arXiv:1108.0296v2 [hep-th] 17 Aug 2011 LMU-ASC 29/11 MPP-2011-91 Nernst branes in gauged supergravity Susanne Barisch ∗,× , Gabriel Lopes Cardoso + , Michael Haack ∗ , Suresh Nampuri ∗ , Niels A. Obers † ∗ Arnold Sommerfeld Center for Theoretical Physics Ludwig-Maximilians-Universit¨ at M¨ unchen Theresienstrasse 37, 80333 M¨ unchen, Germany × Max-Planck-Institut f¨ ur Physik F¨ ohringer Ring 6, 80805 M¨ unchen, Germany + CAMGSD, Departamento de Matem´ atica Instituto Superior T´ ecnico, Universidade T´ ecnica de Lisboa Av. Rovisco Pais, 1049-001 Lisboa, Portugal † The Niels Bohr Institute Blegdamsvej 17, 2100 Copenhagen Ø, Denmark ABSTRACT We study static black brane solutions in the context of N =2 U (1) gauged supergravity in four dimensions. Using the formalism of first-order flow equations, we construct novel ex- tremal black brane solutions including examples of Nernst branes, i.e. extremal black brane solutions with vanishing entropy density. We also discuss a class of non-extremal generaliza- tions which is captured by the first-order formalism.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

arX
iv:1
108.
0296
v2 [
hep-
th]
17
Aug
201
1
LMU-ASC 29/11
MPP-2011-91
Nernst branes in gauged supergravity
Susanne Barisch∗,×, Gabriel Lopes Cardoso+, Michael Haack∗,
Suresh Nampuri∗, Niels A. Obers†
∗ Arnold Sommerfeld Center for Theoretical Physics
Ludwig-Maximilians-Universitat Munchen
Theresienstrasse 37, 80333 Munchen, Germany
× Max-Planck-Institut fur Physik
Fohringer Ring 6, 80805 Munchen, Germany
+ CAMGSD, Departamento de Matematica
Instituto Superior Tecnico, Universidade Tecnica de Lisboa
Av. Rovisco Pais, 1049-001 Lisboa, Portugal
† The Niels Bohr Institute
Blegdamsvej 17, 2100 Copenhagen Ø, Denmark
ABSTRACT
We study static black brane solutions in the context of N = 2 U(1) gauged supergravity
in four dimensions. Using the formalism of first-order flow equations, we construct novel ex-
tremal black brane solutions including examples of Nernst branes, i.e. extremal black brane
solutions with vanishing entropy density. We also discuss a class of non-extremal generaliza-
tions which is captured by the first-order formalism.

Contents
1 Introduction 1
2 First-order flow equations for extremal black branes 6
2.1 Flow equations in big moduli space . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Generalizations of the first-order rewriting . . . . . . . . . . . . . . . . . . . 13
2.2.1 Charge transformations . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Flux transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.3 Non-supersymmetric examples . . . . . . . . . . . . . . . . . . . . . . 15
2.3 AdS2 × R2 backgrounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Exact solutions 18
3.1 Solutions with constant γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1.1 The F (X) = −iX0X1 model . . . . . . . . . . . . . . . . . . . . . . . 18
3.1.2 The F = − (X1)3/X0 model: Interpolating solution between AdS4
and AdS2 × R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Solutions with non-constant γ . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1 The F = − iX0X1 model . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.2 The STU model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Nernst brane solutions in the STU model 30
5 Non-extremal deformation 33
A Special geometry 37
B First-order rewriting in minimal gauged supergravity 40
References 41
1 Introduction
Black holes play an important role as testing grounds for theories of quantum gravity. They
originally arise as solutions of the equations of classical gravitation which encapsulate regions
of space-time where the curvature becomes of the order of Planck length and classical grav-
itation breaks down. Thus, a quantum theory of gravity must be able to make statements
about these systems. Further, in classical gravitation, there is a correspondence between
physical observables that characterize the horizon of the black hole, such as its surface area
and the surface gravity, and thermodynamic quantities such as entropy and temperature,
and once this correspondence is made, the laws of black hole mechanics can be rewritten
as the laws of thermodynamics of black holes. Therefore, an essential requirement for any
quantum theory of gravity is that it has to be able to derive this correspondence from first
1

principles and more generally, derive the thermodynamics of black holes from a microscopic
statistical physical viewpoint. Hence, black hole thermodynamics and in particular questions
of microstate counting of black hole entropy have been an active area of research in string
theory.
Amongst these intriguing systems exists a subclass of black holes which pose extremely
interesting problems that have been the target of concentrated research in string theory.
These are a subset of charged black holes called extremal black holes. Charged black holes
arise as solutions of gravity coupled to gauge fields and in general can carry electric and
magnetic charge quantum numbers w.r.t. these gauge fields. Extremal black holes are charged
black holes that carry the minimum mass possible in the theory for a given set of charge
quantum numbers, and their mass is uniquely fixed in a given theory in terms of the charges
and the asymptotic values of the scalar fields. These are zero temperature black holes which
radically violate the third law of thermodynamics – the so called Nernst Law,1 which states
that the entropy of a thermodynamic system vanishes at zero temperature. Because these
black holes gravitationally attract matter, they reduce the entropy of the region of space-
time outside the horizon, and hence for consistency with the second law of thermodynamics,
they must have a corresponding increase in entropy. Hence these black holes have a very
high non-zero entropy at zero temperature. Some of the major successes in the study of the
statistical mechanics of black holes in string theory has been for this class of black holes. In
particular, their entropy can be given a statistical interpretation [2, 3] and exact formulae
for the microscopic degeneracies of extremal black holes are known for certain classes of
supersymmetric extremal black holes. These include black holes in N = 4 , D = 4 string
theory or N = 4 , D = 5 string theory (see [4, 5, 6, 7, 8]), and in N = 8 , D = 4 string
theory (see [9]).
Simultaneously, there is another critical way in which black holes play an essential role in
string theory. String theory naturally generates a beautiful and extremely powerful correspon-
dence between the dynamics of fields in gravitational backgrounds that are asymptotically
AdS and conformal field theories on the boundary of this AdS space. The AdS/CFT corre-
spondence implies the equality of the Hilbert spaces of the bulk theory and the field theory
at the boundary, whose operator content is defined by the boundary values of the bulk fields.
Hence every state in the bulk has a corresponding state in the field theory. Black holes
which are states in the bulk are represented as thermal ensembles in the dual field theory
at the same temperature as the black hole. The dynamics of bulk fields in the black hole
background therefore provides information on the interaction of the corresponding operators
in the thermal ensemble of the dual field theory. Since the AdS/CFT correspondence is a
strong-weak coupling duality, non-perturbative aspects of the boundary field theory can, in
principle, be understood in terms of perturbative calculations in gravity and vice versa.2
1The original Nernst heat theorem states that entropy changes go to zero at zero temperature. The strong
form of the law which states that entropy goes to zero at zero temperature was formulated by Max Planck,
for pure crystalline homogenous materials [1].2Incidentally, the AdS/CFT correspondence also lies at the heart of the entropy computation for extremal
2

A lot of effort has been put in applying this paradigm to extract information about field
theory systems from a gravitational perspective, recently specifically about those field theo-
ries that could underlie condensed matter physics, (for a comprehensive introduction to the
various aspects of this field see the reviews [13, 14, 15, 16, 17, 18]). One of the most interest-
ing and rich problems in such systems is the problem of understanding phase transitions. In
some important cases these are inaccessible to perturbative calculations on the field theory
side and as such offer a ready application ground to applying the principles of AdS/CFT
or, more generally, in applying knowledge of gravitational physics to the corresponding field
theory dual using gauge-gravity duality. Black holes play a vital role in this new application.
Amongst the most challenging classes of phase transitions are quantum critical phase
transitions which are phase transitions that occur in condensed matter systems at zero tem-
perature and which are driven by quantum fluctuations. In order to analyze these transitions
gravitationally, one must necessarily focus on the gravitational duals of zero temperature
thermal ensembles in field theory – the extremal black holes. Further, if one expects to find
results applicable to real condensed matter systems, these black holes must obey the usual
thermodynamic properties of condensed matter systems. All extremal black holes obey the
first two laws of thermodynamics and we therefore need to explore extremal black holes that
do not violate the third law. Hence finding these ’Nernst black holes’ is a relevant problem
with potentially rich implications. Smooth Nernst configurations in AdS have already been
found in [19, 20, 21].
Once we find a class of Nernst black holes, we need to have a systematic way of classifying
these objects. Phase transitions in field theory are classified by their universality classes and
distinguishing between various kinds of Nernst black holes could help in identifying those
relevant for a particular field theory. One way that suggests itself as a useful approach in
classification is in terms of a behavior that is uniquely exhibited by extremal configurations –
namely the attractor mechanism. This mechanism was discovered when studying uncharged
scalar fields in an extremal black hole background.3 In the absence of fluxes, the attractor
mechanism forces the values of the fields on the horizon to be independent of their asymptotic
values and fixes them solely in terms of the charges of the black hole. Hence the extremal
black hole horizon serves as a fixed point in moduli space (see [22, 23, 24, 25, 26, 27]).4
Therefore, classifying extremal black holes can be restated as classifying these fixed points in
moduli space and identifying any non-universality in the fixed point flow behavior.
The purpose of this paper is therefore to make a step towards addressing the analogous
problem in the presence of fluxes by studying static (black) brane solutions in the context
black holes in string theory: The leading order entropy of extremal black holes with a local AdS3 factor in
the near horizon geometry (arising from combining the usual AdS2 factor with an internal circle direction)
can be obtained by relating their Bekenstein-Hawking entropy to the Cardy-Hardy-Ramanujan formula for
the leading term in the entropy of a 2D CFT (see [10, 11, 12]).3The dynamics of these fields is encoded in a low-energy effective action arising from string theory.4In general there can also be flat directions in moduli space. However, the entropy of an extremal black
hole does not depend on the values of the moduli associated with these flat directions, so that it still makes
sense to view the extremal black hole horizon as a fixed point in moduli space.
3
of N = 2 U(1) gauged supergravity in four dimensions with only vector multiplets. Related
work on extending the attractor mechanism to the case with gaugings can be found in [28,
29, 30, 31, 32, 33, 34]. Our study starts with obtaining first-order flow equations for extremal
black branes, building on and extending recent work done in [30, 32, 33]. Using this, we
first study a number of new exact (non-Nernst) solutions both in the single scalar and STU
model. These include, in particular, generalizations of the (extremal limit) of a solution
recently discussed in the context of AdS/CMT in [35], as well as a solution that interpolates
between AdS4 and AdS2 × R2. We then show how our formalism can be used in the STU
model to find explicit examples of extremal black brane solutions in four dimensions with
vanishing entropy, which we denote as Nernst branes. We also show how the first-order
formalism can be extended to non-extremal solutions and we give examples thereof.
The paper is organized as follows. In section 2, we first study the equations of motion
governing the flow of the fields towards a fixed point, in the presence of fluxes. The presence
of a fixed point in moduli space basically halves the degrees of freedom and hence the flow
equations for the fields can be formulated as first-order ODEs. In four-dimensional ungauged
supergravity these equations were first constructed and solved for black holes in [26, 36]. In
the case of black holes in ungauged supergravity, the curvature of the horizon is positive and
inversely proportional to the square of the spherical radius of the horizon. A vanishing entropy
simply corresponds to a vanishing horizon size and a curvature larger than Planck scale
curvature, which clearly pushes these objects outside the regime of analysis of supergravity.
In general, for systems with a non-vanishing horizon curvature, classical supergravity analysis
applies when the radius of curvature is macroscopic w.r.t. both the Planck as well as the string
scales. In four dimensions, both these scales are related by the string coupling constant as
lp = gs ls. At the horizon, if the string coupling is fixed and the horizon does not encode
information about the quantum numbers of the internal states of the system, that is if it
has vanishing entropy, the string coupling value at the fixed point is a universal number
independent of charges and independent of its asymptotic value. For ’small’ black holes with
vanishing entropy, the string coupling constant is generally zero or infinite [37] and in either
case, for non-vanishing value of the dimensionfull curvature, the dimensionless curvature will
blow up in either string or Planck units. Hence, we should naturally turn towards black
objects with Ricci-flat horizons. These are black branes in string theory. In the absence
of fluxes, in an asymptotically flat space, black objects in D = 4 can have only a spherical
topology. Hence, we need to turn on fluxes to generate black branes in non-flat backgrounds.
In the presence of fluxes, extremal supersymmetric configurations in four dimensions were
first discovered by [30] and subsequently discussed in [32, 33]. The first-order formalism in
the presence of fluxes was first presented in [32]. There are significant differences in this
formalism vis-a-vis the ungauged case. The two most crucial ones being that there is a
symplectic constraint that restricts the choices of charges given the fluxes and secondly, the
phase of the effective ‘central’ charge (which we denote by γ) is no longer constant as in
the ungauged case, but is a dynamical quantity with an equation of its own. The first-order
formalism simply depends on the existence of fixed points in moduli space, and is independent
4

of whether the solutions being considered are supersymmetric or non-supersymmetric. Hence,
after re-deriving the supersymmetric first-order equations of [32], as a generalization, we
indicate how to develop a first-order equation for moduli flows in a non-supersymmetric
black brane background, and we give examples thereof. We demonstrate how the invariance
of the action under certain transformation operations on the fluxes can lead to alternative
first-order rewritings of the differential equations of flow. We finish this formalism section by
identifying the necessary conditions for the near-horizon geometry to be AdS2 × R2.
In section 3, we begin to explore the solution space of the first-order flow equations.
We first choose the simplest prepotential encoding one complex vector multiplet scalar field,
given by F = − iX0X1, and obtain a class of general fixed point solutions representing
non-Nernst black branes. These turn out to be generalizations of the solution discussed in
[35]. This serves as a consolidating check on the formalism. This solution, like an ungauged
solution, has a constant phase γ. As another example of a solution with constant γ, we show
a full numerical solution that interpolates between a near-horizon AdS2 × R2 geometry and
an asymptotic AdS4 geometry (for the prepotential F = − (X1)3/X0). We then proceed to
explore the possibility to have non-constant γ. So far we have only found local geometries
whose curvature and string coupling become large at some point. It might be possible,
though, that they describe the asymptotic region of a global solution once higher derivative
corrections are taken into account. It would be interesting to further investigate the existence
of well behaved solutions with non-constant γ, given that such solutions would be radically
different from the constant phase sector and have no counterpart in the ungauged case.
In section 4, we finally pursue the question of finding Nernst brane solutions. For this
purpose, we explore axion-free solutions of the fixed point flow equations in the STU model,
and write down a solution with constant γ and a fixed point at the zero of the radial coordi-
nate. At this point, the scalar that parametrizes the dilaton in the heterotic frame flows to
zero. Moreover, at this point, the metric has a coordinate singularity and the area density in
the constant time and constant radial coordinate hyperplane vanishes. The geometry near
this fixed point has an infinitely long radial throat which suppresses fluctuations in the scalar
fields such that their solutions become independent of their asymptotic values. We will take
this infinite throat property to mean that the solution is extremal, and the vanishing of the
area density to mean that the solution has zero entropy density. However, these solutions
asymptote to geometries that are not AdS4 and, thus, it is not clear which role they might
play in the gauge/gravity correspondence. Nevertheless, they are well behaved in that the
curvature invariants are finite. We end this section with a few comments on this Nernst brane
solution.
In section 5, we present a generalization of the first-order formalism to non-extremal black
branes and show how in certain cases, the moduli flow in these backgrounds can be encoded
in first-order equations.
5

