i İÇİNDEKİLER Sayfa İÇİNDEKİLER …………………………………………................................. i ÖZET …………………………………………………………………............ iii ABSTRACT …………………………………………….................................. iv ÖNSÖZ VE TEŞEKKÜR……………………………….................................. v ŞEKİLLER DİZİNİ ………………………………………………………….. vi ÇİZELGELER DİZİNİ ………………………………………………………. viii 1.GİRİŞ……………………………………………………………………….. 1 1.1. GENEL…………………………………………………………………... 1 1.2. ÇALIŞMANIN AMACI VE KAPSAMI……………………………........ 2 2. MATERYAL VE YÖNTEM...…………………………………………….. 3 2.1. MATERYAL…………………………………………………………….. 3 2.1.1. VERİ SAKLAMA ELEMANLAR…………………………………….. 3 2.1.1.1. Flip-Fflop ...………………………………………………….............. 3 2.1.1.2. Latch İle Flıp-Flop Arasındaki Farklar ...……………………………. 4 2.1.2. CLOCK İŞARETİ ...………………………………………………........ 5 2.1.3 FLIP-FLOP VE LATCH PARAMETRELERİ ...…................................ 6 2.1.3.1.KURMA VE TUTMA ZAMANLARI (Set-up, Hold Time) ………… 6 2.1.3.1.1. Kurma Zamanı (set-up time, ts) …………….................................... 6 2.1.3.1.2. Tutma Zamanı (hold time, th) …..…………………………. 6 2.1.3.1.3. Yayılım Gecikmesi (Propagation Detay-tpd ) ve Yayılım hızı ( Propagation Speed ) ...……………………………..…………………………. 7 2.1.3.1.4. CLOCK SKEW ...…………………………………………………. 7 2.1.4.SAYISAL ENTEGRE TERMİNOLOJİSİ ...…....................................... 11 2.1.4.1. Güç Harcaması ( Power Dissipation ) ...…………………................... 11 2.1.4.2. Çıkış Kapasitesi ( fan out ) ...………….…........................................... 11 2.1.4.3. Gürültü Bağışıklığı ( Noise Immunity-Noise Magrin )…………........ 11 2.1.4.4. Emniyet payı ...……………………………………………................. 11 2.1.4.5. Hız-Güç üretimi (Speed – Power Product) ……………….................. 12 2.1.4.6. Besleme Gerilimi ve Çalışma Isısı ...………....................................... 12 2.1.5. TAMAMLAYICI MOS LOJİK ( CMOS ) TEKNOLOJİSİ ………….. 13 2.1.5.1. CMOS Entegrelerin Özellikleri …………………………………….. 10 2.1.5.1.1. CMOS Entegrelerde Kullanılan Seriler ..………………….............. 13 2.1.5.1.2. Besleme Gerilimi ve Gerilim seviyeleri…………………………… 14 2.1.5.1.3. Gürültü Sınırları……………………………………………………. 14 2.1.5.1.4. Güç Harcaması ………………………………………...................... 14 2.1.5.1.5. Fan Out ………………………………………………….................. 17 2.1.5.1.6. Anahtarlama Hızı …………………………………………………. 18

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

i
İÇİNDEKİLER Sayfa
İÇİNDEKİLER …………………………………………................................. i ÖZET …………………………………………………………………............ iii ABSTRACT …………………………………………….................................. iv ÖNSÖZ VE TEŞEKKÜR……………………………….................................. v ŞEKİLLER DİZİNİ ………………………………………………………….. vi ÇİZELGELER DİZİNİ ………………………………………………………. viii 1.GİRİŞ……………………………………………………………………….. 1 1.1. GENEL…………………………………………………………………... 1 1.2. ÇALIŞMANIN AMACI VE KAPSAMI……………………………........ 2 2. MATERYAL VE YÖNTEM...…………………………………………….. 3
2.1. MATERYAL…………………………………………………………….. 3
2.1.1. VERİ SAKLAMA ELEMANLAR…………………………………….. 3
2.1.1.1. Flip-Fflop ...………………………………………………….............. 3
2.1.1.2. Latch İle Flıp-Flop Arasındaki Farklar ...……………………………. 4
2.1.2. CLOCK İŞARETİ ...………………………………………………........ 5
2.1.3 FLIP-FLOP VE LATCH PARAMETRELERİ ...…................................ 6
2.1.3.1.KURMA VE TUTMA ZAMANLARI (Set-up, Hold Time) ………… 6
2.1.3.1.1. Kurma Zamanı (set-up time, ts) …………….................................... 6 2.1.3.1.2. Tutma Zamanı (hold time, th) …..…………………………. 6 2.1.3.1.3. Yayılım Gecikmesi (Propagation Detay-tpd ) ve Yayılım hızı (
Propagation Speed ) ...……………………………..………………………….
7 2.1.3.1.4. CLOCK SKEW ...…………………………………………………. 7
2.1.4.SAYISAL ENTEGRE TERMİNOLOJİSİ ...…....................................... 11
2.1.4.1. Güç Harcaması ( Power Dissipation ) ...…………………................... 11
2.1.4.2. Çıkış Kapasitesi ( fan out ) ...………….…........................................... 11
2.1.4.3. Gürültü Bağışıklığı ( Noise Immunity-Noise Magrin )…………........ 11
2.1.4.4. Emniyet payı ...……………………………………………................. 11 2.1.4.5. Hız-Güç üretimi (Speed – Power Product) ……………….................. 12 2.1.4.6. Besleme Gerilimi ve Çalışma Isısı ...………....................................... 12
2.1.5. TAMAMLAYICI MOS LOJİK ( CMOS ) TEKNOLOJİSİ ………….. 13
2.1.5.1. CMOS Entegrelerin Özellikleri …………………………………….. 10
2.1.5.1.1. CMOS Entegrelerde Kullanılan Seriler ..………………….............. 13
2.1.5.1.2. Besleme Gerilimi ve Gerilim seviyeleri…………………………… 14 2.1.5.1.3. Gürültü Sınırları……………………………………………………. 14 2.1.5.1.4. Güç Harcaması ………………………………………...................... 14 2.1.5.1.5. Fan Out ………………………………………………….................. 17 2.1.5.1.6. Anahtarlama Hızı …………………………………………………. 18
ii
2.1.6. LATCH ………………………………………....................................... 19
2.1.6.1. İki Kararlı Elemanların Elektriksel Davranışları ...………………….. 19
2.1.6.2. S – R LATCH ……………………………………………………….. 25
2.1.7. STATİK LATCH DEVRESİNİN ………………………….................. 30
2.1.7.1. Makromodelin Yapısı …………………………………….................. 30
2.1.7.2. S/R Latch Similasyonu ……………………………………………… 42
2.2. YÖNTEM………………………………………………………………...
2.2.1. BULANIK MANTIK ………………………………………………….. 46
2.2.2. KLASİK VE BULANIK KÜMELER ………………………………… 47
2.2.3. Üyelik Fonksiyonları …………………………...................................... 48
2.2.4. Üyelik Fonksiyonlarının Kısımları …………………………................. 49
2.2.5. BULANIK DENETİM SİSTEMİ ……………....................................... 51
2.2.5.1. Bulanıklaştırma ……………………………………………………… 52
2.2.5.2. BULANIK ÇIKARIM (BULANIK KURALLAR)…………............. 52
2.2.5.3. DURULAŞTIRMA ………………………………………….............. 52
3. ARAŞTIRMA VE BULGULAR………………………………………….. 55
3.1. Yük ve Kaynak Gerilimine Bağlı Olarak Yayılım Gecikmesinin
Bulunması ……………………………….........................................................
55 3.2. Giriş ve Çıkış Değerlerine Bağlı Olarak Transistor Boyutunun
Bulunması …………………………………………………………………….
60 4. SONUÇ VE DEĞERLENDİRME…………………………………………. 81
4.1. Değerlerin Fuzzy Logicte İşlenmesi …………………………….............. 81
KAYNAKLAR …………………………………………................................. 87
EK-1…………………………………………………………………………... 88
ÖZGEÇMİŞ …………………………………………….................................. 90
iii
ÖZET
BULANIK MANTIL İLE LATCH OPTİMİZASYONU
Bu çalışmada veri saklama elemanları olan latchler ve genel parametreleri
araştırılmıştır. Latch devrelerinin temel yapılarından olan SR Latch devresi
üzerinde latchlerin çalışması incelenmiş ve PSPICE yazılımında simülasyonları
yapılmıştır.
Temel bir Latch devresinin girişine ve çıkışına birer tane invertör bağlanarak,
invertörlerin boyutlarının değişmesi durumunda latch’de kullanılan invertörlerin
boyutlarının değişimi ve çıkışta meydana gelen zaman gecikmeleri incelenmiştir.
Çalışma sonucunda, latchlerin boyutlarının belirlenebilmesi için Fuzzy Logic ile
modeller oluşturulmuştur. Oluşturulan modeller sayesinde PSPICE’ da similasyon
yapmaya gerek kalmadan, Latch’ de kullanılması gereken ideal invertörlerin
boyutları belirlenmeye çalışılmıştır.
Ayrıca devre tasarımı yapılırken dikkat edilmesi gereken bazı parametreler bu
çalışmada incelenmiştir. İncelenen parametreler set-up hold time, clock skew, W/L
ve güç harcamasıdır.
Anahtar Kelimeler : Latch, Flip-flop, W/L değerleri

iv
ABSTRACT
LATCH OPTIMIZATION WITH FUZZY LOGIC
The latches as a data storage element and their common parameters were researched
in this study. Performance of the latches was examined over the SR Latch circuit
which is one of the fundamental components of Latch circuits. Additionally, the
results were simulated by using PSPICE software.
The time detentions at the exit and the dimensional changes of the latch inverters
caused by the change of the inverters dimensions were searched by attaching dual
inverter at the beginning and the end of a basic Latch circuit.
At the end of the study, sample models were formed for the determination of the
dimensions of the latches by using fuzzy logic approach. Finally, these models were
used to determine the dimensions of the ideal inverters without doing simulations by
using PSPICE software. Moreover some parameters such as; set-up hold time, clock
skew, W/L and power expenses that should be considered while designing a circuit
were examined in this study.
Keywords: Latch, Flip-flop, W/L values

