Nonlinear Control of Variable Speed Wind Turbines With Switching Across Operating Regimes Tuhin Das ∗ Mech. Matls. & Aero. Engg. Dept. University of Central Florida Orlando, FL 32816 Email: [email protected] Greg Semrau Southwest Wind Power 1801 W Rt 66 Flagstaff AZ 86001 Sigitas Rimkus Mech. Matls. & Aero. Engg. Dept. University of Central Florida Orlando, FL 32816 Abstract One of the key control problems associated with variable speed wind turbines is maximization of energy extraction when operating below the rated wind speed and power regulation when operating above the rated wind speed. In this paper, we ap- proach these problems from a nonlinear systems perspective. For below rated wind speeds we adopt existing work appearing in the literature and provide further insight into the characteristics of the resulting equilibrium points. For above rated wind speeds, we propose a nonlinear controller and analyze the stability property of the resulting * Address all correspondence to this author. 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Nonlinear Control of Variable Speed Wind Turbines
With Switching Across Operating Regimes
Tuhin Das∗
Mech. Matls. & Aero. Engg. Dept.
University of Central Florida
Orlando, FL 32816
Email: [email protected]
Greg Semrau
Southwest Wind Power
1801 W Rt 66
Flagstaff AZ 86001
Sigitas Rimkus
Mech. Matls. & Aero. Engg. Dept.
University of Central Florida
Orlando, FL 32816
Abstract
One of the key control problems associated with variable speed wind turbines is
maximization of energy extraction when operating below the rated wind speed and
power regulation when operating above the rated wind speed. In this paper, we ap-
proach these problems from a nonlinear systems perspective. For below rated wind
speeds we adopt existing work appearing in the literature and provide further insight
into the characteristics of the resulting equilibrium points. For above rated wind speeds,
we propose a nonlinear controller and analyze the stability property of the resulting
∗Address all correspondence to this author.
1
equilibria. We propose a method for switching between the two regimes that ensures
continuity of control input at the transition point. We perform an analytical study of
the stability of the equilibria of the closed loop system under switching control. The
control laws are verified using a wind turbine model with two different wind speed
profiles.
1 Introduction
With the growing energy demand and need to decrease greenhouse gas emissions, renewable
energy systems are poised to become a large part of energy generation. One of the most
popular renewable energy systems over the past decade has been the wind turbine. Tech-
nological advances in modeling, prediction, sensing and control combined with the current
shift towards decentralized power have prompted development of wind energy systems. Al-
though initial expenditures could be an issue, the overall costs of installing and running wind
turbines are rapidly reducing with technological advances [4]. There are two different main
types of wind turbines, horizontal axis and vertical axis wind turbines [4, 9]. The focus of
this work in on horizontal axis wind turbines (HAWTs). There are two primary classifica-
tions of HAWTs, fixed speed and variable speed. The fixed speed system is easy to build and
operate but variable speed system provides greater energy extraction, up to a 20% increase
over fixed speed [4]. However, recent advances in fixed speed wind turbines augmented with
a variable ratio gearbox promises greater energy extraction [7]. The variable speed system
on the other hand requires more sophisticated controllers, which is an area of active research
[1].
From a systems perspective, energy is injected into the turbine through the torque gener-
ated at the turbine rotor due to wind velocity. Energy is extracted by drawing current from
the generator, which effectively provides a braking torque. In addition, the amount of wind
energy extracted can be modulated by varying the pitch angles of the rotor blades. The
generator torque (or current draw) and the blade pitch angle can be considered as control
2
inputs. A variable speed wind turbine operates differently in different operating regimes,
as shown in Fig.3, see [14, 11]. These operating regimes are explained in detail in the sec-
tion titled Operating Regimes. The main regimes of operation are, below rated wind speed
(regime 2, Fig.3) and above rated wind speed (regime 3, Fig.3). A significant amount of
work has been reported in the literature for regime 2 operation where maximization of the
extracted power is the main objective [3, 11, 5, 8, 10]. Typical control designs maintain the
wind turbine at a specific optimal operating point. In scenarios where this operating point
may not be exactly known or could change with time, it is adaptively identified using an
augmented parameter estimation algorithm.
Control designs proposed for regime 3 operations are relatively fewer in the literature.
In [2], the authors propose a cascaded generator torque controller. In both [1] and [17], the
authors propose multi-variable control in regime 3, employing both blade pitch and generator
torque as control inputs. Here the objective is to maintain relatively uniform generator torque
and thereby maintain uniform rotor speeds while achieving power regulation. As control
algorithms for the two regimes are considerably different, switching between controllers must
be handled carefully. There is very limited amount of work in the literature that addresses
the switching aspect. In [17], the authors propose a transition method that interpolates
between their regime 2 and 3 generator control torques, based on the current rotor speed.
In this paper, we address the control of a variable speed wind turbine from a nonlinear
systems perspective. For regime 2 operation, we do not attempt to develop a new control
algorithm. However, with the controller of [11] as a baseline algorithm, we provide further
insight into the characteristics of the equilibrium points and obtain a limiting operating
point. For regime 3 operation, we propose a simple nonlinear control and investigate the
stability of the equilibrium. As in regime 2, the proposed regime 3 controller also results in
two equilibrium points, of which one is stable and the other is unstable. We further determine
the region of attraction of the stable equilibrium points in each regime. We next propose
a method for switching between controllers based on rotor speed that ensures continuity of
3

rotor speed at the transition point. We analyze the implication of switching on the stability
of the closed loop system under the switching control. The paper is organized as follows.
First the system model is described. This is followed by a discussion on control development
where we first discuss the operating regimes and then present the control algorithms for
regimes 2 and 3. Switching between regimes is discussed next. Subsequently, an analysis
of the stability of the resulting equilibria under switching control is presented. Simulation
results are provided next and finally concluding remarks are presented.
2 System Model
The power extracted from a wind turbine is given by [9]
P =1
2ρACp(β, λ)V
3w (1)
The rotor efficiency Cp is dependent on two factors, blade pitch β, and tip speed ratio λ.
