Numerical piecewise approximate solution of Fredholm integro-differential equations by the Tau method S. Mohammad Hosseini a, * , S. Shahmorad b a Department of Mathematics, Tarbiat Modarres University, P.O. Box 14115-175, Tehran, Iran b Department of Applied Mathematics, Tabriz University, Tabriz, Iran Received 1 October 2003; received in revised form 1 December 2004; accepted 8 February 2005 Available online 19 March 2005 Abstract A general form of numerical piecewise approximate solution of linear integro-differential equations of Fredholm type is discussed. It is formulated for using the operational Tau method to convert the differential part of a given integro-differential equation, or IDE for short, to its matrix representation. This formulation of the Tau method can be useful for such problems over long intervals and also can be used as a good and simple alternative algorithm for other piecewise approximations such as splines or collocation. A Tau error estimator is also adapted for piecewise application of the Tau method. Some numerical examples are con- sidered to demonstrate the implementation and general effect of application of this (segmented) piecewise Chebyshev Tau method. Ó 2005 Elsevier Inc. All rights reserved. Keywords: Piecewise approximate; Piecewise Tau method; Integro-differential equations; Segmented Tau method 1. Introduction We extend (see [1–4]), the operational approach of the Tau method (see [5]), to the numerical solution of general form of linear Fredholm and Volterra integro-differential equations and obtain accurate results, except for the problems defined over a long interval. 0307-904X/$ - see front matter Ó 2005 Elsevier Inc. All rights reserved. doi:10.1016/j.apm.2005.02.003 * Corresponding author. E-mail address: [email protected] (S.M. Hosseini). www.elsevier.com/locate/apm Applied Mathematical Modelling 29 (2005) 1005–1021

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
www.elsevier.com/locate/apm
Applied Mathematical Modelling 29 (2005) 1005–1021
Numerical piecewise approximate solution of Fredholmintegro-differential equations by the Tau method
S. Mohammad Hosseini a,*, S. Shahmorad b
a Department of Mathematics, Tarbiat Modarres University, P.O. Box 14115-175, Tehran, Iranb Department of Applied Mathematics, Tabriz University, Tabriz, Iran
Received 1 October 2003; received in revised form 1 December 2004; accepted 8 February 2005Available online 19 March 2005
Abstract
A general form of numerical piecewise approximate solution of linear integro-differential equations ofFredholm type is discussed. It is formulated for using the operational Tau method to convert the differentialpart of a given integro-differential equation, or IDE for short, to its matrix representation. This formulationof the Tau method can be useful for such problems over long intervals and also can be used as a good andsimple alternative algorithm for other piecewise approximations such as splines or collocation. A Tau errorestimator is also adapted for piecewise application of the Tau method. Some numerical examples are con-sidered to demonstrate the implementation and general effect of application of this (segmented) piecewiseChebyshev Tau method.� 2005 Elsevier Inc. All rights reserved.
Keywords: Piecewise approximate; Piecewise Tau method; Integro-differential equations; Segmented Tau method
1. Introduction
We extend (see [1–4]), the operational approach of the Tau method (see [5]), to the numericalsolution of general form of linear Fredholm and Volterra integro-differential equations and obtainaccurate results, except for the problems defined over a long interval.
0307-904X/$ - see front matter � 2005 Elsevier Inc. All rights reserved.doi:10.1016/j.apm.2005.02.003
* Corresponding author.E-mail address: [email protected] (S.M. Hosseini).

1006 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
In this method, we only replace the operator matrix representation for the differential part ofthe equation using the operational Tau method. However, a full matrix formulation of the Taumethod [3] can also be implemented, for which the details appear in another paper. The remainderof the paper is organized as follows:
Section 2, is devoted to introducing the problem and some preliminary results concerning theTau method. In Section 3, details of the formulation of the new method are explained. In Section4, the way of implementing the method is demonstrated. Section 5 provides some numericalresults used to clarify the efficiency of the method.
2. The problem and some preliminary results of the Tau method
Let us consider the general linear Fredholm integro-differential equation
DyðxÞ � kZ b
akðx; tÞyðtÞdt ¼ f ðxÞ; x 2 ½a; b� ð2:1Þ
with m independent conditions
Xmk¼1cð1Þjk yðk�1ÞðaÞ þ cð2Þjk y
ðk�1ÞðbÞh i
¼ cj; j ¼ 1; . . . ; m; ð2:2Þ
where cj is constant and m is the order of the differential operator D with polynomial coefficientspi(x)
D ¼Xmr¼0
prðxÞdr
dxr; prðxÞ ¼
Xarj¼0
prjxj ¼ p
rX ; ð2:3Þ
where ar is the degree of pr(x), pr¼ ðpr0; pr1; . . . ; prar ; 0; 0; . . .Þ and X ¼ ð1; x; . . . ÞT.
k(x,t) is a bivariate polynomial or its bivariate Tau polynomial approximation of degree pairs,say, (k1,k2). Similarly, f(x) is a polynomial or a suitable polynomial approximation of it.
The operational Tau method is generally based on three simple matrices
g ¼
0 0 0 0 � � �1 0 0 0 � � �0 2 0 0 � � �... ..
. ... ..
. . ..
0BBBB@
1CCCCA; l ¼
0 1 0 0 � � �0 0 1 0 � � �0 0 0 1 � � �... ..
. ... ..
. . ..
0BBBB@
1CCCCA; i ¼
0 1 0 0 � � �0 0 1
20 � � �
0 0 0 13
� � �
..
. ... ..
. ... . .
.
