Operations Research for Healthcare ‐ lecture notes (Part 3) IUMS‐1397 © Dr. Ahmad Reza Pourghaderi 1 OPERATIONS RESEARCH for HEALTHCARE (Part 3) SOLUTION METHODS AHMAD REZA POURGHADERI (PH.D.) ASSISTANT PROFESSOR OF HEALTHCARE SYSTEMS ENGINEERING ISFAHAN UNIVERSITY OF MEDICAL SCIENCES HTTP://POURGHADERI.COM/ Part : Learning Objectives Giving a general understanding of a variety of methods to solve MP models. Discuss the complexity of solving a mathematical programming model and introduce tractable (easy) versus intractable (NP) problems. Describe two main solution approaches: Exact and Approximate algorithms. Introduce the main exact algorithms for LP and IP models. Introduce several famous metaheuristic methods and categorize them in two groups of single‐solution and population‐based. Explain post optimality (what‐if) analysis and highlight the sensitivity analysis. Explain the concepts of robust optimization. 2 ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM After a mathematical model is formulated for the problem under consideration, the next phase in an OR study is to develop a procedure (usually a computer‐ based procedure) for deriving solutions to the problem from this model. You might think that this must be the major part of the study, but actually it is not in most cases. Sometimes, in fact, it is a relatively simple step, in which one of the standard algorithms (systematic solution procedures) of OR is applied on a computer by using one of a number of readily available software packages. DERIVING SOLUTIONS FROM THE MODEL 3 ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 1
OPERATIONS RESEARCH for HEALTHCARE
(Part 3)SOLUTION METHODS
AHMAD REZA POURGHADERI (PH .D. )
ASS ISTANT PROFESSOR OF HEALTHCARE SYSTEMS ENGINEERING
ISFAHAN UNIVERS ITY OF MEDICAL SC IENCES
HTTP : / /POURGHADERI .COM/
Part : Learning Objectives
Giving a general understanding of a variety of methods to solve MP models.
Discuss the complexity of solving a mathematical programming model and introduce
tractable (easy) versus intractable (NP) problems.
Describe two main solution approaches: Exact and Approximate algorithms.
Introduce the main exact algorithms for LP and IP models.
Introduce several famous metaheuristic methods and categorize them in two groups
of single‐solution and population‐based.
Explain post optimality (what‐if) analysis and highlight the sensitivity analysis.
Explain the concepts of robust optimization.
2ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
After a mathematical model is formulated for the problem under consideration,
the next phase in an OR study is to develop a procedure (usually a computer‐
based procedure) for deriving solutions to the problem from this model.
You might think that this must be the major part of the study, but actually it is
not in most cases. Sometimes, in fact, it is a relatively simple step, in which one
of the standard algorithms (systematic solution procedures) of OR is applied on a
computer by using one of a number of readily available software packages.
DERIVING SOLUTIONS FROM THE MODEL
3ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 2
A common theme in OR is the search for an optimal, or best solution.
It needs to be recognized that these solutions are optimal only with respect to
the model being used. Since the model necessarily is an idealized rather than an
exact representation of the real problem, there cannot be any utopian
guarantee that the optimal solution for the model will prove to be the best
possible solution that could have been implemented for the real problem.
If the model is well formulated and tested, the resulting solution should tend to
be a good approximation to an ideal course of action for the real problem.
DERIVING SOLUTIONS FROM THE MODEL
4ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Exact Vs Approximate Solution Algorithms
Exact algorithms can find the optimum solution with precision.
Approximate algorithms can find a near optimum solution.
The main difference is that exact algorithms apply in "easy (tractable)"
problems. What makes a problem "easy" is that it can be solved in
reasonable time and the computation time doesn't scale up exponentially
if the problem gets bigger. This class of problems is known
as P(Deterministic Polynomial Time). Problems of this class are used to be
optimized using exact algorithms. For every other class of problems (NP‐
hard, NP‐Complete) approximate algorithms are preferred.
5ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
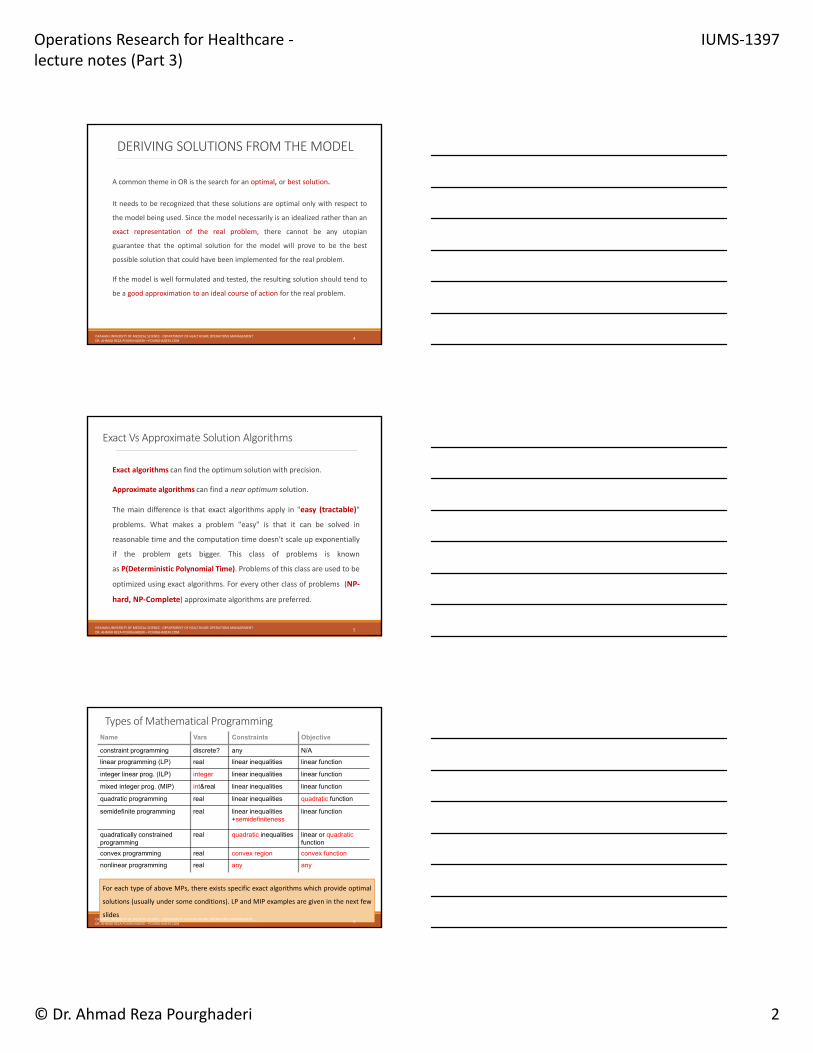
Types of Mathematical ProgrammingName Vars Constraints Objective
constraint programming discrete? any N/A
linear programming (LP) real linear inequalities linear function
integer linear prog. (ILP) integer linear inequalities linear function
mixed integer prog. (MIP) int&real linear inequalities linear function
quadratic programming real linear inequalities quadratic function
semidefinite programming real linear inequalities +semidefiniteness
linear function
quadratically constrained programming
real quadratic inequalities linear or quadraticfunction
convex programming real convex region convex function
nonlinear programming real any any
For each type of above MPs, there exists specific exact algorithms which provide optimal
solutions (usually under some conditions). LP and MIP examples are given in the next few
slides6
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM

Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 3
7
• Simplex Algorithm: It is developed by George Dantzig in 1947, solves LP
problems by constructing a feasible solution at a vertex of the polytope and
then walking along a path on the edges of the polytope to vertices with non-
decreasing values of the objective function until an optimum is reached for
sure.
