On approximate Birkhoff orthogonality in normed spaces Jacek Chmieli´ nski Instytut Matematyki Uniwersytet Pedagogiczny w Krakowie Banach Spaces and their Applications Lviv (Ukraine), June 26-29, 2019 J. Chmieli´ nski (Krak´ow,Poland) Approximate Birkhoff orthogonality Lviv 2019 1 / 28

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

On approximate Birkhoff orthogonality in normed spaces
Jacek Chmielinski
Instytut MatematykiUniwersytet Pedagogiczny w Krakowie
Banach Spaces and their ApplicationsLviv (Ukraine), June 26-29, 2019
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 1 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Introduction — inner product space
(X , 〈·|·〉) — inner product space; x⊥y ⇔ 〈x |y〉 = 0.
Approximate orthogonality (ε-orthogonality with ε ∈ [0, 1)):
x⊥ε y ⇔ | 〈x |y〉 | ≤ ε ‖x‖ ‖y‖, x , y ∈ X .
Observation
x⊥ε y ⇔ ∃ z ∈ X : x⊥z , ‖z − y‖ ≤ ε‖y‖.
Indeed, if x⊥ε y take z = − 〈x |y〉‖x‖2 x + y (z = y in case x = 0).
Conversely, assuming x⊥z and ‖z − y‖ ≤ ε‖y‖,
| 〈x |y〉 | = | 〈x |y − z〉 | ≤ ‖x‖ ‖y − z‖ ≤ ε‖x‖ ‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 2 / 28

Birkhoff orthogonality
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 3 / 28

Birkhoff orthogonalityG. Birkhoff, Orthogonality in linear metric spaces. Duke Math. J., 1 (1935), 169–172.
(X , ‖ · ‖) a real normed space.
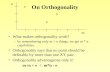
x⊥By :⇐⇒ ∀λ ∈ R : ‖x + λy‖ ≥ ‖x‖.
xy
x+λy
Figure: R2 with the maximum norm; x⊥By
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 4 / 28

Birkhoff orthogonalityG. Birkhoff, Orthogonality in linear metric spaces. Duke Math. J., 1 (1935), 169–172.
(X , ‖ · ‖) a real normed space.
x⊥By :⇐⇒ ∀λ ∈ R : ‖x + λy‖ ≥ ‖x‖.
xy
x+λy
Figure: R2 with the maximum norm; x⊥By
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 4 / 28

Birkhoff orthogonalityG. Birkhoff, Orthogonality in linear metric spaces. Duke Math. J., 1 (1935), 169–172.
(X , ‖ · ‖) a real normed space.
x⊥By :⇐⇒ ∀λ ∈ R : ‖x + λy‖ ≥ ‖x‖.
xy
x+λy
Figure: R2 with the maximum norm; x⊥By
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 4 / 28

Birkhoff orthogonalityG. Birkhoff, Orthogonality in linear metric spaces. Duke Math. J., 1 (1935), 169–172.
(X , ‖ · ‖) a real normed space.
x⊥By :⇐⇒ ∀λ ∈ R : ‖x + λy‖ ≥ ‖x‖.
xy
x+λy
Figure: R2 with the maximum norm; x⊥By
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 4 / 28

Approximate Birkhoff orthogonality
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 5 / 28

Approximate Birkhoff orthogonality
For ε ∈ [0, 1) we consider an ε-Birkhoff orthogonality ⊥εB.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure andAppl. Math. 6 (2005), Art. 79.
x⊥εBy :⇐⇒ ∀λ ∈ K : ‖x + λy‖2 ≥ ‖x‖2 − 2ε‖x‖ ‖λy‖.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality innormed spaces and its applications, Linear Algebra and itsApplications 531 (2017), 305–317.
x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 6 / 28

Approximate Birkhoff orthogonality
For ε ∈ [0, 1) we consider an ε-Birkhoff orthogonality ⊥εB.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure andAppl. Math. 6 (2005), Art. 79.
x⊥εBy :⇐⇒ ∀λ ∈ K : ‖x + λy‖2 ≥ ‖x‖2 − 2ε‖x‖ ‖λy‖.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality innormed spaces and its applications, Linear Algebra and itsApplications 531 (2017), 305–317.
x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 6 / 28

