NON-PLANAR LIFTING-LINE THEORY FOR FIXED AND DEFORMABLE GEOMETRIES A Thesis by Aaron Douglas Kuenn Bachelor of Arts, Bethany College, 2009 Submitted to the Department of Aerospace Engineering and the faculty of the Graduate School of Wichita State University in partial fulfillment of the requirements for the degree of Master of Science August 2013

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

NON-PLANAR LIFTING-LINE THEORY FOR FIXED AND DEFORMABLE GEOMETRIES
A Thesis by
Aaron Douglas Kuenn
Bachelor of Arts, Bethany College, 2009
Submitted to the Department of Aerospace Engineering and the faculty of the Graduate School of
Wichita State University in partial fulfillment of
the requirements for the degree of Master of Science
August 2013

© Copyright 2013 by Aaron Douglas Kuenn
All Rights Reserved

iii
NON-PLANAR LIFTING-LINE THEORY FOR FIXED AND DEFORMABLE GEOMETRIES
The following faculty members have examined the final copy of this thesis for form and content, and recommend that it be accepted in partial fulfillment of the requirement for the degree of Master of Science, with a major in Aerospace Engineering. Linda Kliment, Committee Chair Kamran Rokhsaz, Committee Member Ikram Ahmed, Committee Member

iv
ABSTRACT
In this thesis, the lifting-line approximation of a flat, unswept wing, originally attributed
to Prandtl, is investigated. The original formulation for a flat wing is examined in detail. The
governing integro-differential equation is developed from its components. The optimum and
general solutions to the original formulation are presented and discussed.
An expanded formulation is presented, which includes the effect of the wake of non-
planar wings. The self-induced velocities of the bound vortex on the wing are assumed to be
small for practical cases and not included in the model. The case of simple dihedral is
considered and the general formulation is simplified to better illustrate the effect of the geometry
on the governing equation. For the simplified dihedral case, the optimal solution remains the
same as for a flat wing.
A simplified finite element model is also included, which accounts for the bending due to
the force generated by the bound vortex. This finite element model is combined with the non-
planar lifting-line equation to create a static aeroelastic model for a wing. The solution of this
problem is iterative, but converges quickly. Lift coefficient and span efficiency factor are
provided for a set of wing geometries for cases of dihedral and wing bending, and the trends are
examined compared to flat wings. Additionally, the resulting geometries after deformation of
the wing are presented and the effect of circulation distribution on the resulting shape is
discussed.

v
TABLE OF CONTENTS
Chapter Page
1. INTRODUCTION ...........................................................................................................1
2. CLASSICAL LIFTING LINE THEORY ........................................................................6
2.1 Formulation .......................................................................................................6 2.2 Solutions to the Traditional Formulation ..........................................................10
2.2.1 Elliptic Lift Distribution .................................................................11 2.2.2 General Lift Distribution.................................................................14
3. PRESENT FORMULATION ..........................................................................................19
3.1 General Formulation .........................................................................................19 3.2 Specific Formulations .......................................................................................23
3.2.1 Dihedral...........................................................................................23 3.2.2 Deformable Wing............................................................................25
3.3 Solution to Non-Planar Formulations ...............................................................28 4. RESULTS AND DISCUSSION ......................................................................................31
4.1 Convergence Analysis ......................................................................................31 4.1.1 Number of Panels ............................................................................31 4.1.2 Numerical Integration Subdivisions ...............................................37
4.2 Wing with Dihedral...........................................................................................37 4.2.1 Effect of Aspect Ratio .....................................................................37 4.2.2 Effect of Dihedral on an Elliptically Loaded Wing ........................42 4.2.3 Effect of Dihedral on Twist ............................................................45 4.2.4 Effect of Dihedral on Taper ............................................................54
4.3 Deformable Wing..............................................................................................56 4.3.1 Deflection ........................................................................................58 4.3.2 Effects on Lift Coefficient and Spanwise Efficiency Factor ..........69
5. CONCLUSION ................................................................................................................76
REFERENCES ............................................................................................................................79
APPENDIX: Non-Planar Lifting Line Code ...............................................................................82

vi
LIST OF TABLES
Table Page
4.1 Effect of Dihedral Angle on Lift Curve Slope and Spanwise Efficiency Factor for Elliptical Wing .............................................................................................43
4.2 Decrease in Span Efficiency Factor for Wings with Compared to Flat ..........................................................................................................49
4.3 Wing Geometries used in Deformable Wing Investigations ........................................57
vii
LIST OF FIGURES
Figure Page
2.1 Horseshoe Vortex System .............................................................................................6
3.1 Generic Non-Planar Wing with Induced Velocities .....................................................21
3.2 Dihedral Wing with Induced Velocities .......................................................................24
4.1 Convergence of Fourier Coefficients for Rectangular Wing ........................................33
4.2(a) Overview of Circulation Distribution over Rectangular Wing .....................................33
4.2(b) Detail of Differences between Normalized Circulation Distributions over Rectangular Wing .........................................................................................................34
4.3 Convergence of Fourier Coefficients for Linearly Tapered Wing ...............................35
4.4 Circulation Distribution over Linearly Tapered Wing .................................................35
4.5 Convergence of Fourier Coefficients for Rectangular Wing with Linear Washout .....36
4.6 Circulation Distribution over Rectangular Wing with Linear Washout .......................36
4.7 (a) Effect of Aspect Ratio on Lift-Curve Slope of Flat Rectangular Wing ........................39
4.7 (b) Effect of Aspect Ratio on Lift-Curve Slope of Rectangular Wing with 6 Degrees of Dihedral ......................................................................................................39
4.8 (a) Effect of Aspect Ratio on Flat Rectangular Wing ........................................................40
4.8 (b) Effect of Aspect Ratio on Rectangular Wing with 6 Degrees of Dihedral ...................40
4.9 Comparison of Span Efficiency Factor, e, for Wings with Varying Aspect Ratio ..................................................................................................................41
4.10 Comparison of Lift-Curve Slope, CLα, for Wings with Varying Aspect Ratios ...........41
4.11 Effect of Dihedral Angle on Lift-Curve Slope for Elliptical Wing ..............................43
4.12 Effect of Dihedral on Drag Coefficient of Elliptical Wing ..........................................44
4.13 Effect of Angle of Attack, α, on Span Efficiency Factor, e, of a Rectangular Wing with 1 Degree of Washout ..............................................................47
4.14 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.1..........................................................................................................47

viii
LIST OF FIGURES (continued)
Figure Page
4.15 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.3..........................................................................................................48
4.16 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.5..........................................................................................................48
4.17 (a) Normalized Spanwise Circulation Distribution for Wings with at ......................................................................................................51
4.17 (b) Normalized Spanwise Circulation Distribution for Wings with at ....................................................................................................51
4.18 (a) Spanwise Circulation Distribution for Wings with at ......................52
4.18 (b) Spanwise Circulation Distribution for Wings with at ....................52
4.19 (a) Normalized Spanwise Circulation Distribution for Wings with at ......................................................................................................53
4.19 (b) Normalized Spanwise Circulation Distribution for Wings with at ....................................................................................................53
4.20 Effect of Dihedral Angle on Lift-Curve Slope of Untwisted, Tapered Wings .............55
4.21 Effect of Dihedral Angle on Span Efficiency Factor of Untwisted, Tapered Wings ...........................................................................................55
4.22 Normalized Deflection of Rectangular Wing with S = 150 ft2 and EI = 1.5x106 at q = 50 psf with Varying Aspect Ratios ...............................................58
4.23 Deflection of an Elliptical Wing with EI = 0.15x106 lbf-ft2 .........................................59
4.24 Angle of Local Normal to Vertical for an Elliptical Wing with EI=0.15x106 lbf-ft2 .....................................................................................60
4.25 Deviations from Elliptical Wing Deflection at CL = 0.25 for Wings with EI = 0.15x106 lbf-ft2 ..................................................................................61
4.26 Deviations from Elliptical Wing Deflection at CL = 0.50 for Wings with EI = 0.15x106 lbf-ft2 ..................................................................................62
4.27 Deviations from Elliptical Wing Deflection at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2 ..................................................................................62

ix
LIST OF FIGURES (continued)
Figure Page
4.28 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.25 for Wings with EI = 0.15x106 lbf-ft2 ......................................63
4.29 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.50 for Wings with EI = 0.15x106 lbf-ft2 ......................................63
4.30 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2 ......................................64
4.31 Spanwise Circulation Distribution at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2 .............................................................................................64
4.32 Normalized Spanwise Circulation Distribution at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2 ..................................................................................65
4.33 Deflection of Elliptical Wing at CL = 0.50 with Constant and Linearly Tapered Stiffness .....................................................................................66
4.34 Increase in Elliptical Wing Deflection from Constant EI = 0.15x106 lbf-ft2 at CL = 0.5 for Linearly Tapered Stiffness ..................................67
4.35 Deviations from Elliptical Wing Deflection at CL = 0.5 for Wings with Linearly Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 .................................68
4.36 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.5 for Wings with Linearly Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 ...............68
4.37 (a) Lift Coefficient for Deformable Elliptical Wing with Root EI = 0.15x106 lbf-ft2 .......70
4.37 (b) Span Efficiency Factor for Deformable Elliptical Wing with Root EI = 0.15x106 lbf-ft2 ..........................................................................70
4.38 (a) Decrease in Lift Coefficient Due to Wing Deflection for Constant EI = 0.15x106 lbf-ft2 ................................................................................71
4.38 (b) Decrease in Lift Coefficient Due to Wing Deflection for 25% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 .........................................72
4.38 (c) Decrease in Lift Coefficient Due to Wing Deflection for 50% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 .........................................72
4.39 (a) Decrease in Span Efficiency Factor Due to Wing Deflection for Constant EI = 0.15x106 lbf-ft2 ................................................................................74

x
LIST OF FIGURES (continued)
Figure Page
4.39 (b) Decrease in Span Efficiency Factor Due to Wing Deflection for 25% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 .........................................74
4.39 (c) Decrease in Span Efficiency Factor Due to Wing Deflection for 50% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2 .........................................75
xi
NOMENCLATURE
a0 lift-curve slope
An Fourier coefficients
AR aspect ratio
b wing span
c wing chord
Cr wing root chord
Ct wing tip chord
Cl 2-dimensional lift coefficient
CL lift coefficient
CN wing normal force coefficient
wing normal force coefficient not generating lift
induced drag coefficient
Di induced drag
e spanwise efficiency factor
F finite element force vector
Fn wing normal force
element of the finite element force vector
h radial distance from a vortex
Ke, KE finite element stiffness matrix
finite element sub matrix
lift per unit span
finite element beam length

xii
NOMENCLATURE (continued)
M finite element moment vector
element of the finite element moment vector
local wing normal direction
p finite element panel end points
S wing area
s arc length
freestream velocity
w downwash
X finite element deflection vector
x, y, z Cartesian coordinates
geometric angle of attack
effective angle of attack
induced angle of attack
wing zero-lift angle of attack
angle between vortex radius and y-direction
vortex strength
induced drag factor
transformation polar coordinates and finite element beam deflection angle in Chapter 3
angle between wing normal and z-direction
air density
lift-curve slope parameter

xiii
NOMENCLATURE (continued)
effective twist angle

1
CHAPTER 1
INTRODUCTION
Efficiency of aircraft has been a primary concern of engineers since the earliest days of
flight. Tools have been developed to analyze large sets of potential geometries for their
efficiency. However, with the advent of airframes taking advantage of aeroelastic properties, it
is important to have tools that can provide information on the behavior of preliminary designs
when lifting surfaces are not flat.
The first formulation of the lifting-line approximation was derived by Prandtl in the mid-
to late-1910s in Germany, published by NACA in the 1920s.1 The original formulation replaced
the wing with an infinite number of horseshoe vortices of undetermined strength. Prandtl found
that an elliptical circulation distribution provided an appropriate solution to the resulting integro-
differential equation, but the equation was not immediately solved for the most general case of
an arbitrary planform.
For unswept wings, Munk2 addressed the minimum induced drag. He showed that
minimum induced drag for a flat wing occurs when the downwash is constant along its span.
This holds true for systems of wings at the same station in the flow direction, and also for
unswept wings at any station in the flow-direction as well, i.e. wings of planes flying in
formation. Munk generalized even further by considering unswept, non-planar wings. He
showed that for these wings, the minimum induced drag occurred when the normal wash, i.e. the
induced velocity normal to the wing, was constant along the span. While an important
advancement, Munk2 did not provide a method with which to determine the planform shape that
produced the induced velocities required to achieve the minimum drag.

2
Shortly after Prandtl’s work was published, Glauert3 proposed a solution to the general
case. Glauert showed that a Fourier sine series could represent the circulation distribution over
the wing and since a Fourier series can represent any continuous function on a closed interval,
this form allowed for the representation of any distribution over the wing. By selecting a finite
number of control points along the wing and requiring the lifting-line equation to be satisfied at
each point, a system of linear equations could be formed, to solve for the unknown Fourier
coefficients. These coefficients were obtained analytically. The collocation method is often
presented in textbooks4,5 as an instructional method to help students understand the
approximation. While popular, the collocation method may not capture sudden changes in
circulation, as due to ailerons or flaps, unless the control points are located in the correct
locations.6
Other solution methods have been developed as alternatives to or improvements on the
collocation method. Methods developed that provide approximate solutions, classified by
Rasmussen and Smith6 as “variational methods,” used weighted integrals to account for the
planform shape and twist.7,8 Another method, used by Karamcheti,9 Lotz,10 and Rasmussen and
Smith,6 represented the twist and chord distributions with Fourier series in addition to the
circulation. Karamchetti and Lotz represented the twist in a conventional Fourier series, and the
chord in terms of its inverse, while Rasmussen and Smith6 represented both with conventional
Fourier series. The benefit seen in Rasmussen and Smith’s work was a more quickly converging
series solution than the traditional collocation method, and a more accurate result when more
terms are used in the series approximation.
Despite the utility of the traditional formulation, it was constrained to unswept, planar
wings. Modifications to the method were made by Weissinger,11 allowing the analysis of swept

3
wings. Weissinger’s method divides the wing into a discrete number of panels, with a horseshoe
vortex on each. These horseshoe vortices were positioned with the bound vortex at the local
quarter-chord, parallel to the leading edge of the wing, with flow tangency enforced at the three-
quarter chord, using Pistolesi’s three-quarter chord theorem.12 Weissinger’s formulation formed
a system of linear equations, similar to Glauert’s.3 This method was developed before the advent
of computers and the solution for 7 control points along the span required about 8 hours of
calculation,11 a significant increase in time over Glauert’s method. This original model was later
modified by Owens,13 who combined it with Prandtl’s non-linear lifting line method, which can
be found in Anderson.4 Owen’s modification agreed favorably with experimental results for lift
and drag and accurately predicted stall location for unswept wings with and without taper and
twist.13
Using the work of Munk2, Cone14 developed a generalization to the original lifting-line
equation which incorporated the effects of the wing being non-planar. During his development,
Cone14 stated that for small to moderate deflection angles, the bound vortex did not contribute a
significant induced velocity on itself and could be ignored for most practical cases. Using
complex change of variables, he solved for the circulation distribution over wings in a family of
circular arc segments, and showed an improvement of span efficiency factor of up to 50% over
that of an elliptical wing of the same span. Cone14 addressed additional geometries of practical
and impractical nature, such as straight winglets at different angles, curved winglets, annular
winglets, and even annular wings. In all cases, wings with non-planar elements showed
increased efficiency over wings with the equivalent projected span.
Additional research concerning non-planar wings has been performed at higher speed
regimes, where many modern transport aircraft fly. One such example is the work by Takahashi

4
and Donovan15, who analyzed various candidate geometries to categorize the most efficient
system using the Treftz plane analysis. This analysis does not use the governing integral
equation developed by Prandtl1 directly, but employs the downwash at a station far downstream
of the wing.9 Takahashi and Donovan15 concentrated on transport category design, which
included a 33 degree sweep and Mach numbers in the transonic regime. The report showed
improvements in efficiency for all non-planar lifting surface configurations, with the greatest
improvements in induced drag resulting from a either a bi-plane configuration or a mono-wing
with boxed winglets.
Nguyen16 focused on the benefits from aeroelastic deformation of a wing on a transport
category aircraft. The structural deformation was considered in the chordwise and normal
directions as well including twisting of the wing. The aerodynamic solution was not achieved
using any derivative of the lifting-line model, but using a computational fluid dynamics code,
which was coupled with the structural analysis. This joint solver was complimented with a
numerical optimizer. The optimized shape proved to be a wing with downward droop toward the
wingtips having a greater efficiency than upward deflected wings, both as compared to an
originally flat baseline wing.
In this thesis, the classical formulation of the problem is discussed in depth in Chapter 2.
The governing integro-differential equation is developed from its components and the optimum
and a generalized solution are presented. Chapter 3 contains the development of the general non-
planar formulation, starting from the classical formulation presented in Chapter 2. The case of
simple dihedral is considered and the general formulation is simplified to better illustrate the
effect the geometry has on the governing equation. A simplified finite element model is
presented to account for wing bending under aerodynamic loads. This model does not account
5
for deformations in torsion. This finite element model is combined with the non-planar lifting-
line equation to create a static aeroelastic model for a wing. The results from the solution of the
non-planar formulations are presented in Chapter 4. The optimum spanwise lift distribution for
wings with dihedral is shown to be elliptical, unchanged from the traditional formulation. Lift
coefficient and span efficiency factor are provided for a set of wing geometries for cases of
dihedral and wing bending, and the trends are examined compared to flat wings. Additionally,
the resulting geometries after deformation of the wing are presented and the effect of circulation
distribution on the resulting shape is discussed.
Finally, Chapter 5 is devoted to the summary of the work, the conclusions drawn, and the
recommendations for further research.