2 First-order flow equations for extremal black branes
In the following, we will be interested in extremal black brane solutions of N = 2 U(1)
gauged supergravity in four dimensions with vector multiplets. First-order flow equations for
supersymmetric black holes and black branes were recently obtained in [32] by a rewriting of
the action, where they were given in terms of physical scalar fields zi = Y i/Y 0 (i = 1, . . . , n).
Here, we will re-derive them by working in big moduli space, so that the resulting first-order
flow equations will now be expressed in terms of the Y I . Also, we will not restrict ourselves
to supersymmetric solutions only. The formulation in big moduli space becomes particularly
useful when discussing the coupling to higher-derivative curvature terms [40].
2.1 Flow equations in big moduli space
Following [30, 32, 33] we make the ansatz for the black brane line element,
ds2 = −e2U dt2 + e−2U(
dr2 + e2ψ(dx2 + dy2))
, (2.1)
where U = U(r) , ψ = ψ(r). The black brane will be supported by scalar fields that only
depend on r.
The Lagrangian we will consider is given in (A.25). It is written in terms of fields XI of
big moduli space. The rewriting of this Lagrangian as a sum of squares of first-order flow
equations will, however, not be in terms of the XI , but rather in terms of rescaled variables
Y I defined by
Y I = eA XI = eA ϕXI . (2.2)
Here A = A(r) denotes a real factor that will be determined to be given by
A = ψ − U , (2.3)
while ϕ denotes a phase with a U(1)-weight that is opposite to the one of XI . Thus, XI =
ϕXI denotes a U(1) invariant variable so that
NIJ DrXI DrX
J = NIJ X′I ¯X ′J , (2.4)
where X ′I = ∂rXI . Observe that in view of (A.3),
e2A = −NIJ YI Y J , (2.5)
and that
e2AA′ = −12 NIJ
(
Y ′I Y J + Y I Y ′J)
, (2.6)
where we used the second homogeneity equation of (A.1).
We will first discuss electrically charged extremal black branes in the presence of electric
fluxes hI only, so that for the time being the flux potential (A.30) reads
V (X, ¯X) =(
N IJ − 2 XI ¯XJ)
hI hJ . (2.7)
6

Subsequently, we will extend the first-order rewriting to the case of dyonic charges as well as
dyonic fluxes.
We take F Itr = EI(r) as well as XI = XI(r). Inserting the line element (2.1) into the
action (A.25) yields the one-dimensional Lagrangian
L1d =√−g L−QI E
I , (2.8)
where L is given in (A.25) and the QI denote the electric charges. Extremizing with respect
to EI yields
− e2ψ−2U ImNIJ EJ = QI , (2.9)
and hence
EI = −e2U−2ψ[
(ImN )−1]IJ
QJ . (2.10)
The associated one-dimensional action reads,
− S1d =
∫
dr e2ψ{
U ′2 − ψ′2 +NIJ X′I ¯X ′J − 1
2 e2U−4ψ QI
[
(ImN )−1]IJ
QJ
+g2 e−2UV (X, ¯X)}
+
∫
drd
dr
[
e2ψ(
2ψ′ − U ′)
]
, (2.11)
in accordance with [32] for the case of black branes. Next, we rewrite (2.11) in terms of the
rescaled variables Y I . We also find it convenient to introduce the combination
qI = eU−2ψ+iγ(
QI − i g e2(ψ−U)hI
)
, (2.12)
where γ denotes a phase which can depend on r. Using
X ′I = e−A(
Y ′I −A′ Y I)
, (2.13)
as well as (2.6), we obtain the intermediate result
− S1d =
∫
dr e2ψ{
U ′2 − ψ′2
+e−2ANIJ
(
Y ′I − eAN IK qK) (
Y ′J − eANJL qL)
+(
A′ +Re[
XI qI
])2
−12 e
2U−4ψ QI
[
(ImN )−1]IJ
QJ − qI NIJ qJ −
(
Re[
XI qI
])2+ g2 e−2UV (X, ¯X)
}
+2
∫
dr e2ψ Re[
X ′I qI
]
+
∫
drd
dr
[
e2ψ(
2ψ′ − U ′)
]
. (2.14)
Next, using the identity,
− 12
[
(ImN )−1]
IJ = N IJ + XI ¯XJ + XJ ¯XI , (2.15)
7

as well as the explicit form of the potential (2.7), we obtain
− S1d =
∫
dr e2ψ{
U ′2 − ψ′2
+e−2ANIJ
(
Y ′I − eAN IK qK) (
Y ′J − eANJL qL)
+(
A′ +Re[
XI qI
])2
+2e2U−4ψ QIXI QJ
¯XJ −(
Re[
XI qI
])2− 2 g2 e−2U hI X
I hJ¯XJ}
+2
∫
dr e2ψ Re[
X ′I qI
]
+
∫
drd
dr
[
e2ψ(
2ψ′ − U ′)
]
. (2.16)
Inserting the expression (2.12) into the fourth line of (2.16) yields
2
∫
dr e2ψ Re[
X ′I qI
]
= 2
∫
drd
dr
[
eU Re(
eiγ XI QI
)
+ g e2ψ−U Im(
eiγ XI hI
)]
−2
∫
dr eU U ′ Re[
eiγ XI QI
]
−2 g
∫
dr e2ψ−U(
2ψ′ − U ′)
Im[
eiγ XI hI
]
(2.17)
+2
∫
dr γ′[
eU Im(
eiγ XI QI
)
− g e2ψ−U Re(
eiγ XI hI
)]
.
Combining the terms proportional to ψ′2 and to ψ′ into a perfect square, and the terms
proportional to U ′2 and to U ′ into a perfect square, yields
− S1d = SBPS + STD , (2.18)
where
SBPS =
∫
dr e2ψ{
[
U ′ − eU−2ψ Re(
eiγ XI QI
)
+ g e−U Im(
eiγ XI hI
) ]2
−(
ψ′ + 2 g e−U Im[
eiγ XI hI
])2(2.19)
+e−2ANIJ
(
Y ′I − eAN IK qK) (
Y ′J − eANJL qL)
+(
A′ +Re[
XI qI
])2+∆
}
,
and
∆ = 2[
eU−2ψ Im(
eiγ XI QI
)
− g e−U Re(
eiγ XI hI
)]
[
γ′ + eU−2ψ Im(
eiγ XI QI
)
+ g e−U Re(
eiγ XI hI
)]
. (2.20)
Finally,
STD =
∫
drd
dr
[
e2ψ(
2ψ′ − U ′)
+ 2eU Re(
eiγ XI QI
)
+ 2 g e2ψ−U Im(
eiγ XI hI
)]
.
(2.21)
Setting the squares in SBPS to zero gives
U ′ = eU−2ψ Re(
eiγ XI QI
)
− g e−U Im(
eiγ XI hI
)
,
ψ′ = −2 g e−U Im[
eiγ XI hI
]
,
A′ = −Re[
XI qI
]
,
Y ′I = eAN IK qK , (2.22)
8

while demanding the variation of ∆ to be zero yields
eU−2ψ Im(
eiγ XI QI
)
− g e−U Re(
eiγ XI hI
)
= 0 (2.23)
as well as
γ′ = −eU−2ψ Im(
eiγ XI QI
)
− g e−U Re(
eiγ XI hI
)
. (2.24)
Note that the first-order flow equations for the Y I and for A are consistent with one another:
the latter is a consequence of the former by virtue of (2.6).
Comparing the flow equations (2.22) with the ones obtained in the supersymmetric context
in [32] shows that the flow equations derived above are the ones for supersymmetric black
branes, and that the phase γ is to be identified with the phase α of [32] via γ′ = − (α′ +Ar),
with Ar given in (A.20).
Next, we study the dyonic case, with charges (QI , PI) and fluxes (hI , h
I) turned on. The
above results can be easily extended by first writing the term Q(ImN )−1Q in the action
(2.11) as
VBH = −12 QI
[
(ImN )−1]IJ
QJ
=(
N IJ + 2 XI ¯XJ)
QI QJ
= gij DiZ DjZ + |Z|2 , (2.25)
where we used (A.29) to write VBH in terms of Z = −QI XI . Turning on magnetic charges
amounts to extending Z to [24]
Z = P I FI −QI XI =
(
P I FIJ −QJ)
XJ = −QI XI , (2.26)
where
QI = QI − FIJ PJ . (2.27)
Similarly, the flux potential with dyonic fluxes can be obtained from the one with purely
electric fluxes by the replacement of hI by
hI = hI − FIJ hJ , (2.28)
cf. (A.30).
Thus, formally the action looks identical to before, and we can adapt the computation
given above to the case of dyonic charges and fluxes by replacing QI and hI with QI and hI .
Performing these replacements in (2.12) as well yields
qI = eU−2ψ+iγ(
QI − i g e2(ψ−U)hI
)
. (2.29)
The above procedure results in
− S1d = SBPS + STD + Ssympl , (2.30)
9

where SBPS and STD are given as in (2.19) and (2.21), respectively, with QI and hI replaced
by QI and hI , and with qI now given by (2.29). The third contribution, Ssympl, is given by
Ssympl = g
∫
dr(
QI hI − P I hI
)
. (2.31)
Observe that this term is constant, independent of the fields, and hence it does not contribute
to the variation of the fields. Imposing the constraint S1d = 0 (which is the Hamiltonian
constraint, to be discussed below) on a solution yields the condition
QI hI − P I hI = 0 , (2.32)
in agreement with [32] for the case of black branes. The condition (2.32) can also be written
as
Im(
QI NIJ ¯hJ
)
= 0 . (2.33)
The flow equations are now given by
U ′ = eU−2ψ Re[
eiγ XI QI
]
− g e−U Im[
eiγ XI hI
]
,
ψ′ = −2 g e−U Im[
eiγ XI hI
]
,
A′ = −Re[
XI qI
]
,
Y ′I = eAN IJ qJ ,
γ′ = eU−2ψIm(
eiγ Z)
+ g e−URe(
eiγ W)
, (2.34)
where Z and W denote Z and W with X replaced by X, as in (A.31). Inspection of the flow
equations (2.34) yields
A′ = (ψ − U)′ , (2.35)
and hence we obtain (2.3) (without loss of generality).
Observe that, as before, the flow equations for A and Y I are consistent with one another.
The latter can be recast into(
(Y I − Y I)′
(FI − FI)′
)
= −2i e−ψ Im
(
eiγ N IK QK
eiγ FIK NKJ QJ
)
+ 2i g eψ−2U Re
(
eiγ N IK hK
eiγ FIK NKJ hJ
)
,(2.36)
where here FI = ∂F (Y )/∂Y I . Each of the vectors appearing in this expression transforms as
a symplectic vector under Sp(2(n + 1))transformations, i.e. as
(
Y I
FI
)
→(
U IJ ZIJ
WIJ VIJ
)(
Y J
FJ
)
, (2.37)
where UT V −W T Z = I. For instance, under symplectic transformations,
N IJ ¯hJ → SIK NKL ¯hL , FIJ →(
VIL FLK +WIK
)
[S−1]KJ , (2.38)
where SIJ = U IJ +ZIK FKJ [38]. Using this, it can be easily checked that the last vector in
(2.36) transforms as in (2.37).
10