Approximate Birkhoff orthogonality
For ε ∈ [0, 1) we consider an ε-Birkhoff orthogonality ⊥εB.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure andAppl. Math. 6 (2005), Art. 79.
x⊥εBy :⇐⇒ ∀λ ∈ K : ‖x + λy‖2 ≥ ‖x‖2 − 2ε‖x‖ ‖λy‖.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality innormed spaces and its applications, Linear Algebra and itsApplications 531 (2017), 305–317.
x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 6 / 28

Approximate Birkhoff orthogonality
For ε ∈ [0, 1) we consider an ε-Birkhoff orthogonality ⊥εB.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure andAppl. Math. 6 (2005), Art. 79.
x⊥εBy :⇐⇒ ∀λ ∈ K : ‖x + λy‖2 ≥ ‖x‖2 − 2ε‖x‖ ‖λy‖.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality innormed spaces and its applications, Linear Algebra and itsApplications 531 (2017), 305–317.
x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 6 / 28

Approximate Birkhoff orthogonality
For ε ∈ [0, 1) we consider an ε-Birkhoff orthogonality ⊥εB.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure andAppl. Math. 6 (2005), Art. 79.
x⊥εBy :⇐⇒ ∀λ ∈ K : ‖x + λy‖2 ≥ ‖x‖2 − 2ε‖x‖ ‖λy‖.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality innormed spaces and its applications, Linear Algebra and itsApplications 531 (2017), 305–317.
x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 6 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By , x⊥z , ‖z − y‖ ≤ ε⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By , x⊥z , ‖z − y‖ ≤ ε⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By
, x⊥z , ‖z − y‖ ≤ ε⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By , x⊥z
, ‖z − y‖ ≤ ε⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By , x⊥z , ‖z − y‖ ≤ ε
⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

x⊥εBy ⇐⇒ ∃z ∈ Lin{x , y} : x⊥Bz , ‖z − y‖ ≤ ε‖y‖.
1−1
1
−1
x
y
z
Figure: R2 with l∞-l1-norm
x 6⊥By , x⊥z , ‖z − y‖ ≤ ε⇒ x⊥εBy .
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 7 / 28

For 0 6= x ∈ X we consider the class of its supporting functionals:
J(x) = {ϕ ∈ X ∗ : ‖ϕ‖ = 1, ϕ(x) = ‖x‖ }.
Theorem
Let X be a real normed space, x , y ∈ X and ε ∈ [0, 1). Then
x⊥εBy ⇔ ∃ϕ ∈ J(x) : |ϕ(y)| ≤ ε‖y‖.
In particular (James),
x⊥By ⇔ ∃ϕ ∈ J(x) : ϕ(y) = 0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 8 / 28

For 0 6= x ∈ X we consider the class of its supporting functionals:
J(x) = {ϕ ∈ X ∗ : ‖ϕ‖ = 1, ϕ(x) = ‖x‖ }.
Theorem
Let X be a real normed space, x , y ∈ X and ε ∈ [0, 1). Then
x⊥εBy ⇔ ∃ϕ ∈ J(x) : |ϕ(y)| ≤ ε‖y‖.
In particular (James),
x⊥By ⇔ ∃ϕ ∈ J(x) : ϕ(y) = 0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 8 / 28

For 0 6= x ∈ X we consider the class of its supporting functionals:
J(x) = {ϕ ∈ X ∗ : ‖ϕ‖ = 1, ϕ(x) = ‖x‖ }.
Theorem
Let X be a real normed space, x , y ∈ X and ε ∈ [0, 1). Then
x⊥εBy ⇔ ∃ϕ ∈ J(x) : |ϕ(y)| ≤ ε‖y‖.
In particular (James),
x⊥By ⇔ ∃ϕ ∈ J(x) : ϕ(y) = 0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 8 / 28