6
CHAPTER 2
CLASSICAL LIFTING LINE THEORY
The classical lifting-line theory is presented in detail. It is assumed that the reader is
familiar with the basic assumptions that are used in the derivation. The theorems used here will
be the Biot-Savart law, Helmholtz’s theorems, the Kutta-Joukowski theorem, and Prandtl’s
theorem. These can be found in sufficient detail in most textbooks (Reference Anderson et al.4).
Elliptical and general lift distributions are provided for the classical lifting line theory.
2.1 Formulation
The following formulation of lifting line theory is originally credited to Ludwig Prandtl.1
However, with its wide applications and usefulness as a teaching tool, the method can be found
in most aerodynamics texts.3,4,5 The formulation presented below follows the formulation found
in Anderson,4 which in turn follows the original reasoning of Prandtl.1
A coordinate system is positioned on a wing, such that the center of the wing span is
aligned with the x-axis and the quarter chord lies along the y-axis. Incoming flow is traveling in
the xz plane towards the wing with an angle to the x-axis as seen in Figure 2.1.
The wing is replaced with a bound vortex of strength along the y-axis from
Figure 2.1: Horseshoe Vortex System
𝛤
=
2
=
2
𝑥
𝑧
𝑉∞ 𝑔𝑒𝑜

7
to . According to the Kutta-Joukowski theorem, this vortex will experience a lifting
force of
𝑉 (2.1)
In order to not violate Helhmoltz’s theorems, the vortex cannot end at the wingtips. Instead, the
vortex will be in the shape of a horseshoe with the filament leaving the wingtip and forming a
two-pronged wake that extends to ∞.
This simple model was one of the first of its form. The deficiency of this simple model
arises with the downwash. The Biot-Savart law shows clearly that the bound vortex does not
induce a velocity upon itself in any direction; however the free vortices from either wingtip
induce a velocity in the negative z-direction across the length of the bound vortex.
When the Biot-Savart law is simplified for a semi-infinite vortex filament, it takes on the
form:
𝑉
∫
(2.2)
Then, the substitution of the current geometry produces:
( ) (
( )
) (
( )
) (2.3)
It is clear that as or , the denominator in one or the other of the components
of Equation 2.3 tends to zero, which leads to a downwash of infinity. This infinite downwash is
nonphysical and prevents significant information from being gathered from this version of the
model.

8
The solution posed by Prandtl1 is that the wing is not formed by a single horseshoe
vortex, but by a large number superimposed over the wing. By stacking these horseshoe vortices
over one another, the model is accurately represents a continuous distribution over the length.
The bound vortex is then represented by an infinite number of filaments overlaid across
the span of the wing. With an infinite number of horseshoe vortices, each has the infinitesimal
strength, . At any arbitrary location along the bound vortex, an infinitesimal segment can be
isolated. Let this segment be . At this location, the circulation strength is ( ) and the
change over the infinitesimal length, ( ) So as not to violate Helmholtz’s
theorems, if the change in vortex strength over the length is , so must the strength of the
trailing vortex that departs at .
Considering that there is a trailing vortex in each infinitesimal segment, , it is
important to examine the effect that each segment has on an arbitrary location . Using the
Biot-Savart law, it is again evident that there is no effect at due to the bound vortex segment
. The trailing vortex will create a downwash equal to:
(
)
( ) (2.4)
This consideration is then extended to include the induced velocity from the entire wake at the
point . This extension takes the form of an integral from wingtip to wingtip:
( )
∫
(
)
( )
(2.5)
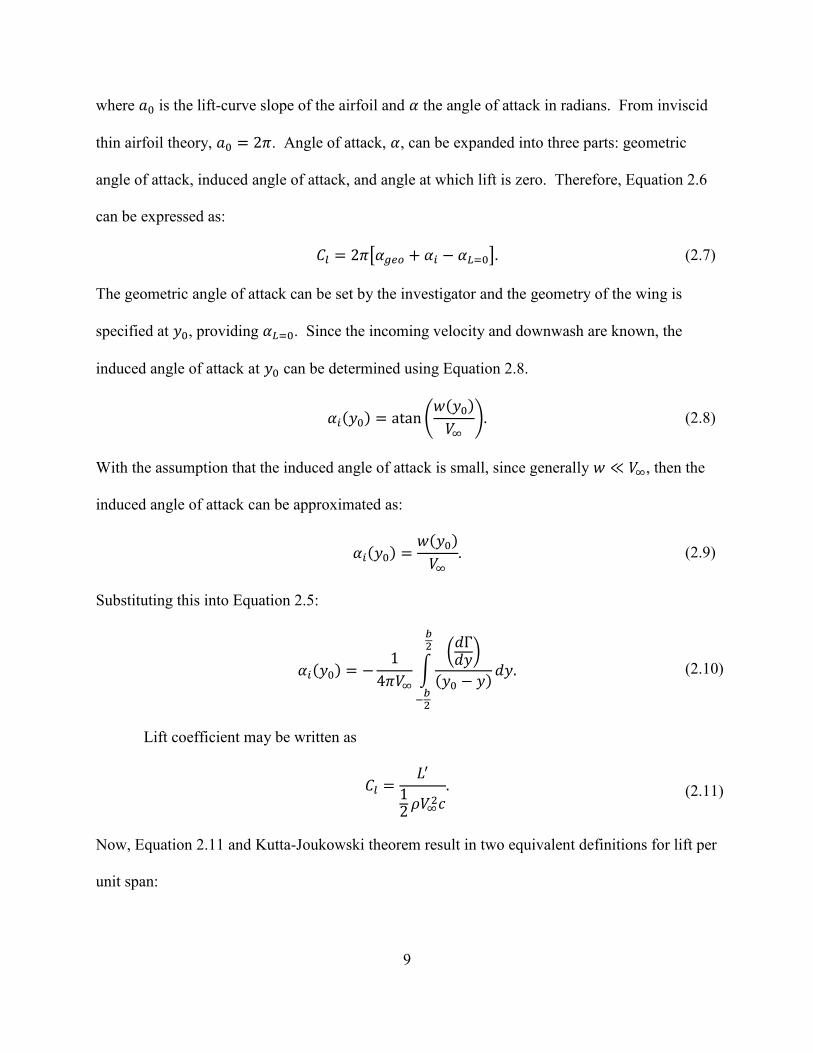
It is helpful at this point to recall that for an airfoil,
(2.6)
9
where is the lift-curve slope of the airfoil and the angle of attack in radians. From inviscid
thin airfoil theory, . Angle of attack, , can be expanded into three parts: geometric
angle of attack, induced angle of attack, and angle at which lift is zero. Therefore, Equation 2.6
can be expressed as:
[ ] (2.7)
The geometric angle of attack can be set by the investigator and the geometry of the wing is
specified at , providing . Since the incoming velocity and downwash are known, the
induced angle of attack at can be determined using Equation 2.8.
( ) ( ( )
𝑉 ) (2.8)
With the assumption that the induced angle of attack is small, since generally 𝑉 , then the
induced angle of attack can be approximated as:
( ) ( )
𝑉 (2.9)
Substituting this into Equation 2.5:
( )
𝑉 ∫
(
)
( )
(2.10)
Lift coefficient may be written as
𝑉
(2.11)
Now, Equation 2.11 and Kutta-Joukowski theorem result in two equivalent definitions for lift per
unit span:

10
𝑉
( ) 𝑉 (2.12)
Equation 2.12 can be rearranged for :
( )
𝑉 ( ) (2.13)
Combining Equation 2.13 with Equation 2.7 provides:
( )
𝑉 ( ) ( ) (2.14)
When Equation 2.9 is substituted for and moved to the other side, Equation 2.14 becomes, as
found in Anderson:4
( ) ( )
𝑉 ( ) ( )
𝑉 ∫
(
)
( )
(2.15)
As Anderson states, “this is the fundamental equation of Prandtl’s lifting-line theory.”4 It is
important to note that the circulation distribution is the only unknown in Equation 2.15.
2.2 Solutions to the Traditional Formulation
With the governing equation assembled, solutions can be presented. After the problem
was derived, Tietjens and Prandtl,17 used trial to find circulation distributions that allowed the
integral to be calculated easily. Coincidentally, a semi-elliptic circulation distribution was found
to produce a simple solution. Only later was this solution found to provide even more important
insight.
Later on, researchers sought formulations that would allow them to input the
characteristics of the wing and solve for the circulation distribution and compare the effect of
various designs. This general method, while useful, is time consuming to calculate by hand.

11
However, with the development and advancement of computers, this method has become the
primary technique to handle the governing equation.
2.2.1 Elliptic Lift Distribution
Suppose the circulation distribution can be expressed as:
( ) √ (
)
(2.16)
where is the circulation at the origin. This equation defines a semi-elliptical distribution of
circulation over the wing. If Equation 2.16 is substituted into Equation 2.1 the result is,
( ) 𝑉 √ (
)
(2.17)
which implies the lift distribution is also elliptical. It can be observed that, as expected,
circulation and lift go to zero at the wingtips.
If Equation 2.17 is used to calculate the downwash over the wing, the derivative is of the
form:
√ (
) (2.18)
When Equation 2.18 is substituted into Equation 2.5, the downwash becomes:
( )
∫
√ (
)
( )
(2.19)
In order to easily evaluate this integral, the following simplification can be made for :
𝑜 (2.20)

12
When this substitution is made to Equation 2.19, with the limits being transformed to and
respectively, the downwash becomes:
( )
(2.21)
It is of value to note that downwash is constant over the entire wing. This will be discussed in
further detail later. Retaining the assumption of small angles:
( ) ( )
𝑉
𝑉 (2.22)
If Equation 2.17 is transformed using Equation 2.20 and subsequently integrated across
the wing, the lift becomes
𝑉
∫
𝑉
(2.23)
If Equation 2.23 is then rearranged and combined with the definition for lift coefficient, the peak
circulation is
𝑉
(2.24)
Substituting Equation 2.24 back into Equation 2.22 provides:
(2.25)
which, with the definition of aspect ratio, becomes:
(2.26)
The induced angle of attack is simple to calculate given an elliptical lift distribution. This
expression is used in the determination of the induced drag.
Considering the induced drag on the wing:

13
(2.27)
Assuming small angles, Equation 2.27 is approximated as
(2.28)
Integrating across the entire wing and using the Kutta-Joukowski theorem for lift provides
𝑉 ∫ ( ) ( )
(2.29)
which quickly follows to:
𝑉 ∫ ( ) ( )
(2.30)
It should be noted that the induced drag is provided as a product of the lift generated and the
induced angle of attack.
The induced angle of attack is constant across the wing, as shown in Equation 2.22.
Therefore, it may be brought outside of the integral for induced drag, leading to:
𝑉 ∫ ( )
𝑉 ∫√ (
)
(2.31)
When Equation 2.31 is transformed using Equation 2.20 and the integral is solved:
(2.32)
There are two very important relationships given here. First, it is noted that induced drag
is inversely proportional to the aspect ratio of the wing. This is understandable, as the Biot-
Savart law shows the effect of a vortex filament on a point decreases as the distance between the

14
two increases. The wingtips have less effect on the center section of the wing as the wingspan
increases or the wingtip chord decreases. Secondly, the induced drag is proportional to the
square of lift coefficient. The relationship between the lift and induced drag is clear, as
Anderson4 so efficiently explains: since the wingtip vortices that create the induced angle of
attack are generated by the same pressure difference that creates the lift; “the induced drag is the
price for the generation of lift.”
2.2.2 General Lift Distribution
The wing may also generate an unknown circulation distribution over the wing. In order
to determine meaningful results, an expression must be provided for the circulation distribution
that not only adequately represents it, but also can be integrated in Prandtl’s lifting-line equation.
Since a Fourier series can be formed to represent any periodic function, this is a good starting
point, as well as one that has become the most prevalent solution method.
Using the boundary conditions that the circulation and lift go to zero at the wing tips, it
can be seen that there will be no cosine components to the series. Therefore, the circulation is
represented by a Fourier sine series. The general lift distribution becomes:
( ) 𝑉 ∑
(2.33)
Equation 2.33 is not any more useful than an unknown distribution as there is no
guarantee that the series will truncate itself after a finite number of terms. Additionally, there are
still an infinite number of undetermined coefficients, the . If the assumption is made that
sufficient accuracy can be realized by truncating the series to terms, a simple change can be
made, resulting in the simplification of Equation 2.33 to:

15
( ) 𝑉 ∑
(2.34)
In order to make use of the governing equation of Prandtl’s theorem, the derivative of the
circulation distribution is also necessary. This derivative is:
𝑉 ∑
(2.35)
and can then be substituted into the governing equation. The result becomes:
( )
( )∑
( )
∫
∑
( )
(2.36)
While the integral looks no less intimidating than before, it turns out there is actually a
closed form solution. Derived in Karamchetti,9 it can be seen that αi is given by:
∫
∑
( )
∑
∫
( )
∑
(
) ∑
(2.37)
This remarkably simple, closed-form solution allows the governing equation to be simplified
greatly. Without the integrand, Equation 2.36 becomes:
( )
( )∑
( ) ∑
(2.38)
Now, while the equation is in a much simpler form, there are still unknowns. In order
to solve for these unknowns, and thus for the circulation distribution, a set of linear equations

16
is created using points distributed across the bound vortex. The simultaneous solution of these
equations provides the , and therefore the circulation distribution.
Equation 2.12 can be rearranged for and the Fourier series for circulation distribution
can be substituted in. Finally integrating over the wing, is:
∑
∫
(2.39)
indicating that the lift coefficient only depends on the leading coefficient of the Fourier series.
As shown in Equation 2.28, the induced drag can be defined using the lift and induced
angle of attack. The substitution of the circulation distribution can be made for , resulting in
∑
∫ ( )
(2.40)
The induced angle of attack is given by Equation 2.37. As shown in Equation 2.37,
Karamchetti’s work9 provides the simplification to:
( ) ∑
(2.41)
It should be noted that can equally be called with no change to the meaning of the equation.
Making this change of variable and substituting Equation 2.42 back into Equation 2.40, the result
follows as:
∫ ∑
∑
(2.42)
which simplifies to:
∫ ∑
∑
(2.43)

17
Using the identity:
∫
{
(2.44)
Equation 2.43 can be expressed as:
(∑
)
∑
(2.45)
When Equation 2.45 is rearranged and the first coefficient, , is moved to the front, the
equation takes on the form:
( ∑ (
)
) (2.46)
Using Equation 2.39, the first part of Equation 2.46 can be expressed in terms of the square of
the lift coefficient. Hence:
( ∑ (
)
) (2.47)
This form provides clear insight between the induced drag of an elliptically loaded wing and that
of a general lift distribution. The reader should recall that Equation 2.32 showed the induced
drag of an elliptically loaded wing to be:
which is the first term of Equation 2.47. The second term of Equation 2.47,
∑ (
)
(2.48)
can never be negative; the least the second term can be is zero. Therefore, the minimum induced
drag on a flat wing is that of an elliptical distribution. If is defined such that:

18
∑ (
)
(2.49)
and this used to further define 𝑒 ( ) then Equation 2.47 can be rewritten as:
𝑒 (2.50)
where 𝑒 is a measure of how close the lift distribution over the wing is to elliptical. When the lift
distribution is elliptical, 𝑒 . As the distribution deviates further from elliptical, 𝑒 decreases,
increasing the induced drag on the wing.

