DesignCon 2009 Noise and Jitter Analysis for PLL-Based Frequency Synthesizer Yu Zhu, Cadence Design Systems, Inc. [email protected] , (408) 914-6323 Jian Wei Sun, Cadence Design Systems, Inc. [email protected] , (86) 10-82356116 Yuan Zhu Li, Cadence Design Systems, Inc. [email protected] , (408) 473-8467 Dan Feng, Cadence Design Systems, Inc. [email protected] , (408) 944-7733 Helene Thibieroz, Cadence Design Systems, Inc. [email protected] , (512) 342-5369

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
DesignCon 2009
Noise and Jitter Analysis for
PLL-Based Frequency
Synthesizer
Yu Zhu, Cadence Design Systems, Inc.
[email protected], (408) 914-6323
Jian Wei Sun, Cadence Design Systems, Inc.
[email protected], (86) 10-82356116
Yuan Zhu Li, Cadence Design Systems, Inc.
[email protected], (408) 473-8467
Dan Feng, Cadence Design Systems, Inc.
[email protected], (408) 944-7733
Helene Thibieroz, Cadence Design Systems, Inc.
[email protected], (512) 342-5369

Abstract
In this article, we present a noise-aware PLL simulation flow. In the flow, we provide a
testbench for each PLL building block, such as VCO, PFD/CP, and FD, where their
voltage-domain models with noise information are extracted to capture their dominant
behaviors. The models are used in the top-level PLL simulation to identify key PLL
characteristics including small signal effects such as noise and jitter, large signal effects
such as locking settle time, and power supply and substrate interference effects. The flow
is tested on an integer-N PLL. We show that the simulation results with the flow closely
match transistor-level analysis while the performance is orders of magnitude faster.
Author(s) Biography
Yu Zhu received his Ph.D. in Electrical Engineering from University of Illinois at
Urbana Champaign in 2002. He currently is a Senior Engineering Manager at Cadence
Design Systems, Inc. His research interests include the computational electromagnetics
and simulation of analog/RF/mixed-signal circuits and systems. He was the recipient of
2001 Y.T.Lo Outstanding Graduate Research Award from University of Illinois. He is a
co-author of the book “Multigrid Finite Element Methods for Electromagnetic Modeling”
by Wiley-IEEE Press.
Jian Wei Sun received his Ph.D in Electrical Engineering from Institute of
Semiconductor, Chinese Academy of Science. He is currently a Member of Consultant
Staff with Cadence Design Systems, Inc. He has previously worked at Lanzhou
University. His research interest is analog and RF circuit simulation.
Yuan Zhu Li received his M.S. degree in Electrical Engineering from Virginia Tech,
Blacksburg, VA, in 2001. He joined Cadence design Systems in 2005 where he is a
Principal Product Engineer focusing on RF Simulation. He spent the first 3 years of his
professional career as RFIC design engineer at RF Integrated Corp, Irvine, CA,
developing WLAN chipset, and 1 year at Tropian Inc, Cupertino, CA as Senior RFIC
Design Engineer designing multi-mode cellular phone chipset.
Dan Feng received his Ph.D in Computer Science from University of Colorado at
Boulder in 1993. He is currently a Senior Architect and Group Director at Cadence
Design Systems, Inc. His research interests are analog/RF and mixed signal simulation.
Helene Thibieroz received her B. Tech. and her M.S. degree from the National Institute
of Applied Sciences, Toulouse, France and her degree in Doctoral studies in Dept. of
Electrical and microelectronics from the Paul Sabatier Scientific University, Toulouse,
France in May, 1995. From 1995 to 2001, she worked as a staff characterization engineer
at Motorola where she focused on Analog characterization for deep submicron CMOS,
RF and BiCmos technologies. Since 2001, she has been working as a staff application
engineer at Cadence Design Systems, where she provides technical support and expertise
on Cadence Analog mixed-signal and RF products.

