BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC MỎ - ĐỊA CHẤT TRẦN NGỌC ĐÔNG , PHÂN TÍCH LUẬN ÁN TIẾN SĨ KỸ THUẬT HÀ NỘI - 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC MỎ - ĐỊA CHẤT
TRẦN NGỌC ĐÔNG
, PHÂN TÍCH
LUẬN ÁN TIẾN SĨ KỸ THUẬT
HÀ NỘI - 2014

BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC MỎ - ĐỊA CHẤT
TRẦN NGỌC ĐÔNG
, PHÂN TÍCH
NGÀNH: KỸ THUẬT TRẮC ĐỊA – BẢN ĐỒ
MÃ SỐ: 62520503
LUẬN ÁN TIẾN SĨ KỸ THUẬT
NGƢỜI HƢỚNG DẪN KHOA HỌC
PGS.TS TRẦN KHÁNH
HÀ NỘI - 2014

i
LỜI CAM ĐOAN
Tôi xin cam đoan đây là công trình nghiên cứu của riêng tôi. Các số liệu,
kết quả trong luận án là trung thực và chƣa từng đƣợc ai công bố trong bất cứ một
công trình nào khác.
Tác giả luận án
Trần Ngọc Đông

ii
MỤC LỤC
LỜI CAM ĐOAN ........................................................................................................................... i
MỤC LỤC .................................................................................................................... ..................ii
DANH MỤC CÁC CHỮ VIẾT TẮT ..................................................................................... iv
DANH MỤC CÁC BẢNG .......................................................................................................... v
DANH MỤC CÁC HÌNH VẼ ................................................................................................. vii
MỞ ĐẦU .......................................................................................................................................... 1
Chƣơng 1. TỔNG QUAN VỀ QUAN TRẮC BIẾN DẠNG NỀN MÓNG VÀ TẦNG
HẦM CÔNG TRÌNH NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG
XÂY DỰNG ....................................................................................................................... 6
1.1. Tổng quan các công trình nghiên cứu ở ngoài nƣớc ........................................ 6
1.2. Tổng quan các công trình nghiên cứu ở trong nƣớc ........................................ 9
1.3. Đánh giá chung về tình hình nghiên cứu ....................................................... 12
1.4. Vấn đề tồn tại và định hƣớng nghiên cứu trong luận án ..................................... 13
Chƣơng 2. QUAN TRẮC ĐỘ LÚN NỀN MÓNG VÀ TẦNG HẦM CÔNG TRÌNH
NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG XÂY DỰNG ............ 14
2.1. Yêu cầu kỹ thuật quan trắc độ lún trong quá trình xây dựng móng và tầng
hầm nhà cao tầng ............................................................................................ 14
2.2. Quan trắc độ lún nền móng nhà cao tầng trong giai đoạn thi công móng và
tầng hầm bằng phƣơng pháp trắc địa ............................................................. 18
2.3. Quan trắc độ lún nền móng nhà cao tầng trong giai đoạn thi công xây dựng bằng
cảm biến .......................................................................................................... 27
2.4. Giải pháp kết hợp phƣơng pháp trắc địa và phƣơng pháp sử dụng cảm biến
quan trắc độ lún nền móng nhà cao tầng ........................................................ 32
Chƣơng 3. QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY NHÀ CAO TẦNG
TRONG GIAI ĐOẠN THI CÔNG MÓNG VÀ TẦNG HẦM ............................... 39
3.1. Yêu cầu kỹ thuật quan trắc chuyển dịch ngang tƣờng vây nhà cao tầng ....... 39
3.2. Quan trắc chuyển dịch ngang tƣờng vây bằng phƣơng pháp trắc địa ............ 43
3.3. Quan trắc chuyển dịch ngang tƣờng vây bằng cảm biến Inclinometer .................... 58

iii
3.4. Giải pháp quan trắc chuyển dịch ngang tƣờng vây bằng phƣơng pháp trắc địa
kết hợp với phƣơng pháp sử dụng cảm biến .................................................. 65
Chƣơng 4. PHÂN TÍCH BIẾN DẠNG NỀN MÓNG VÀ TẦNG HẦM CÔNG TRÌNH
NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG XÂY DỰNG ................. 70
4.1. Nguyên tắc thành lập mô hình chuyển dịch công trình theo số liệu quan trắc ... 70
4.2. Mô hình lún nền móng và chuyển dịch tƣờng vây trong không gian ............ 71
4.3. Mô hình lún và chuyển dịch nền móng nhà cao tầng theo thời gian ............. 80
4.4. Đánh giá ảnh hƣởng của các yếu tố gây nên chuyển dịch biến dạng công trình .... 83
4.5. P
công móng và tầng hầm ................................................................................. 86
4.6. Thành lập phần mềm phân tích biến dạng nền móng và tầng hầm ............................. 91
Chƣơng 5. THỰC NGHIỆM ..................................................................................................... 94
5.1. Thực nghiệm quan trắc chuyển dịch ngang tƣờng vây nhà cao tầng trong giai đoạn
thi công móng và tầng hầm ................................................................................ 94
5.2. Thực nghiệm thành lập mô hình lún nền móng công trình nhà cao tầng trong giai
đoạn thi công móng và tầng hầm ..................................................................... 107
5.3. Thực nghiệm xây dựng mô hình chuyển dịch ngang tƣờng vây.................. 113
5.4. Thực nghiệm phân tích tƣơng quan tuyến tính đơn giữa mực nƣớc ngầm và
độ lún nền nhà cao tầng ................................................................................ 119
5.5. Thực nghiệm dự báo lún nền công trình theo hàm đa thức ......................... 120
KẾT LUẬN VÀ KIẾN NGHỊ ................................................................................................ 123
DANH MỤC CÁC CÔNG TRÌNH KHOA HỌC CỦA TÁC GIẢ ĐÃ CÔNG BỐ
LIÊN QUAN ĐẾN NỘI DUNG LUẬN ÁN ......................................................... 124
TÀI LIỆU THAM KHẢO ....................................................................................................... 125
PHỤ LỤC .................................................................................................................................... 133
Phụ lục A. Số liệu quan trắc chuyển dịch ngang tƣờng vây công trình Cục tần số vô
tuyến điện bằng phƣơng pháp trắc địa kết hợp Inclinometer .............................. 134
Phụ lục B. Số liệu quan trắc chuyển dịch ngang tƣờng vây công trình Golden Palace chu
kỳ 01 và 02 bằng phƣơng pháp góc – cạnh ............................................................ 140
Phụ lục C. Một số máy toàn đạc điện tử có chế độ bắt mục tiêu tự động hiện nay .. …...146

iv
DANH MỤC CÁC CHỮ VIẾT TẮT
STT Chữ viết tắt Ý nghĩa
1 TĐĐT Toàn đạc điện tử
2 TCVN Tiêu chuẩn Việt Nam
3 GPS Global Positioning System
4 KHCN Khoa học Công nghệ
5 ADFB Analysis of Deformation of the Foundation and Basement
6 GOCA GNSS/GPS/LPS based Online Control and Alarm System

v
DANH MỤC CÁC BẢNG
Bảng 2.1. Kết quả quan trắc lún tại bàn 1 ............................................................................. 31
Bảng 2.2. Kết quả quan trắc lún tại bàn 2 ............................................................................. 31
Bảng 2.3. Kết quả quan trắc lún tại bàn 3 ............................................................................. 31
Bảng 2.4. Kết quả quan trắc lún tại đỉnh ống bằng thủy chuẩn hình học và đĩa từ ........... 36
Bảng 2.5. Kết quả quan trắc lún tại các bàn đo lún sau khi hiệu chỉnh sai số ................... 36
Bảng 2.6. Kết quả quan trắc lún tại bàn 1 bằng thủy chuẩn hình học kết hợp đĩa từ........ 37
Bảng 2.7. Kết quả quan trắc lún tại bàn 2 bằng thủy chuẩn hình học kết hợp đĩa từ........ 37
Bảng 2.8. Kết quả quan trắc lún tại bàn 3 bằng thủy chuẩn hình học kết hợp đĩa từ........ 38
Bảng 3.1. Sai số trung phƣơng cho phép quan trắc chuyển dịch ngang và các cấp đo . 42
Bảng 4.1. Phân cấp hƣ hại công trình theo biến dạng .......................................................... 89
Bảng 4.2. Trị khống chế thiết kế và giám sát biến dạng hố móng công trình ................... 90
Bảng 4.3. Tính năng của phần mềm ADFB ......................................................................... 92
Bảng 5.1. Chuyển dịch tâm miệng ống dẫn hƣớng đo bằng trắc địa và Inclinometer ..... 98
Bảng 5.2. Độ lệch tâm miệng ống dẫn hƣớng ...................................................................... 99
Bảng 5.3. Giá trị chuyển dịch của các điểm đo bằng Inclinometer sau khi hiệu chỉnh sai
số (điểm ICL5) .......................................................................................................... 100
Bảng 5.4. Giá trị chuyển dịch của các điểm đo bằng Inclinometer sau khi hiệu chỉnh
chuyển dịch của điểm gốc (điểm ICL5) ................................................................. 103
Bảng 5.5. Tọa độ và độ lún của các mốc quan trắc lún móng bè ..................................... 108
Bảng 5.6. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình ................... 109
Bảng 5.7. Tọa độ và độ lún của các mốc trên trục A ......................................................... 110
Bảng 5.8. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình ................... 111
Bảng 5.9. Tọa độ và độ lún của các mốc quan trắc ............................................................ 112
Bảng 5.10. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình ................. 113
Bảng 5.11. Số liệu quan trắc chuyển dịch ngang ............................................................... 114
Bảng 5.12. Kết quả so sánh chuyển dịch đo thực tế với chuyển dịch nội suy từ mô hình ...... 116
Bảng 5.13. Số liệu quan trắc chuyển dịch ngang cạnh AB của tƣờng vây ...................... 116
Bảng 5.14. Số liệu quan trắc chuyển dịch ngang tƣờng vây ............................................. 117

vi
Bảng 5.15. Kết quả so sánh chuyển dịch đo thực tế với chuyển dịch nội suy từ mô hình ...... 118
ƣ ........................ 119
11 .............................. 121
................................................. 121
................................................ 122
8 đến chu kỳ 11 ...... 122

vii
DANH MỤC CÁC HÌNH VẼ
Hình 2.1. Ảnh hƣởng của hố đào đến công trình lân cận [11] ............................................ 14
Hình 2.2. Biến dạng của khối đất xung quanh hố đào [80] ................................................. 15
Hình 2.3. Mốc đo lún sâu của các lớp đất ............................................................................. 21
Hình 2.4. Lắp đặt mốc quan trắc lún các lớp đất .................................................................. 21
Hình 2.5. Mặt bằng bố trí mốc đo lún bề mặt đất và đo lún các công trình lân cận ......... 22
Hình 2.6. Mặt bằng bố trí mốc đo lún công trình ................................................................. 24
Hình 2.7. Ống dẫn hƣớng và nam châm nhện ...................................................................... 27
Hình 2.8. Dây đo, nam châm nhện và nam châm đĩa .......................................................... 27
Hình 2.9. Quan trắc lún bằng đĩa từ [17] ............................................................................... 28
Hình 2.10. Lắp đặt mốc đo trồi đáy hố đào .......................................................................... 29
Hình 2.11. Biểu đồ kết quả quan trắc lún bằng đĩa từ .......................................................... 32
Hình 2.12. Quan trắc lún bằng thủy chuẩn hình học kết hợp đĩa từ ................................... 35
Hình 3.1. Biện pháp thi công Top-down ............................................................................... 39
Hình 3.2. Biện pháp thi công bán Top-down ....................................................................... 39
Hình 3.3. Biện pháp thi công đào mở .................................................................................... 39
Hình 3.4. Tƣờng chắn đất bằng bê tông cốt thép (tƣờng Barrette) - Tƣờng vây .............. 40
Hình 3.5. Tƣờng chắn đất bằng cừ thép ................................................................................ 40
Hình 3.6. Tƣờng chắn đất bằng cọc khoan nhồi ................................................................... 40
Hình 3.7. Tƣờng chắn đất bằng cọc xi măng đất .................................................................. 40
Hình 3.8. Tƣờng chắn đất bằng ván + sƣờn thép hình......................................................... 40
Hình 3.9. Tƣờng vây (tƣờng barrette) chống đỡ thành hố đào ........................................... 41
Hình 3.10. Thi công tƣờng vây .............................................................................................. 41
Hình 3.11. Cấu tạo mốc quan trắc chuyển dịch ngang đỉnh tƣờng vây ............................. 43
Hình 3.12. Sơ đồ lƣới tam giác quan trắc chuyển dịch ngang tƣờng vây .......................... 46
Hình 3.13. Sơ đồ lƣới đa giác quan trắc chuyển dịch tƣờng vây ........................................ 47
Hình 3.14. Sơ đồ lƣới giao hội quan trắc chuyển dịch tƣờng vây ...................................... 47
Hình 3.15. Sơ đồ hƣớng chuẩn quan trắc chuyển dịch ngang tƣờng vây .......................... 48
Hình 3.16. Quan trắc tự động chuyển dịch của tƣờng vây bằng máy TĐĐT ................... 50

viii
3.17. Điểm khống chế cơ sở ......................................................................................... 50
3.18. Gƣơng quan trắc gắn cố định trên tƣờng vây .................................................... 50
Hình 3.19. Tham số chuyển dịch ngang tƣờng vây ............................................................. 53
Hình 3.20. Đồ hình quan trắc tự động nhiều hơn 1 trạm máy ............................................ 55
Hình 3.21. Cấu tạo thiết bị đo chuyển dịch ngang Inclinometer ........................................ 58
Hình 3.22. Các hƣớng quy ƣớc trong quan trắc chuyển dịch ngang bằng Inclinometer .. 59
Hình 3.23. Sơ đồ tính toán trong đo chuyển dịch ngang bằng Inclinometer ..................... 59
Hình 3.24. Đồ thị chuyển dịch của điểm quan trắc bằng Inclinometer .............................. 61
Hình 3.25. Lắp đặt ống đo chuyển dịch ngang Inclinometer tại công trƣờng ................... 63
3 ng ............................ 66
Hình 3.27. Hệ tọa độ đo chuyển dịch .................................................................................... 66
Hình 4.1. Mô hình đối tƣợng quan trắc ................................................................................. 70
Hình 4.2. Tham số lún công trình dạng vùng [17] ............................................................... 72
Hình 4.3. Phễu lún nền đất yếu .............................................................................................. 74
Hình 4.4. Chuyển dịch giữa hai hệ tọa độ ............................................................................. 76
Hình 4.5. Biến dạng của công trình lân cận hố đào ............................................................. 87
Hình 4.6. Giao diện tổng quát phần mềm ADFB................................................................. 92
Hình 4.7. Giao diện modul tính toán tham số chuyển dịch ngang ..................................... 93
Hình 4.8. Giao diện modul xây dựng mô hình chuyển dịch ngang trong mặt phẳng ....... 93
5.1. Sơ ng vây công trình ............................... 94
i gian ........ 95
Hình 5.3. Hệ thống lƣới quan trắc chuyển dịch ngang tƣờng vây ...................................... 96
Hình 5.4. Thiết kế điểm quan trắc kết hợp Inclinometer và Toàn đạc điện tử .................. 97
Hình 5.5. Đồ thị của điểm quan trắc ICL5 trƣớc và sau khi hiệu chỉnh sai số ................ 102
Hình 5.6. Đồ thị điểm ICL5 trƣớc và sau khi hiệu chỉnh chuyển dịch của điểm gốc..... 106
Hình 5.7. Vị trí mặt bằng bố trí mốc quan trắc lún móng bè ............................................ 107
Hình 5.8. Vị trí mặt bằng bố trí mốc quan trắc lún công trình và lún nền ....................... 112
Hình 5.9. Bố trí mốc quan trắc chuyển dịch tƣờng vây công trình Golden Palace ......... 114

1
MỞ ĐẦU
1. Tính cấp thiết của đề tài
Trong những năm gần đây cùng với tốc độ phát triển của các đô thị, đặc biệt
là ở các thành phố lớn việc đầu tƣ xây dựng các công trình nhà cao tầng phát triển
khá nhanh. Trong thiết kế nhà cao tầng hiện nay ở nƣớc ta, hầu hết đều có tầng hầm
để giải quyết vấn đề đỗ xe và các hệ thống kỹ thuật của tòa nhà. Phổ biến là các
công trình cao từ 10 đến 30 tầng đƣợc thiết kế có từ 1 đến 3 tầng hầm để đáp ứng
yêu cầu sử dụng của Chủ đầu tƣ trong hoàn cảnh công trình bị khống chế chiều cao
và khuôn viên đất có hạn. Việc xây dựng tầng hầm trong nhà cao tầng đã tỏ ra có
hiệu quả tốt về mặt công năng sử dụng và phù hợp với chủ trƣơng quy hoạch đô thị
trong tình hình phát triển đô thị và gia tăng dân số hiện nay. Tuy nhiên, khi đào đất
làm tƣờng cừ hố đào, khi thi công móng và tầng hầm nhà cao tầng trong thời gian
gần đây không ít công trình lân cận hố đào đã bị sự cố nặng nề, gây nhiều tổn thất
về kinh tế và gây ra bức xúc trong xã hội. Những tồn tại đó phần lớn là do không
kịp thời theo dõi quan trắc và phân tích những tác động do quá trình thi công móng
và tầng hầm có thể gây ra.
Khi thi công hố đào sâu để thi công móng và tầng hầm sẽ làm thay đổi trạng
thái ứng suất dẫn tới biến dạng đất nền xung quanh khu vực hố đào và có thể làm
thay đổi mực nƣớc ngầm dẫn đến nền đất bị chuyển dịch và có thể gây lún, hƣ hỏng
công trình lân cận hố đào nếu không có giải pháp thích hợp để chống đỡ thành hố
đào. Đối với các nhà cao tầng có tầng hầm đƣợc xây chen trong khu dân cƣ thì
tƣờng vây là giải pháp thích hợp để chống đỡ thành hố đào. Do vậy, trong quá trình
thi công móng và tầng hầm cần tiến hành quan trắc để xem thử những bức tƣờng
chắn hố đào có bị chuyển dịch hay không khi đào đất ở giữa. Mặt khác, không chỉ
quan trắc tƣờng vây mà cần phải quan trắc cả khu vực xung quanh công trình (nền
đất xung quanh hố đào, các công trình lân cận hố đào, …). Những thông số quan
trắc này giúp đơn vị thi công công trình và các cơ quan chức năng biết trƣớc đƣợc
những tác động xấu sẽ xảy ra để từ đó cân nhắc gia cố thêm tƣờng hay không hoặc
thay đổi phƣơng pháp thi công.

2
Vấn đề quan trắc, phân tích biến dạng nền móng và tầng hầm nhà cao tầng
trong giai đoạn thi công xây dựng trở nên cấp thiết. Tuy nhiên, cho đến nay vẫn chƣa
đƣợc chú trọng thích đáng, chƣa có một nghiên cứu thấu đáo, hoàn chỉnh và một giải
pháp kỹ thuật nào đƣợc đề xuất. Vì thế, nghiên cứu phƣơng pháp quan trắc, phân tích
biến dạng nền móng và tầng hầm công trình nhà cao tầng trong giai đoạn thi công xây
dựng là rất cần thiết. Góp phần không chỉ nhằm an toàn cho toàn cao ốc mà còn cả
các công trình lân cận, con ngƣời và các sinh hoạt bình thƣờng của cƣ dân.
2. Mục đích, đối tượng và phạm vi nghiên cứu
- Mục đích nghiên cứu của luận án nhằm góp phần phát triển và hoàn thiện
phƣơng pháp quan trắc, phân tích biến dạng, đánh giá và mô hình hóa quá trình chuyển
dịch của nền móng và tầng hầm nhà cao tầng trong giai đoạn thi công xây dựng.
- Đối tƣợng nghiên cứu là: phƣơng pháp quan trắc, phân tích biến dạng nền
móng và tầng hầm của các công trình nhà cao tầng ở Việt Nam.
- Phạm vi nghiên cứu của luận án bao gồm: Nghiên cứu phƣơng pháp trắc
địa, phƣơng pháp sử dụng cảm biến quan trắc biến dạng nền móng và tƣờng vây
nhà cao tầng; nghiên cứu kết hợp phƣơng pháp trắc địa và phƣơng pháp sử dụng
cảm biến để nhằm nâng cao chất lƣợng và hiệu quả quan trắc biến dạng nền móng
và tầng hầm; phân tích, đánh giá và mô hình hóa quá trình chuyển dịch của nền
móng và tƣờng vây nhà cao tầng trong giai đoạn thi công móng và tầng hầm.
3. Nội dung nghiên cứu
1- Nghiên cứu kết hợp phƣơng pháp trắc địa với phƣơng pháp sử dụng cảm
biến để quan trắc lún nền móng và chuyển dịch ngang tƣờng vây công trình nhà cao
tầng trong giai đoạn thi công móng và tầng hầm.
2- Nghiên cứu ứng dụng hệ thống quan trắc tự động để quan trắc liên tục
chuyển dịch của tƣờng vây.
3- Xây dựng mô hình chuyển dịch, phân tích, đánh giá, dự báo chuyển dịch
nền móng và tƣờng vây nhà cao tầng.
4- Lập phần mềm phân tích biến dạng nền móng và tầng hầm nhà cao tầng.

3
4. Phương pháp nghiên cứu
- Phƣơng pháp thống kê: Tìm kiếm, thu thập tài liệu và cập nhật các thông
tin trên mạng internet và các thƣ viện.
- Phƣơng pháp phân tích: nghiên cứu lý thuyết quan trắc biến dạng công
trình, các thuật toán xử lý số liệu đo đạc ngoại nghiệp, làm cơ sở lý luận, thiết kế dữ
liệu, mô hình toán, viết thuật toán và chƣơng trình.
- Phƣơng pháp thực nghiệm: Tiến hành các thực nghiệm cụ thể để chứng
minh lý thuyết, khẳng định tính đúng đắn, khả thi và đi đến kết luận.
- Phƣơng pháp so sánh: Đối chiếu với các kết quả nghiên cứu khác hoặc các
nội dung liên quan để so sánh, đánh giá, đƣa ra giải pháp phù hợp.
- Phƣơng pháp ứng dụng tin học: Xây dựng các thuật toán và lập các chƣơng
trình tính toán trên máy tính.
- Phƣơng pháp toán học: Tập hợp các quy luật, định lý toán học để chứng
minh một số công thức phục vụ cho việc tính toán và lập chƣơng trình máy tính.
5. Ý nghĩa khoa học và thực tiễn của luận án
Ý nghĩa khoa học: Góp phần phát triển và hoàn thiện phƣơng pháp quan trắc,
phân tích biến dạng, đánh giá và mô hình hóa quá trình chuyển dịch của nền móng
và tầng hầm nhà cao tầng trong giai đoạn thi công xây dựng.
Ý nghĩa thực tiễn: Các kết quả nghiên cứu có thể đƣợc ứng dụng để quan
trắc, phân tích, đánh giá và dự báo biến dạng nền móng và tầng hầm nhà cao tầng
trong giai đoạn thi công xây dựng ở thực tế sản xuất. Góp phần phòng ngừa sự cố
đối với công trình và các công trình lân cận.
6. Các luận điểm bảo vệ
Luận điểm thứ nhất: Giải pháp kết hợp phƣơng pháp trắc địa với phƣơng
pháp sử dụng cảm biến nhƣ đề xuất trong luận án cho phép nâng cao hiệu quả công
tác quan trắc biến dạng nền móng và tƣờng vây nhà cao tầng.
Luận điểm thứ hai: Mô hình biến dạng công trình thành lập trên cơ sở số liệu
quan trắc cho phép đánh giá độ lún cũng nhƣ chuyển dịch ngang nền móng, tƣờng
vây nhà cao tầng theo thời gian, trong không gian và đánh giá sự phụ thuộc giữa
biến dạng với tác nhân gây ra biến dạng đó.

4
7. Các điểm mới của luận án
1- Đề xuất giải pháp kết hợp phƣơng pháp trắc địa với phƣơng pháp sử dụng
cảm biến để nâng cao chất lƣợng và hiệu quả công tác quan trắc biến dạng nền
móng và tƣờng vây nhà cao tầng.
2- Đề xuất thành lập các mô hình biến dạng nền móng và tƣờng vây nhà cao
tầng theo thời gian, trong không gian và đánh giá sự phụ thuộc giữa biến dạng với
các tác nhân gây ra biến dạng.
3- Thành lập phần mềm phân tích biến dạng nền móng và tầng hầm công
trình nhà cao tầng.
8. Cấu trúc và nội dung luận án
Cấu trúc luận án gồm ba phần:
Phần mở đầu: Giới thiệu tổng quan về luận án, tính cấp thiết, mục đích, ý
nghĩa, phƣơng pháp, nội dung nghiên cứu của luận án, đồng thời đƣa ra các luận
điểm bảo vệ và điểm mới của luận án.
Phần nội dung nghiên cứu chính được trình bày trong 5 chương:
Chương 1: Tổng quan về quan trắc biến dạng nền móng và tầng hầm công
trình nhà cao tầng trong giai đoạn thi công xây dựng.
Chương 2: Quan trắc độ lún trong quá trình xây dựng nền móng và tầng hầm
công trình nhà cao tầng.
Chương 3: Quan trắc chuyển dịch ngang tƣờng vây nhà cao tầng trong giai
đoạn thi công móng và tầng hầm.
Chương 4: Phân tích biến dạng nền móng và tầng hầm công trình nhà cao
tầng trong giai đoạn thi công xây dựng.
Chương 5: Thực nghiệm.
Phần kết luận: Tổng hợp lại những vấn đề nghiên cứu trong luận án, đƣa ra
những nhận xét, đánh giá các giải pháp nâng cao hiệu quả của công tác quan trắc
biến dạng nền móng và tầng hầm công trình nhà cao tầng trong giai đoạn thi công
xây dựng cũng nhƣ định hƣớng cho phát triển trong tƣơng lai.

5
9. Lời cảm ơn
Trƣớc hết, nghiên cứu sinh xin đƣợc bày tỏ lòng biết ơn chân thành và sâu
sắc đến ngƣời hƣớng dẫn khoa học PGS.TS Trần Khánh đã tận tình hƣớng dẫn, giúp
đỡ và cho nhiều chỉ dẫn khoa học có giá trị giúp nghiên cứu sinh hoàn thành các nội
dung của luận án.
Nghiên cứu sinh xin cảm ơn các thầy, cô trong Khoa Trắc địa - Trƣờng đại
học Mỏ - Địa chất, các đồng nghiệp trong ngành Trắc địa và đặc biệt là các thầy, cô
trong Bộ môn Trắc địa công trình đã giúp đỡ và có những ý kiến đóng góp quý báu
cho tác giả hoàn thiện nội dung của luận án.
Nghiên cứu sinh xin chân thành cảm ơn các đồng nghiệp ở Trung tâm Tƣ vấn
Trắc địa và Xây dựng - Viện KHCN Xây dựng đã tận tình giúp đỡ cho tác giả đƣợc
tiếp cận và tham gia vào thực tế sản xuất để có đƣợc các số liệu thực nghiệm trong
luận án.
Nghiên cứu sinh xin chân thành cảm ơn tất cả những sự giúp đỡ quý báu đó.

6
Chương 1
TỔNG QUAN VỀ QUAN TRẮC BIẾN DẠNG NỀN MÓNG VÀ TẦNG HẦM
CÔNG TRÌNH NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG XÂY DỰNG
1.1. TỔNG QUAN CÁC CÔNG TRÌNH NGHIÊN CỨU Ở NGOÀI NƢỚC
Trong điều kiện đô thị khi xây dựng ngầm thƣờng gây ra nhiều hệ lụy xấu
chẳng những đối với công trình ở gần nhƣ lún, nứt, thậm chí sụp đổ mà còn làm
thay đổi chế độ thủy động của nƣớc dƣới đất. Đối với quá trình đào đất để thi công
móng và tầng hầm công trình nhà cao tầng khi lấy đi một lƣợng đất nào đó sẽ làm
thay đổi trạng thái ứng suất dẫn tới biến dạng của khối đất quanh hố đào. Đất sẽ
chuyển dịch về phía hố đào, độ lớn của chuyển dịch phụ thuộc vào chất lƣợng của
kết cấu chống giữ, loại đất, khoảng cách cũng nhƣ vị trí và tải trọng của công trình
lân cận. Tổng hợp các loại chuyển dịch này sẽ làm mặt đất ở lân cận hố đào lún
xuống. Nếu trong vùng ảnh hƣởng này có công trình thì công trình sẽ bị biến dạng.
Vì vậy, quan trắc biến dạng nền móng công trình nhà cao tầng trong quá trình thi
công móng và tầng hầm là đối tƣợng nghiên cứu của nhiều nhà khoa học tại các
viện nghiên cứu và các trƣờng đại học lớn trên thế giới. Các hƣớng nghiên cứu để
đảm bảo hiệu quả cho công tác quan trắc biến dạng nền móng công trình nhà cao
tầng bao gồm:
1- Quan trắc chuyển dịch nền móng nhà cao tầng trong giai đoạn thi công móng
và tầng hầm
Công tác quan trắc chuyển dịch nền móng nhà cao tầng trong giai đoạn thi
công móng và tầng hầm chủ yếu là quan trắc trong quá trình thi công hố đào để thi
công móng và tầng hầm. Các hƣớng nghiên cứu là xác định nội dung quan trắc và
phƣơng pháp quan trắc.
- Xác định nội dung quan trắc: nội dung quan trắc thƣờng đƣợc nêu trong các
tiêu chuẩn thiết kế, thi công hoặc quản lý. Ví dụ, theo JGJ 120 - 99 [82], nội dung
quan trắc trong quá trình thi công hố đào bao gồm: quan trắc chuyển dịch theo
phƣơng ngang của kết cấu chống giữ; biến dạng của đƣờng ống ngầm và công trình

7
xung quanh; mực nƣớc ngầm; nội lực trong cọc, tƣờng; lực kéo trong đất; lực dọc
trong thanh chống; biến dạng trụ đứng; độ lún theo chiều sâu của các lớp đất và độ
trồi đất ở đáy hố móng; áp lực ngang trên bề mặt kết cấu chống giữ.
- Phƣơng pháp quan trắc: phƣơng pháp quan trắc chuyển dịch trong quá trình
thi công hố đào phục vụ thi công móng và tầng hầm gồm phƣơng pháp trắc địa và
phƣơng pháp sử dụng cảm biến. Phƣơng pháp trắc địa thƣờng dùng để quan trắc
chuyển dịch bề mặt còn phƣơng pháp sử dụng cảm biến dùng để quan trắc chuyển
dịch theo chiều sâu. Trong phƣơng pháp sử dụng cảm biến thiết bị dùng để đo
chuyển dịch ngang của kết cấu chống giữ thành hố đào là Inclinometer còn thiết bị
quan trắc lún theo chiều sâu là Extensometer.
Về vấn đề quan trắc chuyển dịch nền móng nhà cao tầng có các công trình
nghiên cứu [46], [47], [48], [49], [52], [53], [54].
2- Phân tích đánh giá kết quả quan trắc chuyển dịch nền móng và tầng hầm
nhà cao tầng
Công tác phân tích đánh giá kết quả quan trắc biến dạng công trình gồm có:
- Phân tích đánh giá kết quả quan trắc biến dạng công trình trong không gian
ba chiều.
- Phân tích đánh giá kết quả quan trắc biến dạng công trình theo thời gian, từ
đó đƣa ra đƣợc biến dạng công trình trong tƣơng lai.
- Phân tích đánh giá ảnh hƣởng của các nhân tố tác động đến biến dạng công trình.
Trong quan trắc biến dạng nền móng và tầng hầm nhà cao tầng, các hƣớng
nghiên cứu chủ yếu tập trung vào nâng cao độ chính xác quan trắc, nâng cao mức
độ tin cậy của giá trị quan trắc và phân tích số liệu quan trắc nhằm kiểm soát sự cố
có thể xảy ra đối với công trình và công trình lân cận.
P.Erik Mikkelsen (2003) đã nghiên cứu phân tích dữ liệu để nâng cao độ
chính xác đo chuyển dịch ngang bằng thiết bị Inclinometer [60].
Christian Moormann (2004) dựa trên kết quả quan trắc 530 công trình hố đào
sâu trong đất mềm yếu, đề xuất trị cảnh báo và giá trị giới hạn về chuyển dịch

8
ngang của tƣờng và chuyển dịch đứng của đất lân cận hố đào, dùng chúng để kiểm
soát và phòng ngừa những hƣ hại có thể xảy ra đối với công trình ở gần hố đào [50].
Sự cố công trình thực tế về hố móng sâu đƣợc phân tích dựa trên kết quả
quan trắc đƣợc thiết kế và lắp đặt trƣớc khi thi công tầng hầm và bổ sung kịp thời
trong quá trình diễn biến sự cố. Phƣơng pháp kiểm soát sự cố khá chủ động nhờ
phân tích một cách khoa học các thông tin từ quan trắc [53].
Richard N. Hwang, Za-Chieh Moh and C. H. Wang (2007) đã chỉ ra rằng:
biến động điểm đáy của ống Inclinometer là không thể tránh khỏi, thậm chí kể cả khi
đáy ống đƣợc lắp đặt trong tầng cuội sỏi. Trong đo chuyển dịch ngang bằng cách áp
dụng các điểm đáy ống nhƣ điểm tham chiếu có thể sẽ là sai lầm. Các điểm ở phía trên
của ống dẫn hƣớng cần đƣợc theo dõi để đọc, có thể đƣợc hiệu chỉnh cho phù hợp [62].
A.Rahman, M.Taha (2005), Inclinometers là những công cụ tốt để đo lƣờng
và quan trắc sự biến dạng ngang của đất do đào đắp. Tuy nhiên ống dẫn hƣớng sử
dụng phải đủ sâu để có đƣợc kết quả đáng tin cậy. Vì lý do này ống dẫn hƣớng
Inclinometers lắp đặt bên trong tƣờng vây phải đƣợc lắp đặt ít nhất là đến hết chiều
sâu bức tƣờng hoặc thậm chí sâu hơn. Đó là khuyến cáo để lắp đặt các
Inclinometers nhằm thực hiện các mô hình phân tích chính xác hơn về thông số
chuyển dịch biến dạng của đất bên ngoài của bức tƣờng ngăn hoặc cho tiêu chuẩn
thiết kế tốt hơn [47].
3- Tự động hóa quá trình quan trắc và xử lý số liệu
Về mặt tự động hóa quá trình quan trắc và xử lý số liệu, ngoài các hãng
sản xuất thiết bị và phần mềm quan trắc tự động, các tác giả Reiner Jäger,
Simone Kälber, Manuel Oswald and Martin Bertges (2006) đã xây dựng hệ
thống điều khiển và cảnh báo trực tuyến dựa trên GNSS (hệ thống vệ tinh dẫn
đƣờng toàn cầu), GPS (hệ thống định vị toàn cầu), LPS (hệ thống định vị cục bộ)
để quan trắc chuyển dịch biến dạng công trình một cách liên tục [61]. Ngoài ra,
tự động hóa quan trắc và xử lý số liệu có các công trình nghiên cứu [51], [55],
[57], [58], [63].

9
1.2. TỔNG QUAN CÁC CÔNG TRÌNH NGHIÊN CỨU Ở TRONG NƢỚC
Ở nƣớc ta cuối những năm 1980 việc quan trắc biến dạng các công trình xây
dựng đã đƣợc nhiều ngành quan tâm. Điều đó xuất phát từ một thực tế là ngày càng
có nhiều công trình xây dựng đòi hỏi độ chính xác cao trong thi công xây lắp và
phải đảm bảo một yêu cầu nghiêm ngặt trong khai thác và vận hành chúng. Các số
liệu đầy đủ chính xác về sự biến dạng của công trình là những tài liệu hữu ích quan
trọng. Dựa vào các số liệu này chúng ta không chỉ khẳng định đƣợc độ an toàn, bền
vững của công trình mà còn cho phép đƣa ra những dự đoán về độ biến dạng của
công trình trong tƣơng lai, giúp cho công tác nghiên cứu và xử lý các sự cố của
công trình nhƣ lún, nghiêng, chuyển dịch một cách hợp lý về khoa học cũng nhƣ
hiệu quả về kinh tế.
Năm 1985 đã có tiêu chuẩn TCVN 3972:1985 “Công tác trắc địa trong xây
dựng công trình” [34] đã nói đến quan trắc biến dạng công trình. Từ đó đến nay đã
có nhiều công trình nghiên cứu khoa học các cấp, một số luận án, luận văn nghiên
cứu về quan trắc biến dạng công trình để hoàn thiện công tác quan trắc công trình,
đáp ứng đƣợc yêu cầu quan trắc đối với các công trình cụ thể.
1- Nghiên cứu về lý thuyết
- Nghiên cứu phƣơng pháp và quy trình quan trắc biến dạng công trình:
Quy trình công nghệ quan trắc chuyển dịch biến dạng công trình đã đƣợc tác
giả Trần Khánh (1991) thể hiện trong báo cáo đề tài nhánh của đề tài cấp nhà nƣớc
46A-05-01 [13].
Đã có nhiều nhà khoa học trong nƣớc nghiên cứu, ứng dụng công nghệ, máy
móc và thiết bị nhằm nâng cao độ chính xác trong công tác quan trắc chuyển dịch
công trình, giảm thiểu về kinh phí, thời gian quan trắc, những vấn đề này thể hiện
trong các công trình nghiên cứu [3], [4], [5], [9], [13], [27], [28], [29]. Đã có nhiều
công trình nghiên cứu trở thành tiêu chuẩn quốc gia để làm cơ sở cho quan trắc biến
dạng công trình [34], [35], [36], [37], [38].
- Nghiên cứu về thiết kế lƣới và xử lý số liệu quan trắc biến dạng công trình:

10
Để mạng lƣới quan trắc biến dạng đáp ứng đƣợc yêu cầu về độ chính xác và
yêu cầu về thời gian thì hệ thống lƣới quan trắc cần đƣợc thiết kế tối ƣu.
Về mặt thiết kế tối ƣu lƣới quan trắc chuyển dịch biến dạng công trình đã có
công trình nghiên cứu của tác giả Nguyễn Quang Phúc (2006). Trong công trình
nghiên cứu này đã trình bày đầy đủ về đặc điểm công tác thiết kế hệ thống lƣới
quan trắc chuyển dịch biến dạng công trình và những kết quả nghiên cứu thiết kế tối
ƣu lƣới quan trắc biến dạng công trình trên máy tính điện tử. Các nghiên cứu cũng
cho thấy, việc thiết kế tối ƣu lƣới quan trắc biến dạng trên máy tính điện tử là đơn
giản và hiệu quả [20].
Trong công trình nghiên cứu [29] cũng đã đề cập đến thiết kế tối ƣu độ chính
xác lƣới và thiết kế tối ƣu chi phí thi công lƣới.
Công tác xử lý và phân tích số liệu quan trắc là công việc rất quan trọng góp
phần nâng cao tính chính xác của công tác đánh giá độ biến dạng công trình. Vấn đề
này đã đƣợc các nhà khoa học trong nƣớc khảo sát và thể hiện qua các công trình
nghiên cứu [2], [10], [15], [19], [32]. Ví dụ, trong công trình [15] đã đề xuất các
biện pháp cần thiết để làm giảm tác động của các nguồn sai số số liệu gốc và sai số
hệ thống trị đo đến kết quả đo biến dạng.
- Nghiên cứu ứng dụng các thiết bị hiện đại trong quan trắc biến dạng công trình:
Trong phƣơng pháp trắc địa truyền thống để xác định đƣợc chuyển dịch
ngang và chuyển dịch thẳng đứng của công trình thƣờng phải quan trắc riêng theo
các phƣơng pháp khác nhau. Nhƣ vậy không những chu kỳ quan trắc kéo dài, khối
lƣợng công tác lớn mà còn tăng thêm khó khăn cho phân tích biến dạng. Do đó cần
phải nghiên cứu ứng dụng công nghệ mới, hiện đại nhƣ cảm biến, hệ thống quan
trắc tự động vào quan trắc chuyển dịch biến dạng công trình để cung cấp thông tin
chuyển dịch 3 chiều của điểm quan trắc, số liệu quan trắc liên tục, tự động hóa từ
khâu thu thập, truyền, quản lý số liệu đến việc phân tích và dự báo chuyển dịch biến
dạng, đạt đến mục đích giám sát điều khiển tức thời từ xa, liên quan đến vấn đề này
đã có các công trình nghiên cứu [3], [5], [32].
11
- Nghiên cứu phân tích biến dạng công trình:
Từ kết quả quan trắc biến dạng công trình tiến hành phân tích biến dạng công
trình nhằm đánh giá mức độ biến dạng của công trình cũng nhƣ phân tích các yếu tố
ảnh hƣởng đến biến dạng công trình là hết sức cần thiết, góp phần phòng chánh sự
cố công trình có thể xảy ra, liên quan đến vấn đề này có các công trình nghiên cứu
[18], [19], [29], [32].
- Nghiên cứu ứng dụng tin học vào xử lý số liệu quan trắc biến dạng công trình:
Ngoài việc nghiên cứu các phƣơng pháp quan trắc, quy trình quan trắc,
phƣơng pháp thiết kế lƣới quan trắc, xử lý số liệu quan trắc, phân tích biến dạng
công trình thì công tác nghiên cứu ứng dụng tin học vào quan trắc biến dạng công
trình là rất cần thiết, góp phần tự động hóa tính toán trên máy tính điện tử, trong
lĩnh vực nghiên cứu này có các công trình nghiên cứu [8], [21], [29].
2- Triển khai công tác quan trắc nền móng nhà trong sản xuất
- Xác định nội dung quan trắc: nội dung quan trắc thƣờng đƣợc nêu trong các
tiêu chuẩn thiết kế, thi công hoặc quản lý. Theo TCVN 9363:2012 [36], nội dung
quan trắc trong quá trình thi công hố đào bao gồm: lún bề mặt đất xung quanh hố
đào; chuyển dịch ngang thành hố đào; mực nƣớc ngầm; bùng nền đáy hố đào;
chuyển dịch đỉnh tƣờng cừ; áp lực đất tác dụng vào tƣờng cừ; chuyển dịch và ứng
suất trong các thanh chống của hệ chống đỡ; biến dạng nhà và công trình lân cận.
- Phƣơng pháp quan trắc: phƣơng pháp quan trắc chuyển dịch trong quá trình
thi công hố đào phục vụ thi công móng và tầng hầm gồm phƣơng pháp trắc địa và
phƣơng pháp sử dụng cảm biến. Phƣơng pháp trắc địa thƣờng dùng để quan trắc
chuyển dịch bề mặt còn phƣơng pháp sử dụng cảm biến dùng để quan trắc chuyển
dịch theo chiều sâu. Trong phƣơng pháp sử dụng cảm biến thiết bị dùng để đo
chuyển dịch ngang của kết cấu chống giữ thành hố đào là Inclinometer còn thiết bị
quan trắc lún theo chiều sâu là Extensometer (đĩa từ).
Công tác quan trắc nền móng nhà cao tầng có các công trình nghiên cứu [1],
và một số công trình nghiên cứu đã trở thành TCVN nhƣ [34], [35], [37], [38].