The constraint (2.23) becomes
eU−2ψ Im(
eiγ Z(Y ))
− g e−U Re(
eiγW (Y ))
= 0 , (2.39)
where
Z(Y ) = P I FI(Y )−QI YI ,
W (Y ) = hI FI(Y )− hI YI . (2.40)
Using the flow equations (2.34), we find that the constraint (2.39) is equivalent to the condi-
tion
qI YI = qI Y
I . (2.41)
The phase γ is not an independent degree of freedom. It can be expressed in terms of
Z(Y ) and W (Y ) as [32]
e−2iγ =Z(Y )− ig e2(ψ−U)W (Y )
Z(Y ) + ig e2(ψ−U) W (Y ). (2.42)
When γ = kπ (k ∈ Z), equation (2.42) implies
Z(Y ) = Z(Y ) , W (Y ) = −W (Y ) . (2.43)
Differentiating (2.39) with respect to r yields a flow equation for γ′ that has to be consis-
tent with the last flow equation in (2.34). We proceed to check consistency of these two flow
equations. Multiplying (2.39) with exp (2ψ − U) and differentiating the resulting expression
with respect to r yields
Im[
i qI YI(
γ′ − 2g e−ψ eiγW (Y )) ]
= 0 , (2.44)
where we used the flow equations for Y I and for (ψ − U). Using (2.41), this results in
γ′ = 2g e−ψ Re[
eiγW (Y )]
, (2.45)
which, upon using (2.39), equals the flow equation for γ given in (2.34). Thus, we con-
clude that upon imposing the constraint (2.39), the flow equation for γ′ given in (2.34) is
automatically satisfied.
Summarizing, we obtain the following independent flow equations. Since e2A is expressed
in terms of Y I , it is not an independent quantity, cf. (2.5). Since U = ψ − A on a solution,
U is also not an independent quantity. The independent flow equations are thus
ψ′ = 2 g e−ψ Im[
eiγW (Y )]
,
Y ′I = eψ−U N IK qK , (2.46)
with qK given in (2.29) and with γ given in (2.42) (observe that the latter is, in general, r-
dependent). In addition, a solution to these flow equations has to satisfy the reality condition
(2.41) as well as the symplectic constraint (2.32). The flow equations for the scalar fields Y I
can equivalently be written in the form (2.36). Observe that in view of (2.5) and (2.41), the
11

number of independent variables in the set (U,ψ, Y I) is the same as in the set (U,ψ, zi =
Y i/Y 0), which was used in [32]. Indeed, the flow equations (2.46) are equivalent to the ones
presented there and, thus, they describe supersymmetric brane solutions.
Observe that the right hand side of the flow equations (2.46) may be expressed in terms
of the Y I only by redefining the radial variable into ∂/∂τ = eψ ∂/∂r, in which case they
become
∂ψ
∂τ= 2 g Im
[
eiγW (Y )]
,
∂Y I
∂τ= e−iγ N IK
(
¯QK + i g e2A
¯hK
)
, (2.47)
with A expressed in terms of the Y I according to (2.5).
Let us now discuss the Hamiltonian constraint mentioned above. For a Lagrangian density√−g ( 1
2R + LM ) it is given by the variation of the action w.r.t. g00 as
12R00 +
δLMδg00
− 12 g00
(
12R + LM
)
= 0 . (2.48)
Using the matter Lagrangian (A.25) as well as the metric ansatz (2.1), and replacing the
gauge fields by their charges, as in (2.10), gives
e2ψ{
U ′2 − ψ′2 + NIJ XI′ ¯XJ ′ + g2 e−2U Vtot(X,
¯X)}
+[
e2ψ (2ψ′ − 2U ′ )]′
= 0 , (2.49)
where Vtot denotes the combined potential
Vtot(X,¯X) = g2 V (X, ¯X) + e−4A VBH(X,
¯X)
= g2[
N IJ ∂IW∂J¯W − 2|W |2
]
+ e−4A[
N IJ ∂I Z∂J¯Z + 2|Z|2
]
. (2.50)
The Hamiltonian constraint (2.49) can now be rewritten (up to a total derivative term) as
LBPS + Lsympl = 0 , (2.51)
where LBPS and Lsympl denote the integrands of (2.19) (with the charges and fluxes replaced
by their hatted counterparts) and (2.31), respectively. Since LBPS = 0 on a solution to the
flow equations, it follows that the Hamiltonian constraint reduces to the symplectic constraint
(2.32). The total derivative term vanishes by virtue of the flow equation for A = ψ − U .
In the following, we briefly check that (2.36) reproduces the standard flow equations for
supersymmetric domain wall solutions in AdS4. Setting QI = P I = 0, and choosing the
phase γ = π/2, we obtain ψ = 2U , A = U as well as(
(Y I − Y I)′
(FI − FI)′
)
= i g
(
hI
hI
)
, (2.52)
which describes the supersymmetric domain wall solution of [39]. Observe that the choice
γ = 0 leads to a solution of the type (2.52) with the imaginary part of (Y I , FI)′ replaced by
the real part. The flow equations (2.52) can be easily integrated and yield(
Y I − Y I
FI − FI
)
= i g
(
HI
HI
)
= i g
(
αI + hI r
βI + hI r
)
, (2.53)
12

where (αI , βI) denote integration constants. This solution satisfies W (Y ) = W (Y ), which is
precisely the condition (2.39). In addition, using (2.5), we obtain e2U = g(
HI FI(Y )−HI YI)
.
2.2 Generalizations of the first-order rewriting
In the preceding section the first order rewriting was done for a general prepotential. In mi-
nimal gauged supergravity other first order rewritings are possible. For a detailed discussion
see appendix B. Moreover, in the first-order rewriting performed above, what was used
operationally was the fact that i) for an arbitrary charge and flux configuration the 1-D bulk
Lagrangian can be written as a sum of squares and ii) imposing the symplectic constraint
(2.32), the vanishing of the squares gives a vanishing bulk Lagrangian, which in turn is equal
to the Hamiltonian density. This ensures that both the equations of motion as well as the
Hamiltonian constraint are satisfied. Given this procedure, we may identify invariances of
the action under transformations of the charges and/or fluxes, since any such transformation
will automatically produce a new, possibly physically distinct, rewriting of the action.
In the ungauged case in four dimensions this has been already explored in terms of an
S-matrix that operates on the charges, while keeping the action invariant [41].5 In the gauged
case, the presence of both charges and fluxes allows for a wider class of transformations, in
which both sets of quantum numbers are transformed. Thus finding transformations on both
charges and fluxes that leave the action invariant allows for more general rewritings. Here we
illustrate this with two possible types of transformations, one based on charge transformations
and the other on fluxes. It is in principle also possible to find combinations thereof, but we
do not attempt to do so explicitly.
2.2.1 Charge transformations
The combined potential (2.50) arising in the 1-D action consists of a sum of two positive
definite terms, one associated with charges and the other one with fluxes. The part arising
from charges can be written as
VBH = −12QTMQ , (2.54)
where Q = (P I , QI) and the symplectic matrix M takes the form (following the notation of
[41])
M = IM , M =
(
D C
B A
)
, I =
(
0 −I
I 0
)
(2.55)
with
A = −DT = ReN (ImN )−1 , C = (ImN )−1 , B = − ImN − ReN (ImN )−1 ReN .
(2.56)
Note that M2 = −I. Given a matrix S that transforms the charge vector Q to Q′ = SQ and
obeying STMS = M the charge potential remains invariant. Moreover, if in addition we
5See also [42] for related transformations in five dimensions.
13

choose a set of fluxes H = (hI , hI) such that their symplectic product (2.32) with the charges
remains invariant,
HTIQ = HTISQ , (2.57)
then the 1-D action (2.51) remains invariant. Consequently, the same action can have two
different rewritings, one being the usual supersymmetric rewriting in terms of the original
charges and fluxes and the other being a rewriting in terms of the new ’S-transformed’ charges
and old fluxes. Since the latter rewriting is distinct from the original supersymmetric one, it
would necessarily be non-supersymmetric.
In further detail, if one furthermore assumes that S is symplectic, it was shown in [41]
that the invariance of (2.54) implies that it needs to satisfy
[S,M ] = 0 (2.58)
with M defined in (2.55). In the present case with gauging, one needs to require in addition
(2.57). A sufficient condition for this is that H = S H so that S leaves the flux vector
unchanged [41]. This shows that one can generically satisfy this condition by choosing a
matrix S that only mixes non-zero charges (in the original configuration) and by only turning
on fluxes that are dual to those charges that are set to zero.
Examples of the S-matrix and charge and flux configurations satisfying the conditions
stated above will be given in section 2.2.3 below. Explicit rewritings for a constant S-matrix
in the ungauged case were given in [41] for the 4-D case and in [42] for 5-D. In particular, in
the 4-D case a constant S-matrix implies that one can define a new “fake superpotential” that
gives rise to the same black hole potential as Z. It must be noted that though in principle
one can construct non-constant S-matrices that are field dependent and which satisfy these
criteria, for the purpose of first-order rewriting, it is non-trivial to employ these matrices
since their derivatives then appear in the action so that the squaring technique in the action
becomes highly involved. We will only give explicit examples of the equations in the case of
a constant S-matrix.
2.2.2 Flux transformations
There are two distinct types of flux transformations that leave the action invariant and can
hence be used to generate new solutions.
The first one is in spirit analogous to the charge transformation discussed above. One
may write the flux potential (A.30) as
Vg = HT LH (2.59)
with H = (hI , hI) and the matrix L given by
L =
(
FT F −FT−T F T
)
(2.60)
14

in terms of FIJ and the matrix
T IJ = N IJ − 2XIXJ . (2.61)
Note that we thus have (FT )IJ = FIKT
KJ , (T F )IJ = T IKFKJ , (FT F )IJ = FIKTKLFLJ .
We now look for transformations on the fluxes H → H′ = RH that leave the flux potential
invariant, i.e. RTLR = L as well as the symplectic constraint HTIQ = HTRTIQ. This
is a new feature of the gauged case, examples of which will be given in section 2.2.3. Note
that if one finds an S-matrix transforming the charges and an R-matrix transforming the
fluxes, that simultaneously keep the symplectic constraint fixed, it is possible to perform a
non-supersymmetric rewriting with both transformed charges and fluxes.
A second possibility, which is more model-dependent, occurs if there is a flux configuration
h∗ that contributes vanishingly to the flux potential Vg = hI (NIJ − 2XI XJ )
¯hJ , cf. [43].
6
If, in addition, the charges that are symplectically dual to the fluxes in h∗ are not turned on,
then this flux vector becomes a flat direction in flux space. This means that for a given 1-D
action one can introduce these starred fluxes by adding a null term to the action as well as
the Hamiltonian, while not affecting the symplectic constraint. Then a new rewriting of the
action can be implemented with the old charges but the fluxes changed by the addition of
the corresponding h∗. An example of this arises in the STU model where a candidate h∗ is
simply the flux configuration with only h0 turned on. One can then easily show that
(h+ h∗)I TIJ (h+ h∗)J = hI T
IJhJ . (2.62)
Hence the replacement h→ h+ h∗ can be made in the action, provided the charge P 0 is not
turned on, and a new rewriting can be achieved. Note that this type of rewriting satisfies the
supersymmetry equations and is hence also supersymmetric. Note also that higher derivative
corrections will almost certainly lift this apparent degeneracy in solution space. Finally, this
new rewriting technique could be combined with the two previous ones for appropriate charge
and flux configurations to achieve further rewritings.
2.2.3 Non-supersymmetric examples
As an illustration of the transformations discussed above, we now give several examples in
the two particular models for which we later in sections 3 and 4 obtain new extremal black
brane solutions. The transformations below (along with other examples one might wish to
construct) can thus be used to generate non-supersymmetric extremal black brane solutions
from these.
We start with the F (X) = −iX0X1 model. In this case one can compute a constant
(symplectic) S-matrix satisfying (2.58) (see eq. (4.8) of [41]),
S =
(
− cos θσ3 −i sin θσ2i sin θσ2 − cos θσ3
)
, (2.63)
6We thank Stefanos Katmadas for pointing this out to us.
15

with σa the standard Pauli matrices. One may then for example choose θ = 0 (or θ = π).
The matrix S then becomes block-diagonal and we can ensureH = S H (and, thus, (2.57)) by
taking non-zero Q0, Q1 and h1 (or h0), or non-zero P0, P 1 and h1 (or h0). Then the solution
with Q → Q′ = S Q is non-supersymmetric.
It is also possible to find R-matrices mixing the fluxes. Here we content ourselves with
giving a field dependent example of a matrix R fulfilling RTLR = L. For this one needs Lin (2.60) which, together with (A.2), can be computed using that the matrices T and F are
given by
T = −1
2
[
1Re z 1 + z
Re z
1 + zRe z
|z|2
Re z
]
, F =
0 −i
−i 0
, (2.64)
with z = X1/X0. As an example, we take R to be block diagonal in electric/magnetic fluxes.
We find the solution
R =
(
A 0
0 A
)
, A =i√3
(
−1− zRe z − 1
Re z|z|2
Re z 1 + zRe z
)
, AIJ = |ǫIKǫJL|AKL , (2.65)
where ǫIK is the 2-dimensional Levi-Civita-symbol. For this type of R-matrix we can then
satisfy the symplectic constraint invariance by either taking the electric charges QI non-zero
accompanied by non-zero fluxes hI or magnetic charges P I together with fluxes hI . There
are many further possible R-matrices that can be constructed, mixing electric and magnetic
charges, even containing arbitrary parameters.
We also comment on possible S- and R-matrices in the STU-model. A constant (sym-
plectic) S-matrix satisfying (2.58) was constructed in [41],
S = diag(ǫ0, ǫ1, ǫ2, ǫ3, ǫ0, ǫ1, ǫ2, ǫ3) , ǫI = ±1 (2.66)
Without any details of the computation, we also note that it is possible to find corresponding
R-matrices mixing the fluxes. A simple example in the case of purely imaginary S = X1/X0,
T = X2/X0 and U = X3/X0 is
R =
(
A 0
0 AT
)
, A =
(
I2 0
0 B
)
, B =
(
0 T2U2
U2T2
0
)
, (2.67)
where T2 = ImT and U2 = ImU . It is not difficult to find charge/flux configurations that
have the property that R acts non-trivially on the fluxes, while at the same time leaving the
symplectic constraint invariant.
2.3 AdS2 × R2 backgrounds
In the following, we will consider space-times of the type AdS2 × R2, i.e. line elements (2.1)
with constant A. In view of the relation (2.5), we thus demand that the Y I are constant
in this geometry. Observe that the latter differs from the case of black holes in ungauged
supergravity. There, the appropriate Y I variable is not given in terms of (2.3), but rather
16

in terms of A = −U , and the associated flow equations are solved in terms of Y I = Y I(r)
rather than in terms of constant Y I .
For constant Y I , their flow equation yields qI = 0, which implies QI = i g e2A hI . Inserting
this into the flow equation for U gives
eA(eU )′ = −2g Im[
eiγ Y I hI
]
, (2.68)
which equals (eψ)′. Hence we obtain ψ′ = U ′, which is consistent with A = ψ−U = constant.
Combining the flow equations (2.45) and (2.68) gives
eA(
eU−iγ)′= 2 i g Y I hI = constant , (2.69)
which yields
eA eU−iγ = 2 i g Y I hI r + c , c ∈ C . (2.70)
It follows that
eA eU = Re[
2 i g eiγ Y I hI r + c eiγ]
= −2 g Im[
eiγ Y I hI
]
r +Re[
c eiγ]
. (2.71)
Now recall that γ is given by (2.42), which takes a constant value, since the Y I are constant.
Hence Re[
c eiγ]
is constant, and it can be removed by a redefinition of r, resulting in
eA+U = −2 g Im[
eiγ Y I hI
]
r . (2.72)
Observe that Im[
eiγ Y I hI
]
6= 0 to ensure that the space-time geometry contains an AdS2
factor.
Contracting QI = i g e2A hI with Y I yields the value for e2A as
e2A = −i YI QI
g Y J hJ= −i Z(Y )
gW (Y )= i
Z(Y )
g W (Y ), (2.73)
and hence
QI =Z(Y )
W (Y )hI . (2.74)
The values of the Y I are, in principle, obtained by solving (2.74), or equivalently,
QI − 12(FIJ + FIJ)P
J = 12g e
2ANIJhJ ,
−12NIJ P
J = g e2A(
hI − 12(FIJ + FIJ)h
J)
. (2.75)
There may, however, be flat directions in which case some of the Y I remain unspecified, and
an example thereof is given in section 3. The reality of e2A forces the phases of Z(Y ) and of
W (Y ) to differ by π/2 [32].
This relation (2.74) has an immediate consequence, similar to the one for black holes
derived in [32]. Namely, using (2.74) and (2.73) in (2.33) leads to
0 = Im
(
Z(Y )
W (Y )hIN
IJ ¯hJ
)
= Im(
i g e2A hINIJ ¯hJ
)
= g e2A hINIJ ¯hJ . (2.76)
17