Introduction
The recent growth in wireless communication has generated high demand for low-cost,
high performance RF frequency synthesizers. The phase-locked loop (PLL) based
frequency synthesizer locks the divided feedback clock from the voltage-controlled
oscillator (VCO) to the reference clock by comparing their phase difference through a
phase-frequency detector (PFD) whose outputs drive the charge pump (CP). The low pass
filter (LPF) at the output of the CP suppresses high frequency components and allows
only the slow-varying DC voltage value to control the VCO frequency. The divide ratio
of the frequency divider (FD) in the PLL is variable so that the output frequency of the
VCO can be set to either an integer or a fractional number, which is an integer-N or
fractional-N frequency synthesizer shown in Fig 1 and 2, respectively.
In the integer-N PLL depicted in Fig 1, the output frequency refout fSPNf )( += . The
channel spacing is equal to the input reference frequency, which limits the loop
bandwidth, and thus causes longer loop settle time for narrow channel spacing and higher
close-in phase noise at the output due to the 1/f noise of VCO. The other problem for the
integer-N PLL is so called reference spurs, since the input reference cannot be filtered
out cleanly by LPF, and it modulates VCO and generates sidebands at .refout nff ±
In contrast, the fractional-N PLL frequency synthesizer can achieve fine frequency
resolution with wider loop bandwidth and relative faster settle time by the periodical
modification of the divider modulus. However the periodicity creates the fractional
spurs at the output. Various methods to suppress the spurs have been proposed. The most
popular one is to dither the divider modulus using a Sigma-Delta modulator (SDM) as
shown in Fig 2, such that the average divide ratio is kFN 2/+ and output frequency is
ref
k
out fFNf )2/( += , where k is the number of bits in the SDM and F is channel
Multi-modulus divider
Modulus control Reset
Counter
P÷
fout
D
U Phase
frequency detector
Charge pump
Lower pass filter
Voltage controlled oscillator
Pre-scalar NN /)1( +÷
Swallower
S÷
Channel Selection
Fig 1. Integer-N PLL Frequency Synthesizer
fref
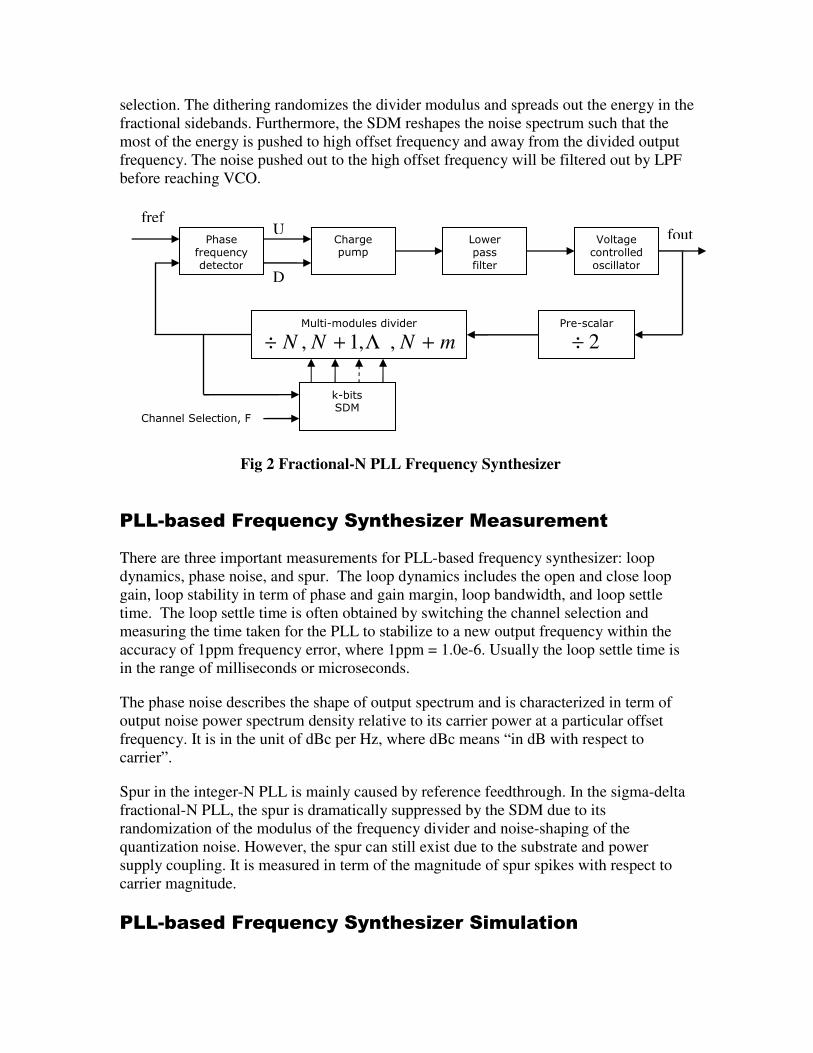
selection. The dithering randomizes the divider modulus and spreads out the energy in the
fractional sidebands. Furthermore, the SDM reshapes the noise spectrum such that the
most of the energy is pushed to high offset frequency and away from the divided output
frequency. The noise pushed out to the high offset frequency will be filtered out by LPF
before reaching VCO.
PLL-based Frequency Synthesizer Measurement
There are three important measurements for PLL-based frequency synthesizer: loop
dynamics, phase noise, and spur. The loop dynamics includes the open and close loop
gain, loop stability in term of phase and gain margin, loop bandwidth, and loop settle
time. The loop settle time is often obtained by switching the channel selection and
measuring the time taken for the PLL to stabilize to a new output frequency within the
accuracy of 1ppm frequency error, where 1ppm = 1.0e-6. Usually the loop settle time is
in the range of milliseconds or microseconds.
The phase noise describes the shape of output spectrum and is characterized in term of
output noise power spectrum density relative to its carrier power at a particular offset
frequency. It is in the unit of dBc per Hz, where dBc means “in dB with respect to
carrier”.
Spur in the integer-N PLL is mainly caused by reference feedthrough. In the sigma-delta
fractional-N PLL, the spur is dramatically suppressed by the SDM due to its
randomization of the modulus of the frequency divider and noise-shaping of the
quantization noise. However, the spur can still exist due to the substrate and power
supply coupling. It is measured in term of the magnitude of spur spikes with respect to
carrier magnitude.
PLL-based Frequency Synthesizer Simulation
Multi-modules divider
mNNN ++÷ ,,1, Λ
fout
D
U Phase
frequency detector
Charge pump
Lower pass filter
Voltage controlled oscillator
Pre-scalar
2÷
Channel Selection, F
Fig 2 Fractional-N PLL Frequency Synthesizer
fref
k-bits SDM

It is computationally expensive to simulate PLLs because the period of the VCO is
almost always very short relative to the loop settle time. Transient analysis forces all the
PLL blocks to use the same small time-steps required by the VCO frequency, and the
PLL locking process often involves hundreds of thousands of VCO cycles to reach a
stable state. Hence, the transient analysis of the whole PLL on the transistor-level is very
time-consuming.
The PLL noise analysis is even more challenging. Because PLL generates repetitive
switching events, its noise performance must be evaluated in the presence of its large
signal behavior. Modeling noise as large signals and performing transient analysis with
both signal and noise sources turned on is what is known as "transient noise" analysis,
which requires extremely tight tolerances and small time steps to adequately resolve the
dynamic range difference between noises and signals.
Due to these computational obstacles, PLL noise analysis is usually done by predicting
the noise of individual blocks, building high-level macro-models that exhibit noise, and
simulating the PLL using the models to find the overall noise. Compared with "transient
noise" approach, this method is not only more computationally efficient, but also allows
the identification of the noise contribution from each individual block and guides the
design optimization. However the accuracy of the method depends on the accuracy of the
models of the blocks. There are two different approaches to developing these models:
phase-domain and voltage-domain approach.
In the phase-domain model approach, the models are formulated in terms of the phase of
the signals. This approach requires that the PLL be locked in a steady state and then the
linearized phase-domain model is extracted at the steady state. The phase-domain model
approach is good for determining loop dynamics and for stability analysis.
In the voltage-domain model approach, the models are formulated in terms of the voltage.
This approach does not require a steady state. The nonlinear models generated in this
approach can capture the behavior details of locking and escape process.
The methodology described in this article uses the voltage-domain model approach to
characterize phase-noise, jitter, spur, power supply and substrate noise interference, and
loop settle time characteristics of a PLL. The unique characteristics of the flow described
here are the accurate and automatic model extraction of the dominant behavior of the
main PLL blocks, (such as the VCO, FD and PFD/CP), the translation of their phase-
noise power spectral densities into synchronous or accumulating time-domain noise, and
the integration of the noise behaviors into the voltage-domain macromodels.
VCO Macromodeling
The key component of a PLL is VCO. In PLL-based frequency synthesizers, VCO
usually is a LC cross-coupled differential pair or ring oscillator. The tuning of the LC
oscillator is achieved by MOS varactor while the tuning of the ring oscillator is achieved
by controlling supple voltage to change the inverter threshold. The ring oscillator has
wider tuning range than the LC oscillator. To widen the tuning range of the LC