12
Trong [1] đã chỉ ra rằng ứng dụng công nghệ quan trắc Địa kỹ thuật trong
thi công xây dựng công trình có thể dự báo và phòng ngừa sự cố xảy ra cho chính
công trình đang thi công cũng nhƣ các công trình lân cận; mặt khác, quan trắc Địa
kỹ thuật còn góp phần điều chỉnh biện pháp kỹ thuật thi công công trình, trong
một số trƣờng hợp dẫn đến điều chỉnh hồ sơ thiết kế cho phù hợp với điều kiện
thực tế. Quan trắc Địa kỹ thuật còn góp phần tạo cơ sở, bằng chứng kỹ thuật để
giải quyết tranh chấp pháp lý xảy ra khi có khiếu kiện hƣ hỏng công trình do xây
dựng công trình khác. Trong công trình [1] đã hƣớng dẫn những nguyên lý cơ bản
để thực hiện quan trắc Địa kỹ thuật trong quá trình thi công nền móng nhà cao
tầng, thi công các công trình ngầm và hố đào sâu của các công trình xây dựng tại
Hà Nội, bao gồm: nội dung công tác quan trắc; thiết kế chƣơng trình quan trắc;
nguyên lý lắp đặt và hoạt động của các thiết bị quan trắc; chuẩn bị quan trắc và
tiến hành quan trắc.
Trong [37] đã hƣớng dẫn về công tác đo chuyển dịch khi xây dựng nhà cao
tầng bằng phƣơng pháp trắc địa.
1.3. ĐÁNH GIÁ CHUNG VỀ TÌNH HÌNH NGHIÊN CỨU
Qua tìm hiểu tình hình nghiên cứu tổng quan của công tác quan trắc biến
dạng trên thế giới và trong nƣớc có thể nhận thấy nhƣ sau:
Trên thế giới: Nhìn chung các nghiên cứu của thế giới về lĩnh vực này chƣa
phù hợp với điều kiện Việt Nam (đất yếu, xây chen, yếu tố xây dựng, ...)
Ở Việt Nam: Hạn chế về năng lực sản xuất thiết bị đo đạc chính xác cao, nên
chủ yếu sử dụng các công nghệ hiện đại nhập khẩu, chƣa có điều kiện chế tạo các
thiết bị đo chuyên dùng cho công tác quan trắc biến dạng công trình.
Tại các công trình lớn ở Việt Nam, việc quan trắc biến dạng chủ yếu vẫn
thực hiện theo chu kỳ với các thiết bị và công nghệ truyền thống, việc quan trắc liên
tục tại một số công trình mới trong giai đoạn thử nghiệm (các công trình có áp dụng
hệ thống quan trắc tự động hiện nay vẫn do đối tác nƣớc ngoài thực hiện).

13
Trong công tác xử lý số liệu quan trắc biến dạng công trình đã áp dụng
phƣơng pháp chặt chẽ và công nghệ tiên tiến đối với hệ thống lƣới quan trắc, tuy
vậy việc phân tích kết quả quan trắc chƣa đƣợc chú ý nhiều.
Trong quan trắc biến dạng phục vụ thi công móng và tầng hầm nhà cao tầng
hiện nay vẫn chƣa kết hợp liên ngành để xử lý số liệu quan trắc. Mặt khác, công tác
phân tích kết quả quan trắc vẫn còn bỏ ngỏ hoặc chƣa đƣợc quan tâm đúng mức.
Trong thực tế sản xuất đã ứng dụng công nghệ tin học để tự động hóa quá
trình tính toán. Các phần mềm đang đƣợc ứng dụng trong sản xuất mới chỉ giải
quyết đƣợc các nhiệm vụ đơn lẻ trong quá trình xử lý số liệu, chƣa có phần mềm xử
lý tổng thể các vấn đề đặt ra đối với công tác quan trắc biến dạng công trình.
1.4. VẤN ĐỀ TỒN TẠI VÀ ĐỊNH HƢỚNG NGHIÊN CỨU TRONG LUẬN ÁN
Hiện nay phƣơng pháp trắc địa và phƣơng pháp sử dụng cảm biến để quan
trắc biến dạng nền móng và tầng hầm nhà cao tầng vẫn đang tách biệt với nhau. Vì
vậy, nghiên cứu sử dụng kết hợp phƣơng pháp trắc địa với phƣơng pháp sử dụng
cảm biến nhằm nâng cao chất lƣợng và hiệu quả công tác quan trắc biến dạng nền
móng nhà cao tầng là việc làm cần thiết.
Nghiên cứu ứng dụng hệ thống quan trắc tự động để tự động quan trắc liên
tục chuyển dịch của tƣờng vây công trình nhà cao tầng nhằm góp phần phòng ngừa
sự cố có thể xảy ra trong quá trình thi công hố đào là cần thiết.
Công tác quan trắc biến dạng nền móng, tƣờng vây nhà cao tầng, quan trắc
các công trình lân cận hố đào, quan trắc độ lún công trình chính trong quá trình thi
công móng và tầng hầm nhằm mục đích đảm bảo an toàn cho công trình và các
công trình lân cận. Thực tế cho thấy, hiện nay các số liệu quan trắc trong giai đoạn
này mới chỉ ở khâu cung cấp số liệu chứ vẫn chƣa có những phân tích đánh giá cụ
thể ảnh hƣởng của quá trình thi công hố đào đến các công trình lân cận. Do đó cần
tiến hành nghiên cứu, phân tích số liệu quan trắc và thành lập mô hình chuyển dịch
nền móng công trình và chuyển dịch của tƣờng vây nhằm kiểm soát sự cố có thể
xảy ra đối với công trình và các công trình lân cận.

14
Chương 2
QUAN TRẮC ĐỘ LÚN NỀN MÓNG VÀ TẦNG HẦM CÔNG TRÌNH
NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG XÂY DỰNG
2.1. YÊU CẦU KỸ THUẬT QUAN TRẮC ĐỘ LÚN TRONG QUÁ TRÌNH
XÂY DỰNG MÓNG VÀ TẦNG HẦM NHÀ CAO TẦNG
2.1.1. Nguyên nhân gây ra độ lún trong quá trình thi công móng và tầng hầm
Trong điều kiện đô thị khi xây dựng ngầm thƣờng gây ra nhiều hệ lụy xấu
chẳng những đối với công trình ở gần nhƣ lún, nứt, thậm chí sụp đổ (hình 2.1) mà
còn làm thay đổi chế độ thủy động của nƣớc dƣới đất.
Hình 2.1. Ảnh hưởng của hố đào đến công trình lân cận [11]
Trên hình 2.1:
1. Nguyên nhân gây chuyển dịch 2. Đất bị đào hoặc chuyển dịch
3. Phân bố chuyển dịch thể tích 4. Chuyển dịch của mặt đất
5. Chuyển dịch của kết cấu và nghiêng lệch 6. Sự hư hỏng của kết cấu
7. Chuyển dịch đất quanh hố đào phía không có công trình hiện hữu.
Từ trên hình 2.1 ta thấy:
Trong quá trình thi công hố đào để thi công móng và tầng hầm, khi lấy đi
một lƣợng đất nào đó sẽ làm thay đổi trạng thái ứng suất nên dẫn tới biến dạng của
khối đất quanh hố đào. Đất sẽ chuyển dịch về phía hố đào, độ lớn của chuyển dịch
phụ thuộc vào chất lƣợng của kết cấu chống giữ, loại đất, khoảng cách cũng nhƣ vị
trí và tải trọng của công trình lân cận. Tổng hợp các loại chuyển dịch này sẽ làm
mặt đất lân cận hố đào lún xuống. Nếu trong vùng ảnh hƣởng này có các công trình
thì chúng sẽ bị biến dạng.

15
2.1.2. Nội dung công tác quan trắc độ lún trong quá trình thi công móng
và tầng hầm
Nội dung công tác quan trắc độ lún trong quá trình thi công móng và tầng hầm
công trình nhà cao tầng chủ yếu bao gồm các công việc sau [35], [36], [37], [82]:
- Quan trắc lún bề mặt đất, quan trắc lún theo chiều sâu của các lớp đất xung
quanh hố đào (lún các tầng đất nền).
- Quan trắc lún các công trình lân cận.
- Quan trắc trồi hố móng (bùng nền đáy hố đào).
- Theo [35] việc đo và xác định độ lún của công trình cần đƣợc tiến hành ngay
từ khi xây xong phần móng. Do vậy, khi thi công xây dựng tầng hầm công trình đã có
tải trọng nên cần quan trắc độ lún của công trình ngay cả trong giai đoạn này.
2.1.3. Xác định vùng quan trắc lún trong quá trình thi công móng và tầng hầm
Trong quá trình thi công hố đào để thi công móng và tầng hầm nhà cao tầng
vấn đề đặt ra là phải xác định đƣợc vùng bị lún (phễu lún) do hố đào gây nên để từ
đó tiến hành quan trắc lún nền và các công trình trong vùng bị lún đó nhằm kiểm
soát sự cố có thể xảy ra đối với các công trình lân cận hố đào. Vùng bị ảnh hƣởng
lún này thƣờng đƣợc đơn vị thiết kế phần móng và tầng hầm đƣa ra.
Trong trƣờng hợp thiết kế không đƣa ra vùng cần quan trắc lún thì chúng ta
có thể tính vùng ảnh hƣởng này theo các công thức ƣớc tính. Hình 2.2 thể hiện biến
dạng của khối đất xung quanh hố đào.
Hình 2.2. Biến dạng của khối đất xung quanh hố đào [80]

16
Chuyển dịch, biến dạng của thân tƣờng chắn và hệ thống chống đỡ, trồi lên
của đất ở đáy hố móng làm cho khối đất ở xung quanh hố móng bị lún, bị biến dạng
nhƣ hình 2.2 có thể tính theo các công thức sau [80]:
1- Phạm vi ảnh hƣởng của đất xung quanh hố đào ƣớc tính theo công thức (2.1):
o
oB = H . tg(45 - / 2 ) (2.1)
Trong đó: Bo - Phạm vi ảnh hƣởng lún của khối đất (m); H - Độ sâu của kết cấu
tƣờng chắn (m); φ - Góc ma sát trong của đất (o), lấy trị bình quân gia quyền theo độ
dày các lớp đất trong phạm vi độ sâu H.
2- Trị số lún lớn nhất ở xung quanh hố móng ƣớc tính theo công thức (2.2):
o
max o oS = V . tg(45 - / 2) / h (2.2)
Trong đó: Smax- trị số lún lớn nhất của khối đất (m); Vo- lƣợng tổn thất của đất sau
tƣờng (m3/m); Vo bao gồm 2 bộ phận là tổn thất của khối đất Sw1 do chuyển dịch và
biến dạng của thân tƣờng và sự trồi lên của đất đáy hố móng Sw2 gây ra. Sw1 có thể lấy
trị số tính toán biến dạng của chống đỡ và thân tƣờng hoặc trị số đo thực tế bằng máy
đo nghiêng của công trình cùng loại. Sw2 là đƣờng trồi lên của đất ở đáy hố móng
(m3/m), lấy theo trị số đo thực tế ở công trình cùng loại hoặc tính theo công thức (2.3):
2
w2 j o oS = B 0,5h 0,4h / 300 (2.3)
Trong đó: Bj- Độ rộng hố móng (m); ho- Độ sâu hố đào (m).
3- Phạm vi ảnh hƣởng lún nghiêm trọng nhất phía sau tƣờng ƣớc tính theo công
thức (2.4):
π
0i 0
hD =
2 tg 45 - /2 (2.4)
Trong đó: Di - Phạm vi lún nghiêm trọng nhất phía sau tƣờng (m); φ - góc ma sát
trong của đất.
4- Độ lún lệch lớn nhất trong phạm vi Di ƣớc tính theo công thức (2.5):
2 o
max o oI = 1.53V tg (45 - / 2) / h (2.5)
Trong đó: Imax - Độ lún lệch lớn nhất trong phạm vi Di.

17
2.1.4. Yêu cầu độ chính xác và chu kỳ quan trắc lún trong quá trình thi công
móng và tầng hầm
2.1.4.1. Yêu cầu độ chính xác quan trắc lún
Yêu cầu độ chính xác quan trắc độ lún đối với bề mặt đất, quan trắc lún theo
chiều sâu của các lớp đất xung quanh hố đào, quan trắc trồi hố móng, quan trắc lún
công trình lân cận và quan trắc lún công trình chính đƣợc xác định bằng một trong
hai cách sau:
Cách 1: Theo độ lún dự báo, yêu cầu độ chính xác quan trắc đƣợc xác định
bằng công thức:
εS
|S|m
2 (2.6)
Trong công thức (2.6): mS - yêu cầu độ chính xác quan trắc lún ở thời điểm ti; S -giá
trị độ lún dự báo giữa 2 chu kỳ quan trắc; - hệ số đặc trƣng cho độ tin cậy của kết
quả quan trắc, phụ thuộc vào xác xuất đƣợc chấp nhận. Đối với công tác quan trắc
biến dạng thƣờng lấy xác xuất P = 0.997, (tƣơng ứng với =3) và khi đó công thức
tính độ chính xác quan trắc độ lún là:
Sm 0.17S (2.7)
Cách 2: Trong thực tế, yêu cầu độ chính xác quan trắc thƣờng đƣợc xác định
dựa vào điều kiện nền móng, đặc điểm kết cấu đối với từng loại công trình cụ thể (các
tiêu chuẩn này do cơ quan quản lý ngành ban hành). Hiện nay vẫn chƣa có một tiêu
chuẩn nào quy định cụ thể về độ chính xác quan trắc độ lún nền móng nhà cao tầng.
Vì vậy, có thể sử dụng các cấp hạng đo lún trong TCVN 9360:2012 “Quy trình kỹ
thuật xác định độ lún công trình dân dụng và công nghiệp bằng phương pháp đo cao
hình học” [35] để quan trắc độ lún nền móng nhà cao tầng. Trong tiêu chuẩn này đã
nêu ở mục phạm vi áp dụng là “các loại công trình khác khi có yêu cầu đo và xác
định độ lún cũng áp dụng tiêu chuẩn này”. Theo tiêu chuẩn này việc đo độ lún công
trình đƣợc chia làm ba cấp: cấp I, cấp II và cấp III. Độ chính xác yêu cầu của từng
cấp đƣợc đặc trƣng bởi sai số trung phƣơng nhận đƣợc từ hai chu kỳ đo.
- Đối với cấp I: ±1.0 mm
- Đối với cấp II: ±2.0 mm
- Đối với cấp III: ±5.0 mm

18
2.1.4.2. Chu kỳ quan trắc lún
Chu kỳ quan trắc lún đối với bề mặt đất, quan trắc lún theo chiều sâu của các
lớp đất xung quanh hố đào, quan trắc lún các công trình lân cận trong quá trình thi
công móng và tầng hầm phụ thuộc vào tốc độ thi công mà xác định. Trong trƣờng
hợp thi công hố đào nhanh có thể gây biến dạng tƣơng đối nhanh, chu kỳ đo có thể là
1 lần/ ngày trong thời gian 1 tuần đầu và thƣa hơn trong thời gian tiếp theo. Khi biến
dạng vƣợt quá tiêu chuẩn cho phép hoặc tỷ lệ các kết quả quan trắc thay đổi quá
nhiều thì phải tăng thêm tần suất quan trắc. Khi xuất hiệu dấu hiệu cảnh báo, phải liên
tục tiến hành quan trắc và giám sát. Chu kỳ quan trắc đầu tiên cần đƣợc thực hiện
trƣớc khi thi công hố đào.
Đối với quan trắc trồi hố móng, trƣớc khi đào móng, sau khi đào xong và
trƣớc khi đổ bê tông móng đều đo một lần.
Chu kỳ quan trắc lún đối với công trình chính trong thời gian thi công tầng
hầm phụ thuộc vào sự tăng tải trọng của công trình (ví dụ: cứ sau khi đổ bê tông sàn 1
tầng hầm đo lún 1 lần).
2.2. QUAN TRẮC ĐỘ LÚN NỀN MÓNG NHÀ CAO TẦNG TRONG GIAI ĐOẠN
THI CÔNG MÓNG VÀ TẦNG HẦM BẰNG PHƢƠNG PHÁP TRẮC ĐỊA
2.2.1. Kết cấu mốc quan trắc lún nền móng và tầng hầm nhà cao tầng
2.2.1.1. Kết cấu mốc quan trắc lún
Trong quan trắc lún nền móng nhà cao tầng, có hai loại mốc chủ yếu là mốc
độ cao cơ sở (mốc chuẩn) và mốc quan trắc (mốc lún).
1. Mốc độ cao cơ sở
Mốc độ cao cơ sở là cơ sở để xác định độ lún công trình. Mốc độ cao cơ sở
cần thỏa mãn các yêu cầu sau:
- Giữ đƣợc độ cao ổn định trong suốt quá trình đo độ lún công trình.
- Cho phép kiểm tra một cách tin cậy độ ổn định của các mốc khác.
- Cho phép dẫn độ cao đến các mốc đo lún một cách thuận lợi.
Trong quan trắc lún nền móng nhà cao tầng, tùy từng điều kiện cụ thể mà sử
dụng mốc có dạng cọc ống, mốc có dạng cọc bê tông cốt thép, mốc có dạng cọc ngắn
hoặc khối bê tông đƣợc chôn vào lớp đất tốt nguyên thổ đầu tiên để làm mốc độ cao
cơ sở. Cấu tạo các loại mốc này đã đƣợc thể hiện chi tiết trong TCVN 9360:2012

19
[35]. Khi lợi dụng các công trình cũ để đặt mốc độ cao cơ sở thì các công trình này
phải hoàn toàn ổn định (không có hiện tƣợng biến dạng do chuyển dịch, lún). Không
đặt mốc độ cao cơ sở tại các công trình có tải trọng động (tải trọng thay đổi).
Tùy theo tính chất, diện tích mặt bằng và tầm quan trọng của công trình, số
lƣợng mốc độ cao cơ sở cần ít nhất là 3 mốc tạo thành lƣới để kiểm tra lẫn nhau.
2. Kết cấu mốc lún
Mốc đo độ lún là mốc đƣợc gắn trực tiếp vào các vị trí đặc trƣng của kết cấu
chịu lực trên nền móng hoặc thân công trình. Mốc đo độ lún đƣợc phân ra các loại sau:
- Mốc gắn tƣờng, cột;
- Mốc nền móng;
- Các mốc chôn sâu dùng để đo độ lún theo các lớp đất.
Cấu tạo một số loại mốc đo độ lún ở trên đã đƣợc trình bày chi tiết trong
TCVN 9360:2012 [35].
2.2.2. Thiết kế hệ thống lưới quan trắc
2.2.2.1. Cấu trúc hệ thống lưới độ cao trong quan trắc lún công trình
Mạng lƣới độ cao trong đo lún công trình có cấu trúc là hệ thống gồm 2 bậc
lƣới: bậc lƣới khống chế độ cao cơ sở và bậc lƣới quan trắc:
Lưới khống chế độ cao cơ sở có tác dụng là cơ sở độ cao để thực hiện đo nối
độ cao đến các điểm quan trắc (mốc lún) trong suốt thời gian theo dõi độ lún. Yêu
cầu đối với lƣới khống chế là: các điểm mốc cơ sở phải ổn định, có độ cao được xác
định với độ chính xác cần thiết. Các mốc độ cao cơ sở đƣợc đo nối liên kết với nhau
tạo thành một mạng lƣới chặt chẽ với độ chính xác cao và đƣợc kiểm tra thƣờng
xuyên trong mỗi chu kỳ quan trắc.
Lưới quan trắc: đƣợc thành lập bằng cách đo nối liên kết các điểm quan trắc
(mốc lún), toàn bộ bậc lƣới này đƣợc đo nối với hệ thống mốc của lƣới độ cao cơ sở.
Khi thiết kế lƣới quan trắc nên tạo thành nhiều vòng khép để bảo đảm độ vững chắc đồ
hình lƣới và có điều kiện kiểm tra sai số khép tuyến trong quá trình đo đạc ở thực địa.
2.2.2.2. Xác định yêu cầu độ chính xác của các bậc lưới
Sai số độ cao tổng hợp các bậc lƣới đƣợc xác định trên cơ sở yêu cầu độ
chính xác quan trắc lún (mS) và đƣợc xác định theo công thức:

20
SHo
mm =
2 (2.8)
Trong đó: mHo - sai số độ cao tổng hợp của các bậc lƣới; mS - độ chính xác yêu cầu
quan trắc lún. Khi đó, sai số của bậc lƣới khống chế độ cao cơ sở (mkc) và bậc lƣới
quan trắc (mqt) đƣợc tính nhƣ sau:
- Đối với lƣới độ cao cơ sở:
0H Skc
2 2
m mm = =
1 + k 2(1 + k ) (2.9)
- Đối với lƣới quan trắc:
oH Sqt
2 2
k.m k.mm = =
1 + k 2(1 + k ) (2.10)
Trong công thức (2.9) và (2.10): k là hệ số suy giảm độ chính xác giữa các bậc lƣới
(thƣờng k = 2 3).
2.2.2.3. Ước tính độ chính xác lưới độ cao trong quan trắc lún công trình
Trƣờng hợp tổng quát, ƣớc tính lƣới đƣợc dựa trên công thức sai số trung
phƣơng của hàm số sau bình sai:
μ μF F
F
1m = . = . Q
P (2.11)
Trong công thức (2.11): là sai số trung phƣơng đơn vị trọng số (đặc trƣng
cho độ chính xác đo chênh cao), còn 1/PF hoặc (QF) là trọng số đảo của hàm số (đặc
trƣng cho đồ hình lƣới) và đƣợc tính theo công thức:
T
FQ = f Qf (2.12)
Ƣớc tính lƣới độ cao đo lún thƣờng đƣợc thực hiện theo phƣơng pháp chặt
chẽ trên cơ sở thuật toán bình sai gián tiếp, thông qua các phần mềm chuyên ngành
trên máy tính.
2.2.3. Quan trắc lún nền đất xung quanh hố móng
Khi quan trắc lún bề mặt, lún các tầng đất nền, các mốc quan trắc phải đƣợc
bố trí xung quanh hố móng và thƣờng đƣợc bố trí theo dạng mặt cắt quan trắc,
khoảng cách giữa các mặt cắt nên từ 30 † 50m. Mỗi một vị trí quan trắc lắp đặt
một mốc quan trắc. Giá trị chuyển dịch thẳng đứng (lún) theo độ sâu là một giá trị

21
quan trọng trong việc theo dõi phần nền móng công trình, đặc biệt trong nền đất
yếu. Mốc đo lún sâu đƣợc đƣa sâu xuống lớp đất cần đánh giá độ lún. Hình 2.3 là
cấu tạo mốc đo lún sâu của các lớp đất. Độ cao của điểm quan trắc lún nền đất
xung quanh hố móng nên đo theo phƣơng pháp đo cao hình học với độ chính xác
theo đo lún cấp III.
Hình 2.3. Mốc đo lún sâu của các lớp đất
Hình 2.4. Lắp đặt mốc quan trắc lún các lớp đất
1. Nắp bảo vệ;
2. Mặt đất;
3. Ống vách;
4. Hố khoan;
5. Vữa sét bentonite;
6. Ống thép ;
7. Nắp đáy;
8. Khoảng cách dự phòng sao
cho khi đo trồi hoặc ống vách bị
lún không chạm vào mũi xoắn;
9. Mũi xoắn;

22
2.2.4. Quan trắc lún các công trình lân cận hố đào
Các công trình lân cận hố đào nằm trong phạm vi ảnh hƣởng lún do hố đào
gây nên cần đƣợc tiến hành quan trắc lún để kiểm soát sự cố có thể xảy ra.
Mốc quan trắc lún các công trình lân cận (nhà dân, công trình bê tông cốt
thép …) đƣợc bố trí trên thân công trình cần quan trắc. Mốc có cấu tạo nhƣ các mốc
đo lún thông thƣờng, vị trí gắn mốc sao cho phản ánh đƣợc một cách đầy đủ nhất về
độ lún của toàn công trình và bảo đảm đƣợc các điều kiện đo đạc. Khi bố trí mốc
quan trắc lún cần tham khảo ý kiến của ngƣời thiết kế. Độ chính xác đo lún các
công trình lân cận (nhà dân, công trình bê tông cốt thép) cần đo lún với độ chính
xác đo lún cấp II. Hình 2.5 ở dƣới là mặt bằng bố trí mốc quan trắc lún bề mặt đất
và các công trình lân cận hố đào của một công trình trên đƣờng Xuân Thủy, Hà Nội.
Hình 2.5. Mặt bằng bố trí mốc đo lún bề mặt đất và đo lún các công trình lân cận

23
2.2.5. Quan trắc trồi hố móng
Khi thi công hố đào, hiện tƣợng trồi đáy do dỡ tải là một hiện tƣợng cần
đƣợc quan trắc, nó có thể tác động đến phần bê tông đáy hố, mà khi bê tông chƣa
đạt cƣờng độ thì có thể gây ra hiện tƣợng nứt bê tông làm ảnh hƣởng đến khả năng
chống thấm. Dựa vào kết quả quan trắc trồi hố móng để từ đó có thể đƣa ra các
giải pháp kỹ thuật đề phòng sự cố có thể xảy ra.
Mốc quan trắc biến dạng trồi hố móng đƣợc bố trí trong diện tích phần đào.
Cấu tạo mốc nhƣ hình 2.3 và đƣợc lắp đặt tới độ sâu dƣới đáy hố đào trƣớc khi thi công
hố đào, các mốc nên bố trí ở chỗ có thể phản ánh đặc trƣng trồi nhƣ tâm điểm của
hố móng, trên trục dọc, trục ngang của hố móng.
Độ cao của điểm quan trắc biến dạng trồi hố móng nên đo theo phƣơng pháp
đo cao hình học với độ chính xác theo đo lún cấp III, trƣớc khi đào móng, sau khi
đào xong và trƣớc khi đổ móng đều đo một lần. Đối với công trình có số tầng hầm
nhiều, hố đào sâu, trong quá trình quan trắc trồi hố móng cần phải sử dụng các thiết
bị phụ trợ để truyền độ cao tới mốc quan trắc thì các thiết bị phụ trợ này phải đƣợc
hiệu chỉnh nhiệt độ, chiều dài và lực kéo.
2.2.6. Quan trắc lún công trình chính trong quá trình thi công tầng hầm
Quan trắc lún công trình chính thực chất là quan trắc lún tƣờng vây (tƣờng
tầng hầm) và các phần bên trong tƣờng vây (cột, vách, vách thang máy, …). Công
tác quan trắc độ lún công trình chính đƣợc thực hiện nhằm mục đích sau:
-
.
- .
-
.
- Xác định các giá trị độ lún (độ lún lệch, tốc độ lún trung bình,...) của công trình.
-
.
Mốc đo lún công trình chính có cấu tạo nhƣ mốc đo lún thông thƣờng và
đƣợc gắn ở những vị trí đặc trƣng cho quá trình lún của công trình, mốc đƣợc phân

24
bố đều khắp trên mặt bằng công trình. Đối với từng loại nhà, số lƣợng mốc và vị trí
đặt mốc quan trắc đã đƣợc nêu chi tiết trong TCVN 9360 :2012 [35]. Tùy thuộc vào
biện pháp thi công tầng hầm mà mốc đo lún có thể đƣợc gắn ở tầng hầm đầu tiên
(thi công topdonw) hoặc tầng hầm cuối cùng (thi công đào mở). Các mốc đo lún cần
lắp đặt ngay sau khi các cột, vách, vách thang máy của tầng hầm đƣợc thi công đầu
tiên đã tháo dỡ cốp pha. Độ chính xác đo lún cho công trình chính cần đo lún với độ
chính xác đo lún cấp II. Cứ sau khi đổ bê tông sàn của 1 tầng hầm thì nên tiến hành
quan trắc lún 1 lần. Công tác quan trắc công trình chính ngoài việc quan trắc lún
trong quá trình thi công tầng hầm còn phải quan trắc cả trong giai đoạn thi công phần
thân, giai đoạn hoàn thiện và giai đoạn đƣa công trình vào khai thác sử dụng. Hình
2.6 là mặt bằng bố trí mốc quan trắc lún cho một công trình tại Quận Ba Đình, Hà
Nội. Các mốc đo lún đƣợc gắn ở tầng hầm 2.
H
Hình 2.6. Mặt bằng bố trí mốc đo lún công trình

25
2.2.7. Xử lý số liệu quan trắc độ lún nền móng nhà cao tầng trong giai đoạn thi
công móng và tầng hầm
2.2.7.1. Phân tích độ ổn định mốc độ cao cơ sở
1. Tiêu chuẩn đánh giá độ ổn định của mốc độ cao cơ sở
Tiêu chuẩn ổn định cho các điểm mốc độ cao cơ sở là: Điểm khống chế độ
cao cơ sở được coi là ổn định nếu chênh lệch độ cao của điểm ở chu kỳ đang xét so
với chu kỳ đầu không vượt quá sai số giới hạn xác định độ chênh lệch đó [17].
Tiêu chuẩn nêu trên đƣợc cụ thể hóa bằng biểu thức:
ii SS t.m (2.13)
Trong đó: Si và mSi là giá trị chênh lệch và sai số tƣơng ứng; t - là hệ số xác định
tiêu chuẩn sai số giới hạn, thông thƣờng t lấy giá trị trong khoảng từ 2 đến 3.
Sau bình sai lƣới khống chế độ cao cơ sở, giá trị tính đƣợc theo công thức
(2.13) thƣờng không giống nhau đối với các điểm trong lƣới. Vì vậy, có thể dựa vào
sai số trung phƣơng cần thiết để xác định độ lún đối với các điểm độ cao cơ sở
(csSm ) để xác định tiêu chuẩn thống nhất chung cho toàn bộ các điểm của mạng lƣới,
khi đó tiêu chuẩn (2.13) sẽ đƣợc viết lại là:
csi S| S | t.m (2.14)
Dựa trên yêu cầu độ chính xác xác định độ lún thì:
Si
2
m| S | t.
1 k (2.15)
Trong công thức (2.15): Si - độ lún của điểm độ cao cơ sở ở chu kỳ đang xét
so với chu kỳ đầu; mS - yêu cầu độ chính xác xác định độ lún; t: là hệ số xác định
tiêu chuẩn sai số giới hạn (t = 2÷3); k - hệ số suy giảm độ chính xác giữa các bậc
lƣới (k = 2÷3).
2. Các phương pháp phân tích đánh giá độ ổn định mốc độ cao cơ sở
Các phƣơng pháp đánh giá ổn định mốc độ cao cơ sở có thể đƣợc chia theo 2
nhóm chủ yếu là:
1- Phƣơng pháp phân tích thống kê: dựa trên cơ sở kiểm định các giả thiết
thống kê để xác định mức độ tƣơng quan giữa các chênh cao trong lƣới, trên cơ sở

26
đó đánh giá độ ổn định của các mốc.
2- Phƣơng pháp giả định về sự ổn định của một nhóm mốc trong lƣới: một số
phƣơng pháp thuộc loại này là phƣơng pháp Trernhicov, phƣơng pháp Costakhel,
phƣơng pháp bình sai tự do,...
Cũng cần phải khẳng định rằng, bài toán phân tích, đánh giá độ ổn định của
hệ thống điểm mốc cơ sở dựa trên cơ sở các trị đo lặp trong nội tại mạng lƣới là bài
toán tƣơng đối. Lời giải cho bài toán đã nêu chỉ có thể đƣợc xác định nếu có một số
điều kiện bổ sung nào đó. Hiện nay, thuật toán bình sai lƣới tự do thƣờng đƣợc sử
dụng để phân tích độ ổn định mốc độ cao cơ sở trong quan trắc lún công trình.
2.2.7.2. Tính toán bình sai lưới độ cao quan trắc lún
Để bảo đảm tính chặt chẽ của kết quả, lƣới độ cao trong quan trắc lún nền
móng nhà cao tầng cần phải đƣợc bình sai chặt chẽ theo nguyên lý số bình phƣơng
nhỏ nhất. Hiện nay, hầu hết các phần mềm bình sai lƣới trắc địa đều có thuật toán
dựa trên cơ sở phƣơng pháp bình sai gián tiếp. Độ cao gốc của mạng lƣới quan trắc
là độ cao của các điểm độ cao cơ sở ổn định.
2.2.7.3. Tính toán tham số độ lún công trình
1. Độ lún của điểm quan trắc
- So sánh giữa 2 chu kỳ (chu kỳ j so với chu kỳ i)
j,i j iS = H - H (2.16)
- So với chu kỳ đầu (chu kỳ 1)
j,1 j 1S = H - H (2.17)
Các thông số lún nhƣ: Vận tốc lún, độ lún trung bình của công trình, độ lún
lệch, độ nghiêng nền móng công trình, độ cong tƣơng đối và tuyệt đối nền móng
công trình đƣợc tính toán theo các công thức nêu trong TCVN 9360:2012 [35].
2. Thể hiện đồ họa độ lún công trình
Độ lún công trình có thể đƣợc biểu diễn bằng phƣơng pháp đồ họa, cách thể
hiện này cho phép cảm nhận độ lún công trình một cách trực quan. Thông thƣờng
kết hợp phân tích đồ họa với phân tích số sẽ cho phép phân tích, đánh giá độ lún
một cách chuẩn xác hơn. Có nhiều hình thức thể hiện đồ họa độ lún công trình,

27
trong đó 3 cách thể hiện thƣờng gặp nhất là: biểu đồ lún theo thời gian, mặt cắt lún
và bình đồ lún.
2.2.8. Nhận xét về quan trắc độ lún nền móng nhà cao tầng bằng phương pháp
trắc địa
Phƣơng pháp trắc địa quan trắc độ lún nền móng nhà cao tầng có ƣu điểm
là độ chính xác cao, độ lún của các mốc quan trắc đƣợc tính toán từ các mốc độ
cao cơ sở ổn định nên cho giá trị độ lún tuyệt đối. Nhƣợc điểm của phƣơng pháp
là để quan trắc lún các lớp đất theo chiều sâu (quan trắc lún các tầng đất nền) đòi
hỏi phải thi công các mốc quan trắc riêng biệt cho nên công lắp đặt lớn, do mỗi
độ sâu phải thực hiện trong một hố khoan. Để khắc phục nhƣợc điểm này có thể
sử dụng cảm biến để quan trắc lún theo chiều sâu. Nội dung quan trắc lún bằng
cảm biến đƣợc trình bày ở mục 2.3.
2.3. QUAN TRẮC ĐỘ LÚN NỀN MÓNG NHÀ CAO TẦNG TRONG GIAI ĐOẠN
THI CÔNG XÂY DỰNG BẰNG CẢM BIẾN
2.3.1. Cấu tạo hệ thống đĩa từ
Cảm biến thuận tiện dùng để quan trắc lún theo chiều sâu, một trong những
loại thiết bị hay đƣợc sử dụng để quan trắc độ lún theo chiều sâu hiện nay là đĩa từ.
Đĩa từ là loại thiết bị chuyên dùng để quan trắc lún theo lớp. Hệ thống thiết bị đĩa từ
bao gồm: Ống dẫn hƣớng, nam châm chuẩn, nam châm nhện, nam châm đĩa, dây đo
và đầu dò từ. Hình 2.7 và 2.8 là các bộ phận của đĩa từ, hình 2.9 thể hiện quan trắc
độ lún bằng đĩa từ.
Hình 2.7. Ống dẫn hướng
và nam châm nhện
Hình 2.8. Dây đo, nam châm nhện
và nam châm đĩa

28
Hình 2.9. Quan trắc lún bằng đĩa từ [17]
2.3.2. Phương pháp lắp đặt
Ống dẫn hƣớng có chân nhện từ đƣợc lắp trong hố khoan, bố trí theo thứ tự
trong hình 2.9. Phần nam châm nhện đƣợc lắp trong phần nền đất nguyên thổ, nam
châm đĩa đƣợc lắp đặt trong phần đất đắp cần quan trắc và tại các độ sâu dự kiến. Kích
thƣớc hố khoan phụ thuộc vào kích thƣớc của ống dẫn và chân của nam châm nhện.
Thông thƣờng phần trên cùng là đất đắp thi công có đầm chặt, một nam
châm đĩa đƣợc bố trí ngay bề mặt đất trƣớc khi thi công các lớp đất bên trên. Để
tránh khi đầm lớp đất bên trên tác dụng vào ống dẫn hƣớng làm thay đổi cƣỡng bức
ống dẫn hƣớng, phần trên ngƣời ta có thể sử dụng đoạn ống cho phép chuyển dịch
mà không tác động đến phần dƣới ống.
Sau khi hạ xong, dùng vữa sét bentonite để chèn phần xung quanh ống.
Do ống dẫn hƣớng đƣợc sử dụng để đƣa đầu đo đến đáy ống vì vậy ống cần
có nắp đậy để đảm bảo không có dị vật rơi vào.
Trong trƣờng hợp dùng để quan trắc độ trồi đáy hố móng, ống mốc đƣợc
lắp đặt trƣớc khi thi công hố đào, các mốc đo đƣợc lắp đặt ở các vị trí dƣới đáy
. . . . . . .
.
. . . . . . .
. . . . .
. . . . . .
. . . . . .
. . . . . . .
. . . . .
. . . . . .
. . . . . .
. . . . . . .
. . . . .
. . . . . .
. . . . . .
. . . . . . .
. . . . .
. . . . . .
. . . . . .
Đá gốc
L0
LP
A
P1
O
Pn
Pi Đất đắp
Nam châm đĩa
Nam châm nhện
Nam châm chuẩn
Đầu dò
Dây đo

29
hố đào. Trong quá trình đào phần ống bên trên đƣợc cắt bỏ. Hình 2.10 thể hiện
lắp đặt mốc đo trồi đáy hố móng bằng phƣơng pháp đĩa từ trong trƣờng hợp tầng
hầm thi công từ trên xuống.
Hình 2.10. Lắp đặt mốc đo trồi đáy hố đào
Trên hình 2.10: hình 2.10a là lắp đặt mốc trƣớc khi thi công hố đào, trong
quá trình đào phần ống bên trên đƣợc cắt bỏ (hình 2.10b và 2.10c).
2.3.3. Nguyên lý đo độ lún bằng đĩa từ
Trong phƣơng pháp đĩa từ để đơn giản quá trình đo, ngƣời ta thƣờng yêu cầu đáy
ống dẫn hƣớng phải đƣợc hạ xuống tầng đá gốc hoặc xuống lớp đất đá mà tại độ sâu ấy
đáy ống dẫn hƣớng không bị lún. Tại đáy ống có một mốc từ (nam châm chuẩn - hình
2.9) gắn liền với ống dẫn hƣớng có vai trò là mốc chuẩn trong quá trình quan trắc.
Để xác định độ cao của một vị trí trong một lần đo, nếu số đọc trên thƣớc khi
đo các điểm O và P tƣơng ứng là LO, LP, thì độ cao điểm P (hình 2.9) đƣợc tính theo
công thức sau:
P O O PH = H + L - L (2.18)
Trong đó: HP: Độ cao điểm P; Ho: Độ cao mốc đáy (độ cao mốc chuẩn); Lo:
Khoảng cách giữa đỉnh ống và mốc đáy; LP: Khoảng cách từ đỉnh ống đến điểm
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . .
. . . . . . . .
. . . . . . . . . .
. . . . . . . . .
. . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
.. . . . . . . .
. ……….
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
(a) (b) (c)
Sàn cốt 0.0
Sàn tầng hầm 1
Sàn tầng hầm 2

30
quan trắc P.
Giá trị độ lún của điểm quan trắc đƣợc xác định bằng cách so sánh độ cao
của điểm đó ở 2 chu kỳ đo khác nhau nhƣ đối với cách tính trong phƣơng pháp trắc
địa thông thƣờng.
2.3.4. Độ chính xác đo lún bằng phương pháp đĩa từ
Có 3 nguồn sai số chủ yếu ảnh hƣởng đến độ chính xác của phƣơng pháp
quan trắc đĩa từ là:
1- Sai số đọc số, sai số do độ nhạy của thiết bị dò tìm (đƣa điểm đo trên đầu dò
vào mặt phẳng đĩa từ) và sai số do biến động chiều dài thƣớc đo. Với thƣớc khắc vạch
đến mm thì giá trị của sai số đọc số sẽ không vƣợt quá 0.5mm.
2- Sai số do thiết bị đo phụ thuộc độ chính xác chế tạo máy, ảnh hƣởng của
nguồn sai số này sẽ đƣợc giảm đáng kể nếu tại mỗi điểm quan trắc trị đo trung bình
đƣợc xác định từ nhiều lần đọc số (thực tế quan trắc tại một số công trình các số đọc
tại cùng điểm đo có độ chênh lệch không quá 1 2mm).
3- Sai số thƣớc đo phát sinh do sự thay đổi chiều dài thƣớc theo nhiệt độ
trong ống dẫn hƣớng.
Theo tài liệu [14] thì sai số trung phƣơng độ lún xác định theo công nghệ đĩa
từ đạt cỡ (5 8) mm.
2.3.5. Ví dụ đo lún nền công trình bằng đĩa từ
Để minh chứng cụ thể về ứng dụng phƣơng pháp đĩa từ quan trắc lún các lớp
đất theo chiều sâu. Trong phần này trình bày kết quả quan trắc lún nền đất theo
chiều sâu tại 1 vị trí quan trắc có lắp đặt 3 bàn đo lún ở 3 vị trí độ sâu với 3 chu kỳ
quan trắc. Quá trình đo đạc và tính toán lấy điểm ở đáy ống làm mốc chuẩn với độ
cao giả định của điểm này là O
H 0.000m . Kết quả đo và tính toán độ lún ở các
bàn đo lún đƣợc trình bày ở các bảng 2.1 đến 2.3 và hình 2.11 là biểu đồ thể hiện độ
lún tại các bàn đo lún.