0BBBB@
1CCCCA:
In this paper, we have only used g, l for the differential part of (2.1). See [5] for more applica-tion of these three matrices. The matrices g, l have the following effects:
Lemma 2.1. If yn(x) = anX, with an = (a0,a1, . . . , an, 0,0, . . .), then
dynðxÞdx
¼ angX ; xynðxÞ ¼ a
nlX :
Let V = {vi(x):i = 0,1, . . .} be a polynomial base given by V = VX where V is a nonsingular lowertriangular matrix and V �1 its inverse.

S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1007
We recall the following theorem from [5]:
Theorem 2.2. For any linear differential operator D defined by (2.3) and any series y(x) = bV, b =(b0,b1, . . .) or y(x) = aX, a = (a0,a1, . . .) we have
DyðxÞ ¼ aYx
X ¼ bYv
V ; ð2:4Þ
where
Yx¼Xmi¼0
gipiðlÞ;Yv
¼ VYx
V �1: ð2:5Þ
3. Formulation of the piecewise method
Let
a ¼ x0 < x1 < � � � < xn ¼ b
be a partition of [a,b], and
½xi�m; xðiþ1Þ�m�;
i = 0,1, . . ., p � 1, with p ¼ nm, be subintervals of [a,b], on which we want to approximate the solu-tion y(x) of (2.1) and (2.2), as pieces of polynomials yi(x) of degree m with unknown coefficientsyi0, . . .,yim, i.e.,
yðxÞ �
Pmj¼0
y0jv�0jðxÞ; x 2 ½x0; xm�;
Pmj¼0
y1jv�1jðxÞ; x 2 ½xm; x2m�;
..
. ...
Pmj¼0
yp�1;jv�p�1jðxÞ; x 2 ½xn�m; xn�;
8>>>>>>>>>>><>>>>>>>>>>>:
ð3:1Þ
where the basis functions v�ijðxÞ are shifted to suitable polynomials (such as Chebyshev or Legen-dre) of degree j in [xi·m,x(i+1)·m] for j = 0,1, . . .. We set
V �i ¼ v�i0ðxÞ; v�i1ðxÞ; . . .
� �T ð3:2Þ
so that expansion of the functions k(x,t), f(x) and y(x) for x 2 [xi·m, x(i+1)·m], t 2 [tj·m, t(j+1)·m]and i, j = 0,1, . . ., p � 1, can be expressed as
kðx; tÞ �Xmr¼0
Xmq¼0
kijrqv�irðxÞv�jqðtÞ; ð3:3Þ
f ðxÞ � fiðxÞ ¼Xmr¼0
firv�irðxÞ ¼ fiV �
i ð3:4Þ

1008 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
and
yðxÞ � yiðxÞ ¼Xmr¼0
yirv�irðxÞ ¼ y
iV �
i ; ð3:5Þ
where fi = (fi0, fi1, . . ., fim, 0,0, . . .) and yi = (yi0,yi1, . . ., yim, 0,0, . . .).Hence, on [xi·m,x(i+1)·m], using Theorem 2.2, we have
DyðxÞ ¼ yi
Yvi
V �i : ð3:6ÞQ
Note that viis computed by (2.5), after restricting V to this subinterval.
Substituting k(x,t) and yi(t) from (3.3) and (3.5) into integral part of (2.1), one obtains
Z bakðx; tÞyiðtÞdt �
Xmr¼0
Xmq¼0
Xml¼0
Xp�1
j¼0
yjlkijrqv�irðxÞ
Z tðjþ1Þ�m
tj�m
v�jqðtÞv�jlðtÞdt: ð3:7Þ
Setting
aljq ¼Z tðjþ1Þ�m
tj�m
v�jqðtÞv�jlðtÞdt ð3:8Þ
the coefficient of v�irðxÞ in (3.7) is then as follows:
Xmq¼0
Xml¼0
Xp�1
j¼0
yjlkijrqaljq ¼Xp�1
j¼0
yjRðiÞjr ð3:9Þ
with
RðiÞjr ¼
Pmq¼0
kijrqa0jq
..
.
Pmq¼0
kijrqamjq
0BBBBBB@
1CCCCCCA; i; j ¼ 0; 1; . . . ; p � 1: ð3:10Þ
So that
Z b
akðx; tÞyiðtÞdt �
Xmr¼0
Xp�1
j¼0
yjRðiÞjr
!v�irðxÞ ¼
Xp�1
j¼0
yjRðiÞj0 ; . . . ;R
ðiÞjm
� �V �
i
¼Xp�1
j¼0
yjAij
!V �
i ; i ¼ 0; 1; . . . ; p � 1 ð3:11Þ
with
Aij ¼ RðiÞj0 ; . . . ;R
ðiÞjm
� �: ð3:12Þ

S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1009
Therefore, using (3.4), (3.6) and (3.11) in (2.1), and recalling that V �i is a basis vector on [xi·m,
x(i+1)·m], the integral Eq. (2.1) is replaced by the following matrix equation
yi
Yvi
�kXp�1
j¼0
yjAij ¼ f
i; i ¼ 0; 1; . . . ; p � 1: ð3:13Þ
This result can equally be represented as
yi
Yvi
�k y0; . . . ; y
p�1
� � Ai0
..
.
Ai;p�1
0BB@
1CCA ¼ f
i; i ¼ 0; 1; . . . ; p � 1;
which represents (2.1) and can be rewritten as the following block system of linear equations:
y0; . . . ; y
p�1
� �Qv0
�kA00 �kA10 � � � �kAp�1;0
�kA01
Qv1
�kA11 � � � �kAp�1;0
..
. . .. ..
.