Applications
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 9 / 28

Orthogonality of operators on a Hilbert space
H – Hilbert space; L(H) – the space of linear bounded operators on H.For T ∈ L(H):
MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
R. Bhatia, P. Semrl, Orthogonality of matrices and some distanceproblems, Linear Algebra Appl. 287 (1999), 77-85.
Theorem (Bhatia-Semrl)
Let H be a Hilbert space and let T ,S ∈ L(H). Then, the followingconditions are equivalent:
(1) T⊥BS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, 〈Txn|Sxn〉 → 0 (n→∞).
Moreover, if dimH <∞ and T ,S ∈ L(H), then each of the aboveconditions is equivalent to:
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥Sx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 10 / 28

Orthogonality of operators on a Hilbert space
H – Hilbert space; L(H) – the space of linear bounded operators on H.For T ∈ L(H):
MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
R. Bhatia, P. Semrl, Orthogonality of matrices and some distanceproblems, Linear Algebra Appl. 287 (1999), 77-85.
Theorem (Bhatia-Semrl)
Let H be a Hilbert space and let T ,S ∈ L(H). Then, the followingconditions are equivalent:
(1) T⊥BS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, 〈Txn|Sxn〉 → 0 (n→∞).
Moreover, if dimH <∞ and T ,S ∈ L(H), then each of the aboveconditions is equivalent to:
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥Sx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 10 / 28

Orthogonality of operators on a Hilbert space
H – Hilbert space; L(H) – the space of linear bounded operators on H.For T ∈ L(H):
MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
R. Bhatia, P. Semrl, Orthogonality of matrices and some distanceproblems, Linear Algebra Appl. 287 (1999), 77-85.
Theorem (Bhatia-Semrl)
Let H be a Hilbert space and let T ,S ∈ L(H). Then, the followingconditions are equivalent:
(1) T⊥BS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, 〈Txn|Sxn〉 → 0 (n→∞).
Moreover, if dimH <∞ and T ,S ∈ L(H), then each of the aboveconditions is equivalent to:
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥Sx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 10 / 28

Orthogonality of operators on a Hilbert space
H – Hilbert space; L(H) – the space of linear bounded operators on H.For T ∈ L(H):
MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
R. Bhatia, P. Semrl, Orthogonality of matrices and some distanceproblems, Linear Algebra Appl. 287 (1999), 77-85.
Theorem (Bhatia-Semrl)
Let H be a Hilbert space and let T , S ∈ L(H). Then, the followingconditions are equivalent:
(1) T⊥BS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, 〈Txn|Sxn〉 → 0 (n→∞).
Moreover, if dimH <∞ and T ,S ∈ L(H), then each of the aboveconditions is equivalent to:
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥Sx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 10 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T ,S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T ,S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T , S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T , S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T , S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T , S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in L(H)
H – Hilbert space; T ∈ L(H); MT := {x ∈ SH : ‖Tx‖ = ‖T‖}.
Theorem
For T , S ∈ L(H) the following conditions are equivalent:
(1) T⊥εBS ;
(2) ∃ (xn)∞n=1 ⊂ SH : ‖Txn‖ → ‖T‖, limn→∞ | 〈Txn|Sxn〉 | ≤ ε‖T‖ ‖S‖.
Moreover, if dimH <∞, then the above conditions are equivalent to
(3) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, | 〈Tx0|Sx0〉 | ≤ ε‖T‖ ‖S‖.
If dimH <∞ or if T is compact and if additionally MT ⊂ MS , the abovethree conditions are equivalent also to
(4) ∃ x0 ∈ SH : ‖Tx0‖ = ‖T‖, Tx0⊥εSx0.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 11 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate orthogonality in C0(K )
L(H) Let K be a locally compact topological space.
C0(K ) := {f : K → R cont. : ∀ ε > 0, {t ∈ K : |f (t)| ≥ ε} compact}
– with the supremum norm. For f ∈ C0(K ), Mf := {t ∈ K : |f (t)| = ‖f ‖}(nonempty and compact).
Theorem
Let f , g ∈ C0(K ), f 6= 0 6= g . Assume that Mf is connected. Then, thefollowing conditions are equivalent:
(a) f⊥εBg ,
(b) ∃ t1 ∈ Mf : |g(t1)| ≤ ε‖g‖.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 12 / 28