31
Bảng 2.1. Kết quả quan trắc lún tại bàn 1
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 1
đến đỉnh ống
(m)
Chiều dài
từ mốc chuẩn
đến đỉnh ống
(m)
Khoảng cách
từ bàn lún 1
đến mốc chuẩn
(m)
Độ cao
bàn lún
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5=HO+4) (6)
01/05/2012 15.226 20.126 4.900 4.900 0
08/05/2012 15.240 20.126 4.886 4.886 -14
15/05/2012 15.246 20.126 4.880 4.880 -20
Bảng 2.2. Kết quả quan trắc lún tại bàn 2
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 2
đến đỉnh ống
(m)
Chiều dài
từ mốc chuẩn
đến đỉnh ống
(m)
Khoảng cách
từ bàn lún 2
đến mốc chuẩn
(m)
Độ cao
bàn lún
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5=HO+4) (6)
01/05/2012 10.111 20.126 10.015 10.015 0
08/05/2012 10.130 20.126 9.996 9.996 -19
15/05/2012 10.140 20.126 9.986 9.986 -29
Bảng 2.3. Kết quả quan trắc lún tại bàn 3
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 3
đến đỉnh ống
(m)
Chiều dài
từ mốc chuẩn
đến đỉnh ống
(m)
Khoảng cách từ
bàn lún 3 đến
mốc chuẩn
(m)
Độ cao
bàn lún
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5=HO+4) (6)
01/05/2012 7.012 20.126 13.114 13.114 0
08/05/2012 7.042 20.126 13.084 13.084 -30
15/05/2012 7.066 20.126 13.060 13.060 -54

32
Hình 2.11. Biểu đồ kết quả quan trắc lún bằng đĩa từ
2.3.6. Nhận xét quan trắc độ lún nền móng nhà cao tầng bằng cảm biến
Phƣơng pháp sử dụng cảm biến (đĩa từ) có ƣu điểm là tại một lỗ khoan có
thể bố trí nhiều mốc quan trắc cho nhiều độ sâu khác nhau, cách thức đo đạc và
tính toán độ lún đơn giản. Nhƣợc điểm của phƣơng pháp là các trị đo của phƣơng
pháp này đƣợc so sánh với điểm tham chiếu là đáy ống dẫn hƣớng. Vì vậy, đòi hỏi
đáy ống dẫn hƣớng cần đƣợc neo vào lớp đất đá ổn định nằm ở dƣới sâu (không bị
lún). Trong trƣờng hợp lớp đất đá này nằm ở quá sâu thì khó lắp đặt và không hợp
lý về kinh tế để khoan sâu. Mặt khác, trong mỗi chu kỳ quan trắc không thể đánh
giá đƣợc độ ổn định của điểm tham chiếu cho nên dẫn tới tình trạng nếu điểm
tham chiếu bị lún thì giá trị độ lún thu đƣợc tại các bàn đo lún sẽ không phản ánh
chính xác độ lún của các lớp đất đƣợc quan trắc. Do vậy, trong trƣờng hợp này cần
chọn điểm tham chiếu khác ổn định hoặc có khả năng xác định đƣợc độ lún trực
tiếp bằng phƣơng pháp trắc địa.
2.4. GIẢI PHÁP KẾT HỢP PHƢƠNG PHÁP TRẮC ĐỊA VÀ PHƢƠNG
PHÁP SỬ DỤNG CẢM BIẾN QUAN TRẮC ĐỘ LÚN NỀN MÓNG
NHÀ CAO TẦNG
Nhƣ đã trình bày ở trên, phƣơng pháp trắc địa và phƣơng pháp sử dụng cảm
biến (đĩa từ) để quan trắc lún các lớp đất theo chiều sâu (hoặc đo trồi nền móng công
trình) đều có ƣu điểm và nhƣợc điểm riêng. Để khắc phục nhƣợc điểm của hai

33
phƣơng pháp này, trong luận án chúng tôi đề xuấ
:
-
.
-
đo lún theo chiều sâu.
Quá trình kết hợp phƣơng pháp trắc địa và phƣơng pháp đĩa từ để quan trắc
độ lún nền móng nhà cao tầng đƣợc thực hiện nhƣ sau:
2.4.1. Trường hợp đáy ống dẫn hướng được neo vào lớp đất đá ổn định
Trong quan trắc lún bằng đĩa từ, khi đáy ống dẫn hƣớng đƣợc lắp đặt ngậm
vào tầng đá gốc (hoặc lớp cuội sỏi) thì đáy ống có thể đƣợc coi là ổn định. Trong
trƣờng hợp này giải pháp kết hợp phƣơng pháp trắc địa và đĩa từ nhằm nâng cao
độ chính xác đo lún của các bàn đo lún nằm sâu ở các lớp đất đƣợc quan trắc lún.
Trong mỗi chu kỳ quan trắc ngoài việc đo đạc độ lún bằng đĩa từ thì cần xác định
thêm độ cao điểm A (là điểm ở đỉnh ống- hình 2.9) trong hệ thống mốc độ cao cơ
sở ổn định bằng phƣơng pháp trắc địa (trong phƣơng pháp trắc địa sử dụng
phƣơng pháp thuỷ chuẩn hình học để xác định độ cao). Nhƣ vậy, đỉnh ống dẫn
hƣớng sẽ có 2 đại lƣợng độ lún, độ lún đo bằng trắc địa (STĐ) và độ lún đo bằng
đĩa từ (SĐT). Có thể thấy rằng đo độ lún của điểm đỉnh ống đo bằng phƣơng pháp
trắc địa có độ chính xác rất cao nên có thể coi đây là giá trị thực của độ lún và giá
trị chênh lệch giữa hai phƣơng pháp đƣợc coi là sai số khép đo độ lún bằng đĩa từ
( ), đƣợc tính theo công thức sau:
Δ§T T§
= S - S (2.19)
Trong công thức (2.19): SĐT - độ lún điểm đỉnh ống (điểm A) đo bằng đĩa từ (đây
chính là giá trị chênh lệch khoảng cách từ nam châm chuẩn đến điểm đỉnh ống ở
các chu kỳ đo); STĐ - độ lún điểm đỉnh ống đo bằng trắc địa.

34
Với cách thức đo đạc và tính toán độ lún trong phƣơng pháp đĩa từ có thể
thấy rằng các điểm ở xa điểm mốc chuẩn (đáy ống) thì có độ chính xác thấp hơn
điểm quan trắc ở gần mốc chuẩn. Do vậy, trong trƣờng hợp này bằng cách phân
phối sai số khép ( ) cho các điểm đo nằm ở dƣới sâu theo nguyên tắc tỷ lệ thuận
với khoảng cách từ đáy ống đến điểm đo theo công thức (2.20) ở dƣới sẽ xác định
đƣợc các giá trị độ lún tại các bàn đo lún với độ chính xác đƣợc nâng cao.
Δi
i i
OP§T
P P
OA
.LS = S -
L (2.20)
Trong công thức (2.20): i
§T
PS : độ lún của điểm Pi đo bằng đĩa từ;
iOPL : khoảng cách
từ điểm đáy ống đến điểm quan trắc Pi; OAL : khoảng cách từ điểm đáy ống đến
điểm đỉnh ống.
2.4.2. Trường hợp đáy ống dẫn hướng được neo vào lớp đất đá không ổn định
Đáy ống dẫn hƣớng của phƣơng pháp đĩa từ đƣợc coi là không ổn định khi đáy
ống không đƣợc lắp đặt ngậm vào tầng đá gốc (hoặc lớp cuội sỏi).
của điểm tham chiếu và giá trị độ lún chính xác của các điểm đo lún theo chiều sâu.
Đối với trƣờng hợp này giá trị ( ) tính đƣợc theo công thức (2.19) có thể coi là độ
lún của điểm tham chiếu ở đáy ống, khi đó ta tiến hành hiệu chỉnh giá trị ( ) cho
các điểm đo nằm ở dƣới sâu theo công thức sau:
Δi i
§T
P PS = S - (2.21)
Cũng trong trƣờng hợp này, chúng ta có thể sử dụng điểm đỉnh ống để làm
điểm tham chiếu, tuy rằng điểm này không ổn định nhƣng lại xác định đƣợc trực
tiếp bằng phƣơng pháp trắc địa. Quá trình tính toán đƣợc thực hiện nhƣ sau:
Trong mỗi chu kỳ quan trắc dựa vào độ cao thủy chuẩn của điểm A (HA) tiến
hành tính toán độ cao của điểm P theo công thức sau (hình 2.12):
- Độ cao điểm P ở thời điểm đo chu kỳ 1:
P A P
(1) (1) (1)H = H - L (2.22)
- Độ cao điểm P ở thời điểm đo chu kỳ i:

35
P A P
(i) (i) (i)H = H - L (2.23)
- Độ lún của điểm P ở thời điểm đo chu kỳ i so với chu kỳ 1:
P P
(i) (1)S = H - H (2.24)
Trong công thức (2.22) và (2.23): P
(1)H ,
P
(i)H - độ cao điểm P ở chu kỳ 1 và chu kỳ i;
A
(1)H , (i)
AH - độ cao điểm A ở chu kỳ 1 và chu kỳ i;
P
(1)L ,
P
( i)L - khoảng cách từ điểm
A đến điểm P ở chu kỳ 1 và chu kỳ i.
Dựa vào hình 2.12 ở dƣới và các công thức tính toán (2.22) đến (2.24), dễ dàng
nhận thấy rằng trong giải pháp kết hợp này không cần sử dụng đến điểm tham chiếu ở
đáy ống do đó trong quá trình quan trắc ống dẫn hƣớng không cần neo vào lớp đất đá ổn
định mà chỉ cần lắp đặt ống dẫn hƣớng đến độ sâu của lớp đất cần quan trắc lún.
Hình 2.12. Quan trắc lún bằng thủy chuẩn hình học kết hợp đĩa từ
2.4.3. Ví dụ đo lún nền công trình bằng phương pháp trắc địa kết hợp đĩa từ
2.4.3.1. Ví dụ trong trường hợp đáy ống dẫn hướng neo vào lớp đất đá ổn định
Quay trở lại với ví dụ trong phƣơng pháp đĩa từ ở trên (mục 2.3.5), trong các chu
kỳ quan trắc ngoài việc đo đạc bằng phƣơng pháp đĩa từ, tiến hành xác định độ cao điểm
đỉnh ống (điểm A) bằng thủy chuẩn hình học từ mốc độ cao cơ sở đến (mốc độ cao cơ sở
ổn định). Kết quả xác định độ cao trong 2 chu kỳ đƣợc đƣa ra trong bảng 2.4.
Mia thủy chuẩn Máy thủy chuẩn
MC
(Mốc độ cao
cơ sở)
. . . . . .
. .
. . . . . .
. . . . .
. . . . .
. . . . . .
. . . . .
. . . . .
. . . . . .
. . . . .
. . . . .
. . . . . .
. . . . .
. . . . .
. . . . . .
. . . . .
. . . . .
. . . . . .
. . . . .
Đầu dò
Nam châm đĩa
Đất đắp
LP
A
P1
Pn
Pi
Dây đo
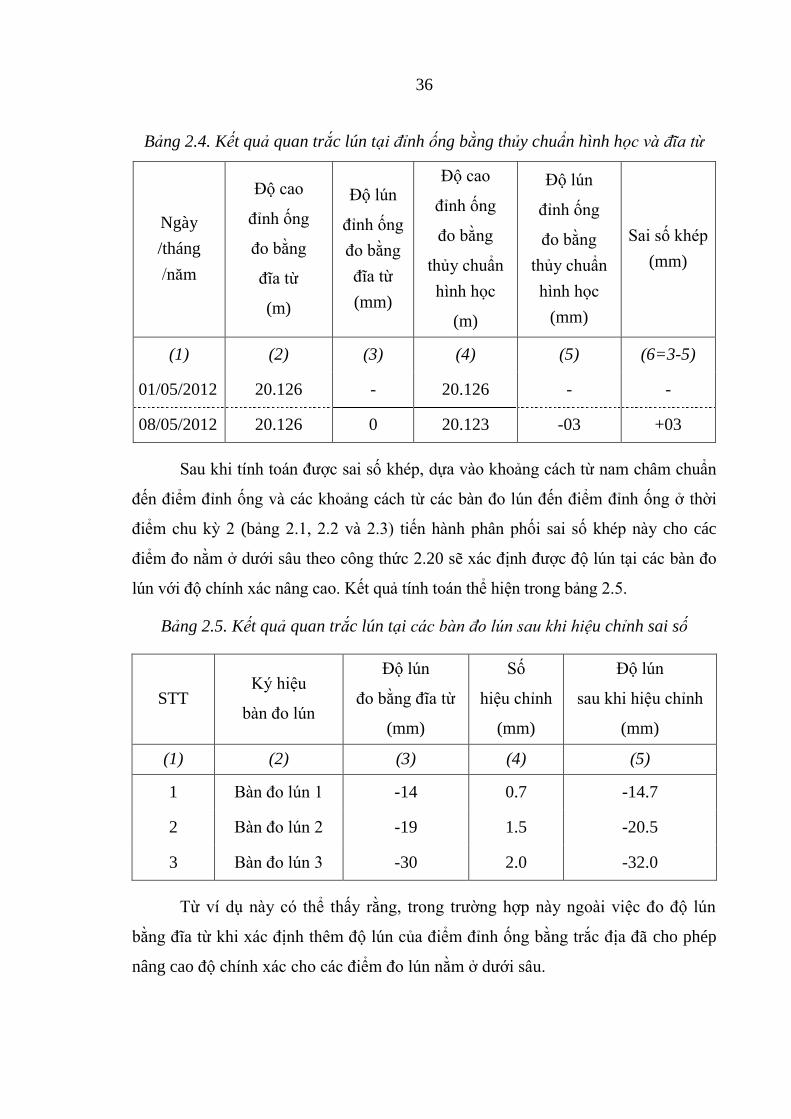
36
Bảng 2.4. Kết quả quan trắc lún tại đỉnh ống bằng thủy chuẩn hình học và đĩa từ
Ngày
/tháng
/năm
Độ cao
đỉnh ống
đo bằng
đĩa từ
(m)
Độ lún
đỉnh ống
đo bằng
đĩa từ
(mm)
Độ cao
đỉnh ống
đo bằng
thủy chuẩn
hình học
(m)
Độ lún
đỉnh ống
đo bằng
thủy chuẩn
hình học
(mm)
Sai số khép
(mm)
(1) (2) (3) (4) (5) (6=3-5)
01/05/2012 20.126 - 20.126 - -
08/05/2012 20.126 0 20.123 -03 +03
Sau khi tính toán đƣợc sai số khép, dựa vào khoảng cách từ nam châm chuẩn
đến điểm đỉnh ống và các khoảng cách từ các bàn đo lún đến điểm đỉnh ống ở thời
điểm chu kỳ 2 (bảng 2.1, 2.2 và 2.3) tiến hành phân phối sai số khép này cho các
điểm đo nằm ở dƣới sâu theo công thức 2.20 sẽ xác định đƣợc độ lún tại các bàn đo
lún với độ chính xác nâng cao. Kết quả tính toán thể hiện trong bảng 2.5.
Bảng 2.5. Kết quả quan trắc lún tại các bàn đo lún sau khi hiệu chỉnh sai số
STT Ký hiệu
bàn đo lún
Độ lún
đo bằng đĩa từ
(mm)
Số
hiệu chỉnh
(mm)
Độ lún
sau khi hiệu chỉnh
(mm)
(1) (2) (3) (4) (5)
1 Bàn đo lún 1 -14 0.7 -14.7
2 Bàn đo lún 2 -19 1.5 -20.5
3 Bàn đo lún 3 -30 2.0 -32.0
Từ ví dụ này có thể thấy rằng, trong trƣờng hợp này ngoài việc đo độ lún
bằng đĩa từ khi xác định thêm độ lún của điểm đỉnh ống bằng trắc địa đã cho phép
nâng cao độ chính xác cho các điểm đo lún nằm ở dƣới sâu.

37
2.4.3.2. Ví dụ trong trường hợp đáy ống dẫn hướng không neo vào lớp đất đá ổn định
Giả sử tiến hành quan trắc lún tại 1 vị trí quan trắc có gắn 3 bàn đo lún ở 3
vị trí độ sâu, đáy ống dẫn hƣớng không neo vào lớp đất đá ổn định và đáy ống
cũng không lắp đặt mốc tham chiếu. Khi đó trong mỗi chu kỳ quan trắc sử dụng
điểm A (điểm đỉnh ống) làm chuẩn. Điểm A là điểm không ổn định nhƣng lại
đƣợc xác định trong hệ thống mốc độ cao cơ sở ổn định bằng phƣơng pháp thủy
chuẩn hình học. Kết quả quan trắc độ lún trong 2 chu kỳ đƣợc đƣa ra trong bảng
2.6 đến bảng 2.8.
Bảng 2.6. Kết quả quan trắc lún tại bàn 1 bằng thủy chuẩn hình học kết hợp đĩa từ
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 1
đến đỉnh ống
(m)
Độ cao
đỉnh ống đo bằng
thủy chuẩn hình học
(m)
Độ cao
bàn lún 1
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5)
15/09/2012 9.152 10.528 1.376 0
15/10/2012 9.158 10.512 1.354 -22
Bảng 2.7. Kết quả quan trắc lún tại bàn 2 bằng thủy chuẩn hình học kết hợp đĩa từ
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 2
đến đỉnh ống
(m)
Độ cao
đỉnh ống đo bằng
thủy chuẩn hình học
(m)
Độ cao
bàn lún 2
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5)
15/09/2012 5.006 10.528 5.522 0
15/10/2012 5.019 10.512 5.493 -29

38
Bảng 2.8. Kết quả quan trắc lún tại bàn 3 bằng thủy chuẩn hình học kết hợp đĩa từ
Ngày
/tháng
/năm
Chiều dài
từ bàn lún 3
đến đỉnh ống
(m)
Độ cao
đỉnh ống đo bằng
thủy chuẩn hình học
(m)
Độ cao
bàn lún 3
(m)
Độ lún
(mm)
(1) (2) (3) (4=3-2) (5)
15/09/2012 1.568 10.528 8.960 0
15/10/2012 1.591 10.512 8.921 -39
Từ ví dụ này có thể thấy rằng, trong trƣờng hợp này đáy ống dẫn hƣớng của
phƣơng pháp đĩa từ không cần neo vào lớp đất đá ổn định. Giải pháp kết hợp cho
phép lấy điểm đỉnh ống làm điểm tham chiếu để xác định độ lún cho các điểm đo
nằm ở dƣới sâu. Trong mỗi chu kỳ quan trắc chuyển dịch của điểm tham chiếu đƣợc
xác định chính xác bằng phƣơng pháp trắc địa.
2.4.4. Nhận xét quan trắc độ lún nền móng nhà cao tầng bằng phương pháp
trắc địa kết hợp với phương pháp sử dụng cảm biến
Từ lý thuyết và ví dụ tính toán nêu trên, có thể nhận thấy rằng: giải pháp kết
hợp phƣơng pháp trắc địa và phƣơng pháp sử dụng cảm biến (đĩa từ) để quan trắc
độ lún nền móng nhà cao tầng có ý nghĩa nhƣ sau:
- Nâng cao độ chính xác đo độ lún tại các bàn quan trắc lún (trong trƣờng
hợp đáy ống dẫn hƣớng đƣợc neo vào lớp đất đá ổn định).
- Giải pháp kết hợp cho phép chúng ta lấy điểm đỉnh ống làm chuẩn để xác
định độ lún tại các bàn quan trắc lún. Nhƣ vậy, trong trƣờng hợp này thì ống dẫn
hƣớng không cần neo vào nền đất đá ổn định mà chỉ cần lắp đặt ống dẫn hƣớng đến
độ sâu của lớp đất cần quan trắc lún, do đó sẽ thuận lợi cho việc thi công lắp đặt ống
dẫn hƣớng, cho phép nâng cao hiệu quả công tác quan trắc lún nền móng công trình
nhà cao tầng.

39
Chương 3
QUAN TRẮC CHUYỂN DỊCH NGANG TƯỜNG VÂY NHÀ CAO TẦNG
TRONG GIAI ĐOẠN THI CÔNG MÓNG VÀ TẦNG HẦM
3.1. YÊU CẦU KỸ THUẬT QUAN TRẮC CHUYỂN DỊCH NGANG
TƢỜNG VÂY NHÀ CAO TẦNG
3.1.1. Một số khái niệm chung về thi công móng và tầng hầm nhà cao tầng
3.1.1.1. Các biện pháp thi công tầng hầm nhà cao tầng
Quá trình thi công tầng hầm nhà cao tầng hiện nay thƣờng sử dụng các
phƣơng pháp sau: Phƣơng pháp Top-down, phƣơng pháp bán Top-down và phƣơng
pháp đào mở. Hình 3.1, 3.2 và 3.3 thể hiện các biện pháp thi công tầng hầm.
Hình 3.1. Biện pháp
thi công Top-down
Hình 3.2. Biện pháp
thi công bán Top-down
Hình 3.3. Biện pháp
thi công đào mở
3.1.1.2. Các biện pháp chắn đất để thi công hố đào trong quá trình thi công móng
và tầng hầm
Khi thi công tầng hầm cho các công trình nhà cao tầng, một vấn đề phức tạp
đặt ra là giải pháp thi công hố đào sâu trong khu đất chật hẹp liên quan đến các yếu
tố kỹ thuật và môi trƣờng. Thi công hố đào sâu làm thay đổi trạng thái ứng suất dẫn
tới biến dạng trong đất nền xung quanh khu vực hố đào và có thể làm thay đổi mực
nƣớc ngầm dẫn đến nền đất bị chuyển dịch và có thể lún gây hƣ hỏng công trình lân
cận nếu không có giải pháp thích hợp chống đỡ thành hố đào.
Hiện nay, các giải pháp chống đỡ thành hố đào thƣờng đƣợc áp dụng là: tƣờng
barrette - tƣờng trong đất (tƣờng vây), tƣờng cừ thép, tƣờng chắn đất bằng cọc khoan
nhồi, tƣờng chắn đất bằng cọc xi măng đất, tƣờng chắn đất bằng ván + sƣờn thép hình.

40
Hình 3.4 đến hình 3.8 thể hiện các giải pháp chống đỡ thành hố đào trong quá
trình thi công tầng hầm nhà cao tầng.
Hình 3.4. Tường chắn đất
bằng bê tông cốt thép (tường
Barrette) - Tường vây
Hình 3.5. Tường chắn
đất bằng cừ thép
Hình 3.6. Tường chắn đất
bằng cọc khoan nhồi
Hình 3.7. Tường chắn đất bằng cọc
xi măng đất
Hình 3.8. Tường chắn đất bằng ván
+ sườn thép hình
Hiện nay đối với các nhà cao tầng có tầng hầm đƣợc xây chen trong khu dân
cƣ thì tƣờng vây là giải pháp thích hợp để chống đỡ thành hố đào.
3.1.1.3. Tường vây nhà cao tầng
Tƣờng vây (tƣờng trong đất) là tƣờng bê tông cốt thép đổ tại chỗ có độ rộng
0.5m đến 1.5m, chiều sâu của tƣờng vây phụ thuộc vào điều kiện địa chất khu vực
xây dựng công trình, chiều sâu của tầng hầm, biện pháp thi công tầng hầm và móng
công trình. Chiều sâu tƣờng vây thƣờng từ 12m đến 30m [23]. Tƣờng vây ngoài
nhiệm vụ chống giữ thành hố đào còn đƣợc sử dụng để làm tường tầng hầm nhà
cao tầng. Do vậy, việc quan trắc chuyển dịch tƣờng vây nhằm phòng ngừa sự cố có
thể xảy ra đối với công trình và công trình lân cận trong quá trình thi công móng và

41
tầng hầm là việc làm hết sức cần thiết. Hình 3.9 thể hiện giải pháp chống đỡ thành
hố đào trong quá trình thi công tầng hầm nhà cao tầng bằng tƣờng vây. Hình 3.10
thể hiện quá trình thi công tƣờng vây nhà cao tầng.
Hình 3.9. Tường vây (tường barrette)
chống đỡ thành hố đào
Hình 3.10. Thi công tường vây
Tƣờng vây đƣợc giữ ổn định trong quá trình thi công bằng các giải pháp sau:
Giữ ổn định bằng hệ dàn thép hình, giữ ổn định bằng phƣơng pháp neo trong đất,
giữ ổn định bằng phƣơng pháp thi công Top-down.
3.1.2. Nguyên nhân gây ra chuyển dịch biến dạng của tường vây
Trong quá trình đào đất để thi công móng và tầng hầm công trình nhà cao
tầng, khi lấy đi một lƣợng đất nào đó sẽ làm thay đổi trạng thái ứng suất dẫn tới
biến dạng của khối đất quanh hố đào. Đất sẽ chuyển dịch về phía hố đào và làm cho
tƣờng vây có thể bị chuyển dịch.
3.1.3. Mục đích quan trắc chuyển dịch ngang của tường vây
Quan trắc chuyển dịch ngang tƣờng vây nhằm các mục đích xác định mức độ
chuyển dịch biến dạng, nghiên cứu tìm ra nguyên nhân chuyển dịch biến dạng của
tƣờng vây và từ đó có biện pháp xử lý, đề phòng sự cố đối với công trình và công
trình lân cận, cụ thể là:
- Xác định giá trị chuyển dịch ngang của tƣờng vây để đánh giá độ ổn
định của tƣờng vây (tƣờng tầng hầm), phòng ngừa các sự cố hƣ hỏng, đổ vỡ có
thể xảy ra.
- Kết quả quan trắc là số liệu đối chứng để kiểm tra các tính toán trong giai
đoạn thiết kế hố đào để đề ra chế độ thi công hố đào một cách hợp lý.

42
3.1.4. Yêu cầu độ chính xác và chu kỳ quan trắc chuyển dịch ngang tường vây
3.1.4.1. Yêu cầu độ chính xác quan trắc
Yêu cầu độ chính xác quan trắc chuyển dịch ngang tƣờng vây phụ thuộc chủ
yếu vào đặc điểm kết cấu của tƣờng vây, biện pháp thi công hố đào và đƣợc xác
định bằng một trong hai cách sau:
Cách 1: Dựa vào giá trị chuyển dịch ngang dự báo (do đơn vị thiết kế cung
cấp) xác định yêu cầu độ chính xác quan trắc theo công thức (3.1):
εq
qm
2 (3.1)
Trong đó: mq - yêu cầu độ chính xác quan trắc chuyển dịch ngang ở thời điểm ti; q -
giá trị chuyển dịch ngang dự báo giữa 2 chu kỳ quan trắc; - hệ số đặc trƣng cho độ
tin cậy của kết quả quan trắc, phụ thuộc vào xác xuất đƣợc chấp nhận. Đối với công
tác quan trắc biến dạng thƣờng lấy xác xuất P = 0.997, (tƣơng ứng với =3) và khi
đó công thức tính độ chính xác quan trắc chuyển dịch là:
qm 0.17q (3.2)
Cách 2: Trong thực tế, yêu cầu độ chính xác quan trắc thƣờng đƣợc xác
định dựa vào điều kiện nền móng, đặc điểm kết cấu đối với từng loại công trình cụ
thể (các tiêu chuẩn này do cơ quan quản lý ngành ban hành). Hiện nay vẫn chƣa có
một tiêu chuẩn nào quy định cụ thể về độ chính xác quan trắc chuyển dịch ngang
tƣờng vây. Vì vậy, có thể sử dụng các cấp đo chuyển dịch ngang trong TCVN
9399:2012 “Nhà và công trình xây dựng – Xác định chuyển dịch ngang bằng
phương pháp trắc địa” [38] để quan trắc chuyển dịch ngang tƣờng vây. Theo tiêu
chuẩn này việc đo chuyển dịch ngang công trình đƣợc chia làm ba cấp: cấp I, cấp II
và cấp III. Sai số trung phƣơng cho phép quan trắc chuyển dịch ngang và các cấp đo
đƣợc đƣa ra ở bảng 3.1.
Bảng 3.1. Sai số trung phương cho phép quan trắc chuyển dịch ngang và các cấp đo
TT Cấp đo Sai số trung phƣơng quan trắc chuyển dịch ngang
(mm)
1 Cấp 1 1 đến 5
2 Cấp 2 5 đến 10
3 Cấp 3 10 đến 15

43
3.1.4.2. Chu kỳ quan trắc chuyển dịch ngang tường vây
Quan trắc chuyển dịch ngang tƣờng vây là dạng công tác đo lặp, đƣợc thực
hiện nhiều lần, mỗi lần đo gọi là một chu kỳ quan trắc. Thời gian thực hiện các chu
kỳ quan trắc phải đƣợc tính toán sao cho kết quả quan trắc phản ánh đúng thực chất
quá trình chuyển dịch của tƣờng vây. Nếu chu kỳ đo thƣa thì sẽ không xác định
đƣợc đúng quy luật chuyển dịch, ngƣợc lại nếu ấn định chu kỳ quan trắc quá dày sẽ
dẫn đến lãng phí nhân lực, tài chính và các chi phí khác (thực tế chu kỳ quan trắc
chuyển dịch ngang tƣờng vây thƣờng phụ thuộc vào tốc độ thi công hố đào). Chu kỳ
quan trắc đầu tiên cần đƣợc thực hiện trƣớc khi thi công hố đào.
3.2. QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY BẰNG PHƢƠNG PHÁP
TRẮC ĐỊA
3.2.1. Thiết kế kết cấu và phân bố mốc quan trắc chuyển dịch ngang tường vây
3.2.1.1. Thiết kế kết cấu mốc quan trắc chuyển dịch ngang tường vây
1. Mốc khống chế cơ sở
Mốc khống chế cơ sở (mốc chuẩn) đƣợc đặt ngoài phạm vi chuyển dịch của
tƣờng vây, tại những vị trí có điều kiện địa chất ổn định. Mốc cơ sở có 3 loại thƣờng
dùng là mốc nổi, mốc chìm và mốc có định tâm bắt buộc. Trong TCVN 9399:2012
[38] đã thể hiện đầy đủ cấu tạo mốc chuẩn đo chuyển dịch ngang công trình mà có
thể sử dụng để làm mốc chuẩn quan trắc chuyển dịch ngang tƣờng vây.
2. Mốc quan trắc tường vây
Mốc quan trắc đƣợc gắn trên đỉnh tƣờng vây tại những vị trí cần theo dõi
chuyển dịch. Kết cấu mốc phải đƣợc lựa chọn cẩn thận để bảo đảm độ bền vững, có
thể bảo quản lâu dài và thuận lợi cho cho việc đặt thiết bị quan trắc.
Hình 3.11. Cấu tạo mốc quan trắc chuyển dịch ngang đỉnh tường vây

44
3.2.1.2. Phân bố mốc quan trắc chuyển dịch ngang tường vây
Mốc khống chế cơ sở đƣợc đặt ngoài phạm vi chuyển dịch của tƣờng vây, tại
những vị trí có điều kiện địa chất ổn định. Số lƣợng mốc khống chế cơ sở cần ít
nhất là 3 mốc để mỗi chu kỳ quan trắc có thể tiến hành phân tích đánh giá độ ổn
định của mốc khống chế cơ sở. Các mốc khống chế cơ sở đƣợc bố trí sao cho khi đo
nối các này với nhau tạo thành một mạng lƣới gọi là lƣới khống chế cơ sở.
Mốc quan trắc đƣợc đặt tại các vị trí đặc trƣng của tƣờng vây và thƣờng đặt
theo chu vi của tƣờng. Khoảng cách giữa các mốc thƣờng đƣợc bố trí tùy vào hình
dạng của tƣờng vây và do đơn vị thiết kế chỉ định (thông thƣờng khoảng cách giữa
các mốc từ 20m đến 30m).
3.2.2. Thiết kế hệ thống lưới quan trắc chuyển dịch ngang tường vây
3.2.2.1. Cấu trúc hệ thống lưới mặt bằng quan trắc chuyển dịch ngang tường vây
Để thực hiện quan trắc chuyển dịch tƣờng vây cần phải xây dựng một mạng
lƣới khống chế với 2 loại điểm mốc:
Hệ thống mốc loại 1 đƣợc xây dựng tại các vị trí cố định bên ngoài phạm vi
ảnh hƣởng chuyển dịch của tƣờng vây, các mốc này có tác dụng là cơ sở tọa độ gốc
cho toàn bộ công tác quan trắc và đƣợc gọi là mốc khống chế cơ sở. Yêu cầu đối
với điểm mốc khống chế là phải có vị trí ổn định trong suốt quá trình quan trắc.
Hệ thống mốc loại 2 là các mốc gắn trên tƣờng vây, cùng chuyển dịch với
tƣờng vây và đƣợc gọi là mốc quan trắc.
Trong mỗi chu kỳ quan trắc cần thực hiện các phép đo để xác định vị trí
tƣơng đối giữa các điểm mốc khống chế nhằm kiểm tra và đánh giá độ ổn định của
các mốc đó, nhƣ vậy sẽ tạo thành một bậc lƣới đƣợc gọi là lƣới khống chế. Đồ hình
đo nối giữa hệ thống mốc quan trắc với các mốc khống chế tạo ra bậc lƣới thứ 2,
đƣợc gọi là bậc lƣới quan trắc.
3.2.2.2. Yêu cầu độ chính xác các bậc lưới quan trắc chuyển dịch ngang tường vây
Yêu cầu độ chính xác đối với các cấp lƣới trong quan trắc chuyển dịch ngang
tƣờng vây đƣợc xác định trên cơ sở yêu cầu độ chính xác chuyển dịch. Giá trị của
sai số giới hạn này (ký hiệu là mq) thƣờng đƣợc đƣa ra trong bản thiết kế kỹ thuật
công trình. Yêu cầu sai số xác định chuyển dịch đối với các cấp lƣới đƣợc xác định

45
theo các công thức sau:
- Đối với lƣới cơ sở:
CS
q
q 2
mm =
1 k (3.3)
- Đối với lƣới quan trắc:
QT
q
q 2
k.mm =
1 k (3.4)
Trong các công thức (3.3) và (3.4): mq - độ chính xác yêu cầu quan trắc chuyển dịch
ngang; k là hệ số giảm độ chính xác giữa 2 cấp lƣới (thông thƣờng k = 2÷3).
3.2.2.3. Ước tính độ chính xác lưới quan trắc chuyển dịch ngang tường vây
Giống nhƣ trong trƣờng hợp quan trắc độ lún, ƣớc tính độ chính xác lƣới mặt
bằng trong quan trắc chuyển dịch ngang tƣờng vây đƣợc thực hiện nhằm giải quyết
một trong 2 bài toán:
1- Xác định độ chính xác các yếu tố của lƣới khi đồ hình lƣới và sai số đo
các đại lƣợng (góc, chiều dài) đã đƣợc lựa chọn. Các yếu tố cần ƣớc tính trong lƣới
quan trắc chuyển dịch ngang thƣờng là: sai số vị trí điểm, sai số vị trí theo hƣớng,
sai số phƣơng vị và chiều dài cạnh.
2- Xác định sai số đo các yếu tố của lƣới trong trƣờng hợp cho trƣớc đồ hình
và chỉ tiêu sai số của một số đại lƣợng nào đó mà lƣới cần đáp ứng.
Ƣớc tính lƣới thƣờng đƣợc thực hiện theo phƣơng pháp chặt chẽ trên cơ sở
thuật toán bình sai gián tiếp thông qua các phần mềm chuyên ngành trên máy tính.
3.2.3. Quan trắc chuyển dịch ngang tường vây bằng lưới đo góc - cạnh
Chuyển dịch ngang của tƣờng vây đƣợc xác định trên cơ sở so sánh tọa độ
mốc quan trắc ở các thời điểm (chu kỳ) đo khác nhau. Trong mỗi chu kỳ thƣờng xây
dựng một bậc lƣới trắc địa liên kết các mốc quan trắc, mạng lƣới này đƣợc định vị
theo hệ tọa độ của lƣới khống chế cơ sở. Tùy thuộc địa hình thực địa và đặc điểm
kết cấu của tƣờng vây, có thể thành lập lƣới quan trắc bằng các phƣơng pháp tam
giác, đa giác, giao hội hoặc lƣới đo hƣớng chuẩn.

46
3.2.3.1. Phương pháp tam giác
Phƣơng pháp tam giác (với các đồ hình đo góc, đo cạnh hoặc đo góc-cạnh)
đƣợc ứng dụng để quan trắc chuyển dịch ngang của tƣờng vây có hình dạng phức
tạp. Các mốc quan trắc đƣợc bố trí ở những vị trí đặc trƣng của tƣờng vây, có kết
cấu thuận tiện cho việc đặt máy, gƣơng hoặc bảng ngắm. Để đo các yếu tố (góc,
cạnh) trong lƣới hiện nay thƣờng sử dụng máy toàn đạc điện tử độ chính xác cao.
Lƣới quan trắc đƣợc xây dựng theo hình thức tam giác thƣờng là mạng lƣới dày
đặc với đồ hình rất chặt chẽ, cho phép xác định tọa độ các điểm trong lƣới với độ chính
xác cao. Tuy nhiên, do số lƣợng trị đo trong lƣới tam giác thƣờng là lớn nên việc đo đạc
trong mạng lƣới cũng tốn nhiều thời gian, công sức và các chi phí khác. Trên hình 3.12
nêu ví dụ về một mạng lƣới quan trắc chuyển dịch ngang đỉnh tƣờng vây công trình nhà
cao tầng bằng phƣơng pháp tam giác.
Hình 3.12. Sơ đồ lưới tam giác quan trắc chuyển dịch ngang tường vây
3.2.3.2. Phương pháp đa giác
Phƣơng pháp đa giác đƣợc sử dụng để quan trắc chuyển dịch ngang tƣờng
vây có dạng hình cung. Trên mỗi tuyến quan trắc xây dựng 1 đƣờng chuyền qua các

47
mốc gắn tại đỉnh tƣờng vây, ở hai đầu đƣợc dựa trên 2 điểm khống chế cơ sở và đo
nối ít nhất 2 phƣơng vị gốc. Đo góc, cạnh trong tuyến đa giác bằng máy toàn đạc
điện tử chính xác.
QT1
QT2
QT3QT4
QT5
MC3MC4
MC2MC1
Hình 3.13. Sơ đồ lưới đa giác quan trắc chuyển dịch tường vây
3.2.3.3. Phương pháp giao hội
Các dạng lƣới giao hội (giao hội góc, giao hội cạnh và giao hội góc- cạnh) có
thể đƣợc áp dụng để quan trắc chuyển dịch ngang tƣờng vây một cách hiệu quả.
Trong lƣới giao hội, máy đo đƣợc đặt tại các điểm khống chế cơ sở, tiêu ngắm
(hoặc gƣơng) đặt tại các mốc quan trắc. Từ các điểm lƣới khống chế tiến hành đo
các yếu tố cần thiết (góc, cạnh hoặc góc - cạnh) đến tất cả các điểm quan trắc trên
tƣờng vây.
Hình 3.14 là sơ đồ lƣới quan trắc chuyển dịch ngang tƣờng vây bằng phƣơng
pháp giao hội.
Hình 3.14. Sơ đồ lưới giao hội quan trắc chuyển dịch tường vây

48
3.2.4. Quan trắc chuyển dịch ngang tường vây bằng phương pháp hướng chuẩn
Phƣơng pháp hƣớng chuẩn thƣờng đƣợc áp dụng để quan trắc chuyển dịch
ngang đối với công trình có dạng thẳng. Trong phƣơng pháp hƣớng chuẩn thƣờng
lấy trục hoành trùng với hƣớng chuẩn. Cơ sở lý thuyết và phƣơng pháp xử lý số liệu
trong quan trắc chuyển dịch ngang bằng hƣớng chuẩn đã đƣợc đề cập ở các tài liệu
[7], [17], [38].
Phƣơng pháp hƣớng chuẩn có ƣu điểm là đơn giản, dễ thực hiện và cho độ
chính xác cao. Trƣớc đây phƣơng pháp này chỉ cho phép xác định chuyển dịch theo
một hƣớng (vuông góc với hƣớng chuẩn), ngày nay với sự ra đời các máy toàn đạc
điện tử (TĐĐT) có độ chính xác cao thì chuyển dịch theo hƣớng còn lại đƣợc xác
định bằng cách đo bổ sung chiều dài cạnh từ điểm khống chế đến điểm quan trắc.
Điều này khắc phục một trong những nhƣợc điểm của phƣơng pháp hƣớng chuẩn và
mở rộng đáng kể khả năng ứng dụng của sơ đồ đo này.
Phƣơng pháp hƣớng chuẩn đƣợc áp dụng để quan trắc chuyển dịch ngang
tƣờng vây dạng thẳng, thực tế các tƣờng vây nhà cao tầng hiện nay thƣờng có chiều
dài ngắn (< 200m), do đó đồ hình hƣớng chuẩn để quan trắc chuyển dịch ngang
tƣờng vây nhà cao tầng thƣờng có dạng đồ hình hƣớng toàn phần. Lƣới khống chế cơ
sở trong sơ đồ hƣớng chuẩn thƣờng có 2 dạng đồ hình, đó là: đồ hình tam giác và đồ
hình hƣớng chuẩn.
M1M2M3M4
D C
//X
AB
Hình 3.15. Sơ đồ hướng chuẩn quan trắc chuyển dịch ngang tường vây
Trên hình 3.15: A, B, C, D: Điểm khống chế; M1, M2, M3, M4: Điểm quan trắc.
3.2.5. Quan trắc chuyển dịch ngang tường vây bằng hệ thống quan trắc tự động
3.2.5.1. Giới thiệu hệ thống quan trắc tự động
, Singapo,

49
Cấu tạo của hệ thống quan trắc tự động bao gồm các phần sau [61]:
Phần cứng: Phần cứng là các thiết bị GNSS, GPS, các thiết bị định vị cục bộ
trên mặt đất (LPS) nhƣ các trạm quan trắc toàn đạc điện tử (Georobot), các dụng cụ đo
thủy chuẩn và cảm biến cục bộ bổ sung (LS) nhƣ các cảm biến ứng suất và biến dạng.
Phần mềm điều khiển phần cứng: là modul điều khiển phần cứng và
truyền thông dùng để thu thập dữ liệu từ các thiết bị GNSS, GPS và LPS.
Phần mềm phân tích biến dạng: Phần mềm điều khiển phần cứng cung cấp
dữ liệu đã lấy mẫu trong một định dạng giao diện dữ liệu xác định có tên định dạng
GKA và cung cấp dữ liệu đến thành phần phần mềm thứ 2 mang tên phần mềm phân
tích biến dạng. Phần mềm này có nhiệm vụ tiếp tục xử lý dữ liệu GNSS và LPS trong
một quy trình bình sai bao gồm 3 bƣớc. Bƣớc 1 là khởi động hệ quy chiếu quan trắc -
tọa độ và ma trận hiệp phƣơng sai - bao gồm các điểm mốc chuẩn cố định. Bƣớc 2 và 3
bao gồm thiết lập mối quan hệ tọa độ 3 chiều của điểm quan trắc với điểm mốc chuẩn
và đồng thời phân tích biến dạng, cảnh báo biến dạng. Các thông điệp cảnh báo từ mức
đƣa ra thông tin, nhắc nhở, báo động đƣợc truyền đến ngƣời vận hành, quản lý bằng
các phƣơng thức: Báo động – Alarm, tin nhắn – SMS, thƣ điện tử - Email…
3.2.5.2. Quan trắc tự động chuyển dịch tường vây bằng máy toàn đạc điện tử
Thiết bị dùng để quan trắc tự động trong trƣờng hợp này là một loại toàn đạc
điện tử có khả năng thay thế con ngƣời tiến hành tự động thu thập, theo dõi phân
biệt, ngắm chính xác mục tiêu để thu đƣợc thông tin về góc, khoảng cách, tọa độ
không gian 3 chiều. Máy toàn đạc điện tử thực hiện tự điều khiển, tự động hoàn
thành ngắm chuẩn, đọc số hoàn toàn thay thế các thao tác thủ công của con ngƣời.
Máy toàn đạc kết hợp với hệ thống phần mềm có thể lập kế hoạch đo, điều khiển
quá trình đo, tiến hành xử lý và phân tích số liệu đo, hoàn toàn có thể thay thế con
ngƣời hoàn thành nhiều nhiệm vụ trắc địa.
Quan trắc tự động chuyển dịch tƣờng vây bằng máy toàn đạc điện tử
(TĐĐT) là phƣơng thức quan trắc lâu dài hoàn toàn tự động dạng cố định, sử dụng

50
hệ thống quan trắc biến dạng dựa trên một (hoặc nhiều hơn một) máy toàn đạc điện
tử kết hợp với hệ thống gƣơng phản xạ gắn ở tƣờng vây, có thể thực hiện quan trắc
suốt ngày đêm, thực chất là hệ thống đo tọa độ cực tự động.
a-Trung tâm điều khiển từ xa
b-Đồ hình mạng lưới quan trắc
Hình 3.16. Quan trắc tự động chuyển dịch của tường vây bằng máy TĐĐT
3.17. Điểm khống chế cơ sở 3.18. Gương quan trắc
gắn cố định trên tường vây
Trạm máy quan trắc: Là điểm gốc của hệ thống tọa độ cực, dùng để đặt máy
toàn đạc điện tử, yêu cầu đối với trạm máy quan trắc là phải có điều kiện nhìn thông tốt
tới các mốc chuẩn và điểm quan trắc. Trạm máy quan trắc phải vững chắc và ổn định.
Điểm khống chế cơ sở: Điểm khống chế cơ sở phải đƣợc xây dựng ở chỗ ổn
định và nằm bên ngoài khu vực biến dạng, trên điểm khống chế cơ sở có kết cấu
mốc định tâm bắt buộc để đặt gƣơng phản xạ (hình 3.17).
3
1
2
4
Truyền dữ liệu

51
Điểm quan trắc: Là các điểm trực tiếp trên tƣờng vây và cùng chuyển dịch với
tƣờng vây. Điểm quan trắc thƣờng là các gƣơng phản xạ gắn cố định vào tƣờng vây
(hình 3.18).
Trung tâm điều khiển từ xa của hệ thống quan trắc tự động (hình 3.16-a),
gồm: 1 – Wireless; 2 – Bộ thu dữ liệu; 3 – Máy tính cài đặt phần mềm quan trắc; 4 –
Đèn và còi cảnh báo khi có biến dạng nguy hiểm.
Quá trình thu nhận số liệu đƣợc thực hiện bằng trung tâm điều khiển từ xa.
Trung tâm điều khiển đƣợc cấu thành từ máy tính và phần mềm quan trắc, thông qua
cáp thông tin điều khiển máy trắc địa thực hiện quan trắc biến dạng hoàn toàn tự động.
3.2.5.3. Phần mềm xử lý số liệu quan trắc tự động
Các phần mềm xử lý số liệu quan trắc tự động hiện nay gồm có các phần
mềm sau:
- Leica GeoMoS monitoring software của hãng Leica (Thụy Sỹ)
- Trimble 4D Control của hãng Trimble (Mỹ)
- Rapid software của hãng Topcon (Nhật)
- GOCA software của Đức
Các phần mềm trên là các phần mềm thu thập và phân tích dữ liệu, phân tích
biến dạng, cảnh báo biến dạng hoàn toàn tự động. Trong các phần mềm xử lý số
liệu này thƣờng có cả tính năng kiểm tra độ ổn định của các mốc khống chế cơ sở.
Nhận xét: Hệ thống quan trắc tự độ ạc điện tử
ắc có nhiều ƣu điểm nổi trội hơn so với công nghệ truyền thống, đó là:
thời gian cung cấp kết quả nhanh nhất, cung cấp đƣợc nhiều thông tin nhất, giảm tối
đa các nguồn sai số đo và tính toán do yếu tố chủ quan của con ngƣời.
3.2.6. Xử lý số liệu quan trắc chuyển dịch ngang tường vây
3.2.6.1. Phân tích đánh giá độ ổn định các mốc cơ sở trong quan trắc chuyển dịch
ngang tường vây
1. Tiêu chuẩn đánh giá độ ổn định của mốc khống chế cơ sở
Tiêu chuẩn ổn định cho các điểm mốc của lƣới khống chế sơ sở sẽ là: Điểm
khống chế được coi là ổn định nếu chênh lệch tọa độ của điểm ở chu kỳ đang xét so
với chu kỳ đầu không vượt quá sai số giới hạn xác định độ chênh lệch đó.