Given that g e2A 6= 0, we infer that for any AdS2 × R2 geometry
hINIJ ¯hJ = 0 . (2.77)
We will use this fact below in section 3.1.2.
3 Exact solutions
In the following, we consider exact (dyonic) solutions of the flow equations in specific models.
In general, solutions fall into two classes, namely solutions with constant γ and solutions with
non-constant γ along the flow.
3.1 Solutions with constant γ
Let us discuss dyonic solutions in the presence of fluxes. For concreteness, we choose γ = 0
in the following. The flow equations (2.34) for U,ψ and A read,
(eU )′ = e−3A Re[
Y I QI
]
− g e−A Im[
Y I hI
]
,
(eψ)′ = −2 g Im[
Y I hI
]
,
(eA)′ = −Re[
Y I qI]
, (3.1)
while the flow equations for the Y I are(
(Y I − Y I)′
(FI − FI)′
)
= 2i e−ψ
[
− Im
(
N IK QK
FIK NKJ QJ
)
+ g e2A Re
(
N IK hK
FIK NKJ hJ
)]
. (3.2)
In the presence of both fluxes and charges, the flow equations (3.2) cannot be easily integrated.
A simplification occurs whenever ReFIJ = 0. This is, for instance, the case in the model
F = −iX0X1, to which we now turn.
3.1.1 The F (X) = −iX0X1 model
For this choice of prepotential, we have F (X) = (X0)2 F(z), where F(z) = −iz with z =
X1/X0 = Y 1/Y 0. The associated Kahler potential reads K = − ln(z + z), and z is related
to the dilaton through Re z = e−2φ. We also have
NIJ = −2
(
0 1
1 0
)
, N IJ = −12
(
0 1
1 0
)
, (3.3)
as well as
N00 = −iz , N11 = −i/z , N01 = 0 . (3.4)
The flow equations (3.2) become
(Y 0 − Y 0)′
(Y 1 − Y 1)′
−i(Y 1 + Y 1)′
−i(Y 0 + Y 0)′
= i e−ψ Im
Q1
Q0
i Q0
i Q1
− i g e−ψ+2A Re
h1
h0
i h0
i h1
. (3.5)
18

This yields
(Y 0 − Y 0)′
(Y 1 − Y 1)′
−i(Y 1 + Y 1)′
−i(Y 0 + Y 0)′
= i e−ψ Re
P 0 − g e2A h1
P 1 − g e2A h0
Q0 + g e2A h1
Q1 + g e2A h0
. (3.6)
In order to gain some intuition for finding a solution with all charges and fluxes turned
on, let us first consider a simpler example. We retain only one of the four charge/flux
combinations appearing in (3.6), namely the one with Q1 6= 0, h0 6= 0. Observe that any
of these four combinations satisfies the symplectic constraint (2.32). The associated flow
equations (3.6) are
(Y 0 − Y 0)′
(Y 1 − Y 1)′
−i(Y 1 + Y 1)′
−i(Y 0 + Y 0)′
= i e−ψ
0
0
0
Q1 + g e2A h0
, (3.7)
which yields Y 1 = constant and
(Y 0)′ = −12 e
−ψ(
Q1 + g e2A h0)
. (3.8)
The flow equations for ψ and A read,
(eψ)′ = −2g Re(
Y 1)
h0 ,(
e2A)′
= −2e−ψ Re(
Y 1) (
Q1 + g e2A h0)
. (3.9)
For the equation for A we used q0 = 0 and q1 = e−A−ψ(
Q1 + g e2A h0)
. The flow equation
for ψ can be readily integrated and yields
eψ = −2g Re(
Y 1)
h0 (r + c) , (3.10)
where c denotes an integration constant. Inserting this into the flow equation for A gives
(
e2A)′=Q1 + g e2A h0
g h0 (r + c), (3.11)
which can be integrated to
e2A =eβ(r + c)−Q1
g h0, (3.12)
where β denotes another integration constant. Plugging this into the flow equation for Y 0,
we can easily integrate the latter,
Y 0 =eβ
4gh0 (ReY 1)(r + δ) , (3.13)
where δ denotes a third integration constant. Using (2.5), we infer
δ = c− e−βQ1 . (3.14)
19

Moreover, for U we obtain
e2U = e2ψ−2A =4g3 (h0)3
(
Re Y 1)2
(r + c)2
eβ(r + c)−Q1. (3.15)
We take the horizon to be at r + c = 0, i.e. we set c = 0 in the following. Summarizing,
we thus obtain
Y 1 = constant ,
Y 0 =eβ r −Q1
4 gh0 (ReY 1),
Re z =4 g h0 (ReY 1)2
eβ r −Q1,
e2A =eβ r −Q1
g h0=
4 (ReY 1)2
Re z,
e2U =4g3 (h0)3
(
Re Y 1)2r2
eβ r −Q1,
e2ψ = 4g2(
Re Y 1)2
(h0)2 r2 . (3.16)
We require h0 > 0 and Q1 < 0 to ensure positivity of Re z, e2A and e2U . This choice is also
necessary in order to avoid a singularity of Re z and e2U at r = e−βQ1. The resulting brane
solution has non-vanishing entropy density, i.e. e2A(r=0) 6= 0. The imaginary part of z is
left unspecified by the flow equations. However, demanding the constraint (2.41) imposes
Y 1 to be real, so that Im z = 0. Note that Re Y 1 corresponds to a flat direction. The
above describes the extremal limit of the solution discussed in sec. 7 of [35] in the context of
AdS/CMT (see also [44, 45, 46]).7
We now want to solve the equations (3.6) when all charges and fluxes are non-zero. Since
the equations are quite difficult to solve directly, we will make an ansatz for eψ and e2A and
then solve for the Y I . In the example above we saw that eψ and e2A were linear functions of
r, so we choose the following ansatz for these functions,
eψ(r) = a r ,
e2A(r) = b r + c . (3.17)
When plugging this ansatz into the flow equations (3.6) we get
(Y 0(r))′ = − 1
2ar
(
¯Q1 + igc
¯h1
)
− gb
2ai¯h1 ,
(Y 1(r))′ = − 1
2ar
(
¯Q0 + igc
¯h0
)
− gb
2ai¯h0 . (3.18)
These equations can easily be integrated to give
Y 0(r) = − 1
2a
(
¯Q1 + igc
¯h1
)
ln r − gb
2ai¯h1r + C0 ,
Y 1(r) = − 1
2a
(
¯Q0 + igc
¯h0
)
ln r − gb
2ai¯h0r + C1 . (3.19)
7In order to compare the solutions, one would have to set γ = δ = 1 in (7.1) of [35], take their solution to
the extremal limit m2 = q2
8and relate the radial coordinates according to r(us) = 1
2l(r(them))2 − 1
2q√8.
20

In order for (3.17) and (3.19) to constitute a solution, several conditions on the parameters
a, b, c, the charges and the fluxes have to be fulfilled. On the one hand, one has to impose
the constraints
Im(
QIYI)
= 0 , Re(
hIYI)
= 0 , (3.20)
following from (2.34) and (2.39) for γ = 0. On the other hand, further constraints on the
parameters arise from (2.5), (2.33) and the equation for ψ in (3.1). Note that the equation
for U does not give additional information, as U is determined, once the Y I and ψ are given.
First, the constraints (3.20) imply
Re(
QINIJ ¯hJ
)
= 0 ,
Im(
QICI)
= 0 ,
Re(
hICI)
= 0 . (3.21)
Next, let us have a look at the equation for ψ. Using our ansatz for eψ, it reads
a = −2 g Im(
Y I hI
)
. (3.22)
With the form of the Y I given in (3.19) and demanding that the right hand side of (3.22) is
a constant, we obtain the constraint
Re(
¯h1h0
)
= 0 . (3.23)
This directly leads to a vanishing of the term linear in r. Together with the symplectic
constraint (2.33) it also implies that the logarithmic term vanishes. Moreover, we read off
a = −2g Im(
CI hI
)
. (3.24)
Next, we analyze the constraints coming from e2A = −NIJYI Y J . With our ansatz (3.17)
and the form of NIJ given in (3.3), one obtains
b r + c = 4Re(
Y 0Y 1)
. (3.25)
This fixes the constant c to be
c = 4Re(C0C1) . (3.26)
Using (3.24) the term linear in r on the right hand side of (3.25) is just identically b r,
i.e. there is no constraint on b (except that it has to be positive in order to guarantee the
positivity of e2A for all r). All other terms on the right hand side vanish if one demands
QINIJ ¯QJ = 0 , (3.27)
Re[(
QI − igchI
)
CI]
= 0 , (3.28)
in addition to (3.23) and the symplectic constraint (2.33).
We now show that (3.28) is fulfilled because the even stronger constraint
QI − igchI = 0 (3.29)
21

holds. To do so, we note that (3.28) together with (3.21) and (3.24) imply
Q0C0 + Q1C
1 = −ac2,
h0C0 + h1C
1 = −i a2g. (3.30)
To get a solution for C0 and C1 one of the two following conditions has to be valid:
i) If and only if Q0h1 − h0Q1 = ρ 6= 0 there is a unique solution for C0 and C1.
ii) If the two lines in (3.30) are multiples of each other then there exists a whole family of
solutions.
We will now show that case i) can be ruled out. To do so we combine the determinant
condition of case i) with the first constraint in (3.21), i.e. we look at the system of linear
equations for Q0 and Q1
Q0h1 − Q1h0 = ρ ,
Q0¯h1 + Q1
¯h0 = 0 . (3.31)
Obviously, the two lines cannot be multiples of each other for ρ 6= 0. Thus, in order to find
a solution at all, the determinant h1¯h0 +
¯h1h0 has to be non-vanishing. This is, however, in
conflict with (3.23). Thus, the two lines in (3.30) have to be multiples of each other, implying
(3.29). Note that this implies the absence of the logarithmic terms in the solutions for Y I .
To summarize we have found the following solution:
Y 0(r) = − gb2ai¯h1r + C0 ,
Y 1(r) = − gb2ai¯h0r + C1 ,
eψ(r) = ar ,
e2A(r) = br + c . (3.32)
In addition, the parameters have to fulfill the conditions
Re(h0¯h1) = 0 , QI = igchI , hIC
I = −i a2g, Re(C0C1) =
c
4, (3.33)
while the parameter b can be any non-negative number. For b = 0 this solution falls into the
class discussed in section 2.3.
Let us finally also mention that one can show that the F (X) = −iX0X1 model does
not allow for Nernst brane solutions (i.e. solutions with vanishing entropy) of the first-order
equations. Making an ansatz eU ∼ rα, eψ ∼ rβ and eA ∼ rβ−α for the near-horizon geometry,
one can show that the only solutions with both non-vanishing charges and fluxes have α =
β = 1 and are captured by the solution discussed in this section after setting b = 0.
22

3.1.2 The F = − (X1)3/X0 model: Interpolating solution between AdS4 and
AdS2 × R2
Next, we would like to construct a (supersymmetric) solution that interpolates between an
AdS4 vacuum at spatial infinity, and an AdS2 × R2 background with constant Y I at r = 0.
Thus, asymptotically, we require the solution to be of the domain wall type (see (2.52)) with
γ = π/2. Hence the Y I satisfy (2.53) with αI = βI = 0, so that we may write Y I = yI∞ r with
yI∞ = g N IJ ¯hJ = constant. The latter can be established as follows. Using (Y − Y )I = ig hI r
and FI − FI = ig hI r, we obtain
iNIJ YJ = FI − FIJ Y
J = ig¯hI r , (3.34)
so that12(Y + Y )I = g
(
N IJ ¯hJ − 12 i h
I)
r . (3.35)
It follows that asymptotically,
Y I = g N IJ ¯hJ r , (3.36)
and hence, in an AdS4 background,
e2A = e2U = −g2 hI N IJ ¯hJ r2 . (3.37)
Since this expression only depends on the Y I through the combinations NIJ and FIJ , which
are homogeneous of degree zero, the r-dependence scales out of these quantities, and thus
hI NIJ ¯hJ is a constant. For e2A to be positive, we need to require a2 ≡ −hI N IJ ¯hJ > 0.
At r = 0, on the other hand, we demand γ = γ0 as well as YI = constant, with A given by
(2.73). Thus, we want to construct a solution with a varying γ(r) that interpolates between
the values π/2 and γ0. From (2.77) we know that hI NIJ ¯hJ = 0 at the horizon. The Y I
appearing in this expression are evaluated at the horizon. In general, their values will differ
from the asymptotic values, so that the flow will interpolate between an asymptotic AdS4
background satisfying hI NIJ ¯hJ < 0 and an AdS2×R
2 background satisfying hI NIJ ¯hJ = 0.
This, however, will not be possible whenever FIJ is independent of the Y I , such as in the
F = −iX0X1 model, as already observed in [32]. Thus, in the example below, we will
consider the F = − (X1)3/X0 model instead.
The interpolating solution has to have the following properties. At spatial infinity, where
ImW (Y ) = 0, γ is driven away from its value π/2 by the term ReZ(Y ) in the flow equation
of γ,
γ′ =[
e2U−3ψ ReZ(Y )]
∞=[
e−4U ReZ(Y )]
∞=
ReZ(y∞)
a4 r3, (3.38)
and hence
γ(r) ≈ π
2− ReZ(y∞)
2a4 r2. (3.39)
Our example below has ReZ(y∞) = 0 though and, thus, the phase γ will turn out to be
constant. Near r = 0, on the other hand, the deviation from the horizon values can be
determined as follows. Denoting the deviation by δY I = βI rp, we obtain δ(e2A) = c rp with
c = −NIJ(βI Y J + Y I βJ) , (3.40)
23