The tip speed ratio is defined as follows
λ =θ̇rRr
Vw
(2)
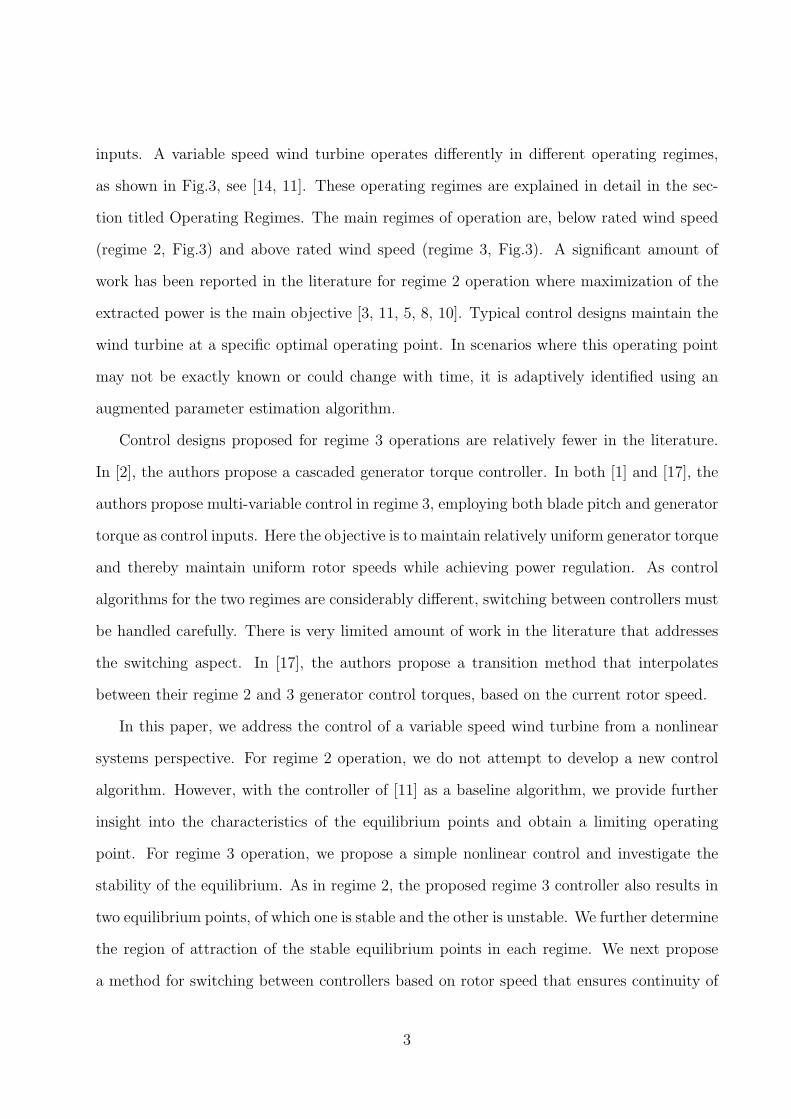
In Fig.1, a sample rotor efficiency surface is given. Fig.2 gives a schematic view of the
mechanical system. Assuming the inertia of the gear box to be negligible, we have the
following equations of motion:
Jrθ̈r +Dls
(θ̇r − θ̇gb,1
)+Kls (θr − θgb,1) +Drθ̇r = Tr
Jgθ̈g +Dhs
(θ̇g − θ̇gb,2
)+Khs (θg − θgb,2) +Dgθ̇g = −Tg
Dls
(θ̇r − θ̇gb,1
)+Kls (θr − θgb,1) = Tgb,1
Dhs
(θ̇g − θ̇gb,2
)+Khs (θg − θgb,2) = −Tgb,2
GR = Tgb,1/Tgb,2 = θ̇gb,2/θ̇gb,1 = θgb,2/θgb,1
(3)
4
02468101214161820
0
5
10
15
0
0.1
0.2
0.3
0.4
λβ (deg)
(β = 0, λopt , Cp,opt)
Figure 1: ROTOR EFFICIENCY SURFACE AS A FUNCTION OF TIP SPEED RATIOAND BLADE PITCH ANGLE
From Eq.(3), we have
Jrθ̈r = Tr − Tgb,1 −Drθ̇r, Jgθ̈g = −Tg + Tgb,2 −Dgθ̇g,
⇒[Jrθ̈r +GR Jgθ̈g
]= Tr −GR Tg −
[Drθ̇r +GR Dgθ̇g
] (4)
The electrical generator is modeled as a static power conversion device with a conversion
Tr
θr, θr
Dls , Kls
Tgb,1 θgb,1, θgb,1
Dhs , KhsTgb,2 θgb,2, θgb,2
Tg θg, θg
Dr Dg
Jr
Jg
Turbine rotor inertia
Generator
inertiaGearbox
Figure 2: DRIVE TRAIN MODEL WITH A GEAR BOX
efficiency incorporated through resistive losses, as follows:
Vg = Kvθ̇g − igRg, Tg = Kiig (5)
5
where Vg is the generator voltage, Kv is the generator emf constant, ig is the generator
current, Rg is the generator internal resistance, and Ki is the generator torque constant.
3 Control Development
3.1 Operating Regimes
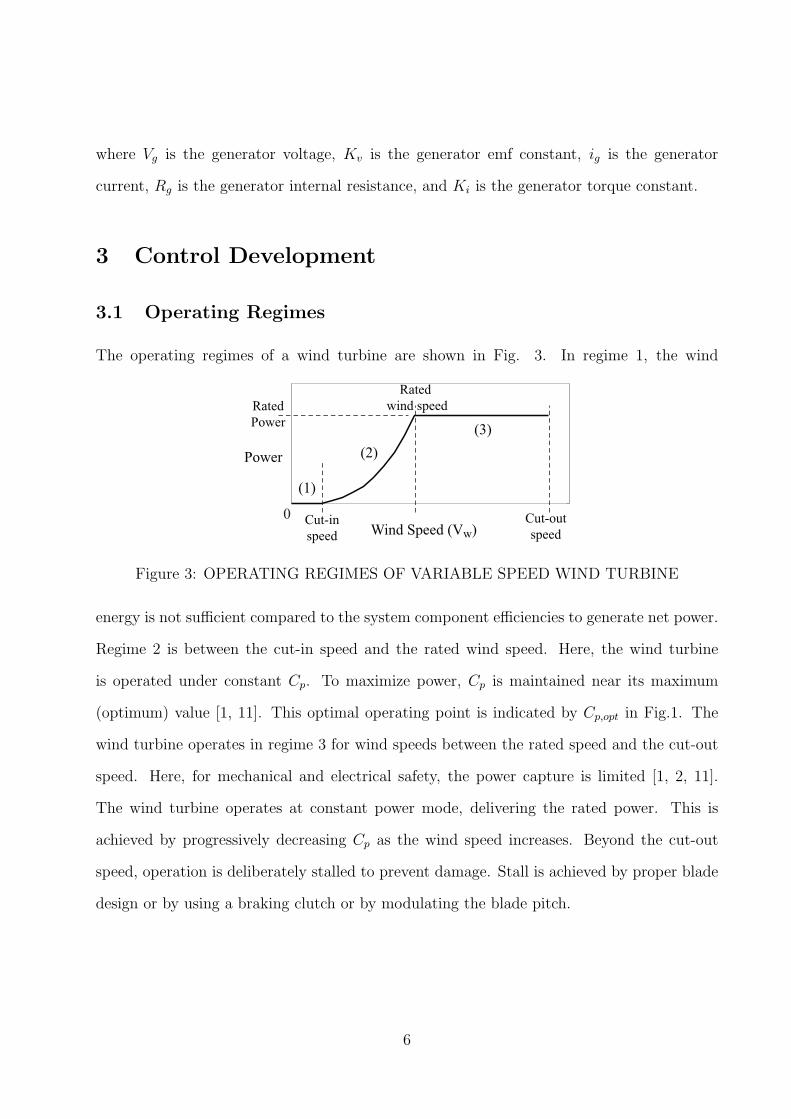
The operating regimes of a wind turbine are shown in Fig. 3. In regime 1, the wind
0Wind Speed (Vw)
Power
Rated
Power
Rated
wind speed
Cut-in
speed
Cut-out
speed
(1)
(2)
(3)
Figure 3: OPERATING REGIMES OF VARIABLE SPEED WIND TURBINE
energy is not sufficient compared to the system component efficiencies to generate net power.
Regime 2 is between the cut-in speed and the rated wind speed. Here, the wind turbine
is operated under constant Cp. To maximize power, Cp is maintained near its maximum
(optimum) value [1, 11]. This optimal operating point is indicated by Cp,opt in Fig.1. The
wind turbine operates in regime 3 for wind speeds between the rated speed and the cut-out
speed. Here, for mechanical and electrical safety, the power capture is limited [1, 2, 11].
The wind turbine operates at constant power mode, delivering the rated power. This is
achieved by progressively decreasing Cp as the wind speed increases. Beyond the cut-out
speed, operation is deliberately stalled to prevent damage. Stall is achieved by proper blade
design or by using a braking clutch or by modulating the blade pitch.
