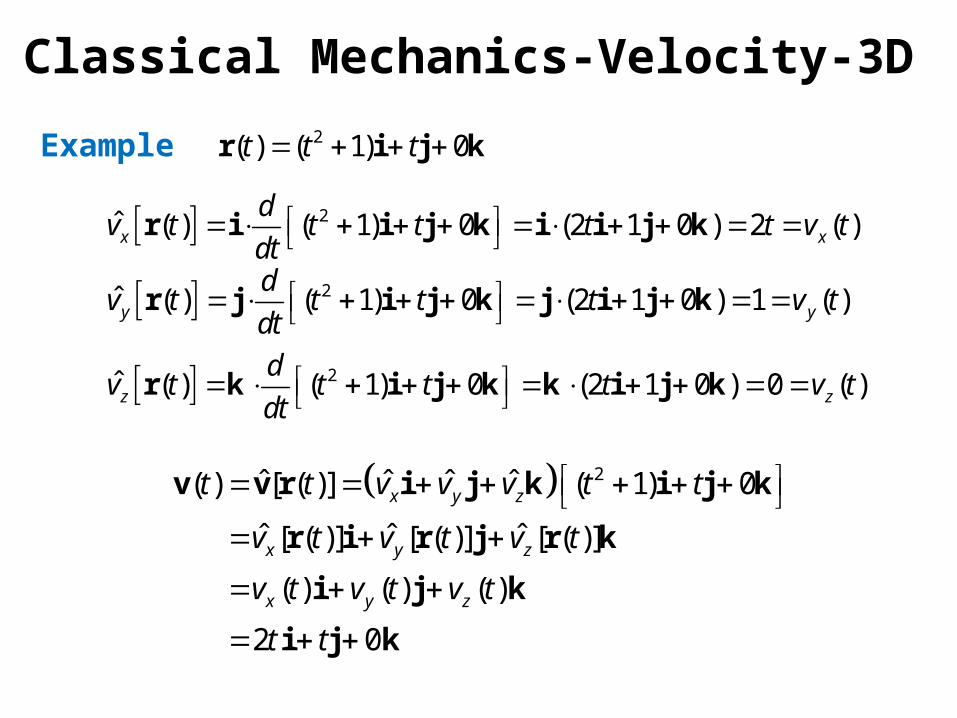
Classical Mechanics-Velocity-3D
Example
2ˆ ( ) ( 1) 0 (2 1 0 ) 2 ( )x x
dv t t t t t v t
dt r i i j k i i j k
2ˆ ( ) ( 1) 0 (2 1 0 ) 1 ( )y y
dv t t t t v t
dt r j i j k j i j k
2( ) ( 1) 0t t t r i j k
2ˆ ( ) ( 1) 0 (2 1 0 ) 0 ( )z z
dv t t t t v t
dt r k i j k k i j k
2ˆ ˆ ˆ ˆ( ) [ ( )] ( 1) 0
ˆ ˆ ˆ[ ( )] [ ( )] [ ( )]
( ) ( ) ( )
2 0
x y z
x y z
x y z
t t v v v t t
v t v t v t
v t v t v t
t t
v v r i j k i j k
r i r j r k
i j k
i j k

Classical Mechanics-Acceleration-1D
2
2
( )( )
d x ta t
dt
2
2ˆ
da
dt
2
2
23 2
2
ˆ( ) ( ) ( )
2 1
12 2
da t a x t x t
dt
dt t
dtt
2
2ˆ( ) ( ) ( )
da t a x t x t
dt
Example

Classical Mechanics-Acceleration-3D
2 2 2
2 2 2
( ) ( ) ( )( )
d x t d y t d y tt
dt dt dt a i j k
2
2ˆ
da
dt
2
2ˆ( ) ( ) ( )
dt a t t
dt a r r
2
22
ˆ ( ) ( 1) 0
(2 0 0 ) ( )
da t t t
dtt
r i j k
i j k a
Example
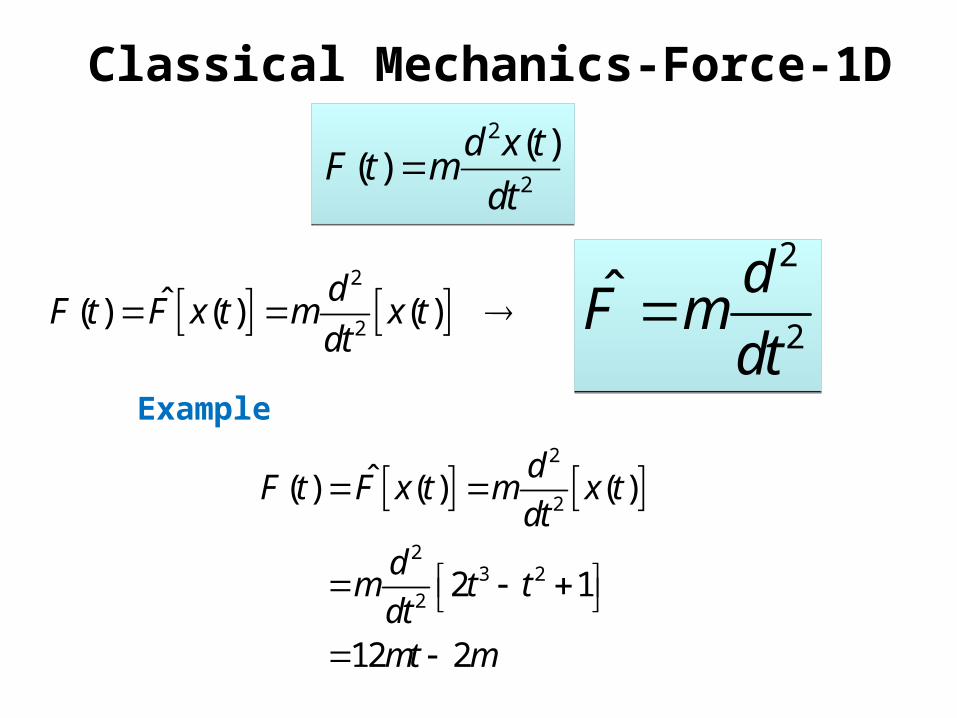
Classical Mechanics-Force-1D2
2
( )( )
d x tF t m
dt
2
2ˆ dF m
dt
2
2
23 2
2
ˆ( ) ( ) ( )
2 1
12 2
dF t F x t m x t
dt
dm t tdtmt m
2
2ˆ( ) ( ) ( )
dF t F x t m x t
dt
Example