Approximate symmetry of B-orthogonality
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 13 / 28

Symmetry of ⊥B
Birkhoff orthogonality ⊥B is generally not symmetric.
x
y
x+λy
y+λx
Figure: R2 with the maximum norm; x⊥By , y 6⊥Bx
If dimX ≥ 3 and ⊥B – symmetric, then X is an inner product space.If dimX = 2, then the symmetry of ⊥B is possible even if the norm doesnot come from an inner product (Radon plane).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 14 / 28

Symmetry of ⊥B
Birkhoff orthogonality ⊥B is generally not symmetric.
x
y
x+λy
y+λx
Figure: R2 with the maximum norm; x⊥By , y 6⊥Bx
If dimX ≥ 3 and ⊥B – symmetric, then X is an inner product space.If dimX = 2, then the symmetry of ⊥B is possible even if the norm doesnot come from an inner product (Radon plane).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 14 / 28

Symmetry of ⊥B
Birkhoff orthogonality ⊥B is generally not symmetric.
x
y
x+λy
y+λx
Figure: R2 with the maximum norm; x⊥By , y 6⊥Bx
If dimX ≥ 3 and ⊥B – symmetric, then X is an inner product space.If dimX = 2, then the symmetry of ⊥B is possible even if the norm doesnot come from an inner product (Radon plane).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 14 / 28

Symmetry of ⊥B
Birkhoff orthogonality ⊥B is generally not symmetric.
x
y
x+λy
y+λx
Figure: R2 with the maximum norm; x⊥By , y 6⊥Bx
If dimX ≥ 3 and ⊥B – symmetric, then X is an inner product space.
If dimX = 2, then the symmetry of ⊥B is possible even if the norm doesnot come from an inner product (Radon plane).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 14 / 28

Symmetry of ⊥B
Birkhoff orthogonality ⊥B is generally not symmetric.
x
y
x+λy
y+λx
Figure: R2 with the maximum norm; x⊥By , y 6⊥Bx
If dimX ≥ 3 and ⊥B – symmetric, then X is an inner product space.If dimX = 2, then the symmetry of ⊥B is possible even if the norm doesnot come from an inner product (Radon plane).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 14 / 28

Approximate symmetry of ⊥B
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhofforthogonality, J. Math. Anal. Appl. 461 (2018), 625–640.
Definition
The Birkhoff orthogonality relation in a normed space X is calledε-symmetric (for some ε ∈ [0, 1)), if for any x , y ∈ X :
x⊥By =⇒ y⊥εBx .
⊥B is ε-symmetric for some ε ∈ [0, 1) if and only if:
x⊥By =⇒ ∃ z ∈ Lin {x , y} : y⊥Bz , ‖z − x‖ ≤ ε‖x‖.
The approximate symmetry of ⊥B does not imply that the norm comesfrom an inner product (even if dimX ≥ 3).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 15 / 28

Approximate symmetry of ⊥B
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhofforthogonality, J. Math. Anal. Appl. 461 (2018), 625–640.
Definition
The Birkhoff orthogonality relation in a normed space X is calledε-symmetric (for some ε ∈ [0, 1)), if for any x , y ∈ X :
x⊥By =⇒ y⊥εBx .
⊥B is ε-symmetric for some ε ∈ [0, 1) if and only if:
x⊥By =⇒ ∃ z ∈ Lin {x , y} : y⊥Bz , ‖z − x‖ ≤ ε‖x‖.
The approximate symmetry of ⊥B does not imply that the norm comesfrom an inner product (even if dimX ≥ 3).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 15 / 28