�kA0;p�1 �kA1;p�1 � � �Qvp�1
�kAp�1;p�1
0BBBBBBBB@
1CCCCCCCCA
¼ f0; . . . ; f
p�1
� �: ð3:14Þ
We finally obtain, from (3.10) and (3.12)
Aij ¼
Pmq¼0
kij0qa0jqPmq¼0
kij1qa0jq � � �Pmq¼0
kijmqa0jq
..
. ... ..
.
Pmq¼0
kij0qamjqPmq¼0
kij1qamjq � � �Pmq¼0
kijmqamjq
0BBBBBB@
1CCCCCCA; i; j ¼ 0; 1; . . . ; p � 1; ð3:15Þ
where
ðAijÞuw ¼Xmq¼0
kijwqaujq; u;w ¼ 0; 1; . . . ;m
and aujq are given by (3.8).
3.1. Continuity conditions
To force the continuity of y(x) and its derivatives up to order m � 1 at points x = xim,i = 1, . . ., p � 1, the equations
yðjÞi�1ðxÞ ¼ yðjÞi ðxÞ; j ¼ 0; 1; . . . ; m� 1; ð3:16Þ
must be satisfied at x = xim, i = 1, . . ., p � 1.
1010 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
Satisfying (3.16) at x = xim, from (3.5) and since degree of v�ij 6 j , one obtains
yi�1
v�i�1;0ðximÞ 0 � � � 0
v�i�1;1ðximÞ v�ð1Þi�1;1ðximÞ � � � 0
..
. ... ..
.
v�i�1;m�1ðximÞ v�ð1Þi�1;m�1ðximÞ � � � v�ðm�1Þi�1;m�1ðximÞ
..
. ... ..
.
v�i�1;mðximÞ v�ð1Þi�1;mðximÞ � � � v�ðm�1Þi�1;m ðximÞ
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
� yi
v�i;0ðximÞ 0 � � � 0
v�i;1ðximÞ v�ð1Þi;1 ðximÞ � � � 0
..
. ... ..
.
v�i;m�1ðximÞ v�ð1Þi;m�1ðximÞ � � � v�ðm�1Þi;m�1 ðximÞ
..
. ... ..
.
v�i;mðximÞ v�ð1Þi;m ðximÞ � � � v�ðm�1Þi;m ðximÞ
0BBBBBBBBBBBBB@
1CCCCCCCCCCCCCA
¼ ð0; 0; . . . ; 0Þ: ð3:17Þ
3.2. Matrix representation for supplementary conditions
Since a 2 [x0,xm] and b 2 [xn � m,xn], the supplementary conditions (2.2) must be written as
Xmk¼1
cð1Þjk yðk�1ÞðaÞ þ cð2Þjk y
ðk�1ÞðbÞ� �
¼Xmk¼1
cð1Þjk yðk�1Þ0 ðaÞ þ cð2Þjk y
ðk�1Þp�1 ðbÞ
� �
¼Xmk¼1
cð1Þjk yðk�1Þ0 ðaÞ þ
Xmk¼1
cð2Þjk yðk�1Þp�1 ðbÞ ð3:18Þ
and since
yiðxÞ ¼Xmr¼0
yirv�irðxÞ; i ¼ 0; 1; . . . ; p � 1;
we have for the first term of (3.18)
Xmk¼1
cð1Þjk yðk�1Þ0 ðaÞ ¼
Xmk¼1
cð1Þjk
Xmr¼0
y0rv�0rðaÞ
!¼Xmr¼0
y0rXmk¼1
cð1Þjk v�0rðaÞ ¼ y
0B0j
with

S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1011
B0j ¼
cð1Þj1 v�00ðaÞP2
k¼1
cð1Þjk v�ðk�1Þ01 ðaÞ
..
.
Pmk¼1
cð1Þjk v�ðk�1Þ0;m�1 ðaÞ
..
.
Pmk¼1
cð1Þjk v�ðk�1Þ0m ðaÞ
0BBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCA
: ð3:19Þ
Similarly, for the second term of (3.18)
Xmk¼1
cð2Þjk yðk�1Þp�1 ðbÞ ¼
Xmk¼1
cð2Þjk
Xmr¼0
yp�1;rv�p�1;rðbÞ
!¼Xmr¼0
yp�1;r
Xmk¼1
cð2Þjk v�p�1;rðbÞ ¼ y
p�1Bp�1;j
with
Bp�1;j ¼
cð2Þj1 v�p�1;0ðbÞP2
k¼1
cð2Þjk v�ðk�1Þp�1;1 ðbÞ
..
.
Pmk¼1
cð2Þjk v�ðk�1Þp�1;m�1ðbÞ
..
.
Pmk¼1
cð2Þjk v�ðk�1Þp�1;m ðbÞ
0BBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCA
: ð3:20Þ
Hence
Xmk¼1
cð1Þjk yðk�1ÞðaÞ þ cð2Þjk y
ðk�1ÞðbÞ� �
¼ y0B0j þ y
p�1Bp�1;j; j ¼ 1; . . . ; m: ð3:21Þ
We refer to B as the supplementary conditions matrix, B0j and Bp�1,j as jth columns of the sub-matrices of B in the first and last subintervals.