oscillator, some PLLs use two tuning mechanisms: coarse tuning and fine tuning: a multi-
bit digitally controlled capacitor array is used for coarse tuning, while a varactor is
utilized for fine tuning.
The simplest model of VCO is usually represented as a linear integrator that converts the
input control voltage multiplied by a tuning curve into the output excess phase. The
instaneous frequency of VCO can be written as
)(0 tKvctlvco += ωω , (1)
where 0ω is the free-running oscillation frequency, ctlV is the control voltage, and K is
the slope of the tuning curve, which is obtained by sweeping the control voltage and
solving for the oscillation frequency. Thus the phase of the VCO output is
'
00 )( vco
t
ctlvco tdvKt φωττωφ +=+= ∫ ∞− (2)
where ∫ ∞−=
t
ctlvco dvK ττφ )(' is the excess phase. However, this model is inadequate for
predicting the injection locking, spur effect, and phase drifting due to the power supply
and substrate noise interference. In the next sections, we derive new equation on the
excess phase.
Linear Perturbation Analysis on Time Varying Systems
Consider an oscillator with the following governing modified nodal analysis (MNA)
equation
[ ] [ ] 0)()(
=+ tvidt
tvdq, (3)
where Ntv ℜ∈)( is the periodic solution of the above nonlinear differential algebraic
equation, which can be solved by shooting Newton or Harmonic Balance method. The
period of the )(tv is T , which is the oscillation period. With the large signal solution, the
equation under small perturbation )(ty can be obtained from (3)
[ ] [ ]
[ ] [ ] [ ] [ ]
( ) )()()()(
)()()(
)()()()(
)()()()()(
tyxtGtxtCdt
d
tytxdv
tvditvitx
dv
tvdq
dt
d
dt
tvdq
tytxtvidt
txtvdq
=+
=++
+
=+++
, (4)
where )(tx is the response of the perturbation, dv
vdqtC
)()( = and
dv
vditG
)()( = . Different

from time-invariant system, both )(tG and )(tC are periodic function with period of T .
Eigen-Modes of Linear Time Varying Systems
To better understand the solution to the linearized time-varying system of (4), let us start
with the eigen-mode analysis of (4) and its adjoint system. The adjoint system is
obtained by taking transpose of (4) and replacing dt
d with -
dt
d. Thus we have the
original linear system
( ) 0)()()()( =+ txtGtxtCdt
d , (5)
and its adjoint linear system
0)()()()( =+− txtGtxdt
dtC
TT . (6)
Substitute )()( tuetx R
tRλ−= into (5), where Rλ is referred to as the right eigen-value and
)(tuR is the right periodic eigen-function, we have
( ) )()()()()()( tutCtutGtutCdt
dRRRR λ=+ . (7)
Solution to (7) reveals all the eigen-modes of the original linear system (5). We can write
all the eigen-modes in matrix format:
( ) )()()()()()( tUtCtUtGtUtCdt
dRRRR Λ=+ , (8)
where
=ΛN
R
R
R
λ
λ
Ο
1
, and [ ])()()( 1 tututU N
RRR Λ= . (9)
Similarly, substitute )()( tuetx L
tLλ= into (6), where Lλ is referred to as the left eigen-
value and )(tuL is the left periodic eigen-function, we have
)()()()()()( tutCtutGtudt
dtC L
T
LL
T
L
T λ=+− . (10)
Write all the eigen-solution to (10) in matrix format, we have

( ) )()()()()()( tUtCtUtGtUtCdt
dL
T
LL
T
L
T Λ=+− , (12)
where
=ΛN
L
L
L
λ
λ
Ο
1
, and [ ])()()( 1 tututU N
LLL Λ= . (13)
Multiply (7) with )(tuT
L and (10) with )(tuR and subtract them, we have the equation:
( ) ( ) )()()()()()( tutCtututCtudt
dR
T
LLRR
T
L λλ −= . Therefore, for each right eigenvalue i
Rλ in
the original system, there is a corresponding left eigenvalue i
Lλ in its adjoint system, such
that i
L
i
R λλ = , and their corresponding eigen-functions are consttutCtu R
T
L =)()()( . After
the normalization of eigen-functions, we can write the property of orthogonality in matrix
format:
Λ=Λ=Λ RL , and ItUtCtU R
T
L =)()()( , (14)
where NNI
×ℜ∈ is identity matrix. The eigen-modes of the original and its adjoint
system are ( ))(),(, tutui
L
i
Riλ , where Ni ,,1 Λ= . They are also referred to as Floquet
modes. For a stable linear system, all its eigenvalue should be 0)Re( ≥iλ . In an
autonomous circuit, there exists one eigen-mode whose 0=λ , which can be proven by
taking derivative w.r.t. t on (3)
[ ] [ ]
0)()(
0)()(
0)()(
0)()(
=+
⇒
=+
⇒
=+
⇒=+
dt
dvtG
dt
dvtC
dt
d
dt
dv
dv
vdi
dt
dv
dv
vdq
dt
d
dt
vdi
dt
dv
dv
vdq
dt
dtvi
dt
tvdq
(15)
Comparison with (7) reveals, in an oscillator, the time-derivative of the solution to (3) is
actually the right eigen-function with 0=λ ; while the its corresponding left eigen-
function )(tuL can be solved from (10) with 0=Lλ . In oscillators, the eigen-mode
corresponding to 0=λ does not decay with time and is referred to as the dominant
mode. It is also referred to as the perturbation project vector (PPV). Throughout this
article, we assume the dominant mode is the first eigen-mode and marked as
==
dt
tdvtutu RL
)()(),(,0 111λ (16)

