THE OPEN UNIVERSITY OF TANZANIA Institute of Continuing Education FOUNDATION PROGRAMME OFP 010 PHYSICS

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
THE OPEN UNIVERSITY OF TANZANIA
Institute of Continuing Education
FOUNDATION PROGRAMME
OFP 010
PHYSICS
2
Published by:
The Open University of Tanzania Kawawa Road,
P. O. Box 23409,
Dar es Salaam. TANZANIA
www.out.ac.tz
First Edition: 2013 Second Edition 2018
Copyright © 2018
All Rights Reserved
ISBN 978 9987 00 250 4

3
Table of Contents
GENERAL INTRODUCTION ........................................................................................... 7
SECTION ONE: RECTILINEAR MOTION .................................................................... 8
Lecture 1: Some Fundamental Concepts of Measurements ........................................... 8 1.1 Introduction ............................................................................................................ 8 1.2 Units of Measurements ........................................................................................... 8
1.3 Units of Base Quantities and their Definitions ......................................................... 9 1.4 Units of Supplementary Quantities ........................................................................ 10
1.5 Derived Units and their Definitions ....................................................................... 10 1.6 Dimensions, Units and Significant Figures ............................................................ 11
1.7 Idealization, Approximation and Precision ............................................................ 11 1.8 Errors, Accuracy and Precision ............................................................................. 12
Lecture 2: Motion in One-dimension ............................................................................ 15 2.1 Introduction .......................................................................................................... 15
2.2 Position ................................................................................................................. 15 2.3 Instantaneous Velocity and Speed ......................................................................... 16
2.4 Acceleration .......................................................................................................... 17 2.5 Equations of Motion under Constant Acceleration ................................................. 17
2.6 Kinematic Equations and Free Fall ........................................................................ 22 2.7 Free-fall Acceleration............................................................................................ 22
Lecture 3: Vectors .......................................................................................................... 25 3.1 Introduction .......................................................................................................... 25
3.2 Addition of Vectors ............................................................................................... 25 3.3 Properties of Vector Addition................................................................................ 25
3.4 Vectors and their Components............................................................................... 26 3.5 Unit Vectors .......................................................................................................... 27
3.6 Adding Vectors by Components ............................................................................ 27 3.7 Multiplying Vectors .............................................................................................. 28
3.8 Vector Product ...................................................................................................... 28
Lecture 4: Newton’s Laws of Motion ............................................................................ 35 4.1 Introduction .......................................................................................................... 35 4.2 Newton’s First Law ............................................................................................... 35
4.3 Newton’s Second Law .......................................................................................... 36 4.4 Some Particular Forces.......................................................................................... 37
Lecture 5: Action and Reaction Forces ....................................................................... 44 5.1 Introduction .......................................................................................................... 44
5.2 Newton’s Third Law ............................................................................................. 44 5.3 Friction ................................................................................................................. 44
5.4 Properties of Friction ............................................................................................ 46
4
SECTION TWO: MECHANICS ...................................................................................... 62
Lecture 6: Work, Energy and Power ............................................................................ 62 6.1 Introduction .......................................................................................................... 62 6.2 Work ..................................................................................................................... 62
6.3 Power.................................................................................................................... 64 6.4 Energy .................................................................................................................. 65
6.5 Work-Energy Theorem ......................................................................................... 72 6.6 Conservation of Mechanical Energy ...................................................................... 75
Lecture 7: Uniform Circular Motion .......................................................................... 88 7.1 Introduction .......................................................................................................... 88
7.2 False Sensation of an Outward Force .................................................................... 88 7.3 The Universe and the Gravitational Force ............................................................. 91
7.4 Kepler’s Laws ....................................................................................................... 94 7.5 Planetary and Satellite Motion............................................................................... 96
7.6 Weightlessness .................................................................................................... 100
Lecture 8: Fluid Dynamics .......................................................................................... 103 8.1 Introduction ........................................................................................................ 103 8.2 Fluids at Rest ...................................................................................................... 104
8.3 Hydraulic Lever .................................................................................................. 104 8.4 Equilibrium of Floating Objects .......................................................................... 105
SECTION THREE: ELECTROSTATICS AND ELECTRIC CIRCUITS .................. 107
Lecture 9 Electrostatics ........................................................................................... 107 9.1 Introduction ........................................................................................................ 107
9.2 Electric Charge and Coulomb’s Law ................................................................... 108 9.3 Electric Point Charge .......................................................................................... 108
9.4 Coulomb’s Law of Force ..................................................................................... 108 9.6 Principle of Superposition ................................................................................... 110
Lecture 10 Electric Field ............................................................................................ 113 10.1 Introduction ........................................................................................................ 113
10.2 Concept of Electric Field ..................................................................................... 113 10.3 Electric Field due to a Point Charge .................................................................... 114
10.4 Electric Lines of Force ........................................................................................ 114 10.5 Electric Potential Energy and Electric Potential ................................................... 115
Lecture 11 Capacitance ............................................................................................ 119 11.1 Introduction ........................................................................................................ 119
11.2 The Capacitance of a Capacitor ........................................................................... 121 11.3 The Dielectric of a Capacitor............................................................................... 123
11.4 Applications ........................................................................................................ 127 11.5 Capacitors in Parallel and in Series Configurations ............................................. 127
11.6 Energy Storage in an Electric Field ..................................................................... 136 11.7 Charging and Discharging a Capacitor ................................................................ 138
Lecture 12 Rc Electric Circuits .................................................................................. 143 12.1 Introduction ........................................................................................................ 143
12.2 Kirchhoff’s Laws ................................................................................................ 143 12.3 Current Loop Method .......................................................................................... 144
5
SECTION FOUR: ELECTROMAGNETISM ............................................................... 149
Lecture 13: The Magnetic Field .................................................................................... 149 13.1 Introduction ........................................................................................................ 149 13.2 Magnetic Field Lines .......................................................................................... 150
13.3 Magnetic Force on a Moving Electric Charge...................................................... 150 13.4 Work Done in a Magnetic Field .......................................................................... 151
13.5 Magnetic Force on a Conductor Carrying a Current ............................................ 153 13.6 Faraday’s Law of Electromagnetic Induction ...................................................... 154
13.7 Lenz's Law .......................................................................................................... 155
Lecture 14: Inductance and RI Electric Circuits ....................................................... 157 14.1 Introduction ........................................................................................................ 157 14.2 Self-inductance ................................................................................................... 157
14.3 Mutual Inductance .............................................................................................. 159 14.4 Combination of Self-inductances......................................................................... 160
14.5 LR Circuits ......................................................................................................... 161 14.6 Energy Storage in a Magnetic Field ..................................................................... 163
14.7 The Alternating Current ...................................................................................... 164
SECTION FIVE: OSCILLATIONS .............................................................................. 169
Lecture 15: Oscillations and Waves............................................................................ 169 15.1 Introduction ........................................................................................................ 169 15.2 Definition of an Oscillating System ..................................................................... 170
15.3 Variables of an Oscillation .................................................................................. 170 15.4 The Basic Simple Harmonic Equation ................................................................. 171
15.5 Features and Characteristics of SHM................................................................... 173 15.6 Energy of a Simple Harmonic Oscillator ............................................................. 174
15.7 Applications of Simple Harmonic Motion ........................................................... 175
Lecture 16: Damped Simple Harmonic Oscillations .................................................. 180 16.1 Introduction ........................................................................................................ 180 16.2 Damping Forces .................................................................................................. 180
16.3 Effect of Damping............................................................................................... 181 16.4 Forced Oscillations and Resonance ..................................................................... 182
Lecture 17: Wave Motion ....................................................................................... 188 17.1 Introduction ........................................................................................................ 188
17.2 Waves versus Oscillations ................................................................................... 189 17.3 Mechanical Waves .............................................................................................. 189
17.4 Wave Characteristics ........................................................................................... 190 17.5 Variables of Wave Motion .................................................................................. 192
17.6 Mathematical Description of Waves .................................................................... 193 17.7 Wave Equation.................................................................................................... 194
17.8 Interference of Waves ......................................................................................... 195 17.9 Standing Waves .................................................................................................. 197
6
SECTION SIX: ELECTRONICS................................................................................... 200
Lecture 18: Electronics ................................................................................................... 200 18.1 Introduction ........................................................................................................ 200 18.2 Diode Valve/Vacuum Tube ................................................................................. 202
18.3 Diode Rectification ............................................................................................. 204 18.4 Semiconductor electronics .................................................................................. 205
18.5 Intrinsic Semiconductors: Electrons and Holes .................................................... 206 18.6 Extrinsic Semiconductors .................................................................................... 207
7
GENERAL INTRODUCTION
Physics, as opposed to natural philosophy (with which it was grouped until the 19th century),
relies upon scientific methods in order to describe the natural world. To understand the
fundamental principles of the universe, physics utilizes many workings from the other natural
sciences. Because of this overlap, phenomena studied in physics (conservation of energy for
example) are common to all material systems. The specific ways in which they apply to
energy (hence, physics) are often referred to as the "laws of physics." Because each of the
other natural sciences i.e. biology, chemistry, geology, material science, medicine,
engineering, and others, work with systems which adhere to the laws of physics, physics is
often referred to as the "fundamental science."
Course Description
The course is designed to provide general physics knowledge. The course introduces to
students the behaviour of physical bodies when subjected to forces or displacements, and the
subsequent effect of the bodies on their environment. It also describes the forces exerted by a
static (i.e. unchanging) electric field upon charged (electrostatics), as well as wave motions. It
therefore equips the learners with the general understanding of theoretical aspects as well as
basic practical skills of physics.
Course Objectives
On completion of this course, students are expected to able to do the following:
1. Define various physics concepts such as Mechanics, Electrostatics, Electromagnetism,
Self inductance, Oscillations and waves
2. State and apply various laws in physics i.e. Newton’s law of motion, Kepler’s Law
and its application in planetary motion, Pascal’s Principle, Coulombs law.
3. Compute various quantities of energy e.g. the energy stored in capacitors, Compute
power in alternating current circuits, energy stored in magnetic field, energy of simple
harmonic motion.
4. Manipulate vectors, RC electric circuits and RL Electric Circuits
5. Explain the Interferences of waves
6. Describe vacuum tube, semiconductor diode and various logic gates.
Pre-requisite To be able to do this course, students must have studied Physics at the ordinary level of
secondary education.
Mode of Assessment Continuous Assessment: 30%
Final Examination: 70%
8
SECTION ONE:
RECTILINEAR MOTION
Lecture 1: Some Fundamental Concepts of Measurements
1.1 Introduction Measurement is at the heart of physics. The ability to make measurements of physical
quantities is necessary for an understanding of the physical world we live in. A famous
physicist once said that when you can measure what you are speaking about, and express it in
numbers, you know something about it; but when you cannot express it in numbers, your
knowledge is of a meagre and unsatisfactory kind.
A physicist would ask questions such as: What is the time interval between two events; what
is the length between two points, A and B; what is the temperature of boiling water; etc. The
quantities which one measures are involved in the laws of physics and hence they are called
physical quantities. Among these quantities are: Mass, Length, Time, Temperature, Pressure,
Electrical resistance, etc.
In order to describe a physical quantity a unit is defined, which is a measure of the quantity
that is defined to be exactly 1.0. After a unit is defined, a standard is defined. The standard is
a reference to which all other examples of the quantity are compared.
The standard ensures that scientists around the world may agree on the measurements they
take. Some physical quantities such as speed are expressed in terms of other quantities, so
that we have base quantities and their standards and derived quantities.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
Define the SI units of measurement.
Describe the base quantities.
Describe the derived units.
Define error, accuracy and precision.
1.2 Units of Measurements
SI units are currently divided into three classes:
(i) Base units
(ii) Derived units
(iii) Supplementary units
9
The three classes together form the “coherent system of SI units”.
1. SI Base units: There are seven base quantities of measurements. These are mass,
length, time, temperature, electric current, luminous intensity and amount of
substance.
2. SI Supplementary units: These are two – the radian and steradian.
3. SI Derived units: These are many including volume, speed, velocity, acceleration,
density, current density, etc.
The definitions of the SI units for the seven base quantities, two supplementary quantities and
some of the derived units are given below.
1.3 Units of Base Quantities and their Definitions
The international system of units devised seven base quantities as part of the metric system
and these quantities are defined as under:
1. Mass: The fundamental unit of mass is the Kilogram (kg). The definition of the
kilogram is based on the International Prototype Kilogram, a 90% platinum and 10%
iridium alloy cylinder of equal height and diameter.
2. Length: The fundamental unit of length is the Metre (m). The metre is defined as the
distance between two known points on an International Prototype metre kept at in
France. There are two modern definitions of the metre:
(a) The length equal to 1,650,763.73 wavelengths in vacuum of radiation emitted
by the krypton 86 nuclide.
(b) The length of the path travelled by light in vacuum during a time interval of 1/
299,792,458 of a second. This definition also fixes the speed of light in
vacuum at exactly 299,792,458 m.s–1.
You will note that these are very precise definitions.
3. Time: The fundamental unit of time is the Second (s). The current definition of a
second is the duration of 9,192,631,770 periods of the radiation corresponding to the
transition between the two hyperfine levels of the ground state of the 133Cs atom.
4. Thermodynamic Temperature: The fundamental unit of thermodynamic temperature,
pegged on the triple point of water, is the Kelvin (K). The triple point of water is
assigned a value of 273.16 K on this scale, and the Kelvin is thus defined as the
fraction 1/273.16 of the thermodynamic temperature of the triple point of water.
5. Electric Current: The fundamental unit of electric current is the Ampere (A). The
current definition of ampere is that constant current which, if maintained in two
straight parallel conductors of infinite length, of negligible circular
cross-sectional area and placed one metre apart in vacuum, would produce between
these conductors a force equal to 2 × 10–7 Nm–1.
6. Luminous Intensity: The fundamental unit of luminous intensity is the Candela (cd).
This is defined as the luminous intensity, in a given direction, of a source that emits
10
monochromatic radiation of frequency 540 × 1012 Hz and that has a radiant intensity
in that direction of (1/683) watt per steradian.
7. Amount of Substance: The fundamental unit of the amount of substance is the Mole
(mol). This is defined as the amount of substance of a system which contains as many
elementary entities as there are atoms in 1.2 × 10-2 kilogram of carbon - 12. Entity
may refer to atoms, molecules, ions, electrons, or other particles.
1.4 Units of Supplementary Quantities
The two units of supplementary quantities are as discussed below:
1. Plane Angle: Plane angles are measured in Radians (rad.). The radian is a plane angle
between two radii of a circle which cut off on the circumference an arc equal in length
to the radius.
2. Solid Angle: Solid angles are measured in Steradians (sr.). This is the solid angle
which, having its vertex at the centre of a sphere, cuts off an area of the surface of the
sphere equal to that of a square with sides of length equal to the radius of the sphere.
1.5 Derived Units and their Definitions
Derived units are obtained from the fundamental and/or supplementary units. There are many
units under this category. The important ones are defined below.
1. Force: The SI unit of force is the Newton (N). This is that force which, when acting
on a mass of one kilogram, gives it an acceleration of one metre per second per
second.
2. Work, Energy and Quantity of Heat: In the SI system, these quantities are all
measured in Joules (J). The joule is defined as the work done by a force of one newton
when its point of application is moved through a distance of one metre in the direction
of the force (or the energy needed to do this amount of work).
3. Power: The SI unit of power is the Watt (W). This is the ability to perform work (or
to generate or dissipate energy) at a rate of one joule per second.
4. Electric Charge: The SI unit of electric charge is the Coulomb (C). This is the
quantity of electricity transported in one second by a current of one ampere.
5. Electric Potential: This SI unit of electric potential is the Volt (V). This is the
difference of potential between two points of a conductor which carries a constant
current of one ampere, when the power dissipated between these two points is one
watt.
6. Electric Capacitance: The SI unit of electric capacitance is the Farad (F). The
capacitance of a given capacitor is one farad if when charged with a quantity of
electricity equal to one coulomb, the difference of potential attained between its plates
is one volt.
7. Electric Resistance: The SI unit of electric resistance is the OHM (). This is the
resistance between two points of a conductor when a constant difference of potential
11
of one volt applied between these two points produces a current of one ampere in the
conductor.
8. Magnetic Flux: The SI unit of magnetic flux is the Weber (Wb). This is that flux
which, when linking a circuit of one turn, and being reduced to zero at a uniform rate
in one second, produces in the circuit an electromotive force of one volt.
9. Electric Inductance: The SI unit of electric inductance is the Henry (H). This is the
inductance of a closed circuit in which an electromotive force of one volt is produced
when the electric current in the circuit varies uniformly at the rate of one ampere per
second.
10. Luminous Flux: The SI unit of luminous flux is the Lumen (lm). This is the flux
emitted in a solid angle of one steradian by a point source having a uniform intensity
of one candela.
11. Illumination: The SI unit of illumination is the Lux (lx). This is an illumination of
one lumen per square metre.
1.6 Dimensions, Units and Significant Figures
The dimension of a quantity is the physical property that it describes. So that all terms in an
equation must have the same dimensions, for example, mass cannot be compared with length,
and an equation such as mass = length is meaningless.
A measurement of a physical quantity must have with it dimensions, units and precision.
Hence a measurement result such as 4.2 m implies that the dimension of the physical quantity
is length, measured in metres, to one significant figure, which is the precision with which the
measurement was made.
Activity 1.1
1. What is the difference between dimensions and units?
2 A butcher gives a result of a measurement of a cut of meat as 4.4869 kg.
Give comments on the measurement.
1.7 Idealization, Approximation and Precision
One of the most difficult things that the student of physics must accept is the fact that no
answer is the correct answer. We are limited by the precision of our experiments, the
sophistication of the mathematics we use to model the systems we are studying, and by the
very complexity of those systems.
A common way to evaluate the quantitative behaviour of a system which is too complicated to
treat precisely is to compute the "order of magnitude" of one (or more) of its variables. The
order of magnitude of a quantity is given by the power of 10 which characterizes the scale of
the quantity. For example, current estimates place the age of the universe at from 5 to 15 billion
years. The order of magnitude of the age of the universe is then 1010 years which is 10 billion
12
years. Many times, we will be very happy if our computational results are of the same order of
magnitude as our experimental results!
At this point in time, a reminder about order of magnitude prefixes may be in order:
k = kilo (103); M = mega (106); G = giga (109); T = tera (1012)
c = centi (10–2); m = milli (10–3); μ = micro (10–6); n = nano (10–9); p = pico (10–12)
1.8 Errors, Accuracy and Precision
If a given physical quantity is measured (repeatedly under identical conditions) by a given
measuring instrument, the results obtained are not always identical. This leaves a degree of
uncertainty as to which of the results obtained is the most representative of the true value of
the quantity being measured. The true value of a physical quantity is itself an ideal and is
never known. This is because an ideally accurate instrument is needed to measure it (all
available instruments will leave a degree of uncertainty no matter how small this may be). For
all practical purposes, the expected value (the conventional value) is adopted to represent the
true value. The expected value is an approximation to the true value such that the difference
between them has no practical significance. Three terms are used alternatively to express
uncertainty in a measurement: error, accuracy and precision.
Errors
Errors in measurement are discrepancies between measured values and corresponding
expected values. They are expressed in two forms: absolute errors and relative errors.
The absolute error of a measurement Ea is the magnitude of a deviation between the measured
value and the expected value of the quantity measured.
Ea = Xm – Xe
where, Xm is the measured value and Xe = Expected value.
The relative error of a measurement Er, normally expressed in percentage, is a ratio of the
absolute error to the expected value.
Er = 100(Xm – Xe)/(Xe)
Errors are further categorised under three major classes: gross errors, systematic errors and
random errors.
1. Gross Errors: These are errors associated with human blunder in making the
measurement, such as incorrect reading of the instrument, incorrect recording of the
observed value and incorrect use of the instrument.
2. Systematic Errors: These are errors associated with inherent problems of the
instrument, environmental effects and observational problems.
3. Random Errors: These are those errors remaining after substantially reducing or
accounting for the gross and systematic errors. They result from the accumulation of a
large number of small effects.
13
Accuracy
Accuracy refers to the closeness between a measured value (Xm) and the expected value (Xe).
The narrower the gap between Xm and Xe, the higher the accuracy (and the lower the error).
Precision
Precision is an indicator of the consistency or reproducibility of the results of a measurement.
That is, if a given physical quantity is measured repeatedly under given conditions by a given
measuring instrument, the variability of the results obtained is an indicator of the precision of
the instrument. A precise instrument indicates readings clustered together about their mean.
This mean of readings may or may not be close to the expected value. Therefore, a precise
instrument is not necessarily accurate and vice-versa.
A chosen measuring instrument must be sufficiently accurate and precise to serve the
intended duty.
Exercise 1. The period of a simple pendulum, defined as the time for one complete oscillation, is
measured in time units and is given by:
2l
Tg
where l is the length of the pendulum and g is the acceleration due to gravity. Show
that this equation is dimensionally consistent, i.e. show that the right hand side of this
equation gives units of time.
2 Astronomical distances are so large compared to terrestrial ones that much larger units
of length are used for easy comprehension of the relative distances of astronomical
objects. An astronomical unit (AU) is equal to the average distance from the Earth to
the Sun, about 1.50 × 108 km. A parsec (pc) is the distance at which 1 AU would
subtend an angle of exactly 1 second of arc. A light-year (ly) is the distance that light,
travelling through a vacuum with a speed of 3.0 × 108 m/s, would cover in 1.0 year.
(a) Express the distance from the Earth to the Sun in parsecs and in light-years.
(b) Express the speed of light in terms of astronomical units per minute.
3. During a total eclipse, your view of the Sun is almost exactly replaced by your view
of the Moon. Assuming that the distance from you to the Sun is about 400 times the
distance from you to the Moon, (a) find the ratio of the Sun’s diameter to the Moon’s
diameter. (b) What is the ratio of their volumes?
4. A person on diet might lose 2.3 kg per week. Express the mass loss rate in milligrams
per second.

14
Summary
Measurement is the determination of the size or magnitude of something by comparing it with
some standard quantity of equal nature, known as measurement unit. Scales are used to
measure. In physics we have certain scales for certain quantities. In this lecture we have
learned that there are three classes of measurements units, which together form the SI system
of units, i.e. the base units, derived units and supplementary units. We have also discussed
approximation, accuracy and precision as important concepts in measurement.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition. John
Wiley and Sons.
Gottys, W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern. McGraw
Hill.
A.K. Jha, (2009). A Textbook of Applied Physics, I.K. International Pub.
E.F. Redish, (2003). Teaching Introductory Physics with the Physics Suite. John Wiley &
Sons.
Daniel Kleppner and Robert J. Kolenkow (2007). An Introduction To Mechanics. Tata
Mcgraw-Hill Education.
Rogers Muncaster, A-Level Physics, 4th Edition, Oxford Press.
15
Lecture 2: Motion in One-dimension
2.1 Introduction
The motion of objects in one-dimension can be described using words, diagrams, numbers,
graphs, and equations. We shall discuss the language of kinematics and equations of
kinematics; where Kinematics is defined as the science of describing the motion of objects
using words, diagrams, numbers, graphs, and equations.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Describe motion of objects in one dimension.
ii. Define scalars and vectors.
iii. Write equations of motion under constant acceleration.
iv. Use the kinematic equations to determine information about an object's motion.
2.2 Position
This is a location of an object in space relative to a reference point, often called the origin of
an axis such as the x-axis.
Scalars and Vectors
Description of motion of objects using words, involves words such as distance, displacement,
speed, velocity and acceleration. These (words) mathematical quantities can be divided into
two categories. The quantity is either a vector or a scalar, distinguished from one another by
their distinct definitions:
(i) Scalars are quantities which are fully described by a magnitude alone.
(ii) Vectors are quantities which are fully described by both a magnitude and a direction.
Distance and Displacement
Distance and displacement are two quantities which may seem to mean the same thing, yet
they have distinctly different meanings and definitions.
(i) Distance is a scalar quantity which refers to "how much ground an object has
covered" during its motion.
(ii) Displacement is a vector quantity which refers to a change of position from x1 to
another final position x2.
12 xxx where the symbol Δ represents a change in a quantity.

16
To test your understanding of this distinction, consider the motion of a physics teacher who
walks 4 metres east, 2 metres south, 4 metres west, and finally 2 metres north. Even though
the physics teacher has walked a total distance of 12 metres, her displacement is 0 metres.
During the course of her motion, she has "covered 12 m of ground"
(distance = 12 m). Yet, when she is finished walking, she is back to her starting point – i.e.
there is no displacement for her motion. Displacement, being a vector quantity, must give
attention to direction. The 4 m east is cancelled by the 4 m West; and the 2 m south is
cancelled by the 2 m North.
Speed and Velocity
Just as distance and displacement have distinctly different meanings (despite their
similarities), so do speed and velocity.
1. Speed is a scalar quantity which refers to "how fast an object is moving." A fast-
moving object has a high speed while a slow-moving object has a low speed. An
object with no movement at all has a zero speed.
2. Velocity is a vector quantity which refers to "the rate at which an object changes its
position." Imagine a person moving rapidly – one step forward and one step back –
always returning to the original starting position. While this might result in a frenzy of
activity, it would also result in a zero velocity. Since velocity is defined as the rate at
which the position changes, this motion results in zero velocity.
3. Average Speed: The average speed s is the total distance travelled in a given time
interval
Total distance
ts
4. Average Velocity: This is a displacement x that occurs over a time interval t
2 1
2 1
vx xx
t t t
… (1.2)
2.3 Instantaneous Velocity and Speed
The instantaneous velocity is the average velocity when the time interval is limitingly small
0lim t
x dxv
t dt
… (1.3)
Alternatively the instantaneous velocity is the rate at which a particle’s position x is changing
with time t at a given instant.
(i) Instantaneous Speed: It is the speed at any given instant in time. You might think of
the instantaneous speed as the speed which the speedometer reads at any given instant
in time and the average speed as the average of all the speedometer readings during
the course of the trip.
(ii) Constant Speed: Moving objects don't always travel with erratic and changing speeds.
Occasionally, an object will move at a steady rate with a constant speed. That is, the
object will cover the same distance every regular interval of time.
17
2.4 Acceleration
The final kinematic quantity to be discussed is acceleration.
(i) Acceleration is a vector quantity which is defined as "the rate at which an object
changes its velocity." An object is accelerating if it is changing its velocity.
(ii) The instantaneous acceleration or simply acceleration is the rate of change of
velocity over a limitingly small interval of time, i.e. the derivative of velocity
dv
adt
… (1.4)
The average acceleration is the rate of change of velocity over a given interval of time
2 1
2 1
v vva
t t t
… (1.5)
The human body reacts to accelerations (it is a kind of an accelerometer) but does not
react to velocities (it is not a speedometer).
(iii) Direction of the Acceleration Vector: The direction of the acceleration vector
depends on two factors:
o whether the object is speeding up or slowing down
o whether the object is moving in the positive (+) or negative (–) direction
The general Rule of Thumb is: If an object is slowing down, then its acceleration is
in the opposite direction of its motion.
(iv) Constant Acceleration
In many common types of motion the acceleration is either constant or approximately
so.
The acceleration is constant when an accelerating object changes its velocity by the
same amount each second.
2.5 Equations of Motion under Constant Acceleration
When the acceleration is constant, there is no distinction between average and instantaneous
acceleration.
From the definition of acceleration, Equation (1.5)
dv
adt
dv = adt
Integrating we have v adt = at + C
Where C is a constant of integration obtained from the initial conditions that at t = 0,
v = v0.

18
v = v0 + at … (1.6)
From the definition of velocity, Equation (1.3)
dxv
dt dx = vdt
Integrating we have x vdt
But from Equation (1.6) we have
0x v at dt = 20
1
2v t at C
where C is a constant of integration.
From the initial conditions that x = x0, t = 0, we have C = x0,
20 0
1
2x – x =v t + at … (1.7)
Equations 1.6 and 1.7 are the basic equations for motion in one dimension under constant
acceleration. They can be combined in three ways to yield three additional equations.
Eliminating t in Equation (1.7), we have
v v v vx x v a
a a
210 0
0 0 2
v v a x x2 2
0 02 … (1.8)
Eliminating the acceleration a in Equation (1.7), we have
v vx x v t t
t
1 200 0 2
x x v v t1
0 02 … (1.9)
Eliminating v0 in Equation (1.9), we have
x x v at t at1 2
0 2
x x vt at 20
1
2 … (1.10)
so that the equations for motion in one dimension under constant acceleration are
Equations.1.6, 1.7, 1.8, 1.9 and 1.10.
19
Problem-solving Strategy
We now use the kinematic equations to determine unknown information about an object's
motion. The process involves the use of a problem-solving strategy. The strategy includes the
following steps:
1. Construct an informative diagram of the physical situation.
2. Identify and list the given information in variable form.
3. Identify and list the unknown information in variable form.
4. Identify and list the equation which will be used to determine the unknown
information from the known variables.
5. Substitute known values into the equation and use appropriate algebraic steps to solve
for the unknown.
6. Check your answer to ensure that it is reasonable and mathematically correct.
The use of this problem-solving strategy is modelled in the example below.
Example:
Huruma approaches a traffic light in her car which is moving with a velocity of +30.0 m/s.
The light turns yellow, she applies the brakes and skids to a stop. If her acceleration is –8.00
m/s2, determine the displacement of the car during the skidding process.
Solution:
Given: v0 = +30.0 m/s, v = 0 m/s, a = –8.00 m/s2, to Find d.
Use the following kinematic equation which allows you to determine the unknown quantity.
v v a x x2 2
0 02 where d = x – x0.
Upon substitution we have
(0 m/s)2 = (30.0 m/s)2 + 2×(–8.00 m/s2) ×d
d = 56.3 m
Kinematics Problems and Solutions
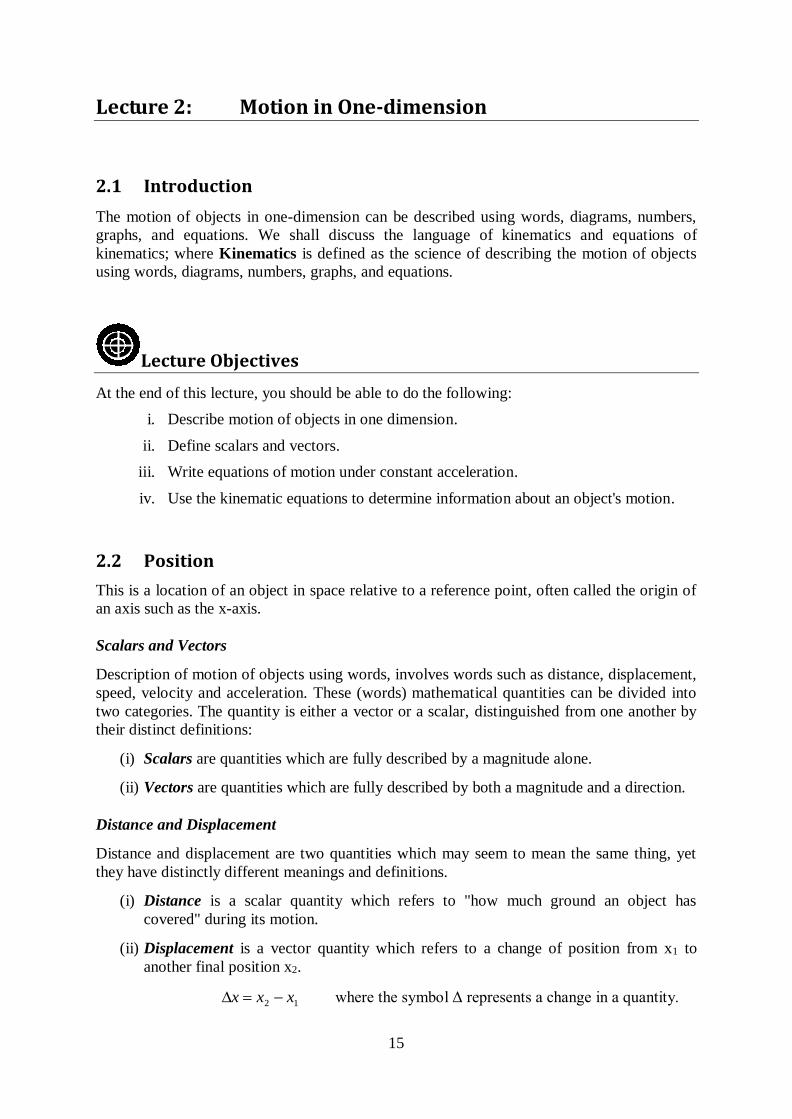
1. As you can see from the given picture, ball is thrown horizontally with an initial velocity.
Find the time of motion. (g=10m/s2)
20
Ball does projectile motion in other words it does free fall in vertical and linear motion in
horizontal. Time of motion for horizontal and vertical is same. Thus in vertical;
H = 1/2g.t2
80 = 1/2.10.t2
T = 4s
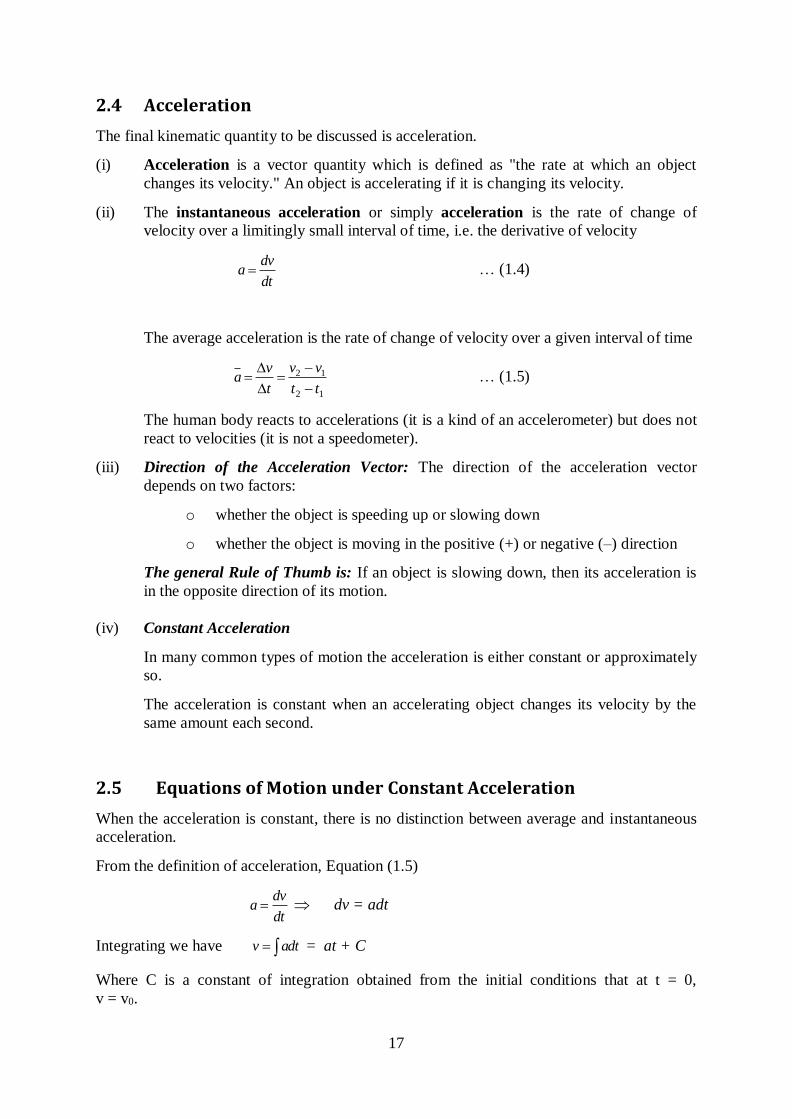
2. An object hits the ground as given in the picture below. Find the initial velocity of the
object.
Velocity of horizontal motion is constant. So;
V0 = Vx = Vcos530
Vx = V0 = 30m/s.0,6
V0 = Vx = 18m/s
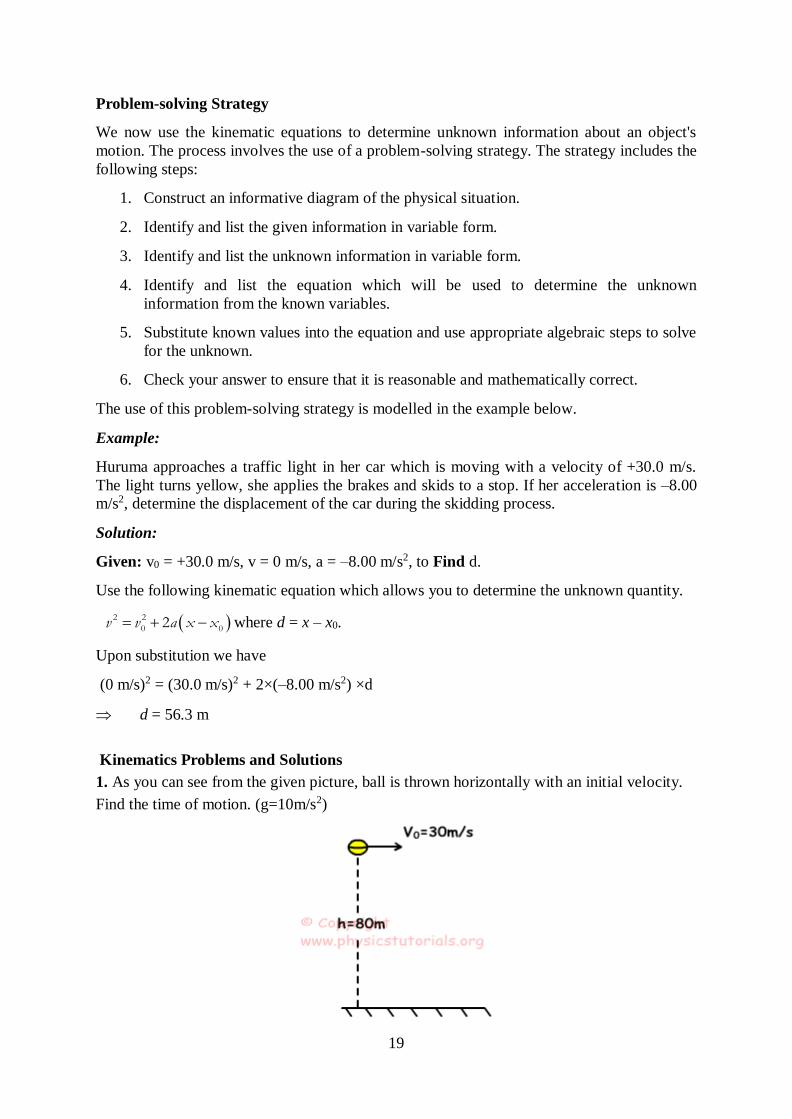
3. An object is thrown with an angle 370 with horizontal. If the initial velocity of the object is
50m/s, find the time of motion, maximum
height it can reach, and distance in horizontal.
V0x = V0cos530 = 50.0,8 = 40m/s
V0y = V0y.sin530 = 50.0,6 = 30m/s
a) V-V0y = 0 - g.t at the maximum height
t = 30/10 = 3s
2.t = time of motion = 2.3 = 6s
b) V0y2 = hmax.2.g
hmax = 302/2.10 = 45m
c) X = V0x.ttotal = 40.6 = 240m
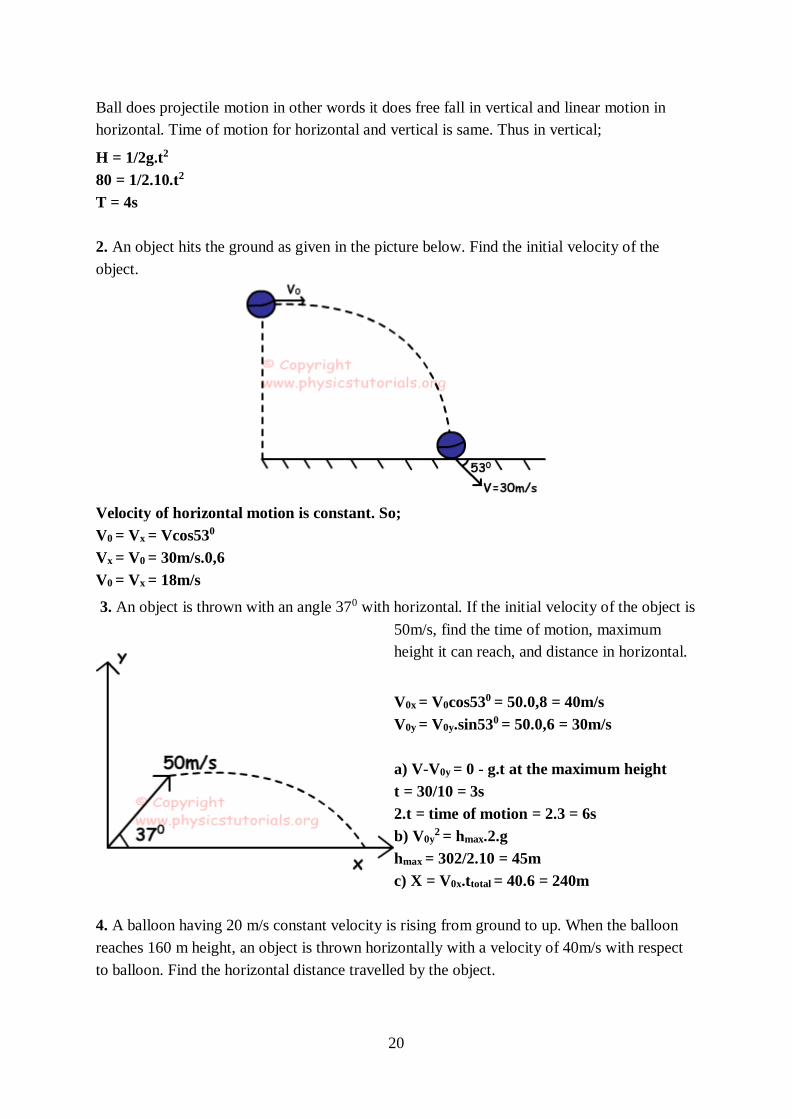
4. A balloon having 20 m/s constant velocity is rising from ground to up. When the balloon
reaches 160 m height, an object is thrown horizontally with a velocity of 40m/s with respect
to balloon. Find the horizontal distance travelled by the object.
21
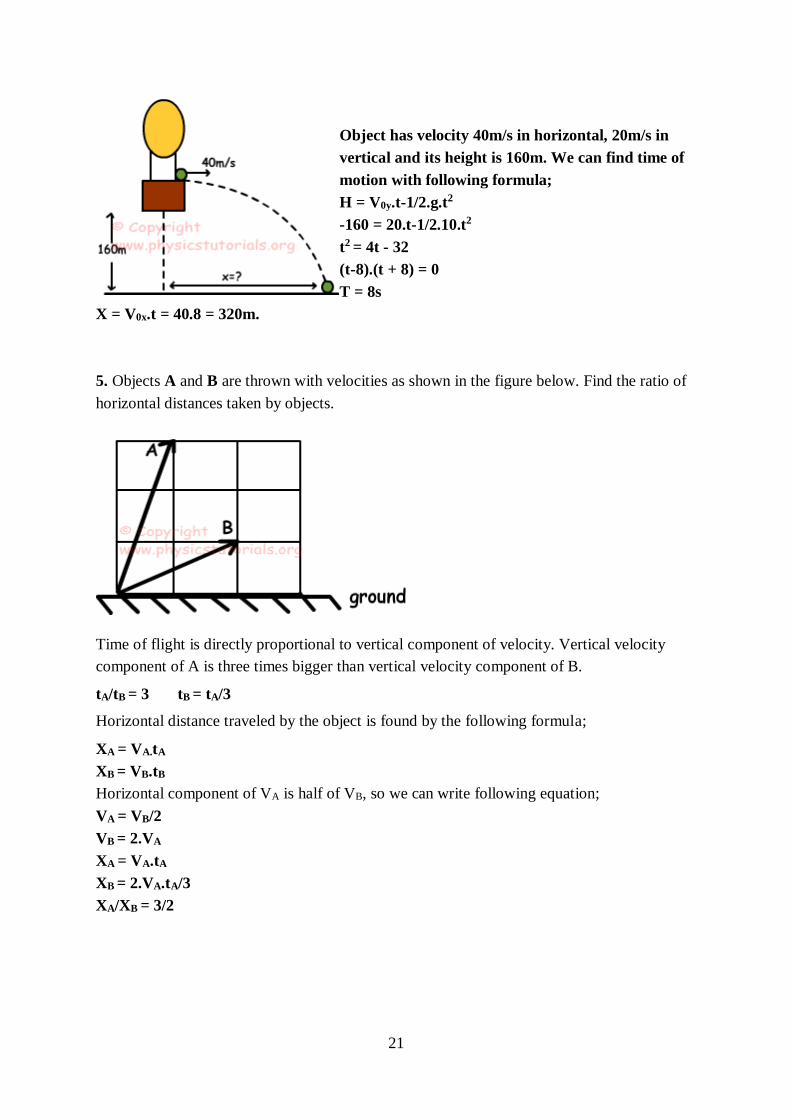
Object has velocity 40m/s in horizontal, 20m/s in
vertical and its height is 160m. We can find time of
motion with following formula;
H = V0y.t-1/2.g.t2
-160 = 20.t-1/2.10.t2
t2 = 4t - 32
(t-8).(t + 8) = 0
T = 8s
X = V0x.t = 40.8 = 320m.
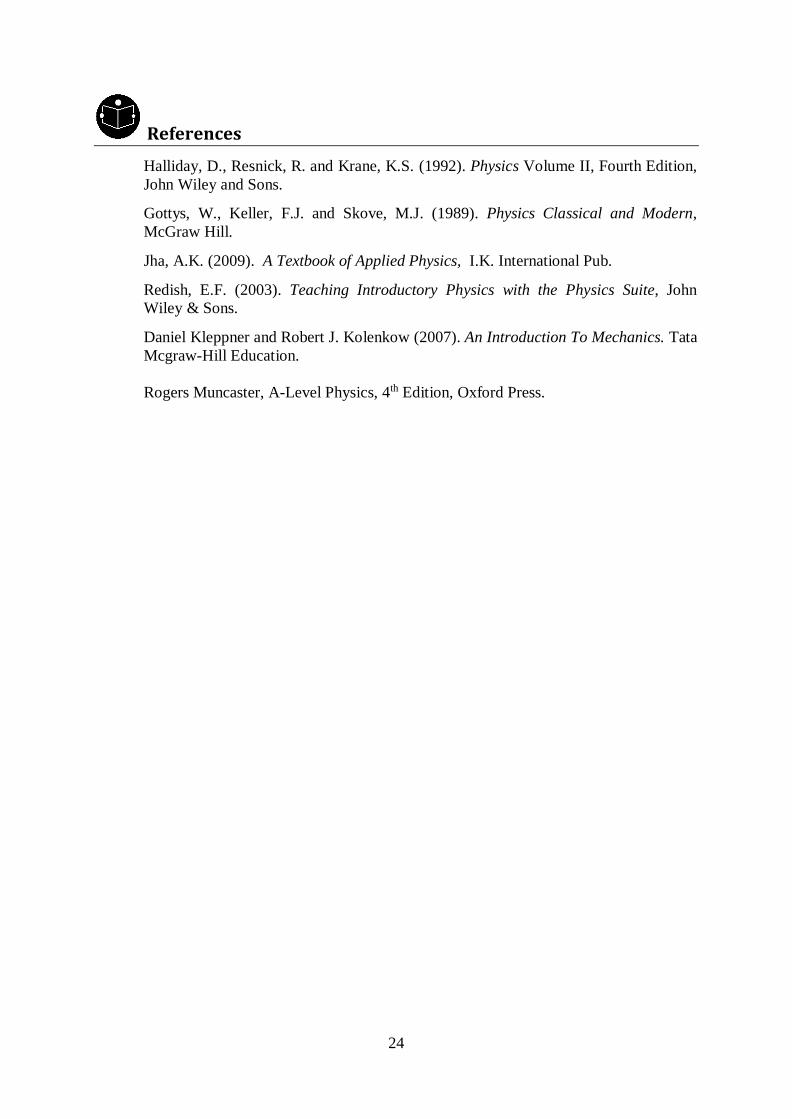
5. Objects A and B are thrown with velocities as shown in the figure below. Find the ratio of
horizontal distances taken by objects.
Time of flight is directly proportional to vertical component of velocity. Vertical velocity
component of A is three times bigger than vertical velocity component of B.
tA/tB = 3 tB = tA/3
Horizontal distance traveled by the object is found by the following formula;
XA = VA.tA
XB = VB.tB
Horizontal component of VA is half of VB, so we can write following equation;
VA = VB/2
VB = 2.VA
XA = VA.tA
XB = 2.VA.tA/3
XA/XB = 3/2

22
2.6 Kinematic Equations and Free Fall
A free-falling object is one which is falling under the sole influence of gravity. Any object
which is moving and being acted upon only by the force of gravity is said to be "in a state of
free fall." Such an object will experience a downward acceleration of 9.8 m/s/s (which is
often approximated to 10 m/s/s). Whether the object is falling downward or rising upward
towards its peak, if it is moving under the influence of gravity alone, the value of its
acceleration will be 9.8 m/s/s. Like any moving object, the motion of an object in free fall can
be described by the kinematic equations.
The application of these equations to the motion of an object in free fall can be aided by a
proper understanding of the conceptual characteristics of free-fall motion. These concepts are
as follows:
i. An object in free fall experiences an acceleration of –9.8 m/s/s. (The negative (–) sign
indicates a downward acceleration.) Whether explicitly stated or not, in the kinematic
equations the acceleration for any freely falling object is always – 9.8 m/s/s.
If an object is dropped (as opposed to being thrown) from an elevated height to the ground
below, the initial velocity of the object is 0 m/s.
If an object is projected upwards in a vertical direction, it will slow down as it rises upward.
The instant at which it reaches the peak of its trajectory, its velocity is 0 m/s. This value
can be used as one of the motion parameters in the kinematic equations; for example, the
final velocity (v) after travelling to the peak would be assigned a value of 0 m/s.
If an object is projected upwards in a vertical direction, then the velocity at which it is
projected is equal in magnitude and opposite in sign to the velocity it has when it returns
to the same height. That is, a ball projected vertically with an upward velocity of +30 m/s
will have a downward velocity of –30 m/s when it returns to that same height.
These four principles and the kinematic equations can be combined to solve problems
involving the motion of free-falling objects. The one example below illustrates the
application of free-fall principles to kinematic problem-solving. In each example, the
problem-solving strategy which was introduced earlier will be utilized.
Example: Luka drops a pile of roof tiles from the top of a roof located 8.52 meters above the
ground. Determine the time required for the tiles to reach the ground.
Solution:
Given: vi = 0.0 m/s, d = –8.52 m, a = –9.8 m/s2; To find d, use Equation (1.7).
2.7 Free-fall Acceleration
This is the acceleration due to gravity g. The value of g varies slightly with latitude and also
with altitude.
The value of g = 9.8 ms–2 applies at sea level and in the mid latitudes.
Eqs. 1.6 – 1.10 apply to free fall near the Earth’s surface, with the modifications
(i) The direction of motion is along y – axis, +ve upward;

23
(ii) The acceleration a is replaced by –g.
So that the free-fall equations of motion become:
v = v0 – gt … (1.11)
y – y = v t – gt 20 0
1
2 … (1.12)
v v g y y2 2
0 02 …. (1.13)
y y v v t0 0
1
2 .… (1.14)
y y vt gt 20
1
2 .… (1.15)
When solving problems under constant acceleration, choose the appropriate equation among
the five equations or alternatively use the pair of basic equations and solve them
simultaneously.
Exercise 1. A car travelling at a constant speed of 30 m/s passes a police car at rest. The
policeman starts to move at the moment the speeder passes his car and accelerates at a
constant rate of 3.0 m/ s 2 until he pulls even with the speeding car. Find:
(a) The time required for the policeman to catch the speeder.
(b) The distance travelled during the chase.
2. A stone is thrown vertically upward from the edge of a building 19.6 m high with
initial velocity 14.7 m/s. The stone just misses the building on the way down. Find:
(a) The time of flight and
(b) The velocity of the stone just before it hits the ground.
3. A rocket moves upward, starting from rest with an acceleration of 29.4 m/s 2 for 4 s.
At this time, it runs out of fuel and continues to move upward. How high does it go?
Summary
Kinematics is the science of describing the motion of objects using words, diagrams,
numbers, graphs, and equations. In this lecture, we have described position and motion of
objects and various kinematic quantities. We have solved equations of motion under constant
acceleration and free-fall acceleration.
24
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys, W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics, I.K. International Pub.
Redish, E.F. (2003). Teaching Introductory Physics with the Physics Suite, John
Wiley & Sons.
Daniel Kleppner and Robert J. Kolenkow (2007). An Introduction To Mechanics. Tata
Mcgraw-Hill Education.
Rogers Muncaster, A-Level Physics, 4th Edition, Oxford Press.

25
Lecture 3: Vectors
3.1 Introduction
We have already introduced vectors in the discussion of one dimensional motion. A vector
quantity is a quantity which is fully described by both magnitude and direction; it is
represented by a vector symbol: A and a scalar quantity is a quantity which is fully
described by its magnitude.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Add vectors by different methods.
ii. Describe properties of vector addition
iii. Multiply vectors by different methods
3.2 Addition of Vectors
As is in ordinary arithmetic, only vectors of the same kind can be added.
Graphical Method
This is a geometrical construction whereby the sum is the vector joining the loose ends of a
triangle or a polygon.
Figure 1.1: Graphical Method
3.3 Properties of Vector Addition
The properties of vector addition are described as follows:

26
1. Commutative law:
A B B A
In other words, the order of addition of vectors does not matter.
2. Associative Law:
A B C A B C
If there are more than two vectors, it does not matter how they are grouped as they are
added.
4. Subtraction:
A A 0
0 is the null vector. A null vector is a vector with zero magnitude and no direction.
3.4 Vectors and their Components
Addition of vectors by the graphical methods is a tedious process. Adding their components
on a rectangular coordinate system is neater.
Hence, the vectors are resolved along x and y axes and the components are added.
Ax = Acosθ; Ay = Asinθ
Bx = Bcos; By = Bsin
Figure 1.2: An Illustration of Components of Vectors
A vector is represented fully by its component.
The magnitude
2 2A A Ax y
The angle θ, tanA y
Ax
In solving problems you may use the A and θ notation or the Ax and Ay notation.

27
3.5 Unit Vectors
A unit vector is a vector of magnitude exactly one. It lacks both dimension and units. Its
purpose is to specify direction.
For the Cartesian coordinate system, the unit vectors are i , j and k pointing in the x-, y-, z-
directions, respectively.
Figure 1.3: An Illustration of Unit Vectors
The i , j and k are arranged in a right-handed screw rule, such that if a screw is rotated from
x to y it will advance in the z-direction.
So that the vectors A and B can now be expressed as:
ˆ ˆx yA A i j
ˆ ˆx yB B i B j
Note that ˆA ix and ˆA jy are called the vector components of A while xA and yA are
simply called the components of A .
3.6 Adding Vectors by Components
Adding of vectors is neater when components are combined axis by axis.
E.g. r a b
So that the components of the vector r become:
x x xr a b
y y yr a b
z z zr a b
In unit vector notation, we have
ˆˆ ˆr a b i a b j a b kx x y y z z

28
Activity 2
1. Can the speed of an object be negative? Explain.
2. Does a car’s speedometer measure velocity or speed? Explain.
3. Does a car’s odometer measure distance or displacement? Explain.
4. A car travels along a straight East-West street. We let the unit vector i
point towards the east. What is the sign of vx if the car is travelling (a)
towards the East, (b) towards the West?
3.7 Multiplying Vectors
The following discussion relates to the multiplication of vectors.
(i) Multiplication by a Scalar: Multiplying a vector a by a scalar s gives the product
p sa ; the magnitude of vector p is ‘sa’ and the direction is that of vector a .
(ii) Scalar Product: This is one of the two ways to multiply a vector by another vector to
produce a scalar quantity.
. cosa b ab
where θ is the angle between vector a and vector b . Because of the notation on the
left-hand side, .a b is called the “dot product”. The symbol “.” is an operator and not a
normal multiplication sign.
The scalar product is commutative
. . cosa b b a ab .
The commutative law applies.
When the vectors are in the unit vector notation, the dot product becomes
ˆ ˆˆˆ ˆ. .x y z x y za b a i b j b k b i b j b k
= x x y y z za b a b a b – which obeys the distributive law. All other combinations
involve cos 90 which is zero, for example, axbycos90 + axbkcos90, etc.
3.8 Vector Product
The vector product is the second way of multiplication of vectors that produces another
vector:

29
c a b or c a b Read as “ a cross b ” .
The magnitude of c is c = a b sin θ, where θ is the smaller angle between vector a and b .
You might ask, why the smaller angle, θ < 180; the reason is that for θ > 180, sin θ = – sin
(360 – θ), whereas cos θ = cos (360 – θ). Hence, whereas the vector product takes the smaller
angle, the scalar or dot product can take either angle.
The direction of c is in accordance with a right-handed screw rule which is described as
follows:
Figure 1.4: An Illustration of the Right Handed
Screw Rule
Place a and b tail-to-tail without altering their orientation. Imagine a line perpendicular to
the plane of a and b and passing at the origin, as shown in Figure 1.4. Imagine a screw is
rotated from a to b . The direction of advance of the screw is the direction of vector c
.
The vector product is not commutative so that a b b a
The distributive law for vector products is given as
ˆ ˆˆ ˆˆ ˆx y z x y za b a i a j a k b i b j b k
ˆˆ ˆ ˆ ˆˆx x x y x za i b i a i b j a i b k
ˆˆˆ ˆ ˆ ˆy x y y y za j b i a j b j a j b k
ˆ ˆ ˆ ˆˆ ˆz x z y z za k b i a k b j a k b k
= ˆ ˆ ˆˆx y x z y x y za b k a b j a b k a b i
ˆˆz x z ya b j a b i
a b = ˆˆ ˆy z z y z x x z x y y xa b a b i a b a b j a b a b k
Therefore, the distributive law holds valid for vector products.
30
Note that the vector products of the unit vectors i , j and k are cyclic.
ˆˆ ˆi j k
ˆ ˆj k i
ˆ ˆ ˆk i j
Figure 1.5: An Illustration of Cyclic Operations. The unit vector is positive in the
direction of the arrow
Kinematics Examples
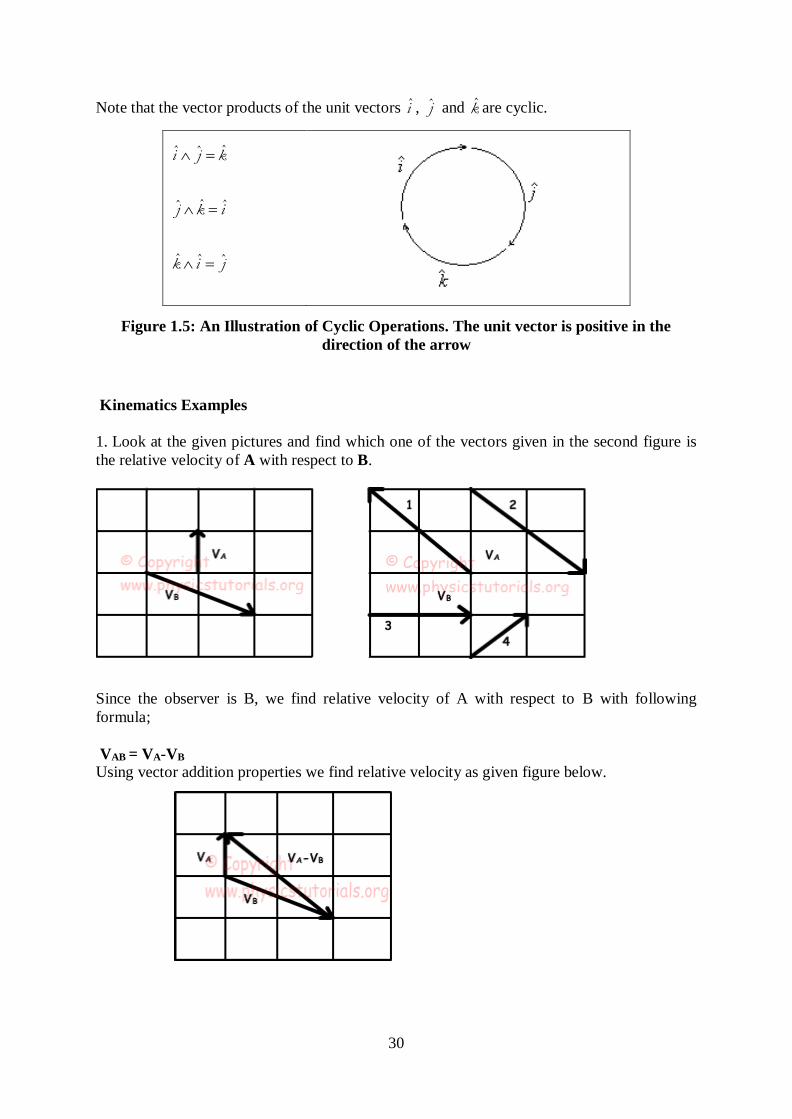
1. Look at the given pictures and find which one of the vectors given in the second figure is
the relative velocity of A with respect to B.
Since the observer is B, we find relative velocity of A with respect to B with following
formula;
VAB = VA-VB Using vector addition properties we find relative velocity as given figure below.
31
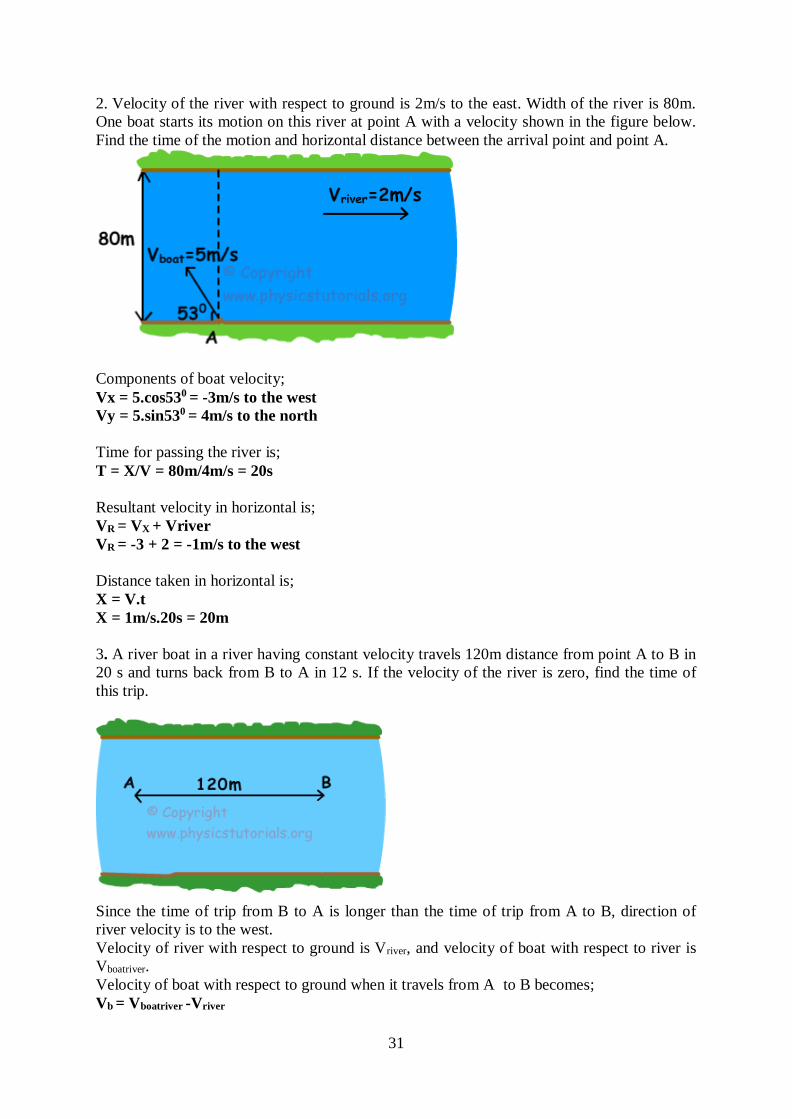
2. Velocity of the river with respect to ground is 2m/s to the east. Width of the river is 80m.
One boat starts its motion on this river at point A with a velocity shown in the figure below.
Find the time of the motion and horizontal distance between the arrival point and point A.
Components of boat velocity;
Vx = 5.cos530 = -3m/s to the west
Vy = 5.sin530 = 4m/s to the north
Time for passing the river is;
T = X/V = 80m/4m/s = 20s
Resultant velocity in horizontal is;
VR = VX + Vriver
VR = -3 + 2 = -1m/s to the west
Distance taken in horizontal is;
X = V.t
X = 1m/s.20s = 20m
3. A river boat in a river having constant velocity travels 120m distance from point A to B in
20 s and turns back from B to A in 12 s. If the velocity of the river is zero, find the time of
this trip.
Since the time of trip from B to A is longer than the time of trip from A to B, direction of
river velocity is to the west.
Velocity of river with respect to ground is Vriver, and velocity of boat with respect to river is
Vboatriver.
Velocity of boat with respect to ground when it travels from A to B becomes;
Vb = Vboatriver -Vriver
32
and when it travels from B to A;
Vb = Vboatriver + Vriver
We can find velocities using following formula;
1. Vboatriver-Vriver = 120/20 = 6m/s
and
2. Vboatriver + Vriver = 120/12 = 10m/s
Solving equations 1. and 2. we find the velocities of river and boat.
Vboatriver=8m/s and Vriver = 2m/s
If the velocity of river is zero, boat travels 240m distance in;
240 = 8m/s.t
t = 30s
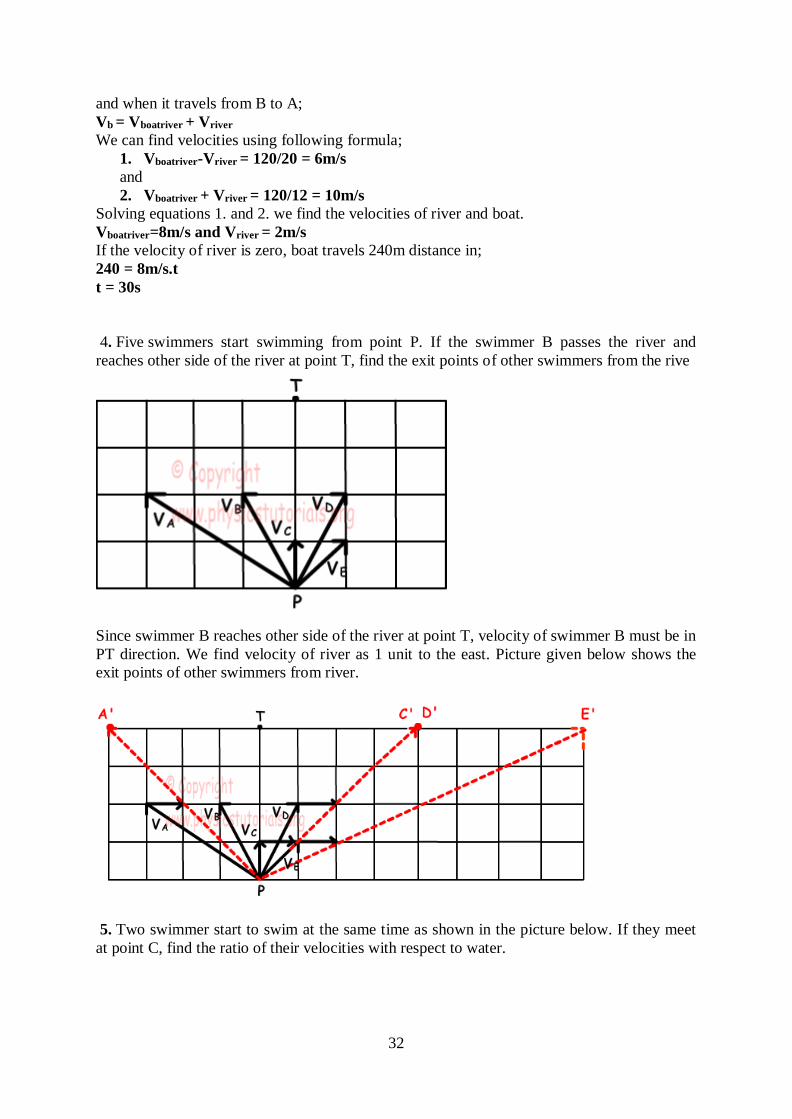
4. Five swimmers start swimming from point P. If the swimmer B passes the river and
reaches other side of the river at point T, find the exit points of other swimmers from the rive
Since swimmer B reaches other side of the river at point T, velocity of swimmer B must be in
PT direction. We find velocity of river as 1 unit to the east. Picture given below shows the
exit points of other swimmers from river.
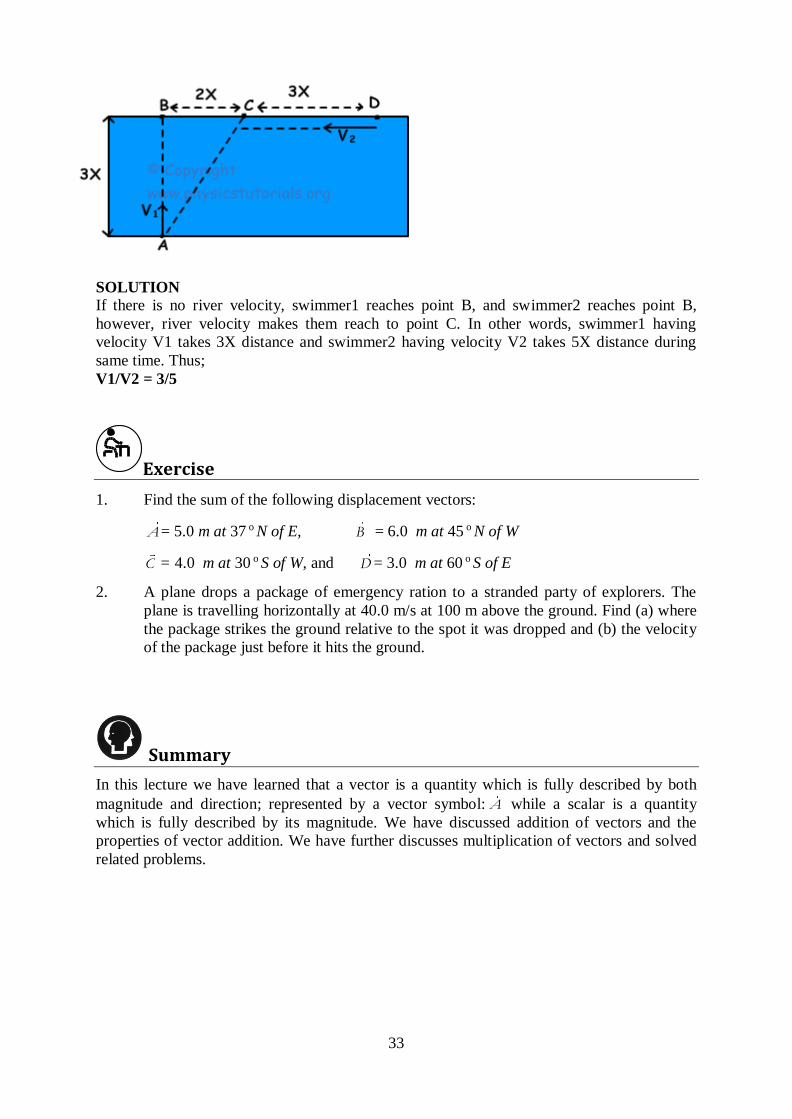
5. Two swimmer start to swim at the same time as shown in the picture below. If they meet
at point C, find the ratio of their velocities with respect to water.
33
SOLUTION
If there is no river velocity, swimmer1 reaches point B, and swimmer2 reaches point B,
however, river velocity makes them reach to point C. In other words, swimmer1 having
velocity V1 takes 3X distance and swimmer2 having velocity V2 takes 5X distance during
same time. Thus;
V1/V2 = 3/5
Exercise 1. Find the sum of the following displacement vectors:
A= 5.0 m at 37 o N of E, B = 6.0 m at 45 o N of W
C = 4.0 m at 30 o S of W, and D = 3.0 m at 60 o S of E
2. A plane drops a package of emergency ration to a stranded party of explorers. The
plane is travelling horizontally at 40.0 m/s at 100 m above the ground. Find (a) where
the package strikes the ground relative to the spot it was dropped and (b) the velocity
of the package just before it hits the ground.
Summary
In this lecture we have learned that a vector is a quantity which is fully described by both
magnitude and direction; represented by a vector symbol: A while a scalar is a quantity
which is fully described by its magnitude. We have discussed addition of vectors and the
properties of vector addition. We have further discusses multiplication of vectors and solved
related problems.
34
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys, W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics, I.K. International Pub.
Redish, E.F. (2003). Teaching Introductory Physics with the Physics Suite, John
Wiley & Sons.
Daniel Kleppner and Robert J. Kolenkow (2007). An Introduction To Mechanics. Tata
Mcgraw-Hill Education.
Rogers Muncaster, A-Level Physics, 4th Edition, Oxford Press.
35
Lecture 4: Newton’s Laws of Motion
4.1 Introduction
A force is a ‘pull’ or ‘push’ upon an object resulting from the object’s interaction with
another object. Forces only exist as a result of an interaction.
All forces (interactions) between objects can be placed into two broad categories:
(i) Contact forces
(ii) Forces resulting from action at a distance.
Contact forces include frictional, tensional, normal, air resistance, applied and spring forces.
Forces resulting from action at a distance include gravitational and electromagnetic forces.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. State the Newton’s Laws of Motion.
ii. Describe everyday experiences related to Newton’s Laws of Motion.
iii. Perform calculations related to Newton’s Laws of Motion.
4.2 Newton’s First Law
Consider a body on which no net force acts. If the body is at rest it will remain at rest. If the
body is moving with constant velocity, it will continue to do so.
Statement
An object at rest tends to stay at rest and an object in motion tends to stay in motion with the
same speed and in the same direction unless acted upon by an unbalanced external force.
Newton’s 1st law is also called the Law of Inertia. Inertia is the tendency of an object to resist
change in its state of motion.
Everyday Experience of Newton’s First Law
The idea expressed by Newton's law of inertia should not be surprising to us. We experience
this phenomenon of inertia nearly everyday when travelling in a motor vehicle.
For example, imagine that you are a passenger in a car stopped at a traffic light. The light
turns green and the driver steps on the accelerator. The car begins to accelerate forward, yet
relative to the seat which you are on, your body begins to lean backwards. Your body being at
36
rest tends to stay at rest. This is one aspect of the law of inertia – “objects at rest tend to stay
at rest." As the wheels of the car spin to generate a forward force upon the car to cause a
forward acceleration, your body tends to stay in place. It certainly might seem to you as
though your body were experiencing a backwards force causing it to accelerate backwards;
yet you would have a difficult time identifying such a backwards force on your body. There
isn't one. The feeling of being thrown backwards is merely the tendency of your body to resist
the acceleration and to remain in its state of rest. The car is accelerating out from under your
body, leaving you with the false feeling of being thrown backwards.
Now imagine that you're driving along at constant speed and then suddenly approach a stop
sign. The driver steps on the brakes. The wheels of the car lock and begin to skid across the
pavement. This causes a backwards force upon the forward moving car and subsequently a
backwards acceleration on the car. However, your body being in motion tends to continue in
motion while the car is slowing to a stop. It certainly might seem to you as though your body
were experiencing a forward force causing it to accelerate forwards; yet you would once more
have a difficult time identifying such a forward force on your body.
The feeling of being thrown forward is merely the tendency of your body to resist the
deceleration and to remain in its state of forward motion. The unbalanced force acting upon
the car causes it to slow down while your body continues in its forward motion.
4.3 Newton’s Second Law
Newton's first law of motion predicts the behaviour of objects for which all existing forces
are balanced. An object will only accelerate if there is a net or an unbalanced force acting
upon it. The presence of an unbalanced force will accelerate an object – changing either its
speed, direction, or both. Newton's second law of motion can be formally stated as follows:
The acceleration of an object as produced by a net force is directly proportional to the
magnitude of the net force, in the same direction as the net force, and inversely proportional
to the mass of the object.
The vector sum or the net force of all forces that act on a body is given by
F ma …(1.16)
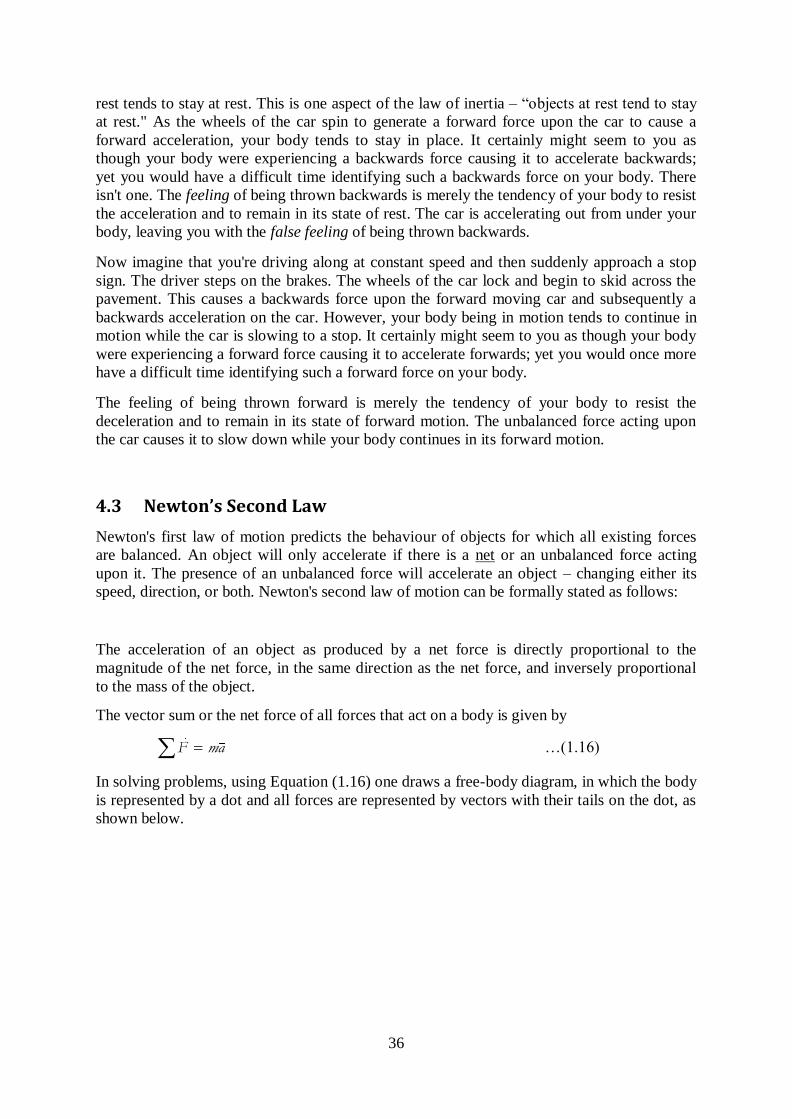
In solving problems, using Equation (1.16) one draws a free-body diagram, in which the body
is represented by a dot and all forces are represented by vectors with their tails on the dot, as
shown below.
37
Figure 1.6: An Illustration of Free Body Diagrams for (a) A Book at Rest on a Table; (b)
An Object Falling Freely, Air Resistance Neglected; (c) A Book on a Table being Pushed
or Pulled to the Right; and (d) A Car Decelerating to a Halt.
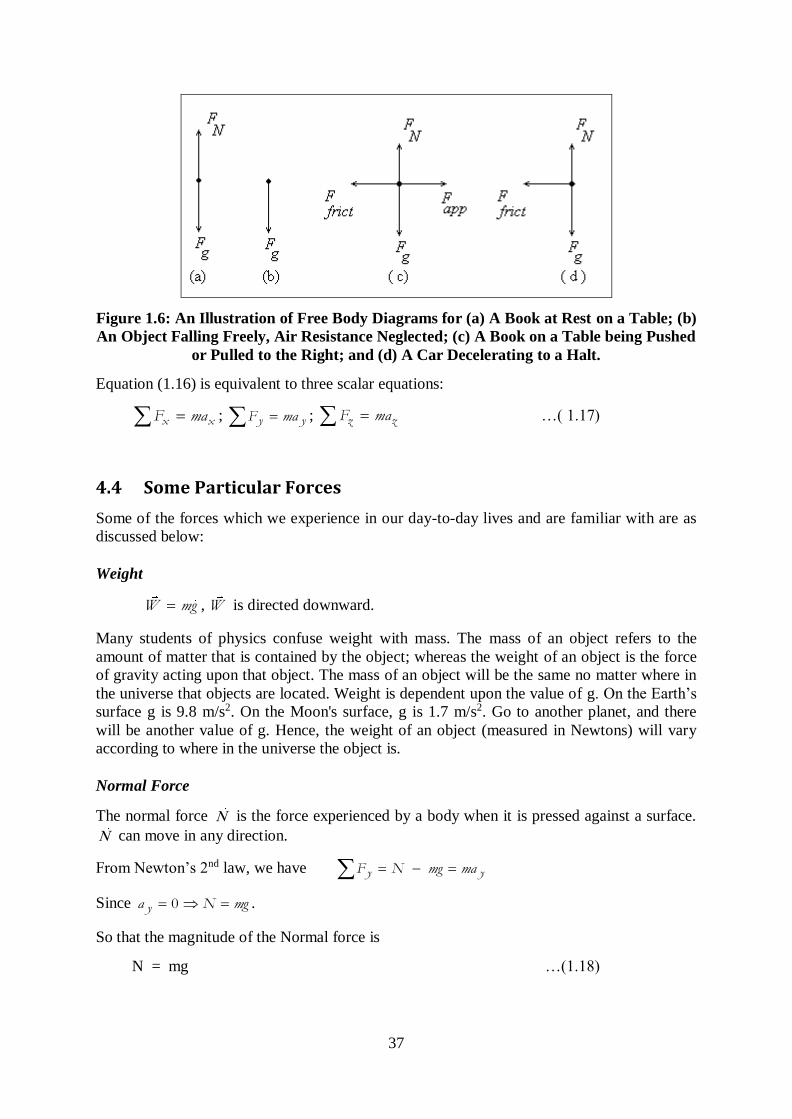
Equation (1.16) is equivalent to three scalar equations:
x xF ma ; y yF ma ; z zF ma …( 1.17)
4.4 Some Particular Forces
Some of the forces which we experience in our day-to-day lives and are familiar with are as
discussed below:
Weight
W mg , W is directed downward.
Many students of physics confuse weight with mass. The mass of an object refers to the
amount of matter that is contained by the object; whereas the weight of an object is the force
of gravity acting upon that object. The mass of an object will be the same no matter where in
the universe that objects are located. Weight is dependent upon the value of g. On the Earth’s
surface g is 9.8 m/s2. On the Moon's surface, g is 1.7 m/s2. Go to another planet, and there
will be another value of g. Hence, the weight of an object (measured in Newtons) will vary
according to where in the universe the object is.
Normal Force
The normal force is the force experienced by a body when it is pressed against a surface.
can move in any direction.
From Newton’s 2nd law, we have y yF N mg ma
Since 0ya N mg .
So that the magnitude of the Normal force is
N = mg …(1.18)
38
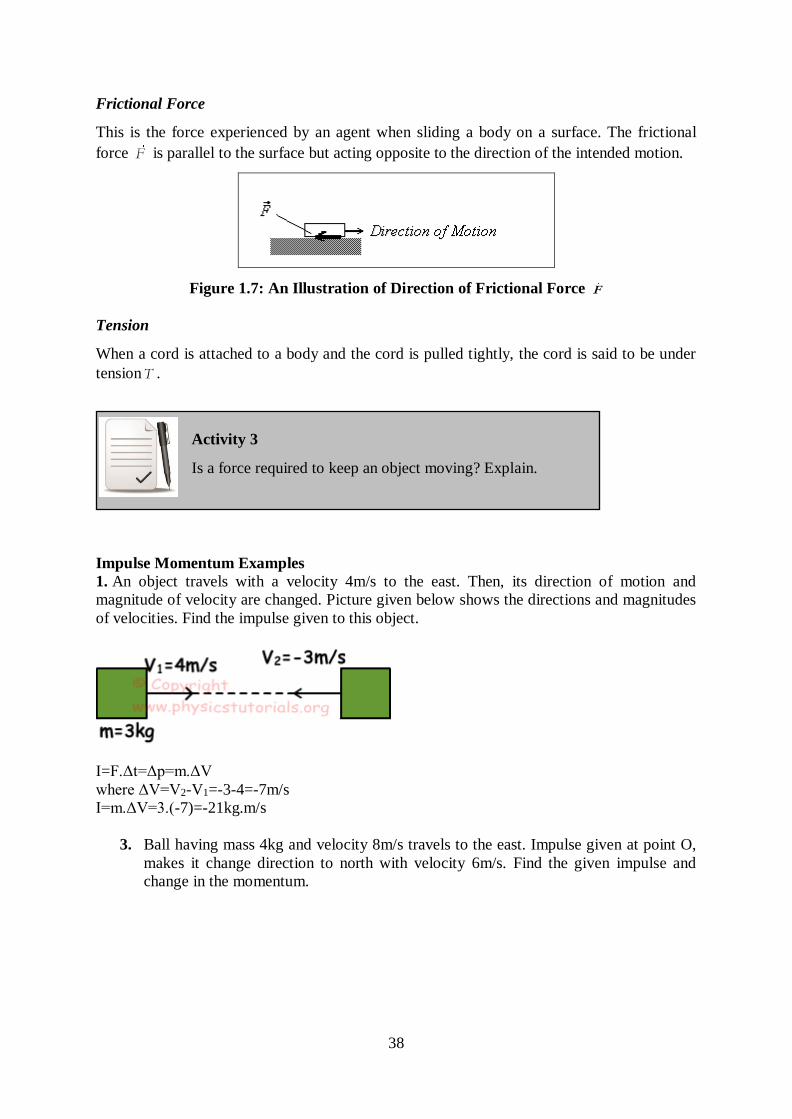
Frictional Force
This is the force experienced by an agent when sliding a body on a surface. The frictional
force F is parallel to the surface but acting opposite to the direction of the intended motion.
Figure 1.7: An Illustration of Direction of Frictional Force F
Tension
When a cord is attached to a body and the cord is pulled tightly, the cord is said to be under
tensionT .
Activity 3
Is a force required to keep an object moving? Explain.
Impulse Momentum Examples
1. An object travels with a velocity 4m/s to the east. Then, its direction of motion and
magnitude of velocity are changed. Picture given below shows the directions and magnitudes
of velocities. Find the impulse given to this object.
I=F.Δt=Δp=m.ΔV
where ΔV=V2-V1=-3-4=-7m/s
I=m.ΔV=3.(-7)=-21kg.m/s
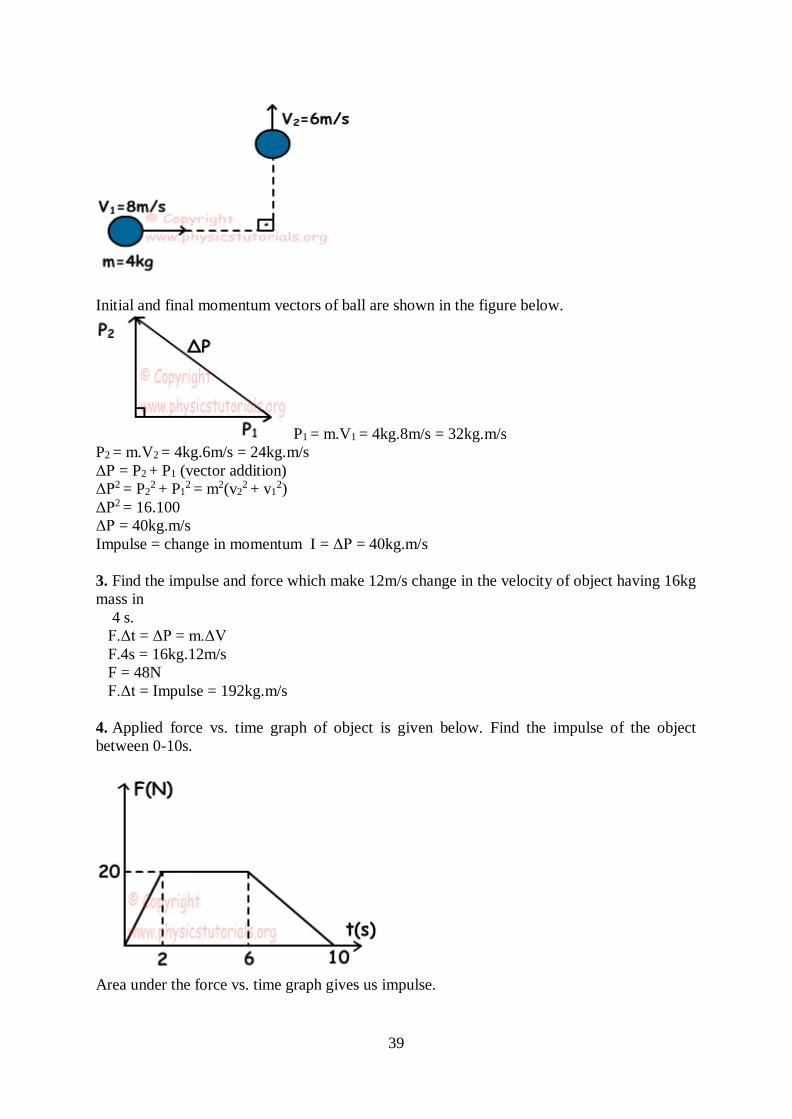
3. Ball having mass 4kg and velocity 8m/s travels to the east. Impulse given at point O,
makes it change direction to north with velocity 6m/s. Find the given impulse and
change in the momentum.
39
Initial and final momentum vectors of ball are shown in the figure below.
P1 = m.V1 = 4kg.8m/s = 32kg.m/s
P2 = m.V2 = 4kg.6m/s = 24kg.m/s
ΔP = P2 + P1 (vector addition)
ΔP2 = P22 + P1
2 = m2(v22 + v1
2)
ΔP2 = 16.100
ΔP = 40kg.m/s
Impulse = change in momentum I = ΔP = 40kg.m/s
3. Find the impulse and force which make 12m/s change in the velocity of object having 16kg
mass in
4 s.
F.Δt = ΔP = m.ΔV
F.4s = 16kg.12m/s
F = 48N
F.Δt = Impulse = 192kg.m/s
4. Applied force vs. time graph of object is given below. Find the impulse of the object
between 0-10s.
Area under the force vs. time graph gives us impulse.
40
F.Δt = 20.2/2+20.(6-2)+20.(10-6)/2
F.Δt = 140kg.m/s
5. A ball having mass 500g hits wall with a10m/s velocity. Wall applies 4000 N force to the
ball and it turns back with 8m/s velocity. Find the time of ball-wall contact.
F.Δt = ΔP = m.ΔV = m.(V2-V1)
-4000.Δt = 0,5kg.(8-10)
Δt = 0,00025s
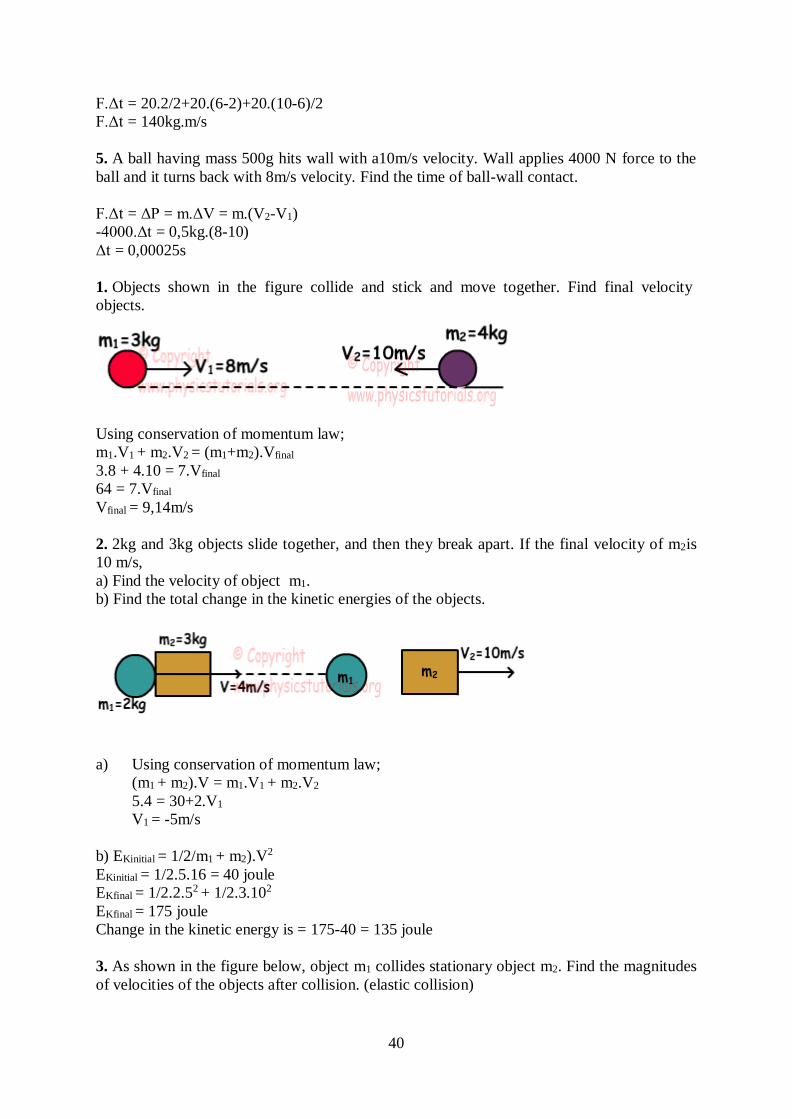
1. Objects shown in the figure collide and stick and move together. Find final velocity
objects.
Using conservation of momentum law;
m1.V1 + m2.V2 = (m1+m2).Vfinal
3.8 + 4.10 = 7.Vfinal
64 = 7.Vfinal
Vfinal = 9,14m/s
2. 2kg and 3kg objects slide together, and then they break apart. If the final velocity of m2is
10 m/s,
a) Find the velocity of object m1.
b) Find the total change in the kinetic energies of the objects.
a) Using conservation of momentum law;
(m1 + m2).V = m1.V1 + m2.V2
5.4 = 30+2.V1
V1 = -5m/s
b) EKinitial = 1/2/m1 + m2).V2
EKinitial = 1/2.5.16 = 40 joule
EKfinal = 1/2.2.52 + 1/2.3.102
EKfinal = 175 joule
Change in the kinetic energy is = 175-40 = 135 joule
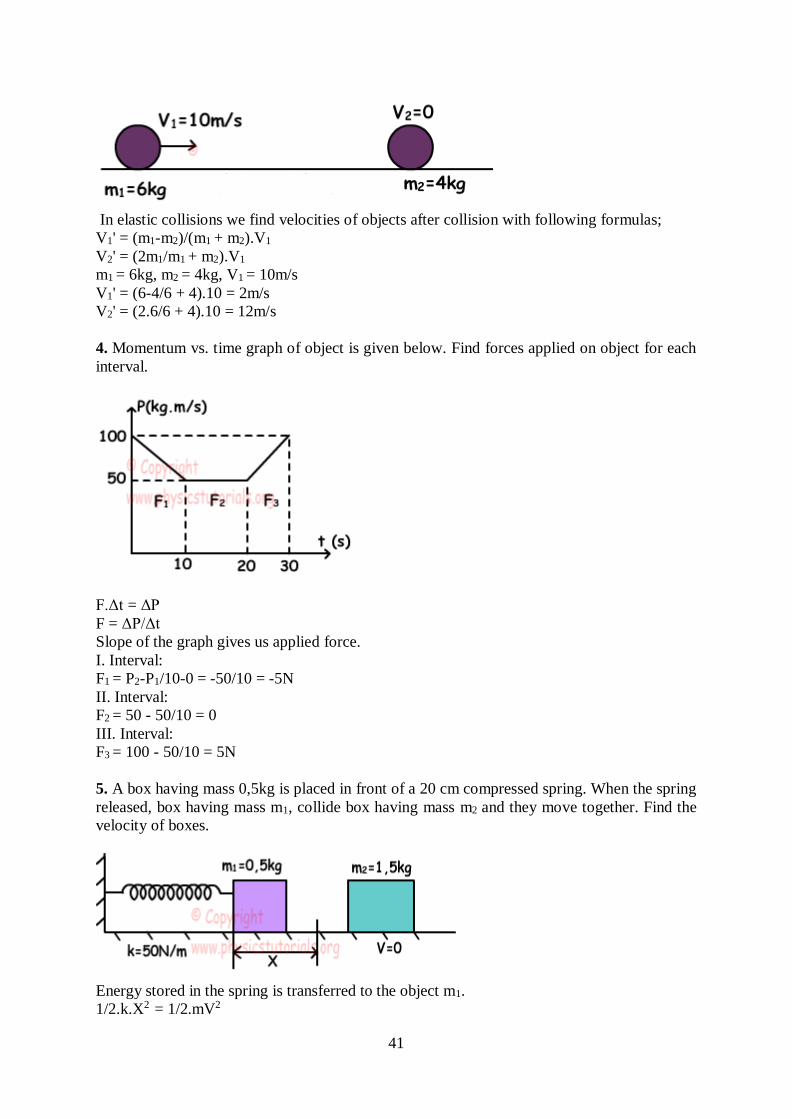
3. As shown in the figure below, object m1 collides stationary object m2. Find the magnitudes
of velocities of the objects after collision. (elastic collision)
41
In elastic collisions we find velocities of objects after collision with following formulas;
V1' = (m1-m2)/(m1 + m2).V1
V2' = (2m1/m1 + m2).V1
m1 = 6kg, m2 = 4kg, V1 = 10m/s
V1' = (6-4/6 + 4).10 = 2m/s
V2' = (2.6/6 + 4).10 = 12m/s
4. Momentum vs. time graph of object is given below. Find forces applied on object for each
interval.
F.Δt = ΔP
F = ΔP/Δt
Slope of the graph gives us applied force.
I. Interval:
F1 = P2-P1/10-0 = -50/10 = -5N
II. Interval:
F2 = 50 - 50/10 = 0
III. Interval:
F3 = 100 - 50/10 = 5N
5. A box having mass 0,5kg is placed in front of a 20 cm compressed spring. When the spring
released, box having mass m1, collide box having mass m2 and they move together. Find the
velocity of boxes.
Energy stored in the spring is transferred to the object m1.
1/2.k.X2 = 1/2.mV2
42
50N/m.(0,2)2 = 0,5.V2
V = 2m/s
Two object do inelastic collision.
m1.V1 = (m1 + m2).Vfinal
0,5.2 = 2.Vfinal
Vfinal = 0,5m/s
Exercise 1. A box of mass 5.0 kg is pulled vertically upwards by a force of 68 N applied to a rope
attached to the box. Find (a) the acceleration of the box and (b) the vertical velocity of
the box after 2 seconds.
2. A wooden plank is raised at one end to an angle of 30o. A 2.0 kg box is placed on the
incline 1.0 m from the lower end and given a slight tap to overcome static friction.
The coefficient of kinetic friction between the box and the plank is 0.20k . Find:
(a) The acceleration of the box
(b) The speed of the box at the bottom. Assume that the initial speed of the box is
zero.
Summary
In this lecture we have discussed the Newton's laws of motion, which are three physical laws
that, together, laid the foundation for classical mechanics. They describe the relationship
between a body and the forces acting upon it. The contact forces include frictional, tensional,
normal, air resistance, applied and spring forces; while forces resulting from action at a
distance include gravitational and electromagnetic forces. We have described some everyday
experiences related to the laws and solved some practical problems.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern.
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics. I.K. International Pub.

43
E.F. Redish, (2003). Teaching Introductory Physics with the Physics Suite. John
Wiley & Sons.
Daniel Kleppner and Kolenkow, Robert J. (2007). An Introduction To Mechanics.
Tata Mcgraw-Hill Education.
Rogers Muncaster, A-Level Physics, 4th Edition. Oxford Press.
44
Lecture 5: Action and Reaction Forces
5.1 Introduction
Forces come in pairs. If you lean against a brick wall, the wall pushes back on you.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Apply the Newton’s Third Law of Motion.
ii. Define friction.
iii. State the friction law.
iv. Describe the properties of friction.
5.2 Newton’s Third Law
Statement: To every action there is an equal but opposite reaction.
If a body A exerts a force BAF
on body B, it experiences a force ABF
exerted by body B on A.
BA ABF F …(1.19)
Note that the two forces do not cancel because one acts on A and the other on B.
The forces BAF
and ABF
are also called an action–reaction pair.
In applying Newton’s laws to solve problems one should be able to translate a sketch of a
situation into a free-body diagram, with appropriate axes.
5.3 Friction
There are two types of frictional forces, static frictional force sf and kinetic frictional force
kf .
sf operates against the applied force up to break away point beyond which motion starts and
kf takes over.
Definition: The friction law states that the sliding friction force is proportional to the
perpendicular reaction of the bearing surface and opposite to the body's movement direction.
The coefficient of friction, μ, depends solely upon the properties of the materials rubbing. The

45
rest friction force appears whenever there is a force acting upon the resting body, and it is of
equal magnitude and opposite direction. When the maximum rest friction force is exceeded,
sliding begins.
Explanation
This means that whenever you apply a small force to a body resting on a rough plane, the rest
friction force will be annihilating the former (according to the Third Newton's Law). For
example, if you are trying to push forward a box that is too heavy, the rest friction will be
holding it at the initial position motionless. But as long as you increase your force so that it
will exceed the maximum rest friction, the box will start moving away from the spot. The
maximum rest friction force is usually a bit bigger in magnitude than the sliding friction
force. This is why it is always a little harder to make a resting box move than to keep it
moving.
Applications:
A car's engine makes its wheels move and each part of the wheel that touches the ground
moves in the opposite direction. This causes the friction force from the road surface to appear
and act to the direction of the car's movement. Thus it appears that the acting force in the car
movement is the friction between the wheels and the ground.
Question
The sliding coefficient of friction between the car wheels and the road is μ =.5. What is the
largest acceleration that the car may achieve moving straight on a horizontal road? Presume
that the engine power [and mass are equally distributed to all four tires].
Solution: As it has already been explained, the acting force F that moves the car is the
friction between the wheels and the road. Let a be the acceleration, so according to the
Second Newton's Law, F = m*a where m is the mass of the car. It can be seen that the
acceleration will reach its maximum when the force F will do the same, and it will happen
when the wheels will start sliding. In this case the friction force will be F= μ*N, where N is
the perpendicular reaction force of the road; as the car does not move vertically, it equals the
car's weight, m*g (g is the free fall acceleration, it is almost 10 m/s/s).
So we get F = μ*m*g and F = m*a, that means μ*m*g = m*a and a = μ*g.
In our case the maximum acceleration possible will be (.5)*10 = 5 m/s/s.
[If power is delivered to one tire bearing one quarter the weight of the car, then maximum
acceleration will be:
F = μ*(0.25)*m*g and F = m*a, that means μ*(0.25)*m*g = m*a and a = μ*g/4
So the maximum acceleration would be (.5)*(10)/4 = 1.25 m/s/s)
This explains the advantage of a well balanced 4-wheel drive vehicle.]
We see that the acceleration depends on the coefficient of friction [and weight and power
distribution], no matter how strong the engine is. [The coefficient of friction of rubber on wet
ice may be as low as .05.] That is why a car can hardly [accelerate] on slippery ice.

46
5.4 Properties of Friction
When a body is pressed against a surface (dry and unlubricated) and a force F attempts to
move it along the surface, it results into a friction. The resulting frictional force has three
properties.
1. If the body does not move, then the static frictional force sf and the component of F
that is parallel to the surface are equal in magnitude and sf is directly opposite to that
component of F .
2. The magnitude sf has a maximum value
, max,s sf N … (1.20)
where µs is the coefficient of static friction and N the magnitude of the normal force.
When the component of F that is parallel to the surface exceeds , max,sf the body
begins to slide.
4. When the body begins to slide the magnitude of the frictional force rapidly decreases
to a value kf given by
k kf N … (1.21)
where µk is the coefficient of kinetic friction.
Note that Equations 1.20 and 1.21 are scalar; ,s kf are parallel to the surface whereas is
perpendicular to the surface.
The coefficients s and k are dimensionless.
Friction Force with Examples
Friction Force:
Friction force results from the interactions of surfaces. Irregularities in the structure of the
matters causes friction force. These irregularities can be detected in micro dimensions. You
may not see any irregularity on the surface of the material however, it does exist. Friction
force is always opposite to the direction of motion and tends to decrease net force. All
materials have their own friction constant in other words friction force depends on the type of
materials. Another factor affecting friction force is the normal force. When you apply a force
to an object, then friction force becomes active and resists with the force of having opposite
direction to your net force.

47
We can calculate the friction force by this formula;
Where, µ is the coefficient of friction and it depends on the type of material. Fnorm is
the reaction of the surface to the object because of its weight.
Ffrictio n ≤ µ.m.g We assume that weight as m.g, however if the object is on an
inclined plane than we take the vertical component of the mass while calculating
weight.
Friction can be studied under two topics static friction and sliding friction. Surfaces
apply different friction constant when the object is at rest and sliding. Interestingly,
the friction constant of the objects at rest is higher than the friction constant of the
sliding objects. The sliding friction force is calculated by using the µ and
the Fnorm normal force that surface apply to the object.
Ffriction = µsliding.m.g sliding
Friction force also exists when there is no motion. If two objects are in contact then we can
talk about friction force there is no need for motion. In static friction force, two objects are
in contact however there is no motion in other words object does not slide on the surface.
You all experience the static friction in daily life. For example, suppose that you push a huge
box, which is on the carpet, however, box does not move. Static friction becomes exist when
you apply a force to the object. The amount of the static friction is equal to the amount hat
you apply and the direction is opposite to the direction of the motion. If you increase the
applied force until one point static friction also increases. We will calculate this limit point
by the formula given below.
Ffriction? µstatic.m.g static
We use ≤ symbol instead of =, because static friction changes with respect to the applied
force. It has the value of 1 to the limit value. We calculate the limit value by the formula
given above. Most of the time magnitude of static friction is greater than magnitude of
sliding friction for same surfaces. We solve some problems related to the friction and
Newton’s law of motions.
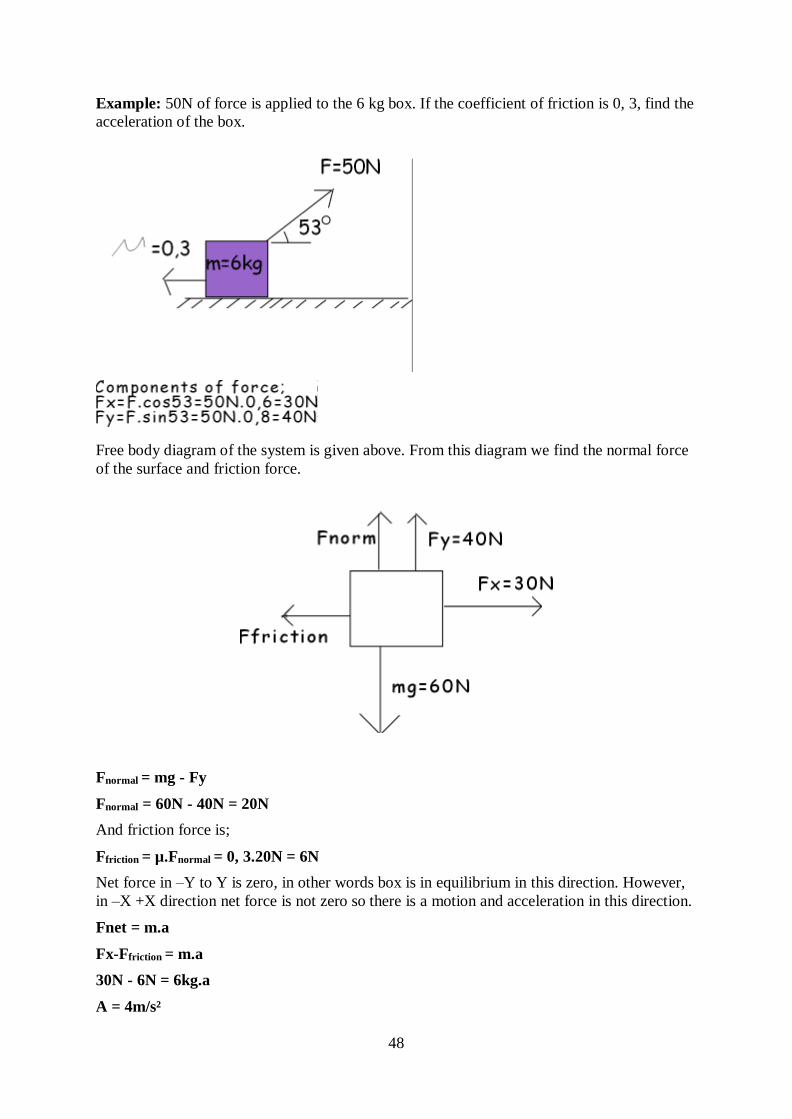
48
Example: 50N of force is applied to the 6 kg box. If the coefficient of friction is 0, 3, find the
acceleration of the box.
Free body diagram of the system is given above. From this diagram we find the normal force
of the surface and friction force.
Fnormal = mg - Fy
Fnormal = 60N - 40N = 20N
And friction force is;
Ffriction = µ.Fnormal = 0, 3.20N = 6N
Net force in –Y to Y is zero, in other words box is in equilibrium in this direction. However,
in –X +X direction net force is not zero so there is a motion and acceleration in this direction.
Fnet = m.a
Fx-Ffriction = m.a
30N - 6N = 6kg.a
A = 4m/s²
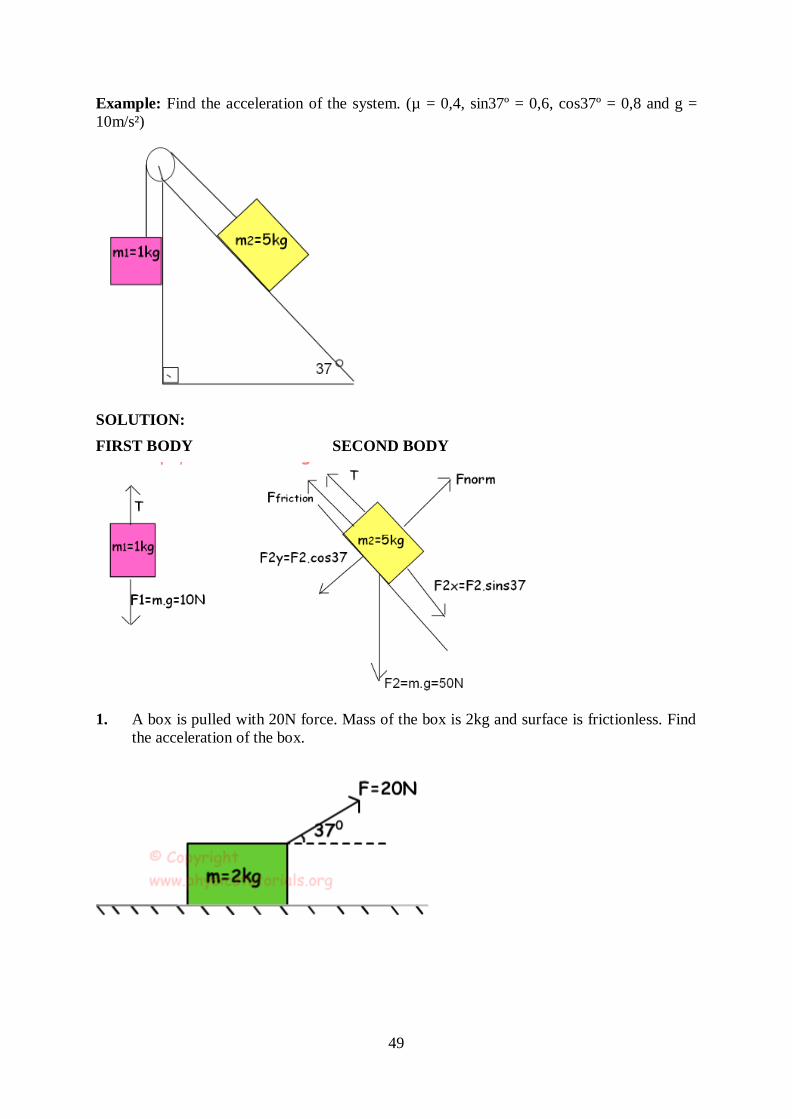
49
Example: Find the acceleration of the system. (µ = 0,4, sin37º = 0,6, cos37º = 0,8 and g =
10m/s²)
SOLUTION:
FIRST BODY SECOND BODY
1. A box is pulled with 20N force. Mass of the box is 2kg and surface is frictionless. Find
the acceleration of the box.
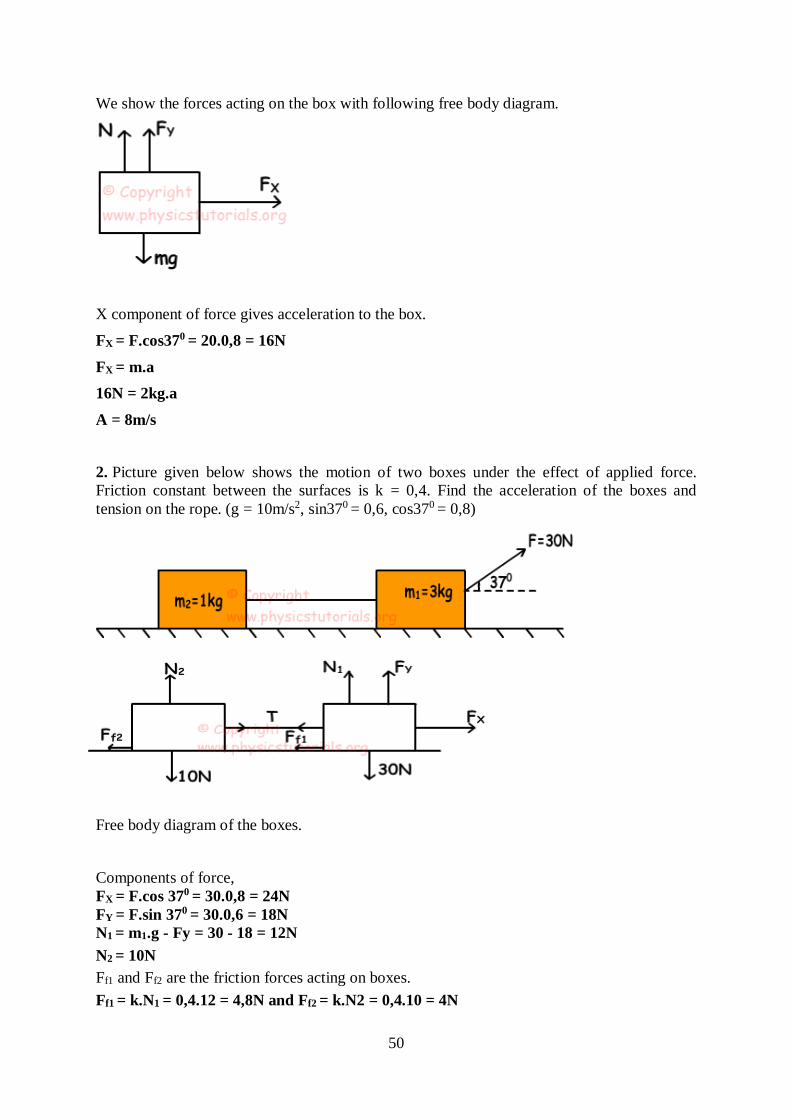
50
We show the forces acting on the box with following free body diagram.
X component of force gives acceleration to the box.
FX = F.cos370 = 20.0,8 = 16N
FX = m.a
16N = 2kg.a
A = 8m/s
2. Picture given below shows the motion of two boxes under the effect of applied force.
Friction constant between the surfaces is k = 0,4. Find the acceleration of the boxes and
tension on the rope. (g = 10m/s2, sin370 = 0,6, cos370 = 0,8)
Free body diagram of the boxes.
Components of force,
FX = F.cos 370 = 30.0,8 = 24N
FY = F.sin 370 = 30.0,6 = 18N
N1 = m1.g - Fy = 30 - 18 = 12N
N2 = 10N
Ff1 and Ff2 are the friction forces acting on boxes.
Ff1 = k.N1 = 0,4.12 = 4,8N and Ff2 = k.N2 = 0,4.10 = 4N
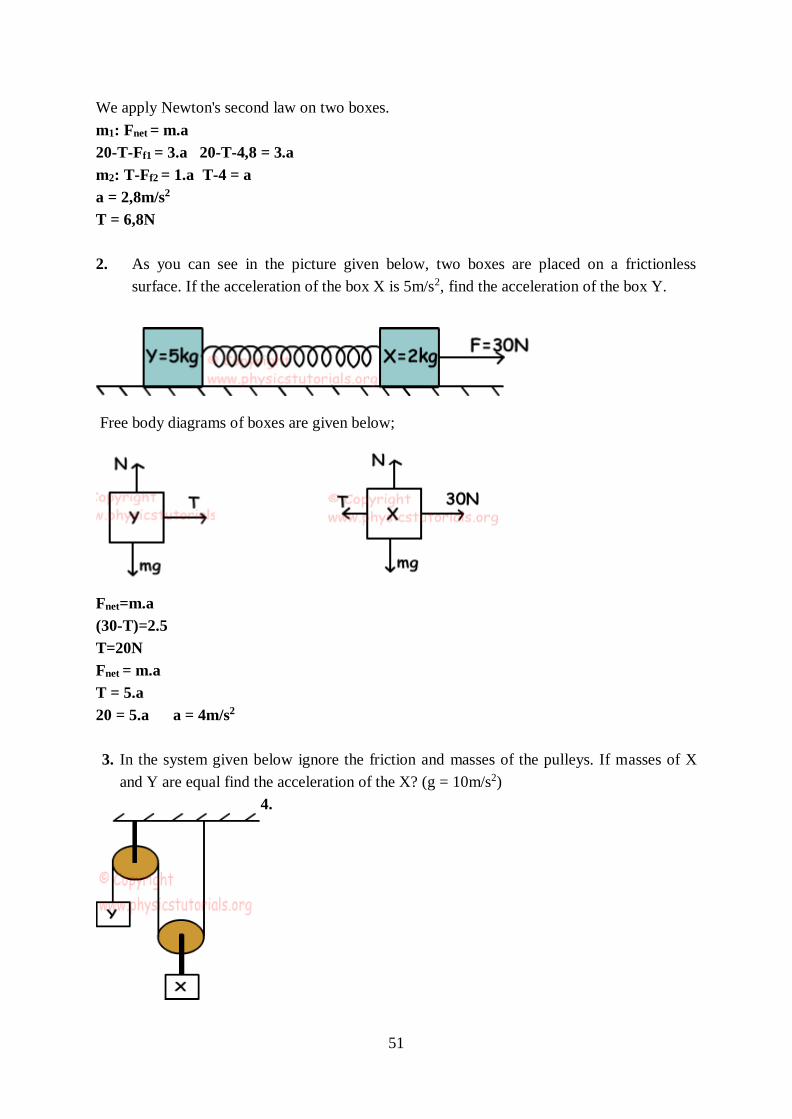
51
We apply Newton's second law on two boxes.
m1: Fnet = m.a
20-T-Ff1 = 3.a 20-T-4,8 = 3.a
m2: T-Ff2 = 1.a T-4 = a
a = 2,8m/s2
T = 6,8N
2. As you can see in the picture given below, two boxes are placed on a frictionless
surface. If the acceleration of the box X is 5m/s2, find the acceleration of the box Y.
Free body diagrams of boxes are given below;
Fnet=m.a
(30-T)=2.5
T=20N
Fnet = m.a
T = 5.a
20 = 5.a a = 4m/s2
3. In the system given below ignore the friction and masses of the pulleys. If masses of X
and Y are equal find the acceleration of the X? (g = 10m/s2)
4.
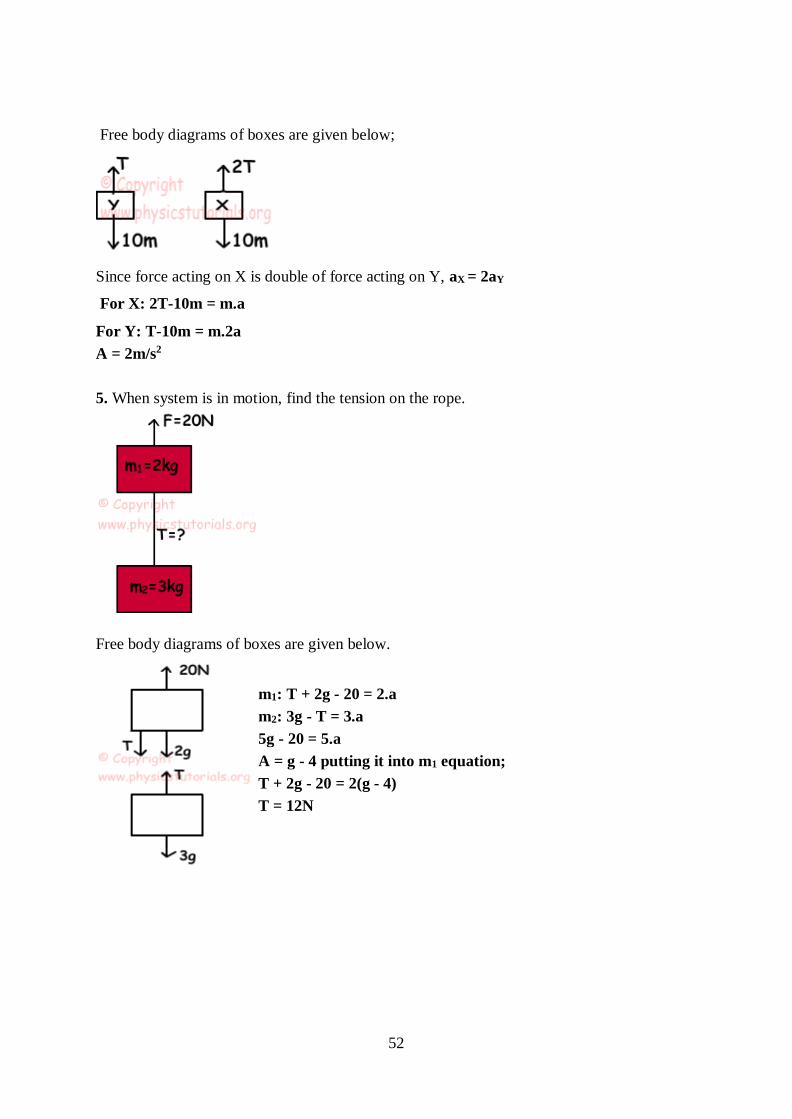
52
Free body diagrams of boxes are given below;
Since force acting on X is double of force acting on Y, aX = 2aY
For X: 2T-10m = m.a
For Y: T-10m = m.2a
A = 2m/s2
5. When system is in motion, find the tension on the rope.
Free body diagrams of boxes are given below.
m1: T + 2g - 20 = 2.a
m2: 3g - T = 3.a
5g - 20 = 5.a
A = g - 4 putting it into m1 equation;
T + 2g - 20 = 2(g - 4)
T = 12N
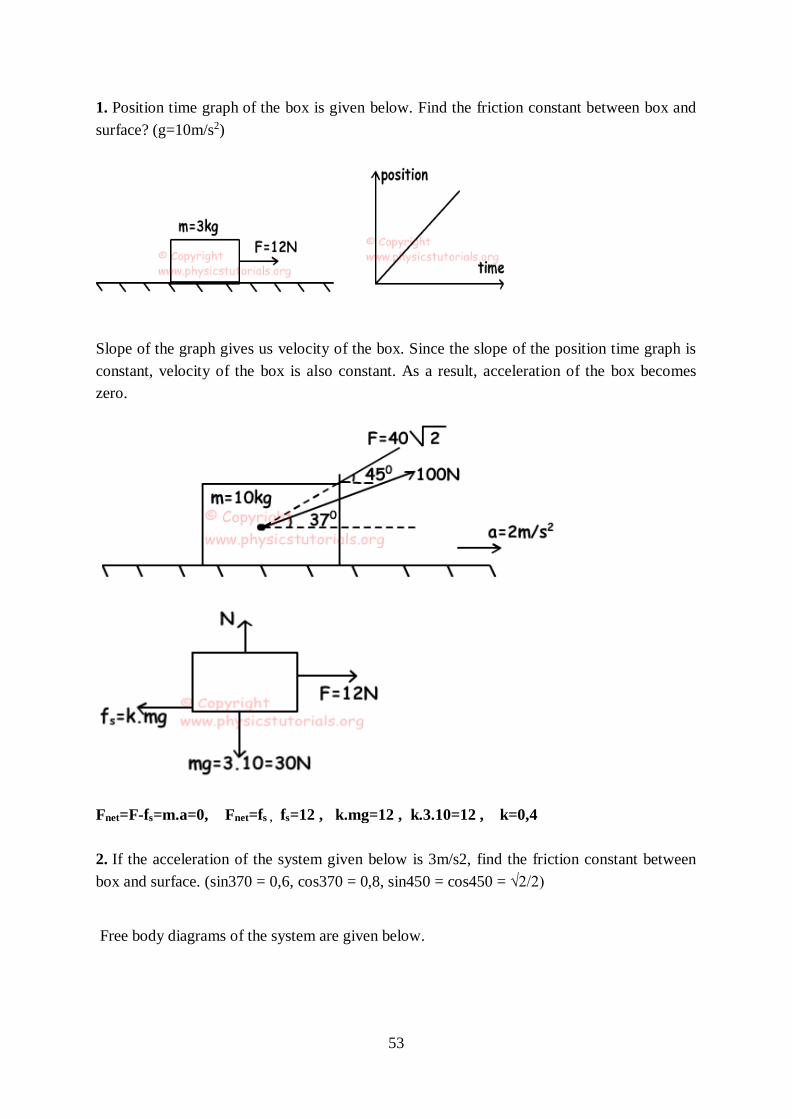
53
1. Position time graph of the box is given below. Find the friction constant between box and
surface? (g=10m/s2)
Slope of the graph gives us velocity of the box. Since the slope of the position time graph is
constant, velocity of the box is also constant. As a result, acceleration of the box becomes
zero.
Fnet=F-fs=m.a=0, Fnet=fs , fs=12 , k.mg=12 , k.3.10=12 , k=0,4
2. If the acceleration of the system given below is 3m/s2, find the friction constant between
box and surface. (sin370 = 0,6, cos370 = 0,8, sin450 = cos450 = √2/2)
Free body diagrams of the system are given below.
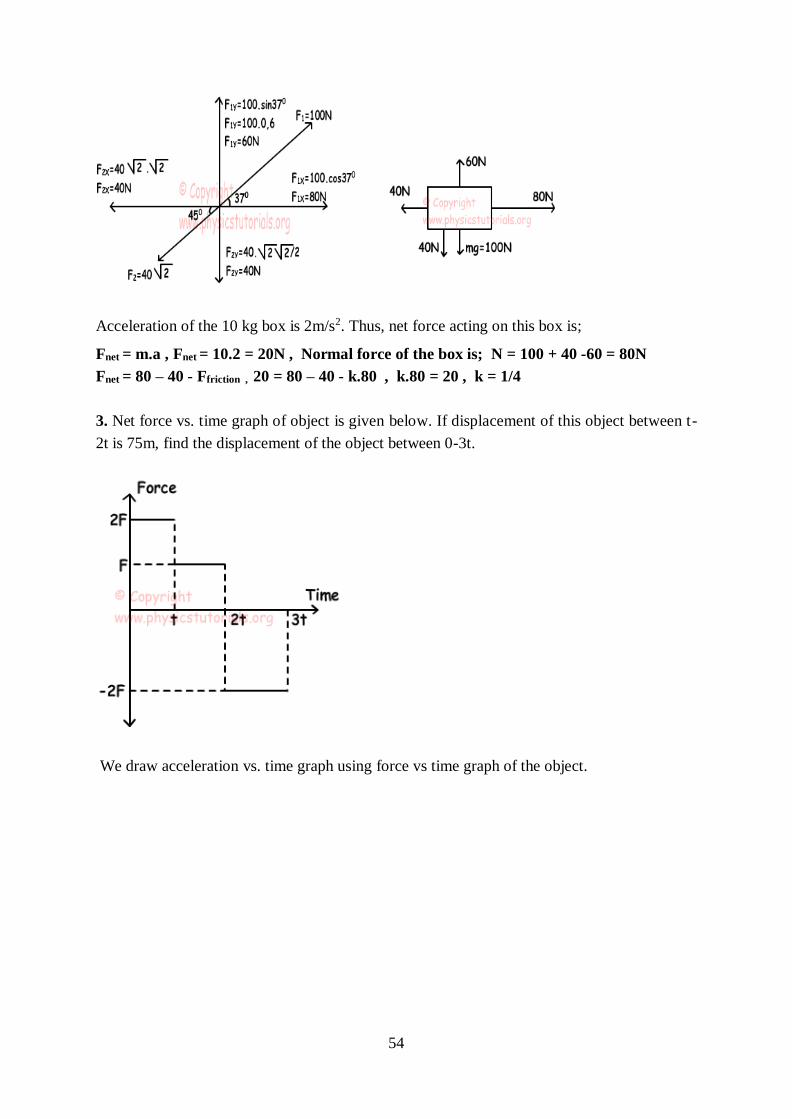
54
Acceleration of the 10 kg box is 2m/s2. Thus, net force acting on this box is;
Fnet = m.a , Fnet = 10.2 = 20N , Normal force of the box is; N = 100 + 40 -60 = 80N
Fnet = 80 – 40 - Ffriction , 20 = 80 – 40 - k.80 , k.80 = 20 , k = 1/4
3. Net force vs. time graph of object is given below. If displacement of this object between t-
2t is 75m, find the displacement of the object between 0-3t.
We draw acceleration vs. time graph using force vs time graph of the object.
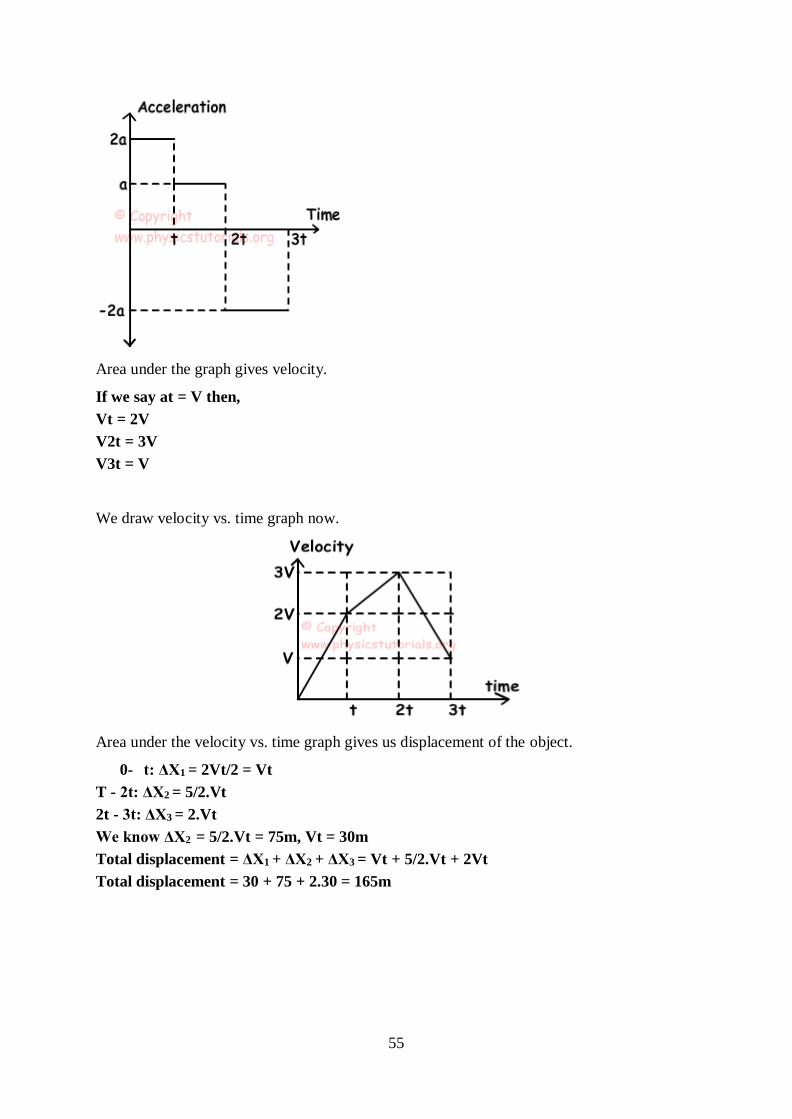
55
Area under the graph gives velocity.
If we say at = V then,
Vt = 2V
V2t = 3V
V3t = V
We draw velocity vs. time graph now.
Area under the velocity vs. time graph gives us displacement of the object.
0- t: ΔX1 = 2Vt/2 = Vt
T - 2t: ΔX2 = 5/2.Vt
2t - 3t: ΔX3 = 2.Vt
We know ΔX2 = 5/2.Vt = 75m, Vt = 30m
Total displacement = ΔX1 + ΔX2 + ΔX3 = Vt + 5/2.Vt + 2Vt
Total displacement = 30 + 75 + 2.30 = 165m
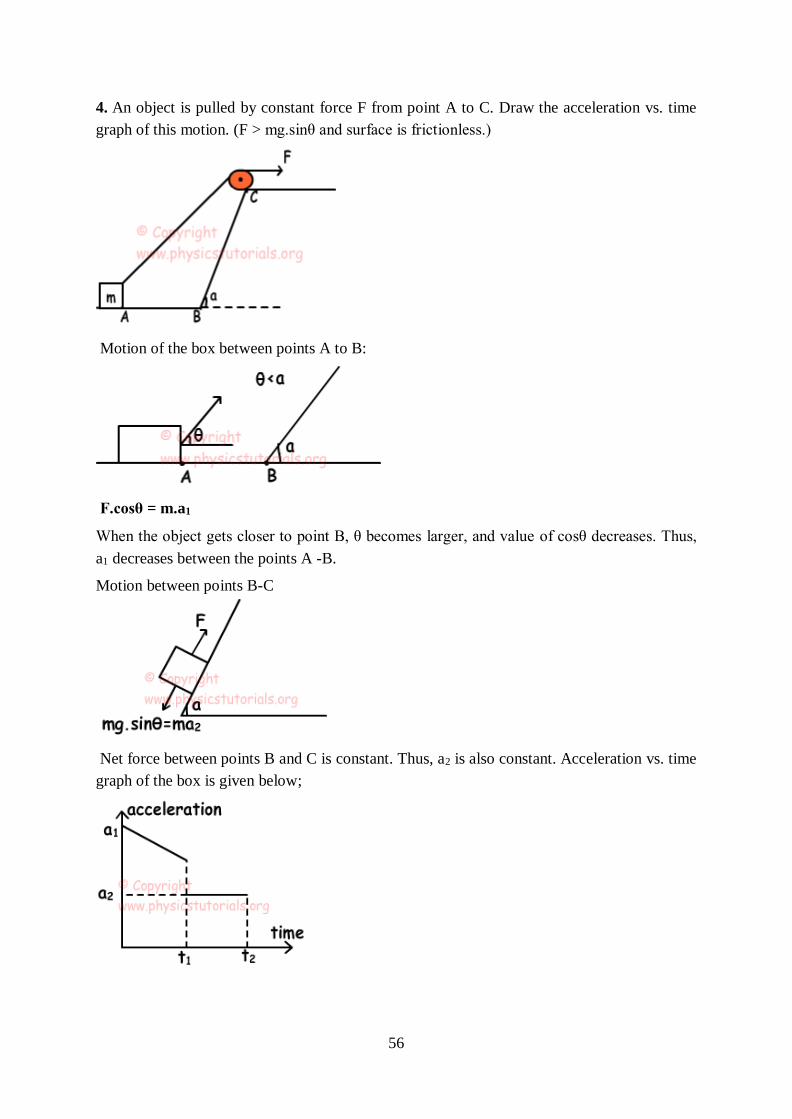
56
4. An object is pulled by constant force F from point A to C. Draw the acceleration vs. time
graph of this motion. (F > mg.sinθ and surface is frictionless.)
Motion of the box between points A to B:
F.cosθ = m.a1
When the object gets closer to point B, θ becomes larger, and value of cosθ decreases. Thus,
a1 decreases between the points A -B.
Motion between points B-C
Net force between points B and C is constant. Thus, a2 is also constant. Acceleration vs. time
graph of the box is given below;
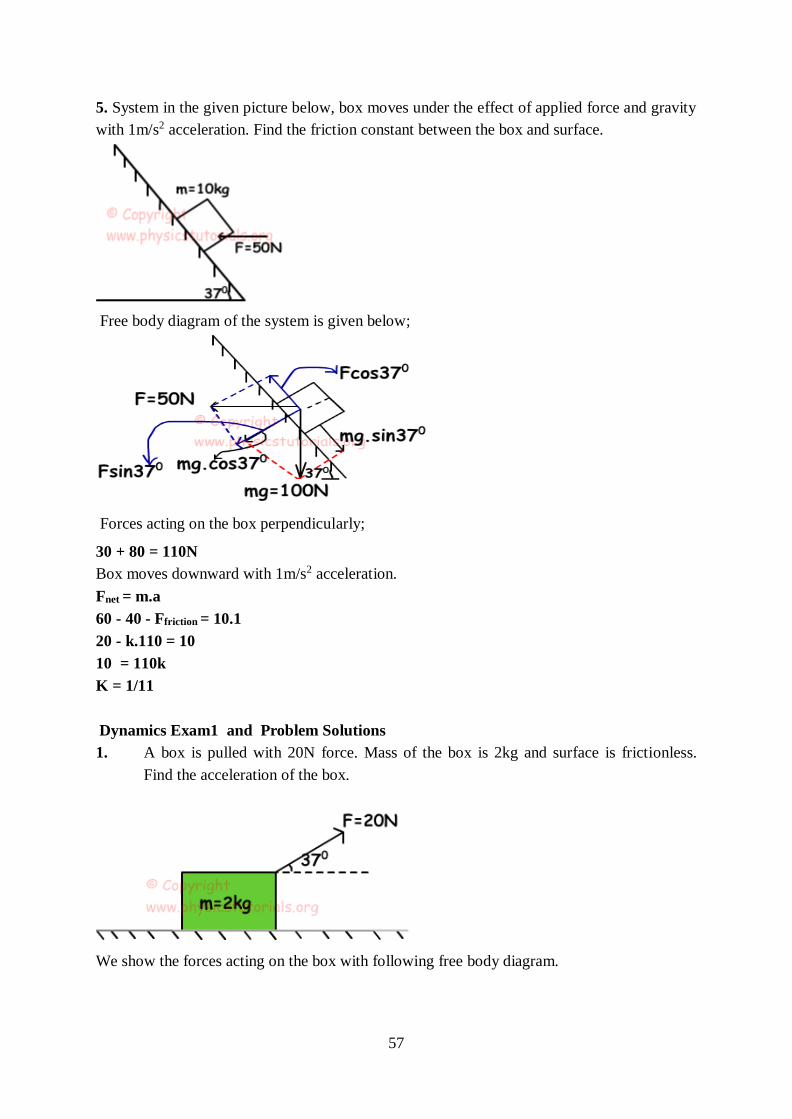
57
5. System in the given picture below, box moves under the effect of applied force and gravity
with 1m/s2 acceleration. Find the friction constant between the box and surface.
Free body diagram of the system is given below;
Forces acting on the box perpendicularly;
30 + 80 = 110N
Box moves downward with 1m/s2 acceleration.
Fnet = m.a
60 - 40 - Ffriction = 10.1
20 - k.110 = 10
10 = 110k
K = 1/11
Dynamics Exam1 and Problem Solutions
1. A box is pulled with 20N force. Mass of the box is 2kg and surface is frictionless.
Find the acceleration of the box.
We show the forces acting on the box with following free body diagram.
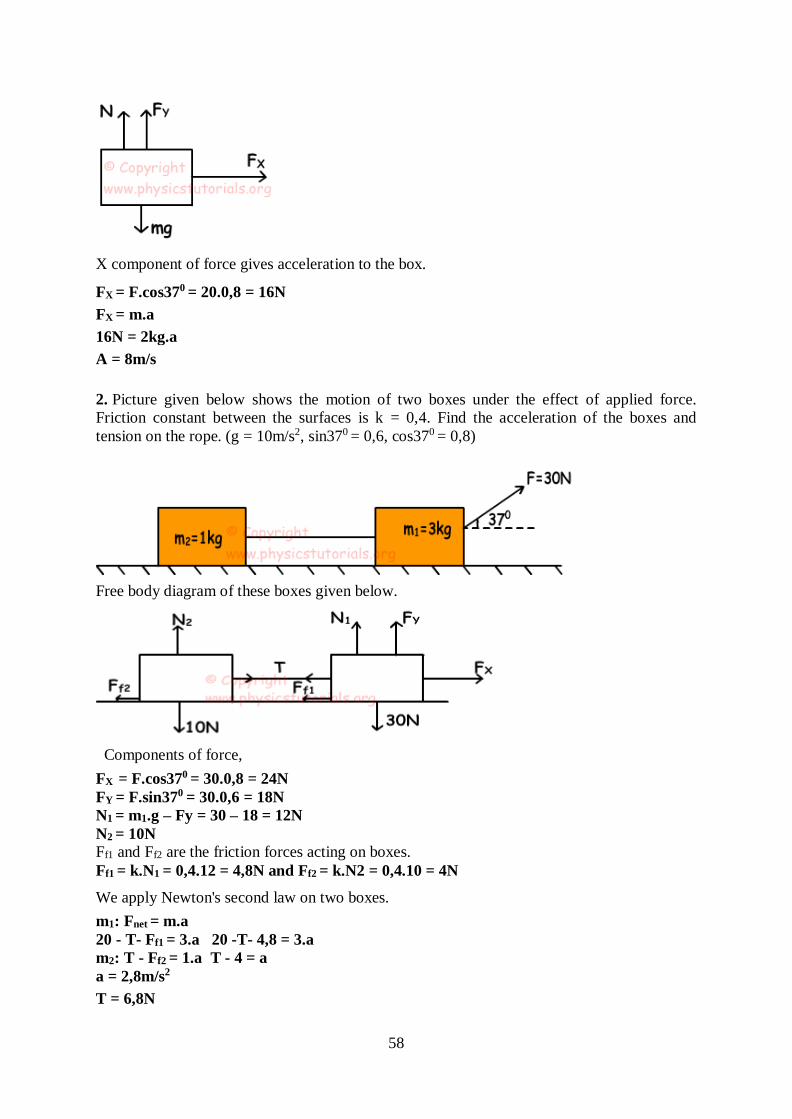
58
X component of force gives acceleration to the box.
FX = F.cos370 = 20.0,8 = 16N
FX = m.a
16N = 2kg.a
A = 8m/s
2. Picture given below shows the motion of two boxes under the effect of applied force.
Friction constant between the surfaces is k = 0,4. Find the acceleration of the boxes and
tension on the rope. (g = 10m/s2, sin370 = 0,6, cos370 = 0,8)
Free body diagram of these boxes given below.
Components of force,
FX = F.cos370 = 30.0,8 = 24N
FY = F.sin370 = 30.0,6 = 18N
N1 = m1.g – Fy = 30 – 18 = 12N
N2 = 10N Ff1 and Ff2 are the friction forces acting on boxes.
Ff1 = k.N1 = 0,4.12 = 4,8N and Ff2 = k.N2 = 0,4.10 = 4N
We apply Newton's second law on two boxes.
m1: Fnet = m.a
20 - T- Ff1 = 3.a 20 -T- 4,8 = 3.a
m2: T - Ff2 = 1.a T - 4 = a
a = 2,8m/s2
T = 6,8N
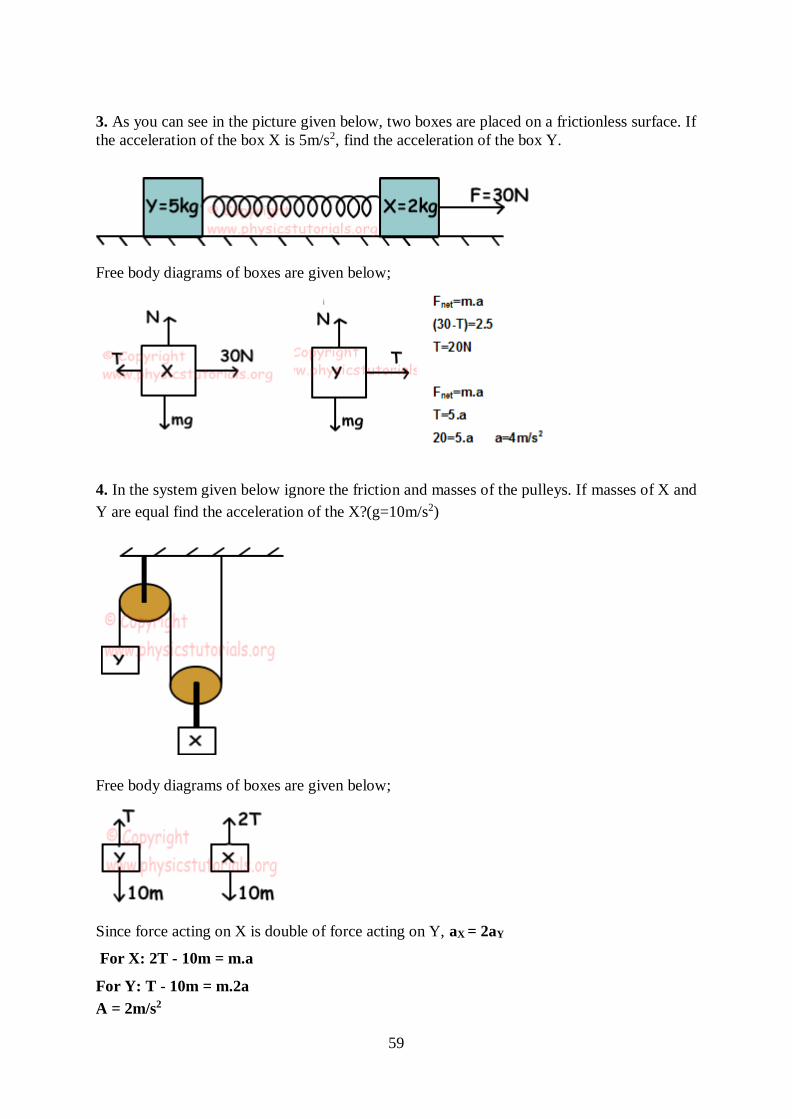
59
3. As you can see in the picture given below, two boxes are placed on a frictionless surface. If
the acceleration of the box X is 5m/s2, find the acceleration of the box Y.
Free body diagrams of boxes are given below;
4. In the system given below ignore the friction and masses of the pulleys. If masses of X and
Y are equal find the acceleration of the X?(g=10m/s2)
Free body diagrams of boxes are given below;
Since force acting on X is double of force acting on Y, aX = 2aY
For X: 2T - 10m = m.a
For Y: T - 10m = m.2a
A = 2m/s2
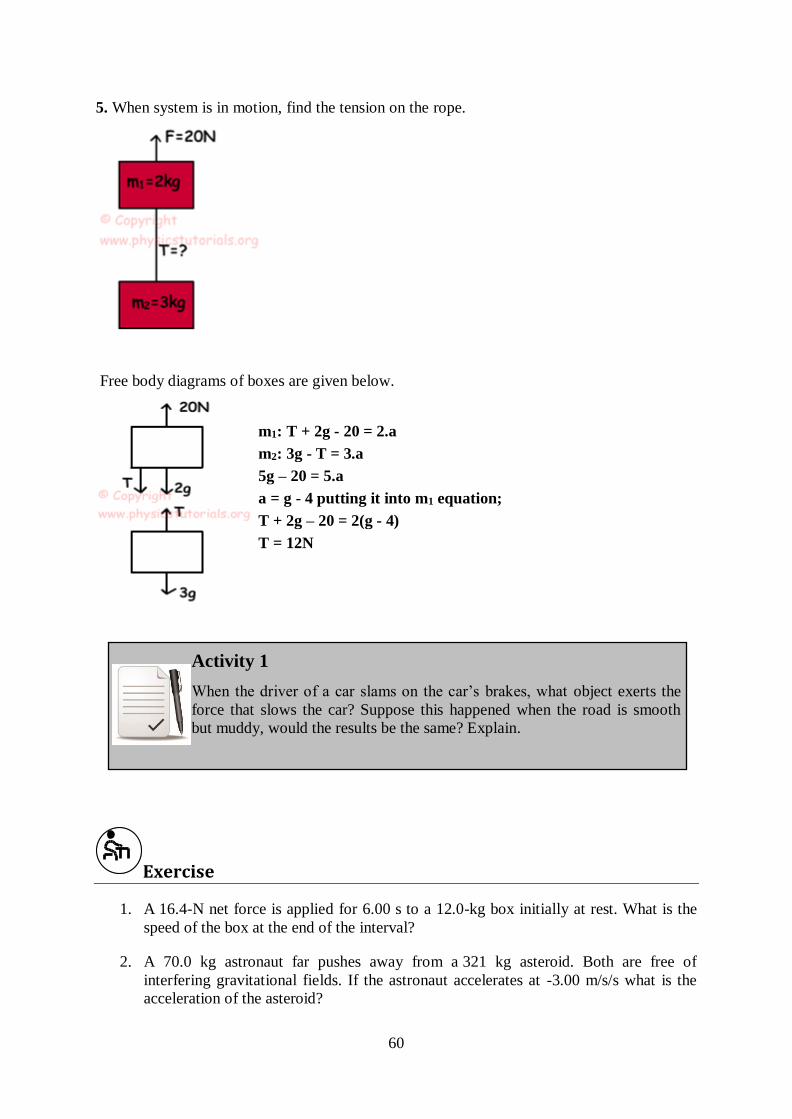
60
5. When system is in motion, find the tension on the rope.
Free body diagrams of boxes are given below.
m1: T + 2g - 20 = 2.a
m2: 3g - T = 3.a
5g – 20 = 5.a
a = g - 4 putting it into m1 equation;
T + 2g – 20 = 2(g - 4)
T = 12N
Activity 1
When the driver of a car slams on the car’s brakes, what object exerts the
force that slows the car? Suppose this happened when the road is smooth
but muddy, would the results be the same? Explain.
Exercise
1. A 16.4-N net force is applied for 6.00 s to a 12.0-kg box initially at rest. What is the
speed of the box at the end of the interval?
2. A 70.0 kg astronaut far pushes away from a 321 kg asteroid. Both are free of
interfering gravitational fields. If the astronaut accelerates at -3.00 m/s/s what is the
acceleration of the asteroid?

