ORIGINAL PAPER Near-field and far-field simulation of accelerograms of Sikkim earthquake of September 18, 2011 using modified semi-empirical approach A. Joshi • Pushpa Kumari • Sandeep Singh • M. L. Sharma Received: 6 March 2012 / Accepted: 5 July 2012 / Published online: 29 August 2012 Ó Springer Science+Business Media B.V. 2012 Abstract The semi-empirical approach for modeling of strong ground motion given by Midorikawa (Tectonophysics 218:287–295, 1993) has been modified in the present paper for component wise simulation of strong ground motion. The modified approach uses seismic moment in place of attenuation relation for scaling of acceleration envelope. Various strong motion properties like directivity effect and dependence of peak ground acceleration with respect to surface projection of source model have been studied in detail in the present work. Recently, Sikkim earthquake of magnitude 6.9 (M w ) that occurred on September 18, 2011 has been recorded at various near-field and far-field strong motion stations. The modified semi-empirical technique has been used to confirm the location and parameters of rupture responsible for this earthquake. Strong motion record obtained from the iterative modeling of the rupture plane has been compared with available strong motion records from near as well as far-field stations in terms of root mean square error between observed and simulated records. Several possibilities of nucleation point, rupture velocity, and dip of rupture plane have been considered in the present work and records have been simulated at near-field stations. Final selection of model parameters is based on root mean square error of waveform comparison. Final model confirms southward propagating rup- ture. Simulations at three near-field and twelve far-field stations have been made using final model. Comparison of simulated and observed record has been made in terms of peak ground acceleration and response spectra at 5 % damping. Comparison of simulated and observed record suggests that the method is capable of simulating record which bears realistic appearance in terms of shape and strong motion parameters. Present work shows A. Joshi P. Kumari (&) S. Singh Department of Earth Sciences, Indian Institute of Technology Roorkee, Roorkee, India e-mail: [email protected] A. Joshi e-mail: [email protected] M. L. Sharma Department of Earthquake Engineering, Indian Institute of Technology Roorkee, Roorkee, India 123 Nat Hazards (2012) 64:1029–1054 DOI 10.1007/s11069-012-0281-7

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ORI GIN AL PA PER
Near-field and far-field simulation of accelerogramsof Sikkim earthquake of September 18, 2011 usingmodified semi-empirical approach
A. Joshi • Pushpa Kumari • Sandeep Singh • M. L. Sharma
Received: 6 March 2012 / Accepted: 5 July 2012 / Published online: 29 August 2012� Springer Science+Business Media B.V. 2012
Abstract The semi-empirical approach for modeling of strong ground motion given by
Midorikawa (Tectonophysics 218:287–295, 1993) has been modified in the present paper
for component wise simulation of strong ground motion. The modified approach uses
seismic moment in place of attenuation relation for scaling of acceleration envelope.
Various strong motion properties like directivity effect and dependence of peak ground
acceleration with respect to surface projection of source model have been studied in detail
in the present work. Recently, Sikkim earthquake of magnitude 6.9 (Mw) that occurred on
September 18, 2011 has been recorded at various near-field and far-field strong motion
stations. The modified semi-empirical technique has been used to confirm the location and
parameters of rupture responsible for this earthquake. Strong motion record obtained from
the iterative modeling of the rupture plane has been compared with available strong motion
records from near as well as far-field stations in terms of root mean square error between
observed and simulated records. Several possibilities of nucleation point, rupture velocity,
and dip of rupture plane have been considered in the present work and records have been
simulated at near-field stations. Final selection of model parameters is based on root mean
square error of waveform comparison. Final model confirms southward propagating rup-
ture. Simulations at three near-field and twelve far-field stations have been made using final
model. Comparison of simulated and observed record has been made in terms of peak
ground acceleration and response spectra at 5 % damping. Comparison of simulated and
observed record suggests that the method is capable of simulating record which bears
realistic appearance in terms of shape and strong motion parameters. Present work shows
A. Joshi � P. Kumari (&) � S. SinghDepartment of Earth Sciences, Indian Institute of Technology Roorkee, Roorkee, Indiae-mail: [email protected]
A. Joshie-mail: [email protected]
M. L. SharmaDepartment of Earthquake Engineering, Indian Institute of Technology Roorkee, Roorkee, India
123
Nat Hazards (2012) 64:1029–1054DOI 10.1007/s11069-012-0281-7
that this technique gives records which matches in a wide frequency range for Sikkim
earthquake and that too from simple and easily accessible parameters of the rupture plane.
Keywords Strong ground motion � Semi-empirical � Sikkim earthquake � Parameters
1 Introduction
Strong ground motion plays an important role in safe engineering design of big structures.
The site of construction seldom contains any past strong motion records that pose a major
constrain in designing earthquake-resistant design parameters. Simulated strong motion
records at such sites serve useful purpose for deciding safe design criteria. There are
number of simulation technique that can be used for simulation of strong ground motion.
Three main techniques for simulation of strong ground motion are (1) stochastic simulation
technique (Housner and Jennings 1964; Hanks and McGuire 1981; Boore 1983; McGuire
et al. 1984; Boore and Joyner 1991; Sinozuka and Sato 1967; Lai 1982), (2) empirical
Green’s function technique (Hartzell 1978, 1982; Kanamori 1979; Hadley and Helmberger
1980; Mikumo et al. 1981; Irikura and Muramatu 1982; Hadley et al. 1982; Irikura 1983;
Houston and Kanamori 1984; Imagawa et al. 1984; Munguia and Brune 1984; Hutchings
1985; Heaton and Hartzell 1989), and (3) composite source modeling technique (Zeng
et al. 1994; Yu 1994; Yu et al. 1995). Although the stochastic simulation technique gives
encouraging results for many regions, it does not include any representation of finite
earthquake source and wave propagation in the medium. Empirical Green’s function
technique is most reliable technique in terms of strong motion characterization. In this
technique, there is no need to remove propagation effects (Fukuyama and Irikura 1986).
The small earthquake record needed in this method as empirical Green’s function is
required from the site at which simulation of target earthquake is needed (Joyner and Boore
1988). This is the most difficult condition to be met in practice and hence the method is of
limited use. The method of composite source modeling takes into account the random
nature of the complex source slip function together with the use of theoretical Green’s
function (Khattri et al. 1994). One of the major disadvantages in this technique is its
requirement of several parameters for computing synthetic Green’s function which are
difficult to predict.
In the recent years, the method of modified semi-empirical simulation of strong ground
motion has been evolved as an effective tool for prediction of strong motion. This method
has advantage of both the empirical Green’s function technique and stochastic simulation
technique. The method of semi-empirical modeling has been given by Midorikawa (1993)
and later modified by Joshi and Midorikawa (2004). In this technique, synthetic records
from different sub-faults within the rupture plane are used in place of aftershock records as
Green’s function. The advantage of the proposed semi-empirical technique is that it is very
fast to calculate and is based on simple attenuation relations and modeling parameters
which are easy to predict. The semi-empirical method is used for simulation of strong
motion records by Joshi (2004), Joshi and Midorikawa (2004), and Joshi et al. (2010).
However, dependency of semi-empirical method on attenuation relation itself poses a
constraint on its applicability for its use in different seismic environment. In order to
remove dependency of this method on attenuation relation, the method was modified by
Joshi et al. (2012) to incorporate seismic moment and effect of radiation pattern in it. One
of the major limitations in the simulations using semi-empirical approach is its inability to
resolve records into horizontal component. The method has been further modified in this
1030 Nat Hazards (2012) 64:1029–1054
123
work to resolve the obtained record into horizontal components. The simulated records
obtained in the modified method have been tested with the data of the recent Sikkim
earthquake (Mw = 6.9) of September 18, 2011. The method is used to finalize various
rupture parameters of this earthquake by iterative forward modeling.
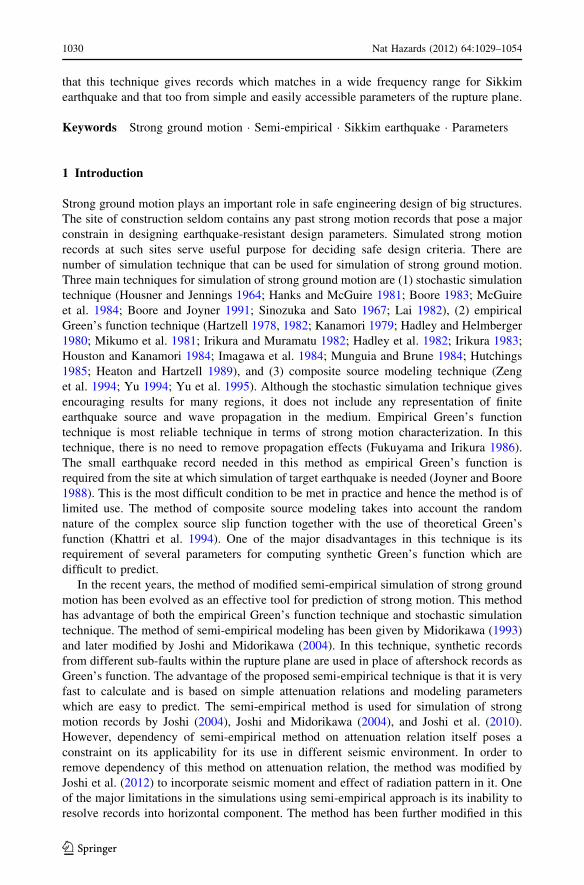
1.1 Geological framework
The Sikkim Himalaya lies in eastern region with well-mapped geological and tectonic units
(Fig. 1) having classic inverted Himalayan metamorphism. Geologically, the Sikkim
Himalaya exhibits a vast terrain of proterozoic continental crust on the Indian plate, which
is remobilized into vast slab-like Higher Himalayan crystallines (HHC) due to Himalayan
collision tectonics. This unit is bounded by the Main Central Thrust (MCT) at the base and
the South Tibetan Detachment Zone (STDZ) at the top (Fig. 1). The Lesser Himalayan
Sedimentary Zone (Buxa, Permian Ranjit Pebble Slate/Damuda Formation) occurs in the
Ranjit window and the Outer Lesser Himalayan Belt, as well. The whole sequence over-
rides the outermost Sub-Himalayan Siwalik Belt along the Main Boundary Trust (MBT).
1.2 Seismicity
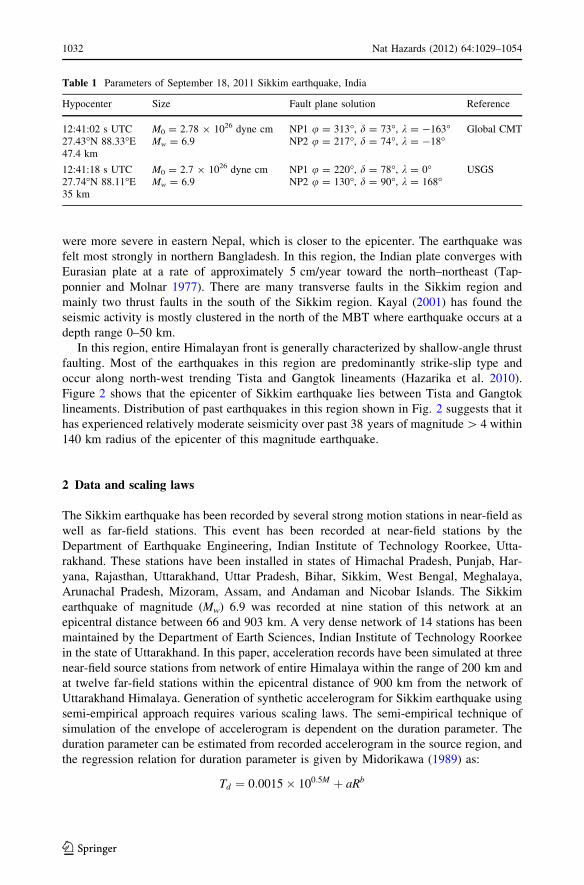
The state of Sikkim in north-eastern part of India was struck by a strong earthquake of
magnitude 6.9 (Mw) near the boundary between the Indian and Eurasian tectonic plates on
September 18, 2011. Parameters of this earthquake are given in Table 1. Sikkim Himalaya
is surrounded by three countries namely Nepal, China, and Bhutan. The shaking effects
88.00o88.25o 88.50o 88.75o 89.00o
27.00o
27.25o
27.50o
27.75o
28.00o
TISTALN
.