v
ÖNSÖZ VE TEŞEKKÜR Çalışmam sırasında OrCad PSPICE ve MATLAB Fuzzy Logic programları
kullanılmıştır. Bu programlar hemen her bilgisayarda çalışabildiklerinden
çalışmaların yapılabilmesi için donanımsal açıdan bir sorun yaşanmamıştır. Ancak
yapmış olduğum çalışmanın devre şekillerinin temini ve konu anlatımlarının
Türkiye’deki üniversitelerin kütüphanelerinde bulunamaması nedeniyle bazı sorunlar
yaşanmıştır.
TEŞEKKÜR
Yrd.Doç.Dr. Ali MANZAK ( Tez Danışmanı ), çalışmanın sonuca ulaştırılmasında
ve karşılaşılan güçlüklerin aşılmasında yön gösterici olmuştur.
Öğr.Gör. Mehmet ALBAYRAK, tezin baskıya hazırlanmasında ve çevirilerde
katkıları olmuştur.
vi
ŞEKİLLER DİZİNİ
Şekil 2.24. a) Yükselme Zamanı b) Düşme Zamanı …………………………………………
35
Şekil 2.25. Yükselme ve Düşme Zamanlarındaki Kapasite ve İletkenlik Faktörleri……………………………………………………….
36
Şekil 2.26. Mosfetin Drain Akımının Denklemleri………………………... 39 Şekil 2.27. S-R Latch Devre Şekli ………………………………………… 42 Şekil 2.28. S-R Latch Devresinin Giriş ve Çıkış Sinyalleri ………………. 43 Şekil 2.29. Kapasitif Yüke Bağlı Olarak Yayılım Gecikmesinin Değişimi.. 44 Şekil 2.30. Kapasitif Yüke Bağlı Olarak Düşme Zamanı Gecikmesinin
Değişimi ……………………………………………………….
44 Şekil 2.31. Kapasitif Yüke Bağlı Olarak Yükselme Zamanı Gecikmesinin
Değişimi ……………………………………………………….
45 Şekil 2.32. Kaynak Gerilimine Bağlı Olarak Yayılım Gecikmesinin
Değişimi ……………………………………………………….
45 Şekil 2.33. Bulanık Küme …………………………………………………. 48 Şekil 2.34. Üyelik Fonksiyonu ……………………………………………. 49 Şekil 2.35. Üyelik Derecelerinin Gösterimi ……………………………….. 50 Şekil 2.36. Bulanık Kümeler
(a) Dış Bükey (b) Dış Bükey Olmayan ……………………………………
51
SayfaŞekil 2.1. FF Kontrol Girişleri İçin Kurma-Tutma Zamanları ………….. 6 Şekil 2.2. Lojik Entegrelerde Meydana Gelen Yayılım Gecikmesi …….. 7 Şekil 2.3. Ardışıl Kaydediciler…….. ........................................................ 8 Şekil 2.4. Kaydedicilere Ulaşan Clock Sinyallerinin Şekli……………… 8 Şekil 2.5. Ring Osilatörü Kullanılarak Yapılmış Basit bir Clock Üreteci.. 9 Şekil 2.6. Kristal Osilatör Devresi ………………………………………. 9 Şekil 2.7. H Ağaç Yapısı ………………………………………………... 10 Şekil 2.8 Dijital Entegrelerde Gürültü Emniyet Payının Tespiti ……….. 12 Şekil 2.9. Dinamik Güç Harcaması Analizi İçin CMOS İnverter .……… 15 Şekil 2.10. CMOS invertörün anahtarlaması süresince, giriş ve çıkış
gerilim dalga şekilleri ile kondansatör akımının dalga şeklileri
16 Şekil 2.11. CMOS bağlı yüklerin kapasite etkisi oluşturması ……………. 17 Şekil 2.12. a) İki Kararlı Devrelerin Basit Blok diyagramı
b) Gerilim Transfer Eğrisi ……….....................................
20 Şekil 2.13. Statik Latch Devre Şekli ……………………………………... 20 Şekil 2.14. Gerilim Değişim Eğrisi ………………..................................... 21 Şekil 2.15. Kaskad Bağlı İki İnverter …………………………………….. 21 Sekil 2.16. İki kararlı Devrelerin Davranışını Temsil Eden Faz Aralığı …. 24 Şekil 2.17. Kurma Süresince İki İnvertörden Oluşan Döngüdeki Geçici
Durum Sinyalinin Yayılım Gecikmesi ………………………..
24 Şekil 2.18. S-R Latch Devre Şekli ………………………………………... 26 Şekil 2.19. Giriş ve Çıkış Dalga Şekilleri ………………………………… 28 Şekil 2.20. NAND-Tipi CMOS Statik Latch Devre Şekli ………………... 31 Şekil 2.21. NAND-Tipi CMOS Statik Latch Devresinin Karakteristik
Dalga Şekli ……………………………………………………
32 Şekil 2.22. Devrede kullanılan MOSFET'lerin İşlem Bölgeleri …………. 33 Şekil 2.23. MOSFET’in Büyük İşaret Eşdeğer Devresi ………………….. 34

vii
SayfaŞekil 2.37. Bulanık Denetleyicinin Genel Yapısı ......................................... 52 Şekil 2.38. Sinirsel Bulanık Kontrol Sisteminin İşlem Adımları …………. 54 Şekil 3.1. Fuzzy Logic Fis Editörü ………………………………………. 55 Şekil 3.2. Kapasitif Yüke Ait Üyelik Fonksiyonu ……………………….. 56 Şekil 3.3. Kaynak Gerilimine Ait Üyelik Fonksiyonu …………………… 56 Şekil 3.4. Yayılım Gecikmesine Ait Üyelik Fonksiyonu ………………... 57 Şekil 3.5. Kurallar ………………………………....................................... 57 Şekil 3.6. Giriş Değişkenlerine Göre Çıkış Değerinin Değişimi ………… 58 Şekil 3.7. Giriş Değişkenlerine Bağlı Olarak Çıkışın Üç Boyutlu
Değişimi…………………………………………………………
58 Şekil 3.8. Latch ve Sürme Devresinin Blok Diyagramı ………………….. 60 Şekil 3.9. Latch ve Sürme Devresinin Açık Şekli ....................................... 60 Şekil 3.10. Giriş, Çıkış ve Clock Sinyalleri ………………………………... 62 Şekil 4.1. Fuzzy Logic Fis Editörü ……………………………………….. 81 Şekil 4.2. Yük İnvertörünün Üyelik Fonksiyonu …………………………. 82 Şekil 4.3. Kurallar ………………………………........................................ 83 Şekil 4.4. Giriş Değişkenlerine Göre Çıkış Değerinin Değişimi …………. 84 Şekil 4.5. Giriş Değişkenlerine Bağlı Olarak Gecikmenin Üç Boyutlu
Değişimi ………………………………………………………..
85 Şekil 4.6 Girişe Bağlı Olarak 1.İnvertör Boyutunun Üç Boyutlu Değişimi 85 Şekil 4.7. Girişe Bağlı Olarak 2.İnvertör Boyutunun Üç Boyutlu Değişimi 86
viii
ÇİZELGELER DİZİNİ
Sayfa Çizelge 2.1. S-R Latch Devresinin Doğruluk Tablosu…………………... 26 Çizelge 2.2. PMOS Transistorların İşlem Modları ……………………… 27 Çizelge 2.3 Farklı İşlem Bölgelerindeki Gate Kapasitesi ………………. 34 Çizelge 2.4. Yüke Bağlı Olarak 1. İnvertörün Boyutları ………………... 72 Çizelge 2.5. Yük ve 1. İnvertöre bağlı olarak 2. İnvertörün Boyutları …. 73 Çizelge 2.6. Yük İnvertörünün Değişimine Bağlı Olarak 1. ve 2. İnvertör
Boyutları ve Gecikme Zamanının Değişimi ……………….
79 Çizelge 2.7. Giriş İnvertörünün Değişimine Bağlı Olarak 1. ve 2.
İnvertör Boyutları ve Gecikme Zamanının Değişimi ………
79
1
1. GİRİŞ 1.1. GENEL Elektronikte veri saklama elemanı olarak birçok yapı kullanılmaktadır. Veri saklama
elemanlarından bazıları latch, flip-flop, Sram, Ddram dir. Çağdaş sayısal elektronikte
temel hafıza elemanı olarak flip-flop denilen elemanlar kullanılmaktadır ( Ekiz, H.,
2003 ). İkili bilgilerin flip-floplara farklı şekilde uygulanması sonucu, flip-flop
çeşitleri oluşmaktadır. Flip-floplar giriş sinyaline veya zamanlayıcı ( clock ) olarak
kullanılan sinyalin durumuna göre tepki gösterirler. Zamanlayıcı olarak kullanılan
sinyale senkronlayıcı darbe denilmektedir. Senkronlayıcı darbenin hangi durumuna
tepki gösterdiğine bağlı olarak flip-floplar iki gruba ayrılırlar. Darbenin yalnız kararlı
durumuna tepki gösteren flip-floplara LATCH ( Kilit ) denir.
Latchler genellikle dijital devrelerde sinyal depolama ve sinyal geciktirme elemanı
olarak kullanılmaktadırlar ( Dejhan, K., vd., 2000 ). Letchler temel olarak birbirine
kaskad bağlı iki adet invertörden ( çevirici ) oluşmaktadır.
Statik ardışıl devrelerin temel yapısını S/R latchler oluşturmaktadır. S/R latchler
genellikle kaskad bağlı iki adet NOR Gates ya da NAND Gates den oluşmaktadır. Bu
her iki tip S/R latchde de pozitif geri besleme kullanılmaktadır ( Wu, C.Y., 1988 ).
Kullanılan bu pozitif geri beslemeden ötürü latchler PSPICE similasyonlarında fazla
işlem zamanı gerektirmektedirler.
Latchler diğer hafıza elemanları ile karşılaştırıldıklarında; daha fazla güç harcadıkları
ve daha fazla yer kapladıkları görülmektedir. Ayrıca latchlerde yarı kararlı ( meta-
stable ) durumlar oluşmaktadır. Yani giriş sinyallerinin durumuna göre, çıkış sinyali
kararsız bir durum göstermektedir ( Dejhan, K., vd., 2000 ).
Dijital devrelerde clock sinyalinin yükselme ve düşme zamanı minimum olmalı ve
gecikmesi sıfır olmalıdır. Gerçek uygulamalarda ise gecikme sıfır olmamaktadır. Bir
dijital devrede clock sinyalinin devre elemanı olan chiplere ulaşmasındaki zaman
farklılığına clock skew denilmektedir ( Nedovic, N., vd., 2003 )