61
3. A sled is pulled by a rope at constant velocity across a horizontal surface. If a force of
80.0 N is being applied to the sled rope at an angle of 25.1 º to the ground, what is the
magnitude (in N) of the force of friction?
4. A student of mass 50 kg tests Newton's laws by standing on a bathroom scale in an
elevator. Assume that the scale reads in newtons. Find the scale reading when the
elevator is (a) accelerating upward at 0.5 m/s 2, (b) going up at a constant speed of
3.0 m/s and (c) going up but decelerating at 1.0 m/s2.
Summary
In this lecture, we have learned the application of the third Newton’s law of motion, which
states that ‘to every action there is an equal but opposite reaction.’ Friction refers to any force
resisting the relative motion of solid surfaces, fluid layers, and material elements sliding
against each other. There are two types of friction forces, frictional force and kinetic force.
We have learned about the friction law and its applications and the properties of friction.
References
Gottys,W., Keller, F.J. and Skove, M.J, Physics Classical and Modern, 1989. McGraw
Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
Rogers Muncaster, A-Level Physics, 4th Edition, Oxford Press.
62
SECTION TWO:
MECHANICS
Lecture 6: Work, Energy and Power
6.1 Introduction In this lecture, we shall discuss work, energy and power and how they relate. We shall further
discuss kinetic energy, potential energy, and mechanical energy as the sum of the two.
Further, we will discuss the principle of conservation of mechanical energy and situations in
which mechanical energy is conserved.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Describe the basic terminologies and concepts.
ii. Describe the work-energy relationship, and perform calculations.
iii. Describe the kinetic energy and potential energy of an object.
iv. Use equations related to work and power, to calculate the kinetic, potential and
total mechanical energy of objects.
v. Explain the Work-Energy Theorem.
vi. Describe mechanical energy conservation.
6.2 Work
Suppose that, a force is applied an object and object moves in the direction of applied force,
then we say work has been done. Let me explain in other words. There must be a force
applied to an object and object must move in the direction of the applied force. If the motion
is not in the direction of force or force is applied to an object but there is no motion then we
cannot talk about work. Now we formulize what we said above.
Since force is a vector quantity both having magnitude and direction work is also a vector
quantity and has same direction with applied force. We will symbolize force as F, and
distance as d in formulas and exercises. If there is an angle between force and direction of
motion, then we state our formula as given below;
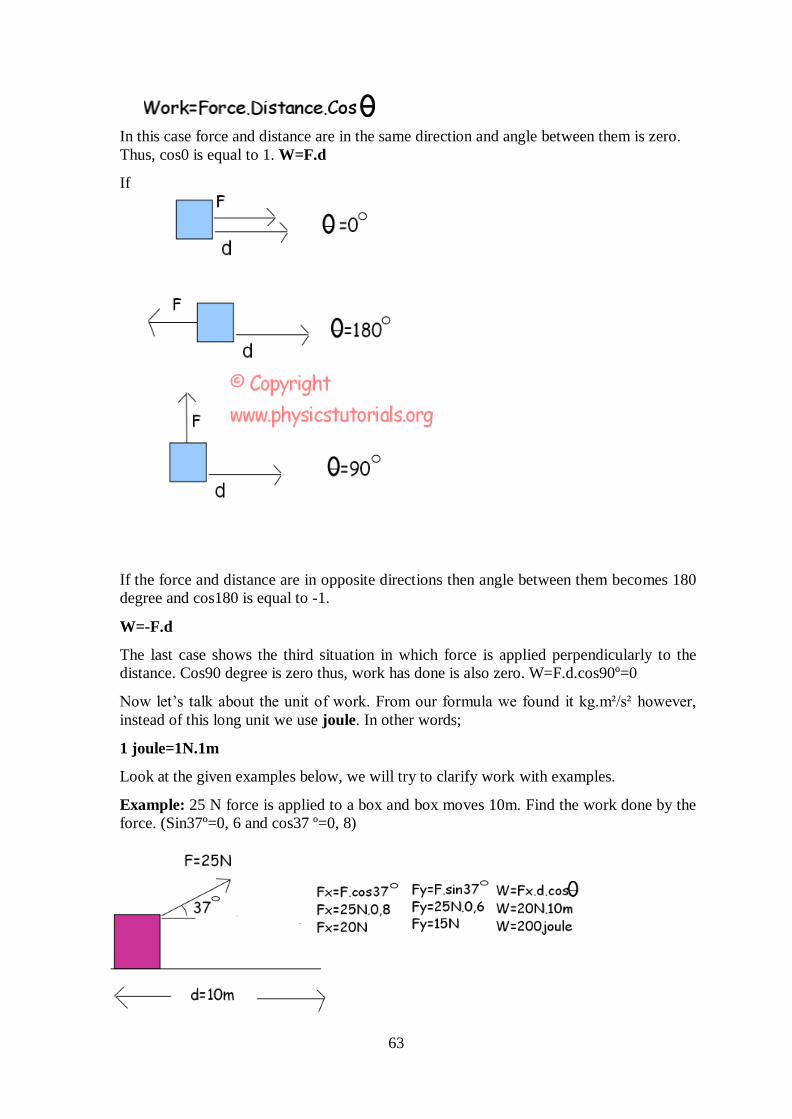
63
In this case force and distance are in the same direction and angle between them is zero.
Thus, cos0 is equal to 1. W=F.d
If
If the force and distance are in opposite directions then angle between them becomes 180
degree and cos180 is equal to -1.
W=-F.d
The last case shows the third situation in which force is applied perpendicularly to the
distance. Cos90 degree is zero thus, work has done is also zero. W=F.d.cos90º=0
Now let’s talk about the unit of work. From our formula we found it kg.m²/s² however,
instead of this long unit we use joule. In other words;
1 joule=1N.1m
Look at the given examples below, we will try to clarify work with examples.
Example: 25 N force is applied to a box and box moves 10m. Find the work done by the
force. (Sin37º=0, 6 and cos37 º=0, 8)

64
Since the box moves in X direction, we should find the X and Y components of the
applied force. Y component of the force does not responsible for the work. Motion of the
box is in X direction. So, we use the X component of the applied force. Since the angle
between X component of force and distance is zero cos0º becomes 1. I did not mention it
in the solution. If it was a different value than 1 I must write it also.
Example: Look at the given picture below. There is an apple having a force applied
perpendicularly on it. However, it moves 5m in X direction. Calculate the work done by
the force.
Example: If the box is touching to the wall and a force is applied finds the work done
by the force.
Box is touching to the wall and force cannot move it. Because there is no distance we cannot
talk about the work. As you can see our formula;
Work=Force. Distance
If one of the variables is zero then work done becomes zero.
6.3 Power Power is the rate of work done in a unit of time. It can be misunderstood by most of the
students. They think that more power full machine does more work. However, power just
shows us the time that the work requires. For example, same work is done by two different
people with different time. Say one of them does the work in 5 seconds and the other does in
8 seconds. Thus, the man doing same work in 5 seconds is more power full. The shorter the
time the more power full the man. Let’s represent it mathematically;
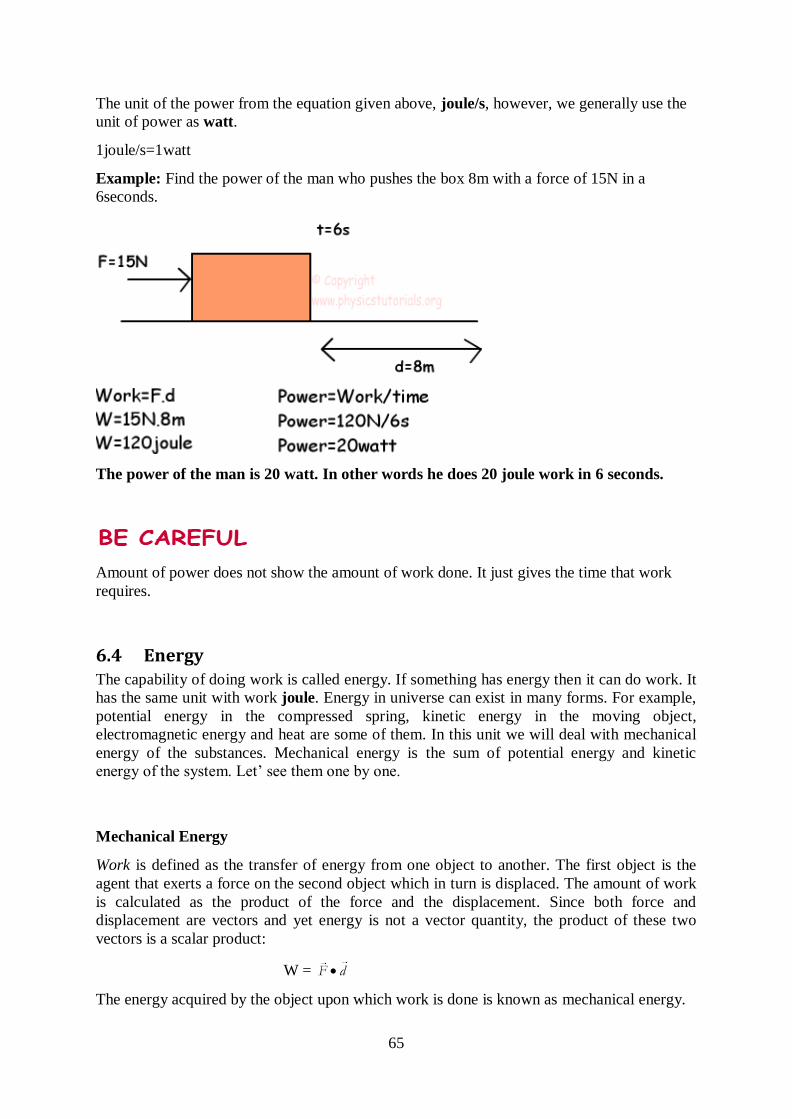
65
The unit of the power from the equation given above, joule/s, however, we generally use the
unit of power as watt.
1joule/s=1watt
Example: Find the power of the man who pushes the box 8m with a force of 15N in a
6seconds.
The power of the man is 20 watt. In other words he does 20 joule work in 6 seconds.
Amount of power does not show the amount of work done. It just gives the time that work
requires.
6.4 Energy The capability of doing work is called energy. If something has energy then it can do work. It
has the same unit with work joule. Energy in universe can exist in many forms. For example,
potential energy in the compressed spring, kinetic energy in the moving object,
electromagnetic energy and heat are some of them. In this unit we will deal with mechanical
energy of the substances. Mechanical energy is the sum of potential energy and kinetic
energy of the system. Let’ see them one by one.
Mechanical Energy
Work is defined as the transfer of energy from one object to another. The first object is the
agent that exerts a force on the second object which in turn is displaced. The amount of work
is calculated as the product of the force and the displacement. Since both force and
displacement are vectors and yet energy is not a vector quantity, the product of these two
vectors is a scalar product:
W = F d
The energy acquired by the object upon which work is done is known as mechanical energy.
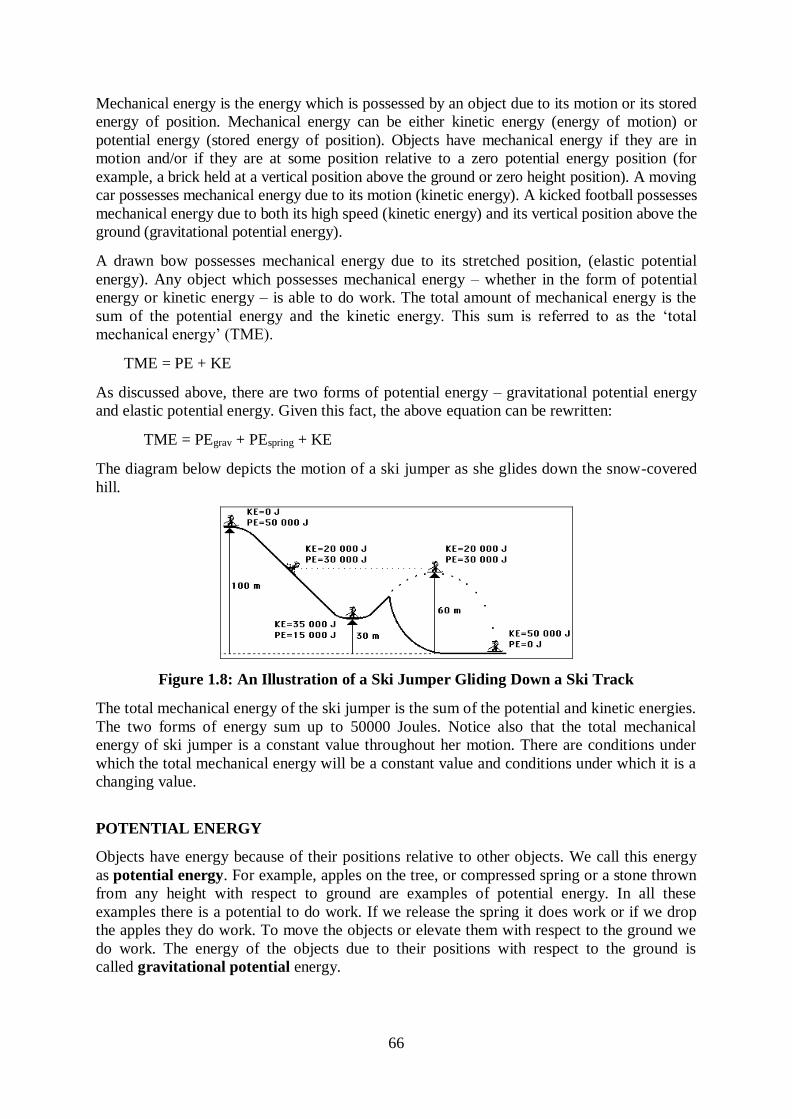
66
Mechanical energy is the energy which is possessed by an object due to its motion or its stored
energy of position. Mechanical energy can be either kinetic energy (energy of motion) or
potential energy (stored energy of position). Objects have mechanical energy if they are in
motion and/or if they are at some position relative to a zero potential energy position (for
example, a brick held at a vertical position above the ground or zero height position). A moving
car possesses mechanical energy due to its motion (kinetic energy). A kicked football possesses
mechanical energy due to both its high speed (kinetic energy) and its vertical position above the
ground (gravitational potential energy).
A drawn bow possesses mechanical energy due to its stretched position, (elastic potential
energy). Any object which possesses mechanical energy – whether in the form of potential
energy or kinetic energy – is able to do work. The total amount of mechanical energy is the
sum of the potential energy and the kinetic energy. This sum is referred to as the ‘total
mechanical energy’ (TME).
TME = PE + KE
As discussed above, there are two forms of potential energy – gravitational potential energy
and elastic potential energy. Given this fact, the above equation can be rewritten:
TME = PEgrav + PEspring + KE
The diagram below depicts the motion of a ski jumper as she glides down the snow-covered
hill.
Figure 1.8: An Illustration of a Ski Jumper Gliding Down a Ski Track
The total mechanical energy of the ski jumper is the sum of the potential and kinetic energies.
The two forms of energy sum up to 50000 Joules. Notice also that the total mechanical
energy of ski jumper is a constant value throughout her motion. There are conditions under
which the total mechanical energy will be a constant value and conditions under which it is a
changing value.
POTENTIAL ENERGY
Objects have energy because of their positions relative to other objects. We call this energy
as potential energy. For example, apples on the tree, or compressed spring or a stone thrown
from any height with respect to ground are examples of potential energy. In all these
examples there is a potential to do work. If we release the spring it does work or if we drop
the apples they do work. To move the objects or elevate them with respect to the ground we
do work. The energy of the objects due to their positions with respect to the ground is
called gravitational potential energy.
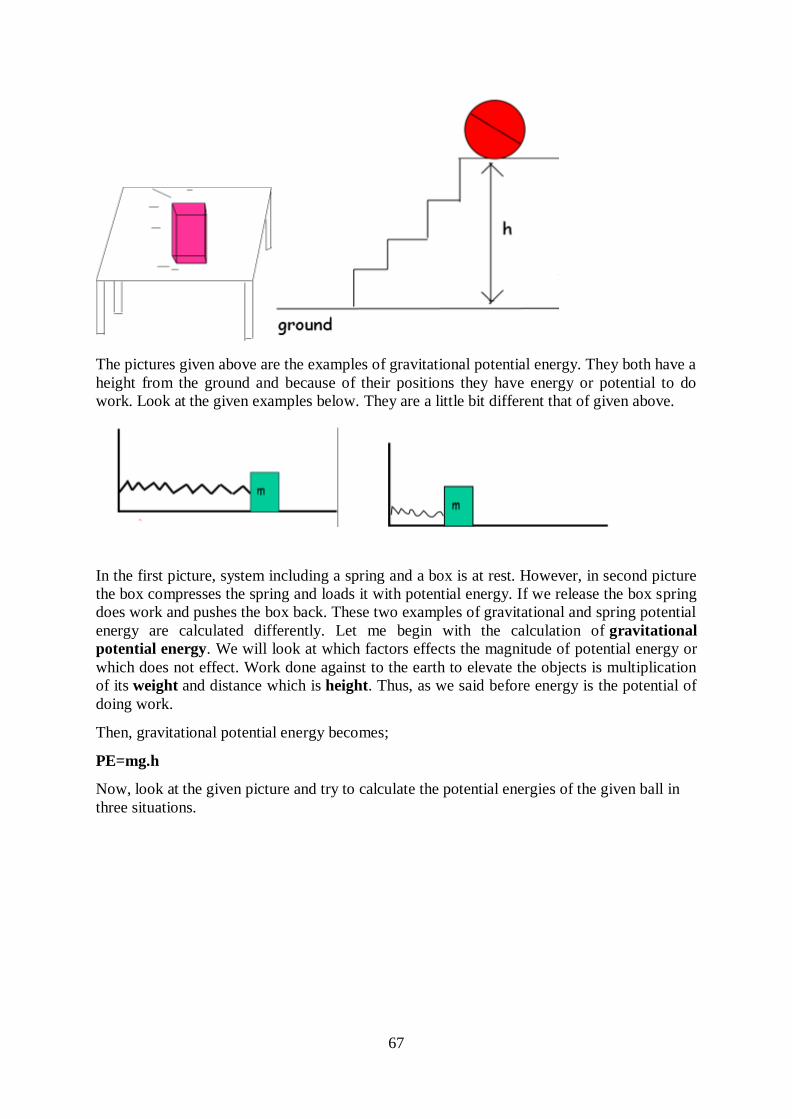
67
The pictures given above are the examples of gravitational potential energy. They both have a
height from the ground and because of their positions they have energy or potential to do
work. Look at the given examples below. They are a little bit different that of given above.
In the first picture, system including a spring and a box is at rest. However, in second picture
the box compresses the spring and loads it with potential energy. If we release the box spring
does work and pushes the box back. These two examples of gravitational and spring potential
energy are calculated differently. Let me begin with the calculation of gravitational
potential energy. We will look at which factors effects the magnitude of potential energy or
which does not effect. Work done against to the earth to elevate the objects is multiplication
of its weight and distance which is height. Thus, as we said before energy is the potential of
doing work.
Then, gravitational potential energy becomes;
PE=mg.h
Now, look at the given picture and try to calculate the potential energies of the given ball in
three situations.

68
We see that gravitational potential energy depends on the weight and height of the object.
Now let’s solve some more examples related to this topic before passing to the kinetic energy.
Example: In the pictures given below, if the potential energy of the ball in the first picture is
P find the potential energy of the ball in second situation in terms of P.
Situation 1 : P=m.g.h=mgh
Situation 2: P’=m.g.2h=2mgh=2P
POTENTIAL ENERGY OF THE SPRING
By compressing the spring or stretching it you load a potential energy to it. Well, if I apply
same force to different springs having different thicknesses, are they loaded with the same
energy? I hear that you all say no! You are absolutely right. Of course the thinner spring is
more compressed than the thicker one where the quantity of compression shows the loaded
potential energy. What I want to say is that, potential energy of the spring depends on the
type of spring and the amount of compression. The mathematical representation of this
definition is given below.
Ep=1/2.k.x²
Where k is the spring constant and x is the amount of compression.
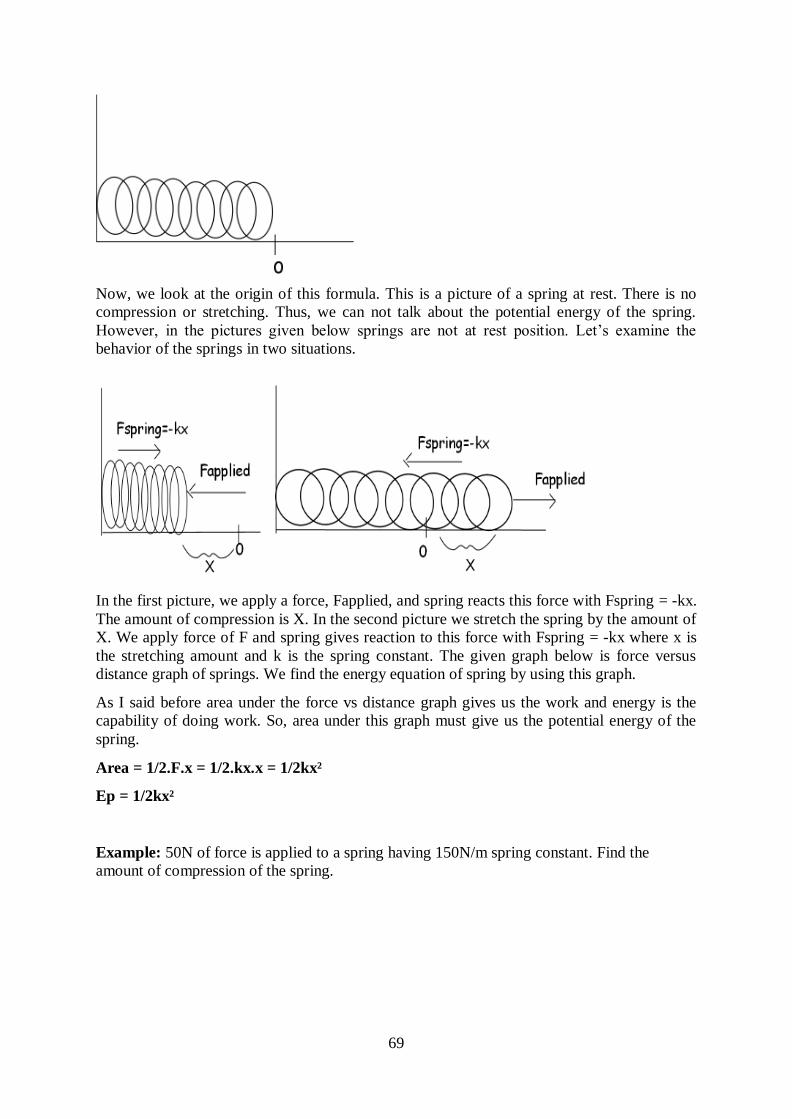
69
Now, we look at the origin of this formula. This is a picture of a spring at rest. There is no
compression or stretching. Thus, we can not talk about the potential energy of the spring.
However, in the pictures given below springs are not at rest position. Let’s examine the
behavior of the springs in two situations.
In the first picture, we apply a force, Fapplied, and spring reacts this force with Fspring = -kx.
The amount of compression is X. In the second picture we stretch the spring by the amount of
X. We apply force of F and spring gives reaction to this force with Fspring = -kx where x is
the stretching amount and k is the spring constant. The given graph below is force versus
distance graph of springs. We find the energy equation of spring by using this graph.
As I said before area under the force vs distance graph gives us the work and energy is the
capability of doing work. So, area under this graph must give us the potential energy of the
spring.
Area = 1/2.F.x = 1/2.kx.x = 1/2kx²
Ep = 1/2kx²
Example: 50N of force is applied to a spring having 150N/m spring constant. Find the
amount of compression of the spring.
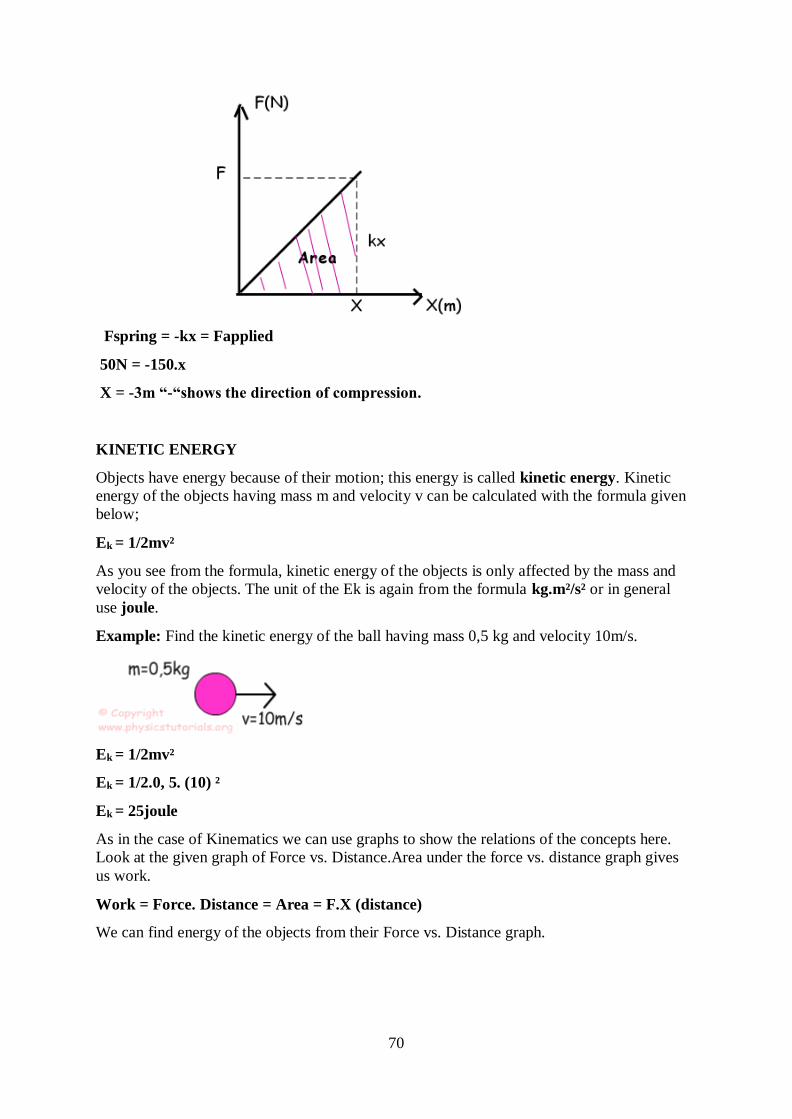
70
Fspring = -kx = Fapplied
50N = -150.x
X = -3m “-“shows the direction of compression.
KINETIC ENERGY
Objects have energy because of their motion; this energy is called kinetic energy. Kinetic
energy of the objects having mass m and velocity v can be calculated with the formula given
below;
Ek = 1/2mv²
As you see from the formula, kinetic energy of the objects is only affected by the mass and
velocity of the objects. The unit of the Ek is again from the formula kg.m²/s² or in general
use joule.
Example: Find the kinetic energy of the ball having mass 0,5 kg and velocity 10m/s.
Ek = 1/2mv²
Ek = 1/2.0, 5. (10) ²
Ek = 25joule
As in the case of Kinematics we can use graphs to show the relations of the concepts here.
Look at the given graph of Force vs. Distance.Area under the force vs. distance graph gives
us work.
Work = Force. Distance = Area = F.X (distance)
We can find energy of the objects from their Force vs. Distance graph.
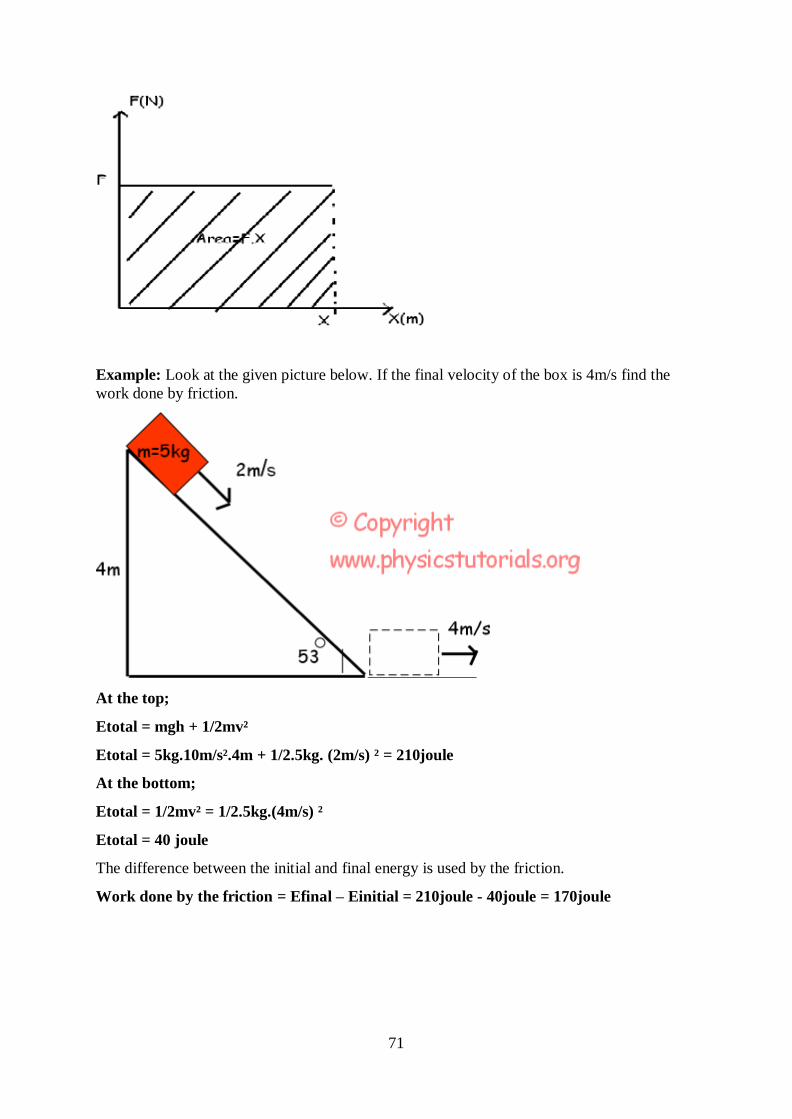
71
Example: Look at the given picture below. If the final velocity of the box is 4m/s find the
work done by friction.
At the top;
Etotal = mgh + 1/2mv²
Etotal = 5kg.10m/s².4m + 1/2.5kg. (2m/s) ² = 210joule
At the bottom;
Etotal = 1/2mv² = 1/2.5kg.(4m/s) ²
Etotal = 40 joule
The difference between the initial and final energy is used by the friction.
Work done by the friction = Efinal – Einitial = 210joule - 40joule = 170joule
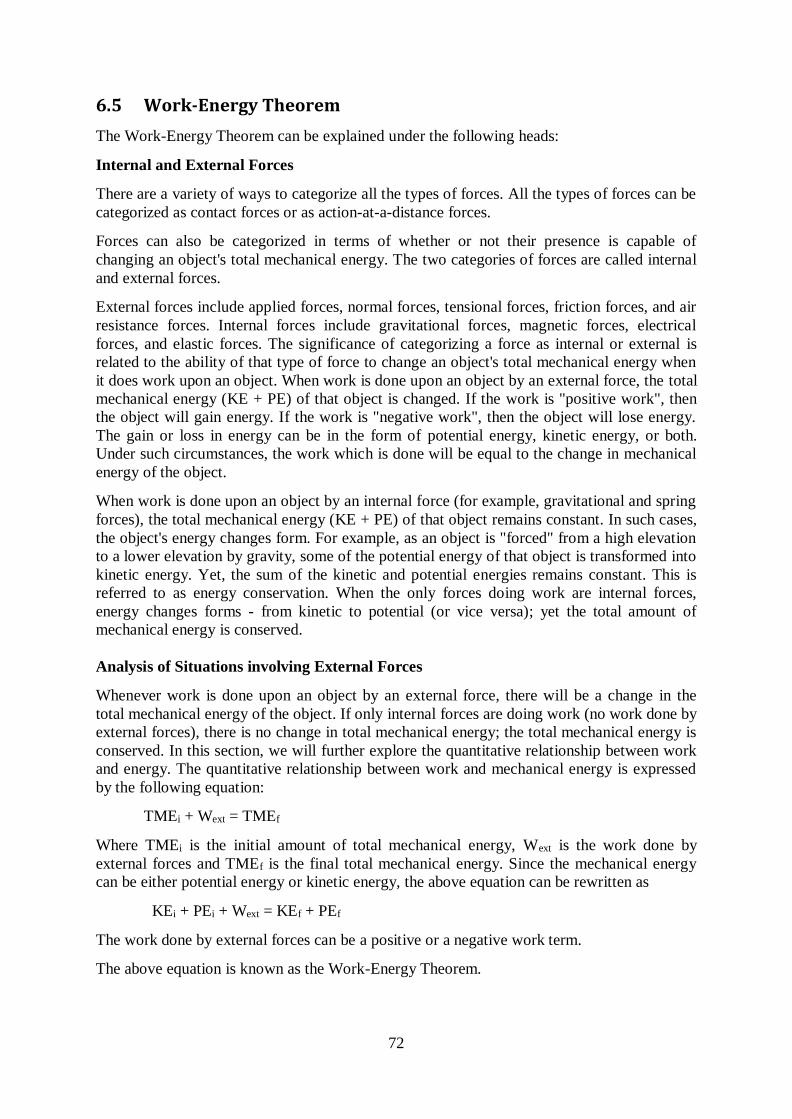
72
6.5 Work-Energy Theorem
The Work-Energy Theorem can be explained under the following heads:
Internal and External Forces
There are a variety of ways to categorize all the types of forces. All the types of forces can be
categorized as contact forces or as action-at-a-distance forces.
Forces can also be categorized in terms of whether or not their presence is capable of
changing an object's total mechanical energy. The two categories of forces are called internal
and external forces.
External forces include applied forces, normal forces, tensional forces, friction forces, and air
resistance forces. Internal forces include gravitational forces, magnetic forces, electrical
forces, and elastic forces. The significance of categorizing a force as internal or external is
related to the ability of that type of force to change an object's total mechanical energy when
it does work upon an object. When work is done upon an object by an external force, the total
mechanical energy (KE + PE) of that object is changed. If the work is "positive work", then
the object will gain energy. If the work is "negative work", then the object will lose energy.
The gain or loss in energy can be in the form of potential energy, kinetic energy, or both.
Under such circumstances, the work which is done will be equal to the change in mechanical
energy of the object.
When work is done upon an object by an internal force (for example, gravitational and spring
forces), the total mechanical energy (KE + PE) of that object remains constant. In such cases,
the object's energy changes form. For example, as an object is "forced" from a high elevation
to a lower elevation by gravity, some of the potential energy of that object is transformed into
kinetic energy. Yet, the sum of the kinetic and potential energies remains constant. This is
referred to as energy conservation. When the only forces doing work are internal forces,
energy changes forms - from kinetic to potential (or vice versa); yet the total amount of
mechanical energy is conserved.
Analysis of Situations involving External Forces
Whenever work is done upon an object by an external force, there will be a change in the
total mechanical energy of the object. If only internal forces are doing work (no work done by
external forces), there is no change in total mechanical energy; the total mechanical energy is
conserved. In this section, we will further explore the quantitative relationship between work
and energy. The quantitative relationship between work and mechanical energy is expressed
by the following equation:
TMEi + Wext = TMEf
Where TMEi is the initial amount of total mechanical energy, Wext is the work done by
external forces and TMEf is the final total mechanical energy. Since the mechanical energy
can be either potential energy or kinetic energy, the above equation can be rewritten as
KEi + PEi + Wext = KEf + PEf
The work done by external forces can be a positive or a negative work term.
The above equation is known as the Work-Energy Theorem.
73
The work-energy theorem is the basis for the rest of this section. It forms the basis of the
conceptual aspect of a powerful approach to solving mathematical problems.
Consider a weightlifter who applies an upwards force F (say 100 N) to a weight to displace
it upwards at given distance d (say 0.25 meters) at a constant speed. According to the work-
energy theorem, the initial energy plus the work done by the external force equals the final
energy. If the weight begins with 150 Joules of energy (this is just a made-up value), and the
weightlifter does 25 Joules of work, TMEi
. cosextW F d Fd = 100 × 0.25 cos0 = 25.0 J
then the weight will finish with 125 Joules of mechanical energy.
The final energy (125 J) is equal to the initial energy (100 J) plus the work done by external
forces (25 J).
Now consider a car which is skidding from a high speed to a lower speed. The force of
friction between the tyres and the road exerts a leftward force (say 8000 N) on the rightward
moving car over a given distance (say 30 m). According to the work-energy theorem, the
initial energy plus the work done by the external force equals the final energy. If the car
begins with say 320 000 Joules of energy and the friction force does
– 240 000 Joules of work
cos180 8000 30 ( 1)frictionW Fd = – 240000 J
then the car will finish with 80 000 Joules of mechanical energy. The final energy
(80,000 J) is equal to the initial energy (3,20,000 J) plus the work done by external forces (–
2,40,000 J).
In each of these examples, an external force does work upon an object over a given distance
to change the total mechanical energy of the object. If the external force does positive work,
then the object gains energy; the amount of energy gained is equal to the work done on the
object. If the external force does negative work, then the object loses energy; the amount of
energy lost is equal to the work done on the object. In general, the total energy of the object
in the initial state (prior to the work being done) plus the work done equals the total energy in
the final state.
The work-energy theorem can be combined with the expressions for potential and kinetic
energy to solve complex problems. Like all complex problems, they can be made simple if
first analyzed from a conceptual viewpoint and broken down into parts.