19
CHAPTER 3
PRESENT FORMULATION
In this chapter the modifications to the classical lifting line theory made for the present
investigation are set forth. These modifications are presented relying on the same theorems used
in Chapter 2 with extension to non-planar wings. As with the classical formulation, the
assumptions of incompressible, inviscid, irrotational, and steady flow are applied. Rather than
assuming that the wake behind the wing is flat, it is assumed that the wake retains the shape of
the wing to infinity.
3.1 General Formulation
The current formulation begins similarly to the traditional formulation, with a wing
which is of generic planform, but is unswept. Instead of being flat, the wing varies in height
above the x-y plane symmetrically about the origin. The wing is further approximated in the
same manner as the traditional method, with a bound vortex attached at the quarter-chord of the
wing from wingtip to wingtip, and trailing wake composed of infinitely many vortex filaments of
strength , where is the arc length along the wing. From here the development is the
same as for a planar wing, with alterations made to accommodate the change in wing geometry.
The most significant change that must be accounted for in this extension comes from the
Biot-Savart law. In the traditional formulation, the entire wing and wake were aligned with the
y-axis, allowing for simplicity of handling the influence on the wing by the trailing vortices. The
most general form of the influence of a semi-infinite vortex filament,
𝑉
∫
(3.1)

20
is still applicable in this case. However, must be treated differently now. As can be seen in
Figure 3.1, instead of representing as
(3.2)
as was done in the traditional formulation, the z-distance must also be considered. Here, the
distance between and , represented in the figure by the vector , is equivalent to:
√( ) (𝑧 𝑧) (3.3)
This change in distance is rather simple. In order to simplify the transformations later on, the
height above the y-axis is considered to be a function of ; that is,
𝑧 𝑧( ) (3.4)
This relationship, for all fixed geometries, allows the arc length of the wing to be calculated
using
∫√ ( 𝑧
)
(3.5)
For the wing geometries chosen in this investigation, the derivative is known for the
function 𝑧( ). For cases where the geometry is not provided by an equation, Equation 3.5 is
rearranged to compute the 𝑧- and -coordinates based on arc length. A similar procedure is used
in Section 3.2.3.
With the deviation in the height, it can be seen that the induced velocity is not only in the
z-direction. There is now a component that is in the y-direction as well. To handle this, the
angle is defined, where
(𝑧 𝑧
) (3.6)

21
The total induced velocity in the z-direction at by the vortex filament located at 𝑧 is
given as:
𝑉
√( ) (𝑧 𝑧) (3.7)
However, since the wing is not flat, and the bound vortex will generate a velocity normal to the
incoming velocity and direction of the vortex filament at 𝑧 , the normal direction of the wing
at 𝑧 must also be considered. For the normal direction at 𝑧 given by , the angle
between the z-axis and is an angle of interest. This angle is called . With this angle, the
induced velocity normal to the wing at 𝑧 is:
𝑉
√( ) (𝑧 𝑧) ( ) (3.8)
The closer the influencing trailing vortex is to the control point, the closer to unity
𝑜 ( ) will be, supposing the wing shape is continuous and the vortex filament and control
point are on the same half of the wing.
Since the wing is no longer planar, the self-influence of the bound vortex must be
considered. It is clear, that the more the wing shape deviates from being planar, the more
𝑧
𝑧
𝑧
Figure 3.1 Generic Non-Planar Wing with Induced Velocities

22
significant the self-induced velocity would be. However, in this analysis, this self-induction has
been treated as negligible. This has been done for two primary reasons.
The first reason is that for most practical configurations, the deflection of the wing is
relatively small. As such, the angle between two sections of the bound vortex would be
relatively small, reducing the induced velocity upon itself. The induced lift from these cases
would negligible. This idea was originally substantiated by Cone.14
The second reason is for ease of computation. When considering the influence of the
bound vortex on itself, there would be a discontinuity at the control point. The handling of this
discontinuity would be non-trivial and if handled incorrectly, could reduce rather than increase
the accuracy of the solution.
If the necessary changes to the governing equation due to the change in geometry are
examined, it can be seen that the formulation remains very similar to the classical formulation.
When the required changes are substituted back into Equation 2.10 for induced angle of attack,
the result is:
( )
𝑉 ∫
(
)
√( ) (𝑧 𝑧) ( )
(3.9)
Since the freestream velocity is unchanged, and the assumption that the incoming wind is at a
small angle to the wing is retained, the induced angle of attack remains familiar.
It is important to remember that this induced angle of attack at is a local induced
angle; the angle is relative to the normal of the wing at the control point, not the y-axis.
If this modified induced angle of attack is included in the governing equation, they
become:

23
( ) ( )
𝑉 ( ) ( )
𝑉 ∫
(
)
√( ) (𝑧 𝑧) ( )
(3.10)
While 𝑧 terms are included currently in the integrand, there is still only one unknown, ( ), as
the geometry of the wing is defined. Furthermore, and are known and are relative to
the normal direction at the control point.
3.2 Specific Formulations
While the general formulation of the problem is strikingly similar to the traditional
formulation, it can be seen that the integration is non-trivial and for every case examined in this
investigation, requires numerical methods to compute. As it would be impossible to adequately
cover every case of a deformed wing in any succinct manner, this investigation focuses on two
specific cases: simple dihedral and an aeroelastic model. Each of these requires its own
simplification and handling.
3.2.1 Dihedral
Let the wing be made of two identical semi-span pieces, joined at the origin. Further,
each half of the wing is inclined at an angle from the y-axis. As can be seen in Figure 3.2, if
the semi-span of each half-wing, , is kept the same, then there are three simplifications in the
governing equation: the projected span, the denominator for the induced angle of attack, and the
definition of 𝑜 ( ) in the integrand.

24
Starting with the cosine term in the integrand, it can be seen that is constant on either
side. Moreover, if the control point and the inducing vortex are on the same half of the wing, the
cosine term disappears completely, as .
Using Figure 3.2, the projected span can be represented simply by:
(3.11)
Similarly, the 𝑧 components can be expressed as a function of as well:
𝑧( ) (3.12)
As this dihedral is constant for a case and across the whole wing, this definition is substituted
into the denominator of Equation 3.8:
√( ) (𝑧 𝑧) √( ) ( ) (3.13)
Relating the arc-length and the y and z-coordinates is simple for this case, as it is merely
the hypotenuse of the triangle along one side of the wing. Therefore, the arc-length is:
√ 𝑧 (3.14)
Because the relationship between y and z is known, it is possible to calculate every value needed
for the governing equation, which becomes:
V
r
( )
𝑧
𝑧
𝑧
s
Figure 3.2 Dihedral Wing with Induced Velocities
V
r
( )
s
25
( ) ( )
𝑉 ( ) ( )
𝑉 ∫
(
)
√( ) ( ) ( )
(3.15)
It is important to remember that , , , and are all functions of . The variable is
used because it keeps the governing equation cleaner. The substitution of arc-length, , into the
denominator yields no simplification of the integration or increased insight into the character of
the equation.
3.2.2 Deformable Wing
Until this point, all cases of wing geometry have been presented as rigid. However, this
assumption can be removed to extend the investigation into static aeroelasticity.
Assume the starting wing can be any geometry fitting the criteria for Chapters 2 or 3. For
simplicity, the cases considered in this investigation will initially be flat. Using the governing
lifting line equation for the given planform, and can be determined for the wing.
Moreover, since is known, the lift distribution is known across the wing. The distributed
loading, ( ), is determined using the resultant lift coefficients and the freestream quantities
and 𝑉 . For the initial case of a flat wing, bending force applied to the wing is equal to the lift,
( ) 𝑉 ( ) (3.16)
The governing equation, Equation 3.10, results in the force normal to the wing, independent of
the shape of the wing. When the wing is not flat, the lift is calculated using the angle between
the z-direction and the local normal vector of the wing.
The wing is modeled using a simple finite element method. It is assumed that
deformations are limited to the y-z plane and that lift distribution does not affect twist. The wing

26
is divided into discrete “beams” along the lifting line to model bending. Each of these beams is
represented using a local stiffness matrix:
{
}
[
[
] [
]
[
] [
]] {
𝑧
𝑧
} (3.17)
Expressing this in more condensed form,
{ } [ ]{ } (3.18)
such that
[ ] [
] (3.19)
with each a 2x2 matrix.
The wing is represented by elements. Since the loads on the wing are symmetric, the
wing is considered starting from the midspan to one wingtip, the results mirrored to the other
half. To accurately model the wing, each of the local stiffness matrices is combined together to
create a global stiffness matrix of the form:
[ ]
[
]
with { }
{
𝑧
𝑧
𝑧
}
. (3.20)
The wing is modeled as a cantilevered beam. Therefore, the deflection and slope at the
root are uniformly zero, or:
𝑧 (3.21)

27
It can be seen that when performing the matrix multiplication, the boundary conditions imposed
remove the first two rows and columns of the global stiffness matrix (elements ,
, and
) leaving:
[ ] [
] (3.22)
The resultant governing equation for the bending then becomes:
{
}
[ ]
{
𝑧
𝑧
}
(3.23)
It is possible to separate the global stiffness matrix into 4 matrices such that:
{{ } [ ]{𝑧} [ ]{ }
{ } [ ]{𝑧} [ ]{ } (3.24)
Since there are no moments applied to the wing, that is:
(3.25)
the resulting set of equations takes the following form:
{{ } [ ]{𝑧} [ ]{ }
{ } [ ]{𝑧} [ ]{ } (3.26)
By solving the second equation for and substituting it into the first, the equation to solve for the
deflections becomes:
{ } [[ ] [ ][ ] [ ]]{𝑧} (3.27)
The solution of this system of linear equations provides the deflection of the end point of each
panel.

28
Now that the deflections are known, the lifting line model can be used upon the newly
deformed wing. The only change in the governing lifting line equation is that the z-locations and
consequently the normal vectors of the control points are defined through the bending model.
If it is assumed that the panels themselves are rigid, that is the deflection occurs only at
the end points and the panels are at a constant slope between end points, then the model is
greatly simplified. For each panel the normal is then defined as:
𝑧 𝑧
(3.28)
The governing aerodynamic equation, Equation 3.10, is solved using a collocation
method, which provides the forces generated at the mid-point of the elements. The governing
bending equation, Equation 3.17, requires the forces at the end-points of each panel. In order to
match the two distributions, the normal force on the ith-panel was split equally between its end-
points. That is, for end-points and , we have:
( ) ( )
(3.29)
3.3 Solution to Non-Planar Formulations
The solution of the non-planar formulation of the lifting-line equation is quite similar to
that of the traditional formulation, in that a general lift distribution is solved for using the
collocation method. As was stated earlier, the influence of the bound vortex on itself is not
considered in this solution.
For the collocation method used in this investigation, the wing was divided into N
discrete panels, each with a control point at its center. These panels created a set of linear
equations that were solved simultaneously, providing the Fourier coefficients. The coefficients
were then used to compute the lift and drag coefficients across the wing.

29
The calculation of the drag was performed in the same manner as for the traditional
formulation. As before, the Cartesian coordinates are converted to polar coordinates using the
transformation:
(3.30)
However, since the wings were non-planar in this investigation, it was necessary to consider the
normal of the wing when calculating the lift. The normal force coefficient was simple to
calculate, as it is the force perpendicular to the wing at all points, and therefore given directly by
the Fourier series:
∑
∫
(3.31)
In order to calculate the lift, the angle between the z-axis and the local normal of the wing was
taken into consideration. This modified the integral to be:
∑
∫
(3.32)
The additional term is also a function of . In order to solve this integral for the current
formulation, the integration was carried out numerically.
Recalling Equation 3.8, it can be seen that while integrating across the control point, the
induced angle of attack becomes undefined. To resolve this singularity, the wing was treated in
two pieces, with the section of the wing immediately around the discontinuity considered
separately from the majority of the wing. Outside the region immediately surrounding the
singularity, the integration was performed using Simpson’s rule; across the singularity, the
30
integration was performed using the trapezoid rule. This prevented evaluation of the function at
the singular point.
It should also be noted here that the governing equation contains the aspect ratio, which
has an effect of the characteristics of the wing, as was shown in Chapter 2. A decision was
required in this investigation whether the actual or the projected span of the wing would be used.
For many cases, the effect of the change in the aspect ratio could be considered negligible.
However, for the larger deflections, which would be expected to have a larger variation from
planar aerodynamic characteristics, the aspect ratio could vary significantly. It was decided,
therefore, to use the projected span of the wing. This decision was believed to account for the
amount of the normal force in the lifting direction, given by the first term on the right hand side
of Equation 3.9, generated by the un-influenced wing.

31
CHAPTER 4
RESULTS AND DISCUSSION
In this chapter, the results from the classical solution and the current formulation are
presented and discussed. The classical results are used for validation. The sensitivity of the
problem to the number of spanwise panels was determined with the comparison of the Fourier
coefficients obtained through the classical solution. These Fourier coefficients were then used to
determine the number of subdivisions required for the numerical integration used in the present
formulation.
In the present solution, the case of a wing with dihedral and an initially flat, deformable
wing were considered in detail. For dihedral, this investigation focused on the lift-curve slope
and induced drag of the planforms considered to determine the effect of non-planar geometries.
For deformable cases, in addition to induced drag and lift-curve slope, the effect different
planforms had on wing shape after bending was also considered.
4.1 Convergence Analysis
4.1.1 Number of Panels
In order to determine the number of panels needed for the simulation, 3 cases were
examined. The cases were run at an angle of attack of 4 degrees with a wing of AR = 10. The
first case considered was a rectangular wing with no twist; the second case an untwisted but
tapered wing with ; the final case as that of a rectangular wing with a linear two-
degree washout. All solutions were obtained with 8, 16, 32, and 64 panels.
As can be seen in work performed by Rasmussen and Smith,6 an increase in the number
of panels results in the convergence of the individual coefficients towards an asymptotic value.
To compare the effect of additional panels on the individual coefficients, the Fourier coefficients

32
were first normalized relative to the values obtained using 64 panels. The normalized
coefficients were then compared as the number of panels was changed. The results are shown in
Figure 4.1.
As can be seen in Figure 4.1, the first 3 non-zero Fourier coefficients converged quickly
for the untwisted rectangular wing. For all solutions obtained using more than 8 panels, each of
the coefficients was within 0.5% of the value at 64 panels. The circulation distribution, seen in
Figure 4.2, confirmed the quick convergence of the solution. Part (a) of Figure 4.2 shows an
overview of the distribution over the semi-span, with Part (b) showing a detailed view of the
differences in the circulation distributions inboard of . The distributions for 16, 32
and 64 panels cannot be distinguished from each other. Thus from the rectangular wing, it was
determined that a minimum of 16 panels would need to be used for reasonable convergence.
When the more complex, tapered wing case was considered, 16 panels did not lead to a
converged solution. As can be seen in Figure 4.3, the Fourier coefficients for 16 panels still
displayed as much as 1.6% difference from the 64-panel case. This was reinforced by the
circulation distribution seen in Figure 4.4. The 8- and 16-panel cases showed deviation from the
other two curves. The 32- panel case agreed well with the 64-panel case. The maximum
deviation in the first 3 coefficients was less than 0.2% between the 32-panel and the 64-panel
cases. While larger percent differences were seen in higher order coefficients, the magnitudes of
the coefficients where these errors manifested were significantly less than the first coefficients.
It was determined that based on this geometry, a minimum of 32 panels would be needed.

33
Figure 4.1 Convergence of Fourier Coefficients for Rectangular Wing
Figure 4.2 (a) Overview of Circulation Distribution over Rectangular Wing
0.90
0.95
1.00
1.05
1.10
1.15
1.20
8 16 24 32 40 48 56 64
Nor
mal
ized
Fou
rier
Coe
ffic
ient
Number of Panels
A1
A3
A5
0.00
0.20
0.40
0.60
0.80
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion
Dis
trib
utio
n, Γ
/Γm
ax
Spanwise Location, y/b
8 Panels16 Panels32 Panels64 Panels
A1
A2
A3

34
Figure 4.2 (b) Detail of Differences between Normalized Circulation Distributions over Rectangular Wing
The final case of a rectangular wing with washout reinforced the findings from the case
of the tapered wing. As seen in Figure 4.5, the coefficients showed 6% error in A3 with 16
panels, and 1.1% error with 32 panels. While this error was more than desired, as shown in
Figure 4.6, the circulation distributions with 32 and 64 panels agreed well, with less than 0.25%
difference between the two.
Based on the three cases analyzed, and computational efficiency, it was decided that 32
panels would be used for the remainder of the analysis.
0.80
0.85
0.90
0.95
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40
Nor
mal
ized
Cir
cula
tion
Dis
trib
utio
n, Γ
/Γm
ax
Spanwise Location, y/b
8 Panels16 Panels32 Panels64 Panels

35
Figure 4.3 Convergence of Fourier Coefficients for Linearly Tapered Wing
Figure 4.4 Circulation Distribution over Linearly Tapered Wing
0.90
0.95
1.00
1.05
1.10
1.15
1.20
8 16 24 32 40 48 56 64
Nor
mal
ized
Fou
rier
Coe
ffic
ient
Number of Panels
A1
A3
A5
0.00
0.20
0.40
0.60
0.80
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion
Dis
trib
tuio
n, Γ
/Γm
ax
Spanwise Location, y/b
8 Panels16 Panels32 Panels64 Panels
A1
A2
A3

36
Figure 4.5 Convergence of Fourier Coefficients for Rectangular Wing with Linear Washout
Figure 4.6 Circulation Distribution over Rectangular Wing with Linear Washout
0.90
0.95
1.00
1.05
1.10
1.15
1.20
8 16 24 32 40 48 56 64
Nor
mal
ized
Fou
rier
Coe
ffic
ient
Number of Panels
A1
A3
A5
0.00
0.20
0.40
0.60
0.80
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion
Dis
trib
utio
n, Γ
/Γm
ax
Spanwise Location, y/b
8 Panels16 Panels32 Panels64 Panels
A1
A2
A3

37
4.1.2 Numerical Integration Subdivisions
The integration was performed using Simpson’s rule over the majority of the wing, with a
simplification to the Trapezoidal rule across the discontinuity to avoid evaluating the integrand at
the discontinuity, as discussed in Chapter 3. Initial runs were made with 200, 300, 400, and 500
subdivisions within each panel over the linearly washed-out and tapered wing. It was noted that
these cases required an excessive amount of time, without any difference in the Fourier
coefficients. As such, it was determined that significantly fewer subdivisions were needed than
first believed.
Simulations were then run with 20, 50, and 100 subdivisions per panel. As expected, the
runs took significantly less time. Minimal increase in the time for the simulation was noted
between the 20- and 50-subdivision cases. The difference between the analytical and numerical
solutions in the Fourier coefficients was seen to be less than 0.1% for all coefficients. For most
Fourier coefficients, the difference was significantly less. A minimal increase in accuracy
between the 20- and 50-subdivision cases was noted, but a negligible increase in accuracy was
obtained when 100 subdivisions were used.
Due to the minimal increase in computational time, it was determined that using 50
subdivisions per panel was beneficial as the behavior of the circulation distribution was unknown
for non-planar geometries.
4.2 Wing with Dihedral
4.2.1 Effect of Aspect Ratio
The results of running 3 cases of a flat wing and the same wings with 6 degrees of
dihedral at aspect ratios of 6, 10, and 14 showed the classical trends of aspect ratio to be
insensitive to dihedral. The three cases run were of a rectangular wing, a wing with 50% linear

38
taper, and a wing with 50% linear taper and 2 degrees of linear washout. Figure 4.7 parts (a) and
(b) present the lift-curve for the rectangular wing for the flat and dihedral cases, respectively.
The trends showed that an increase of aspect ratio corresponded to an increase of lift-curve slope.
Additionally, the percentage increase of the lift-curve slope due to increase of aspect ratio
remained constant between flat and dihedral cases.
Figure 4.8 displays the representative drag polars for the rectangular wing. An increase
in aspect ratio resulted in a decrease in induced drag. Similar plots for the wings with taper and
washout were not included as the form was the same as for the rectangular wing. In Figure 4.9
the span efficiency factor, e, is plotted for all three wings at both . The offset
between the solid ( ) and dashed ( ) series shows the constant decrease in e,
regardless of aspect ratio and wing geometry. A similar constant offset is seen in the lift-curve
slope in Figure 4.10. It should be noted that the lift-curve slope is independent of washout,
causing the plots of the tapered wing without and with washout to lie on top of each other.
Geometric and aerodynamic twist alter , which is combined with when solving
Equation 3.10. Washout does not affect directly the integral in the governing equation.
As the trends of aspect ratio were found to be independent of dihedral, the dihedral cases
were run at a single aspect ratio .