Approximate symmetry of ⊥B
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhofforthogonality, J. Math. Anal. Appl. 461 (2018), 625–640.
Definition
The Birkhoff orthogonality relation in a normed space X is calledε-symmetric (for some ε ∈ [0, 1)), if for any x , y ∈ X :
x⊥By =⇒ y⊥εBx .
⊥B is ε-symmetric for some ε ∈ [0, 1) if and only if:
x⊥By =⇒ ∃ z ∈ Lin {x , y} : y⊥Bz , ‖z − x‖ ≤ ε‖x‖.
The approximate symmetry of ⊥B does not imply that the norm comesfrom an inner product (even if dimX ≥ 3).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 15 / 28

Approximate symmetry of ⊥B
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhofforthogonality, J. Math. Anal. Appl. 461 (2018), 625–640.
Definition
The Birkhoff orthogonality relation in a normed space X is calledε-symmetric (for some ε ∈ [0, 1)), if for any x , y ∈ X :
x⊥By =⇒ y⊥εBx .
⊥B is ε-symmetric for some ε ∈ [0, 1) if and only if:
x⊥By =⇒ ∃ z ∈ Lin {x , y} : y⊥Bz , ‖z − x‖ ≤ ε‖x‖.
The approximate symmetry of ⊥B does not imply that the norm comesfrom an inner product (even if dimX ≥ 3).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 15 / 28

Approximate symmetry of ⊥B
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhofforthogonality, J. Math. Anal. Appl. 461 (2018), 625–640.
Definition
The Birkhoff orthogonality relation in a normed space X is calledε-symmetric (for some ε ∈ [0, 1)), if for any x , y ∈ X :
x⊥By =⇒ y⊥εBx .
⊥B is ε-symmetric for some ε ∈ [0, 1) if and only if:
x⊥By =⇒ ∃ z ∈ Lin {x , y} : y⊥Bz , ‖z − x‖ ≤ ε‖x‖.
The approximate symmetry of ⊥B does not imply that the norm comesfrom an inner product (even if dimX ≥ 3).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 15 / 28

Sufficient conditions for approximate symmetry of ⊥B
A modulus of convexity of a normed space X , δX : [0, 2]→ [0, 1]:
δX (ε) := inf{
1−∥∥∥x + y
2
∥∥∥ : ‖x‖ ≤ 1, ‖y‖ ≤ 1, ‖x − y‖ ≥ ε}.
Theorem
If δX (1) > 0 and 1− 2δX (1) ≤ ε < 1, relation ⊥B is ε-symmetric.
Corollary
Suppose that for any ε ∈ [0, 1) the relation ⊥B is not ε-symmetric. Then
ε0(X ) := sup{ε ∈ [0, 2] : δX (ε) = 0} ≥ 1.
Moreover, if X is finite-dimensional, then R(X ) ≥ 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 16 / 28

Sufficient conditions for approximate symmetry of ⊥B
A modulus of convexity of a normed space X , δX : [0, 2]→ [0, 1]:
δX (ε) := inf{
1−∥∥∥x + y
2
∥∥∥ : ‖x‖ ≤ 1, ‖y‖ ≤ 1, ‖x − y‖ ≥ ε}.
Theorem
If δX (1) > 0 and 1− 2δX (1) ≤ ε < 1, relation ⊥B is ε-symmetric.
Corollary
Suppose that for any ε ∈ [0, 1) the relation ⊥B is not ε-symmetric. Then
ε0(X ) := sup{ε ∈ [0, 2] : δX (ε) = 0} ≥ 1.
Moreover, if X is finite-dimensional, then R(X ) ≥ 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 16 / 28

Sufficient conditions for approximate symmetry of ⊥B
A modulus of convexity of a normed space X , δX : [0, 2]→ [0, 1]:
δX (ε) := inf{
1−∥∥∥x + y
2
∥∥∥ : ‖x‖ ≤ 1, ‖y‖ ≤ 1, ‖x − y‖ ≥ ε}.
Theorem
If δX (1) > 0 and 1− 2δX (1) ≤ ε < 1, relation ⊥B is ε-symmetric.
Corollary
Suppose that for any ε ∈ [0, 1) the relation ⊥B is not ε-symmetric. Then
ε0(X ) := sup{ε ∈ [0, 2] : δX (ε) = 0} ≥ 1.
Moreover, if X is finite-dimensional, then R(X ) ≥ 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 16 / 28