Response on Linear Time Varying Systems
Using the eigen-modes, we can compute the zero-input response to the following
equation:
( )
=⇒
==
=+
−
−
t
t
R
Ne
e
tUtx
xtx
txtGtxtCdt
d
λ
λ
Ο
1
)()(
)0(
0)()()()(
0
Na
a
Μ
1
, (17)
where the coefficients Naa ,,1 Λ are solved by multiplying (17) with )0()0( CU T
L at
0=t and making use of the eigen-mode orthogonality property in (14)
[ ] 01 )0()0(,, xCUaaT
L
T
N =Λ . (18)
Thus the zero-input response is
00 )0()0()()0()0()()(
1
xCUetUxCU
e
e
tUtxT
L
t
R
T
L
t
t
R
N
Λ−
−
−
=
=λ
λ
Ο . (19)
The zero-state response is the solution to the following equation:
( )∫ ∞−
=⇒
==
=+ t
dssysthtx
tx
tytxtGtxtCdt
d
)(),()(
0)0(
)()()()()( , (20)
where ),( sth is the impulse response of linear time-varying system due to an
impulse perturbation at st = , i.e. )()( stty −= δ . Substitute it into (20), integrate
around st = and make use of the zero-input response in (19), we have
( )
)(),()()()(),(
)0(),(
0),()(),()(
)(
)(
)(
1
1
stsUetUsU
e
e
tUsth
Cssh
sthtGsthtCdt
d
T
L
st
R
T
L
st
st
R
N
>=
=
⇒
=
=+
−Λ−
−−
−−
−
λ
λ
Ο
. (21)
The impulse and zero-input response of linear invariant system can be considered a
special case of (19) and (21), where )(tU R and )(tU L are time-invariant constant
functions. However, in the linear periodic time-varying systems, they are periodic
functions with period T .

Non-Linear Perturbation Theory on Autonomous Circuits
So far, we discuss the eigen-modes of the linear time-varying system obtained
through the linearization of the circuit equation at the steady state; and linear
perturbation expansion in term of eigen modes under the condition of 1)( <<tx .
This condition is valid in the perturbation analysis for driven circuits; but not valid
for autonomous circuits.
Let us consider the non-linear perturbation on autonomous circuits. Starting from
the non-linear MNA equation of (3), we inject a perturbation )(ty into the circuit:
[ ] [ ] )()())(()())((
tytxttvidt
txttvdq=+++
++⊥
⊥ αα
(22)
Shown in Fig 3, the response under the perturbation is decomposed into two
components: the phase component )(tα is the phase change along the oscillation
trajectory; while the amplitude component )(tx⊥ is the amplitude change
perpendicular to the oscillation trajectory.
Since we know from (16) the dominant mode in oscillators is the one moving along
the oscillation trajectory, we expand the amplitude component )(tx⊥ using the all the
decaying eigen-modes:
[ ]∑=
⊥
++=+=N
i
N
N
RRi
i
R
tc
tc
ttuttutcttutx2
2
2
)(
)(
))((,)),(()())(()( ΜΛ ααα (23)
Where )(tci are the time-varying expansion coefficients. The amplitude component
is small in magnitude due to the natural consequence of the nonlinear nature of
oscillators that acts to suppress the amplitude variations; hence 1)( <<⊥ tx and it
can be solved using linear perturbation theory.
v 1
v 2
)(tx⊥
))(( ttv α+v N
Fig3. Response to perturbation in oscillators

For the reason of simplicity, we replace )(tt α+ with 't and (22) becomes
[ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] ( )( ) ( ) )(),'('),'(')'(1'
)'(
)(),'()'(
)'(),'()'()'(
)(),'()'(),'()'(
tyttxtGttxtCdt
dtvi
dt
d
dt
tvdq
tyttxdv
tvditvittx
dv
tvdq
dt
d
dt
tvdq
tyttxtvidt
ttxtvdq
=+++
+
=++
+
=+++
⊥⊥
⊥⊥
⊥⊥
α
. (24)
Since [ ] [ ] 0)'(
'
)'(=+ tvi
dt
tvdq, we can simplify the above to the following equation.
[ ] ( )( ) ( )
( )( ) ( ) )(),'('),'(''
)'(
)(),'('),'(''
)'(
'
tyttxtGttxtCttdt
d
dt
dvtC
tyttxtGttxtCdt
d
dt
d
dt
tvdq
t
=+
∂
∂+
∂
∂+
=++
⊥⊥
⊥⊥
α
α
, (25)
where we assume 1/ <<dtdα . We can decompose (25) into two separate
equations about phase and amplitude, respectively. By left multiplying (25) with the
left eigen-function of dominant mode )(1 α+tuT
L and making use the orthogonality
property of (14), we have the equation forα
)()(1 tytudt
d T
L αα
+= , (26)
Where α is related with excess phase '
vcoφ in (2) as απφ 0
'2 fvco = . Assume 1<<α
and perturbation )(ty is slow varying, (26) can be converted to (2).
∫∫ ∞−∞−≈+==
tT
L
t T
Lvco dyufdyuff ττπττατπαπφ )(2)()(22 1
0,0
1
00
' , (27)
where T
Lu1
0, is the DC component of )(1 tuT
L . However, in oscillators, because there
is no restoring force on the phase of a free-running oscillator, the phase-deviation α
due to the perturbation in the direction of the dominant eigenmode accumulates and
becomes large. As a consequence, the assumptions of the linear perturbation theory
do not hold and the phase of the oscillator should be solved in a nonlinear
perturbation model of (26).
The amplitude component )(tx⊥ can be solved by left multiplying (25) with the left
eigen-functions of all the eigen-modes except the dominant mode and making use of
the orthogonality property of (14), we have the equations for its expansion
coefficient )(,),(2 tctc NΛ :

