1382 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 55, NO. 6, JUNE 2007 On the Robustness of Digital Predistortion Function Synthesis and Average Power Tracking for Highly Nonlinear Power Amplifiers Oualid Hammi, Student Member, IEEE, Slim Boumaiza, Member, IEEE, and Fadhel M. Ghannouchi, Fellow, IEEE Abstract—In this paper, a comprehensive study of the robustness of the digital predistortion function synthesis is presented. This study covers two aspects: the processing of the power amplifier (PA) input and output measured data intended for the extraction of the corresponding predistortion function, and the optimal set- ting of the predistorter’s small-signal gain to adaptively track the average power variation between the input and output of the pre- distorter. First, the accuracy of the polynomial curve fitting and the lookup table’s scheme in mimicking the measured AM/AM and AM/PM characteristics of the PA is investigated. To address the high dispersion of coefficients of the polynomial function, which limits the order that can be implemented and the fitting capabili- ties, a pre-processing technique is proposed. Second, the fitted PA curves are used to investigate the effects of the small-signal gain of the predistortion function on the linearization performance. An au- tomated average power tracking technique is introduced in order to maintain a unit average gain of the predistorter. The measured spectra at the output of the amplifier show an additional 12-dBc improvement in the output spectrum regrowth. Index Terms—Digital predistorter (DPD), lookup table (LUT), nonlinearity, polynomial model, power amplifier (PA). I. INTRODUCTION I N MODERN wireless communication systems, advanced modulations and access techniques are employed to increase the spectrum efficiency of the overcrowded and limited RF spec- trum. These access techniques, which include wideband code division multiple access (WCDMA) and orthogonal frequency division multiplexing (OFDM), result in envelope varying sig- nals that set stringent requirements on the linearity performance of the transmitter and, especially, the power amplifier (PA). In order to meet these linearity requirements, linearization tech- niques are needed to lower the backoff level at the output of the PA and thus improve the achievable power efficiency [1]–[6]. Predistortion is among the more intuitive linearization tech- niques, and its implementation can be either analog [1]–[4] or digital [5], [6], [9]–[12]. However, digital implementation is being widely preferred due to the accuracy that can be achieved Manuscript received October 16, 2006; revised January 24, 2007. This work was supported by the Informatics Circle of Research Excellence, by the Nat- ural Sciences and Engineering Research Council of Canada, and by Canada Re- search Chairs. The authors are with the iRadio Laboratory, Department of Electrical and Computer Engineering, Schulich School of Engineering, University of Calgary, Calgary, AB, Canada T2N 1N4 (e-mail:[email protected]; [email protected]; [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TMTT.2007.895237 in synthesizing the predistortion function when digital signal processors are used. Digital predistortion is, therefore, a cost-ef- fective approach in the linearization of RF PAs, particularly for base-station applications. This technique consists of adding a complementary nonlinear function upstream of the PA so that the cascade of both nonlinear functions behaves as a linear system. In addition to its inherent conceptual simplicity, digital predistortion offers a moderate im- plementation complexity, while achieving good performance by taking advantage of the accuracy of digital signal processing. Fur- thermore, the digital implementation of the predistortion function gives it the ability to synthesize highly nonlinear shapes. Accord- ingly, it becomes possible to use highly nonlinear PAs, such as Doherty amplifiers and amplifiers biased in deep class AB. In- deed, these PAs have increased power efficiency compared to that of the widely deployed mildly nonlinear class AB PAs. The use of digital predistorters (DPDs) along with highly nonlinear PAs raises new challenges that limit system perfor- mance. First, for memoryless predistorters, two approaches can be used to process the PAs measured AM/AM and AM/PM characteristics and extract the fitted curves: polynomial func- tions and lookup tables (LUTs) [6]–[9]. This is a critical step in the design of DPDs since the predistortion function will be the complementary nonlinear function of the fitted AM/AM and AM/PM curves of the PA. The polynomial functions showed good performance when used with weakly nonlinear PAs [9]. However, a comparative study between the robustness of the polynomial functions and the LUTs, when applied to linearize highly nonlinear PAs, re- vealed that the polynomial functions have limited fitting and nu- merical accuracies [10]. Second, the predistorter’s gain at the operating average power is a major consideration that needs to be taken into account when DPDs are used with highly nonlinear PAs. This issue is not critical in designing DPDs for weakly non- linear PAs since the corresponding predistorter’s average output power is fairly close to its average input power. Conversely, highly nonlinear PAs exhibit significant gain variation at low input power levels, which translate into a steeper gain variation of the corresponding DPD. Consequently, the DPD’s average output power differs from its average input power that was used in the PA characterization step. Accordingly, the PA will operate at an average input power level that is different from the one used in the characterization process. This leads to a mismatch between the PA’s nonlinear characteristics and the predistorter’s nonlinearities and, ultimately, to a degradation in the achievable performance. 0018-9480/$25.00 © 2007 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1382 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 55, NO. 6, JUNE 2007
On the Robustness of Digital Predistortion FunctionSynthesis and Average Power Tracking for
Highly Nonlinear Power AmplifiersOualid Hammi, Student Member, IEEE, Slim Boumaiza, Member, IEEE, and Fadhel M. Ghannouchi, Fellow, IEEE
Abstract—In this paper, a comprehensive study of the robustnessof the digital predistortion function synthesis is presented. Thisstudy covers two aspects: the processing of the power amplifier(PA) input and output measured data intended for the extractionof the corresponding predistortion function, and the optimal set-ting of the predistorter’s small-signal gain to adaptively track theaverage power variation between the input and output of the pre-distorter. First, the accuracy of the polynomial curve fitting andthe lookup table’s scheme in mimicking the measured AM/AM andAM/PM characteristics of the PA is investigated. To address thehigh dispersion of coefficients of the polynomial function, whichlimits the order that can be implemented and the fitting capabili-ties, a pre-processing technique is proposed. Second, the fitted PAcurves are used to investigate the effects of the small-signal gain ofthe predistortion function on the linearization performance. An au-tomated average power tracking technique is introduced in orderto maintain a unit average gain of the predistorter. The measuredspectra at the output of the amplifier show an additional 12-dBcimprovement in the output spectrum regrowth.
