Abstract— This article proposes a new approach to stability analysis of nonlinear systems via numerical computation for the Lyapunov’s methods. The presentation includes the review of the Lyapunov’s methods, the quadratic Lyapunov function, the threshold accepting algorithms and illustrative examples, respectively. The proposed approach yields a larger stability region for a polynomial system than an existing method does. Keywords—Stability, Lyapunov’s methods, Threshold accepting algorithms, Numerical computing. I. INTRODUCTION YAPUNOV’S stability methods have been successfully applied for long years by engineers and scientists [1],[2]. The direct method of Lyapunov’s is regarded as clean and concise. Nonetheless, for some systems, finding Lyapunov function is not straightforward. Doing this manually in some cases is very time consuming, perhaps not possible. Once the Lyapunov function is obtained for the system of interest, the next practical issue becomes the region of attraction. In order to find this, some computational approaches, e.g. geometrical, numerical methods etc., have to be applied. For instance, various previous works have been proposed for the construction of Lyapunov functions based on conventional method [3],[4], numerical methods [5],[6] and artificial intelligent methods [7],[8]. It is of interest to find a general tool to assist the construction of the Lyapunov function and the stability region for a nonlinear system. Threshold accepting algorithms are appropriate candidates because of its flexibility and easy to use [9],[10]. The results are compared with the previous work [11] considering the same systems as appeared in [12],[13]. II. LYAPUNOV’S METHODS A nonlinear system can be represented by ) , ( t x f x = ɺ (1) for a non-autonomous one, and Received April 2, 2010. This work has been supported by Suranaree University of Technology and Rajamangkala University of Technology Isarn, Thailand. The authors are with the School of Electrical Engineering, Suranaree University of technology, Thailand. (*correspondence : [email protected]) ) (x f x = ɺ (2) for an autonomous system. At the equilibrium 0 = e x , the following conditions hold : 0 ) ( = e x f and 0 = e x ɺ . The Lyapunov’s indirect method : consider an autonomous system, the Jacobian at the equilibrium point can be defined as 0 ) ( = ∂ ∂ = e x x f x A (3). - If all eigenvalues of A are strictly in the left-half complex plane, then the asymptotic stability at the equilibrium point of the linearized system can be concluded. - If at least one eigenvalue of A is strictly in the right- half complex plane, then the instability of the linearized system is concluded. - If all eigenvalues of A are in the left-hand complex plane but at least one of them is on the ω j axis, then the linearized system is said to be marginally stable but one cannot conclude anything from the linear approximation. The Lyapunov’s direct method: By using the Lyapunov’s direct method, the Lyapunov function ) (x V must be found, and the stability can be concluded without knowing the solutions of the equations governing the systems. ) (x V must be scalar, positive definite and differentiable. A nonlinear system can be said to have a globally asymptotically stable equilibrium, if these exist - 0 ) ( > x V - 0 ) ( < x V ɺ - ∞ → ) (x V as ∞ → x . Consider a nonlinear mass-spring-damper system described by 0 3 1 0 = + + + x k x k x x b x m ɺ ɺ ɺ ɺ (4). Numerical Approach to Lyapunov’s Stability Analysis of Nonlinear Systems Using Threshold Accepting Algorithms Suphaphorn Panikhom, Sarawut Sujitjorn* L Latest Trends on Circuits, Systems and Signals ISSN: 1792-4324 58 ISBN: 978-960-474-208-0

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Abstract— This article proposes a new approach to stability analysis of nonlinear systems via numerical computation for the Lyapunov’s methods. The presentation includes the review of the Lyapunov’s methods, the quadratic Lyapunov function, the threshold accepting algorithms and illustrative examples, respectively. The proposed approach yields a larger stability region for a polynomial system than an existing method does.
Keywords—Stability, Lyapunov’s methods, Threshold accepting algorithms, Numerical computing.
I. INTRODUCTION
YAPUNOV’S stability methods have been successfully applied for long years by engineers and scientists [1],[2].