52
Tiêu chuẩn nêu trên đƣợc cụ thể hóa bằng biểu thức [17]:
ii qq t.m (3.5)
Trong đó: qi và iq
m là giá trị chênh lệch và sai số tƣơng ứng; t: là hệ số xác định
tiêu chuẩn sai số giới hạn, thông thƣờng t lấy giá trị trong khoảng từ 2 đến 3.
Sau bình sai lƣới khống chế cơ sở, giá trị tính đƣợc của công thức (3.5)
thƣờng không giống nhau đối với các điểm trong lƣới. Vì vậy, có thể dựa vào sai số
trung phƣơng cần thiết để xác định chuyển dịch ngang đối với các điểm khống chế
cơ sở (csqm ) để xác định tiêu chuẩn thống nhất chung cho toàn bộ mạng lƣới, khi đó
tiêu chuẩn (3.5) sẽ đƣợc viết lại là:
csi qq t.m (3.6)
Dựa trên yêu cầu độ chính xác xác định chuyển dịch ngang thì:
q
i2
mq t.
1 k (3.7)
Trong công thức (3.7): qi - chuyển dịch ngang của điểm khống chế cơ sở ở chu kỳ
đang xét so với chu kỳ đầu; mq - yêu cầu độ chính xác xác định chuyển dịch ngang;
t: là hệ số xác định tiêu chuẩn sai số giới hạn (t = 2÷3); k - hệ số suy giảm độ chính
xác giữa các bậc lƣới (k = 2÷3).
2. Phân tích độ ổn định mốc khống chế cơ sở
Hiện nay, phƣơng pháp bình sai lƣới tự do đã đƣợc áp dụng rộng rãi ngoài
sản xuất để phân tích độ ổn định mốc khống chế cơ sở trong quan trắc chuyển dịch
ngang công trình. Có thể áp dụng quy trình phân tích độ ổn định mốc khống chế cơ
sở bằng phƣơng pháp bình sai lƣới tự do nhƣ đã đƣợc trình bày trong tài liệu [17].
3.2.6.2. Bình sai lưới quan trắc
Lựa chọn phƣơng pháp bình sai là một bƣớc quan trọng trong việc xử lý số
liệu lƣới quan trắc. Khi yêu cầu đo chuyển dịch với độ chính xác cao thì phƣơng
pháp phù hợp để xử lý lƣới quan trắc là bình sai kết hợp hai bậc lƣới (lƣới khống
chế và lƣới quan trắc) nhƣ một mạng lƣới tự do duy nhất. Trƣờng hợp còn lại tiến
hành bình sai lƣới quan trắc nhƣ lƣới phụ thuộc với số liệu gốc là tọa độ của các

53
điểm khống chế cơ sở ổn định. Trên cơ sở các số liệu đo đạc, loại bỏ các sai số thô,
sai số hệ thống, tiến hành tính toán xử lý lƣới quan trắc theo phƣơng pháp bình sai
đã lựa chọn.
3.2.7. Tính toán tham số chuyển dịch ngang của tường vây
3.2.7.1. Tính toán các tham số chuyển dịch cục bộ
Các tham số chuyển dịch cục bộ tƣờng vây bao gồm: chuyển dịch theo
hƣớng trục tọa độ và chuyển dịch theo hƣớng áp lực (hƣớng vuông góc với tƣờng
vây). Các tham số này đƣợc tính cho từng điểm quan trắc bằng cách so sánh tọa độ
các điểm trong 2 chu kỳ đo. Cụ thể giá chuyển dịch từng điểm quan trắc đƣợc tính
theo các công thức sau (hình 3.19):
Hình 3.19. Tham số chuyển dịch ngang tường vây
1. Chuyển dịch theo hướng trục tọa độ
- Chuyển dịch theo hƣớng trục X và trục Y:
(j) (i)
Xq = X - X
(3.8)
(j) (i)
Yq = Y - Y
(3.9)
- Giá trị vector chuyển dịch tổng hợp:
2 2
X Yq = q + q (3.10)
- Hƣớng của vector chuyển dịch:
Y
X
qArctg
q (3.11)
Trong các công thức (3.8), (3.9): (X(i)
, Y(i)
), (X(j)
, Y(J)
) là tọa độ điểm quan
trắc, đƣợc xác định trong 2 chu kỳ i và j tƣơng ứng.
X
O Y
qT
qX q
q qY

54
2. Chuyển dịch theo hướng
Đối với công tác quan trắc chuyển dịch ngang tƣờng vây thì chuyển dịch cần
quan tâm nhất là chuyển dịch theo hƣớng vuông góc với tƣờng vây, vì vậy cần phải
tính giá trị chuyển dịch theo hƣớng vuông góc với tƣờng vây.
Khi phân tích vector chuyển dịch theo hƣớng áp lực lớn nhất ( ) sẽ xác định
đƣợc 2 thành phần chuyển dịch.
- Chuyển dịch theo hƣớng áp lực – hƣớng vuông góc với tƣờng vây (kí hiệu q ).
- Chuyển dịch theo hƣớng vuông góc với hƣớng áp lực, đƣợc gọi là chuyển
dịch hƣớng tiếp tuyến hay chuyển dịch song song với tƣờng vây (ký hiệu qT).
Từ hình 3.19 xác định đƣợc giá trị 2 thành phần chuyển dịch nêu trên theo
các công thức sau:
X Yq = q .cos( ) + q .sin( ) (3.12)
T X Yq = q .sin( ) - q .cos( ) (3.13)
Trong công thức (3.12), (3.13): ( ) – là góc hợp bởi giữa hƣớng trục X và
hƣớng vuông góc với tƣờng vây.
Các tham số chuyển dịch cục bộ cho phép đánh giá chuyển dịch của tƣờng
vây tại từng vị trí quan trắc.
3.2.7.2. Thể hiện đồ họa chuyển dịch ngang tường vây
Đối với mỗi điểm mốc quan trắc cần lập bảng thống kê tọa độ và chuyển dịch
so với chu kỳ quan trắc đầu tiên, trên cơ sở đó lập sơ đồ chuyển dịch để thể hiện trực
quan giá trị và hƣớng chuyển dịch của mốc quan trắc. Đối với tƣờng vây dạng thẳng
có bố trí nhiều điểm quan trắc, dựa vào các điểm quan trắc chúng ta vẽ đƣợc mặt cắt
thể hiện diễn biến chuyển dịch ngang của cả tƣờng vây.
3.2.8. Đề xuất xử lý số liệu hệ thống quan trắc tự động khi quan trắc nhiều
hơn một trạm máy
Phƣơng pháp quan trắc tự động bằng máy toàn đạc điện tử từ một trạm máy
thực chất là phƣơng pháp đo tọa độ cực và không có trị đo thừa do đó độ tin cậy không
cao và có thể dẫn tới sai lầm. Để tăng thêm trị đo thừa của trị đo cần áp dụng phƣơng
pháp quan trắc từ hai hay nhiều trạm máy cùng một thời điểm. Một vấn đề đặt ra là các
hãng cung cấp thiết bị quan trắc tự động hiện nay thƣờng chỉ đề cập đến quan trắc tự

55
động bằng 1 trạm máy, vì vậy cần phải có biện pháp xử lý số liệu thích hợp khi quan
trắc đồng thời hai hay nhiều trạm máy. Trong quan trắc tự động bằng máy TĐĐT, tại
mỗi trạm máy quan trắc sẽ xác định trực tiếp cho chúng ta tọa độ (x, y) của điểm quan
trắc, khi đo từ nhiều trạm máy đến 1 điểm quan trắc sẽ thu đƣợc nhiều giá trị tọa (x, y).
Để tìm tọa độ tin cậy nhất của điểm quan trắc thì cần tiến hành bình sai tọa độ của điểm
quan trắc. Quá trình tính toán xử lý số liệu đƣợc thực hiện nhƣ sau:
Hình 3.20. Đồ hình quan trắc tự động nhiều hơn 1 trạm máy
Trên hình 3.20: A, B, C là điểm bố trí trạm máy quan trắc; P là điểm quan trắc.
Từ hình 3.20, tọa độ của điểm quan trắc đƣợc xác định nhƣ sau:
G 0 G
G 0 G
x x S.cos( ) x S.cos
y y S.sin( ) y S.sin (3.14)
Trong công thức (3.14): x, y: là tọa độ của điểm quan trắc; xG, yG là tọa độ
của điểm trạm máy; S là khoảng cách từ trạm máy đến điểm quan trắc; α là phƣơng
vị cạnh đo.
Triển khai tuyến tính biểu thức 3.14 thu đƣợc:
(0)
G
(0)
G
x x cos .dS S.sin .d x
y y sin .dS S.cos .d y (3.15)
Biểu thức 3.14 đƣợc viết lại nhƣ sau:
(0)
G
(0)
G
x - xx cos -S.sin dSx
y sin S.cos d y - y (3.16)
Trong công thức (3.16): x(0)
, y(0)
- tọa độ gần đúng của điểm quan trắc.
Ký hiệu: Kxy là ma trận tƣơng quan của tọa độ điểm quan trắc (x, y) và KSα là ma
trận tƣơng quan của cạnh đo (S, β). Khi đó:
A
3
y O
x
B
P
S1 α1 S2 α2
1 2
C S3 α3

56
xy S
cos S.sin cos sinK .K .
sin S.cos S.sin S.cos (3.17)
Với
2
S
S 2
m 0K
0 m tính đƣợc:
2 2
2 2 2 2 2 2
S S
xy 2
2 2 2 2
S
m mcos .m S .sin . cos .sin .m S .sin .cos .
Km
sin .m S .cos .
(3.18)
Nhƣ vậy, ma trận trọng số của trị đo (x, y) là:
12 2
2 2 2 2 2 2
S S
2 1
xy xy 2
2 2 2 2
S
m m1 1cos .m S .sin . sin 2 .m S .sin 2
2 2P .K
m sin .m S .cos .
(3.19)
Coi x, y là các trị đo phụ thuộc, đối với mỗi trị đo tọa độ cực sẽ viết đƣợc
phƣơng trình số hiệu chỉnh.
Trong hệ thống quan trắc tự động giá trị tọa độ thu đƣợc là các trị đo:
®o
®o
x = x
y = y (3.20)
Suy ra:
x x
y y
V l1 0 xx
V l0 1 y (3.21)
Khi điểm quan trắc đƣợc đo từ n trạm quan trắc tới, với tọa độ gần đúng là
x(0)
, y(0)
. Khi đó:
1
1
n
n
(0)x1
(0)y1
(0)xn
(0)yn
vx - x1 0
vy - y0 1x
. . x . . .y
1 0 vx - x
0 1 vy - y
(3.22)

57
Ký hiệu:
1
1
n
n
(0)x1
(0)y1
(0)xn
(0)yn
vx - x1 0
vy - y0 1x
A . . ; X ; L . . ; V .y
1 0 vx - x
0 1 vy - y
Khi đó, hệ phƣơng trình (3.21) đƣợc viết dƣới dạng:
A.δX + L = V (3.23)
Với ma trận trọng số:
1
2
n
P
PP
.
P
; (3.24)
Trong đó, đối với mỗi điểm quan trắc trọng số Pi đƣợc tính theo công thức (3.19).
Áp dụng nguyên lý số bình phƣơng nhỏ nhất ta có:
T TA PA X A PL 0 (3.25)
-1
T TX - A PA A PL (3.26)
Tọa độ sau bình sai của điểm quan trắc đƣợc tính theo công thức:
(0)
(0)
x = x + δx
y = y + δy (3.27)
Nhƣ vậy, có thể thấy rằng phƣơng pháp xử lý số liệu quan trắc từ nhiều trạm
đo nhƣ đề xuất ở trên cho phép nâng cao độ tin cậy của hệ thống quan trắc tự động.
3.2.9. Nhận xét chung về quan trắc chuyển dịch ngang tường vây bằng
phương pháp trắc địa
Phƣơng pháp trắc địa có ƣu điểm là cung cấp độ chính xác cao và cho giá trị
chuyển dịch tuyệt đối vì chuyển dịch của các điểm quan trắc đƣợc xác định trong hệ
thống mốc khống chế cơ sở ổn định, tuy nhiên một nhƣợc điểm rất lớn là phƣơng
pháp trắc địa thƣờng chỉ phát hiện đƣợc chuyển dịch của đỉnh tƣờng vây. Trong khi
đó, khi thi công móng và tầng hầm công trình nhà cao tầng yêu cầu phải quan trắc

58
tƣờng vây theo chiều sâu trong suốt quá trình thi công móng và tầng hầm. Để quan
trắc chuyển dịch ngang tƣờng vây theo chiều sâu, hiện nay thƣờng sử dụng cảm
biến Inclinometer. Nội dung phƣơng pháp quan trắc chuyển dịch ngang tƣờng vây
bằng cảm biến Inclinometer đƣợc trình bày ở mục 3.3.
3.3. QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY BẰNG CẢM
BIẾN INCLINOMETER
3.3.1. Cấu tạo Inclinometer
Cảm biến Inclinometer
, ...
Thiết bị này cũng có thể đƣợc dùng để theo dõi biến dạng ngang của tƣờng chắn và
cọc. Cấu tạo của Inclinmeter thể hiện trong hình 3.21 gồm 4 bộ phận chính: (1) ống
dẫn hƣớng, (2) đầu đo, (3) cáp tín hiệu, (4) thiết bị đọc số.
Hình 3.21. Cấu tạo thiết bị đo chuyển dịch ngang Inclinometer
3.3.2. Nguyên lý đo chuyển dịch ngang bằng Inclinometer
Đo chuyển dịch bằng Inclinometer là đo gián tiếp chuyển dịch của đối tƣợng
cần quan trắc thông qua chuyển dịch của ống dẫn hƣớng. Khi đo chuyển dịch, đầu
đo chuyển dịch ngang có bánh xe chạy theo các rãnh dọc theo ống dẫn hƣớng. Nó
bao gồm hai tốc kế đã cân bằng lực, một tốc kế đo độ nghiêng trong mặt phẳng của
các bánh xe đầu đo chuyển dịch ngang, mặt phẳng này đƣợc gọi là trục A, tốc kế kia
đo độ nghiêng trong mặt phẳng vuông góc với mặt phẳng của các bánh xe, mặt
phẳng này đƣợc gọi là trục B (hình 3.22).
1
4 2
3

59
Phƣơng pháp tính toán trong việc quan trắc chuyển dịch ngang bằng
Inclinometer là lấy đáy của ống đo làm cơ sở để xác định các chuyển dịch tại các vị trí
đo phía trên, do vậy đáy của ống đo phải đảm bảo điều kiện không đƣợc chuyển dịch.
Hình 3.22. Các hướng quy ước trong quan trắc chuyển dịch ngang bằng Inclinometer
Hình 3.23. Sơ đồ tính toán trong đo chuyển dịch ngang bằng Inclinometer
Trên hình 3.23, độ lệch ngang cho từng vị trí đo theo một trục đƣợc xác định
theo công thức:
i id L.sin (3.28)
Trong đó: di - độ lệch ngang giữa hai điểm đo liền nhau theo một trục; L -
khoảng cách đo giữa hai điểm liền nhau; θi-là góc nghiêng so với phƣơng thẳng
đứng ở điểm đo thứ i.

60
Kết quả đƣợc hiển thị trên thiết bị thu tín hiệu và xuất ra không phải là góc
nghiêng hay độ lệch của ống dẫn hƣớng. Giá trị đo đƣợc phụ thuộc vào góc nghiêng
của ống và hằng số quan trắc, đƣợc thể hiện theo công thức sau:
A IC.sin (3.29)
Trong đó: A - giá trị đo tại mỗi vị trí (theo trục A); IC - hằng số quan trắc của thiết
bị đo chuyển dịch ngang.
Trong phép đo hai trục, kết quả có đƣợc là 2 giá trị trên mỗi trục cho mỗi vị
trí đo sau hai lần đo. Đầu đo quy ƣớc hƣớng “0” cho lần đo đầu và “180” cho lần đo
thứ hai. Phép đo hai trục này cho phép loại bỏ sai số tín hiệu có thể xảy ra trong quá
trình đo. Ngoài ra phép đo này còn chỉ ra những lỗi thông qua giá trị kiểm tra, giá trị
kiểm tra này là tổng đại số giá trị đo theo hai phƣơng “0” và “180” cho mỗi trục.
Để loại trừ sai số của phép đo, giá trị đo trên một trục tại mỗi vị trí đƣợc tính bằng
hiệu đại số giá trị đo theo hai phƣơng “0” và “180”.
0 180A - A
A 2
(3.30)
Trong đó: A0 - giá trị đo theo phƣơng “0” của trục A; A180 - giá trị đo theo phƣơng
“180” của trục A.
Độ lệch ngang của ống dẫn hƣớng theo một trục (trục A) cho từng vị trí đo:
i i0 180
i i
A - AAd = L.sin L L
IC 2IC (3.31)
Sự thay đổi độ lệch ngang tại mỗi khoảng cách đo ở các chu kỳ quan trắc cho
thấy ống dẫn hƣớng có sự chuyển dịch. Chuyển dịch đƣợc tính bằng cách lấy độ lệch
ngang hiện tại trừ đi độ lệch ngang ban đầu. Đồ thị của tổng các chuyển dịch cho thấy
sự chuyển dịch của ống dẫn hƣớng, đây cũng là sự chuyển dịch của đối tƣợng đƣợc
quan trắc.
Giá trị độ lệch ngang của một điểm bất kỳ theo một trục là tổng giá trị đo từ
đáy ống đến điểm ấy (hình 3.23), nó đƣợc gọi là giá trị tích lũy (d) và đƣợc tính
theo công thức sau:
d = d1 + d2 + d3 +…+ dn (3.32)
Trong đó: d - là độ lệch ngang của điểm n kể từ đáy ống (theo 1 trục); di - độ lệch
ngang của từng điểm theo 1 trục (i = 1 ÷ n).

61
Tổng các độ lệch ngang đƣợc gọi là tổng độ lệch của ống dẫn hƣớng, đồ thị của
tổng độ lệch cho thấy độ nghiêng của ống dẫn hƣớng so với phƣơng thẳng đứng.
Phần mềm chuyên dụng dựa trên các số liệu đã đƣợc xử lý để xây dựng biểu
đồ chuyển dịch của ống dẫn hƣớng (mốc). Mỗi vị trí quan trắc đƣợc thể hiện bằng 2
biểu đồ (hình 3.24).
Hình 3.24. Đồ thị chuyển dịch của điểm quan trắc bằng Inclinometer
Trên hình 3.24:
- Biểu đồ bên trái thể hiện chuyển dịch theo hƣớng A0 - A180.
- Biểu đồ bên phải thể hiện chuyển dịch theo hƣớng B0 - B180.
Mỗi biểu đồ đƣợc quy định thống nhất nhƣu sau:
- Trục tung: Độ sâu (m).
- Trục hoành: Chuyển dịch lũy tích tính từ đáy (mm).
- Đƣờng thẳng kéo dài bắt đầu từ tọa độ (0.0) lên đƣợc gọi là đƣờng biểu diễn
lần đo gốc (số liệu 0) S0, đây là lần đo đầu tiên, nên đƣợc coi là chƣa có chuyển dịch.

62
3.3.3. Độ chính xác đo chuyển dịch ngang bằng Inclinometer
Nhƣ đã đề cập ở trên, trị đo chuyển dịch bằng Inclinometer đƣợc so sánh
với điểm tham chiếu là đáy của ống dẫn hƣớng. Trƣờng hợp này, ống dẫn hƣớng
đƣợc neo chặt vào lớp đá gốc không có chuyển dịch nên các chu kỳ đo, điểm này
không có sai số. Đầu đo càng di chuyển lên cao sai số của việc đo chuyển dịch
ngang bằng Inclinometer càng lớn và điểm có sai số lớn nhất là điểm trên miệng
ống dẫn hƣớng ở trên mặt đất. Căn cứ vào lý lịch của thiết bị đo nhà sản xuất cung
cấp, đầu đọc số của Inclinometer hiện nay cho phép đọc số với giá trị hiển thị trên
màn hình tới 0.01mm, mỗi lần đầu đo di chuyển 0.5m trong ống dẫn hƣớng thì sẽ
đọc số với sai số mắc phải là 0.25mm và khi chiều dài của ống dẫn hƣớng là 25m
thì sai số tích lũy là 6mm [16], [86].
3.3.4. Quan trắc chuyển dịch ngang tường vây bằng Inclinometer
3.3.4.1. Lắp đặt ống dẫn hướng
Để quan trắc chuyển dịch tƣờng vây bằng Inclinometer
hiện chuyển dịch lớn nhất hoặc những vị trí kết cấu quan trọng (các vị trí này
thƣờng do đơn vị thiết kế đƣa ra).
cao hơn cao độ đỉnh tƣờng vây tối thiểu 10cm.
có
thể đƣợc buộc chặt vào lồng thép của tƣờng vây và đƣợc lắp đặt theo tiến độ thi
công tƣờng vây ống dẫn hƣớng
114mm đã đƣợc lắp đặt cố định trong lòng tƣờng
vây để đảm bảo ống dẫn hƣớng đƣợc cố định trong
lòng tƣờng vây và cùng chuyển dịch với tƣờng vây.
hay biến dạng trong suốt quá trình đo quan trắc. Mỗi ống dẫn hƣớng phải đƣợc lắp
đặt một nắp bảo vệ để đảm bảo không có dị vật rơi vào.

63
(a)
(b)
Hình 3.25. Lắp đặt ống đo chuyển dịch ngang Inclinometer tại công trường
3.3.4.2. Trình tự quan trắc
Nhƣ đã thể hiện ở hình 3.22, trong ống dẫn hƣớng Inclinometer tồn tại hai
trục đo A và B vuông góc với nhau và có thể coi đó là hệ trục tọa độ giả định x, y
của mỗi trị đo Inclinometer . Trƣớc khi tiến hành đo phải kết
nối đầu đo với bộ thu tín hiệu, chỉnh các bánh xe vào hƣớng A0-A180 của ống dẫn
hƣớng rồi thả
-
(cách nhau 0.5m), chờ cho giá trị trên màn hình của thiết bị đọc số ổn định rồi ghi
hoặc lƣu số liệu, lần lƣợt cho tới khi đầu đo lên đến miệng ống thu đƣợc chuỗi số
liệu A0. Lặp lại trình tự thao tác nhƣ trên nhƣng xoay đầu đo ngƣợc 1800 với hƣớng
vừa đo (A180-A0) sẽ thu đƣợc chuỗi số liệu A180.
Tiếp theo thả đầu đo vào ống dẫn hƣớng theo hƣớng B0-B180 vuông góc với
hƣớng A0-A180, làm tƣơng tự sẽ thu đƣợc chuỗi giá trị B0 và B180. Từ hình 3.23 có thể
thấy rằng các giá trị độ lệch ngang (di) đƣợc xác định bằng cách so sánh vớ
ổn định phải xây dựng thuật toán để xác định giá trị chuyển dịch bằng cách so sánh
với điểm tham chiếu là miệng ống, cụ thể quy trình tính toán xử lý số liệu đƣợc trình
bày ở phần sau. Ở chu kỳ đo đầu tiên ngay sau khi lắp đặt cần tiến hành vài lần rồi lấy
giá trị trung bình của các lần đo để tăng độ chính xác của số liệu ban đầu. Giá trị
chuyển dịch ngang đƣợc xác định thông qua so sánh kết quả quan trắc lần đầu tiên

64
(chu kỳ 1) với giá trị thu đƣợc của những chu kỳ quan trắc tiếp theo, do vậy nên sử
dụng cùng loại đầu đo và cáp truyền tín hiệu trong mỗi lần quan trắc.
Chênh lệch độ lệch ngang giữa các chu kỳ đo chính là giá trị chuyển dịch của
tƣờng vây theo trục A0-A180 và B0-B180 tƣơng ứng của Inclinometer đƣợc tính toán
tự động bằng phần mềm do hãng sản xuất bán kèm theo thiết bị. Ngoài ra phần
mềm còn cung cấp những thông số khác nhƣ tổng chuyển dịch tích lũy từ đáy ống
đến điểm đo có độ sâu bất kỳ, sai số giữa hai chiều đo lệch nhau 1800 của cùng
điểm đo, sai số tích lũy ... và xây dựng 2 biểu đồ chuyển dịch theo trục A0-A180 và
B0-B180 của mỗi lần quan trắc từ các số liệu này.
3.3.4.3. Xử lý số liệu và lập báo cáo kết quả quan trắc
Kết quả quan trắc chuyển dịch ngang đƣợc tính toán và in ra bởi phần mềm
chuyên dụng gồm có:
- Báo cáo gồm các cột số liệu của lần đo hiện tại đƣợc so sánh với số liệu của
lần đo gốc.
- Biểu đồ thể hiện sự chuyển dịch của lần đo hiện tại so với lần đo gốc.
3.3.5. Nhận xét quan trắc chuyển dịch ngang tường vây bằng cảm biến
Inclinometer
Phƣơng pháp sử dụng cảm biến Inclinometer để quan trắc chuyển dịch ngang
và có thể cảnh báo sớm đƣợc các biến dạng nguy hiểm của tƣờng vây để có biện pháp
đảm bảo an toàn khi biến dạng chƣa xảy ra hoặc mới bắt đầu, nhƣ vậy việc xử lý sẽ
đơn giản và đỡ tốn kém hơn. Tuy nhiên phƣơng pháp này cũng có nhƣợc điểm là chỉ
xác định đƣợc chuyển dịch tƣơng đối của tƣờng vây ở các độ sâu khác nhau so với một
điểm nằm ở dƣới sâu không thể tiếp cận đƣợc ở dƣới đáy của ống dẫn hƣớng. Trong
trƣờng hợp điểm đáy ống dẫn hƣớng không ổn định thì giá trị quan trắc thu đƣợc
không phản ánh chính xác mức độ chuyển dịch của tƣờng vây. Vì vậy, để xác định
chính xác độ chuyển dịch ngang của tƣờng vây, ngoài đo chuyển dịch ngang bằng cảm
biến Inclinometer cần thiết phải kết hợp với phƣơng pháp trắc địa.

65
3.4. GIẢI PHÁP QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY BẰNG
PHƢƠNG PHÁP TRẮC ĐỊA KẾT HỢP VỚI PHƢƠNG PHÁP SỬ DỤNG
CẢM BIẾN
Nhƣ đã trình bày ở trên, phƣơng pháp trắc địa có ƣu điểm là cung cấp độ
chính xác cao và cho giá trị chuyển dịch tuyệt đối vì chuyển dịch của các điểm quan
trắc đƣợc xác định trong hệ thống mốc khống chế cơ sở ổn định, tuy nhiên một
nhƣợc điểm rất lớn là phƣơng pháp trắc địa thƣờng chỉ phát hiện đƣợc chuyển dịch
của đỉnh tƣờng vây.
Phƣơng pháp sử dụng cảm biến Inclinometer
. Tuy nhiên
phƣơng pháp này cũng có nhƣợc điểm là chỉ xác định đƣợc chuyển dịch tƣơng đối
của tƣờng vây ở các độ sâu khác nhau so với một điểm nằm ở dƣới sâu không thể
tiếp cận đƣợc ở dƣới đáy của tƣờng vây. Trong trƣờng hợp điểm nằm ở dƣới sâu
không ổn định thì giá trị quan trắc thu đƣợc không phản ánh chính xác mức độ
chuyển dịch của tƣờng vây.
Để khắc phục nhƣợc điểm của hai phƣơng pháp này, trong luận án chúng tôi
đề xuất sử dụng kết hợp hai phƣơng pháp với nhau để quan trắc chuyển dịch ngang
của tƣờng vây nhà cao tầng :
- Inclinometer
(theo lý lịch của thiết bị đo Inclinometer do nhà sản xuất cung cấp, khi
chiều dài của ống dẫn hƣớng là 25m thì sai số tích lũy tính cho điểm miệng ống đo
chuyển dịch ngang bằng Inclinometer theo 1 trục là 6mm. Do vậy, có thể thấy rằng
phƣơng pháp trắc địa có độ chính xác cao hơn hẳn phƣơng pháp Inclinometer).
- Inclinometer
Inclinometer
.
Trong các trƣờng hợp trên, đáy ống dẫn hƣớng đƣợc coi là ổn định khi tƣờng
vây đƣợc thi công tới độ sâu ngậm vào tầng đá gốc (hoặc tầng cuội sỏi), trƣờng hợp
ngƣợc lại thì đáy ống dẫn hƣớng đƣợc coi là không ổn định.

66
Quá trình kết hợp phƣơng pháp trắc địa và phƣơng pháp Inclinometer để
quan trắc chuyển dịch ngang tƣờng vây nhà cao tầng đƣợc thực hiện nhƣ sau:
3.4.1. Trường hợp đáy ống dẫn hướng được gắn vào lớp đất đá ổn định
Khi đáy ống dẫn hƣớng đã đƣợc gắn vào lớp đất đá ổn định, v
hợp số liệu đo trắc địa với kết quả đo bằng Inclinometer nhằm
đƣợc thực
hiện theo phƣơng án đo nhƣ sau:
- Thiết kế một nắp đậy trên miệng ống đo Inclinometer và có kẻ các trục tọa độ
vuông góc (hình 3.26). Dùng thƣớc để đo khoảng cách từ tâm của nắp đậy đến các
điểm đánh dấu trên các trục (các điểm A, B, C, D) với độ chính xác tới ±0.1mm. Trục
A-B trùng với trục A0-A180 và trục C-D trùng với trục B0-B180 của ống dẫn hƣớng.
- Quá trình quan trắc đƣợc thực hiện nhƣ sau: Trong mỗi chu kỳ ngoài việc
đo chuyển dịch ngang theo chiều sâu bằng Inclinometer thì tâm miệng ống dẫn
hƣớng còn đƣợc xác định chuyển dịch bằng phƣơng pháp trắc địa. Nhƣ vậy, tâm
miệng ống dẫn hƣớng (O) sẽ có 2 đại lƣợng chuyển dịch. Chuyển dịch đo bằng trắc
địa T§
(o)
Xq ,
T§
(o)
Yq và chuyển dịch đo bằng Inclinometer
ICL
(o)
Xq ,
ICL
(o)
Yq trong hệ trục tọa độ
trắc địa và hệ trục tọa độ Inclinometer (hình 3.27).
3.26
Hình 3.27. Hệ tọa độ đo chuyển dịch
Để xác định các thông số chuyển dịch đặc trƣng cho chuyển dịch của tƣờng
vây cần chuyển đổi các thông số đo chuyển dịch của 2 hệ trên về một hệ tọa độ
thống nhất. Trong quan trắc chuyển dịch ngang tƣờng vây chuyển dịch đƣợc quan
XICL
YTĐ
XTĐ
T §Yq
T §Xq
ICLYq
ICLXq
O
α
YICL
q

67
tâm nhất là chuyển dịch theo hƣớng vuông góc với tƣờng vây. Phƣơng pháp
Inclinometer trục A đƣợc bố trí vuông góc với tƣờng vây. Do vậy, để thuận tiện
trong quá trình tính toán thì cần tính chuyển tọa độ tâm miệng ống dẫn hƣớng trong
hệ tọa độ trắc địa về hệ tọa độ Inclinometer.
Từ hình (3.27) xác định đƣợc công thức chuyển đổi giữa hai hệ tọa độ (từ hệ tọa độ
trắc địa về hệ tọa độ Inclinometer) đối với điểm tâm miệng ống dẫn hƣớng theo công thức:
T § ICL T § T §
T § ICL T § T §
(o) (o) (o)
X X Y
(o) (o) (o)
Y X Y
q q .cos - q .sin
q q .sin q .cos (3.33)
Trong đó: T§
(o)
Xq ,
T§
(o)
Yq - chuyển dịch điểm miệng ống (điểm O) đo bằng trắc địa
trong hệ tọa độ trắc địa; T§-ICL
(o)
Xq ,
T§-ICL
(o)
Yq - chuyển dịch điểm miệng ống đo bằng trắc
địa trong hệ tọa độ Inclinometer; là góc xoay giữa 2 hệ trục tọa độ Inclinometer
và trắc địa (hình 3.27) có thể đƣợc xác định nhƣ sau:
Khi kết hợp phương pháp trắc địa và Inclinometer mạng lưới quan trắc
thường được thiết kế dưới dạng lưới đo góc-cạnh kết hợp hoặc dưới dạng đồ hình
hướng chuẩn và đồ hình giao hội như ở mục 3.2. Để xác định góc xoay trong mỗi
chu kỳ quan trắc tiến hành đo góc nhỏ của tam giác tạo bởi điểm đặt máy, tâm
miếng ống dẫn hướng và 1 trong 4 điểm A, B, C, D để tính phương vị của 1 trong 2
trục của hệ tọa độ Inclinometer trong hệ tọa độ trắc địa sau đó tính góc . Mặt
khác, trong quan trắc chuyển dịch ngang tường vây bằng Inclinometer thường quy
ước trục A (trục XICL) vuông góc với tường vây nên một cách tương đối có thể dựa
vào bản vẽ để xác định ( là góc hợp bởi giữa trục XICL và trục XTĐ – hình 3.27).
Nhƣ vậy, tại điểm miệng ống có hai giá trị đo chuyển dịch đƣợc đo bằng hai
loại thiết bị có độ chính xác khác nhau. Có thể thấy rằng đo chuyển dịch của điểm
miệng ống bằng phƣơng pháp trắc địa có độ chính xác cao nên có thể coi đây là giá
trị thực của chuyển dịch và giá trị chênh lệch giữa hai phƣơng pháp đƣợc coi là sai
số khép của đo chuyển dịch bằng Inclinometer. Giá trị sai số khép theo các trục tọa
độ đƣợc tính theo các công thức:
ICL T §-ICL
ICL T §-ICL
(o) (o) (o)
X X X
(o) (o) (o)
Y Y Y
q - q
q - q (3.34)
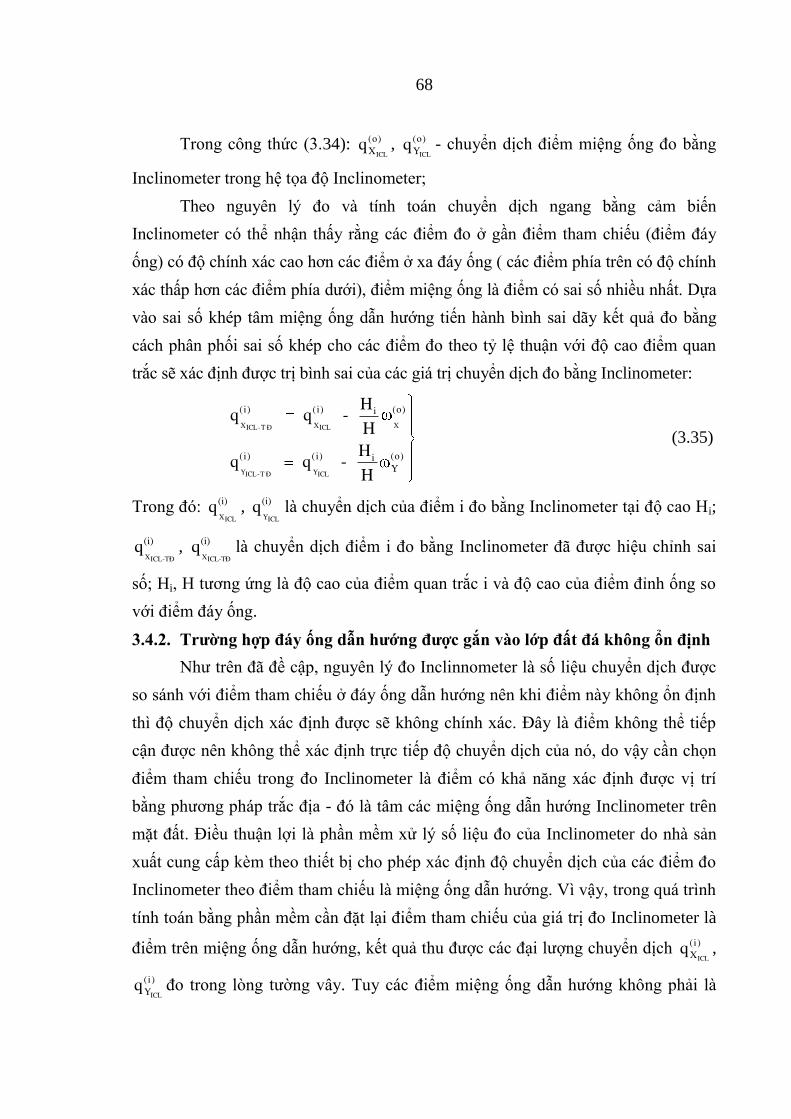
68
Trong công thức (3.34): ICL
(o)
Xq ,
ICL
(o)
Yq - chuyển dịch điểm miệng ống đo bằng
Inclinometer trong hệ tọa độ Inclinometer;
Theo nguyên lý đo và tính toán chuyển dịch ngang bằng cảm biến
Inclinometer có thể nhận thấy rằng các điểm đo ở gần điểm tham chiếu (điểm đáy
ống) có độ chính xác cao hơn các điểm ở xa đáy ống ( các điểm phía trên có độ chính
xác thấp hơn các điểm phía dƣới), điểm miệng ống là điểm có sai số nhiều nhất. Dựa
vào sai số khép tâm miệng ống dẫn hƣớng tiến hành bình sai dãy kết quả đo bằng
cách phân phối sai số khép cho các điểm đo theo tỷ lệ thuận với độ cao điểm quan
trắc sẽ xác định đƣợc trị bình sai của các giá trị chuyển dịch đo bằng Inclinometer:
X X XICL-T § ICL
Y YICL-T § ICL
(i) (i) (o)i
(i) (i) (o)iY
Hq q -
H
Hq q -
H
(3.35)
Trong đó: XICL
(i)q , YICL
(i)q là chuyển dịch của điểm i đo bằng Inclinometer tại độ cao Hi;
XICL-T§
(i)q ,
XICL-T§
(i)q là chuyển dịch điểm i đo bằng Inclinometer đã đƣợc hiệu chỉnh sai
số; Hi, H tƣơng ứng là độ cao của điểm quan trắc i và độ cao của điểm đỉnh ống so
với điểm đáy ống.
3.4.2. Trường hợp đáy ống dẫn hướng được gắn vào lớp đất đá không ổn định
Nhƣ trên đã đề cập, nguyên lý đo Inclinnometer là số liệu chuyển dịch đƣợc
so sánh với điểm tham chiếu ở đáy ống dẫn hƣớng nên khi điểm này không ổn định
thì độ chuyển dịch xác định đƣợc sẽ không chính xác. Đây là điểm không thể tiếp
cận đƣợc nên không thể xác định trực tiếp độ chuyển dịch của nó, do vậy cần chọn
điểm tham chiếu trong đo Inclinometer là điểm có khả năng xác định đƣợc vị trí
bằng phƣơng pháp trắc địa - đó là tâm các miệng ống dẫn hƣớng Inclinometer trên
mặt đất. Điều thuận lợi là phần mềm xử lý số liệu đo của Inclinometer do nhà sản
xuất cung cấp kèm theo thiết bị cho phép xác định độ chuyển dịch của các điểm đo
Inclinometer theo điểm tham chiếu là miệng ống dẫn hƣớng. Vì vậy, trong quá trình
tính toán bằng phần mềm cần đặt lại điểm tham chiếu của giá trị đo Inclinometer là
điểm trên miệng ống dẫn hƣớng, kết quả thu đƣợc các đại lƣợng chuyển dịch ICL
(i )
Xq ,
ICL
(i )
Yq đo trong lòng tƣờng vây. Tuy các điểm miệng ống dẫn hƣớng không phải là

69
các điểm ổn định, nhƣng độ chuyển dịch của nó có thể xác định đƣợc bằng phƣơng
pháp trắc địa, cụ thể là bằng máy toàn đạc điện tử. Nhƣ vậy, trong mỗi chu kỳ quan
trắc, tâm của miệng ống dẫn hƣớng Inclinometer cần phải định vị chính xác trong
hệ tọa độ trắc địa, và chênh lệch tọa độ giữa các chu kỳ chính là giá trị chuyển dịch
T§
(o)
Xq ,
T§
(o)
Yq của tâm miệng ống dẫn hƣớng trên mặt đất.
Tính chuyển giá trị chuyển dịch của miệng ống dẫn hƣớng đo bằng trắc địa
về tọa độ Inclinometer theo công thức (3.33) đƣợc độ chuyển dịch của miệng ống
T§-ICL
(o)
Xq ,
T§-ICL
(o)
Yq .
Vì xác
T§-ICL
(o)
Xq ,
T§-ICL
(o)
Yq là giá trị thực
không chứa sai số, sử dụng giá trị này để cải chính cho từng trị đo Inclinometer
ICL
(i )
Xq ,
ICL
(i )
Yq trong mỗi ống dẫn hƣớng Inclinometer tƣơng ứng theo công thức sau:
X X T §-ICLICL-T § ICL
Y Y T §-ICLICL-T § ICL
(i) (i) (o)
X
(i) (i) (o)
X
q q q
q q q (3.36)
3.4.3. Nhận xét phương pháp quan trắc chuyển dịch ngang tường vây bằng
phương pháp trắc địa kết hợp phương pháp sử dụng cảm biến
Từ quy trình đo đạc và tính toán nêu trên, có thể nhận thấy rằng: giải pháp kết
hợp phƣơng pháp trắc địa và phƣơng pháp sử dụng cảm biến Inclinometer để quan trắc
chuyển dịch ngang tƣờng vây nhà cao tầng có ý nghĩa nhƣ sau:
- Nâng cao độ chính xác đo chuyển dịch ngang của các điểm đo nằm sâu trong
lòng tƣờng vây (trong trƣờng hợp đáy ống dẫn hƣớng đƣợc gắn vào lớp đất đá ổn định).
- Giải pháp kết hợp cho phép chúng ta lấy điểm miệng ống làm chuẩn để xác
định giá trị chuyển dịch chính xác của các điểm đo trong lòng tƣờng vây.
Nhƣ vậy có thể nhận thấy giải pháp kết hợp phƣơng pháp trắc địa với
phƣơng pháp cảm biến nêu trên cho phép nâng cao hiệu quả công tác quan trắc
chuyển dịch ngang tƣờng vây nhà cao tầng. Trong giải pháp kết hợp này đáy ống
dẫn hƣớng đo bằng Inclinometer cũng không cần neo vào lớp đất đá ổn định. Tuy
nhiên trong quan trắc tƣờng vây, để có số liệu từ đáy lên đến đỉnh của tƣờng vây thì
ống dẫn hƣớng cần lắp đặt bằng chiều sâu của tƣờng vây.