74
1. A 1000 kg car travelling with a speed of 25 m/s skids to a stop. The car
experiences an 8000 N force of friction. Determine the stopping distance of
the car.
2. At the end of a roller-coaster ride, the 6000 kg train of cars (includes
passengers) is slowed from a speed of 20 m/s to a speed of 5 m/s over a
distance of 20 meters. Determine the braking force required to slow the train
of cars by this amount.
3. A shopping cart full of groceries placed at the top of a 2 m hill begins to roll
until it hits a stump at the bottom of the hill. Upon impact, a 0.25 kg can of
peaches flies horizontally out of the shopping cart and hits a parked car with
an average force of 500 N. How deep a dent is made in the car (i.e. over what
distance does the 500 N force act upon the can of peaches before bringing it
to a stop)?
All three of the above problems have one thing in common: there is a force which does work
over a distance in order to remove mechanical energy from an object. The force acts opposite
the object's motion (angle between force and displacement is 180) and thus does "negative
work;" negative work means that the object loses energy. In each situation, the work is related
to the kinetic energy change. And since the distance (d) over which the force does work is
related to the work and since the velocity squared (v2) of the object is related to the kinetic
energy, there must also be a direct relation between the stopping distance and the velocity
squared. Observe the derivation below:
i ext fTME W TME
0i extKE W
21cos180 0
2mv Fd
21
2mv Fd
v2 d
The above equation depicts stopping distance as being dependent upon the square of the
velocity. This means that a twofold increase in velocity would result in a fourfold (two
squared) increase in stopping distance. A threefold increase in velocity would result in a nine-
75
fold (three squared) increase in stopping distance. And a fourfold increase in velocity would
result in a 16-fold (four squared) increase in stopping distance. As shown, an equation is a not
merely an algebraic recipe for solving problems; equations are also cognitive guides to
thinking about how two quantities are related to each other. In this case for a force bringing
an object to a stop over a given distance, the stopping distance of the object is related to the
square of the velocity of the object.
The examples mentioned above involve the application of the work-energy theorem to
situations involving external forces doing work. An entirely different outcome results in
situations in which there is no work done by external forces.
6.6 Conservation of Mechanical Energy
Whenever work is done upon an object by an external force, there will be a change in the
total mechanical energy of the object. If only internal forces are doing work (no work done by
external forces), there is no change in total mechanical energy; the total mechanical energy is
said to be "conserved." In this section, we will further explore the quantitative relationship
between work and mechanical energy in situations in which there are no external forces doing
work.
The quantitative relationship between work and the two forms of mechanical energy is
expressed by the work–energy theorem:
KEi + PEi + Wext = KEf + PEf
The equation illustrates that the total mechanical energy (KE + PE) of the object is changed
as a result of work done by external forces. There are a host of other situations in which the
only forces doing work are internal forces. In such situations, the total mechanical energy of
the object is not changed. In such instances, it is sometimes said that the mechanical energy is
"conserved." The previous equation can be simplified to the following form:
KEi + PEi = KEf + PEf
In these situations, the sum of the kinetic and potential energy is the same everywhere. As
kinetic energy is decreased (due to the object slowing down), the potential energy is increased
(due to the stretch/compression of a spring or an increase in height above the Earth). As
kinetic energy is increased (due to the object speeding up), the potential energy is decreased
(due to the return of a spring to its rest position or a decrease in height above the Earth).
Energy is transformed from kinetic energy to potential energy (or vice versa) – yet the total
amount present is conserved.
The tendency of an object to conserve its mechanical energy is observed whenever external
forces are not doing work. If the influence of friction and air resistance can be ignored (or
assumed to be negligible) and all other external forces are absent or merely not doing work,
then the object is often said to conserve its energy. Consider a pendulum bob swinging to and
fro on the end of a string. There are only two forces acting upon the pendulum bob. Gravity
(an internal force) acts downward and the tensional force (an external force) pulls upwards
towards the pivot point. The external force does not do work since at all times it is directed at
right angle to the motion.
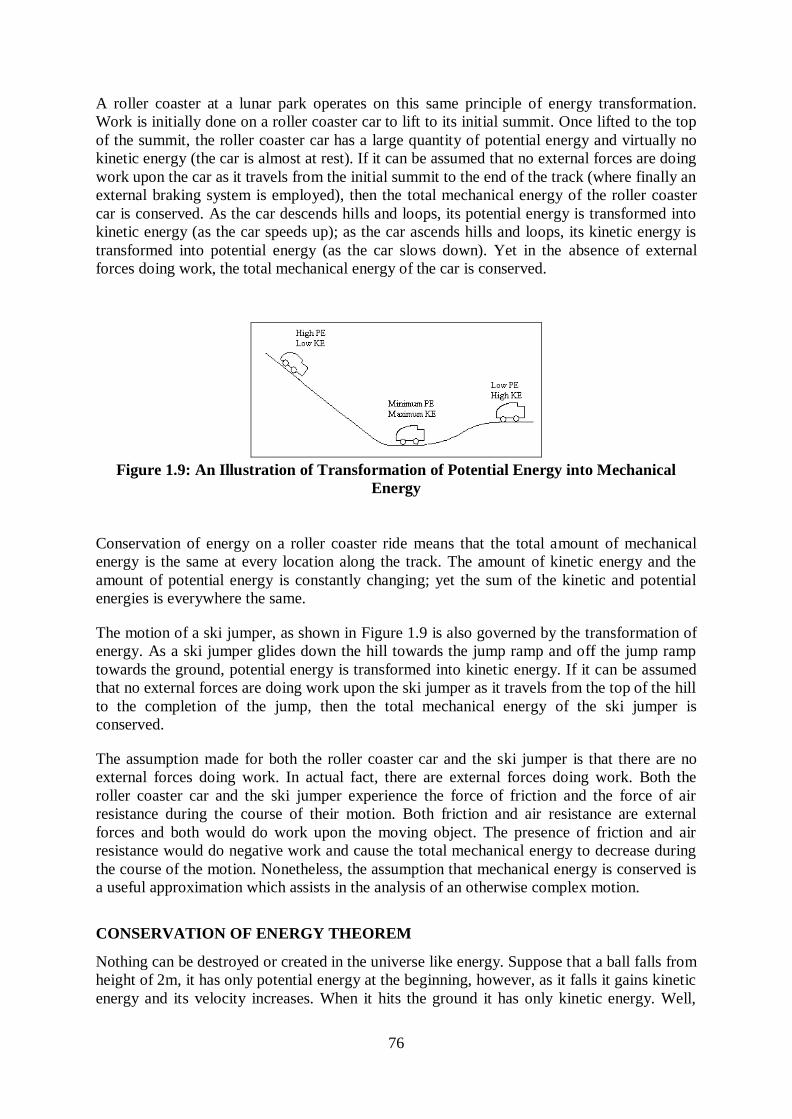
76
A roller coaster at a lunar park operates on this same principle of energy transformation.
Work is initially done on a roller coaster car to lift to its initial summit. Once lifted to the top
of the summit, the roller coaster car has a large quantity of potential energy and virtually no
kinetic energy (the car is almost at rest). If it can be assumed that no external forces are doing
work upon the car as it travels from the initial summit to the end of the track (where finally an
external braking system is employed), then the total mechanical energy of the roller coaster
car is conserved. As the car descends hills and loops, its potential energy is transformed into
kinetic energy (as the car speeds up); as the car ascends hills and loops, its kinetic energy is
transformed into potential energy (as the car slows down). Yet in the absence of external
forces doing work, the total mechanical energy of the car is conserved.
Figure 1.9: An Illustration of Transformation of Potential Energy into Mechanical
Energy
Conservation of energy on a roller coaster ride means that the total amount of mechanical
energy is the same at every location along the track. The amount of kinetic energy and the
amount of potential energy is constantly changing; yet the sum of the kinetic and potential
energies is everywhere the same.
The motion of a ski jumper, as shown in Figure 1.9 is also governed by the transformation of
energy. As a ski jumper glides down the hill towards the jump ramp and off the jump ramp
towards the ground, potential energy is transformed into kinetic energy. If it can be assumed
that no external forces are doing work upon the ski jumper as it travels from the top of the hill
to the completion of the jump, then the total mechanical energy of the ski jumper is
conserved.
The assumption made for both the roller coaster car and the ski jumper is that there are no
external forces doing work. In actual fact, there are external forces doing work. Both the
roller coaster car and the ski jumper experience the force of friction and the force of air
resistance during the course of their motion. Both friction and air resistance are external
forces and both would do work upon the moving object. The presence of friction and air
resistance would do negative work and cause the total mechanical energy to decrease during
the course of the motion. Nonetheless, the assumption that mechanical energy is conserved is
a useful approximation which assists in the analysis of an otherwise complex motion.
CONSERVATION OF ENERGY THEOREM
Nothing can be destroyed or created in the universe like energy. Suppose that a ball falls from
height of 2m, it has only potential energy at the beginning, however, as it falls it gains kinetic
energy and its velocity increases. When it hits the ground it has only kinetic energy. Well,
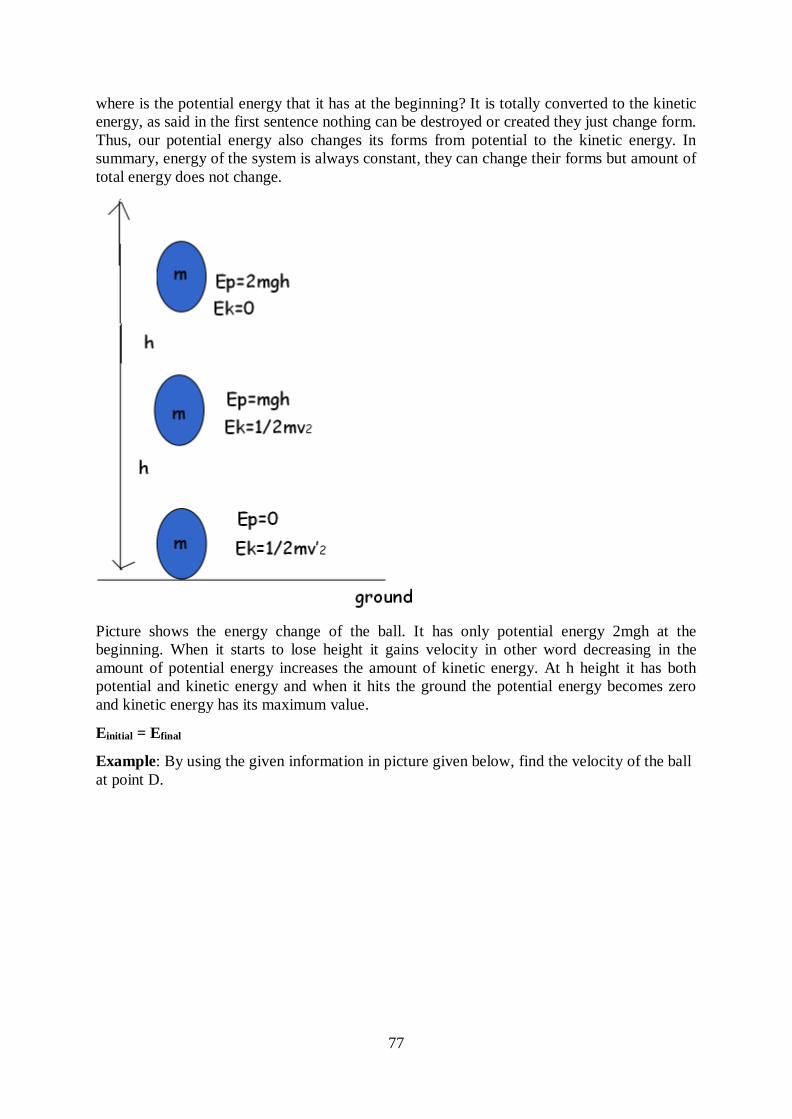
77
where is the potential energy that it has at the beginning? It is totally converted to the kinetic
energy, as said in the first sentence nothing can be destroyed or created they just change form.
Thus, our potential energy also changes its forms from potential to the kinetic energy. In
summary, energy of the system is always constant, they can change their forms but amount of
total energy does not change.
Picture shows the energy change of the ball. It has only potential energy 2mgh at the
beginning. When it starts to lose height it gains velocity in other word decreasing in the
amount of potential energy increases the amount of kinetic energy. At h height it has both
potential and kinetic energy and when it hits the ground the potential energy becomes zero
and kinetic energy has its maximum value.
Einitial = Efinal
Example: By using the given information in picture given below, find the velocity of the ball
at point D.
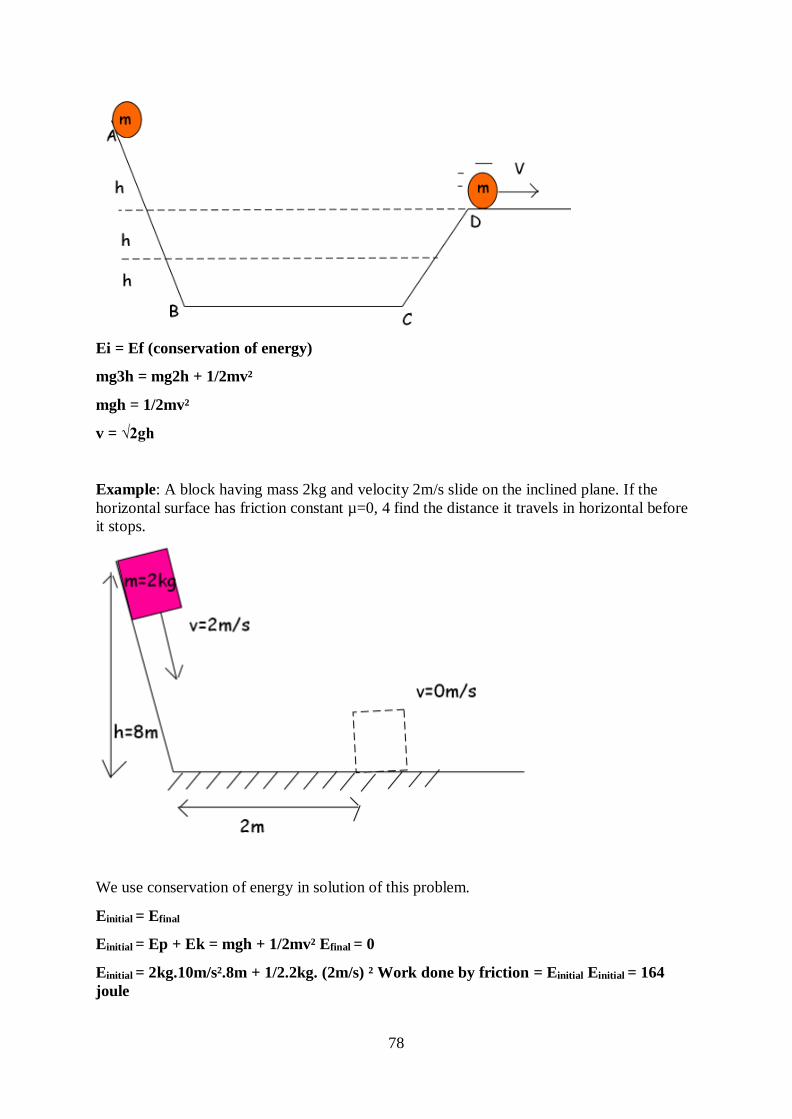
78
Ei = Ef (conservation of energy)
mg3h = mg2h + 1/2mv²
mgh = 1/2mv²
v = √2gh
Example: A block having mass 2kg and velocity 2m/s slide on the inclined plane. If the
horizontal surface has friction constant µ=0, 4 find the distance it travels in horizontal before
it stops.
We use conservation of energy in solution of this problem.
Einitial = Efinal
Einitial = Ep + Ek = mgh + 1/2mv² Efinal = 0
Einitial = 2kg.10m/s².8m + 1/2.2kg. (2m/s) ² Work done by friction = Einitial Einitial = 164
joule
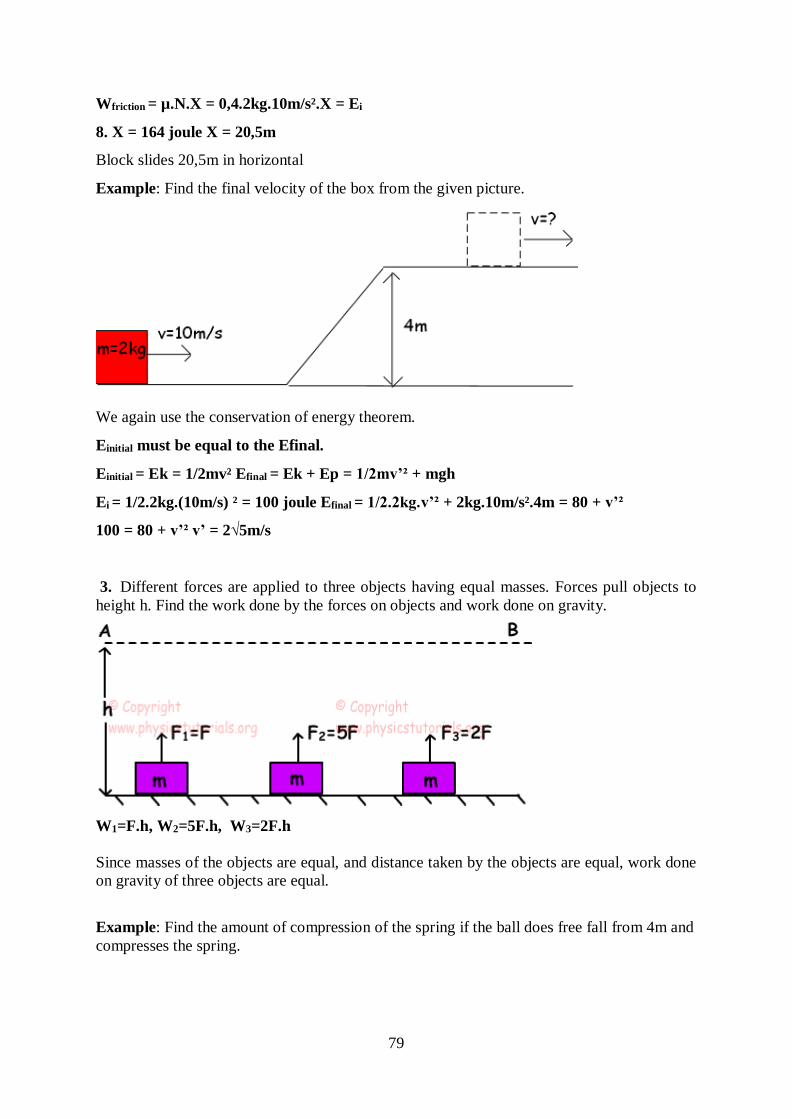
79
Wfriction = µ.N.X = 0,4.2kg.10m/s².X = Ei
8. X = 164 joule X = 20,5m
Block slides 20,5m in horizontal
Example: Find the final velocity of the box from the given picture.
We again use the conservation of energy theorem.
Einitial must be equal to the Efinal.
Einitial = Ek = 1/2mv² Efinal = Ek + Ep = 1/2mv’² + mgh
Ei = 1/2.2kg.(10m/s) ² = 100 joule Efinal = 1/2.2kg.v’² + 2kg.10m/s².4m = 80 + v’²
100 = 80 + v’² v’ = 2√5m/s
3. Different forces are applied to three objects having equal masses. Forces pull objects to
height h. Find the work done by the forces on objects and work done on gravity.
W1=F.h, W2=5F.h, W3=2F.h
Since masses of the objects are equal, and distance taken by the objects are equal, work done
on gravity of three objects are equal.
Example: Find the amount of compression of the spring if the ball does free fall from 4m and
compresses the spring.
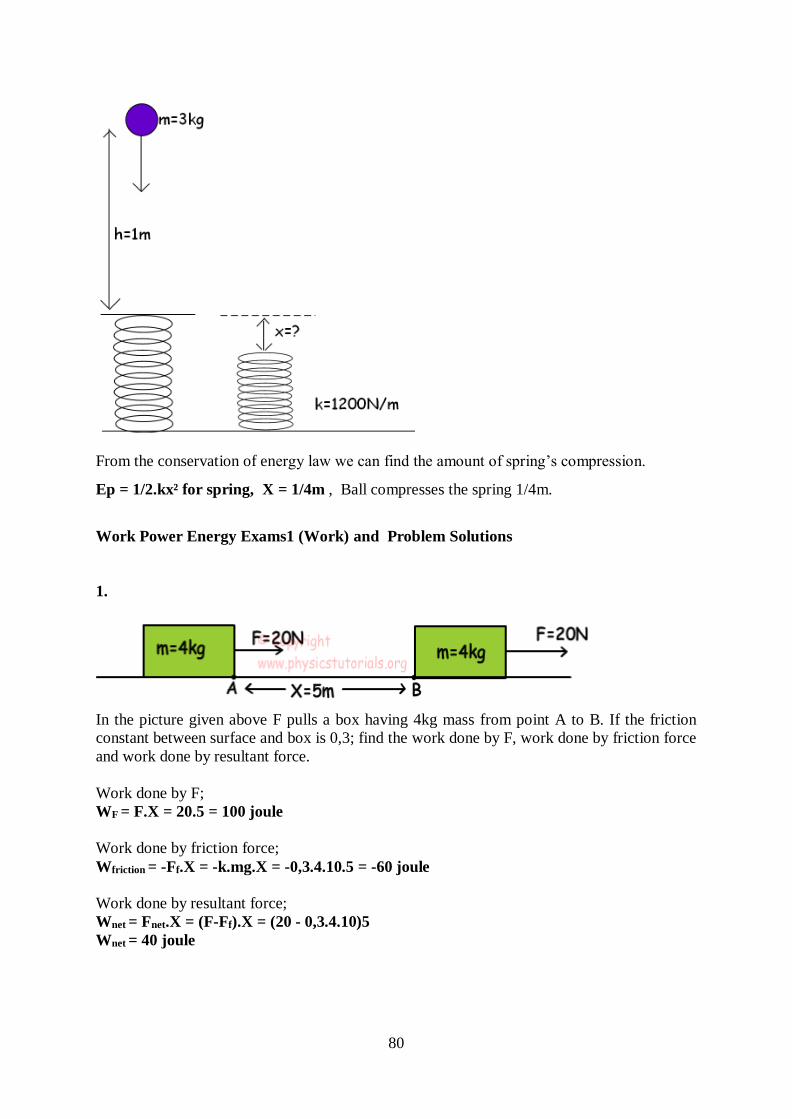
80
From the conservation of energy law we can find the amount of spring’s compression.
Ep = 1/2.kx² for spring, X = 1/4m , Ball compresses the spring 1/4m.
Work Power Energy Exams1 (Work) and Problem Solutions
1.
In the picture given above F pulls a box having 4kg mass from point A to B. If the friction
constant between surface and box is 0,3; find the work done by F, work done by friction force
and work done by resultant force.
Work done by F;
WF = F.X = 20.5 = 100 joule
Work done by friction force;
Wfriction = -Ff.X = -k.mg.X = -0,3.4.10.5 = -60 joule
Work done by resultant force;
Wnet = Fnet.X = (F-Ff).X = (20 - 0,3.4.10)5
Wnet = 40 joule
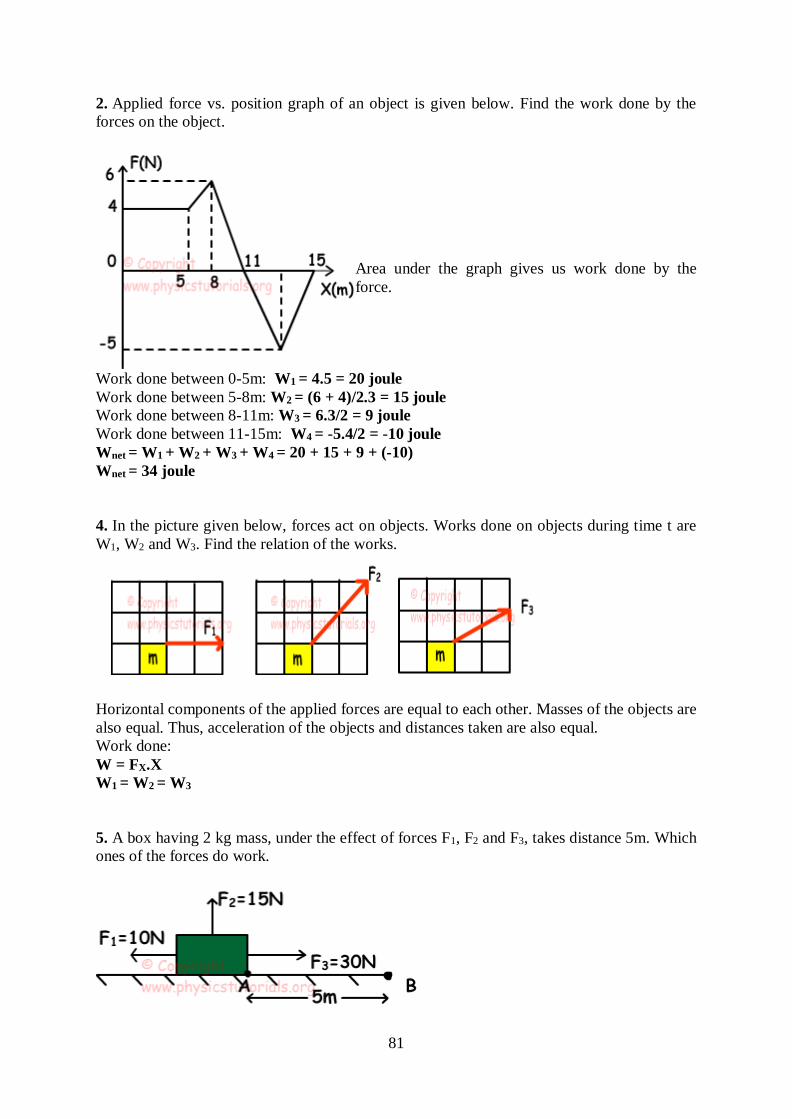
81
2. Applied force vs. position graph of an object is given below. Find the work done by the
forces on the object.
Area under the graph gives us work done by the
force.
Work done between 0-5m: W1 = 4.5 = 20 joule
Work done between 5-8m: W2 = (6 + 4)/2.3 = 15 joule
Work done between 8-11m: W3 = 6.3/2 = 9 joule
Work done between 11-15m: W4 = -5.4/2 = -10 joule
Wnet = W1 + W2 + W3 + W4 = 20 + 15 + 9 + (-10)
Wnet = 34 joule
4. In the picture given below, forces act on objects. Works done on objects during time t are
W1, W2 and W3. Find the relation of the works.
Horizontal components of the applied forces are equal to each other. Masses of the objects are
also equal. Thus, acceleration of the objects and distances taken are also equal.
Work done:
W = FX.X
W1 = W2 = W3
5. A box having 2 kg mass, under the effect of forces F1, F2 and F3, takes distance 5m. Which
ones of the forces do work.
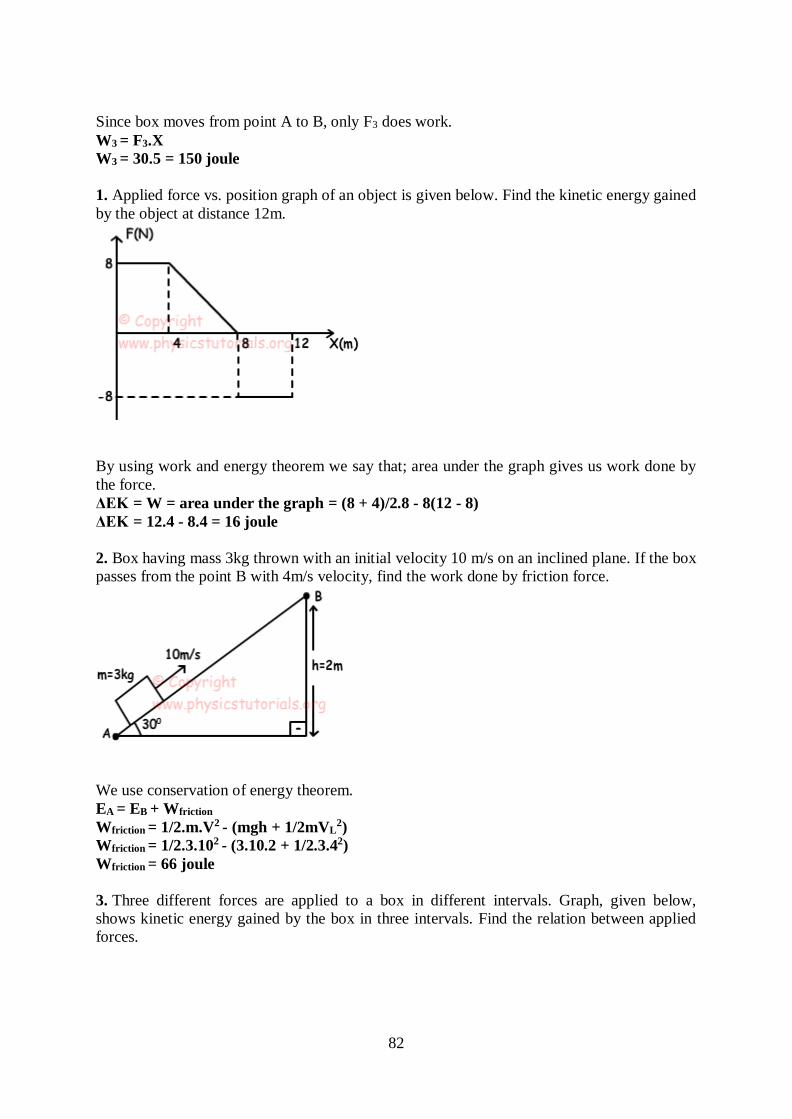
82
Since box moves from point A to B, only F3 does work.
W3 = F3.X
W3 = 30.5 = 150 joule
1. Applied force vs. position graph of an object is given below. Find the kinetic energy gained
by the object at distance 12m.
By using work and energy theorem we say that; area under the graph gives us work done by
the force.
ΔEK = W = area under the graph = (8 + 4)/2.8 - 8(12 - 8)
ΔEK = 12.4 - 8.4 = 16 joule
2. Box having mass 3kg thrown with an initial velocity 10 m/s on an inclined plane. If the box
passes from the point B with 4m/s velocity, find the work done by friction force.
We use conservation of energy theorem.
EA = EB + Wfriction
Wfriction = 1/2.m.V2 - (mgh + 1/2mVL2)
Wfriction = 1/2.3.102 - (3.10.2 + 1/2.3.42)
Wfriction = 66 joule
3. Three different forces are applied to a box in different intervals. Graph, given below,
shows kinetic energy gained by the box in three intervals. Find the relation between applied
forces.
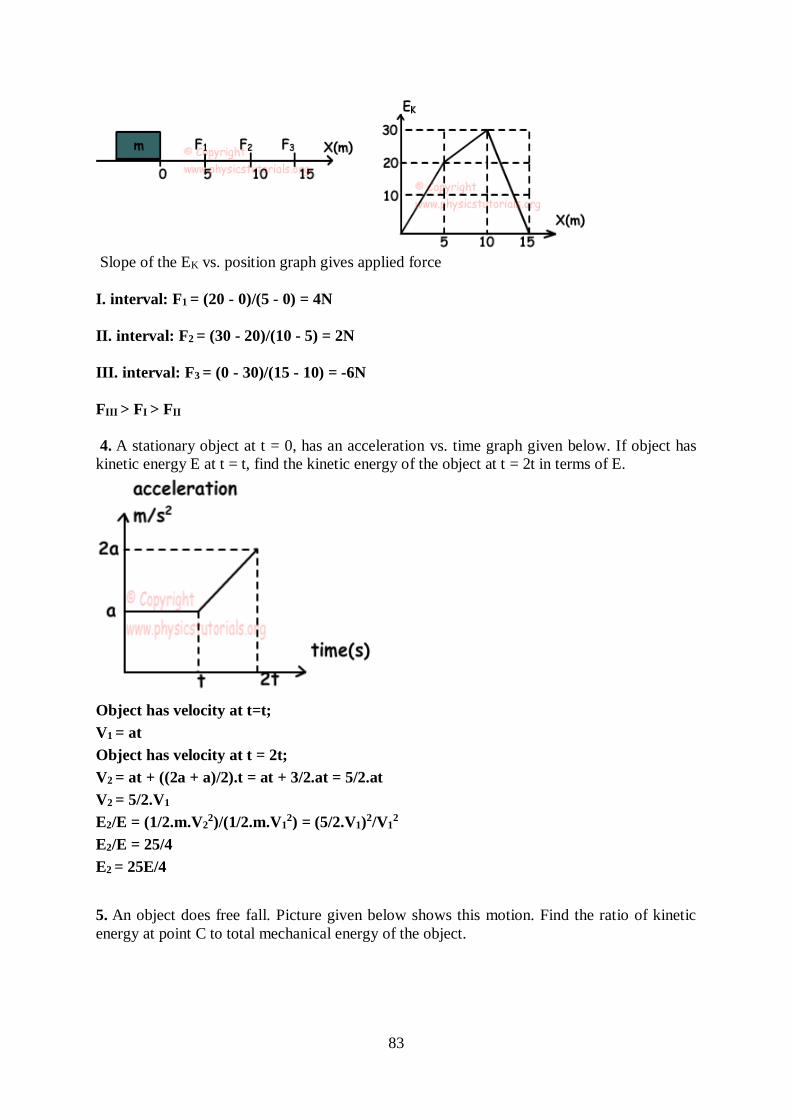
83
Slope of the EK vs. position graph gives applied force
I. interval: F1 = (20 - 0)/(5 - 0) = 4N
II. interval: F2 = (30 - 20)/(10 - 5) = 2N
III. interval: F3 = (0 - 30)/(15 - 10) = -6N
FIII > FI > FII
4. A stationary object at t = 0, has an acceleration vs. time graph given below. If object has
kinetic energy E at t = t, find the kinetic energy of the object at t = 2t in terms of E.
Object has velocity at t=t;
V1 = at
Object has velocity at t = 2t;
V2 = at + ((2a + a)/2).t = at + 3/2.at = 5/2.at
V2 = 5/2.V1
E2/E = (1/2.m.V22)/(1/2.m.V1
2) = (5/2.V1)2/V1
2
E2/E = 25/4
E2 = 25E/4
5. An object does free fall. Picture given below shows this motion. Find the ratio of kinetic
energy at point C to total mechanical energy of the object.
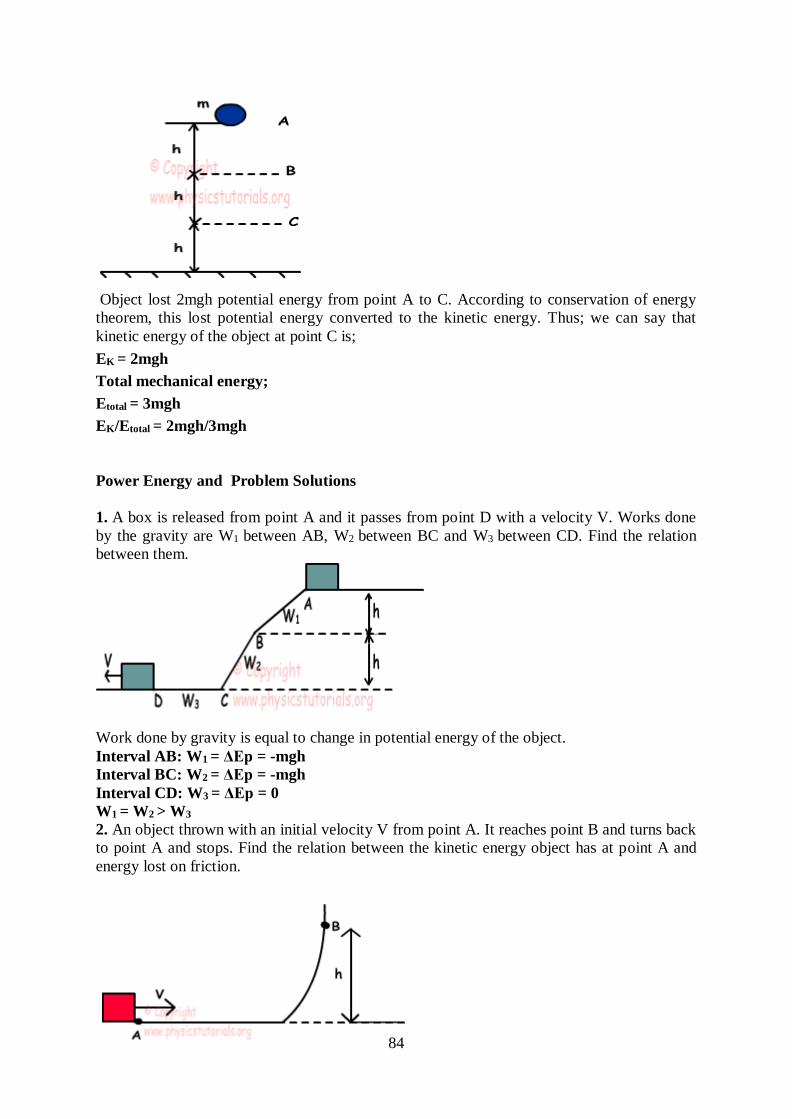
84
Object lost 2mgh potential energy from point A to C. According to conservation of energy
theorem, this lost potential energy converted to the kinetic energy. Thus; we can say that
kinetic energy of the object at point C is;
EK = 2mgh
Total mechanical energy;
Etotal = 3mgh
EK/Etotal = 2mgh/3mgh
Power Energy and Problem Solutions
1. A box is released from point A and it passes from point D with a velocity V. Works done
by the gravity are W1 between AB, W2 between BC and W3 between CD. Find the relation
between them.
Work done by gravity is equal to change in potential energy of the object.
Interval AB: W1 = ΔEp = -mgh
Interval BC: W2 = ΔEp = -mgh
Interval CD: W3 = ΔEp = 0
W1 = W2 > W3
2. An object thrown with an initial velocity V from point A. It reaches point B and turns back
to point A and stops. Find the relation between the kinetic energy object has at point A and
energy lost on friction.
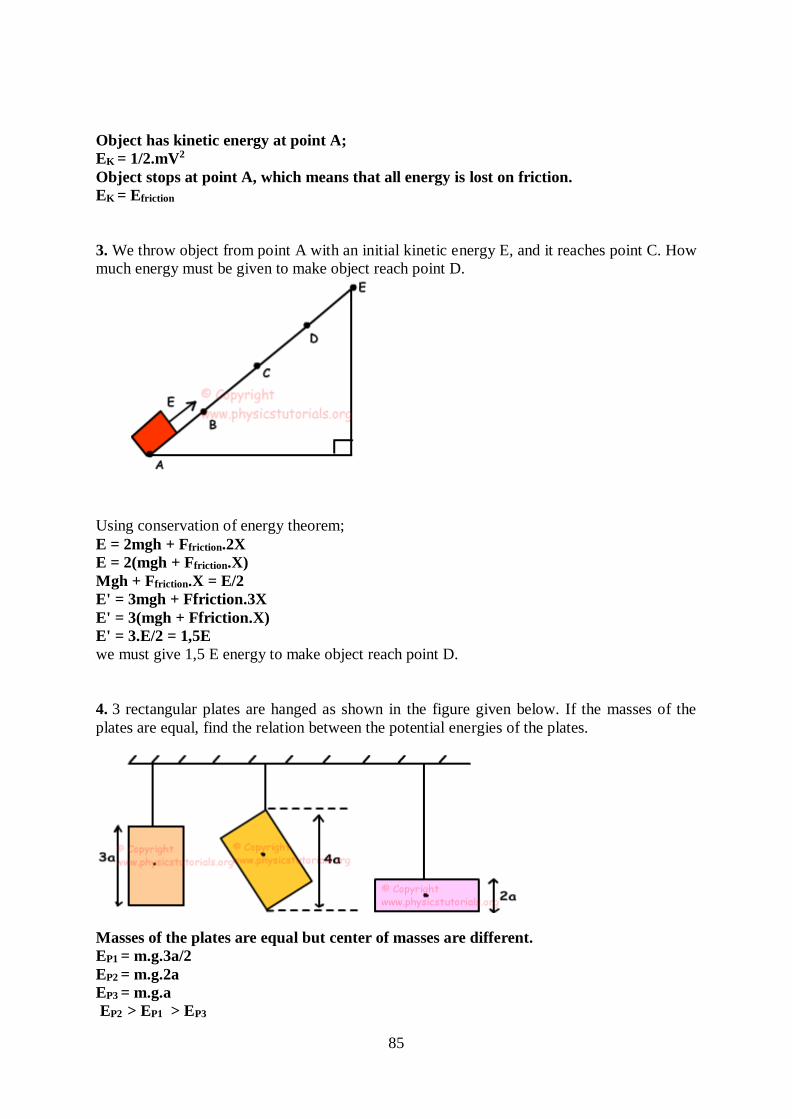
85
Object has kinetic energy at point A;
EK = 1/2.mV2
Object stops at point A, which means that all energy is lost on friction.
EK = Efriction
3. We throw object from point A with an initial kinetic energy E, and it reaches point C. How
much energy must be given to make object reach point D.
Using conservation of energy theorem;
E = 2mgh + Ffriction.2X
E = 2(mgh + Ffriction.X)
Mgh + Ffriction.X = E/2
E' = 3mgh + Ffriction.3X
E' = 3(mgh + Ffriction.X)
E' = 3.E/2 = 1,5E
we must give 1,5 E energy to make object reach point D.
4. 3 rectangular plates are hanged as shown in the figure given below. If the masses of the
plates are equal, find the relation between the potential energies of the plates.
Masses of the plates are equal but center of masses are different.
EP1 = m.g.3a/2
EP2 = m.g.2a
EP3 = m.g.a
EP2 > EP1 > EP3
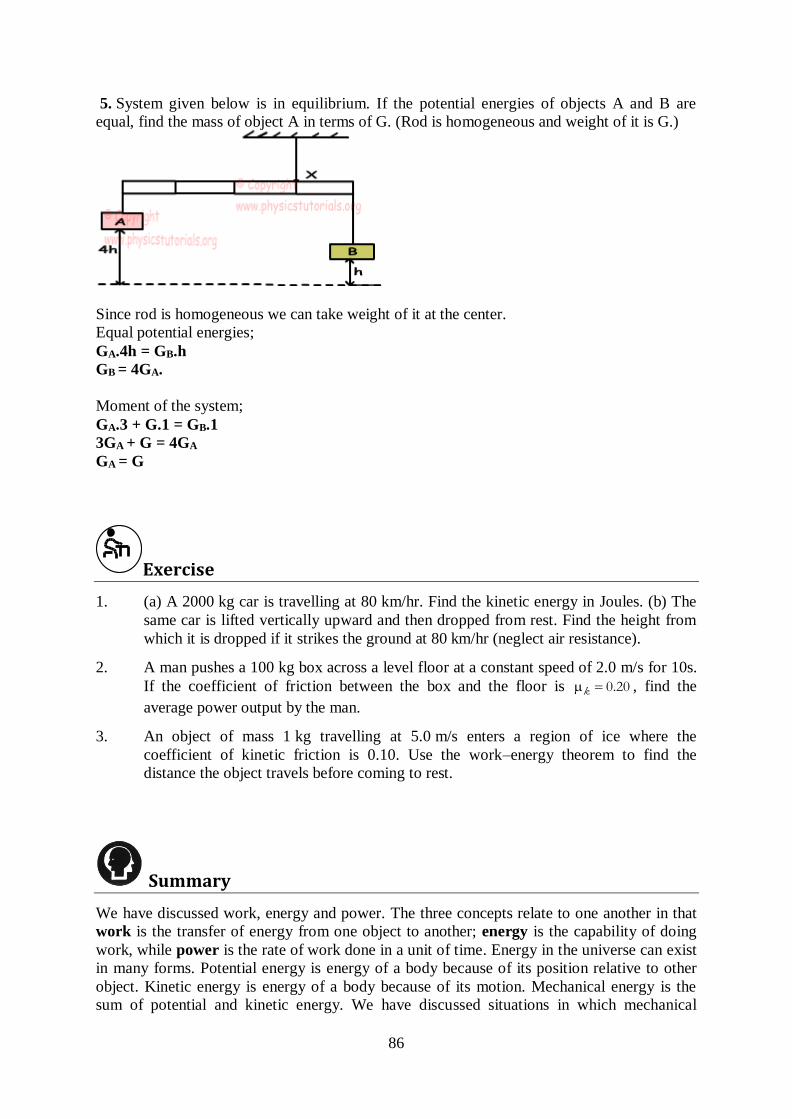
86
5. System given below is in equilibrium. If the potential energies of objects A and B are
equal, find the mass of object A in terms of G. (Rod is homogeneous and weight of it is G.)
Since rod is homogeneous we can take weight of it at the center.
Equal potential energies;
GA.4h = GB.h
GB = 4GA.
Moment of the system;
GA.3 + G.1 = GB.1
3GA + G = 4GA
GA = G
Exercise 1. (a) A 2000 kg car is travelling at 80 km/hr. Find the kinetic energy in Joules. (b) The
same car is lifted vertically upward and then dropped from rest. Find the height from
which it is dropped if it strikes the ground at 80 km/hr (neglect air resistance).
2. A man pushes a 100 kg box across a level floor at a constant speed of 2.0 m/s for 10s.
If the coefficient of friction between the box and the floor is 0.20k , find the
average power output by the man.
3. An object of mass 1 kg travelling at 5.0 m/s enters a region of ice where the
coefficient of kinetic friction is 0.10. Use the work–energy theorem to find the
distance the object travels before coming to rest.
Summary
We have discussed work, energy and power. The three concepts relate to one another in that
work is the transfer of energy from one object to another; energy is the capability of doing
work, while power is the rate of work done in a unit of time. Energy in the universe can exist
in many forms. Potential energy is energy of a body because of its position relative to other
object. Kinetic energy is energy of a body because of its motion. Mechanical energy is the
sum of potential and kinetic energy. We have discussed situations in which mechanical
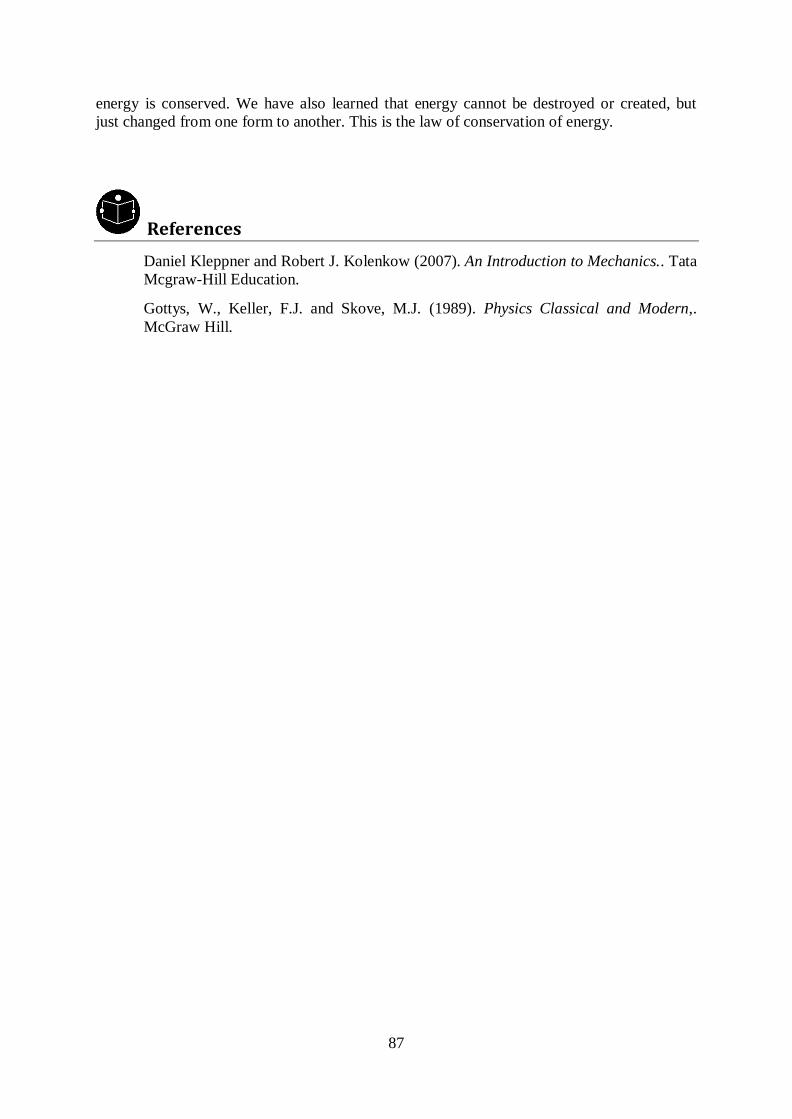
87
energy is conserved. We have also learned that energy cannot be destroyed or created, but
just changed from one form to another. This is the law of conservation of energy.
References
Daniel Kleppner and Robert J. Kolenkow (2007). An Introduction to Mechanics.. Tata
Mcgraw-Hill Education.
Gottys, W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,.
McGraw Hill.

88
Lecture 7: Uniform Circular Motion
7.1 Introduction
If a particle is moving in a circle or circular arc of radius r with constant velocity v, it
experiences the centripetal acceleration.
2v
ar
… (1.22)
The velocity vector is tangential to the circle in the direction of motion while the acceleration
is always directed radially inwards.
Arising from the centripetal acceleration is a centripetal force whose magnitude is
2mv
F mar
…(1.23)
Both the centripetal acceleration and the centripetal force are vectors whose magnitudes are
constants but their directions are changing continuously so as to point towards the centre of
the circle.
Figure 1.10: An Illustration of Directions of Instantaneous Velocity and
Acceleration in Circular Motion
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Describe important concepts regarding the universe and the gravitational force.
ii. Determine forces acting on a free-body.
iii. State the Kepler’s Law and explain its applications.
iv. Discuss a variety of mathematical equations which describe the motion of
satellites.
v. Explain the concept of weightlessness
7.2 False Sensation of an Outward Force
The tendency of our body to maintain its state of rest or motion while the surroundings (the
car) accelerate is often misconstrued as acceleration. This becomes particularly problematic

89
when we consider the inertia experience of a passenger in a moving car and making the right-
hand turn.
Suppose as you continue driving and suddenly you have to make a sharp turn to the right at
constant speed. During the turn, the car travels in a circular-type path and sweeps out one-
quarter of a circle. The unbalanced force acting upon the turned wheels of the car cause an
unbalanced force upon the car and a subsequent acceleration. The unbalanced force and the
acceleration are both directed towards the centre of the circle about which the car is turning.
This is the centripetal force and acceleration. Your body, however, is in motion and tends to
stay in motion. It is the inertia of your body – the tendency to resist acceleration – which
causes it to continue in its forward motion. While the car is accelerating inward, you continue
in a straight line. If you are sitting on the passenger side of the car, then eventually the outside
door of the car will hit you as the car turns inward. This phenomenon might cause you to
think that you were being accelerated outwards away from the centre of the circle. In reality,
you are continuing in your straight-line inertial path tangent to the circle while the car is
accelerating out from under you.
The sensation of an outward force and an outward acceleration is a false sensation. There is
no physical object capable of pushing you outwards. You are merely experiencing the
tendency of your body to continue in its path tangent to the circular path along which the car
is turning.
Activity 6
1. A 900 kg car moving at 10 m/s takes a turn around a circle with radius R = 25.0
m. Determine the acceleration and the net force acting upon the car.
2. A 95 kg athlete makes a quarter circle turn in 2.1 seconds. If the radius of the
circle R = 12 m, determine the speed, acceleration and the net force acting upon
the athlete.
Example: A 900 kg car makes a 180 turn with a speed of 10.0 m/s. The radius of the circle
through which the car is turning is 25.0 m. Determine the force of friction and the coefficient
of friction acting upon the car.
Solution:
Known Information:
m = 900 kg, v = 10.0 m/s and R = 25.0 m
The mass of the object can be used to determine the force of gravity acting in the downward
direction.
gravF mg
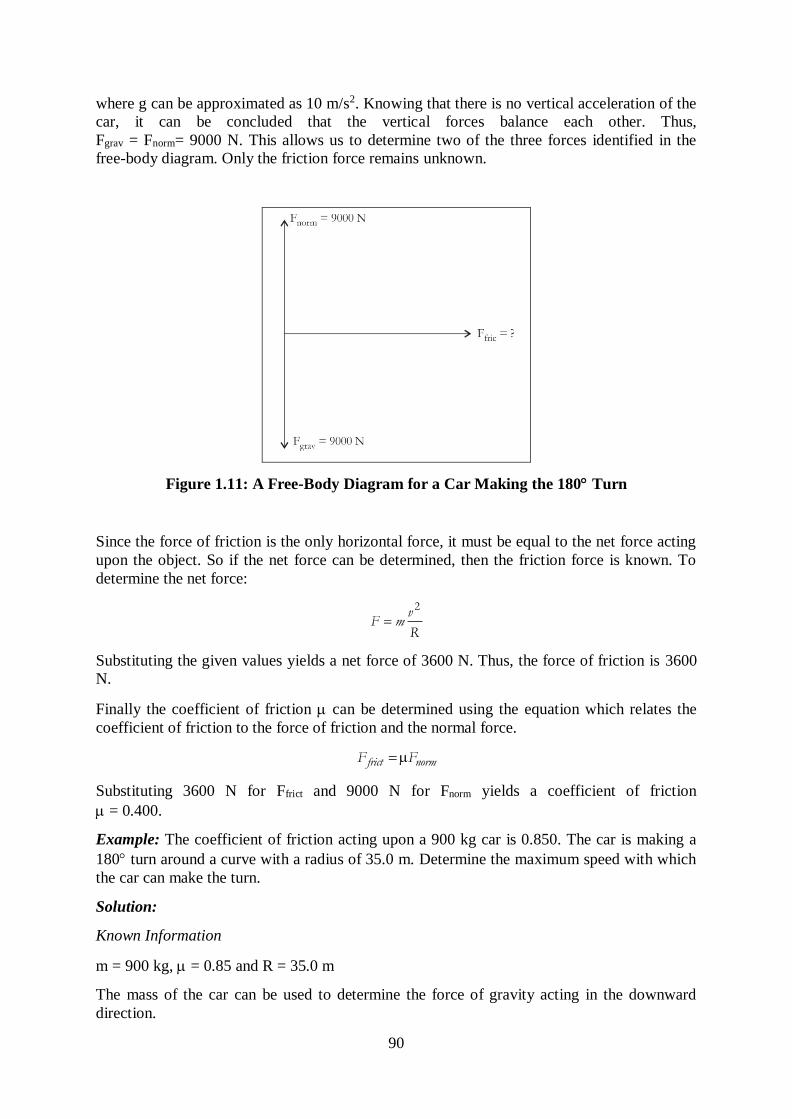
90
where g can be approximated as 10 m/s2. Knowing that there is no vertical acceleration of the
car, it can be concluded that the vertical forces balance each other. Thus,
Fgrav = Fnorm= 9000 N. This allows us to determine two of the three forces identified in the
free-body diagram. Only the friction force remains unknown.
Figure 1.11: A Free-Body Diagram for a Car Making the 180 Turn
Since the force of friction is the only horizontal force, it must be equal to the net force acting
upon the object. So if the net force can be determined, then the friction force is known. To
determine the net force:
2v
F mR
Substituting the given values yields a net force of 3600 N. Thus, the force of friction is 3600
N.
Finally the coefficient of friction can be determined using the equation which relates the
coefficient of friction to the force of friction and the normal force.
frict normF F
Substituting 3600 N for Ffrict and 9000 N for Fnorm yields a coefficient of friction
= 0.400.
Example: The coefficient of friction acting upon a 900 kg car is 0.850. The car is making a
180 turn around a curve with a radius of 35.0 m. Determine the maximum speed with which
the car can make the turn.
Solution:
Known Information
m = 900 kg, = 0.85 and R = 35.0 m
The mass of the car can be used to determine the force of gravity acting in the downward
direction.
91
Fgrav = m g
where g can be approximated as 10 m/s/s. Knowing that there is no vertical acceleration of
the car, it can be concluded that the vertical forces balance each other.
Thus,
Fgrav = Fnorm= 9000 N.
Since the coefficient of friction is given, the force of friction can be determined.
frict normF F
This allows us to determine all three forces identified in the free-body diagram. The net force
acting upon any object is the vector sum of all individual forces acting upon that object. Thus
if all individual force values are known (as is the case here), the net force can be calculated.
The vertical forces add to 0 N. Since the force of friction is the only horizontal force, it must
be equal to the net force acting upon the object. Thus,
Fnet = 7650 N
Once the net force is determined, the acceleration can be quickly calculated using the
equation:
Fnet = ma
Substituting the given values yields an acceleration of 7.65 m/s2. Finally, the speed at which
the car could travel around the turn can be calculated using the equation for centripetal
acceleration:
2v
aR
Substituting the known values for a and R into this equation and solving algebraically yields
a maximum speed of 16.4 m/s.
7.3 The Universe and the Gravitational Force
The following section discusses important concepts regarding the universe and the
gravitational force.
Structure of the Universe
Starting at home on planet Earth our immediate neighbours are the planets Mars and Venus.
Next nearest neighbours are planets Jupiter and Mercury. There are four other planets which
revolve around the Sun. This is our Solar system at the centre of which is the Sun.
Beyond the solar system, we have a collection of stars, 100s of millions which together form
the Milky Way Galaxy.
The Milky Way galaxy is disc-shaped and our Sun is 26,000 light years from its centre.
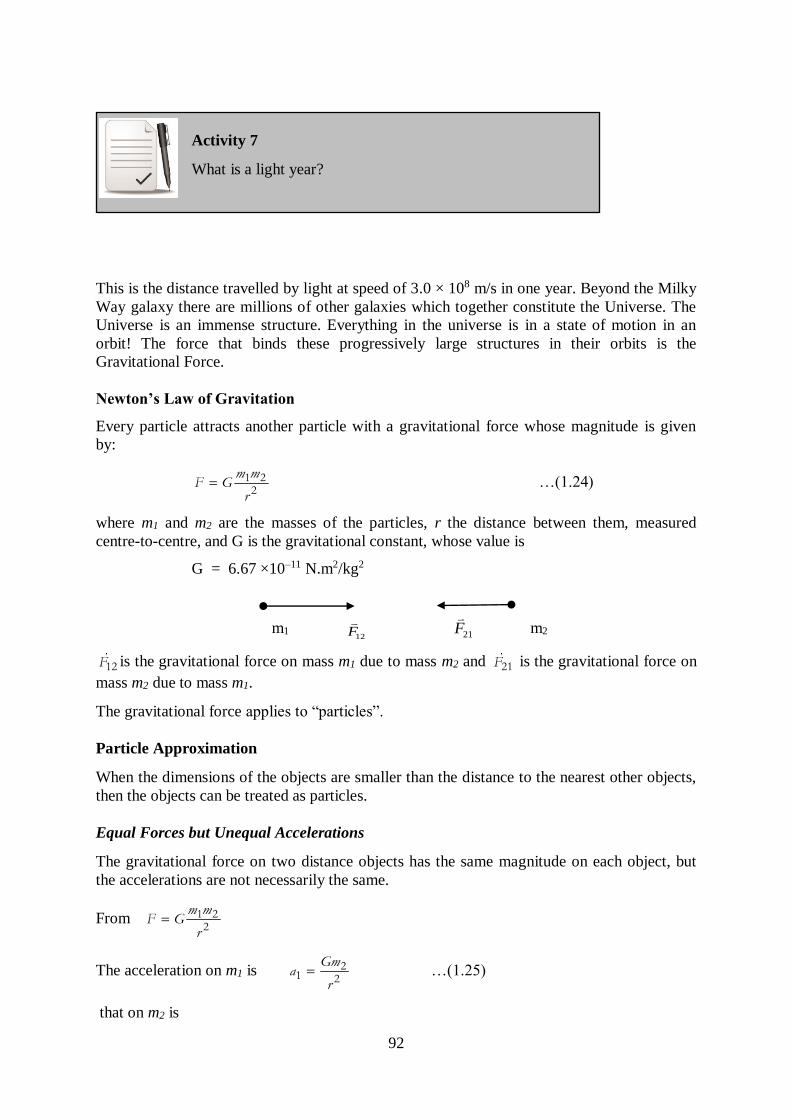
92
Activity 7
What is a light year?
This is the distance travelled by light at speed of 3.0 × 108 m/s in one year. Beyond the Milky
Way galaxy there are millions of other galaxies which together constitute the Universe. The
Universe is an immense structure. Everything in the universe is in a state of motion in an
orbit! The force that binds these progressively large structures in their orbits is the
Gravitational Force.
Newton’s Law of Gravitation
Every particle attracts another particle with a gravitational force whose magnitude is given
by:
1 22
m mF G
r …(1.24)
where m1 and m2 are the masses of the particles, r the distance between them, measured
centre-to-centre, and G is the gravitational constant, whose value is
G = 6.67 ×10–11 N.m2/kg2
m1 12F
21F
m2
12F is the gravitational force on mass m1 due to mass m2 and 21F is the gravitational force on
mass m2 due to mass m1.
The gravitational force applies to “particles”.
Particle Approximation
When the dimensions of the objects are smaller than the distance to the nearest other objects,
then the objects can be treated as particles.
Equal Forces but Unequal Accelerations
The gravitational force on two distance objects has the same magnitude on each object, but
the accelerations are not necessarily the same.
From 1 22
m mF G
r
The acceleration on m1 is 21 2
Gma
r …(1.25)
that on m2 is
93
12 2
Gma
r …(1.26)
Gravitation and the Principle of Superposition
Given a group of particles, the gravitational force exerted on any one of the particles is the
vector sum of the individual gravitational forces on the particle.
For n interacting particles, the net force on particle 1:
1 12 13 1............... nF F F F
where 12F is the gravitational force on particle 1 due to particle 2, etc.
or simply:
1 1
2
n
i
i
F F …(1.27)
Example: Determine the force of gravitational attraction between the Earth (m = 5.98 × 1024
kg) and a 70 kg student if
(a) the student is standing at sea level, a distance of 6.37 × 106 m from the Earth’s centre
and
(b) the student is in an airplane at 40,000 feet above Earth’s surface. This would place the
student a distance of 6.38 × 106 m from Earth’s centre.
Solution:
(a) The solution of the problem involves substituting known values of G = 6.67 × 10–11
Nm2/kg2, m1 = 5.98 × 1024 kg, m2 = 70 kg and r = 6.37 × 106 m into the universal
gravitation equation and solving for Fgrav. The solution is as follows:
11 24
6 2
6.67 10 5.98 10 70688.1
6.37 10 6.37 10gravF N
(b) The solution of the problem involves substituting known values of G = 6.67 × 10–11
Nm2/kg2, m1 = 5.98 × 1024 kg, m2 = 70 kg) and r = 6.38 × 106 m into the universal
gravitation equation and solving for Fgrav. The solution is as follows:
11 24
2 2
6.67 10 5.98 10 70685.9
6.38 10 6.38 10gravF N
Two general conceptual comments can be made about the results of the two worked solutions
above. First, observe that the force of gravity acting upon the student is less on an airplane at
40,000 feet than at sea level. This illustrates the inverse relationship between separation
distance and the force of gravity (or in this case, the weight of the student). The student
weighs less at the higher altitude. However, a mere change of 40,000 feet further from the
centre of the Earth is virtually negligible. This altitude change altered the student's weight by
3N, which is less than 1% of the original weight. A distance of 40,000 feet (from the Earth’s
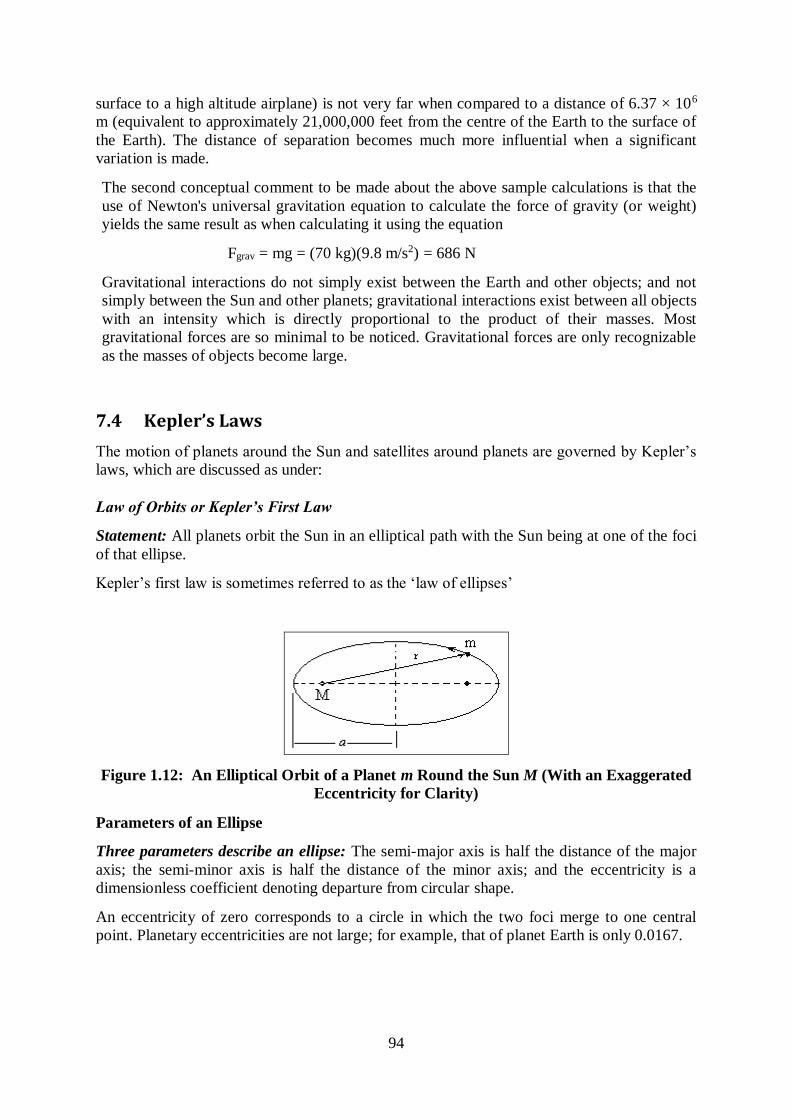
94
surface to a high altitude airplane) is not very far when compared to a distance of 6.37 × 106
m (equivalent to approximately 21,000,000 feet from the centre of the Earth to the surface of
the Earth). The distance of separation becomes much more influential when a significant
variation is made.
The second conceptual comment to be made about the above sample calculations is that the
use of Newton's universal gravitation equation to calculate the force of gravity (or weight)
yields the same result as when calculating it using the equation
Fgrav = mg = (70 kg)(9.8 m/s2) = 686 N
Gravitational interactions do not simply exist between the Earth and other objects; and not
simply between the Sun and other planets; gravitational interactions exist between all objects
with an intensity which is directly proportional to the product of their masses. Most
gravitational forces are so minimal to be noticed. Gravitational forces are only recognizable
as the masses of objects become large.
7.4 Kepler’s Laws
The motion of planets around the Sun and satellites around planets are governed by Kepler’s
laws, which are discussed as under:
Law of Orbits or Kepler’s First Law
Statement: All planets orbit the Sun in an elliptical path with the Sun being at one of the foci
of that ellipse.
Kepler’s first law is sometimes referred to as the ‘law of ellipses’
Figure 1.12: An Elliptical Orbit of a Planet m Round the Sun M (With an Exaggerated
Eccentricity for Clarity)
Parameters of an Ellipse
Three parameters describe an ellipse: The semi-major axis is half the distance of the major
axis; the semi-minor axis is half the distance of the minor axis; and the eccentricity is a
dimensionless coefficient denoting departure from circular shape.
An eccentricity of zero corresponds to a circle in which the two foci merge to one central
point. Planetary eccentricities are not large; for example, that of planet Earth is only 0.0167.
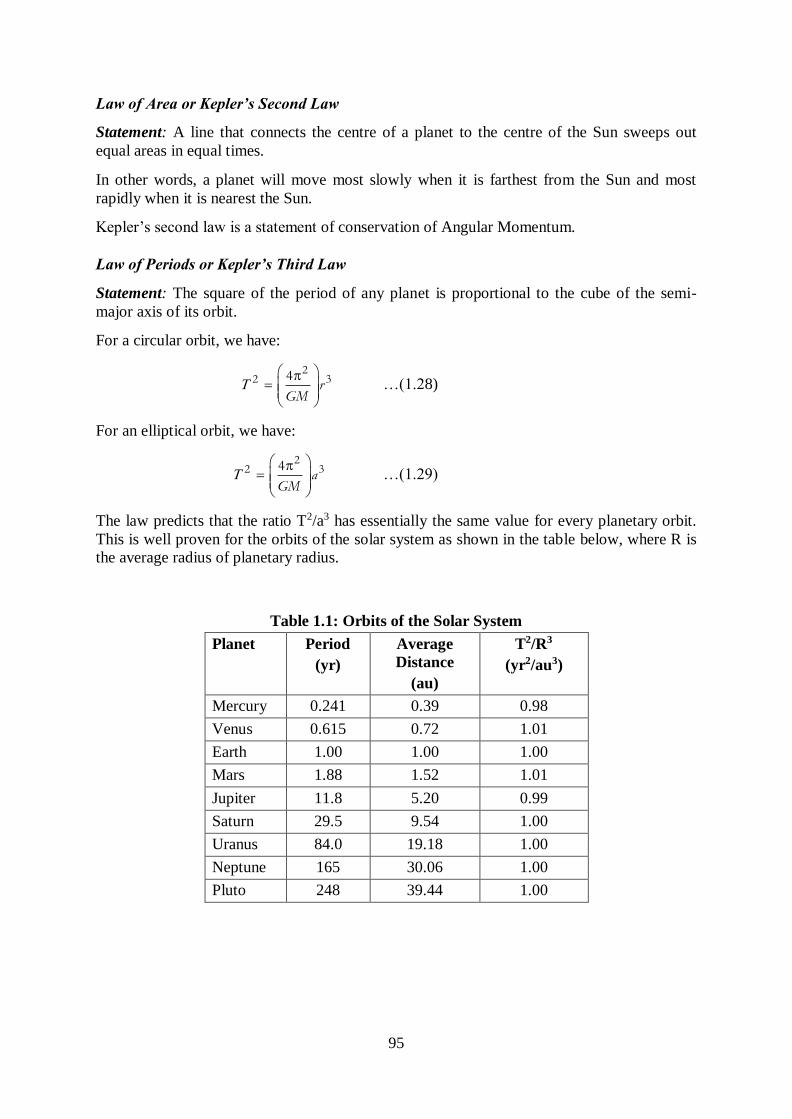
95
Law of Area or Kepler’s Second Law
Statement: A line that connects the centre of a planet to the centre of the Sun sweeps out
equal areas in equal times.
In other words, a planet will move most slowly when it is farthest from the Sun and most
rapidly when it is nearest the Sun.
Kepler’s second law is a statement of conservation of Angular Momentum.
Law of Periods or Kepler’s Third Law
Statement: The square of the period of any planet is proportional to the cube of the semi-
major axis of its orbit.
For a circular orbit, we have:
22 34
rGM
…(1.28)
For an elliptical orbit, we have:
22 34
aGM
…(1.29)
The law predicts that the ratio T2/a3 has essentially the same value for every planetary orbit.
This is well proven for the orbits of the solar system as shown in the table below, where R is
the average radius of planetary radius.
Table 1.1: Orbits of the Solar System
Planet Period
(yr)
Average
Distance
(au)
T2/R3
(yr2/au3)
Mercury 0.241 0.39 0.98
Venus 0.615 0.72 1.01
Earth 1.00 1.00 1.00
Mars 1.88 1.52 1.01
Jupiter 11.8 5.20 0.99
Saturn 29.5 9.54 1.00
Uranus 84.0 19.18 1.00
Neptune 165 30.06 1.00
Pluto 248 39.44 1.00
96
Take Note
The average distance is given in astronomical units where 1 au is equal to the distance
from the Earth to the Sun which is 1.4957 × 1011 m. The orbital period is given in units
of Earth-years where 1 Earth-year is the time required for the Earth to orbit the Sun,
3.156 × 107 seconds.
The equivalence of the ratio T2/a3 among planets has consequently leaded to Kepler’s third
law being sometimes referred to as the Law of Harmonies.
7.5 Planetary and Satellite Motion
The motion of objects is governed by Newton's laws. The same simple laws which govern the
motion of objects on Earth also extend to the heavens to govern the motion of planets, moons,
and other satellites. In this section, we will be concerned with the variety of mathematical
equations which describe the motion of satellites.
Consider a satellite with mass Msat orbiting a central body with a mass, m = MCentral. The
central body could be a planet, the Sun or some other large mass capable of causing sufficient
acceleration on a less massive nearby object. If the satellite moves in a circular motion, then
the net centripetal force acting upon this orbiting satellite is given by the relationship
2
satnet
M vF
R
This net centripetal force is the result of the gravitational force which attracts the satellite
towards the central body and can be represented as:
2
sat centralgrav
GM MF
R
Since Fgrav = Fnet, the above expressions for centripetal force and gravitational force are
equal. Thus,
2
2sat sat centralM v GM M
R R
2 centralGMv
R
The velocity of a satellite moving about a central body in circular motion is given by:
centralGMv
R
where G = 6.67 × 10–11 N m2/kg2, Mcentral = the mass of the central body about which the
satellite orbits, and R = the radius of orbit for the satellite.

97
Similar reasoning can be used to determine an equation for the acceleration of our satellite
that is expressed in terms of masses and radius of orbit. The acceleration of a satellite is equal
to the acceleration of gravity of the satellite at whatever location which is given by:
2centralGM
gR
Thus, the acceleration of a satellite in a circular motion about some central body is given by
the following equation:
2centralGM
aR
…(1.30)
where G = 6.67 × 10–11 Nm2/kg2, Mcentral = the mass of the central body about which the
satellite orbits, and R = the average radius of orbit for the satellite. The final equation which
is useful in describing the motion of satellites is Newton's form of Kepler's third law.
Consider a planet with mass Mplanet orbiting in nearly circular motion around the Sun of mass
MSun. The net centripetal force acting upon this orbiting planet is given by the relationship
2planet
net
M vF
R
This net centripetal force is the result of the gravitational force which attracts the planet
towards the Sun and can be represented as:
2
planet sungrav
GM MF
R …(1.31)
Since Fgrav = Fnet, the above expressions for centripetal force and gravitational force are equal.
Thus,
2
2
planet planet sunM v GM M
R R …(1.32)
Since the velocity of an object in nearly circular orbit can be approximated as
2 R
vT
…(1.33)
2 22
2
4 Rv
T
Substitution of the expression for v2 into the equation (1.32) above yields,
2
2 2
4planet planet sunM R GM M
T R
By cross-multiplication, the equation can be transformed into
22
3
4planet
planet sun
MT
GM MR

98
Which upon simplification yields
2 2
3
4
sun
T
GMR …(134)
The right side of the above equation will be the same value for every planet regardless of the
planet's mass. Subsequently, it is reasonable that the T2/R3 ratio would be the same value for
all planets if the force which holds the planets in their orbits is the force of gravity. Newton's
universal law of gravitation provided a theoretical explanation for Kepler's Law of
Harmonies.
Hence, the period of a satellite (T) and the mean distance from the central body (R) are
related by the following equation:
2 2
3
4
central
T
GMR .... (vi)
where T = the period of the satellite, R = the average radius of orbit for the satellite (distance
from centre of central planet), and G = 6.67 × 10–11 Nm2/kg2.
There is an important concept evident in all three of these equations – the period [Equation
(13.5)], speed [Equation (1.33)] and the acceleration [Equation (130)] of an orbiting satellite
are not dependent upon the mass of the satellite.
centralGMv
R
2centralGM
aR
2 2
3
4
central
T
GMR
To illustrate the usefulness of the above equations, consider the following worked examples.
Example: A satellite wishes to orbit the Earth at a height of 100 km (approximately 60 miles)
above the surface of the Earth. Determine the speed, acceleration and orbital period of the
satellite. (Given: Mearth = 5.98 × 1024 kg, Rearth = 6.37 × 106 m)
Solution:
Given data:
R = rearth + height = 6.47 × 106 m, Mearth = 5.98 × 1024 kg and G = 6.67 × 10-11 N m2/kg2
Note that the radius of a satellite's orbit can be found from the knowledge of the Earth’s
radius and the height of the satellite above the Earth.
As shown in the diagram at the right, the radius of orbit for a satellite is equal to the sum of
the Earth’s radius and the height above the Earth. These two quantities can be added to yield
the orbital radius. In this problem, the 100 km must first be converted to 1,00,000 m before
being added to the radius of the Earth. The equations needed to determine the unknown are
those which are listed above. We will begin by determining the orbital speed of the satellite
using the following equation:
/Centralv GM R
which upon substitution yields
99
v = 6.16 × 107 m/s
The acceleration can be found from either one of the following equations (1.30) or from
2 /a v R
Either equation can be used to calculate the acceleration and yields
a = 9.53 m/s2
Observe that this acceleration is slightly less than the 9.8 m/s2 value expected on Earth’s
surface. The increased distance from the centre of the Earth lowers the value of g.
Finally, the period can be calculated using Equation (1.35) and yields:
T = 5177 s = 1.44 hrs
Example: The period of the Moon is approximately 27.2 days (2.35 × 106 s). Determine the
radius of the Moon's orbit and the orbital speed of the Moon. (Given: Mearth = 5.98 × 1024 kg,
Rearth = 6.37 × 106 m)
Solution:
Given data
T = 2.35 × 106 s, Mearth = 5.98 × 1024 kg and G = 6.67 × 10-11 N m2/kg2
The radius of orbit can be calculated Equation (1.33):
R3 = 5.58 × 1025 m3
By taking the cube root of 5.58 × 1025 m3, the radius can be determined to be:
R = 3.82 × 108 m
The orbital speed of the satellite can be computed from Equation (1.33) which upon
substitution yields
v = 1.02 × 103 m/s
Example: A geosynchronous satellite is a satellite which remains above the same point on the
Earth. A geosynchronous satellite orbits the Earth with an orbital period of 24 hours, thus
matching the period of the Earth’s rotational motion. If a satellite has to orbit the Earth at the
equator in 24 hours (86400 s), then how high above the Earth’s surface must it be located?
(Given: Mearth = 5.98 × 1024 kg, Rearth = 6.37 × 106 m).
Solution
Given data
T = 86400 s, Mearth = 5.98 × 024 kg, Rearth = 6.37 × 106 m and G = 6.67 ×10–11 N m2/kg2.
The radius of orbit can be found using Eq.(vi) which upon substitution yields:
R3 = [((86400 s)2 × (6.67 × 0–11 N m2/kg2) × (5.98×024 kg) ) / (4× (3.1415)2)]
R3 = 7.54 ×1022 m3.
By taking the cube root of 7.54 ×1022 m3, the radius becomes R = 4.23 × 107 m.
100
The radius of orbit indicates the distance which the satellite is from the centre of the Earth.
Now that the radius of orbit has been found, the height above the Earth can be calculated.
Since the Earth’s surface is 6.37 × 106 m from its centre (that's the radius of the Earth), the
satellite must be a height of
4.23 ×107 m – 6.37 × 106 m = 3.59 × 107 m
above the surface of the Earth. So the height of the satellite is 3.59 × 107 m.
7.6 Weightlessness
Weightlessness is simply a sensation experienced by an individual when there are no external
objects touching one's body and exerting a push or pull upon it. Weightless sensations exist
when all contact forces are removed. These sensations are common to any situation in which
you are momentarily (or perpetually) in a state of free fall. When in free fall, the only force
acting upon your body is the force of gravity – a non-contact force.
Weightlessness is only a sensation; it is not a reality corresponding to an individual who has
lost weight.
Earth-orbiting astronauts are weightless because there is no external contact force pushing or
pulling upon their body. Gravity is the only force acting upon their body. Being an action-at-
a-distance force, it cannot be felt and, therefore, would not provide any sensation of their
weight.
It is the force of gravity which supplies the centripetal force requirement to allow the inward
acceleration which is characteristic of circular motion. The force of gravity is the only force
acting upon their body. The astronauts are in free-fall. The astronauts and all their
surroundings, i.e. the space shuttle with its contents are falling towards the Earth without
colliding into it. Their tangential velocity allows them to remain in orbital motion while the
force of gravity pulls them inward.
Activity 8
David stands on a bathroom scale and reads the scale while in an elevator
ascending and descending a tall building. David weighs 1000 N, but notices
that the scale readings depend on what the elevator is doing. Use a free-
body diagram and Newton's second law of motion to solve the following
problems.
(a) What is the scale reading when David accelerates upwards at 0.50
m/s2?
(b) What is the scale reading when David is travelling upward at a
constant velocity of at 2 m/s?
(c) As David approaches the top of the building, the elevator slows
down at a rate of 0.50 m/s2. What does the scale read?
101
Exercise 1. A bicycle wheel of radius r = 1.5m starts from rest and rolls 100m without slipping in
30s. Calculate:
(a) The number of revolutions the wheel makes
(b) The number of radians through which it turns
(c) The average angular velocity.
2. The escape velocity of any object is the speed it must achieve to escape the
gravitational pull of the Earth. Calculate the escape velocity for an object of mass m.
3. What is the relationship between the radius of orbit of a satellite mass m and its
period?
4. What is the gravitational field (in N/kg) 2.74 Earth radii above the Earth's surface?
5. What is the gravitational field (in N/kg) 4027 km above a planet with a mass of 7.04 x
1022 kg and a radius of 1.84 x 106 m?
6. An astronaut standing on the surface of the moon launches a projectile straight up
from the surface. What should the initial speed (in m/s) of the projectile be so that it
will reach a height of 1.99 x 106m above the moon's surface? (The moon's mass is
7.35 x 1022 kg and its radius is 1.74 x 106 m.)
7. What is the escape velocity (in m/s) from a planet with a radius of 1.81 x 106 m and a
mass of 7.23 x 1022 kg?
8. How much work (in kJ) is done lifting a 267 kg payload from the Earth's surface to a
height of 17.3 m above the Earth's surface? (The mass of the Earth is 5.98 x 1024 kg
and the Earth's radius is 6.38 x 106 m.)
9. How much work (in MJ) is done to raise a 370 kg payload from Earth's surface to a
height of 4.18 x 106 m above the Earth's surface? (The mass of the Earth is 5.98 x
1024 kg and the Earth's radius is 6.38 x 106 m.)
10. A brick dropped from a roof hits the ground 3.92 seconds later. How high (in m) was
the roof?
11. A ball was thrown straight up at 25.5 m/s then caught at the same place it was
released. How many seconds was it in the air?
12. How high above its release point did the ball in the previous question go?
13. A stone is thrown straight up. To reach a height of 3.18 m above its release point,
what must its initial speed be in m/s?
14. A stone is thrown straight up at 7.05 m/s. What is the stone's acceleration in m/s/s at
the top of its rise?
15. The moon has an orbital period of 27.3 days and a mean distance of 3.80 x 105 km
from the center of the Earth. Find the distance (km) an artificial satellite is from the
center of Earth if its period is91.5 minutes.