6

3.2 Below Rated Wind Speed - Regime 2
As discussed in the Introduction, control design for regime 2 is thoroughly addressed in the
literature. We do not attempt to develop a new control design for this regime. Rather, we
focus on the stability analysis of the closed loop system. First, a commonly used simplified
form of Eq.(4) is obtained by neglecting the compliance between θr and θg, which implies
from Eq.(3) and from Fig.2,
θ̇g = θ̇gb,2 = GR θ̇gb,1 = GR θ̇r, (6)
resulting in the following equation from Eq.(4),
Jeθ̈r = Tr −GR Tg −Deθ̇r, Je , Jr +GR2Jg, De , Dr +GR2Dg. (7)
Another simplification commonly appearing in literature is to neglect Deθ̇r in Eq.(7), due to
its relatively small magnitude in comparison to Tr or GR Tg. This gives
Jeθ̈r = Tr −GR Tg (8)
A standard control strategy for regime 2 operation [11] is
GR Tg = ktθ̇2r , kt > 0 (9)
For constant wind speeds, from Eqs.(1), (2), (7), and (8) it can be shown that the closed-loop
system is
λ̇ =ρAR2Vw
2Je
(Cp
λ3− 2kt
ρAR3
)λ2, (10)
The stability of the above closed-loop system is studied extensively in [11]. The authors
prove that if the curve
Cp =2kt
ρAR3λ3 (11)
7
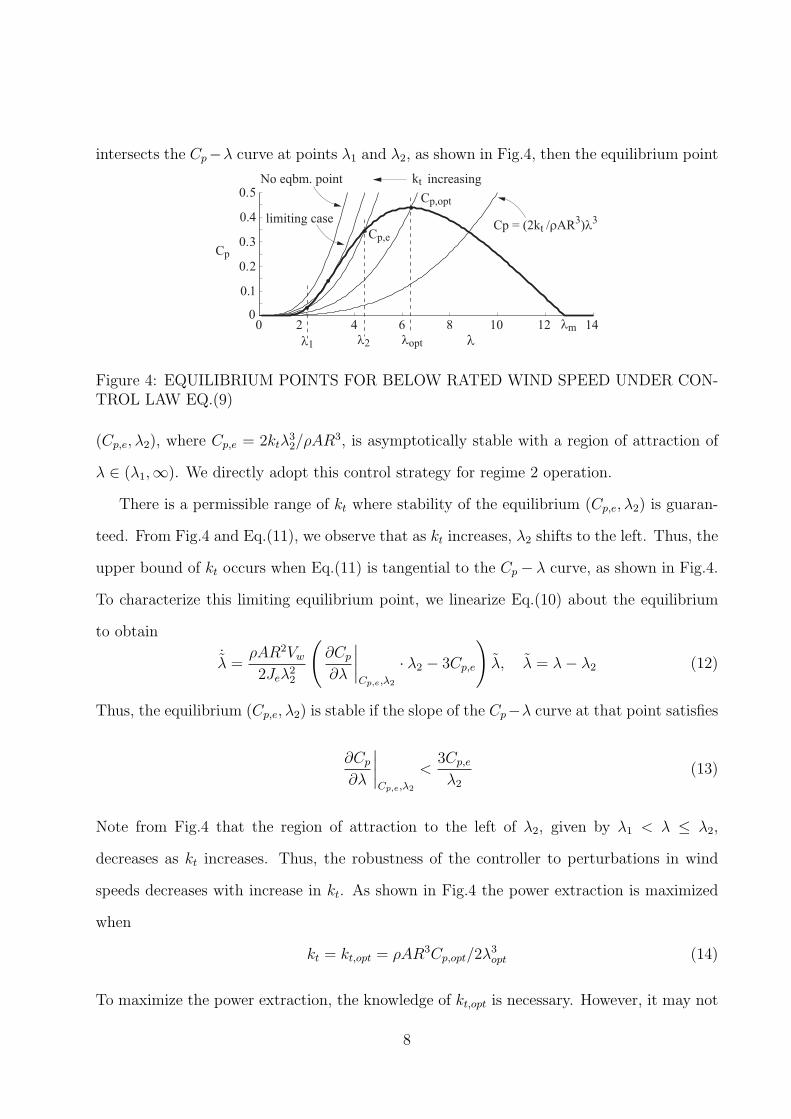
intersects the Cp−λ curve at points λ1 and λ2, as shown in Fig.4, then the equilibrium point
0 2 4 6 8 10 12 140
0.1
0.2
0.3
0.4
0.5
λ
Cp
Cp = (2kt /ρAR3)λ3
kt increasing
Cp,opt
λoptλ2λ1
Cp,e
No eqbm. point
limiting case
λm
Figure 4: EQUILIBRIUM POINTS FOR BELOW RATED WIND SPEED UNDER CON-TROL LAW EQ.(9)
(Cp,e, λ2), where Cp,e = 2ktλ32/ρAR
3, is asymptotically stable with a region of attraction of
λ ∈ (λ1,∞). We directly adopt this control strategy for regime 2 operation.
There is a permissible range of kt where stability of the equilibrium (Cp,e, λ2) is guaran-
teed. From Fig.4 and Eq.(11), we observe that as kt increases, λ2 shifts to the left. Thus, the
upper bound of kt occurs when Eq.(11) is tangential to the Cp − λ curve, as shown in Fig.4.
To characterize this limiting equilibrium point, we linearize Eq.(10) about the equilibrium
to obtain
˙̃λ =ρAR2Vw
2Jeλ22
(∂Cp
∂λ
∣∣∣∣Cp,e,λ2
· λ2 − 3Cp,e
)λ̃, λ̃ = λ− λ2 (12)
Thus, the equilibrium (Cp,e, λ2) is stable if the slope of the Cp−λ curve at that point satisfies
∂Cp
∂λ
∣∣∣∣Cp,e,λ2
<3Cp,e
λ2
(13)
Note from Fig.4 that the region of attraction to the left of λ2, given by λ1 < λ ≤ λ2,
decreases as kt increases. Thus, the robustness of the controller to perturbations in wind
speeds decreases with increase in kt. As shown in Fig.4 the power extraction is maximized
when
kt = kt,opt = ρAR3Cp,opt/2λ3opt (14)
To maximize the power extraction, the knowledge of kt,opt is necessary. However, it may not
8

be known exactly and may also change with time due to blade erosion, residue buildup etc.
Online estimation of kt,opt for power maximization has been addressed in many works such
as [11, 10, 5, 8], and is not a focus of this paper.
3.3 Above Rated Wind Speed - Regime 3
The primary control objective in regime 3 is to deliver a constant rated power, Pref . We
propose the following control law and investigate the stability of the resulting closed-loop
system obtained from Eq.(8).
Tg = Pref/θ̇rGR (15)
The resulting closed-loop equation is
Jeθ̈r = Tr − Pref/θ̇r (16)
For constant wind speed operation, as in regime 2, from Eq.(2) we have λ̇ = Rθ̈r/Vw. Since
Tr = P/θ̇r, where P is expressed in Eq.(1), we have
λ̇ =RV 2
w
Jeθ̇r
[1
2ρACp −
Pref
V 3w
](17)
For a constant Vw, the equilibrium condition is
1
2ρACp (λe) =
1
2ρACp,e =
Pref
V 3w
(18)
where λe and Cp,e represent equilibrium values. The equilibrium points are shown in Fig.5.
Note in Fig.5 that above the rated wind speed, the wind turbine operates at suboptimal
rotor efficiencies, i.e. at Cp < Cp,opt. Hence, the equilibrium condition in Eq.(18) results in
two equilibrium points (Cp,e, λ1) and (Cp,e, λ2), as indicated in Fig.5. Let λ̃ = λ− λe, where
λe could be equal to either λ1 or λ2. We next consider the dynamics of the error variable λ̃ to
9

0 2 4 6 8 10 12 140
0.1
0.2
0.3
0.4
0.5
λ
Cp
Cp,opt ( > Cp,e )
λoptλe = λ1
Cp,e
λe = λ2
Cp,e = 2Pref /ρAV3w
Unstable eqbm.
Stable eqbm.
λ~
Cp(λ2 + λ)~
λm
Figure 5: EQUILIBRIUM POINTS FOR ABOVE RATED WIND SPEED UNDER CON-TROL LAW EQ.(15)
investigate the stability property of the aforementioned equilibrium points. From Eqs.(17)
and (18), we obtain
˙̃λ =1
2ρA
RV 2w
Jeθ̇r
[Cp(λe + λ̃)− Cp(λe)
](19)
In Eq.(19), consider the term[Cp(λe + λ̃)− Cp(λe)
]. Note from Fig.5 that at the equilibrium
point (Cp,e, λ1),
[Cp(λ1 + λ̃)− Cp(λ1)
] > 0 when 0 < λ̃ < (λ2 − λ1)
< 0 when λ̃ < 0(20)
and at the equilibrium point (Cp,e, λ2),
[Cp(λ2 + λ̃)− Cp(λ2)
] < 0 when λ̃ > 0
> 0 when (λ1 − λ2) < λ̃ < 0(21)
Next, considering the following Lyapunov function candidate and its corresponding derivative
along systems trajectories,
V =1
2λ̃2, V̇ =
1
2ρA
RV 2w
Jeθ̇r
[Cp(λe + λ̃)− Cp(λe)
]λ̃ (22)
10
we observe that for the equilibrium point (Cp,e, λ1), V̇ > 0 for any λ̃ ̸= 0 satisfying λ̃ ∈
(−λ1, λ2 − λ1). Hence from Chetaev’s Theorem [13], we conclude that (Cp,e, λ1) is an unstable
equilibrium. For (Cp,e, λ2), however, V̇ < 0 for any λ̃ ̸= 0 satisfying λ̃ ∈ (λ1 − λ2,∞). Hence,
(Cp,e, λ2) is a locally asymptotically stable equilibrium point. Further, for the asymptotically
stable equilibrium point (Cp,e, λ2), from the observation above regarding V̇ and noting that
λ̃ moves monotonically toward 0 from either side, we conclude that the domain of attraction
is λ ∈ (λ1,∞). We note that the proposed design does not consider blade pitch variation for
attenuating generator torque variations. This will be an area of future research. We end this
section by noting that in regime 3, under the proposed controller, stable equilibrium points
lie on the Cp − λ curve where λm > λ2 > λopt and 0 < Cp,e < Cp,opt.