where in this expression the Y I and NIJ are calculated at the horizon. Using this, we compute
the deviation of qI from its horizon value qI = 0,
δqI = e−A−ψ−iγ0(
−FI JL(pJ + ighJ )βL + ig¯hI c
)
rp , (3.41)
where all the quantities that do not involve βI are evaluated on the horizon. The flow
equations for the Y I then yield
pNIK βK =
e−iγ0
∆
(
−FI J L(pJ + ighJ )βL + ig¯hI c
)
, (3.42)
where
∆ = −2g Im(
eiγ0 hI YI)
. (3.43)
Contracting (3.42) with Y I yields p = 1. Inserting this value into (3.42) yields a set of
equations that determines the values of the βI .
Next, using the flow equation for γ, we compute the deviation from the horizon value γ0,
which we denote by δγ = Σ r. We obtain
Σ = − g
∆Re(
eiγ0 βI hI
)
. (3.44)
The example below will have a vanishing Σ, consistent with a constant γ. Finally, using the
flow equation for ψ we compute the change of ψ,
δψ = − g
∆Im(
eiγ0 βI hI
)
r . (3.45)
We now turn to a concrete example of an interpolating solution. As already mentioned,
this will be done in the context of the F (X) = − (X1)3
X0 model. To obtain an interpolating
solution we first need to specify the form of the solution at both ends.
Let us first have a look at the near horizon AdS2×R2 region. According to our discussion
in sec. 2.3, we have to solve (2.77) and QI = ige2AhI under the assumption that the Y I
are constant. It turns out that these constraints can be solved, for instance, by choosing
Q0, P1, h1, h
0 6= 0 and all other parameters vanishing. Of course, due to the symplectic
constraint (2.32), the four non-vanishing parameters are not all independent, but have to
fulfill
P 1 =Q0h
0
h1. (3.46)
For F (Y ) = − (Y 1)3
Y 0 , and introducing z = z1 + iz2 = Y 1
Y 0 , we have
NIJ =
(
−4 Im(
z3)
6 Im(
z2)
6 Im(
z2)
−12 Im (z)
)
. (3.47)
Using
e2A = 8|Y 0|2z32 , (3.48)
24
which follows from (2.5), shows that one can fulfill QI = ige2AhI and (2.77) by fixing
z1 = 0 ,
z2 =
√
(3 + 2√3)h1
3h0,
|Y 0| =3
14√Q0
2√2z22
√h1. (3.49)
Interestingly we find that the axion has to vanish and all parameters Q0, P1, h1, h
0 have to
have the same sign.
In order to describe the asymptotic AdS4 region, we note that asymptotically the charges
Q0 and P 1 can be neglected and we can read off the asymptotic form of the solution from
(2.53) with vanishing integration constants αI and βI . More precisely, we have to allow that
the asymptotic form of the interpolating solution differs from (2.53) by an overall factor. This
is because, apriori, we only know that asymptotically (ψ − 2U)′ = 0, cf. (2.34) for vanishing
charges. Without the need to match the asymptotic region to a near horizon AdS2 × R2
region, we could just absorb the constant ψ − 2U in a rescaling of the coordinates x and y.
However, when we start from the hear horizon solution and integrate out to infinity, we can
not expect to end up with this choice of convention. Allowing for a non-vanishing constant
ψ − 2U = C 6= 0, the flow equations (2.52) for Y I and, thus, also the solutions (2.53), would
obtain an overall factor eC . Concretely, we obtain
Y 0AdS4
(r) = ieCg
2h0r ,
Y 1AdS4
(r) = −eCg√h0h1
2√3
r , (3.50)
with a constant eC to be determined by numerics below. Note, however, that the dilaton
e−2φ = z2 =√
h13h0
is independent of this factor and it comes out to be real if h1 and h0 have
the same sign, consistently with what we found from the near horizon region.
We would now like to discuss the interpolating solution, which we obtain by specifying
boundary conditions at the horizon and then integrating numerically from the horizon to
infinity using Mathematica’s NDSolve. Given that in the AdS4 region Y0 is purely imaginary
and Y 1 is purely real, we choose the same reality properties at the horizon, i.e. we fulfill
(3.49) by
Y 0h = i
354h0
√Q0
2√2(3 + 2
√3)h
321
,
Y 1h = iY 0
h z2 = − 334
√
h0Q0
2√
2(3 + 2√3)h1
. (3.51)
The subscript h means that these values pertain to the horizon. Now we can determine the
phase γ0 at the horizon using (2.42). We get e−2iγ0 = −1 independently of h1, h0, Q0 and
25
P 1. We choose γ0 = π/2 as in the asymptotic AdS4 region and we will see that this leads to
a constant value for γ throughout.
Next we have to determine how the solution deviates near the horizon from AdS2 × R2.
We do this following our discussion at the beginning of this section, cf. (3.40) - (3.45). Given
the reality properties of Y I in both limiting regions, we choose β0 purely imaginary and β1
purely real. Solving (3.42) for the β’s results in
Imβ0 = Re β1h0(
(√3− 2)
√
3 + 2√3h1
√
h1h0
+ (5√3− 9)Q0)
)
h21. (3.52)
Given this, the deviation of all the fields close to the horizon can be determined (resulting
in initial conditions at, say ri = 10−6) and a numerical solution for the flow equations (2.34)
can be found, integrating from the horizon outwards. To do the numerics we chose
g = 1 , Re β1 = 0.01 , Q0 = 1 , h1 = 1 , h0 = 10 . (3.53)
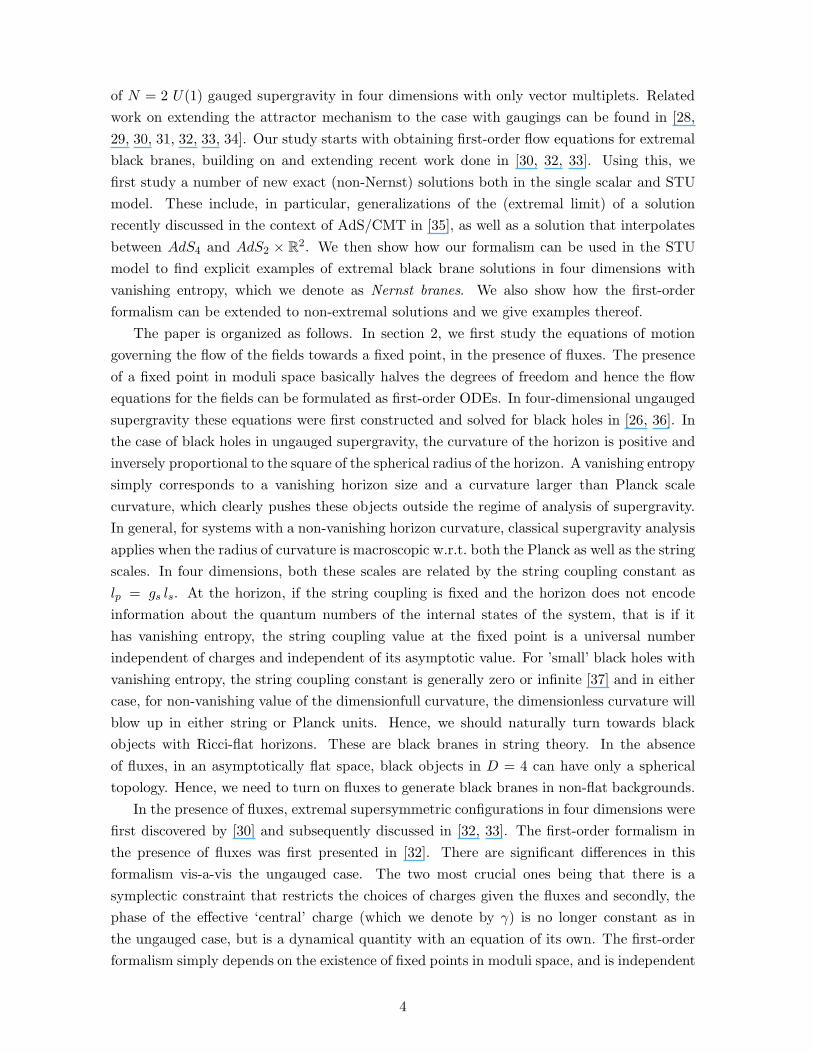
One can see that asymptotically ImY 0 and ReY 1 are linear functions of r (cf. fig. 1), whereas
the real part of Y 0 and imaginary part of Y 1 are zero within the numerical tolerances. The
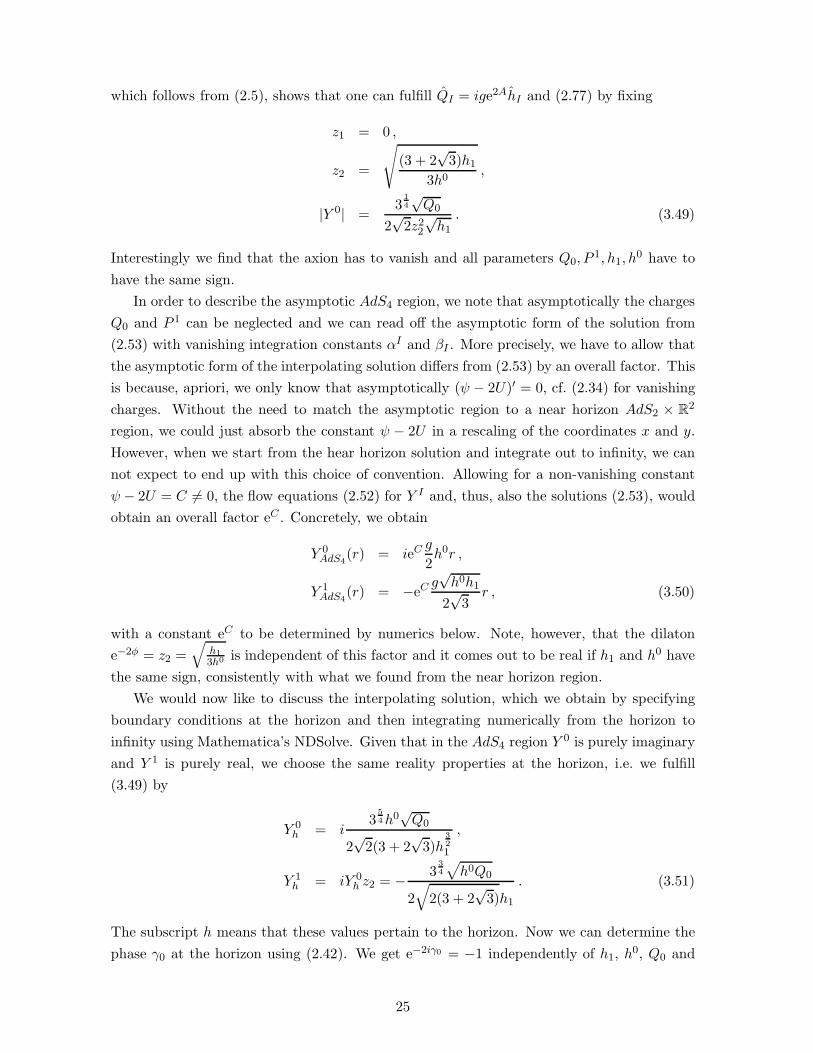
constant eC in (3.50) can be determined to be roughly eC ≈ 422. Futhermore, for r → ∞,
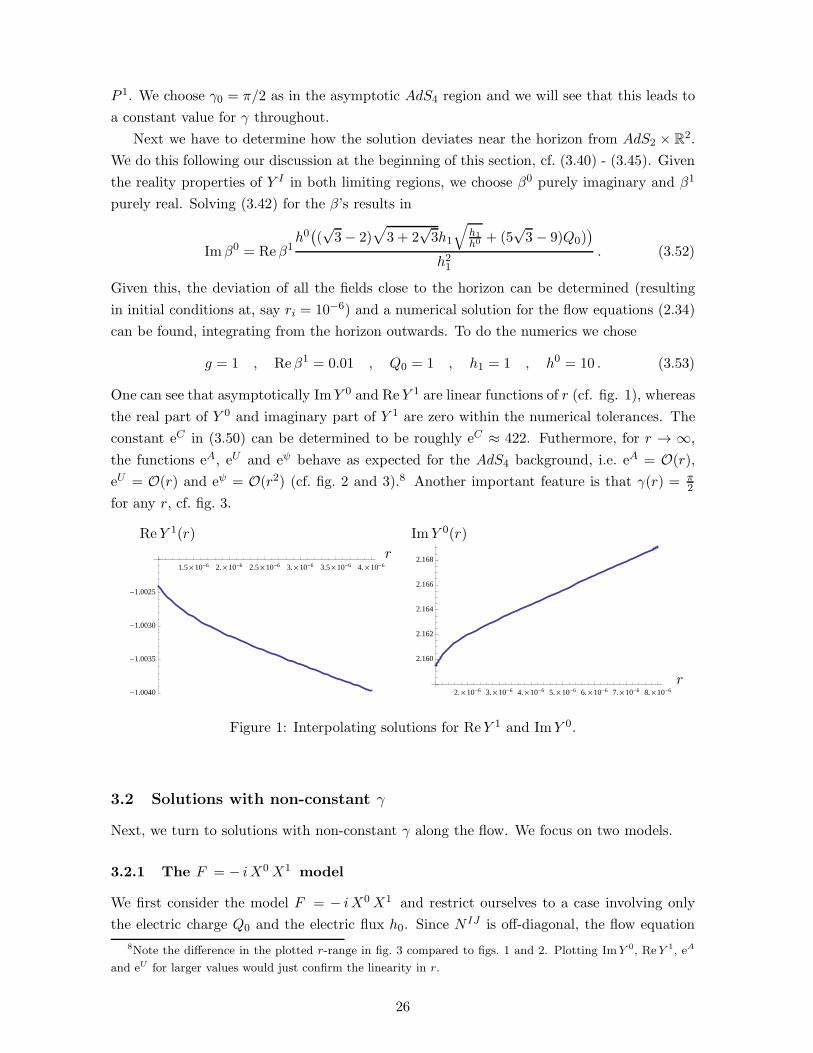
the functions eA, eU and eψ behave as expected for the AdS4 background, i.e. eA = O(r),
eU = O(r) and eψ = O(r2) (cf. fig. 2 and 3).8 Another important feature is that γ(r) = π2
for any r, cf. fig. 3.
1.5´10-6 2.´10-6 2.5´10-6 3.´10-6 3.5´10-6 4.´10-6
-1.0040
-1.0035
-1.0030
-1.0025
2.´10-6 3.´10-6 4.´10-6 5.´10-6 6.´10-6 7.´10-6 8.´10-6
2.160
2.162
2.164
2.166
2.168
ReY 1(r)
r
ImY 0(r)
r
Figure 1: Interpolating solutions for ReY 1 and ImY 0.
3.2 Solutions with non-constant γ
Next, we turn to solutions with non-constant γ along the flow. We focus on two models.
3.2.1 The F = − iX0X1 model
We first consider the model F = − iX0X1 and restrict ourselves to a case involving only
the electric charge Q0 and the electric flux h0. Since N IJ is off-diagonal, the flow equation
8Note the difference in the plotted r-range in fig. 3 compared to figs. 1 and 2. Plotting ImY 0, ReY 1, eA
and eU for larger values would just confirm the linearity in r.
26
2.´10-6 4.´10-6 6.´10-6 8.´10-6 0.00001
1.932
1.934
1.936
1.05´10-6 1.1´10-6 1.15´10-6 1.2´10-6
3.3´10-6
3.4´10-6
3.5´10-6
3.6´10-6
3.7´10-6
3.8´10-6
3.9´10-6
eA(r)
r
eU(r)
r
Figure 2: Interpolating solutions for eA and eU .
200 000 400 000 600 000 800 000 1´106
1´1014
2´1014
3´1014
4´1014
5´1014
200 000 400 000 600 000 800 000 1´106
0.5
1.0
1.5
2.0
2.5
3.0
eψ(r)
r
γ(r)
r
Figure 3: Interpolating solutions for eψ and γ.
for Y 0 reads Y ′0 = 0. This gives Y 0 = C0, with C0 a non-vanishing c-number, which we
take to be real, since the phase of C0 can be absorbed into γ. Then, the relation (2.5) yields
exp(2A) = 4C0 Re(
Y 1)
, from which we infer that Re Y 1 = exp(2A)/(4C0). In the following
we take Q0, h0 > 0 and C0 < 0, for concreteness.
The constraint equation (2.39) yields the following relation between γ and A,
tan [ γ ] =g h0Q0
e2A . (3.54)
Using the τ -variable introduced in (2.47), the flow equation for A can be written as
A = − Re[
(Q0 e− 2A − i g h0 )C
0 eiγ]
= −C0(
Q0 e−2A cos [ γ ] + g h0 sin [ γ ]
)
, (3.55)
where A = ∂A/∂τ . Using (3.54) and (assuming γ ∈ [−π/2, π/2])
sin [ γ ] =tan [ γ ]
√
1 + tan2[ γ ](3.56)
in (3.55) gives∂
∂τe2A = −2C0
√
Q20 + g2 h20 e
4A . (3.57)
This is solved by
e2A = α
(
eδ τ − Q20
4α2 g2 h20e−δ τ
)
, (3.58)
27