70
Chương 4
PHÂN TÍCH BIẾN DẠNG NỀN MÓNG VÀ TẦNG HẦM CÔNG TRÌNH
NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG XÂY DỰNG
4.1. NGUYÊN TẮC THÀNH LẬP MÔ HÌNH CHUYỂN DỊCH CÔNG TRÌNH
THEO SỐ LIỆU QUAN TRẮC
Về mặt hình thức, mô hình chuyển dịch công trình có thể đƣợc mô tả thông
qua các nhóm yếu tố sau:
1- Các yếu tố ảnh hƣởng đến tính ổn định của công trình, gồm có:
- Các yếu tố thuộc nhóm nguyên nhân chủ đạo gây nên chuyển dịch và biến
dạng công trình (x1, x2, ... xn), ví dụ: mức tăng tải trọng công trình, sự thay đổi mực
nƣớc ngầm...
- Sự thay đổi của các điều kiện ngoại cảnh do tác động của con ngƣời (u1, u2,
... um), những yếu tố này là có thể kiểm soát và điều khiển đƣợc.
- Các tác động nhiễu (z1, z2, ... zk), con ngƣời không kiểm soát đƣợc.
2- Tham số đầu ra: là các giá trị định lƣợng (Y), đặc trƣng cho mức độ
chuyển dịch và biến dạng công trình. Trong thực tế quan trắc, các tham số đầu ra
(Y) còn chịu ảnh hƣởng của sai số đo (w).
Sơ đồ mô tả mối quan hệ tƣơng hỗ giữa các yếu tố trong quan trắc chuyển
dịch biến dạng công trình đƣợc đƣa ra trong hình 4.1 [17].
Hình 4.1. Mô hình đối tượng quan trắc
Khi tổng hợp chuyển dịch công trình ở nhiều chu kỳ chúng ta cần trả lời các
câu hỏi sau:
1- Xu hƣớng chuyển dịch chung của công trình trong không gian.
Đối tượng
quan trắc Y
x1
x2
xn
u1 u2 um
z2 z1 zk

71
2- Xu hƣớng chuyển dịch chung của công trình theo thời gian.
3- Mức độ phụ thuộc độ chuyển dịch công trình vào một số yếu tố ngoại cảnh.
Để giải quyết các vấn đề nêu trên cần phải xây dựng mô hình chuyển dịch
của công trình mà thực chất mô tả quá trình chuyển dịch công trình bằng một số
hàm toán học nào đó. Về nguyên tắc mô hình chuyển dịch công trình đƣợc thể hiện
thông qua hàm số:
= F1(x) + F2(u) + F3(z) + w] (4.1)
Trong đó:
F1(x)-thành phần ảnh hƣởng của một nhóm yếu tố chủ đạo gây nên
chuyển dịch công trình. Trong giai đoạn thi công xây dựng, yếu tố chủ đạo là tải
trọng công trình, ở giai đoạn đầu vận hành, yếu tố chủ đạo là thời gian, đến thời
kỳ sau yếu tố chính có thể là sự thay đổi mực nƣớc ngầm (đối với nhà và công
trình dân dụng)...
F2(u)- ảnh hƣởng của các yếu tố có thể kiểm soát đƣợc nhƣng không thể thay
đổi chúng (ví dụ điều kiện môi trƣờng).
F3(z)- ảnh hƣởng của các yếu tố tức thời, không thể xác định trƣớc mức độ
tác dụng của chúng tới công trình (gió, bão, động đất...).
w- ảnh hƣởng sai số đo đạc.
Thông thƣờng chỉ cần xây dựng mô hình với các yếu tố chủ đạo là đủ.
4.2. MÔ HÌNH LÚN NỀN MÓNG VÀ CHUYỂN DỊCH TƢỜNG VÂY
TRONG KHÔNG GIAN
4.2.1. Mô hình lún nền móng công trình nhà cao tầng trong giai đoạn thi công
móng và tầng hầm
4.2.1.1. Mô hình lún của kết cấu móng cứng
Đối với kết cấu móng cứng (móng băng, móng bè, móng cọc,...) có dạng
vùng, các điểm quan trắc phân bố không trên cùng một đƣờng thẳng mà trên toàn
bộ diện tích móng công trình, khi đó có khái niệm về " bề mặt lún" của móng công
trình ở mỗi thời điểm (chu kỳ) nhƣ sau:
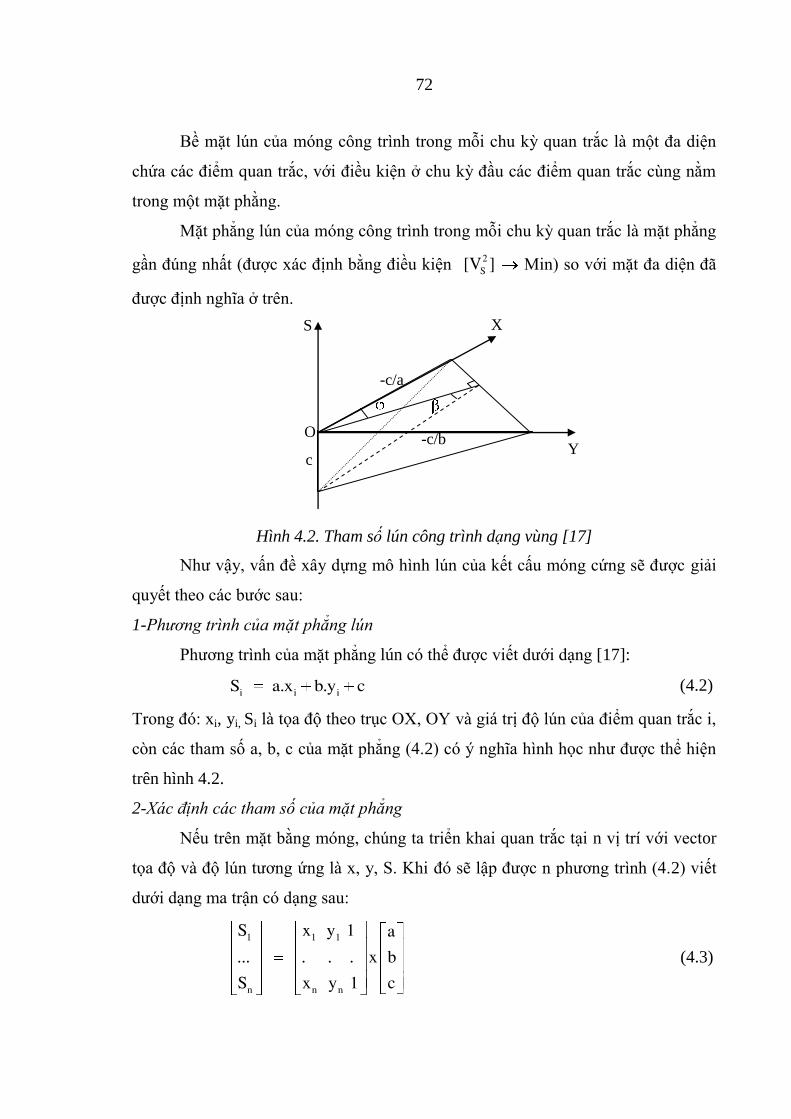
72
Bề mặt lún của móng công trình trong mỗi chu kỳ quan trắc là một đa diện
chứa các điểm quan trắc, với điều kiện ở chu kỳ đầu các điểm quan trắc cùng nằm
trong một mặt phằng.
Mặt phẳng lún của móng công trình trong mỗi chu kỳ quan trắc là mặt phẳng
gần đúng nhất (đƣợc xác định bằng điều kiện 2
S[V ] Min) so với mặt đa diện đã
đƣợc định nghĩa ở trên.
Hình 4.2. Tham số lún công trình dạng vùng [17]
Nhƣ vậy, vấn đề xây dựng mô hình lún của kết cấu móng cứng sẽ đƣợc giải
quyết theo các bƣớc sau:
1-Phương trình của mặt phẳng lún
Phƣơng trình của mặt phẳng lún có thể đƣợc viết dƣới dạng [17]:
i i iS a.x b.y c (4.2)
Trong đó: xi, yi, Si là tọa độ theo trục OX, OY và giá trị độ lún của điểm quan trắc i,
còn các tham số a, b, c của mặt phẳng (4.2) có ý nghĩa hình học nhƣ đƣợc thể hiện
trên hình 4.2.
2-Xác định các tham số của mặt phẳng
Nếu trên mặt bằng móng, chúng ta triển khai quan trắc tại n vị trí với vector
tọa độ và độ lún tƣơng ứng là x, y, S. Khi đó sẽ lập đƣợc n phƣơng trình (4.2) viết
dƣới dạng ma trận có dạng sau:
1 1 1
n n n
S x y 1 a
... . . . x b
S x y 1 c
(4.3)
S X
Y O
-c/a
-c/b
c

73
Để xác định đƣợc 3 tham số (a, b, c) cần có ít nhất 3 phƣơng trình dạng (4.3),
tức là cần phải có số liệu 3 điểm quan trắc. Khi số điểm quan trắc n >3, bài toán sẽ
đƣợc giải theo nguyên lý số bình phƣơng nhỏ nhất. Ký hiệu:
1
2
n
S1 1 1
S2 2 2
n n n S
VS x y 1a
VS x y 1 S = ; A = ; z = b ; V =
... . . . ...c
S x y 1 V
Khi đó hệ phƣơng trình số hiệu chỉnh viết dƣới dạng ma trận là:
SV A.z S (4.4)
Áp dụng nguyên lý số bình phƣơng nhỏ nhất, sẽ xác định đƣợc vector z theo
công thức:
1T Tz A A .A S (4.5)
Sai số mô hình (mMH) đƣợc xác định theo công thức sau:
2
MH
[V ]m
n k (4.6)
Trong công thức (4.6): n - số điểm quan trắc; k - số lƣợng tham số của mô hình.
3-Ý nghĩa các tham số
Dựa vào các tham số của mặt phẳng, tính đƣợc hệ tham số lún tổng quát của
mặt phẳng lún theo công thức:
- Độ lún tại gốc tọa độ (thƣờng là điểm trọng tâm công trình):
TT
S c (4.7)
- Góc nghiêng lớn nhất của mặt phẳng lún:
2 2 Arctg a b (4.8)
- Hƣớng nghiêng lớn nhất (tính từ trục OX theo chiều kim đồng hồ):
b Arctg
a (4.9)
4-Trường hợp đặc biệt
Trong trƣờng hợp đặc biệt các điểm quan trắc phân bố trên một đƣờng thẳng

74
(hoặc khi cần xây dựng mô hình lún theo trục), khi đó biểu diễn độ lún thông qua
phƣơng trình đƣờng thẳng. Phƣơng trình đƣờng thẳng có dạng sau:
i iS a.x b (4.10)
Trong đó: Si - độ lún của điểm i (i=1÷n); xi - là tọa độ theo hƣớng ngang của điểm
quan trắc (i=1÷n).
Khi số điểm quan trắc lớn hơn 2 điểm thì quá trình xác định các tham số của
đƣờng thẳng đƣợc thực hiện theo nguyên lý số bình phƣơng nhỏ nhất. Sai số mô
hình đƣợc xác định theo công thức (4.6).
Ý nghĩa của các tham số: b- độ lún của công trình tại gốc tọa độ; a = tg ( -
Góc nghiêng của đƣờng thẳng so với phƣơng nằm ngang).
Phƣơng trình đƣờng thẳng thƣờng đƣợc sử dụng để xây dựng mô hình lún
theo trục của móng.
4.2.1.2. Mô hình lún nền đất lân cận hố móng
Trong quá trình thi công hố đào để thi công móng và tầng hầm nhà cao tầng.
Các kết quả tính toán và đo đạc cho thấy lún bề mặt đất lân cận hố đào bị lõm
xuống và phễu lún có dạng hình cong. Đối với nền đất yếu phễu lún thƣờng có dạng
nhƣ hình 4.3.
Hình 4.3. Phễu lún nền đất yếu
Từ hình 4.3 dựa vào kết quả quan trắc trong mỗi chu kỳ chúng ta có thể xây
dựng một đƣờng cong để mô tả quá trình lún của nền đất. Trong luận án chúng tôi
sử dụng hàm parabol để mô hình hóa quá trình lún của nền đất trong quá trình thi
công móng và tầng hầm nhà cao tầng. Quá trình xây dựng mô hình lún theo hàm
parabol đƣợc thực hiện nhƣ sau:
Mô hình lún nền đất ở mỗi thời điểm (chu kỳ) có dạng hàm parabol tổng quát:
Nền tốt Nền tốt Nền đất yếu
Phễu lún

75
2 2
i 0 1 i 2 i 3 i 4 i i 5 iS a a x a y a x b x y a y (4.11)
Với n điểm quan trắc thành lập đƣợc n phƣơng trình (4.11) viết dƣới dạng
ma trận có dạng sau:
2 2
1 1 1 1 1 11 0
2 2
2 12 2 2 2 2 2
2 2n 5n n n n n n
1 x y x x y yS a
S a1 x y x x y y x
... .... . . . . .
S a1 x y x x y y
(4.12)
Để xác định đƣợc 6 tham số (a0, a1, a2, a3, a4, a5) cần có ít nhất 6 phƣơng
trình dạng (4.11), tức là cần phải có số liệu 6 điểm quan trắc. Khi số điểm quan
trắc n >6, bài toán sẽ đƣợc giải theo nguyên lý số bình phƣơng nhỏ nhất. Khi đó
hệ phƣơng trình số hiệu chỉnh có dạng (4.4) và vector tham số z đƣợc xác định
theo (4.5), sai số mô hình đƣợc xác định theo công thức 4.6.
4.2.2. Mô hình chuyển dịch ngang của tường vây
4.2.2.1. Mô hình chuyển dịch tường vây trong mặt phẳng ngang
Trong trƣờng hợp các điểm quan trắc chuyển dịch ngang tƣờng vây đƣợc bố
trí trên cùng một mặt phẳng nằm ngang. Để xác định các tham số đặc trƣng cho
chuyển dịch chung của toàn bộ tƣờng vây, có thể sử dụng hệ tham số sau:
Quy ƣớc gán cho tƣờng vây một hệ tọa độ đặc trƣng XOY, ở thời điểm t1
tƣờng vây ở vị trí P1 và có hệ tọa độ đặc trƣng là (XOY), đến thời điểm t2 tƣờng vây
ở vị trí P2 và có hệ tọa độ đặc trƣng là (X‟O‟Y‟), nhƣ vậy chuyển dịch chung của
tƣờng vây có thể đƣợc đặc trƣng bằng chuyển dịch giữa 2 hệ tọa độ XOY và
X‟O‟Y‟ nhƣ đƣợc mô tả ở hình 4.4.
Vector chuyển đổi tọa độ giữa hai hệ tọa độ vuông góc phẳng gồm 4 tham số
(aX, aY, , m), khi so sánh vị trí tƣờng vây ở hai thời điểm quan trắc các tham số
nêu trên có ý nghĩa là: aX, aY đặc trƣng cho chuyển dịch tịnh tiến của tƣờng vây ở vị
trí gốc tọa độ theo các hƣớng trục OX, OY tƣơng ứng, đặc trƣng cho góc xoay
của tƣờng vây, m đặc trƣng cho hệ số co dãn kích thƣớc của tƣờng vây.

76
Hình 4.4. Chuyển dịch giữa hai hệ tọa độ
Từ hình 4.4 xác định đƣợc công thức chuyển đổi giữa 2 hệ tọa độ [16]:
X
Y
X' a X.m.cos( ) - Y.m.sin( )
Y' a Y.m.cos( ) X.m.sin( ) (4.13)
Khai triển tuyến tính biểu thức trên với các ẩn số là các tham số chuyển dịch
với giá trị gần đúng của vector tham số o oX Y o o
(a , a , , m ) 0, 0, 0, 1 , có thể thấy
rằng rất nhỏ ( ≈ 0) nên sin( ) ≈ 0, cos( ) ≈ 1 và m ≈ 1, kết quả thu đƣợc [17]:
X
Y
X' a - Y. X. m X
Y' a X. Y. m Y (4.14)
Mặt khác vì: x y
q X’ X, q Y’ Y nên thu đƣợc biểu thức:
X X
Y Y
q a - Y. X. m
q a X. Y. m (4.15)
Để xác định đƣợc 4 tham số X Y
(a , a , , m) cần có ít nhất 4 phƣơng trình
dạng (4.15), tức là phải cần 2 điểm quan trắc. Khi số điểm quan trắc n>2 bài toán sẽ
đƣợc giải theo nguyên lý số bình phƣơng nhỏ nhất. Trong công thức (4.15) nếu coi
X Yq , q là các trị đo, ẩn số là vector tham số
T
X Yz (a , a , , m)
sẽ xác lập đƣợc
phƣơng trình số hiệu chỉnh đối với mỗi điểm quan trắc dƣới dạng:
X
Y
q X X
q Y Y
V a - Y. X. m - q
V a X. Y. m - q (4.16)
Y'
aY
O
P2 ax
X’ X
O’
P1
Y

77
Ký hiệu:
1 1 n n
i i
i
i i
T
1 2 n
T
X Y
X Y X Y
1 0 Y XB
0 1 X Y
A B , B ,...., B
z (a , a , , m)
L - (q , q , ..., q , q )
(4.17)
Quá trình giải bài toán xác định vector tham số z đƣợc thực hiện theo trình tự:
- Lập hệ phƣơng trình số hiệu chỉnh:
V A. Z L (4.18)
- Lập hệ phƣơng trình chuẩn:
T TA A Z A L 0 (4.19)
- Xác định vector tham số chuyển dịch chung của tƣờng vây:
T -1 TZ - (A A) A L (4.20)
Sai số mô hình (mMH) đƣợc xác định theo công thức sau:
2
MH
[V ]m
2n k (4.21)
Trong công thức (4.21): n - số điểm quan trắc; k - số lƣợng tham số của mô hình.
Quá trình xác định vector tham số chuyển dịch của tƣờng vây đƣợc đơn giản
đi rất nhiều khi chọn hệ tọa độ có điểm gốc O trùng với trọng tâm của tƣờng vây.
Khi đó aX, aY là giá trị chuyển dịch của các điểm trọng tâm. Để xác định vector
tham số chuyển dịch chung của tƣờng vây áp dụng các công thức sau [17]:
x
x x0 x
y
y y0 y
y x
02 2
x y
02 2
qa a a
n
qa a a
n
Xq - Yq
X Y
Xq - Yqm m m 1 -
X Y
(4.22)

78
Trong đó:
n n
i ii i 0 i 1 i 1
0 0
i i 0
X YX X - X
; X ; Y n nY Y - Y
(4.23)
Trong trƣờng hợp đặc biệt, đối với tƣờng vây dạng thẳng các điểm quan trắc
bố trí trên cùng một đƣờng thẳng (hoặc khi cần xây dựng mô hình chuyển dịch theo
từng cạnh của tƣờng vây). Khi đó biểu diễn chuyển dịch thông qua phƣơng trình
đƣờng thẳng. Phƣơng trình đƣờng thẳng chuyển dịch có dạng sau:
i iq a.x b
(4.24)
Trong đó: qi - chuyển dịch ngang của điểm i theo hƣớng vuông góc với tƣờng vây
(i=1÷n); xi - là tọa độ theo hƣớng song song với tƣờng vây (i=1÷n).
Khi số điểm quan trắc lớn hơn 2 điểm thì quá trình xác định các tham số của
đƣờng thẳng đƣợc thực hiện theo nguyên lý số bình phƣơng nhỏ nhất. Sai số mô
hình đƣợc tính theo công thức (4.6).
Ý nghĩa của các tham số: a = tg ( - Góc nghiêng của đƣờng thẳng so với
phƣơng nằm ngang); b- chuyển dịch của tƣờng vây tại gốc tọa độ.
4.2.2.2. Mô hình chuyển dịch tường vây trong mặt phẳng đứng
Đối với tƣờng vây đƣợc quan trắc theo chiều sâu, các điểm quan trắc thƣờng
đƣợc phân bố gần trong cùng một mặt phẳng thẳng đứng, khi đó có khái niệm về
"mặt phẳng chuyển dịch" của tƣờng vây ở mỗi thời điểm (chu kỳ) nhƣ sau:
Bề mặt chuyển dịch tƣờng vây trong mỗi chu kỳ quan trắc là một đa diện
chứa các điểm quan trắc, với điều kiện ở chu kỳ đầu các điểm quan trắc cùng nằm
trong một mặt phẳng đứng.
Mặt phẳng chuyển dịch của tƣờng vây trong mỗi chu kỳ quan trắc là mặt
phẳng gần đúng nhất (đƣợc xác định bằng điều kiện 2
q[V ] Min) so với mặt đa
diện đã đƣợc định nghĩa ở trên.

79
Phƣơng trình của mặt phẳng có thể đƣợc viết dƣới dạng [27]:
i i iq aX bH c (4.25)
Trong đó: Xi, Hi, qi là tọa độ theo trục OX, độ cao và giá trị chuyển dịch của
điểm quan trắc i; a, b, c tham số của mặt phẳng.
Nếu trên tƣờng vây, chúng ta triển khai quan trắc tại n vị trí với vector tọa
độ, độ cao và chuyển dịch tƣơng ứng là X, H, q. Khi đó sẽ lập đƣợc hệ phƣơng trình
số hiệu chỉnh:
qV A.Z q (4.26)
Trong đó:
1
2
n
q1 1 1
q2 2 2
n n n q
Vq X H 1a
Vq X H 1 q ; A ; z b ; V
... . . . ...c
q X H 1 V
Áp dụng nguyên lý số bình phƣơng nhỏ nhất, sẽ xác định đƣợc vector tham
số Z theo công thức:
1T TZ A A .A q (4.27)
Trong trƣờng hợp xây dựng mô hình chuyển dịch ngang tƣờng vây trong mặt
phẳng đứng cũng giống nhƣ xây dựng mô hình lún trong mặt phẳng. Sai số mô hình
đƣợc tính theo công thức (4.6), các tham số chuyển dịch tổng quát của mặt phẳng
bao gồm: chuyển dịch của gốc tọa độ, góc nghiêng lớn nhất và hƣớng nghiêng lớn
nhất đƣợc tính theo công thức (4.7), (4.8) và (4.9).
Khi xây dựng mô hình chuyển dịch trong không gian sẽ cho phép nội suy
chuyển dịch ở các vị trí khác nhau của công trình.
4.2.3. Ứng dụng phân tích phương sai để đánh giá biến dạng công trình
Khi xây dựng mô hình chuyển dịch công trình trong không gian thì mô hình
sử dụng đã đƣợc biết trƣớc. Do vậy, trong trƣờng hợp này có thể ứng dụng phân
tích phƣơng sai để đánh giá mức độ biến dạng công trình.

80
Trong bài toán xác định tham số của mô hình biến dạng công trình, sai số mô
hình tính theo công thức (4.6) và (4.21) là tổng hợp của 2 yếu tố: sai số đo và độ
biến dạng thực tế của công trình, nếu công trình không biến dạng thì sai số mô hình
chỉ do sai số đo gây nên và trong trƣờng hợp này với xác xuất đƣợc chọn, giá trị sai
số mô hình (mMH) không thể vƣợt quá sai số giới hạn.
Với ký hiệu m1, m2, m3,...mn là sai số trung phƣơng độ chuyển dịch của các
điểm quan trắc, tiến hành tính đại lƣợng:
2 2 2
1 2 n0
m m ... mm
n (4.28)
Có thể coi m0 là sai số trung phƣơng trung bình độ chuyển dịch của các điểm
quan trắc, nếu công trình không bị biến dạng thì:
0 MHm m (4.29)
Để kiểm tra giả thiết (4.29) cần áp dụng tiêu chuẩn kiểm định Fisher, bằng
cách lập tỉ số:
MH
0
2
2
mF
m (4.30)
với bậc tự do bằng (n-k) và (n), trong đó: n là số lƣợng trị đo tham gia xây dựng mô
hình, k là số lƣợng tham số của mô hình.
So sánh giá trị F với giá trị tới hạn Fgh tra đƣợc từ bảng phân phối Fisher. Nếu
ghF F thì có thể coi mMH và m0 có cùng độ chính xác và kết luận rằng công trình
không bị biến dạng. Trong trƣờng hợp ngƣợc lại, nếu ghF F thì chứng tỏ rằng công
trình có bị biến dạng.
4.3. MÔ HÌNH LÚN VÀ CHUYỂN DỊCH NỀN MÓNG NHÀ CAO TẦNG
THEO THỜI GIAN
4.3.1. Cơ sở lý thuyết dự báo chuyển dịch công trình theo số liệu quan trắc
Giả sử mô hình chuyển dịch công trình theo thời gian đƣợc thể hiện thông
qua hàm số ở dạng tổng quát:
q f(t) (4.31)
Giả sử hàm số (4.31) đƣợc triển khai tuyến tính với vector tham số Z gồm k

81
phần tử:
T
1 2 kZ (z , z ,..., z ) (4.32)
Bài toán đặt ra là, cần dựa vào chuỗi kết quả đo chuyển dịch trong n chu kỳ
để xác định vector tham số của hàm (4.32). Ký hiệu dãy thời gian và giá trị chuyển
dịch thu đƣợc trong các chu kỳ quan trắc bằng các vector T
1 2 nT (t , t ,..., t ) ;
T
1 2 nq (q , q , ..., q ) . Khi số chu kỳ quan trắc lớn hơn số luợng tham số (n > k),
bài toán đƣợc giải theo nguyên lý số bình phƣơng nhỏ nhất theo trình tự sau:
Triển khai tuyến tính biểu thức (4.31) theo các biến zi với vector tham số gần
đúng 0 0 0 T
0 1 2 kZ (z , z ,..., z ) , xác định đƣợc:
0
i i1 1 i2 2 ik k iq a dz a dz ... a dz q ; (i =1÷n) (4.33)
với:
0 0 0 0
i 1 1 2 2 k kq a z a z ... a z (4.34)
Coi vector chuyển dịch q là vector trị đo, chuyển sang hệ phƣơng trình số
hiệu chỉnh sẽ có:
1 11 12 1k 1 1
2 21 22 2k 2 2
n n1 n2 nk k n
v a a ... a dz l
v a a ... a dz lx
... ... ... ... ... ... ...
v a a ,,, a dz l
(4.35)
Hoặc viết dƣới dạng ma trận:
V A.dZ L (4.36)
Trong đó: vector số hạng tự do 0L q - q .
Theo nguyên lý số bình phƣơng nhỏ nhất ([v2] = Min) xác định đƣợc vector
ẩn số và từ đó tính vector tham số của mô hình:
T -1 T
0
dZ - (A A) .A L
Z Z dZ (4.37)
Sai số mô hình (mMH) đƣợc xác định theo công thức:
2
MH
[v ]m
n - k (4.38)

82
Trong công thức (4.38): n - số chu kỳ quan trắc tham gia xây dựng mô hình; k - số
lƣợng tham số của mô hình.
Hàm số (4.31) với các tham số tính đƣợc là biểu thức thể hiện mô hình
chuyển dịch theo thời gian. Mô hình chuyển dịch theo thời gian cho phép thực hiện
tính toán, dự báo chuyển dịch công trình trong thời gian tƣơng lai.
4.3.2. Ứng dụng phân tích phương sai để đánh giá mức độ tin cậy của mô hình
Trong trƣờng hợp xây dựng mô hình chuyển dịch theo thời gian, mô hình lựa
chọn là mô hình dự đoán, chƣa biết trƣớc đƣợc thực tế mô hình nhƣ thế nào. Do vậy,
trong trƣờng hợp này có thể sử dụng phân tích phƣơng sai để đánh giá mức độ tin cậy
của mô hình.
Khi xây dựng mô hình chuyển dịch theo thời gian, sai số mô hình có thể do sai
số đo gây nên và làm cho sự chuyển dịch không tuân thủ chặt chẽ theo mô hình ấy.
Chọn mô hình đúng gần sát thực tế thì sai số mô hình tƣơng đƣơng sai số đo. Khi đó
có thể sử dụng phân tích phƣơng sai để đánh giá mức độ tin cậy của mô hình thông
qua tiêu chuẩn Fisher. Với ký hiệu m1, m2, m3,...mn là sai số trung phƣơng độ chuyển
dịch của điểm quan trắc ở các chu kỳ đo, tiến hành tính đại lƣợng:
2 2 2
1 2 n0
m m ... mm
n (4.39)
Để đánh giá mức độ tin cậy của mô hình cần áp dụng tiêu chuẩn kiểm định
Fisher, bằng cách lập tỷ số:
MH
0
2
2
mF
m (4.40)
với bậc tự do là (n-k) và (n). Trong đó: n là số chu kỳ quan trắc (không kể chu kỳ
quan trắc đầu tiên); k là số lƣợng tham số của mô hình.
So sánh giá trị F với giá trị tới hạn Fgh tra đƣợc từ bảng phân phối Fisher.
Nếu F ≤ Fgh thì mô hình lựa chọn là phù hợp.
4.3.3. Một số mô hình lún và chuyển dịch nền móng nhà cao tầng theo thời gian
4.3.3.1. Mô hình hàm số mũ
Theo lý thuyết cơ học đất nền móng thì độ lún công trình ở thời điểm t có thể
đƣợc tính theo công thức [17]:

83
t TP
.tS S (1 e ) (4.41)
Trong đó: Stp - độ lún toàn phần của công trình
- hệ số nén tƣơng đối của nền.
Trong giai đoạn thiết kế, độ lún công trình đƣợc tính toán dựa theo các tham số
thực nghiệm TP
S và . Đến giai đoạn thi công hoặc vận hành công trình, kết quả đo lún
đƣợc sử dụng để xác định các tham số TP
S , và dựa vào công thức (4.41) để tính (dự báo)
độ lún ở thời điểm bất kỳ. Nếu đã thực hiện n chu kỳ quan trắc lún (n > 2) thì hai tham số
trên đƣợc xác định theo phƣơng pháp bình phƣơng nhỏ nhất.
4.3.3.2. Mô hình hàm đa thức
Khi sử dụng đa thức, chuyển dịch công trình đƣợc thể hiện dƣới dạng [17]: 2 k
t 0 1 2 kq a a .t a .t ... a .t (4.42)
Trong đó: t
q - độ chuyển dịch công trình ở thời điểm t, còn 0 1 2 k
a , a , a ,....a là các hệ
số của đa thức.
Trong hàm đa thức việc chọn bậc đa thức k có thể thực hiện theo nguyên tắc:
“Đa thức được chọn là đa thức có số bậc nhỏ nhất mà sai số của mô hình đó tương
đương với sai số đo chuyển dịch”.
Hàm đa thức có tính tổng quát và có thể áp dụng với bất kỳ công trình nào.
4.4. ĐÁNH GIÁ ẢNH HƢỞNG CỦA CÁC YẾU TỐ GÂY NÊN CHUYỂN DỊCH
BIẾN DẠNG CÔNG TRÌNH
Chuyển dịch của công trình phụ thuộc trƣớc hết vào tính chất cơ lý của đất nền và
một số yếu tố ngẫu nhiên khác nhƣ độ ẩm, mực nƣớc ngầm ... Tác động tổng hợp của
các yếu tố đã nêu có thể làm thay đổi quy luật chuyển dịch công trình theo thời gian.
Một trong những nhiệm vụ quan trọng của công tác quan trắc biến dạng công
trình là đánh giá mức độ phụ thuộc giữa các yếu tố ngẫu nhiên với chuyển dịch
công trình. Các vấn đề đƣợc đặt ra là:
1- Đánh giá mức độ phụ thuộc của chuyển dịch với một hoặc một số yếu tố
có thể ảnh hƣởng đến độ chuyển dịch đó (tức là chúng ta phải xác định có tồn tại sự
phụ thuộc giữa chúng không? Mức độ phụ thuộc nhƣ thế nào nếu chúng tồn tại?).

84
2- Xác định biểu thức của hàm số mô tả mối quan hệ phụ thuộc nêu trên giữa
các biến ngẫu nhiên.
có thể
với quá trình tính toán nhƣ sau [17]:
4.4.1. Xác định hệ số tương quan
Trƣớc hết chúng ta xem xét việc kiểm tra mối tƣơng quan tuyến tính giữa hai
đại lƣợng ngẫu nhiên X và Y.
Xi, Yi i= 1,n
XY
r
:
i
XY2 22 2 2 2
i i
(Xi - X)(Yi - Y)
XY - X Ynr(Xi - X) (Yi - Y) X - (X) Y - (Y)
n n
(4.43)
T :
i
Xi
X = n
; i
Yi
Y = n
; i
XiYi
XY = n
(4.44)
2
2i
Xi
X = n
;
2
2i
Yi
Y = n
(4.45)
Hệ số tƣơng quan tính theo công thức (4.43) là chỉ số biểu thị cho sự tƣơng
quan giữa hai đại lƣợng ngẫu nhiên X và Y. Hệ số rXY biến thiên từ -1 đến +1, nếu
XYr bằng +1 hoặc -1 thì giữa X và Y tồn tại chính xác mối liên hệ tuyến tính, tức
Y= aX+ b hoặc X= cY+ d. Nếu giá trị rXY càng gần +1 hoặc -1 thì giữa X và Y tồn
tại sự tƣơng quan mạnh và ngƣợc lại, nếu giá trị hệ số XY
r càng gần 0 thì càng ít có
sự liên quan giữa X và Y với nhau.
Để đánh giá độ tin cậy của hệ số tƣơng quan tuỳ thuộc vào số lần quan trắc
mà sử dụng các công thức sau:

85
1- (n ≥ 50)
:
2
r
1- r
n (4.46)
:
rr 3 (4.47)
2- Khi n < 50
Khi n < 50 sử dụng hàm đặc biệt phân bố theo quy luật chuẩn, đƣợc gọi là
tiêu chuẩn Fisher.
1 1+rZ = ln
2 1-r (4.48)
:
ζZ
1
n-3 (4.49)
Trong trƣờng hợp này mối quan hệ tƣơng quan giữa X và Y cũng đƣợc thiết
lập với điều kiện giống nhƣ công thức (4.47).
4.4.2. Xây dựng hàm hồi quy
Khi quan hệ tƣơng quan giữa 2 đại lƣợng X và Y đã đƣợc xác lập, sẽ sử dụng
hàm hồi quy tuyến tính đơn để mô tả mối quan hệ đó, hàm hồi quy có dạng.
Y a.X b (4.50)
(4.50
: i i 1 1 2 2 n n
(Y ,X ) = (Y ,X ),(Y ,X ),...,(Y ,X )
:
n2
i i
i 1
(Y - a.X - b) min (4.51)
nh:

86
2X .a X .b - XY 0
X .a n.b - Y 0 (4.52)
(4.52 XY
. b trong (4.52 :
22
XY2
2
X - (X)a r .
Y - (Y)
b Y - a.X
(4.53)
Thực tế có thể xảy ra trƣờng hợp mà mối quan hệ giữa giá trị chuyển dịch
công trình và các yếu tố gây ra chuyển dịch không tuân theo quy luật tuyến tính. Khi
đó chúng ta có thể dựa vào mối quan hệ toán học để chuyển hàm hồi quy phi tuyến về
dạng tuyến tính bằng các phép biến đổi phù hợp. Một số dạng hàm hồi quy phi tuyến
có thể đƣa về dạng hàm hồi quy tuyến tính nhƣ: hồi quy lũy thừa, hồi quy mũ, hồi
quy parabol, hồi quy hyperbol và hồi quy logarit. Vấn đề chuyển các hàm hồi quy phi
tuyến này về hàm hồi quy tuyến tính đƣợc trình bày trong tài liệu [31].
4.5.
TRONG QUÁ TRÌNH THI CÔNG MÓNG VÀ TẦNG HẦM
4.5.1. Một số tiêu chí dùng đánh giá hư hại sự cố công trình lân cận
Trên hình 4.5 trình bày các định nghĩa những biến dạng chính của công trình
nằm trong phạm vi ảnh hƣởng của hố đào và sau đó là các công thức xác định
chúng theo Cording et al (2001) do [11] trích dẫn.
Theo [11] Moorak Son (2003) dẫn kết quả nghiên cứu của Cording et al
(2001) về cách xác lập một số thông số biến dạng của công trình để đánh giá hƣ hại
dựa trên trị biến dạng trung bình quan trắc đƣợc từ công trình lân cận hố đào. Biến
dạng của tƣờng đƣợc xác định bởi đo đạc theo phƣơng thẳng đứng (v), theo phƣơng
ngang (l), chuyển dịch (AV BV CV DV Al Bl Cl Dl) tại 4 góc (A, B, C, D) nhƣ trình
bày trên hình 4.5.