39
Figure 4.7 (a) Effect of Aspect Ratio on Lift-Curve Slope of Flat Rectangular Wing
Figure 4.7 (b) Effect of Aspect Ratio on Lift-Curve Slope of Rectangular Wing with 6 Degrees of Dihedral
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 1 2 3 4 5 6 7 8 9 10
Lift
Coe
ffic
ient
, CL
Angle of Attack, α (deg)
AR = 6AR = 10AR = 14
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 1 2 3 4 5 6 7 8 9 10
Lift
Coe
ffic
ient
, CL
Angle of Attack, α (deg)
AR = 6
AR = 10
AR = 14
AR = 6 AR = 10 AR = 14
AR = 6 AR = 10 AR = 14

40
Figure 4.8 (a) Effect of Aspect Ratio on Flat Rectangular Wing
Figure 4.8 (b) Effect of Aspect Ratio on Rectangular Wing with 6 Degrees of Dihedral
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Indu
ced
Dra
g C
oeff
icie
nt, C
D
Lift Coefficient, CL
AR = 6
AR = 10
AR = 14
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Indu
ced
Dra
g C
oeff
icie
nt, C
D
Lift Coefficient, CL
AR = 6
AR = 10
AR = 14
AR = 6 AR = 10 AR = 14
AR = 6 AR = 10 AR = 14

41
Figure 4.9 Comparison of Span Efficiency Factor, e, for Wings with Varying Aspect Ratios
Figure 4.10 Comparison of Lift-Curve Slope, CLα, for Wings with Varying Aspect Ratios
0.86
0.88
0.90
0.92
0.94
0.96
0.98
1.00
4 6 8 10 12 14 16
Span
Eff
icie
ncy
Fact
or, e
Aspect Ratio, AR
Flat Rectangular WingRectangular Wing with 6 deg DihedralFlat Tapered WingTapered Wing with 6 deg DihedralFlat Washed out and Tapered WingWashed out and Tapered Wing with 6 deg Dihedral
0.070
0.075
0.080
0.085
0.090
0.095
4 6 8 10 12 14 16
Lift
-Cur
ve S
lope
, CL α
(deg
-1)
Aspect Ratio, AR
Flat Rectangular WingRectangular Wing with 6 deg DihedralFlat Tapered WingTapered Wing with 6 deg DihedralFlat Washed out and Tapered WingWashed out and Tapered Wing with 6 deg Dihedral
42
4.2.2 Effect of Dihedral on an Elliptically Loaded Wing
It was found by Prandtl1 that an elliptically-loaded wing has the minimum induced drag
of any flat planform. Therefore, it was believed important to investigate the impact of dihedral
on an elliptically-loaded wing. The loading was produced using a wing of elliptical planform.
The first, and most notable characteristic of the results from the numerical solution was
that the wing with dihedral retained only one term in the Fourier series. This is similar to a flat
wing. Recalling Equation 3.1, the induced drag of the wing is:
∑
(3.1)
The reader is reminded that the minimum induced drag occurs when the only non-zero
coefficient in the series is A1. The result therefore showed that an elliptically loaded wing with
dihedral remains the most efficient planform.
While the minimum drag for a wing with dihedral exists with an elliptical load, adding
dihedral was found to decrease the lift-curve slope and increase the induced drag compared to
the flat wing. This decrease of lift-curve slope and span efficiency factor is due to the angular
offset between the local wing normal direction, , and lift direction (z-axis), as seen in Figure
3.2. In order to produce an equivalent lift to the flat wing, a wing with dihedral must generate
more load normal to the wing surface, so that the component of the normal force in the lift
direction is equivalent to that produced by the flat wing. The remaining portion of the normal
force given by:
(4.1)
produces additional drag without providing additional lift. The deviation of lift-curve slope from
that of the flat wing is shown in Table 4.1 and Figure 4.11.
43
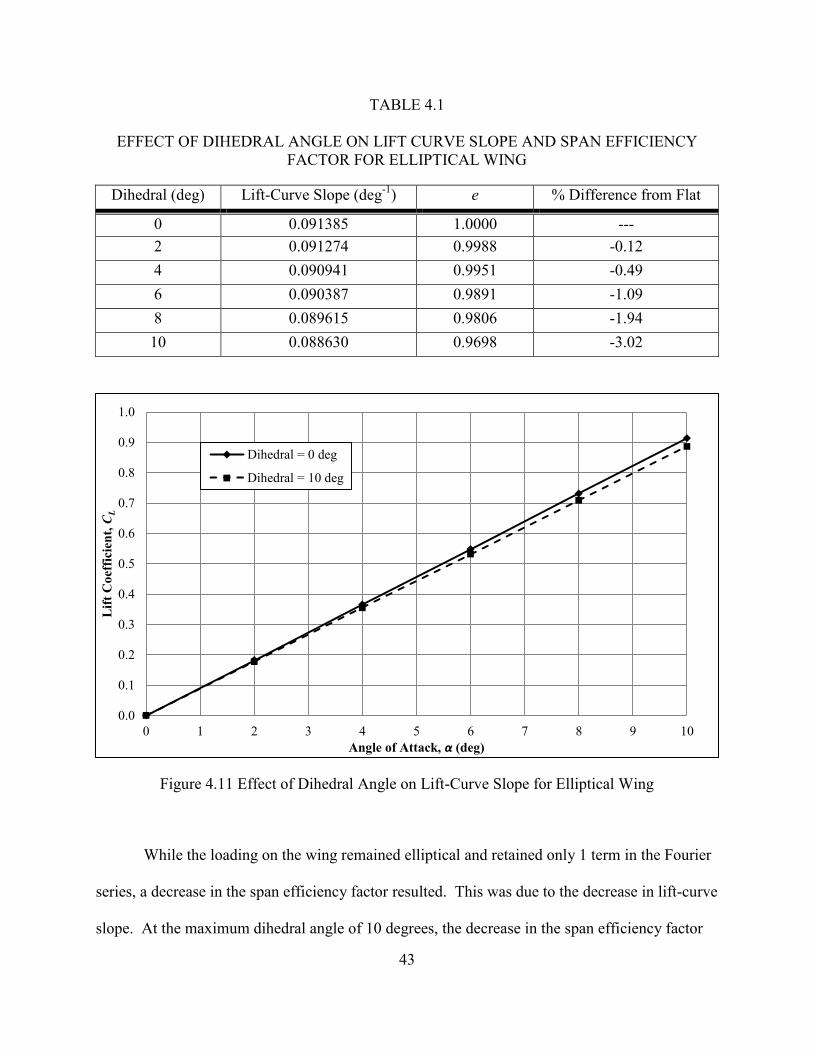
TABLE 4.1
EFFECT OF DIHEDRAL ANGLE ON LIFT CURVE SLOPE AND SPAN EFFICIENCY FACTOR FOR ELLIPTICAL WING
Dihedral (deg) Lift-Curve Slope (deg-1) e % Difference from Flat
0 0.091385 1.0000 --- 2 0.091274 0.9988 -0.12 4 0.090941 0.9951 -0.49 6 0.090387 0.9891 -1.09 8 0.089615 0.9806 -1.94 10 0.088630 0.9698 -3.02
Figure 4.11 Effect of Dihedral Angle on Lift-Curve Slope for Elliptical Wing
While the loading on the wing remained elliptical and retained only 1 term in the Fourier
series, a decrease in the span efficiency factor resulted. This was due to the decrease in lift-curve
slope. At the maximum dihedral angle of 10 degrees, the decrease in the span efficiency factor
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0 1 2 3 4 5 6 7 8 9 10
Lift
Coe
ffic
ient
, CL
Angle of Attack, α (deg)
Dihedral = 0 deg
Dihedral = 10 deg

44
was 3.02%. Table 4.1 shows the decrease in the span efficiency factor; Figure 4.12 displays the
drag polar of the flat and elliptical wings. The percentage decrease in span efficiency factor was
the same as the percentage decrease in the lift-curve slope.
Between Table 4.1 and Figure 4.12 it is clear that the drag penalty increases more quickly
at higher angles of dihedral. Using a quadratic trendline, the relationship between span
efficiency factor and dihedral was modeled as:
𝑒 (4.2)
It is important to note that while increased dihedral causes an increase in induced drag, it
was less than 1 drag count difference at low values. That is to say that dihedral has a more
significant effect on the lift-curve slope than on the induced drag of the wing at cruise
conditions.
The work performed by Cone14 showed minimum induced drag to be a result of constant
normal-downwash across the wing. The retention of a single term of the Fourier series for an
elliptically-loaded wing at a non-zero dihedral angle implies two possible conclusions. First,
because the offset between and the z-axis is constant in magnitude across the wing, i.e.
constant dihedral angle , simple dihedral may preserve the constant downwash across the wing.
The second possibility is that the induced thrust due to the bound vortex may have a larger
influence on the result than anticipated.

45
Figure 4.12 Effect of Dihedral on Drag Coefficient of Elliptical Wing
Since the elliptically-loaded wing provided the minimum drag for both flat and dihedral
cases, it was used as a benchmark with which to compare the remaining dihedral cases.
Differences from these results for the elliptically-loaded wing showed a deviation from the
optimum at each dihedral angle.
4.2.3 Effect of Dihedral on Twist
To consider the effect of dihedral on a twisted rectangular wing, cases were run for 1, 2,
and 3 degrees of linear washout over the span. As was mentioned in Section 4.2.1, twist did not
affect the lift-curve slope. The decrease in lift-curve slope for a wing with washout was the same
as for an equivalent planform with no washout. As a result this section focuses solely on the
effect of dihedral on the induced drag of twisted wings.
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00
Dra
g C
oeff
icie
nt, C
D
Lift Coefficient, CL
Dihedral = 0 deg
Dihedral = 10 deg

46
The washout on the wing produces a change in circulation over the wing as angle of
attack changes. This means that the span efficiency factor of each wing changes with angle of
attack. Figure 4.13 shows the effect that the angle of attack has on the span efficiency factor of a
wing with 1 degree of washout. At angles lower than the washout, the span efficiency factor of
the wing is significantly decreased due to the generation of negative lift on the outboard section
of the wing. It is also clear that this relationship between angle of attack and span efficiency
factor is independent of the dihedral angle of the wing.
To isolate the effect of dihedral on the trends in span efficiency factor due to washout,
data was obtained at three lift coefficients, . The results are shown in
Figures 4.14, 4.15, and 4.16. As can be seen in Figure 4.14, at the lowest lift coefficient, the
wing with 1 degree washout was the most efficient of the twisted wings, with span efficiency
factor just lower than the elliptical wing at all dihedral angles. As the lift coefficient increased,
span efficiency factor was higher for wings with more washout. This can be seen in Figures 4.15
and 4.16.

47
Figure 4.13 Effect of Angle of Attack, α, on Span Efficiency Factor, e, of a Rectangular Wing with 1 Degree of Washout
Figure 4.14 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.1
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0 1 2 3 4 5 6 7 8 9 10
Span
Eff
icie
ncy
Fact
or, e
Angle of Attack, α (deg)
Dihedral = 0 deg
Dihedral = 4 deg
Dihedral = 10 deg
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
0 1 2 3 4 5 6 7 8 9 10
Span
Eff
icie
ncy
Fact
or, e
Dihedral, ϕ (deg)
EllipticalNo Twist1 Degree Washout2 Degree Washout3 Degree Washout

48
Figure 4.15 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.3
Figure 4.16 Effect of Dihedral Angle, , on Span Efficiency Factor, e, for Wings at CL = 0.5
0.850
0.875
0.900
0.925
0.950
0.975
1.000
0 1 2 3 4 5 6 7 8 9 10
Span
Eff
icie
ncy
Fact
or, e
Dihedral, ϕ (deg)
EllipticalNo Twist1 Degree Washout2 Degree Washout3 Degree Washout
0.850
0.875
0.900
0.925
0.950
0.975
1.000
0 1 2 3 4 5 6 7 8 9 10
Span
Eff
icie
ncy
Fact
or, e
Dihedral, ϕ (deg)
EllipticalNo Twist1 Degree Washout2 Degree Washout3 Degree Washout

49
Regardless of lift coefficient, for dihedral angles between and the
difference in e was approximately 3%. However, for wings with large washout, dihedral
appeared to have less effect on the span efficiency factor of wings at lower lift coefficients.
Table 4.2 shows a summary of the decreases seen in e for each planform at compared to
their respective flat values.
TABLE 4.2
DECREASE IN SPAN EFFICIENCY FACTOR FOR WINGS WITH COMPARED TO FLAT
Wing Geometry CL = 0.1 CL = 0.3 CL = 0.5
Elliptical -3.02% -3.02% -3.02% Rectangular 0° Washout -2.93% -3.02% 3.01% Rectangular 1° Washout -2.82% -3.05% -3.06% Rectangular 2° Washout 2.26% 3.15% -3.06% Rectangular 3° Washout -1.66% -2.95% -3.07% Rectangular 5° Washout -0.62% -2.57% -3.08%
To further examine the effect of the dihedral on twist, a wing with 5 degrees of washout
was considered. At this wing showed a decrease of e of 0.7% at ; the span
efficiency factor saw a decrease of 2.67% at . It is important to note that while the 5
degree washout case was more insensitive to the effects of dihedral, it had a much lower span
efficiency factor when compared to the other cases. For , the 5 degree washout case had
𝑒 .
For it was seen that the wings of higher washout (3- and 5- degree cases) had
angles of attack lower than their washout angles. This means that they were generating negative
lift towards the wingtips. The normalized circulation distributions for the 3- and 5-degree
washout cases were plotted with the elliptical distribution in Figure 4.17 parts (a) and (b) for