GA
NG
TOK
LN.
KANC
HENJU
NGA
F.LN
87.75o
STDS
STDS
LH
LH
Ductile thrust
Tethyan Sedimentary Sequence
Lesser Himalayan Rocks
Lineaments
Isograd boundary
LEGEND
MCT Zone
MCTZ
Fig. 1 Geological map of Sikkim Himalaya. MCTZ Main Central Thrust Zone, LH Lesser Himalaya, STDSSouth Tibetan Detachment System (Tectonic is taken from Nath et al. 2005 and geology is taken fromDasgupta et al. 2004)
Nat Hazards (2012) 64:1029–1054 1031
123
were more severe in eastern Nepal, which is closer to the epicenter. The earthquake was
felt most strongly in northern Bangladesh. In this region, the Indian plate converges with
Eurasian plate at a rate of approximately 5 cm/year toward the north–northeast (Tap-
ponnier and Molnar 1977). There are many transverse faults in the Sikkim region and
mainly two thrust faults in the south of the Sikkim region. Kayal (2001) has found the
seismic activity is mostly clustered in the north of the MBT where earthquake occurs at a
depth range 0–50 km.
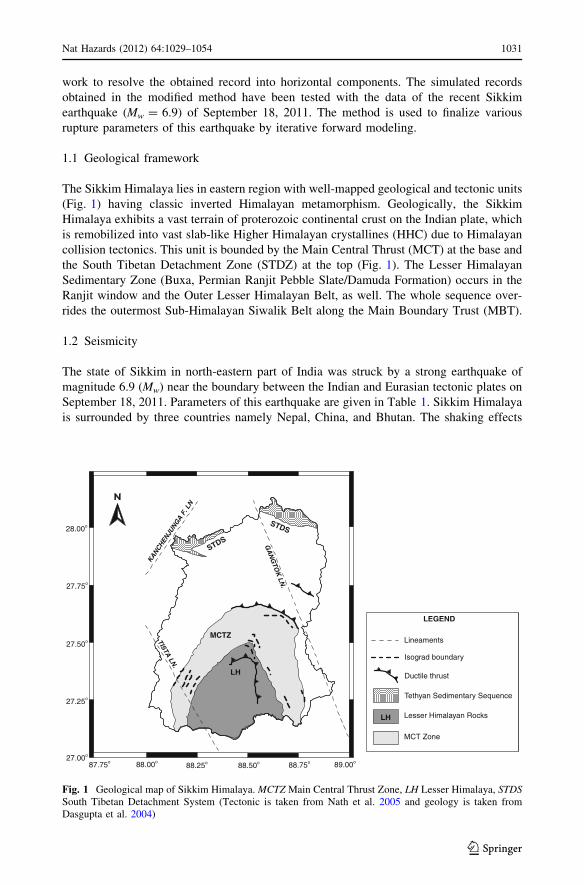
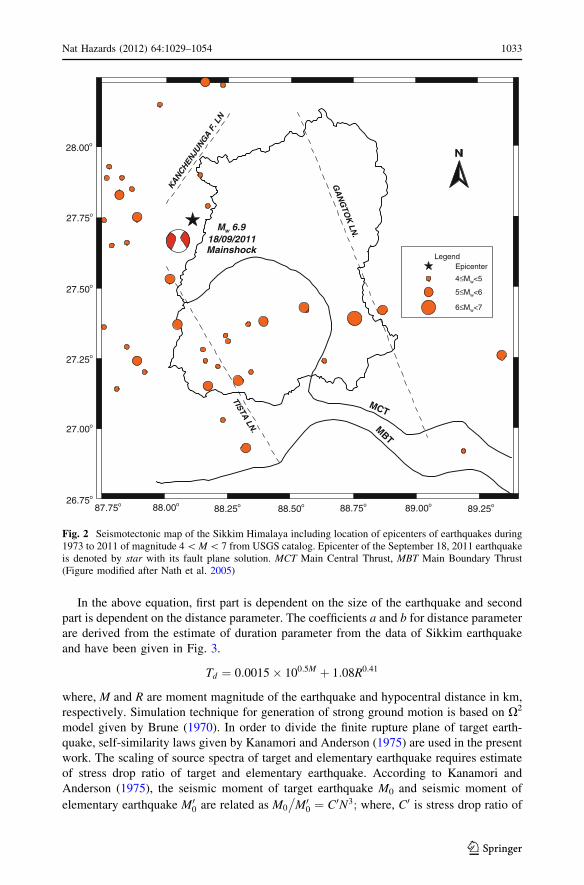
In this region, entire Himalayan front is generally characterized by shallow-angle thrust
faulting. Most of the earthquakes in this region are predominantly strike-slip type and
occur along north-west trending Tista and Gangtok lineaments (Hazarika et al. 2010).
Figure 2 shows that the epicenter of Sikkim earthquake lies between Tista and Gangtok
lineaments. Distribution of past earthquakes in this region shown in Fig. 2 suggests that it
has experienced relatively moderate seismicity over past 38 years of magnitude [ 4 within
140 km radius of the epicenter of this magnitude earthquake.
2 Data and scaling laws
The Sikkim earthquake has been recorded by several strong motion stations in near-field as
well as far-field stations. This event has been recorded at near-field stations by the
Department of Earthquake Engineering, Indian Institute of Technology Roorkee, Utta-
rakhand. These stations have been installed in states of Himachal Pradesh, Punjab, Har-
yana, Rajasthan, Uttarakhand, Uttar Pradesh, Bihar, Sikkim, West Bengal, Meghalaya,
Arunachal Pradesh, Mizoram, Assam, and Andaman and Nicobar Islands. The Sikkim
earthquake of magnitude (Mw) 6.9 was recorded at nine station of this network at an
epicentral distance between 66 and 903 km. A very dense network of 14 stations has been
maintained by the Department of Earth Sciences, Indian Institute of Technology Roorkee
in the state of Uttarakhand. In this paper, acceleration records have been simulated at three
near-field source stations from network of entire Himalaya within the range of 200 km and
at twelve far-field stations within the epicentral distance of 900 km from the network of
Uttarakhand Himalaya. Generation of synthetic accelerogram for Sikkim earthquake using
semi-empirical approach requires various scaling laws. The semi-empirical technique of
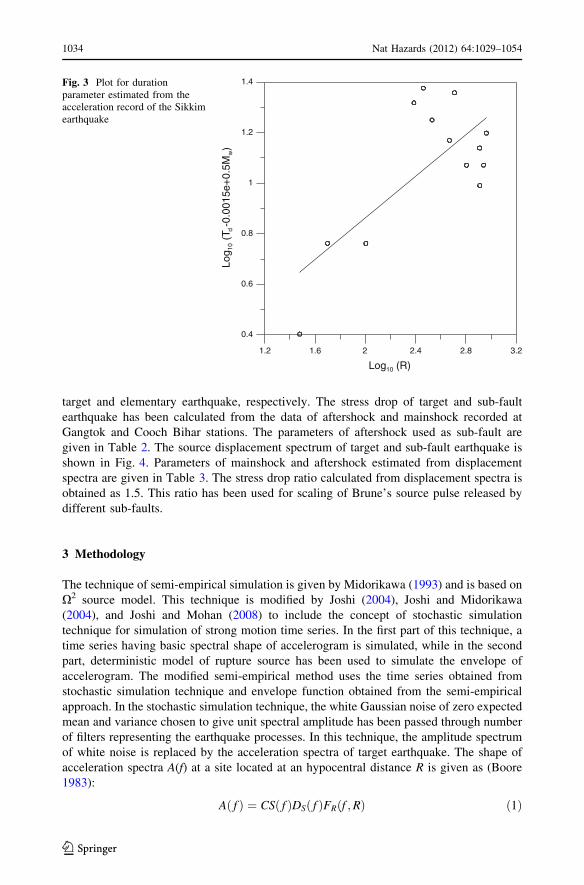
simulation of the envelope of accelerogram is dependent on the duration parameter. The
duration parameter can be estimated from recorded accelerogram in the source region, and
the regression relation for duration parameter is given by Midorikawa (1989) as:
Td ¼ 0:0015� 100:5M þ aRb
Table 1 Parameters of September 18, 2011 Sikkim earthquake, India
Hypocenter Size Fault plane solution Reference
12:41:02 s UTC27.43�N 88.33�E47.4 km
M0 = 2.78 9 1026 dyne cmMw = 6.9
NP1 u = 313�, d = 73�, k = -163�NP2 u = 217�, d = 74�, k = -18�
Global CMT
12:41:18 s UTC27.74�N 88.11�E35 km
M0 = 2.7 9 1026 dyne cmMw = 6.9
NP1 u = 220�, d = 78�, k = 0�NP2 u = 130�, d = 90�, k = 168�
USGS
1032 Nat Hazards (2012) 64:1029–1054
123
In the above equation, first part is dependent on the size of the earthquake and second
part is dependent on the distance parameter. The coefficients a and b for distance parameter
are derived from the estimate of duration parameter from the data of Sikkim earthquake
and have been given in Fig. 3.
Td ¼ 0:0015� 100:5M þ 1:08R0:41
where, M and R are moment magnitude of the earthquake and hypocentral distance in km,
respectively. Simulation technique for generation of strong ground motion is based on X2
model given by Brune (1970). In order to divide the finite rupture plane of target earth-
quake, self-similarity laws given by Kanamori and Anderson (1975) are used in the present
work. The scaling of source spectra of target and elementary earthquake requires estimate
of stress drop ratio of target and elementary earthquake. According to Kanamori and
Anderson (1975), the seismic moment of target earthquake M0 and seismic moment of
elementary earthquake M00 are related as M0
�M00 ¼ C0N3; where, C0 is stress drop ratio of
88.00o88.25o 88.50o 88.75o 89.00o 89.25o
26.75o
27.00o
27.25o
27.50o
27.75o
28.00o
MBT
MCT
TISTALN
.
GA
NG
TOK
LN.