102
16. A planet has two moons. the first is 4 times as far from the center of the planet as the
second and has a mass that is 3 times the mass of the second. What is the ratio of the
gravitational force on the first planet to the gravitational force on the second?
17. Two spherical balls are placed so their centers are 3.70 m apart. The force between
them is 2.46 x 10-8 N. If the mass of the smaller ball is 74.0 kg, what is the mass of the
other ball?
18. How far (in km) from the center of the Earth would a person with a weight of 762 N
on Earth have to be to have a weight of 52.2 N?
19. A 36.0 kg child is sitting on a merry-go-round with a radius of 4.00 m. The time it
takes the merry-go-round to make one revolution is 3.04 s. Find the centripetal
acceleration of the child.
Summary
In this lecture we have discussed motion of a particle in a circular motion, including the
concepts centripetal acceleration and centripetal force. We have discussed the sensation of an
outward force and an outward acceleration as false sensations; and some important concepts
regarding the universe and the gravitational force. We have also learned that the same simple
laws which govern the motion of objects on Earth also extend to the heavens to govern the
motion of planets, moons, and other satellites.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern.
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics. I.K. International Pub.
Redish, E.F. (2003). Teaching Introductory Physics with the Physics Suite. John
Wiley & Sons.
Daniel Kleppner and Robert J. Kolenkow (2007). An Introduction To Mechanics. Tata
Mcgraw-Hill Education.
Rogers Muncaster, A-Level Physics, 4th Edition. Oxford Press.
103
Lecture 8: Fluid Dynamics
8.1 Introduction
A fluid is a substance that can flow. A fluid conforms to the boundaries of any container in
which it is put. In other words, a fluid cannot support a shearing stress.
Whereas in the discussion of the mechanics of solids physical quantities of use are mass and
force, in the discussion of the mechanics of fluids the physical quantities of use are density
and pressure.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Define fluid and discuss its mechanics.
ii. Determine forces acting on a floating object.
iii. Describe the Pascal’s principle and its application.
Density
By definition, the density of a substance is given by
m
V … (1.36)
where m is the mass and V the volume. Density is a scalar quantity. Whereas the density of
gases varies considerably with pressure the density of liquids does not. Hence gases are said
to be compressible whereas liquids are not.
Pressure
By definition the pressure exerted by the fluid is given by:
F
A …(1.37)
where F is the force exerted over an area A.
Pressure is a scalar quantity even though the force is a vector quantity. Pressure has no
directional properties.
The SI unit of pressure is the Pascal (Pa)
1 Pa = 1 N/m2
The Pascal is a small unit, such that
1 atm = 1.01 × 105 Pa
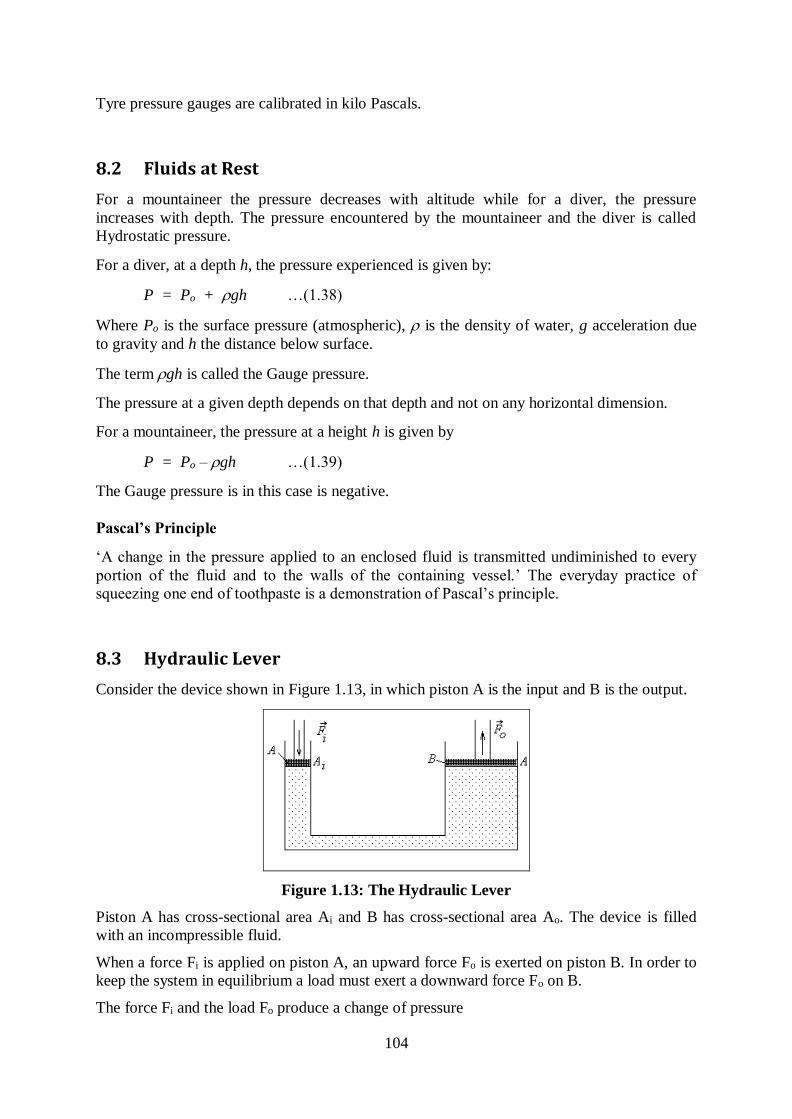
104
Tyre pressure gauges are calibrated in kilo Pascals.
8.2 Fluids at Rest
For a mountaineer the pressure decreases with altitude while for a diver, the pressure
increases with depth. The pressure encountered by the mountaineer and the diver is called
Hydrostatic pressure.
For a diver, at a depth h, the pressure experienced is given by:
P = Po + gh …(1.38)
Where Po is the surface pressure (atmospheric), is the density of water, g acceleration due
to gravity and h the distance below surface.
The term gh is called the Gauge pressure.
The pressure at a given depth depends on that depth and not on any horizontal dimension.
For a mountaineer, the pressure at a height h is given by
P = Po – gh …(1.39)
The Gauge pressure is in this case is negative.
Pascal’s Principle
‘A change in the pressure applied to an enclosed fluid is transmitted undiminished to every
portion of the fluid and to the walls of the containing vessel.’ The everyday practice of
squeezing one end of toothpaste is a demonstration of Pascal’s principle.
8.3 Hydraulic Lever
Consider the device shown in Figure 1.13, in which piston A is the input and B is the output.
Figure 1.13: The Hydraulic Lever
Piston A has cross-sectional area Ai and B has cross-sectional area Ao. The device is filled
with an incompressible fluid.
When a force Fi is applied on piston A, an upward force Fo is exerted on piston B. In order to
keep the system in equilibrium a load must exert a downward force Fo on B.
The force Fi and the load Fo produce a change of pressure

105
i o
i o
F F
A A
oo i
i
AF F
A …(1.40)
Under the conditions that Ao > Ai, then Fo > Fi.
Hence a small force Fi lifts a heavier load Fo.
Relative Distances
If the input piston is moved downward a distance di then the output piston is moved upwards
a distance do such that the same volume of the incompressible fluid is displaced at both
pistons.
Volume displaced in A = di Ai
Volume displaced in B = do Ao
io i
o
Ad d
A …(1.41)
If Ao > Ai then do < di. In other words, the smaller piston moves through a longer distance in
comparison with the distance covered by the larger piston.
Work Done
From Equation 1.40 and 1.41 we can write the output work as:
i o io o i i i
i o
F A AW F d d F d
A A …(1.36)
which shows that the work W on A by the applied force is equal to the work done by the
output piston in lifting the load placed on it.
8.4 Equilibrium of Floating Objects
Two forces act on a floating object. The weight acts downwards and the buoyant force acts
upwards. The two forces need not necessarily act at the same point. The weight acts at the
centre of mass whereas the buoyant force acts at the control of buoyancy, a fictitious point in
the water.
Hence, torques must play a role in the equilibrium of floating objects.
If the floating object is tilted by a small angle from its equilibrium position, the location of
the centre of buoyancy changes. For the floating object to be in stable equilibrium, the centre
of buoyancy must shift in such a way that the buoyant force and the weight provide a
restoring torque so that the object returns to its original upright position.
If the torque acts in the opposite direction the floating objects will tilt farther and eventually
tip over.
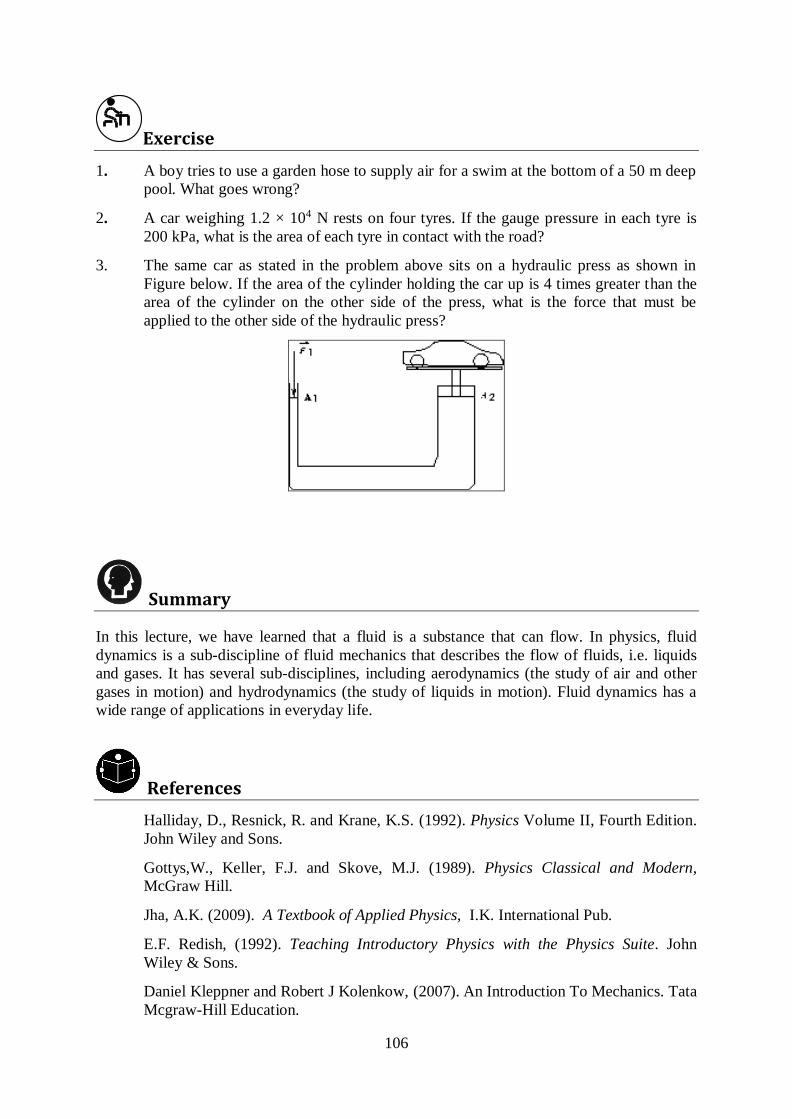
106
Exercise 1. A boy tries to use a garden hose to supply air for a swim at the bottom of a 50 m deep
pool. What goes wrong?
2. A car weighing 1.2 × 104 N rests on four tyres. If the gauge pressure in each tyre is
200 kPa, what is the area of each tyre in contact with the road?
3. The same car as stated in the problem above sits on a hydraulic press as shown in
Figure below. If the area of the cylinder holding the car up is 4 times greater than the
area of the cylinder on the other side of the press, what is the force that must be
applied to the other side of the hydraulic press?
Summary
In this lecture, we have learned that a fluid is a substance that can flow. In physics, fluid
dynamics is a sub-discipline of fluid mechanics that describes the flow of fluids, i.e. liquids
and gases. It has several sub-disciplines, including aerodynamics (the study of air and other
gases in motion) and hydrodynamics (the study of liquids in motion). Fluid dynamics has a
wide range of applications in everyday life.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics, I.K. International Pub.
E.F. Redish, (1992). Teaching Introductory Physics with the Physics Suite. John
Wiley & Sons.
Daniel Kleppner and Robert J Kolenkow, (2007). An Introduction To Mechanics. Tata
Mcgraw-Hill Education.
107
SECTION THREE:
ELECTROSTATICS AND ELECTRIC CIRCUITS
Lecture 9: Electrostatics
9.1 Introduction
Every object in our visible and tangible world contains an enormous amount of electric
charge. However, this fact is hidden because the object contains equal amounts of positive
and negative charges. With such an equality of charge the object is said to be electrically
neutral. If the two charges are not in balance, then there is a net charge that can interact with
other objects. We say an object is charged when such an object has charge imbalance.
Charged objects interact by exerting forces on one another. Like charges repel each other and
unlike charges attract each other.
The attraction and repulsion between charged bodies has many industrial applications including
electrostatic paint-spraying, non-impact inkjet printing and photocopying. In this lecture, we
shall study the basic law of force of electrostatic charges, the electrostatic field created by
electric charges and the basic application of electrostatic field in the capacitor.
Lecture Objectives
At the end of this lecture, you should be able to:
i. Define an electric point charge
State and apply Coulomb’s law
Define the electric field and compute the electric field due to point charges
Define the electric potential energy and compute the electric potential energy due to point
charges
Define capacitance and compute the capacitance due to a parallel plate capacitor
Compute equivalent capacitance due to series and parallel combinations
Compute energy stored in a capacitor
Manipulate RC electric circuits
Compute power in alternating current circuits
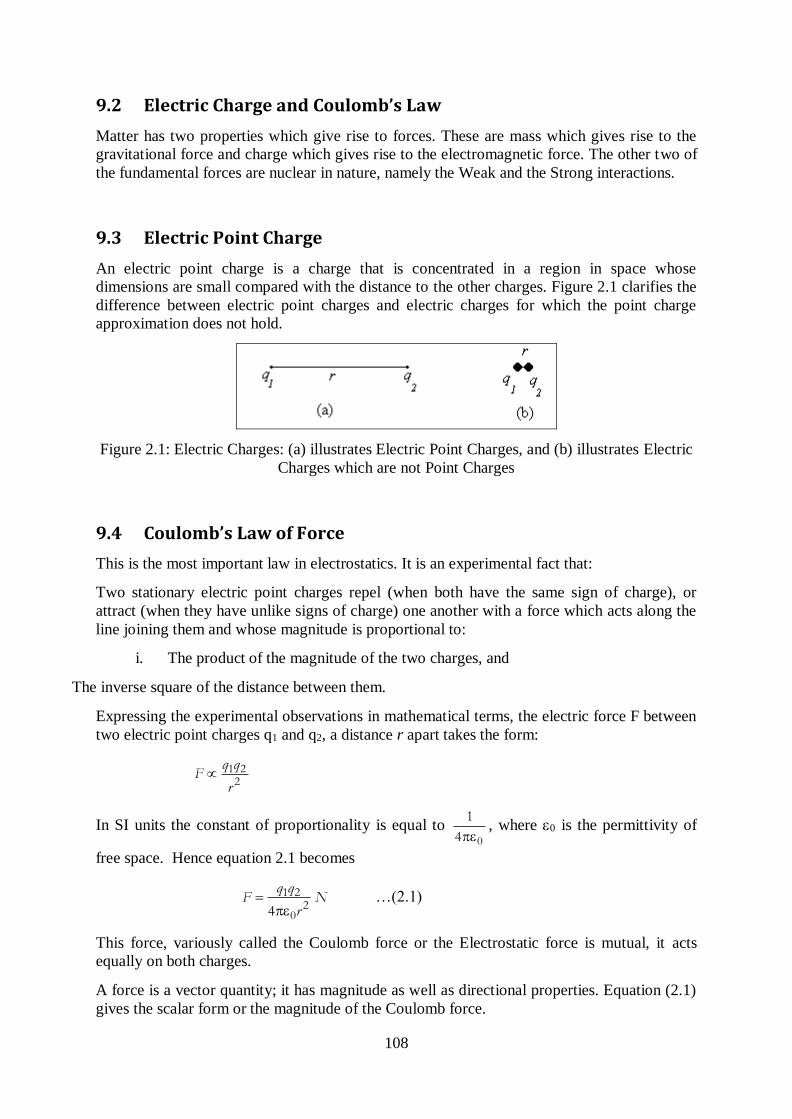
108
9.2 Electric Charge and Coulomb’s Law
Matter has two properties which give rise to forces. These are mass which gives rise to the
gravitational force and charge which gives rise to the electromagnetic force. The other two of
the fundamental forces are nuclear in nature, namely the Weak and the Strong interactions.
9.3 Electric Point Charge
An electric point charge is a charge that is concentrated in a region in space whose
dimensions are small compared with the distance to the other charges. Figure 2.1 clarifies the
difference between electric point charges and electric charges for which the point charge
approximation does not hold.
Figure 2.1: Electric Charges: (a) illustrates Electric Point Charges, and (b) illustrates Electric
Charges which are not Point Charges
9.4 Coulomb’s Law of Force
This is the most important law in electrostatics. It is an experimental fact that:
Two stationary electric point charges repel (when both have the same sign of charge), or
attract (when they have unlike signs of charge) one another with a force which acts along the
line joining them and whose magnitude is proportional to:
i. The product of the magnitude of the two charges, and
The inverse square of the distance between them.
Expressing the experimental observations in mathematical terms, the electric force F between
two electric point charges q1 and q2, a distance r apart takes the form:
1 22
q qF
r
In SI units the constant of proportionality is equal to 0
1
4, where 0 is the permittivity of
free space. Hence equation 2.1 becomes
1 22
04
q qF N
r …(2.1)
This force, variously called the Coulomb force or the Electrostatic force is mutual, it acts
equally on both charges.
A force is a vector quantity; it has magnitude as well as directional properties. Equation (2.1)
gives the scalar form or the magnitude of the Coulomb force.

109
9.5 Vector Form of Coulomb’s Law of Force
With reference to Figure 2.2, we adopt the following convention:
Figure 2.2: The Coulomb Force Between a Pair of Electric Point Charges
The Coulomb force on charge q1 due to charge q2 is denoted by 12F . The position vector that
locates q1 relative to q2 is denoted by 12r . The position of the charge q2 is in effect the origin
of the coordinate system. For a repulsive force, 12r is parallel to 12F , this is the case in Figure
2.2(a).
If the charges have opposite signs, then 12F is
anti-parallel to 12r , which is the case in Figure 2.2(b). In either case, the Coulomb force on
charge q1 due to q2 now takes the form:
1 212 122
0 12
ˆ4
q qF r
r 2.2
where r12 is the magnitude of the vector 12r and 12r is the unit vector in the direction of 12r .
In Cartesian coordinates,
2 2 2
ˆˆ ˆˆ
xi yj zkr
x y z
Similarly, the Coulomb force on a charge q2 due to charge q1 is denoted by 21F and the position
vector of q2 relative to q1becomes 21r , this is the situation shown in Figure 2.2(c ).
1 221 212
0 12
ˆ4
q qF r
r …(2.3)
Notice that the position vector of charge q2 relative to charge q1 is anti-parallel to the position
vector of charge q1 relative to charge q2
i.e. 21 12ˆ ˆr r
Coulomb’s law is valid for point charges that are either at rest with respect to each other or
are moving very slowly so that their magnetic effects can be neglected.
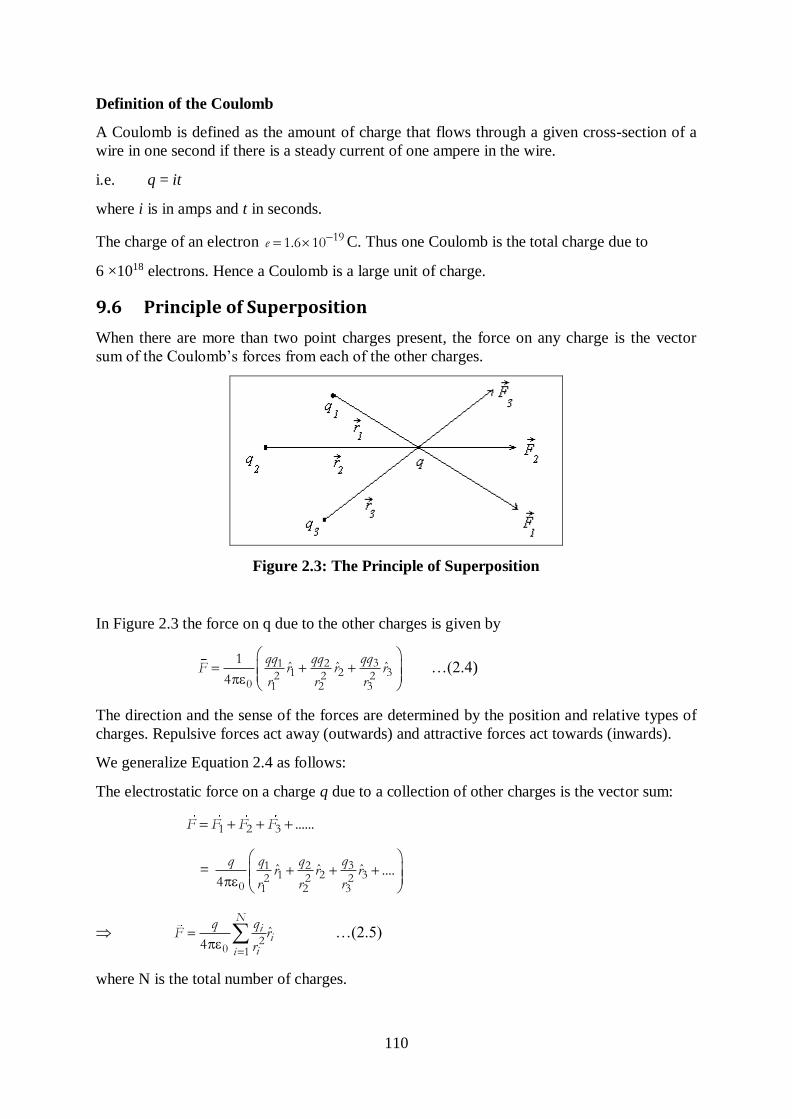
110
Definition of the Coulomb
A Coulomb is defined as the amount of charge that flows through a given cross-section of a
wire in one second if there is a steady current of one ampere in the wire.
i.e. q = it
where i is in amps and t in seconds.
The charge of an electron 191.6 10e C. Thus one Coulomb is the total charge due to
6 ×1018 electrons. Hence a Coulomb is a large unit of charge.
9.6 Principle of Superposition
When there are more than two point charges present, the force on any charge is the vector
sum of the Coulomb’s forces from each of the other charges.
Figure 2.3: The Principle of Superposition
In Figure 2.3 the force on q due to the other charges is given by
31 21 2 32 2 2
0 1 2 3
1ˆ ˆ ˆ
4
qqqq qqF r r r
r r r
…(2.4)
The direction and the sense of the forces are determined by the position and relative types of
charges. Repulsive forces act away (outwards) and attractive forces act towards (inwards).
We generalize Equation 2.4 as follows:
The electrostatic force on a charge q due to a collection of other charges is the vector sum:
1 2 3 ......F F F F
=
31 21 2 32 2 2
0 1 2 3
ˆ ˆ ˆ ....4
qq q qr r r
r r r
2
0 1
ˆ4
Nii
ii
qqF r
r …(2.5)
where N is the total number of charges.
111
Significance of the Coulomb’s Law of Force
The Coulomb law describes
i. The electrical forces that bind the electrons of an atom to its nucleus,
The forces that bind atoms together to form molecules, and
The forces that bind atoms and molecules together to form solids or liquids.
In short, all forces that one encounters in materials, whether binding or contact, are electrical
in nature and therefore they are Coulomb-derived forces.
Exercise 1. Determine the electrical force of attraction between two balloons with separate
charges of +3.5 × 10-8 C and -2.9 × 10-8 C when separated a distance of 0.65 m.
2. Determine the electrical force of attraction between two balloons with opposite
charges but the same quantity of charge of 6.0 × 10–7 C when separated at a distance
of 0.50 m.
3. At what distance of separation must two 1.00-microCoulomb charges be positioned in
order for the repulsive force between them to be equivalent to the weight of a 1.00 kg
mass?
4. Two charged objects have a repulsive force of 0.080 N. If the charge of both of the
objects is doubled, then what is the new force?
5. Two charged objects have a repulsive force of 0.080 N. If the distance separating the
objects is tripled, then what is the new force?
6. Two charged objects have a repulsive force of 0.080 N. If the charge of one of the
objects is doubled, and the distance separating the objects is doubled, then what is the
new force?
7. Three charges are placed along the x-axis. Charge A is a +18 nC charge placed at the
origin. Charge B is a -27 nC charge placed at x = 60 cm location. Where along the
axis must positively-charged P = 10 nC be placed in order to be at equilibrium?
Summary
Electrostatics is a branch of physics that deals with electric charges at rest. Electric charge is
the physical property of matter that causes it to experience a force when placed in an
electromagnetic field.

112
There are two types of electric charges; positive charge and negative charge. With an equality
of positive and negative charges, the object is said to be electrically neutral.
Electrostatic phenomena arise from the forces that electric charges exert on each other. Such
forces are described by Coulomb's law. This is a law in physics for quantifying the amount of
force with which stationary electrically charged particles repel or attract each other. The
Coulomb’s Law of Force states that; the magnitude of the Electrostatics force of interaction
between two charges is directly proportional to the product of the magnitudes of charges and
inversely proportional to the square of the distances between them.
Coulomb’s law is valid for point charges that are either at rest with respect to each other or
are moving very slowly so that their magnetic effects can be neglected. A Coulomb is defined
as the amount of charge that flows through a given cross-section of a wire in one second if
there is a steady current of one ampere in the wire.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern.
McGraw Hill.
Jha, A.K. (2009). A Textbook of Applied Physics. I.K. International Pub.
E.F. Redish (2003). Teaching Introductory Physics with the Physics Suite,. John
Wiley & Sons.
Hilary D. Brewster (2009). Electrostatics. Oxford Book Company.
113
Lecture 10: Electric Field
10.1 Introduction
According to Coulomb’s law, a force exists between point charges that cause them either to
be attracted or repelled. The Coulomb force is an action-at-a-distance kind of force and not a
contact force. Therefore, the space surrounding a point charge, say q, is affected by the point
charge. This effect which would result in a force being exerted on another distant charge q0 is
called an electric field and the electric point charge q is said to be the source of the electric
field.
In general, a field is a physical quantity that is a function of space coordinates, i.e. the field
varies with position. There exists a function to represent the physical quantity that takes a
specific value at each point in space. There are scalar fields as well as vector fields. The
electric field is a vector field whereas the gravitational field is a scalar field.
Lecture Objectives
At the end of this lecture, you should be able to:
i. Describe the concept of electric field.
State and apply Coulomb’s law
Define the electric field and compute the electric field due to point charges
Define the electric potential energy and compute the electric potential energy due to point
charges
10.2 Concept of Electric Field
Consider a positive test charge q0 being brought towards a positive point charge q. The test
charge experiences a repulsive force which at any point a distance r from the charge q is
given by Coulomb’s law:
02
0
ˆ4
qqF r
r
The force F decreases at large r but it gets stronger as r is decreased.
Definition of the Electric Field
The Electric Field Strength (or simply the Electric Field) at a point is defined as the Electrical
Force (or the Coulomb Force) per unit positive electric charge.
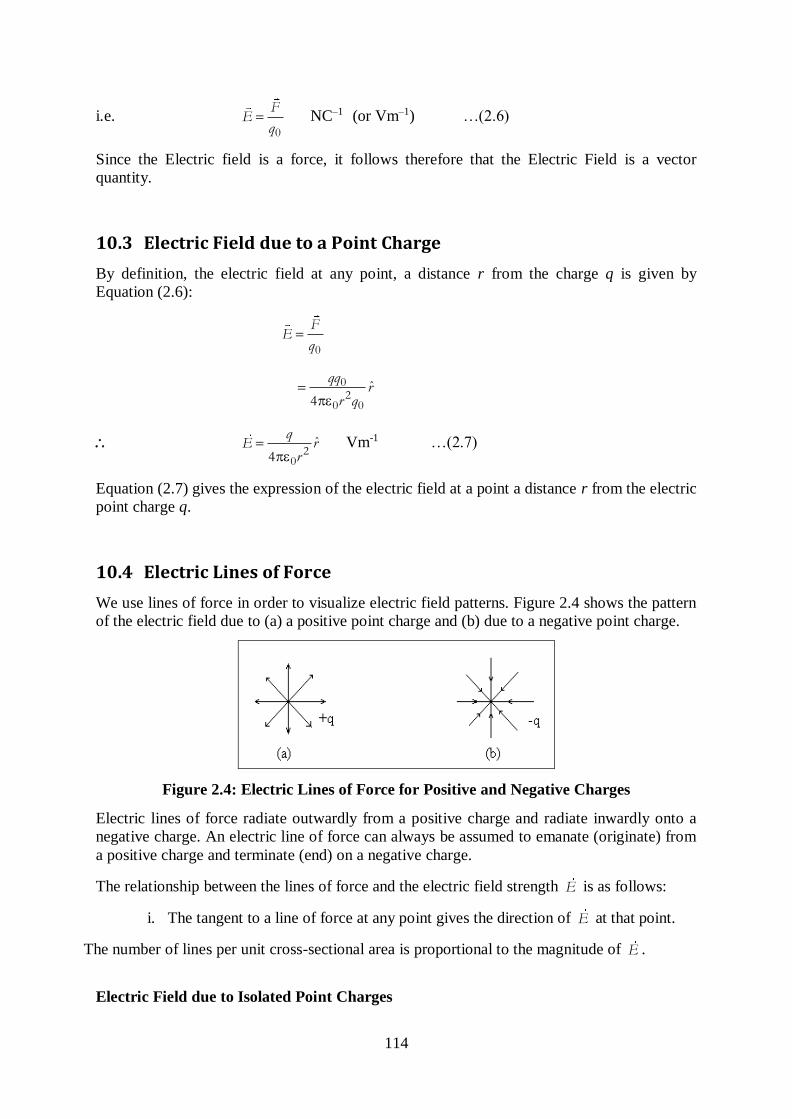
114
i.e. 0
FE
q NC–1 (or Vm–1) …(2.6)
Since the Electric field is a force, it follows therefore that the Electric Field is a vector
quantity.
10.3 Electric Field due to a Point Charge
By definition, the electric field at any point, a distance r from the charge q is given by
Equation (2.6):
0
FE
q
02
0 0
ˆ4
qqr
r q
20
ˆ4
qE r
r Vm-1 …(2.7)
Equation (2.7) gives the expression of the electric field at a point a distance r from the electric
point charge q.
10.4 Electric Lines of Force
We use lines of force in order to visualize electric field patterns. Figure 2.4 shows the pattern
of the electric field due to (a) a positive point charge and (b) due to a negative point charge.
Figure 2.4: Electric Lines of Force for Positive and Negative Charges
Electric lines of force radiate outwardly from a positive charge and radiate inwardly onto a
negative charge. An electric line of force can always be assumed to emanate (originate) from
a positive charge and terminate (end) on a negative charge.
The relationship between the lines of force and the electric field strength E is as follows:
i. The tangent to a line of force at any point gives the direction of E at that point.
The number of lines per unit cross-sectional area is proportional to the magnitude of E .
Electric Field due to Isolated Point Charges
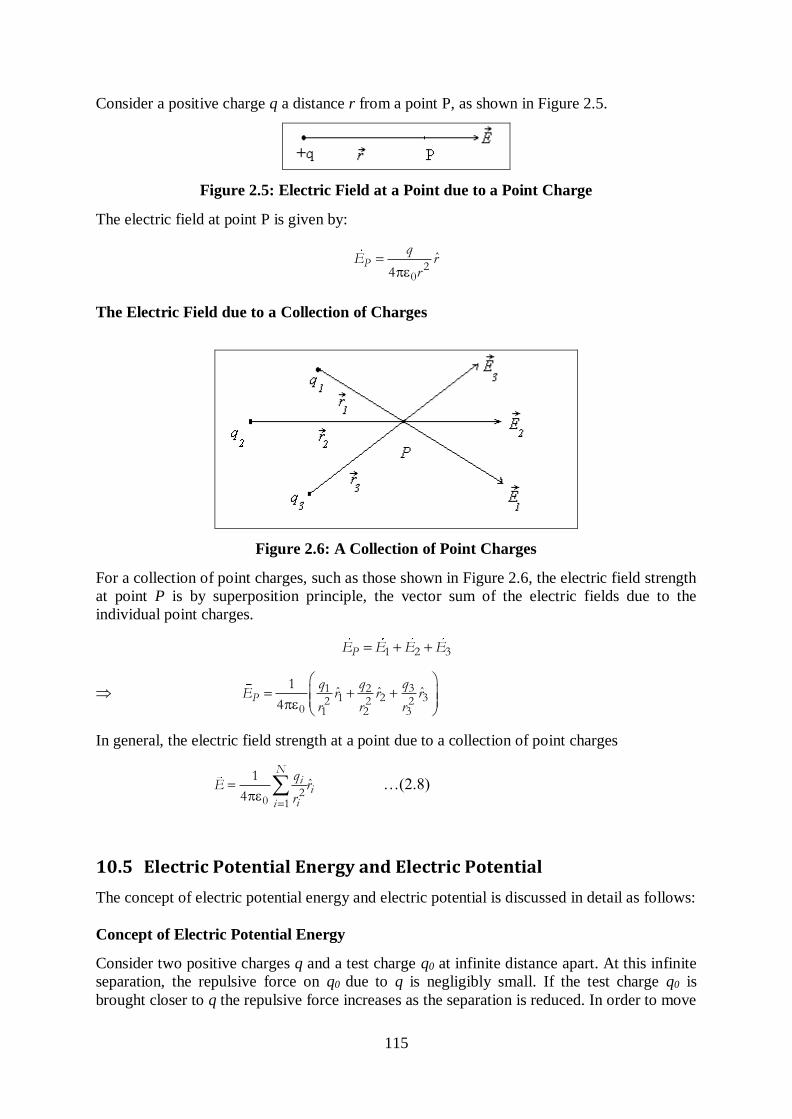
115
Consider a positive charge q a distance r from a point P, as shown in Figure 2.5.
Figure 2.5: Electric Field at a Point due to a Point Charge
The electric field at point P is given by:
20
ˆ4
Pq
E rr
The Electric Field due to a Collection of Charges
Figure 2.6: A Collection of Point Charges
For a collection of point charges, such as those shown in Figure 2.6, the electric field strength
at point P is by superposition principle, the vector sum of the electric fields due to the
individual point charges.
1 2 3PE E E E
31 21 2 32 2 2
0 1 2 3
1ˆ ˆ ˆ
4P
qq qE r r r
r r r
In general, the electric field strength at a point due to a collection of point charges
2
0 1
1ˆ
4
Nii
ii
qE r
r …(2.8)
10.5 Electric Potential Energy and Electric Potential
The concept of electric potential energy and electric potential is discussed in detail as follows:
Concept of Electric Potential Energy
Consider two positive charges q and a test charge q0 at infinite distance apart. At this infinite
separation, the repulsive force on q0 due to q is negligibly small. If the test charge q0 is
brought closer to q the repulsive force increases as the separation is reduced. In order to move

116
q0 towards q without accelerating q0, the external agent must exert a force on q0 which is
equal but opposite to the repulsive Coulomb force on q0 due to q.
i.e. Fexternal = – FCoulomb
The total work done ‘U’ by the external agent in bringing q0 from infinity to a position a
distance r from q is called the electric potential energy and it is given by:
4
qqU
r
Electric Potential Energy of a System of Charges
Thus, for a system of three-point charges, as shown in Figure 2.7, the electric potential energy
of the system is
q q q qq q 1 3 2 31 2U= + +
4 r 4 r 4 ro o o12 13 23
Figure 2.7: A System of Three-Point Charges
Electric Potential
The electric potential describes the amount of potential energy stored in each point of an
electric field. It is, in effect, the potential energy between a point charge q and an imaginary
positive charge of magnitude one coulomb, a distance r from charge q.
Hence, the electric potential at a point due to a point charge q is given by
04
qV
r
… (2.9)
Equation 2.9 gives the electric potential due to a positive point charge q at a point P a
distance r from the point charge.
Electric Potential due to a Collection of Point Charges
The electric potential at any point P due to a collection of charges is calculated using the
following procedure:
i. Calculate the electric potential Vi due to each point charge qi, and
Add the contributions Vi
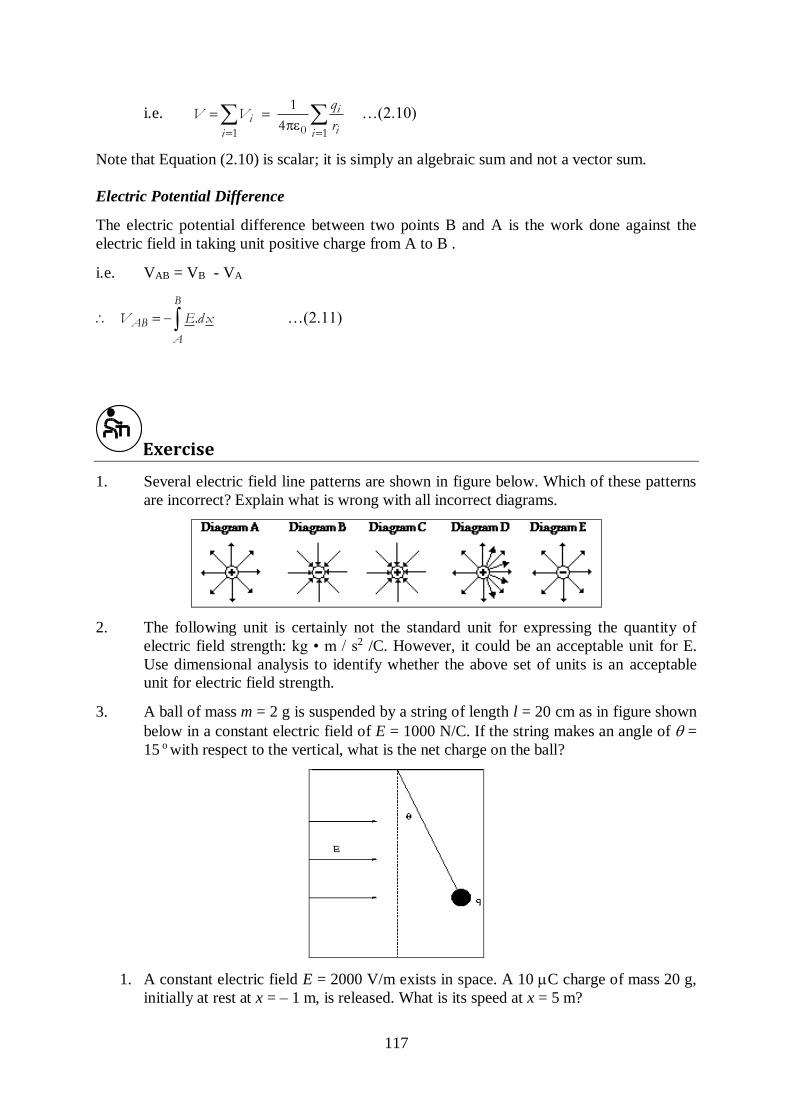
117
i.e. 01 1
1
4
ii
ii i
qV V
r
…(2.10)
Note that Equation (2.10) is scalar; it is simply an algebraic sum and not a vector sum.
Electric Potential Difference
The electric potential difference between two points B and A is the work done against the
electric field in taking unit positive charge from A to B .
i.e. VAB = VB - VA
.
B
AB
A
V E dx …(2.11)
Exercise 1. Several electric field line patterns are shown in figure below. Which of these patterns
are incorrect? Explain what is wrong with all incorrect diagrams.
2. The following unit is certainly not the standard unit for expressing the quantity of
electric field strength: kg • m / s2 /C. However, it could be an acceptable unit for E.
Use dimensional analysis to identify whether the above set of units is an acceptable
unit for electric field strength.
3. A ball of mass m = 2 g is suspended by a string of length l = 20 cm as in figure shown
below in a constant electric field of E = 1000 N/C. If the string makes an angle of =
15 o with respect to the vertical, what is the net charge on the ball?
1. A constant electric field E = 2000 V/m exists in space. A 10 C charge of mass 20 g,
initially at rest at x = – 1 m, is released. What is its speed at x = 5 m?
118
Summary
Electric field is a region around a charged particle or object within which a force would be
exerted on other charged particles or objects. The electric point charge (q) is said to be the
source of the electric field. Since the Electric field is a force, it follows therefore that the
Electric Field is a vector quantity. The electric potential describes the amount of potential
energy stored in each point of an electric field.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys, W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
A.K. Jha (2009). A Textbook of Applied Physics, I.K. International Pub.
E.F. Redish (2003). Teaching Introductory Physics with the Physics Suite, John
Wiley & Sons.
Hilary D. Brewster (2009). Electrostatics. Oxford Book Company.
119
Lecture 11: Capacitance
11.1 Introduction
The capacitor is a component which has the ability or “capacity” to store energy in the form
of an electrical charge producing a potential difference (Static Voltage) across its plates,
much like a small rechargeable battery. There are many different kinds of capacitors available
from very small capacitor beads used in resonance circuits to large power factor correction
capacitors, but they all do the same thing, they store charge. In its basic form, a capacitor
consists of two or more parallel conductive (metal) plates which are not connected or
touching each other, but are electrically separated either by air or by some form of a good
insulating material such as waxed paper, mica, ceramic, plastic or some form of a liquid gel
as used in electrolytic capacitors. The insulating layer between a capacitors plates is
commonly called the Dielectric.
A Typical Capacitor
Lecture Objectives
At the end of this lecture, you should be able to:
i. Define capacitor and capacitance.
ii. Calculate capacitance of a capacitor.
iii. Explain the applications of capacitors.
iv. Describe the parallel and series connections of capacitors.
v. Discuss storage of energy in an electric field.
Due to this insulating layer, DC current cannot flow through the capacitor as it blocks it
allowing instead a voltage to be present across the plates in the form of an electrical charge.
The conductive metal plates of a capacitor can be either square, circular or rectangular, or
they can be of a cylindrical or spherical shape with the general shape, size and construction of
a parallel plate capacitor depending on its application and voltage rating.
When used in a direct current or DC circuit, a capacitor charges up to its supply voltage but
blocks the flow of current through it because the dielectric of a capacitor is non-conductive
and basically an insulator. However, when a capacitor is connected to an alternating current
or AC circuit, the flow of the current appears to pass straight through the capacitor with little
or no resistance.
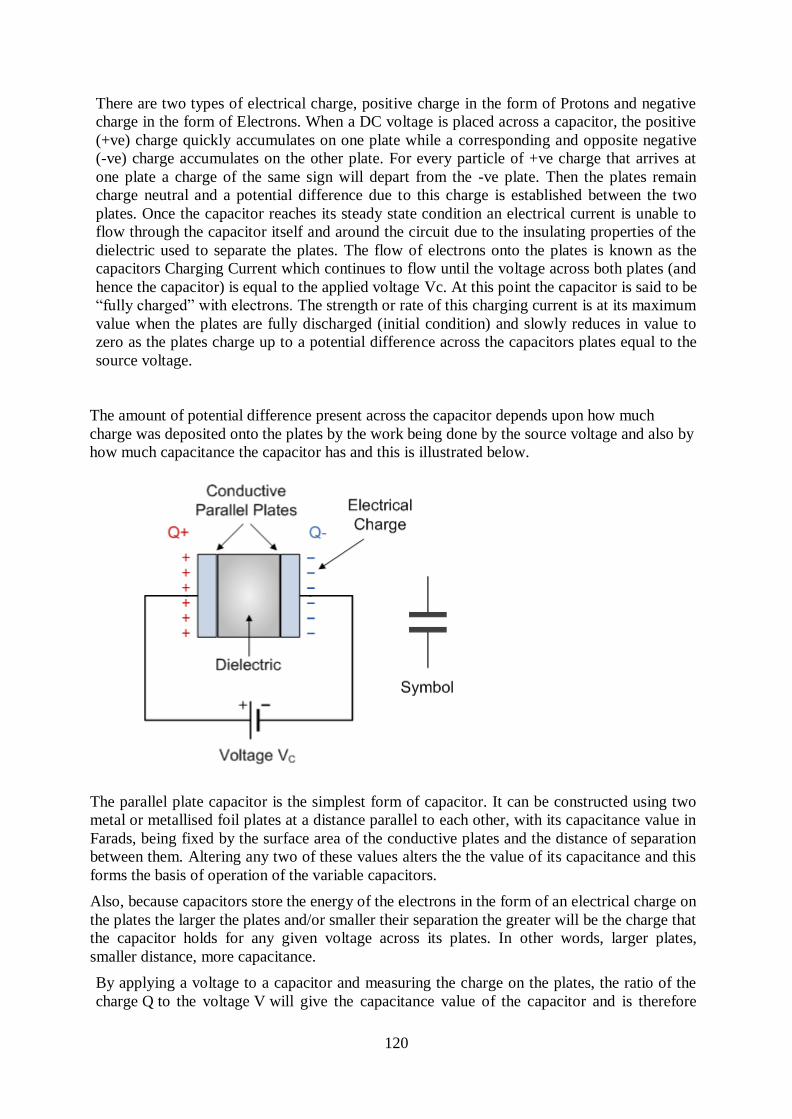
120
There are two types of electrical charge, positive charge in the form of Protons and negative
charge in the form of Electrons. When a DC voltage is placed across a capacitor, the positive
(+ve) charge quickly accumulates on one plate while a corresponding and opposite negative
(-ve) charge accumulates on the other plate. For every particle of +ve charge that arrives at
one plate a charge of the same sign will depart from the -ve plate. Then the plates remain
charge neutral and a potential difference due to this charge is established between the two
plates. Once the capacitor reaches its steady state condition an electrical current is unable to
flow through the capacitor itself and around the circuit due to the insulating properties of the
dielectric used to separate the plates. The flow of electrons onto the plates is known as the
capacitors Charging Current which continues to flow until the voltage across both plates (and
hence the capacitor) is equal to the applied voltage Vc. At this point the capacitor is said to be
“fully charged” with electrons. The strength or rate of this charging current is at its maximum
value when the plates are fully discharged (initial condition) and slowly reduces in value to
zero as the plates charge up to a potential difference across the capacitors plates equal to the
source voltage.
The amount of potential difference present across the capacitor depends upon how much
charge was deposited onto the plates by the work being done by the source voltage and also by
how much capacitance the capacitor has and this is illustrated below.
The parallel plate capacitor is the simplest form of capacitor. It can be constructed using two
metal or metallised foil plates at a distance parallel to each other, with its capacitance value in
Farads, being fixed by the surface area of the conductive plates and the distance of separation
between them. Altering any two of these values alters the the value of its capacitance and this
forms the basis of operation of the variable capacitors.
Also, because capacitors store the energy of the electrons in the form of an electrical charge on
the plates the larger the plates and/or smaller their separation the greater will be the charge that
the capacitor holds for any given voltage across its plates. In other words, larger plates,
smaller distance, more capacitance.
By applying a voltage to a capacitor and measuring the charge on the plates, the ratio of the
charge Q to the voltage V will give the capacitance value of the capacitor and is therefore
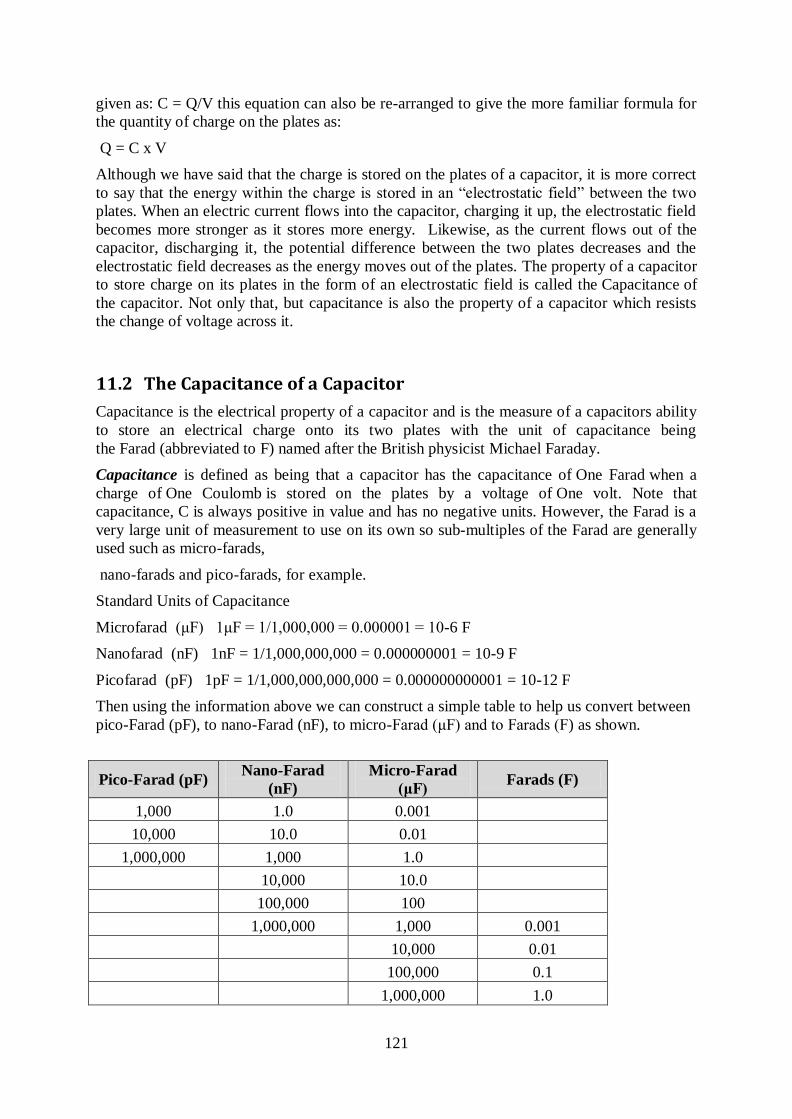
121
given as: C = Q/V this equation can also be re-arranged to give the more familiar formula for
the quantity of charge on the plates as:
Q = C x V
Although we have said that the charge is stored on the plates of a capacitor, it is more correct
to say that the energy within the charge is stored in an “electrostatic field” between the two
plates. When an electric current flows into the capacitor, charging it up, the electrostatic field
becomes more stronger as it stores more energy. Likewise, as the current flows out of the
capacitor, discharging it, the potential difference between the two plates decreases and the
electrostatic field decreases as the energy moves out of the plates. The property of a capacitor
to store charge on its plates in the form of an electrostatic field is called the Capacitance of
the capacitor. Not only that, but capacitance is also the property of a capacitor which resists
the change of voltage across it.
11.2 The Capacitance of a Capacitor
Capacitance is the electrical property of a capacitor and is the measure of a capacitors ability
to store an electrical charge onto its two plates with the unit of capacitance being
the Farad (abbreviated to F) named after the British physicist Michael Faraday.
Capacitance is defined as being that a capacitor has the capacitance of One Farad when a
charge of One Coulomb is stored on the plates by a voltage of One volt. Note that
capacitance, C is always positive in value and has no negative units. However, the Farad is a
very large unit of measurement to use on its own so sub-multiples of the Farad are generally
used such as micro-farads,
nano-farads and pico-farads, for example.
Standard Units of Capacitance
Microfarad (μF) 1μF = 1/1,000,000 = 0.000001 = 10-6 F
Nanofarad (nF) 1nF = 1/1,000,000,000 = 0.000000001 = 10-9 F
Picofarad (pF) 1pF = 1/1,000,000,000,000 = 0.000000000001 = 10-12 F
Then using the information above we can construct a simple table to help us convert between
pico-Farad (pF), to nano-Farad (nF), to micro-Farad (μF) and to Farads (F) as shown.
Pico-Farad (pF) Nano-Farad
(nF)
Micro-Farad
(μF) Farads (F)
1,000 1.0 0.001
10,000 10.0 0.01
1,000,000 1,000 1.0
10,000 10.0
100,000 100
1,000,000 1,000 0.001
10,000 0.01
100,000 0.1
1,000,000 1.0
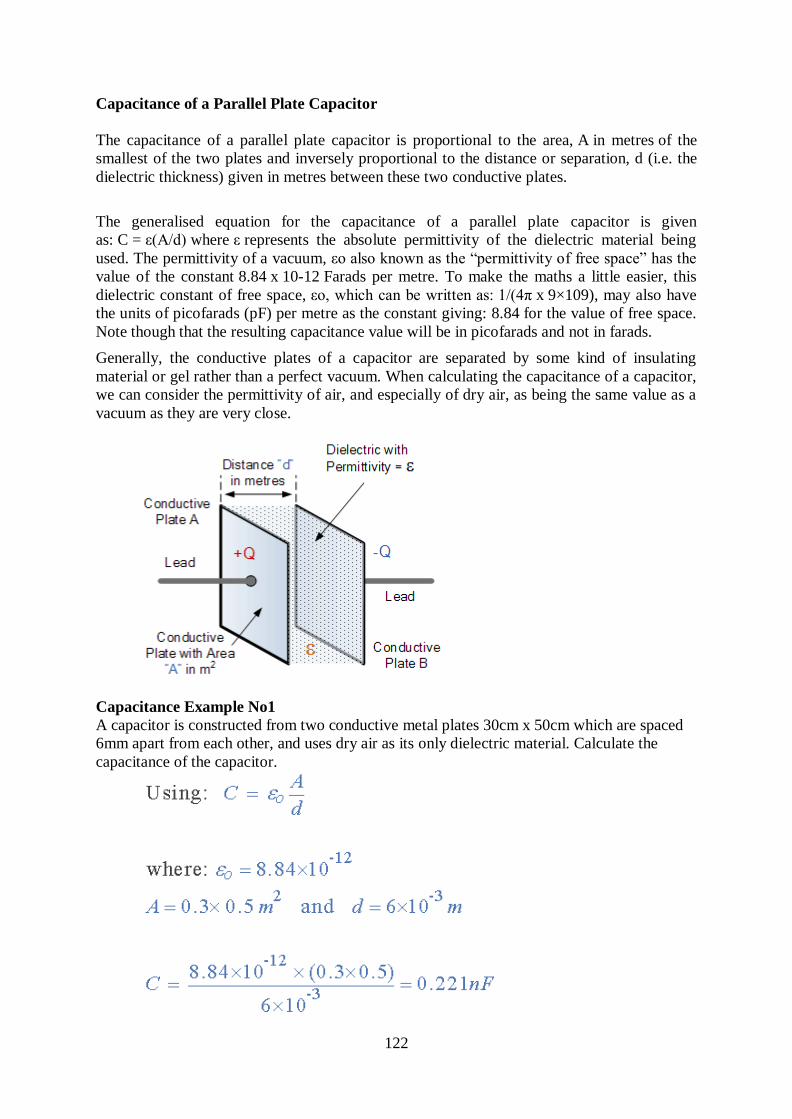
122
Capacitance of a Parallel Plate Capacitor
The capacitance of a parallel plate capacitor is proportional to the area, A in metres of the
smallest of the two plates and inversely proportional to the distance or separation, d (i.e. the
dielectric thickness) given in metres between these two conductive plates.
The generalised equation for the capacitance of a parallel plate capacitor is given
as: C = ε(A/d) where ε represents the absolute permittivity of the dielectric material being
used. The permittivity of a vacuum, εo also known as the “permittivity of free space” has the
value of the constant 8.84 x 10-12 Farads per metre. To make the maths a little easier, this
dielectric constant of free space, εo, which can be written as: 1/(4π x 9×109), may also have
the units of picofarads (pF) per metre as the constant giving: 8.84 for the value of free space.
Note though that the resulting capacitance value will be in picofarads and not in farads.
Generally, the conductive plates of a capacitor are separated by some kind of insulating
material or gel rather than a perfect vacuum. When calculating the capacitance of a capacitor,
we can consider the permittivity of air, and especially of dry air, as being the same value as a
vacuum as they are very close.
Capacitance Example No1
A capacitor is constructed from two conductive metal plates 30cm x 50cm which are spaced
6mm apart from each other, and uses dry air as its only dielectric material. Calculate the
capacitance of the capacitor.

123
Then the value of the capacitor consisting of two plates separated by air is calculated as
221pF or 0.221nF
11.3 The Dielectric of a Capacitor
As well as the overall size of the conductive plates and their distance or spacing apart from
each other, another factor which affects the overall capacitance of the device is the type of
dielectric material being used. In other words the “Permittivity” (ε) of the dielectric. The
conductive plates of a capacitor are generally made of a metal foil or a metal film allowing
for the flow of electrons and charge, but the dielectric material used is always an insulator.
The various insulating materials used as the dielectric in a capacitor differ in their ability to
block or pass an electrical charge. This dielectric material can be made from a number of
insulating materials or combinations of these materials with the most common types used
being: air, paper, polyester, polypropylene, Mylar, ceramic, glass, oil, or a variety of other
materials.
The factor by which the dielectric material, or insulator, increases the capacitance of the
capacitor compared to air is known as the Dielectric Constant, k and a dielectric material with
a high dielectric constant is a better insulator than a dielectric material with a lower dielectric
constant. Dielectric constant is a dimensionless quantity since it is relative to free space.
The actual permittivity or “complex permittivity” of the dielectric material between the plates
is then the product of the permittivity of free space (εo) and the relative permittivity (εr) of
the material being used as the dielectric and is given as:
Complex Permittivity
In other words, if we take the permittivity of free space, εo as our base level and make it
equal to one, when the vacuum of free space is replaced by some other type of insulating
material, their permittivity of its dielectric is referenced to the base dielectric of free space
giving a multiplication factor known as “relative permittivity”, εr. So the value of the
complex permittivity, ε will always be equal to the relative permittivity times one.
Typical units of dielectric permittivity, ε or dielectric constant for common materials are:
pure vacuum = 1.0000, air = 1.0006, paper = 2.5 to 3.5, glass = 3 to 10, mica = 5 to 7, wood =
3 to 8 and metal oxide powders = 6 to 20 etc. This then gives us a final equation for the
capacitance of a capacitor as:
One method used to increase the overall capacitance of a capacitor while keeping its size
small is to “interleave” more plates together within a single capacitor body. Instead of just
one set of parallel plates, a capacitor can have many individual plates connected together
thereby increasing the surface area, A of the plates.
For a standard parallel plate capacitor as shown above, the capacitor has two plates,
labelled A and B. Therefore as the number of capacitor plates is two, we can say that n = 2,
where “n” represents the number of plates.
Then our equation above for a single parallel plate capacitor should really be:

124
However, the capacitor may have two parallel plates but only one side of each plate is in
contact with the dielectric in the middle as the other side of each plate forms the outside of
the capacitor. If we take the two halves of the plates and join them together we effectively
only have “one” whole plate in contact with the dielectric.
As for a single parallel plate capacitor, n – 1 = 2 – 1 which equals 1 as C = (εo.εr x 1 x A)/d is
exactly the same as saying: C = (εo.εr.A)/d which is the standard equation above.
Now suppose we have a capacitor made up of 9 interleaved plates, then n = 9 as shown.
Multi-plate Capacitor
Now we have five plates connected to one lead (A) and four plates to the other lead (B). Then
BOTH sides of the four plates connected to lead B are in contact with the dielectric, whereas
only one side of each of the outer plates connected to A is in contact with the dielectric. Then
as above, the useful surface area of each set of plates is only eight and its capacitance is
therefore given as:
Modern capacitors can be classified according to the characteristics and properties of their
insulating dielectric:
Low Loss, High Stability such as Mica, Low-K Ceramic, Polystyrene.
Medium Loss, Medium Stability such as Paper, Plastic Film, High-K Ceramic.
Polarized Capacitors such as Electrolytic’s, Tantalum’s.
Voltage Rating of a Capacitor
All capacitors have a maximum voltage rating and when selecting a capacitor consideration
must be given to the amount of voltage to be applied across the capacitor. The maximum
amount of voltage that can be applied to the capacitor without damage to its dielectric
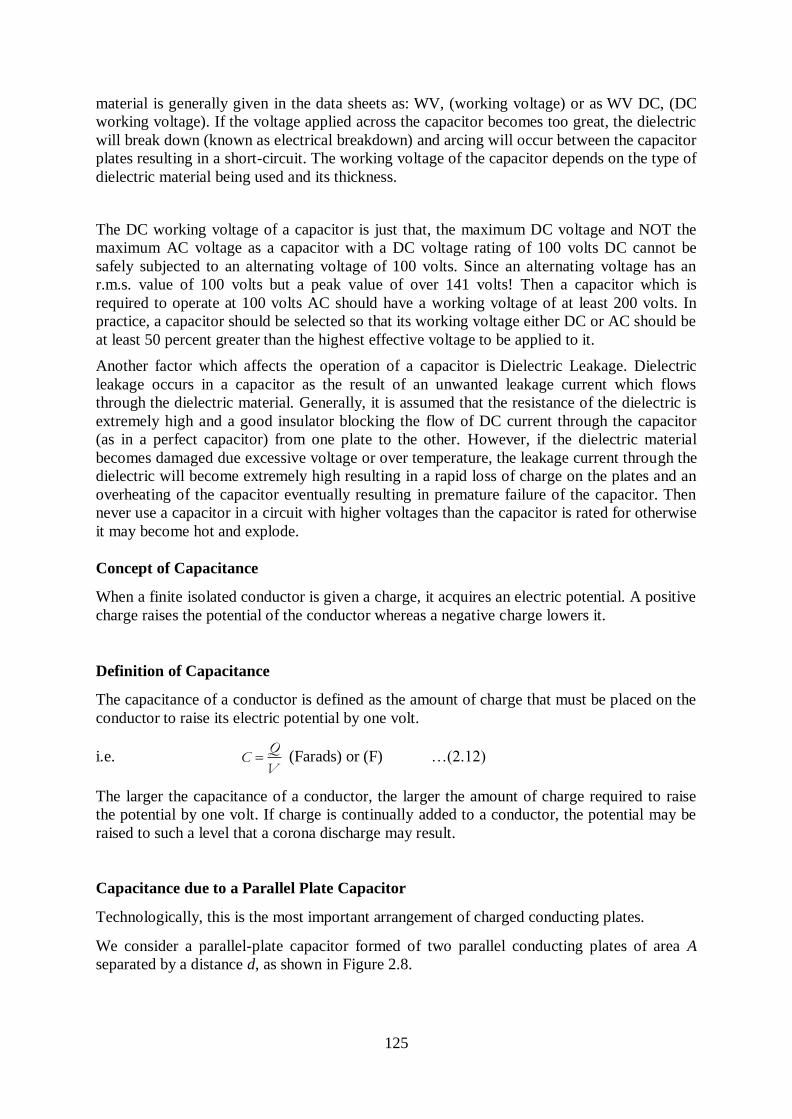
125
material is generally given in the data sheets as: WV, (working voltage) or as WV DC, (DC
working voltage). If the voltage applied across the capacitor becomes too great, the dielectric
will break down (known as electrical breakdown) and arcing will occur between the capacitor
plates resulting in a short-circuit. The working voltage of the capacitor depends on the type of
dielectric material being used and its thickness.
The DC working voltage of a capacitor is just that, the maximum DC voltage and NOT the
maximum AC voltage as a capacitor with a DC voltage rating of 100 volts DC cannot be
safely subjected to an alternating voltage of 100 volts. Since an alternating voltage has an
r.m.s. value of 100 volts but a peak value of over 141 volts! Then a capacitor which is
required to operate at 100 volts AC should have a working voltage of at least 200 volts. In
practice, a capacitor should be selected so that its working voltage either DC or AC should be
at least 50 percent greater than the highest effective voltage to be applied to it.
Another factor which affects the operation of a capacitor is Dielectric Leakage. Dielectric
leakage occurs in a capacitor as the result of an unwanted leakage current which flows
through the dielectric material. Generally, it is assumed that the resistance of the dielectric is
extremely high and a good insulator blocking the flow of DC current through the capacitor
(as in a perfect capacitor) from one plate to the other. However, if the dielectric material
becomes damaged due excessive voltage or over temperature, the leakage current through the
dielectric will become extremely high resulting in a rapid loss of charge on the plates and an
overheating of the capacitor eventually resulting in premature failure of the capacitor. Then
never use a capacitor in a circuit with higher voltages than the capacitor is rated for otherwise
it may become hot and explode.
Concept of Capacitance
When a finite isolated conductor is given a charge, it acquires an electric potential. A positive
charge raises the potential of the conductor whereas a negative charge lowers it.
Definition of Capacitance
The capacitance of a conductor is defined as the amount of charge that must be placed on the
conductor to raise its electric potential by one volt.
i.e. Q
CV
(Farads) or (F) …(2.12)
The larger the capacitance of a conductor, the larger the amount of charge required to raise
the potential by one volt. If charge is continually added to a conductor, the potential may be
raised to such a level that a corona discharge may result.
Capacitance due to a Parallel Plate Capacitor
Technologically, this is the most important arrangement of charged conducting plates.
We consider a parallel-plate capacitor formed of two parallel conducting plates of area A
separated by a distance d, as shown in Figure 2.8.
126
Figure 2.8: Parallel Plate Capacitor
If the separation distance d is small compared with the plate dimensions, the electric field
strength E between the plates may be considered to be uniform. In other words, neglecting
fringing of the electric field at the edges, or in short, neglect edge effects, the electric field
between the plates
0 0
qE
A
…(2.13)
The electric potential difference between the plates is:
.
higherpotential
lowerpotential
V E d l …(2.14)
The integration is carried out from the plate at lower potential to the plate at higher potential
in consistence with the definition of V.
Between the plates E and dl are in opposite directions, and so Equation (2.14) becomes
0
d
V Edl
qdV
A …(2.15)
Thus, the capacitance of the configuration is
0AqC
V d
…(2.16)
The capacitance of a parallel plate capacitor is proportional to its area and inversely
proportional to the spacing between the plates. Therefore, the capacitance C can be increased
as follows:
1. Reduce d: This is limited to about 10 m and also the onset of electrical breakdown.
2. Increase A: Size of the apparatus into which the capacitor is to be used limits A.
Interleaving increases A somewhat but not by several orders of magnitude.
3. Use of dielectrics: A dielectric material is an insulator. The presence of a dielectric
between charged conducting plates is that the electric field between the plates is
reduced and consequently the electric potential is reduced. From the capacitance–
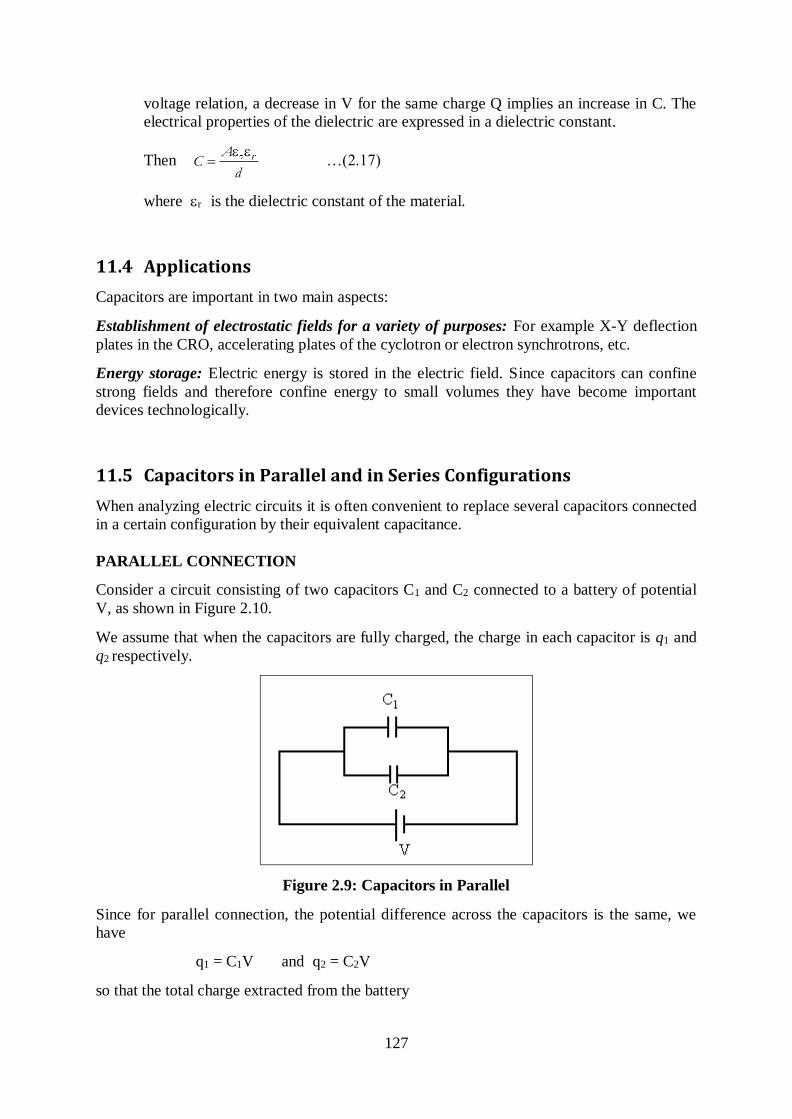
127
voltage relation, a decrease in V for the same charge Q implies an increase in C. The
electrical properties of the dielectric are expressed in a dielectric constant.
Then
rAC
d …(2.17)
where r is the dielectric constant of the material.
11.4 Applications
Capacitors are important in two main aspects:
Establishment of electrostatic fields for a variety of purposes: For example X-Y deflection
plates in the CRO, accelerating plates of the cyclotron or electron synchrotrons, etc.
Energy storage: Electric energy is stored in the electric field. Since capacitors can confine
strong fields and therefore confine energy to small volumes they have become important
devices technologically.
11.5 Capacitors in Parallel and in Series Configurations
When analyzing electric circuits it is often convenient to replace several capacitors connected
in a certain configuration by their equivalent capacitance.
PARALLEL CONNECTION
Consider a circuit consisting of two capacitors C1 and C2 connected to a battery of potential
V, as shown in Figure 2.10.
We assume that when the capacitors are fully charged, the charge in each capacitor is q1 and
q2 respectively.
Figure 2.9: Capacitors in Parallel
Since for parallel connection, the potential difference across the capacitors is the same, we
have
q1 = C1V and q2 = C2V
so that the total charge extracted from the battery
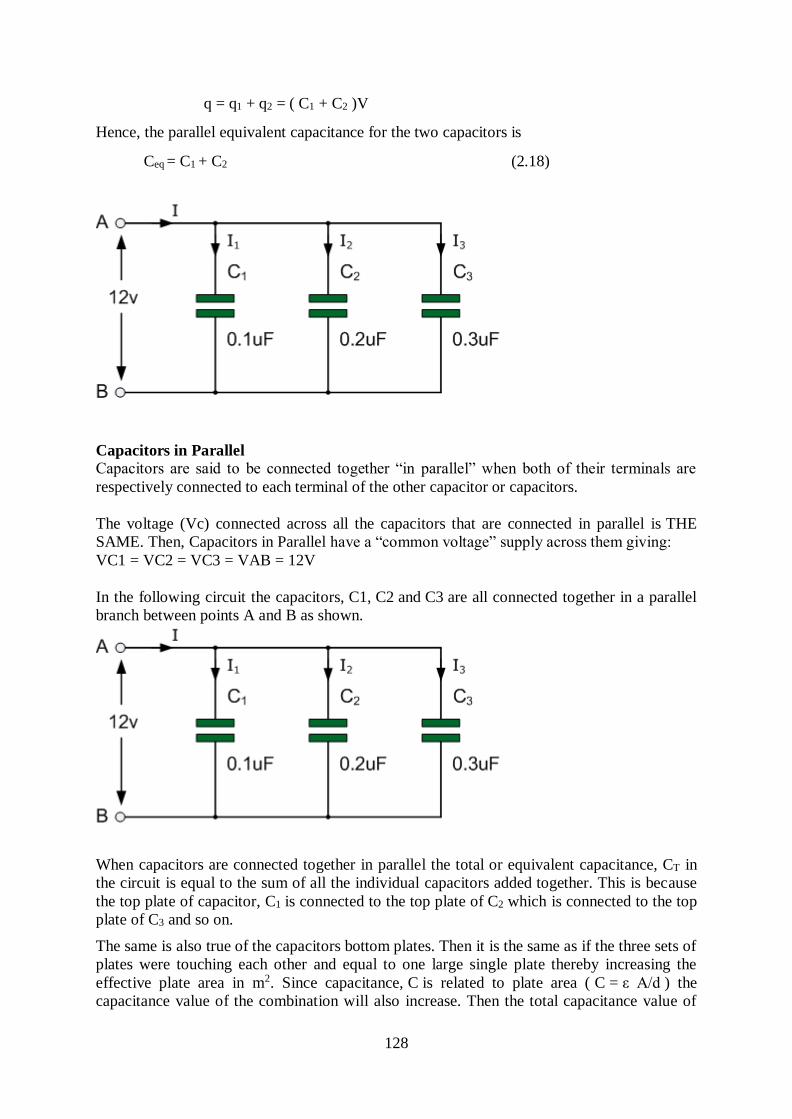
128
q = q1 + q2 = ( C1 + C2 )V
Hence, the parallel equivalent capacitance for the two capacitors is
Ceq = C1 + C2 (2.18)
Capacitors in Parallel
Capacitors are said to be connected together “in parallel” when both of their terminals are
respectively connected to each terminal of the other capacitor or capacitors.
The voltage (Vc) connected across all the capacitors that are connected in parallel is THE
SAME. Then, Capacitors in Parallel have a “common voltage” supply across them giving:
VC1 = VC2 = VC3 = VAB = 12V
In the following circuit the capacitors, C1, C2 and C3 are all connected together in a parallel
branch between points A and B as shown.
When capacitors are connected together in parallel the total or equivalent capacitance, CT in
the circuit is equal to the sum of all the individual capacitors added together. This is because
the top plate of capacitor, C1 is connected to the top plate of C2 which is connected to the top
plate of C3 and so on.
The same is also true of the capacitors bottom plates. Then it is the same as if the three sets of
plates were touching each other and equal to one large single plate thereby increasing the
effective plate area in m2. Since capacitance, C is related to plate area ( C = ε A/d ) the
capacitance value of the combination will also increase. Then the total capacitance value of
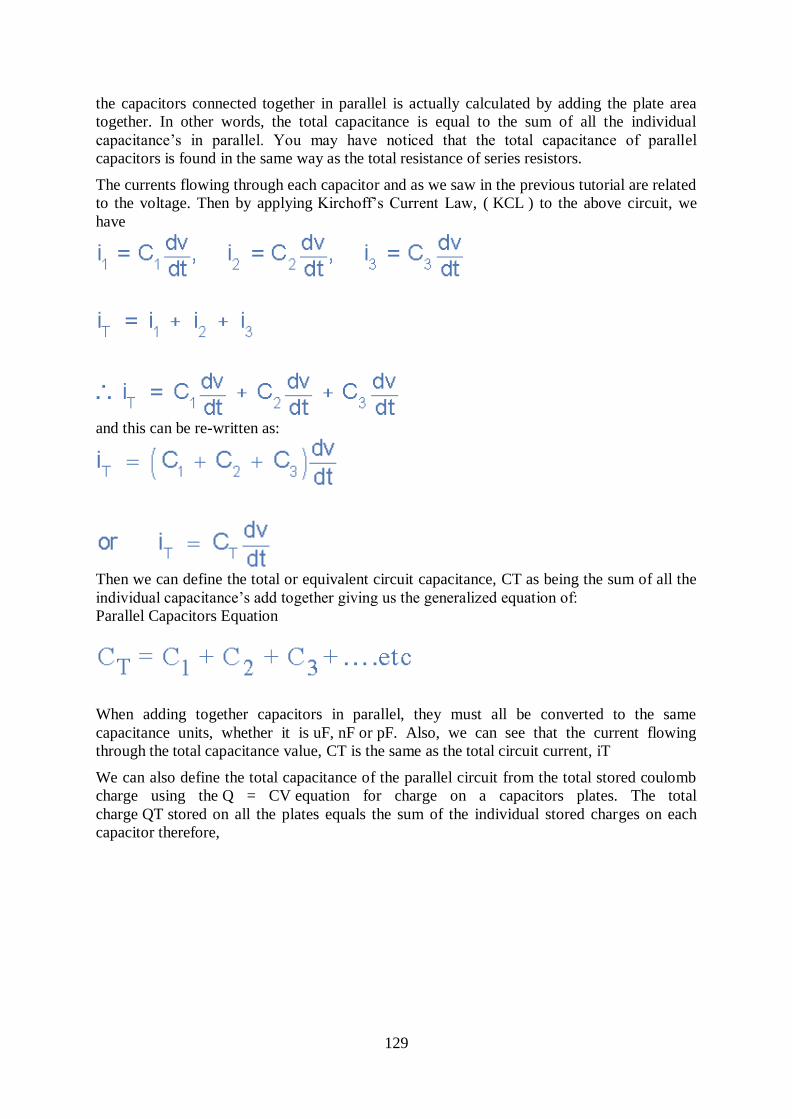
129
the capacitors connected together in parallel is actually calculated by adding the plate area
together. In other words, the total capacitance is equal to the sum of all the individual
capacitance’s in parallel. You may have noticed that the total capacitance of parallel
capacitors is found in the same way as the total resistance of series resistors.
The currents flowing through each capacitor and as we saw in the previous tutorial are related
to the voltage. Then by applying Kirchoff’s Current Law, ( KCL ) to the above circuit, we
have
and this can be re-written as:
Then we can define the total or equivalent circuit capacitance, CT as being the sum of all the
individual capacitance’s add together giving us the generalized equation of:
Parallel Capacitors Equation
When adding together capacitors in parallel, they must all be converted to the same
capacitance units, whether it is uF, nF or pF. Also, we can see that the current flowing
through the total capacitance value, CT is the same as the total circuit current, iT
We can also define the total capacitance of the parallel circuit from the total stored coulomb
charge using the Q = CV equation for charge on a capacitors plates. The total
charge QT stored on all the plates equals the sum of the individual stored charges on each
capacitor therefore,
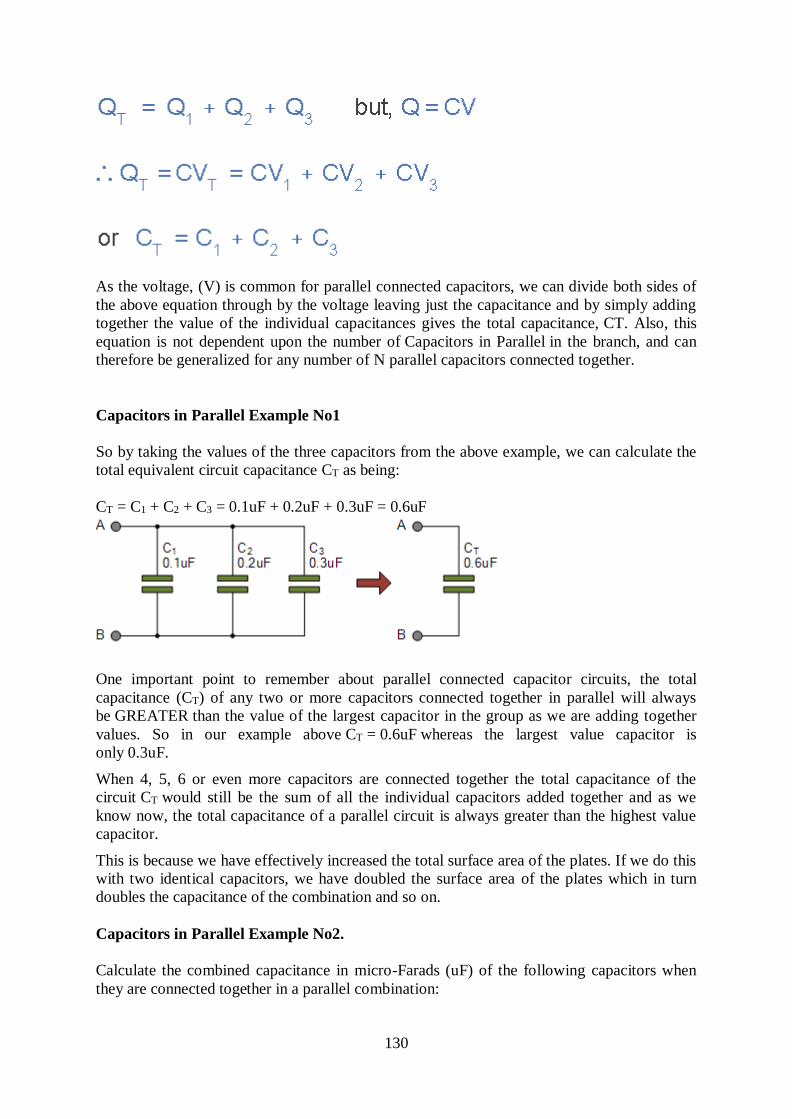
130
As the voltage, (V) is common for parallel connected capacitors, we can divide both sides of
the above equation through by the voltage leaving just the capacitance and by simply adding
together the value of the individual capacitances gives the total capacitance, CT. Also, this
equation is not dependent upon the number of Capacitors in Parallel in the branch, and can
therefore be generalized for any number of N parallel capacitors connected together.
Capacitors in Parallel Example No1
So by taking the values of the three capacitors from the above example, we can calculate the
total equivalent circuit capacitance CT as being:
CT = C1 + C2 + C3 = 0.1uF + 0.2uF + 0.3uF = 0.6uF
One important point to remember about parallel connected capacitor circuits, the total
capacitance (CT) of any two or more capacitors connected together in parallel will always
be GREATER than the value of the largest capacitor in the group as we are adding together
values. So in our example above CT = 0.6uF whereas the largest value capacitor is
only 0.3uF.
When 4, 5, 6 or even more capacitors are connected together the total capacitance of the
circuit CT would still be the sum of all the individual capacitors added together and as we
know now, the total capacitance of a parallel circuit is always greater than the highest value
capacitor.
This is because we have effectively increased the total surface area of the plates. If we do this
with two identical capacitors, we have doubled the surface area of the plates which in turn
doubles the capacitance of the combination and so on.
Capacitors in Parallel Example No2.
Calculate the combined capacitance in micro-Farads (uF) of the following capacitors when
they are connected together in a parallel combination:
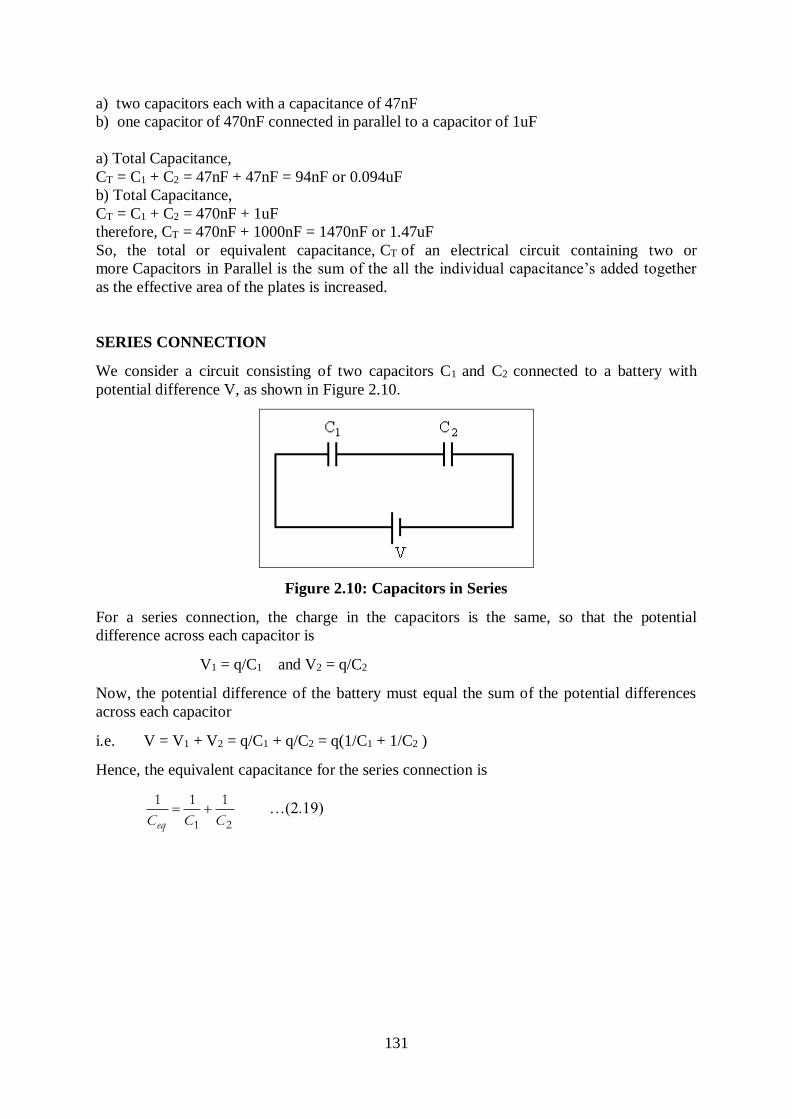
131
a) two capacitors each with a capacitance of 47nF
b) one capacitor of 470nF connected in parallel to a capacitor of 1uF
a) Total Capacitance,
CT = C1 + C2 = 47nF + 47nF = 94nF or 0.094uF
b) Total Capacitance,
CT = C1 + C2 = 470nF + 1uF
therefore, CT = 470nF + 1000nF = 1470nF or 1.47uF
So, the total or equivalent capacitance, CT of an electrical circuit containing two or
more Capacitors in Parallel is the sum of the all the individual capacitance’s added together
as the effective area of the plates is increased.
SERIES CONNECTION
We consider a circuit consisting of two capacitors C1 and C2 connected to a battery with
potential difference V, as shown in Figure 2.10.
Figure 2.10: Capacitors in Series
For a series connection, the charge in the capacitors is the same, so that the potential
difference across each capacitor is
V1 = q/C1 and V2 = q/C2
Now, the potential difference of the battery must equal the sum of the potential differences
across each capacitor
i.e. V = V1 + V2 = q/C1 + q/C2 = q(1/C1 + 1/C2 )
Hence, the equivalent capacitance for the series connection is
1 2
1 1 1
eqC C C …(2.19)
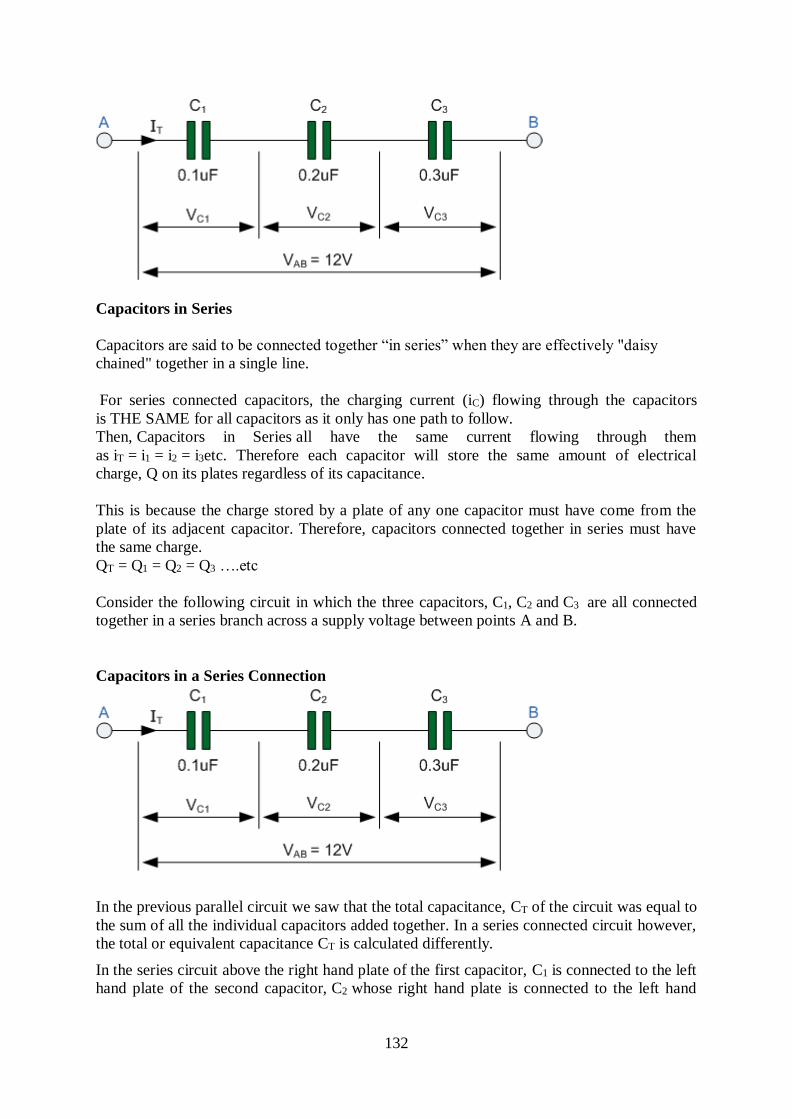
132
Capacitors in Series
Capacitors are said to be connected together “in series” when they are effectively "daisy
chained" together in a single line.
For series connected capacitors, the charging current (iC) flowing through the capacitors
is THE SAME for all capacitors as it only has one path to follow.
Then, Capacitors in Series all have the same current flowing through them
as iT = i1 = i2 = i3etc. Therefore each capacitor will store the same amount of electrical
charge, Q on its plates regardless of its capacitance.
This is because the charge stored by a plate of any one capacitor must have come from the
plate of its adjacent capacitor. Therefore, capacitors connected together in series must have
the same charge.
QT = Q1 = Q2 = Q3 ….etc
Consider the following circuit in which the three capacitors, C1, C2 and C3 are all connected
together in a series branch across a supply voltage between points A and B.
Capacitors in a Series Connection
In the previous parallel circuit we saw that the total capacitance, CT of the circuit was equal to
the sum of all the individual capacitors added together. In a series connected circuit however,
the total or equivalent capacitance CT is calculated differently.
In the series circuit above the right hand plate of the first capacitor, C1 is connected to the left
hand plate of the second capacitor, C2 whose right hand plate is connected to the left hand
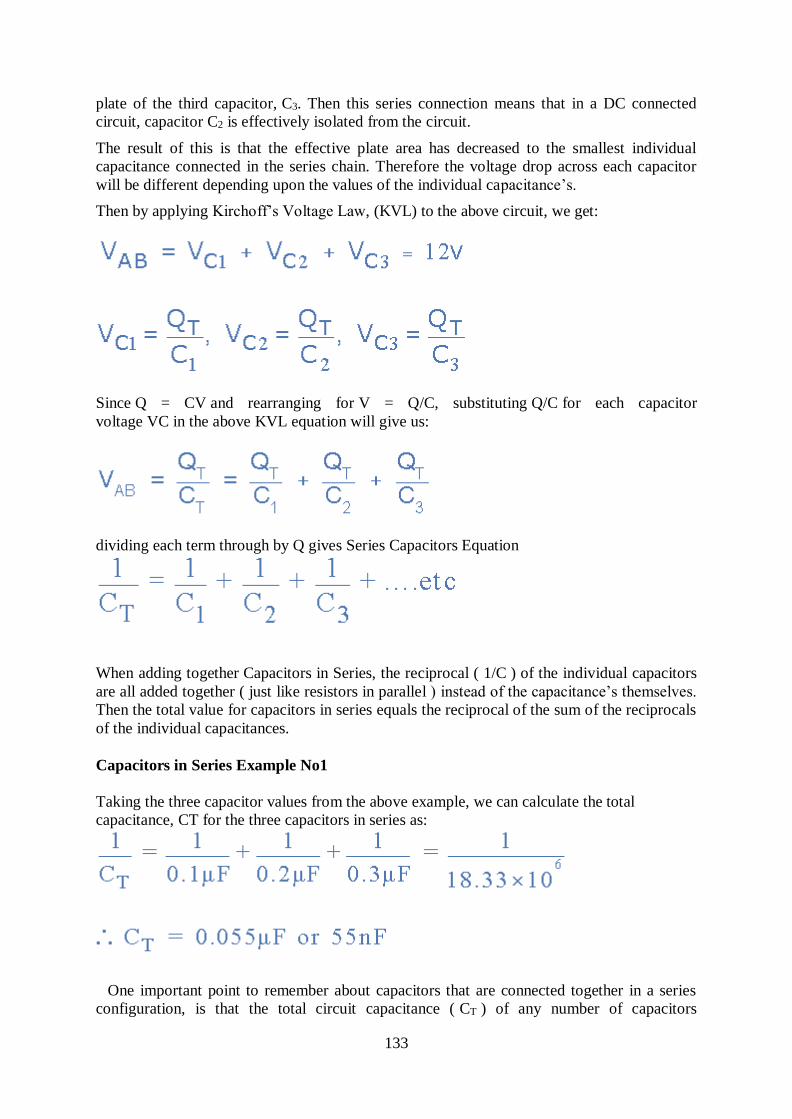
133
plate of the third capacitor, C3. Then this series connection means that in a DC connected
circuit, capacitor C2 is effectively isolated from the circuit.
The result of this is that the effective plate area has decreased to the smallest individual
capacitance connected in the series chain. Therefore the voltage drop across each capacitor
will be different depending upon the values of the individual capacitance’s.
Then by applying Kirchoff’s Voltage Law, (KVL) to the above circuit, we get:
Since Q = CV and rearranging for V = Q/C, substituting Q/C for each capacitor
voltage VC in the above KVL equation will give us:
dividing each term through by Q gives Series Capacitors Equation
When adding together Capacitors in Series, the reciprocal ( 1/C ) of the individual capacitors
are all added together ( just like resistors in parallel ) instead of the capacitance’s themselves.
Then the total value for capacitors in series equals the reciprocal of the sum of the reciprocals
of the individual capacitances.
Capacitors in Series Example No1
Taking the three capacitor values from the above example, we can calculate the total
capacitance, CT for the three capacitors in series as:
One important point to remember about capacitors that are connected together in a series
configuration, is that the total circuit capacitance ( CT ) of any number of capacitors
134
connected together in series will always be LESS than the value of the smallest capacitor in
the series and in our example above CT = 0.055uF with the value of the smallest capacitor in
the series chain is only 0.1uF.
This reciprocal method of calculation can be used for calculating any number of individual
capacitors connected together in a single series network. If however, there are only two
capacitors in series, then a much simpler and quicker formula can be used and is given as:
If the two series connected capacitors are equal and of the same value, that is: C1 = C2, we
can simplify the above equation further as follows to find the total capacitance of the series
combination.
Then we can see that if and only if the two series connected capacitors are the same and
equal, then the total capacitance, CT will be exactly equal to one half of the capacitance value,
that is: C/2.
With series connected resistors, the sum of all the voltage drops across the series circuit will
be equal to the applied voltage VS ( Kirchoff’s Voltage Law ) and this is also true about
capacitors in series.
With series connected capacitors, the capacitive reactance of the capacitor acts as an
impedance due to the frequency of the supply. This capacitive reactance produces a voltage
drop across each capacitor, therefore the series connected capacitors act as a capacitive
voltage divider network.
The result is that the voltage divider formula applied to resistors can also be used to find the
individual voltages for two capacitors in series. Then:
Where: CX is the capacitance of the capacitor in question, VS is the supply voltage across the
series chain and VCX is the voltage drop across the target capacitor.
Capacitors in Series Example No2
Find the overall capacitance and the individual rms voltage drops across the following sets of
two capacitors in series when connected to a 12V a.c. supply.
a) two capacitors each with a capacitance of 47nF
b) one capacitor of 470nF connected in series to a capacitor of 1uF
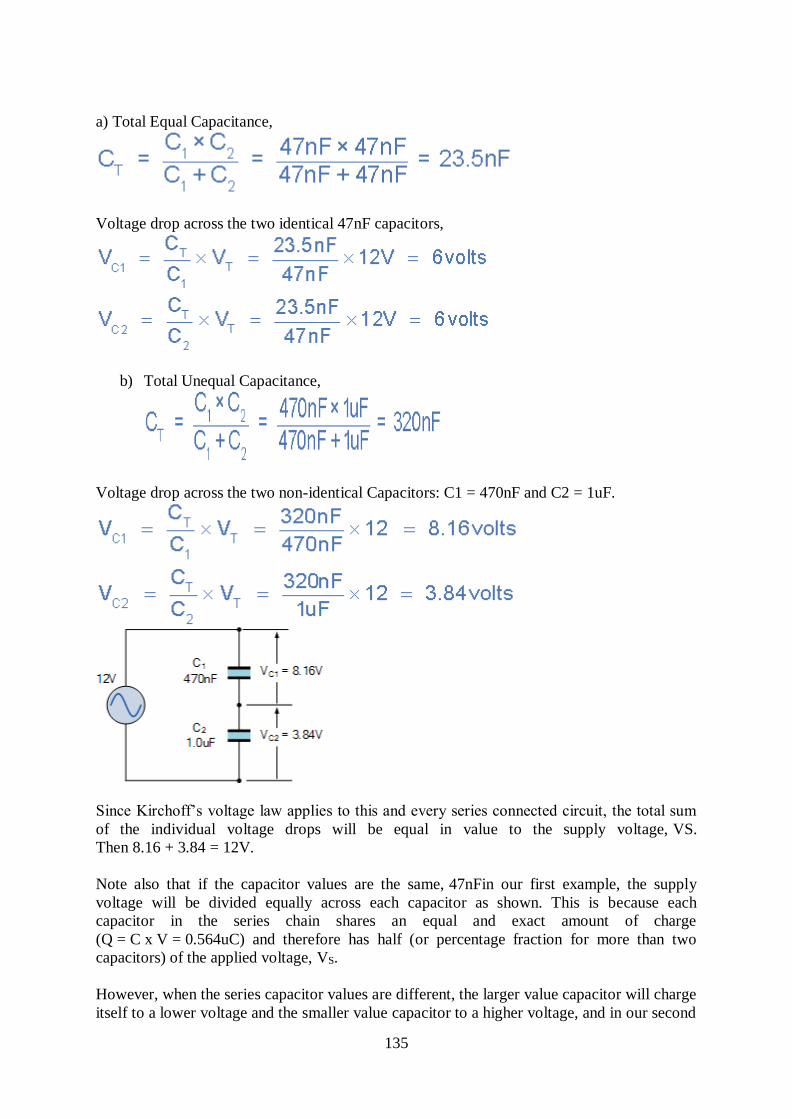
135
a) Total Equal Capacitance,
Voltage drop across the two identical 47nF capacitors,
b) Total Unequal Capacitance,
Voltage drop across the two non-identical Capacitors: C1 = 470nF and C2 = 1uF.
Since Kirchoff’s voltage law applies to this and every series connected circuit, the total sum
of the individual voltage drops will be equal in value to the supply voltage, VS.
Then 8.16 + 3.84 = 12V.
Note also that if the capacitor values are the same, 47nFin our first example, the supply
voltage will be divided equally across each capacitor as shown. This is because each
capacitor in the series chain shares an equal and exact amount of charge
(Q = C x V = 0.564uC) and therefore has half (or percentage fraction for more than two
capacitors) of the applied voltage, VS.
However, when the series capacitor values are different, the larger value capacitor will charge
itself to a lower voltage and the smaller value capacitor to a higher voltage, and in our second
136
example above this was shown to be 3.84 and 8.16 volts respectively. This difference in
voltage allows the capacitors to maintain the same amount of charge, Q on the plates of each
capacitors as shown.
Note that the ratios of the voltage drops across the two capacitors connected in series will
always remain the same regardless of the supply frequency as their reactance, XC will remain
proportionally the same. Then the two voltage drops of 8.16 volts and 3.84 volts above in our
simple example will remain the same even if the supply frequency is increased from 100Hz to
100kHz.
Although the voltage drops across each capacitor will be different for different values of
capacitance, the coulomb charge across the plates will be equal because the same amount of
current flow exists throughout a series circuit as all the capacitors are being supplied with the
same number or quantity of electrons. In other words, if the charge across each capacitors
plates is the same, as Q is constant, then as its capacitance decreases the voltage drop across
the capacitors plates increases, because the charge is large with respect to the capacitance.
Likewise, a larger capacitance will result in a smaller voltage drop across its plates because
the charge is small with respect to the capacitance.
Capacitors in Series Summary
Then to summarise, the total or equivalent capacitance, CT of a circuit containing Capacitors
in Series is the reciprocal of the sum of the reciprocals of all of the individual capacitance’s
added together.
Also for capacitors connected in series, all the series connected capacitors will have the same
charging current flowing through them as iT = i1 = i2 = i3 etc. Two or more capacitors in
series will always have equal amounts of coulomb charge across their plates.
As the charge, (Q) is equal and constant, the voltage drop across the capacitor is determined
by the value of the capacitor only as V = Q ÷ C. A small capacitance value will result in a
larger voltage while a large value of capacitance will result in a smaller voltage drop.
11.6 Energy Storage in an Electric Field
The storage of energy in an electric field is discussed below:
Why does a capacitor allow AC to flow?
Connect a capacitor as shown:
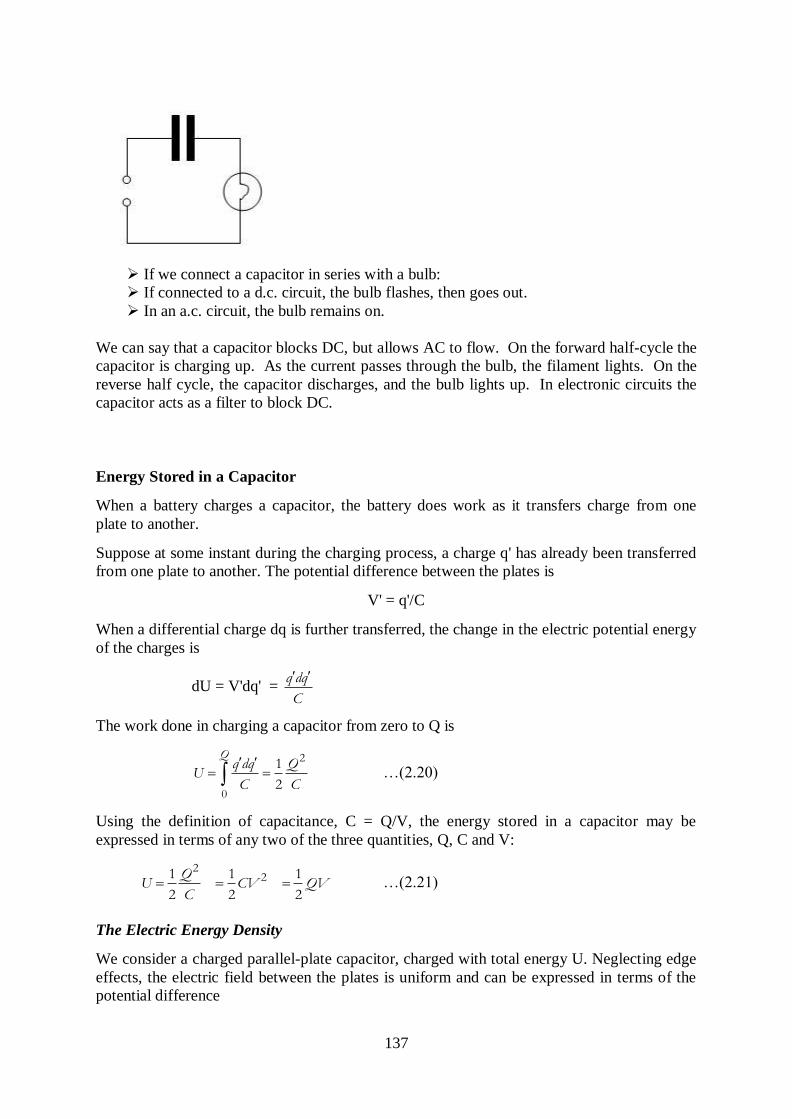
137
If we connect a capacitor in series with a bulb:
If connected to a d.c. circuit, the bulb flashes, then goes out.
In an a.c. circuit, the bulb remains on.
We can say that a capacitor blocks DC, but allows AC to flow. On the forward half-cycle the
capacitor is charging up. As the current passes through the bulb, the filament lights. On the
reverse half cycle, the capacitor discharges, and the bulb lights up. In electronic circuits the
capacitor acts as a filter to block DC.
Energy Stored in a Capacitor
When a battery charges a capacitor, the battery does work as it transfers charge from one
plate to another.
Suppose at some instant during the charging process, a charge q' has already been transferred
from one plate to another. The potential difference between the plates is
V' = q'/C
When a differential charge dq is further transferred, the change in the electric potential energy
of the charges is
dU = V'dq' = q dq
C
The work done in charging a capacitor from zero to Q is
2
0
1
2
Qq dq Q
UC C
…(2.20)
Using the definition of capacitance, C = Q/V, the energy stored in a capacitor may be
expressed in terms of any two of the three quantities, Q, C and V:
2
21 1 1
2 2 2
QU CV QV
C …(2.21)
The Electric Energy Density
We consider a charged parallel-plate capacitor, charged with total energy U. Neglecting edge
effects, the electric field between the plates is uniform and can be expressed in terms of the
potential difference
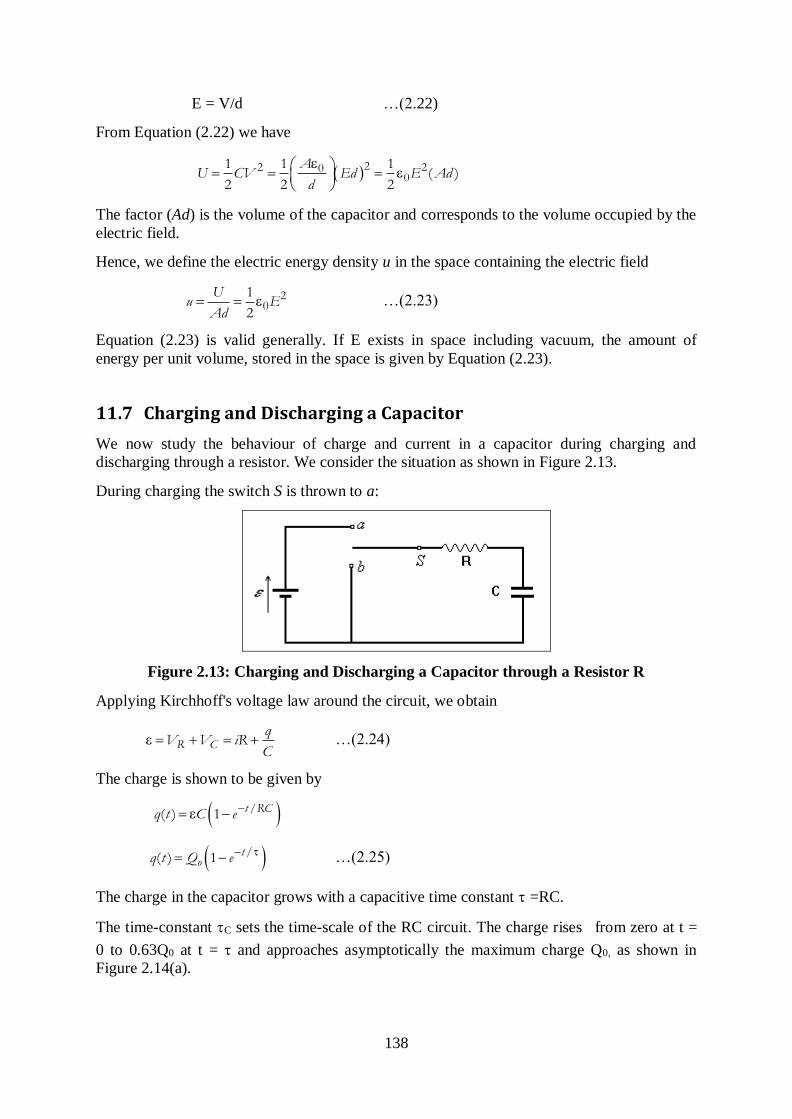
138
E = V/d …(2.22)
From Equation (2.22) we have
22 20
01 1 1
( )2 2 2
AU CV Ed E Ad
d
The factor (Ad) is the volume of the capacitor and corresponds to the volume occupied by the
electric field.
Hence, we define the electric energy density u in the space containing the electric field
20
1
2
Uu E
Ad …(2.23)
Equation (2.23) is valid generally. If E exists in space including vacuum, the amount of
energy per unit volume, stored in the space is given by Equation (2.23).
11.7 Charging and Discharging a Capacitor
We now study the behaviour of charge and current in a capacitor during charging and
discharging through a resistor. We consider the situation as shown in Figure 2.13.
During charging the switch S is thrown to a:
Figure 2.13: Charging and Discharging a Capacitor through a Resistor R
Applying Kirchhoff's voltage law around the circuit, we obtain
R Cq
V V iRC
…(2.24)
The charge is shown to be given by
/( ) 1 t RCq t C e
/( ) 1 toq t Q e …(2.25)
The charge in the capacitor grows with a capacitive time constant =RC.
The time-constant C sets the time-scale of the RC circuit. The charge rises from zero at t =
0 to 0.63Q0 at t = and approaches asymptotically the maximum charge Q0, as shown in
Figure 2.14(a).

139
Figure 2.14(a): Charge Growth in a Charging Capacitor
Figure 2.14(b): Current Decay in a Charging Capacitor
Differentiating Equation (2.32) with respect to t, we obtain the equation for the charging
current
/ /0( ) t RC ti t e i e
R
…(2.32)
Thus the charging current decreases exponentially with a time constant = RC, as shown in
Figure 2.14(b).
During discharging of the capacitor the switch S is disconnected at point a and thrown at
point b.
Applying Kirchhoff's voltage law around the circuit we have
0 0C Rq
V V iRC
….(2.33)
The charge can be shown to be given by
/t RCq Q e …(2.34)
The charge on the capacitor decreases exponentially with time, as shown in Figure 2.15.
The current flowing during discharge is
/0 t RCQdqi edt RC
The current has a negative sign because on discharging, the current direction is no longer
clockwise [Figure 2.15(a)] as was the case during charging.
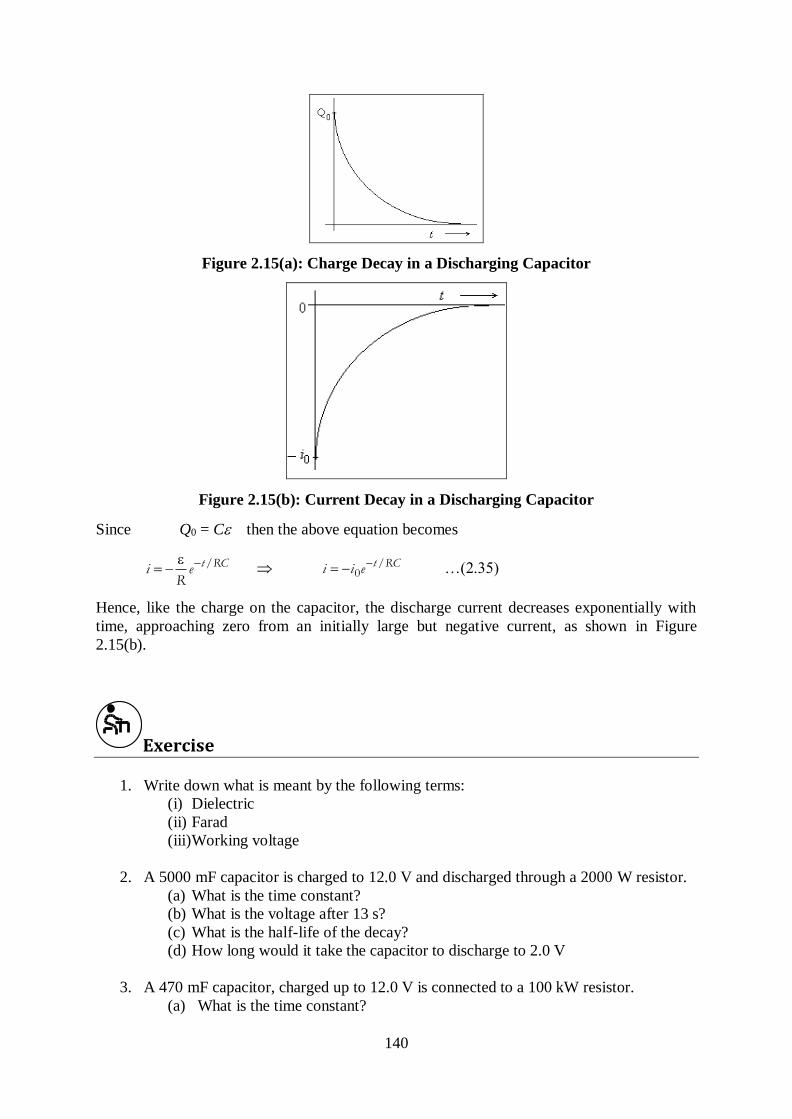
140
Figure 2.15(a): Charge Decay in a Discharging Capacitor
Figure 2.15(b): Current Decay in a Discharging Capacitor
Since Q0 = C then the above equation becomes
/t RCi eR
/0
t RCi i e …(2.35)
Hence, like the charge on the capacitor, the discharge current decreases exponentially with
time, approaching zero from an initially large but negative current, as shown in Figure
2.15(b).
Exercise
1. Write down what is meant by the following terms:
(i) Dielectric
(ii) Farad
(iii)Working voltage
2. A 5000 mF capacitor is charged to 12.0 V and discharged through a 2000 W resistor.
(a) What is the time constant?
(b) What is the voltage after 13 s?
(c) What is the half-life of the decay?
(d) How long would it take the capacitor to discharge to 2.0 V
3. A 470 mF capacitor, charged up to 12.0 V is connected to a 100 kW resistor.
(a) What is the time constant?
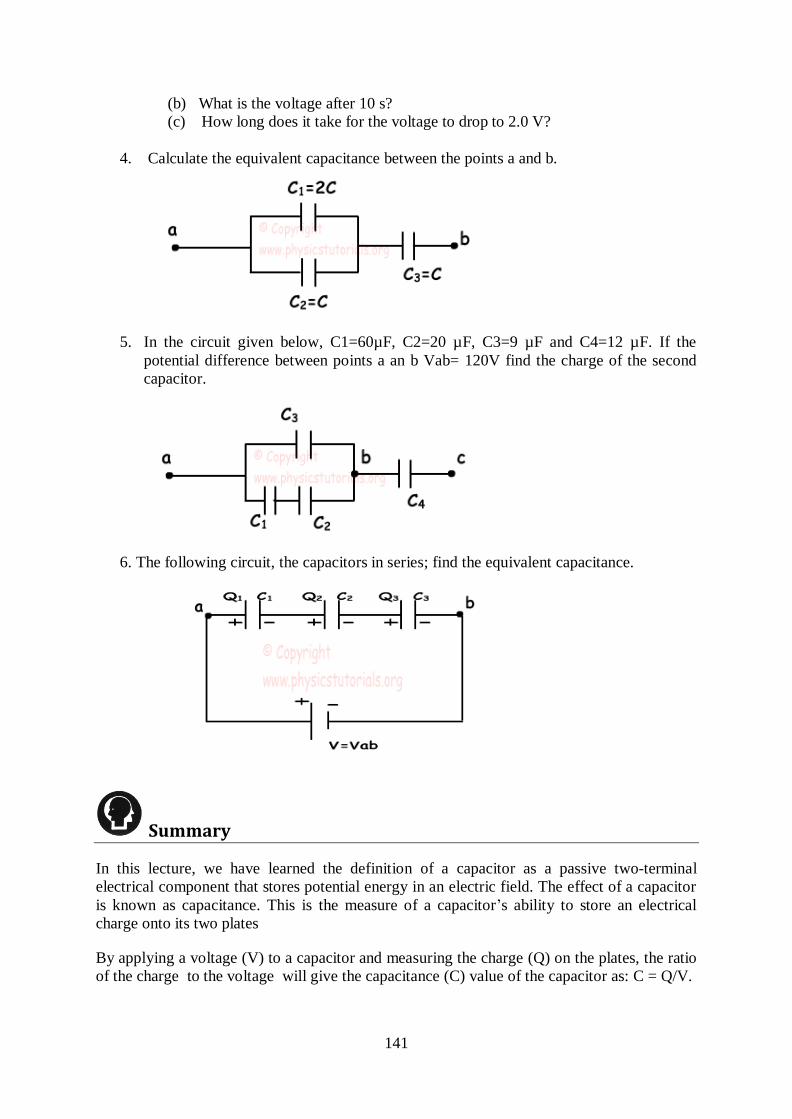
141
(b) What is the voltage after 10 s?
(c) How long does it take for the voltage to drop to 2.0 V?
4. Calculate the equivalent capacitance between the points a and b.
5. In the circuit given below, C1=60µF, C2=20 µF, C3=9 µF and C4=12 µF. If the
potential difference between points a an b Vab= 120V find the charge of the second
capacitor.
6. The following circuit, the capacitors in series; find the equivalent capacitance.
Summary
In this lecture, we have learned the definition of a capacitor as a passive two-terminal
electrical component that stores potential energy in an electric field. The effect of a capacitor
is known as capacitance. This is the measure of a capacitor’s ability to store an electrical
charge onto its two plates
By applying a voltage (V) to a capacitor and measuring the charge (Q) on the plates, the ratio
of the charge to the voltage will give the capacitance (C) value of the capacitor as: C = Q/V.
142
Capacitors are important in two main aspects: Establishment of electrostatic fields for a
variety of purposes and Energy storage. Capacitors can be connected in parallel or series
configurations.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
A.K. Jha (2009). A Textbook of Applied Physics, I.K. International Pub.
143
Lecture 12: Rc Electric Circuits
12.1 Introduction
We now study electric circuits containing only capacitors and resistors as circuit elements.
However, we shall first review the basic laws in analysis of electric circuits. These laws are
referred to as Kirchhoff's laws.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. State and discuss the Kirchhoff’s Laws.
ii. Apply the Kirchhoff's laws to calculate circuit questions.
iii. Discuss the Current Loop Method.
12.2 Kirchhoff’s Laws
Kirchhoff’s Laws are discussed as under:
Kirchhoff’s Current Law
The algebraic sum of currents at any junction (also called a node or Branch point) in a circuit
is zero, i.e.
currents entering a junction = currents leaving the junction
This is basically a statement of conservation of charge.
Kirchhoff's Voltage Law (KVL)
The algebraic sum of potential differences across any closed loop is zero, i.e.
potential drops = emfs
In theory, a straight forward application of Kirchhoff's laws may be used to solve any circuit;
but in practice the method in this form is suitable only for simple circuits for which the
number of unknowns does not exceed three. Then one has to solve at most three simultaneous
equations.
For example, in Figure 2.12, E = 10V, R1 = 5k, R2 = 2k and R3 = 10k ohms to find I1, I2 and
I3.
Applying Kirchhoff's voltage law around loop a we have:
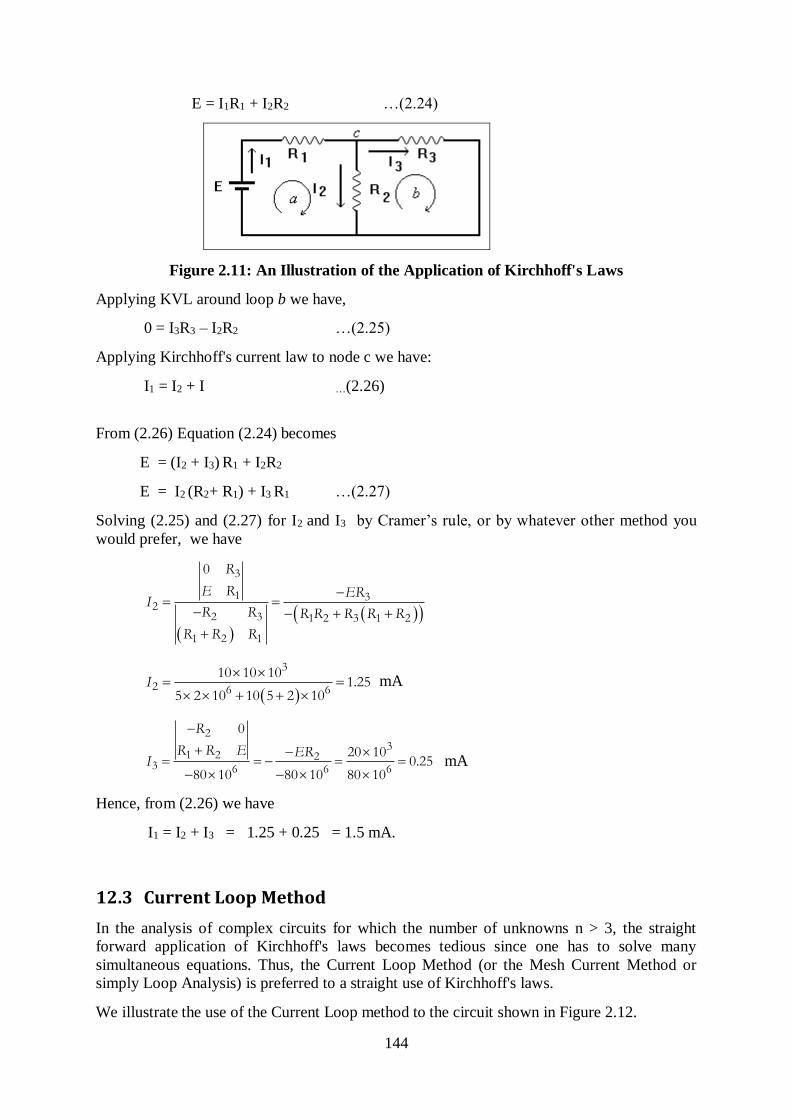
144
E = I1R1 + I2R2 …(2.24)
Figure 2.11: An Illustration of the Application of Kirchhoff's Laws
Applying KVL around loop b we have,
0 = I3R3 – I2R2 …(2.25)
Applying Kirchhoff's current law to node c we have:
I1 = I2 + I …(2.26)
From (2.26) Equation (2.24) becomes
E = (I2 + I3) R1 + I2R2
E = I2 (R2+ R1) + I3 R1 …(2.27)
Solving (2.25) and (2.27) for I2 and I3 by Cramer’s rule, or by whatever other method you
would prefer, we have
3
1 32
2 3 1 2 3 1 2
1 2 1
0 R
E R ERI
R R R R R R R
R R R
3
2 6 6
10 10 101.25
5 2 10 10 5 2 10I mA
23
1 2 23 6 6 6
0
20 100.25
80 10 80 10 80 10
R
R R E ERI mA
Hence, from (2.26) we have
I1 = I2 + I3 = 1.25 + 0.25 = 1.5 mA.
12.3 Current Loop Method
In the analysis of complex circuits for which the number of unknowns n > 3, the straight
forward application of Kirchhoff's laws becomes tedious since one has to solve many
simultaneous equations. Thus, the Current Loop Method (or the Mesh Current Method or
simply Loop Analysis) is preferred to a straight use of Kirchhoff's laws.
We illustrate the use of the Current Loop method to the circuit shown in Figure 2.12.

145
The procedure for use of the Current Loop method is as follows:
i. Draw loop currents around any complete loop, the direction of current is arbitrary.
Indicate the polarities of the potential drops across each resistance in accordance with the chosen
current direction, using the convention that the positive polarity of an IR drop across a
resistor is at the point where the current enters the resistor.
Apply KVL around each loop.
Following this procedure the circuit in Figure 2.12 takes the form shown in Figure 2.13.
Figure 2.12: An Illustration of the Current Loop Method
Whereas the straight use of Kirchhoff’s laws (Figure 2.12) involved three unknowns, namely
I1, I2, and I3, the Current Loop method (Figure 2.13) has reduced the number of unknowns to
two, viz. Ia and Ib.
KVL applied to loop a:
1 2 2a bE I R R I R …(2.28)
KVL applied to loop b:
2 2 30 a bI R I R R …(2.29)
Solving for Ia and Ib we have,
Ia = 1.5 mA and Ib = 0.25 mA.
The currents in each resistor are obtained from Ia and Ib,
i.e. I1 =Ia = 1.5 mA, I2 = (Ia – Ib) = 1.5 – 0.25 = 1.25 mA and I3 = Ib = 0.25 mA.
We now consider a circuit consisting of a resistor R in series with a capacitor C, as shown in
Figure 2.13. The circuit can be used either for charging or discharging the capacitor through
the resistor R.
You will observe that an RC circuit connected to a DC supply, sustains only a temporary or
transient current, which is initially large but decays exponentially to zero as the capacitor
charges up. The time scale of the charging current is governed by the capacitive time constant
RC.

146
Activity
Inflate a balloon and tie the end. Sprinkle a small amount of salt and pepper
on a sheet of paper or on your desk top. Rub the balloon with the cloth.
Bring the balloon within about an inch or two of the salt and pepper.
Observe for a minute or two. You will notice that the same grains of salt and
pepper are attracted to the balloon, repelled, and then attracted again over
and over. Explain what is happening and why?
Summary
All forces that one encounters in materials, whether binding or contact, are electrical
in nature and therefore they are Coulomb derived forces.
The electric potential describes the amount of potential energy stored in each point of
an electric field.
The electric potential difference between two points B and A is the work done against
the electric field in taking unit positive charge from A to B .
The capacitance of a conductor is defined as the amount of charge that must be placed
on the conductor to raise its electric potential by one volt.
Kirchhoff’s Current Law: The algebraic sum of currents at any junction in a circuit is
zero.
Kirchhoff's Voltage Law: The algebraic sum of potential differences across any closed
loop is zero.
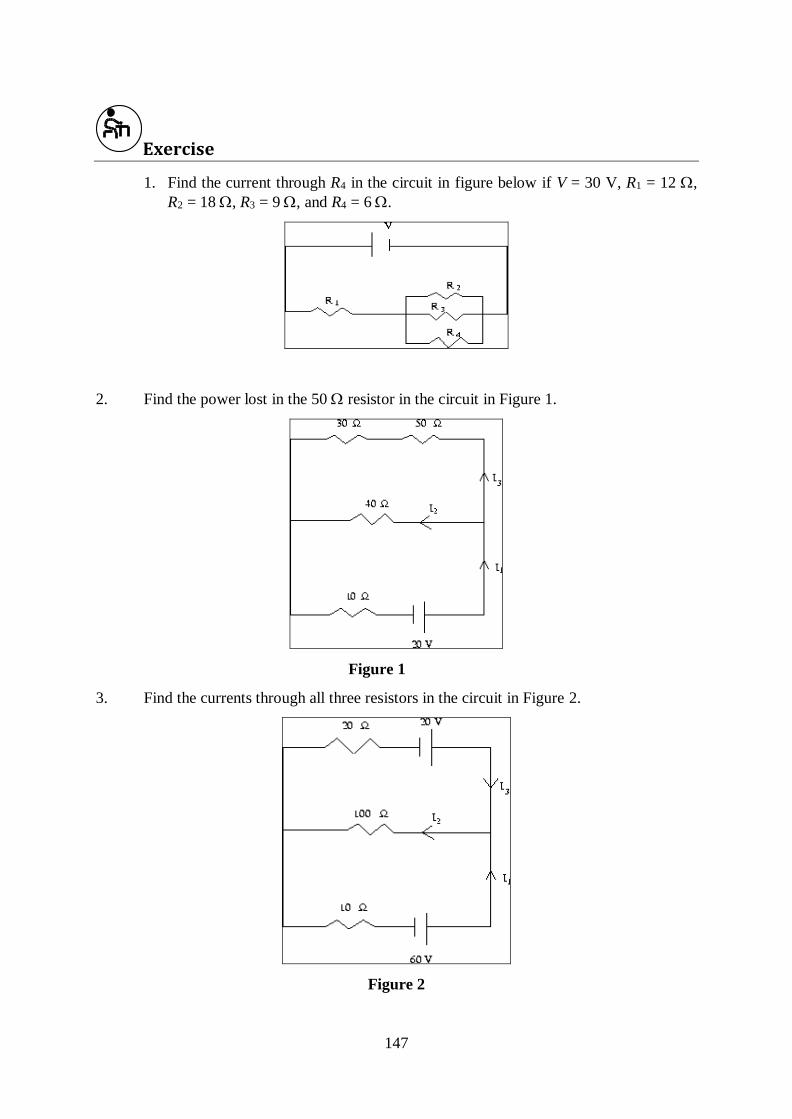
147
Exercise 1. Find the current through R4 in the circuit in figure below if V = 30 V, R1 = 12 ,
R2 = 18 , R3 = 9 , and R4 = 6 .
2. Find the power lost in the 50 resistor in the circuit in Figure 1.
Figure 1
3. Find the currents through all three resistors in the circuit in Figure 2.
Figure 2
148
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
A.K. Jha (2009). A Textbook of Applied Physics, I.K. International Pub.
E.F. Redish (2003). Teaching Introductory Physics with the Physics Suite, John Wiley
& Sons.
Hilary D. Brewster (2009). Electrostatics. Oxford Book Company.
149
SECTION FOUR: ELECTROMAGNETISM
Lecture 13: The Magnetic Field
13.1 Introduction
Iron fillings sprinkled loosely onto a sheet of paper, under which there is a bar magnet, will
form themselves into a regular pattern.
A similar pattern is obtained when the bar magnet is replaced by a loop of wire carrying a
direct current, provided that the plane of the loop is at right angle to the axis of the magnet.
The space around a permanent magnet or a current-carrying conductor is described to be the
location of a magnetic field. The magnitude and the direction of the magnetic field are
indicated by the vector B.
There is not general agreement on the naming of field vectors in magnetism. B may be called
the magnetic induction or magnetic flux density, while another field vector denoted by H is
called the magnetic field intensity.
Generally, B is regarded to be more fundamental than H and hence B is called the magnetic
field. In this course, the vector field B shall be called the magnetic field.
Unlike the electric field E whose origin is the electric charge, the magnetic field does not
originate from magnetic charges which are also called magnetic monopoles, (these do not
exist) instead B originates from moving electric charges.
A moving electric point charge or an electric current sets up a magnetic field, which in turn
can exert a magnetic force on other moving electric point charges or currents.
Lecture Objectives
At the end of this lecture, you should be able to:
i. Define the magnetic field
ii. Describe magnetic field lines
State the magnetic force on a moving electric point charge
Compute the magnetic force on a current-carrying conductor
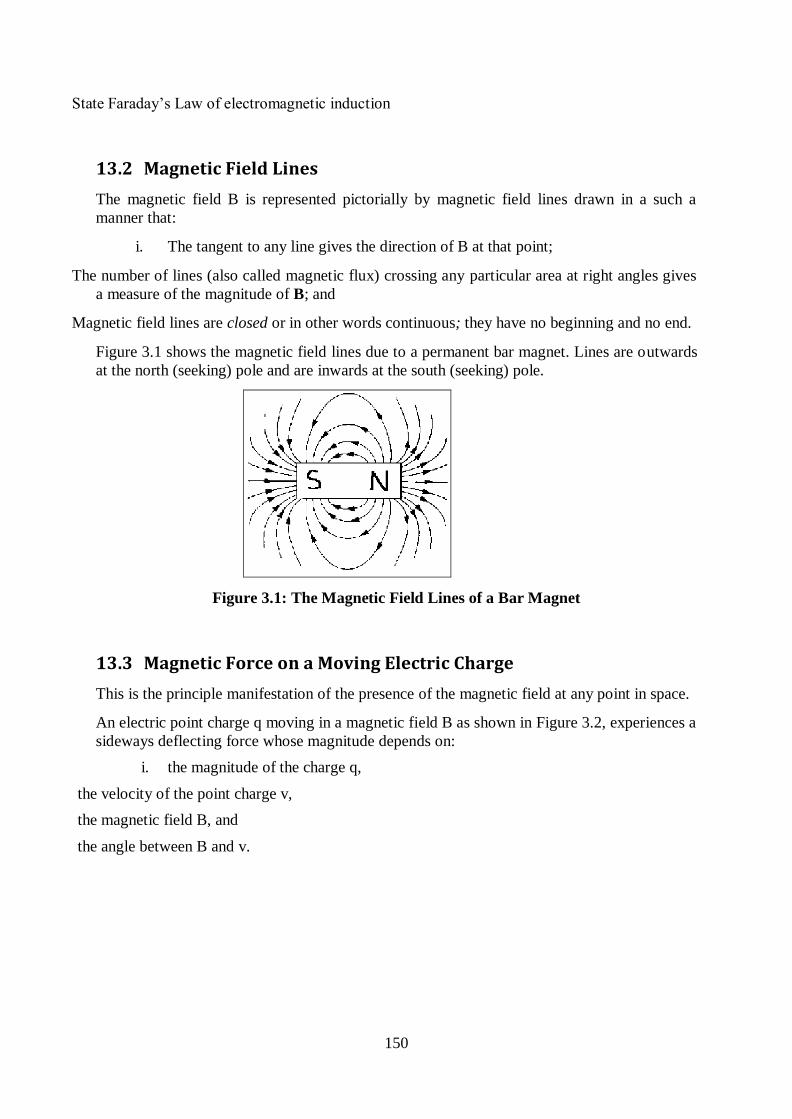
150
State Faraday’s Law of electromagnetic induction
13.2 Magnetic Field Lines
The magnetic field B is represented pictorially by magnetic field lines drawn in a such a
manner that:
i. The tangent to any line gives the direction of B at that point;
The number of lines (also called magnetic flux) crossing any particular area at right angles gives
a measure of the magnitude of B; and
Magnetic field lines are closed or in other words continuous; they have no beginning and no end.
Figure 3.1 shows the magnetic field lines due to a permanent bar magnet. Lines are outwards
at the north (seeking) pole and are inwards at the south (seeking) pole.
Figure 3.1: The Magnetic Field Lines of a Bar Magnet
13.3 Magnetic Force on a Moving Electric Charge
This is the principle manifestation of the presence of the magnetic field at any point in space.
An electric point charge q moving in a magnetic field B as shown in Figure 3.2, experiences a
sideways deflecting force whose magnitude depends on:
i. the magnitude of the charge q,
the velocity of the point charge v,
the magnetic field B, and
the angle between B and v.
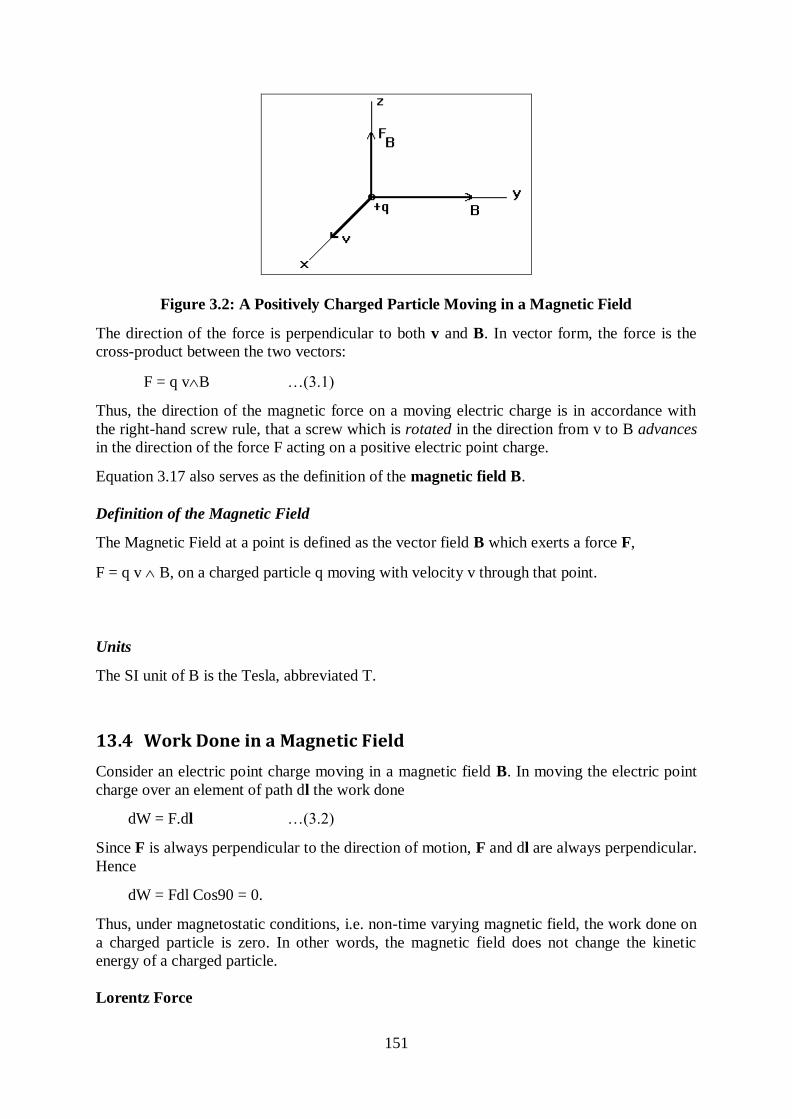
151
Figure 3.2: A Positively Charged Particle Moving in a Magnetic Field
The direction of the force is perpendicular to both v and B. In vector form, the force is the
cross-product between the two vectors:
F = q vB …(3.1)
Thus, the direction of the magnetic force on a moving electric charge is in accordance with
the right-hand screw rule, that a screw which is rotated in the direction from v to B advances
in the direction of the force F acting on a positive electric point charge.
Equation 3.17 also serves as the definition of the magnetic field B.
Definition of the Magnetic Field
The Magnetic Field at a point is defined as the vector field B which exerts a force F,
F = q v B, on a charged particle q moving with velocity v through that point.
Units
The SI unit of B is the Tesla, abbreviated T.
13.4 Work Done in a Magnetic Field
Consider an electric point charge moving in a magnetic field B. In moving the electric point
charge over an element of path dl the work done
dW = F.dl …(3.2)
Since F is always perpendicular to the direction of motion, F and dl are always perpendicular.
Hence
dW = Fdl Cos90 = 0.
Thus, under magnetostatic conditions, i.e. non-time varying magnetic field, the work done on
a charged particle is zero. In other words, the magnetic field does not change the kinetic
energy of a charged particle.
Lorentz Force
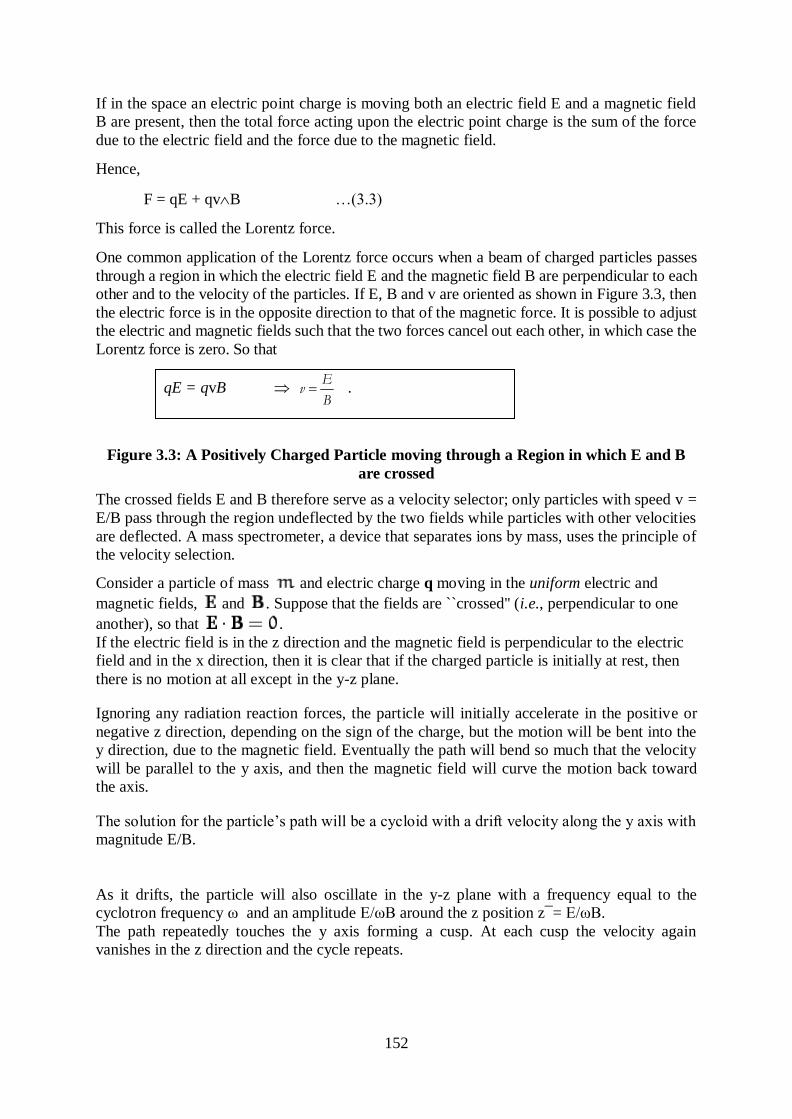
152
If in the space an electric point charge is moving both an electric field E and a magnetic field
B are present, then the total force acting upon the electric point charge is the sum of the force
due to the electric field and the force due to the magnetic field.
Hence,
F = qE + qvB …(3.3)
This force is called the Lorentz force.
One common application of the Lorentz force occurs when a beam of charged particles passes
through a region in which the electric field E and the magnetic field B are perpendicular to each
other and to the velocity of the particles. If E, B and v are oriented as shown in Figure 3.3, then
the electric force is in the opposite direction to that of the magnetic force. It is possible to adjust
the electric and magnetic fields such that the two forces cancel out each other, in which case the
Lorentz force is zero. So that
qE = qvB E
vB
.
Figure 3.3: A Positively Charged Particle moving through a Region in which E and B
are crossed
The crossed fields E and B therefore serve as a velocity selector; only particles with speed v =
E/B pass through the region undeflected by the two fields while particles with other velocities
are deflected. A mass spectrometer, a device that separates ions by mass, uses the principle of
the velocity selection.
Consider a particle of mass and electric charge q moving in the uniform electric and
magnetic fields, and . Suppose that the fields are ``crossed'' (i.e., perpendicular to one
another), so that .
If the electric field is in the z direction and the magnetic field is perpendicular to the electric
field and in the x direction, then it is clear that if the charged particle is initially at rest, then
there is no motion at all except in the y-z plane.
Ignoring any radiation reaction forces, the particle will initially accelerate in the positive or
negative z direction, depending on the sign of the charge, but the motion will be bent into the
y direction, due to the magnetic field. Eventually the path will bend so much that the velocity
will be parallel to the y axis, and then the magnetic field will curve the motion back toward
the axis.
The solution for the particle’s path will be a cycloid with a drift velocity along the y axis with
magnitude E/B.
As it drifts, the particle will also oscillate in the y-z plane with a frequency equal to the
cyclotron frequency ω and an amplitude E/ωB around the z position z¯= E/ωB.
The path repeatedly touches the y axis forming a cusp. At each cusp the velocity again
vanishes in the z direction and the cycle repeats.