• Criss‐cross Algorithm: It is like the Simplex a basis-exchange algorithm that
pivots between bases. However, the criss-cross algorithm need not maintain
feasibility, but can pivot rather from a feasible basis to an infeasible basis.
• Interior point Algorithm: In contrast to the simplex algorithm, which finds an
optimal solution by traversing the edges between vertices on a polyhedral
set, interior-point methods move through the interior of the feasible region.
• Other LP algorithms: Karmarkar's algorithm, Khachiyan's algorithm, …
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
8
The current opinion is that the efficiencies of good implementations of
simplex‐based methods are the best similar for routine applications of linear
programming.
However, for specific types of LP problems, it may be that one type of solver is
better than another (sometimes much better).
The structure of the solutions generated by interior point methods versus
simplex‐based methods are significantly different with the support set of active
variables being typically smaller for the later one.
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
9
One class of algorithms are Cutting Plane methods which work by solving the LP
relaxation and then adding linear constraints that drive the solution towards
being integer without excluding any integer feasible points.
Another class of algorithms are variants of the branch and bound method. A B&B
algorithm consists of a systematic enumeration of candidate solutions. Before
enumerating the candidate solutions of a branch, the branch is checked against
upper and lower estimated bounds on the optimal solution, and is discarded if it
cannot produce a better solution than the best one found so far by the algorithm.
the branch and cut method that combines both branch and bound and cutting
plane methods.
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM

Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 4
Approximate Algorithms
Heuristic procedures (i.e., intuitively designed procedures that do not
guarantee an optimal solution) to find a good sub‐optimal solution.
This is most often the case when the time or cost required to find an
optimal solution for an adequate model of the problem would be very
large. In recent years, great progress has been made in developing
efficient and effective heuristic procedures (including so‐called
metaheuristics), so their use is continuing to grow.
10ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Herbert Simon (Nobel Laureate in economics) points out that satisficing is much more
prevalent than optimizing in actual practice.
Satisficing Theory (Simon 1947) is a decision‐making strategy that entails searching through
the available alternatives until an acceptability threshold is met.
Simon is describing the tendency of managers to seek a solution that is “good enough” for
the problem at hand. Rather than trying to develop an overall measure of performance to
optimally reconcile conflicts between various desirable objectives.
One of England’s OR leaders, Samuel Eilon, “Optimizing is the science of the ultimate;
satisficing is the art of the feasible.
Satisficing vs Optimizing
11ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Imagination is more important than
knowledge, for knowledge is limited
Whereas imagination embrace the entire
world, stimulating progress giving birth to
evolution.
Albert Einstein
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 5
Metaheuristic Algorithms
A metaheuristic is a higher‐level procedure or heuristic designed to find, generate, or
select a heuristic (partial search algorithm) that may provide a sufficiently good solution
to an optimization problem, especially with incomplete or imperfect information or
limited computation capacity.
These are properties that characterize most metaheuristics:
Metaheuristics are strategies that guide the search process.
The goal is to efficiently explore the search space in order to find near–optimal solutions.
Techniques which constitute metaheuristic algorithms range from simple local search
procedures to complex learning processes.
Metaheuristic algorithms are approximate and usually non‐deterministic.
Metaheuristics are not problem‐specific.
13ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Single‐solution vs Population‐based Metaheuristics
Single solution approaches focus on modifying and improving a single
candidate solution; single solution metaheuristics include simulated
annealing, Tabu search, iterated local search, variable neighborhood
search, and guided local search.
Population‐based approaches maintain and improve multiple candidate
solutions, often using population characteristics to guide the search;
population based metaheuristics include evolutionary computation,
genetic algorithms, and particle swarm optimization.
14ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
A Voluntary Homework
Build Groups of two students
Choose a metaheuristic method in consultation with the lecturer.
Prepare slides with a simple example
Check it with the lecturer and improve it if required.
Teach the selected metaheuristic for your classmates
15ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM

Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 6
16
The discussion thus far has implied that an OR study seeks to find only one
solution, which may or may not be required to be optimal. In fact, this usually is
not the case. An optimal solution for the original model may be far from ideal
for the real problem, so additional analysis is needed.
Therefore, post-optimality analysis (analysis done after finding an optimal
solution) is a very important part of most OR studies. This analysis also is
sometimes referred to as what-if analysis because it involves addressing
some questions about what would happen to the optimal solution if different
assumptions are made about future conditions. These questions often are
raised by the managers who will be making the ultimate decisions rather than
by the OR team.
Post‐optimality Analysis
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
17
Determines which parameters of the model are most critical (the “sensitive
parameters”) in determining the solution.
A common definition of sensitive parameter: For a mathematical model with
specified values for all its parameters, the model’s sensitive parameters are
the parameters whose value cannot be changed without changing the optimal
solution.
Identifying the sensitive parameters is important, because this identifies the
parameters whose value must be assigned with special care to avoid distorting
the output of the model.
Sensitivity Analysis
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
18
Determines which parameters of the model are most critical (the “sensitive The
value assigned to a parameter commonly is just an estimate of some quantity
(e.g., unit profit) whose exact value will become known only after the solution
has been implemented. Therefore, after the sensitive parameters are
identified, special attention is given to estimating each one more closely, or at
least its range of likely values.
One then seeks a solution that remains a particularly good one for all the
various combinations of likely values of the sensitive parameters.
Robust optimization is a field of optimization theory that deals with optimization
problems in which a certain measure of robustness is sought against
uncertainty that can be represented as deterministic variability in the value of
the parameters of the problem itself and/or its solution.
Sensitivity Analysis
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 7
Linear Programming
• THE GRAPHICAL SOLUTION OF TWO‐VARIABLE L INEAR PROGRAMMING PROBLEMS
• THE SIMPLEX ALGORITHM (PREVIEW)
19ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
What is a linear programming problem?
A linear programming problem (LP) is an optimization problem for which we do the
following:
We attempt to maximize (or minimize) a linear function of the decision variables.
The function that is to be maximized or minimized is called the objective function.
The values of the decision variables must satisfy a set of constraints. Each constraint
must be a linear equation or linear inequality.
A sign restriction is associated with each variable. For any variable 𝑥 , the sign
restriction specifies that xi must be either nonnegative (𝑥 0) or unrestricted in sign
(urs).
20ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Review: Linear Function/Inequality
21
A function f(x1, x2, …, xn) of x1, x2, …, xn is a linear function if
and only if for some set of constants, c1, c2, …, cn,
f(x1, x2, …, xn) = c1x1 + c2x2 + … + cnxn.
For any linear function f(x1, x2, …, xn) and any number b, the
inequalities f(x1, x2, …, xn) ≤ b and f(x1, x2, …, xn) ≥ b are
linear inequalities.
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 8
The Proportionality and Additivity Assumptions
The fact that the objective function for an LP must be a linear
function of the decision variables has two implications.
1. The contribution of the objective function from each decision
variable is proportional to the value of the decision variable.
2. The contribution to the objective function for any variable is
independent of the values of the other decision variables.
22ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
The Proportionality and Additivity Assumptions
Analogously, the fact that each LP constraint must be a linear
inequality or linear equation has two implications.
1. The contribution of each variable to the left‐hand side of
each constraint is proportional to the value of the
variable.
2. The contribution of a variable to the left‐hand side of
each constraint is independent of the values of other
variable.
23ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
The Divisibility and Certainty Assumptions
The divisibility assumption requires that each decision
variable be permitted to assume fractional values.
The certainty assumption is that each parameter (objective
function coefficients, right‐hand side, and technological
coefficients) are known with certainty.
24ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 9
Fundamental concepts
25
The feasible region for an LP is the set of all points
that satisfies all the LP’s constraints and sign
restrictions.
For a maximization problem, an optimal solution to
an LP is a point in the feasible region with the largest
objective function value. Similarly, for a minimization
problem, an optimal solution is a point in the feasible
region with the smallest objective function value.
ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
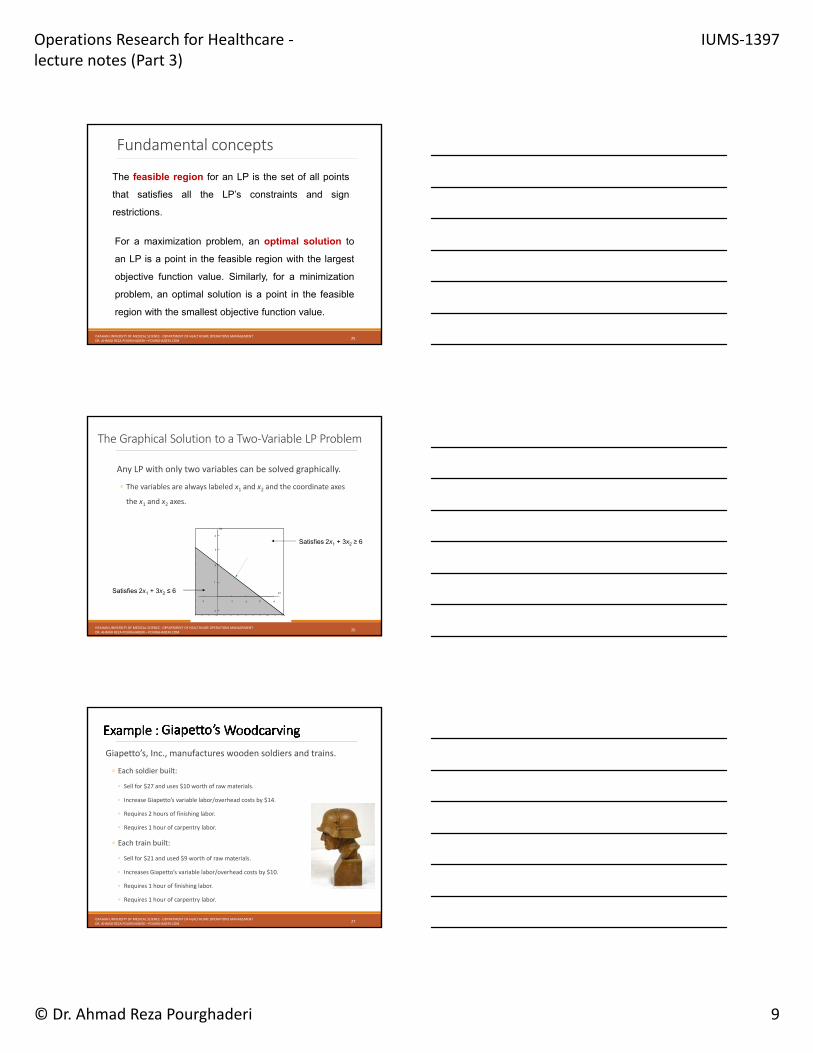
The Graphical Solution to a Two‐Variable LP Problem
Any LP with only two variables can be solved graphically.
◦ The variables are always labeled x1 and x2 and the coordinate axes
the x1 and x2 axes.
Satisfies 2x1 + 3x2 ≥ 6
Satisfies 2x1 + 3x2 ≤ 6 X1
1 2 3 4
1
2
3
4
X2
-1
-1
26ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Giapetto’s, Inc., manufactures wooden soldiers and trains.
◦ Each soldier built:
◦ Sell for $27 and uses $10 worth of raw materials.
◦ Increase Giapetto’s variable labor/overhead costs by $14.
◦ Requires 2 hours of finishing labor.
◦ Requires 1 hour of carpentry labor.
◦ Each train built:
◦ Sell for $21 and used $9 worth of raw materials.
◦ Increases Giapetto’s variable labor/overhead costs by $10.
◦ Requires 1 hour of finishing labor.
◦ Requires 1 hour of carpentry labor.
27ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 10
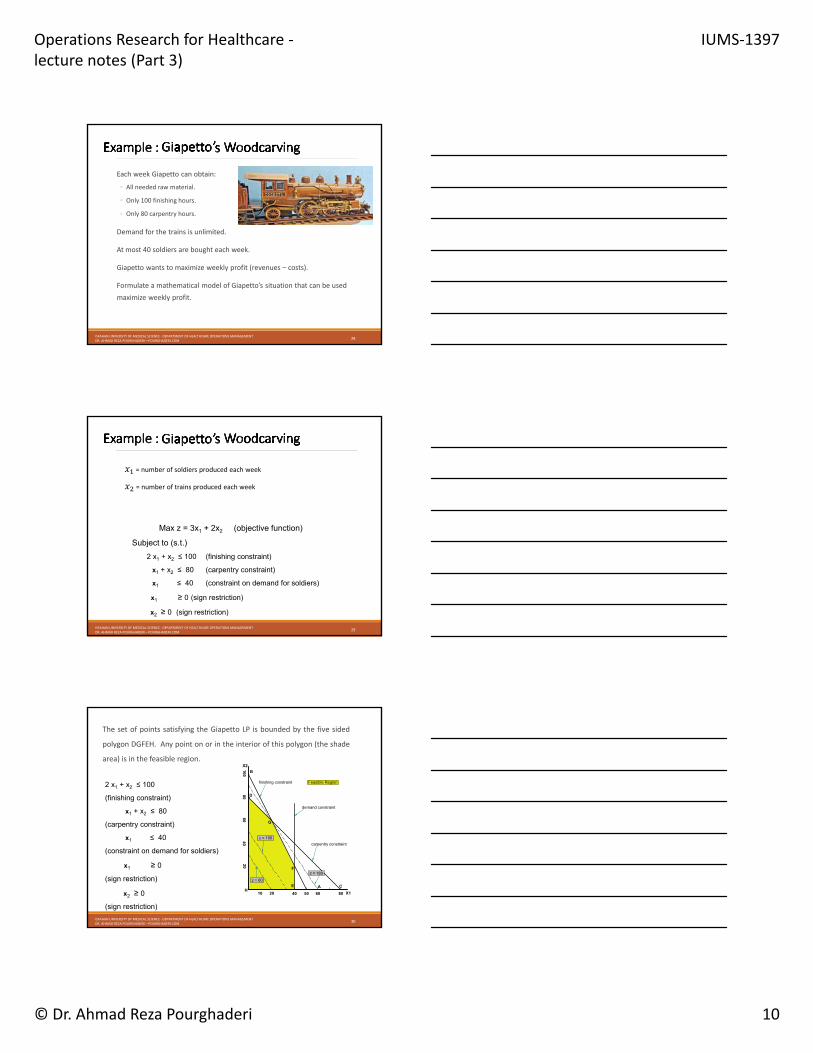
Each week Giapetto can obtain:
◦ All needed raw material.
◦ Only 100 finishing hours.
◦ Only 80 carpentry hours.
Demand for the trains is unlimited.
At most 40 soldiers are bought each week.
Giapetto wants to maximize weekly profit (revenues – costs).
Formulate a mathematical model of Giapetto’s situation that can be used
maximize weekly profit.
28ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
𝑥 = number of soldiers produced each week
𝑥 = number of trains produced each week
Max z = 3x1 + 2x2 (objective function)
Subject to (s.t.)