87
NhÞp 1
6100
4.83
38.77
8.926.54
4.83
6.12
4.83-3.40
30.90
39.12
14.73
16.51
14.48
6.35
14.48
-3.58
5100
H
A
L
B
NhÞp 2 NhÞp 3
C D
Hình 4.5. Biến dạng của công trình lân cận hố đào
Nhƣ vậy, để có số liệu dùng trong đánh giá tình trạng kỹ thuật của công trình
lân cận hố đào phải tiến hành khảo sát những công trình ấy trƣớc khi xây dựng cũng
nhƣ thực hiện quan trắc nó cẩn thận theo chƣơng trình xác định trong suốt quá trình
thi công hố đào.
Từ các số liệu đo đạc dùng các tiêu chí sau để đánh giá [11]:
- Độ dốc trung bình (S) là sự thay đổi độ dốc tại đáy nhà trên chiều dài L:
V VA - B
S L
(4.54)
- Độ nghiêng (T) là góc xoay của tƣờng đƣợc tính theo công thức:
l l l l(C - B ) (D - A )
T 2H
hoặc l l(C - B )
T H
(4.55)
- Biến dạng góc ( ) là biến dạng cắt đƣợc tính theo công thức:
= S – T (4.56)
- Biến dạng ngang tại đỉnh lat(T) là sự thay đổi chuyển dịch ngang tại đỉnh
công trình trên toàn chiều dài L:
l llat
D - C(T)
L (4.57)

88
- Biến dạng ngang tại đáy lat(F) là sự thay đổi chuyển dịch ngang tại đáy
móng trên toàn chiều dài L:
l llat
A - B(F)
L (4.58)
Theo [11] thì Burland (1995) sử dụng tỷ số biến dạng ( /L) để thay cho biến
dạng góc ( ) nhằm đánh giá sự hƣ hại của công trình, trong đó là chênh lún tại 2
điểm cách nhau L. Chú ý rằng biến dạng góc sẽ đƣợc dùng để đánh giá sự hƣ hại
của công trình hiện hữu gần hố đào:
L
(4.59)
Sử dụng các công thức trên ta tính toán các thông số biến dạng cho công
trình thực tế nêu trên hình 4.5, sẽ đƣợc [11]:
Tại nhịp 1:
- Độ dốc trung bình 38.77 16.54
S 3.64 (mm)6100
- Độ nghiêng 14.73 4.83
T 1.62 (mm)5100
- Biến dạng góc = 3.64 – 1.62 =2.02 (mm)
- Biến dạng ngang tại đỉnh lat(T) = 30.90 14.73
2.65 (mm)6100
- Biến dạng ngang tại đáy lat(F) = 8.92 4.83
0.67 (mm)6100
4.5.2. Đánh giá mức độ hư hại công trình lân cận
Trong [11] dẫn kết quả nghiên cứu của Storer J.Boone (1996) đã tổng hợp 3
yếu tố: bề rộng vết nứt, độ lún lệch (chênh lún / lún không đều) và biến dạng góc
(= /L) để phân chia mức độ hƣ hại công trình lân cận hố đào nhƣ trình bày
trong bảng 4.1.

89
Bảng 4.1. Phân cấp hư hại công trình theo biến dạng
Cấp
hư hại Mô tả sự hư hại
Bề rộng
khe nứt Lún lệch
Biến dạng
góc
= /L
Không
đáng kể (0)
Dấu nứt nẻ mỏng 0,1mm <3cm
(1,2 in)
<1/300
Rất nhẹ (1) Nứt mảnh, dễ xử lý trong khi trang
trí bình thƣờng. Trong nhà có thể
cô lập những chỗ nứt gẫy nhẹ.
Những nứt nẻ ở bên ngoài của
công trình xây bằng gạch có thể
nhận thấy khi nhìn kỹ.
1mm 3-4cm
(1,2-1,5in)
1/300-
1/240
Nhẹ (2) Những nét nẻ có thể dễ dàng trám.
Yêu cầu phải trang trí lại. Trong
tòa nhà có một số nứt gẫy. Những
nét nẻ có thể khá lớn. Yêu cầu trát
vữa lại để chống thấm. Cửa và cửa
sổ có thể bị kẹt nhẹ.
5mm 4-5cm
(1,5-2,0in)
1/240-
1/175
Trung bình
(3)
Những nứt nẻ có thể yêu cầu đạp
ra và vá lại. Định kỳ làm lớp vữa
trát để che dấu những nứt nẻ. Trát
lại bên ngoài của công trình xây
bằng gạch và có lẽ một số chỗ nhỏ
của công trình xây bằng gạch phải
sửa chữa lại. Cửa và cửa sổ có thể
bị kẹt. Hệ thống đƣờng ống có thể
bị đứt gẫy. Tính chống thấm tƣờng
bị suy yếu.
5mm –
15mm
5-8cm
(2,0-3,0in)
1/175-
1/120
Nặng (4) Nói chung việc sửa chữa gồm cả
phá và xây lại một phần tƣờng, đặc
biệt cả phần cửa và cửa sổ. Khung
cửa và cửa sổ bị uốn, sàn tầng bị
dốc rất đáng kể. Tƣờng bị nghiêng
hoặc phình ra rất đáng kể. Khả
năng chịu lực của dầm bị kém đi.
Hệ thống vệ sinh bị phá vỡ.
15mm –
25mm,
phụ thuộc
vào số
lƣợng của
khe nứt
8-13cm
(3,0-5,0in)
1/120-
1/70
Rất nặng
(5)
Yêu cầu chính về sửa chữa bao
gồm cả cục bộ hoặc xây lại hoàn
toàn. Dầm mất khả năng chịu lực;
tƣờng nghiêng xấu và yêu cầu
chống đỡ. Cửa sổ bị gẫy do uốn.
Tín hiệu báo nguy do mất ổn định.
Thƣờng
>25mm,
phụ thuộc
vào số
lƣợng của
khe nứt
>13cm
(>5,0in)
>1/70

90
Nhƣ vậy, dựa trên kết quả khảo sát và quan trắc công trình lân cận hố đào ta xếp
loại các hƣ hại theo bảng 4.1, từ đó sẽ đƣa ra các biện pháp (thiết kế và thi công) nhằm
quản lý rủi ro trong xây dựng móng và tầng hầm công trình nhà cao tầng.
4.5.3. Kiểm soát rủi ro và sự cố công trình lân cận hố đào
Để hệ kết cấu chống giữ hố đào cũng nhƣ công trình lân cận nó không xảy ra
sự cố phải khống chế chuyển dịch của công trình hố đào thông qua tính toán và
quan trắc. Ở các nƣớc Mỹ, Đức, Nga, Trung Quốc, … ngƣời ta đều định ra trị số
cảnh báo và trị khống chế (qua tiêu chuẩn thiết kế, thi công hoặc quản lý) để kiểm
soát rủi ro khi thi công hố đào trong đô thị.
Thƣờng dựa theo cấp của công trình hố đào để xác định trị khống chế lún mặt
đất và chuyển dịch ngang của thân tƣờng. Khi không có quy định riêng thì dùng các
tiêu chí trong bảng 4.2 để khống chế thiết kế và giám sát hố đào ở gần các công trình
có tầm quan trọng cấp 1 và cấp 2 [80].
Theo bảng 4.2 ta tiến hành kiểm soát sự an toàn (không xảy ra sự cố) của hố
đào nhƣ sau:
Bảng 4.2. Trị khống chế thiết kế và giám sát biến dạng hố móng công trình
Cấp
công trình
hố đào
Chuyển dịch
của đỉnh tƣờng
(cm)
Chuyển dịch
lớn nhất
của thân tƣờng
(cm)
Lún lớn nhất
ở mặt đất
(cm)
Trị
giám sát
khống chế
Trị
thiết kế
Trị
giám sát
khống chế
Trị
thiết kế
Trị
giám sát
khống chế
Trị
thiết kế
Công trình
cấp 1 3 5 5 8 3 5
Công trình
cấp 2 6 10 8 12 6 10

91
Trong thiết kế tùy theo tầm quan trọng của công trình, tƣ vấn thiết kế chỉ định
trị chuyển dịch, gọi là trị thiết kế của hố đào và của mặt đất lân cận hố đào, xem
chúng là trị giới hạn, trong quan trắc lúc thi công xem đây là ngƣỡng nguy hiểm.
Để an toàn còn có trị giám sát khống chế, xem chúng là ngƣỡng cảnh báo,
nếu số liệu quan trắc trong thi công đạt ngƣỡng này thì cần tăng gấp đôi tần xuất
quan trắc để phát hiện xu hƣớng phát triển các chuyển dịch của hố đào cũng nhƣ các
biến dạng của công trình lân cận.
Nếu chuyển dịch và biến dạng nói trên quá mức và có khả năng gần với giới
hạn thì nhà thầu lập tức dừng mọi hoạt động xây lắp và thông báo ngay cho chủ đầu
tƣ, triển khai biện pháp phòng ngừa. Chỉ khi số liệu đạt ổn định mới tiếp tục thi
công hố đào.
4.6. THÀNH LẬP PHẦN MỀM PHÂN TÍCH BIẾN DẠNG NỀN MÓNG VÀ
TẦNG HẦM
4.6.1. Ngôn ngữ lập trình
Ngôn ngữ sử dụng để lập trình là ngôn ngữa Visual Basic.NET (VB.NET).
VB.NET là ngôn ngữ lập trình khuynh hƣớng đối tƣợng do Microsoft thiết kế.
Dựa vào các thuật toán ở trên và ngôn ngữ lập trình VB.NET, trong luận án
đã thành lập phần mềm mang tên ADFB (Analysis of deformation of the foundation
and basement) để xử lý số liệu các bài toán trắc địa ở trên. Phần mềm đƣợc thành
lập có giao diện giúp cho ngƣời sử dụng dễ dàng thao tác, khả năng tính toán nhanh
và cho kết quả đáng tin cậy.
4.6.2. Thiết kế tổng quan phần mềm
Phần mềm ADFB đƣợc thiết kế gồm các tính năng nhƣ: tính toán chuyển
dịch; xây dựng mô hình chuyển dịch; phân tích và dự báo chuyển dịch. Các tính
năng chi tiết của phần mềm đƣợc trình bày trong bảng 4.3. Phần mềm có giao diện
tổng quát nhƣ hình 4.6, hình 4.7 là giao diện modul tính toán tham số chuyển dịch
ngang, hình 4.8 là giao diện modul xây dựng mô hình chuyển dịch ngang trong mặt
phẳng ngang.

92
Bảng 4.3. Tính năng của phần mềm ADFB
Tệp Tính toán
chuyển dịch
Mô hình
chuyển dịch
Phân tích
và dự báo
chuyển dịch
Trợ
giúp
Tạo
tệp
Độ lún
- Tham số lún
- Thể hiện đồ họa
lún
Mô hình lún
-Tính theo mặt phẳng
-Tính theo parabol
- Tính theo đường thẳng
-Phân tích tương
quan tuyến tính
đơn
- Dự báo chuyển
dịch theo hàm
đa thức
HDSD
Mở
tệp
Chuyển dịch
ngang
- Tham số CDN
- Đồ thị CDN
-Mặt cắt CDN
Mô hình chuyển dịch
ngang
- Trong mặt phẳng
ngang
- Trong mặt phẳng đứng
- Tính theo đường thẳng
Ghi
tệp
Ghi
tên
mới
Thoát
Giao diện tổng quát của phần mềm đƣợc thiết kế nhƣ hình 4.6.
Hình 4.6. Giao diện tổng quát phần mềm ADFB

93
Hình 4.7. Giao diện modul tính toán tham số chuyển dịch ngang
Hình 4.8. Giao diện modul xây dựng mô hình chuyển dịch ngang trong mặt phẳng

94
Chương 5
THỰC NGHIỆM
5.1. THỰC NGHIỆM QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY NHÀ
CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG MÓNG VÀ TẦNG HẦM
5.1.1.
quan trắc tự động
Quá trình thực nghiệm đƣợc thực hiện đối với tƣờng vây của một công trình
nhà cao tầng ở quận Ba Đình -
, chống đỡ thành
hố đào là tƣờng vây đƣợc neo trong đất.
Hệ thống sử dụng để quan trắc chuyển dịch liên tục của tƣờng vây là máy
TĐĐT Leica viva TS15PR1000 và phần mềm quan trắc GOCA [3], [39]. Máy TĐĐT
Leica viva TS15PR1000 có độ chính xác đo góc ngang và góc đứng là ±1.0”, đo cạnh
mS = ± (1mm+1,5ppm.D)mm, độ chính xác vị trí điểm là ±1.0mm (ở vị trí 1000m độ
chính xác đạt ±2.0mm), máy tự động bắt mục tiêu.
5.1. Sơ đồ ự độ
Trên 5.1
3.16b).
QT3 QT1
QT5
QT6
QT7
MC1
MC3 MC2
QT2 QT4

95
MC1,
3.17.
bằng những gƣơng phản xạ (hình 3.18).
100m).
.
5.2.
5.2

96
. Kết
hợp với các kết quả nghiên cứu trong [3], [5
nhƣợc điểm của phƣơng pháp truyền thống. Hệ thống quan trắ
ƣu điểm nổi trội hơn so với công nghệ truyền thống, đó là: Độ chính xác cao, thời gian
cung cấp kết quả nhanh nhất, cung cấp đƣợc nhiều thông tin nhất, giảm tối đa các
nguồn sai số đo và tính toán do yếu tố chủ quan của con ngƣời.
5.1.2. Thực nghiệm quan trắc chuyển dịch ngang tường vây công trình Cục tần
số vô tuyến điện bằng phương pháp trắc địa kết hợp với Inclinometer
Để kiểm chứng lý thuyết ở trên, chúng tôi tiến hành thực nghiệm đối với 5 vị trí
quan trắc (ICL1, ICL2, ICL3, ICL4 và ICL5) của tƣờng vây công trình Cục tần số vô
tuyến điện, tại số 115 Trần Duy Hƣng, Hà Nội. Chiều sâu của tƣờng vây là 27m, ống
dẫn hƣớng D70 đƣợc lắp đặt trong ống thép D114 (ống thép D114 đã đƣợc lắp cố định
vào trong lòng tƣờng vây trong quá trình thi công tƣờng vây) và đƣợc chèn bằng vữa
bê tông không co.
2 chu kỳ
quan trắc (chu kỳ 01: Đo ngày 14/06/2013; chu kỳ 02 đo ngày 08/07/2013). Căn cứ
vào mặt bằng xây dựng công trình, lƣới quan trắc bằng trắc địa đƣợc thiết kế là lƣới
đo góc – cạnh kết hợp nhƣ hình 5.3:
ICL1
ICL2
ICL3
ICL4
X
Y
ICL5
B
A MC3 MC4MC1
MC2
C«ng tr×nh hiÖn h÷u
§êng néi bé (®êng nhùa)
VØa hÌ
VØa hÌ
VØa h
Ì
§ê
ng
TrÇn
Du
y H
ngO
Têng v©y
IC1, ICL2, ICL3, ICL4, ICL5: §iÓm ®o chuyÓn vÞ b»ng Inclinometer
C«ng tr×nh ®ang thi c«ng
Hình 5.3. Hệ thống lưới quan trắc chuyển dịch ngang tường vây

97
Hình 5.4. Thiết kế điểm quan trắc kết hợp Inclinometer và Toàn đạc điện tử
Hệ tọa độ trắc địa đƣợc thiết lập có trục x song song với trục ngang và trục y
song song với trục dọc của công trình. Hệ thống lƣới quan trắc bằng trắc địa gồm 2
bậc lƣới: bậc lƣới khống chế và bậc lƣới quan trắc (hình 5.4). Quá trình đo đạc lƣới
khống chế và lƣới quan trắc để xác định tọa độ tâm của miệng ống dẫn hƣớng đƣợc
thực hiện bằng máy TĐĐT TCR1201 với độ chính xác đo góc là m 1.0” và
sai số đo cạnh S
m 1mm 1.5ppm.D mm theo đồ hình lƣới quan trắc ở hình
5.3. Độ chính xác quan trắc chuyển dịch ngang đề ra là q
m 5.0 mm , chọn hệ số
giảm độ chính xác k=2, từ đó tính đƣợc yêu cầu độ chính xác đối với lƣới cơ sở
CSqm 1.6 mm và lƣới quan trắc
QTqm 3.2 mm .
Trên hình 5.3: MC1, MC2, MC3, MC4: Mốc chuẩn; A, B: mốc trung gian;
ICL1, ICL2, ICL3, ICL4, ICL5: mốc quan trắc đo cả bằng trắc địa và Inclinometer.
Số liệu đo đạc hệ thống lƣới hình 5.3 đƣợc trình bày ở phụ lục A.
Inclinometer đƣợc thực hiện bằng thiết
bị đo chuyển dịch ngang GK603 do hãng Geokon của Mỹ chế tạo [44].
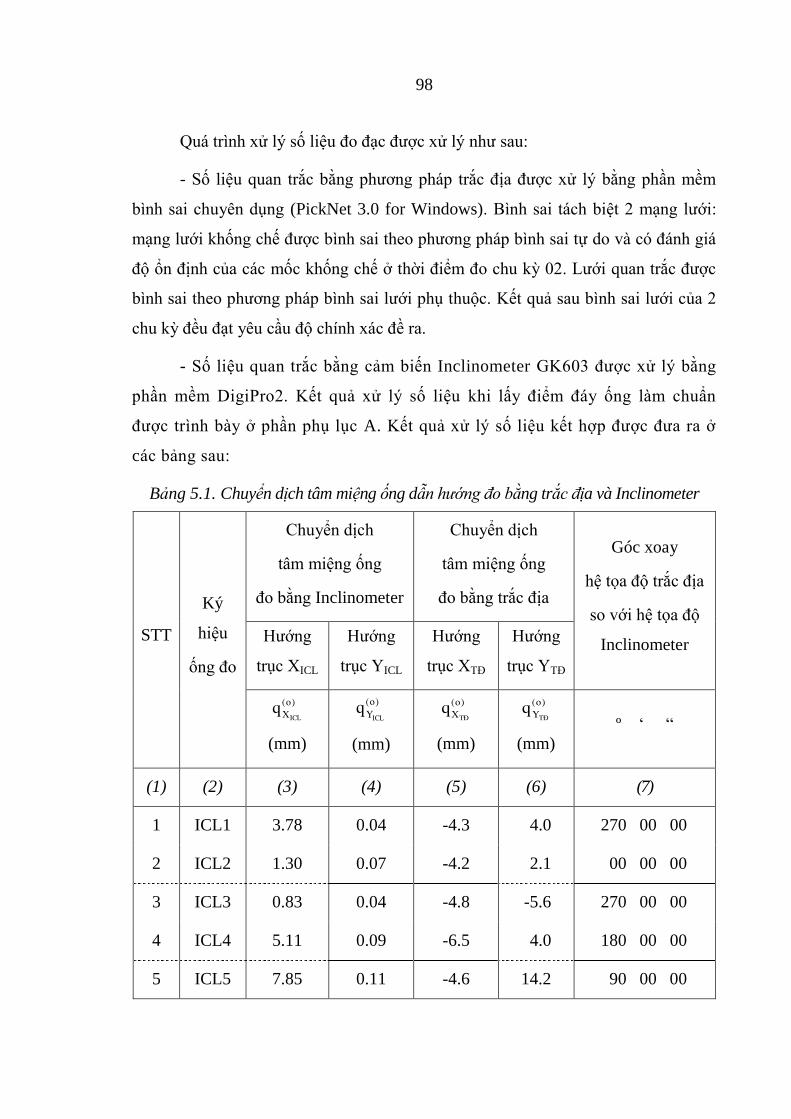
98
Quá trình xử lý số liệu đo đạc đƣợc xử lý nhƣ sau:
- Số liệu quan trắc bằng phƣơng pháp trắc địa đƣợc xử lý bằng phần mềm
bình sai chuyên dụng (PickNet 3.0 for Windows). Bình sai tách biệt 2 mạng lƣới:
mạng lƣới khống chế đƣợc bình sai theo phƣơng pháp bình sai tự do và có đánh giá
độ ổn định của các mốc khống chế ở thời điểm đo chu kỳ 02. Lƣới quan trắc đƣợc
bình sai theo phƣơng pháp bình sai lƣới phụ thuộc. Kết quả sau bình sai lƣới của 2
chu kỳ đều đạt yêu cầu độ chính xác đề ra.
- Số liệu quan trắc bằng cảm biến Inclinometer GK603 đƣợc xử lý bằng
phần mềm DigiPro2. Kết quả xử lý số liệu khi lấy điểm đáy ống làm chuẩn
đƣợc trình bày ở phần phụ lục A. Kết quả xử lý số liệu kết hợp đƣợc đƣa ra ở
các bảng sau:
Bảng 5.1. Chuyển dịch tâm miệng ống dẫn hướng đo bằng trắc địa và Inclinometer
STT
Ký
hiệu
ống đo
Chuyển dịch
tâm miệng ống
đo bằng Inclinometer
Chuyển dịch
tâm miệng ống
đo bằng trắc địa
Góc xoay
hệ tọa độ trắc địa
so với hệ tọa độ
Inclinometer Hƣớng
trục XICL
Hƣớng
trục YICL
Hƣớng
trục XTĐ
Hƣớng
trục YTĐ
ICL
(o)
Xq
(mm)
ICL
(o)
Yq
(mm)
T§
(o)
Xq
(mm)
T§
(o)
Yq
(mm) º „ “
(1) (2) (3) (4) (5) (6) (7)
1 ICL1 3.78 0.04 -4.3 4.0 270 00 00
2 ICL2 1.30 0.07 -4.2 2.1 00 00 00
3 ICL3 0.83 0.04 -4.8 -5.6 270 00 00
4 ICL4 5.11 0.09 -6.5 4.0 180 00 00
5 ICL5 7.85 0.11 -4.6 14.2 90 00 00

99
Dựa vào góc xoay hệ tọa độ trắc địa so với hệ tọa độ Inclinometer (góc xoay
xác định trên bản vẽ), tiến hành tính chuyển giá trị chuyển dịch tâm miệng ống dẫn
hƣớng đo bằng trắc địa trong hệ tọa độ trắc địa về hệ tọa độ Inclinometer theo công
thức (3.33) và tính độ lệch tâm miệng ống dẫn hƣớng theo công thức (3.34). Kết
quả tính toán đƣợc đƣa ra ở bảng 5.2.
Bảng 5.2. Độ lệch tâm miệng ống dẫn hướng
STT
Ký
hiệu
ống đo
Chuyển dịch
tâm miệng ống
đo bằng Inclinometer
Chuyển dịch
tâm miệng ống
đo bằng trắc địa Độ lệch
Hƣớng
trục XICL
Hƣớng
trục YICL
Hƣớng
trục XICL
Hƣớng
trục YICL
ICL
(o)
Xq
(mm)
ICL
(o)
Yq
(mm)
T§-ICL
(o)
Xq
(mm)
T§-ICL
(o)
Yq
(mm)
X
(o)
(mm)
(o)
Y
(mm)
(1) (2) (3) (4) (5) (6) (7)=(3)-(5) (8)=(4)-(6)
1 ICL1 3.78 0.04 -4.0 -4.3 7.78 4.34
2 ICL2 1.30 0.07 -4.2 2.1 5.50 -2.03
3 ICL3 0.83 0.04 5.6 -4.8 -4.77 4.84
4 ICL4 5.11 0.09 6.5 -4.0 -1.39 4.09
5 ICL5 7.85 0.11 14.2 4.6 -6.35 -4.49
Sau khi tính toán xác định đƣợc độ lệch tâm miệng ống dẫn hƣớng giữa hai
phƣơng pháp, nếu khẳng định đáy ống dẫn hƣớng là ổn định thì độ lệch này chính
là sai số khép của hai phƣơng pháp (trong trƣờng hợp thực nghiệm này đáy ống
dẫn hƣớng đƣợc coi là ổn định), tiến hành phân phối sai số này cho các điểm đo
trong lòng ống dẫn hƣớng theo công thức (3.35) sẽ xác định đƣợc giá trị chuyển
dịch với độ chính xác nâng cao. Bảng 5.3 là giá trị chuyển dịch của các điểm đo
bằng Inclinometer theo chiều sâu sau khi đã hiệu chỉnh sai số đối với điểm ICL5.

100
Bảng 5.3. Giá trị chuyển dịch của các điểm đo bằng Inclinometer sau khi hiệu chỉnh
sai số (điểm ICL5)
Độ sâu
quan trắc
(m)
Giá trị chuyển dịch
đo bằng Inclinometer Số hiệu chỉnh
Giá trị chuyển dịch
đo bằng trắc địa kết hợp
Inclinometer
XICL
(i)q
(mm)
YICL
(i)q
(mm)
X
(o)iH
H
(mm)
Y
(o)iH
H
(mm)
XICL-T§
(i)q
(mm)
YICL-T§
(i)q
(mm)
(1) (2) (3) (4) (5) (6) (7)
0.5 7.85 0.11 -6.35 -4.49 14.20 4.60
1.0 7.51 0.11 -6.23 -4.41 13.74 4.52
1.5 7.23 0.10 -6.11 -4.32 13.34 4.42
2.0 7.19 0.11 -5.99 -4.24 13.18 4.35
2.5 7.38 0.13 -5.87 -4.15 13.25 4.28
3.0 7.71 0.13 -5.75 -4.07 13.46 4.20
3.5 8.15 0.10 -5.63 -3.98 13.78 4.08
4.0 9.00 0.11 -5.51 -3.90 14.51 4.01
4.5 9.31 0.14 -5.39 -3.81 14.70 3.95
5.0 9.66 0.13 -5.27 -3.73 14.93 3.86
5.5 9.83 0.10 -5.15 -3.64 14.98 3.74
6.0 9.93 0.09 -5.03 -3.56 14.96 3.65
6.5 10.06 0.06 -4.91 -3.47 14.97 3.53
7.0 9.51 0.06 -4.79 -3.39 14.30 3.45
7.5 8.88 0.05 -4.67 -3.30 13.55 3.35
8.0 8.13 0.06 -4.55 -3.22 12.68 3.28
8.5 7.41 0.04 -4.43 -3.13 11.84 3.17
9.0 6.64 0.05 -4.31 -3.05 10.95 3.10
9.5 5.76 0.02 -4.19 -2.97 9.95 2.99
10.0 4.95 0.00 -4.07 -2.88 9.02 2.88
10.5 4.09 0.01 -3.95 -2.80 8.04 2.81
11.0 3.15 0.01 -3.83 -2.71 6.98 2.72
11.5 2.27 0.01 -3.71 -2.63 5.98 2.64
12.0 1.70 -0.01 -3.59 -2.54 5.29 2.53
12.5 1.20 0.00 -3.47 -2.46 4.67 2.46
13.0 0.76 0.01 -3.35 -2.37 4.11 2.38
13.5 0.35 0.00 -3.23 -2.29 3.58 2.29

101
(tiếp theo bảng 5.3)
Độ sâu
quan trắc
(m)
Giá trị chuyển dịch
đo bằng Inclinometer Số hiệu chỉnh
Giá trị chuyển dịch
đo bằng trắc địa kết hợp
Inclinometer
XICL
(i)q
(mm)
YICL
(i)q
(mm)
X
(o)iH
H
(mm)
Y
(o)iH
H
(mm)
XICL-T§
(i)q
(mm)
YICL-T§
(i)q
(mm)
(1) (2) (3) (4) (5) (6) (7)
14.0 0.24 -0.01 -3.12 -2.20 3.36 2.19
14.5 0.25 0.00 -3.00 -2.12 3.25 2.12
15.0 0.24 -0.01 -2.88 -2.03 3.12 2.02
15.5 0.24 -0.01 -2.76 -1.95 3.00 1.94
16.0 0.22 -0.03 -2.64 -1.86 2.86 1.83
16.5 0.22 -0.03 -2.52 -1.78 2.74 1.75
17.0 0.21 0.01 -2.40 -1.69 2.61 1.70
17.5 0.21 0.01 -2.28 -1.61 2.49 1.62
18.0 0.20 0.01 -2.16 -1.52 2.36 1.53
18.5 0.20 0.02 -2.04 -1.44 2.24 1.46
19.0 0.19 0.02 -1.92 -1.36 2.11 1.38
19.5 0.19 0.01 -1.80 -1.27 1.99 1.28
20.0 0.16 0.00 -1.68 -1.19 1.84 1.19
20.5 0.16 0.01 -1.56 -1.10 1.72 1.11
21.0 0.17 0.02 -1.44 -1.02 1.61 1.04
21.5 0.22 0.04 -1.32 -0.93 1.54 0.97
22.0 0.20 0.05 -1.20 -0.85 1.40 0.90
22.5 0.16 0.06 -1.08 -0.76 1.24 0.82
23.0 0.10 0.04 -0.96 -0.68 1.06 0.72
23.5 0.09 0.04 -0.84 -0.59 0.93 0.63
24.0 0.06 0.04 -0.72 -0.51 0.78 0.55
24.5 0.05 0.03 -0.60 -0.42 0.65 0.45
25.0 0.00 0.03 -0.48 -0.34 0.48 0.37
25.5 0.01 0.00 -0.36 -0.25 0.37 0.25
26.0 0.00 -0.01 -0. 24 -0.17 0.24 0.16
26.5 0.01 0.00 -0.12 -0.08 0.13 0.08
27.0 0.00 0.00 0.00 0.00 0.00 0.00

102
Sau khi tính toán hiệu chỉnh cho các giá trị chuyển dịch trong lòng ống dẫn
hƣớng, dựa vào kết quả thu đƣợc tiến hành dựng biểu đồ chuyển dịch theo trục của
điểm quan trắc. Hình 5.5 ở dƣới thể hiện đồ thị của điểm quan trắc (ICL5) trƣớc và
sau khi hiệu chỉnh sai số.
Hình 5.5. Đồ thị của điểm quan trắc ICL5 trước và sau khi hiệu chỉnh sai số

103
Trên hình 5.5 Biểu đồ trục A là đồ thị chuyển dịch theo hƣớng vuông góc với
tƣờng vây, biểu đồ trục B là đồ thị chuyển dịch theo hƣớng song song với tƣờng vây
của điểm ICL5. Các đồ thị trên đã thể hiện rõ nét giá trị chuyển dịch đo bằng
Inclinometer theo chiều sâu của tƣờng vây (đƣờng đồ thị đo bằng Inclinometer) và giá
trị chuyển dịch đo bằng Inclinometer đƣợc nâng cao độ chính xác sau khi kết hợp với
phƣơng pháp trắc địa (đƣờng đồ thị đo bằng trắc địa + Inclinometer). Nhƣ vậy, khi đáy
ống dẫn hƣớng đƣợc gắn vào lớp đất đá ổn định thì giải pháp kết hợp phƣơng pháp trắc
địa với phƣơng pháp sử dụng cảm biến cho phép nâng cao độ chính xác đối với các
điểm đo trong lòng tƣờng vây.
Để hiểu rõ về cách tính toán trong trƣờng hợp đối với đáy ống dẫn hƣớng không
ổn định. Trong trƣờng hợp thực nghiệm này chúng tôi giả định đáy ống dẫn hƣớng
đƣợc gắn vào lớp đất đá không ổn định. Khi đó các giá trị chuyển dịch tại miệng ống
dẫn hƣớng đo bằng Inclinometer khi lấy đáy ống làm chuẩn sẽ bao gồm cả chuyển dịch
của đáy ống gây nên. Do đó, tiến hành tính toán lại các trị đo Inclinometer với điểm
tham chiếu là điểm miệng ống và lấy giá trị chuyển dịch đo bằng trắc địa sau khi đã
đƣợc chuyển về hệ tọa độ Inclinometer hiệu chỉnh vào các trị đo Inclinometer theo
công thức (3.36). Kết quả thu đƣợc sau khi hiệu chỉnh đối với điểm ICL5 đƣợc thể hiện
trong bảng 5.4.
Bảng 5.4. Giá trị chuyển dịch của các điểm đo bằng Inclinometer sau khi hiệu chỉnh
chuyển dịch của điểm gốc (điểm ICL5)
Độ sâu
quan trắc
(m)
Giá trị chuyển dịch
đo bằng Inclinometer Số hiệu chỉnh
Giá trị chuyển dịch
sau khi hiệu chỉnh
chuyển dịch của điểm gốc
XICL
(i)q
(mm)
YICL
(i)q
(mm)
T§-ICL
(o)
Xq (mm)
T§-ICL
(o)
Yq
(mm)
XICL-T§
(i)q
(mm)
YICL-T§
(i)q
(mm)
(1) (2) (3) (4) (5) (6) (7)
0.5 0.00 0.00 14.20 4.60 14.20 4.60
1.0 -0.63 -0.01 14.20 4.60 13.57 4.59
1.5 -0.66 0.00 14.20 4.60 13.54 4.60
2.0 -0.48 0.01 14.20 4.60 13.72 4.61
2.5 -0.14 0.01 14.20 4.60 14.06 4.61

104
(tiếp theo bảng 5.4)
Độ sâu
quan trắc
(m)
Giá trị chuyển dịch
đo bằng Inclinometer Số hiệu chỉnh
Giá trị chuyển dịch
sau khi hiệu chỉnh
chuyển dịch của điểm gốc
XICL
(i)q
(mm)
YICL
(i)q
(mm)
T§-ICL
(o)
Xq (mm)
T§-ICL
(o)
Yq
(mm)
XICL-T§
(i)q
(mm)
YICL-T§
(i)q
(mm)
(1) (2) (3) (4) (5) (6) (7)
3.0 0.30 -0.01 14.20 4.60 14.50 4.59
3.5 1.15 0.00 14.20 4.60 15.35 4.60
4.0 1.46 0.03 14.20 4.60 15.66 4.63
4.5 1.81 0.01 14.20 4.60 16.01 4.61
5.0 1.97 -0.01 14.20 4.60 16.17 4.59
5.5 2.07 -0.03 14.20 4.60 16.27 4.57
6.0 2.21 -0.05 14.20 4.60 16.41 4.55
6.5 1.66 -0.05 14.20 4.60 15.86 4.55
7.0 1.02 -0.06 14.20 4.60 15.22 4.54
7.5 0.27 -0.05 14.20 4.60 14.47 4.55
8.0 -0.44 -0.07 14.20 4.60 13.76 4.53
8.5 -1.21 -0.06 14.20 4.60 12.99 4.54
9.0 -2.09 -0.09 14.20 4.60 12.11 4.51
9.5 -2.90 -0.11 14.20 4.60 11.30 4.49
10.0 -3.76 -0.10 14.20 4.60 10.44 4.50
10.5 -4.70 -0.10 14.20 4.60 9.50 4.50
11.0 -5.58 -0.10 14.20 4.60 8.62 4.50
11.5 -6.15 -0.13 14.20 4.60 8.05 4.47
12.0 -6.65 -0.11 14.20 4.60 7.55 4.49
12.5 -7.09 -0.10 14.20 4.60 7.11 4.50
13.0 -7.50 -0.11 14.20 4.60 6.70 4.49
13.5 -7.61 -0.13 14.20 4.60 6.59 4.47
14.0 -7.60 -0.11 14.20 4.60 6.60 4.49
14.5 -7.61 -0.13 14.20 4.60 6.59 4.47
15.0 -7.61 -0.13 14.20 4.60 6.59 4.47
15.5 -7.63 -0.14 14.20 4.60 6.57 4.46
16.0 -7.63 -0.14 14.20 4.60 6.57 4.46
16.5 -7.64 -0.10 14.20 4.60 6.56 4.50
17.0 -7.64 -0.10 14.20 4.60 6.56 4.50

105
(tiếp theo bảng 5.4)
Độ sâu
quan trắc
(m)
Giá trị chuyển dịch
đo bằng Inclinometer Số hiệu chỉnh
Giá trị chuyển dịch
sau khi hiệu chỉnh
chuyển dịch của điểm gốc
XICL
(i)q
(mm)
YICL
(i)q
(mm)
T§-ICL
(o)
Xq (mm)
T§-ICL
(o)
Yq
(mm)
XICL-T§
(i)q
(mm)
YICL-T§
(i)q
(mm)
(1) (2) (3) (4) (5) (6) (7)
17.5 -7.65 -0.10 14.20 4.60 6.55 4.50
18.0 -7.65 -0.09 14.20 4.60 6.55 4.51
18.5 -7.66 -0.09 14.20 4.60 6.54 4.51
19.0 -7.66 -0.10 14.20 4.60 6.54 4.50
19.5 -7.69 -0.11 14.20 4.60 6.51 4.49
20.0 -7.69 -0.10 14.20 4.60 6.51 4.50
20.5 -7.68 -0.09 14.20 4.60 6.52 4.51
21.0 -7.63 -0.08 14.20 4.60 6.57 4.52
21.5 -7.65 -0.06 14.20 4.60 6.55 4.54
22.0 -7.69 -0.05 14.20 4.60 6.51 4.55
22.5 -7.75 -0.07 14.20 4.60 6.45 4.53
23.0 -7.76 -0.07 14.20 4.60 6.44 4.53
23.5 -7.79 -0.07 14.20 4.60 6.41 4.53
24.0 -7.80 -0.09 14.20 4.60 6.40 4.51
24.5 -7.85 -0.09 14.20 4.60 6.35 4.51
25.0 -7.84 -0.11 14.20 4.60 6.36 4.49
25.5 -7.85 -0.13 14.20 4.60 6.35 4.47
26.0 -7.84 -0.11 14.20 4.60 6.36 4.49
26.5 -7.85 -0.11 14.20 4.60 6.35 4.49
27.0 -7.85 -0.11 14.20 4.60 6.35 4.49
Sau khi tính toán hiệu chỉnh chuyển dịch của điểm gốc cho các giá trị chuyển
dịch trong lòng ống dẫn hƣớng, dựa vào kết quả thu đƣợc tiến hành dựng biểu đồ
chuyển dịch theo trục của điểm quan trắc. Hình 5.6 ở dƣới thể hiện đồ thị của điểm
quan trắc trƣớc và sau khi hiệu chỉnh chuyển dịch của điểm gốc.

106
Hình 5.6. Đồ thị điểm ICL5 trước và sau khi hiệu chỉnh chuyển dịch của điểm gốc
Từ kết quả tính toán ở bảng 5.4 và đồ thị ở hình 5.6 có thể thấy rằng:
trong trƣờng hợp này giải pháp kết hợp phƣơng ph
áp trắc địa và phƣơng pháp sử dụng cảm biến Inclinometer cho phép lấy điểm
miệng ống làm điểm tham chiếu và xác định chỉnh xác giá trị chuyển dịch của
các điểm đo trong lòng tƣờng vây.