The direct method of Lyapunov’s is regarded as clean and concise. Nonetheless, for some systems, finding Lyapunov function is not straightforward. Doing this manually in some cases is very time consuming, perhaps not possible. Once the Lyapunov function is obtained for the system of interest, the next practical issue becomes the region of attraction. In order to find this, some computational approaches, e.g. geometrical, numerical methods etc., have to be applied. For instance, various previous works have been proposed for the construction of Lyapunov functions based on conventional method [3],[4], numerical methods [5],[6] and artificial intelligent methods [7],[8].
It is of interest to find a general tool to assist the construction of the Lyapunov function and the stability region for a nonlinear system. Threshold accepting algorithms are appropriate candidates because of its flexibility and easy to use [9],[10]. The results are compared with the previous work [11] considering the same systems as appeared in [12],[13].
II. LYAPUNOV’S METHODS
A nonlinear system can be represented by
),( txfx =ɺ (1)
for a non-autonomous one, and
Received April 2, 2010. This work has been supported by Suranaree
University of Technology and Rajamangkala University of Technology Isarn, Thailand.
The authors are with the School of Electrical Engineering, Suranaree University of technology, Thailand. (*correspondence : [email protected])
)(xfx =ɺ (2)
for an autonomous system. At the equilibrium 0=ex , the
following conditions hold : 0)( =exf and 0=exɺ .
The Lyapunov’s indirect method : consider an autonomous system, the Jacobian at the equilibrium point can be defined as
0
)(
=∂
∂=
exx
f xA (3).
- If all eigenvalues of A are strictly in the left-half
complex plane, then the asymptotic stability at the equilibrium point of the linearized system can be concluded.
- If at least one eigenvalue of A is strictly in the right-half complex plane, then the instability of the linearized system is concluded.
- If all eigenvalues of A are in the left-hand complex plane but at least one of them is on theωj axis, then the linearized system is said to be marginally stable but one cannot conclude anything from the linear approximation.
The Lyapunov’s direct method: By using the Lyapunov’s direct method, the Lyapunov
function )(xV must be found, and the stability can be
concluded without knowing the solutions of the equations governing the systems. )(xV must be scalar, positive definite
and differentiable. A nonlinear system can be said to have a globally
asymptotically stable equilibrium, if these exist
- 0)( >xV
- 0)( <xVɺ
- ∞→)(xV as ∞→x.
Consider a nonlinear mass-spring-damper system described by
03
10 =+++ xkxkxxbxm ɺɺɺɺ (4).
Numerical Approach to Lyapunov’s Stability Analysis of Nonlinear Systems
Using Threshold Accepting Algorithms
Suphaphorn Panikhom, Sarawut Sujitjorn*
L
Latest Trends on Circuits, Systems and Signals
ISSN: 1792-4324 58 ISBN: 978-960-474-208-0

The energy function is used as the Lyapunov function candidate expressed by
dxxkxkxmV
x
)(2
1)(
010
2 3∫ ++= ɺx
4
1
2
0
2
4
1
2
1
2
1xkxkxm ++= ɺ (5).
It is clearly seen that )(xV is scalar, differentiable, positive
definite and unbounded. The function )(xV is, hence, the Lyapunov function. Next,
3)()( xbxxbxV ɺɺɺɺɺ −=−=x (6)
is negative definite. Therefore, the global asymptotic stability of the system can be concluded.
According to the indirect method, the quadratic Lyapunov function can be generally applied. It can be expressed by
0)( >= Pxxx TV (7)
,whereas x is the state vector and P is a symmetrically scalar matrix. The following equations must be satisfied
PxxPxxx TT +=)(Vɺ (8)
0)( <−= Qxxx TVɺ (9)
PAPAQ T+= (10)
,and
TQQ = (11).
III. THRESHOLD ACCEPTING ALGORITHMS FOR NONLINEAR
STABILITY ANALYSIS
A. The indirect method
As reviewed earlier, the stability of any linearized systems can be concluded via the quadratic Lyapunov function. Regarding this, the matrices P and Q must exist and satisfy the Lyapunov equation. Generic threshold accepting algorithms [9],[10] have been modified to search for these matrices. Considering the second-order systems, the procedural list below accommodates the task.
Example 1 Consider the system [2]
2111 2 xxx −−=xɺ
1212 xxx −=xɺ (12)
having
−
−=
∂
∂=
= 10
02
0e
xx
fA .
The search spent 4 iterations to obtain
=
5.07892.0793-
-2.07935.9006P and
=
5.9992-1.2575
1.2575-4.1585Q .