50
and respectively. What can be seen is the slight decrease of negative
circulation at the wingtips when = 10°. Producing less negative circulation, and therefore lift,
decreases the amount of drag being produced without corresponding lift. It should be noted that
there is an increase in maximum circulation between flat and dihedral cases of between 0.5% and
1% for the washout cases.
In order eliminate the negative lift at the wingtips, the angle of attack was increased. The
spanwise circulation distribution was examined at . The results are plotted in Figure
4.18 parts (a) and (b) for and respectively. As is apparent from the plot, the
difference between flat and dihedral cases was primarily the magnitude of the circulation
generated; higher angles of dihedral required slightly more circulation to create the same lift.
Normalizing the circulation over the wing allowed comparisons of the character of the
spanwise distribution. The normalized spanwise circulation can be seen in Figure 4.19 (a) and
(b). There is no significant difference in the shape of the distributions. When the lines are
placed on the same plot, the only visible difference was in the case of 3 degrees of washout,
which had a slight offset in the slope of the distribution outboard of
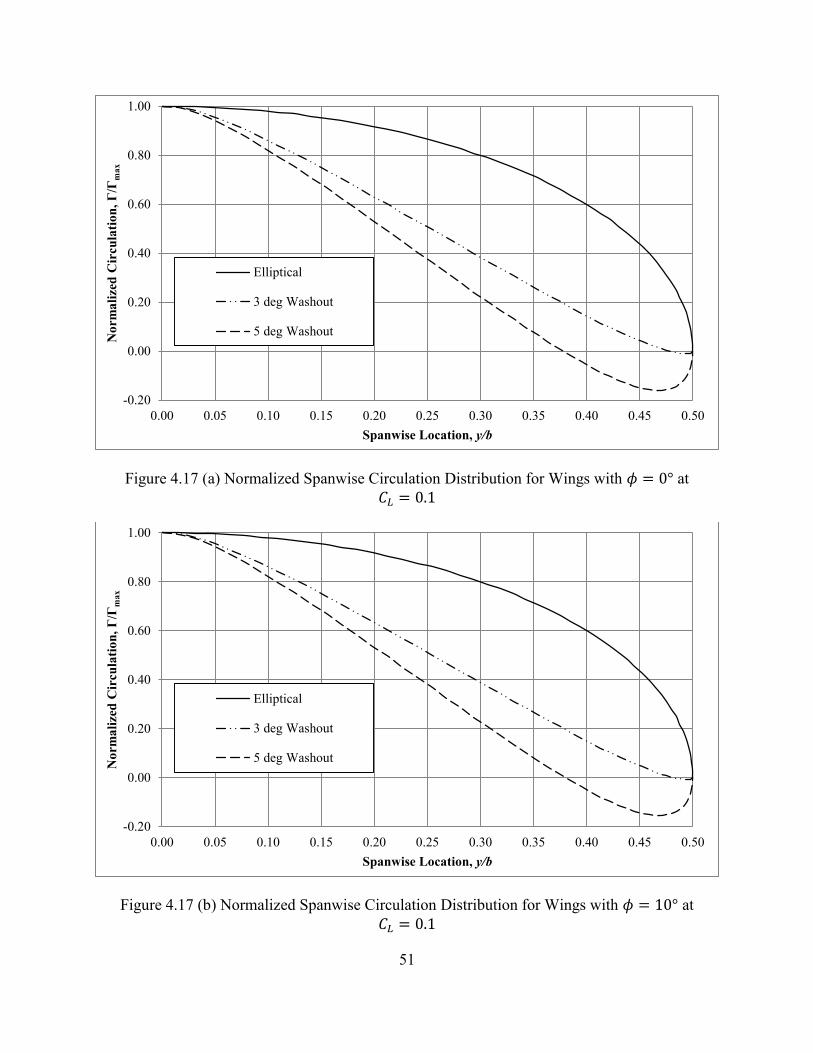
51
Figure 4.17 (a) Normalized Spanwise Circulation Distribution for Wings with at
Figure 4.17 (b) Normalized Spanwise Circulation Distribution for Wings with at
-0.20
0.00
0.20
0.40
0.60
0.80
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion,
Γ/Γ
max
Spanwise Location, y/b
Elliptical
3 deg Washout
5 deg Washout
-0.20
0.00
0.20
0.40
0.60
0.80
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion,
Γ/Γ
max
Spanwise Location, y/b
Elliptical
3 deg Washout
5 deg Washout

52
Figure 4.18 (a) Spanwise Circulation Distribution for Wings with at
Figure 4.18 (b) Spanwise Circulation Distribution for Wings with at
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Cir
cula
tion,
Γ
Spanwise Location, y/b
Elliptical
Untwisted
1 deg Washout
2 deg Washout
3 deg Washout
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Cir
cula
tion,
Γ
Spanwise Location, y/b
Elliptical
Untwisted
1 deg Washout
2 deg Washout
3 deg Washout

53
Figure 4.19 (a) Normalized Spanwise Circulation Distribution for Wings with at
Figure 4.19 (b) Normalized Spanwise Circulation Distribution for Wings with at
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion,
Γ/Γ
max
Spanwise Location, y/b
EllipticalUntwisted1 deg Washout2 deg Washout3 deg Washout
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion,
Γ/Γ
max
Spanwise Location, y/b
EllipticalUntwisted1 deg Washout2 deg Washout3 deg Washout

54
4.2.4 Effect of Dihedral on Taper
Data was obtained for linear taper with Ct/Cr = 0.75, 0.50, and 0.25. As with the case of
twist and elliptical wings, classical trends held true for tapered wings with dihedral. Figure 4.20
shows the effect of dihedral on lift-curve slope. The penalty of dihedral on lift-curve slope was
seen to be 2.96% for tapered wings, the same as for an untapered wing. This was a slightly
smaller penalty than the 3.02% experienced by the elliptical wing. The classical trend of an
increase in lift curve slope as tip chord decreases was unaffected by dihedral angle. The trend
showed only a slight increase in lift-curve slope between Ct/Cr = 0.5and Ct/Cr = 0.25. Further
analysis showed the steepest lift-curve slope resulted from a wing with Ct/Cr ≈ 0.3, independent
of dihedral angle.
As with the lift-curve slope, the trends of span efficiency factor were the same for wings
with dihedral and flat wings, with optimal span efficiency factor seen at Ct/Cr≈ 0.375.
Moreover, the span efficiency factor of the wing was seen to be independent of dihedral angle, as
seen in Figure 4.21.
The results for flat tapered wings agree well with those seen in McCormick18 and
Bridges.19 McCormick18 and Bridges19 used the induced drag factor, , for plots regarding
induced drag. The relationship between e, and is:
𝑒 ( ) (4.3)
Furthermore, Bridges19 used the lift-curve slope parameter, , for plotting the trends of lift curve
slope, where:
(
) (4.4)
With a being the lift-curve slope of the wing and a0 being the lift-curve slope of the airfoil.

55
Figure 4.20 Effect of Dihedral Angle on Lift-Curve Slope of Untwisted, Tapered Wings
Figure 4.21 Effect of Dihedral Angle on Span Efficiency Factor of Untwisted, Tapered Wings
0.085
0.086
0.087
0.088
0.089
0.090
0.091
0.092
0 1 2 3 4 5 6 7 8 9 10
Lift
Coe
ffic
ient
Slo
pe, C
Lα (d
eg-1
)
Dihedral, ϕ (deg)
Elliptical WingRectangular WingCt = 0.75 CrCt = 0.5 CrCt = 0.25 Cr
0.850
0.875
0.900
0.925
0.950
0.975
1.000
0 1 2 3 4 5 6 7 8 9 10
Span
Eff
icie
ncy
Fact
or, e
Dihedral, ϕ (deg)
Rectangular Wing
Ct=0.75Cr
Ct=0.50Cr
Ct=0.25Cr
Ct = 0.75Cr Ct = 0.5Cr Ct = 0.25Cr
Ct = 0.75Cr
Ct = 0.5Cr
Ct = 0.25Cr

56
4.3 Deformable Wing
The shift from rigid wing geometries to deformable ones required a significant shift in the
way the problem was considered. For rigid geometries, the formulation was independent of wing
area and only used non-dimensional quantities for input and output. The deformable wing
required forces to calculate the deflection of the wing. These forces were found from the
coefficients produced by the lifting line solution.
Considering the relationship between forces and coefficients,
(4.5)
it was understood that dynamic pressure and planform area needed to be held constant across the
investigation. Additionally, the stiffness of the wing needed to be selected, as varying this would
also have a direct relationship to the deformation.
As it was seen in the dihedral analysis, 6 degrees of dihedral provided deviations from
flat geometries of less than 1 percent in aerodynamic coefficients, it was decided that the target
value of EI, the flexural rigidity, would provide tip deflections equal to and greater than 6
degrees of dihedral.
For consistency, the planforms used for deformable wings were the same as for dihedral:
elliptical wing, rectangular wing, and linearly tapered wings. The area was decided as that of an
elliptical wing with Cr = 5 ft. This resulted in b = 39.268 ft and S = 154.2 ft2 for AR = 10. The
specifications of all the wings can be found in Table 4.3. By varying the root and tip chords of
the linearly tapered wings, the area, aspect ratio, and span of the wings were able to be held
constant.
An initial value of EI = 1.5x106 lbf-ft2 was chosen through trial and error. This stiffness
provided wingtip deflections ranging from approximately 10% to 40% of the semi-span for

57
angles of attack between 2 degrees and 10 degrees on an elliptical wing using the geometry in
Table 4.3. These deflections were similar to 6 degrees of dihedral at low angles of attack and
were significantly larger at higher angles of attack. In further investigations, EI was also tapered
25% and 50% linearly from the center of the wing. To demonstrate the relationship between
aspect ratio and wing bending, 3 rectangular wings with area 150 ft2 and aspect ratios of 6, 10,
and 15 were run at approximately the same lift coefficient. Due to bending, the lift coefficient
was not exactly the same, but varied less than 0.5% from an average value of CL = 0.370. It was
hypothesized that aspect ratio would have a direct correlation with deflection as an increase of
aspect ratio elongated the wing for the same area, providing a longer moment arm for the
bending. The resultant bending, normalized to span is seen in Figure 4.22. The hypothesis that
aspect ratio was directly correlated with wing bending was supported. With this evidence, the
aspect ratio of 10 used in the dihedral analysis was maintained in the analysis of the deformable
wings.
TABLE 4.3
WING GEOMETRIES USED IN DEFORMABLE WING INVESTIGATIONS
Description Span Root Chord Tip Chord Area Elliptical 39.268 5.000 N/A 154.205
Rectangular Wing 39.268 3.927 3.927 154.205 Ct/Cr = 0.75 39.268 4.488 3.366 154.200 Ct/Cr = 0.50 39.268 5.236 2.618 154.198 Ct/Cr = 0.25 39.268 6.283 1.571 154.198

58
Figure 4.22 Normalized Deflection of Rectangular Wing with S = 150 ft2 and EI = 1.5x106 at q = 50 psf with Varying Aspect Ratios
4.3.1 Deflection
As mentioned previously, deflections of 10% to 40% percent were seen at the wingtip for
the elliptical case. These deflections were consistent across all wing geometries considered
within approximately 2.3% for constant EI. This corresponds to less than 0.3 ft difference
between the geometries at an angle of attack of 10 degrees. The rectangular wing, which
produced more circulation near the wingtip, deflected more than the elliptical wing. However,
the 75% linearly tapered wing, which produced less circulation near the wingtip, deflected less.
In addition to agreement in overall wingtip deflection, the resulting shape of the planforms in the
yz-plane was similar for each angle of attack. The resulting shape of the elliptical wing at
varying angles of attack can be seen in Figure 4.23.
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Def
lect
ion,
z/b
Spanwise Location, y/b
AR 6
AR 10
AR 15
AR = 6
AR = 10
AR = 14

59
More important than the wingtip deflection distance is the angle at which the wing
deflects. When the circulation over the wing is integrated to find the lift, the contribution that a
panel makes to the overall lift is reduced by . With this in mind, the panel angles were
plotted for the elliptical wing in Figure 4.24. As seen in Figure 4.24, significant bending stops
outboard of 70% semi-span, with the last 30% at roughly the same angle to vertical.
Figure 4.23 Deflection of an Elliptical Wing with EI = 0.15x106 lbf-ft2
The initial angle of attack sweep was helpful for understanding the trends, but was too
coarse for comparing the effect of the various planforms on the deflection. In order to provide a
more isolated comparison of the effect of wing loading on the deflection, data was gathered at
finer angle of attack increments to provide comparisons of wing deflection at constant lift
coefficient.
0.00
0.05
0.10
0.15
0.20
0.25
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Ver
tical
Loc
atio
n, z/
b
Spanwise Location, y/b
AoA = 2, CL = 0.183
AoA = 4, CL = 0.366
AoA = 6, CL = 0.548
AoA = 8, CL = 0.731
AoA = 10, CL = 0.914
α = 2° CL = 0.183 α = 4° CL = 0.366 α = 6° CL = 0.548 α = 8° CL = 0.731 α = 10° CL = 0.914

60
Figure 4.24 Angle of Local Normal to Vertical for Elliptical Wing with EI = 0.15x106 lbf-ft2
Due to the deformation of the wing, it was not possible to find the angle of attack for a
certain lift-coefficient through interpolation. Instead an iterative process was used to set the
angle of attack such that the wings produced lift coefficients of 0.25, 0.5, and 0.70 with a
tolerance of less than 0.01%.
Figures 4.25 through 4.27 show the spanwise deviation from the elliptical deformation
for each of the planforms at CL = 0.25, 0.50, and 0.70 respectively. From these figures it was
seen that the deviations from the elliptical planform increased as the lift coefficient increased and
that the deviations increased with increasing semi-span location.
Figures 4.28 through 4.30 display the difference from the elliptical wing in local normal
angle for each of the planforms at the previously stated lift coefficients. As can be seen in
Figures 4.28 through 4.30, the difference increased with growing angle of attack, similar to that
seen in Figures 4.25 through 4.27. However the overall percentage difference of panel angle was
0
5
10
15
20
25
30
35
40
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Win
g D
efle
ctio
n A
ngle
, ϕ (d
eg)
Wing Fixed Spanwise Location, s/b
AoA = 2 deg, CL = 0.183AoA = 4 deg, CL = 0.366AoA = 6 deg, CL = 0.548AoA = 8 deg, CL = 0.731AoA = 10 deg, CL = 0.914
α = 2° CL = 0.183 α = 4° CL = 0.366 α = 6° CL = 0.548 α = 8° CL = 0.731 α = 10° CL = 0.914

61
slightly larger than that of the panel displacement. Additionally, the deviations in angle
stabilized outboard of 70% semi-span. This indicated that the bending trends seen in the
elliptical wing were the same for all wings, i.e. significant bending occurs on the inboard 70% of
the wing.
To better understand the deviations and their relationship to the spanwise loading of the
wing, the circulation distribution over the wing was examined at all 3 lift coefficients. As the
deflection of the wing increased, the normalized circulation, , decreased away from the
center of the wing, for all planforms. The circulation distribution for CL = 0.7 is presented in
Figure 4.31 and the normalized circulation distribution in Figure 4.32 Most evident in Figure
4.31 is that the 75% linearly tapered wing produces a circulation distribution very similar to that
of a triangular loading, which produces the minimum root bending moment.
Figure 4.25 Deviations from Elliptical Wing Deflection at CL = 0.25 for Wings with EI = 0.15x106 lbf-ft2
-6%
-4%
-2%
0%
2%
4%
6%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Diff
eren
ce fr
om E
llipt
ical
Def
lect
ion
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered

62
Figure 4.26 Deviations from Elliptical Wing Deflection at CL = 0.50 for Wings with EI = 0.15x106 lbf-ft2
Figure 4.27 Deviations from Elliptical Wing Deflection at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2
-6%
-4%
-2%
0%
2%
4%
6%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Diff
eren
ce fr
om E
llipt
ical
Def
lect
ion
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered
-6%
-4%
-2%
0%
2%
4%
6%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Diff
eren
ce fr
om E
llipt
ical
Def
lect
ion
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered

63
Figure 4.28 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.25 for Wings with EI = 0.15x106 lbf-ft2
Figure 4.29 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.50 for Wings with EI = 0.15x106 lbf-ft2
-6%
-4%
-2%
0%
2%
4%
6%
8%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Loc
al N
orm
al D
iffer
ence
from
Elli
ptic
al
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered
-6%
-4%
-2%
0%
2%
4%
6%
8%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Loc
al N
orm
al D
iffer
ence
from
Elli
ptic
al
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered
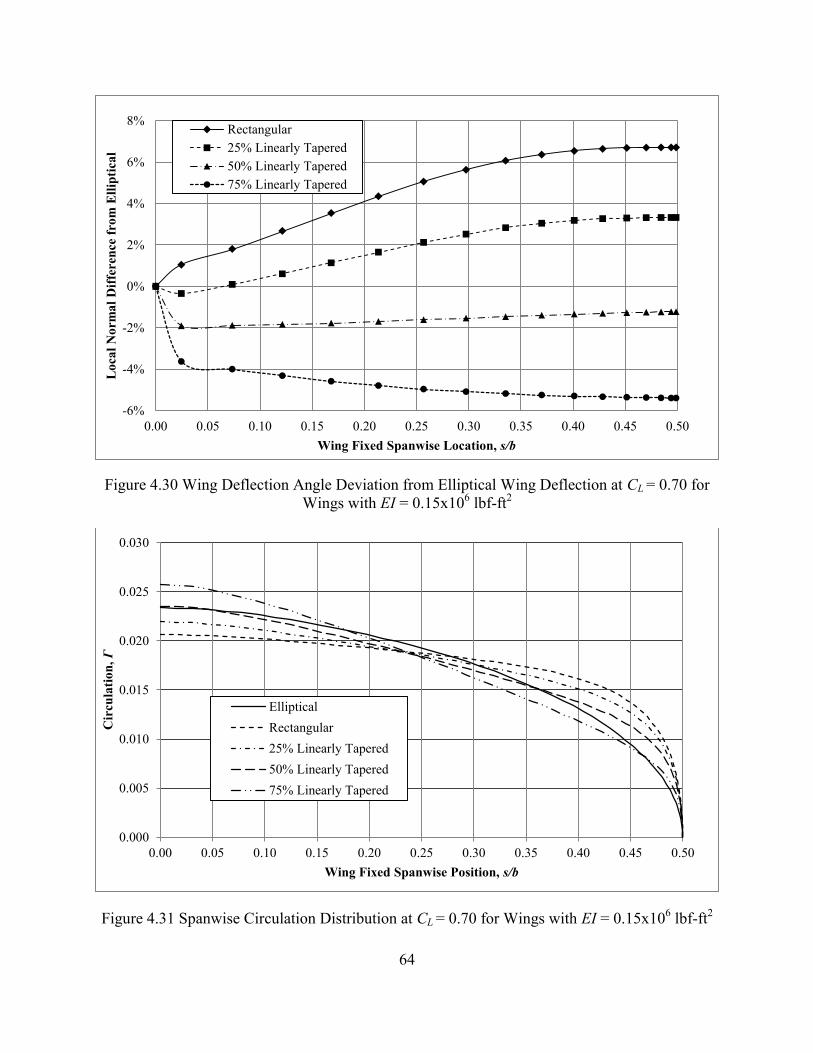
64
Figure 4.30 Wing Deflection Angle Deviation from Elliptical Wing Deflection at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2
Figure 4.31 Spanwise Circulation Distribution at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2
-6%
-4%
-2%
0%
2%
4%
6%
8%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Loc
al N
orm
al D
iffer
ence
from
Elli
ptic
al
Wing Fixed Spanwise Location, s/b
Rectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Cir
cula
tion,
Γ
Wing Fixed Spanwise Position, s/b
EllipticalRectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered
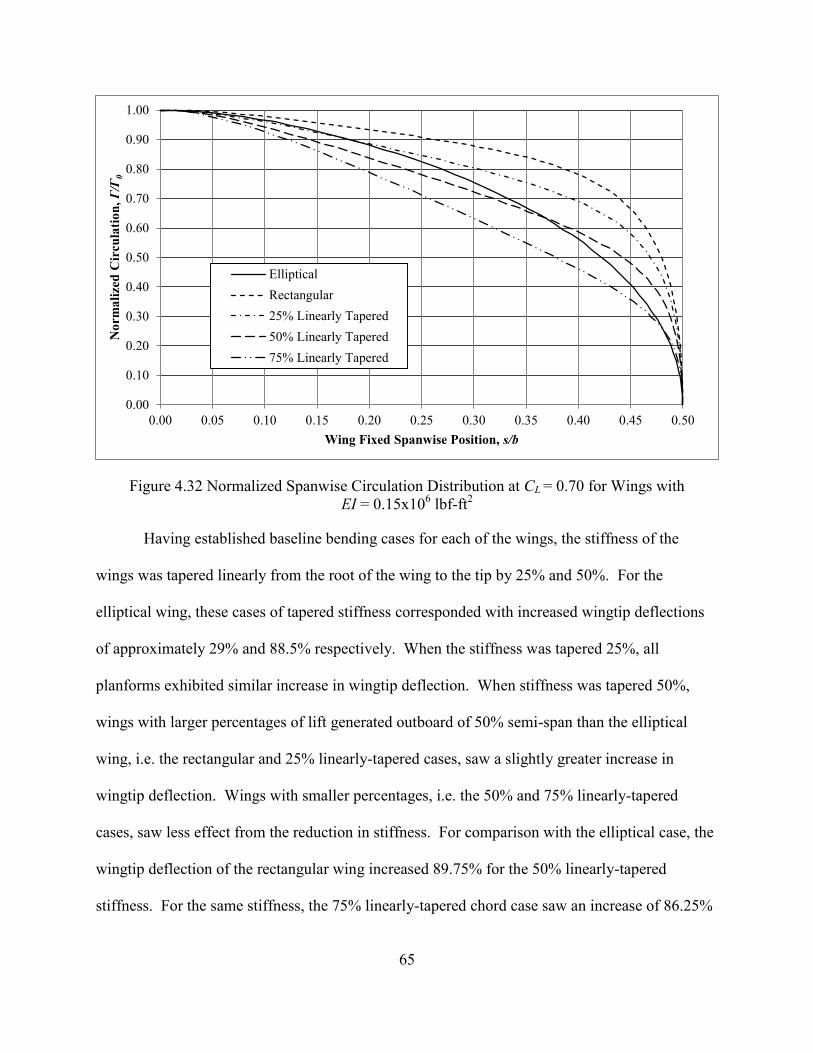
65
Figure 4.32 Normalized Spanwise Circulation Distribution at CL = 0.70 for Wings with EI = 0.15x106 lbf-ft2
Having established baseline bending cases for each of the wings, the stiffness of the
wings was tapered linearly from the root of the wing to the tip by 25% and 50%. For the
elliptical wing, these cases of tapered stiffness corresponded with increased wingtip deflections
of approximately 29% and 88.5% respectively. When the stiffness was tapered 25%, all
planforms exhibited similar increase in wingtip deflection. When stiffness was tapered 50%,
wings with larger percentages of lift generated outboard of 50% semi-span than the elliptical
wing, i.e. the rectangular and 25% linearly-tapered cases, saw a slightly greater increase in
wingtip deflection. Wings with smaller percentages, i.e. the 50% and 75% linearly-tapered
cases, saw less effect from the reduction in stiffness. For comparison with the elliptical case, the
wingtip deflection of the rectangular wing increased 89.75% for the 50% linearly-tapered
stiffness. For the same stiffness, the 75% linearly-tapered chord case saw an increase of 86.25%
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Nor
mal
ized
Cir
cula
tion,
Γ/Γ
0
Wing Fixed Spanwise Position, s/b
EllipticalRectangular25% Linearly Tapered50% Linearly Tapered75% Linearly Tapered

66
The deflections of the elliptical case for varying EI are seen in Figure 4.33. It appeared
that the deflections closer to the wing root showed larger increases than those at the wingtip.
This observation was confirmed by comparing the deflections at the endpoints of each panel to
those seen with constant stiffness. The increase in displacement of the panel endpoints observed
on the elliptical wing is presented in Figure 4.34. The magnitude of the difference in endpoint
deflections as compared to constant flexural rigidity decreased slightly as the distance from the
mid-span increased. The trend seen on the elliptical wing was 5.5% more deflection inboard
than at the wingtips for 25% decrease in stiffness and 7% for a 50% decrease. The same trend
was seen in the other planforms as well, with magnitudes comparable to the elliptical wing.
Figure 4.33 Deflection of Elliptical Wing at CL = 0.5 with Constant and Linearly Tapered Stiffness
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Ver
tical
Loc
atio
n, z/
b
Spanwise Location, y/b
Constant EI
25% Linearly Tapered EI
50% Linearly Tapered EI
Constant EI
25% Linearly Tapered EI
50% Linearly Tapered EI
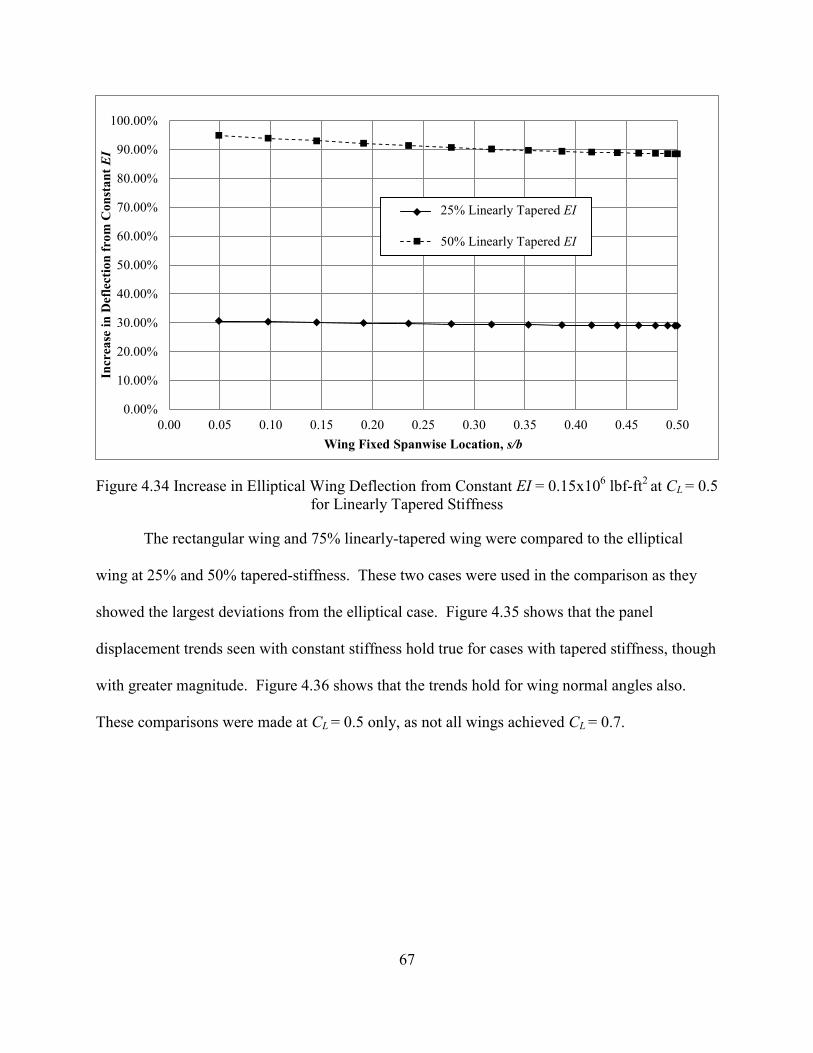
67
Figure 4.34 Increase in Elliptical Wing Deflection from Constant EI = 0.15x106 lbf-ft2 at CL = 0.5 for Linearly Tapered Stiffness
The rectangular wing and 75% linearly-tapered wing were compared to the elliptical
wing at 25% and 50% tapered-stiffness. These two cases were used in the comparison as they
showed the largest deviations from the elliptical case. Figure 4.35 shows that the panel
displacement trends seen with constant stiffness hold true for cases with tapered stiffness, though
with greater magnitude. Figure 4.36 shows that the trends hold for wing normal angles also.
These comparisons were made at CL = 0.5 only, as not all wings achieved CL = 0.7.
0.00%
10.00%
20.00%
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Incr
ease
in D
efle
ctio
n fr
om C
onst
ant E
I
Wing Fixed Spanwise Location, s/b
25% Linearly Tapered EI
50% Linearly Tapered EI
25% Linearly Tapered EI
50% Linearly Tapered EI

68
Figure 4.35 Deviations from Elliptical Wing Deflection at CL = 0.5 for Wings with Linearly Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
Figure 4.36 Wing Deflection Angle Deviation from Elliptical Wing at CL = 0.5 for Wings with Linearly Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
-8.00%
-6.00%
-4.00%
-2.00%
0.00%
2.00%
4.00%
6.00%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Diff
eren
ce fr
om E
llipt
ical
Def
lect
ion
Wing Fixed Spanwise Location, s/b
Rectangular, 25% Tapered EI
Rectangular, 50% Tapered EI
75% Linearly Tapered Chord, 25% Tapered EI
75% Linearly Tapered Chord, 50% Tapered EI
-8.00%
-6.00%
-4.00%
-2.00%
0.00%
2.00%
4.00%
6.00%
8.00%
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
Loc
al N
orm
al D
iffer
ence
from
Elli
ptic
al
Wing Fixed Spanwise Location, s/b
Rectangular, 25% Tapered EI
Rectangular, 50% Tapered EI
75% Linearly Tapered Chord, 25% Tapered EI
75% Linearly Tapered Chord, 50% Tapered EI
Rectangular, 25% Tapered EI Rectangular, 50% Tapered EI
75% Linearly Tapered Chord, 25% Tapered EI 75% Linearly Tapered Chord, 50% Tapered EI
Rectangular, 25% Tapered EI
Rectangular, 50% Tapered EI 75% Linearly Tapered Chord, 25% Tapered EI
75% Linearly Tapered Chord, 50% Tapered EI

69
4.3.2 Effects on Lift Coefficient and Span Efficiency Factor
Section 4.2 provided insight into lift and drag penalties due to small dihedral angles on
the wing. These penalties were approximately 3% at for both lift and span efficiency
factor. Additionally, these penalties were independent of angle of attack when the wing had no
twist. When the rigid geometry was replaced with a deformable wing, the deflections seen were
significantly larger and resulted in lift and drag penalties that were dependent on angle of attack.
At higher angles of attack, the penalties were greater than those for rigid wings.
As can be seen in Figure 4.37 (a), the lift coefficient penalty due to the deformation for
the elliptical wing was 0.4% for constant stiffness at , but 10.1% at . Similarly,
from Figure 4.36 (b), the span efficiency factor penalty was only 0.1% for and 3.6% at
. For the cases of tapered stiffness, the ultimate penalty in lift coefficient increased
significantly, while the penalty at remained less than 1.2%; the penalty in span efficiency
factor was only 0.4% at and 22.7% at .
An interesting artifact of the deflection was the quasi-stall created for wings with 50%
linearly-tapered stiffness, seen in Figure 4.37 (a) for the elliptical wing. This feature was present
for all planforms at an angle of attack of 10 degrees.

70
Figure 4.37 (a) Lift Coefficient for Deformable Elliptical Wing with Root EI = 0.15x106 lbf-ft2
Figure 4.37 (b) Span Efficiency Factor for Deformable Elliptical Wing with Root EI = 0.15x106 lbf-ft2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5 6 7 8 9 10
Lift
Coe
ffic
ient
, CL
Angle of Attack, α (deg)
Non-Deformable FlatConstant EI25% Tapered EI50% Tapered EI
0.75
0.80
0.85
0.90
0.95
1.00
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00
Span
Eff
icie
ncy
Fact
or, e
Lift Coefficient, CL
Non-Deformable FlatConstant EI25% Tapered EI50% Tapered EI
Non-Deformable Flat Constant EI 25% Linearly Tapered EI 50% Linearly Tapered EI
Non-Deformable Flat Constant EI 25% Linearly Tapered EI 50% Linearly Tapered EI

71
The penalty in lift coefficient for each of the planforms was similar, with approximately
10% lift loss at for constant stiffness and 37% loss for the 50% tapered case. Figure
4.38 shows the lift loss for each planform compared to a flat wing of the same geometry. Part (a)
of Figure 4.38 shows the case of constant stiffness, part (b) shows the case of 25% linearly-
tapered stiffness, and part (c) shows the case of 50% linearly-tapered stiffness. The reason for
the exaggerated effect on the 75% tapered chord case was not understood, but there was no
reason to disregard these results.
In all cases the deflection of the wing decreased the span efficiency factor. However, flat
planforms that generated lift further outboard, when compared to an elliptical wing, experienced
a smaller penalty.
Figure 4.38 (a) Decrease in Lift Coefficient Due to Wing Deflection for Constant EI = 0.15x106 lbf-ft2
-14%
-12%
-10%
-8%
-6%
-4%
-2%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Lift
Coe
ffic
ient
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered

72
Figure 4.38 (b) Decrease in Lift Coefficient Due to Wing Deflection for 25% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
Figure 4.38 (c) Decrease in Lift Coefficient Due to Wing Deflection for 50% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
-20%
-18%
-16%
-14%
-12%
-10%
-8%
-6%
-4%
-2%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Lift
Coe
ffic
ient
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered
-40%
-35%
-30%
-25%
-20%
-15%
-10%
-5%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Lift
Coe
ffic
ient
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered
73
This decrease in the effect on span efficiency factor was due to an effective twist in the
wing. If at a local position on the wing the deflection angle was , then the effective angle of
attack would be:
(4.6)
which would cause an effective twist angle in the model of:
( ) (4.7)
At low angles of attack, the deflection angles were relatively small, thereby minimizing the
effective twist in the model. As the angle of attack increased or the stiffness of the wing
decreased, the twist increased. The increased twist led to a reduction in circulation generated
near the wingtips. The reduction in circulation near the wingtips improved the shape of the
distribution for planforms that produced a greater percentage of lift nearer the wingtips as
compared to an elliptical wing. For a flat wing, this washout increased the span efficiency
factor. Due to the deformation, not all the force generated normal to the wing created lift, even
though it still created drag. This resulted in decreasing the span efficiency factor more than was
gained by the improvement of the circulation distribution.
The decrease in span efficiency factor for the various cases is seen in Figure 4.39. Part
(a) of Figure 4.39 shows the case of constant stiffness, part (b) shows the case of 25% linearly-
tapered stiffness, and part (c) shows the case of 50% linearly-tapered stiffness. As can be seen,
the elliptical case experienced the most significant decrease in span efficiency factor; the
rectangular wing experienced the least.