107
Nhận xét: Trên cơ sở kết quả thực nghiệm quan trắc chuyển dịch ngang
tƣờng vây bằng giải pháp kết hợp phƣơng pháp trắc địa với phƣơng pháp sử dụng
cảm biến Inclinometer. Có thể thấy rằng giải pháp kết hợp này đã cho phép nâng
cao chất lƣợng và hiệu quả công tác quan trắc biến dạng tƣờng vây nhà cao tầng
trong giai đoạn thi công xây dựng.
5.2. THỰC NGHIỆM THÀNH LẬP MÔ HÌNH LÚN NỀN MÓNG CÔNG TRÌNH
NHÀ CAO TẦNG TRONG GIAI ĐOẠN THI CÔNG MÓNG VÀ TẦNG HẦM
5.2.1. Thực nghiệm thành lập mô hình lún đối với móng công trình Nhà Văn
phòng số 22-24-26 Mạc Thị Bưởi, TP. HCM
Quá trình thực nghiệm đƣợc thực hiện đối với móng của công trình Nhà Văn
phòng số 22-24-26 Mạc Thị Bƣởi, Quận 1, TP. Hồ Chí Minh. Công trình có quy mô
2 tầng hầm và 9 tầng nổi, diện tích móng là khoảng 280m2, móng của công trình
đƣợc thiết kế là loại móng bè. Sau khi đổ bê tông móng tiến hành quan trắc lún tại
14 vị trí của móng [40]. Vị trí bố trí mốc quan trắc nhƣ ở hình 5.7.
RANH LOÄ GIÔÙI
TIM
Ñ
ÖÔ
ØNG
M
AÏC
TH
Ò BÖ
ÔÛI
VÆA HEØ
RANH KHU ÑAÁT
4
A
321
B
D
C
Ñi Ñöôøng Hai Baø Tröng
Ñi Ñaïi Loä Nguyeãn Hueä
LÔÏP MAÙI TOLE
M1 M7 M11
M2
M9
M8
M10
M12
M3
M6
M4
M5
M14M13
N2
N3
N4N1
M1 -:- M14 : VÒ TRÍ MOÁC QUAN TRAÉC LUÙN
Hình 5.7. Vị trí mặt bằng bố trí mốc quan trắc lún móng bè
M1, M2, …, M14: Vị trí mốc quan trắc lún

108
Bảng 5.5 là số liệu tọa độ, độ lún và sai số trung phƣơng độ lún của các mốc quan
trắc ở thời điểm chu kỳ 03 so với chu kỳ 01 (thời điểm ngày 22/10/2012 so với thời điểm
ngày 27/06/2012) [40].
Bảng 5.5. Tọa độ và độ lún của các mốc quan trắc lún móng bè
Số
TT
Tên mốc
quan trắc
Tọa độ Độ lún và sai số
Độ lún
S(mm)
Sai số
mS (mm) X(m) Y(m)
(1) (2) (3) (4) (5) (6)
1 M1 -3.995 -10.505 -8.05 0.46
2 M2 -0.710 -10.601 -7.71 0.45
3 M3 4.075 -10.609 -8.03 0.45
4 M4 3.990 -3.591 -8.10 0.45
5 M6 -3.989 -3.720 -8.02 0.46
6 M7 -3.981 3.494 -7.96 0.46
7 M8 -0.871 3.524 -7.92 0.45
8 M11 -3.951 8.351 -7.77 0.44
9 M12 0.074 8.630 -7.96 0.41
10 M13 4.662 6.615 -7.78 0.42
11 M14 4.701 8.408 -7.85 0.42
12 M5 -0.879 -3.690 -7.85 0.46
13 M9 3.998 3.619 -8.09 0.45
14 M10 0.258 6.583 -7.41 0.45
Từ số liệu ở bảng 5.5, sử dụng các mốc quan trắc có số thứ tự từ 1 đến 11 để
xây dựng mô hình. Các mốc có số thứ tự từ 12 đến 14 (M5, M9, M10) còn lại

109
không tham gia xây dựng mô hình mà để so sánh với độ lún nội suy từ mô hình.
Quá trình xây dựng mô hình lún đƣợc thực hiện bằng modul xây dựng mô hình lún
tính theo mặt phẳng của phần mềm ADFB và kết quả cuối cùng thu đƣợc nhƣ sau:
Phương trình mặt phẳng lún: S = -0.0000001x + 0.0000056y -0.00792 (m)
1. Lún tại trọng tâm của móng : -7.92 mm
2. Góc nghiêng lớn nhất của mặt phẳng lún : 0º 0' 0''
3. Hƣớng nghiêng lớn nhất : -89º 27' 48''
4. Sai số mô hình : 0.13 mm
Đánh giá biến dạng móng công trình:
Từ số liệu ở cột (6) của bảng 5.5 đối với các mốc có số thứ tự từ 1 đến 11,
tính đƣợc m0 = 0.44 mm. Khi đó:
2
2
0.13F 0.09
0.44; Fgh = F α=0.05 (8,11) = 2.948
Trong trƣờng hợp này ghF F , nên có thể coi sai số mô hình nằm trong giới
hạn của sai số xác định độ lún, điều đó chứng tỏ móng công trình không bị biến
dạng. Bảng 5.6 là kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
đối với các mốc quan trắc M5, M9 và M10.
Bảng 5.6. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
Số
TT
Tên mốc
quan trắc
Tọa độ Độ lún (mm)
X(m) Y(m) Đo
thực tế
Nội suy
theo mô
hình
Độ lệch
(1) (2) (3) (4) (5) (6) (7)=(5)-(6)
1 M5 -0.879 -3.690 -7.85 -7.94 0.09
2 M9 3.998 3.619 -8.09 -7.90 -0.19
3 M10 0.258 6.583 -7.41 -7.88 0.47

110
Từ bảng 5.6 có thể nhận thấy rằng độ lệch giữa độ lún đo thực tế và độ lún
nội suy từ mô hình là nhỏ và nằm trong giới hạn của sai số xác định độ lún, trong
trƣờng hợp này sử dụng phƣơng trình mặt phẳng để xây dựng mô hình lún của
móng công trình là phù hợp.
Trong phần thực nghiệm này tiến hành xây dựng mô hình lún theo trục A của
móng để minh chứng cụ thể về xây dựng mô hình lún theo trục.
Thực nghiệm xây dựng mô hình lún theo trục A của móng
Trên hình 5.7 trục A đƣợc bố trí 4 mốc quan trắc lún, tọa độ dọc theo trục, độ
lún và sai số trung phƣơng độ lún của các mốc quan trắc đƣợc trình bày ở bảng 5.7.
Bảng 5.7. Tọa độ và độ lún của các mốc trên trục A
Số
TT
Tên mốc
quan trắc
Tọa độ
Độ lún và sai số
Độ lún
S(mm)
Sai số
mS (mm) X(m)
(1) (2) (3) (5) (6)
1 M1 -8.547 -8.05 0.46
2 M6 -1.762 -8.02 0.46
3 M11 10.309 -7.77 0.44
4 M7 5.452 -7.96 0.46
Từ số liệu ở bảng 5.7, sử dụng các mốc quan trắc M1, M6, M11 để xây dựng
mô hình. Mốc M7 còn lại không tham gia xây dựng mô hình mà để so sánh với độ
lún nội suy theo mô hình. Quá trình xây dựng mô hình lún đƣợc thực hiện bằng
modul xây dựng mô hình lún tính theo đƣờng thẳng của phần mềm ADFB và kết
quả cuối cùng thu đƣợc nhƣ sau:
Phương trình đường thẳng lún: S = 0.0000155x -0.00795 (m)
1. Lún tại trọng tâm So: -7.95 mm
2. Góc nghiêng : 0º 00‟03''
3. Sai số mô hình : 0.06 mm

111
Bảng 5.8 là kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
đối với mốc quan trắc M7.
Bảng 5.8. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
Số
TT
Tên mốc
quan trắc
Tọa độ Độ lún (mm)
X(m) Đo thực tế Nội suy
theo mô hình Độ lệch
(1) (2) (3) (5) (6) (7)=(5)-(6)
1 M7 5.452 -7.96 -7.87 -0.09
Từ kết quả xây dựng mô hình và kết quả so sánh độ lún đo thực tế với độ lún
nội suy đƣợc từ mô hình cho thấy trong trƣờng hợp này sử dụng phƣơng trình
đƣờng thẳng để xây dựng mô hình lún theo trục là phù hợp.
Nhận xét: Trên cơ sở kết quả thực nghiệm xây dựng mô hình lún đối với
móng bè có kết cấu cứng ở trên cho thấy việc sử dụng phƣơng trình mặt phẳng để
xây dựng mô hình lún cho toàn bộ móng công trình và phƣơng trình đƣờng thẳng để
xây dựng mô hình lún theo trục của móng công trình đối với các móng công trình
có kết cấu cứng là phù hợp. Khi xây dựng mô hình, áp dụng phân tích phƣơng sai sẽ
cho phép đánh giá xem móng công trình có bị biến dạng hay không.
5.2.2. Thực nghiệm xây dựng mô hình lún nền công trình Trung tâm giao dịch
và Tổng đài Nam Hà Nội
Quá trình thực nghiệm đƣợc thực hiện đối với lún nền đất nguyên thổ của
công trình Trung tâm giao dịch và Tổng đài Nam Hà Nội, tại số 811 Đƣờng Giải
Phóng, Hà Nội [41]. Hình 5.8 là vị trí mặt bằng bố trí mốc quan trắc lún công trình
và lún nền công trình. Các mốc 1, 2, …, 24 là mốc quan trắc lún gắn ở cột tầng
hầm. Mốc NT1, NT2, …, NT14 là mốc quan trắc lún nền đất nguyên thổ. Mốc
BM1, BM2, …, BM14 là mốc quan trắc lún bề mặt đất. Quá trình thực nghiệm xây
dựng mô hình lún đƣợc thực hiện đối với lún nền đất nguyên thổ chứa đựng các
mốc quan trắc từ NT1 đến NT10. Tọa độ, độ lún và sai số trung phƣơng độ lún của
các mốc quan trắc từ NT1 đến NT10 đƣợc trình bày ở bảng 5.9.

112
12345678
a
b
c
NT1
NT2NT3
NT6
BM3
BM1
BM2
NT4
NT5
BM4
BM7
NT8
BM5
NT7
NT9
BM6
BM8
NT10
NT14BM9
BM10
NT11BM11BM12
NT12
NT13
BM13
BM14
1
2
3
4
5
6
7
8
9 12
11
10 13
14
15 18
17
16 19
20
21
22
23
24
Hình 5.8. Vị trí mặt bằng bố trí mốc quan trắc lún công trình và lún nền
Bảng 5.9. Tọa độ và độ lún của các mốc quan trắc
Số
TT
Tên
mốc
Tọa độ Độ lún và sai số
Độ lún
S(mm)
Sai số
mS
(mm) X(m) Y(m)
(1) (2) (3) (4) (5) (6)
1 N1 17.040 1.484 -26.72 0.27
2 N2 12.515 3.673 -22.09 0.29
3 N4 -0.634 -5.864 -34.16 0.25
4 N5 -0.395 2.582 -23.84 0.26
5 N6 12.243 -7.032 -33.31 0.26
6 N7 -13.473 -5.164 -37.44 0.24
7 N8 -5.721 4.350 -23.11 0.27
8 N10 -21.574 5.970 -29.09 0.22
9 N3 9.613 2.463 -23.85 0.29
10 N9 -11.776 3.505 -27.79 0.30

113
Trên bảng 5.9 độ lún của các mốc quan trắc là độ lún tại thời điểm quan trắc chu
kỳ 12 so với chu kỳ 01 (thời điểm ngày 08/09/2005 so với thời điểm ngày 23/09/2004).
Từ số liệu ở bảng 5.9, sử dụng các mốc quan trắc có số thứ tự từ 1 đến 8 để
xây dựng mô hình. Các mốc có số thứ tự từ 9 đến 10 (N3, N9) còn lại không tham
gia xây dựng mô hình mà để so sánh với độ lún nội suy theo mô hình. Quá trình xây
dựng mô hình lún đƣợc thực hiện bằng modul xây dựng mô hình lún tính theo
parabol của phần mềm ADFB và kết quả cuối cùng thu đƣợc nhƣ sau:
Mô hình lún nền dạng parabol:
S = -0.02773 + 0.0001905x + 0.0012355y -0.0000134x2 + 0.0000004xy + 0.0000492y2 (m)
Với sai số mô hình là: 0.76 mm
Bảng 5.10 là kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
đối với các mốc quan trắc N3 và N9.
Bảng 5.10. Kết quả so sánh độ lún đo thực tế với độ lún nội suy từ mô hình
Số
TT
Tên mốc
quan trắc
Tọa độ Độ lún (mm)
X(m) Y(m) Đo Mô hình Độ lệch
(1) (2) (3) (4) (5) (6) (7)=(5)-(6)
1 N3 9.613 2.463 -23.85 -23.79 -0.06
2 N9 -11.776 3.505 -27.79 -26.91 -0.88
Nhận xét: Trên cơ sở kết quả xây dựng mô hình và kết quả ở bảng 5.10 nhận
thấy độ lệch giữa độ lún đo thực tế và độ lún nội suy từ mô hình nằm trong sai số
giới hạn xác định độ lún nền đất xung quanh hố móng công trình. Do vậy, trong
trƣờng hợp này sử dụng hàm parabol để xây dựng mô hình lún đối với nền đất xung
quanh hố móng công trình là phù hợp.
5.3. THỰC NGHIỆM XÂY DỰNG MÔ HÌNH CHUYỂN DỊCH NGANG
TƢỜNG VÂY
5.3.1. Thực nghiệm xây dựng mô hình chuyển dịch ngang tường vây công
trình Golden Palace, Hà Nội trong mặt phẳng ngang
Quá trình thực nghiệm đƣợc thực hiện đối với tƣờng vây công trình Golden
Palace, Hà Nội. Hình 5.9 là mặt bằng bố trí 15 mốc quan trắc chuyển dịch ngang
tƣờng vây (QT1, QT2, …, QT15). Số liệu tọa độ, giá trị chuyển dịch và sai số trung
phƣơng độ chuyển dịch của các mốc quan trắc đƣợc thể hiện trong bảng 5.11.

114
QT7
QT5
QT6
QT9
QT8
QT10 QT11
QT12
QT13
QT14
QT15
QT1
QT2
QT3QT4
A
B
C
D
E
FG
H
I
KL
T¦êNG V¢Y
Hình 5.9. Bố trí mốc quan trắc chuyển dịch tường vây công trình Golden Palace
Bảng 5.11. Số liệu quan trắc chuyển dịch ngang
STT Tên
điểm
Tọa độ Chuyển dịch và sai số
X(m) Y(m) qX
(mm)
mqx
(mm)
qY
(mm)
mqy
(mm)
(1) (2) (3) (4) (5) (6) (7) (8)
1 QT1 39.752 51.483 -2.7 2.4 3.5 1.6
2 QT2 64.716 7.950 -2.1 2.1 3.7 1.9
3 QT4 85.778 -15.849 -0.4 1.5 2.9 1.9
4 QT6 45.192 -51.068 1.2 2.0 3.1 0.8
5 QT7 3.210 -50.952 0.7 0.6 1.7 0.7
6 QT8 -51.441 -50.956 -1.7 1.4 -0.9 0.9
7 QT9 -71.572 -30.997 -0.2 1.4 -5.2 0.7
8 QT11 -71.445 20.863 -2.7 1.7 -2.1 2.0
9 QT13 -37.928 59.749 1.0 2.6 2.4 1.5
10 QT14 -6.261 59.776 -2.9 2.9 3.1 1.4
11 QT3 86.203 0.252 -3.8 1.6 3.3 2.0
12 QT5 70.126 -43.504 1.1 1.4 1.7 0.7
13 QT10 -71.638 -2.677 -3.0 1.5 -0.7 1.9
14 QT12 -60.749 53.079 -1.0 2.1 1.2 1.7
15 QT15 16.865 59.674 -4.0 3.1 5.0 1.4

115
Các số liệu ở bảng 5.11 có đƣợc là do chúng tôi đã tiến hành quan trắc tƣờng
vây công trình Golden Palace bằng phƣơng pháp góc - cạnh với 2 chu kỳ quan trắc
trong giai đoạn công trình đang thi công tầng hầm 4, đỉnh tƣờng vây công trình đã
đƣợc đổ bê tông sàn cốt “00” (tƣờng vây đƣợc giữ ổn định bằng phƣơng pháp thi
công Top-down). Số liệu đo đạc và kết quả tọa độ sau bình sai của hệ thống lƣới
quan trắc đƣợc trình bày ở phụ lục B.
Từ số liệu ở bảng 5.11, sử dụng các điểm quan trắc có số thứ tự từ 1 đến 10
để xây dựng mô hình. Các điểm có số thứ tự từ 11 đến 15 còn lại không tham gia
xây dựng mô hình mà để so sánh với độ chuyển dịch nội suy theo mô hình. Quá
trình xây dựng mô hình chuyển dịch ngang đƣợc thực hiện bằng modul xây dựng
mô hình chuyển dịch ngang trong mặt phẳng ngang của phần mềm ADFB và kết
quả cuối cùng thu đƣợc nhƣ sau:
Mô hình chuyển dịch tường vây trong mặt phẳng ngang:
qx = -0.0009800 - 0.0000318Y + 0.0000095X (m)
qy = 0.0012200 + 0.0000318X + 0.0000095Y (m)
1. Dịch chuyển theo trục OX: -1.0 mm
2. Dịch chuyển theo trục OY: 1.2 mm
3. Góc Xoay : 0º 00' 07''
4. Biến dạng tỷ lệ : 1.000010
5. Sai số mô hình : 2.49 mm
Đánh giá biến dạng của tường vây:
Từ số liệu ở cột (6) và cột (8) của bảng 5.11 (đối với các điểm tham gia xây
dựng mô hình), tính đƣợc m0 = 1.72 mm. Khi đó:
2
2
2.49F 2.096
1.72; Fgh = F α=0.05 (16,20) = 2.20
Trong trƣờng hợp này F < Fgh, điều đó chứng tỏ tƣờng vây của công trình
không bị biến dạng. Bảng 5.12 là kết quả so sánh giá trị chuyển dịch đo thực tế với
giá trị chuyển dịch nội suy từ mô hình đối với các điểm quan trắc từ số thứ tự từ 11
đến 15 của bảng 5.12.

116
Bảng 5.12. Kết quả so sánh chuyển dịch đo thực tế với chuyển dịch nội suy từ mô hình
STT Tên
điểm
Tọa độ Chuyển dịch
đo
Chuyển dịch
tính từ mô hình Độ lệch
X(m) Y(m) qX
(mm)
qY
(mm)
qX
(mm)
qY
(mm)
dqX
(mm)
dqY
(mm)
(1) (2) (3) (4) (5) (6) (7) (8) (9)=(5)-(7) (10)=(6)-(8)
1 QT3 86.203 0.252 -3.8 3.3 -0.2 4.0 -3.6 -0.7
2 QT5 70.126 -43.504 1.1 1.7 1.1 3.0 0.0 -1.3
3 QT10 -71.638 -2.677 -3.0 -0.7 -1.6 -1.1 -1.4 0.4
4 QT12 -60.749 53.079 -1.0 1.2 -3.2 -0.2 2.2 1.4
5 QT15 16.865 59.674 -4.0 5.0 -2.7 2.3 -1.3 2.7
Từ kết quả xây dựng mô hình và kết quả so sánh độ chuyển dịch đo thực tế với
chuyển dịch nội suy từ mô hình (bảng 5.12), có thể nhận thấy rằng trong trƣờng hợp
này xây dựng mô hình chuyển dịch tƣờng vây trong mặt phẳng ngang là phù hợp.
Thực nghiệm xây dựng mô hình chuyển dịch ngang cho cạnh AB của tường vây
Trên hình 5.9 cạnh AB của tƣờng vây đƣợc bố trí 3 điểm quan trắc chuyển
dịch ngang, tọa độ dọc theo hƣớng song song với cạnh tƣờng vây và giá trị chuyển
dịch ngang vuông góc với tƣờng vây đƣợc trình bày ở bảng 5.13.
Bảng 5.13. Số liệu quan trắc chuyển dịch ngang cạnh AB của tường vây
STT Tên
điểm
Tọa độ Chuyển dịch và sai số
X(m) qY (mm) mqy (mm)
(1) (2) (3) (4) (5)
1 QT6 46.205 3.1 0.8
2 QT7 4.223 1.7 0.7
3 QT8 -50.428 -0.9 0.9
Từ số liệu ở bảng 5.13, sử dụng modul xây dựng mô hình chuyển dịch ngang
theo đƣờng thẳng của phần mềm ADFB để xây dựng mô hình và kết quả cuối cùng
thu đƣợc nhƣ sau:

117
Phương trình đường thẳng chuyển dịch: y = 0.0000417x + 0.00130 (m)
1. Chuyển dịch tại trọng tâm cạnh AB của tƣờng vây qo: 1.3 mm
2. Góc nghiêng của đƣờng thẳng chuyển dịch : 0º00‟09''
3. Sai số mô hình : 0.28 mm
Nhận xét: Trên cơ sở kết quả thực nghiệm ở trên cho thấy xây dựng mô hình
chuyển dịch ngang trong mặt phẳng ngang cho phép xác định các tham số đặc trƣng
cho chuyển dịch chung của toàn bộ tƣờng vây. Phƣơng trình đƣờng thẳng phù hợp
để xây dựng mô hình chuyển dịch cho từng cạnh của tƣờng vây. Phân tích phƣơng
sai cho phép đánh giá tƣờng vây công trình có bị biến dạng hay không.
5.3.2. Thực nghiệm xây dựng mô hình chuyển dịch ngang tường vây công
trình trong mặt phẳng đứng
Từ số liệu quan trắc chuyển dịch ngang tƣờng vây (tọa độ X, độ cao H, giá
trị chuyển dịch vuông góc với tƣờng vây và sai số trung phƣơng độ chuyển dịch
ngang) của 7 mốc quan trắc chuyển dịch ngang tƣờng vây đối với một công trình ở
ngoài sản xuất [42] (bảng 5.14).
Bảng 5.14. Số liệu quan trắc chuyển dịch ngang tường vây
STT Tên điểm Tọa độ
X(m)
Độ cao
H(m)
Chuyển dịch và sai số
Độ chuyển dịch
q(mm)
Sai số
mq (mm)
(1) (2) (3) (4) (5) (6)
1 DT13 -61.764 2.340 0.2 0.9
2 DT14 -27.986 2.340 1.1 0.7
3 DT16 40.027 2.340 -2.5 1.4
4 DT15GM 10.765 -3.510 3.3 1.6
5 DT16GM 38.957 -3.510 -3.3 1.6
6 DT15 6.014 2.340 1.5 0.9
7 DT14G -27.968 -3.510 2.0 1.5
Giá trị chuyển dịch ở bảng 5.14 là giá trị chuyển dịch tại thời điểm đo chu kỳ
17 so với thời điểm đo chu kỳ 16.

118
Từ số liệu ở bảng 5.14, sử dụng các điểm quan trắc có số thứ tự từ 1 đến 5 để
xây dựng mô hình. Các điểm có số thứ tự từ 6 đến 7 còn lại không tham gia xây
dựng mô hình mà để so sánh với độ chuyển dịch nội suy theo mô hình. Quá trình
xây dựng mô hình chuyển dịch ngang đƣợc thực hiện bằng modul xây dựng mô
hình chuyển dịch ngang trong mặt phẳng đứng của phần mềm ADFB và kết quả
cuối cùng thu đƣợc nhƣ sau:
Phương trình mặt phẳng chuyển dịch: q = -0.0000444x -0.0003826y -0.00024 (m)
1. Chuyển dịch tại trọng tâm : -0.24 mm
2. Góc nghiêng lớn nhất của mặt phẳng chuyển dịch : 0º 01' 19''
3. Hƣớng nghiêng lớn nhất : 83º 23' 09''
4. Sai số mô hình : 2.95mm
Đánh giá biến dạng của tường vây:
Từ số liệu ở cột (6) của bảng 5.14 (đối với các điểm tham gia xây dựng mô
hình), tính đƣợc m0 = 1.29 mm. Khi đó:
2
2
2.95F 5.229
1.29; Fgh = F α=0.05 (2,5) = 5.786
Trong trƣờng hợp này ghF F , nên có thể coi sai số mô hình nằm trong giới hạn
của sai số xác định chuyển dịch ngang, điều đó chứng tỏ tƣờng vây không bị biến dạng.
Bảng 5.15 là kết quả so sánh giá trị chuyển dịch đo thực tế với giá trị chuyển dịch
nội suy từ mô hình đối với các điểm quan trắc từ số thứ tự từ 6 đến 7 của bảng 5.14.
Bảng 5.15. Kết quả so sánh chuyển dịch đo thực tế với chuyển dịch nội suy từ mô hình
STT Tên điểm Tọa độ
X(m)
Độ cao
H(m)
Chuyển
dịch đo
qđo(mm)
Chuyển
dịch tính từ
mô hình
qmh(mm)
Độ lệch
(mm)
(1) (2) (3) (4) (5) (6) (7)=(5)-(6)
1 DT15 6.014 2.340 1.5 -1.4 2.9
2 DT14G -27.968 -3.510 2.0 2.3 -0.3
Nhận xét: Từ kết quả xây dựng mô hình và kết quả so sánh độ chuyển
dịch đo thực tế với chuyển dịch nội suy từ mô hình (bảng 5.15), có thể nhận thấy

119
rằng trong trƣờng hợp này xây dựng mô hình chuyển dịch tƣờng vây trong mặt
phẳng đứng là phù hợp. Trong quá trình xây dựng mô hình cần tiến hành phân
tích phƣơng sai để đánh giá biến dạng của tƣờng vây.
5.4. THỰC NGHIỆM PHÂN TÍCH TƢƠNG QUAN TUYẾN TÍNH ĐƠN
GIỮA MỰC NƢỚC NGẦM VÀ ĐỘ LÚN NỀN NHÀ CAO TẦNG
một công trình ở ngoài sản xuất
[42], [43] : thời gian quan trắc,
BM15 5.16).
Bảng 5.16. Kế ắc mực nước ngầm và quan trắ
Stt Thời gian
đo
H (m)
S(mm) Stt
Thời gian
đo
H
(m)
S(mm)
1 14/02/2011 -9.03 -0.05 20 26/06/2011 -8.88 -39.60
2 22/02/2011 -8.99 -0.32 21 03/07/2011 -8.73 -39.25
3 01/03/2011 -9.04 -0.16 22 10/07/2011 -8.71 -39.84
4 08/03/2011 -9.05 -0.41 23 17/07/2011 -8.63 -39.83
5 15/03/2011 -9.16 -0.55 24 24/07/2011 -8.62 -39.99
6 22/03/2011 -9.12 -6.42 25 01/08/2011 -8.53 -40.63
7 01/04/2011 -9.10 -17.06 26 09/08/2011 -8.49 -41.41
8 06/04/2011 -9.13 -20.20 27 17/08/2011 -8.48 -41.23
9 13/04/2011 -9.19 -22.14 28 21/08/2011 -8.53 -41.81
10 18/04/2011 -9.21 -22.89 29 28/08/2011 -8.51 -42.23
11 25/04/2011 -9.21 -22.93 30 04/09/2011 -8.53 -43.18
12 03/05/2011 -9.22 -25.13 31 14/09/2011 -8.49 -43.46
13 10/05/2011 -9.23 -24.93 32 18/09/2011 -8.53 -44.26
14 17/05/2011 -9.19 -30.62 33 27/09/2011 -8.51 -44.68
15 25/05/2011 -9.14 -37.21 34 05/10/2011 -8.51 -44.80
16 29/05/2011 -9.15 -37.94 35 10/10/2011 -8.53 -44.73
17 06/06/2011 -9.10 -38.30 36 19/10/2011 -8.49 -44.27
18 15/06/2011 -8.99 -38.95 37 30/10/2011 -8.53 -44.59
19 20/06/2011 -8.93 -39.08

120
Từ số liệu ở bảng 5.16 sử dụng modul phân tích tƣơng quan tuyến tính đơn
của phần mềm ADFB để tính toán và kết quả
thu đƣợc nhƣ sau:
1. Hệ số tƣơng quan: xyr 0.68
2. Hàm Fisher: Z = -0.83
3. Phƣơng sai của đại lƣợng Z: Z
0.17
4. Phƣơng trình hồi quy thể hiện mối quan hệ giữa S và H
S = -0.03546H -0.34475 (m) ; (H - đơn vị là mét)
Qua kết quả phân tích tƣơng quan ở trên cho thấy: độ lún nền đất công trình
và mực nƣớc ngầm có mối quan hệ tƣơng quan vừa.
Nhận xét: Trên cơ sở kết quả thực nghiệm nhận thấy phƣơng pháp phân tích
tƣơng quan tuyến tính đơn dùng để đánh giá mức độ phụ thuộc của chuyển dịch với
một nhân tố có thể ảnh hƣởng đến độ chuyển dịch đó là hoàn toàn thích hợp.
Phƣơng pháp này giúp chúng ta biết đƣợc nhân tố mà chúng ta nghi ngờ là có thể
ảnh hƣởng đến độ chuyển dịch công trình thực ra nó có ảnh hƣởng hay không và
khi có ảnh hƣởng thì mức độ phụ thuộc của nhân tố này đến độ chuyển dịch công
trình nhƣ thế nào.
5.5. THỰC NGHIỆM DỰ BÁO ĐỘ LÚN NỀN CÔNG TRÌNH THEO HÀM
ĐA THỨC
Quá trình thực nghiệm đƣợc thực hiện đối với 1 mốc (mốc NT11) đo lún nền
đất nguyên thổ của công trình Trung tâm giao dịch và Tổng đài Nam Hà Nội, tại số
811 Đƣờng Giải Phóng, Hà Nội [41], đƣợc đo 11 chu kỳ (không kể chu kỳ quan trắc
đầu tiên), số liệu quan trắc gồm thời gian, độ lún và sai số trung phƣơng độ lún
(bảng 5.17).
Sử dụng số liệu 07 chu kỳ (chu kỳ 1 đến chu kỳ 7) để lập mô hình, số liệu
chu kỳ 8 đến 11 đƣợc dùng để làm kết quả đánh giá mức độ phù hợp của phân
tích lý thuyết và thực tế. Lần lƣợt xây dựng mô hình từ bậc 0 đến bậc 5, kết quả
tính toán hệ số đa thức và sai số mô hình bằng phần mềm ADFD đƣợc đƣa ra
trong bảng 5.18.

121
Bảng 5.17. Kế ắ nguyên thổ tại mốc NT11
Chu kỳ Thời gian
quan trắc (tháng)
Độ lún và sai số
S(mm)
Sai số
mS (mm)
(1) (2) (3) (4)
0 0 0 -
1 1.06 -4.59 0.30
2 2.06 -9.00 0.26
3 3.13 -13.13 0.24
4 4.16 -16.40 0.25
5 5.23 -20.16 0.29
6 6.23 -23.41 0.28
7 7.23 -27.52 0.24
8 8.50 -33.63 0.24
9 9.43 -37.09 0.31
10 10.46 -40.79 0.29
11 11.50 -43.61 0.29
Bảng 5.18. Kế ựng mô hình theo hàm đa thức
Số
TT
Bậc
đa
thức
Hệ số đa thức Sai số
mô hình
(mm) a0 a1 a2 a3 a4 a5
1 0 -16.316 -------- -------- -------- -------- -------- 8.081
2 1 -1.291 -3.614 -------- -------- -------- -------- 0.401
3 2 -0.711 -3.987 0.045 -------- -------- -------- 0.392
4 3 1.202 -6.071 0.632 -0.047 -------- -------- 0.130
5 4 0.979 -5.735 0.477 -0.020 -0.002 -------- 0.156
6 5 1.925 -7.520 1.629 -0.349 0.041 -0.002 0.212
Từ kết quả xây dựng mô hình ở bảng 5.18, tiến hành đánh giá mức độ tin cậy của
mô hình. Kết quả đánh giá mức độ tin cậy của mô hình đƣợc đƣa ra trong bảng 5.19.

122
Bảng 5.19. Kế ức độ tin cậy của mô hình
Số
TT
Bậc
đa
thức
Sai số
mô hình
(mm)
Sai số trung bình
xác định độ lún
(mm)
F Fgh Ghi chú
1 0 8.081 0.27 895.783 3.866 Fgh =F0.05(6,7)
2 1 0.401 0.27 2.206 3.972 Fgh =F0.05(5,7)
3 2 0.392 0.27 2.108 4.120 Fgh =F0.05(4,7)
4 3 0.130 0.27 0.232 4.347 Fgh =F0.05(3,7)
5 4 0.156 0.27 0.334 4.737 Fgh =F0.05(2,7)
6 5 0.212 0.27 0.617 5.591 Fgh =F0.05(1,7)
Từ kết quả đƣa ra ở bảng 5.19, đa thức từ bậc 1 đến bậc 5 đều có F<Fgh . Đa
thức bậc 2 là đa thức có số bậc nhỏ và có sai số mô hình tƣơng đƣơng với sai số đo
độ lún nên đƣợc chọn làm mô hình dự báo và mô hình là:
2
tS 0.711 3.987t 0.045t (mm)
Sử dụng mô hình đa thức bậc 2 này để dự báo độ lún từ chu kỳ 8 đến chu kỳ
11. Kết quả dự báo đƣợc so sánh với độ lún đo thực tế và đƣợc đƣa ra ở bảng 5.20.
Bảng 5.20. Kế ộ lún đo và độ lún dự báo từ chu kỳ 8 đến chu kỳ 11
Chu
kỳ
Thời gian
quan trắc so
với chu kỳ đầu
(tháng)
Độ lún
đo thực tế
(mm)
Độ lún
dự báo theo mô
hình đa thức bậc 2
(mm)
Sai số
dự báo
(mm)
Độ lệch
giữa độ lún đo và
độ lún dự báo
(mm)
8 8.50 -33.63 -31.35 0.69 -2.28
9 9.43 -37.09 -34.31 1.04 -2.78
10 10.46 -40.79 -37.49 1.52 -3.30
11 11.50 -43.61 -40.61 2.10 -3.00
Nhận xét: Trên cơ sở kết quả thực nghiệm, có thể thấy rằng khi sử dụng hàm
đa thức để dự báo độ lún, kết quả dự báo càng chính xác khi điểm nội suy có thời
gian càng gần với chu kỳ quan trắc cuối cùng. Thời điểm dự báo càng xa thời điểm
quan trắc chu kỳ cuối thì sai số dự báo càng lớn, giá trị độ lún dự báo nhận đƣợc có
độ chính xác thấp. Trong quá trình xây dựng mô hình cần tiến hành phân tích
phƣơng sai để đánh giá mức độ tin cậy của mô hình.

123
KẾT LUẬN VÀ KIẾN NGHỊ
1. Kết luận
Trên cơ sở các nghiên cứu về lý thuyết và kết quả thực nghiệm đã trình bày
trong luận án, nghiên cứu sinh rút ra một số kết luận sau:
1/ Trong luận án đã phân tích đặc điểm của phƣơng pháp trắc địa, phƣơng
pháp sử dụng cảm biến trong quan trắc lún, quan trắc chuyển dịch nền móng và
tầng hầm nhà cao tầng. Đề xuất giải pháp kết hợp hai phƣơng pháp trên nhằm
nâng cao hiệu quả quan trắc biến dạng nền móng và tầng hầm nhà cao tầng trong
giai đoạn thi công xây dựng.
2/ Mô hình biến dạng công trình thành lập trên cơ sở số liệu quan trắc cho
phép phân tích độ lún cũng nhƣ chuyển dịch ngang nền móng, tƣờng vây nhà cao
tầng theo thời gian, trong không gian và đánh giá sự phụ thuộc giữa biến dạng với
tác nhân gây ra biến dạng đó.
trắc đã khắc phục đƣợc nhiều nhƣợc điểm của phƣơng pháp truyền thống. Hệ thống
qua ,
đó là: Độ chính xác cao, thời gian cung cấp kết quả nhanh nhất, cung cấp đƣợc
nhiều thông tin nhất, giảm tối đa các nguồn sai số đo và tính toán do yếu tố chủ
quan của con ngƣời.
4/ Phần mềm xử lý số liệu ADFB hoàn toàn đủ độ tin cậy để giải quyết các
nhiệm vụ cơ bản của quá trình phân tích, đánh giá chuyển dịch của nền móng và
tƣờng vây công trình nhà cao tầng.
2. Kiến nghị
1/ Các số liệu quan trắc biến dạng nền móng và tầng hầm nhà cao tầng trong
giai đoạn thi công xây dựng cần đƣợc tính toán, phân tích kết quả một cách đầy đủ
và kết hợp với số liệu của thiết kế để đánh giá mức độ biến dạng của nền móng và
mức độ ảnh hƣởng của quá trình thi công hố đào đến các công trình lân cận.
2/ Các tiêu chí đánh giá mức độ hƣ hại công trình lân cận cần đƣợc đƣa vào TCVN
để làm cơ sở đánh giá mức độ hƣ hại công trình lân cận thông qua kết quả quan trắc.

124
DANH MỤC CÁC CÔNG TRÌNH KHOA HỌC CỦA TÁC GIẢ
ĐÃ CÔNG BỐ LIÊN QUAN ĐẾN NỘI DUNG LUẬN ÁN
1. Trần Ngọc Đông (2009), “Phân tích đánh giá kết quả quan trắc độ lún công
trình”, Tạp chí KHCN Xây dựng số 1/2009, ISSN 1859-1566, Hà Nội.
2. Trần Ngọc Đông (2011), “Tính toán và phân tích đánh giá thông số chuyển dịch
ngang công trình”, Tạp chí KHCN Xây dựng số 2/2011, ISSN 1859-1566,
Hà Nội.
3. Trần Ngọc Đông (2011), “Đánh giá mức độ phụ thuộc độ chuyển dịch công trình
vào một số yếu tố ngoại cảnh bằng phƣơng pháp phân tích tƣơng quan tuyến
tính đơn”, Tạp chí KHCN Xây dựng số 4/2011, ISSN 1859-1566, Hà Nội.
4. Trần Ngọc Đông, Diêm Công Huy (2012), “Ứng dụng máy Toàn đạc điện tử Leica
Viva TS15 và phần mềm GOCA để tự động quan trắc biến dạng tƣờng vây
nhà cao tầng”, Tạp chí KHCN Xây dựng số 3/2012, ISSN 1859-1566, Hà Nội.
5. Trần Ngọc Đông, Đoàn Đức Nhuận (2012), “Nghiên cứu sử dụng kết hợp toàn
đạc điện tử và Inclinometer để quan trắc chuyển dịch ngang tƣờng vây công
trình nhà cao tầng”, Tuyển tập báo cáo Hội nghị Khoa học cán bộ trẻ - Viện
KHCN Xây dựng - Lần thứ 12, Hà Nội 11/2012.
6. Trần Ngọc Đông, Trần Mạnh Nhất (2013), “Nghiên cứu ứng dụng ngƣời máy
trắc địa và phần mềm GOCA để quan trắc chuyển dịch công trình ở Việt
Nam”, Tuyển tập báo cáo Hội nghị Khoa học kỷ niệm 50 năm ngày thành
lập Viện KHCN Xây dựng (Phần 1: Địa kỹ thuật – Trắc địa công trình),
ISBN 978-604-82-0021-3. Nhà xuất bản Xây dựng, Hà Nội 11-2013.
7. Trần Ngọc Đông, Nguyễn Hà (2014), “Phƣơng pháp kiểm tra sai số vƣợt giới hạn
trong các trị đo quan trắc lún công trình”, Tạp chí KHCN Xây dựng số
1/2014, ISSN 1859-1566, Hà Nội.

125
TÀI LIỆU THAM KHẢO
Tiếng Việt
1. Thái Công Định và nnk (2004), Nghiên cứu xây dựng quy trình quan trắc địa
kỹ thuật và đo đạc phục vụ xây dựng công trình nhà cao tầng trên địa bàn
thành phố Hà Nội, Báo cáo đề tài cấp Sở (Sở Xây dựng Hà Nội), mã số
01C-04/04-2002.
2. Trần Ngọc Đông (2009), “Phân tích đánh giá kết quả quan trắc độ lún công
trình”, Tạp chí KHCN Xây dựng số 1/2009, Hà Nội.
3. Trần Ngọc Đông, Diêm Công Huy (2012), “Ứng dụng máy Toàn đạc điện tử
Leica Viva TS15 và phần mềm GOCA để tự động quan trắc biến dạng
tƣờng vây nhà cao tầng”, Tạp chí KHCN Xây dựng số 3/2012, Hà Nội.
4. Trần Ngọc Đông, Đoàn Đức Nhuận (2012), “Nghiên cứu sử dụng kết hợp toàn
đạc điện tử và Inclinometer để quan trắc chuyển dịch ngang tƣờng vây
công trình nhà cao tầng”, Tuyển tập báo cáo Hội nghị KH cán bộ trẻ - Viện
KHCN Xây dựng, Lần thứ 12, Hà Nội 11/2012.
5. Trần Ngọc Đông, Trần Mạnh Nhất (11/2013), “Nghiên cứu ứng dụng ngƣời
máy trắc địa và phần mềm GOCA để quan trắc chuyển dịch công trình ở
Việt Nam”, Tuyển tập báo cáo Hội nghị Khoa học kỷ niệm 50 năm ngày
thành lập Viện KHCN Xây dựng. Nxb Xây dựng, Hà Nội.
6. Hoàng Ngọc Hà (2006), Bình sai tính toán lưới trắc địa và GPS, Nxb Khoa
học và kỹ thuật, Hà Nội.
7. Phan Văn Hiến và nnk (1999), Trắc địa công trình, Nxb Giao thông Vận tải,
Hà Nội.
8. Ngô Văn Hợi và nnk (2004), Nghiên cứu xây dựng phần mềm chuyên dụng TĐCT
Ver 1.0, Báo cáo tổng kết đề tài cấp bộ (Bộ Xây dựng), Mã số RD10-03.
9. Ngô Văn Hợi và nnk (2005), Nghiên cứu ứng dụng công nghệ GPS và máy
Toàn đạc điện tử để quan trắc và đánh giá chuyển dịch ngang của các
công trình, Báo cáo tổng kết đề tài cấp bộ (Bộ Xây dựng), Mã số RD07-02.

126
10. Hoàng Thị Minh Hƣơng và nnk (2013), “Khảo sát phƣơng pháp xử lý lƣới
khống chế cơ sở trong quan trắc chuyển dịch ngang công trình”, Tuyển tập
báo cáo Hội nghị Khoa học kỷ niệm 50 năm ngày thành lập Viện KHCN
Xây dựng (Phần 1: Địa kỹ thuật – Trắc địa công trình), ISBN 978-604-82-
0021-3. Nhà xuất bản Xây dựng, Hà Nội 11-2013..
11. Nguyễn Bá Kế (2011), “Kinh nghiệm của nƣớc ngoài trong phòng tránh sự cố
công trình ở lân cận hố đào sâu trong đô thị”, Tạp chí người xây dựng số
tháng 3-2011, Hà Nội.
12. Nguyễn Bá Kế (2012), Xây dựng công trình ngầm đô thị theo phương pháp
đào mở, Nhà xuất bản Xây dựng, Hà Nội.
13. Trần Khánh (1991), Quy trình công nghệ quan trắc chuyển dịch biến dạng
công trình, Báo cáo đề tài nhánh trong đề tài cấp nhà nƣớc 46A-05-01.
14. Trần Khánh, Nguyễn Quang Phúc (2002), “Quan trắc độ lún công trình bằng
thiết bị đĩa từ”. Tuyển tập các công trình Khoa học, Đại học Mỏ -Địa chất,
tập 36, Hà Nội.
15. Trần Khánh (2004), “Khảo sát ảnh hƣởng sai số số liệu gốc và sai số hệ thống
trị đo đến kết quả quan trắc biến dạng công trình”, Tuyển tập các công
trình khoa học Mỏ - Địa chất, (4).
16. Trần Khánh (2010), Ứng dụng công nghệ mới trong trắc địa công trình, Nxb
Giao thông Vận tải, Hà Nội.
17. Trần Khánh, Nguyễn Quang Phúc (2010), Quan trắc chuyển dịch và biến dạng
công trình, Nxb Giao thông Vận tải, Hà Nội.
18. Nguyễn Quang Phúc (2000), “Dự báo lún công trình sau xây dựng dựa vào các
kết quả đo trắc địa”, Tạp chí KHCN Xây dựng, Tập 3 (112), Hà Nội.
19. Nguyễn Quang Phúc (2003), “Phân tích số liệu quan trắc chuyển dịch và biến
dạng công trình xây dựng”, Hội thảo khoa học một số vấn đề về đo đạc
trong xây dựng, Viện KHCN Xây dựng, Hà Nội.
20. Nguyễn Quang Phúc (2006), Nghiên cứu tối ưu hóa thiết kế hệ thống lưới
quan trắc chuyển dịch biến dạng công trình, Luận án tiến sĩ kỹ thuật,
Trƣờng Đại học Mỏ - Địa chất, Hà Nội.