2
1.2. ÇALIŞMANIN AMACI VE KAPSAMI
Dijital uygulamalarda latchler için birçok modelleme yapılmıştır. Bunlardan bir
kısmı; en küçük boyutta, en az güç harcamasını sağlamak ve hızı en yüksek seviyeye
çıkarmaktır. Bir kısmının amacıda; clcok skew ve yarı kararlı durumları ortadan
kaldırmaktır. Clock sinyalindeki gecikmeyi azaltmak için; ring osilatörler, kristal
osilatörler, H ağaç yapısı gibi yöntemler geliştirilmiştir ( Yoshizava, H., 1998 ).
En küçük transistor boyutu ile en az güç harcamasını ve en hızlı latchi tasarlamak
için de, latchlerin çıkışına kondansatör bağlayarak yük oluşturulmuş ve zaman
gecikmeleri ile güç harcamaları ölçülmüştür. Bu similasyonlardan alınan değerlere
göre en ideal durumu bulabilmek için algoritmalar oluşturulmuştur.
Bu çalışmada latchin çıkışına kondansatöre göre daha gerçekçi olan MOSFET’
lerden oluşan invertör bağlanmıştır. Bağlanan bu invertördeki MOSFET’ lerin
boyutları değiştirilerek çıkış kapasitesi arttırılıp azaltılmıştır. Çıkış kapasitesinin
değişimine göre zaman gecikmeleri ölçülmüştür. Bulunan zaman gecikmelerini en
aza indirebilmek için latch’in girişinde kullanılan invertörün ve latch’ de kullanılan
invertörlerin boyutları değiştirilerek yüzlerce similasyon yapılmıştır.
Sonuç olarak bu çalışmada; similasyonlardan elde edilen en ideal zaman gecikmesine
ait transistör boyutlarını, yüzlerce similasyon yapmadan bulduran bir algoritma
yazılması amaçlanmıştır. Bu doğrultuda MATLAB Programının FUZZY
TOOLBOX’ ında ( Bulanık Mantık ) giriş ve yük invertörlerinin boyutlarına göre en
ideal latch boyutunu ve zaman gecikmesini bulduran bir program oluşturulmuştur.
3
2. MATERYAL VE YÖNTEM
2.1. MATERYAL
2.1.1. VERİ SAKLAMA ELEMANLARI
2.1.1.1. Flip-Fflop
Çağdaş sayısal elektronikte temel hafızalı devre elemanı olarak FLİP – FLOP denilen
elemanlar kullanılmaktadır. Flip-flop ların değişik şekilleri vardır. Bu çeşitlerin tümü
aşağıdaki ortak özelliklere sahiptir (Ekiz, H., 2003 ).
• Bir flip-flopun iki çıkışı vardır. Q ve Q’
• Kararlı bir flip-flop da Q’ çıkışının lojik durumu Q çıkışının lojik durumunun
tam tersidir. Kararlı bir flip-flopta QQ’=00 ve QQ’=11 durumları olmaz. Bu
durumlar yalnız flip-flopun bir kararlı durumdan diğer kararlı duruma geçişi
sırasında ve hissedilmez kadar kısa sürede meydana çıkar ve kayıp olurlar.
• Q=1 ve Q’=0 durumu flip-flopun lojik 1 durumu olarak, Q=0 ve Q’=1
durumu ise flip flopun lojik 0 durumu olarak kabul edilmiştir.
• Flip flopa giriş sinyali uygulanmadığı sürece flip flop mevcut durumunu
korumaya devam eder. Yani bir bit hafıza elemanı görevini sürdürür.
• Değişik çeşit flip floplar görevine göre değil, yalnız giriş sinyallerinin
sayısına ve bu sinyallere verilecek olan tepkilere göre farklılaşırlar.
İkili bilgilerin flip-flopa farklı şekilde uygulanması sonucu, flip-flop çeşitleri oluşur.
Diğer bir değişle; temel flip-flop devresinin bağlantısının değiştirilmesi ve yeni
özellikler eklenmesi ile oluşturulan değişik flip flop çeşitleri bulunmaktadır.
Bunlardan en çok kullanılanlar:
1. R – S (Reset-Set) tipi FF
2. Tetiklemeli (clocked) R-S FF
3. J – K tipi FF
4
4. Ana – Uydu (Master – Slave) tipi FF
5. D (Data) tipi FF
Ayrıca flip-floplar Asenkron veya Senkron olarak ikiye de ayrılır. Asenkron giriş
sinyallerinin hiçbir şarta bağlı olamadan istenilen anda uygulanabileceği ve
uygulandığı anda etkili olabileceği anlamını taşır. Asenkron flip-floplardan farklı
olarak senkron flip-floplar esas giriş sinyallerine ( R, S, D , J, K ) bu sinyallerin
durum değiştirdiği anlarda değil Senkronlayıcı ( zamanlayıcı ) olarak kullanılan CLK
veya diğer bir sinyalin sabitliği veya ani olarak durum değiştirmesi sırasında tepki
gösterirler.
Senkronlayıcı darbenin hangi elemanına ( seviyesi, yükselişi, düşüşü ) tepki
gösterdiğine bağlı olarak flip-floplar iki sınıfa ayrılır. Darbenin yalnız kararlı
durumuna tepki veren flip-floplara KİLİT ( LATCH ) denir. Darbenin ani olarak
yükselişine veya düşüşüne tepki veren flip-floplara ise TETİKLENEN (
TRIGGERLER ) denir (Ekiz, H., 2003 ).
2.1.1.2. Latch İle Flıp-Flop Arasındaki Farklar
• Latch flip-floplar iki şekilde dizayn edilebilirler. Bunlardan birincisinde clock
sinyali kullanılmaz. Giriş sinyallerinin ( R, S, J, K, D ) durum değişikliğine
göre tepki verirler. İkinci yapıda clock sinyali kullanılır. Fakat bu yapıdaki
latch flip-floplar; esas giriş sinyallerine bu sinyallerin durum değiştirdiği
anlarda değil senkronlayıcı olarak kullanılan clock veya diğer bir sinyalin
varlığı ve sabitliği sırasında tepki gösterirler.bunu sağlamak için esas sinyal
kaynakları asenkron R-S flip-flopun girişlerine direkt olarak değil, bir girişi
senkronlayıcı sinyal kaynağına ( C ) bağlanmış olan VE kapıları veya
VEDEĞİL kapıları üzerinden bağlanır.
• Latch tipi devrelerde girişler etkin olduğu sürece o elemanın içeriği
değiştirilebilir.
• Flip-flop larda clock sinyalinin yükselişi veya düşüşüne göre çıkış değeri
değişir. Clock sinyalinin kararlı durumlarında ( clock sinyalinin sabit bir
seviyede olduğunda ) flip-flop un çıkışı değişmez.