153
Charged Particle Motion in Electric and Magnetic Fields
The force acting on the particle is given by the familiar Lorentz law:
(194)
where is the particle's instantaneous velocity. Hence, from Newton's second law, the
particle's equation of motion can be written
(195)
It turns out that we can eliminate the electric field from the above equation by transforming to
a different inertial frame. Thus, writing
(196)
Equation (195) reduces to
13.5 Magnetic Force on a Conductor Carrying a Current
As a consequence of the magnetic force on moving electric charged particles, a straight wire
of length l carrying a current I placed in a magnetic field B, experiences a sideways force
F = I lB …(3.4)
where l is the displacement vector whose direction is the same as that of the current I.
When the conducting wire is non-linear, i.e. not straight, or the magnetic field is not uniform,
we divide the wire into small segments each of length, say dl such that over the length of each
segment, the conditions of linearity of the conductor and uniformity of the magnetic field are
fulfilled, then the magnetic force on a differential element of the conductor of length dl
becomes
dF = I dlB …(3.5)
The total force on a segment of length L is then obtained by a suitable integration over the
length L.
Technological Applications
The magnetic force on a moving charge, current carrying conductor is the basis for mass
spectrometry, electric motors, speakers, etc.
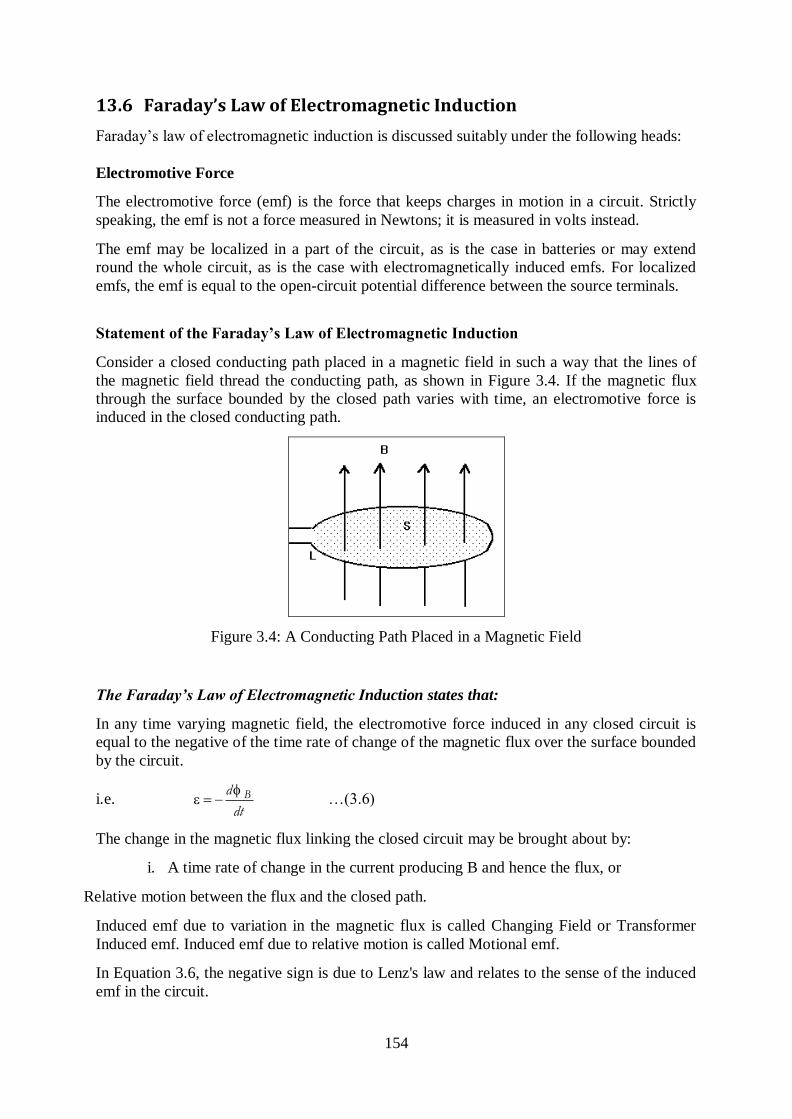
154
13.6 Faraday’s Law of Electromagnetic Induction
Faraday’s law of electromagnetic induction is discussed suitably under the following heads:
Electromotive Force
The electromotive force (emf) is the force that keeps charges in motion in a circuit. Strictly
speaking, the emf is not a force measured in Newtons; it is measured in volts instead.
The emf may be localized in a part of the circuit, as is the case in batteries or may extend
round the whole circuit, as is the case with electromagnetically induced emfs. For localized
emfs, the emf is equal to the open-circuit potential difference between the source terminals.
Statement of the Faraday’s Law of Electromagnetic Induction
Consider a closed conducting path placed in a magnetic field in such a way that the lines of
the magnetic field thread the conducting path, as shown in Figure 3.4. If the magnetic flux
through the surface bounded by the closed path varies with time, an electromotive force is
induced in the closed conducting path.
Figure 3.4: A Conducting Path Placed in a Magnetic Field
The Faraday’s Law of Electromagnetic Induction states that:
In any time varying magnetic field, the electromotive force induced in any closed circuit is
equal to the negative of the time rate of change of the magnetic flux over the surface bounded
by the circuit.
i.e.
Bd
dt …(3.6)
The change in the magnetic flux linking the closed circuit may be brought about by:
i. A time rate of change in the current producing B and hence the flux, or
Relative motion between the flux and the closed path.
Induced emf due to variation in the magnetic flux is called Changing Field or Transformer
Induced emf. Induced emf due to relative motion is called Motional emf.
In Equation 3.6, the negative sign is due to Lenz's law and relates to the sense of the induced
emf in the circuit.
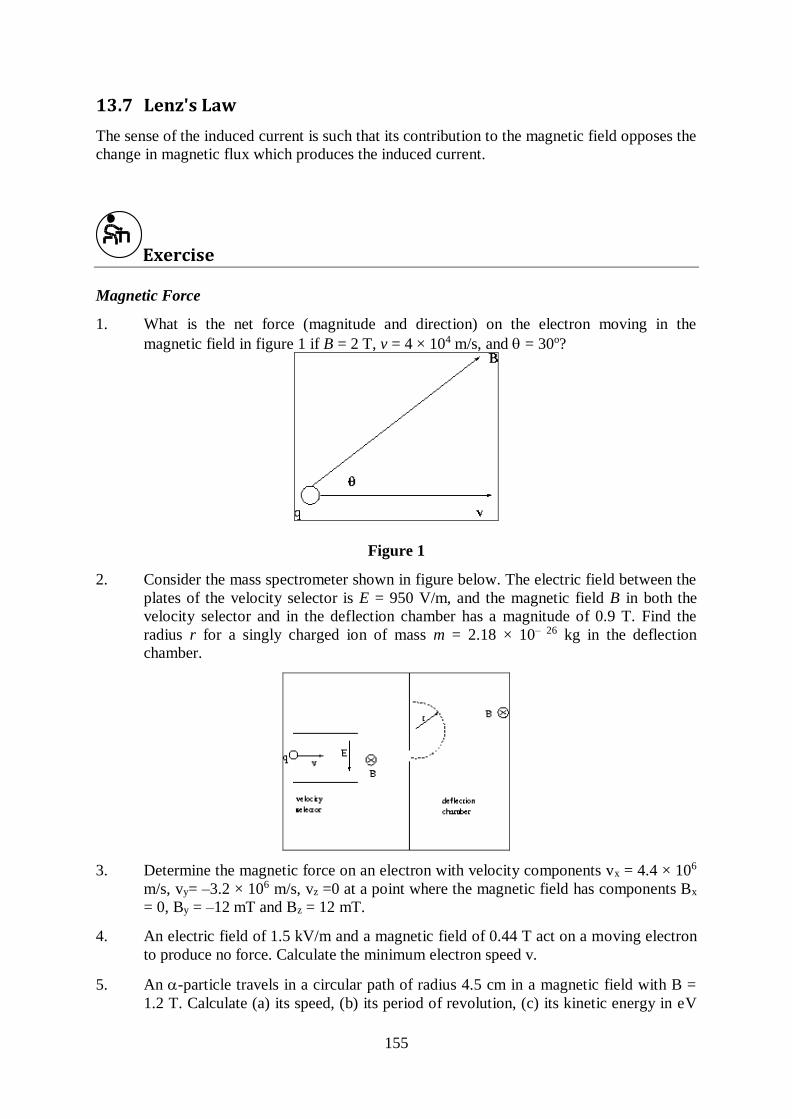
155
13.7 Lenz's Law
The sense of the induced current is such that its contribution to the magnetic field opposes the
change in magnetic flux which produces the induced current.
Exercise
Magnetic Force
1. What is the net force (magnitude and direction) on the electron moving in the
magnetic field in figure 1 if B = 2 T, v = 4 × 104 m/s, and = 30o?
Figure 1
2. Consider the mass spectrometer shown in figure below. The electric field between the
plates of the velocity selector is E = 950 V/m, and the magnetic field B in both the
velocity selector and in the deflection chamber has a magnitude of 0.9 T. Find the
radius r for a singly charged ion of mass m = 2.18 × 10– 26 kg in the deflection
chamber.
3. Determine the magnetic force on an electron with velocity components vx = 4.4 × 106
m/s, vy= –3.2 × 106 m/s, vz =0 at a point where the magnetic field has components Bx
= 0, By = –12 mT and Bz = 12 mT.
4. An electric field of 1.5 kV/m and a magnetic field of 0.44 T act on a moving electron
to produce no force. Calculate the minimum electron speed v.
5. An -particle travels in a circular path of radius 4.5 cm in a magnetic field with B =
1.2 T. Calculate (a) its speed, (b) its period of revolution, (c) its kinetic energy in eV
156
and (d) the potential difference through which it would have to be accelerated to
achieve this energy.
Faraday’s Law
6. A small loop of area A is inside, and has its axis in the same direction as a long
solenoid of n turns per unit length and current i. If i = io sin wt, find the emf in the
loop, given that the magnetic field inside a solenoid is given by B = 0ni.
7. A uniform magnetic field B is perpendicular to the plane of a circular wire loop of
radius r. The magnitude of the field varies with time according 0
tB B e , where Bo
and τ are constants. Find the emf in the loop as a function of time.
8. The magnetic flux through a loop of resistance R increases according to the relation
2( ) 6.0 7.0B t t t ,
where ΦB is in milliwebers and t is in seconds. What is the magnitude of the emf
induced in the loop when t = 2.0 s?
Summary
In this lecture, we have learned that a magnetic field is a vector field that describes the
magnetic influence of electrical currents and magnetized materials. A moving electric point
charge or an electric current sets up a magnetic field, which in turn can exert a magnetic force
on other moving electric point charges or currents. The direction of the magnetic force on a
moving electric charge is in accordance with the right-hand screw rule. Under magnetostatic
conditions, i.e. non-time varying magnetic field, the work done on a charged particle is zero.
In other words, the magnetic field does not change the kinetic energy of a charged particle.
The electromotive force (emf) is the force that keeps charges in motion in a circuit. Strictly
speaking, the emf is not a force measured in Newtons; it is measured in volts instead. We
have also discussed the Faraday’s Law of Electromagnetic Inductionand its applications.
References
Halliday, D., Resnick, R. and Krane, K.S. (1992). Physics Volume II, Fourth Edition,
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J. (1989). Physics Classical and Modern,
McGraw Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
E.F. Redish (2003). Teaching Introductory Physics with the Physics Suite, John Wiley
& Sons.
Kiwanga, C.A. (1994). OPH 105: Electromagnetism II, OUT
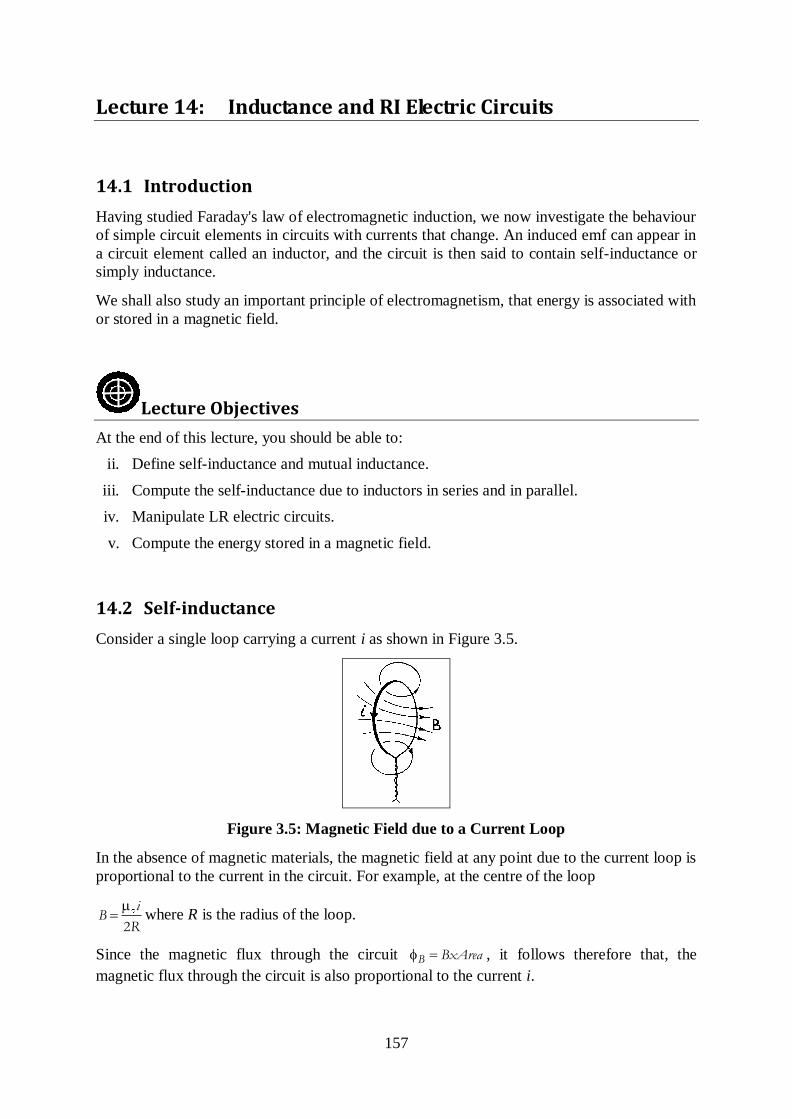
157
Lecture 14: Inductance and RI Electric Circuits
14.1 Introduction
Having studied Faraday's law of electromagnetic induction, we now investigate the behaviour
of simple circuit elements in circuits with currents that change. An induced emf can appear in
a circuit element called an inductor, and the circuit is then said to contain self-inductance or
simply inductance.
We shall also study an important principle of electromagnetism, that energy is associated with
or stored in a magnetic field.
Lecture Objectives At the end of this lecture, you should be able to:
ii. Define self-inductance and mutual inductance.
iii. Compute the self-inductance due to inductors in series and in parallel.
iv. Manipulate LR electric circuits.
v. Compute the energy stored in a magnetic field.
14.2 Self-inductance
Consider a single loop carrying a current i as shown in Figure 3.5.
Figure 3.5: Magnetic Field due to a Current Loop
In the absence of magnetic materials, the magnetic field at any point due to the current loop is
proportional to the current in the circuit. For example, at the centre of the loop
2
iB
Rwhere R is the radius of the loop.
Since the magnetic flux through the circuit B BxArea , it follows therefore that, the
magnetic flux through the circuit is also proportional to the current i.

158
Definition of Self-inductance
The self-inductance L of a circuit of a given shape is defined as the ratio of the magnetic flux
through the circuit to the current in the circuit, so that
i = Li …(3.7)
where L is a constant for a circuit of given shape and size.
When the circuit is a coil consisting of several turns, say N turns, it is assumed that the
magnetic flux has the same value for each of the N turns of the coil. The product N is known
as the number of flux linkages of the coil. For such a coil, Equation (3.7) becomes
Ni = Li.
Units of Inductance
From Equation (3.7), we have L = i
iWb/A or H (Henry).
The Henry is a fairly large unit; in practical circuit elements, values of inductance of coils are
typically in the range 1 H to 1 mH.
Circuit Application
If the current i in the rigid circuit changes with time, then i will also change with time and so
an emf will be induced in the circuit.
Ld di
Ldt dt
......(3.8)
The negative sign, which is due to Lenz's law, indicates that when the current increases, the
self-induced emf becomes negative. Thus, the induced emf is opposed to the change in the
current and hence gives rise to a reactance.
When a device is constructed to embody self-inductance, it is known as an inductor and has
the symbol in a circuit diagram as shown in Figure 3.6(a) which resembles the shape of a
solenoid. When the inductor is variable the symbol is crossed as shown in Figure 3.6(b), and
when it has a ferromagnetic core it has parallel lines adjacent to it as shown in Figure 3.6(c).
Figure 3.6(a): A Circuit Symbol of an Inductor
Figure 3.6(b): A Circuit Symbol of a Variable Inductor
Figure 3.6(c): A Circuit Symbol of an Inductor with a Ferromagnetic Core
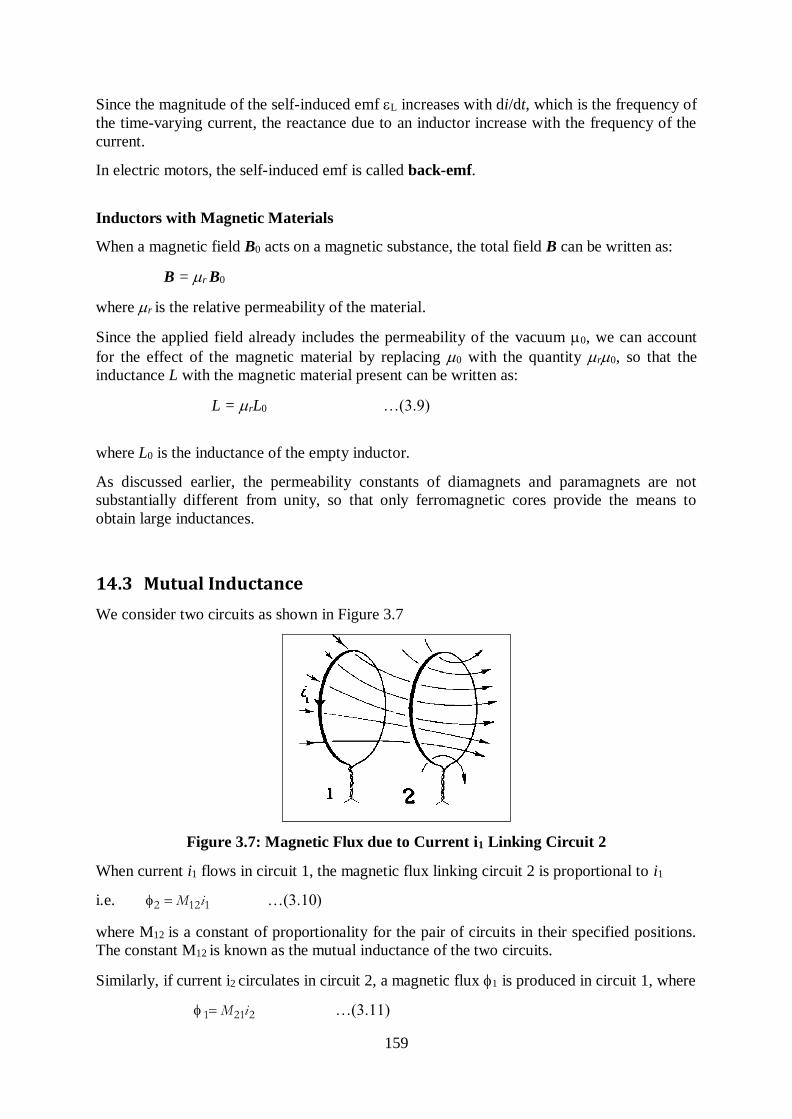
159
Since the magnitude of the self-induced emf L increases with di/dt, which is the frequency of
the time-varying current, the reactance due to an inductor increase with the frequency of the
current.
In electric motors, the self-induced emf is called back-emf.
Inductors with Magnetic Materials
When a magnetic field B0 acts on a magnetic substance, the total field B can be written as:
B = r B0
where r is the relative permeability of the material.
Since the applied field already includes the permeability of the vacuum 0, we can account
for the effect of the magnetic material by replacing 0 with the quantity r0, so that the
inductance L with the magnetic material present can be written as:
L = rL0 …(3.9)
where L0 is the inductance of the empty inductor.
As discussed earlier, the permeability constants of diamagnets and paramagnets are not
substantially different from unity, so that only ferromagnetic cores provide the means to
obtain large inductances.
14.3 Mutual Inductance
We consider two circuits as shown in Figure 3.7
Figure 3.7: Magnetic Flux due to Current i1 Linking Circuit 2
When current i1 flows in circuit 1, the magnetic flux linking circuit 2 is proportional to i1
i.e. 2 12 1M i …(3.10)
where M12 is a constant of proportionality for the pair of circuits in their specified positions.
The constant M12 is known as the mutual inductance of the two circuits.
Similarly, if current i2 circulates in circuit 2, a magnetic flux 1 is produced in circuit 1, where
1 21 2M i …(3.11)

160
The mutual inductances M12 and M21 are equal. Units of M are Henrys.
If the current i1 changes the flux 2 will also change, and so the emf induced in 2 is given by
12 12
diM
dt …(3.12)
Similarly, if i2 changes an emf is induced in circuit 1
21 21
diM
dt …(3.13)
In circumstances where the circuits are in relative motion, the mutual inductance changes so
that an additional emf is induced. The total emf induced is then given by:
MdMi
dt ....(3.14)
The fact that a variation of the magnetic field in circuit 1 induces an emf in circuit 2 implies
that energy is exchanged between the two circuits, i.e. energy is exchanged via the
electromagnetic field.
14.4 Combination of Self-inductances
This section discusses self-inductances in series and in parallel.
Self-inductances in Series
We consider three inductors connected as shown in Figure 3.8.
Figure 3.8: Self-inductances in Series
If the interaction between the coils through mutual inductance is neglected, then the induced
emf across the three isolated inductances will be:
1 2 3 1 2 3–di di di di
L L L L L Ldt dt dt dt
di
Ldt
where L = L1 + L2 + L3.
Hence inductors in series have an equivalent inductance equal to the sum of the separate
inductances provided there is no mutual inductance between one and another.
Self-inductances in Parallel
We consider two inductors connected as shown in Figure 3.9. Neglecting interaction through
mutual inductance, the induced emf in each inductor is as follows:
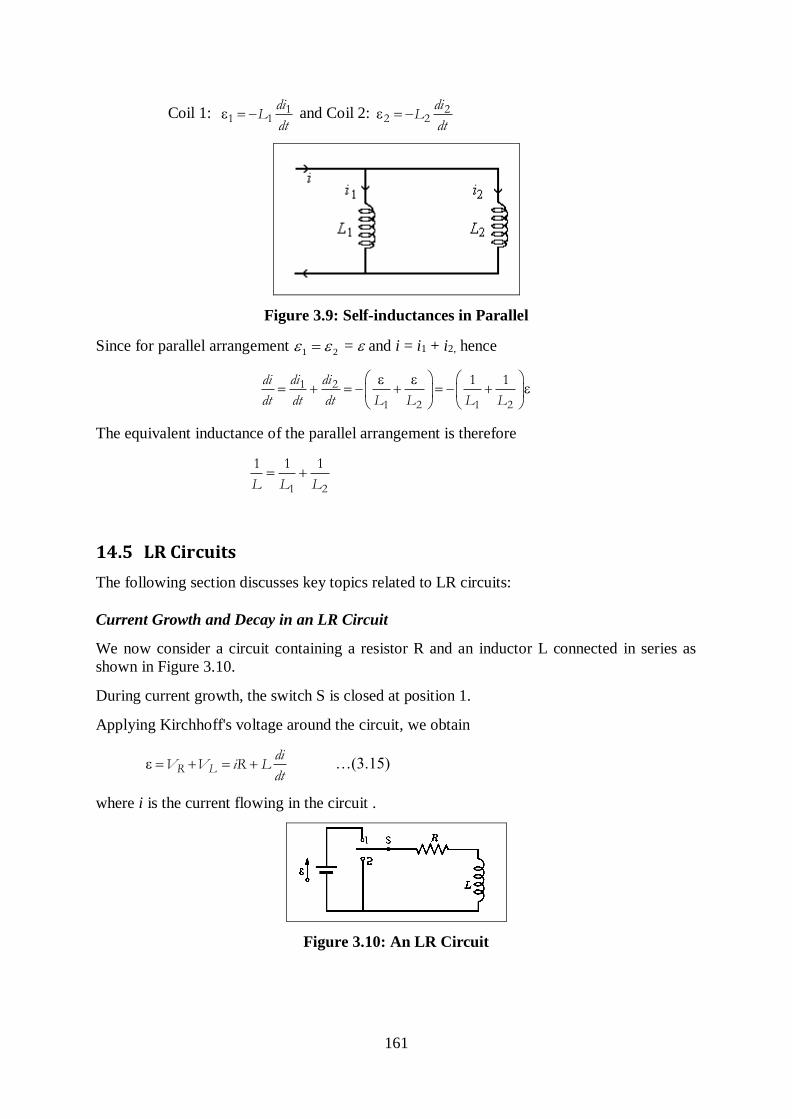
161
Coil 1: 11 1
diLdt
and Coil 2: 22 2
diL
dt
Figure 3.9: Self-inductances in Parallel
Since for parallel arrangement 1 2 = and i = i1 + i2, hence
1 2
1 2 1 2
1 1di didi
dt dt dt L L L L
The equivalent inductance of the parallel arrangement is therefore
1 2
1 1 1
L L L
14.5 LR Circuits
The following section discusses key topics related to LR circuits:
Current Growth and Decay in an LR Circuit
We now consider a circuit containing a resistor R and an inductor L connected in series as
shown in Figure 3.10.
During current growth, the switch S is closed at position 1.
Applying Kirchhoff's voltage around the circuit, we obtain
R Ldi
V V iR Ldt
…(3.15)
where i is the current flowing in the circuit .
Figure 3.10: An LR Circuit

162
The current growth equation can be shown to be given by
0 1
Rt
Li t i e ....(3.16)
We introduce a characteristic time constant R
LL called an inductive time constant so that
Equation (3.23) becomes
0 1L
t
i t i e …(3.17)
This is the current growth equation in an LR circuit.
As observed in the case of RC circuits, the time constant L sets the time scale of the LR
circuit. The current rises from zero at t = 0 to 0.63i0 at t = L and approaches asymptotically
the steady value i0. These features of the time dependence of the current in an LR circuit are
shown in Figure 3.11.
Figure 3.11: Growth of Current in an LR Circuit
Figure 3.12: Decay of Current in an LR Circuit

163
Current Decay in an LR Circuit
During current decay, the switch is closed at position 2 when the current in the circuit has
reached the steady current value i0, the equation that governs the subsequent decay of the
current is obtain by applying Kirchhoff’s voltage law to the circuit:
0di
L Ridt
di R
dti L
…(3.18)
With the initial condition i = i0 at t = 0, the solution of Equation (3.18) is
0
Rt
Li i e …(3.19)
Equation (3.19) is the current decay equation in an LR circuit.
The decay of the current is shown schematically in Figure 3.12.
It will be noted that the decay of the current occurs with the same time constant LL
Ras
was the growth of the current in Figure 3.11.
You will observe that unlike an RC circuit, an LR circuit sustains a current when connected
to a DC supply. However, the current builds up at a rate governed by the time constant L/R.
A large time-constant implies a slow build up.
14.6 Energy Storage in a Magnetic Field
We will discuss in detail the energy storage in magnetic field as under:
The Basic Relation
We consider the energy stored in a circuit containing self-inductance L and a resistor R such
as the circuit shown in Figure 3.10.
During the current growth, the rate at which energy is being transferred from the source of
emf to the rest of the circuit at any instant is the product i.
From Equation (3.15), we have
2 dii i R iL
dt …(3.20)
In Equation (3.20), the first term on the right-hand side is recognizable as the energy
dissipated in the resistor. Now since Equation (3.20) represents a statement of conservation of
energy, it follows therefore that the second term represents the rate of energy storage in the
magnetic field of the inductor.
Let UB represent the energy stored in the magnetic field of the inductor. Then the rate at
which energy is stored is derived from Equation (3.20)
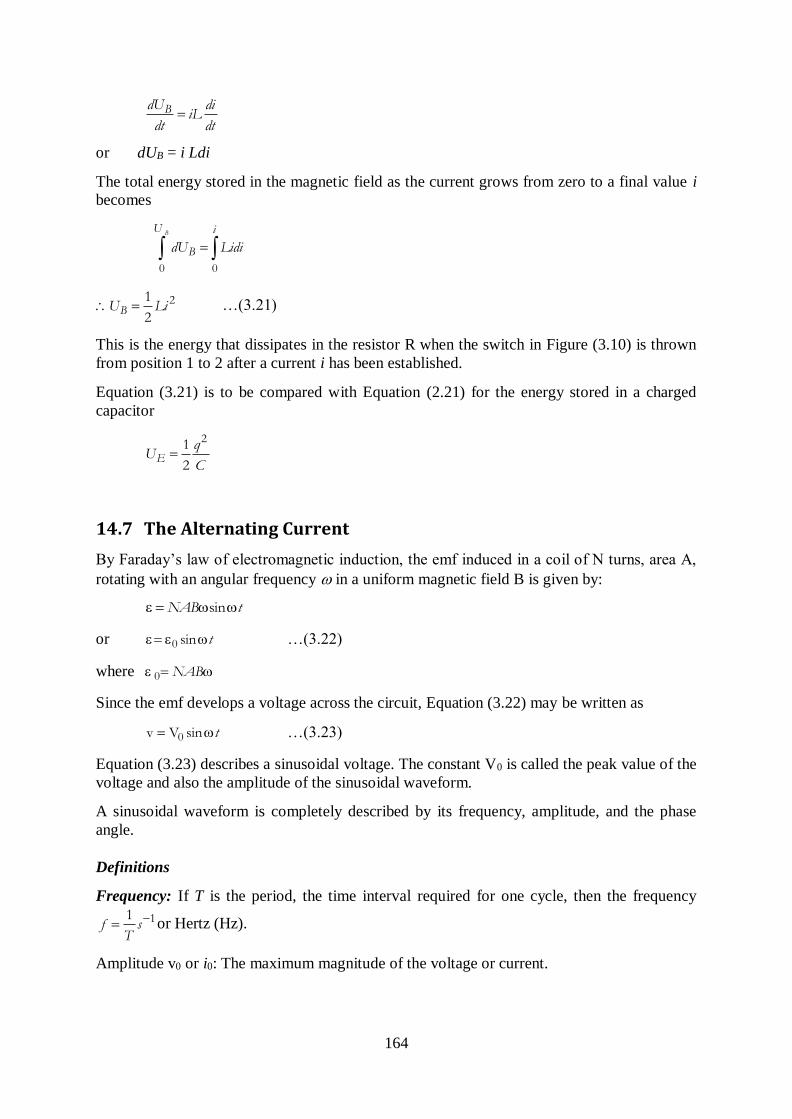
164
BdU di
iLdt dt
or dUB = i Ldi
The total energy stored in the magnetic field as the current grows from zero to a final value i
becomes
0 0
BU i
BdU Lidi
21
2BU Li …(3.21)
This is the energy that dissipates in the resistor R when the switch in Figure (3.10) is thrown
from position 1 to 2 after a current i has been established.
Equation (3.21) is to be compared with Equation (2.21) for the energy stored in a charged
capacitor
21
2E
qU
C
14.7 The Alternating Current
By Faraday’s law of electromagnetic induction, the emf induced in a coil of N turns, area A,
rotating with an angular frequency in a uniform magnetic field B is given by:
sinNAB t
or 0 sin t …(3.22)
where 0 NAB
Since the emf develops a voltage across the circuit, Equation (3.22) may be written as
0v V sin t …(3.23)
Equation (3.23) describes a sinusoidal voltage. The constant V0 is called the peak value of the
voltage and also the amplitude of the sinusoidal waveform.
A sinusoidal waveform is completely described by its frequency, amplitude, and the phase
angle.
Definitions
Frequency: If T is the period, the time interval required for one cycle, then the frequency
11f sT
or Hertz (Hz).
Amplitude v0 or i0: The maximum magnitude of the voltage or current.
165
Phase : The angle between the unit normal to the plane of the coil n
and the magnetic field
B at t = 0; (i.e. the phase angle sets the starting point of the rotating coil).
Phase Difference: Two sinusoidal waveforms of the same frequency are said to be out of
phase when they have different starting points. The phase difference cannot exceed 90 or /2
radians.
Average Value: A sinusoidal voltage with period T has an average value
ave
0
1v v( )
T
t dtT
…(3.24)
Root Mean Square (RMS) Value: A sinusoidal voltage with period T has an r.m.s
(or effective) value
2
rms
0
1v v( )
T
t dtT
…(3.25)
From Equation 3.23 we have
2 2rms 0
0 0
1 1 1v v( ) V 1 cos2
2
T T
t dt t dtT T
rms 0v V / 2 …(3.26)
Because the integral of the cosine function over a complete cycle is zero.
Similarly, the rms value of a sinusoidal current
rms 0I / 2i …(3.27)
It should be noted that AC meters measure rms values.
Power: The electrical power is the product of impressed voltage and the resulting current
P(t) = v(t) ×i(t).
This is instantaneous and therefore fluctuates with time. The average power is
rms rmsP v i
Energy: Power is the time rate of energy transfer
i.e. dW
Pdt
So the energy transferred during the time interval t1 to t2 is
2
1
t
t
W Pdt
166
1. The power rating of an element used in AC circuits refers to the
element's average power rating. What is the maximum instantaneous
power to a 60 W light bulb?
2. The average current in the power line to your house is zero. Despite
this fact, electric power is delivered to your house. Explain.
Example: A resistance R = 25 is connected to a sinusoidal source of voltage v = 150sint.
Determine:
(a) the current i
(b) the rms current
(c) the instantaneous power, and
(d) the average power.
Solution:
(a) i = 6sin t
(b) irms = 6/ 2 = 4.24 A.
(c) instantaneous power p = 6sin t × 150sin t = 900sin t watts.
(d) the average power pave = irms × vrms = 4.24 × 106.07 = 449.7 watts.
Summary
1. Electromagnetism is the branch of physics concerned with the forces that occur
between electrically charged particles.
2. Magnetic field is defined by the force it exerts on a moving charged particle. The
Magnetic Field at a point is defined as the vector field B which exerts a force F, F
= q vB, on a charged particle q moving with velocity v through that point.
3. magnetic field is represented pictorially by magnetic field lines.
4. The SI unit of magnetic field is the Tesla (T).
5. The electromotive force (emf) is the force that keeps charges in motion in a circuit.
6. Faraday Law of Electromagnetic Induction: In any time varying magnetic field, the
electromotive force induced in any closed circuit is equal to the negative of the time rate
of change of the magnetic flux over the surface bounded by the circuit.
167
7. Lenz's Law: The sense of the induced current is such that its contribution to the
magnetic field opposes the change in magnetic flux which produces the induced
current.
Exercise
Inductance
1. Two inductors L1 and L2 are connected in series and are separated by a large distance.
(a) Show that the equivalent inductance is given by .21 LLLeq
(b) Why must their separation be large for this relationship to hold?
(c) What is the generalization of (a) for N inductors in series?
2. Two inductors L1 and L2 are connected in parallel and separated by a large distance.
(a) Show that the equivalent inductance is given by:
1 2
1 1 1
eqL L L
(b) Why must their separation be large for this relation to be valid?
RL Circuits
3. The current in an RL circuit builds up to 1/3 of its steady state value in 5 .0 s.
Calculate the inductive time constant.
4. The current in an RL circuit drops from 1.0 A to 10 mA in 1 s following removal of
the battery from the circuit. If L = 10 H, find the resistance R in the circuit.
Energy Storage
5. The magnetic energy stored in a certain inductor is 25 mJ when the current is 60.0
mA.
(a) Calculate the inductance.
(b) What current is required for the magnetic energy to be four times as much?
6. A coil with inductance L= 2.0 H and a resistance R = 10 Ω is suddenly connected to a
resistance-less battery with ε = 100 V.
(a) What is the equilibrium current?
(b) How much energy is stored in the magnetic field when this current exists in the
circuit?

168
7. A coil is connected in series with a resistance R = 10.k. When a 50 V battery is
applied to the circuit the current reaches a value of 2.00 mA after 5 mS.
(a) Find the inductance of the coil.
(b) How much energy is stored in the coil when the current is 2 mA?
References
Halliday, D., Resnick, R. and Krane, K.S. Physics Volume II, Fourth Edition, 1992.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J, Physics Classical and Modern, 1989.
McGraw Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
E.F. Redish, Teaching Introductory Physics with the Physics Suite, 2003. John Wiley
& Sons.
Kiwanga, C.A. OPH 105: Electromagnetism II, OUT 1994.
169
SECTION FIVE:
OSCILLATIONS
Lecture 15: Oscillations and Waves
15.1 Introduction
In Section one, we studied the most common types of motion, namely One-dimensional and
Rotational motions. We have developed the concepts of work, energy and momentum for
these types of motion. In this lecture, we are going to study oscillations. Unlike the other
types of motion we have studied so far, oscillations generally do not have constant
acceleration, are many times chaotic, and require far more advanced mathematics to handle.
As such, we are going to concentrate on the most basic kinds of oscillations which are
naturally easier to examine.
Practically everyday one encounters many kinds of oscillatory motion. Common examples
include children playing on a swing, vibration of a guitar string, low and high tides at the sea-
shore, etc. Examples on a microscopic scale include the vibration of air molecules that
transmit sound waves and the oscillation of atoms in a quartz crystal of an electronic watch.
The examples mentioned so far are mechanical oscillations. Examples of electrical
oscillations range from simple oscillator circuits comprising a capacitor and an inductor to
complex circuits to be found in transmitters and receivers of electromagnetic waves.
One common feature of all these systems is the mathematical formulations used to describe
their oscillations. In all cases, the oscillating quantity can be described in terms of sine or
cosine functions.
In this lecture we shall study simple harmonic motion which is the most fundamental
vibration of a single particle or a one-dimensional system. Many problems involving
mechanical vibrations at small amplitudes reduce to that of the simple harmonic oscillator or
to a combination of such oscillators.
Lecture Objectives At the end of this lecture, you should be able to:
i. Define an oscillation system.
ii. Describe the variables of an oscillation.
iii. Derive the simple harmonic equation.
iv. Describe the characteristics of simple harmonic motion.
170
v. Compute the energy of a simple harmonic motion.
vi. Apply the physics of oscillation to the simple and compound pendulums.
15.2 Definition of an Oscillating System
An oscillating system is a system in which a particle or set of particles moves back and forth,
always returning to its initial position after a certain period of time. It can be a ball bouncing
on a floor, or a pendulum swinging back and forth, or a spring compressing and stretching.
This kind of motion is called periodic motion and it is encountered in all branches of physics.
We can also define an oscillating system a little more precisely, in terms of the forces acting
on a particle in the system. In every oscillating system there is an equilibrium point at which
no net force acts on the particle. A pendulum, for example, has its equilibrium position when
it is hanging vertical, and the gravitational force is counteracted by the tension. If displaced
from this point, however, the pendulum will experience a gravitational force that causes it to
return to the equilibrium position. No matter which way the pendulum is displaced from
equilibrium, it will experience a force returning it to the equilibrium point. If we denote our
equilibrium point as x = 0, we can generalize this principle for any oscillating system: In an
oscillating system, the force always acts in a direction opposite to the displacement of the
particle from the equilibrium point.
This force, called a restoring force, can be constant or it can vary with time or position.
15.3 Variables of an Oscillation
In an oscillating system, the traditional variables – displacement x, velocity v, time t, and
acceleration a – still apply to the motion, but we introduce two new variables that describe
the periodic nature of the motion, namely the amplitude A, the period T, and the frequency f
or .
Amplitude
A simple oscillator generally goes back and forth between two extreme points; the points of
maximum displacement from the equilibrium point. This point of maximum displacement
denoted by either xm or A is defined as the amplitude of the oscillation.
Period and Frequency
In simple oscillations, a particle completes a round trip in a certain period of time. This time,
T, which denotes the time it takes for an oscillating particle to return to its initial position, is
called the period of oscillation.
We also define another variable related to time called the frequency. Frequency, denoted by ν
or f, is defined as the number of cycles per unit time and is related to period by the equation
ν = 1/T
The period is measured in seconds, while frequency is measured in Hertz (or Hz), where 1 Hz
= 1cycle/second. The variable angular frequency denoted by ω defines the number of radians
171
per second in an oscillating system. This concept of angular frequency may seem to be
confusing because most oscillations don't engage in circular motion and thereby sweep out
radians like in rotational motion. However, oscillating systems do complete cycles, and if we
think of each cycle as containing 2π radians, then we can define angular frequency.
The three variables dealing with the cycle of an oscillation are related by the equation
22
T
Equipped with these variables, we now look at the special case of the simple harmonic
oscillator.
15.4 The Basic Simple Harmonic Equation
Simple Harmonic Motion (SHM) results when a particle which is displaced at a small
distance x from its equilibrium position experiences a restoring force which is proportional to
x.
The restoring force
F = – kx …(4.1)
where k is a constant of proportionality and is generally called the force constant or stiffness
and has the dimensions of force per unit length. The negative sign shows that F acts against
the direction of increasing displacement.
By Newton’s second law, we have the equation of motion of the simple harmonic oscillator
2
2
d xm kxdt
2
20
d x kx
mdt …(4.2)
The dimensions of k/m are
2
2MLT
TM L
And so we let 2 /k m , where is the angular frequency with which the particle oscillates.
Take Note
The frequency of an oscillation is determined by the elastic and inertial properties of the
system.

172
In terms of , Equation (4.2) becomes
2
22
0d x
xdt
…(4.3)
Equation (4.3) is called the equation of motion of a simple harmonic oscillator.
Let us interpret this equation. The second derivative of a function of x plus the function itself
(times a constant) is equal to zero. Thus the second derivative of our function must have the
same form as the function itself. What readily comes to mind is the sine and cosine function.
Let us come up with a trial solution to our differential equation, and see if it works.
As a tentative solution, we write:
x = Acos (ωt) …(4.4)
where A is a constant. Differentiating this equation, we see that
sindx
A tdt
and differentiating again we have
2
22
cosd x
A tdt
Plugging this into Eq.4.3, we have
2 2cos cos 0A t A t
Equation 4.3 is indeed satisfied. Thus the equation governing simple harmonic oscillation is:
x = Acos (ωt) …(4.5)
Equation 4.5 is rather too simple in the sense that it lacks a phase constant which sets how the
simple harmonic motion is initiated. Hence, we add the phase constant to make the equation
complete.
x = Acos (ωt+) …(4.6)
where the constant A is the amplitude.
Activity
1. Give some examples of motions that are approximately simple
harmonic. Why are motions that are exactly simple harmonic rare?
2. What would happen to the motion of an oscillating system if the sign
of the force term -kx were changed?
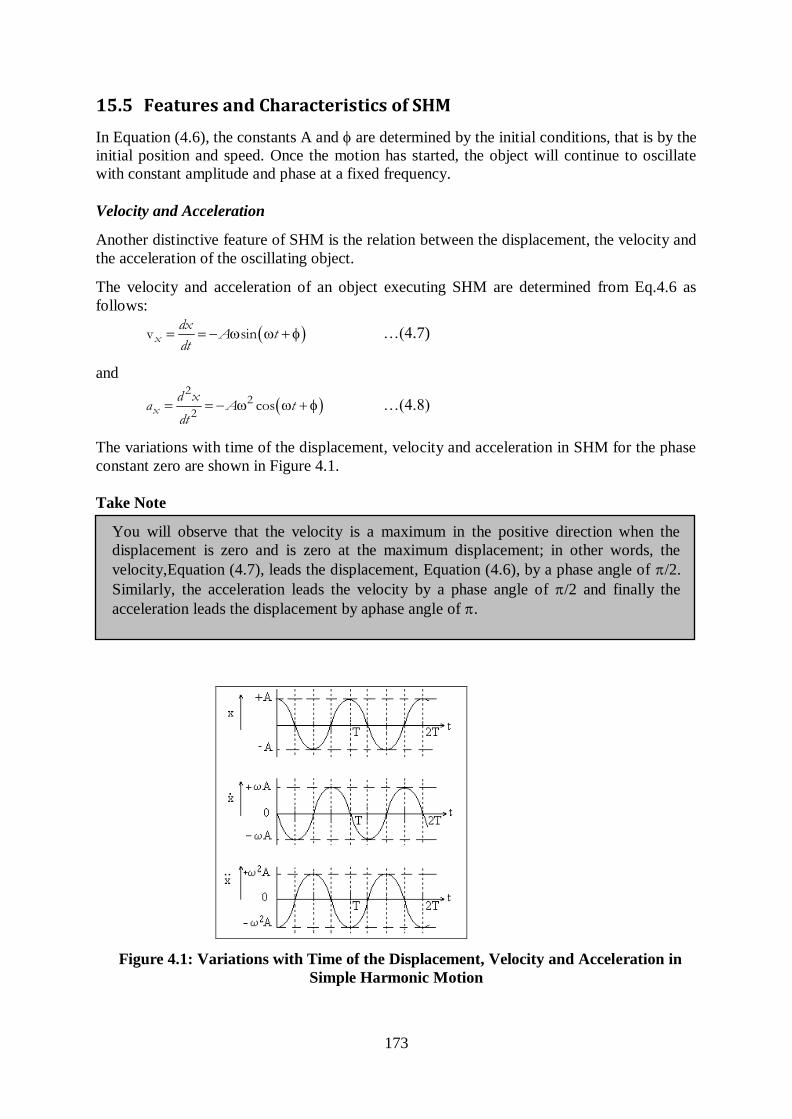
173
15.5 Features and Characteristics of SHM
In Equation (4.6), the constants A and are determined by the initial conditions, that is by the
initial position and speed. Once the motion has started, the object will continue to oscillate
with constant amplitude and phase at a fixed frequency.
Velocity and Acceleration
Another distinctive feature of SHM is the relation between the displacement, the velocity and
the acceleration of the oscillating object.
The velocity and acceleration of an object executing SHM are determined from Eq.4.6 as
follows:
v sinxdx
A tdt
…(4.7)
and
2
22
cosxd x
a A tdt
…(4.8)
The variations with time of the displacement, velocity and acceleration in SHM for the phase
constant zero are shown in Figure 4.1.
Take Note
You will observe that the velocity is a maximum in the positive direction when the
displacement is zero and is zero at the maximum displacement; in other words, the
velocity,Equation (4.7), leads the displacement, Equation (4.6), by a phase angle of /2.
Similarly, the acceleration leads the velocity by a phase angle of /2 and finally the
acceleration leads the displacement by aphase angle of .
Figure 4.1: Variations with Time of the Displacement, Velocity and Acceleration in
Simple Harmonic Motion
174
Activity 2
What changes could you make in a harmonic oscillator that would double
the maximum speed of the oscillating object?
15.6 Energy of a Simple Harmonic Oscillator
The simple harmonic oscillator is a conservative system. The kinetic energy of the system at
any given time is given by:
221 1
sin2 2
K mv m t
2 21sin
2K kA t
Since the velocity of the oscillator does change, going from zero to a maximum value, there
must be an expression for the potential energy of the system, such that the total energy of the
system is constant.
The kinetic energy has a maximum value when the potential energy is zero and sin(ωt+) =
1, so that
2max
1
2K kA
Since the potential energy is zero at this point, this value must give the total energy of the
system. Thus, at any time, we can state that:
E = U + K
2 2 21 1sin
2 2kA U A k t
Solving for U we have
2 211 sin
2U kA t
Recall that sin2a + cos2a = 1, so that we have
2 21cos
2U kA t
21
2U kx
The potential energy U is largest when the displacement is at its maximum value x = A and
zero at the equilibrium position, while the kinetic energy is maximum at the equilibrium
position and zero when the displacement is at its maximum value.
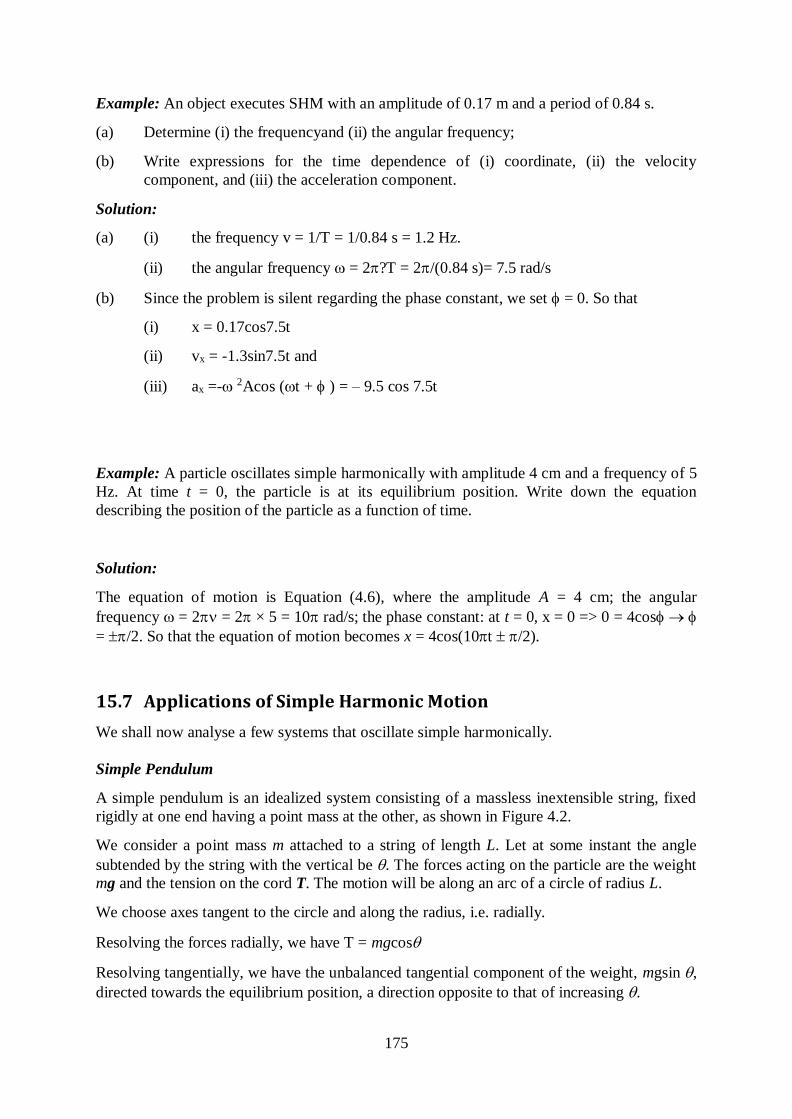
175
Example: An object executes SHM with an amplitude of 0.17 m and a period of 0.84 s.
(a) Determine (i) the frequencyand (ii) the angular frequency;
(b) Write expressions for the time dependence of (i) coordinate, (ii) the velocity
component, and (iii) the acceleration component.
Solution:
(a) (i) the frequency v = 1/T = 1/0.84 s = 1.2 Hz.
(ii) the angular frequency = 2?T = 2/(0.84 s)= 7.5 rad/s
(b) Since the problem is silent regarding the phase constant, we set = 0. So that
(i) x = 0.17cos7.5t
(ii) vx = -1.3sin7.5t and
(iii) ax =- 2Acos (t + ) = – 9.5 cos 7.5t
Example: A particle oscillates simple harmonically with amplitude 4 cm and a frequency of 5
Hz. At time t = 0, the particle is at its equilibrium position. Write down the equation
describing the position of the particle as a function of time.
Solution:
The equation of motion is Equation (4.6), where the amplitude A = 4 cm; the angular
frequency = 2 = 2 × 5 = 10 rad/s; the phase constant: at t = 0, x = 0 => 0 = 4cos
=/2. So that the equation of motion becomes x = 4cos(10t /2).
15.7 Applications of Simple Harmonic Motion
We shall now analyse a few systems that oscillate simple harmonically.
Simple Pendulum
A simple pendulum is an idealized system consisting of a massless inextensible string, fixed
rigidly at one end having a point mass at the other, as shown in Figure 4.2.
We consider a point mass m attached to a string of length L. Let at some instant the angle
subtended by the string with the vertical be . The forces acting on the particle are the weight
mg and the tension on the cord T. The motion will be along an arc of a circle of radius L.
We choose axes tangent to the circle and along the radius, i.e. radially.
Resolving the forces radially, we have T = mgcos
Resolving tangentially, we have the unbalanced tangential component of the weight, mgsin ,
directed towards the equilibrium position, a direction opposite to that of increasing .
176
Figure 4.2: A Simple Pendulum
Therefore, the tangential component constitutes the restoring force F.
sinF mg
Take Note
You will notice that the restoring force is not proportional to , the angular
displacement, and hence the oscillation is not necessarily simple harmonic.
The displacement along the arc is L and for small angles this is nearly straight-line motion.
Hence, assuming
sin and x = L
We obtain
F mg mg mgx
L
mg
Lx
sin
The force is now proportional to the displacement and is oppositely directed. Such a force
fulfils the criterion for simple harmonic motion.
By Newton’s second law we obtain the equation of motion of the simple harmonic oscillator
0xx
ma mgL
0xg
a xL
…(4.9)
For which the angular frequency of the system /g L ;
the frequency
1
2
gv
L
and so the period 2L
Tg
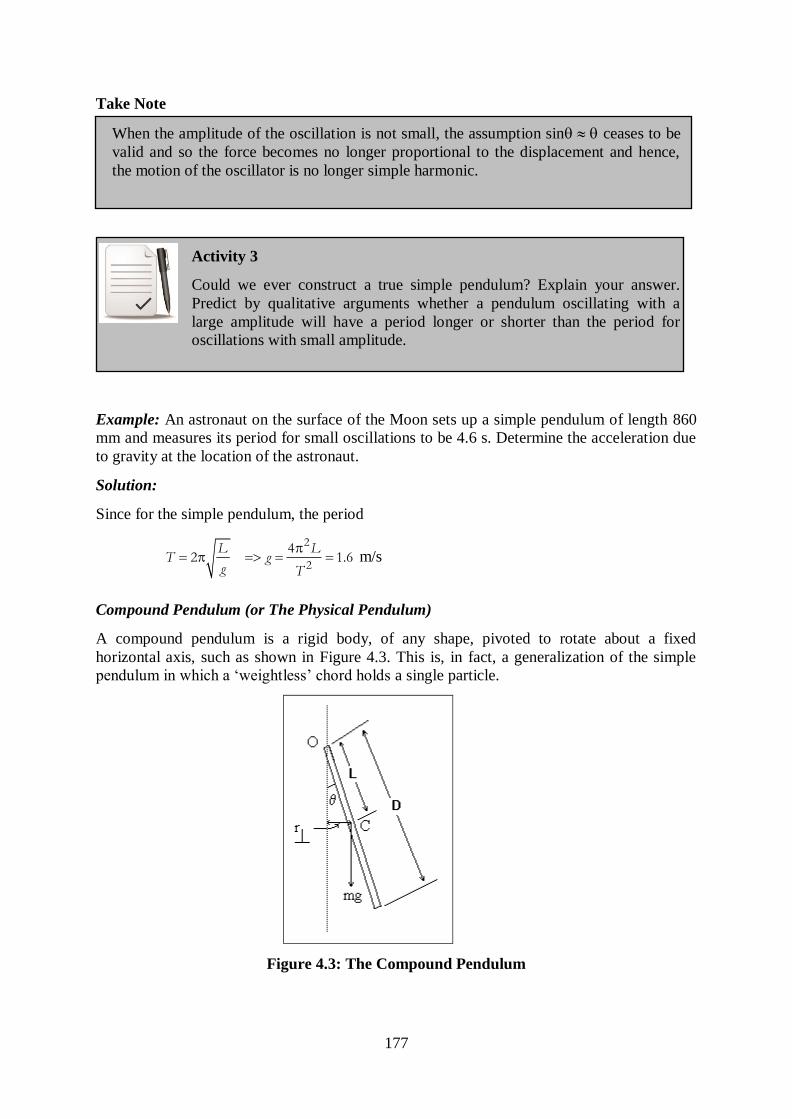
177
Take Note
When the amplitude of the oscillation is not small, the assumption sin ceases to be
valid and so the force becomes no longer proportional to the displacement and hence,
the motion of the oscillator is no longer simple harmonic.
Activity 3
Could we ever construct a true simple pendulum? Explain your answer.
Predict by qualitative arguments whether a pendulum oscillating with a
large amplitude will have a period longer or shorter than the period for
oscillations with small amplitude.
Example: An astronaut on the surface of the Moon sets up a simple pendulum of length 860
mm and measures its period for small oscillations to be 4.6 s. Determine the acceleration due
to gravity at the location of the astronaut.
Solution:
Since for the simple pendulum, the period
2
2
42 1.6
L LT g
g T m/s
Compound Pendulum (or The Physical Pendulum)
A compound pendulum is a rigid body, of any shape, pivoted to rotate about a fixed
horizontal axis, such as shown in Figure 4.3. This is, in fact, a generalization of the simple
pendulum in which a ‘weightless’ chord holds a single particle.
Figure 4.3: The Compound Pendulum
178
The period of a compound pendulum is given by:
2I
TmgL
…(4.10)
Exercise
Simple Harmonic Oscillations
1. A mass m = 0.5 kg is hung on a vertical massless spring. The new equilibrium
position of the spring is found to be 3 cm below the equilibrium position of the spring
without the mass. What is the spring constant, k?
2. Consider a simple harmonic oscillation with m = 0.5 kg, k = 10 N/m and amplitude A
= 3 cm. ( a) What is the total energy of the oscillator? (b) What is its maximum speed?
(c) What is the speed when x = 2 cm? (d) What are the kinetic and potential energies
when x = 2 cm?
3. If the oscillator in the above problem is released from rest at x = A when the clock is
set to t = 0 seconds, (a) determine the position and velocity of the oscillator at t = 2 s.
(b) At what time does the oscillator get to x = – 1 cm?
4. A simple pendulum is used in a physics laboratory experiment to obtain an
experimental value for the gravitational acceleration, g. A student measures the length
of the pendulum to be 0.510 meters, displaces it 10 o from the equilibrium position,
and releases it. Using a stopwatch, the student determines that the period of the
pendulum is 1.44 s. Determine the experimental value of the gravitational
acceleration.
5. Find the mechanical energy of a block-spring system having a spring constant of 1.3
N/cm and an amplitude of 2.4 cm.
6. An oscillating block-spring system has a mechanical energy of 1.00J, an amplitude of
10.0 cm, and a maximum speed of 1.20 m/s. Find (a) the spring constant, (b) the mass,
and (c) the frequency of oscillation.
7. What is the length of a simple pendulum whose period is 1.00 s at a point where g =
9.8 m/s2?
8. If a simple pendulum with length 1.50 m makes 72.0 oscillations in 180 s, what is the
acceleration of gravity at its location?
9. The amplitude of a lightly damped oscillator decreases by 3.0% during each cycle.
What fraction of the energy of the oscillator is lost in each full oscillation?

179
Summary
i. An oscillating system is a system in which a particle or set of particles moves back
and forth, always returning to its initial position after a certain period of time.
ii. The frequency of an oscillation is determined by the elastic and inertial properties of
the system
iii. Simple Harmonic Motion (SHM) results when a particle which is displaced at a small
distance x from its equilibrium position experiences a restoring force which is
proportional to x.
iv. Once the motion has started, the object will continue to oscillate with constant
amplitude and phase at a fixed frequency.
v. Applications of SHM include simple pendulum.
References
Halliday, D., Resnick, R. and Krane, K.S. Physics Volume II, Fourth Edition, 1992.
John Wiley and Sons.
Gottys,W., Keller, F.J. and Skove, M.J, Physics Classical and Modern, 1989.
McGraw Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
E.F. Redish, Teaching Introductory Physics with the Physics Suite, 2003. John Wiley
& Sons.
Kiwanga, C.A. OPH 104: Vibrations and Waves, OUT 2000.

180
Lecture 16: Damped Simple Harmonic Oscillations
16.1 Introduction
In the previous sections, we considered the case of ideal free simple harmonic oscillations
which, once started would continue indefinitely, with a constant amplitude and a constant
frequency. The total energy of an ideal free simple harmonic oscillator remains constant. Free
simple harmonic oscillations of this kind are never realized in practice. A free oscillation of a
real physical system gradually decreases with time and eventually the system comes to rest.
The total energy of a real physical system decreases with time due to losses arising from:
i. frictional forces in the medium through which the oscillator moves, and
radiation; the oscillator imparts periodic motion to the particles of the medium in which
it oscillates, thus producing waves. It is this effect that is responsible for the
propagation of sound and electromagnetic waves.
The effect of radiation and frictional forces on a free oscillator is that the amplitude of
oscillations gradually decreases with time. The reduction in amplitude, and hence energy, of
the oscillator is called damping and the oscillations are said to be damped. In this lecture, we
will study the effect of damping on harmonic oscillations.
Lecture Objectives
At the end of this lecture, you should be able to do the following:
i. Describe damping forces.
ii. Explain the effect of damping on a simple harmonic oscillator.
iii. Describe forced oscillations and resonance.
16.2 Damping Forces
The damping of a real system is a complex phenomenon involving several kinds of damping
forces such as viscous damping, Coulomb friction (ordinary friction) and structural damping
(internal friction). Because it is very difficult to predict the magnitude of the various damping
forces, the damping of a system is usually approximated by an equivalent viscous damping.
For small velocities, the viscous damping force is proportional to the velocity of the
oscillator,
F = –pv …(4.11)
where p is called the viscous damping coefficient. This linear viscous damping force model
shall be adopted throughout.