2 x1 + x2 ≤ 100 (finishing constraint)
x1 + x2 ≤ 80 (carpentry constraint)
x1 ≤ 40 (constraint on demand for soldiers)
x1 ≥ 0 (sign restriction)
x2 ≥ 0 (sign restriction)
29ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
The set of points satisfying the Giapetto LP is bounded by the five sided
polygon DGFEH. Any point on or in the interior of this polygon (the shade
area) is in the feasible region.
X1
X2
10 20 40 50 60 80
20
406
08
0100
finishing constraint
carpentry constraint
demand constraint
z = 60
z = 100
z = 180
Feasible Region
G
A
B
C
D
E
F
H
2 x1 + x2 ≤ 100
(finishing constraint)
x1 + x2 ≤ 80
(carpentry constraint)
x1 ≤ 40
(constraint on demand for soldiers)
x1 ≥ 0
(sign restriction)
x2 ≥ 0
(sign restriction)
30ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 11
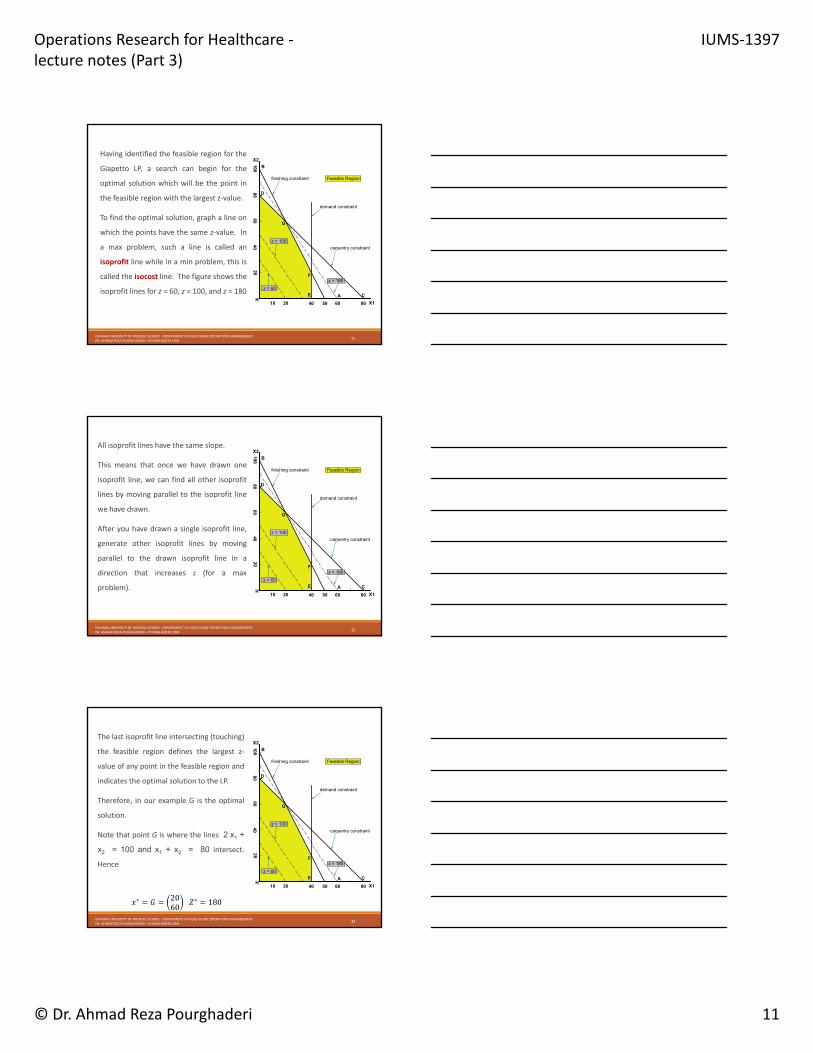
Having identified the feasible region for the
Giapetto LP, a search can begin for the
optimal solution which will be the point in
the feasible region with the largest z‐value.
To find the optimal solution, graph a line on
which the points have the same z‐value. In
a max problem, such a line is called an
isoprofit line while in a min problem, this is
called the isocost line. The figure shows the
isoprofit lines for z = 60, z = 100, and z = 180
X1
X2
10 20 40 50 60 80
2040
6080
100
finishing constraint
carpentry constraint
demand constraint
z = 60
z = 100
z = 180
Feasible Region
G
A
B
C
D
E
F
H
31ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
All isoprofit lines have the same slope.
This means that once we have drawn one
isoprofit line, we can find all other isoprofit
lines by moving parallel to the isoprofit line
we have drawn.
After you have drawn a single isoprofit line,
generate other isoprofit lines by moving
parallel to the drawn isoprofit line in a
direction that increases z (for a max
problem).X1
X2
10 20 40 50 60 80
2040
6080
100
finishing constraint
carpentry constraint
demand constraint
z = 60
z = 100
z = 180
Feasible Region
G
A
B
C
D
E
F
H
32ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
The last isoprofit line intersecting (touching)
the feasible region defines the largest z‐
value of any point in the feasible region and
indicates the optimal solution to the LP.
Therefore, in our example G is the optimal
solution.
Note that point G is where the lines 2 x1 +
x2 = 100 and x1 + x2 = 80 intersect.
Hence
X1
X2
10 20 40 50 60 80
2040
6080
100
finishing constraint
carpentry constraint
demand constraint
z = 60
z = 100
z = 180
Feasible Region
G
A
B
C
D
E
F
H
𝑥∗ 𝐺 2060
𝑍∗ 180
33ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 12
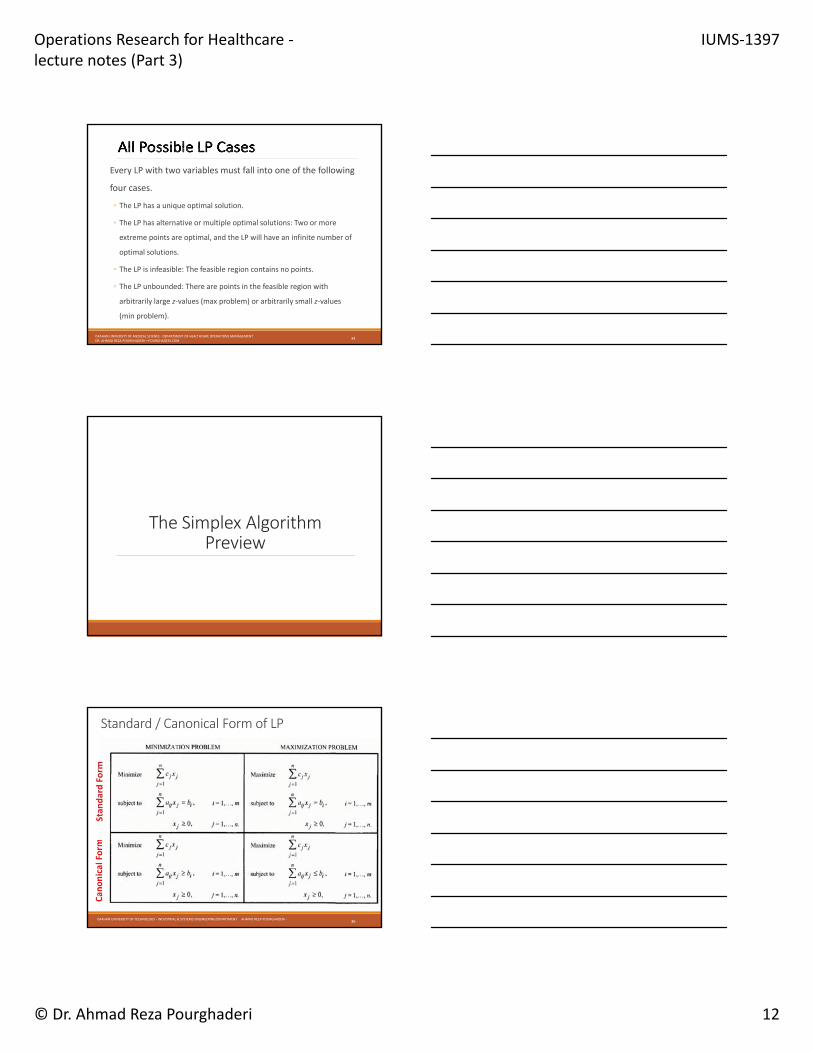
Every LP with two variables must fall into one of the following
four cases.