5
Register ( Kaydedici ) tasarımında dikkat edilmesi gereken bazı hususlar vardır.
Bunlar yerine getirilmezse register çalışmaz veya verimsiz çalışır. Bunları sırasıyla
inceleyelim.
2.1.2. CLOCK İŞARETİ
Sayısal sistemlerdeki elemanların eş zamanlı çalışmasını sağlayan dikdörtgen dalga
şeklinde bir işarettir. Clock işareti ile denetlenen elemanlar sadece clock işareti etkin
olunca işlem yaparlar. Onun dışında eski konumlarını korurlar. Clock işaretinin
kullanılması açısından elemanlar ikiye ayrılırlar.
2.3.1. Düzey Tetiklemeli Elemanlar : Clock işaretinin bir düzeyini ( pozitif lojikte
‘1’ düzeyini ) etkin düzey olarak kabul ederler. Bu elemanlar clock işareti ‘1’
düzeyindeyken işlem yaparak durumlarını ve çıkışlarını değiştirirler.
Clock işaretinin ‘1’ düzeyindeyken girişler işleme sokulduğundan, bu süre boyunca
giriş değerleri sabit tutulmalıdır. Aksi durumda ardışıl elemanın çıkışının alacağı
değer belirsiz olur. Bu süreye kayıt süresi denir clock işaretinin ‘0’ olduğu sürede
ise girişler değiştirilebilir. Bu süreye yerleşme süresi denir.
2.3.2. Kenar Tetiklemeli Elemanlar : clock işaretinin bir kenarını ( pozitif lojikte
çıkan kenar ) etkin kenar olarak kabul ederler. Bu elemanlar clock işareti 0-1 geçişi
yapınca ( çıkan kenar ) işlem yaparak durumlarını ve çıkışlarını değiştirirler. Clock
işareti geçiş yapmazsa eski durumlarını korurlar. Negatif lojikte ise işlemler 1-0
geçişinde ( inen kenar ) yapılır. Clock işaretinin 0-1 geçişi yaparken girişler işleme
sokulduğundan, bu kenardan belli bir süre önce ve sonra giriş değerleri sabit
tutulmalıdır. Aksi durumda ardışıl elemanın çıkışının alacağı değer belirsiz olur.
6
2.1.3. FLIP-FLOP VE LATCH PARAMETRELERİ
2.1.3.1. KURMA VE TUTMA ZAMANLARI ( Set-up, Hold Time )
2.1.3.1.1. Kurma Zamanı (set-up time, ts) : Flip-floplar girişlerdeki tetikleme
sinyalinin durumuna göre çıkış değerini değiştirirler. Flip-flop girişlerindeki
tetikleme sinyalinin flip-flop çıkışını (Q,Q’) değiştirmesi için geçen zamana kurma
zamanı denir. Devreler dizayn edilirken izin verilebilen minimum kurma zamanı
belirlenmelidir. Eğer bu zaman gereksinimi sağlanmazsa, devre tetikleme sinyalinin
durum değişikliklerine güvenli tepki vermeye bilir.
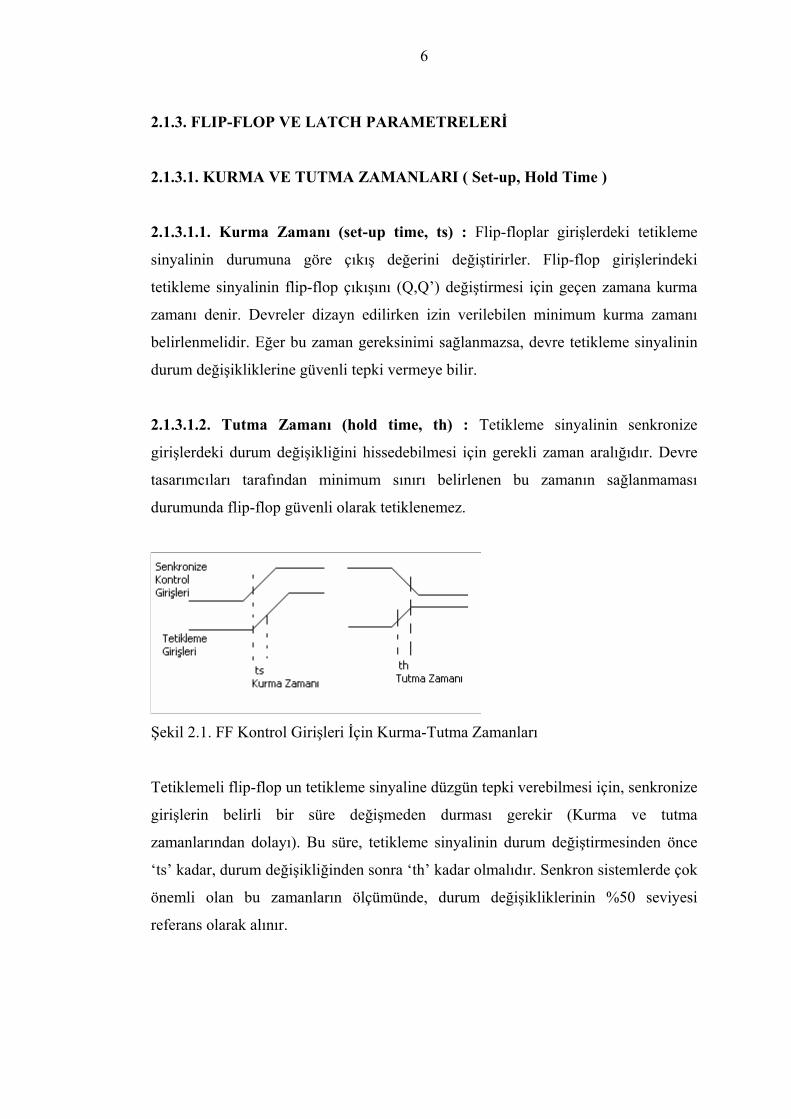
2.1.3.1.2. Tutma Zamanı (hold time, th) : Tetikleme sinyalinin senkronize
girişlerdeki durum değişikliğini hissedebilmesi için gerekli zaman aralığıdır. Devre
tasarımcıları tarafından minimum sınırı belirlenen bu zamanın sağlanmaması
durumunda flip-flop güvenli olarak tetiklenemez.
Şekil 2.1. FF Kontrol Girişleri İçin Kurma-Tutma Zamanları
Tetiklemeli flip-flop un tetikleme sinyaline düzgün tepki verebilmesi için, senkronize
girişlerin belirli bir süre değişmeden durması gerekir (Kurma ve tutma
zamanlarından dolayı). Bu süre, tetikleme sinyalinin durum değiştirmesinden önce
‘ts’ kadar, durum değişikliğinden sonra ‘th’ kadar olmalıdır. Senkron sistemlerde çok
önemli olan bu zamanların ölçümünde, durum değişikliklerinin %50 seviyesi
referans olarak alınır.

7
2.1.3.1.3. Yayılım Gecikmesi (Propagation Detay-tpd ) ve Yayılım hızı (
Propagation Speed )
Dijital devrenin veya lojik kapının girişindeki değişme ile buna bağlı olarak çıkışta
meydana gelecek değişme arasındaki zaman farkına ‘yayılma gecikmesi’ adı verilir
ve nanosaniye (nsn) cinsinden ifade edilir. Yayılım hızı ise yapılan işlemin hızını
belirtir ve MHz cinsinden ifade edilir.
Şekil 2.2. Lojik entegrelerde meydana gelen yayılım gecikmesi
tpHL → 1’ den 0’a geçerken harcanan zaman,
tpLH → 0’dan 1’e geçerken harcanan zaman,
tpd → iki değerin (tphl ve tplh ) ortalaması.
Genelde tpHL ve tpLH değerleri yükleme durumlarına baglı olarak değişebilir ve
aynı değerlerinde olmayabilir. Aynı değerde olmaması durumunda , iki değerin
aritmetik ortalaması alınır.
2.1.3.1.4. CLOCK SKEW
İdeal clock sinyalinin yükselme ve düşme zamanları minimum olmalıdır ve
gecikmesi sıfır olmalıdır. Gerçek uygulamalarda clock sinyalinin gecikmesi sıfır
değildir.
Bir sayısal devrede clock sinyalinin devre elemanları olan çiplere ulaşmasındaki
zaman farklılığına clock skew denir. Bir başka değişle devrede tek bir clock sinyali
olmasına rağmen her bir devre elemanının clock sinyali diğerine göre faz farklıdır.
Aşağıdaki şekilde ardışıl kaydediciler görülmektedir. Şekil 2.3 deki bütün
kaydedicilere aynı clock sinyali uygulanmıştır ama her bir kaydediciye ulaşan clock
sinyali birbirinden farklıdır (Nedovic, N., 2003)

8
Şekil 2.3 Ardışıl kaydediciler.
Şekil 2.3 deki devrenin clock sinyalleri aşağıdaki şekil 2.4 de gösterildiği gibi olur.
Şekil 2.4 Kaydedicilere ulaşan clock sinyallerinin şekli
Flip-flop girişlerinin set-up ( kurma süresi ) ve hold time ( tutma süresi ) değerlerini
karşılaması sağlanmalıdır ve bu önemli bir dizayn problemidir. Yayılım
Gecikmesinin ( Propagation Delay ) önemli olduğu hesaplamalarda clock skew ihmal
edilemez.
Bilgisayar sistemlerinde clock skew için makine saykılının %10’ una kadar izin
verilir. VLSI chip dizaynında da bu değeri sağlamak önemli bir problemdir.
Chiplerde clock sinyali üreteci olarak ring osilatör kullanmak en basit tekniktir.
Böyle bir osilatör devresi şekil 2.5 de görülmektedir.
9
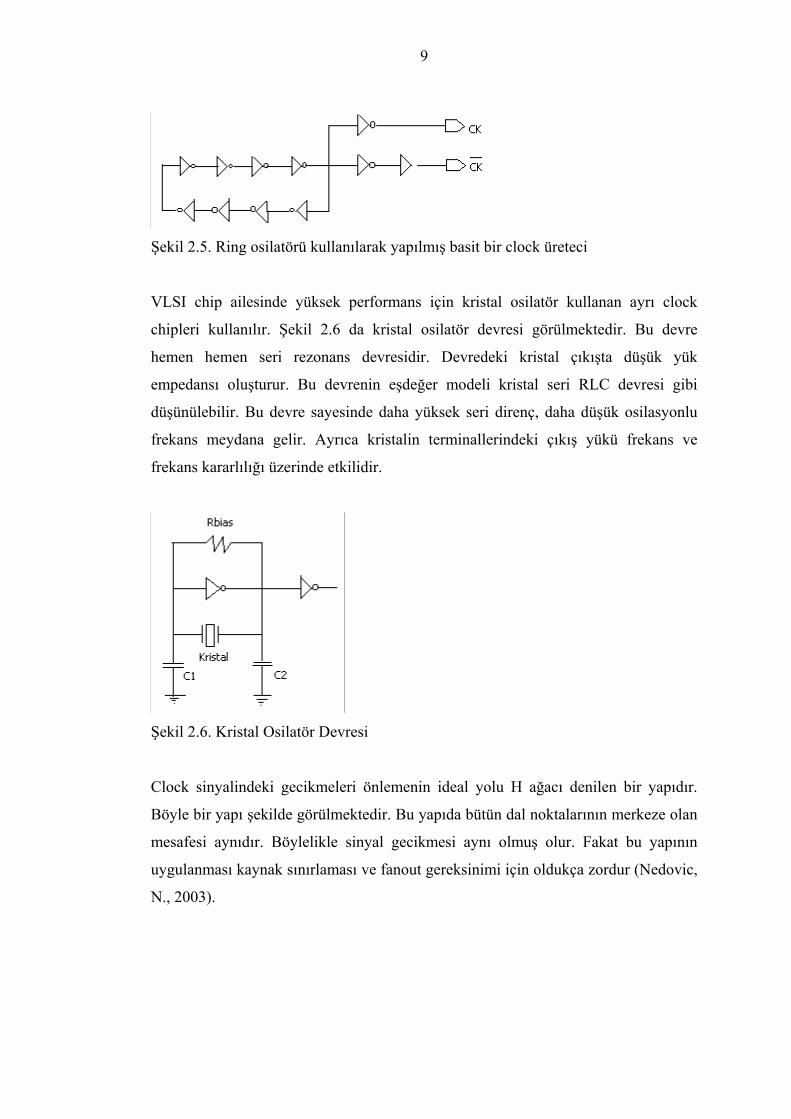
Şekil 2.5. Ring osilatörü kullanılarak yapılmış basit bir clock üreteci
VLSI chip ailesinde yüksek performans için kristal osilatör kullanan ayrı clock
chipleri kullanılır. Şekil 2.6 da kristal osilatör devresi görülmektedir. Bu devre
hemen hemen seri rezonans devresidir. Devredeki kristal çıkışta düşük yük
empedansı oluşturur. Bu devrenin eşdeğer modeli kristal seri RLC devresi gibi
düşünülebilir. Bu devre sayesinde daha yüksek seri direnç, daha düşük osilasyonlu
frekans meydana gelir. Ayrıca kristalin terminallerindeki çıkış yükü frekans ve
frekans kararlılığı üzerinde etkilidir.
Şekil 2.6. Kristal Osilatör Devresi
Clock sinyalindeki gecikmeleri önlemenin ideal yolu H ağacı denilen bir yapıdır.
Böyle bir yapı şekilde görülmektedir. Bu yapıda bütün dal noktalarının merkeze olan
mesafesi aynıdır. Böylelikle sinyal gecikmesi aynı olmuş olur. Fakat bu yapının
uygulanması kaynak sınırlaması ve fanout gereksinimi için oldukça zordur (Nedovic,
N., 2003).