where δ = −2 g h0 C0 > 0 and α denotes an integration constant. Setting α = Q0/(2gh0) this
becomes
e2A =Q0
gh0sinh( δ τ ) , (3.59)
and demanding exp(2A) to be positive restricts the range of τ to lie between 0 and ∞.
The flow equation for ψ is given by
ψ = δ sin [ γ ] = δ tanh( δ τ ) , (3.60)
where we used (3.56), (3.54) and (3.59). This can easily be solved by
eψ−ψ0 = cosh( δ τ ) , (3.61)
where ψ0 denotes an integration constant which we set to zero. Using dr = exp(ψ) dτ , we
establish
r − r0 =sinh( δ τ )
δ> 0 . (3.62)
As τ → 0 we have exp(2A) → 0 and r − r0 → 0.
The dilaton is given by
Re z = Re
(
Y 1
Y 0
)
=e2A
4 (C0)2. (3.63)
We notice here that the dilaton eφ = (√Re z)−1 blows up at r → r0. The same happens
with the curvature invariants like the Ricci scalar. As the curvature invariants vanish asymp-
totically for large r (we checked this up to second order in the Riemann tensor), one could
still hope that our solution describes the asymptotic region of a global solution, once higher
curvature corrections are taken into account.
3.2.2 The STU model
Now we consider the STU-model, which is based on F (Y ) = −Y 1Y 2Y 3/Y 0. We denote the
zi = Y i/Y 0 (with i = 1, 2, 3) by z1 = S , z2 = T , z3 = U . For concreteness, we will only
consider solutions that are supported by an electric charge Q0 and an electric flux h0. In
addition, we will restrict ourselves to axion-free solutions, that is solutions with vanishing
ReS , ReT , ReU . The solutions will thus be supported by S2 = ImS , T2 = ImT , U2 =
ImU , so that
NIJ =
4S2T2U2 0 0 0
0 0 −2U2 −2T2
0 −2U2 0 −2S2
0 −2T2 −2S2 0
,
N IJ =1
4S2T2U2
1 0 0 0
0 S22 −S2T2 −S2U2
0 −S2T2 T 22 −T2U2
0 −S2U2 −T2U2 U22
. (3.64)
28

The flow equations for the Y i imply that they are constant. To ensure that S, T and U
are axion-free, we take the constant Y i to be purely imaginary, i.e. Y i = i Ci, where the Ci
denote real constants. Using (2.5) in the form
e2A = 8 |Y 0|2 S2 T2 U2 , (3.65)
the flow equation (2.47) for Y 0 gives
Y 0 = 2 |Y 0|2 (Q0 e− 2A + i g h0 ) e
− i γ . (3.66)
Using the constraint equation (2.39) in the form
Im[
(Q0 e− 2A + i g h0 ) e
− iγ Y 0]
= 0 (3.67)
as well as the flow equation for A,
A = − Re[
(
Q0 e− 2A + i g h0
)
e− iγ Y 0]
, (3.68)
we can rewrite (3.66) as
Y 0 = − 2Y 0 A . (3.69)
This immediately gives
Y 0 = C0 e− 2A , (3.70)
where C0 denotes an integration constant which we take to be real, for simplicity. Then, it
follows from (3.65) that
8C1C2C3
C0= 1 . (3.71)
For concreteness we take CI < 0 (I = 0, . . . , 3) in the following (ensuring the positivity of
S2, T2 and U2), as well as h0, Q0 > 0.
The constraint equation (3.67) yields the following relation between γ and A,
tan [ γ ] =g h0Q0
e2A . (3.72)
The flow equation (3.68) can be written as
12
∂
∂τe2A = −C0
(
Q0 e−2A cos [ γ ] + g h0 sin [ γ ]
)
(3.73)
which, using (3.72), leads to
14
∂
∂τe4A = −C0
√
Q20 + g2 h20 e
4A . (3.74)
This can be solved to give
e4A =4 g4 h40
(
C0)2
(τ + c )2 − Q20
g2 h20, (3.75)
29

where c denotes a further integration constant. Hence, the prefactor of the planar part of the
metric is
e2A =
√
4 g4 h40 (C0)2 (τ + c )2 − Q20
g h0. (3.76)
This is well behaved provided that (τ + c)2 ≥ Q20/(4g
4 h40 (C0)2).
The flow equation for ψ,
ψ = −2 g h0 C0 e− 2A sin [ γ ] (3.77)
is solved by (using (3.56), (3.72) and (3.75))
eψ =1
τ + c. (3.78)
The radial coordinate is then related to the τ variable by
r [ τ ] = log [ τ + c ] , (3.79)
where we set an additional integration constant to zero.
The physical scalars are given by
S2 =C1
C0e2A , T2 =
C2
C0e2A , U2 =
C3
C0e2A . (3.80)
They are positive as long as e2A is. However, as in the previous example, they vanish at
the lower end of the radial coordinate (indicating that string loop and α′ corrections should
become important). Again also the curvature blows up there and one can at best consider this
solution as an asymptotic approximation to a full solution which might exist after including
higher derivative terms. As we said in the introduction, it would be worthwhile to further
pursue the search for everywhere well behaved solutions with non-constant γ as they might
be radically different from the ungauged case.
4 Nernst brane solutions in the STU model
In the following we construct Nernst brane solutions (i.e. solutions with vanishing entropy
density) in a particular model, namely the STU-model already discussed in sec. 3.2.2. As
there, we denote the zi = Y i/Y 0 (with i = 1, 2, 3) by z1 = S , z2 = T , z3 = U . For
concreteness, we will only consider solutions that are supported by the electric charge Q0 and
the electric fluxes h1, h2, h3. In addition, we will restrict ourselves to axion-free solutions,
that is solutions with vanishing ReS , ReT , ReU . The solutions will thus be supported by
S2 = ImS , T2 = ImT , U2 = ImU , and the corresponding matrices NIJ and N IJ are given
in eq. (3.64). We thus have that e2A is determined by (3.65). In the following, we take Y 0 to
be real, so that the Y i will be purely imaginary.
Let us consider the flow equation (2.47) for the Y I . We set γ = 0. Instead of working
with a τ coordinate defined by dτ = e−ψ dr, we find it convenient to work with dτ = −e−ψ dr.
30

We obtain
Y 0 = − Q0
4S2T2U2,
Y i = 2 i g Y i[
2Y i hi − Y j hj
]
, (4.1)
where i, j = 1, 2, 3 and Y I = ∂Y I/∂τ . Here, i is not being summed over, while j is. The flow
equations for Y i are solved by
Y i = − i
2 g hi τ. (4.2)
Next, using that for an axion-free solution S2 = − i Y 1/Y 0, T2 = − i Y 2/Y 0 and U2 =
− i Y 3/Y 0, and inserting (4.2) into the flow equation for Y 0, we obtain
Y 0 = 2g3Q0 h1h2h3(
Y 0)3τ3 . (4.3)
This equation can be easily solved to give
Y 0 = − 1√
−g3Q0 h1 h2 h3 ( τ4 + C0 ), (4.4)
where C0 denotes an integration constant. We also take Q0 < 0 and h1, h2, h3 > 0. This
ensures that the physical scalars
S2 =1
2 g h1 τ
√
−g3 Q0 h1 h2 h3 ( τ4 + C0) ,
T2 =1
2 g h2 τ
√
−g3Q0 h1 h2 h3 ( τ4 + C0) ,
U2 =1
2 g h3 τ
√
−g3Q0 h1 h2 h3 ( τ4 + C0) (4.5)
take positive values.
Next, we consider the flow equation for ψ following from (2.34). Using (4.2), we obtain
ψ = 2 g Im[
Y i hi
]
= −3
τ, (4.6)
which upon integration yields
eψ−ψ0 =1
τ3, (4.7)
where ψ0 denotes an integration constant, which we set to ψ0 = 0. We can thus take τ to
range between 0 and ∞. The relation dτ = −e−ψ dr then results in
r [ τ ] =1
2 τ2+ Cr , (4.8)
where Cr denotes a real constant, which we take to be zero in the following. This sets the
range of r to vary from ∞ to 0 as τ varies from 0 to ∞.
Using (3.65), we obtain
e2A =
√−Q0√
g3 h1 h2 h3
√τ4 + C0
τ3, (4.9)
31

and hence
e−2U =
√−Q0√
g3 h1 h2 h3
√
τ4 + C0 τ3 . (4.10)
We take C0 to be non-vanishing and positive to ensure that the curvature scalar remains
finite througout and that the above describes a smooth solution of Einstein’s equations.
Asymptotically (τ → 0) we obtain
e2Ar→∞−→ α
(
1 +1
8C0 r2
)
(2 r)3/2 ,
e−2U r→∞−→ α
(
1 +1
8C0 r2
)(
1
2 r
)3/2
,
e2Ur→∞−→ α−1
(
1− 1
8C0 r2
)
(2 r)3/2 , (4.11)
where α =√
−Q0C0/(g3 h1 h2 h3). Observe that both exp(2A) and exp(2U) have an asymp-
totic r3/2 fall-off, which is rather unusual. Finally, observe that the scalar fields S2, T2 and
U2 grow as(
C0 r)1/2
asymptotically.
The near-horizon solution (which corresponds to τ → ∞) can be obtained by setting
C0 = 0 in the above. This yields
e2Ar→0−→
√−Q0√
g3 h1 h2 h3(2 r)1/2 ,
e−2U r→0−→√−Q0
√
g3 h1 h2 h3
1
(2 r)5/2, (4.12)
while S2, T2 and U2 approach the horizon as r−1/2. The near-horizon geometry has an in-
finitely long radial throat as well as a vanishing area density, which indicates that the solution
describes an extremal black brane with vanishing entropy density. It describes a supersym-
metric Nernst brane solution that is valid in supergravity, and hence in the supergravity
approximation to string theory when switching off string theoretic α′-corrections. When em-
bedding this solution into type IIA string theory, where S, T and U correspond to Kahler
moduli, the fact that asymptotically and at the horizon S2 , T2 and U2 blow up indicates that
this solution should be viewed as a good solution only in ten dimensions. In the heterotic de-
scription, where S2 is related to the inverse of the heterotic string coupling gs, the behaviour
S2 = ∞ (which holds asymptotically and at the horizon) is consistent with working in the
classical limit gs → 0.
We observe that the Nernst brane solution constructed above differs substantially from
the one constructed in [29]. This is related to the fact that here we deal with a flux potential
in gauged supergravity, and not with a cosmological constant as in [29].
The solution given above is supported by electric charges and fluxes, only. Additional
supersymmetric Nernst solutions can be generated through the technique of symplectic trans-
formations. On the other hand, a non-supersymmetric Nernst solution can be obtained from
the above one by replacing the charge vector Q by S Q in the flow equations, as described in
section 2.2.
32

5 Non-extremal deformation
In this section we construct a class of non-extremal black brane solutions that are based on
first-order flow equations. We do this by turning on a deformation parameter in the line
element describing extremal black branes. In the context of N = 2 U(1) gauged supergravity
in five dimensions, it was shown in [47] that there exists a class of non-extremal charged
black hole solutions that are based on first-order flow equations, even though their extremal
limit is singular. There, the non-extremal parameter is not only encoded in the line element,
but also in the definition of the physical charges. Here, we will only study the case where
the deformation parameter enters in the line element. A different procedure for constructing
non-extremal black hole solutions has recently been given in [48] in the context of ungauged
supergravity in four dimensions.
We begin by deforming the line element (2.1) into
ds2 = −(e2U − µ e2R)dt2 + (e2U − µ e2R)−1dr2 + e2(ψ−U)(
dx2 + dy2)
, (5.1)
where R = R(r) and µ is the non-extremal deformation parameter. Using
− 1
2
√−gR = e2ψ[
(
U ′ − ψ′)2
+ 2ψ′2 + 2ψ′′ − U ′′]
+µ e2(ψ−U+R)[
6U ′ ψ′ − 3U ′2 − 3ψ′2 + 2U ′′ − 2ψ′′
−2R′2 − 4R′ (ψ′ − U ′)−R′′]
, (5.2)
the one-dimensional action (2.30) gets deformed into
− S1d = −S1d(µ = 0) + µ
∫
dr e2(ψ−U+R)[
(ψ′ − U ′)2 + 2R′ (ψ′ − U ′)]
−µ∫
dr e2(R+ψ−U−A) NIJ
(
Y ′I −A′ Y I) (
Y ′J −A′ Y J)
+µ
∫
drd
dr
[
e2(ψ−U+R)(
2U ′ − 2ψ′ −R′)
]
, (5.3)
where S1d(µ = 0) denotes the action given in (2.30). Using (2.5) and (2.6), the second line
of this action can be written as
−µ∫
dr e2(R+ψ−U−A)[
NIJ Y′I Y ′J + (A′)2 e2A
]
= −µ∫
dr e2(R+ψ−U−A)[
NIJ
(
Y ′I − eAN IK qK) (
Y ′J − eANJL qL)
(5.4)
+eA[
qI(
Y ′I − 12eAN IK qK
)
+ qI(
Y ′I − 12eAN IL qL
)]
+ (A′)2 e2A]
.
33