)(
)(
)(
)(
)(
)(
)( 2
222
ty
tu
tu
tc
tc
tcdt
d
tcdt
d
TN
L
T
L
NNN
=
+
ΜΜΟΜ
λ
λ
(28)
The amplitude component is small in magnitude because nonlinearity in oscillators
suppresses the amplitude variations; hence it can be solved using linear perturbation
theory. Ignoring the amplitude deviation due to its small magnitude, the phase is the only
degree of freedom in the autonomous system. The major behavior of the VCO can be
characterized by the order-reduced nonlinear model of (26), which describes the phase
deviation due to the perturbation injected to any node and thus allows for the
characterization of power supply and substrate noise interference.
Noise in Autonomous Circuits
From (21), we can write the transfer function as ),( τth , where st −=τ is the time
interval and (20) becomes
∫ ∞−−=
t
dytthtx τττ )(),()( , (29)
where it is not hard to see from (21), the impulse pulse response ),( τth is periodic
w.r.t. t . ),(),( ττ Tthth += , where T is the period of the system. Taking Fourier
transformation on both sides of (29), we have
∫+∞
∞−= dfefYftHtx
ftj π2)(),()( , and ∑+∞=
−∞=
−−=k
k
k kffYkffHfX )()()( 00 , (30)
where )( fX and )( fY are Fourier transformation of )(tx and )(ty , respectively.
∫+∞
∞−
−= ττ τπ dethftH fj2),(),( and ∫−
−=2/
2/
2),(1
)(
T
T
kftj
k dteftHT
fHπ
. (31)
)( fY
),( τth
)( fX
)()(0 fYfH
)()( 001 ffYffH −−
)2()2( 002 ffYffH −−
)()( 001 ffYffH ++−
)2()2( 002 ffYffH ++−
)(0 fH
)(1 fH−
)(2 fH−
)(1 fH)(2 fH
f
k
Fig 4. Frequency Translation

Depict (30) in Fig 4, the input signal spectrum has been translated to all the side-
bands. This is reason that small signal input to mixer switched on and off by LO can
be up- or down- converted to different sidebands. From (30), the time-average
power spectrum density (PSD) at the output can be derived as the summation of all
the noise sources on all the sidebands.
∑ ∑+∞=
−∞=
−−=i
k
k
i
yy
i
kn kffSkffHfS )()()( 0
2
0 , (32)
where i is the index for all noise sources; )( fSi
yy is the PSD of the i -th noise
source; and )( fH i
k is the transfer function from the i -th noise source to output.
Let us consider the transfer function of oscillators. Ignore the decaying mode in the
impulse response (21), it can be approximated as
)()()()()(),( 11 ττττ τ −≈−= Λ− tustutUetUthT
LR
T
LR , (33)
where )(τs is step function, i.e. )0(,1)( ≥= ττs . Since )(1 tuL is periodic function, it
can be written as ∑=n
tnfjn
LL eutu 02,11 )(π . Therefore (33) can be written as
( )∑ −=−≈n
nfjtnfjn
LR
T
LR eseututustuthτππ ττττ 00 22,1111 )()()()()(),( . (34)
Its Fourier transformation is
+⊗== ∑∫
∞+
∞−
− )(1
)(),(),( 0
2,112 0 nffjf
eutudethftHn
tnfjn
LR
fj δττ πτπ , (35)
where Fourier transform of )(τs and τπ 02 nfj
e−
are jf
1 and )( 0nff +δ , respectively.
∑
+=
n
n
k
knffj
HfH
)()(
0
, and n
L
nk
R
T
T
tfnkjn
LR
n
k uudteutuT
H,1,1
2/
2/
)(2,11 0)(1 −
−
−− == ∫π
, (36)
where nk
Ru −,1 is the )( nk − -th Fourier coefficient of the periodic function )(1 tuR . The
transfer function shows the 1/f property around each harmonics 0nf . Without loss of
generality, let us assume there is only one noise source. Thus the output PSD is
∑ ∑
∑ ∑∑
+−
−=
−−−
=−−=
+k
yy
n
n
nk
k
yy
n
n
k
k
yykn
fnkfSHkff
kffSfnkf
HkffSkffHfS
))(()(
1
)())((
)()()(
0
22
0
0
2
0
0
2
0
(37)
If we assume the noise sources consist of white and flicker noise, the output noise PSD
around the k -th harmonics has the form of
∆+
∆=
32)(
f
b
f
afS n
, (38)
where 0kfff −=∆ is the offset frequency.
Combined with noise and signal, the output at the k -th harmonics is )()2cos( 0 tntkfAk +π .
Assume noise magnitude is small, it can be written as ( ))(2cos 0 ttkfAk φπ + , where
)2sin()()( 0tkftAtn k πφ−= . Therefore, the PSD for )(tφ can be derived from (38) as
+==
3222
22)(
f
b
f
a
AS
AfS
k
n
k
φ (39)
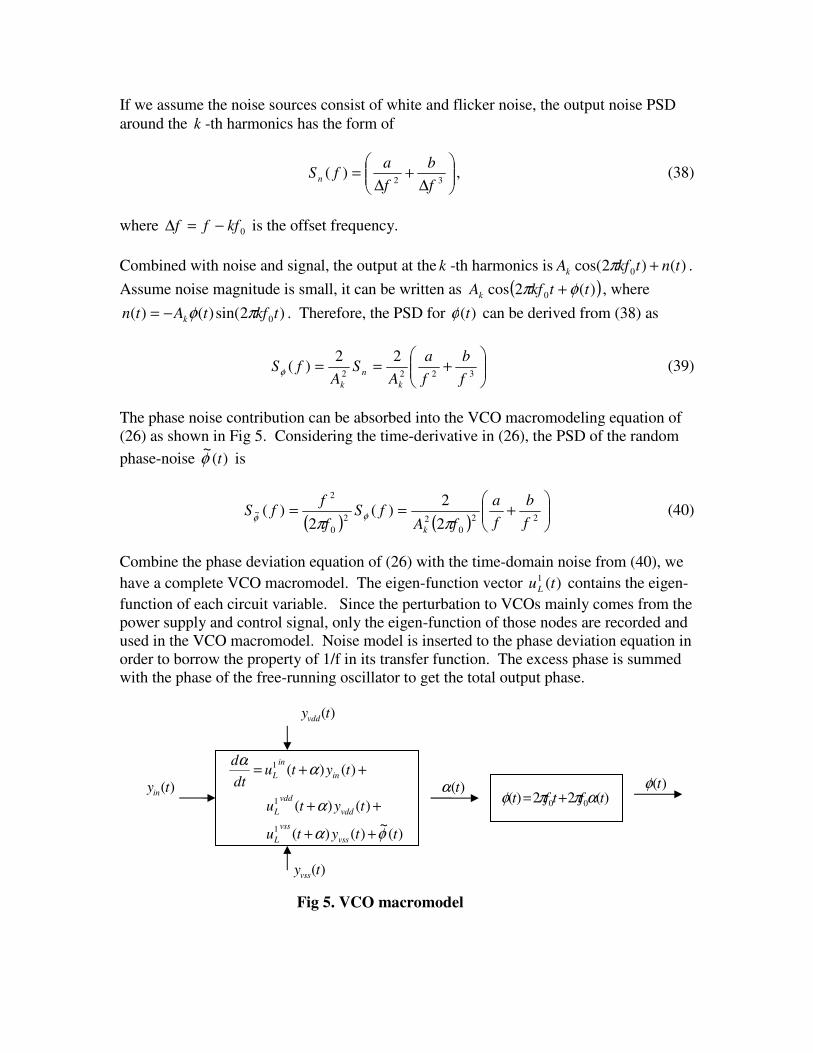
The phase noise contribution can be absorbed into the VCO macromodeling equation of
(26) as shown in Fig 5. Considering the time-derivative in (26), the PSD of the random
phase-noise )(~
tφ is
( ) ( )
+==
22
0
22
0
2
~
2
2)(
2)(
f
b
f
a
fAfS
f
ffS
k ππφφ
(40)
Combine the phase deviation equation of (26) with the time-domain noise from (40), we
have a complete VCO macromodel. The eigen-function vector )(1 tuL contains the eigen-
function of each circuit variable. Since the perturbation to VCOs mainly comes from the
power supply and control signal, only the eigen-function of those nodes are recorded and
used in the VCO macromodel. Noise model is inserted to the phase deviation equation in
order to borrow the property of 1/f in its transfer function. The excess phase is summed
with the phase of the free-running oscillator to get the total output phase.
)(tyin
)(tyvss
)(tyvdd
)(tα)(22)( 00 tftft αππφ +=
)(~
)()(
)()(
)()(
1
1
1
ttytu
tytu
tytudt
d
vss
vss
L
vdd
vdd
L
in
in
L
φα
α
αα
++
++
++=)(tφ
Fig 5. VCO macromodel