KANC
HENJ
UNGA
F.LN
LegendEpicenter
4≤Mw<5
5≤Mw<6
6≤Mw<7
87.75o
Mw 6.918/09/2011Mainshock
Fig. 2 Seismotectonic map of the Sikkim Himalaya including location of epicenters of earthquakes during1973 to 2011 of magnitude 4 \ M \ 7 from USGS catalog. Epicenter of the September 18, 2011 earthquakeis denoted by star with its fault plane solution. MCT Main Central Thrust, MBT Main Boundary Thrust(Figure modified after Nath et al. 2005)
Nat Hazards (2012) 64:1029–1054 1033
123
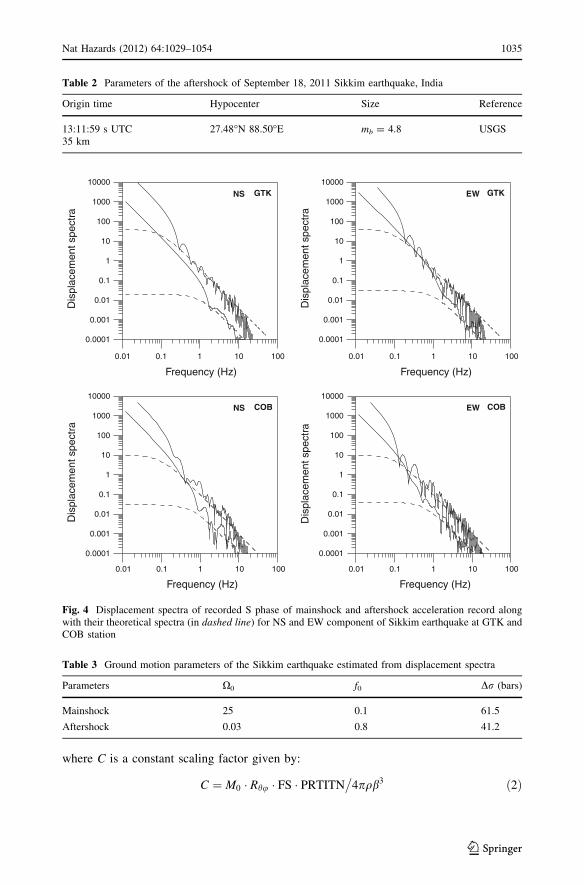
target and elementary earthquake, respectively. The stress drop of target and sub-fault
earthquake has been calculated from the data of aftershock and mainshock recorded at
Gangtok and Cooch Bihar stations. The parameters of aftershock used as sub-fault are
given in Table 2. The source displacement spectrum of target and sub-fault earthquake is
shown in Fig. 4. Parameters of mainshock and aftershock estimated from displacement
spectra are given in Table 3. The stress drop ratio calculated from displacement spectra is
obtained as 1.5. This ratio has been used for scaling of Brune’s source pulse released by
different sub-faults.
3 Methodology
The technique of semi-empirical simulation is given by Midorikawa (1993) and is based on
X2 source model. This technique is modified by Joshi (2004), Joshi and Midorikawa
(2004), and Joshi and Mohan (2008) to include the concept of stochastic simulation
technique for simulation of strong motion time series. In the first part of this technique, a
time series having basic spectral shape of accelerogram is simulated, while in the second
part, deterministic model of rupture source has been used to simulate the envelope of
accelerogram. The modified semi-empirical method uses the time series obtained from
stochastic simulation technique and envelope function obtained from the semi-empirical
approach. In the stochastic simulation technique, the white Gaussian noise of zero expected
mean and variance chosen to give unit spectral amplitude has been passed through number
of filters representing the earthquake processes. In this technique, the amplitude spectrum
of white noise is replaced by the acceleration spectra of target earthquake. The shape of
acceleration spectra A(f) at a site located at an hypocentral distance R is given as (Boore
1983):
A fð Þ ¼ CS fð ÞDS fð ÞFR f ;Rð Þ ð1Þ
1.2 1.6 2 2.4 2.8 3.2
Log10 (R)
0.4
0.6
0.8
1
1.2
1.4
Log 1
0 (T
d-0
.001
5e+
0.5M
w)
Fig. 3 Plot for durationparameter estimated from theacceleration record of the Sikkimearthquake
1034 Nat Hazards (2012) 64:1029–1054
123
where C is a constant scaling factor given by:
C ¼ M0 � Rhu � FS � PRTITN�
4pqb3 ð2Þ
Frequency (Hz)
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
Dis
plac
emen
t spe
ctra
NS GTK
Frequency (Hz)
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
Dis
plac
emen
t spe
ctra
EW GTK
Frequency (Hz)
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
Dis
plac
emen
t spe
ctra
NS COB
0.01 0.1 1 10 100
0.01 0.1 1 10 1000.01 0.1 1 10 100
0.01 0.1 1 10 100
Frequency (Hz)
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
Dis
plac
emen
t spe
ctra
EW COB
Fig. 4 Displacement spectra of recorded S phase of mainshock and aftershock acceleration record alongwith their theoretical spectra (in dashed line) for NS and EW component of Sikkim earthquake at GTK andCOB station
Table 3 Ground motion parameters of the Sikkim earthquake estimated from displacement spectra
Parameters X0 f0 Dr (bars)
Mainshock 25 0.1 61.5
Aftershock 0.03 0.8 41.2
Table 2 Parameters of the aftershock of September 18, 2011 Sikkim earthquake, India
Origin time Hypocenter Size Reference
13:11:59 s UTC35 km
27.48�N 88.50�E mb = 4.8 USGS
Nat Hazards (2012) 64:1029–1054 1035
123

In this expression, M0 is the seismic moment, Rhu is the radiation pattern, FS is the
amplification due to the free surface, PRTITN is the reduction factor that accounts for the
partitioning of total shear wave energy into two horizontal components (taken as 1/H2),
and q and b are the density and shear velocity, respectively. The radiation pattern Rhu is
dependent on the type of faulting mechanism and the geometry of earthquake source. The
filter S(f) in Eq. (1) is the source acceleration spectrum which is defined by Brune (1970) as
follows:
S fð Þ ¼ 2pfð Þ2.
1þ f=fcð Þ2h i
ð3Þ
In Eq. (1), filter DS(f) is the near-site attenuation of high frequencies and is defined as
(Boore 1983):
DS fð Þ ¼ 1.
1þ f=fmð Þ8h i1=2
ð4Þ
The parameter fm represents the high frequency cutoff range of the high-cut filter. The
filter FR(f, R) represents the effect of anelastic attenuation and is given as (Boore 1983):
FR f ;Rð Þ ¼ e�pfR=bQb fð Þ� �.
R ð5Þ
where R denotes the hypocentral distance in km and Qb(f) is the quality factor which
defines the frequency-dependent attenuation during the wave propagation. In the present
work, the frequency-dependent quality factor Qb(f) for Sikkim region is used as
Qb(f) = 167f0.47 (Nath and Thingbaijam 2009).
The spectrum of white noise after multiplication with theoretical filters given in Eq. (1)
represents basic shape of acceleration spectra. Time domain representation of this accel-
eration spectrum gives an acceleration record that has basic properties of acceleration
spectra. However, this time domain representation of acceleration record raises serious
problem, like the obtained records overestimate the high frequency strong ground motion
and underestimate low frequency in the synthetic strong ground motion. This is due to the
difference in duration of slip of the target and the small earthquake considered as sub-
faults. The difference in the duration of slip of the target and the sub-fault earthquake
following correction function F(t) given by Irikura et al. (1997) and Irikura and Kamae
(1994) is corrected by convolving with the obtained acceleration records:
F tð Þ ¼ d tð Þ þ ðN � 1Þ=TRð1� expð�1ÞÞ½ � � expð�t=TRÞ ð6Þ
where d(t) is the delta function, N is the total number of sub-faults along the length or the
width of the rupture plane, and TR is the rise time of the target earthquake. The convolution
of F(t) with obtained acceleration record aij(t) gives acceleration record Aij(t) as:
Aij tð Þ ¼ F tð Þ � aij tð Þ ð7Þ
where i and j represent the position of sub-fault along the length and the width of the
rupture plane, respectively. It is observed that stochastic simulation technique requires
proper windowing of the obtained record by a function which is based on kinematic
representation of model of rupture (Boore 1983). Such time window can be obtained by the
semi-empirical technique of Midorikawa (1993) in the form of resultant envelope of ac-
celerogram obtained from a model of finite rupture plane. The finite fault in the semi-
empirical technique proposed by Midorikawa (1993) is divided into several sub-faults is
based on self-similarity laws proposed by Kanamori and Anderson (1975). Energy is
1036 Nat Hazards (2012) 64:1029–1054
123

released in the form of acceleration envelop whenever rupture approaches center of ele-
ments. The acceleration envelope waveform eij(t) is determined from the following
functional form given by Kameda and Sugito (1978) and further modified by Joshi (2004):
eij tð Þ ¼ Tss t=Tdð Þ � exp 1� t=Tdð Þ ð8Þ
In this expression, Td represents duration parameter and Tss represents the transmission
coefficient of incident shear waves. This coefficient is given by the following formula after
Lay and Wallace (1995, p. 102) and is used by Joshi et al. (2001) for modeling the effect of
the transmission of energy in the shape of acceleration envelope as:
Tss ¼ 2l2gb2
.l1gb1
þ l2gb2
� �ð9Þ
where l1 and l2 are modulus of rigidity in the first and second layers, respectively, and b1
and b2 are shear wave velocities in the first and second layers, respectively. The trans-
mission coefficient contributes significantly to shaping the attenuation rate of the peak
ground acceleration with respect to the distance from the source. Joshi and Midorikawa
(2004) have observed that for the shallow focus earthquakes, the transmission coefficient is
&1.0; however, for the intermediate to deep focus earthquake, this coefficient is =1.0.
This means that we should take this coefficient into consideration when modeling an
intermediate to deep focus earthquake.
The parameters required to define the model of the rupture plane are its length (L), width
(W), length and width of the sub-faults (Le, We), nucleation point, strike and dip of rupture
plane (us, d), rupture velocity (Vr) and shear wave velocity in the medium. The rectangular
rupture plane of a target earthquake of seismic moment M0 is divided into N 9 N sub-
faults of seismic moment M00: Once the rupture plane of target earthquake is divided into
sub-faults, one sub-fault is fixed as nucleation point from which the rupture initiates. This
point can coincide with the focus of the earthquake. The rupture starts from the nucleation
point and propagates radially within the rupture plane. The sub-fault releases energy
whenever the rupture front touches its center. The energy is released in the form of
acceleration record acij(t), which is the product of acceleration record from stochastic
technique with envelope function from semi-empirical simulation technique as:
acij tð Þ ¼ eij tð Þ � Aij tð Þ ð10Þ
The acceleration record, acij(t), released from different sub-faults reaches the obser-
vation point at different time. The arrival time at the observation point tij depends on the
time taken by rupture from nucleation point to ijth sub-fault with rupture velocity Vr and
time taken by energy released from ijth sub-fault to reach the observation point with
velocity V of propagation. The total time taken tij is given as (Joshi and Midorikawa 2004):
tij ¼ rij
�V þ nij
�Vr ð11Þ
where rij is the distance from the observation point to the ijth sub-fault and nij is the
distance travelled by the rupture from nucleation point to particular sub-fault.