3.3. Determining the final linear equations
We recall that we want to approximate y(x) with
yiðxÞ ¼Xmr¼0
yirv�irðxÞ ¼ y
iV �
i

1012 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
in each subinterval of the form [xi·m,x(i+1)·m]. Since there are p subintervals of this form, the num-ber of required unknowns and corresponding linear equations will be (m + 1) · p. Note that thenumber of equations that can be obtained from continuity conditions (3.17) is equal to (p � 1) · m.We also obtain m equations from supplementary conditions (3.21). So, the total number of equa-tions that can be obtained from the continuity and supplementary conditions will be p · m. There-fore, we need
ðmþ 1Þ � p � p � m ¼ ðmþ 1� mÞ � p;
other linear equations that must be obtained from (3.14).Therefore, we have the following three steps:
Step 1. For i,j = 0, . . ., p � 1, l1 = 0, . . ., m and l2 = 0, . . ., m � m, set
ðGijÞl1;l2 ¼Qvj
�kAij
!l1;l2
; if i ¼ j;
�kðAjiÞl1;l2 ; if i 6¼ j;
8>><>>:
ðFjÞl2 ¼ ðf
jÞl2 :
Step 2. For i = 0, . . ., p � 1, l1 = 0, . . ., m and l2 = m � m + 1 . . .,m, set
ðGi�1;i�1Þl1;l2 ¼ ðCi�1Þl1;l2 ;
ðGi;i�1Þl1;l2 ¼ ðCiÞl1;l2 ;
ðFi�1
Þl2 ¼ 0;
where Ci�1 and Ci are matrices corresponding to continuity conditions.Step 3. For l1 = 0, . . ., m and l2 = 1, . . ., m, set
ðGi;p�1Þl1;m�mþl2¼
ðBil2Þl1 ; for i ¼ 0; p � 1;
0; for i ¼ 1; . . . ; p � 2;
�
ðFp�1
Þm�mþl2¼ cl2 :
By these three steps, we make the block system
y0; . . . ; y
p�1
� � G00 G10 � � � G0;p�1
G10 G11 � � � G1;p�1
..
. . .. ..
.
Gp�1;0 Gp�1;1 � � � Gp�1;p�1
0BBBB@
1CCCCA ¼ F
0; . . . ; F
p�1
� �ð3:22Þ
and solve it for the vectors
y0; . . . ; y
p�1

S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1013
by a Gaussian elimination method in which, to avoid direct inversion of diagonal blocks, we haveapplied the QR factorization, providing the possibility of taking advantage of numerical stabilityof QR method.
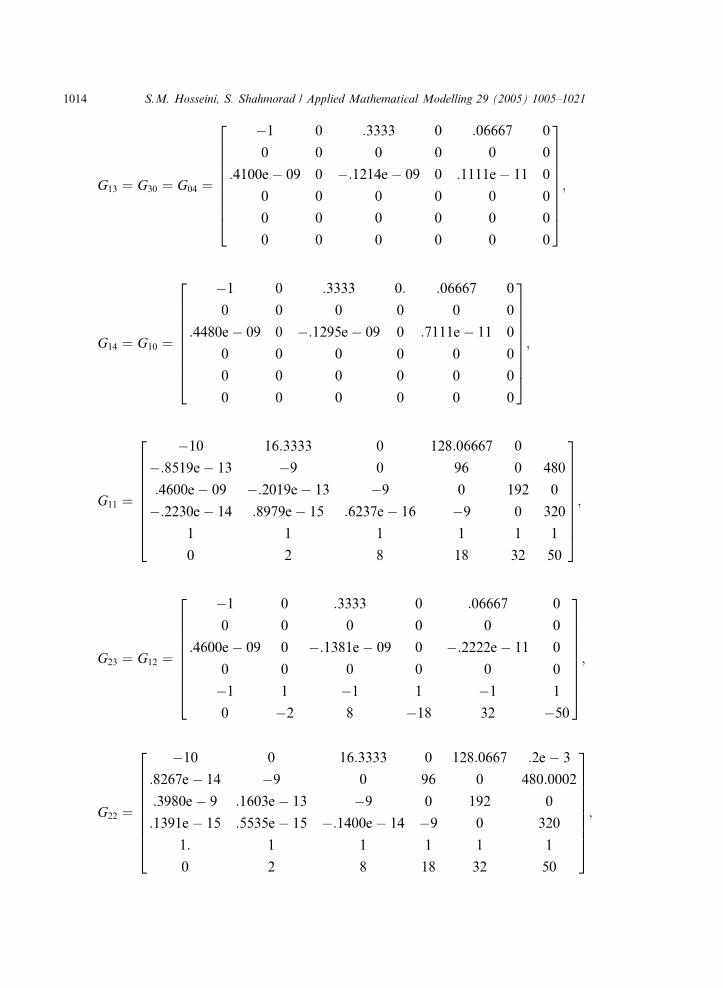
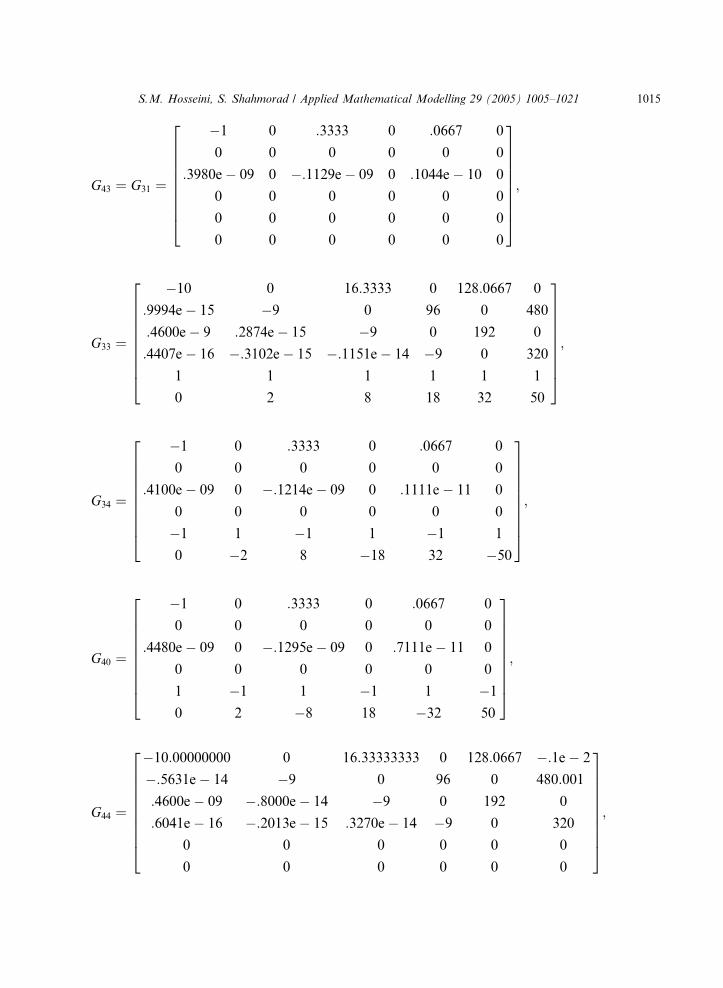
4. How to implement this piecewise method
To show the structure of final system (3.22), we give block matrices Gij and other related vectorsfor
y00ðxÞ ¼ 9yðxÞ þ e�15 � 1
3þZ 5
0
yðtÞdt; x 2 ½0; 5�
yð0Þ ¼ 1;
y0ð0Þ ¼ �3
with exact solution y(x) = e�3x for m = 5, p = 5
G00 ¼
�10 0 16:3333 0 128:0667 0
0 �9 0 96 0 480
:4600e� 9 :7674e� 14 �9 0 192 0
0 :7780e� 14 :2185e� 14 �9 0 320
1 1 1 1 1 1
0 2 8 18 32 50
2666666664
3777777775;
G01 ¼
�1 0 :3333 0 :0667 0
0 0 0 0 0 0
:3980e� 09 0 �:1129e� 09 0 :1044e� 10 0
0 0 0 0 0 0
�1 1 �1 1 �1 1
0 �2 8 �18 32 �50
2666666664
3777777775;
G03 ¼ G20 ¼ G21 ¼ G24 ¼ G32 ¼ G41 ¼ G42 ¼ G02
¼
�1 0 :3333 0 :06667 0
0 0 0 0 0 0