VCO Testbench
In order to help with the VCO macromodel extraction, SpectreRF® provides the VCO
testbench shown in Fig 6. The transistor level design of the VCO can be inserted in this
testbench. The testbench provides the terminal for vtune, vdd, and vss. SpectreRF®
performs the several simulations on the testbench:
1. Use periodic steady state analysis to solve for )(tv in (3)
2. Solve for the dominant eigen-mode
==
dt
tdvtutu RL
)()(),(,0
111λ in (8) and (10).
Since )(1 tuR is obtained by taking time-derivative of )(tv , we only solve for )(1 tuL .
3. Periodic noise analysis uses (37) to obtain voltage noise and (39) phase-noise.
4. Create VCO macromodel shown in Fig. 5.
As an example, we extract VCO macromodel for a CMOS differential LC oscillator
shown in Fig 7. In Fig 8, the phase-noise simulation using (37) is depicted as black solid line; the phase-noise from the transient analysis of the VCO macromodel is blue dashed
line; and as a reference, the phase-noise from the transient noise analysis of the transistor-
level VCO is plotted as a red dash-dot line.
The center frequency is 2.48GHz. Below 100KHz, phase-noises are dominated by 1/f
noise and curves show -30dB/dec slope; beyond 100KHz, curves show -20dB/dec slope
since white noise takes over. The close match between the phase-noise from transient
analysis of VCO macromodel and the one from transient analysis of transistor-level VCO
with device noise turned on confirms that the VCO can be replaced by its macromodel in
the PLL simulation without any loss of accuracy.
Fig 6. VCO testbench.