◦ The LP has a unique optimal solution.
◦ The LP has alternative or multiple optimal solutions: Two or more
extreme points are optimal, and the LP will have an infinite number of
optimal solutions.
◦ The LP is infeasible: The feasible region contains no points.
◦ The LP unbounded: There are points in the feasible region with
arbitrarily large z‐values (max problem) or arbitrarily small z‐values
(min problem).
34ISFAHAN UNIVERSITY OF MEDICAL SCIENCE ‐ DEPARTMENT OF HEALTHCARE OPERATIONS MANAGEMENT DR. AHMAD REZA POURGHADERI – POURGHADERI.COM
The Simplex Algorithm Preview
Standard / Canonical Form of LP
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
36
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 13
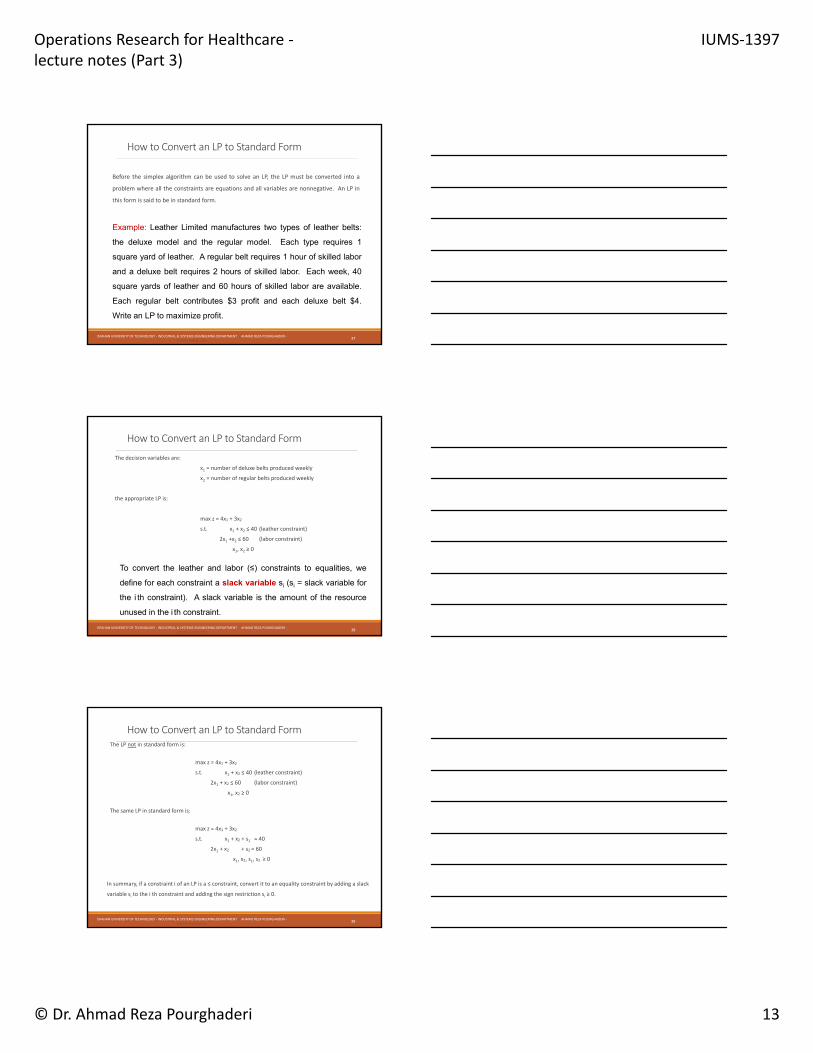
How to Convert an LP to Standard Form
Before the simplex algorithm can be used to solve an LP, the LP must be converted into a
problem where all the constraints are equations and all variables are nonnegative. An LP in
this form is said to be in standard form.
Example: Leather Limited manufactures two types of leather belts:
the deluxe model and the regular model. Each type requires 1
square yard of leather. A regular belt requires 1 hour of skilled labor
and a deluxe belt requires 2 hours of skilled labor. Each week, 40
square yards of leather and 60 hours of skilled labor are available.
Each regular belt contributes $3 profit and each deluxe belt $4.
Write an LP to maximize profit.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
37
The decision variables are:
x1 = number of deluxe belts produced weekly
x2 = number of regular belts produced weekly
the appropriate LP is:
max z = 4x1 + 3x2
s.t. x1 + x2 ≤ 40 (leather constraint)
2x1 +x2 ≤ 60 (labor constraint)
x1, x2 ≥ 0
To convert the leather and labor (≤) constraints to equalities, we
define for each constraint a slack variable si (si = slack variable for
the i th constraint). A slack variable is the amount of the resource
unused in the i th constraint.
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
38
The LP not in standard form is:
max z = 4x1 + 3x2
s.t. x1 + x2 ≤ 40 (leather constraint)
2x1 + x2 ≤ 60 (labor constraint)
x1, x2 ≥ 0
The same LP in standard form is:
max z = 4x1 + 3x2
s.t. x1 + x2 + s1 = 40
2x1 + x2 + s2 = 60
x1, x2, s1, s2 ≥ 0
In summary, if a constraint i of an LP is a ≤ constraint, convert it to an equality constraint by adding a slack
variable si to the i th constraint and adding the sign restriction si ≥ 0.