:4600e� 09 0 �:1381e� 09 0 �:2222e� 11 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
26666666664
37777777775;
1014 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
G13 ¼ G30 ¼ G04 ¼
�1 0 :3333 0 :06667 0
0 0 0 0 0 0
:4100e� 09 0 �:1214e� 09 0 :1111e� 11 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775;
G14 ¼ G10 ¼
�1 0 :3333 0: :06667 0
0 0 0 0 0 0
:4480e� 09 0 �:1295e� 09 0 :7111e� 11 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775;
G11 ¼
�10 16:3333 0 128:06667 0
�:8519e� 13 �9 0 96 0 480
:4600e� 09 �:2019e� 13 �9 0 192 0
�:2230e� 14 :8979e� 15 :6237e� 16 �9 0 320
1 1 1 1 1 1
0 2 8 18 32 50
2666666664
3777777775;
G23 ¼ G12 ¼
�1 0 :3333 0 :06667 0
0 0 0 0 0 0
:4600e� 09 0 �:1381e� 09 0 �:2222e� 11 0
0 0 0 0 0 0
�1 1 �1 1 �1 1
0 �2 8 �18 32 �50
2666666664
3777777775;
G22 ¼
�10 0 16:3333 0 128:0667 :2e� 3
:8267e� 14 �9 0 96 0 480:0002
:3980e� 9 :1603e� 13 �9 0 192 0
:1391e� 15 :5535e� 15 �:1400e� 14 �9 0 320
1: 1 1 1 1 1
0 2 8 18 32 50
2666666664
3777777775;
S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1015
G43 ¼ G31 ¼
�1 0 :3333 0 :0667 0
0 0 0 0 0 0
:3980e� 09 0 �:1129e� 09 0 :1044e� 10 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775;
G33 ¼
�10 0 16:3333 0 128:0667 0
:9994e� 15 �9 0 96 0 480
:4600e� 9 :2874e� 15 �9 0 192 0
:4407e� 16 �:3102e� 15 �:1151e� 14 �9 0 320
1 1 1 1 1 1
0 2 8 18 32 50
2666666664
3777777775;
G34 ¼
�1 0 :3333 0 :0667 0
0 0 0 0 0 0
:4100e� 09 0 �:1214e� 09 0 :1111e� 11 0
0 0 0 0 0 0
�1 1 �1 1 �1 1
0 �2 8 �18 32 �50
2666666664
3777777775;
G40 ¼
�1 0 :3333 0 :0667 0
0 0 0 0 0 0
:4480e� 09 0 �:1295e� 09 0 :7111e� 11 0
0 0 0 0 0 0
1 �1 1 �1 1 �1
0 2 �8 18 �32 50
2666666664
3777777775;
G44 ¼
�10:00000000 0 16:33333333 0 128:0667 �:1e� 2
�:5631e� 14 �9 0 96 0 480:001
:4600e� 09 �:8000e� 14 �9 0 192 0
:6041e� 16 �:2013e� 15 :3270e� 14 �9 0 320
0 0 0 0 0 0
0 0 0 0 0 0
2666666664
3777777775;

Table 1Maximum absolute error
m p
1 2 3 4 5
3 1.61e+00 8.79e+00 2.15e�01 6.34e�01 1.59e+005 2.1e+00 8.31e�01 1.63e�01 4.71e�02 4.40e�0210 1.56e�02 1.50e�04 3.81e�06 2.66e�07 8.26e�08
1016 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
F0¼ F
1¼ F
2¼ F
3¼ F
4¼ �:3333 0 0 0 0 0½ �:
Then the coefficient vector solutions y0,y1,y2,y3,y4, on the subintervals [0.0,1.0], [1.0,2.0], [2.0,3.0],[3.0,4.0], [4.0,5.0], respectively, are
y0¼ :3680 �:4378 :1501 �:3599e� 1 :7036e� 2 �:1012e� 2½ �;
y1¼ :1920e� 1 �:2159e� 1 :7402e� 2 �:1775e� 2 :34696e� 3 �:4992e� 4½ �;
y2¼ :1961e� 2 �:1113e� 2 :3486e� 3 �:9147e� 4 :1634e� 4 �:2572e� 5½ �;
y3¼ :3357e� 3 �:1027e� 2 �:3163e� 3 �:8445e� 4 �:1483e� 4 �:2375e� 5½ �;
y4¼ �:1546e� 1 �:1977e� 1 �:6778e� 2 �:1625e� 2 �:31770e� 3 �:4571e� 4½ �:
See Table 1 for further numerical results of this example.