In the present work, simple vector notation has been used to resolve these resultant
components into horizontal components. The direction of resultant component from each
sub-fault is defined by a line joining center of sub-fault to the recording station. This
direction is different for different sub-faults and for obtaining horizontal component along
strike and perpendicular direction of the modeled rupture plane, records from each sub-
faults need separate treatment. Figure 5 shows the division of total acceleration record
Nat Hazards (2012) 64:1029–1054 1037
123
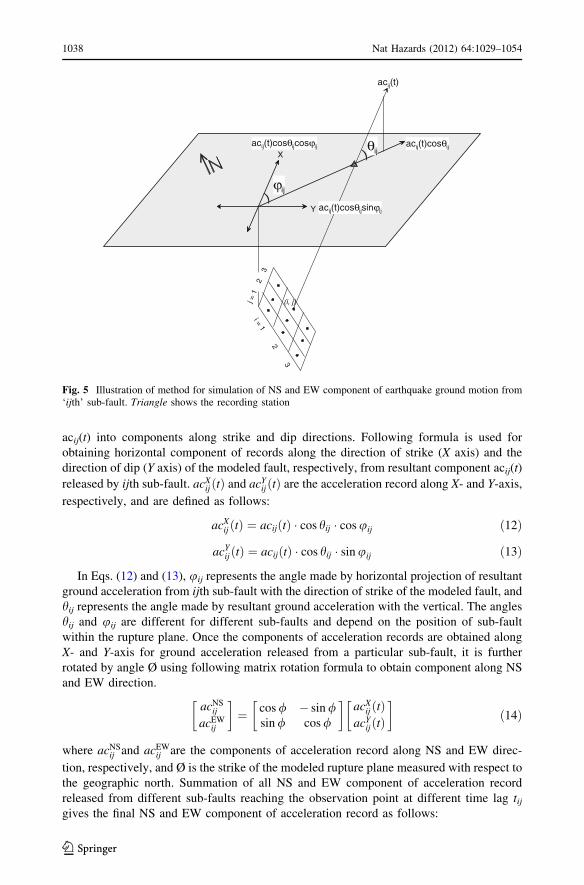
acij(t) into components along strike and dip directions. Following formula is used for
obtaining horizontal component of records along the direction of strike (X axis) and the
direction of dip (Y axis) of the modeled fault, respectively, from resultant component acij(t)
released by ijth sub-fault. acXij ðtÞ and acY
ijðtÞ are the acceleration record along X- and Y-axis,
respectively, and are defined as follows:
acXij ðtÞ ¼ acijðtÞ � cos hij � cos uij ð12Þ
acYijðtÞ ¼ acijðtÞ � cos hij � sin uij ð13Þ
In Eqs. (12) and (13), uij represents the angle made by horizontal projection of resultant
ground acceleration from ijth sub-fault with the direction of strike of the modeled fault, and
hij represents the angle made by resultant ground acceleration with the vertical. The angles
hij and uij are different for different sub-faults and depend on the position of sub-fault
within the rupture plane. Once the components of acceleration records are obtained along
X- and Y-axis for ground acceleration released from a particular sub-fault, it is further
rotated by angle Ø using following matrix rotation formula to obtain component along NS
and EW direction.
acNSij
acEWij
� �¼ cos / � sin /
sin / cos /
� �acX
ij tð ÞacY
ij tð Þ
� �ð14Þ
where acNSij and acEW
ij are the components of acceleration record along NS and EW direc-
tion, respectively, and Ø is the strike of the modeled rupture plane measured with respect to
the geographic north. Summation of all NS and EW component of acceleration record
released from different sub-faults reaching the observation point at different time lag tijgives the final NS and EW component of acceleration record as follows:
acij(t)
)
i =1
2
3(i, j)j =
12
3
X
Y
acij(t)cosθijacij(t)cosθijcosϕij
ϕij
acij(t)cosθijsinϕij
θij
)
Fig. 5 Illustration of method for simulation of NS and EW component of earthquake ground motion from‘ijth’ sub-fault. Triangle shows the recording station
1038 Nat Hazards (2012) 64:1029–1054
123
AcNS tð Þ ¼XN
i¼1
XN
j¼1
acNSij t � tij
� �ð15Þ
AcEW tð Þ ¼XN
i¼1
XN
j¼1
acEWij t � tij
� �ð16Þ
where AcNS tð Þ and AcEW tð Þ represent the north–south and east–west component of
acceleration records, respectively. A FORTRAN code, named MSETCS (Modified Semi
Empirical Technique for Component-wise Simulation) has been developed using the
proposed method for component wise simulation of strong ground motion.
4 Methodology: a discussion
Directivity effects are considered to be one of the most important properties of strong motion
records. The approach of semi-empirical modeling given by Midorikawa (1993) clearly
Distance (Km)
-400
-200
0
200
400
Dis
tanc
e (K
m)
-1000 -500 0 500 1000 1500
-1000 -500 0 500 1000 1500
Distance (Km)
-400
-200
0
200
400
Dis
tanc
e (K
m)
(a)
(b)
A B
A B
. .
. .
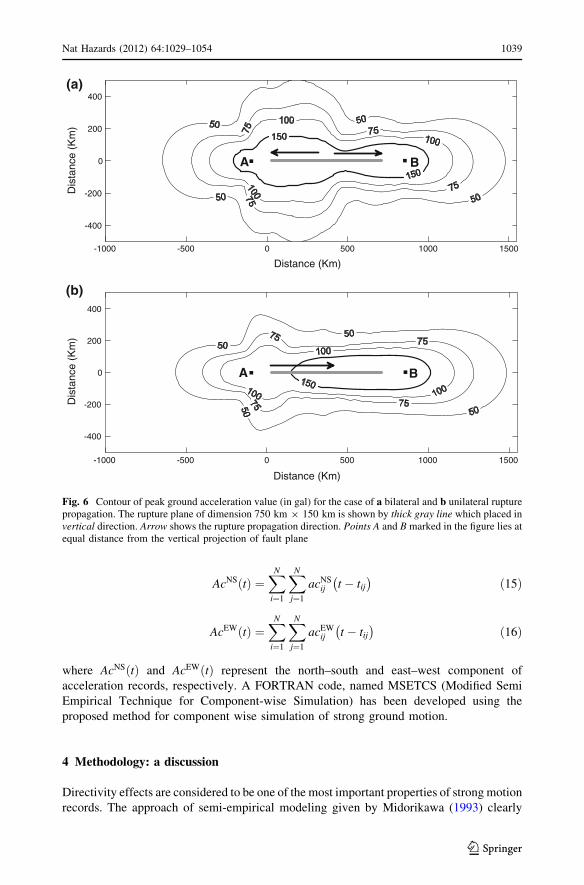
Fig. 6 Contour of peak ground acceleration value (in gal) for the case of a bilateral and b unilateral rupturepropagation. The rupture plane of dimension 750 km 9 150 km is shown by thick gray line which placed invertical direction. Arrow shows the rupture propagation direction. Points A and B marked in the figure lies atequal distance from the vertical projection of fault plane
Nat Hazards (2012) 64:1029–1054 1039
123
follows directivity effects. The modifications in the semi-empirical approach suggested by
Joshi and Midorikawa (2004) for layering and correction function also confirm the presence
of directivity effects in the simulated records. In the present work, seismic moment has been
used for scaling the amplitude of accelerogram together with the radiation pattern. These
modifications require an investigation regarding applicability of directivity effects in strong
motion records. In order to check the effect of directivity in the modified technique, strong
motion records are simulated on both sides of the rupture plane for bilateral and unilateral
rupture propagations. In this numerical experiment, a simple vertical rupture plane of length
750 km and downward extension 150 km has been assumed. The dip and rake of this rupture
is assumed to be 90� and 0� to consider pure strike-slip mechanism. This rupture plane is
divided into 81 sub-faults, each of which corresponds to 7.1 (Mw) magnitudes and placed in a
layered velocity model defined by Cotte et al. (1999). Variation of peak ground acceleration
on both sides of the rupture plane in strike direction for bilateral rupture propagation and
unilateral rupture propagation is shown in Fig. 6. It is observed that due to inclusion of
radiation pattern, transmission effect, and component wise simulation, absolute symmetry is
not obtained in case of bilateral rupture propagation. However, it is observed that two points
equidistant from the corner of rupture plane have nearly same peak ground acceleration for
bilateral propagation. In case of unilateral rupture propagation, peak ground acceleration
values are higher in the direction of rupture propagation compared to peak ground accel-
eration in the opposite direction of rupture propagation. This confirms the presence of
directivity effect in the modified technique which is used for component wise simulation of
strong ground motion in this paper.
5 Rupture model of Sikkim earthquake
Location of the causative fault of this earthquake is decided on the basis of location of
epicenter of this earthquake and seismic activity in the region. Most of the earthquakes in
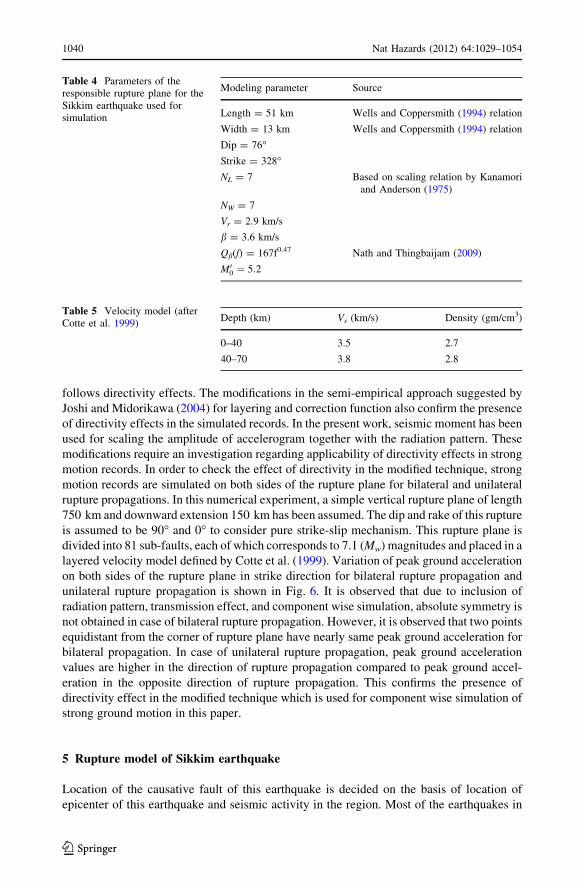
Table 4 Parameters of theresponsible rupture plane for theSikkim earthquake used forsimulation
Modeling parameter Source
Length = 51 km Wells and Coppersmith (1994) relation
Width = 13 km Wells and Coppersmith (1994) relation
Dip = 76�Strike = 328�NL = 7 Based on scaling relation by Kanamori
and Anderson (1975)
NW = 7
Vr = 2.9 km/s
b = 3.6 km/s
Qb(f) = 167f0.47 Nath and Thingbaijam (2009)
M00 ¼ 5:2
Table 5 Velocity model (afterCotte et al. 1999)
Depth (km) Vs (km/s) Density (gm/cm3)
0–40 3.5 2.7
40–70 3.8 2.8
1040 Nat Hazards (2012) 64:1029–1054
123
this region are predominantly strike-slip type and occur along north-west trending Tista
and Gangtok lineaments (Hazarika et al. 2010). The rupture responsible for this earthquake
is placed at a depth of 44 km between Tista and Gangtok lineaments. The rupture length
and width of the Sikkim earthquake has been calculated using the relation given by Wells
and Coppersmith (1994). This gives the length and width of rupture plane as 51 and 13 km,
respectively. The strike of rupture plane is assumed as parallel to Tista lineament as 328�N
which is close to that obtained from fault plane solution of this earthquake given by CMT
Harvard. The seismic moment of the aftershock of the Sikkim earthquake used for com-
puting stress drop is 7.9 9 1023 dyne cm (calculated from displacement spectra), which
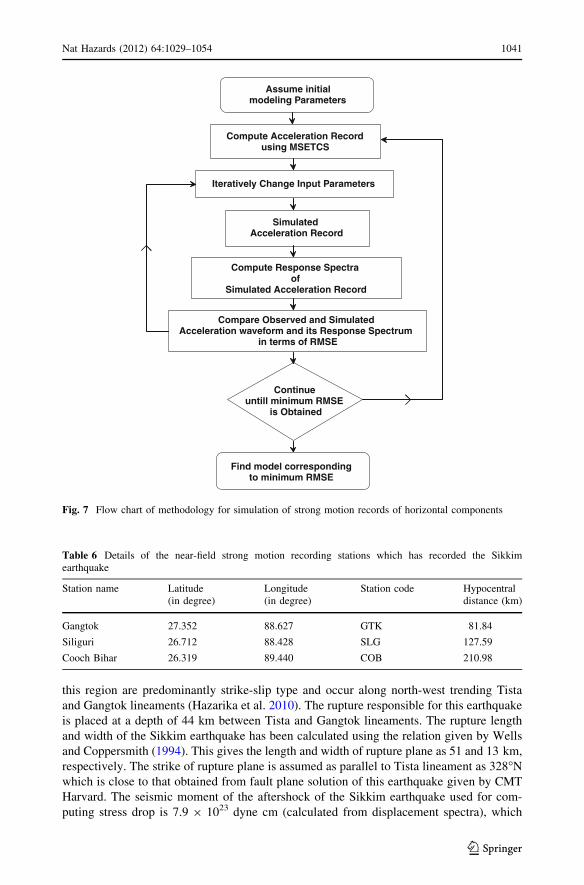
Table 6 Details of the near-field strong motion recording stations which has recorded the Sikkimearthquake
Station name Latitude(in degree)
Longitude(in degree)
Station code Hypocentraldistance (km)
Gangtok 27.352 88.627 GTK 81.84
Siliguri 26.712 88.428 SLG 127.59
Cooch Bihar 26.319 89.440 COB 210.98
Assume initial modeling Parameters
Compare Observed and Simulated Acceleration waveform and its Response Spectrum
in terms of RMSE
Find model corresponding to minimum RMSE
Simulated Acceleration Record
Continue untill minimum RMSE
is Obtained
Compute Acceleration Recordusing MSETCS
Iteratively Change Input Parameters
Compute Response Spectra of
Simulated Acceleration Record
Fig. 7 Flow chart of methodology for simulation of strong motion records of horizontal components
Nat Hazards (2012) 64:1029–1054 1041
123

further used for dividing the rupture plane of the target earthquake. The rupture plane of
target earthquake has been divided into 7 9 7 sub-faults of magnitude 5.2 (Mw) on the
basis of self-similarity law given by Kanamori and Anderson (1975). Parameters of the
rupture plane responsible for the Sikkim earthquake used for simulation are listed in
Table 4. The velocity model used for simulation of ground motion at different sites is that
given by Cotte et al. (1999) and defined in Table 5. Density value used in the velocity
model has been decided on the basis of relation between P-wave velocity and density of
earth medium given by Brocher (2005). The rupture plane of the target earthquake is
placed in the second layer of velocity model at a depth of 44 km. The parameters of final
88.00o 88.25o 88.50o 88.75o 89.00o 89.25o
26.75o
27.00o
27.25o
27.50o
27.75o
28.00o
MBT
MCT
TISTALN
.