Sufficient conditions for approximate symmetry of ⊥B
A modulus of convexity of a normed space X , δX : [0, 2]→ [0, 1]:
δX (ε) := inf{
1−∥∥∥x + y
2
∥∥∥ : ‖x‖ ≤ 1, ‖y‖ ≤ 1, ‖x − y‖ ≥ ε}.
Theorem
If δX (1) > 0 and 1− 2δX (1) ≤ ε < 1, relation ⊥B is ε-symmetric.
Corollary
Suppose that for any ε ∈ [0, 1) the relation ⊥B is not ε-symmetric. Then
ε0(X ) := sup{ε ∈ [0, 2] : δX (ε) = 0} ≥ 1.
Moreover, if X is finite-dimensional, then R(X ) ≥ 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 16 / 28

Sufficient conditions for approximate symmetry of ⊥B
Theorem
Let X be a real, uniformly convex normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a finite-dimensional real smooth normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a real uniformly convex and smooth Banach space. Then, theBirkhoff orthogonality relations in X , X ∗ and X ∗∗ are approximatelysymmetric (actually, with the same ε).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 17 / 28

Sufficient conditions for approximate symmetry of ⊥B
Theorem
Let X be a real, uniformly convex normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a finite-dimensional real smooth normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a real uniformly convex and smooth Banach space. Then, theBirkhoff orthogonality relations in X , X ∗ and X ∗∗ are approximatelysymmetric (actually, with the same ε).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 17 / 28

Sufficient conditions for approximate symmetry of ⊥B
Theorem
Let X be a real, uniformly convex normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a finite-dimensional real smooth normed space.Then, ⊥B is approximately-symmetric.
Theorem
Let X be a real uniformly convex and smooth Banach space. Then, theBirkhoff orthogonality relations in X , X ∗ and X ∗∗ are approximatelysymmetric (actually, with the same ε).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 17 / 28

There are spaces in which the Birkhoff orthogonality is not approximatelysymmetric, i.e., for any ε ∈ [0, 1), ⊥B is not ε-symmetric.
Example
X = R2 with the maximum norm.
x
yz
y+λx
y + λz
Figure: x⊥By , y 6⊥Bx , y 6⊥Bz , y 6⊥εBx
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 18 / 28

There are spaces in which the Birkhoff orthogonality is not approximatelysymmetric, i.e., for any ε ∈ [0, 1), ⊥B is not ε-symmetric.
Example
X = R2 with the maximum norm.
x
yz
y+λx
y + λz
Figure: x⊥By , y 6⊥Bx , y 6⊥Bz , y 6⊥εBx
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 18 / 28

There are spaces in which the Birkhoff orthogonality is not approximatelysymmetric, i.e., for any ε ∈ [0, 1), ⊥B is not ε-symmetric.
Example
X = R2 with the maximum norm.
x
yz
y+λx
y + λz
Figure: x⊥By , y 6⊥Bx , y 6⊥Bz , y 6⊥εBx
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 18 / 28

Geometrical properties connected with approximatesymmetry of B-orthogonality
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 19 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).
R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).
X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

R(X ) := sup{‖x − y‖ : conv {x , y} ⊂ SX}.
We consider the following property of X :
x , y ∈ X , x 6= y , conv {x , y} ⊂ SX =⇒ X is smooth at x − y . (∗)
Examples
Each smooth or strictly convex space satisfies (∗).R2 with the supremum norm (which is neither strictly convex nor smooth)also satisfies (∗).X = R2 with the norm for which the unit ball is a symmetric polygon suchthat sides are not parallel to diagonals, the condition (∗) is satisfied.
Theorem
Let X be a two-dimensional strictly convex normed space and let Y be astrictly convex and smooth normed space. Then the space L (X ,Y )satisfies (∗).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 20 / 28