Using this, we rewrite the action (up to a total derivative) as
− S1d = −S1d(µ = 0)
+µ
∫
dr e2R
(
[
(
eψ−U)′
−(
eA)′]2
+ 2(
eA)′[
(
eψ−U)′
−(
eA)′]
)
+µ
∫
dr 12
(
e2R)′(
e2(ψ−U))′
−µ∫
dr e2(R+ψ−U−A)[
NIJ
(
Y ′I − eAN IK qK) (
Y ′J − eANJL qL)
+eA[
qI(
Y ′I − 12eAN IK qK
)
+ qI(
Y ′I − 12eAN IL qL
)]
]
+µ
∫
dr e2R[
(
eA)′]2 (
1− e2(ψ−U−A))
. (5.5)
Now consider varying the action (5.5) and imposing the first-order flow equations (2.34) on
the fields. We begin by considering the variation
δ[
qI(
Y ′I − 12eAN IK qK
)]
+ δ[
qI(
Y ′I − 12eAN IL qL
)]
, (5.6)
which on a solution to the first-order flow equations equals
qI δ(Y′I) + qI δ(Y
′I)− qI NIJ qJ δ
(
eA)
− qI δ(N IJ) qJ eA , (5.7)
showing that there is no need to explicitly compute the variation of qI . Note, in particular,
that the variation of γ drops out of the problem. The independent variations are
δψ[
qI(
Y ′I − 12eAN IK qK
)]
+ δψ[
qI(
Y ′I − 12eAN IL qL
)]
= 0 ,
δU[
qI(
Y ′I − 12eAN IK qK
)]
+ δU[
qI(
Y ′I − 12eAN IL qL
)]
= 0 ,
δY[
qI(
Y ′I − 12eAN IK qK
)]
+ δY[
qI(
Y ′I − 12eAN IL qL
)]
= qI δ(Y′I)
−qI N IJ qJ δY(
eA)
− i qI N IP FPQLNQJ qJ e
A δY L . (5.8)
Then, varying the action (5.5) with respect to ψ gives
(
e2R)′′
e2A +(
e2R)′ (
e2A)′+(
e2R) (
e2A)′′
+ 2e2R+2A qI NIJ qJ = 0 . (5.9)
Now we use that on a solution to the first-order flow equations,
(
e2A)′′
= −2 e2A qI NIJ qJ . (5.10)
This relation will be established below. Then, using (5.10) in (5.9) gives
(
e2R)′′
e2A +(
e2R)′ (
e2A)′
=[
(
e2R)′e2A]′
= 0 , (5.11)
which implies(
e2R)′
= C e−2A , (5.12)
where C denotes an integration constant.
34

The variation of the action (5.5) with respect to U also gives the equation (5.11), while
varying the action with respect to R yields (5.10), which is satisfied on a solution to the
first-order flow equations.
Finally, varying the action (5.5) with respect to Y I and using its flow equation in the
form
NIJ Y′′J =
(
eA qI)′+ i e2A qLN
LP FPJI NJK qK , (5.13)
yields (upon integration by parts)
(
e2R)′ (
Y ′J −A′ Y J)
+ e2R Y ′′J = 0 (5.14)
which, using (5.12), can also be written as
(
e2R)′′Y J + 2
(
e2R)′Y ′J + 2e2R Y ′′J = 0 . (5.15)
Now, let us demonstrate the validity of (5.10). This relation can be established by noticing
that it equals(
e2A)′′
+ 2NIJ Y′I Y ′J = 0 (5.16)
on a solution to the first-order flow equations. Using (2.6), this in turn becomes
NIJ
(
Y ′′I Y J + Y I Y ′′J)
= i(
FIJK Y′I Y ′J Y K − FI JK Y
′I Y ′J Y K)
= 0 . (5.17)
The second equality in (5.17) follows from
FIJK Y′I Y ′J = (FIJK Y
I Y ′J)′ − FIJK YI Y ′′J = 0 , (5.18)
where (A.1) was used in the last step. We now proceed to show the vanishing of the left hand
side of (5.17), which will then imply (5.16).
Using (5.18) and the first-order flow equation for Y I , we compute
Y ′′I = N IK(
eA qK)′ − iN IK FKP Q Y
′P Y ′Q . (5.19)
Inserting this into (5.17) gives
(
eA qI)′Y I +
(
eA qI)′Y I = 0 . (5.20)
Next, using (2.29) we obtain
(
eA qI)′Y I = (i γ − ψ)′ eA qI Y
I − 2i g A′ e2A−ψ+i γ hI YI . (5.21)
Using
A′ = −e−AqI YI , (5.22)
which holds due to (2.41), (5.21) becomes
(
eA qI)′Y I =
[
(i γ − ψ)′ − 2i g e−ψ+i γW (Y )]
eA qI YI . (5.23)
35
Inserting the flow equations for γ′ and ψ′ into this, and using the constraint (2.39) yields
(
eA qI)′Y I = 0 . (5.24)
Thus we conclude that (5.20) vanishes on a solution to the first-order flow equations, and
hence also the left hand side of (5.17).
This concludes the discussion of equations resulting from the variation of the one-dimensional
action (5.5). Next, we have to impose the Hamilton constraint (2.48). Inserting the deformed
line element (5.1), we find that the changes induced in (2.51) are proportional to derivatives of
R. Thus, demanding R = constant, we obtain that both the Hamilton constraint and (5.12)
are satisfied, provided we set C = 0 in the latter equation. Finally, inserting R = constant in
(5.15) yields Y ′′J = 0. Thus, we conclude that the class of non-extremal black brane solutions
described by the deformed line element (5.1) with constant R has a description in terms of
the first-order flow equations (2.34) provided that the Y I are either constant or exhibit a
growth that is linear in r.
Examples of non-extremal black brane solutions that fall into this class are 1) the non-
extremal version of the solution presented in (3.32), which includes the solution discussed in
[35], 2) the non-extremal deformation of the extremal domain wall solution (2.53) and 3) the
non-extremal version of the interpolating solution near AdS4 and near AdS2 × R2 discussed
in section 3.1.2.
Acknowledgments
We would like to thank Gianguido Dall’Agata, Stefanos Katmadas and Stefan Vandoren
for valuable discussions. SB, MH, SN and NO thank CAMGSD for hospitality. GLC thanks
the Niels Bohr Institute and ASC-LMU for hospitality. This work is supported in part by
the Excellence Cluster “The Origin and the Structure of the Universe” in Munich. The work
of GLC is supported by the Fundacao para a Ciencia e a Tecnologia (FCT/Portugal). The
work of MH and SN is supported by the German Research Foundation (DFG) within the
Emmy-Noether-Program (grant number: HA 3448/3-1). The work of NO is supported in part
by the Danish National Research Foundation project “Black holes and their role in quantum
gravity”. The work of SB, GLC, MH and SN is supported in part by the transnational
cooperation FCT/DAAD grant “Black Holes, duality and string theory”.
36

A Special geometry
As is well known, the Lagrangian describing the couplings of N = 2 vector multiplets to
N = 2 supergravity is encoded in a holomorphic function F (X), called the prepotential, that
depends on n + 1 complex scalar fields XI (I = 0, . . . , n). Here, n counts the number of
physical scalar fields. The coupling to supergravity requires F (X) to be homogeneous of
degree two, i.e. F (λX) = λ2F (X), from which one derives the homogeneity properties
FI = FIJ XJ ,
FIJK XK = 0 , (A.1)
where FI = ∂F (X)/∂XI , FIJ = ∂2F/∂XI∂XJ , etc. The XI are coordinates on the big
moduli space, while the physical scalar fields zi = Xi/X0 (i = 1, . . . , n) parametrize an
n-dimensional complex hypersurface, which is defined by the condition that the symplectic
vector (XI , FI(X)) satisfies the constraint
i(
XI FI − FI XI)
= 1 . (A.2)
This can be written as
−NIJ XI XJ = 1 , (A.3)
where
NIJ = −i(
FIJ − FIJ)
. (A.4)
The constraint (A.3) is solved by setting
XI = eK(z,z)/2XI(z) , (A.5)
where K(z, z) is the Kahler potential,
e−K(z,z) = |X0(z)|2 [−NIJ ZI ZJ ] (A.6)
with ZI(z) = (Z0, Zi) = (1, zi). Writing
F (X) =(
X0)2 F(z) , (A.7)
which is possible in view of the homogeneity of F (X), we obtain
F0 = X0(
2F(z) − zi Fi)
, (A.8)
where Fi = ∂F/∂zi. In addition, we compute
F00 = 2F − 2zi Fi + zi zj Fij ,F0j = Fj − ziFij ,Fij = Fij , (A.9)
to obtain
−NIJ ZI ZJ = i
[
2(
F − F)
−(
zi − zi) (
Fi + Fi)]
, (A.10)
37

and hence
e−K(z,z) = i |X0(z)|2[
2(
F − F)
−(
zi − zi) (
Fi + Fi)]
. (A.11)
The XI(z) are defined projectively, i.e. modulo multiplication by an arbitrary holomorphic
function,
XI(z) → e−f(z)XI(z) . (A.12)
This transformation induces the Kahler transformation
K → K + f + f (A.13)
on the Kahler potential, while on the symplectic vector (XI , FI(X)) it acts as a phase trans-
formation, i.e.
(XI , FI(X)) → e−12 (f−f) (XI , FI(X)) . (A.14)
The resulting geometry for the space of physical scalar fields zi is a special Kahler geometry,
with Kahler metric
gi =∂2K(z, z)
∂zi ∂zj(A.15)
based on a Kahler potential of the special form (A.11).
Let us relate the Kahler metric (A.15) to the metric (A.4) on the big moduli space.
Differentiating e−K yields
∂ke−K = −∂kK e−K = i |X0(z)|2
[
Fk − Fk − (zi − zi)Fik]
+ ∂k lnX0(z) e−K ,
∂k∂le−K = [−∂k∂lK + ∂kK ∂lK] e−K = [−gkl + ∂kK ∂lK] e−K
= i |X0(z)|2(
Fkl − Fkl)
−[
∂k lnX0(z) ∂l ln X
0(z)
−∂k lnX0(z) ∂lK − ∂kK ∂l ln X0(z)
]
e−K . (A.16)
Using (A.9) we have
Nij = −i(
Fij − Fij)
, (A.17)
and hence we infer from (A.16) that
gi = Nij |X0|2 + 1
|X0(z)|2DiX0(z)D X
0(z) , (A.18)
where
DiX0(z) = ∂iX
0(z) + ∂iKX0(z) (A.19)
denotes the covariant derivative ofX0(z) under the transformation (A.12), i.e. Di
(
e−fX0(z))
=
e−f DiX0(z).
Next, let us consider the combination NIJ DµXI DµXJ , where the space-time covariant
derivative Dµ reads
DµXI = ∂µX
I + iAµXI = ∂µX
I +1
2
(
∂iK ∂µzi − ∂ıK∂µz
i)
XI , (A.20)
38
which is a covariant derivative for U(1) transformations (A.14). The combination NIJ DµXI DµXJ
is thus invariant under U(1)-transformations. Observe that
DµX0 = eK/2DiX
(0)(z) ∂µzi . (A.21)
Using (A.3) we obtain
NIJ DµXI DµXJ = |X0|2Nij ∂µz
i ∂µzj − 1
|X0|2 DµX0 DµX0
+X0
X0NiJX
J ∂µziDµX0 +
X0
X0NIjX
I ∂µzj DµX0 . (A.22)
Next, using
X0 XJ NkJ =1
X0(z)DkX
0(z) , (A.23)
as well as (A.18) and (A.21) we establish
NIJ DµXI DµXJ = gi ∂µz
i ∂µzj , (A.24)
which relates the kinetic term for the physical fields zi to the kinetic term for the fields
XI on the big moduli space. Observe that both sides of (A.24) are invariant under Kahler
transformations (A.13).
Using the relation (A.24), we express the bosonic Lagrangian (describing the coupling
of n vector multiplets to N = 2 U(1) gauged supergravity) in terms of the fields XI of big
moduli space,
L = 12R−NIJ DµX
I DµXJ + 14ImNIJ F
Iµν F
µνJ − 14ReNIJ F
Iµν F
µνJ − g2V (X, X) , (A.25)
where
NIJ = FIJ + iNIK X
K NJLXL
XM NMN XN, (A.26)
which satisfies the relation
NIJ XJ = FI . (A.27)
The flux potential reads
V = giDiW DW − 3|W |2 , W = hI FI − hI XI , (A.28)
where DiXI = ∂iX
I + 12∂iKXI . Here, (hI , hI) denote the magnetic/electric fluxes. AdS4
with cosmological constant Λ = −3g2 corresponds to a constant W with |W | = 1. Switching
off the flux potential corresponds to setting g = 0.
Using the identity (see (23) of [40])
N IJ = giDiXI DX
J −XI XJ , (A.29)
the flux potential can be expressed as
V (X, X) =[
giDiXI DX
J − 3XIXJ] (
hK FKI − hI) (
hK FKJ − hJ)
=[
N IJ − 2XIXJ] (
hK FKI − hI) (
hK FKJ − hJ)
= N IJ ∂IW∂J¯W − 2 |W |2 , (A.30)
39