GA
NG
TOK
LN.
KAN
CHEN
JUNG
AF.
LN
LEGEND
Strong Motion Station
GTK
SLG
COB
87.75o 89.50o
26.50o
26.25o
Fig. 8 Location of the fault rupture plane responsible for Sikkim earthquake of magnitude (Mw) 6.9.Triangles show the position of strong motion stations. MCT Main Central Thrust, MBT Main BoundaryThrust (Figure modified after Nath et al. 2005)
1042 Nat Hazards (2012) 64:1029–1054
123
rupture model are decided on the basis of quantitative comparison of observed and sim-
ulated acceleration waveform in terms of root mean square error. For the calculation of
root mean square error between simulated and observed record, following formula given
by Joshi and Midorikawa (2004) has been used:
PGA 59
PGA 59
PGA 59
PGA 62
PGA 63 PGA 70
PGA 82 PGA 158
PGA 156
PGA 157
0 45 90
-200
0
200 PGA 158
RMSE 0.48
25.0ESMR65.0ESMR16.0ESMR RMSE 0.49
PGA 61 PGA 61 PGA 81
25.0ESMR75.0ESMR65.0ESMR
PGA 62 PGA 62 PGA 65
45.0ESMR75.0ESMR65.0ESMR
RMSE 0.61 RMSE 0.56
RMSE 0.61
RMSE 0.52
RMSE 0.49
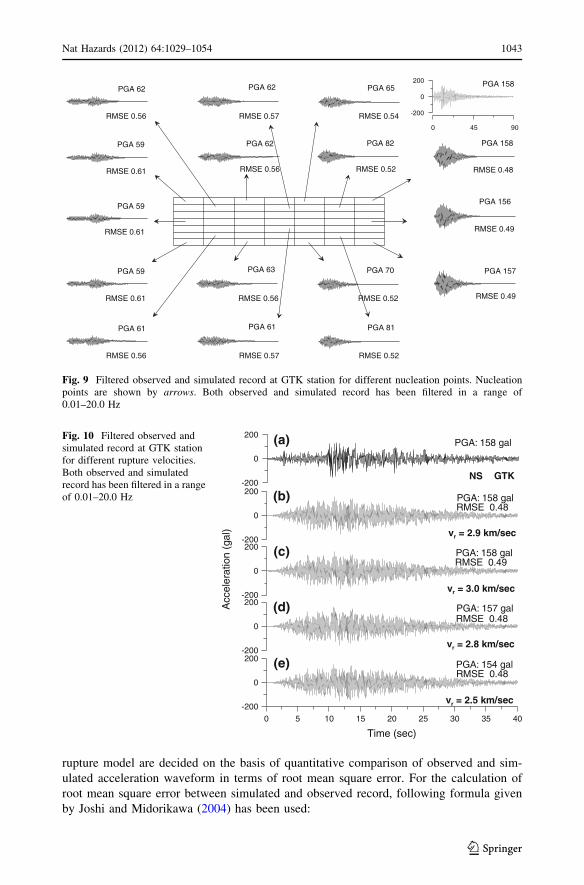
Fig. 9 Filtered observed and simulated record at GTK station for different nucleation points. Nucleationpoints are shown by arrows. Both observed and simulated record has been filtered in a range of0.01–20.0 Hz
NS
PGA: 158 gal
GTK-200
0
200
Acc
eler
atio
n (g
al)
PGA: 158 gal
vr = 2.9 km/sec-200
0
200
PGA: 154 gal
0 5 10 15 20 25 30 35 40
Time (sec)
-200
0
200
PGA: 158 gal
-200
0
200
PGA: 157 gal
-200
0
200
(a)
(b)
(e)
(c)
(d)vr = 3.0 km/sec
vr = 2.8 km/sec
vr = 2.5 km/sec
RMSE 0.48
RMSE 0.48
RMSE 0.49
RMSE 0.48
Fig. 10 Filtered observed andsimulated record at GTK stationfor different rupture velocities.Both observed and simulatedrecord has been filtered in a rangeof 0.01–20.0 Hz
Nat Hazards (2012) 64:1029–1054 1043
123

NS
PGA: 158 gal
GTK-200
0
200
Acc
eler
atio
n (g
al)
PGA: 158.4
δ = 76 -200
0
200
PGA: 158.8
-200
0
200
PGA: 158.5
-200
0
200
PGA: 158.7
-200
0
200
(a)
(b)
(e)
(c)
(d)
RMSE 0.49
RMSE 0.49
RMSE 0.49
RMSE 0.48
PGA: 158.9
0 5 10 15 20 25 30 35 40
Time (sec)
-200
0
200(f)
RMSE 0.49
δ = 75
δ = 74
δ = 73
δ = 72
Fig. 11 Filtered observed andsimulated record at GTK stationfor different dip angle. Bothobserved and simulated recordhas been filtered in a range of0.01–20.0 Hz
N 3280
760 DipV1= 3.5 km/s
V2= 3.8 km/s
Surface projection
Fig. 12 Source model of the Sikkim earthquake consisting 7 9 7 sub-faults placed in a layered mediumwith 328�N strike direction. Solid circle shows the starting position of rupture
1044 Nat Hazards (2012) 64:1029–1054
123
MCT
SAT
Ramgarh NAT
Moradabad Fault
Fault
MBT
Martoli
Thrust
Kali
Riv
er
NEPAL
BHUTAN
TIBET
78o 80o 82o84o 86o 88o 90o 92o
24o
26o
28o
30o
32o
LEGEND
Epicenter (USGS)DEQ Strong Motion StationsKumaon Strong Motion Stations
80o 81o79o
29o
30o
CMO
UDH
CHP
BHAG BERI
MUAV
PITH
BALJAUL
Ophiolite/ Melange
Crystalline complex overprinted byHimalayan fold- thrust movement
Older folded cover sequenceoverprinted by Himalayanfold- thrust movement
Older cover sequence folded during Himalayan fold- thrust movement
Thrust
Location of stations of Kumaonstrong motion network
Minor Lineament
Fault
LEGEND
Location of stations of DEQ strong motion network
88.00o 88.25 o 88.50o 88.75o 89.00o 89.25o
26.75o
27.00o
27.25o
27.50o
27.75o
28.00o
LEGEND
Epicenter LocationStrong Motion Station
GTK
SLG
COBKOK
87.75o 89.50o
26.50o
26.25o
89.75 o 90.00o 90.25o 90.50o
RAX
MLD
BHUTAN
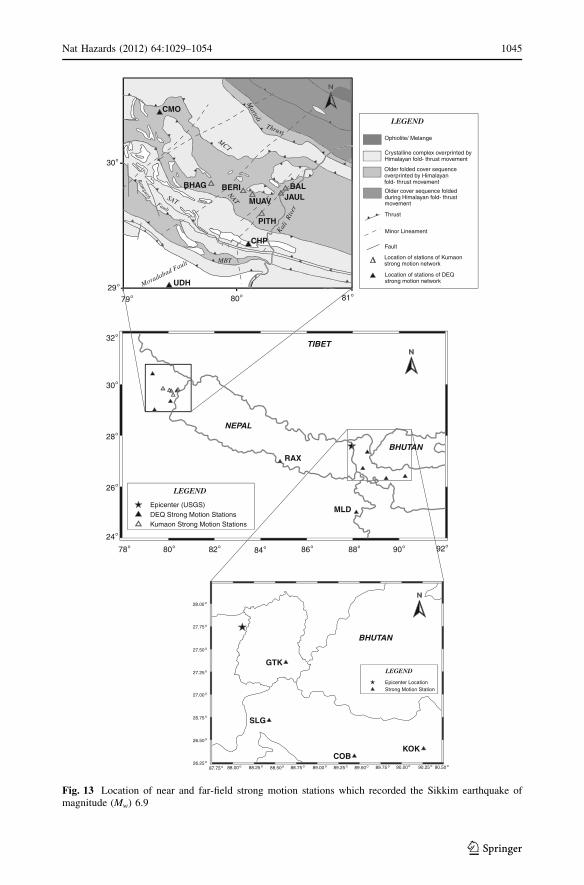
Fig. 13 Location of near and far-field strong motion stations which recorded the Sikkim earthquake ofmagnitude (Mw) 6.9
Nat Hazards (2012) 64:1029–1054 1045
123
RMSE ¼ 1=N �XN
i¼1
af ið Þ � as ið Þas ið Þ
2" #1=2
ð17Þ
where RMSE is root mean square error of N samples of observed af(i) and simulated as(i)records. The flow graph showing procedure of iterative modeling is shown in Fig. 7.