Index Terms—Digital predistorter (DPD), lookup table (LUT),nonlinearity, polynomial model, power amplifier (PA).
I. INTRODUCTION
I N MODERN wireless communication systems, advancedmodulations and access techniques are employed to increase
the spectrum efficiency of the overcrowded and limited RF spec-trum. These access techniques, which include wideband codedivision multiple access (WCDMA) and orthogonal frequencydivision multiplexing (OFDM), result in envelope varying sig-nals that set stringent requirements on the linearity performanceof the transmitter and, especially, the power amplifier (PA). Inorder to meet these linearity requirements, linearization tech-niques are needed to lower the backoff level at the output of thePA and thus improve the achievable power efficiency [1]–[6].
Predistortion is among the more intuitive linearization tech-niques, and its implementation can be either analog [1]–[4] ordigital [5], [6], [9]–[12]. However, digital implementation isbeing widely preferred due to the accuracy that can be achieved
Manuscript received October 16, 2006; revised January 24, 2007. This workwas supported by the Informatics Circle of Research Excellence, by the Nat-ural Sciences and Engineering Research Council of Canada, and by Canada Re-search Chairs.
The authors are with the iRadio Laboratory, Department of Electricaland Computer Engineering, Schulich School of Engineering, Universityof Calgary, Calgary, AB, Canada T2N 1N4 (e-mail:[email protected];[email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMTT.2007.895237
in synthesizing the predistortion function when digital signalprocessors are used. Digital predistortion is, therefore, a cost-ef-fective approach in the linearization of RF PAs, particularly forbase-station applications.
This technique consists of adding a complementary nonlinearfunction upstream of the PA so that the cascade of both nonlinearfunctions behaves as a linear system. In addition to its inherentconceptual simplicity, digital predistortion offers a moderate im-plementation complexity, while achieving good performance bytakingadvantageof theaccuracyofdigital signalprocessing.Fur-thermore, thedigital implementationof thepredistortionfunctiongives it the ability to synthesize highly nonlinear shapes. Accord-ingly, it becomes possible to use highly nonlinear PAs, such asDoherty amplifiers and amplifiers biased in deep class AB. In-deed, these PAs have increased power efficiency compared tothat of the widely deployed mildly nonlinear class AB PAs.
The use of digital predistorters (DPDs) along with highlynonlinear PAs raises new challenges that limit system perfor-mance. First, for memoryless predistorters, two approaches canbe used to process the PAs measured AM/AM and AM/PMcharacteristics and extract the fitted curves: polynomial func-tions and lookup tables (LUTs) [6]–[9]. This is a critical stepin the design of DPDs since the predistortion function will bethe complementary nonlinear function of the fitted AM/AM andAM/PM curves of the PA.
The polynomial functions showed good performance whenused with weakly nonlinear PAs [9]. However, a comparativestudy between the robustness of the polynomial functions andthe LUTs, when applied to linearize highly nonlinear PAs, re-vealed that the polynomial functions have limited fitting and nu-merical accuracies [10]. Second, the predistorter’s gain at theoperating average power is a major consideration that needs tobe taken into account when DPDs are used with highly nonlinearPAs. This issue is not critical in designing DPDs for weakly non-linear PAs since the corresponding predistorter’s average outputpower is fairly close to its average input power. Conversely,highly nonlinear PAs exhibit significant gain variation at lowinput power levels, which translate into a steeper gain variationof the corresponding DPD. Consequently, the DPD’s averageoutput power differs from its average input power that was usedin the PA characterization step. Accordingly, the PA will operateat an average input power level that is different from the oneused in the characterization process. This leads to a mismatchbetween the PA’s nonlinear characteristics and the predistorter’snonlinearities and, ultimately, to a degradation in the achievableperformance.
0018-9480/$25.00 © 2007 IEEE
HAMMI et al.: ROBUSTNESS OF DIGITAL PREDISTORTION FUNCTION SYNTHESIS AND AVERAGE POWER TRACKING FOR HIGHLY NONLINEAR PAs 1383
Predistorters, based on multi-LUTs, which take into accountthe variation of the PA’s average input power, were proposedin [6], but, this approach does not compensate for the averageinput power variation due to the predistortion function shape.Thus, for highly nonlinear PAs, it is necessary to adjust the pre-distorter architecture to automatically monitor the predistortionfunction and ensure a unit gain at the operating average powerlevel. This will guarantee a perfect match between the predistor-tion function and the PA nonlinearity and, thus, achieve betterlinearity performance.
In this paper, the robustness of the digital predistortion func-tion synthesis process applied to linearize highly nonlinear RFPAs is investigated. The extraction of the PA’s nonlinear charac-teristics from the measured data and the predistorter’s ability totrack the transmitted average power are considered. Section IIpresents the comparative study of the robustness of the polyno-mial and LUT approaches. In Section III, a data pre-processingtechnique is introduced, and its outcome on the polynomial ap-proach robustness is evaluated. The augmented predistorter ar-chitecture, which includes an automated average power control,is presented in Section IV, and its effectiveness is assessed ex-perimentally. The conclusions are presented in Section V.
II. COMPARATIVE STUDY OF THE ROBUSTNESS OF
THE POLYNOMIAL AND LUT TECHNIQUES
The quality of the linearity improvement achieved by DPDsdepends on the accurate extraction of the PA’s nonlinear char-acteristics. Two approaches have been proposed in the literatureto extract the PA’s memoryless nonlinearities from the raw mea-sured AM/AM and AM/PM data. In the first method, the mea-sured data is fitted using two polynomial functions, whereas inthe second technique, the measured data is smoothed using anaveraging technique, and the resulting curves are stored into twoLUTs.
To study the robustness of these two approaches when ap-plied to highly nonlinear PAs, two PAs biased in deep classAB close to the pinch off were used. Both amplifiers were builtusing LDMOS transistors. The first PA (PA1) was a 100-W peakpower amplifier that operated around 2140 MHz. The secondamplifier (PA2) was a 10-W peak power amplifier that operatedaround 1950 MHz.