Fig 7. VCO circuit.
Fig 8. VCO phase noise
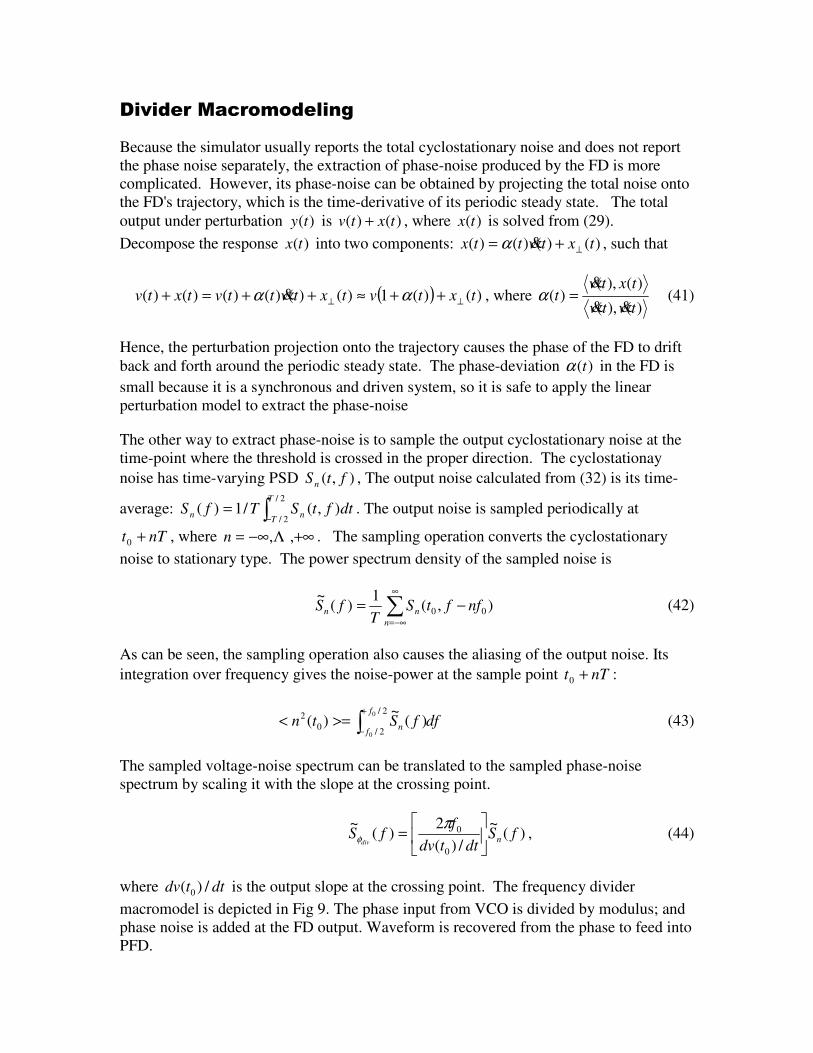
Divider Macromodeling
Because the simulator usually reports the total cyclostationary noise and does not report
the phase noise separately, the extraction of phase-noise produced by the FD is more complicated. However, its phase-noise can be obtained by projecting the total noise onto
the FD's trajectory, which is the time-derivative of its periodic steady state. The total
output under perturbation )(ty is )()( txtv + , where )(tx is solved from (29).
Decompose the response )(tx into two components: )()()()( txtvttx ⊥+= &α , such that
( ) )()(1)()()()()()( txtvtxtvttvtxtv ⊥⊥ ++≈++=+ αα & , where )(),(
)(),()(
tvtv
txtvt
&&
&=α (41)
Hence, the perturbation projection onto the trajectory causes the phase of the FD to drift
back and forth around the periodic steady state. The phase-deviation )(tα in the FD is
small because it is a synchronous and driven system, so it is safe to apply the linear
perturbation model to extract the phase-noise
The other way to extract phase-noise is to sample the output cyclostationary noise at the
time-point where the threshold is crossed in the proper direction. The cyclostationay
noise has time-varying PSD ),( ftSn , The output noise calculated from (32) is its time-
average: ∫−=2/
2/),(/1)(
T
Tnn dtftSTfS . The output noise is sampled periodically at
nTt +0 , where +∞−∞= ,,Λn . The sampling operation converts the cyclostationary
noise to stationary type. The power spectrum density of the sampled noise is
∑∞
−∞=
−=n
nn nfftST
fS ),(1
)(~
00 (42)
As can be seen, the sampling operation also causes the aliasing of the output noise. Its
integration over frequency gives the noise-power at the sample point nTt +0 :
dffStnf
fn∫
+
−>=<
2/
2/0
2 0
0
)(~
)( (43)
The sampled voltage-noise spectrum can be translated to the sampled phase-noise
spectrum by scaling it with the slope at the crossing point.
)(~
/)(
2)(
~
0
0 fSdttdv
ffS ndiv
=
πφ , (44)
where dttdv /)( 0 is the output slope at the crossing point. The frequency divider
macromodel is depicted in Fig 9. The phase input from VCO is divided by modulus; and
phase noise is added at the FD output. Waveform is recovered from the phase to feed into
PFD.
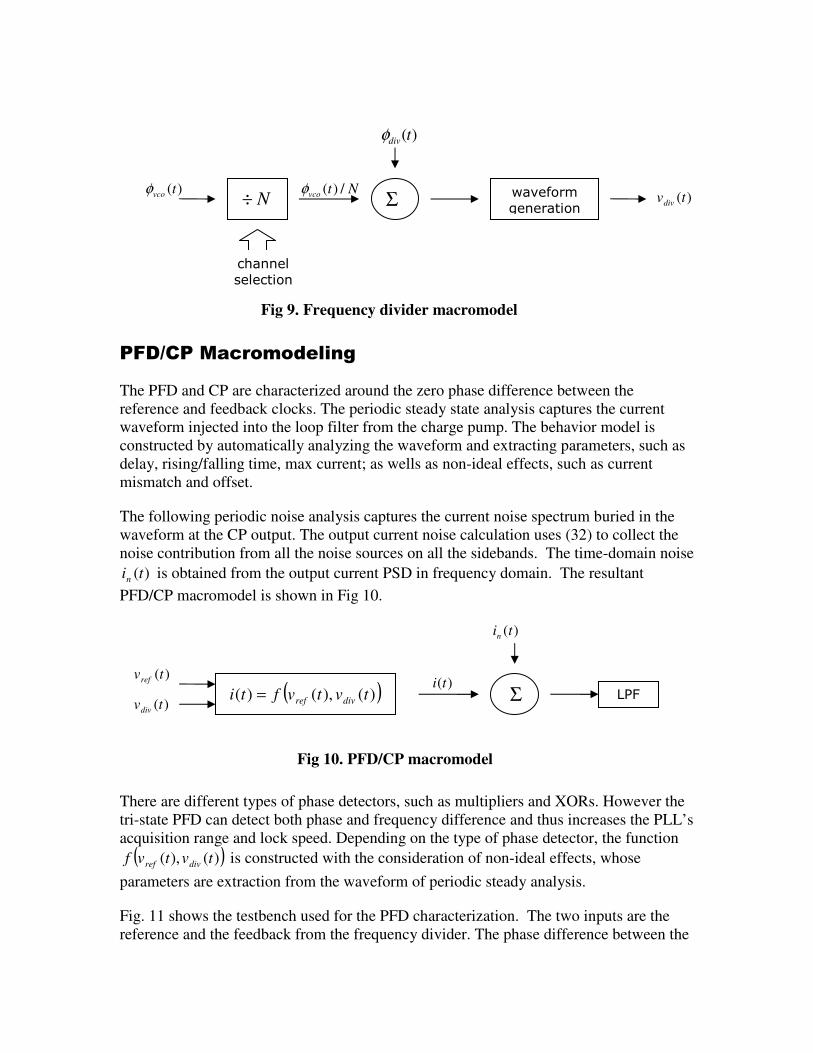
PFD/CP Macromodeling
The PFD and CP are characterized around the zero phase difference between the
reference and feedback clocks. The periodic steady state analysis captures the current
waveform injected into the loop filter from the charge pump. The behavior model is
constructed by automatically analyzing the waveform and extracting parameters, such as
delay, rising/falling time, max current; as wells as non-ideal effects, such as current
mismatch and offset.
The following periodic noise analysis captures the current noise spectrum buried in the
waveform at the CP output. The output current noise calculation uses (32) to collect the
noise contribution from all the noise sources on all the sidebands. The time-domain noise
)(tin is obtained from the output current PSD in frequency domain. The resultant
PFD/CP macromodel is shown in Fig 10.
There are different types of phase detectors, such as multipliers and XORs. However the
tri-state PFD can detect both phase and frequency difference and thus increases the PLL’s
acquisition range and lock speed. Depending on the type of phase detector, the function
( ))(),( tvtvf divref is constructed with the consideration of non-ideal effects, whose
parameters are extraction from the waveform of periodic steady analysis.
Fig. 11 shows the testbench used for the PFD characterization. The two inputs are the
reference and the feedback from the frequency divider. The phase difference between the
Fig 10. PFD/CP macromodel
)(tvref
( ))(),()( tvtvfti divref=)(ti
Σ)(tvdiv
)(tin
LPF
waveform
generation
)(tvcoφN÷
Ntvco /)(φΣ
)(tdivφ
)(tvdiv
channel
selection
Fig 9. Frequency divider macromodel