5. Error estimation
When the solution is not known, the need for an error estimator presents itself as a vital com-ponent for any given algorithm. To this end, one can follow the same lines of a similar discussionin [1] and extend the method for piecewise approximation. Let us call em(x) = y(x) � ym(x) the‘‘mth-order Tau error function’’ which is to be approximated by the same method of Tau.For an integro-differential equation ID(y) = 0 with conditions B(y) = b0, the Tau problemID(ym) = Hm(x) with B(ym(x)) = b0 is associated which is defined by the same integro-differentialoperator ID; Hm(x) is a polynomial of degree m chosen for the exact solution ym(x) to be a poly-nomial of a prescribed degree. Subtracting the equations related to the Tau problem from those ofthe exact problem one obtains the Tau error problem ID(em(x)) = �Hm(x), with B(em(x)) = 0.
Like the original problem we proceed in the same manner to estimate em(x) with the Taumethod. We seek a polynomial approximation em,n(x) for n > m which provides the Tau errorestimation and is denoted by ‘‘Est.Err’’ in the following Table 6. The terms ‘‘exact’’, ‘‘Tau’’,and ‘‘Ext.Err’’ denote exact solution, Tau approximate solution, and difference between thosevalues, respectively.
S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1017
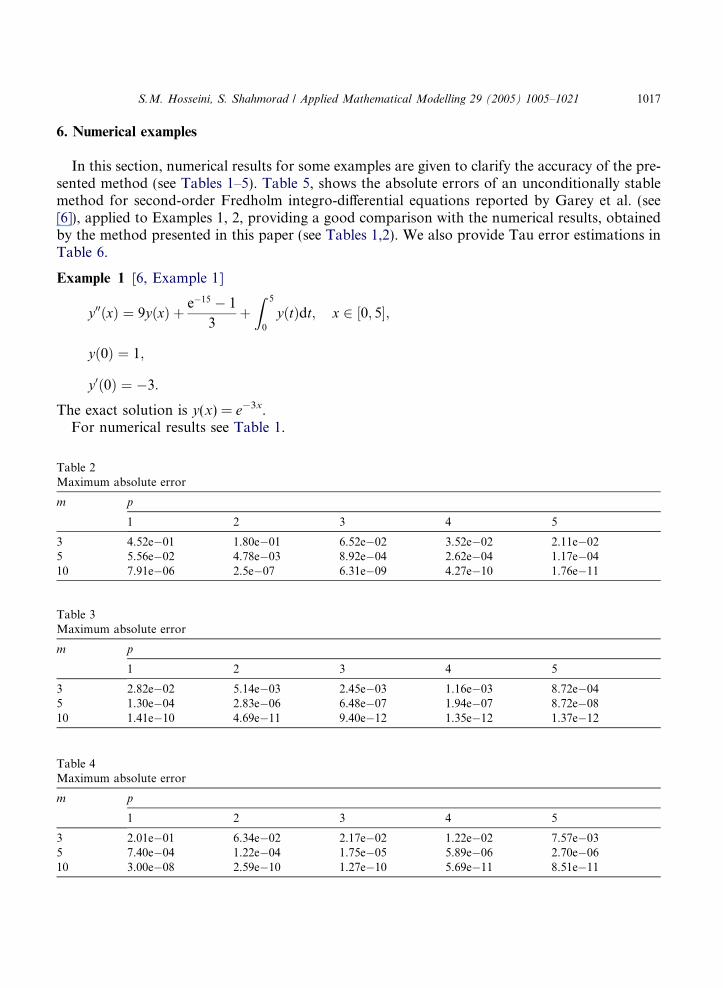
6. Numerical examples
In this section, numerical results for some examples are given to clarify the accuracy of the pre-sented method (see Tables 1–5). Table 5, shows the absolute errors of an unconditionally stablemethod for second-order Fredholm integro-differential equations reported by Garey et al. (see[6]), applied to Examples 1, 2, providing a good comparison with the numerical results, obtainedby the method presented in this paper (see Tables 1,2). We also provide Tau error estimations inTable 6.
Example 1 [6, Example 1]
TableMaxim
m
3510
TableMaxim
m
3510
TableMaxim
m
3510
y00ðxÞ ¼ 9yðxÞ þ e�15 � 1
3þZ 5
0
yðtÞdt; x 2 ½0; 5�;
yð0Þ ¼ 1;
y0ð0Þ ¼ �3:
The exact solution is y(x) = e�3x.For numerical results see Table 1.