10
Şekil 2.7. H Ağaç Yapısı

11
2.1.4. SAYISAL ENTEGRE TERMİNOLOJİSİ
2.1.4.1. Güç Harcaması ( Power Dissipation )
‘Güç Harcaması’; bir lojik kapının harcadığı güç miktarıdır ve mW cinsinden ifade
edilir.Entegrede harcanan güç genelde tek bir kaynaktan elde edilir . Entegrenin güç
kaynağına bağlanacak ucu bipolar entegrelerde ‘Vcc’, CMOS entegrelerde ‘Vdd’
olarak isimlendirilir. Bir lojik kapının bağlı olduğu güç kaynağından çekeceği akım,
kapının çıkışının aldığı değere (0 veya 1) göre değişir. Bu değişiklik, entegre
devrenin harcadığı gücün değişmesi sonucunu doğurur. Entegre devrenin harcadığı
gücü bulmak için, çıkısın ‘0’ ve ‘1’ olduğu anlarda entegrede harcanan gücün
ortalaması alınır.
2.1.4.2. Çıkış Kapasitesi ( fan out )
Bir lojik kapının çıkışına bağlanabilecek maksimum yük sayısına ‘çıkış kapasitesi –
fan out ’denir.’fan out’ değeri entegre çeşidine göre farklılık gösterir. Karmaşık
devrelerde ,kullanılan entegrenin çıkışına kaç tane kapı devresinin
bağlanabileceğinin bilinmesi gerekir.Çıkış ucuna fazla sayıda yük bağlanırsa entegre
bozulur.
Ardı ardına bağlanacak entegrelerin aynı cins olması uygulamada kolaylık sağlar.
‘Fan Out’ değeri ,kullanılan entegrelerin giriş ve çıkış akımlarına göre hesaplanır.
2.1.4.3. Gürültü Bağışıklığı ( Noise Immunity-Noise Magrin )
Gürültü bağışıklığı ,devrenin çalışmasına etki etmeyecek şekilde izin verilebilen
gürültü sınırıdır ve mV cinsinden ifade edilir.TTL entegrelerin 1 konumuna gelmesi
için 2.4v Gereklidir derken ,bunun 0.4V’u gürültü payı olarak konmuştur. ‘o’
seviyesi için de durum aynıdır.
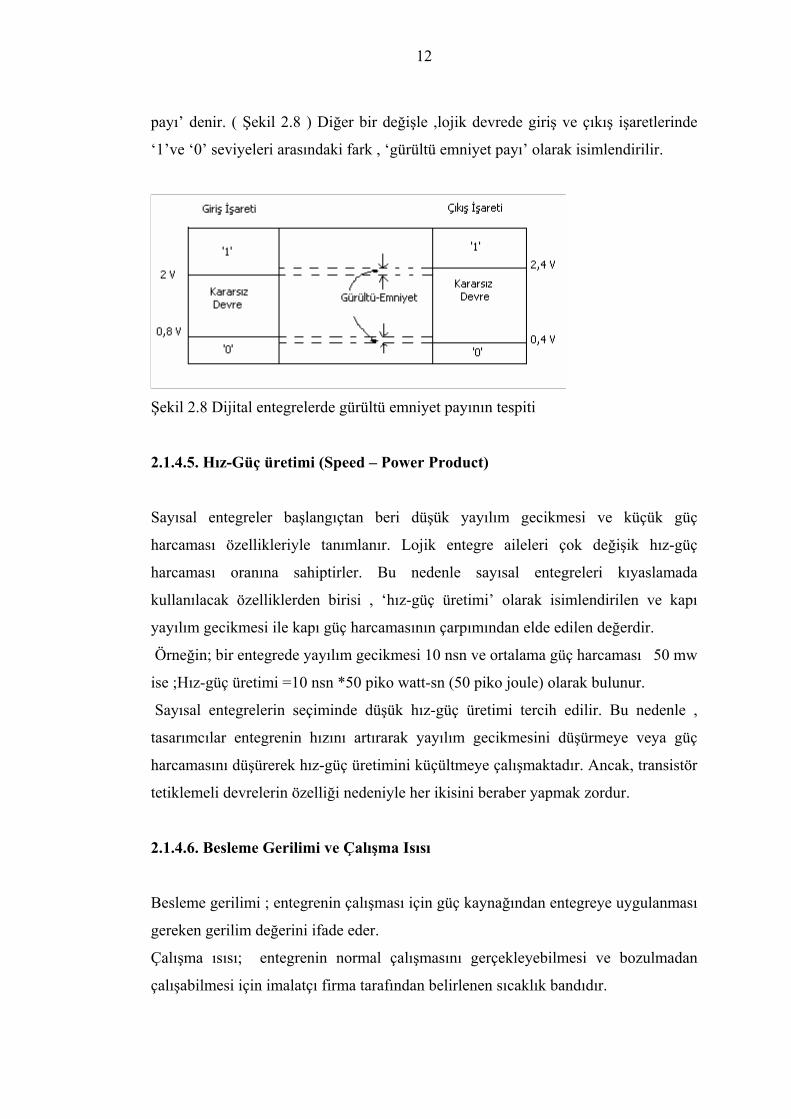
2.1.4.4. Emniyet payı: Bir sayısal devrenin girişine gelen gürültü işaretlerini, gerçek
işaretten ayırabilmek için konulan gerilim farkına sayısal devrenin ‘gürültü-emniyet
12
payı’ denir. ( Şekil 2.8 ) Diğer bir değişle ,lojik devrede giriş ve çıkış işaretlerinde
‘1’ve ‘0’ seviyeleri arasındaki fark , ‘gürültü emniyet payı’ olarak isimlendirilir.
Şekil 2.8 Dijital entegrelerde gürültü emniyet payının tespiti
2.1.4.5. Hız-Güç üretimi (Speed – Power Product)
Sayısal entegreler başlangıçtan beri düşük yayılım gecikmesi ve küçük güç
harcaması özellikleriyle tanımlanır. Lojik entegre aileleri çok değişik hız-güç
harcaması oranına sahiptirler. Bu nedenle sayısal entegreleri kıyaslamada
kullanılacak özelliklerden birisi , ‘hız-güç üretimi’ olarak isimlendirilen ve kapı
yayılım gecikmesi ile kapı güç harcamasının çarpımından elde edilen değerdir.
Örneğin; bir entegrede yayılım gecikmesi 10 nsn ve ortalama güç harcaması 50 mw
ise ;Hız-güç üretimi =10 nsn *50 piko watt-sn (50 piko joule) olarak bulunur.
Sayısal entegrelerin seçiminde düşük hız-güç üretimi tercih edilir. Bu nedenle ,
tasarımcılar entegrenin hızını artırarak yayılım gecikmesini düşürmeye veya güç
harcamasını düşürerek hız-güç üretimini küçültmeye çalışmaktadır. Ancak, transistör
tetiklemeli devrelerin özelliği nedeniyle her ikisini beraber yapmak zordur.
2.1.4.6. Besleme Gerilimi ve Çalışma Isısı
Besleme gerilimi ; entegrenin çalışması için güç kaynağından entegreye uygulanması
gereken gerilim değerini ifade eder.
Çalışma ısısı; entegrenin normal çalışmasını gerçekleyebilmesi ve bozulmadan
çalışabilmesi için imalatçı firma tarafından belirlenen sıcaklık bandıdır.