74
Figure 4.39 (a) Decrease in Span Efficiency Factor Due to Wing Deflection for Constant EI = 0.15x106 lbf-ft2
Figure 4.39 (b) Decrease in Span Efficiency Factor Due to Wing Deflection for 25% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
-6%
-5%
-4%
-3%
-2%
-1%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Spa
n E
ffic
ienc
y Fa
ctor
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered
-8%
-7%
-6%
-5%
-4%
-3%
-2%
-1%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Spa
n E
ffic
ienc
y Fa
ctor
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered

75
Figure 4.39 (c) Decrease in Span Efficiency Factor Due to Wing Deflection for 50% Linearly-Tapered Stiffness with Root EI = 0.15x106 lbf-ft2
-25%
-20%
-15%
-10%
-5%
0%
0 1 2 3 4 5 6 7 8 9 10
Dec
reas
e in
Spa
nwis
e E
ffic
ienc
y
Angle of Attack, α (deg)
Elliptical
Rectangular
25% Linearly Tapered
50% Linearly Tapered
75% Linearly Tapered
76
CHAPTER 5
SUMMARY AND CONCLUSION
The research presented in this thesis can be summarized as follows. In Chapter 1, a
review of the technical literature relating to lifting-line theory and the modifications to the
original formulation was presented. This information showed that while many modifications
have been made to the original formulation, little work has been published on non-planar
applications of the theory. The technical literature that did address non-planar wings focused
primarily on the optimum circulation distribution, disregarding the planform shape required to
produce the distribution.
Chapter 2 discussed the traditional formulation of Prandtl’s lifting-line theory in detail.
The theory assumed that a bound vortex was attached at the quarter chord, with an infinite
number of trailing vortex filaments of infinitesimal strength forming the wake. The optimal
circulation distribution was shown to be elliptical. The solution for a general planform using a
Fourier series for the circulation was demonstrated and the analytical solution for the influence
of the wake provided.
Starting from the original formulation, Chapter 3 provided an expansion to lifting-line
theory. Only 2 changes were made to the assumptions for the original theory. First, instead of
considering a planar wake, the wake was assumed to remain in the same shape as the wing and
not roll up or sink. Secondly, the induced velocity from the bound vortex was considered to
have no self-induced velocities, despite being non-planar. These new assumptions led to an
expanded governing equation for lifting-line theory. This expanded form simplified to the
traditional formulation for planar wings. Using geometry specific to wings with dihedral, the
new formulation was simplified to a more compact form for solving. A simplified finite element

77
method was presented which considered bending in one direction over a beam. This method was
coupled with the generalized form of the theory to form a static aeroelastic model for the wing.
The results for a rigid wing with dihedral and a deformable wing were presented in
Chapter 4. A convergence analysis performed showed satisfactory convergence of the Fourier
coefficients toward their respective asymptotic values using 32 panels over the wing. Analysis
of a wing with dihedral showed the trends of increasing aspect ratio to be independent of
dihedral angle. An increase of aspect ratio decreased induced drag and increased lift-curve slope
the same percentage for flat wings and wings with dihedral. Furthermore, an elliptical wing
produced the minimum induced drag for both flat wings and wings with dihedral. Dihedral
decreased the efficiency of all untwisted wings equally. The decrease in span efficiency factor
and lift-curve slope for dihedral angles less than 6 degrees was less than 1.1% compared with flat
wings.
The deflection seen in the deformable wing was similar for all planforms investigated.
Compared to the elliptical wing, all other planforms showed deflections within ±6%. Planforms
with more lift generated toward the wingtips experienced larger deflections than those with more
lift generated closer to the center of the wing. Significant bending of the wing occurred within
75% semi-span for all planforms. The taper of EI along the wing increased deflection of the
wing 30% and 90% for cases of 25% and 50% linearly tapered EI respectively.
Deformation of the wing caused a non-linear decrease in lift coefficient and span
efficiency factor, most noticeable in the 50% tapered stiffness. At low angles of attack, the lift
coefficient penalty was less than 1%, but increased to 10% at 10 degrees angle of attack.
Similarly the span efficiency factor showed less than 0.2% decrease at 2 degrees angle of attack,
but more than 3% decrease at 10 degrees. The elliptical wing showed the most significant

78
decrease in span efficiency factor due to deflection and the rectangular wing showed the least.
These effects were due to the effective twist non-planar wings experience at non-zero angles of
attack.
To more fully understand the effect of non-planar geometries on the aerodynamics of a
wing, additional work on the model is recommended, primarily focused on the addition of a term
to account for the self-induced velocities of the bound vortex.

79
REFERENCES

80
REFERENCES
[1] Prandtl, L., “Applications of Modern Hydrodynamics to Aeronautics,” NACA TR-116, June 1921.
[2] Munk, M., “The Minimum Induced Drag of Aerofoils,” NACA Report 121, 1923.
[3] Glauert, H., “The Monoplane Aerofoil,” The Elements of Airfoil and Airscrew Theory, Cambridge Univ. Press, Cambridge, UK, 1926, pp. 137-155.
[4] Anderson, J. Jr., “Incompressible Flow over Finite Wings,” Fundamentals of Aerodynamics, 4th ed., McGraw-Hill, New York, NY, 2005, pp. 391-465.
[5] Katz, J. and Plotkin, A., “Three-Dimensional Small-Disturbance Solutions,” Low-Speed Aerodynamics, 2nd ed., Cambridge Univ. Press, New York, NY, 2001, pp. 167-205.
[6] Rasmussen, M. and Smith, D., “Lifting-Line Theory for Arbitrarily Shaped Wings,” Journal of Aircraft, Vol. 36, No. 2, 1999, pp. 340-348.
[7] Gates, S., “An Analysis of Rectangular Monoplane with Hinged Tips,” Reports and Memoranda 1175, Aeronautical Research Committee, Aeronautical Research Council, London, 1928.
[8] Anderson, R and Millsaps, K., “Application of the Galerkin Method to the Prandtl Lifting-Line Equation,” Journal of Aircraft, Vol. 1, No. 3, 1964, pp. 126-128.
[9] Karamcheti, Krishnamurty, “Elements of Thin Airfoil Theory” and “Elements of Finite Wing Theory,” Principles of Ideal-Fluid Aerodynamics, John Wiley & Sons, Inc., New York, 1966, p. 510 and p. 535 – 567.
[10] Lotz, I., “Berechnung der Auftriebsverteilug beliebig geformter Flugel,” Zeitschrift für Flugetechnik und Motorluftschiffahrt, Vol. 22, No. 7, 1931, pp. 189-195.
[11] Weissinger, J., “The Lift Distribution of Swept-Back Wings,” NACA TM-1120, March 1947.
[12] Pistolesi, E., “Considerazioni sul problema del biplane,” Aerotecnica., Vol. 13, pp. 185, 1933.
[13] Owens, D. B., “Weissinger’s Model of the Nonlinear Lifting-Line Method for Aircraft Design,” 36th AIAA Aerospace Sciences Meeting and Exhibit, American Institute for Aeronautics and Astronautics, 1998.

81
REFERENCES
[14] Cone, C., “The Theory of Induced Lift and Minimum Induced Drag of Nonplanar Lifting Systems,” NASA TR R-139, 1962.
[15] Takahashi, T. and Donovan, S., “Non Planar Span Loads for Minimum Induced Drag,” 49th AIAA Aerospace Sciences Meeting, Orlando, Florida, January 2011, American Institute for Aeronautics and Astronautics, 2011.
[16] Nguyen, N., “Elastically Shaped Future Air Vehicle Concept,” NASA Innovation Fund 2010 Project, October 2010.
[17] Tietjens, O and Prandtl, J, “Airfoil Theory,” Hydro- & Aero-mechanics, Dover, New York, 1957, p. 185 – 225.
[18] McCormick, Barnes, “Drag,” Aerodynamics, Aeronautics, and Flight Mechanics, 1st ed., John Wiley & Sons, New York, 1979, p. 186-195.
[19] Bridges, David H., “Finite Wing Lift-Curve Slope Calculations using Lifting-Line Theory,” AIAA Applied Aerodynamics Conference, AIAA Paper 2005-4839, June 2005.

82
APPENDIX

83
APPENDIX
NON-PLANAR LIFTING LINE CODE
Module WingGeometry Implicit None Integer :: PanelDiv, NumPoints, HalfPoints Real (Kind=2) :: Span, Cr, Ct, Lambda, AR, ChordAvg, Area Real (Kind=2), Dimension(500) :: GeoTwist, AeroTwist, Chord End Module WingGeometry Module PanelGeometry Implicit None Real (Kind=2), Dimension(500) :: PEPT, PEPYT, PEPZT, Phi2 End Module PanelGeometry Program AELLT Use WingGeometry Use PanelGeometry Implicit None Integer :: Iterations, Repeat, i, j, k, t Real (Kind=2) :: Q, Tb, Te, Pi, AoA, dL, CL, Cd, L, Gamma1, Gamma2, dN1, dN2 Real (Kind=2) :: TS, T1, T2, Epsilon, Velocity, dL1, dL2, dN,TStep Real (Kind=2), Dimension(500) :: Alpha, EI, PEPYW, PanelSpanFEM Real (Kind=2), Dimension(500) :: PEPTW, PointsY, PointsPolar, PEPZW, PointsZ Real (Kind=2), Dimension(500) :: DEF1, PEPZ2, PointsZ2, PEPY2, PointsY2 Real (Kind=2), Dimension(500) :: PointsPolar2, PointsPolarZ2, dLp, dNp, F, M Real (Kind=2), Dimension(500) :: Lp, dNp2, F2, DEF2, PEPY1, PanelSpan Real (Kind=2), Dimension(500) :: Normal2, FourierCoeff1, FourierCoeff2 !Constants Pi = dacos(-1.d0) !Define the wing. AR = 10.d0 Cr = 5.236d0 Ct = 0.50*Cr ChordAvg = (Cr + Ct)/2.d0 Span = AR * ChordAvg !Cr = 5.d0 !Span = (AR/4.d0) * Pi * Cr !ChordAvg = Span / AR !Area = Span * ChordAvg !Define the Panels

84
APPENDIX (continued)
NumPoints = 32 !This defines the number of panels HalfPoints = NumPoints/2 PanelDiv = 50 !Number of devisions per panel for integration Do t = 1,5 !Define the flight conditions Q = 50 !dynamic pressure in PSF AoA = (8.295+(t-1) * 0.001d0) * Pi/180.d0 Velocity = 140 * (88/60) !Flight Velocity in ft/s Density = 2 * Q / (Velocity * Velocity) !Define Convergence Criterion Epsilon = 0.001 !Define the location of the panels on the wing. In polar coordinates !the location will stay the same. The cartesian coordinates of the !panels and control points will vary due to the deformation of the !wing. The same polar coordinates will be used for every iteration !as the polar coordinates are based on arc length, which is constant. PEPT = 0.d0 PEPT(1) = 0.d0 PointsPolar(1) = Pi/Dble(2.d0*NumPoints) TStep = Pi/Dble(NumPoints) Do i=2,NumPoints PEPT(i) = PEPT(i-1) + TStep PointsPolar(i) = PointsPolar(i-1) + TStep End Do PEPT(NumPoints+1) = Pi Do i=1,NumPoints PEPY1(i) = -Span/2.d0 * dcos(PEPT(i)) PointsY(i) = -Span/2.d0 * dcos(PointsPolar(i)) End Do PEPY1(1) = -Span/2.d0 PEPY1(NumPoints+1) = Span/2.d0 PEPZ1 = 0.d0 Phi1 = 0.d0 !Now Isolate the length of each panel. The length of each panel !will remain the same, but the panels will be of different !lengths due to the constant polar spacing.

85
APPENDIX (continued)
Do i=1,NumPoints PanelSpan(i) = PEPY1(i+1) - PEPY1(i) End Do Do i=1,HalfPoints PanelSpanFEM(i) = PanelSpan(HalfPoints+i) End Do !We can now define the angle of attack and local chord !for the control points. Do i = 1, NumPoints GeoTwist(i) = 0.d0 !Geometric twist in RADIANS AeroTwist(i) = 0.d0 * (Pi/180.d0) !Alpha_L=0 in RADIANS Alpha(i) = AoA + GeoTwist(i) - AeroTwist(i) !Local AoA in RADIANS Chord(i) = Cr + (abs(PointsY(i))/(Span/2.d0)) * (Ct-Cr) !Chord(i) = 2 * ((Cr/2.d0)**2 * (1 - (2.d0 * PointsY(i) / Span)**2))**0.5 End Do !Define the Structural Properties of the wing Do i =HalfPoints + 1,NumPoints EI(i) = .15d0 * 10**6 !- (0.5d0 * (0.15d0*10**6) * abs(PointsY(i))/(Span/2.d0)) !Structural strength, half wing EI(NumPoints-(i-1)) = EI(i) End Do !The wing is still flat - use the analytical solution. Call TLLM(PointsPolar, Alpha, FourierCoeff1) !Calculate the normal force for use in the FEM model. Tb = PEPT(HalfPoints+1) Te = PEPT(HalfPoints+2) TS = (Te-Tb) / 100 dCLp = 0.d0 dLp = 0.d0 Do i=HalfPoints+1,NumPoints T1 = Tb T2 = Tb + TS Do j=1,100
86
APPENDIX (continued)
Gamma1 = 0.d0 Gamma2 = 0.d0 Do k =1,NumPoints Gamma1 = Gamma1 + FourierCoeff1(k) * dsin(k*T1) Gamma2 = Gamma2 + FourierCoeff1(k) * dsin(k*T2) End Do dL1 = Gamma1 * 4.d0 * Span * Q dL2 = Gamma2 * 4.d0 * Span * Q dL = (dL1 + dL2) * (-Span/2.d0 * dcos(T2) + Span/2.d0 * dcos(T1))/2.d0 dLp(i) = dLp(i) + dL T1 = T2 T2 = T2 + TS End Do Tb = Te Te = PEPT(i+2) End Do dNp = 0.d0 L = 0.d0 Do i=HalfPoints + 1, NumPoints dNp(i) = dLp(i) L = L + dLp(i) End Do !Now that we have the forces over the panels, we call the Finite Element !Method. This subroutine will use the forces provided here as well as !an input matrix about the characteristics of the wing to calculate the !deflection based on the normal force - note that lifting force is not !what we are concerned with, as the bending occurs normal to the surface !not normal to the flat axis system M = 0.d0 !No moments F = 0.d0 F(1) = dNp(HalfPoints+1) / 2.d0 Do i= 2, HalfPoints + 1 F(i) = dNp(HalfPoints + (i-1)) /2.d0 + dNp(HalfPoints + i) / 2.d0 End Do Call FEM(HalfPoints,EI,PanelSpanFEM,F,M,DEF1)

87
APPENDIX (continued)
Open(10,File='F:\AeroEng Stuff\Data Output\LT50_UntaperedEI_SF.dat') Write(10,*) '****************************************************************************' Write(10,10) Write(10,11) (FourierCoeff1(i),i = 1, NumPoints) Write(10,11) (DEF1(i),i = 1, HalfPoints) !The deflection is defined by the FEM. Now we must relate this to !the entire wing. The deflection will then also define the location !in the y-direction as well, as the wing does not change length !only bends. Do Iterations = 1,1000 Do i=HalfPoints+2,NumPoints+1 PEPZ2(i) = DEF1(i-(HalfPoints+1)) End Do Do i=1,HalfPoints PEPZ2(i) = PEPZ2((NumPoints+1) - (i-1)) End Do PEPZ2(HalfPoints+1) = 0.d0 Do i=1,NumPoints Phi2(i) = dasin((PEPZ2(i+1)-PEPZ2(i))/PanelSpan(i)) End Do PEPY2= 0.d0 Do i=HalfPoints+2,NumPoints PEPY2(i) = PEPY2(i-1) + PanelSpan(i-1) * dcos(Phi2(i)) End Do PEPY2(NumPoints+1) = Span/2.d0 Do i=1,HalfPoints PEPY2(i) = -PEPY2((NumPoints+1)-(i-1)) End Do Do i=1,NumPoints Normal2(i) = AoA * dcos(Phi2(i)) + GeoTwist(i) - AeroTwist(i) End Do PEPYT = 0.d0 PEPZT = 0.d0
88
APPENDIX (continued)
Do i=Halfpoints+2,NumPoints+1 PEPYT(i) = PEPYT(i-1) - (dcos(PEPT(i)) - dcos(PEPT(i-1))) * dcos(Phi2(i-1)) PEPZT(i) = PEPZT(i-1) - (dcos(PEPT(i)) - dcos(PEPT(i-1))) * dsin(Phi2(i-1)) End Do Do i=1,Halfpoints PEPYT(i) = -PEPYT((NumPoints+1) - (i-1)) PEPZT(i) = PEPZT((NumPoints+1) - (i-1)) End Do !Use the predetermined points to call the numerical solver. Call NLLM(PointsPolar,Normal2,FourierCoeff2,Phi2) !Solve for the forces on the new wing. Again, only the !Normal coefficient is important, the lift doesn't matter !to the bending. T1 = Tb T2 = Tb + TS dNp2 = 0.d0 Do i=Halfpoints+1, NumPoints Do j=1,100 Gamma1 = 0.d0 Gamma2 = 0.d0 Do k =1,NumPoints Gamma1 = Gamma1 + FourierCoeff1(k) * dsin(k*T1) Gamma2 = Gamma2 + FourierCoeff1(k) * dsin(k*T2) End Do dN1 = Gamma1 * 4.d0 * Span * Q dN2 = Gamma2 * 4.d0 * Span * Q dN = (dN1 + dN2) * (-Span/2.d0 * dcos(T2) + Span/2.d0 * dcos(T1))/2.d0 dNp2(i) = dNp(i) + dN T1 = T2 T2 = T2 + TS End Do Tb = Te Te = PEPT(i+2) End Do

89
APPENDIX (continued)
F2 = 0.d0 F2(1) = dNp2(HalfPoints+1) / 2.d0 Do i= 2, HalfPoints + 1 F2(i) = dNp2(HalfPoints + (i-1)) /2.d0 + dNp2(HalfPoints + i) / 2.d0 End Do !Call the bending model to solve the new shape Call FEM(HalfPoints,EI,PanelSpanFEM,F2,M,DEF2) Write(10,12) Iterations Write(10,11) (FourierCoeff2(i),i = 1, NumPoints) Write(10,11) (DEF2(i),i = 1, HalfPoints) Repeat = 0 !Compare the deflections. Converged solutions are within espilon. !If the solution is not converged, iterate again. Do i=1,HalfPoints+1 If(abs(DEF1(i) - DEF2(i)) .gt. Epsilon) Repeat = 1 If(abs(DEF1(i) - DEF2(i)) .gt. Epsilon) Exit End Do !Exit the loop if the solution has converged If(Repeat .eq. 0) Exit !Move the necessary values to a different storage location DEF1 = DEF2 F1 = F2 dNp1 = dNp2 Phi1 = Phi2 Normal1 = Normal2 FourierCoeff1 = FourierCoeff2 End Do If(Repeat .ne. 0) Write(*,*)'Unconverged Solution' If(Repeat .ne. 0) Pause L = 0.d0 Do i=Halfpoints+1, NumPoints Lp(i) = dNp(i) * dcos(Phi2(i))