Theorem
Let X be a real normed space satisfying (∗) and let ε ∈ (0, 1). If theorthogonality relation ⊥B in X is ε-symmetric, then R(X ) ≤ 2ε.
Corollary
If X is a real normed space satisfying (∗) and R(X ) = 2, then the Birkhofforthogonality in X is not approximately symmetric.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 21 / 28

Theorem
Let X be a real normed space satisfying (∗) and let ε ∈ (0, 1). If theorthogonality relation ⊥B in X is ε-symmetric, then R(X ) ≤ 2ε.
Corollary
If X is a real normed space satisfying (∗) and R(X ) = 2, then the Birkhofforthogonality in X is not approximately symmetric.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 21 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]S(X ) = 0 means that ⊥B is symmetric.S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]S(X ) = 0 means that ⊥B is symmetric.S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]
S(X ) = 0 means that ⊥B is symmetric.S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]S(X ) = 0 means that ⊥B is symmetric.
S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]S(X ) = 0 means that ⊥B is symmetric.S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

Symmetry constant S(X )
Definition
S(X ) := inf{ε ∈ [0, 1] : ∀ x , y ∈ X x⊥By ⇒ y⊥εBx}.
S(X ) ∈ [0, 1]S(X ) = 0 means that ⊥B is symmetric.S(X ) = 1 means that ⊥B is not approximately symmetric.
S(X ) = sup{S(X0) : X0 is a two-dimensional subspace of X}.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 22 / 28

If X is uniformly convex, then S(X ) < 1 (the reverse is not true).
If X satisfies (∗), then1
2R(X ) ≤ S(X ).
If X is a real uniformly convex and smooth Banach space, then
S(X ) = S(X ∗) = S(X ∗∗) < 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 23 / 28

If X is uniformly convex, then S(X ) < 1 (the reverse is not true).
If X satisfies (∗), then1
2R(X ) ≤ S(X ).
If X is a real uniformly convex and smooth Banach space, then
S(X ) = S(X ∗) = S(X ∗∗) < 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 23 / 28

If X is uniformly convex, then S(X ) < 1 (the reverse is not true).
If X satisfies (∗), then1
2R(X ) ≤ S(X ).
If X is a real uniformly convex and smooth Banach space, then
S(X ) = S(X ∗) = S(X ∗∗) < 1.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 23 / 28

Example
Let X = R2 with an l1-l∞ norm.
For δ > 0 let Y = Yδ = R2 with the norm such that the unit sphere is ahexagon with vertices at
y1 = (1, 0), y2 = (0, 1), y3 = (−1− δ, 1− δ), y4 = (−1, 0),
y5 = (0,−1), y6 = (1 + δ,−1 + δ).
x1 = y1
x2 = y2
x3
y3
x4 = y4
x5 = y5 x6
y6
Figure: Unit spheres in X and Y
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 24 / 28

Example
Let X = R2 with an l1-l∞ norm.For δ > 0 let Y = Yδ = R2 with the norm such that the unit sphere is ahexagon with vertices at
y1 = (1, 0), y2 = (0, 1), y3 = (−1− δ, 1− δ), y4 = (−1, 0),
y5 = (0,−1), y6 = (1 + δ,−1 + δ).
x1 = y1
x2 = y2
x3
y3
x4 = y4
x5 = y5 x6
y6
Figure: Unit spheres in X and Y
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 24 / 28

Example
Let X = R2 with an l1-l∞ norm.For δ > 0 let Y = Yδ = R2 with the norm such that the unit sphere is ahexagon with vertices at
y1 = (1, 0), y2 = (0, 1), y3 = (−1− δ, 1− δ), y4 = (−1, 0),
y5 = (0,−1), y6 = (1 + δ,−1 + δ).
x1 = y1
x2 = y2
x3
y3
x4 = y4
x5 = y5 x6
y6
Figure: Unit spheres in X and Y
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 24 / 28