13
2.1.5. TAMAMLAYICI MOS LOJİK (CMOS) TEKNOLOJİSİ
Tamamlayıcı MOS ( CMOS ) lojik ailesinde P ve N kanal MOSFET’ler birlikte
kullanılmaktadır. CMOS ailesi, P-MOS ve N-MOS kanalın sahip olduğu üstünlükleri
aynı devrede toplar. CMOS entegreler, P ve N tipi MOS’lara göre çok daha karmaşık
bir yapıya ve daha düşük eleman yoğunluğuna sahiptirler.
CMOS entegreler PMOS ve NMOS teknolojilerine göre daha yüksek hız ve daha
düşük güç tüketimi gibi avantajlara sahiptirler. LSI alanı içerisinde pek fazla
kullanılmayan CMOS ailesi, MSI alanında TTL’nin rakibi olarak kullanılmaktadır.
TTL’ye göre daha basit üretim işlemine ve daha yüksek paketleme yoğunluğuna
sahip CMOS ailesi, bu özellikleri nedeni ile bir entegre içerisinde daha fazla sayıda
eleman oluşturmasına imkan tanır. Genelde TTL’lere göre daha yavaş olan CMOS
entegrelerin yeni serilerinde yüksek hızlı elemanlar üretilmektedir.
2.1.5.1. CMOS Entegrelerin Özellikleri
2.1.5.1.1. CMOS Entegrelerde Kullanılan Seriler : CMOS ailesindeki dijital
entegreler çeşitli serilerde üretilmektedir. İlk üretilen CMOS’lar 400A serisinde
iken, geliştirilmiş versiyonu olan CMOS’ lar daha yüksek çıkış akımı ile 400B serisi
olarak üretilmektedirler. 74C ve 54C seriri olarak üretilen CMOS serisi entegreler,
TTL entegresi ile fonksiyon ve pin olarak tam uyumludur. TTL eşdeğeri yerine
kullanılabilen 74C serisinin performansı, 4000 serisi ile aynıdır. Motorola firması
4000 serisini 14000 serisi olarak üretmektedir. Yani, 4004 ile 14004 fonksiyon ve
ayak uyumludur. Sygnetics firması, aynı seriyi HCT4001 şeklinde tanımlamaktadır.
74C serisinin geliştirilmiş şekli daha hızlı olarak imal edilen 74LS serisi TTL’lerin
karşılığı olan 74HC serisi (yüksek hızlı CMOS) entegrelerdir. Bu tipin daha
geliştirilmiş serisi ise, doğrudan TTL çıkışlar tarafından sürülebilen 74HCT serisidir.
Farklı lojik ailelere mensup entegrelerin birlikte kullanılma durumu daha sonraki
konularda izlenecektir.

14
2.1.5.1.2. Besleme Gerilimi ve Gerilim seviyeleri : 4000 ve 74C serisi entegreler;
3-15 Volt arasındaki gerilimler ile, 74HC ve 74HCT serileri ise 2-6 volt arasındaki
gerilimler ile çalışırlar. CMOS ve TTL entegreler birlikte kullanıldığı zaman,
CMOS’un Vdd ve TTL’nin Vcc gerilimlerini aynı kaynaktan sağlamak için her iki
tip eleman +5V ile çalıştırılabilir.
CMOS elemanların yalnızca CMOS elemanları sürme durumunda çıkış gerilim
seviyesi; ‘0’ konumunda yaklaşık 0 V, ‘1’ konumunda ise + Vdd değerinde olur.
CMOS entegreler Vdd = +5 V ile çalıştırıldığı zaman, VIL(MAX) = 1.5V ve VIH(MIN) =
3.5 V olarak kabul edilir.
2.1.5.1.3. Gürültü Sınırları : CMOS entegrelerin DC gürültü bağışıklıkları; Vnmh
=Vnml =%30 Vdd olarak ifade edilir.Vdd=+5 V ise, her iki lojik durumundaki
gürültü sınırı 1.5V olarak bulunur. Bu değer TTL ve ECL’den daha iyidir ve bu
durum yüksek gürültü ortamındaki uygulamalarda CMOS’u üstün duruma geçirir.
2.1.5.1.4. Güç Harcaması : CMOS lojik devreler statik durumda iken (durum
değişmediği zaman) güç harcaması çok düşüktür. Vdd = +5 V olduğu zaman her bir
kapı için 2.5 Nw’lık bir güç harcaması, Vdd=+10 V durumunda ise 10 NW’lık bir
güç harcaması oluşur.
DC çalışmada düşük seviyede kalan CMOS entegrelerin güç tüketimi, anahtarlama
durumu söz konusu olduğu durumlarda yükselir. Örneğin; DC çalışmada 10mW olan
güç tüketimi;100KHZ’de Pd= 0.1 mW değerini alır. Bunun nedeni, çıkışa bağlı yük
nedeni ile oluşan kapasitenin üzerinden akan şarj akımıdır.
CMOS İnverter lerde statik ve dinamik güç olmak üzere iki tip güç harcaması vardır.
CMOS inverterlerdeki statik güç ihmal edilebilir.
Anahtarlama süresince, çıkış yük kapasitansı sırasıyla şarj ve deşarj olurken CMOS
inverter kaçınılmaz olarak güç harcar. Basit bir CMOS inverter devresi şekilde
görülmektedir. Burada giriş geriliminin dalga şekli ideal olarak kabul edilecek ve
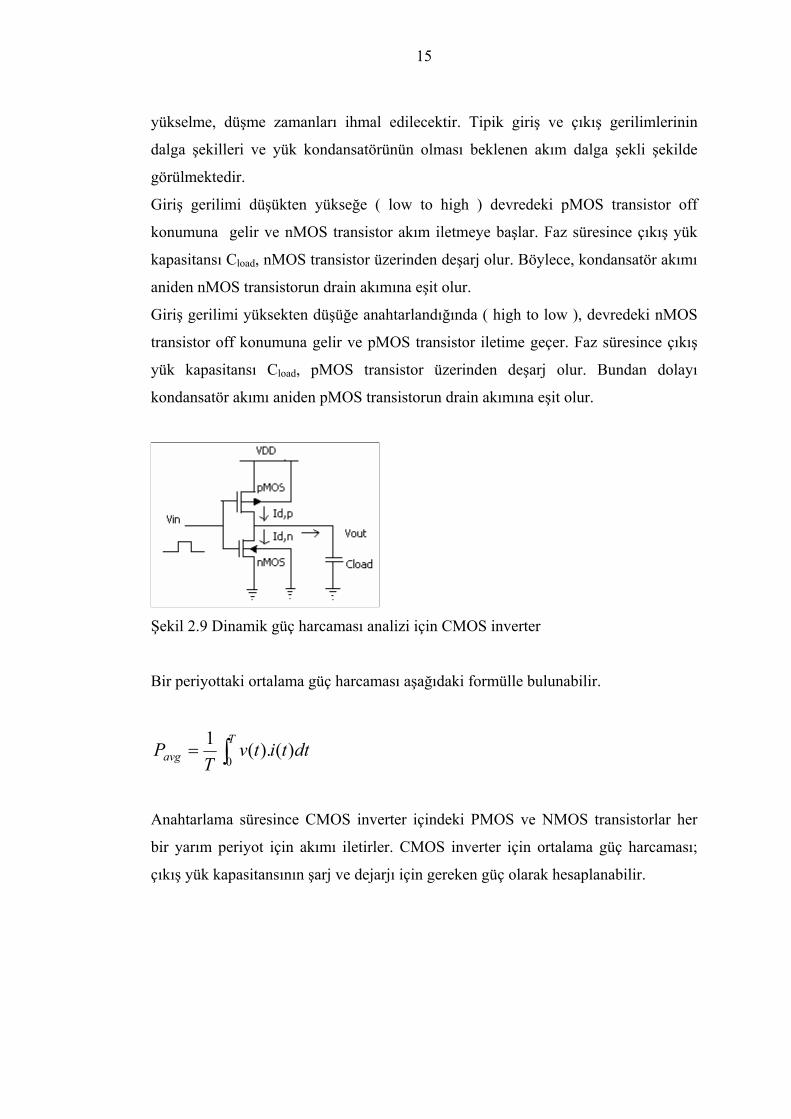
15
yükselme, düşme zamanları ihmal edilecektir. Tipik giriş ve çıkış gerilimlerinin
dalga şekilleri ve yük kondansatörünün olması beklenen akım dalga şekli şekilde
görülmektedir.
Giriş gerilimi düşükten yükseğe ( low to high ) devredeki pMOS transistor off
konumuna gelir ve nMOS transistor akım iletmeye başlar. Faz süresince çıkış yük
kapasitansı Cload, nMOS transistor üzerinden deşarj olur. Böylece, kondansatör akımı
aniden nMOS transistorun drain akımına eşit olur.
Giriş gerilimi yüksekten düşüğe anahtarlandığında ( high to low ), devredeki nMOS
transistor off konumuna gelir ve pMOS transistor iletime geçer. Faz süresince çıkış
yük kapasitansı Cload, pMOS transistor üzerinden deşarj olur. Bundan dolayı
kondansatör akımı aniden pMOS transistorun drain akımına eşit olur.
Şekil 2.9 Dinamik güç harcaması analizi için CMOS inverter
Bir periyottaki ortalama güç harcaması aşağıdaki formülle bulunabilir.
∫=T
avg dttitvT
P0
)().(1
Anahtarlama süresince CMOS inverter içindeki PMOS ve NMOS transistorlar her
bir yarım periyot için akımı iletirler. CMOS inverter için ortalama güç harcaması;
çıkış yük kapasitansının şarj ve dejarjı için gereken güç olarak hesaplanabilir.
16
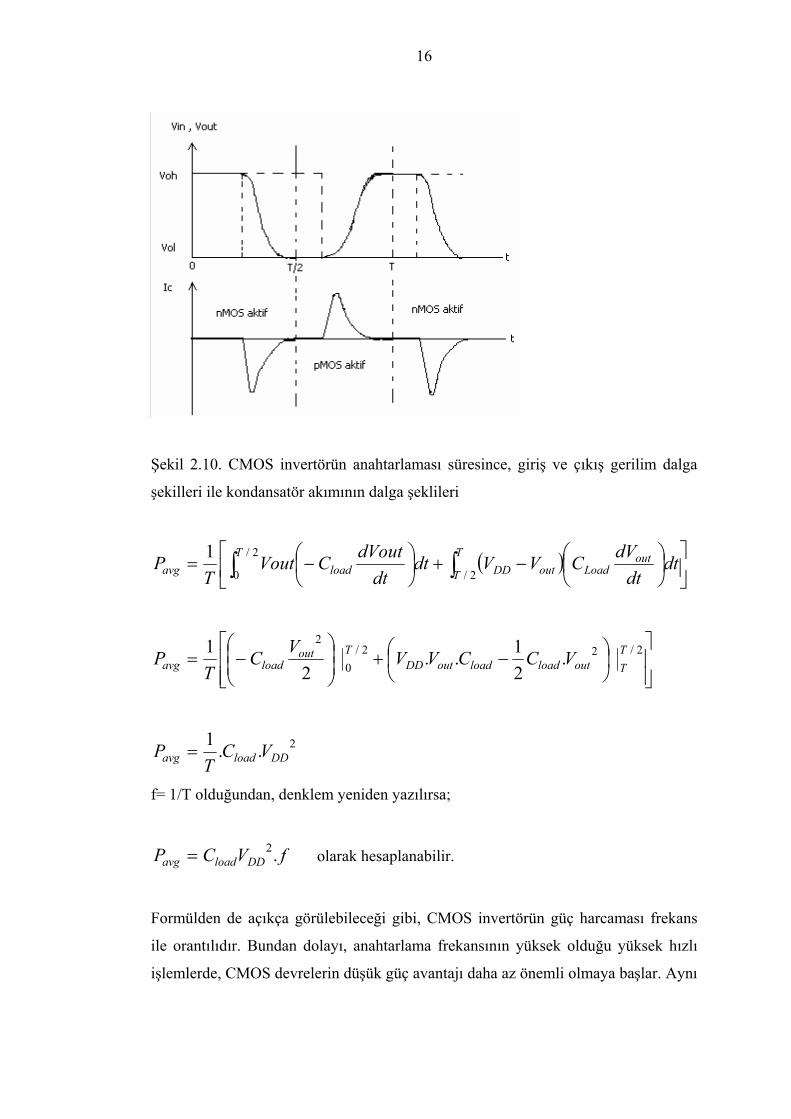
Şekil 2.10. CMOS invertörün anahtarlaması süresince, giriş ve çıkış gerilim dalga
şekilleri ile kondansatör akımının dalga şeklileri
( )
−+
−= ∫∫
T
Tout
LoadoutDDloadT
avg dtdtdVCVVdt
dtdVoutCVout
TP
2/
2/
0
1
−+
−= 2/22/
0
2
.21..
21 T
ToutloadloadoutDDTout
loadavg VCCVVVCT
P
2..1DDloadavg VC
TP =
f= 1/T olduğundan, denklem yeniden yazılırsa;
fVCP DDloadavg .2= olarak hesaplanabilir.
Formülden de açıkça görülebileceği gibi, CMOS invertörün güç harcaması frekans
ile orantılıdır. Bundan dolayı, anahtarlama frekansının yüksek olduğu yüksek hızlı
işlemlerde, CMOS devrelerin düşük güç avantajı daha az önemli olmaya başlar. Aynı