90
APPENDIX (continued)
L = L + Lp(i) End Do !Only half the wing calculated, double to get correct lift L = 2.d0 * L !Compute Lift Coefficient Cl = L / (Q * ChordAvg * Span) Cd = 0.d0 Do i=1,NumPoints-1,2 Cd = Cd + (pi * AR) * Dble(i) * FourierCoeff2(i) * FourierCoeff2(i) End Do Write(10,13) (AoA*180.d0/Pi),Cl,Cd End Do Close(10) 10 Format('Analytical Solution for:') 11 Format(32(F15.12,1x)) 12 Format('Iteration: ',I4) 13 Format('AoA: ',F8.5,1x,'Cl= ',F8.7,1x, 'Cd= ', F8.7) End Program AELLT Subroutine TLLM(PointsPolar, Alpha, FourierCoeff) Use WingGeometry Implicit None Integer :: i, j, Status Integer, Dimension(500) :: P Integer, Parameter :: Size = 500 Real (Kind=2), Dimension(500,500) :: LLMatrix Real (Kind=2), Dimension(500) :: PointsPolar, FourierCoeff, Alpha Real (Kind=2) :: Pi, Geo, Ind Pi = dacos(-1.d0) !Create the influence matrix Do i = 1, NumPoints Do j = 1, NumPoints Geo = 0.d0

91
APPENDIX (continued)
Ind = 0.d0 LLMatrix(i,j) = 0.d0 Geo = dsin(Dble(j)*PointsPolar(i)) * (2*Span)/(Pi*Chord(i)) Ind = Dble(j) * dsin(Dble(j)*PointsPolar(i))/dsin(PointsPolar(i)) LLMatrix(i,j) = Geo + Ind End Do End Do Open(Unit = 1, File = 'InfluenceMatrixT.csv') Write(1,10) ((LLMatrix(i,j),j = 1, NumPoints),i = 1, NumPoints) Close(1) Call GAUSSP(Size, NumPoints, LLMatrix, Alpha, Status, FourierCoeff, P) If (Status .eq. 1) Write(*,*) 'Failure in solution of the circulation distribution' 10 Format(32(F11.7,1x)) End Subroutine TLLM Subroutine NLLM(PointsPolar,Normal,FourierCoeff,Phi2) Use WingGeometry Implicit None Integer :: i, j, Status Integer, Dimension(500) :: P Integer, Parameter :: Size = 500 Real (Kind=2), Dimension(500,500) :: LLMatrix Real (Kind=2), Dimension(500) :: PointsPolar, FourierCoeff, Normal,Phi2, Phi Real (Kind=2) :: Pi, T0, Y0, Z0, Sum, PhiP Pi = dacos(-1.d0) !Create the influence matrix. Do i = 1, NumPoints PhiP = Phi2(i) Do j = 1, NumPoints T0 = PointsPolar(i) Sum = 0.d0 Call NumericalInfluence(PointsPolar,T0,PhiP,i,j,Sum) LLMatrix(i,j) = Sum + (dsin(Dble(j)*T0) * (2*Span)/(Pi*Chord(i))) End Do End Do

92
APPENDIX (continued)
!Now solve the set of simultaneous equations developed. Open(Unit = 1, File = 'InfluenceMatrixN.csv') Write(1,10) ((LLMatrix(i,j),j = 1, NumPoints),i = 1, NumPoints) Close(1) Call GAUSSP (Size, NumPoints, LLMatrix, Normal, Status, FourierCoeff, P) If (Status .eq. 1) Write(*,*) 'Failure in solution of the circulation distribution' 10 Format(32(F11.7,1x)) End Subroutine NLLM Subroutine NumericalInfluence(PointsPolar,T0,PhiP,i,j,Sum) Use WingGeometry Implicit None Real (Kind=2) :: Pi, Step, T1, Sum, T2, T3, I1, I2, I3, Int, T0, CTL1, CTL2, PhiP Real (Kind=2), Dimension(500) :: PointsPolar Integer :: SD, Pts, k, i, j, LLP, ULP, SubPts Pi = dacos(-1.d0) SubPts = 50 !EVEN Step = PointsPolar(1)/(Dble(SubPts/2)) T1 = 0.d0 Sum = 0.d0 LLP = (i-1) * SubPts + SubPts/2 ULP = (NumPoints * SubPts) - LLP Do k=1,LLP-1,1 T3 = T1 + Step T2 = T1 + Step/2.d0 Call Influence(I1,j,T0,T1,PhiP) Call Influence(I2,j,T0,T2,PhiP) Call Influence(I3,j,T0,T3,PhiP) Sum = Sum + Step/6.d0 * (I1 + 4.d0 * I2 + I3) T1 = T1 + Step End Do T1=T1 + 2*Step
93
APPENDIX (continued)
Do k=1,ULP-1,1 T3 = T1 + Step T2 = T1 + Step/2.d0 Call Influence(I1,j,T0,T1,PhiP) Call Influence(I2,j,T0,T2,PhiP) Call Influence(I3,j,T0,T3,PhiP) Sum = Sum + Step/6.d0 * (I1 + 4.d0 * I2 + I3) T1 = T1 + Step End Do !Integrate across the discontinuity. T1 = T0 - Step T2 = T0 + Step Call Influence(I1,j,T0,T1,PhiP) Call Influence(I2,j,T0,T2,PhiP) Int = Step * (I1 + I2) Sum = Sum + Int !Divide the sum by Pi, as found in the formulation. Sum = Sum/Pi End Subroutine NumericalInfluence !Calculate the influence integrand at each theta location. Subroutine Influence(Int,j,T0,T,PhiP) Use WingGeometry Implicit None Real (Kind=2) :: T,T0,Y,Y0,Z,Z0,FH,FL,FC,Int,Pi,Mult,PhiP Integer :: i, j Pi = dacos(-1.d0) FH = Dble(j) * dcos(dble(j) * T) Call CartLoc(T,Y,Z) Call CartLoc(T0,Y0,Z0) FL = ((Z0-Z)**2 + (Y0-Y)**2)**0.5
94
APPENDIX (continued)
!This term accounts for the difference between the radius between T0 and T !and the normal at T0. This will need to be adjusted for various wing !geometries used. FC = dcos(PhiP - datan((Z0-Z)/(Y0-Y))) Int = FH * FC / FL !To account for either upwash or downwash, we multiply by -1 if the vortex !is imposing a downwash. Otherwise, no correction is necessary. Mult = dcos(T) - dcos(T0) If(Mult .lt. 0.d0) Int = Int * (-1.d0) End Subroutine Influence !This subroutine defines the non-planar aspect of the wing geometry. Subroutine CartLoc(T,Y,Z) Use WingGeometry Use PanelGeometry Implicit None Real (Kind=2) :: Y,Z,T Integer :: Panel, i Do i=1, NumPoints If(T .ge. PEPT(i)) Panel = i End Do Y = PEPYT(i) + (dcos(T) - dcos(PEPT(i))) * dcos(Phi2(i)) Z = PEPZT(i) + (dcos(T) - dcos(PEPT(i))) * dsin(Phi2(i)) End Subroutine CartLoc Subroutine FEM(N,EI,L,F,M,DEF) Implicit None Real (kind=2), Dimension(500) :: EI, DEF Real (Kind=2), Dimension(500) :: F, M, L Real (Kind=2), Dimension(500,500) :: Kb, Kbbc Real (Kind=2), Dimension(500,500) :: Kzz, Kzt, Ktz, Ktt, KttI, Kbf, KbfI, Mult1, Mult2 Real (Kind=2), Dimension(8,8,64) :: Ke !Real (Kind=2) :: L Integer :: i, j, k, N

95
APPENDIX (continued)
Integer, Dimension(500) :: INDX !Defining the local stiffness matrix. Do i=1,N Ke(1,1,i) = 12.d0 Ke(1,2,i) = 6.d0*L(i) Ke(1,3,i) = -Ke(1,1,i) Ke(1,4,i) = Ke(1,2,i) Ke(2,1,i) = Ke(1,2,i) Ke(2,2,i) = 4.d0*L(i)*L(i) Ke(2,3,i) = -Ke(1,4,i) Ke(2,4,i) = 2.d0*L(i)*L(i) Ke(3,1,i) = Ke(1,3,i) Ke(3,2,i) = -Ke(1,4,i) Ke(3,3,i) = Ke(1,1,i) Ke(3,4,i) = -Ke(1,2,i) Ke(4,1,i) = Ke(2,1,i) Ke(4,2,i) = Ke(2,4,i) Ke(4,3,i) = Ke(2,3,i) Ke(4,4,i) = Ke(2,2,i) End Do !Build the global bending stiffness matrix for the beam. Kb = 0.d0 DO i=1,N DO j=1,4,1 DO k=1,4,1 Kb(2*(i-1)+j,2*(i-1)+k) = Kb(2*(i-1)+j,2*(i-1)+k) + Ke(j,k,i) End DO End DO End DO !Apply the boundary conditions to the matrices DO i=1,(4+(N-2)*2),1 DO j=1,(4+(N-2)*2),1 Kbbc(i,j) = Kb(i+2,j+2) End DO End DO DO i=1, N,1

96
APPENDIX (continued)
F(i) = F(i+1) M(i) = M(i+1) End DO F(N+1) = 0.d0 M(N+1) = 0.d0 !Establish The SubMatrices DO i=1,N,1 DO j=1,N,1 Kzz(i,j) = Kbbc(1+(i-1)*2,1+(j-1)*2) Kzt(i,j) = Kbbc(1+(i-1)*2,2+(j-1)*2) Ktz(i,j) = Kbbc(2+(i-1)*2,1+(j-1)*2) Ktt(i,j) = Kbbc(2+(i-1)*2,2+(j-1)*2) End DO End DO !Since the moments are zero this is a simple problem to solve. The final bending !stiffness matrix becomes [Kbf] = ([Kzz] - [Kzt][KttI][Ktz])EI/L**3 !We compute this final bending stiffness matrix here. Call MIGS(Ktt,N,KttI,INDX) Mult1 = 0.d0 !Initialize the Matrix as 0 Mult2 = 0.d0 !Initialize the matrix as 0 DO i=1,N DO j=1,N DO k=1,N Mult1(i,j) = Mult1(i,j) + Kzt(i,k) * KttI(k,j) End DO End DO End DO DO i=1,N DO j=1,N DO k=1,N Mult2(i,j) = Mult2(i,j) + Mult1(i,k) * Ktz(k,j) End DO End DO End DO DO i=1,N DO j=1,N Kbf(i,j) = (Kzz(i,j) - Mult2(i,j)) * (EI(i) / (L(i)*L(i)*L(i)))

97
APPENDIX (continued)
End DO End DO !Now invert [Kbf] and multiply {F} to find the deformation. Call MIGS(Kbf,N,KbfI,INDX) DEF = 0.d0 DO i=1,N DO j=1,N DEF(i) = DEF(i) + KbfI(i,j) * F(j) End DO End DO End Subroutine FEM ! Updated 10/24/2001. ! !cccccccccccccccccccccccc Program 4.4 cccccccccccccccccccccccccc ! Please Note: ! (1) This computer program is part of the book, "An Introduction to ! Computational Physics," written by Tao Pang and published and ! copyrighted by Cambridge University Press in 1997. ! (2) No warranties, express or implied, are made for this program. !ccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccc SUBROUTINE MIGS(A,N,X,INDX) ! ! Subroutine to invert matrix A(N,N) with the inverse stored ! in X(N,N) in the output. ! Real (Kind=2), Dimension(500,500) :: A,X,B Integer, Dimension(500) :: INDX Integer :: i,j,k,N ! DIMENSION A(50,50),X(50,50),INDX(50),B(50,50) ! DO 20 I = 1, N DO 10 J = 1, N B(I,J) = 0.0 10 CONTINUE 20 CONTINUE
98
APPENDIX (continued)
DO 30 I = 1, N B(I,I) = 1.0 30 CONTINUE ! CALL ELGS(A,N,INDX) ! DO 100 I = 1, N-1 DO 90 J = I+1, N DO 80 K = 1, N B(INDX(J),K) = B(INDX(J),K)-A(INDX(J),I)*B(INDX(I),K) 80 CONTINUE 90 CONTINUE 100 CONTINUE ! DO 200 I = 1, N X(N,I) = B(INDX(N),I)/A(INDX(N),N) DO 190 J = N-1, 1, -1 X(J,I) = B(INDX(J),I) DO 180 K = J+1, N X(J,I) = X(J,I)-A(INDX(J),K)*X(K,I) 180 CONTINUE X(J,I) = X(J,I)/A(INDX(J),J) 190 CONTINUE 200 CONTINUE RETURN END SUBROUTINE ELGS(A,N,INDX) ! Subroutine to perform the partial-pivoting Gaussian elimination. ! A(N,N) is the original matrix in the input and transformed ! matrix plus the pivoting element ratios below the diagonal in ! the output. INDX(N) records the pivoting order. Real (Kind=2), Dimension(500,500) :: A Real (Kind=2), Dimension(500) :: C Integer, Dimension(500) :: INDX ! DIMENSION A(N,N),INDX(N),C(N) ! Initialize the index DO 50 I = 1, N INDX(I) = I 50 CONTINUE ! Find the rescaling factors, one from each row

99
APPENDIX (continued)
DO 100 I = 1, N C1= 0.0 DO 90 J = 1, N C1 = MAX(C1,ABS(A(I,J))) 90 CONTINUE C(I) = C1 100 CONTINUE ! Search the pivoting (largest) element from each column DO 200 J = 1, N-1 PI1 = 0.0 DO 150 I = J, N PI = ABS(A(INDX(I),J))/C(INDX(I)) IF (PI.GT.PI1) THEN PI1 = PI K = I ELSE ENDIF 150 CONTINUE ! Interchange the rows via INDX(N) to record pivoting order ITMP = INDX(J) INDX(J) = INDX(K) INDX(K) = ITMP DO 170 I = J+1, N PJ = A(INDX(I),J)/A(INDX(J),J) ! Record pivoting ratios below the diagonal A(INDX(I),J) = PJ ! Modify other elements accordingly DO 160 K = J+1, N A(INDX(I),K) = A(INDX(I),K)-PJ*A(INDX(J),K) 160 CONTINUE 170 CONTINUE 200 CONTINUE ! RETURN END !************************************* !Solver from * !Numerical Methods with Fortran 77 * ! L.V. Atkinson, P.J. Harley, J.D. Hudson * !Reading, Mass., Addison-Wesley, 1989 * !*************************************

100
APPENDIX (continued)
SUBROUTINE GAUSSP (SIZE,N,A,B,STATUS,X,P) INTEGER :: I, J, K, N, PI, PK, PTINY, SIZE, SOLVED, STATUS REAL*8 :: MAX, MULT, PIVOT, TINY REAL*8 SUM PARAMETER (TINY=1E-10) PARAMETER(SOLVED=0,PTINY=1) INTEGER P(N) REAL*8 :: A(SIZE,SIZE), B(N), X(N) !Give P its initial values DO 10, I=1,N P(I)= I 10 END DO DO 20, I=1, N-1 ! Find the pivot MAX=0 PI = P(I) DO 30, J=I,N IF (ABS(A(P(J),I)) .GT. MAX) THEN MAX = ABS(A(P(J),I)) K = J END IF 30 END DO !Signal if pivot is too small IF (MAX.LE.TINY) THEN STATUS=PTINY GOTO 999 END IF !Otherwise swap elements in P if necessary IF (K.NE.I) THEN P(I) = P(K) P(K) = PI PI = P(I) END IF !Now do the elimination PIVOT = A(PI,I)

101
APPENDIX (continued)
DO 40, K=I+1,N PK = P(K) MULT = A(PK,I)/PIVOT IF (ABS(MULT).GT.TINY) THEN A(PK,I) = MULT DO 50, J=I+1,N A(PK,J)=A(PK,J)-MULT*A(PI,J) 50 END DO B(PK) = B(PK)-MULT*B(PI) ELSE A(PK,I) = 0 END IF 40 END DO 20 END DO ! Perform the back substitution IF (ABS(A(P(N),I)).GT.TINY) THEN !unsure of A(P(N),I) - Typo in source code in book STATUS = SOLVED X(N) = B(P(N))/A(P(N),N) DO 60, I=N-1,1,-1 PI = P(I) SUM = B(PI) DO 70, J=I+1,N SUM=SUM-DPROD(A(PI,J),X(J)) 70 END DO X(I) = SUM/A(PI,I) 60 END DO ELSE STATUS = PTINY END IF 999 END SUBROUTINE
Related Documents






![Vega: Nonlinear FEM Deformable Object Simulatorrun.usc.edu/vega/SinSchroederBarbic2012.pdf · Vega: Nonlinear FEM Deformable Object Simulator ... (CalculiX [DW]) deformable ... J.](https://static.cupdf.com/doc/110x72/5aecb8f27f8b9a3b2e8f8865/vega-nonlinear-fem-deformable-object-nonlinear-fem-deformable-object-simulator.jpg)