It can be checked that the Banach-Mazur distance d(X ,Y ) can bearbitrarily close to 1; namely:
d(X ,Y ) ≤ 1 + δ
1− δ.
The space X is a Radon plane, therefore S(X ) = 0.
No matter how small is δ > 0, the space Y satisfies (∗), whence
S(Y ) ≥ 1
2R(Y ) >
1
2.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 25 / 28

It can be checked that the Banach-Mazur distance d(X ,Y ) can bearbitrarily close to 1; namely:
d(X ,Y ) ≤ 1 + δ
1− δ.
The space X is a Radon plane, therefore S(X ) = 0.
No matter how small is δ > 0, the space Y satisfies (∗), whence
S(Y ) ≥ 1
2R(Y ) >
1
2.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 25 / 28

It can be checked that the Banach-Mazur distance d(X ,Y ) can bearbitrarily close to 1; namely:
d(X ,Y ) ≤ 1 + δ
1− δ.
The space X is a Radon plane, therefore S(X ) = 0.
No matter how small is δ > 0, the space Y satisfies (∗)
, whence
S(Y ) ≥ 1
2R(Y ) >
1
2.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 25 / 28

It can be checked that the Banach-Mazur distance d(X ,Y ) can bearbitrarily close to 1; namely:
d(X ,Y ) ≤ 1 + δ
1− δ.
The space X is a Radon plane, therefore S(X ) = 0.
No matter how small is δ > 0, the space Y satisfies (∗), whence
S(Y ) ≥ 1
2R(Y ) >
1
2.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 25 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).If p → 2, then q → 2 and d → 1.Therefore
limp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).If p → 2, then q → 2 and d → 1.Therefore
limp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).If p → 2, then q → 2 and d → 1.Therefore
limp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).
If p → 2, then q → 2 and d → 1.Therefore
limp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).If p → 2, then q → 2 and d → 1.
Thereforelimp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

S(lpn ) (p > 1)
The Banach-Mazur distance between lpn and l2n is equal to:
d := d(lpn , l2n ) = n
∣∣∣ 1p− 1
2
∣∣∣.
We were able to estimate that for p > 1, sufficiently close to 2, we have
S(lpn ) ≤ max
{(2p −
(1 +
1
d2
)p) 1p
,
(2q −
(1 +
1
d2
)q) 1q
}
(with q such that 1p + 1
q = 1).If p → 2, then q → 2 and d → 1.Therefore
limp→2
S(lpn ) = 0 = S(l2n ).
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 26 / 28

Thank you!
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 27 / 28

Bibliography
J. Alonso, H. Martini, S. Wu, On Birkhoff orthogonality and isosceles orthogonality in normed linear spaces, Aequationes
Math. 83, No. 1-2 (2012), 153-189.
R. Bhatia, P. Semrl, Orthogonality of matrices and some distance problems, Linear Algebra Appl. 287 (1999), 77-85.
G. Birkhoff, Orthogonality in linear metric spaces, Duke Math. J., 1 (1935), 169–172.
J. Chmielinski, On an ε-Birkhoff orthogonality, J. Inequal. Pure and Appl. Math., 6(3) (2005), Art. 79.
J. Chmielinski, T. Stypu la, P. Wojcik, Approximate orthogonality in normed spaces and its applications, Linear Algebra
Appl. 531 (2017), 305–317.
J. Chmielinski, P. Wojcik, Approximate symmetry of the Birkhoff orthogonality, J. Math. Anal. Appl. 461 (2018),
625–640.
R.C. James, Orthogonality in normed linear linear spaces, Duke Math. J. 12 (1945), 291–301.
R.C. James, Orthogonality and linear functionals in normed linear spaces, Trans. Amer. Math. Soc., 61 (1947), 265–292.
R.C. James, Inner products in normed linear spaces, Bull. Am. Math. Soc. 53 (1947), 559-566.
J. Chmielinski (Krakow, Poland) Approximate Birkhoff orthogonality Lviv 2019 28 / 28
Related Documents