17
zamanda ortalama güç harcaması bütün transistorların karakteristiklerine ve
boyutlarına bağlıdır. Dolayısıyla, anahtarlama olayı süresince güç tüketiminin
miktarı anahtarlamanın gecikme zamanı ile ilgili değildir. Sonuç olarak, güç
tüketimi, giriş geriliminin VOL den VOH ye geçerken çıkış kondansatörünün şarj ve
deşarj durumlarında oluşur.
2.1.5.1.5. Fan Out : N-MOS ve P-MOS’larda olduğu gibi, CMOS girişleride çok
büyük bir dirence sahiptirler (1010Ω) ve sinyal kaynağından akım çekmezler.Ancak
her bir CMOS giriş 5 pF’lık yük etkisi oluşturur. ( Şekil 2.11 ).Bu giriş kapasitesi ,bir
CMOS elemanın sürebileceği giriş sayısını sınırlar.Bir CMOS elemanın çıkışı, bağlı
bulunduğu tüm girişlerdeki kapasitelerin paralel kombinasyonunu şarj deşarj etmek
zorunda olduğundan,sürülen elemanlarının sayısının artması çıkış anahtarlama
zamanını arttırır.
Şekil 2.11. CMOS bağlı yüklerin kapasite etkisi oluşturması.
CMOS elemanlarda eklenen her bir yük ile ,sürücü devrenin yayılım gecikmesi
ortalama 3 nsn artar. Yüksüz durumda tphl =30 nsn yayılım gecikmesine sahip bir
‘VEDEĞİL’ kapısının 20 yüke sahip olması durumundaki yayılım gecikmesi:
Toplam yayılım gecikmesi = tphl (yüksüz)+(yük sayısı )*3
= 30 nsn +(30nsn)=90nsn olur
Bu durumda fan_out’un maksimum yayılım gecikmesine bağlı olduğu sonucu
doğurur .Genel olarak 1mhz’in altındaki uygulamalarda ‘fan –out’ değeri 50 sayısı
ile sınırlandırılır.
18
2.1.5.1.6. Anahtarlama Hızı : Her ne kadar CMOS büyük kapasitif yükleri sürmek
zorunda olsada ,düşük çıkış direnci (P-MOSFET’in 1 durumundaki Ron direnci ≤
1kΩ dur) yük kapasitansının hızlı şarj olmasını sağlar . Bu durum anahtarlama hızını
arttırır.
4000 serisi ‘VEDEĞİL’ kapısı;
VDD = +5 V’ta ortalama tpd =50 nsn,
VDD = 10V’ ta tpd =25nsn
yayılım gecikmesine sahiptir. Vdd nin artmasıyla tpd değerinin artmasının nedeni;
yüksek besleme geriliminde MOSFET’in RON değerinin küçülmesidir. Bu durum,
yüksek hız gerektiren yerlerde VDD geriliminin mümkün olduğu kadar yüksek
tutulması gerektiğini ortaya çıkarsa da, VDD nin değerinin arttırılması(aynı devre
üzerinde VDD sabittir, buradaki artıştan kasıt VDD değeri daha yüksek bir devre
dizayn etmektir.) ile güç tüketiminin artacağı ortadadır.