181
16.3 Effect of Damping
Consider the effect of damping on a simple harmonic oscillator shown in Figure 4.4.
Figure 4.4: Damped Simple Harmonic Oscillator
When the system is displaced from its equilibrium position, the forces acting on the system
are as follows:
i. a restoring force – kx, where k is the spring constant and x the displacement, and
a damping force, dxpdt
, where p is the coefficient of the damping force and dx
dtis the velocity
of the moving part of the system.
These forces must balance with the Newton’s force, so that the equation of motion becomes
2
2
d x dxm kx p
dtdt
The displacement of a particle acted upon by a damped restoring force is given by:
exp( /2 )cos dx t A pt m t …(4.12)
where ωd, the angular frequency of the damped oscillator, is given by
2
24d
k b
m m …(4.13)
If p = 0, then Equation (4.12) reduces to simple harmonic motion and Equation (4.13) reduces
angular frequency of a simple harmonic oscillator.
We can regard Equation (4.12) as a cosine function whose amplitude gradually decreases
with time.
For a simple harmonic oscillator, the mechanical energy is constant and given by
21
2E kA …(4.14) In a
damped oscillator the mechanical energy is not constant but decreases with time. If the
damping is small, the mechanical energy of the oscillator is given by
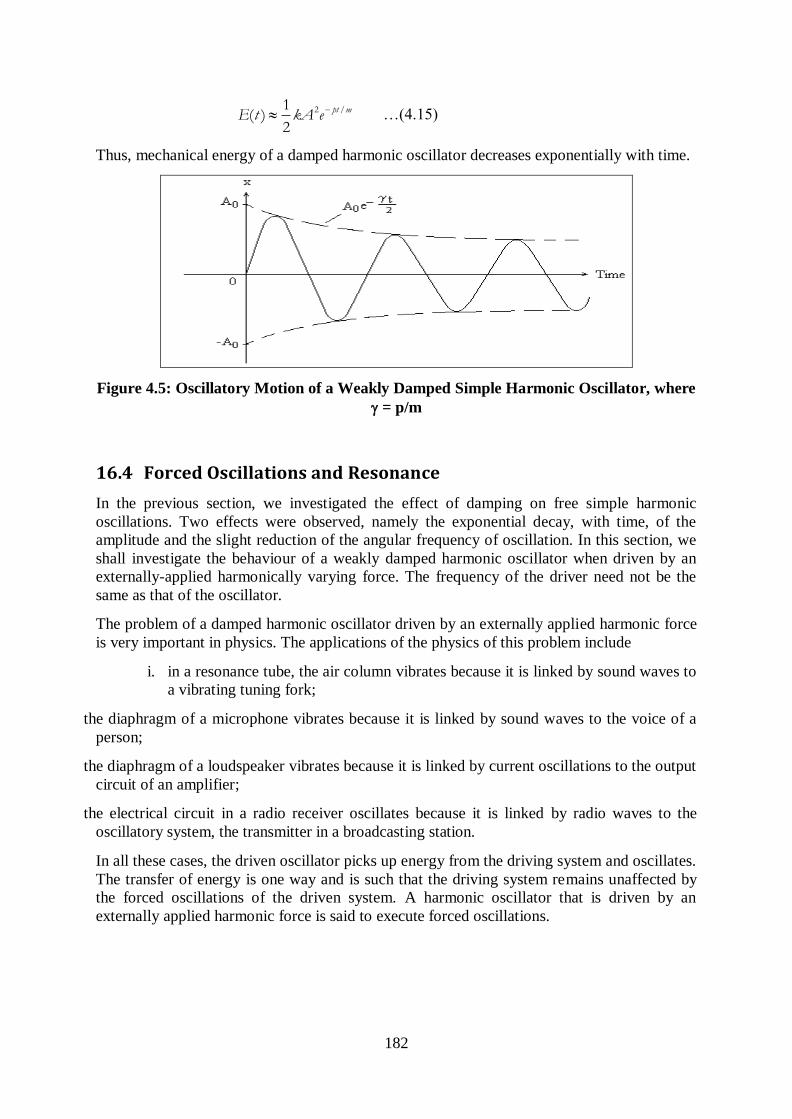
182
2 /1( )
2
pt mE t kA e …(4.15)
Thus, mechanical energy of a damped harmonic oscillator decreases exponentially with time.
Figure 4.5: Oscillatory Motion of a Weakly Damped Simple Harmonic Oscillator, where
= p/m
16.4 Forced Oscillations and Resonance
In the previous section, we investigated the effect of damping on free simple harmonic
oscillations. Two effects were observed, namely the exponential decay, with time, of the
amplitude and the slight reduction of the angular frequency of oscillation. In this section, we
shall investigate the behaviour of a weakly damped harmonic oscillator when driven by an
externally-applied harmonically varying force. The frequency of the driver need not be the
same as that of the oscillator.
The problem of a damped harmonic oscillator driven by an externally applied harmonic force
is very important in physics. The applications of the physics of this problem include
i. in a resonance tube, the air column vibrates because it is linked by sound waves to
a vibrating tuning fork;
the diaphragm of a microphone vibrates because it is linked by sound waves to the voice of a
person;
the diaphragm of a loudspeaker vibrates because it is linked by current oscillations to the output
circuit of an amplifier;
the electrical circuit in a radio receiver oscillates because it is linked by radio waves to the
oscillatory system, the transmitter in a broadcasting station.
In all these cases, the driven oscillator picks up energy from the driving system and oscillates.
The transfer of energy is one way and is such that the driving system remains unaffected by
the forced oscillations of the driven system. A harmonic oscillator that is driven by an
externally applied harmonic force is said to execute forced oscillations.
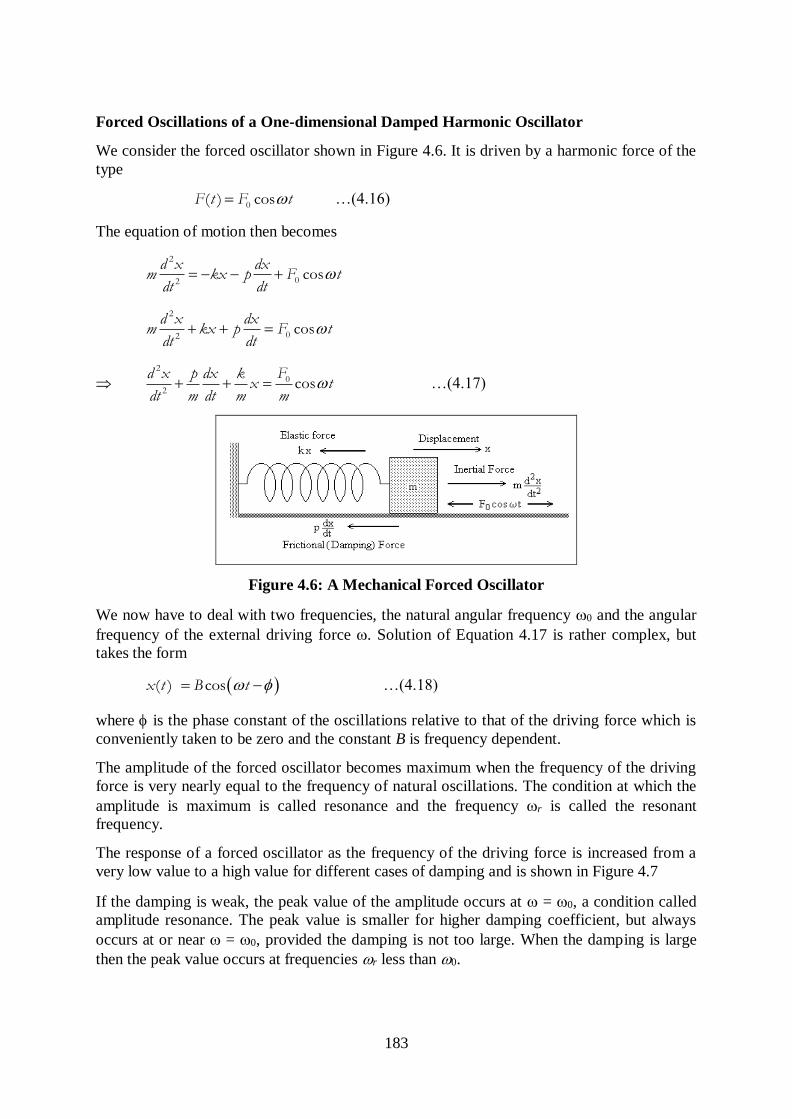
183
Forced Oscillations of a One-dimensional Damped Harmonic Oscillator
We consider the forced oscillator shown in Figure 4.6. It is driven by a harmonic force of the
type
0( ) cosF t F t …(4.16)
The equation of motion then becomes
2
02cos
d x dxm kx p F tdt dt
2
02cos
d x dxm kx p F tdt dt
2
0
2cos
Fd x p dx kx t
dt m dt m m …(4.17)
Figure 4.6: A Mechanical Forced Oscillator
We now have to deal with two frequencies, the natural angular frequency 0 and the angular
frequency of the external driving force . Solution of Equation 4.17 is rather complex, but
takes the form
( ) cosx t B t …(4.18)
where is the phase constant of the oscillations relative to that of the driving force which is
conveniently taken to be zero and the constant B is frequency dependent.
The amplitude of the forced oscillator becomes maximum when the frequency of the driving
force is very nearly equal to the frequency of natural oscillations. The condition at which the
amplitude is maximum is called resonance and the frequency r is called the resonant
frequency.
The response of a forced oscillator as the frequency of the driving force is increased from a
very low value to a high value for different cases of damping and is shown in Figure 4.7
If the damping is weak, the peak value of the amplitude occurs at = 0, a condition called
amplitude resonance. The peak value is smaller for higher damping coefficient, but always
occurs at or near = 0, provided the damping is not too large. When the damping is large
then the peak value occurs at frequencies r less than 0.
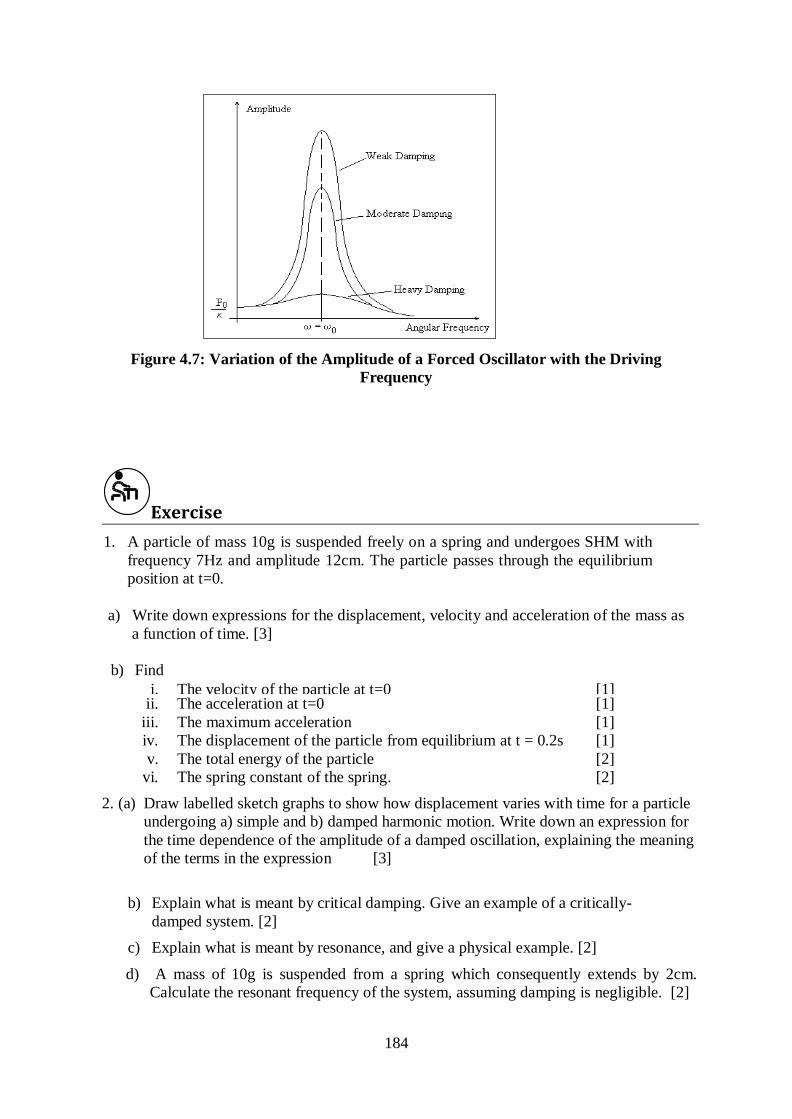
184
Figure 4.7: Variation of the Amplitude of a Forced Oscillator with the Driving
Frequency
Exercise 1. A particle of mass 10g is suspended freely on a spring and undergoes SHM with
frequency 7Hz and amplitude 12cm. The particle passes through the equilibrium
position at t=0.
a) Write down expressions for the displacement, velocity and acceleration of the mass as
a function of time. [3]
b) Find
i. The velocity of the particle at t=0 [1] ii. The acceleration at t=0 [1]
iii. The maximum acceleration [1]
iv. The displacement of the particle from equilibrium at t = 0.2s [1]
v. The total energy of the particle [2]
vi. The spring constant of the spring.
[2]
2. (a) Draw labelled sketch graphs to show how displacement varies with time for a particle
undergoing a) simple and b) damped harmonic motion. Write down an expression for
the time dependence of the amplitude of a damped oscillation, explaining the meaning
of the terms in the expression [3]
b) Explain what is meant by critical damping. Give an example of a critically-
damped system. [2]
c) Explain what is meant by resonance, and give a physical example. [2]
d) A mass of 10g is suspended from a spring which consequently extends by 2cm.
Calculate the resonant frequency of the system, assuming damping is negligible. [2]

185
e) Draw a sketch graph to show how the amplitude of oscillation of the system in d)
varies with the frequency of the driving force. How would the graph change if the
mass were suspended in water rather than air? [2]
3. A particle moving with simple harmonic motion of amplitude 10cm has a time period
of 25ms. What is its angular frequency? Calculate a) its phase, b) its velocity and c) its
phase when the displacement is 3cm from the equilibrium position.
186
4. A 1.5kg block is attached to a horizontal spring with spring constant 3000Nm-1
. Initially,
the block is at rest on a frictionless surface. A 10g bullet is fired into the block into the end
opposite the spring, and it sticks. If the subsequent oscillations of the spring have an
amplitude of 15cm, what was the initial velocity of the bullet? How would the amplitude
and frequency of the oscillations change if :
a) The same bullet were fired at a higher velocity into the block b) A heavier bullet were fired into the block at the original velocity.
5. (a) The end of a stretched string is forced to vibrate with a transverse displacement y (in
metres) = 0.3sin9t, where t is in seconds. If the tension in the string is 4N, and the mass per unit length of the string is 1.25gm
-1, calculate:
(i) The wave velocity (ii) The frequency (iii) The wavelength (iv) The displacement of the wave at (a)2m from the source, (b) 3m from the
source at a time 100ms after the oscillations commence.
(b) An astronaut on the Moon wishes to measure the local value of g by timing pulses
travelling down a 1.6m long wire of mass 4g, with a 3kg mass suspended from it. If a
pulse takes 36.1ms to traverse the total length of the string, calculate g.
6. What is Simple Harmonic Motion?
7. Describe Simple Harmonic Motion of a pendulum.
8. Describe Simple Harmonic Motion of an object attached to a horizontal spring.
9. Describe Simple Harmonic Motion of an object attached to a vertical spring.
10. Describe Simple Harmonic Motion of an object attached to a spring system in parallel.
11. Describe Simple Harmonic Motion of an object attached to a spring system in series.
12. Describe How potential energy and kinetic energy change in simple harmonic motion.
13. Describe Damping - light, hard and critical scenarios
187
Summary Damping forces are forces that restrain the vibratory motion, such as mechanical oscillations,
noise, and alternating electric currents, by dissipation of energy. Different kinds of damping
forces include viscous damping, Coulomb friction (ordinary friction) and structural damping
(internal friction). In a damped oscillator the mechanical energy is not constant but decreases
with time.
Two effects of damping on free simple harmonic oscillations are the exponential decay, with
time, of the amplitude and the slight reduction of the angular frequency of oscillation.
References
Gottys,W., Keller, F.J. and Skove, M.J, Physics Classical and Modern, 1989. McGraw
Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
E.F. Redish, Teaching Introductory Physics with the Physics Suite, 2003. John Wiley &
Sons.
Kiwanga, C.A. OPH 104: Vibrations and Waves, OUT 2000.
188
Lecture 17: Wave Motion
17.1 Introduction
Wave motion appears in almost every branch of physics and is an important phenomenon in life.
For example, sound and light waves are essential for our contact and perception of our
environment, surface waves are a common feature on
water-bodies, electromagnetic waves are playing an increasingly important role in local and
global communication, and the structure of atoms and nuclei can be understood via the wavelike
properties of their constituent particles. Mobile phone signals, microwave ovens, ultrasound
machines all use energy carried by waves. Earthquakes and tsunamis are destructive waves of
energy.
Lecture Objectives At the end of this lecture, you should be able to do the following:
(i) Define waves
(ii) Differentiate waves from oscillations.
(iii) Describe mechanical waves.
(iv) Explain the characteristics of waves.
(v) Define wavelength as a variable characteristic of wave motion.
(vi) Write the wave equation.
(vii) Describe interference of waves
(viii) Describe standing waves
Definition of waves
A wave is a pulse of energy. Waves carry energy away from a central transmitter. Mechanical
waves such as sound waves need some medium of transmission. Electromagnetic waves, for
example, radio waves can carry energy through a vacuum. If a mechanical wave is travelling
through a medium, the particles of the medium do not move along. They simply vibrate about
their equilibrium position, and the energy is transmitted through the interaction of neighbouring
particles.
Waves can be classified into two broad classes: mechanical waves and electromagnetic waves.
Mechanical waves travel in deformable or elastic media whereas electromagnetic waves do not
require a medium for their propagation. Despite the differences in the nature of the waves, the
physical and mathematical descriptions are similar.
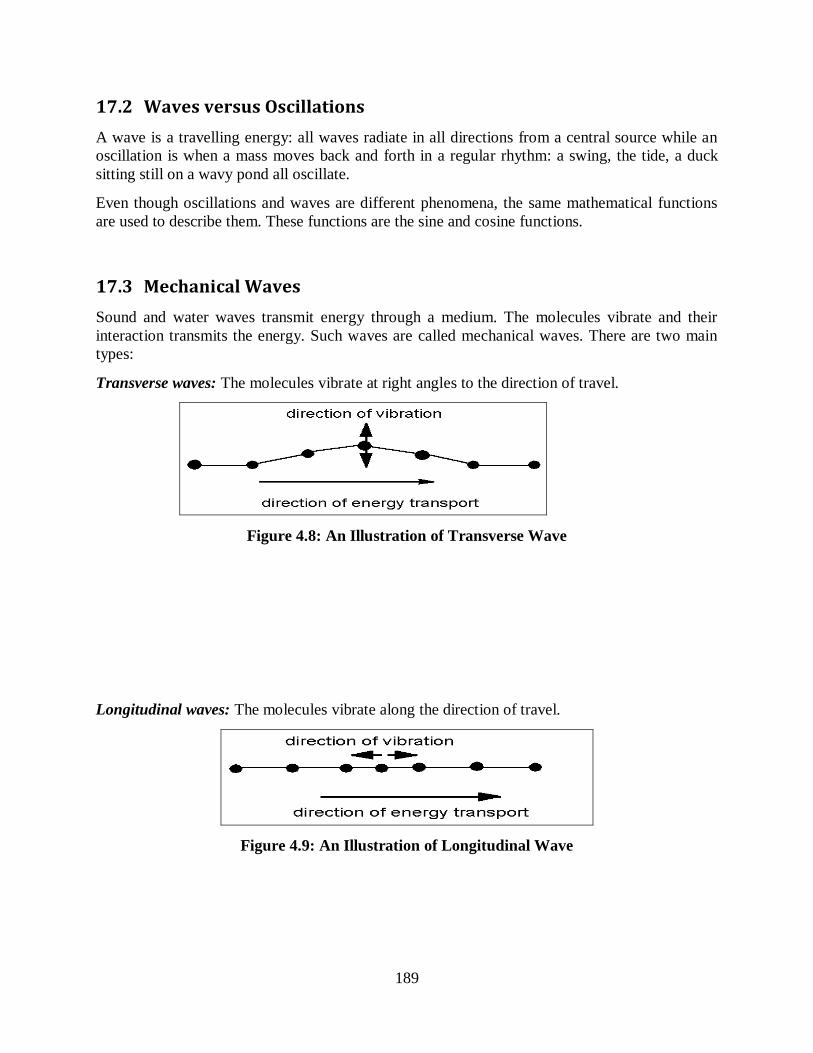
189
17.2 Waves versus Oscillations
A wave is a travelling energy: all waves radiate in all directions from a central source while an
oscillation is when a mass moves back and forth in a regular rhythm: a swing, the tide, a duck
sitting still on a wavy pond all oscillate.
Even though oscillations and waves are different phenomena, the same mathematical functions
are used to describe them. These functions are the sine and cosine functions.
17.3 Mechanical Waves
Sound and water waves transmit energy through a medium. The molecules vibrate and their
interaction transmits the energy. Such waves are called mechanical waves. There are two main
types:
Transverse waves: The molecules vibrate at right angles to the direction of travel.
Figure 4.8: An Illustration of Transverse Wave
Longitudinal waves: The molecules vibrate along the direction of travel.
Figure 4.9: An Illustration of Longitudinal Wave
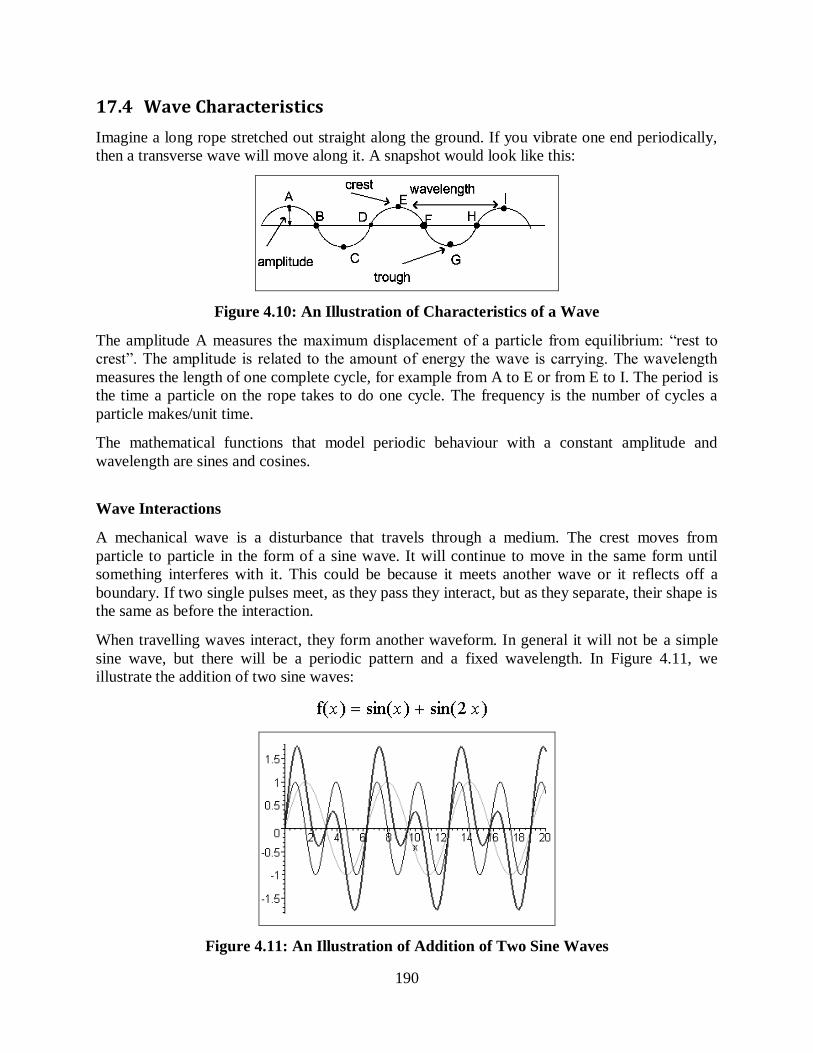
190
17.4 Wave Characteristics
Imagine a long rope stretched out straight along the ground. If you vibrate one end periodically,
then a transverse wave will move along it. A snapshot would look like this:
Figure 4.10: An Illustration of Characteristics of a Wave
The amplitude A measures the maximum displacement of a particle from equilibrium: “rest to
crest”. The amplitude is related to the amount of energy the wave is carrying. The wavelength
measures the length of one complete cycle, for example from A to E or from E to I. The period is
the time a particle on the rope takes to do one cycle. The frequency is the number of cycles a
particle makes/unit time.
The mathematical functions that model periodic behaviour with a constant amplitude and
wavelength are sines and cosines.
Wave Interactions
A mechanical wave is a disturbance that travels through a medium. The crest moves from
particle to particle in the form of a sine wave. It will continue to move in the same form until
something interferes with it. This could be because it meets another wave or it reflects off a
boundary. If two single pulses meet, as they pass they interact, but as they separate, their shape is
the same as before the interaction.
When travelling waves interact, they form another waveform. In general it will not be a simple
sine wave, but there will be a periodic pattern and a fixed wavelength. In Figure 4.11, we
illustrate the addition of two sine waves:
Figure 4.11: An Illustration of Addition of Two Sine Waves
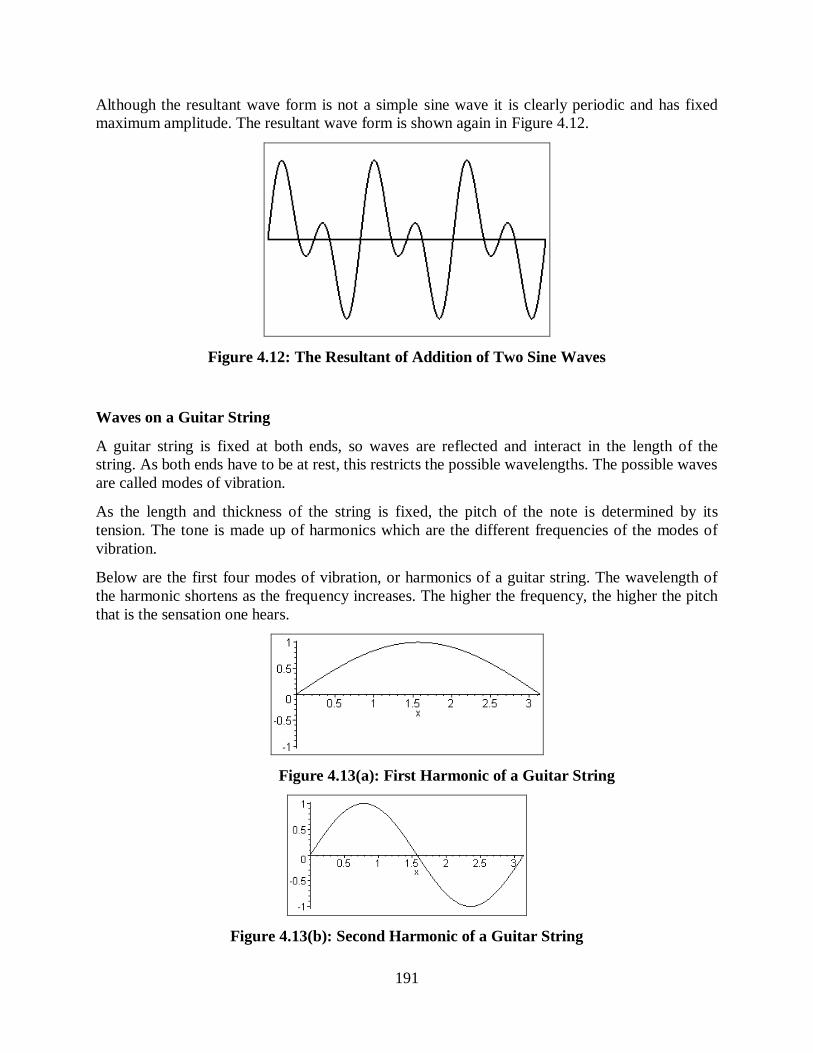
191
Although the resultant wave form is not a simple sine wave it is clearly periodic and has fixed
maximum amplitude. The resultant wave form is shown again in Figure 4.12.
Figure 4.12: The Resultant of Addition of Two Sine Waves
Waves on a Guitar String
A guitar string is fixed at both ends, so waves are reflected and interact in the length of the
string. As both ends have to be at rest, this restricts the possible wavelengths. The possible waves
are called modes of vibration.
As the length and thickness of the string is fixed, the pitch of the note is determined by its
tension. The tone is made up of harmonics which are the different frequencies of the modes of
vibration.
Below are the first four modes of vibration, or harmonics of a guitar string. The wavelength of
the harmonic shortens as the frequency increases. The higher the frequency, the higher the pitch
that is the sensation one hears.
Figure 4.13(a): First Harmonic of a Guitar String
Figure 4.13(b): Second Harmonic of a Guitar String
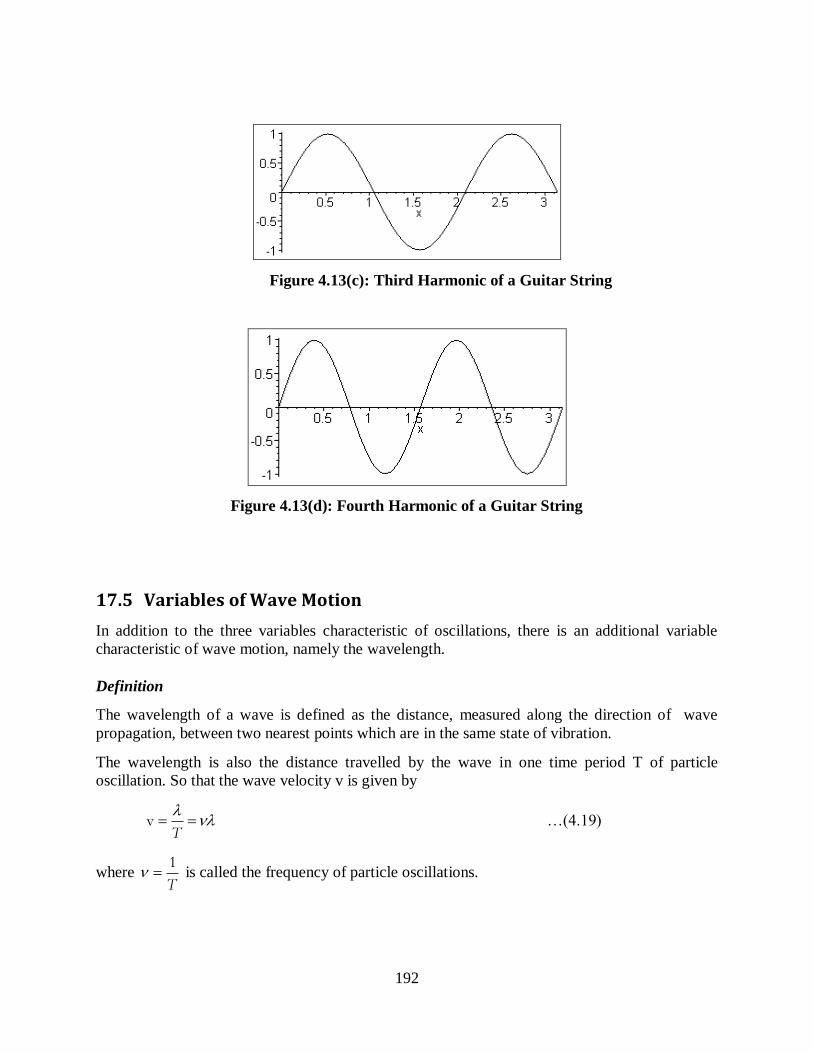
192
Figure 4.13(c): Third Harmonic of a Guitar String
Figure 4.13(d): Fourth Harmonic of a Guitar String
17.5 Variables of Wave Motion
In addition to the three variables characteristic of oscillations, there is an additional variable
characteristic of wave motion, namely the wavelength.
Definition
The wavelength of a wave is defined as the distance, measured along the direction of wave
propagation, between two nearest points which are in the same state of vibration.
The wavelength is also the distance travelled by the wave in one time period T of particle
oscillation. So that the wave velocity v is given by
vT
…(4.19)
where 1
T is called the frequency of particle oscillations.
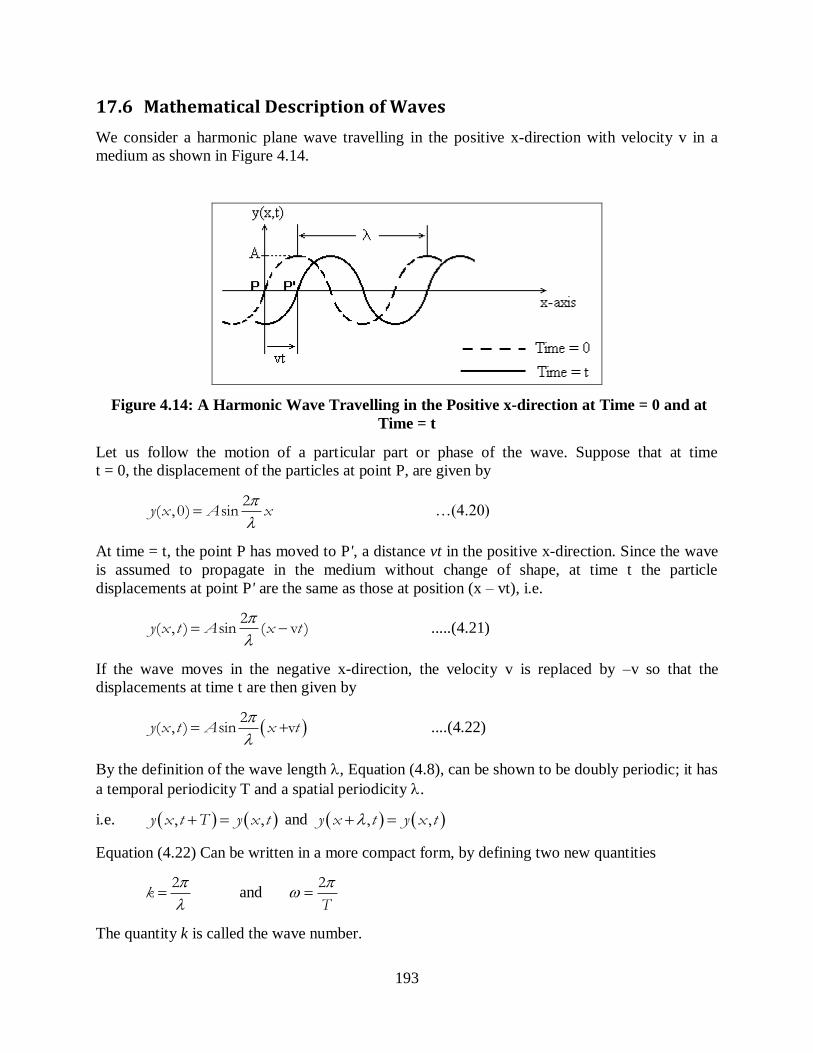
193
17.6 Mathematical Description of Waves
We consider a harmonic plane wave travelling in the positive x-direction with velocity v in a
medium as shown in Figure 4.14.
Figure 4.14: A Harmonic Wave Travelling in the Positive x-direction at Time = 0 and at
Time = t
Let us follow the motion of a particular part or phase of the wave. Suppose that at time
t = 0, the displacement of the particles at point P, are given by
2( , 0) siny x A x
…(4.20)
At time = t, the point P has moved to P', a distance vt in the positive x-direction. Since the wave
is assumed to propagate in the medium without change of shape, at time t the particle
displacements at point P' are the same as those at position (x – vt), i.e.
2( , ) sin ( v )y x t A x t
.....(4.21)
If the wave moves in the negative x-direction, the velocity v is replaced by –v so that the
displacements at time t are then given by
2
( , ) sin vy x t A x t
....(4.22)
By the definition of the wave length , Equation (4.8), can be shown to be doubly periodic; it has
a temporal periodicity T and a spatial periodicity .
i.e. , ,y x t T y x t and , ,y x t y x t
Equation (4.22) Can be written in a more compact form, by defining two new quantities
2k
and
2
T
The quantity k is called the wave number.

194
In terms of k and , Equation (4.21) becomes
2 v2( , ) sin
ty x t A x
( , ) sin 2y x t A kx t
( , ) sin ( – )y x t A kx t …(4.23)
For propagation in the negative x-direction
, siny x t A t kx …(4.24)
Take Note
The waves described above by the sine function can equally well be described by the cosine
function.
17.7 Wave Equation
The differential equation that governs the propagation of one-dimensional waves described by
Equations.(4.28) and (4.29) is given by:
2 2
2
2 2
, ,v
y x t y x t
t x
…(4.25)
Take Note
Equation (4.30) is called the classical wave equation or simply the Wave Equation.
Example: Given a plane wave
y(x,t) = 0.01 sin (0.02x - 4t)
Calculate (a) the wavelength, velocity and frequency of the wave; ( b) the phase difference
between two positions of the same particle at time interval of 0.25 s; and (c) the phase difference,
at a given instant of time, between two particles 50 m apart.
Solution:
The given equation can be written in the form

195
2( , ) 0.01sin 200
100y x t x t
Comparing with the wave equation
2( , ) sin vy x t A x t
We have,
the wavelength = 100 m
the wave velocity v = 200 m/s
and the frequency = v/ = 2.0 Hz
The phase change in a time interval t is
2. 2 . 2 .2.0.25t t
The phase difference for the path difference of x is
2 2. .50
100x
17.8 Interference of Waves
When two or more waves combine at a particular point, they are said to interfere and the
phenomenon is called interference.
There are two cases of interference:
1. Constructive interference in which the waves reinforce each other giving rise to a
resultant wave having an amplitude equal to the sum of the individual wave amplitudes.
2. Destructive interference in which the waves tend to cancel each other out giving rise to a
resultant wave having an amplitude close to zero.
Let us consider two waves of the same frequency and amplitude but different phase constants
both traveling in the +x-direction.
1 1( , ) siny x t A kx t …(4.26)
2 2( , ) siny x t A kx t …(4.27)
These waves could be propagating in any medium. Interference arises from the superposition of
the two waves. Thus adding Equations (4.26) and (4.27) we have
1 2( , ) ( , ) ( , )y x t y x t y x t

196
1 2sin sinA kx t A kx t
From the trigonometric identity
sinP +sinQ = 2sin½(P+Q)cos½(P–Q)
We obtain
1 2 2 1
1 1( , ) 2 sin 2 2 cos
2 2y x t A kx t
2 1 1 2
1 12 cos sin
2 2A kx t
1
( , ) 2 cos sin2
y x t A kx t …(4.28)
where
1 2
1
2 and 2 1
The quantity is called the phase difference between the two waves.
Equation (4.28) corresponds to a new wave having the same frequency but with an amplitude
2Acos(/2). If is very small in comparison with 180, the resultant amplitude is nearly
2A, twice the amplitude of either wave, this is constructive interference; on the other hand if
is close to 180 the resultant amplitude is nearly zero, this is destructive interference.
Two waves are said to be in phase when = 0 and are out of phase when = 180.
If the individual wave amplitudes are A1 and A2, the resultant wave amplitude is A1 + A2 if the
waves are in phase, while the resultant amplitude is A1 – A2 if they are out of phase.
Example: Two waves travel in the same direction along a string and interfere. The waves have
the same wavelength and travel with the same speed. The amplitude of each wave is 9.7 mm and
there is a phase difference of 110 between them. Calculate the amplitude of the combined wave
resulting from the interference of the two waves.
Solution:
The amplitude of the combined wave is given by
( , ) 2 cos ( , ) 2(9.7) cos(110/2) 11.1y x t A y x t mm

197
17.9 Standing Waves
When two or more waves travelling along the same direction combine they may interfere
destructively or constructively. On the other hand when the waves travel in opposite directions
the superposition gives rise to standing waves.
We consider two waves of equal amplitude and frequency moving in opposite direction a string.
1( , ) sin( )y x t A kx t
2( , ) sin( )y x t A kx t
Superposition gives rise to
1 2( , ) ( , ) ( , )y x t y x t y x t
sin( ) sin( )A kx t A kx t
( , ) 2 sin cosy x t A kx t …(4.29)
Take Note
Equation (4.34) is an equation of a Standing wave because the space and time variables, x
and t, do not appear as argument of the same trigonometric function as required for a
travelling wave.
In a travelling wave, each particle of the string vibrates with the same amplitude. In a standing
wave, the amplitude is not the same for different particles but varies for different location x of
the particle.
In Equation (4.29), the amplitude, 2Asinkx, is maximum at positions where
3 5; ; ......2 2 2
kx
Or 3 5; ; ........4 4 4
x
…(4.30)
Points of maximum amplitude in a standing wave are called antinodes. They are spaced one-half
wavelength apart.
On the other hand, the amplitude of the standing wave is minimum with value zero at positions
where
, 2 ,3 ....kx
or 3
, , , ......2 2
x
…(4.31)
198
Points of minimum amplitude in a standing wave are called nodes. They are also spaced one-half
wavelength apart. Hence, the separation between nodes and antinodes is a quarter wavelength.
Summary
i. A wave is a pulse of energy. Waves carry energy away from a central transmitter.
ii. Waves can be classified into mechanical waves and electromagnetic waves.
iii. Mechanical waves such as sound waves need some medium of transmission.
Electromagnetic waves, for example, radio waves can carry energy through a vacuum.
iv. When two or more waves travelling along the same direction combine they may interfere
destructively or constructively
v. In an oscillating system, the force always acts in a direction opposite to the displacement
of the particle from the equilibrium point.
The point of maximum displacement is defined as the amplitude of the oscillation.
Period of oscillation denotes the time it takes for an oscillating particle to return to its initial
position.
Frequency is defined as the number of cycles per unit time
Exercise 1. A wave has an amplitude of 2 cm and a frequency of 12 Hz, and the distance from a crest
to the nearest trough is measured to be 5 cm. Determine the period of such a wave.
2. A fly flaps its wings back and forth 150 times each second. Determine the period of a
wing flap.
3. A transverse wave is found to have a distance of 8 cm from a trough to a crest, a
frequency of 12 Hz, and a distance of 6 cm from a crest to the nearest trough. Determine
the amplitude, period, and wavelength of such a wave.
4. An ocean wave has an amplitude of 2.5 m. Weather conditions suddenly change such that
the wave has an amplitude of 5.0 m. Determine the amount of energy transported by the
wave.
5. In Figure 1, determine the time required for the waves, v = 340 m/s to travel from the
tuning fork to point P is
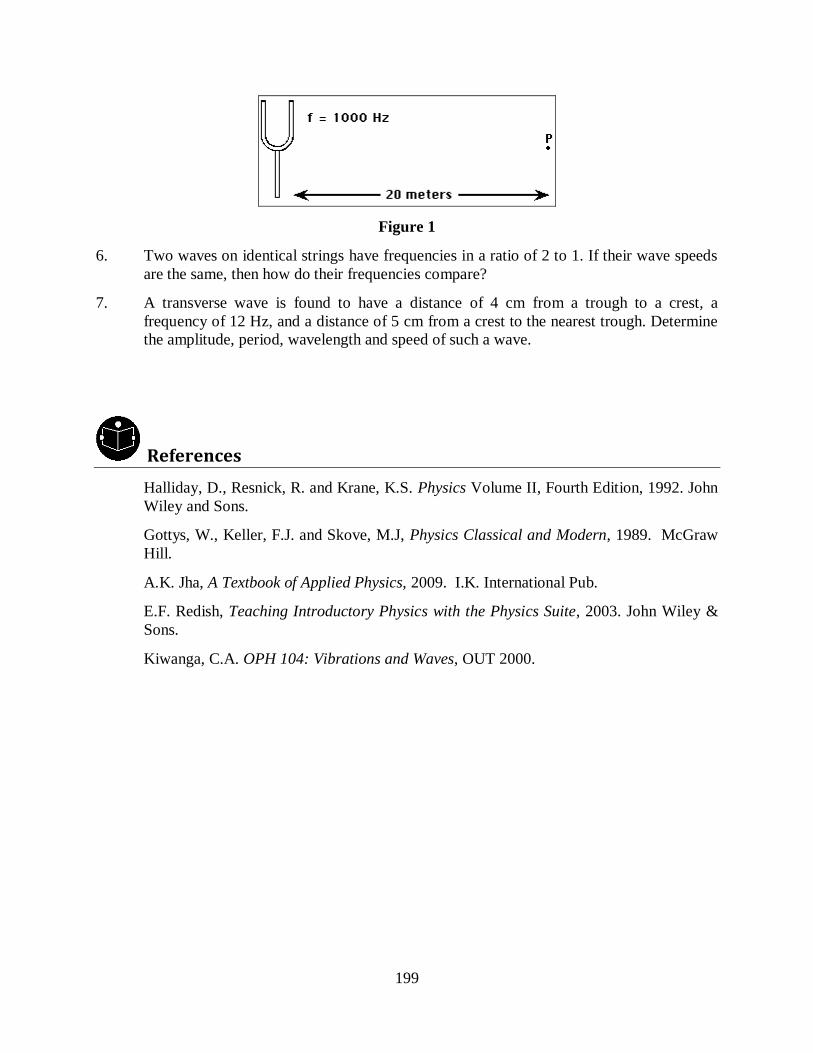
199
Figure 1
6. Two waves on identical strings have frequencies in a ratio of 2 to 1. If their wave speeds
are the same, then how do their frequencies compare?
7. A transverse wave is found to have a distance of 4 cm from a trough to a crest, a
frequency of 12 Hz, and a distance of 5 cm from a crest to the nearest trough. Determine
the amplitude, period, wavelength and speed of such a wave.
References
Halliday, D., Resnick, R. and Krane, K.S. Physics Volume II, Fourth Edition, 1992. John
Wiley and Sons.
Gottys, W., Keller, F.J. and Skove, M.J, Physics Classical and Modern, 1989. McGraw
Hill.
A.K. Jha, A Textbook of Applied Physics, 2009. I.K. International Pub.
E.F. Redish, Teaching Introductory Physics with the Physics Suite, 2003. John Wiley &
Sons.
Kiwanga, C.A. OPH 104: Vibrations and Waves, OUT 2000.
200
SECTION SIX:
ELECTRONICS
Lecture 18: Electronics
18.1 Introduction
Summary of the valve history
The vacuum tube or thermionic valve brought the dawn of the age of electronics. Its invention
enabled the wireless technology of the day to move forward.
The history of the vacuum tube or thermionic valve brings many individual discoveries together
that enable the invention to be made.
The history of the thermionic valve also moves on to tell of the further developments that were
made.
All these individual elements take their place in the overall history of the thermionic valve or
vacuum tube.
Lecture Objectives At the end of this lecture, you should be able to do the following:
(i) Outline the origins of the valve or vacuum tube.
(ii) Describe the diode valve.
(iii)Describe the diode rectification.
(iv) Describe the common examples of semiconductors.
(v) Describe features of intrinsic and extrinsic semiconductors.
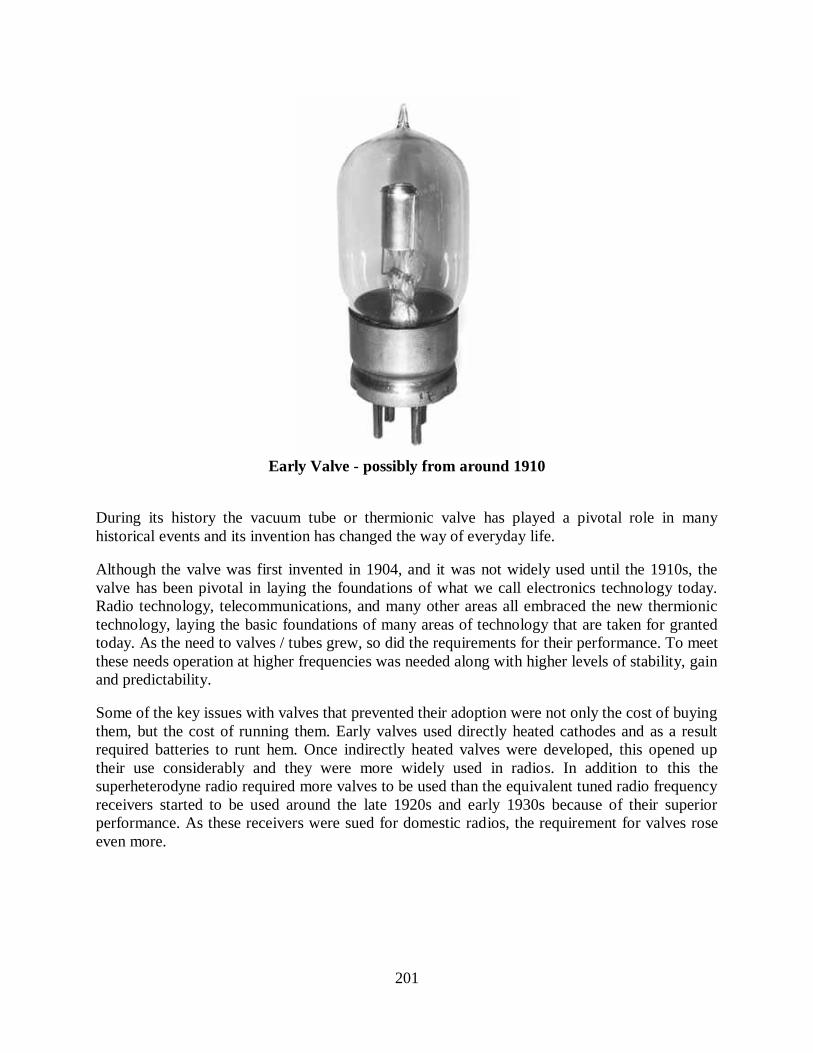
201
Early Valve - possibly from around 1910
During its history the vacuum tube or thermionic valve has played a pivotal role in many
historical events and its invention has changed the way of everyday life.
Although the valve was first invented in 1904, and it was not widely used until the 1910s, the
valve has been pivotal in laying the foundations of what we call electronics technology today.
Radio technology, telecommunications, and many other areas all embraced the new thermionic
technology, laying the basic foundations of many areas of technology that are taken for granted
today. As the need to valves / tubes grew, so did the requirements for their performance. To meet
these needs operation at higher frequencies was needed along with higher levels of stability, gain
and predictability.
Some of the key issues with valves that prevented their adoption were not only the cost of buying
them, but the cost of running them. Early valves used directly heated cathodes and as a result
required batteries to runt hem. Once indirectly heated valves were developed, this opened up
their use considerably and they were more widely used in radios. In addition to this the
superheterodyne radio required more valves to be used than the equivalent tuned radio frequency
receivers started to be used around the late 1920s and early 1930s because of their superior
performance. As these receivers were sued for domestic radios, the requirement for valves rose
even more.

202
18.2 Diode Valve/Vacuum Tube
The diode valve or vacuum tube can be used as a rectifier, and in addition to this its operation
forms the basis of operation on which other forms of valve or tube are built.
The diode valve or tube is still widely used and in years gone by, vast quantities of these devices
were used.
The diode valve is the most basic of all thermionic or vacuum tube devices having only two
active electrodes, nevertheless it is still an important component whose operation needs to be
understood if other forms of vacuum tube or thermionic valve technology are to be
comprehended.
a- anode, g-grid and k- cathode
Diode valve basics
The most basic form of diode valve or vacuum tube is the diode. It consists of two conducting
electrodes that are contained within an evacuated glass envelope. These are named the cathode
and anode.
The cathode is heated and it is found that electrons ‘boil’ off from the electrode as a result of the
energy they have as a result of the heat. The negatively charged electrons leave a positive charge
on the cathode which tends to draw them back and as a result a cloud of electrons exists around
the cathode, reducing in intensity as the distance from the cathode increases. Those electrons that
travel furthest have the most energy.
Nevertheless it is found that if a resistor is placed between the cathode and anode, it will be seen
that a current actually flows as a result of the electrons that are given off by the cathode. If a
resistor is placed between anode and cathode of a diode valve then current will flow. If an
electron has sufficient energy to reach the anode, then it will stay there are it will not have
enough energy to escape, but they can flow back to the cathode via the external resistor.
It can be seen that electron current can flow from the cathode towards the anode as a result of
electrons escaping from the cathode, but electrons are unable to leave the anode.
As a result current is only able to flow in one direction. Therefore if a alternating signal is
applied to the diode valve or diode tube, then it will only allow half the cycle through, thereby
rectifying the signal.
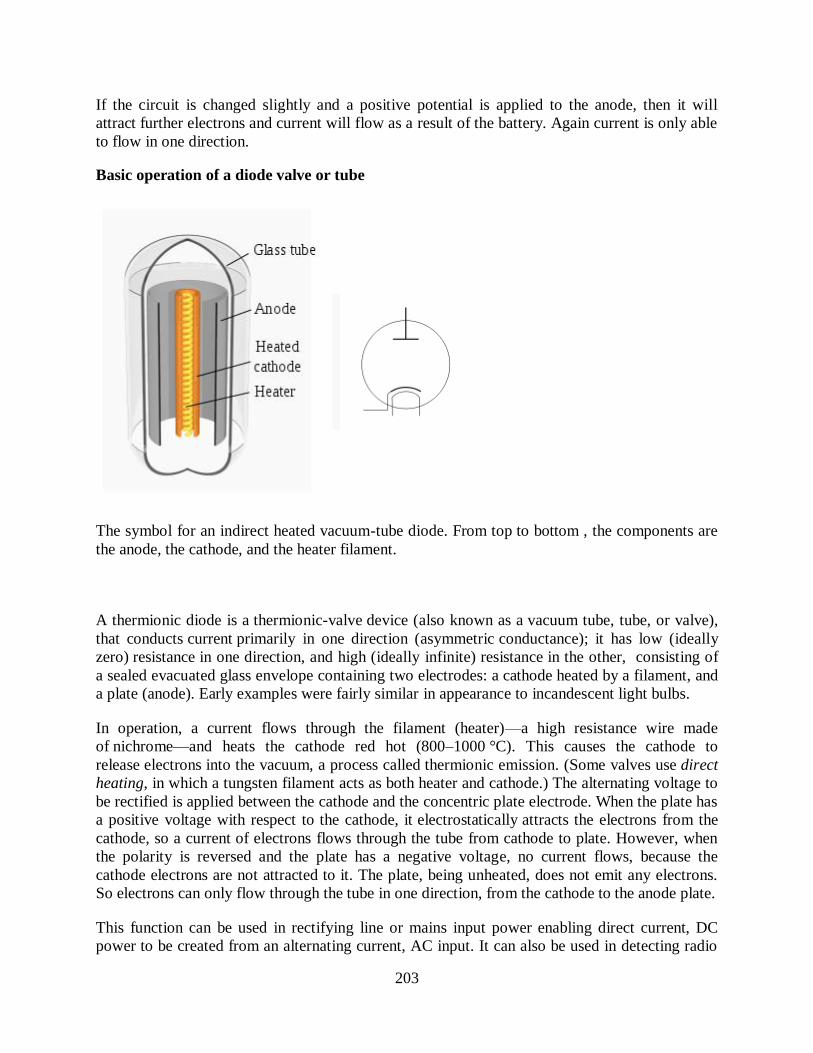
203
If the circuit is changed slightly and a positive potential is applied to the anode, then it will
attract further electrons and current will flow as a result of the battery. Again current is only able
to flow in one direction.
Basic operation of a diode valve or tube
The symbol for an indirect heated vacuum-tube diode. From top to bottom , the components are
the anode, the cathode, and the heater filament.
A thermionic diode is a thermionic-valve device (also known as a vacuum tube, tube, or valve),
that conducts current primarily in one direction (asymmetric conductance); it has low (ideally
zero) resistance in one direction, and high (ideally infinite) resistance in the other, consisting of
a sealed evacuated glass envelope containing two electrodes: a cathode heated by a filament, and
a plate (anode). Early examples were fairly similar in appearance to incandescent light bulbs.
In operation, a current flows through the filament (heater)—a high resistance wire made
of nichrome—and heats the cathode red hot (800–1000 °C). This causes the cathode to
release electrons into the vacuum, a process called thermionic emission. (Some valves use direct
heating, in which a tungsten filament acts as both heater and cathode.) The alternating voltage to
be rectified is applied between the cathode and the concentric plate electrode. When the plate has
a positive voltage with respect to the cathode, it electrostatically attracts the electrons from the
cathode, so a current of electrons flows through the tube from cathode to plate. However, when
the polarity is reversed and the plate has a negative voltage, no current flows, because the
cathode electrons are not attracted to it. The plate, being unheated, does not emit any electrons.
So electrons can only flow through the tube in one direction, from the cathode to the anode plate.
This function can be used in rectifying line or mains input power enabling direct current, DC
power to be created from an alternating current, AC input. It can also be used in detecting radio
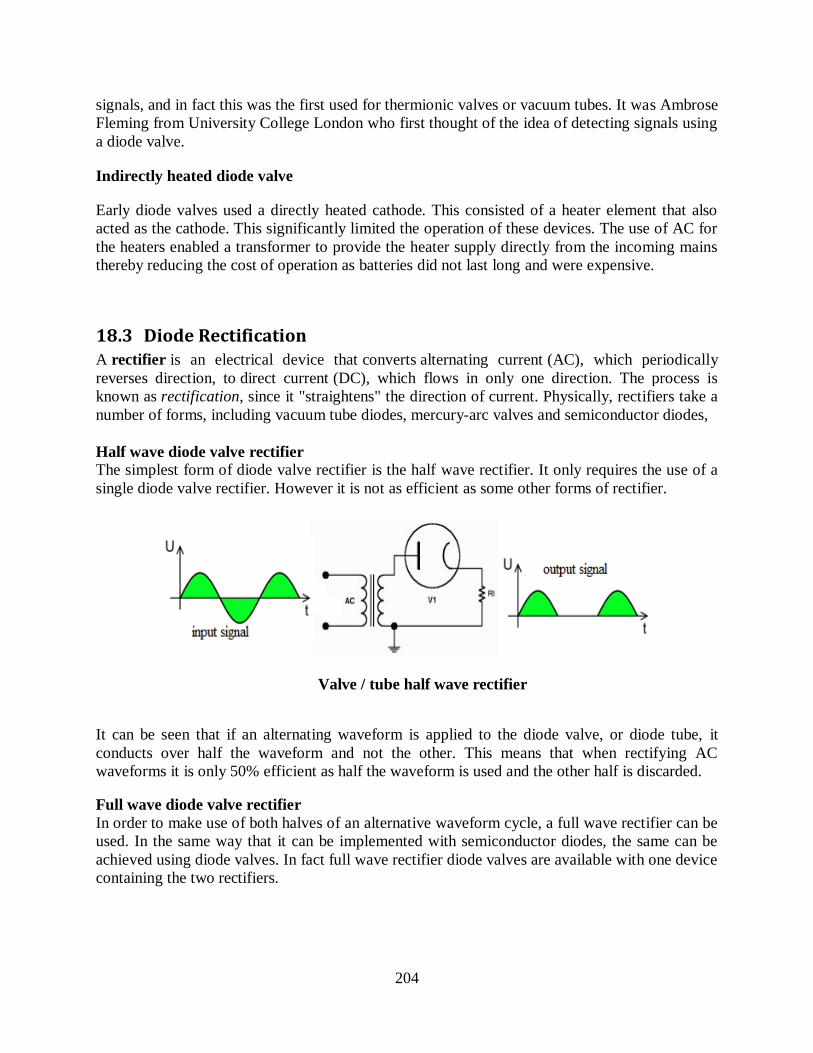
204
signals, and in fact this was the first used for thermionic valves or vacuum tubes. It was Ambrose
Fleming from University College London who first thought of the idea of detecting signals using
a diode valve.
Indirectly heated diode valve
Early diode valves used a directly heated cathode. This consisted of a heater element that also
acted as the cathode. This significantly limited the operation of these devices. The use of AC for
the heaters enabled a transformer to provide the heater supply directly from the incoming mains
thereby reducing the cost of operation as batteries did not last long and were expensive.
18.3 Diode Rectification A rectifier is an electrical device that converts alternating current (AC), which periodically
reverses direction, to direct current (DC), which flows in only one direction. The process is
known as rectification, since it "straightens" the direction of current. Physically, rectifiers take a
number of forms, including vacuum tube diodes, mercury-arc valves and semiconductor diodes,
Half wave diode valve rectifier
The simplest form of diode valve rectifier is the half wave rectifier. It only requires the use of a
single diode valve rectifier. However it is not as efficient as some other forms of rectifier.
Valve / tube half wave rectifier
It can be seen that if an alternating waveform is applied to the diode valve, or diode tube, it
conducts over half the waveform and not the other. This means that when rectifying AC
waveforms it is only 50% efficient as half the waveform is used and the other half is discarded.
Full wave diode valve rectifier
In order to make use of both halves of an alternative waveform cycle, a full wave rectifier can be
used. In the same way that it can be implemented with semiconductor diodes, the same can be
achieved using diode valves. In fact full wave rectifier diode valves are available with one device
containing the two rectifiers.
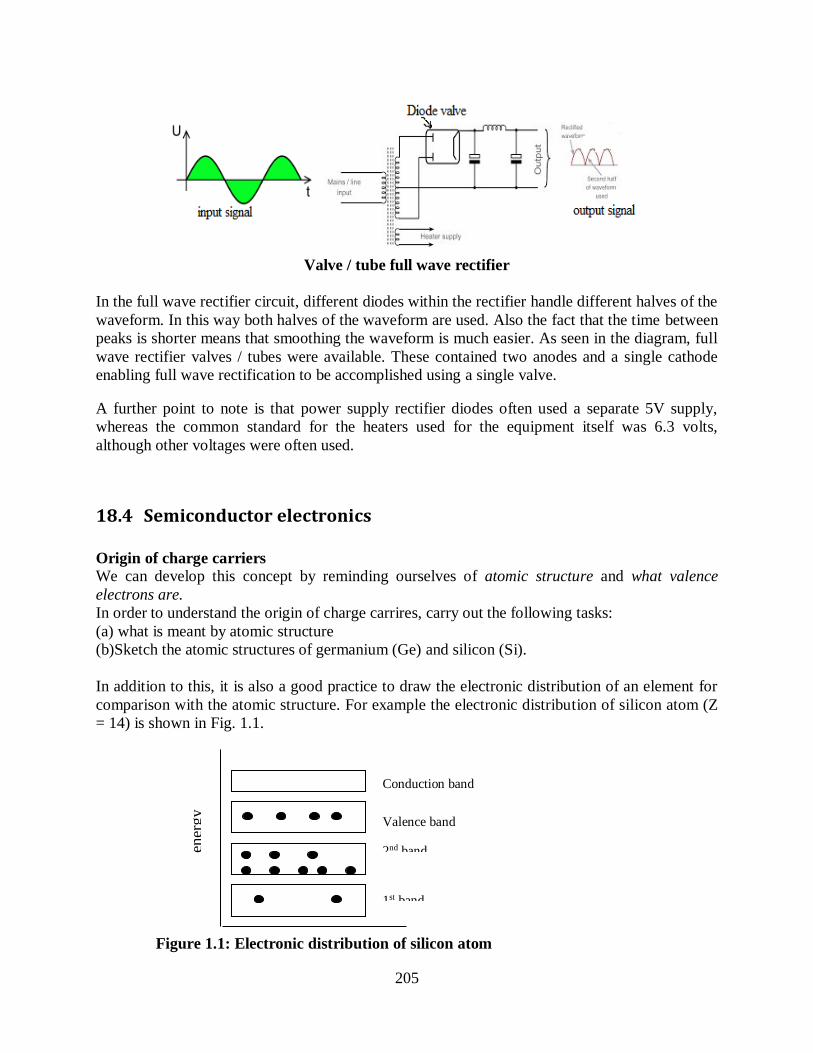
205
Valve / tube full wave rectifier
In the full wave rectifier circuit, different diodes within the rectifier handle different halves of the
waveform. In this way both halves of the waveform are used. Also the fact that the time between
peaks is shorter means that smoothing the waveform is much easier. As seen in the diagram, full
wave rectifier valves / tubes were available. These contained two anodes and a single cathode
enabling full wave rectification to be accomplished using a single valve.
A further point to note is that power supply rectifier diodes often used a separate 5V supply,
whereas the common standard for the heaters used for the equipment itself was 6.3 volts,
although other voltages were often used.
18.4 Semiconductor electronics
Origin of charge carriers
We can develop this concept by reminding ourselves of atomic structure and what valence
electrons are.
In order to understand the origin of charge carrires, carry out the following tasks:
(a) what is meant by atomic structure
(b)Sketch the atomic structures of germanium (Ge) and silicon (Si).
In addition to this, it is also a good practice to draw the electronic distribution of an element for
comparison with the atomic structure. For example the electronic distribution of silicon atom (Z
= 14) is shown in Fig. 1.1.
Figure 1.1: Electronic distribution of silicon atom
1st band
2nd band
Valence band
Conduction band
ener
gy
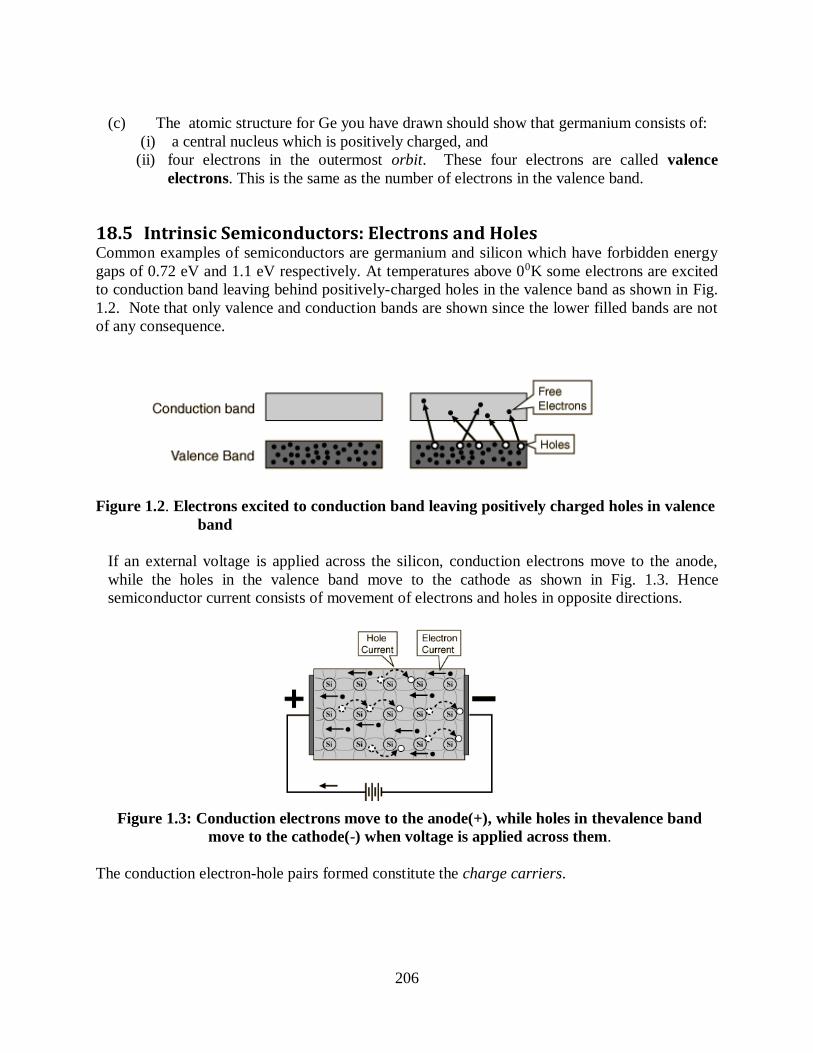
206
(c) The atomic structure for Ge you have drawn should show that germanium consists of:
(i) a central nucleus which is positively charged, and
(ii) four electrons in the outermost orbit. These four electrons are called valence
electrons. This is the same as the number of electrons in the valence band.
18.5 Intrinsic Semiconductors: Electrons and Holes Common examples of semiconductors are germanium and silicon which have forbidden energy
gaps of 0.72 eV and 1.1 eV respectively. At temperatures above 00K some electrons are excited
to conduction band leaving behind positively-charged holes in the valence band as shown in Fig.
1.2. Note that only valence and conduction bands are shown since the lower filled bands are not
of any consequence.
Figure 1.2. Electrons excited to conduction band leaving positively charged holes in valence
band
If an external voltage is applied across the silicon, conduction electrons move to the anode,
while the holes in the valence band move to the cathode as shown in Fig. 1.3. Hence
semiconductor current consists of movement of electrons and holes in opposite directions.
Figure 1.3: Conduction electrons move to the anode(+), while holes in thevalence band
move to the cathode(-) when voltage is applied across them.
The conduction electron-hole pairs formed constitute the charge carriers.
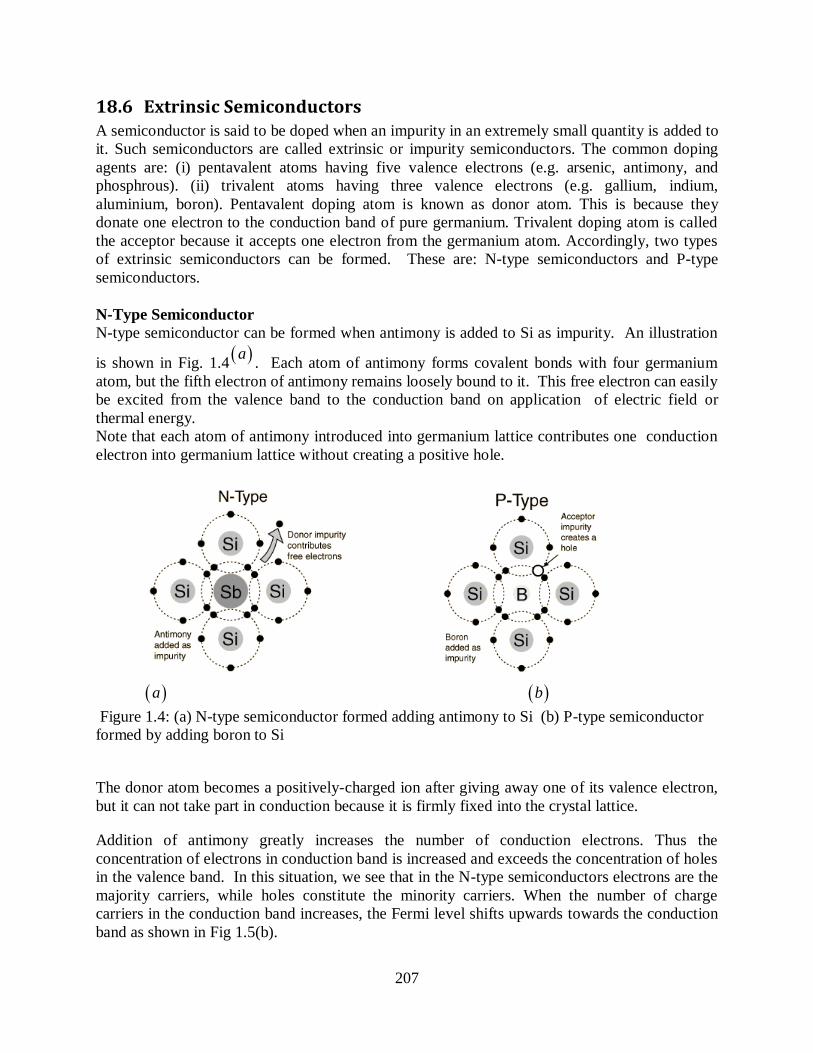
207
18.6 Extrinsic Semiconductors A semiconductor is said to be doped when an impurity in an extremely small quantity is added to
it. Such semiconductors are called extrinsic or impurity semiconductors. The common doping
agents are: (i) pentavalent atoms having five valence electrons (e.g. arsenic, antimony, and
phosphrous). (ii) trivalent atoms having three valence electrons (e.g. gallium, indium,
aluminium, boron). Pentavalent doping atom is known as donor atom. This is because they
donate one electron to the conduction band of pure germanium. Trivalent doping atom is called
the acceptor because it accepts one electron from the germanium atom. Accordingly, two types
of extrinsic semiconductors can be formed. These are: N-type semiconductors and P-type
semiconductors.
N-Type Semiconductor
N-type semiconductor can be formed when antimony is added to Si as impurity. An illustration
is shown in Fig. 1.4 a
. Each atom of antimony forms covalent bonds with four germanium
atom, but the fifth electron of antimony remains loosely bound to it. This free electron can easily
be excited from the valence band to the conduction band on application of electric field or
thermal energy.
Note that each atom of antimony introduced into germanium lattice contributes one conduction
electron into germanium lattice without creating a positive hole.
a
b
Figure 1.4: (a) N-type semiconductor formed adding antimony to Si (b) P-type semiconductor
formed by adding boron to Si
The donor atom becomes a positively-charged ion after giving away one of its valence electron,
but it can not take part in conduction because it is firmly fixed into the crystal lattice.
Addition of antimony greatly increases the number of conduction electrons. Thus the
concentration of electrons in conduction band is increased and exceeds the concentration of holes
in the valence band. In this situation, we see that in the N-type semiconductors electrons are the
majority carriers, while holes constitute the minority carriers. When the number of charge
carriers in the conduction band increases, the Fermi level shifts upwards towards the conduction
band as shown in Fig 1.5(b).
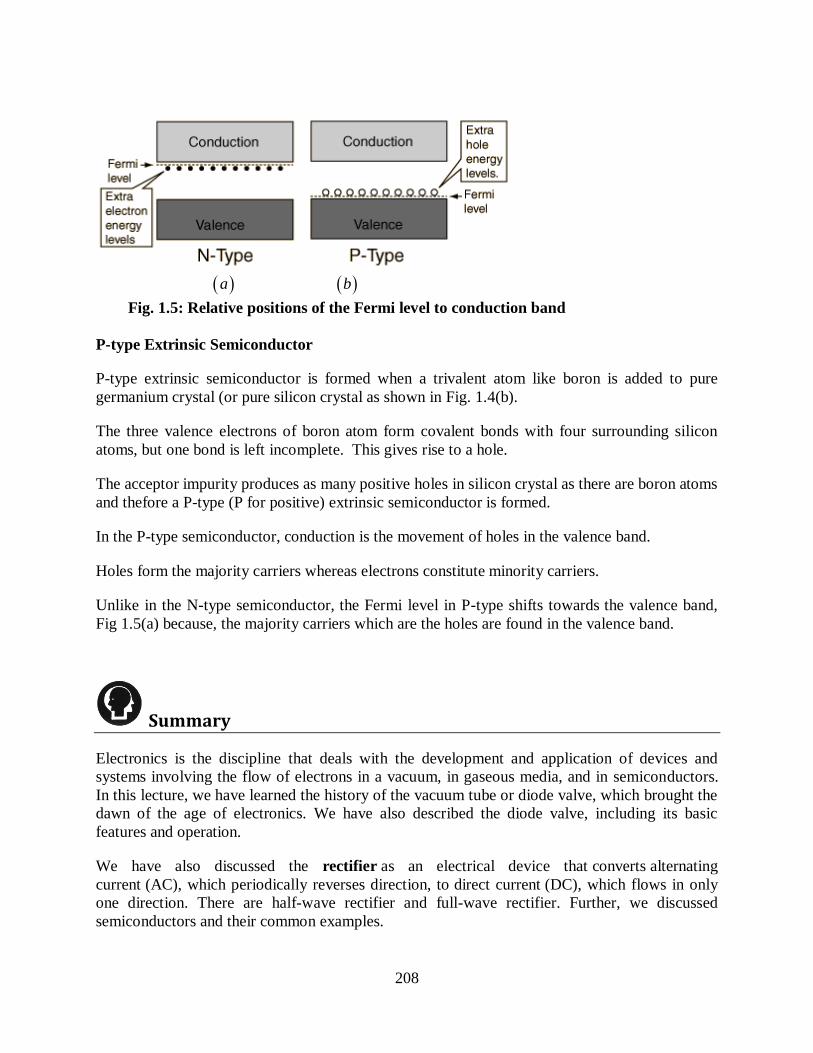
208
a
b
Fig. 1.5: Relative positions of the Fermi level to conduction band
P-type Extrinsic Semiconductor
P-type extrinsic semiconductor is formed when a trivalent atom like boron is added to pure
germanium crystal (or pure silicon crystal as shown in Fig. 1.4(b).
The three valence electrons of boron atom form covalent bonds with four surrounding silicon
atoms, but one bond is left incomplete. This gives rise to a hole.
The acceptor impurity produces as many positive holes in silicon crystal as there are boron atoms
and thefore a P-type (P for positive) extrinsic semiconductor is formed.
In the P-type semiconductor, conduction is the movement of holes in the valence band.
Holes form the majority carriers whereas electrons constitute minority carriers.
Unlike in the N-type semiconductor, the Fermi level in P-type shifts towards the valence band,
Fig 1.5(a) because, the majority carriers which are the holes are found in the valence band.
Summary
Electronics is the discipline that deals with the development and application of devices and
systems involving the flow of electrons in a vacuum, in gaseous media, and in semiconductors.
In this lecture, we have learned the history of the vacuum tube or diode valve, which brought the
dawn of the age of electronics. We have also described the diode valve, including its basic
features and operation.
We have also discussed the rectifier as an electrical device that converts alternating
current (AC), which periodically reverses direction, to direct current (DC), which flows in only
one direction. There are half-wave rectifier and full-wave rectifier. Further, we discussed
semiconductors and their common examples.

209
References
Chattopadhyay, D., Rakshit, P. C. and Saha, B. (2009). Foundations of Electronics,
Revised Second Ed. New Age International Publishers: India
Related Documents