two inputs is swept around the zero. The load is a voltage source to emulate the effect of
the LPF. Fig 12 is a schematic view of a transistor-level PFD/CP inserted in the
testbench. It consists of two CMOS edge-triggered resettable D flipflops.
The steady state waveform and output current noise spectrum is show in Fig 13. In the
PFD, the AND gate activates the reset of the two D fliplops and thus the U and D net are
simultaneously high for a short period of time given by the delay of AND and flipflops.
The frequency of both inputs is 1MHz. Because the frequency translation in the noise
collection from different sidebands as shown in (32), the output noise shows the spikes at
each harmonics of 1MHz due to the frequency translation of 1/f noise.
Fig 11. PFD/CP testbench.
Fig 12. PFD/CP circuit

PLL Simulation
After the extraction of macromodel for VCO, FD, and PFD/CP, they are inserted in the
integer-N PLL testbench as shown in Fig 14. The divide ratio for FD is preset in the
combined VCO/FD macromodel for integer-N PLLs. The testbench for fractional-N
PLLs has similar layout except that it includes a Verilog-A behavior model implemented
for a dithered MASH sigma delta modulator.
Fig 13. (a) PFD/CP steady state, (b) output noise.
Fig 14. Integer-N PLL testbench.

The locking behavior can be observed by plotting the waveform at the VCO control net,
vtune. The waveforms at vtune from transient analysis of PLL macromodel and transient
analysis of transistor-level PLL are plotted in Fig 15. The two waveforms overlap and
output frequency settles to 2.48GHz. The transient analysis of PLL macromodels takes
only minutes and is hundreds of times faster than the transistor-level PLL simulation.
By turning on the noise in the macromodel of each block, we can simulate the phase-
noise and jitter behaviors of the PLL. While the phase-noise is the power spectrum
density at the PLL output (osc_p and osc_n), the jitter is defined as undesired
perturbation in the timing of the events. The commonly-used jitter in PLL is the referred
to as period jitter, which is defined as the standard deviation of the output period,
)var( 1 ii ttJ −= + , where it is the time of events, such as the threshold crossing.
In Fig 16, we compare the output spectrum from PLL macromodels and transistor-level
PLL, their noise spectrum and jitter value are very close, and predict the reference spurs
correctly. However the noise simulation of PLL macromodels takes only around 30mins;
while the transient noise analysis of transistor-level PLL takes several days.
Injecting a sinusoidal perturbation of 1mV magnitude at 4.7GHz into VCO’s vdd, we
should observe the spurs at ( nm 48.27.4 + )GHz and two strong spurs are located at 260M
and 520MHz plotted in Fig 16. For the purpose of comparison, we also plot the open
loop VCO phase-noise in black dotted line, which shows the noise below 40KHz is
filtered out due to the high-pass transfer function as VCO’s noise appears at the output.
Fig 15. Locking behavior.

Conclusion
In this article, we present a noise-aware PLL simulation methodology implemented in
SpectreRF®. We introduce various PLL simulation methods with the focus on the
voltage-domain model; and discuss the transistor-level simulation and model extraction
for each blocks, such as the VCO, the PFD/CP, and the FD. Floquet theory and eigen-
analysis is used to extract the eigenmodes; the amplitude and phase-components are
separated using the extracted eigen-modes as basis functions; and perturbation analysis is
applied to derive their corresponding equations. The periodic noise analysis is discussed
for each blocks, and their power spectrum densities are translated to time-domain noise
and included in their voltage domain models used in the top-level PLL simulation to
characterize the noise, jitter, interference, and locking behavior.
Reference:
J.L. Stensby. Phase-locked loops: Theory and applicaions. CRC Press, New York, 1997.
B. Razavi. RF Microelectronics. Prentice Hall, NJ 1998.
Fig 16. PLL phase noise and spurs.

K. Kundert. Predicting the Phase Noie and Jittr of PLL Based Frequency Synthesizers.
www.designers-guide.com, 2002
A. Denmir, A. Mehrotra, and J. Roychowdhury. Phase noise in oscillators: a unifying
theory and numerical methods for characterization. IEEE Tras. Circits and Systems. I:
Fundamental Theory and Aplications, 47(5):655-674, May 2000.
A. Demir and J. Roychowdhury. A reliable and efficient procedure for oscillator ppv
computation, with phase noise macromodelling application. IEEE Trans. Computer-
Aided Design of Integrated Circuits and Systes, 22(2):188-197, February 2003.
X. Lai, Y. Wan, and J. Roychowdhury. Fast pll simulation using nonlinear VCO
macromodels for accurate prediction of jitter and cycleslipping due to loop non-idealities
and supply noise. Proc IEEE Asia Souh-Pacifi Design Automatio Confrence, January
2005.
FX Kaertner. Analysis of white and f- noise in oscillators. Interational Journal of Circuit
Theory and. Application, 18:485-519, 1990.
Related Documents