Classical Mechanics-Force-3D2 2 2
2 2 2
( ) ( ) ( )( )
d x t d y t d y tt m
dt dt dt
F i j k
2
2ˆ dF m
dt
2
2ˆ( ) ( ) ( )
dt F t t
dt F r r
2
22
ˆ( ) ( ) ( 1) 0
2 0 0
dt F t m t t
dtm
F r i j k
i j k
Example

Impulse and Momentum2
2
( )( ) ( )
d x tF t m ma t
d t
ˆˆ ˆ( ) ( ) ( )p x t F x t dt mv x t
2
2
( )( ) ( )
d x tF t dt m dt mdv t
d t MomentumImpulse
2
2
( )( )
d x tF t dt F t m dt m v F t m v
d t
( ) ( ) ( )p t F t dt mv t In general
For a constant force
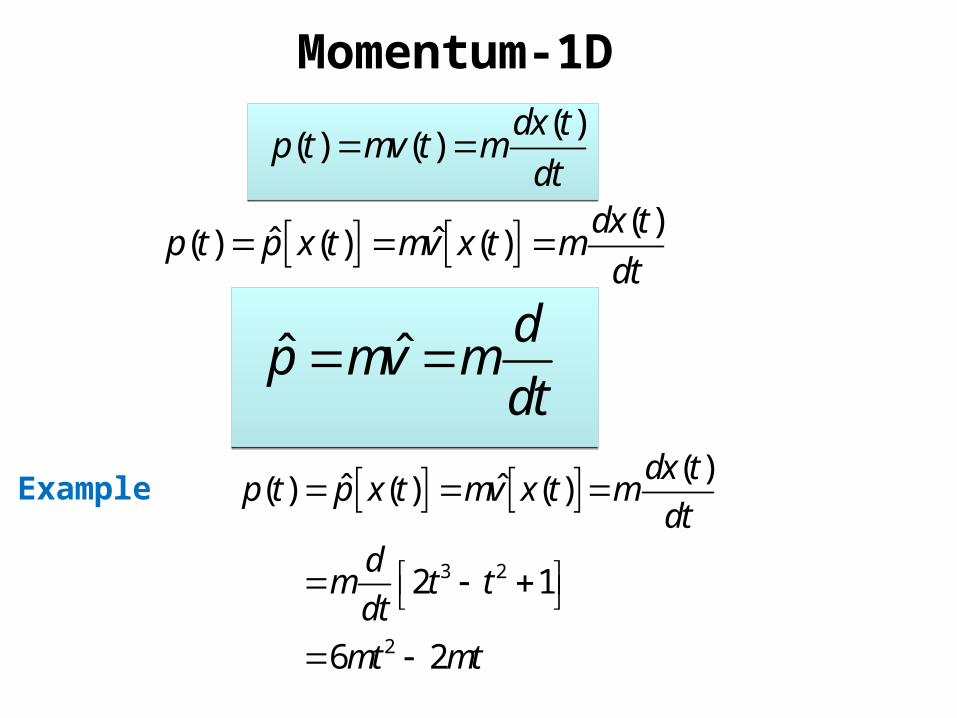
Momentum-1D( )
( ) ( )dx t
p t mv t mdt
ˆ ˆd
p mv mdt
( )ˆ ˆ( ) ( ) ( )
dx tp t p x t mv x t m
dt
3 2
2
( )ˆ ˆ( ) ( ) ( )
2 1
6 2
dx tp t p x t mv x t m
dtd
m t tdt
mt mt
Example