30 35 40 45 50 55 60 65 70
Time (sec)
-200
-100
0
100
200
NS
PGA: 158 gal
GTK
30 35 40 45 50 55 60 65 70
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 149 gal
GTK
NS
PGA: 158 gal
GTK
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 136 gal
GTK
50 55 60 65 70 75 80 85 90
Time (sec)
-200
-100
0
100
200
NS
PGA: 58 gal
COB
50 55 60 65 70 75 80 85 90
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 44 gal
COB
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
NS
PGA: 129 gal
COB
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 99 gal
COB
25 30 35 40 45 50 55 60 65
Time (sec)
-200
-100
0
100
200
NS
PGA: 201 gal
SLG
25 30 35 40 45 50 55 60 65
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 156 gal
SLG
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
NS
PGA: 246 gal
SLG
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
Acc
eler
atio
n (g
al)
EW
PGA: 169 gal
SLG
0 5 10 15 20 25 30 35 40
Time (sec)
-200
-100
0
100
200
(a) (b)Obs.
Syn.
Obs.
Syn.
Obs.
Syn.
Obs.
Syn.
Obs.
Syn.
Obs.
Syn.
(c) (d)
(i) (j)
(k) (l)
(e) (f)
(g) (h)
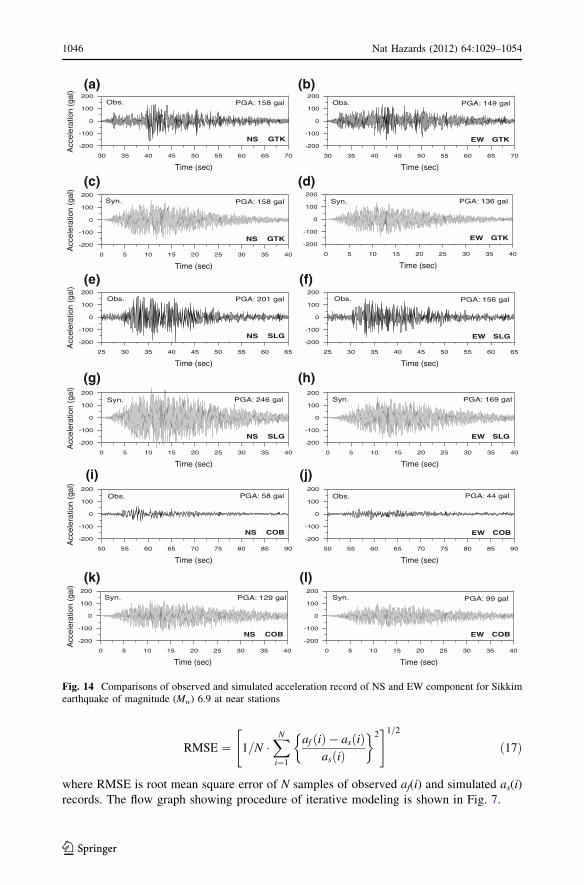
Fig. 14 Comparisons of observed and simulated acceleration record of NS and EW component for Sikkimearthquake of magnitude (Mw) 6.9 at near stations
1046 Nat Hazards (2012) 64:1029–1054
123
Simulations have been made at GTK, SIL, and COB stations that lie within a epicentral
distance of 206 km. Details of these stations are given in Table 6 and its location is shown
in Fig. 8. Location of nucleation point is an important parameter in strong motion simu-
lation; in the present work, final selection of nucleation point is based on the comparison of
observed and simulated NS component obtained from various models at GTK station. In
order to compare the simulated record with the observed acceleration record, the simulated
acceleration records have been band-passed through a filter in a range of 0.01–20.0 Hz
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) LegendObs.Syn.
NS GTK
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) EW GTK
(a) (b)
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) NS COB
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) EW COB
(e) (f)
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) NS SLG
0.1 1
Period (sec)
10
100
1000
10000
Pse
udo
Acc
. (cm
/sec
2 ) EW SLG
(c) (d)
50.0250.02
50.02 50.02
50.02 50.02
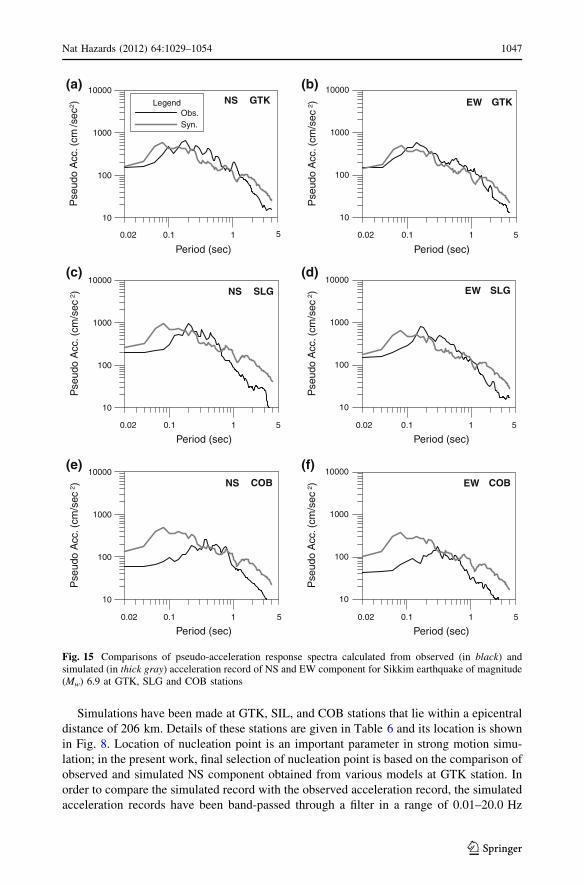
Fig. 15 Comparisons of pseudo-acceleration response spectra calculated from observed (in black) andsimulated (in thick gray) acceleration record of NS and EW component for Sikkim earthquake of magnitude(Mw) 6.9 at GTK, SLG and COB stations
Nat Hazards (2012) 64:1029–1054 1047
123
which is used for the processing of observed acceleration record at different stations. Root
mean square error between observed and simulated waveform has been calculated for each
cases. Various simulated records and its comparison with observed record in terms of root
mean square error for different possibilities of nucleation point are shown in Fig. 9. The
comparison in terms of root mean square error suggests location of the nucleation point in
the extreme north-west corner of rupture plane at a depth of 47 km and has been retained
for further use. In all models used for selecting nucleation point, rupture velocity and dip
angle have been assumed as 2.9 km/s and 14�, respectively. The effect of rupture velocity
and the dip angle in the rupture model has been checked in the present work. Various
rupture velocity ranging from 2.5 to 3.0 km/s have been considered for simulating NS
component of acceleration record at GTK station. Figure 10 shows the comparison of
observed and simulated acceleration record for considering rupture velocity 2.5, 2.8, 2.9,
and 3.0 km/s. Based on minimum root mean square error, rupture velocity 2.9 km/s has
been used as final rupture velocity for further simulations. In order to check the depen-
dency of dip angle in the simulation, rupture model has been tested on few dip angles
ranging from 72� to 76�. From Fig. 11, it is observed that there is no drastic change in the
peak ground acceleration parameter and in the root mean square error. Based on this
observation, dip angle 76� has been used for simulation of ground motion of Sikkim
earthquake. Final rupture model of the Sikkim earthquake is shown in Fig. 12.
6 Near-field simulation of strong motion record
Acceleration records have been simulated at three near-field stations using final rupture
parameters given in Table 4. Location of near-field and far-field strong motion stations is
shown in Fig. 13. Comparison of observed and simulated acceleration record at GTK,
SLG, and COB stations is shown in Fig. 14, and it shows that simulated record bears
realistic shape as that of observed record and the peak ground acceleration of observed and
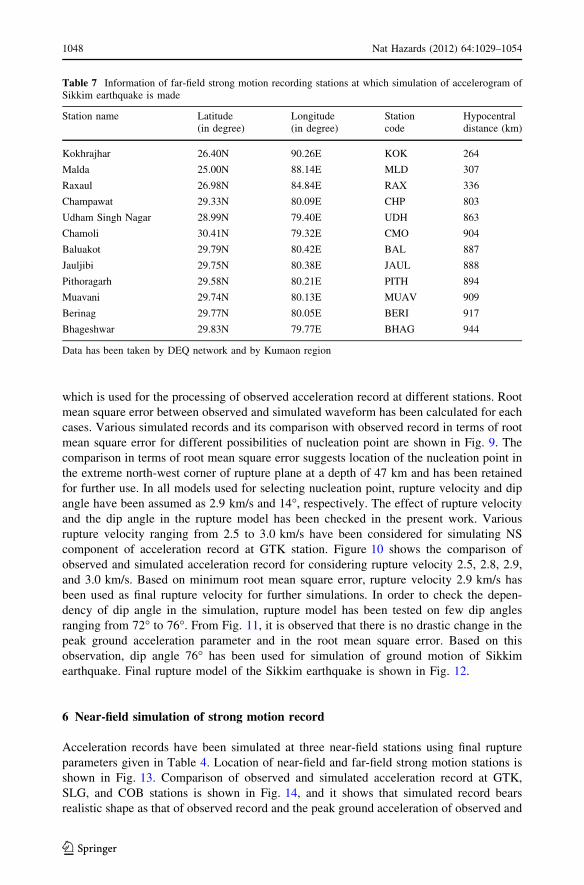
Table 7 Information of far-field strong motion recording stations at which simulation of accelerogram ofSikkim earthquake is made
Station name Latitude(in degree)
Longitude(in degree)
Stationcode
Hypocentraldistance (km)
Kokhrajhar 26.40N 90.26E KOK 264
Malda 25.00N 88.14E MLD 307
Raxaul 26.98N 84.84E RAX 336
Champawat 29.33N 80.09E CHP 803
Udham Singh Nagar 28.99N 79.40E UDH 863
Chamoli 30.41N 79.32E CMO 904
Baluakot 29.79N 80.42E BAL 887
Jauljibi 29.75N 80.38E JAUL 888
Pithoragarh 29.58N 80.21E PITH 894
Muavani 29.74N 80.13E MUAV 909
Berinag 29.77N 80.05E BERI 917
Bhageshwar 29.83N 79.77E BHAG 944
Data has been taken by DEQ network and by Kumaon region
1048 Nat Hazards (2012) 64:1029–1054
123

simulated record is also comparable. Pseudo-acceleration response spectra at 5 % damping
have been generated from observed and simulated acceleration record and are compared in
Fig. 15. Comparisons of response spectrum suggest the both simulated and observed
response spectra give a comparable match in the response spectra at all near-field stations.
This confirms the suitability of the model and its selected parameters for generation of
strong ground motion for both NS and EW components.