2um absolute error
p
1 2 3 4 5
4.52e�01 1.80e�01 6.52e�02 3.52e�02 2.11e�025.56e�02 4.78e�03 8.92e�04 2.62e�04 1.17e�047.91e�06 2.5e�07 6.31e�09 4.27e�10 1.76e�11
3um absolute error
p
1 2 3 4 5
2.82e�02 5.14e�03 2.45e�03 1.16e�03 8.72e�041.30e�04 2.83e�06 6.48e�07 1.94e�07 8.72e�081.41e�10 4.69e�11 9.40e�12 1.35e�12 1.37e�12
4um absolute error
p
1 2 3 4 5
2.01e�01 6.34e�02 2.17e�02 1.22e�02 7.57e�037.40e�04 1.22e�04 1.75e�05 5.89e�06 2.70e�063.00e�08 2.59e�10 1.27e�10 5.69e�11 8.51e�11

Table 5Summary of errors (en = yn � y(xn), h = .10)
(L = 0.0) (L = 5.0)
xn yn en yn en
Example 11.0 .04917 �6.167(�4) .04981 2.274(�5)2.0 .00079 �1.679(�3) .00248 2.632(�6)3.0 �.00442 �4.540(�3) .00012 �1.955(�6)4.0 �.01239 �1.240(�2) �.00004 �4.346(�5)5.0 �.03626 �3.624(�2) �.00087 �8.740(�4)
Example 21.0 .13522 �1.086(�4) .13535 1.922(�5)2.0 .01809 �2.241(�4) .01832 �3.111(�7)3.0 .00204 �4.390(�4) .00248 �3.718(�6)4.0 �.00532 �8.672(�4) .00033 �2.863(�6)5.0 �.00174 �1.787(�3) .00004 3.346(�6)
Note. In [6] L is a nonnegative parameter and is referred to as a stabilization parameter.
1018 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
Example 2 [6, Example 2]
y 00ðxÞ ¼ 4yðxÞ þ 1
2ln
xþ e�10
xþ 1
� �þZ 5
0
yðtÞxþ e�2x
dt; x 2 ½0; 5�;
yð0Þ ¼ 1;
y 0ð0Þ ¼ �2:
The exact solution is yðxÞ ¼ e�2x.For numerical results see Table 2.
Example 3 [7, p. 136]
y 00ðxÞ ¼ yðxÞ � 4
p
Z p2
0
xtyðtÞdt; x 2 0;p2
h i;
yð0Þ ¼ 0;
y 0ð0Þ ¼ 1:
The exact solution is yðxÞ ¼ sinðxÞ.For numerical results see Table 3.
Example 4 [8, p. 361]
y 00ðxÞ ¼ yðxÞ � 4
p
Z p
0
cosðx� tÞyðtÞdt; x 2 ½0;p�;
yð0Þ ¼ 1;
y 0ðpÞ ¼ 0:

Table 6The error-estimation ‘‘Est.err’’ for Example 4, (m = 5, n = 7)
s Exact Tau Ext.err Est.err
[0.00, 0.79]0.00 1.00000000 1.00000000 2.600e�09 5.300e�140.10 0.99500417 0.99500529 1.125e�06 1.129e�060.20 0.98006658 0.98006793 1.350e�06 1.352e�060.30 0.95533649 0.95533756 1.076e�06 1.079e�060.40 0.92106099 0.92106237 1.381e�06 1.385e�060.50 0.87758256 0.87758525 2.688e�06 2.691e�060.60 0.82533561 0.82534001 4.400e�06 4.403e�060 .70 0.76484219 0.76484764 5.449e�06 5.453e�06
[0.79, 1.57]0.79 0.70710678 0.70711245 5.664e�06 5.668e�060.89 0.63298131 0.63298726 5.950e�06 5.954e�060.99 0.55253129 0.55253710 5.807e�06 5.810e�061.09 0.46656057 0.46656601 5.441e�06 5.444e�061.19 0.37592812 0.37593343 5.308e�06 5.311e�061.29 0.28153953 0.28154508 5.548e�06 5.551e�061.39 0.18433789 0.18434377 5.885e�06 5.887e�061.49 0.08529440 0.08530030 5.896e�06 5.898e�06
[1.57, 2.36]1.57 �0.00000000 0.00000561 5.612e�06 5.612e�061.67 �0.09983342 �0.09982817 5.243e�06 5.242e�061.77 �0.19866933 �0.19866418 5.152e�06 5.151e�061.87 �0.29552021 �0.29551498 5.224e�06 5.223e�061.97 �0.38941834 �0.38941331 5.035e�06 5.033e�062.07 �0.47942554 �0.47942118 4.361e�06 4.359e�062.17 �0.56464247 �0.56463906 3.411e�06 3.408e�062.27 �0.64421769 �0.64421503 2.657e�06 2.653e�06
[2.36, 3.14]2.36 �0.70710678 �0.70710451 2.274e�06 2.267e�062.46 �0.77416708 �0.77416533 1.744e�06 1.739e�062.56 �0.83349215 �0.83349012 2.036e�06 2.029e�062.66 �0.88448925 �0.88448646 2.791e�06 2.785e�062.76 �0.92664883 �0.92664587 2.951e�06 2.953e�062.86 �0.95954963 �0.95954757 2.061e�06 2.058e�062.96 �0.98286293 �0.98286223 6.990e�07 6.860e�073.06 �0.99635579 �0.99635583 3.730e�08 4.700e�08
S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1019
The exact solution is yðxÞ ¼ cosðxÞ.For numerical results see Table 4.
6.1. Examples for the Tau estimator
To clarify the efficiency and use of the Tau estimator, we consider again the test Example 4. Thenumerical results for (m = 5,n = 7) are given in Table 6. The results confirm that Ext.err andEst.err are in good agreement.