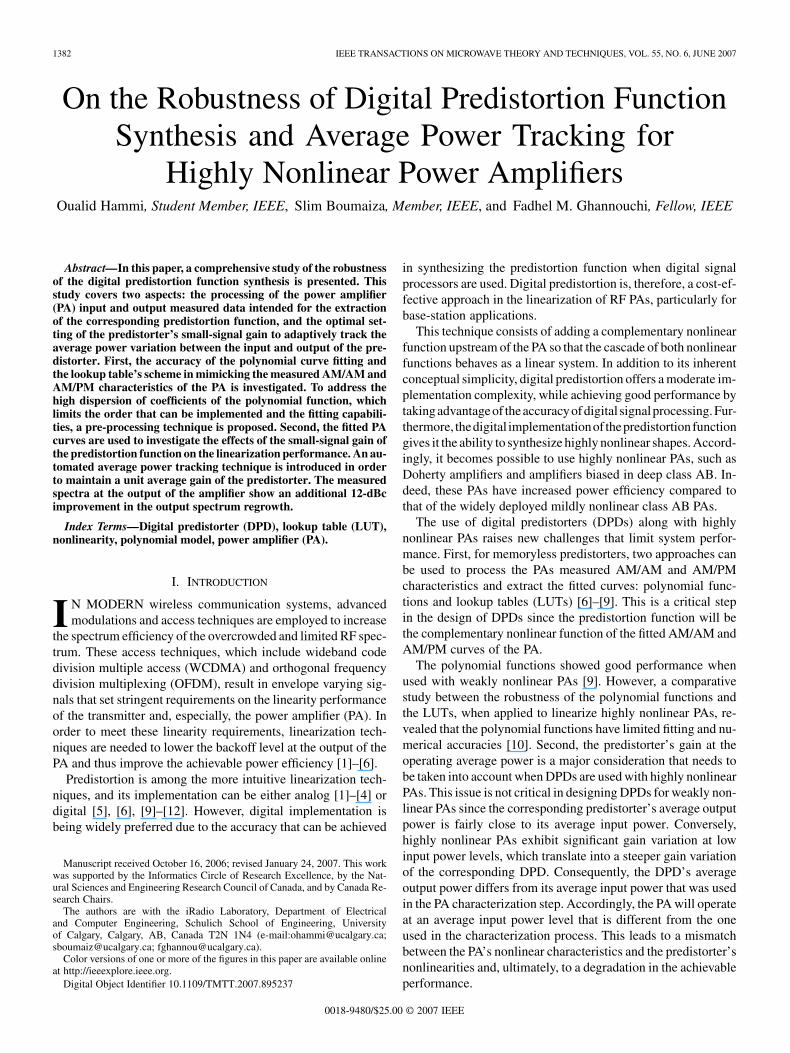
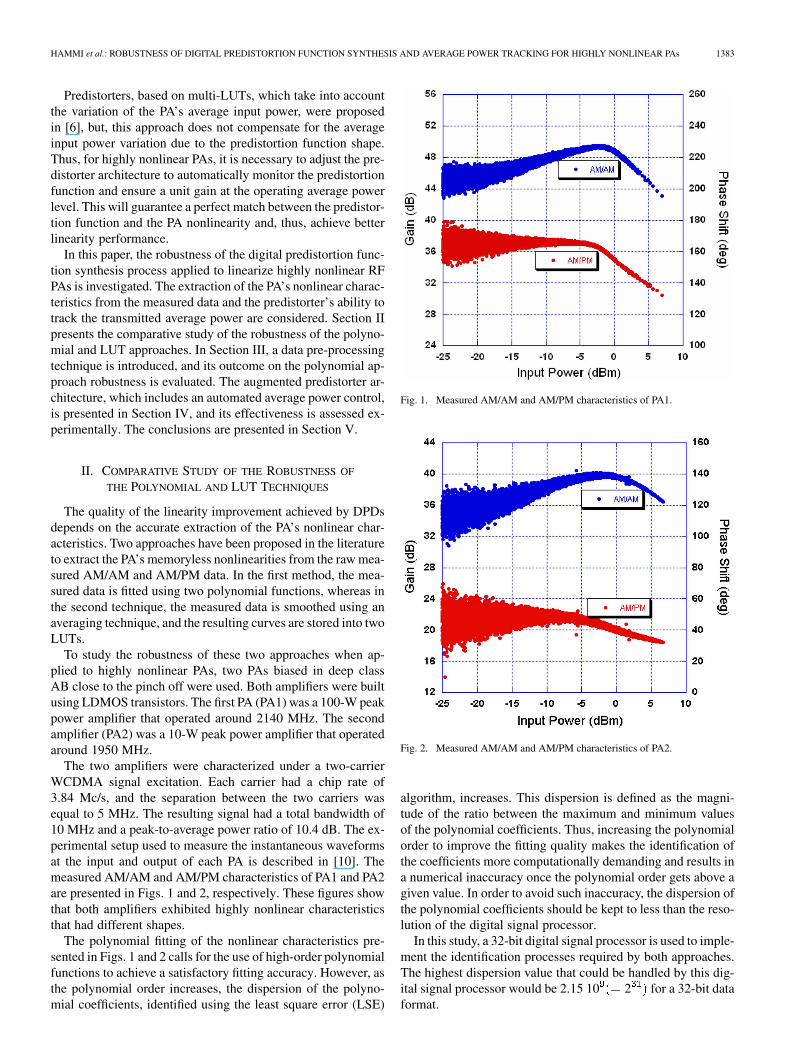
The two amplifiers were characterized under a two-carrierWCDMA signal excitation. Each carrier had a chip rate of3.84 Mc/s, and the separation between the two carriers wasequal to 5 MHz. The resulting signal had a total bandwidth of10 MHz and a peak-to-average power ratio of 10.4 dB. The ex-perimental setup used to measure the instantaneous waveformsat the input and output of each PA is described in [10]. Themeasured AM/AM and AM/PM characteristics of PA1 and PA2are presented in Figs. 1 and 2, respectively. These figures showthat both amplifiers exhibited highly nonlinear characteristicsthat had different shapes.
The polynomial fitting of the nonlinear characteristics pre-sented in Figs. 1 and 2 calls for the use of high-order polynomialfunctions to achieve a satisfactory fitting accuracy. However, asthe polynomial order increases, the dispersion of the polyno-mial coefficients, identified using the least square error (LSE)
Fig. 1. Measured AM/AM and AM/PM characteristics of PA1.