where in the last line W is expressed in terms of U(1)-invariant fields XI ,
W = hI FI(X)− hI XI =
(
hI FIJ − hJ)
XJ . (A.31)
B First-order rewriting in minimal gauged supergravity
The N = 2 Lagrangian in minimal gauged supergravity is given in terms of the prepotential
F = − i (X0)2. Only a single scalar field, X0 is turned on, whose absolute value is set to
a constant, |X0|2 = 14 by the constraint (A.3), and the consequent bulk 1-D Lagrangian
density for the metric ansatz (2.1) is given by
− L1D = e2A+2U [−A′2 − 2A′ U ′ +1
4e−2U − 4A ( |Q0|2 − 3 g2 |h0|2e4A ) ] . (B.1)
Here A = ψ − U . We now perform a first-order rewriting for this Lagrangian inspired by
the corresponding rewriting for black holes in minimal gauged supergravity, as done in [49].
Denoting φ1 = A , φ2 = U , W = eU√
( |Q0|2 + g2 |h0|2 e4A + γ eA ) ,9 and the matrix,
m =
(
1 1
1 0
)
, we can write the above Lagrangian density as
L1D = e2A+2U [φa′mab φb′ +
1
4e−4U − 4AmabWaWb ] . (B.2)
Here, W1 = WA is the derivative of W w.r.t A and W2 = WU is the derivative of W w.r.t
U , given explicitly as
WA =e2U
2W( 4 g2 |h0|2 e4A + γ eA ) ,
WU = W . (B.3)
The first-order rewriting is then simply,
L1D = e2A+2U [mab (φa′ − 1
2e− 2U − 2AmacWc ) (φ
b ′ − 1
2e− 2U − 2AmbdWd ) ] + φa′Wa .
(B.4)
Using the chain-rule of derivatives on W = W (φa ) , the last term in the above equation
becomes φa′Wa = W ′ . Hence the first-order rewritten Lagrangian can finally be written as
L1D = e2A+2U [mab (φa′ − 1
2e− 2U − 2AmacWc ) (φ
b ′ − 1
2e− 2U − 2AmbdWd ) ] + W ′ .
(B.5)
The first-order equations for the metric functions can be written as
A′ =1
2e−2U − 2AWU , (B.6)
U ′ =1
2e−2U − 2A (WA − WU ) . (B.7)
9Here γ is an arbitrary real number.
40
The Hamiltonian density can be written as H = L1D − [ e2 (A+U ) ( 2A′ ) ]′ . On-shell, using
the first-order equations, this can be written as H = L1D − [(W ′ ) ] . Substituting for L1D
from (B.6), we see that the on-shell Hamiltonian density becomes
H = e2A+2U [mab (φa′ − 1
2e− 2U − 2AmacWc ) (φ
b′ − 1
2e− 2U − 2AmbdWd ) ] . (B.8)
This is trivially zero on-shell as the perfect squares vanish due to the first order equations.
Hence the Hamiltonian constraint from General Relativity is satisfied for field configura-
tions obeying these first-order equations. This completes the first-order rewriting for the
Lagrangian in minimal gauged supergravity. All smooth black brane solutions to these first-
order first order equations are necessarily non-supersymmetric. Smooth non-supersymmetric
black brane solutions in minimal gauged supergravity which solve the above first-order equa-
tions have been written down in [50] where it was also shown that the supersymmetric
solutions are singular.
For the metric ansatz,
ds2 = (−r2
vdt2 + v
dr2
r2) + e2A ( dx2 + dy2 ) , (B.9)
there is a different rewriting of this Lagrangian given by,
L1D = − [ ( ( eA )′)2 e2U + 2eA+U ( ( eA )
′) ( ( eU )
′ − 1√v)
+ 2 ( ( eA )′) eA+U 1√
v− 1
4e− 2A ( |Q0|2 − 3 g2 |h0|2e4A ) ] . (B.10)
The first-order equations following from the rewriting above are
( eA )′
= 0 , (B.11)
( eU )′
=1√v, (B.12)
with v = 2 e4A
|Q0|2. The Hamiltonian density vanishes on-shell provided e4A = |Q0|2
3 g2 |h0|2. The
AdS2 × R2 background with AdS2 radius,
√v , which is a near-horizon black brane geometry
in the presence of fluxes, is a solution to these first order equations.
References
[1] M. Planck, The Theory of Heat Radiation (1915), Springer (reprint).
[2] A. Strominger and C. Vafa, Microscopic origin of the Bekenstein-Hawking entropy,
Phys. Lett. B379 (1996) 99–104 [arXiv:hep-th/9601029].
[3] J. M. Maldacena, A. Strominger, and E. Witten, Black hole entropy in M-theory,
JHEP 12 (1997) 002 [arXiv:hep-th/9711053].
[4] R. Dijkgraaf, E. P. Verlinde, and H. L. Verlinde, Counting dyons in N = 4 string
theory, Nucl. Phys. B484 (1997) 543–561 [arXiv:hep-th/9607026].
41
[5] R. Dijkgraaf, G. W. Moore, E. P. Verlinde and H. L. Verlinde, Elliptic genera of
symmetric products and second quantized strings, Commun. Math. Phys. 185 (1997)
197-209 [arXiv:hep-th/9608096].
[6] D. Shih, A. Strominger, and X. Yin, Recounting dyons in N = 4 string theory, JHEP
10 (2006) 087 [arXiv:hep-th/0505094].
[7] D. P. Jatkar and A. Sen, Dyon spectrum in CHL models, JHEP 04 (2006) 018
[arXiv:hep-th/0510147].
[8] A. Dabholkar, J. Gomes and S. Murthy, Counting all dyons in N =4 string theory,
JHEP 1105 (2011) 059 [arXiv:0803.2692 [hep-th]].
[9] A. Sen, N=8 Dyon Partition Function and Walls of Marginal Stability, JHEP 0807
(2008) 118 [arXiv:0803.1014 [hep-th]].
[10] A. Strominger, Black hole entropy from near horizon microstates, JHEP 9802 (1998)
009 [arXiv:hep-th/9712251].
[11] V. Balasubramanian and F. Larsen, Near horizon geometry and black holes in
four-dimensions, Nucl. Phys. B 528 (1998) 229 [arXiv:hep-th/9802198].
[12] A. Dabholkar, A. Sen, and S. P. Trivedi, Black hole microstates and attractor without
supersymmetry, JHEP 01 (2007) 096 [arXiv:hep-th/0611143].
[13] S. A. Hartnoll, Lectures on holographic methods for condensed matter physics, Class.
Quant. Grav. 26 (2009) 224002 [arXiv:0903.3246 [hep-th]].
[14] C. P. Herzog, Lectures on Holographic Superfluidity and Superconductivity, J. Phys. A
42, 343001 (2009) [arXiv:0904.1975 [hep-th]].
[15] J. McGreevy, Holographic duality with a view toward many-body physics, Adv. High
Energy Phys. 2010 (2010) 723105 [arXiv:0909.0518 [hep-th]].
[16] S. A. Hartnoll, Quantum Critical Dynamics from Black Holes, arXiv:0909.3553
[cond-mat.str-el].
[17] G. T. Horowitz, Introduction to Holographic Superconductors, arXiv:1002.1722 [hep-th].
[18] S. Sachdev, Condensed matter and AdS/CFT, arXiv:1002.2947 [hep-th].
[19] J. P. Gauntlett, J. Sonner and T. Wiseman, Holographic superconductivity in
M-Theory, Phys. Rev. Lett. 103 (2009) 151601 [arXiv:0907.3796 [hep-th]].
[20] G. T. Horowitz and M. M. Roberts, Zero Temperature Limit of Holographic
Superconductors, JHEP 0911 (2009) 015 [arXiv:0908.3677 [hep-th]].
[21] E. D’Hoker and P. Kraus, Charged Magnetic Brane Solutions in AdS (5) and the fate
of the third law of thermodynamics, JHEP 1003, 095 (2010) [arXiv:0911.4518 [hep-th]].
42

[22] S. Ferrara, R. Kallosh, and A. Strominger, N=2 extremal black holes, Phys. Rev. D52
(1995) 5412–5416 [arXiv:hep-th/9508072].
[23] A. Strominger, Macroscopic entropy of N = 2 extremal black holes, Phys. Lett. B383
(1996) 39–43 [arXiv:hep-th/9602111].
[24] S. Ferrara and R. Kallosh, Supersymmetry and attractors, Phys. Rev. D54 (1996)
1514–1524 [arXiv:hep-th/9602136].
[25] S. Ferrara and R. Kallosh, Universality of supersymmetric attractors, Phys. Rev. D54
(1996) 1525–1534 [arXiv:hep-th/9603090].
[26] S. Ferrara, G. W. Gibbons and R. Kallosh, Black holes and critical points in moduli
space, Nucl. Phys. B 500 (1997) 75 [arXiv:hep-th/9702103].
[27] K. Goldstein, N. Iizuka, R. P. Jena, and S. P. Trivedi, Non-supersymmetric attractors,
Phys. Rev. D72 (2005) 124021 [arXiv:hep-th/0507096].
[28] S. Bellucci, S. Ferrara, A. Marrani and A. Yeranyan, d=4 Black Hole Attractors in
N=2 Supergravity with Fayet-Iliopoulos Terms, Phys. Rev. D 77 (2008) 085027
[arXiv:0802.0141 [hep-th]].
[29] K. Goldstein, S. Kachru, S. Prakash and S. Trivedi, Holography of Charged Dilaton
Black Holes, JHEP 08 (2010) 078 [arXiv:0911.3586 [hep-th]].
[30] S. L. Cacciatori and D. Klemm, Supersymmetric AdS4 black holes and attractors,
JHEP 1001 (2010) 085 [arXiv:0911.4926 [hep-th]].
[31] K. Goldstein, N. Iizuka, S. Kachru, S. Prakash, S. Trivedi and A. Westphal, Holography
of Dyonic Dilaton Black Branes, JHEP 10 (2010) 027 [arXiv:1007.2490 [hep-th]].
[32] G. Dall’Agata and A. Gnecchi, Flow equations and attractors for black holes in
N = 2 U(1) gauged supergravity, JHEP 1103 (2011) 037 [arXiv:1012.3756 [hep-th]].
[33] K. Hristov and S. Vandoren, Static supersymmetric black holes in AdS4 with spherical
symmetry, JHEP 1104 (2011) 047 [arXiv:1012.4314 [hep-th]].
[34] S. Kachru, R. Kallosh and M. Shmakova, Generalized Attractor Points in Gauged
Supergravity, arXiv:1104.2884 [hep-th].
[35] C. Charmousis, B. Gouteraux, B. S. Kim, E. Kiritsis and R. Meyer, Effective
Holographic Theories for low-temperature condensed matter systems, JHEP 1011
(2011) 151 [arXiv:1005.4690 [hep-th]].
[36] F. Denef, Supergravity flows and D-brane stability, JHEP 0008 (2000) 050
[arXiv:hep-th/0005049].
43
[37] A. Sen, Extremal black holes and elementary string states, Mod. Phys. Lett. A 10
(1995) 2081 [arXiv:hep-th/9504147].
[38] B. de Wit, N = 2 electric-magnetic duality in a chiral background, Nucl. Phys. Proc.
Suppl. 49 (1996) 191 [arXiv:hep-th/9602060].
[39] K. Behrndt, G. L. Cardoso and D. Lust, Curved BPS domain wall solutions in
four-dimensional N = 2 supergravity, Nucl. Phys. B607 (2001) 391
[arXiv:hep-th/0102128].
[40] B. de Wit, N=2 symplectic reparametrizations in a chiral background, Fortsch. Phys.
44 (1996) 529 [arXiv:hep-th/9603191].
[41] A. Ceresole and G. Dall’Agata, Flow Equations for Non-BPS Extremal Black Holes,
JHEP 0703 (2007) 110 [arXiv:hep-th/0702088].
[42] G. L. Cardoso, A. Ceresole, G. Dall’Agata, J. M. Oberreuter and J. Perz, First-order
flow equations for extremal black holes in very special geometry, JHEP 0710 (2007)
063 [arXiv:0706.3373 [hep-th]].
[43] P. Galli, K. Goldstein, S. Katmadas and J. Perz, First-order flows and stabilisation
equations for non-BPS extremal black holes, JHEP 06 (2011) 070 [arXiv:1012.4020
[hep-th]].
[44] M. Taylor, Non-relativistic holography, arXiv:0812.0530 [hep-th].
[45] C. Charmousis, B. Gouteraux and J. Soda, Einstein-Maxwell-Dilaton theories with a
Liouville potential, Phys. Rev. D 80, 024028 (2009) [arXiv:0905.3337 [gr-qc]].
[46] B. Gouteraux and E. Kiritsis, Generalized holographic quantum criticality at finite
density, arXiv:1107.2116 [hep-th].
[47] G. L. Cardoso and V. Grass, On five-dimensional non-extremal charged black holes and
FRW cosmology, Nucl. Phys. B803 (2008) 209 [arXiv:0803.2819 [hep-th]].
[48] P. Galli, T. Ortin, J. Perz and C. S. Shahbazi, Non-extremal black holes of N=2, d=4
supergravity, JHEP 07 (2011) 041 [arXiv:1105.3311 [hep-th]].
[49] H. Lu, C. N. Pope, J. F. Vazquez-Poritz, From AdS black holes to supersymmetric flux
branes, Nucl. Phys. B709 (2005) 47-68. [hep-th/0307001].
[50] A. Chamblin, R. Emparan, C. V. Johnson and R. C. Myers, Charged AdS black holes
and catastrophic holography, Phys. Rev. D 60, 064018 (1999) [arXiv:hep-th/9902170].
44
Related Documents
![Gianguido Dall’Agata tions on N = 1 SCFT’s, Phys. Rev. D 61, 066001 (2000) [hep-th/9905226]. 2. A. Ceresole and G. Dall’Agata, General matter coupled N = 2, D = 5 gauged supergravity,](https://static.cupdf.com/doc/110x72/60410b8fe7bf6034391f7eea/gianguido-dallaagata-tions-on-n-1-scftas-phys-rev-d-61-066001-2000-hep-th9905226.jpg)

![Generalised Scherk–Schwarz reductions from gauged supergravity · arXiv:1708.02589v2 [hep-th] 22 Aug 2017 Generalised Scherk–Schwarz reductions from gauged supergravity Gianluca](https://static.cupdf.com/doc/110x72/5c0f952e09d3f23e618b8d25/generalised-scherkschwarz-reductions-from-gauged-supergravity-arxiv170802589v2.jpg)