Therefore, )(xV and )(xVɺ are of the forms
2122
22
1 12.0793-2.0793-5.0789-5.9006)( xxxxxxV =x (13)
2111.8012-14.3162-14.3162)( 212
2 xxxxxV +=xɺ (14),
whose surface plots are illustrated in Figs. 2(a) and (b), respectively, and the asymptotic stability at the origin can be concluded.
-20-10
010
20
-20-10
010
200
1000
2000
3000
4000
5000
X1
Lyapunov funct ion
X2
-20
0
20
-20-1001020-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
X1
dv
X2
(a) (b)
Fig.2 (a) The Lyapunov function )(xV , (b) the )(xVɺ of example 1.
STEP 0: Initialize solutions P and Q by zeroing all elements.
STEP 1: Generate randomly within the ranges [-10,+10] the elements of P . Determine
the positive definiteness of P . If P is not positive definite, go to STEP 1.
STEP 2: Compute Q based on P . Determine the negative definiteness of Q . If Q is not negative definite, go to STEP 1.
STEP 3: Accept solutions P and Q . Exit.
Fig.1 Threshold accepting algorithms to search for P and Q .
Latest Trends on Circuits, Systems and Signals
ISSN: 1792-4324 59 ISBN: 978-960-474-208-0

Example 2 Consider the Van der pol system
21 x−=xɺ
2
2
112 )1( xxx −+=xɺ (15)
having
−
−=
∂
∂=
= 11
10
0e
xx
fA .
By 7 iterations, the search returned
=
8.7261.001-
-1.0013.149P and
=
17.453-3.004
3.004-12.597Q . Hence,
212
22
1 .00131-8.7265-1479.2)( xxxxV =x (16)
212
212 11.8012-14.3162-14.3162)( xxxxxV =xɺ . (17).
Fig. 3 depicts the surface plots of )(xV and )(xVɺ to confirm
the asymptotic stability at the origin of the system.
-20-10
010
20
-20
-10
0
10
200
1000
2000
3000
4000
5000
6000
X1
Lyapunov function
X2
-20-10
010
20
-20
-10
0
10
20
-6000
-4000
-2000
0
2000
X1
dv
X2
(a) (b)
Fig. 3 (a) The Lyapunov function )(xV , (b) the )(xVɺ of example 2.
B. The direct method
This section has an interest in the method proposed by Xiao-Lin and You-Lin [11]. The method considers the polynomial system of the form
=
=
),(
,
yxfdt
dy
ydt
dx
(18),
where
2)()()(),( yxRyxQxPyxf ++= (19)
∑∑∑===
===N
ii
N
ii
N
ii
iii xrxRxqxQxpxP001
)(,)(,)( (20).
This section demonstrates the usefulness of the threshold accepting algorithms to seek for the suitable coefficients of the
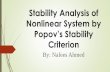
Lyapunov function candidate. Moreover, the search approach provides a larger stable region than that provided by the previous method [11]. Example 3 Consider the system
−+−=
=
yxxdt
dy
ydt
dx
3
, (21)
and the Lyapunov function candidate
2
210 )()()(),( yxQyxQxQyxV ++= (22).
Since
32
221
23
103
1
)()](2)([
)]()(2)()([])[(
yxQyxQxQ
yxQxxxQxQxxxQdt
dV
ɺɺ
ɺ
+−+
−−−+−−= (23),
let 0)(2 =xQɺ and ε−=− )(2)( 21 xQxQɺ , one can obtain
−=
=
xcxQ
cxQ
)2()(
)(
1
2
ε (24).
Hence, the Lyapunov candidate can be rewritten as
20 )2()(),( cyxycxQyxv +−+= ε (25)
, having
230
3 )2)4()(()()2( yycxxcxQxxxcdt
dVεεε −+−−+−−−= ɺ (26)
Let ∑ =
−=+−−N
i
ii xi
cxxcxQ1
21230 2
)2)4()(α
εɺ , then
∑ =
−+−−=N
i
ii xi
xc
xcxQ1
212420 22
)2
2()(αε , and
2
1
2123 )2
()()2( yyxi
xxxcdt
dV N
i
ii εα
ε −+−−−= ∑ =
− (27)
The function ),( yxV will be positive definite iff
30 αε ≤≤≤ c and 0,...,,, 12531 ≥−Nαααα . The threshold
accepting procedures for the direct method problem are declared in Fig. 4.