Fig. 2. Measured AM/AM and AM/PM characteristics of PA2.
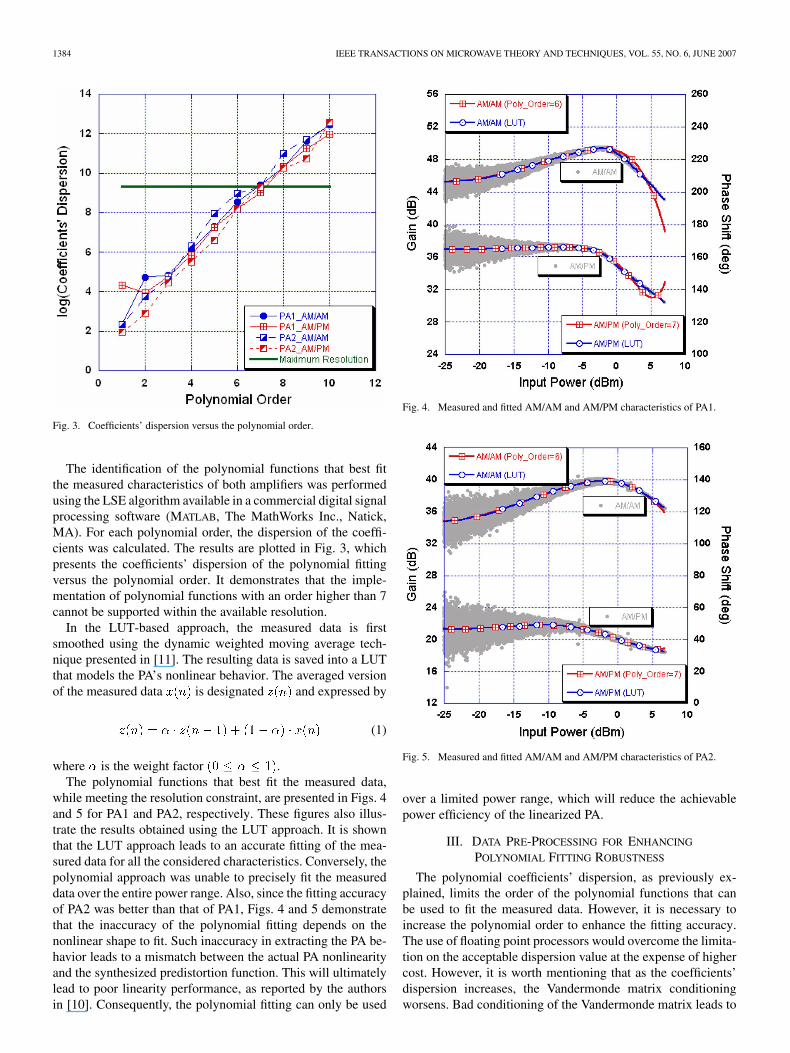
algorithm, increases. This dispersion is defined as the magni-tude of the ratio between the maximum and minimum valuesof the polynomial coefficients. Thus, increasing the polynomialorder to improve the fitting quality makes the identification ofthe coefficients more computationally demanding and results ina numerical inaccuracy once the polynomial order gets above agiven value. In order to avoid such inaccuracy, the dispersion ofthe polynomial coefficients should be kept to less than the reso-lution of the digital signal processor.
In this study, a 32-bit digital signal processor is used to imple-ment the identification processes required by both approaches.The highest dispersion value that could be handled by this dig-ital signal processor would be 2.15 10 2 for a 32-bit dataformat.
1384 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 55, NO. 6, JUNE 2007
Fig. 3. Coefficients’ dispersion versus the polynomial order.
The identification of the polynomial functions that best fitthe measured characteristics of both amplifiers was performedusing the LSE algorithm available in a commercial digital signalprocessing software (MATLAB, The MathWorks Inc., Natick,MA). For each polynomial order, the dispersion of the coeffi-cients was calculated. The results are plotted in Fig. 3, whichpresents the coefficients’ dispersion of the polynomial fittingversus the polynomial order. It demonstrates that the imple-mentation of polynomial functions with an order higher than 7cannot be supported within the available resolution.
In the LUT-based approach, the measured data is firstsmoothed using the dynamic weighted moving average tech-nique presented in [11]. The resulting data is saved into a LUTthat models the PA’s nonlinear behavior. The averaged versionof the measured data is designated and expressed by
(1)
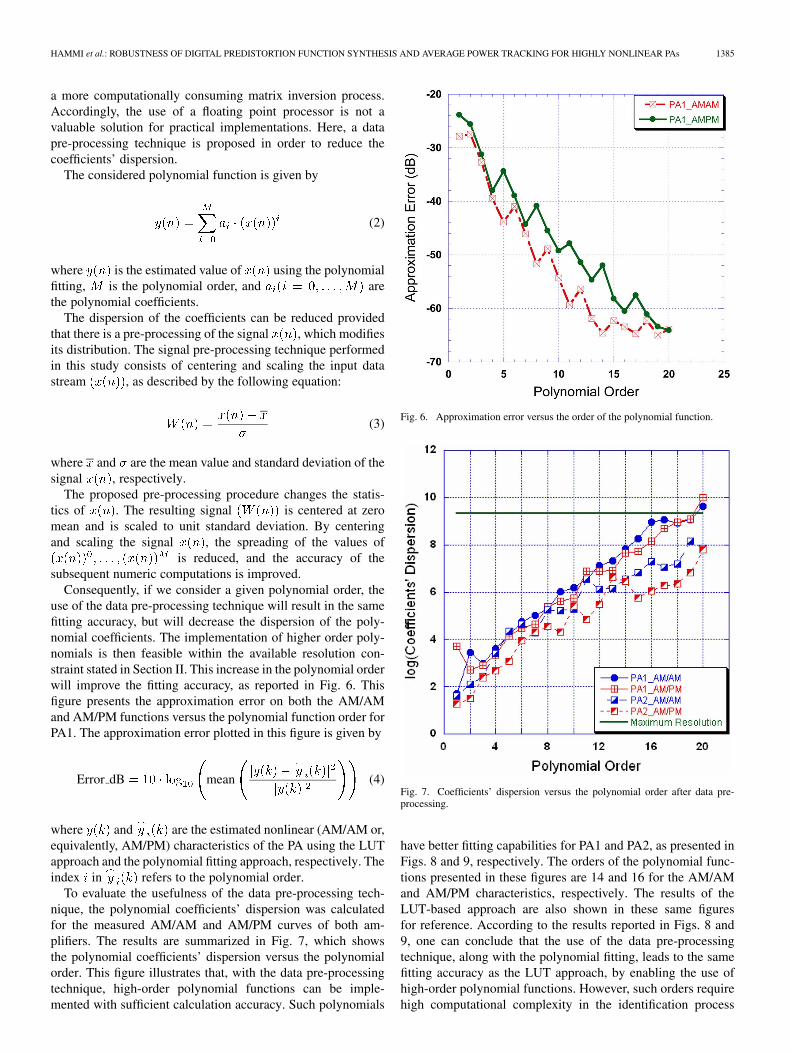
where is the weight factor .The polynomial functions that best fit the measured data,
while meeting the resolution constraint, are presented in Figs. 4and 5 for PA1 and PA2, respectively. These figures also illus-trate the results obtained using the LUT approach. It is shownthat the LUT approach leads to an accurate fitting of the mea-sured data for all the considered characteristics. Conversely, thepolynomial approach was unable to precisely fit the measureddata over the entire power range. Also, since the fitting accuracyof PA2 was better than that of PA1, Figs. 4 and 5 demonstratethat the inaccuracy of the polynomial fitting depends on thenonlinear shape to fit. Such inaccuracy in extracting the PA be-havior leads to a mismatch between the actual PA nonlinearityand the synthesized predistortion function. This will ultimatelylead to poor linearity performance, as reported by the authorsin [10]. Consequently, the polynomial fitting can only be used
Fig. 4. Measured and fitted AM/AM and AM/PM characteristics of PA1.