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
39
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 14
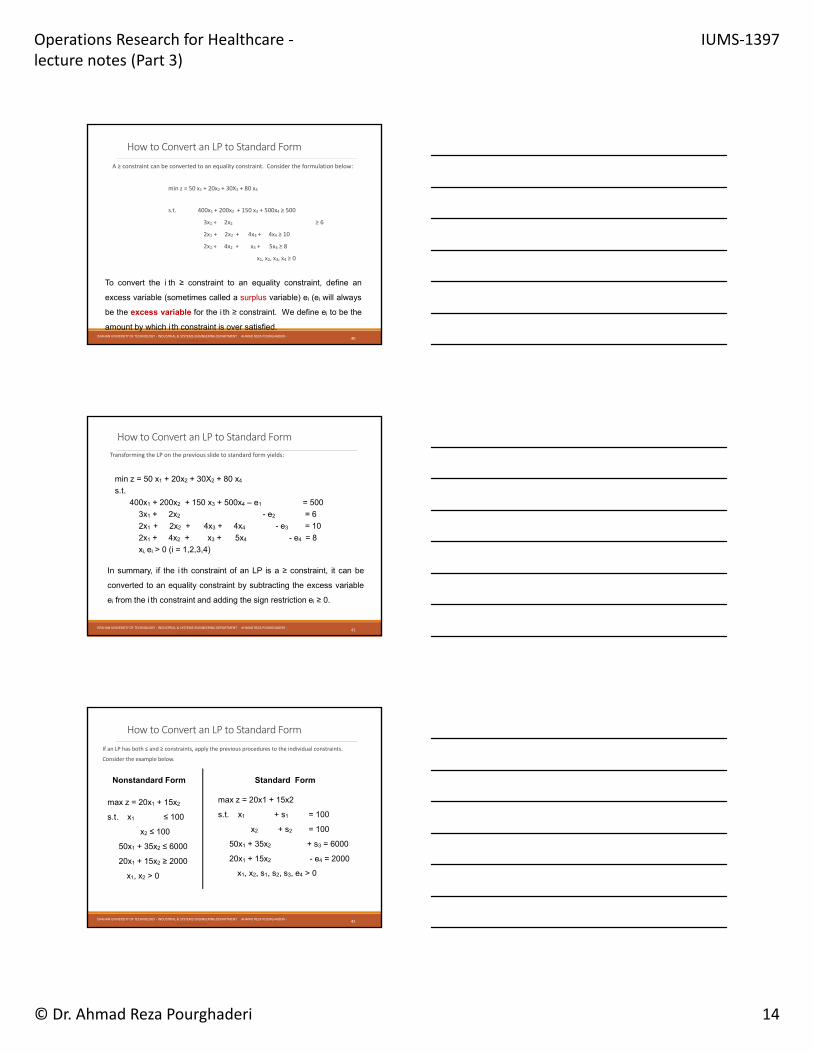
A ≥ constraint can be converted to an equality constraint. Consider the formulation below:
min z = 50 x1 + 20x2 + 30X2 + 80 x4
s.t. 400x1 + 200x2 + 150 x3 + 500x4 ≥ 500
3x1 + 2x2 ≥ 6
2x1 + 2x2 + 4x3 + 4x4 ≥ 10
2x1 + 4x2 + x3 + 5x4 ≥ 8
x1, x2, x3, x4 ≥ 0
To convert the i th ≥ constraint to an equality constraint, define an
excess variable (sometimes called a surplus variable) ei (ei will always
be the excess variable for the i th ≥ constraint. We define ei to be the
amount by which i th constraint is over satisfied.
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
40
Transforming the LP on the previous slide to standard form yields:
min z = 50 x1 + 20x2 + 30X2 + 80 x4
s.t.
400x1 + 200x2 + 150 x3 + 500x4 – e1 = 500
3x1 + 2x2 - e2 = 6
2x1 + 2x2 + 4x3 + 4x4 - e3 = 10
2x1 + 4x2 + x3 + 5x4 - e4 = 8
xi, ei > 0 (i = 1,2,3,4)
In summary, if the i th constraint of an LP is a ≥ constraint, it can be
converted to an equality constraint by subtracting the excess variable
ei from the i th constraint and adding the sign restriction ei ≥ 0.
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
41
If an LP has both ≤ and ≥ constraints, apply the previous procedures to the individual constraints.
Consider the example below.
max z = 20x1 + 15x2
s.t. x1 ≤ 100
x2 ≤ 100
50x1 + 35x2 ≤ 6000
20x1 + 15x2 ≥ 2000
x1, x2 > 0
max z = 20x1 + 15x2
s.t. x1 + s1 = 100
x2 + s2 = 100
50x1 + 35x2 + s3 = 6000
20x1 + 15x2 - e4 = 2000
x1, x2, s1, s2, s3, e4 > 0
Nonstandard Form Standard Form
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
42
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 15
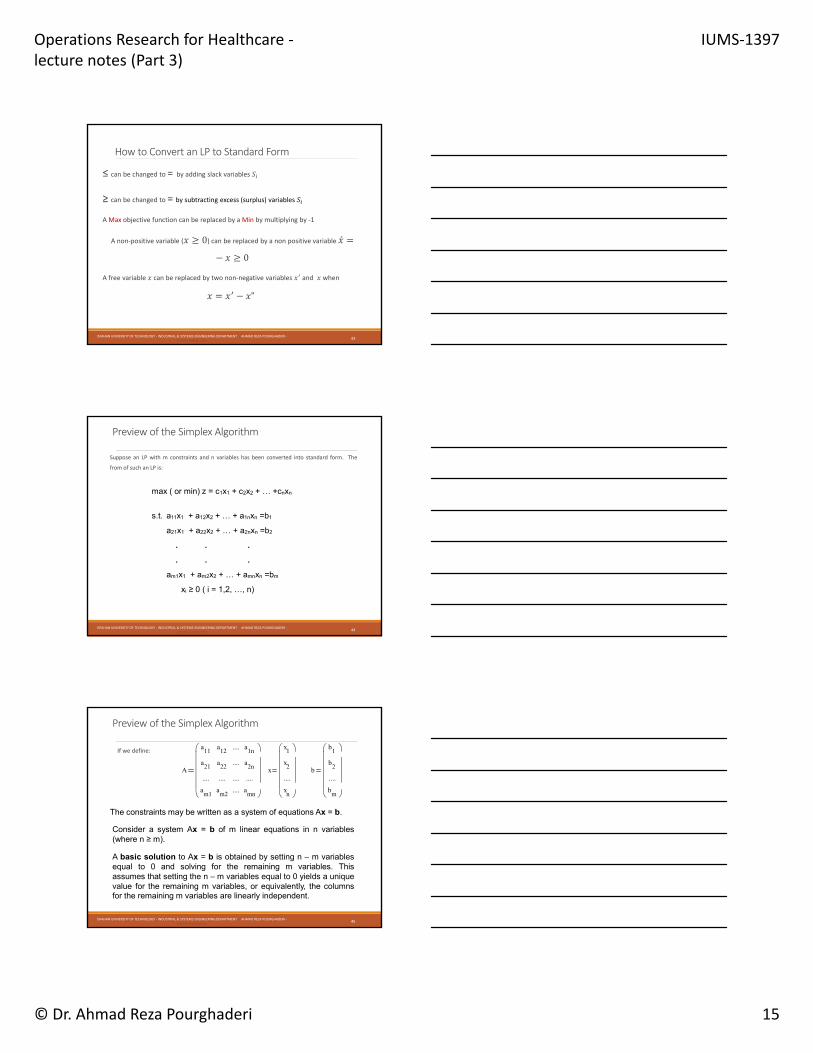
≤ can be changed to = by adding slack variables 𝑆
≥ can be changed to = by subtracting excess (surplus) variables 𝑆
A Max objective function can be replaced by a Min by multiplying by ‐1
A non‐positive variable (𝑥 0) can be replaced by a non positive variable �́�
𝑥 0
A free variable 𝑥 can be replaced by two non‐negative variables 𝑥 and 𝑥 when
𝑥 𝑥 𝑥"
How to Convert an LP to Standard Form
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
43
Suppose an LP with m constraints and n variables has been converted into standard form. The
from of such an LP is:
max ( or min) z = c1x1 + c2x2 + … +cnxn
s.t. a11x1 + a12x2 + … + a1nxn =b1
a21x1 + a22x2 + … + a2nxn =b2
. . .
. . .
am1x1 + am2x2 + … + amnxn =bm
xi ≥ 0 ( i = 1,2, …, n)
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
44
Preview of the Simplex Algorithm
If we define:
The constraints may be written as a system of equations Ax = b.
A
a11
a21
....
am1
a12
a22
....
am2
....
....
....
....
a1n
a2n
....
amn
x
x1
x2
....
xn
b
b1
b2
....
bm
Consider a system Ax = b of m linear equations in n variables(where n ≥ m).