As a result, the dark solid line in Fig. 5 defines the stable region obtained from the search in which 47752.0=c ,
81243.03 =α , 71 10544.1 −×=α and 7101663.2 −×=ε . The dash-
dot line defines the stable region provided by the previous method.
Latest Trends on Circuits, Systems and Signals
ISSN: 1792-4324 60 ISBN: 978-960-474-208-0

Fig.5 Stable regions of example 3.
I. CONCLUSION
The paper has demonstrated the usefulness of the search method, i.e. the threshold accepting algorithms, to stability analysis of nonlinear systems. The algorithms are simple, and provide a fast computation to reach for a meaningful solution (local solution). A larger region of attraction can be obtained by the proposed approach. Ongoing research is concentrated on developing more efficient algorithms for the purposes and applications to Lyapunov-based control design optimization.
REFERENCES [1] J.J.E. Slotine and W. Li. Applied Nonlinear Control System. Prentice
Hall Inc., Englewood Cliffs. 1991.
[2] H. K. Khalil. Nonlinear Systems. New York: MacMillan, 1992.
[3] G.H.Golub, S.Nash and C.Van Loan, “A Hessenberg-Schur method for
problem AX+XB=C,” IEEE Transactions on Automatic Control, Vol.
24, No.6, pp.909-913, 1979.
[4] X. A. Wang and W. Dayawansa. “On global Lyapunov functions of
nonlinear autonomous systems”, In Proceedings of The 38th Conference
on Decision & Control, pp.1635-1639, December 1999.
[5] T.Zhaolu and G.Chuanqing, “A numerical algorithm for Lyapunov
equations,” Applied Mathematics and Computation, 202, pp.44–53,
2008.
[6] D. C. Sorensen and Y. Zhou, “Direct method for matrix Sylvester and
Lyapunov equations,” Journal of Applied Mathematics, 2, pp.277–303,
2003.
[7] B. Grosman,, and D. R. Lewin, “Lyapunov-based stability analysis
automated by genetic programming,” Automatica, 45, pp.252-256,
December 2008.
[8] C. Banks, “Searching for Lyapunov functions using genetic
programming,” , http://www.aerojockey.com/files/lyapunovgp.pdf.
[9] G. Duech and T. Scheuer, “Threshold accepting: A general purpose
optimization algorithm appearing superior to simulated annealing.
Journal of Computational Physics, 90, pp.161-175, 1990.
[10] E-G. Talbi, Metaheuristics-From Design to Implementation, Wiley,
2009.
[11] L. Xiao-Lin and J. Yao-Lin, “Numerical algorithm for constructing
Lyapunov functions of polynomial differential systems,” J Appl Math
Comput , 29, pp.247–262, 2009.
[12] J.R. Hewit and C. Storey, “Numerical application of Szego’s method for
constructing Lyapunov functions”, IEEE. Transactions on Automatic
Control, 14, pp.106–108, February 1969.
[13] C.C. Hang and J.A. Chang, “An algorithm for constructing Lyapunov
functions based on the variable gradient method,” IEEE Transactions on
Automatic Control, 15, pp. 510–512, August 1970.
STEP 0: Initialize 0...,,, 12975 =−Nαααα .
STEP 1: Generate possible coefficients randomly:
]10[, 3 ∈αε and ]1010[, 81
−×∈αc . If
30 αε ≤≤≤ c is false, then go to STEP 1.
STEP 2: If Vɺ is not negative definite, then go to STEP 1.
STEP 3: Accept solutions 3 1, , ,cε α α . Exit.
Fig. 4 Threshold accepting algorithms for the direct method.
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
x1
y 1
0.96 x12-0.036 x1
4+0.96 x1 y1+0.48 y12-1.0 = 0
COUNT = 2
c=0.47752
alpha3= 0.81243
alpha1= 1.5442e-007
e=2.1163e-007
Latest Trends on Circuits, Systems and Signals
ISSN: 1792-4324 61 ISBN: 978-960-474-208-0
Related Documents