Fig. 5. Measured and fitted AM/AM and AM/PM characteristics of PA2.
over a limited power range, which will reduce the achievablepower efficiency of the linearized PA.
III. DATA PRE-PROCESSING FOR ENHANCING
POLYNOMIAL FITTING ROBUSTNESS
The polynomial coefficients’ dispersion, as previously ex-plained, limits the order of the polynomial functions that canbe used to fit the measured data. However, it is necessary toincrease the polynomial order to enhance the fitting accuracy.The use of floating point processors would overcome the limita-tion on the acceptable dispersion value at the expense of highercost. However, it is worth mentioning that as the coefficients’dispersion increases, the Vandermonde matrix conditioningworsens. Bad conditioning of the Vandermonde matrix leads to
HAMMI et al.: ROBUSTNESS OF DIGITAL PREDISTORTION FUNCTION SYNTHESIS AND AVERAGE POWER TRACKING FOR HIGHLY NONLINEAR PAs 1385
a more computationally consuming matrix inversion process.Accordingly, the use of a floating point processor is not avaluable solution for practical implementations. Here, a datapre-processing technique is proposed in order to reduce thecoefficients’ dispersion.
The considered polynomial function is given by
(2)
where is the estimated value of using the polynomialfitting, is the polynomial order, and arethe polynomial coefficients.
The dispersion of the coefficients can be reduced providedthat there is a pre-processing of the signal , which modifiesits distribution. The signal pre-processing technique performedin this study consists of centering and scaling the input datastream , as described by the following equation:
(3)
where and are the mean value and standard deviation of thesignal , respectively.
The proposed pre-processing procedure changes the statis-tics of . The resulting signal is centered at zeromean and is scaled to unit standard deviation. By centeringand scaling the signal , the spreading of the values of
is reduced, and the accuracy of thesubsequent numeric computations is improved.
Consequently, if we consider a given polynomial order, theuse of the data pre-processing technique will result in the samefitting accuracy, but will decrease the dispersion of the poly-nomial coefficients. The implementation of higher order poly-nomials is then feasible within the available resolution con-straint stated in Section II. This increase in the polynomial orderwill improve the fitting accuracy, as reported in Fig. 6. Thisfigure presents the approximation error on both the AM/AMand AM/PM functions versus the polynomial function order forPA1. The approximation error plotted in this figure is given by
Error dB mean (4)
where and are the estimated nonlinear (AM/AM or,equivalently, AM/PM) characteristics of the PA using the LUTapproach and the polynomial fitting approach, respectively. Theindex in refers to the polynomial order.
To evaluate the usefulness of the data pre-processing tech-nique, the polynomial coefficients’ dispersion was calculatedfor the measured AM/AM and AM/PM curves of both am-plifiers. The results are summarized in Fig. 7, which showsthe polynomial coefficients’ dispersion versus the polynomialorder. This figure illustrates that, with the data pre-processingtechnique, high-order polynomial functions can be imple-mented with sufficient calculation accuracy. Such polynomials
Fig. 6. Approximation error versus the order of the polynomial function.
Fig. 7. Coefficients’ dispersion versus the polynomial order after data pre-processing.