1020 S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021
Example 5. We consider a test problem in which the coefficients are not polynomial and againconfirms that the Tau method is capable of dealing with such problems without having to facevery much computational effort. Again, well agreement between exact and estimated errors isillustrated in Table 7.
TableThe e
s
[�1.0�1.�0.�0.�0.�0.�0.
[�0.5�0.�0.�0.�0.�0.0.00
[0.00,0.000.100.200.300.400.50
[0.50,0.500.600.700.800.901.00
exy 00ðxÞ þ cosðxÞy 0ðxÞ þ sinðxÞyðxÞ þZ 1
�1
eððxþ1ÞtÞyðtÞdt
¼ ðcosðxÞ þ sinðxÞ þ exÞex þ 2sinhðxþ 2Þ
xþ 2; x 2 ½�1; 1�;
yð�1Þ þ yð1Þ ¼ eþ 1=e;
yð�1Þ � y0ð�1Þ þ yð1Þ ¼ e:
The exact solution is y(x) = exp(x).
7rror-estimation ‘‘Est.err’’ for Example 5, (m = 9, n = 11)
Exact Tau Ext.err Est.err
0,�0.50]00 0.36787944 0.36787792 1.521e�06 1.748e�0690 0.40656966 0.40656806 1.604e�06 1.826e�0680 0.44932896 0.44932722 1.746e�06 1.958e�0670 0.49658530 0.49658343 1.871e�06 2.072e�0660 0.54881164 0.54880968 1.958e�06 2.148e�0650 0.60653066 0.60652865 2.008e�06 2.188e�06
0,0.00]50 0.60653066 0.60652865 2.008e�06 2.188e�0640 0.67032005 0.67031802 2.025e�06 2.193e�0630 0.74081822 0.74081621 2.012e�06 2.170e�0620 0.81873075 0.81872878 1.975e�06 2.122e�0610 0.90483742 0.90483550 1.917e�06 2.052e�06
1.00000000 0.99999816 1.839e�06 1.963e�06
0.50]1.00000000 0.99999816 1.839e�06 1.963e�061.10517092 1.10516917 1.744e�06 1.855e�061.22140276 1.22140113 1.632e�06 1.732e�061.34985881 1.34985730 1.506e�06 1.593e�061.49182470 1.49182333 1.367e�06 1.440e�061.64872127 1.64872006 1.215e�06 1.275e�06
1.00]1.64872127 1.64872006 1.215e�06 1.275e�061.82211880 1.82211775 1.047e�06 1.094e�062.01375271 2.01375186 8.493e�07 8.807e�072.22554093 2.22554037 5.562e�07 5.648e�072.45960311 2.45960315 4.018e�08 8.766e�082.71828183 2.71828335 1.522e�06 1.748e�06

S.M. Hosseini, S. Shahmorad / Applied Mathematical Modelling 29 (2005) 1005–1021 1021
7. Conclusions
The formulation of the piecewise Tau method, or segmented Tau, was given. We demonstratedthe implementation and accuracy of the method for some examples with different degrees and seg-mentations. Although in the classical Tau method one is required to use an initial approximation ofthe nonpolynomial coefficient functions appearing in the equation, this should not cause anyone tohesitate about applying the Taumethod and taking advantage of its features that have already beenintroduced through different papers during last 30 years. However, in some examples that we haveconsidered, the coefficients and the kernels are nonpolynomials which have been replaced by easilyobtained interpolating polynomials based on zeros of the Chebyshev polynomials. Comparisonswith some other well known methods have often been reported in some related articles, but herewe would particularly like to comment on the application of the classical collocation method. In[9] it has been shown that collocation approximations of any given degree can be simulated throughthe Tau method by using a special perturbation term. In doing so, the collocation method acquiresthe permanence property of the Taumethod and consequently the number of arithmetic operationsrequired to compute collocation approximations can be reduced considerably.
We finally have adapted a Tau estimator to estimate the error of approximations on each seg-ment. The results given in Tables 6 and 7 confirm the efficiency of the introduced Tau errorestimator.
References
[1] S.M. Hosseini, S. Shahmorad, Numerical solution of a class of integro-differential equations with the Tau methodwith an error estimation, Appl. Math. Comput. 136 (2003) 559–570.
[2] S.M. Hosseini, S. Shahmorad, Tau numerical solution of Fredholm integro-differential equations with arbitrarypolynomial bases, Appl. Math. Model 27 (2003) 145–154.
[3] S.M. Hosseini, S. Shahmorad, A matrix formulation of the tau for the Fredholm and Volterra linear integro-differential equations, Korean J. Comput. Appl. Math. 9 (2) (2002) 497–507.
[4] S. Shahmorad, Numerical solution of a class of integro-differential equations by the Tau method, Ph.D Thesis,Tarbiat Modarres University, Tehran, 2002.
[5] E.L. Ortiz, H. Samara, An operational approach to the Tau method for the numerical solution of nonlineardifferential equations, Computing 27 (1981) 15–25.
[6] L.E. Garey, C.J. Gladwin, R.E. Shaw, Unconditionally stable method for second-order Fredholm integro-differential equations, Appl. Math. Comput. 81 (1997) 275–286.
[7] A.M. Wazwaz, A First Course in Integral Equations, World Scientific, River Edge, NJ, 1997.[8] L.M. Delves, J.L. Mohamed, Computational Methods for Integral Equations, Cambridge University Press,
Cambridge, 1985.[9] M.K. EL-Daou, E.L. Ortiz, A recursive formulation of collocation in terms of canonical polynomials, Computing
52 (1994) 177–202.
Related Documents