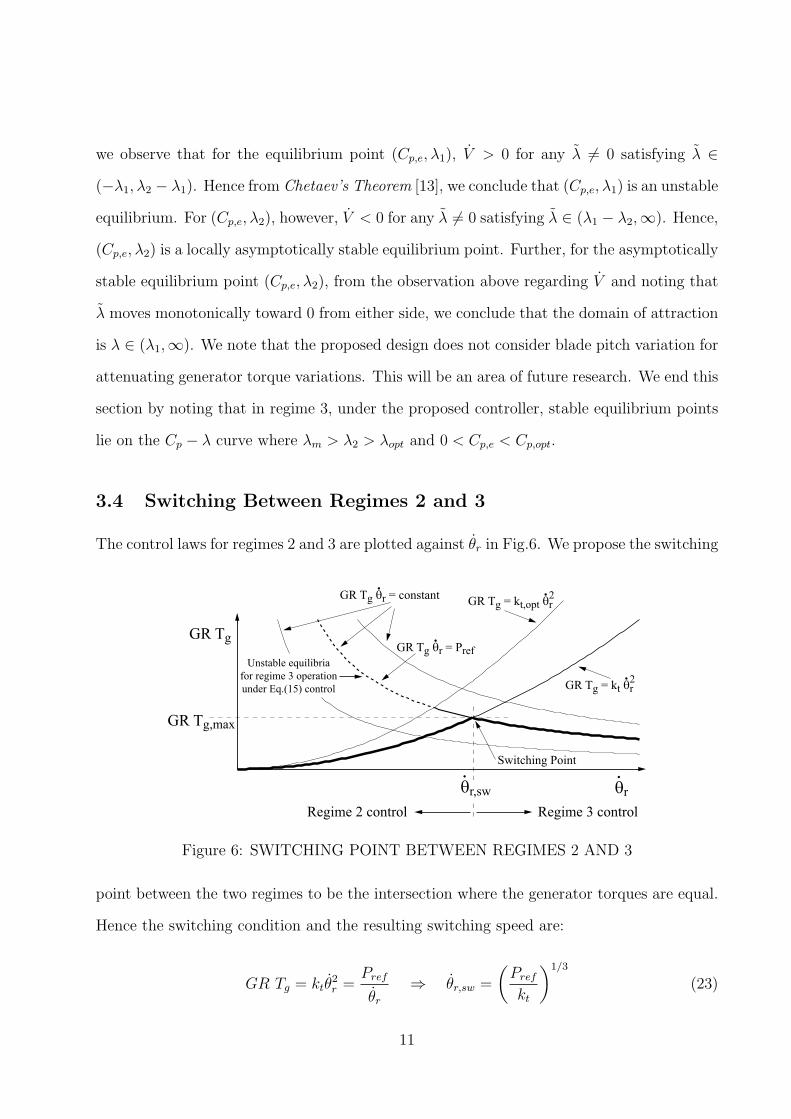
3.4 Switching Between Regimes 2 and 3
The control laws for regimes 2 and 3 are plotted against θ̇r in Fig.6. We propose the switching
θr
.
GR Tg
GR Tg θr = constant.
GR Tg = kt θr
.2
θr,sw
.
Regime 3 controlRegime 2 control
Switching Point
GR Tg,max
GR Tg θr = Pref
.
GR Tg = kt,opt θr
.2
Unstable equilibria
for regime 3 operation
under Eq.(15) control
Figure 6: SWITCHING POINT BETWEEN REGIMES 2 AND 3
point between the two regimes to be the intersection where the generator torques are equal.
Hence the switching condition and the resulting switching speed are:
GR Tg = ktθ̇2r =
Pref
θ̇r⇒ θ̇r,sw =
(Pref
kt
)1/3
(23)
11
Also, note that the control switching point corresponds to the maximum generator torque,
Tg,max. One method to determine θ̇r,sw and Pref is to use a prescribed Tg,max and a regime
2 operating point (Cp,e, λ2). Then, kt is obtained from Eq.(11) and substituting Tg,max and
kt in Eq.(23), yields
θ̇r,sw =
(GR Tg,max
kt
)1/2
⇒ Pref = ktθ̇3r,sw (24)
Alternately, knowing the rated power Pref and kt, one can determine θ̇r,sw and maximum
generator torque Tg,max using Eq.(23). Also, note that at the rated wind speed Vw,rated, the
system operates at the switching point θ̇r,sw. Therefore, from the regime 2 operating point
(Cp,e, λ2) and the rated power Pref , Vw,rated can be determined using Eq.(1) as follows
Vw,rated =
(2Pref
ρACp,e
)1/3
(25)
4 Analytical Study of the Switching Control
4.1 Common Equilibrium for Operation at Switching Point
In this section we establish that regime 2 and 3 controllers result in a common equlibrium
when the wind turbine is at equilibrium at the switching point. Here equilibrium refers to a
point on the Cp − λ curve. This is important because we wish to determine the entire set of
equilibrium points spanned by the wind turbine in regimes 2 and 3. This, in turn, will lead
to a common region of attraction for the proposed switching controller.
We first note that when the closed-loop system is at equilibrium at the switching point,
then the equilibrium rotor speed is θ̇r,sw, given by Eq.(23). Substituting for Pref from Eq.(23)
into the equilibrium condition for regime 3 in Eq.(18), we obtain
Cp,e =2kt
ρAR3λ3e (26)
12
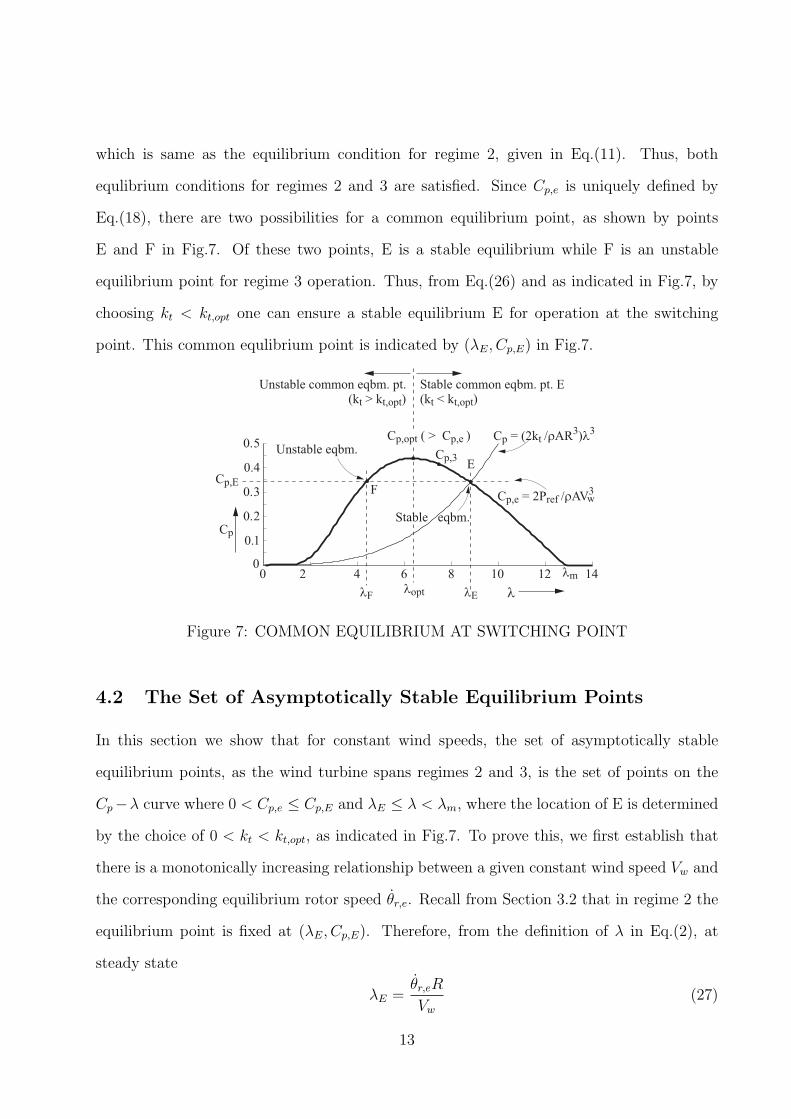
which is same as the equilibrium condition for regime 2, given in Eq.(11). Thus, both
equlibrium conditions for regimes 2 and 3 are satisfied. Since Cp,e is uniquely defined by
Eq.(18), there are two possibilities for a common equilibrium point, as shown by points
E and F in Fig.7. Of these two points, E is a stable equilibrium while F is an unstable
equilibrium point for regime 3 operation. Thus, from Eq.(26) and as indicated in Fig.7, by
choosing kt < kt,opt one can ensure a stable equilibrium E for operation at the switching
point. This common equlibrium point is indicated by (λE, Cp,E) in Fig.7.