have better fitting capabilities for PA1 and PA2, as presented inFigs. 8 and 9, respectively. The orders of the polynomial func-tions presented in these figures are 14 and 16 for the AM/AMand AM/PM characteristics, respectively. The results of theLUT-based approach are also shown in these same figuresfor reference. According to the results reported in Figs. 8 and9, one can conclude that the use of the data pre-processingtechnique, along with the polynomial fitting, leads to the samefitting accuracy as the LUT approach, by enabling the use ofhigh-order polynomial functions. However, such orders requirehigh computational complexity in the identification process
1386 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 55, NO. 6, JUNE 2007
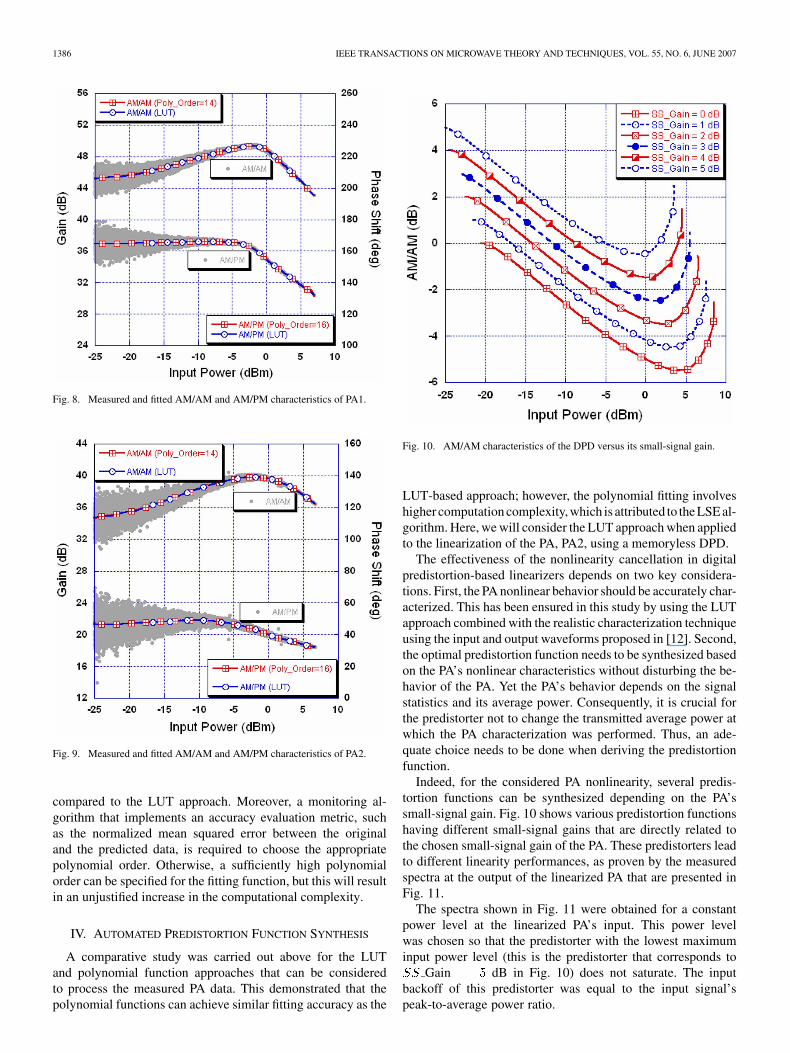
Fig. 8. Measured and fitted AM/AM and AM/PM characteristics of PA1.
Fig. 9. Measured and fitted AM/AM and AM/PM characteristics of PA2.
compared to the LUT approach. Moreover, a monitoring al-gorithm that implements an accuracy evaluation metric, suchas the normalized mean squared error between the originaland the predicted data, is required to choose the appropriatepolynomial order. Otherwise, a sufficiently high polynomialorder can be specified for the fitting function, but this will resultin an unjustified increase in the computational complexity.
IV. AUTOMATED PREDISTORTION FUNCTION SYNTHESIS
A comparative study was carried out above for the LUTand polynomial function approaches that can be consideredto process the measured PA data. This demonstrated that thepolynomial functions can achieve similar fitting accuracy as the
Fig. 10. AM/AM characteristics of the DPD versus its small-signal gain.
LUT-based approach; however, the polynomial fitting involveshigher computation complexity, which is attributed to the LSE al-gorithm. Here, we will consider the LUT approach when appliedto the linearization of the PA, PA2, using a memoryless DPD.
The effectiveness of the nonlinearity cancellation in digitalpredistortion-based linearizers depends on two key considera-tions. First, the PA nonlinear behavior should be accurately char-acterized. This has been ensured in this study by using the LUTapproach combined with the realistic characterization techniqueusing the input and output waveforms proposed in [12]. Second,the optimal predistortion function needs to be synthesized basedon the PA’s nonlinear characteristics without disturbing the be-havior of the PA. Yet the PA’s behavior depends on the signalstatistics and its average power. Consequently, it is crucial forthe predistorter not to change the transmitted average power atwhich the PA characterization was performed. Thus, an ade-quate choice needs to be done when deriving the predistortionfunction.
Indeed, for the considered PA nonlinearity, several predis-tortion functions can be synthesized depending on the PA’ssmall-signal gain. Fig. 10 shows various predistortion functionshaving different small-signal gains that are directly related tothe chosen small-signal gain of the PA. These predistorters leadto different linearity performances, as proven by the measuredspectra at the output of the linearized PA that are presented inFig. 11.
The spectra shown in Fig. 11 were obtained for a constantpower level at the linearized PA’s input. This power levelwas chosen so that the predistorter with the lowest maximuminput power level (this is the predistorter that corresponds to
Gain dB in Fig. 10) does not saturate. The inputbackoff of this predistorter was equal to the input signal’speak-to-average power ratio.
HAMMI et al.: ROBUSTNESS OF DIGITAL PREDISTORTION FUNCTION SYNTHESIS AND AVERAGE POWER TRACKING FOR HIGHLY NONLINEAR PAs 1387
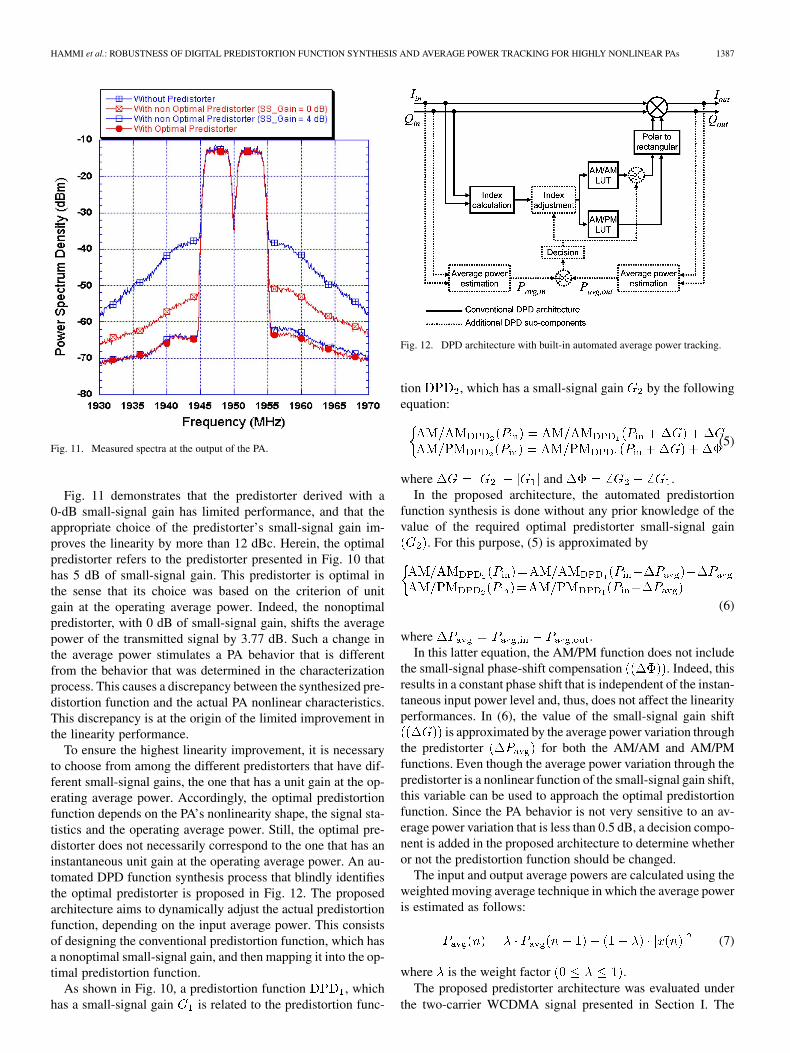
Fig. 11. Measured spectra at the output of the PA.