127
21. Nguyễn Quang Phúc (2006), “Nghiên cứu hoàn thiện phần mềm xử lý số liệu
quan trắc lún công trình xây dựng”, Tạp chí KHKT Mỏ - Địa chất, (19).
22. Nguyễn Quang Phúc (2010), Nghiên cứu biến dạng công trình bằng phương
pháp trắc địa, Giáo trình Sau Đại học, Trƣờng đại học Mỏ - Địa chất, Hà Nội.
23. Nguyễn Văn Quảng (2006), Nền móng nhà cao tầng. Nhà xuất bản khoa học
và kỹ thuật.
24. Nguyễn Hồng Sơn (2010), Nghiên cứu hoàn thiện các giải pháp kỹ thuật đo đạc
và xử lý số liệu đo cao hình học trong quan trắc độ lún công trình dân dụng –
công nghiệp, Luận án tiến sĩ kỹ thuật, Trƣờng Đại học Mỏ - Địa chất, Hà Nội.
25. Nguyễn Tiến (2005), Giáo trình tự học lập trình Visual Basic.Net - Tập 1 –
Căn bản về lập trình Visual Basic.Net, Nxb Thống kê.
26. Nguyễn Tiến (2005), Giáo trình tự học lập trình Visual Basic.Net - Tập 2 -
Giao diện và đồ họa, Nxb Thống kê.
27. Hoàng Xuân Thành (2007), Nghiên cứu ứng dụng công nghệ mới trong quan
trắc chuyển dịch các công trình thủy lợi- thủy điện, Luận án tiến sĩ kỹ
thuật, Trƣờng Đại học Mỏ - Địa chất, Hà Nội.
28. Hoàng Xuân Thành, Bùi Thị Kiên Trinh (2010), “Nghiên cứu sử dụng kết hợp
phƣơng pháp trắc địa và địa kỹ thuật trong quan trắc chuyển dịch ngang
công trình Thủy lợi – Thủy điện”, Hội thảo khoa học Hệ thống thiết bị
quan trắc với chất lượng công trình. Nha Trang.
29. Lê Đức Tình (2012), Nghiên cứu giải pháp nâng cao hiệu quả công tác quan
trắc biến dạng công trình ở Việt Nam, Luận án tiến sĩ kỹ thuật, Trƣờng Đại
học Mỏ - Địa chất, Hà Nội.
30. Trần Viết Tuấn (2007), Nghiên cứu ứng dụng công nghệ GPS trong trắc địa
công trình ở Việt Nam, Luận án tiến sĩ kỹ thuật, Trƣờng Đại học Mỏ - Địa
chất, Hà Nội.
31. Nguyễn Cao Văn, Trần Thái Ninh (2002). Lý thuyết xác suất và thống kê toán.
Nhà xuất bản Giáo dục.

128
32. Đinh Xuân Vinh (2012). Nghiên cứu phương pháp quan trắc, xử lý số liệu và
phân tích biến dạng công trình công nghiệp - dân dụng trong điều kiện Việt
Nam, Luận án tiến sĩ kỹ thuật, Trƣờng Đại học Mỏ - Địa chất, Hà Nội.
33. Huang Sheng Xiang, Yin Hui, Jiang Zheng (Biên dịch: Phan Văn Hiến, Phạm
Quốc Khánh, hiệu đính Dƣơng Vân Phong), Xử lý số liệu quan trắc biến
dạng, Nhà xuất bản Khoa học và kỹ thuật, 2012.
34. TCVN 3972:1985, Công tác trắc địa trong xây dựng công trình.
35. TCVN 9360:2012, Quy trình kỹ thuật xác định độ lún công trình dân dụng và
công nghiệp bằng phương pháp đo cao hình học.
36. TCVN 9363:2012: Khảo sát cho xây dựng – Khảo sát địa kỹ thuật cho nhà
cao tầng.
37. TCVN 9364:2012, Nhà cao tầng – Kỹ thuật đo đạc phục vụ công tác thi công.
38. TCVN 9399:2012, Nhà và công trình xây dựng – Xác định chuyển dịch ngang
bằng phương pháp trắc địa.
39. (06/2011),
15 và phần mềm GOCA.
40. Phân Viện Địa kỹ thuật Miền Nam (10/2012), Báo cáo kết quả quan trắc lún
Nhà Văn phòng tại số 22-24-26 Mạc Thị Bƣởi, Quận 1, Tp. Hồ Chí Minh.
41. Viện kỹ thuật Xây dựng Hà Nội (10/2005), Báo cáo tổng hợp kết quả đo độ
lún công trình Trung tâm giao dịch và Tổng đài Nam Hà Nội.
42. Viện KHCN Xây dựng (06/2011), Báo cáo kết quả quan trắc thực hiện theo
nội dung Hợp đồng kinh tế số: 05/2011 VKH.
43. Viện KHCN Xây dựng (11/2011), Báo cáo kết quả quan trắc thực hiện theo
nội dung Hợp đồng kinh tế số: 05/2011 VKH.
44. Trung tâm tƣ vấn Trắc địa và Xây dựng – Viện KHCN Xây dựng (07/2013),
Báo cáo kết quả quan trắc chuyển dịch ngang tƣờng vây dự án Mở rộng trụ
sở Cục tần số vô tuyến điện, Hà Nội.

129
Tiếng Anh
45. Arne Bjerhammar (1973), Theory of errors and Generalized matrix
inverses, Elsevier scientific publishing company, Amsterdam – London
– New York 1973.
46. Anna siemińska- Lewandowska (2005), The displacements of anchored
diaphragm walls, Studia Geotechnica et Mechanica, Vol. XXVII, No.
1–2, 2005.
47. A.Rahman, M.Taha (2005), “Geotechnical performance of embedded cast-in-
situ diaphragm walls for deep excavations”, Slovak Journal of civil
engineering.
48. C.Y.Ou, J.T.Liao, W.L.Cheng (2000), Building Reponce and Ground
Movement induced by Deep Excavation .Geotechnique,50,N03,2000.
49. Bengt H. Fellenius (2012), Settelement of a Three – storey Apartment Building
on Piles.
50. Christian Moormann (2004), Analysis of Wall and Ground Movements due to
Deep Excavations in Soft Soil Based on A New Worldwide Databased. Soil
and Foundations, Japanese Geotechnical Society, Vol.44, No 1, Feb.
51. Changlin LUO (2007), Teaching of Automatic Measurement with Georobot,
School of Geodesy and Geomatics Wuhan University, May 15th
, 2007.
52. CHEN Zhi-jian, ZHANG Ning-ning, ZHANG Xiong-wen (2011), Settlement
monitoring system of pile - group foundation, Central South University
press and Springer-Verlag Berlin Heidelberg 2011.
53. C.Y. Ou and L.L. Yang (2011), “Observed Performance of Diaphragm Wall
Construction”. Geotechnical Engineering Journal of the SEAGS &
AGSSEA Vol.42 No.3 September 2011 ISSN 0046-5828.
54. Encardio – Rite electronics PVT.LTD (2011), Monitoring Diaphragm Wall
displacement & Associated ground movement.
55. Halim SETAN and Khairulnizam M. IDRIS, Malaysia (2008), “Automation in
Data Capture and Analysis for Industrial/Deformation Surveying Using
130
Robotic Total Station”. Integrating Generations FIG Working Week 2008
Stockholm, Sweden 14-19 June 2008.
56. Iva ALIŠIĆ, Loris REDOVNIKOVIĆ, Mira IVKOVIĆ (2011), “Application
of deformation analysis on the geodetic measurements”, INGEO 2011 – 5th
International Conference on Engineering Surveying Brijuni, Croatia,
September 22-24, 2011.
57. Lutes, J., A. Chrzanowski, G. Bastin, C. Whitaker (2001). “DIMONS
Software for automatic data collection and automatic deformation
analysis.” Proceedings of the 10th FIG International Symposium on
Deformation Measurements, Orange, California, 19-22 March, pp.101-109.
58. Lee DANISCH, Adam CHRZANOWSKI, Jason BOND, Maciej
BAZANOWSKI, (2008), “Fusion of geodetic and MEMS sensors for
integrated monitoring and analysis of deformations”. 13th
FIG Symposium
on Deformation Measurements and analysis, 4th
IAG Symposium on
Geodesy for Geotechnical and Structural Engineering, LNEC, Lisbon,
Portugal, 12-15 May.
59. Narong Thansnanipan, Aung Win Maung, Zaw Zaw Aye, Chanchai
Submaneewong, Thayanan Boonyarak (2006), “Construction of
Diaphragm Wall for Basement Excavation Adjacent to Tunnels in Bangkok
Subsoil”, International Symposium on Underground Excavation and
Tunnelling 2-4 February 2006, Bangkok, Thailand.
60. P.Erik Mikkelsen (2003), “Advances in Inclinometer Data Analysis‟,
Symposium on Field Measurement in Geomechanics, FMGM 2003, Oslo,
Norway, September.
61. Reiner Jäger, Simone Kälber, Manuel Oswald and Martin Bertges (2006),
“GNSS/GPS/LPS based Online Control and Alarm System (GOCA) -
Mathematical Models and Technical Realisation of a System for Natural
and Geotechnical Deformation Monitoring and Analysis”, 3rd
IAG / 12th
FIG Symposium, Baden, May 22-24, 2006.

131
62. Richard N. Hwang, Za-Chieh Moh, and C. H. Wang (2007), “Toe movements
of Diaphragm Wall and correction of Inclinometer readings”. Journal of
GeoEngineering, Vol. No.2, pp. 61-71, August 2007
63. Reiner Jäger, Simone Kälber, Irene Feldmeth, Manuel Oswald (2009), User
manual GOCA – Software, Version 4.1, November 2009.
64. US.Army Corps of enginners (2002), Structural Deformation Surveying.
65. Yunus Kalkan, Orhan Baykal, Reha Metin Alkan, Mustafa Yanalak and Turan
Erden (2002), “Deformation monitoring with geodetic and geotechnical method a
cause study in ambarli region.Methods: A case study in Ambarli Region”
International Symposium on GIS, September 23-26, 2002, Istanbul – Turkey.
66. Z.C.Moh, T. F. Song (1984), Performance of Diaphragm Walls in Deep
Foundation Excavations, International Conference on Case Histories in
Geotechnical Engineering May 6-11, 1984. University of Missouri – Rolla.
67. Won-Pyo Hong, Young-Suk Song, Jung-Mann Yun and Jung-Geun Han
(2004), Lateral Earth pressure and horizontal displacement of diaphragm
walls in multi-layered ground. Department of Civil and environmental
engineering, Chung-Ang university, KOREA
68. ASTM D6230 – 98 (2005), Standard Test Method for Monitoring Ground
Movement Using Probe – Type Inclinometers.
Tiếng Nga
69. Большаков В. Д., Гайдев П. А., (1977), Теория математической
обработки геодезических измерений, изд-во “Недра”, Москва.
70. Михелев Д. Ш. и др. (1977), Геодезические измерения при изучении
деформаций крупных инженерных сооружений, изд-во “недра”, Москва.
71. Пискунов М. Е. и др. (1980) Методика геодезических наблюдений за
деформациям сооружений, изд-во “недра”, Москва.
72. Новак В. Е. и др. (1981), Прикладная Геодезия, изд-во “недра”, Москва.
73. Панкрушин в.к. и др (1989), Математическая обработка и анализ
временных серий результатов наблюдений, НИИГАиК.

132
74. Маркузе Ю. И. (1989), Алгаритмы для уравнивания геодезических сетей
на ЭВМ, изд-во “недра”, Москва.
75. Ященко В.Р. (1989), Геодезические исследования вертикальных
движенний земной поверхности, изд-во “недра”, Москва.
76. Тамутис З.П. (1990), Проектирование Инженерных геодезических сетей,
изд-во “недра”, Москва.
77. Зайцев А. К. и др. (1991), Геодезические методы исследования
деформаций сооружения, изд-во “недра”, Москва.
78. Чан Хань, Нгуен Вьет Ха (2008), Анализ стабильности пунктов опорной
сети при наблюдении за горизонтальным смещением гидро-
технических сооружений во Вьетнаме, Журнал «Известия ВУЗов.
Геодезия и аэрофотосъемка, (5).
79. Михелев Д. Ш. и др. (2009), Инженерная Геодезия, 9-е издание, изд- во
“АСАDЕМА”, Москва.
Tiếng Trung
80. 上海市标准 - 基坑工程设计规程 (DBJ-61-97: Shanghai standard “code for
design of excavation engineering”.
81. 上海市深基坑工程管理暂行规定, 一九九八年九月十七日
82. 建筑基坑支护技术规程 (JGJ 120-99: Technical Specification for Retaining
and Protection of Building Foundation Excavations).
83. 中华人民共和国国家标准 -工 程 测 量 规 范 (GB50026-2007: Code for
engineering surveying).
Web
84. www.goca.info
85. www.geokon.com
86. www.slopeindicator.com

133
PHỤ LỤC

134
PHỤ LỤC A. SỐ LIỆU QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY
CÔNG TRÌNH 115 TRẦN DUY HƢNG, HÀ NỘI BẰNG PHƢƠNG PHÁP
TRẮC ĐỊA KẾT HỢP INCLINOMETER
Bảng A.1. Số liệu tọa độ gốc
Số
TT Tên điểm
Tọa độ
X (m) Y (m)
1 MC1 1000.0000 5000.0000
2 MC2 1000.0000 5043.4930
Bảng A.2. Số liệu góc đo của lưới khống chế cơ sở - Chu kỳ 1
Số
TT
Ký hiệu góc Góc đo chu kỳ 1
(14.06.2013)
(º ' ") Trái Giữa Phải
1 MC1 MC2 A 180 17 45.5
2 MC2 A B 70 36 56.2
3 A MC3 MC4 180 28 16.5
4 B A MC3 108 23 16.0
5 MC2 A MC3 179 00 08.0
Bảng A.3. Số liệu góc đo của lưới khống chế cơ sở - Chu kỳ 2
Số
TT
Ký hiệu góc Góc đo chu kỳ 2
(08.07.2013)
(º ' ") Trái Giữa Phải
1 MC1 MC2 A 180 17 41.6
2 MC2 A B1 68 58 53.5
3 A MC3 MC4 180 28 03.8
4 B1 A MC3 110 01 09.6
5 MC2 A MC3 179 00 05.2
Bảng A.4. Số liệu cạnh đo của lưới khống chế cơ sở - Chu kỳ 1
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 1
(14.06.2013)
(m) Ðầu Cuối
1 MC1 MC2 43.4930
2 MC2 A 42.7372
3 A B 29.1045
4 A MC3 32.8220
5 MC3 MC4 29.3890
6 B MC3 50.2710
7 B MC1 81.4180
8 B MC4 76.6360
9 A MC1 86.2280
10 A MC4 62.2125
11 B MC2 42.9852

135
Bảng A.5. Số liệu cạnh đo của lưới khống chế cơ sở - Chu kỳ 2
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 2
(08.07.2013)
(m) Ðầu Cuối
1 MC1 MC2 43.4930
2 MC2 A 42.7352
3 A B1 13.7110
4 A MC3 32.8225
5 MC3 MC4 29.3900
6 B1 MC3 39.6675
7 B1 MC1 82.3456
8 B1 MC4 68.1832
9 A MC1 86.2230
10 A MC4 62.2125
11 B1 MC2 39.9232
Bảng A.6. Số liệu góc đo của lưới quan trắc – Chu kỳ 1
Số
TT
Ký hiệu góc Góc đo chu kỳ 1
(14/06/2013)
(º ' ") Trái Giữa Phải
1 ICL5 B A 137 53 30.4
2 B A ICL4 41 49 09.5
3 ICL1 B A 82 24 36.0
4 ICL3 ICL4 ICL2 33 46 07.8
5 ICL2 ICL4 A 32 05 59.2
6 ICL4 ICL5 ICL2 40 01 58.3
Bảng A.7. Số liệu góc đo của lưới quan trắc – Chu kỳ 2
Số
TT
Ký hiệu góc Góc đo chu kỳ 2
(08/07/2013)
(º ' ") Trái Giữa Phải
1 ICL5 B1 A 155 25 49.3
2 B1 A ICL4 43 27 28.0
3 ICL1 B1 A 106 30 16.2
4 ICL3 ICL4 ICL2 33 45 24.7
5 ICL2 ICL4 A 32 06 06.9
6 ICL4 ICL5 ICL2 40 02 24.8

136
Bảng A.8. Số liệu cạnh đo của lưới quan trắc – Chu kỳ 1
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 1
(14.06.2013)
(m) Ðầu Cuối
1 B ICL5 17.1291
2 ICL5 A 43.3589
3 A ICL1 41.3132
4 A ICL4 71.5365
5 B ICL1 33.4178
6 B ICL2 43.4733
7 B ICL3 56.8013
8 B ICL4 53.4910
9 ICL5 ICL4 37.9946
10 ICL2 ICL3 13.9720
11 ICL2 ICL1 11.0670
12 ICL5 ICL2 34.5990
13 ICL5 ICL1 27.5955
14 ICL5 ICL3 45.9621
15 ICL3 A 65.6925
16 ICL4 ICL1 32.1211
17 ICL3 ICL4 21.9570
18 ICL4 ICL5 37.9939
19 ICL4 ICL2 25.0516

137
Bảng A.9. Số liệu cạnh đo của lưới quan trắc – Chu kỳ 2
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 2
(08.07.2013)
(m) Ðầu Cuối
1 B1 ICL5 30.5095
2 ICL5 A 43.3552
3 A ICL1 41.3155
4 A ICL4 71.5342
5 B1 ICL1 35.2722
6 B1 ICL2 46.3312
7 B1 ICL3 60.2942
8 B1 ICL4 62.2983
9 ICL5 ICL4 37.9836
10 ICL2 ICL3 13.9642
11 ICL2 ICL1 11.0672
12 ICL5 ICL2 34.5874
13 ICL5 ICL1 27.5855
14 ICL5 ICL3 45.9454
15 ICL3 A 65.6880
16 ICL4 ICL1 32.1162
17 ICL3 ICL4 21.9482
18 ICL4 ICL5 37.9845
19 ICL4 ICL2 25.0498

138
Bảng A.10. Kết quả tính chuyển dịch ngang tường vây đo bằng Inclinometer
Chuyển dịch vị trí ICL1 Chuyển dịch vị trí ICL2 Chuyển dịch vị trí ICL3
Độ
sâu
Chuyển dịch theo
hƣớng A
Chuyển dịch theo
hƣớng B
Độ
sâu
Chuyển dịch theo
hƣớng A
Chuyển dịch theo
hƣớng B
Độ
sâu
Số đọc đầu tiên Chuyển dịch (mm)
Số đọc
đầu tiên
Chuyển
dịch
(mm)
Số đọc
đầu tiên
Chuyển
dịch
(mm)
Số đọc
đầu tiên
Chuyển
dịch
(mm)
Số đọc
đầu tiên
Chuyển
dịch
(mm)
Số đọc
đầu
tiên
Chuyển
dịch
(mm)
Số đọc
đầu tiên
Chuyển
dịch
(mm)
6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013
0.5 0 3.78 0 0.04 0.5 0 1.30 0 0.07 0.5 0 0.83 0 0.04
1 0 3.58 0 0.04 1 0 1.29 0 0.06 1 0 0.83 0 0.04
1.5 0 3.40 0 0.04 1.5 0 1.26 0 0.05 1.5 0 0.81 0 0.04
2 0 3.24 0 0.05 2 0 1.25 0 0.07 2 0 0.80 0 0.05
2.5 0 3.01 0 0.06 2.5 0 1.17 0 0.09 2.5 0 0.79 0 0.06
3 0 2.83 0 0.06 3 0 1.10 0 0.07 3 0 0.79 0 0.06
3.5 0 2.61 0 0.04 3.5 0 1.10 0 0.05 3.5 0 0.78 0 0.04
4 0 2.38 0 0.05 4 0 1.05 0 0.04 4 0 0.76 0 0.05
4.5 0 2.13 0 0.07 4.5 0 0.96 0 0.06 4.5 0 0.74 0 0.08
5 0 1.91 0 0.06 5 0 0.91 0 0.05 5 0 0.71 0 0.06
5.5 0 1.75 0 0.04 5.5 0 0.79 0 0.04 5.5 0 0.70 0 0.04
6 0 1.63 0 0.02 6 0 0.66 0 0.04 6 0 0.70 0 0.03
6.5 0 1.47 0 0.00 6.5 0 0.56 0 0.01 6.5 0 0.66 0 0.00
7 0 1.29 0 0.00 7 0 0.46 0 0.01 7 0 0.55 0 0.00
7.5 0 1.05 0 0.01 7.5 0 0.39 0 0.02 7.5 0 0.39 0 0.01
8 0 0.84 0 0.04 8 0 0.30 0 0.06 8 0 0.26 0 0.04
8.5 0 0.59 0 0.05 8.5 0 0.25 0 0.04 8.5 0 0.24 0 0.05
9 0 0.42 0 0.05 9 0 0.18 0 0.02 9 0 0.21 0 0.05
9.5 0 0.34 0 0.06 9.5 0 0.15 0 0.00 9.5 0 0.17 0 0.06
10 0 0.26 0 0.05 10 0 0.13 0 0.00 10 0 0.16 0 0.05
10.5 0 0.17 0 0.02 10.5 0 0.09 0 0.05 10.5 0 0.14 0 0.03
11 0 0.09 0 0.01 11 0 0.08 0 0.09 11 0 0.09 0 0.01
11.5 0 0.04 0 0.01 11.5 0 0.05 0 0.07 11.5 0 0.04 0 0.01
12 0 0.05 0 -0.01 12 0 0.08 0 0.05 12 0 0.05 0 -0.01
12.5 0 0.05 0 0.00 12.5 0 0.08 0 0.05 12.5 0 0.05 0 0.00
13 0 0.06 0 0.01 13 0 0.06 0 -0.02 13 0 0.06 0 0.01
13.5 0 0.06 0 0.00 13.5 0 0.05 0 -0.07 13.5 0 0.06 0 0.00
14 0 0.05 0 -0.01 14 0 0.04 0 -0.09 14 0 0.05 0 -0.01
14.5 0 0.06 0 0.00 14.5 0 0.03 0 -0.07 14.5 0 0.06 0 0.00
15 0 0.05 0 -0.01 15 0 0.03 0 -0.05 15 0 0.05 0 -0.01
15.5 0 0.05 0 -0.01 15.5 0 0.08 0 -0.04 15.5 0 0.05 0 -0.01
16 0 0.04 0 -0.03 16 0 0.08 0 -0.09 16 0 0.04 0 -0.02
16.5 0 0.04 0 -0.03 16.5 0 0.06 0 -0.14 16.5 0 0.04 0 -0.02
17 0 0.04 0 0.01 17 0 0.04 0 -0.09 17 0 0.04 0 0.01
17.5 0 0.04 0 0.00 17.5 0 0.05 0 -0.06 17.5 0 0.04 0 0.00
18 0 0.02 0 0.00 18 0 0.05 0 -0.09 18 0 0.02 0 0.00
18.5 0 0.02 0 0.01 18.5 0 0.05 0 -0.06 18.5 0 0.02 0 0.01
19 0 0.02 0 0.01 19 0 0.04 0 -0.04 19 0 0.02 0 0.01
19.5 0 0.02 0 0.00 19.5 0 0.03 0 0.09 19.5 0 0.02 0 0.00
20 0 0.01 0 0.00 20 0 0.03 0 0.04 20 0 0.01 0 0.00
20.5 0 0.01 0 0.00 20.5 0 0.03 0 0.04 20.5 0 0.01 0 0.00
21 0 0.01 0 0.00 21 0 0.03 0 0.04 21 0 0.01 0 0.00
21.5 0 0.01 0 0.00 21.5 0 0.01 0 0.01 21.5 0 0.01 0 0.00
22 0 0.01 0 0.00 22 0 0.01 0 0.01 22 0 0.00 0 0.00
22.5 0 0.01 0 0.00 22.5 0 0.01 0 0.01 22.5 0 0.00 0 0.00
23 0 0.01 0 0.00 23 0 0.03 0 0.01 23 0 0.00 0 0.00
23.5 0 0.01 0 0.00 23.5 0 0.01 0 0.03 23.5 0 0.00 0 0.00
24 0 0.01 0 0.00 24 0 0.01 0 0.03 24 0 0.00 0 0.00
24.5 0 0.01 0 0.00 24.5 0 0.00 0 0.03 24.5 0 0.00 0 0.00
25 0 0.01 0 0.00 25 0 0.00 0 0.03
25.5 0 0.01 0 0.00 25.5 0 0.00 0 0.03
26 0 0.00 0 0.00 26 0 0.00 0 0.01
26.5 0 0.00 0 0.00 26.5 0 0.00 0 0.01
27 0 0.00 0 0.00 27 0 0.00 0 0.00
27.5 0 0.00 0 0.00 27.5 0 0.00 0 0.00

139
Bảng A.11. Kết quả tính chuyển dịch ngang tường vây đo bằng Inclinometer (tiếp theo)
Chuyển dịch vị trí ICL4 Chuyển dịch vị trí ICL5
Độ sâu
Chuyển dịch theo hƣớng A Chuyển dịch theo hƣớng B
Độ sâu
Chuyển dịch theo hƣớng A Chuyển dịch theo hƣớng B
Số đọc
đầu tiên
Chuyển dịch
(mm)
Số đọc
đầu tiên
Chuyển dịch
(mm)
Số đọc
đầu tiên
Chuyển dịch
(mm)
Số đọc
đầu tiên
Chuyển dịch
(mm)
6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013 6/14/2013 7/8/2013
0.5 0 5.11 0 0.09 0.5 0 7.85 0 0.11
1 0 4.79 0 0.09 1 0 7.51 0 0.11
1.5 0 4.57 0 0.10 1.5 0 7.23 0 0.10
2 0 4.54 0 0.11 2 0 7.19 0 0.11
2.5 0 4.81 0 0.12 2.5 0 7.38 0 0.13
3 0 5.21 0 0.12 3 0 7.71 0 0.13
3.5 0 5.65 0 0.10 3.5 0 8.15 0 0.10
4 0 6.52 0 0.11 4 0 9.00 0 0.11
4.5 0 6.87 0 0.14 4.5 0 9.31 0 0.14
5 0 7.25 0 0.12 5 0 9.66 0 0.13
5.5 0 7.45 0 0.10 5.5 0 9.83 0 0.10
6 0 7.61 0 0.09 6 0 9.93 0 0.09
6.5 0 7.80 0 0.06 6.5 0 10.06 0 0.06
7 0 7.34 0 0.06 7 0 9.51 0 0.06
7.5 0 6.77 0 0.05 7.5 0 8.88 0 0.05
8 0 6.26 0 0.07 8 0 8.13 0 0.06
8.5 0 5.69 0 0.05 8.5 0 7.41 0 0.04
9 0 4.95 0 0.02 9 0 6.64 0 0.05
9.5 0 4.26 0 0.04 9.5 0 5.76 0 0.02
10 0 3.61 0 0.02 10 0 4.95 0 0.00
10.5 0 2.96 0 0.04 10.5 0 4.09 0 0.01
11 0 2.29 0 0.02 11 0 3.15 0 0.01
11.5 0 1.64 0 0.02 11.5 0 2.27 0 0.01
12 0 1.16 0 0.00 12 0 1.70 0 -0.01
12.5 0 0.82 0 0.01 12.5 0 1.20 0 0.00
13 0 0.55 0 0.02 13 0 0.76 0 0.01
13.5 0 0.24 0 0.01 13.5 0 0.35 0 0.00
14 0 0.22 0 0.00 14 0 0.24 0 -0.01
14.5 0 0.24 0 0.01 14.5 0 0.25 0 0.00
15 0 0.22 0 0.00 15 0 0.24 0 -0.01
15.5 0 0.22 0 0.00 15.5 0 0.24 0 -0.01
16 0 0.21 0 -0.01 16 0 0.22 0 -0.03
16.5 0 0.21 0 -0.01 16.5 0 0.22 0 -0.03
17 0 0.21 0 0.03 17 0 0.21 0 0.01
17.5 0 0.21 0 0.01 17.5 0 0.21 0 0.01
18 0 0.20 0 0.01 18 0 0.20 0 0.01
18.5 0 0.20 0 0.03 18.5 0 0.20 0 0.02
19 0 0.19 0 0.03 19 0 0.19 0 0.02
19.5 0 0.19 0 0.01 19.5 0 0.19 0 0.01
20 0 0.17 0 0.00 20 0 0.16 0 0.00
20.5 0 0.17 0 0.01 20.5 0 0.16 0 0.01
21 0 0.19 0 0.03 21 0 0.17 0 0.02
21.5 0 0.24 0 0.04 21.5 0 0.22 0 0.04
22 0 0.21 0 0.05 22 0 0.20 0 0.05
22.5 0 0.17 0 0.06 22.5 0 0.16 0 0.06
23 0 0.11 0 0.04 23 0 0.10 0 0.04
23.5 0 0.10 0 0.04 23.5 0 0.09 0 0.04
24 0 0.07 0 0.04 24 0 0.06 0 0.04
24.5 0 0.06 0 0.03 24.5 0 0.05 0 0.03
25 0 0.01 0 0.03 25 0 0.00 0 0.03
25.5 0 0.02 0 0.00 25.5 0 0.01 0 0.00
26 0 0.01 0 -0.01 26 0 0.00 0 -0.01
26.5 0 0.02 0 0.00 26.5 0 0.01 0 0.00
27 0 0.00 0 0.00 27 0 0.00 0 0.00
27.5 0 0.00 0 0.00

140
PHỤ LỤC B: SỐ LIỆU QUAN TRẮC CHUYỂN DỊCH NGANG TƢỜNG VÂY
CÔNG TRÌNH GOLDEN PALACE CHU KỲ 01 VÀ 02
MC3
MC4
C¹nh líi khèng chÕ c¬ së
C¹nh líi quan tr¾c
§ên
g M
Ô T
r×
§ên
g M
Ô T
r×
QT1, QT2, ..., QT15: §iÓm quan tr¾c g¾n trªn ®Ønh têng v©y
MC1, MC2, MC3, MC4: §iÓm khèng chÕ c¬ së (mèc chuÈn)
P1, P2: §iÓm trung gian
MC1
MC2
P2
P1
QT7
QT5
QT6
QT9
QT8
QT10 QT11
QT12
QT13
QT14
QT15
QT1
QT2
QT3QT4
C¹nh ®o gi¸n tiÕp
Têng v©y
ChØ giíi ®êng ®á
Hình B.1. Sơ đồ hệ thống lưới quan trắc tường vây công trình Golden Palace
Bảng B.1: Số liệu tọa độ gốc
Số
TT Tên điểm
Tọa độ
X (m) Y (m)
1 MC1 5000.000 1000.000
2 MC2 5123.799 1000.000

141
Bảng B.2. Số liệu góc đo chu kỳ 01 và 02 của lưới khống chế cơ sở
Số
TT
Ký hiệu góc Góc đo chu kỳ 1
(29-30)/11/2012
(º ' ")
Góc đo chu kỳ 2
(29-30)/12/2012
(º ' ") Trái Giữa Phải
1 P1 P2 MC2 140 21 22.3 140 21 26.5
2 P2 MC2 MC1 45 53 41.5 45 53 48.0
3 MC2 MC1 P1 39 07 34.8 39 07 30.6
4 MC1 P1 P2 134 37 25.2 134 37 16.5
5 MC1 MC2 MC3 125 23 00.6 125 23 08.2
6 MC2 MC3 MC4 49 05 55.3 49 05 51.8
7 MC3 MC4 MC1 26 01 16.4 26 01 20.7
8 MC4 MC1 MC2 159 29 45.6 159 29 45.2
Bảng B.3. Số liệu cạnh đo chu kỳ 01 và 02 của lưới khống chế cơ sở
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 1
(29-30)/11/2012
(m)
Cạnh đo chu kỳ 2
(29-30)/12/2012
(m) Ðầu Cuối
1 MC2 MC3 40.2462 40.2450
2 MC3 MC4 187.5076 187.5060
3 MC2 MC4 164.0022 164.0032
4 MC3 MC1 150.7194 150.7210
5 MC2 MC1 123.7998 123.7990
6 MC2 P2 58.5420 58.5415
7 P1 MC1 71.4159 71.4186
8 P1 P2 27.8196 27.8192
9 P2 MC1 93.0877 93.0885
10 P1 MC2 81.9099 81.9100
11 MC1 MC4 42.2086 42.2055

142
Bảng B.4: Thành quả tọa độ bình sai lưới khống chế chu kỳ 1
Số
TT Tên điểm
Tọa độ Sai số vị trí điểm (m)
X (m) Y (m) Mx My Mp
1 P1 5055.4011 1045.0655 0.0008 0.0006 0.0010
2 P2 5083.0553 1042.0367 0.0008 0.0007 0.0010
3 MC3 5147.1040 967.1876 0.0006 0.0009 0.0011
4 MC4 4960.4650 985.2155 0.0009 0.0005 0.0011
5 MC1 4999.9996 1000.0000 0.0005 0.0000 0.0005
6 MC2 5123.7994 1000.0000 0.0005 0.0000 0.0005
Bảng B.5: Thành quả tọa độ bình sai lưới khống chế chu kỳ 2
Số
TT Tên điểm
Tọa độ Sai số vị trí điểm (m)
X (m) Y (m) Mx My Mp
1 P1 5055.4027 1045.0667 0.0008 0.0004 0.0009
2 P2 5083.0563 1042.0365 0.0007 0.0005 0.0009
3 MC3 5147.1039 967.1881 0.0007 0.0007 0.0009
4 MC4 4960.4657 985.2151 0.0009 0.0004 0.0010
5 MC1 4999.9978 999.9994 0.0006 0.0003 0.0007
6 MC2 5123.7983 999.9998 0.0005 0.0004 0.0007
Bảng B.6: Đánh giá độ ổn định của các mốc chuẩn và mốc trung gian
Số
TT Tên điểm
Ðộ lệch tọa độ (mm) Ðánh giá
qx qy q
1 P1 -1.4 -1.0 1.8 ổn định
2 P2 -0.8 0.3 0.9 ổn định
3 MC3 0.1 -0.4 0.5 ổn định
4 MC4 -0.7 0.4 0.8 ổn định
5 MC1 1.7 0.6 1.8 ổn định
6 MC2 1.2 0.2 1.2 ổn định
Ðộ lệch giới hạn: 4.8(mm)

143
Bảng B.7: Trị đo góc chu kỳ 01 và 02 của lưới quan trắc
Số
TT
Ký hiệu góc Góc đo chu kỳ 1
(29-30)/11/2012
(º ' ")
Góc đo chu kỳ 2
(29-30)/12/2012
(º ' ") Trái Giữa Phải
1 P2 QT7 QT8 126 39 42.2 126 39 32.5
2 QT13 QT14 QT15 179 42 03.0 179 41 46.5
3 QT3 QT2 QT1 139 32 40.2 139 32 32.0
4 QT2 QT3 QT4 108 12 39.2 108 11 46.5
5 P1 P2 QT7 59 35 44.2 59 35 47.5
6 P1 P2 QT5 176 35 06.2 176 35 10.8
7 QT5 QT6 QT7 162 58 10.0 162 57 52.3
8 QT9 P1 MC1 39 18 43.8 39 18 56.2
9 QT3 QT4 QT5 151 59 41.5 152 00 09.5
10 QT4 QT5 QT6 136 22 49.8 136 23 10.8
11 QT8 QT9 QT10 134 53 16.2 134 53 10.3
12 QT8 QT9 QT7 29 48 51.6 29 48 46.0
13 QT9 QT10 QT11 179 23 35.2 179 23 54.7
14 QT10 QT11 QT12 162 06 06.0 162 06 06.2
15 QT6 QT7 QT8 180 09 48.2 180 09 45.0
16 QT7 QT8 QT9 135 14 36.0 135 14 28.0
17 QT11 QT12 QT13 124 39 33.0 124 39 22.2
18 QT12 QT13 QT14 163 45 34.8 163 45 34.2
19 QT14 QT15 QT1 160 33 12.5 160 33 36.0
20 QT15 QT1 QT2 139 31 39.0 139 31 26.2

144
Bảng B.8: Trị đo cạnh chu kỳ 01 và 02 của lưới quan trắc
Số
TT
Ký hiệu cạnh Cạnh đo chu kỳ 1
(29-30)/11/2012
(m)
Cạnh đo chu kỳ 2
(29-30)/12/2012
(m) Ðầu Cuối
1 QT9 QT8 28.345 28.349
2 QT9 QT7 77.400 77.398
3 QT8 QT7 54.655 54.652
4 QT7 QT10 89.069 89.064
5 QT9 QT10 28.324 28.322
6 QT10 QT11 23.541 23.541
7 QT10 QT8 52.334 52.333
8 QT11 QT12 33.949 33.948
9 QT8 QT12 104.454 104.451
10 QT10 QT12 56.810 56.810
11 QT7 MC2 58.904 58.905
12 QT11 QT8 74.550 74.554
13 QT11 QT13 51.342 51.334
14 QT14 QT13 31.662 31.669
15 QT14 QT15 23.124 23.127
16 QT1 QT3 69.153 69.152
17 QT3 QT7 97.518 97.516
18 QT14 QT1 46.755 46.755
19 QT1 QT13 78.115 78.115
20 QT15 QT1 24.310 24.311
21 QT13 QT7 118.100 118.093
22 QT1 QT2 50.182 50.184
23 QT15 QT7 111.469 111.466
24 QT7 QT14 111.132 111.130
25 QT7 QT1 108.761 108.759
26 QT3 QT2 22.822 22.824
27 QT3 QT4 16.106 16.109
28 QT15 QT14 23.125 23.127
29 QT4 QT5 31.777 31.778
30 P2 QT2 64.696 64.694
31 QT2 QT5 51.740 51.738
32 QT5 QT6 26.058 26.055
33 QT4 QT7 89.717 89.720
34 QT5 QT7 67.329 67.331
35 QT4 QT6 53.734 53.738
36 QT6 QT7 41.984 41.985
37 P1 QT9 59.571 59.579
38 P1 QT8 44.119 44.118
39 QT12 QT13 23.777 23.776
40 QT9 MC1 45.455 45.455
41 QT8 MC1 29.918 29.917
42 MC1 QT7 75.009 75.011
43 MC2 QT6 27.575 27.576
44 P2 QT5 55.256 55.253
45 QT5 MC2 35.519 35.520
46 P2 QT7 20.848 20.852
47 P1 QT7 24.932 24.930
48 P1 QT12 97.360 97.362

145
Bảng B.9: Tọa độ và sai số vị trí điểm lưới quan trắc chu kỳ 01
Số
TT Tên điểm
Tọa độ Sai số vị trí điểm (m)
X (m) Y (m) Mx My Mp
1 QT1 5107.1484 1127.7478 0.0015 0.0010 0.0018
2 QT2 5132.1129 1084.2153 0.0013 0.0012 0.0018
3 QT3 5153.5984 1076.5174 0.0010 0.0012 0.0016
4 QT4 5153.1765 1060.4150 0.0009 0.0012 0.0015
5 QT5 5137.5260 1032.7598 0.0009 0.0004 0.0010
6 QT6 5112.5921 1025.1966 0.0012 0.0005 0.0013
7 QT7 5070.6091 1025.3113 0.0004 0.0004 0.0006
8 QT8 5015.9559 1025.3048 0.0008 0.0006 0.0010
9 QT9 4995.8265 1045.2593 0.0009 0.0004 0.0010
10 QT10 4995.7583 1073.5841 0.0009 0.0011 0.0015
11 QT11 4995.9511 1097.1227 0.0010 0.0012 0.0016
12 QT12 5006.6488 1129.3421 0.0013 0.0010 0.0017
13 QT13 5029.4717 1136.0124 0.0016 0.0009 0.0018
14 QT14 5061.1349 1136.0408 0.0018 0.0008 0.0020
15 QT15 5084.2598 1135.9407 0.0019 0.0009 0.0021
Bảng B.10: Tọa độ và sai số vị trí điểm lưới quan trắc chu kỳ 02
Số
TT Tên điểm
Tọa độ Sai số vị trí điểm (m)
X (m) Y (m) Mx My Mp
1 QT1 5107.1511 1127.7443 0.0019 0.0013 0.0023
2 QT2 5132.1150 1084.2116 0.0017 0.0015 0.0023
3 QT3 5153.6022 1076.5141 0.0013 0.0016 0.0020
4 QT4 5153.1769 1060.4121 0.0012 0.0015 0.0019
5 QT5 5137.5249 1032.7581 0.0011 0.0006 0.0013
6 QT6 5112.5909 1025.1935 0.0016 0.0006 0.0017
7 QT7 5070.6084 1025.3096 0.0005 0.0006 0.0007
8 QT8 5015.9576 1025.3057 0.0011 0.0007 0.0013
9 QT9 4995.8267 1045.2645 0.0011 0.0006 0.0013
10 QT10 4995.7613 1073.5848 0.0012 0.0015 0.0019
11 QT11 4995.9538 1097.1248 0.0014 0.0016 0.0021
12 QT12 5006.6498 1129.3409 0.0017 0.0014 0.0022
13 QT13 5029.4707 1136.0100 0.0021 0.0012 0.0024
14 QT14 5061.1378 1136.0377 0.0023 0.0011 0.0026
15 QT15 5084.2638 1135.9357 0.0024 0.0011 0.0027

146
PHỤ LỤC C. MỘT SỐ MÁY TOÀN ĐẠC ĐIỆN TỬ CÓ CHẾ ĐỘ BẮT MỤC TIÊU
TỰ ĐỘNG HIỆN NAY
Loại
máy
Hãng
sản xuất
Độ chính xác đo
Bắt mục tiêu Cạnh
- Có gƣơng
- Không gƣơng
Góc
TM30 LEICA
Thụy Sỹ
(0,6mm +1.10-6
D)
(2,0mm +2.10-6
D)
0,5" Tự động bắt mục tiêu (ATR)
(3000m với độ chính xác 7mm)
TM50 LEICA
Thụy Sỹ
(0,6mm +1.10-6
D)
(2,0mm +2.10-6
D)
0,5" Tự động bắt mục tiêu (ATR),
độ chính xác 0,5”
TS12 LEICA
Thụy Sỹ
(1,0mm +1,5.10-6
D)
(2,0mm +2.10-6
D)
1,0" Tự động bắt mục tiêu (ATR)
(1000m với độ chính xác 2mm)
TS15 LEICA
Thụy Sỹ
(1,0mm +1,5.10-6
D)
(2,0mm +2.10-6
D)
1,0" Tự động bắt mục tiêu (ATR)
(1000m với độ chính xác 2mm)
TS30 LEICA
Thụy Sỹ
(0,6mm +1.10-6
D)
(2,0mm +2.10-6
D)
0,5" Tự động bắt mục tiêu (ATR),
độ chính xác 1”
TS50
LEICA
Thụy Sỹ
(0,6mm +1.10-6
D)
(2,0mm +2.10-6
D)
0,5" Tự động bắt mục tiêu (ATR),
độ chính xác 0,5”
S8 Trimble
Mỹ
(1,0mm +1.10-6
D)
(3mm +2.10-6
D)
1,0" Tự động bắt mục tiêu
SRX1
SOKKIA
Nhật Bản
(1,5mm +2.10-6
D)
(3mm +2.10-6
D)
1,0" Tự động bắt mục tiêu
MS05A TOPCON
Nhật Bản
(0,8mm +1.10-6
D)
(1mm +1.10-6
D)
(100m)
0,5" Tự động bắt mục tiêu
MS1A TOPCON
Nhật Bản
(1,0mm +1.10-6
D)
(3mm +1.10-6
D)
1,0" Tự động bắt mục tiêu
Related Documents