0 2 4 6 8 10 12 140
0.1
0.2
0.3
0.4
0.5
λ
Cp
Cp = (2kt /ρAR3)λ3
λopt
Cp,opt ( > Cp,e )
Cp,E
λE
Cp,e = 2Pref /ρAV3w
Unstable eqbm.
Stable eqbm.
Stable common eqbm. pt. EUnstable common eqbm. pt.(kt < kt,opt)(kt > kt,opt)
E
F
Cp,3
λF
λm
Figure 7: COMMON EQUILIBRIUM AT SWITCHING POINT
4.2 The Set of Asymptotically Stable Equilibrium Points
In this section we show that for constant wind speeds, the set of asymptotically stable
equilibrium points, as the wind turbine spans regimes 2 and 3, is the set of points on the
Cp−λ curve where 0 < Cp,e ≤ Cp,E and λE ≤ λ < λm, where the location of E is determined
by the choice of 0 < kt < kt,opt, as indicated in Fig.7. To prove this, we first establish that
there is a monotonically increasing relationship between a given constant wind speed Vw and
the corresponding equilibrium rotor speed θ̇r,e. Recall from Section 3.2 that in regime 2 the
equilibrium point is fixed at (λE, Cp,E). Therefore, from the definition of λ in Eq.(2), at
steady state
λE =θ̇r,eR
Vw
(27)
13
Thus, from Eq.(27) we conclude that there is a monotonically increasing relationship between
Vw and θ̇r,e at steady state in regime 2. In regime 3, the equilibrium condition is given by
Eq.(18). Here, if Vw increases, Cp,e must decrease. Referring to Fig.5, we see that for stable
equilibrium points if Cp,e decreases, λe must increase and therefore θ̇r,e increases. Therefore,
there is a monotonically increasing relationship between the steady-state values of Vw and
θ̇r,e in regime 3 as well.
In Section 4.1, we have shown that regime 2 and 3 share a common stable equilibrium
(point E in Fig.7) at the point of switching. At the switching point, there exists a unique
θ̇r,e = θ̇r,sw, given by Eq.(23) or Eq.(24), and therefore a unique Vw = Vw,sw = θ̇r,swR/λE.
It can be verified using Eq.(25) that Vw,sw = Vw,rated. Therefore, we conclude from the
deductions above that for any constant Vw, there is a unique equilibrium rotor speed θ̇r,e.
Now consider the monotonically increasing behavior of Vw and θ̇r,e described above and
let there be a valid equilibrium point Cp,3 such that Cp,3 > Cp,E as shown in Fig.7. Since
regime 2 has a fixed operating point (λE, Cp,E), the operating point Cp,3 must be a regime
3 operating point. However, for regime 3 operation, Cp,3 > Cp,E implies Vw,3 < Vw,sw
according to Eq.(18), which in turn implies θ̇r,3 < θ̇r,sw from the monotonically increasing
nature of θ̇r,e with respect to Vw. This implies from Fig.6 that the equilibrium (λ3, Cp,3)
lies in regime 2, which is a contradiction. Therefore, any equilibrium point Cp,3 > Cp,E
is invalid. Furthermore, we have already shown in section 3.3 that any equilibrium point
λ ≤ λopt would be an unstable equilibrium in regime 3 operation. This proves the claim
made in this section.
4.3 Common Region of Attraction
In Section 4.2 we have established a set of asymptotically stable equilibrium points 0 <
Cp,e ≤ Cp,E spanning the operation of regimes 2 and 3. In regime 2, the region of attraction
is (λ1,∞), as indicated in Fig.4. This is a fixed region of attraction since the equilibrium
point is static at (Cp,e, λ2) = (Cp,E, λE). In regime 3, the equilibrium point is dependent on
14
wind speed Vw and for a given constant Vw, the region of attraction is (λ1,∞) as indicated in
Fig.5. Since, we have developed our analysis for constant Vw, this automatically motivates
the question of stability of the closed loop system for step changes in Vw. Step changes in
Vw can be considered as idealized wind gusts with disconitnuous increase or decrease of wind
speeds. They cause jumps in the instantaneous value of λ, and that could potentially cause
instability. They could also trigger transition between regimes and discontinuous jumps in
the equilibrium point. Hence, the stability properties of the proposed switched control would
be interesting to investigate for idealzed wind gusts. To this end, we propose and prove the
following theorem:
Theorem 1. For any step change in Vw, the set of asymptotically stable equilibrium points
on the Cp − λ curve, given by 0 < Cp ≤ Cp,E and λE ≤ λ < λm, have a common region of
attraction λF < λ < ∞ under the control laws for regimes 2 and 3, given in sections 3.2 and
3.3, and the switching criterion given in section 3.4.
Proof. As we have shown in Section 3.2 and Fig.4, the region of attraction in regime 2
is R1 = (λ1,∞). Similarly, we have shown in Section 3.3 and Fig.5 that the region of
attraction of an equilibrium (Cp,e, λ2) in regime 3 is (λ1,∞). Therefore, for a chosen regime
2 operating point E, the intersection of the regions of attraction of the set of all asymtotically
stable equilibrium points is Rc = (λF ,∞). Notably, Rc also represents a common region of
attraction of the switched system under step canges in Vw for any equilibrium point (Cp,e, λe)
satisfying 0 < Cp ≤ Cp,E and λE ≤ λ < λm. This is because λ increases monotonically when
λF < λ < λe and decreases monotonically when λ > λe in both regimes 2 and 3. Thus, from
this observation we can say that the common region of attraction Rc is (λF ,∞). We end the
proof by noting that this represents a conservative estimate of the region of attraction.
4.4 Predicting Instability Induced by Wind Gusts
In this section we explore the possibility of instability induced by indealized wind gusts
while the wind turbine operates in regimes 2 or 3. To predict instability conservatively, our
15

approach is to predict the magnitude of wind gusts that can drive λ outside (λF ,∞). It
is evident that this is only possible through step up in Vw and not through step down in
Vw. Suppose that the wind turbine is operating at steady state at the stable equilibrium
point with a wind speed of Vw,i and a tip speed ratio of λi. Let us assume a ideal wind gust
∆Vw which instantaneously increases the wind speed to Vw,f = Vw,i +∆Vw. Consequently, λ
incurs an instantaneous change to λf . Thus,
λi =θ̇RR
Vw,i
λf =θ̇RR
Vw,f
(28)
Since the system was at equilibrium just prior to the wind gust, and due to the large inertia
associated with θ̇R, θ̇R remains unchanged at the instant of the wind gust. Conservatively,
instability is induced if λf ≤ λF . Thus ∆Vw that can cause instability is
∆Vw = Vw,f − Vw,i >
(λi
λF
− 1
)Vw,i (29)
This estimate is conservative because in regime 2, the region of attraction is much larger
than (λF ,∞) and in regime 3, the minimum region of attraction is (λF ,∞) corresponding
to operation at Vw,sw and it increase as Vw increases.