A basic solution to Ax = b is obtained by setting n – m variablesequal to 0 and solving for the remaining m variables. Thisassumes that setting the n – m variables equal to 0 yields a uniquevalue for the remaining m variables, or equivalently, the columnsfor the remaining m variables are linearly independent.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
45
Preview of the Simplex Algorithm
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 16
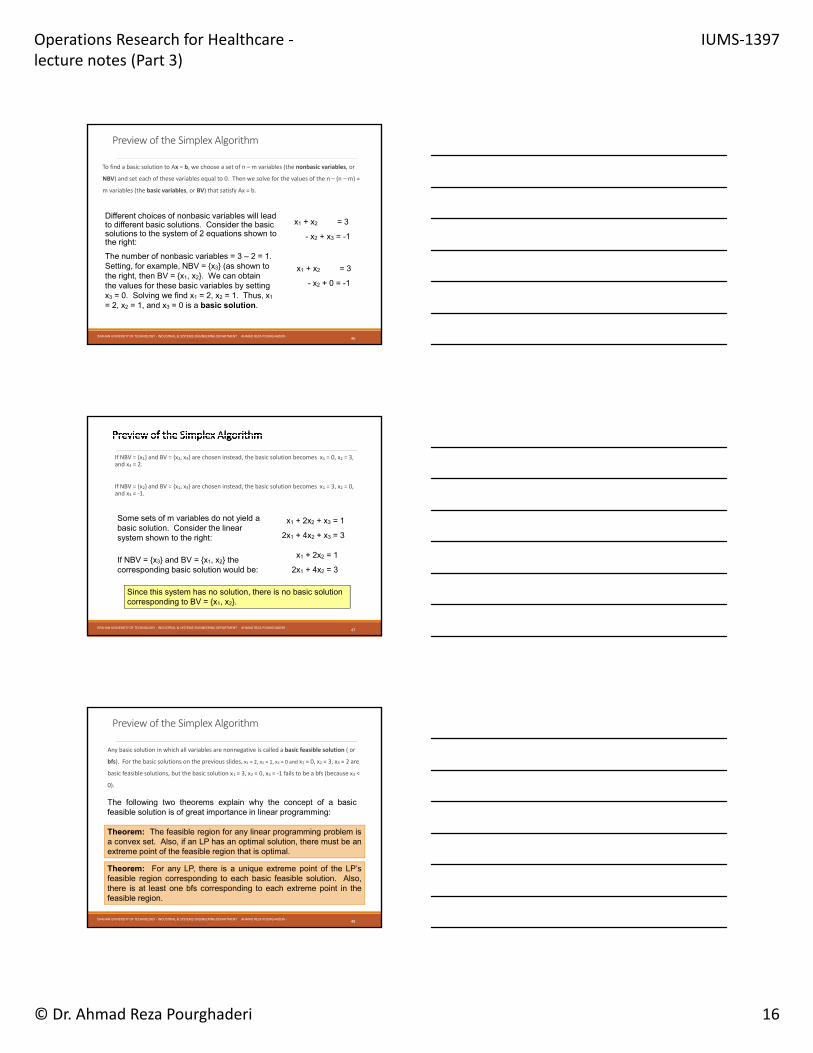
To find a basic solution to Ax = b, we choose a set of n – m variables (the nonbasic variables, or
NBV) and set each of these variables equal to 0. Then we solve for the values of the n – (n – m) =
m variables (the basic variables, or BV) that satisfy Ax = b.
x1 + x2 = 3
- x2 + x3 = -1
Different choices of nonbasic variables will lead to different basic solutions. Consider the basic solutions to the system of 2 equations shown to the right:
The number of nonbasic variables = 3 – 2 = 1. Setting, for example, NBV = {x3} (as shown to the right, then BV = {x1, x2}. We can obtain the values for these basic variables by setting x3 = 0. Solving we find x1 = 2, x2 = 1. Thus, x1
= 2, x2 = 1, and x3 = 0 is a basic solution.
x1 + x2 = 3
- x2 + 0 = -1
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
46
Preview of the Simplex Algorithm
If NBV = {x1} and BV = {x2, x3} are chosen instead, the basic solution becomes x1 = 0, x2 = 3, and x3 = 2.
If NBV = {x2} and BV = {x1, x3} are chosen instead, the basic solution becomes x1 = 3, x2 = 0, and x3 = ‐1.
Some sets of m variables do not yield a basic solution. Consider the linear system shown to the right:
If NBV = {x3} and BV = {x1, x2} the corresponding basic solution would be:
x1 + 2x2 + x3 = 1
2x1 + 4x2 + x3 = 3
x1 + 2x2 = 1
2x1 + 4x2 = 3
Since this system has no solution, there is no basic solution corresponding to BV = {x1, x2}.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
47
Preview of the Simplex Algorithm
Any basic solution in which all variables are nonnegative is called a basic feasible solution ( or
bfs). For the basic solutions on the previous slides, x1 = 2, x2 = 1, x3 = 0 and x1 = 0, x2 = 3, x3 = 2 are
basic feasible solutions, but the basic solution x1 = 3, x2 = 0, x3 = ‐1 fails to be a bfs (because x3 <
0).
The following two theorems explain why the concept of a basicfeasible solution is of great importance in linear programming:
Theorem: The feasible region for any linear programming problem isa convex set. Also, if an LP has an optimal solution, there must be anextreme point of the feasible region that is optimal.
Theorem: For any LP, there is a unique extreme point of the LP’sfeasible region corresponding to each basic feasible solution. Also,there is at least one bfs corresponding to each extreme point in thefeasible region.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
48
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 17
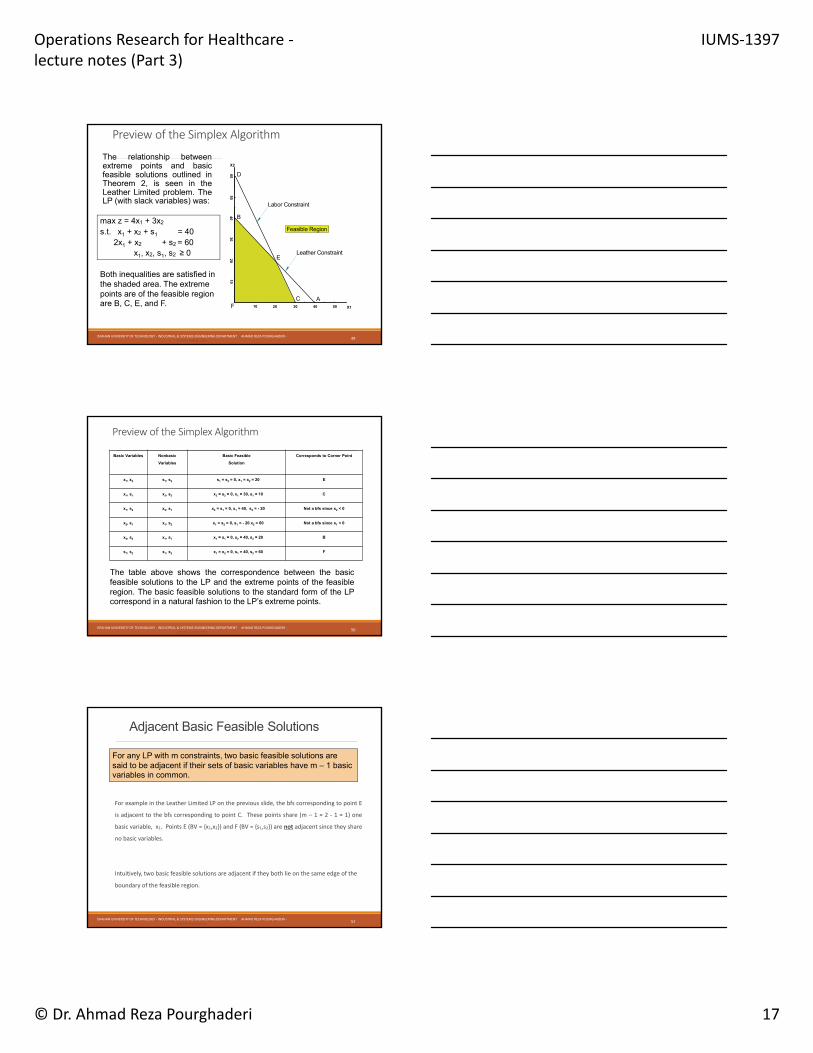
max z = 4x1 + 3x2
s.t. x1 + x2 + s1 = 402x1 + x2 + s2 = 60
x1, x2, s1, s2 ≥ 0
X1
X2
10 20 30 40
1020
3040
50
Feasible Region
50
60
E
ACF
B
D
Leather Constraint
Labor Constraint
Both inequalities are satisfied in the shaded area. The extreme points are of the feasible region are B, C, E, and F.