Fig. 11 demonstrates that the predistorter derived with a0-dB small-signal gain has limited performance, and that theappropriate choice of the predistorter’s small-signal gain im-proves the linearity by more than 12 dBc. Herein, the optimalpredistorter refers to the predistorter presented in Fig. 10 thathas 5 dB of small-signal gain. This predistorter is optimal inthe sense that its choice was based on the criterion of unitgain at the operating average power. Indeed, the nonoptimalpredistorter, with 0 dB of small-signal gain, shifts the averagepower of the transmitted signal by 3.77 dB. Such a change inthe average power stimulates a PA behavior that is differentfrom the behavior that was determined in the characterizationprocess. This causes a discrepancy between the synthesized pre-distortion function and the actual PA nonlinear characteristics.This discrepancy is at the origin of the limited improvement inthe linearity performance.
To ensure the highest linearity improvement, it is necessaryto choose from among the different predistorters that have dif-ferent small-signal gains, the one that has a unit gain at the op-erating average power. Accordingly, the optimal predistortionfunction depends on the PA’s nonlinearity shape, the signal sta-tistics and the operating average power. Still, the optimal pre-distorter does not necessarily correspond to the one that has aninstantaneous unit gain at the operating average power. An au-tomated DPD function synthesis process that blindly identifiesthe optimal predistorter is proposed in Fig. 12. The proposedarchitecture aims to dynamically adjust the actual predistortionfunction, depending on the input average power. This consistsof designing the conventional predistortion function, which hasa nonoptimal small-signal gain, and then mapping it into the op-timal predistortion function.
As shown in Fig. 10, a predistortion function , whichhas a small-signal gain is related to the predistortion func-
Fig. 12. DPD architecture with built-in automated average power tracking.
tion , which has a small-signal gain by the followingequation:
(5)
where and .In the proposed architecture, the automated predistortion
function synthesis is done without any prior knowledge of thevalue of the required optimal predistorter small-signal gain
. For this purpose, (5) is approximated by
(6)
where .In this latter equation, the AM/PM function does not include
the small-signal phase-shift compensation . Indeed, thisresults in a constant phase shift that is independent of the instan-taneous input power level and, thus, does not affect the linearityperformances. In (6), the value of the small-signal gain shift
is approximated by the average power variation throughthe predistorter for both the AM/AM and AM/PMfunctions. Even though the average power variation through thepredistorter is a nonlinear function of the small-signal gain shift,this variable can be used to approach the optimal predistortionfunction. Since the PA behavior is not very sensitive to an av-erage power variation that is less than 0.5 dB, a decision compo-nent is added in the proposed architecture to determine whetheror not the predistortion function should be changed.
The input and output average powers are calculated using theweighted moving average technique in which the average poweris estimated as follows:
(7)
where is the weight factor .The proposed predistorter architecture was evaluated under
the two-carrier WCDMA signal presented in Section I. The

1388 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 55, NO. 6, JUNE 2007
TABLE IAVERAGE POWER VARIATION THROUGH THE PREDISTORTER
average input power was set to 7 dBm. Two predistortionfunctions, which had small-signal gains of 0 and 2 dB, respec-tively, were considered. The proposed predistorter architecturewas used to adjust the predistortion function iteratively, bycontrolling the predistorter’s small-signal gain to minimize theaverage power variation through the predistorter. The resultsare presented in Table I. The th iteration (it. ) reportedin Table I corresponds to the adjustment of the predistortionfunction obtained in the preceding iteration (it. ) by thevalue of , which is also obtained from the precedingiteration (it. ), according to (6).
The linearity performances obtained at the output of the am-plifier for the second case, where the initial small signal of theDPD was set to 2 dB, are presented in Fig. 11. The iteration 1corresponds to the cases where the predistorter’s small-signalgain is set to 4 dB. This corroborates the usefulness of the de-cision block since the adjustment of the predistortion functionwas not required when the average power variation through thepredistorter was less than 0.5 dB. The validity of the approxima-tion in (6) was also assessed. Finally, the measurement resultsdemonstrate the effectiveness of the proposed architecture andits ability to adjust the predistortion function within one or twoiterations.
V. CONCLUSION
In this paper, critical issues related to the linearization ofhighly nonlinear PAs using the digital predistortion techniqueare presented. First, a comparative study between the robust-ness of the polynomial and LUT approaches in processing thePA’s measured data for the predistortion function synthesis wasconducted. This demonstrated the ability of the LUT approachto accurately fit the measured data. Conversely, the polynomialapproach has limited fitting capabilities due to the polynomialcoefficients’ dispersion. This limitation was overcome by in-troducing a signal pre-processing technique that centers andscales the measured data. The fitted PA curves were then usedto synthesize various predistortion functions that have differentsmall-signal gains.