5 Simulations
The control strategies developed above were tested using the wind turbine model outlined in
Eqs.(3) and (5). The main parameters and their values used for simulation are given below
Jr = 4915797.5 Jg = 81.2 GR = 70
Dr = 1000 Dg = 0.02 R = 35
Kv = 10 Ki = 10 Rg = 0.075
(30)
16

The parameter values for Jr, Jg, GR and R were obtained from [15] for a 1.5MW wind
turbine. The rest were estimated. In particular, the parameters Kv and Ki were chosen to
approximately obtain the rated current and voltages reported in [15]. The parameter Rg was
chosen to yield a generator efficiency of ≈ 95 − 98% at the rated power [9]. The Cp(β, λ)
surface was modeled as the following function
Cp (β, λ) = 0.22(
116λi
− 0.4β − 5)e− 12.5
λi
1λi
= 1λ+0.08β
− 0.035β3+1
(31)
The surface represented by Eq.(31) is plotted in Fig.1. The calculation of Cp requires blade
element theory and Eq.(31) is an approximate analytical solution [6, 16]. The control laws
designed in this paper do not assume knowledge of the surface.
In designing the control switching point θ̇r,sw, we consider the pitch angle to be fixed at
β = 0. Note that for the chosen system, Cp,opt = 0.43821 and λopt = 6.325. Thus, from
Eq.(14), we have kt,opt = 1.7502× 105. The value of kt is chosen as kt = 1.5× 105 for simula-
tions, which will lead to suboptimal power extraction in regime 2. For power maximization,
one of the existing methods for estimating kt,opt, such as [11], could be augmented to the
basic control in Eq.(9). Thus, from Eq.(23)
Pref = 1.5× 106 W, kt = 1.5× 105 ⇒ θ̇r,sw = 2.1544 rad/s (32)
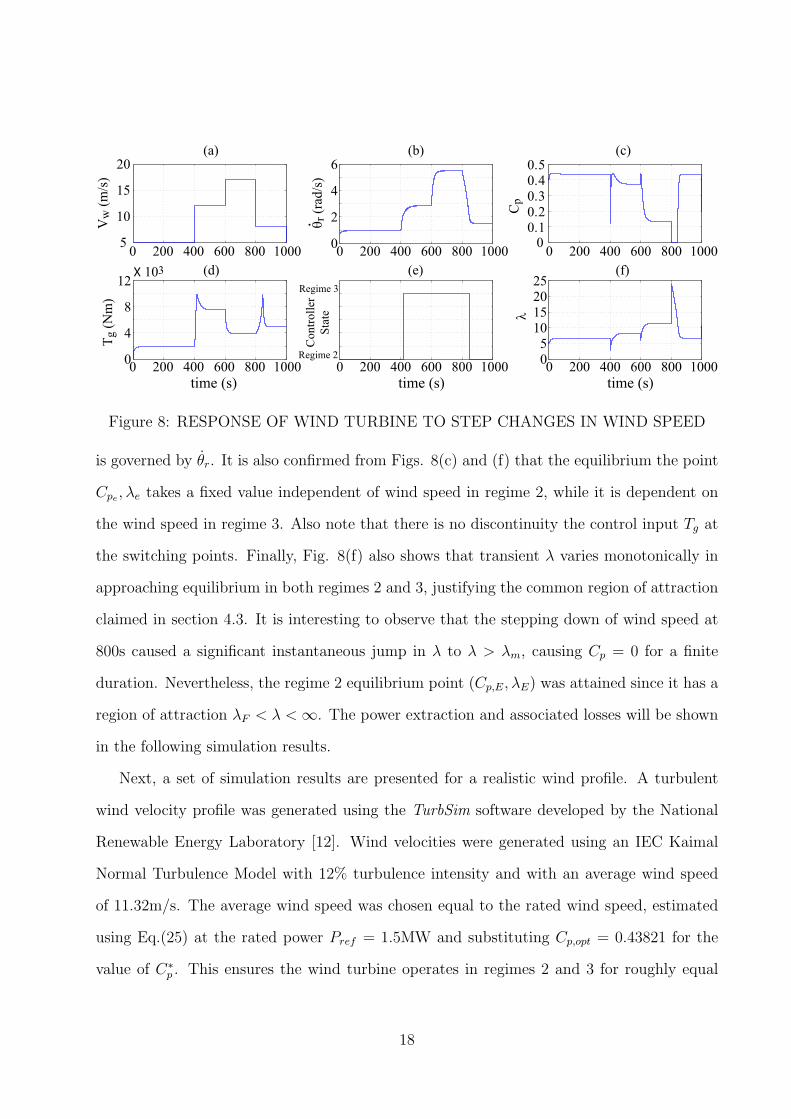
The first set of simulation results are given in Fig. 8. Here, a stepped wind speed profile
is used, as shown in Fig. 8(a). The rotor speed is plotted in Fig. 8(b) and the generator
torque, which is the control input, is plotted in Fig. 8(d). Fig. 8(e) depicts the change in
the controller state and Figs. 8(c) and (f) illustrate the variation of Cp and λ respectively.
It is noted that the wind speed was stepped up from 5m/s to 12m/s at t = 400s, and was
stepped down from 17m/s to 8m/s at t = 800s but the control switching was delayed in both
cases as evident from Fig. 8(e). This is expected, as in our proposed algorithm the switching
17
0 200 400 600 800 10005
10
15
20
00.10.20.30.40.5
0
4
8
12
05
10152025
0
2
4
6
0 200 400 600 800 1000 0 200 400 600 800 1000
0 200 400 600 800 1000 0 200 400 600 800 1000 0 200 400 600 800 1000
time (s) time (s) time (s)
X 103
Co
ntr
oll
er
Sta
te
Cp
λ
Regime 3
Regime 2
Tg
(N
m)
Vw
(m
/s)
θr
(rad
/s)
.
(a) (b) (c)
(d) (e) (f)
Figure 8: RESPONSE OF WIND TURBINE TO STEP CHANGES IN WIND SPEED
is governed by θ̇r. It is also confirmed from Figs. 8(c) and (f) that the equilibrium the point
Cpe , λe takes a fixed value independent of wind speed in regime 2, while it is dependent on
the wind speed in regime 3. Also note that there is no discontinuity the control input Tg at
the switching points. Finally, Fig. 8(f) also shows that transient λ varies monotonically in
approaching equilibrium in both regimes 2 and 3, justifying the common region of attraction
claimed in section 4.3. It is interesting to observe that the stepping down of wind speed at
800s caused a significant instantaneous jump in λ to λ > λm, causing Cp = 0 for a finite
duration. Nevertheless, the regime 2 equilibrium point (Cp,E, λE) was attained since it has a
region of attraction λF < λ < ∞. The power extraction and associated losses will be shown
in the following simulation results.