The relationship betweenextreme points and basicfeasible solutions outlined inTheorem 2, is seen in theLeather Limited problem. TheLP (with slack variables) was:
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
49
Preview of the Simplex Algorithm
Basic Variables Nonbasic
Variables
Basic Feasible
Solution
Corresponds to Corner Point
x1, x2 s1, s2 s1 = s2 = 0, x1 = x2 = 20 E
x1, s1 x2, s2 x2 = s2 = 0, x1 = 30, s1 = 10 C
x1, s2 x2, s1 x2 = s1 = 0, x1 = 40, s2 = - 20 Not a bfs since s2 < 0
x2, s1 x1, s2 x1 = s2 = 0, s1 = - 20 x2 = 60 Not a bfs since s1 < 0
x2, s2 x1, s1 x1 = s1 = 0, x2 = 40, s2 = 20 B
s1, s2 x1, x2 x1 = x2 = 0, s1 = 40, s2 = 60 F
The table above shows the correspondence between the basicfeasible solutions to the LP and the extreme points of the feasibleregion. The basic feasible solutions to the standard form of the LPcorrespond in a natural fashion to the LP’s extreme points.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
50
Preview of the Simplex Algorithm
Adjacent Basic Feasible Solutions
For example in the Leather Limited LP on the previous slide, the bfs corresponding to point E
is adjacent to the bfs corresponding to point C. These points share (m – 1 = 2 ‐ 1 = 1) one
basic variable, x1. Points E (BV = {x1,x2}) and F (BV = {s1,s2}) are not adjacent since they share
no basic variables.
Intuitively, two basic feasible solutions are adjacent if they both lie on the same edge of the
boundary of the feasible region.
For any LP with m constraints, two basic feasible solutions are said to be adjacent if their sets of basic variables have m – 1 basic variables in common.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
51
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 18
The simplex method is not used to examine all the feasible solutions.
It deals only with a small and unique set of feasible solutions, the set of extreme
points (i.e., extreme points) of the convex feasible space that contains the optimal
solution.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
52
Preview of the Simplex Algorithm
For any LP, if an extreme point (bfs) has the best objective functionvalue among all its adjacent extreme points (i.e. there is no edgecontaining the point so that the objective function is strictly increasingon the edge moving away from the point), that extreme pointcorresponds to an optimal solution.
The Simplex Algorithm Steps involved:
General description of the simplex algorithm solving an LP in a maximization problem:
1. Locate an extreme point of the feasible region.
2. Examine each boundary edge intersecting at this point to see whether movement
along any edge increases the value of the objective function.
3. If the value of the objective function increases along any edge, move along this
edge to the adjacent extreme point. If several edges indicate improvement, the
edge providing the greatest rate of increase is selected.
4. Repeat steps 2 and 3 until movement along any edge no longer increases the value
of the objective function.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
53
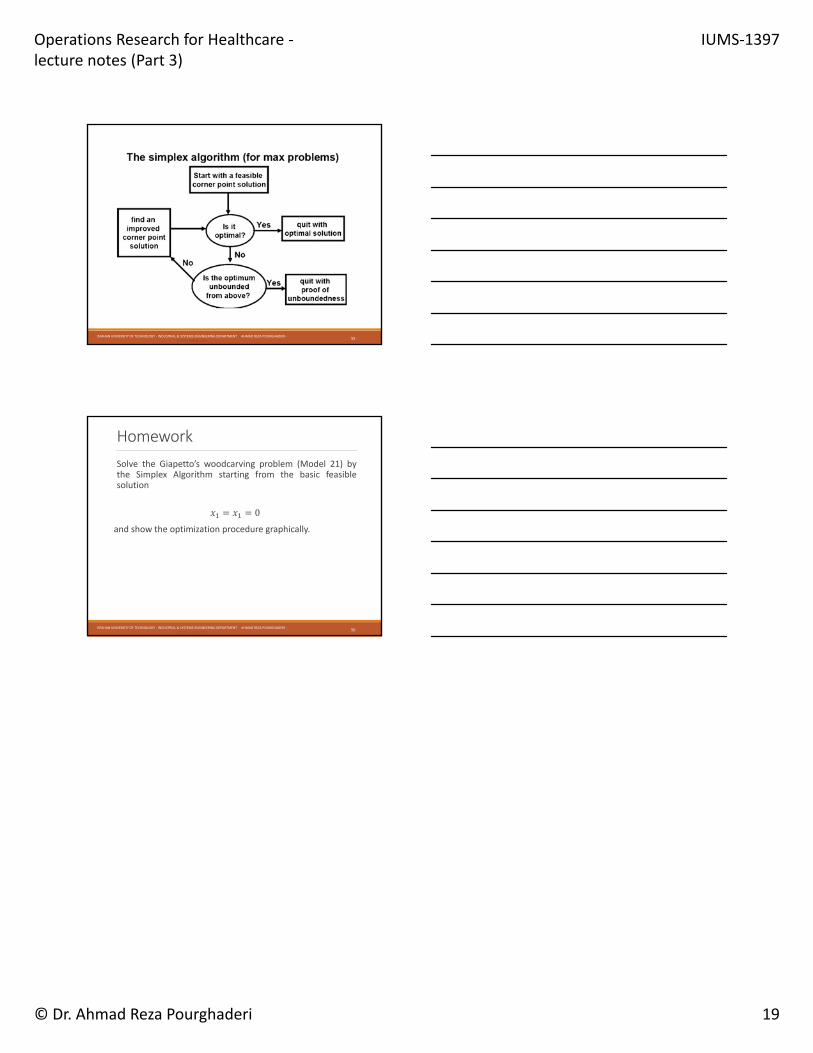
1. Find a bfs to the LP. We will call this bfs the initial bfs. In general, the most recent
bfs will be called the current bfs, so at the beginning of the problem, the initial bfs is
the current bfs.
2. Determine if the current bfs is an optimal solution to the LP. If it is not, find an
adjacent bfs that has a larger z‐value.
3. Return to Step 2, using the new bfs as the current bfs.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
54
In the other words,
the Simplex Algorithm Steps involved:
Operations Research for Healthcare ‐lecture notes (Part 3)
IUMS‐1397
© Dr. Ahmad Reza Pourghaderi 19
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
55
Homework
Solve the Giapetto’s woodcarving problem (Model 21) bythe Simplex Algorithm starting from the basic feasiblesolution
𝑥 𝑥 0
and show the optimization procedure graphically.
ISFAHAN UNIVERSITY OF TECHNOLOGY ‐ INDUSTRIAL & SYSTEMS ENGINEERING DEPARTMENT AHMAD REZA POURGHADERI ‐POURGHADERI.COM
56
Related Documents