0 50 100
-3
0
3
0 50 100
-3
0
3-3
0
3
-3
0
3
NS BAL
PGA= 2
EW BAL
PGA= 2.8
2.2=AGP4.2=AGP
0 50 100
-3
0
3
0 50 100
-3
0
3-3
0
3
-3
0
3
NS JAUL
PGA= 1.8
EW JAUL
PGA= 2.5
PGA= 2.3 PGA= 2.1
0 50 100
-3
0
3
0 50 100
-3
0
3-3
0
3
-3
0
3
NS PITH
PGA= 3
EW PITH
PGA= 3
PGA= 2 PGA= 1.8
0 50 100
-3
0
3
0 50 100
-3
0
3-3
0
3
-3
0
3
NS MUAV
PGA= 1.7
EW MUAV
PGA= 1.3
PGA= 2.5 PGA= 2
0 50 100Time (sec)
-3
0
3
0 50 100Time (sec)
-3
0
3-3
0
3
-3
0
3
NS BERI
PGA= 0.6
EW BERI
PGA= 0.7
PGA= 2.1 PGA= 1.9
0 50 100Time (sec)
-3
0
3
0 50 100Time (sec)
-3
0
3-3
0
3
-3
0
3
NS BHAG
PGA= 1.3
EW BHAG
PGA= 1.5
PGA= 2 PGA= 1.8
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
0 20 40 60 80
-100
0
100
0 20 40 60 80
-100
0
100-100
0
100
-100
0
100
NS KOK
PGA= 52
EW KOK
PGA= 43
PGA= 58 PGA= 35
0 20 40 60 80
-40
0
40
0 20 40 60 80
-40
0
40-40
0
40
-40
0
40
NS MLD
PGA= 23
EW MLD
PGA= 23
PGA= 24 PGA= 19
0 20 40 60 80
-40
0
40
0 20 40 60 80
-40
0
40-40
0
40
-40
0
40
NS RAX
PGA= 27
EW RAX
PGA= 20
23=AGP6=AGP
0 20 40 60 80
-3
0
3
0 20 40 60 80
-3
0
3-3
0
3
-3
0
3
NS CHP
PGA= 2
EW CHP
PGA= 2
PGA= 0.5 PGA= 0.7
0 20 40 60 80
Time (sec)
-3
0
3
0 20 40 60 80
Time (sec)
-3
0
3-3
0
3
-3
0
3
NS UDH
PGA= 2
EW UDH
PGA= 2
5.1=AGP1=AGP
0 20 40 60 80
Time (sec)
-3
0
3
0 20 40 60 80
Time (sec)
-3
0
3-3
0
3
-3
0
3
NS CMO
PGA= 2
EW CMO
PGA= 1
PGA= 0.7 PGA= 0.8
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Acc
eler
atio
n (g
al)
Fig. 16 Comparison of NS and EW component of observed and simulated acceleration record at differentstrong motion stations which placed at an epicentral distance of 260–903 km range. Station codes and peakground acceleration values for observed (in black) and simulated (in gray) acceleration record are indicatedin different plot
Nat Hazards (2012) 64:1029–1054 1049
123
7 Far-field simulation of strong motion record
Simulations using the same rupture model have been made at twelve far-field stations.
These includes six station managed by the Department of Earthquake Engineering and six
0.1 1
Period (sec)
0.1
1
10
100
1000NS BAL
0.1 1
Period (sec)
0.1
1
10
100
1000EW BAL
0.1 1
Period (sec)
0.1
1
10
100
1000NS BERI
0.1 1
Period (sec)
0.1
1
10
100
1000EW BERI
0.1 1
Period (sec)
0.1
1
10
100
1000NS PITH
0.1 1
Period (sec)
0.1
1
10
100
1000EW PITH
0.1 1
Period (sec)
0.1
1
10
100
1000NS JAUL
0.1 1
Period (sec)
0.1
1
10
100
1000EW JAUL
0.1 1
Period (sec)
0.1
1
10
100
1000NS BHAG
0.1 1
Period (sec)
0.1
1
10
100
1000EW BHAG
0.1 1
Period (sec)
0.1
1
10
100
1000NS MUAV
0.1 1
Period (sec)
0.1
1
10
100
1000EW MUAV
50.0250.0250.0250.02
50.0250.0250.0250.02
50.0250.0250.0250.02
0.1 1
Period (sec)
1
10
100
1000
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
Pse
udo
Acc
. (cm
/sec
2 )P
seud
o A
cc. (
cm/s
ec2 )
NS KOK
0.1 1
Period (sec)
1
10
100
1000EW KOK
0.1 1
Period (sec)
0.1
1
10
100
1000NS UDH
0.1 1
Period (sec)
0.1
1
10
100
1000EW UDH
0.1 1
Period (sec)
0.1
1
10
100
1000NS RAX
0.1 1
Period (sec)
1
10
100
1000EW RAX
0.1 1
Period (sec)
1
10
100
1000NS MLD
0.1 1
Period (sec)
1
10
100
1000EW MLD
0.1 1
Period (sec)
0.1
1
10
100
1000NS CMO
0.1 1
Period (sec)
0.1
1
10
100
1000EW CMO
0.1 1
Period (sec)
0.1
1
10
100
1000NS CHP
0.1 1
Period (sec)
0.01
0.1
1
10
100
1000EW CHP
50.0250.0250.0250.02
50.0250.0250.0250.02
50.0250.0250.0250.02
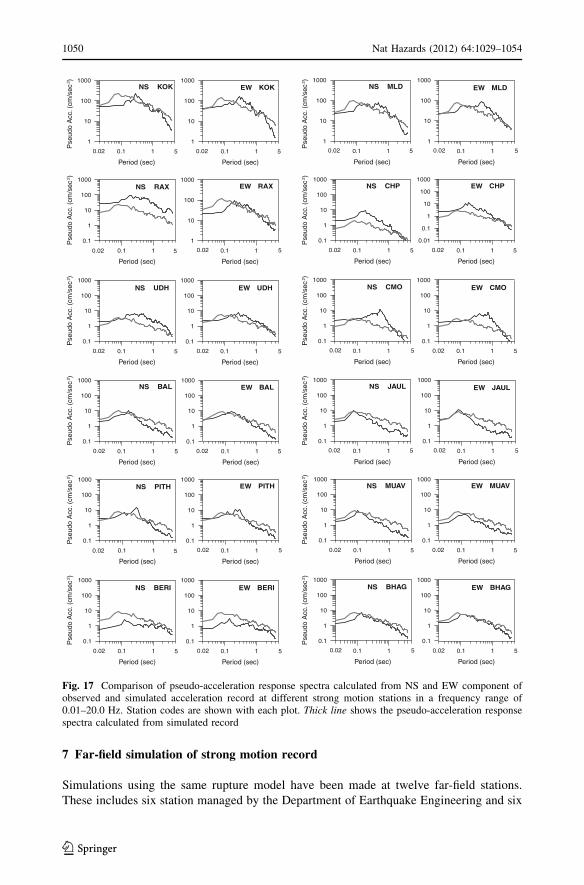
Fig. 17 Comparison of pseudo-acceleration response spectra calculated from NS and EW component ofobserved and simulated acceleration record at different strong motion stations in a frequency range of0.01–20.0 Hz. Station codes are shown with each plot. Thick line shows the pseudo-acceleration responsespectra calculated from simulated record
1050 Nat Hazards (2012) 64:1029–1054
123
in the Kumaon network managed by the Department of Earth Sciences. Stations of Ku-
maon network are placed at an epicentral distance ranging between 886 and 944 km.
Information of these far-field stations is given in Table 7 at which ground motion record
has been simulated by using the technique given in the present paper. The simulated NS
and EW component of acceleration record has been compared with the observed accel-
eration record in the same frequency range as used for its processing and is shown in
Fig. 16. A pseudo-acceleration response spectrum has been computed for simulated and
observed record and their comparison is shown in Fig. 17.
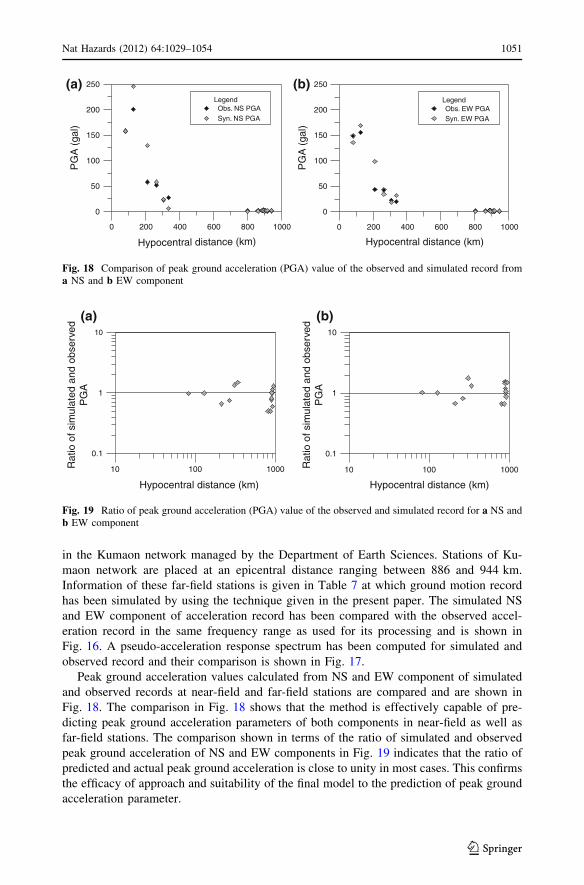
Peak ground acceleration values calculated from NS and EW component of simulated
and observed records at near-field and far-field stations are compared and are shown in
Fig. 18. The comparison in Fig. 18 shows that the method is effectively capable of pre-
dicting peak ground acceleration parameters of both components in near-field as well as
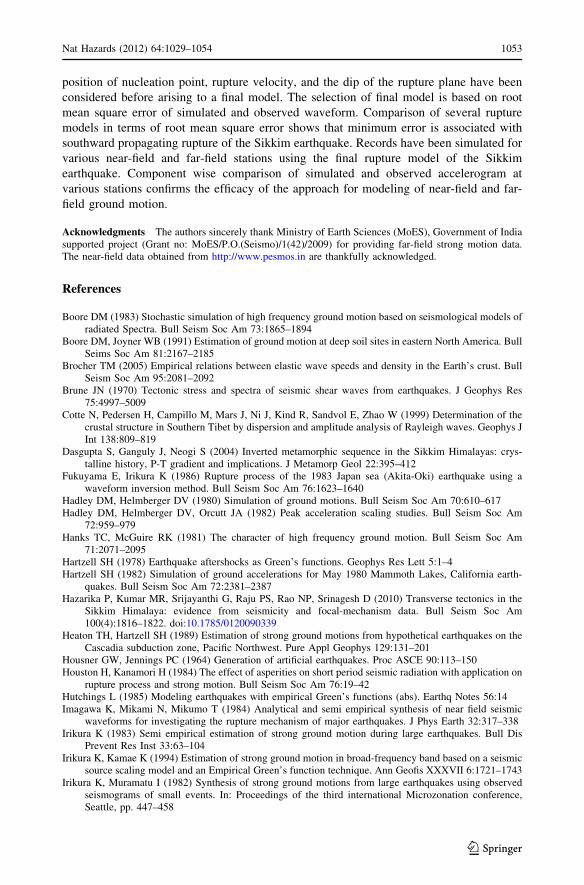
far-field stations. The comparison shown in terms of the ratio of simulated and observed
peak ground acceleration of NS and EW components in Fig. 19 indicates that the ratio of
predicted and actual peak ground acceleration is close to unity in most cases. This confirms
the efficacy of approach and suitability of the final model to the prediction of peak ground
acceleration parameter.
Hypocentral distance (km)
0
50
100
150
200
250P
GA
(ga
l)
LegendObs. NS PGASyn. NS PGA
Hypocentral distance (km)
0
50
100
150
200
250
PG
A (
gal)
LegendObs. EW PGASyn. EW PGA
(a) (b)
0 200 400 600 800 1000 0 200 400 600 800 1000
Fig. 18 Comparison of peak ground acceleration (PGA) value of the observed and simulated record froma NS and b EW component
Hypocentral distance (km)
0.1
1
10
Rat
io o
f sim
ulat
ed a
nd o
bser
ved
PG
A
10 100 100010 100 1000
Hypocentral distance (km)
0.1
1
10
Rat
io o
f sim
ulat
ed a
nd o
bser
ved
PG
A(a) (b)
Fig. 19 Ratio of peak ground acceleration (PGA) value of the observed and simulated record for a NS andb EW component
Nat Hazards (2012) 64:1029–1054 1051
123

The simulations made from present technique at near-field and far-field stations are
quantitatively compared with observed records. The quantitative comparison of simulated
and observed record has been made in terms of root mean square error given in Eq. (17).