Momentum-3D
( ) ( ) ( ) ( )( ) ( )
d t dx t dy t dz tt m t m m m m
dt dt dt dt
rp v i j k
ˆ ˆd
p mv mdt
( )ˆ ˆ( ) ( ) ( )
d tt p t mv t m
dt
rp r r
2
ˆ ˆ( ) ( ) ( )
( 1) 0
2 0
t p t mv t
dm t tdtmt m
p r r
i j k
i j k
Example

Impulse-1D
( ) ( )p t F t dt( )
( )dV t
F tdx
ˆ ˆˆd
p Fdt Vdtdx
( )( )
dV tp t dt
dx
ˆˆ( ) ( ( )) ( ( ))
ˆ( ( ))
p t p x t F x t dt
dV x tdt
dx
Force can be thought of asa change in potential energy with change in position

Impulse-1D
2
3 22
3 2
2
ˆˆ( ) ( ) ( ) 2 1
2 1
6 2
dp t p x t F x t dt m t t dt
dtd
m t tdt
mt mt
2
00
( ) 2ˆ ( ) 2 ( ) / 2 cos( ) sin( )
( )
d kx t kxp x t dt kx t dt kx t dt t
dx t
Examples
20
1 ( ( ))( ( )) ( ) ( ( )) ( ) cos( )
2 ( )
dV x tV x t kx t F x t where x t x t
dx t
i) In terms of the Force operator:
ii) In terms of the Potential operator:

Impulse-3D
( ) ( )t t dtp F ( )t V t F
ˆˆ Vdt p
( ) ( )t V t dt p
ˆ ˆˆ( ) ( ( )) ( ( )) ( ( ))t t t dt V t dt p p r F r r

Angular Momentum
( ) ( )t t L r p
( ) ( ) ( ) ( ) ( ) ( )x y zx t y t z t p t p t p t L
( ) ( ) ( )
( ) ( ) ( )x y z
x t y t z t
p x p t p t
i j k
L

Angular Momentum
x y zL L L L i j k
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
x z y
y x z
z x y
L y t p t z t p t
L z t p t x t p t
L y t p t x t p t

Angular Momentum
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
x z y
y x z
z y x
L t y t p t z t p t
L t z t p t x t p t
L t x t p t y t p t
ˆˆˆ ˆ ˆ ˆ ˆˆ ˆ
ˆ ˆˆ ˆ ˆˆ ˆˆ ˆ
ˆ ˆˆ ˆˆ ˆ ˆ ˆ ˆ
x z y
y x z
z y x
dz dyL yp zp m y z
dt dt
dx dzL zp xp m z x
dt dt
dy dxL xp yp m x y
dt dt
ˆ ˆ ˆ ˆx y zL L L L i j k

Kinetic Energy22 2( ) ( ) ( )
( )2 2 2
mv t m dx t p tK t
dt m
( ) ( ) ( ) ( ) ( ) ( )( )
2 2 2
m d t d t m t t t tK t
dt dt m
r r v v p p
2 22 ˆˆ ˆ
2 2
m d pK mv
dt m
ˆ ˆ ˆ ˆˆ ˆˆ2 2 2
m d d mK
dt dt m
r r v v p p
22 2ˆ ˆ[ ( )] ( ) [ ( )]ˆ ( )
2 2 2
mv x t m dx t p x tK x t
dt m

Potential Energy
( ) ( )V d r F r r( ) ( )V t F t dx
( )( )
dV tF t
dx ( ) ( )V F r r
Hooks Law
( ) ( )F t kx t
2( ) ( )2
kV t x t
Coulombs Law2
2( )
4 ( )
zeF t
x t
2
( )4 ( )
zeV t
x t
ˆ ˆ( ( )) ( ( )) ( )V x t F x t dx t ˆ ˆV Fdx
ˆ ˆ( ( )) ( ( ))V t t d r F r r
ˆ ˆV d F r

Conservation of Energy
( ) ( )E K t V t Total energy remains constant, as long as V is not an explicit function of time. (i.e V(x(t)))
ˆ ˆ ˆ ˆ( ) ( ) ( ) 0dE d d
K x t V x t K V x tdt dt dt
ˆ ˆ ˆ ˆ( ) ( ) ( ) 0dE d d
K t V t K V tdt dt dt
r r r
2 ˆ ˆˆˆ ˆ ˆ ˆ ˆ( ) ( )2 2
pH K V V x V
m m
p pr
Hamiltonian

Conservation of Energy-Hook’s Law
ˆ ˆ ( ) 0 ?dE d
K V x tdt dt
2( ) ( )
2
kfor V x x t
2 2ˆ ( ) ( )
2 2
p x t k x tdE d
dt dt m
22
2
2
1 ( ) ( )2 ( )
2 2
( ) ( ) ( )2 ( )
2
d dx t k dx tm x t
m dt dt dt
m dx t d x t dx tkx t
dt dt dt
21 1ˆ ˆ( ) ( ) ( )
2 2
d dp x t p x t k x t
m dt dt
2
2
( ) ( )( )
( )( ) ( ) 0
dx t d x tm kx t
dt dt
dx tma t F t
dt
Since: Newtons Law F – ma = 0
1( ) ( ) 2 ( ) ( )
2 2
d d d k dm x t m x t x t x t
m dt dt dt dt
Related Documents