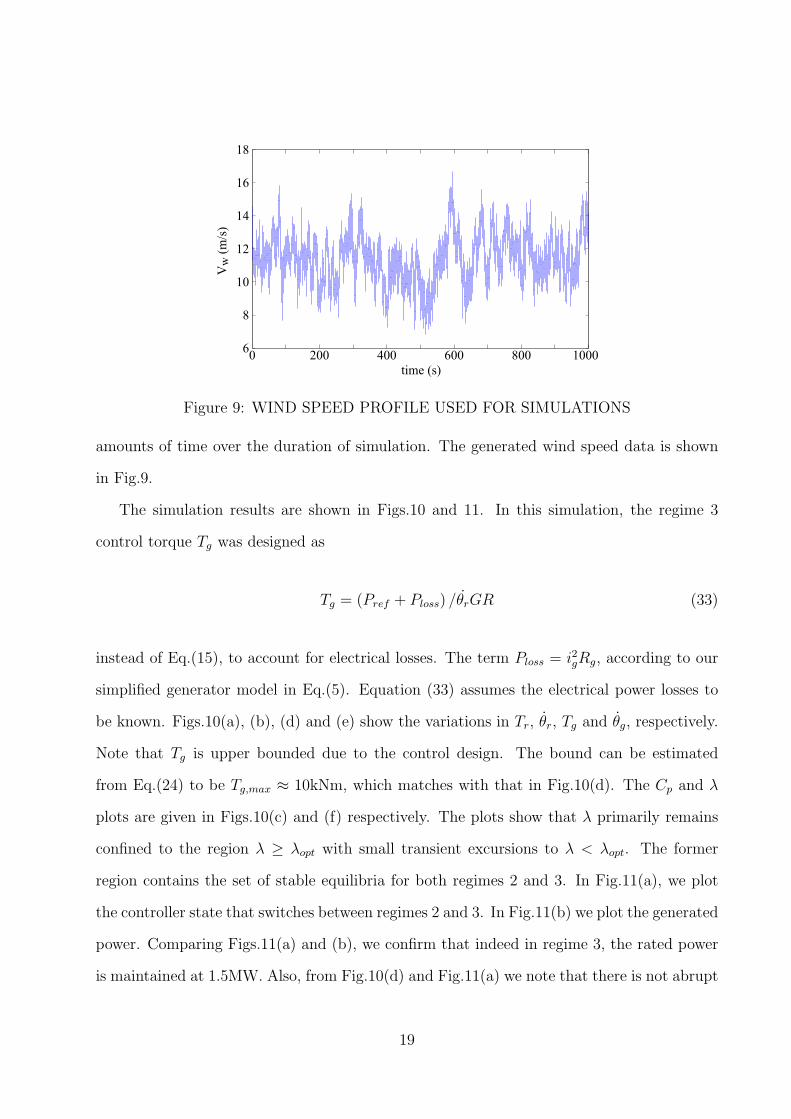
Next, a set of simulation results are presented for a realistic wind profile. A turbulent
wind velocity profile was generated using the TurbSim software developed by the National
Renewable Energy Laboratory [12]. Wind velocities were generated using an IEC Kaimal
Normal Turbulence Model with 12% turbulence intensity and with an average wind speed
of 11.32m/s. The average wind speed was chosen equal to the rated wind speed, estimated
using Eq.(25) at the rated power Pref = 1.5MW and substituting Cp,opt = 0.43821 for the
value of C∗p . This ensures the wind turbine operates in regimes 2 and 3 for roughly equal
18
0 200 400 600 800 10006
8
10
12
14
16
18
time (s)
Vw
(m
/s)
Figure 9: WIND SPEED PROFILE USED FOR SIMULATIONS
amounts of time over the duration of simulation. The generated wind speed data is shown
in Fig.9.
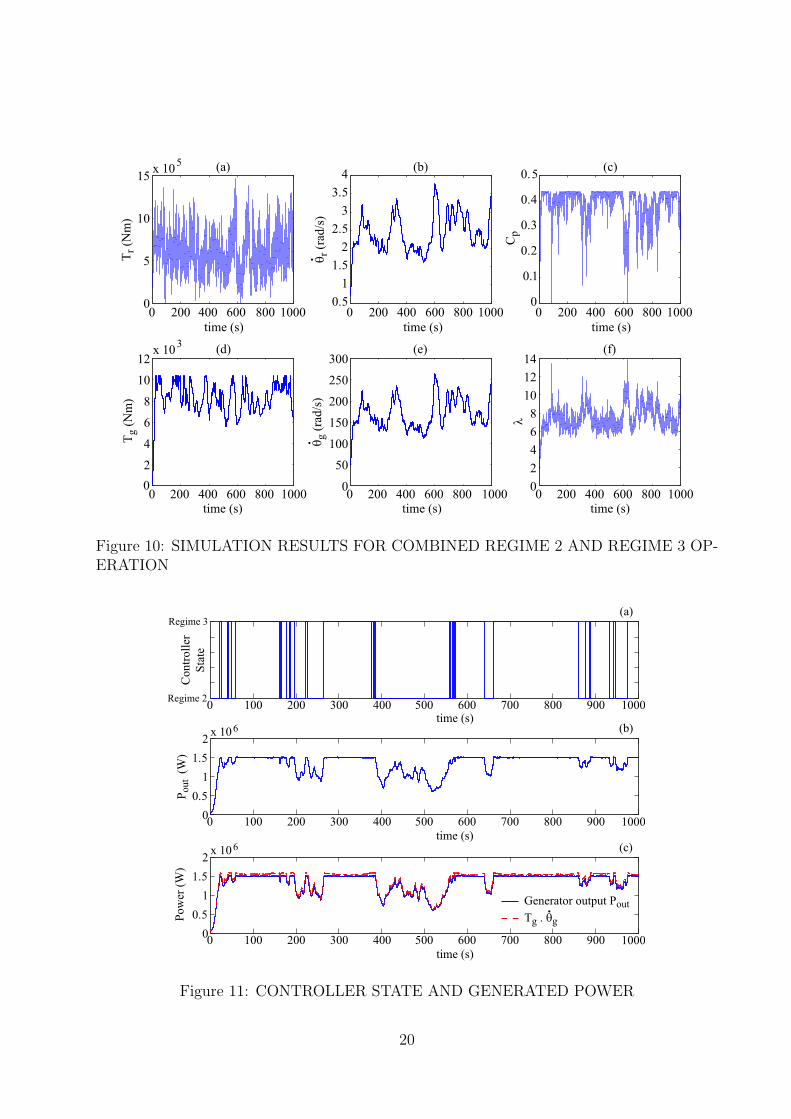
The simulation results are shown in Figs.10 and 11. In this simulation, the regime 3
control torque Tg was designed as
Tg = (Pref + Ploss) /θ̇rGR (33)
instead of Eq.(15), to account for electrical losses. The term Ploss = i2gRg, according to our
simplified generator model in Eq.(5). Equation (33) assumes the electrical power losses to
be known. Figs.10(a), (b), (d) and (e) show the variations in Tr, θ̇r, Tg and θ̇g, respectively.
Note that Tg is upper bounded due to the control design. The bound can be estimated
from Eq.(24) to be Tg,max ≈ 10kNm, which matches with that in Fig.10(d). The Cp and λ
plots are given in Figs.10(c) and (f) respectively. The plots show that λ primarily remains
confined to the region λ ≥ λopt with small transient excursions to λ < λopt. The former
region contains the set of stable equilibria for both regimes 2 and 3. In Fig.11(a), we plot
the controller state that switches between regimes 2 and 3. In Fig.11(b) we plot the generated
power. Comparing Figs.11(a) and (b), we confirm that indeed in regime 3, the rated power
is maintained at 1.5MW. Also, from Fig.10(d) and Fig.11(a) we note that there is not abrupt
19
0 200 400 600 800 10000
5
10
15x 10
5
0 200 400 600 800 10000.5
1
1.5
2
2.5
3
3.5
4
0 200 400 600 800 10000
0.1
0.2
0.3
0.4
0.5
0 200 400 600 800 10000
2
4
6
8
10
12
0 200 400 600 800 10000
50
100
150
200
250
300
0 200 400 600 800 10000
2
4
6
8
10
12
14x 10
3
time (s) time (s) time (s)
(a) (b) (c)
(d) (e) (f)
time (s) time (s) time (s)
Tr
(Nm
)T
g (
Nm
)
θr
(rad
/s)
.θ
g (
rad/s
).
Cp
λ
Figure 10: SIMULATION RESULTS FOR COMBINED REGIME 2 AND REGIME 3 OP-ERATION
0 100 200 300 400 500 600 700 800 900 1000
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2x 106
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2x 106
Po
ut (
W)
Contr
oll
er
Sta
te
Regime 3
Regime 2
Pow
er (
W)
Generator output Pout
Tg . θg
time (s)
time (s)
time (s)
(a)
(c)
(b)
.