The calculated root mean square error between observed and simulated records and its
response spectra are given in Table 8. It is seen that root mean square error between
observed and simulated accelerogram varies from 0.46 to 0.56 at the near-field stations and
from 0.32 to 0.62 at the far-field stations, respectively. The root mean square error between
response spectrums of observed and simulated records varies from 0.65 to 2.58 at the near-
field stations and from 0.34 to 2.28 at the far-field stations, respectively. The quantitative
comparison indicates that the range of uncertainty in simulated and observed acceleration
record at far-field stations are higher as compared to the near-field stations. This may be
resulted from several factors which are actually present in the ray path between source and
far-field recording stations which are not included in the present approach of simulation.
These effects include large-scale crustal deformation and heterogeneities present in the
path between source and receiver for far-field stations.
8 Conclusions
This paper presents modified semi-empirical approach given by Midorikawa (1993) for
component wise simulation of strong ground motion. Modifications in the semi-empirical
approach are made to remove dependency of this method purely on attenuation relation. In
the present work, seismic moment is used in place of attenuation relation to scale the
envelope function used in semi-empirical approach. The method has been tested for
simulation of near-field and far-field acceleration record of the Sikkim earthquake
(Mw = 6.9) of September 18, 2011. Several possibilities of modeling parameters like
Table 8 Estimated RMSEbetween observed and simulatedacceleration record and itsresponse spectrum
Stations RMSE between observed andsimulated acceleration timeseries
RMSE between observedand simulated responsespectrum
NS EW NS EW
GTK 0.48 0.46 0.87 0.65
SLG 0.46 0.56 2.58 1.19
COB 0.53 0.52 1.84 2.28
KOK 0.57 0.58 1.18 1.55
MLD 0.47 0.47 1.03 0.34
RAX 0.62 0.43 0.78 0.81
CHP 0.46 0.45 0.49 0.65
UDH 0.35 0.32 0.54 0.38
CMO 0.54 0.55 1.03 0.74
BAL 0.42 0.43 2.08 1.96
JAUL 0.46 0.48 2.00 2.28
PITH 0.37 0.37 1.84 1.40
MUAV 0.39 0.40 2.20 1.51
BERI 0.54 0.55 1.30 1.40
BHAG 0.50 0.53 1.27 1.08
1052 Nat Hazards (2012) 64:1029–1054
123
position of nucleation point, rupture velocity, and the dip of the rupture plane have been
considered before arising to a final model. The selection of final model is based on root
mean square error of simulated and observed waveform. Comparison of several rupture
models in terms of root mean square error shows that minimum error is associated with
southward propagating rupture of the Sikkim earthquake. Records have been simulated for
various near-field and far-field stations using the final rupture model of the Sikkim
earthquake. Component wise comparison of simulated and observed accelerogram at
various stations confirms the efficacy of the approach for modeling of near-field and far-
field ground motion.
Acknowledgments The authors sincerely thank Ministry of Earth Sciences (MoES), Government of Indiasupported project (Grant no: MoES/P.O.(Seismo)/1(42)/2009) for providing far-field strong motion data.The near-field data obtained from http://www.pesmos.in are thankfully acknowledged.
References
Boore DM (1983) Stochastic simulation of high frequency ground motion based on seismological models ofradiated Spectra. Bull Seism Soc Am 73:1865–1894
Boore DM, Joyner WB (1991) Estimation of ground motion at deep soil sites in eastern North America. BullSeims Soc Am 81:2167–2185
Brocher TM (2005) Empirical relations between elastic wave speeds and density in the Earth’s crust. BullSeism Soc Am 95:2081–2092
Brune JN (1970) Tectonic stress and spectra of seismic shear waves from earthquakes. J Geophys Res75:4997–5009
Cotte N, Pedersen H, Campillo M, Mars J, Ni J, Kind R, Sandvol E, Zhao W (1999) Determination of thecrustal structure in Southern Tibet by dispersion and amplitude analysis of Rayleigh waves. Geophys JInt 138:809–819
Dasgupta S, Ganguly J, Neogi S (2004) Inverted metamorphic sequence in the Sikkim Himalayas: crys-talline history, P-T gradient and implications. J Metamorp Geol 22:395–412
Fukuyama E, Irikura K (1986) Rupture process of the 1983 Japan sea (Akita-Oki) earthquake using awaveform inversion method. Bull Seism Soc Am 76:1623–1640
Hadley DM, Helmberger DV (1980) Simulation of ground motions. Bull Seism Soc Am 70:610–617Hadley DM, Helmberger DV, Orcutt JA (1982) Peak acceleration scaling studies. Bull Seism Soc Am
72:959–979Hanks TC, McGuire RK (1981) The character of high frequency ground motion. Bull Seism Soc Am
71:2071–2095Hartzell SH (1978) Earthquake aftershocks as Green’s functions. Geophys Res Lett 5:1–4Hartzell SH (1982) Simulation of ground accelerations for May 1980 Mammoth Lakes, California earth-
quakes. Bull Seism Soc Am 72:2381–2387Hazarika P, Kumar MR, Srijayanthi G, Raju PS, Rao NP, Srinagesh D (2010) Transverse tectonics in the
Sikkim Himalaya: evidence from seismicity and focal-mechanism data. Bull Seism Soc Am100(4):1816–1822. doi:10.1785/0120090339
Heaton TH, Hartzell SH (1989) Estimation of strong ground motions from hypothetical earthquakes on theCascadia subduction zone, Pacific Northwest. Pure Appl Geophys 129:131–201
Housner GW, Jennings PC (1964) Generation of artificial earthquakes. Proc ASCE 90:113–150Houston H, Kanamori H (1984) The effect of asperities on short period seismic radiation with application on
rupture process and strong motion. Bull Seism Soc Am 76:19–42Hutchings L (1985) Modeling earthquakes with empirical Green’s functions (abs). Earthq Notes 56:14Imagawa K, Mikami N, Mikumo T (1984) Analytical and semi empirical synthesis of near field seismic
waveforms for investigating the rupture mechanism of major earthquakes. J Phys Earth 32:317–338Irikura K (1983) Semi empirical estimation of strong ground motion during large earthquakes. Bull Dis
Prevent Res Inst 33:63–104Irikura K, Kamae K (1994) Estimation of strong ground motion in broad-frequency band based on a seismic
source scaling model and an Empirical Green’s function technique. Ann Geofis XXXVII 6:1721–1743Irikura K, Muramatu I (1982) Synthesis of strong ground motions from large earthquakes using observed
seismograms of small events. In: Proceedings of the third international Microzonation conference,Seattle, pp. 447–458
Nat Hazards (2012) 64:1029–1054 1053
123
Irikura K, Kagawa T, Sekiguchi H (1997) Revision of the empirical Green’s function method by Irikura,1986. Programme and abstracts. Seismol Soc Jpn 2:B25
Joshi A (2004) A simplified technique for simulating wide band strong ground motion for two recentHimalaya earthquakes. Pure Appl Geophys 161:1777–1805
Joshi A, Midorikawa S (2004) A simplified method for simulation of strong ground motion using rupturemodel of the earthquake source. J Seism 8:467–484
Joshi A, Mohan K (2008) Simulation of accelerograms from simplified deterministic approach for the 23rdOctober 2004 Niigata-ken Chuetsu earthquake. J Seismol 12:35–51
Joshi A, Singh S, Giroti K (2001) The simulation of ground motions using envelope summations. Pure ApplGeophys 158:877–901
Joshi A, Mohanty M, Bansal AR, Dimri VP, Chadha RK (2010) Use of spectral acceleration data fordetermination of three-dimensional attenuation structure in the Pithoragarh region of KumaonHimalaya. J Seism 14:247–272
Joshi A, Pushpa K, Sharma ML, Ghosh AK, Agarwal MK, Ravikiran A (2012) A strong motion model of the2004 great Sumatra earthquake: simulation using a modified semi empirical method. J Earthq Tsunami(in press)
Joyner WB, Boore DM (1988) Measurement, characterization and prediction of strong ground motion. In:Proceedings of earthquake engineering and soil dynamics II, Utah, June 27–30, pp 43–100
Kameda H, Sugito M (1978) Prediction of strong earthquake motions by evolutionary process model. In:Proceedings of the sixth Japan earthquake engineering symposium, pp 41–48
Kanamori H (1979) A semi empirical approach to prediction of long period ground motions from greatearthquakes. Bull Seism Soc Am 69:1645–1670
Kanamori H, Anderson DL (1975) Theoretical basis of some empirical relations in seismology. Bull SeismSoc Am 65:1073–1095
Kayal JR (2001) Microearthquake activity in some parts of the Himalaya and tectonic model. Tectono-physics 339:331–351
Khattri KN, Zeng Y, Anderson JG, Brune J (1994) Inversion of strong motion waveforms for source slipfunction of 1991 Uttarkashi earthquake, Himalaya. J Himalayan Geol 5:163–191
Lai SP (1982) Statistical characterization of strong ground motions using power spectral density function.Bull Seism Soc Am 72:259–274
Lay T, Wallace TC (1995) Modern global seismology. Academic Press, California 521 ppMcGuire RK, Becker AM, Donovan NC (1984) Spectral estimates of seismic shear waves. Bull Seism Soc
Am 74:2167–2185Midorikawa S (1989) Synthesis of ground acceleration of large earthquakes using acceleration envelope
waveform of small earthquake. J Struct Construct Eng 398:23–30Midorikawa S (1993) Semi empirical estimation of peak ground acceleration from large earthquakes.
Tectonophysics 218:287–295Mikumo T, Irikura K, Imagawa K (1981) Near field strong motion synthesis from foreshock and aftershock
records and rupture process of the main shock fault (abs.). IASPEI 21st General Assembly, LondonMunguia L, Brune JM (1984) Simulations of strong ground motions for earthquakes in the Mexicali-
Imperial Valley. In: Proceedings of workshop on strong ground motion simulation and earthquakeengineering applications, Pub. 85-02. Earthquake Engineering Research Institute, Los Altos, California21-1-21-19
Nath SK, Thingbaijam KKS (2009) Seismic hazard assessment—a holistic microzonation approach. NatHazards Earth Syst Sci 9:1445–1459
Nath SK, Vyas M, Pal I, Sengupta P (2005) A Seismic hazard scenario in the Sikkim Himalaya fromseismotectonics, spectral amplification, source parameterization and spectral attenuation laws usingstrong motion seismometry. J Geophy Res 110:B01301. doi:10.1029/2004JB003199
Sinozuka M, Sato Y (1967) Simulation of nonstationary random process. Proc ASCE 93:11–40Tapponnier P, Molnar P (1977) Active faulting and tectonics in China. J Geophy Res 82:2905–2930Wells LD, Coppersmith KJ (1994) New empirical relationships among magnitude, rupture length, rupture
width, rupture area and surface displacement. Bull Seism Soc Am 84:974–1002Yu G (1994) Some aspects of earthquake seismology: slip portioning along major convergent plate
boundaries: composite source model for estimation of strong motion and non linear soil responsemodeling. Ph.D. thesis, University of Nevada
Yu G, Khattri KN, Anderson JG, Brune JN, Zeng Y (1995) Strong ground motion from the Uttarkashi,Himalaya, India, earthquake: comparison of observations with synthetics using the composite sourcemodel. Bull Seism Soc Am 85:31–50
Zeng Y, Anderson JG, Su F (1994) A composite source model for computing realistic synthetic strongground motions. Geophys Res Lett 21:725–728
1054 Nat Hazards (2012) 64:1029–1054
123
Related Documents