An automated average power tracking solution, which en-sures a unit average gain through the predistorter, was proposedto adaptively select the optimal predistortion function. This keptthe average power of the predistorted signal at the PA input closeenough to that used in the PA characterization process to matchthe predistortion function with the actual behavior of the non-linear PA. The effectiveness of the proposed architecture wasassessed experimentally. The results showed that the linearityperformances were significantly enhanced, and that the systemconverges in less than three iterations.
ACKNOWLEDGMENT
The authors would like to thank C. Simon, University ofCalgary, Calgary, AB, Canada, for providing technical supportduring the measurements. The authors also want to acknowl-edge Agilent Technologies, Palo Alto, CA, for the donation oftheir Advanced Design System (ADS) software.
REFERENCES
[1] F. H. Raab, P. Asbeck, S. Cripps, P. B. Kenington, Z. B. Popovic, N.Pothecary, J. F. Sevic, and N. O. Sokal, “Power amplifiers and transmit-ters for RF and microwave,” IEEE Trans. Microw. Theory Tech., vol.50, no. 3, pp. 814–826, Mar. 2002.
[2] J. Yi, Y. Yang, M. Park, W. Kang, and B. Kim, “Analog predistortionlinearizer for high-power RF amplifiers,” IEEE Trans. Microw. TheoryTech., vol. 48, no. 12, pp. 2709–2713, Dec. 2000.
[3] S. Y. Lee, Y. S. Lee, and Y. H. Jeong, “Fully-automated adaptiveanalog predistortion power amplifier in WCDMA applications,” in 35thIEEE Eur. Microw. Conf., Oct. 2005, vol. 2, 4 pp.
[4] S. Y. Lee, Y. S. Lee, S. H. Hong, H. S. Choi, and Y. H. Jeong, “Inde-pendently controllable 3rd and 5th order analog predistortion linearizerfor RF power amplifier in GSM,” in IEEE Asia–Pacific Adv. Syst. Inte-grated Circuits Conf., Aug. 2004, pp. 146–149.
[5] Y. Nagata, “Linear amplification technique for digital mobile com-munications,” in IEEE Veh. Technol. Conf., May 1989, vol. 1, pp.159–164.
[6] W. J. Jung, W. R. Kim, and K. B. Lee, “Digital predistorter using mul-tiple lookup tables,” Electron. Lett., vol. 39, no. 19, pp. 1386–1388,Sep. 2003.
[7] M. C. Jeruchim, P. Balaban, and K. S. Shanmugan, Simulation of Com-munication Systems: Modeling, Methodology, and Techniques. NewYork: Kluwer, 2000.
[8] E. G. Jeckeln, S. Huei-Yuan, E. Martony, and M. Eron, “Method formodeling amplitude and bandwidth dependent distortion in nonlinearRF devices,” in IEEE MTT-S Int. Microw. Symp. Dig., Jun. 2003, vol.3, pp. 1733–1736.
[9] L. Ding and G. T. Zhou, “Effects of even-order nonlinear terms onpower amplifier modeling and predistortion linearization,” IEEE Trans.Veh. Technol., vol. 53, no. 1, pp. 156–162, Jan. 2004.
[10] O. Hammi, S. Boumaiza, and F. M. Ghannouchi, “On the robustnessof the predistortion function synthesis for highly nonlinear RF poweramplifiers linearization,” in 36th IEEE Eur. Microw. Conf., Sep. 2006,pp. 145–148.
[11] T. Liu, S. Boumaiza, and F. M. Ghannouchi, “Deembedding static non-linearities and accurately identifying and modeling memory effects inwideband RF transmitters,” IEEE Trans. Microw. Theory Tech., vol. 53,no. 11, pp. 3578–3587, Nov. 2005.
[12] S. Boumaiza and F. M. Ghannouchi, “Realistic power-amplifiers char-acterization with application to baseband digital predistortion for 3Gbase stations,” IEEE Trans. Microw. Theory Tech., vol. 50, no. 12, pp.3016–3021, Dec. 2002.
Oualid Hammi (S’03) received the B.Eng. degree inelectrical engineering from the École Nationale d’In-génieurs de Tunis, Tunis, Tunisia, in 2001, the M.Sc.degree from École Polytechnique de Montréal, Mon-tréal, QC, Canada, in 2004, and is currently workingtoward the Ph.D. degree at the University of Calgary,Calgary, AB, Canada.
His current research interests are in the area of mi-crowave and millimeter-wave engineering in general.His particular research activities are related to the de-sign of intelligent and highly efficient linear trans-
mitters for wireless communications and the development of digital signal pro-cessing (DSP) techniques for PA linearization purposes.

HAMMI et al.: ROBUSTNESS OF DIGITAL PREDISTORTION FUNCTION SYNTHESIS AND AVERAGE POWER TRACKING FOR HIGHLY NONLINEAR PAs 1389
Slim Boumaiza (S’00–M’04) received the B.Eng.degree in electrical engineering from the ÉcoleNationale d’Ingénieurs de Tunis, Tunis, Tunisia, in1997, and the M.Sc. and Ph.D. degrees from theÉcole Polytechnique de Montréal, Montréal, QC,Canada, in 1999 and 2004, respectively.
In May 2005, he joined the Electrical and Com-puter Engineering Department, The University ofCalgary, Calgary, AB, Canada, as an AssistantProfessor and faculty member with the iRadioLaboratory. His research interests are in the areas
of design of RF/microwave and millimeter-wave components and systemsfor wireless communications. His current interests include RF/digital signalprocessing (DSP) mixed design of intelligent transmitters, design, character-ization, modeling and linearization of high-power amplifiers, reconfigurableand multiband RF transceivers, and adaptive DSP.
Fadhel M. Ghannouchi (S’84–M’88–SM’93–F’07)received the Ph.D. degree in electrical engineeringfrom the University of Montréal, Montréal, QC,Canada, in 1987.
He is currently an iCORE Professor, a Canada Re-search Chair, and the Director of the iRadio Labo-ratory, Department of Electrical and Computer En-gineering, The University of Calgary, Calgary, AB,Canada. He has held invited positions with severalacademic and research institutions in Europe, NorthAmerica, and Japan. His has authored or coauthored
over 300 publications. He holds seven patents. His research interests are in theareas of microwave instrumentation, modeling of microwave devices and com-munications systems, design and linearization of RF amplifiers, and SDR radiosystems.
Related Documents