Figure 11: CONTROLLER STATE AND GENERATED POWER
20
switching of the control input Tg at switching points, as ensured by the control design. In
Fig.11(c) we compare the generated power with the mechanical power extracted Tgθ̇g. The
difference is due to the generator losses and can be verified to be around 3− 5%.
0 200 400 600 800 10000
2
4
6
8
10
12
14
16x 10
5
time (s)
Pow
er (
W)
With compensation for loss
Without compensation for loss
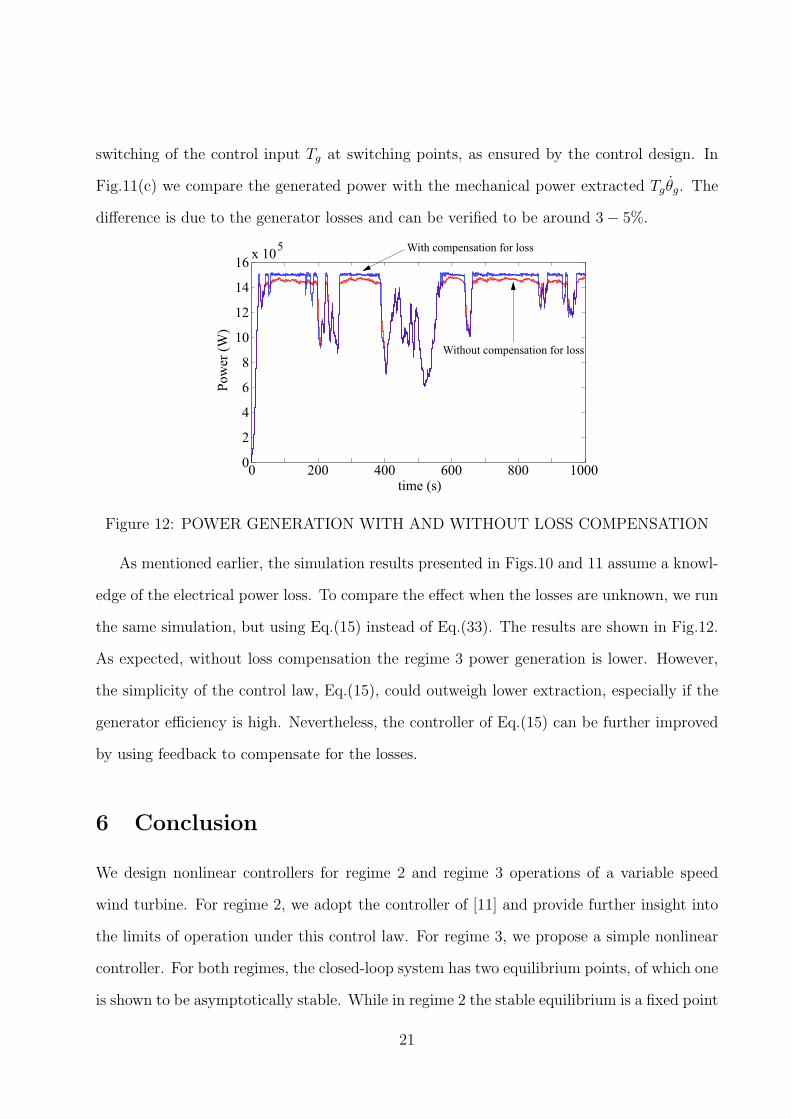
Figure 12: POWER GENERATION WITH AND WITHOUT LOSS COMPENSATION
As mentioned earlier, the simulation results presented in Figs.10 and 11 assume a knowl-
edge of the electrical power loss. To compare the effect when the losses are unknown, we run
the same simulation, but using Eq.(15) instead of Eq.(33). The results are shown in Fig.12.
As expected, without loss compensation the regime 3 power generation is lower. However,
the simplicity of the control law, Eq.(15), could outweigh lower extraction, especially if the
generator efficiency is high. Nevertheless, the controller of Eq.(15) can be further improved
by using feedback to compensate for the losses.
6 Conclusion
We design nonlinear controllers for regime 2 and regime 3 operations of a variable speed
wind turbine. For regime 2, we adopt the controller of [11] and provide further insight into
the limits of operation under this control law. For regime 3, we propose a simple nonlinear
controller. For both regimes, the closed-loop system has two equilibrium points, of which one
is shown to be asymptotically stable. While in regime 2 the stable equilibrium is a fixed point
21
on the (Cp, λ) curve, in regime 3 its location changes with wind speed. Switching between the
two regimes is based on the rotor speed whose measurement is assumed available. The control
input maintains continuity at the switching point. An analytical study of the switching
control yields a common region of attraction of the set of stable equilibrium points under step
changes in wind speeds. The controllers and the switching mechanism are validated through
simulations. The work presented in this paper can be further improved by incorporating
blade pitch modulation in regime 3 to reduce transients in generator torques. This feature
can potentially be augmented to the proposed regime 3 controller.
References
[1] B. Boukhezzar, L. Lupu, H. Siguerdidjane, and M. Hand. Multivariable control strategy
for variable speed, variable pitch wind turbines. Renewable, 32:1273–1287, 2007.
[2] B. Boukhezzar and H. Siguerdidjane. Nonlinear control of variable speed wind turbines
for power regulation. Proceedings of the IEEE Conference on Control Applications,
pages 114–119, Toronto, Canada, August 2005.
[3] B. Boukhezzar, H. Siguerdidjane, and M. Hand. Nonlinear control of variable-speed
wind turbines for generator torque limiting and power optimization. ASME Journal of
Solar Energy Engineering, 128:516–530, 2006.
[4] T. Burton, D. Sharpe, N. Jenkins, and E. Bossanyi. Wind Energy Handbook. Wiley, 1st
edition, 2001.
[5] J. Creaby, Y. Li, and J. E. Seem. Maximizing wind turbine energy capture using multi-
variable extremum seeking control. Wind Engineering, 33(4):361–387, June, 2009.
[6] F. Gao, D. Xu, and Y. Lv. Pitch-control for large-scale wind turbines based on feed
forward fuzzy-PI. Proceedings of the 7th World Congress on Intelligent Control and
Automation, June 25-27, Chongqing, China, pages 2277–2282, 2008.
22
[7] J. F. Hall, C. A. Mecklenborg, D. Chen, and S. B. Pratap. Wind energy conversion with
a variable-ratio gearbox: design and analysis. Renewable Energy, 36:1075–1080, 2011.
[8] T. Hawkins, W. N. White, G. Hu, and F. D. Sahneh. Wind turbine power capture control
with robust estimation. Proceedings of ASME 2010 Dynamic Systems and Control
Conference, September 12-15, 2010.
[9] B. K. Hodge. Alternative Energy Systems and Applications. John Wiley & Sons, Inc.,
2009.
[10] E. Iyasere, M. Salah, D. Dawson, and J. Wagner. Nonlinear robust control to maximize
energy capture in a variable speed wind turbine. American Control Conference, Seattle,
Washington, pages 1824–1829, June 11-13, 2008.
[11] K. E. Johnson, L. Y. Pao, M. J. Ballas, and L. J. Fingersh. Control of variable-speed
wind turbines. IEEE Control Systems Magazine, pages 70–81, June, 2006.
[12] N. Kelley and B. Jonkman. NWTC design codes.
http://wind.nrel.gov/designcodes/preprocessors/turbsim/, 2011.
[13] H. Khalil. Nonlinear Systems. Prentice-Hall, Inc. Upper Saddle River, NJ, 3 edition,
2002.
[14] W. E. Leithead and B. Connor. Control of variable speed wind turbines: Design task.
International Journal of Control, 73(13):1189–1212, 2000.
[15] S. Santoso and H. T. Le. Fundamental time-domain wind turbine models for wind power
studies. Renewable Energy, 32:2436–2452, 2007.
[16] J. G. Slootweg, H. Polinder, and W. L. Kling. Dynamic modeling of a winf turbine with
doubly fed induction generator. IEEE Power Engineering Society Summer Meeting,
1:644–649, 2001.
23

[17] A. D. Wright, L. J. Fingersh, and M. J. Ballas. Testing state-space controls for the con-
trols advanced research turbine. ASME Journal of Solar Energy Engineering, 128:506–
515, November, 2006.
24
Related Documents