19
2.1.6. LATCH
Latch ve Flip-Flop analizi yapmadan önce ARDIŞIL ( Sequential ) devrelerin
elektriksel davranışlarını bilmek gerekmektedir. Çünkü latch ve flip-flop lar bu temel
üzerine oluşturulmaktadır.
Ardışıl devreler, bileşik devrelere geri besleme bloğu eklenerek elde edilen
devrelerdir. Ardışıl devrelerde sıkça kullanılan bellek elemanları, bileşik devrelere
geri besleme yolu ( feedback ) sağlayacak şekilde bağlanırlar.
Belleklerde saklanan ikili bilgiler, sıralı devrelerin durumunu tanımlar. Harici
girişlerden ikili bilgiler alan ardışıl devre, hariçten aldığı ikili bilgi ile, bellek
elemanlarının mevcut durumlarını birleştirerek çıkışta oluşacak ikili değerleri belirler
(Kang, S., 1999)
Geri beslemeli bu devreler çift kararlı, tek kararlı ve serbest çalışan olmak üzere üç
guruba ayrılmaktadırlar. Dışarıdan bir müdahaleye gereksinim duymadan, belirli
aralıklarla durum değiştirerek sinyal üreten devrelere, serbest çalışan devreler
denilmektedir. Dışarıdan uygulanan uygun bir sinyal ile durumunu geçici bir süre
değiştirip, bir süre sonra tekrar eski konumuna dönen devrelere tek kararlı devreler
denilir. Dışarıdan bir müdahale yapılmadığı sürece bulunduğu durumu sürekli
koruyan devrelere de çift kararlı devreler denilmektedir.
Latch ve flip-floplarda kullanılan elemanlar çift kararlı olduğundan, bu tip
elemanların elektriksel davranışları incelenecektir.
2.1.6.1. İki Kararlı Elemanların Elektriksel Davranışları
İki kararlı elemanlar, birbirine çapraz bağlı iki özdeş çevirici ( inverter ) devresi
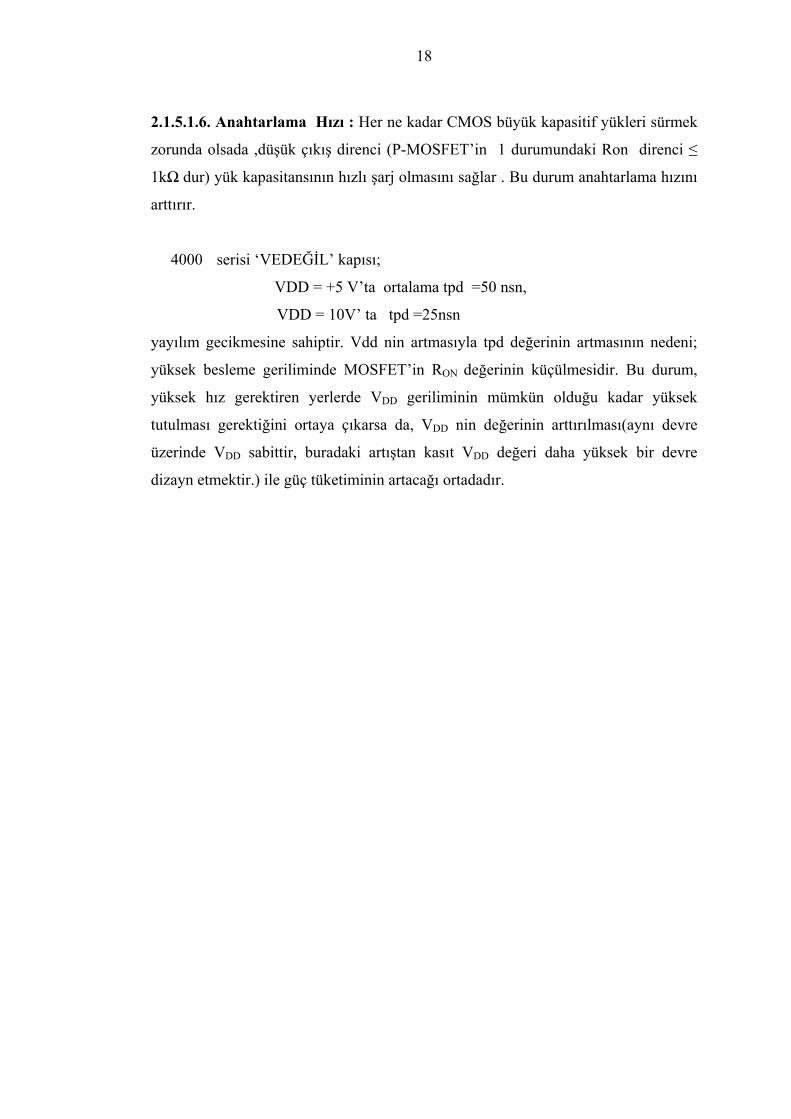
içermektedir. İki kararalı devrelerin basit blok diyagramı Şekil 2.12.a da
görülmektedir. Şekilden de anlaşılacağı gibi, 1 numaralı invertör çıkış gerilimi, 2
numaralı invertör giriş gerilimine eşittir ( V01 = V12 ). Aynı şekilde 2 numaralı
invertör çıkış gerilimi de 1 numaralı invertör giriş gerilimine eşittir ( V02 = V11 ). Her
iki invertörün de giriş çıkış davranışını inceleyebilmek için, öncelikle invertörlerin
gerilim transfer karakteristiklerinin çizilmesi gerekmektedir. Bu eğri çizilirken x
ekseninde giriş gerilimi, y ekseninde çıkış gerilimi gösterilir. Buna göre çizilen
20
gerilim transfer karakteristik eğrisi şekil 2.12.b de gösterilmiştir. Şekilde görüldüğü
gibi iki gerilim eğrisi üç noktada kesişmektedir. Bu noktalardan iki tanesi kararlı, bir
tanesi kararsız noktadır. Şayet devre bu iki kararlı durumdan birinde işleme başlarsa,
harici bir etki olmadıkça bu konumunu sürekli koruyacaktır.
(a) (b)
Şekil 2.12.a) İki Kararlı Devrelerin Basit Blok Diyagramı b) Gerilim Transfer Eğrisi
Bu anda geri besleme gerilim eğrisinin eğimi, kararlı iki işlem noktasının
bileşkesinden daha küçüktür. Yani invertörlerin kazancı küçüktür. Bunun için; karalı
durumların birinden diğerine geçerken yeterince büyük harici bir sinyal
uygulanmalıdır. Harici sinyal sayesinde invertörlerin geri besleme gerilim kazancı
kararlı noktaların bileşkesinden büyük olmaktadır. Şekil 2.12..b de gösterilen üçüncü
noktada karasız işlem noktasıdır. İşte bu gibi kararlı iki işlem noktasına sahip
devreler; çift kararlı devreler denilmektedir. (Kang, S., 1999)
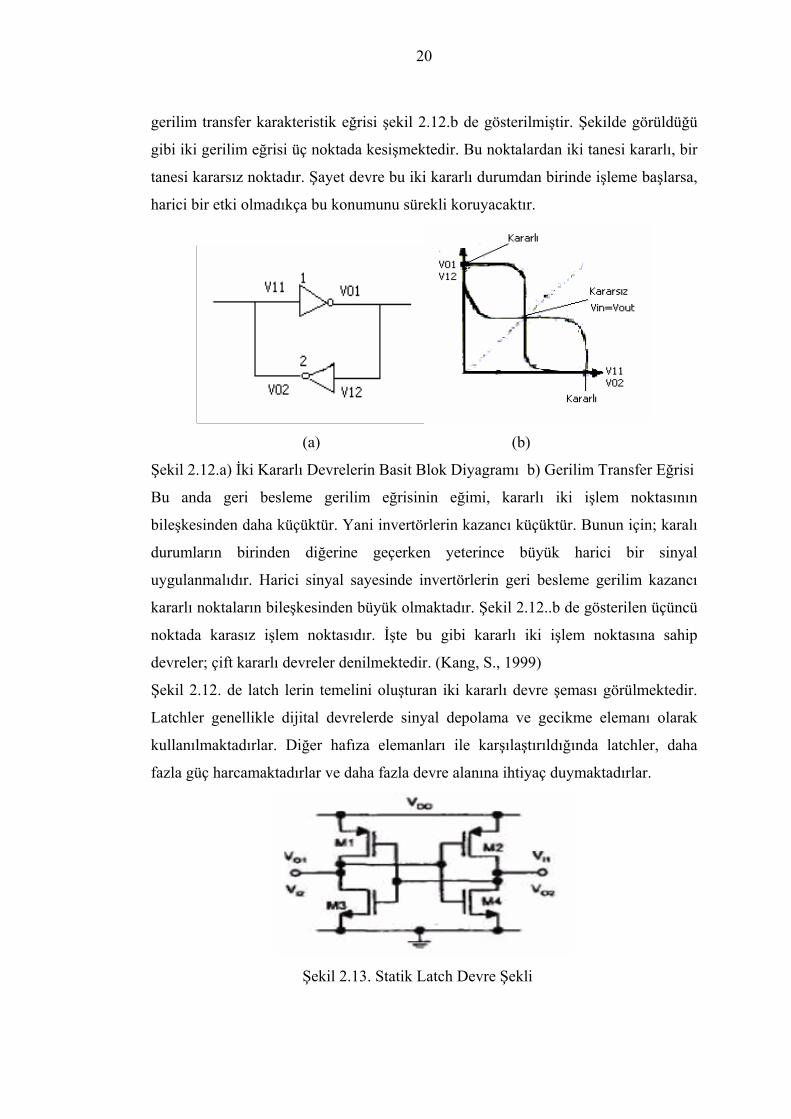
Şekil 2.12. de latch lerin temelini oluşturan iki kararlı devre şeması görülmektedir.
Latchler genellikle dijital devrelerde sinyal depolama ve gecikme elemanı olarak
kullanılmaktadırlar. Diğer hafıza elemanları ile karşılaştırıldığında latchler, daha
fazla güç harcamaktadırlar ve daha fazla devre alanına ihtiyaç duymaktadırlar.
Şekil 2.13. Statik Latch Devre Şekli

21
Şekil 2.13 de görüldüğü gibi Latchler, birbirine çapraz bağlı iki adet çeviriciden (
invertör ) oluşmaktadır. Bu şekildeki M1 ve M2 mosfetleri P-tipi, M3 ve M4
mosfetleri N-tipi mosfetlerdir. Kararsız işlem noktasında buradaki dört MOSFET de
saturation ( doyum ) bölgesindedir. Bu noktada, eğer devrenin ilk işlemi SET ise,
küçük gerilim sinyalleri transistorların işlem modunda önemli değişikliklere sebep
olacaktır. Bunun için her iki invertör çıkış geriliminde de değişiklik görülür. Örneğin
Şekil 2.14. de görüldüğü gibi, birinci invertörün çıkış gerilimi VoH değerini alırken,
ikinci invertörün çıkış gerilimi VoL değerini almaktadır.
Şekil 2.14. Gerilimin Değişim Eğrisi
Bu olay, küçük işaret analiz yöntemiyle Şekil 2.14. yardımıyla şu şekilde
açıklanabilmektedir.
Şekil 2.15. Kaskad Bağlı İki İnverter
Bu analizde; her iki invertörün giriş ( gate ) kapasitesi Cg, invertörlerin çıkış ( drain )
kapasitesi Cd den daha büyüktür( Cg>> Cd ). İlk önce, devrenin ( V01= V02= Vth )
kararsız işlem noktasında olduğunu varsayalım.
Şekil 2.15. de görüldüğü gibi her bir invertörün Drain akımı diğer invertörön gate
akımına eşit olmaktadır. Buna göre aşağıdaki eşitlik yazılabilir;
221 gmdg vgii ⋅== ……………...(6.1)
112 gmdg vgii ⋅==

22
Bu formüllerde kullanılan gm, invertörün küçük işaret geçiş iletkenliğini temsil
etmektedir. İnvertörlerin gate gerilimleri de şu şekilde ifade edilebilir;
gg C
qv 11 =
gg C
qv 22 = ……………...(6.2)
Her bir invertörün küçük sinyal gate akımı zamanın türevi şeklinde yazılabilir.
dtdv
Ci ggg
11 =
dtdv
Ci ggg
22 = ……………...(6.3)
Denklem 6.1 ile 6.3 birlikte düzenlenirse;
dtdv
Cvg gggm
12 =⋅ ……………...(6.4)
dtdv
Cvg gggm
21 =⋅ ..…...………..(6.5)
dtdqq
Cg
g
m 12 =⋅ ……………...(6.6)
dtdqq
Cg
g
m 21 =⋅ ……………...(6.7)
Denklem 6.6 ve 6.7 deki diferansiyel eşitlikler birlikte q1 in zamana bağlı davranışını
tanımlayarak ikinci dereceden diferansiyel eşitliği vermektedir.
21
2
1 dtqd
gC
qCg
m
g
g
m ⋅=⋅ ise 1
2
21
2
qCg
dtqd
g
m
= ……………...(6.8)

23
Bu eşitlik geçici durum sabitesi τ0 kullanılarak basitleştirilebilir,
120
21
2 1 qdtqd
τ= ile
m
g
gC
=0τ ……………...(6.9)
( ) ( ) ( ) ( ) ( )00
200
200 101101
1ττ ττ tt
eqq
eqq
tq+− +
+−
= …………….(6.10)
( ) ( )00 11 gg vCq ⋅= …………….(6.11)
( ) ( ) ( )( ) ( ) ( )( ) 00 002100
21
020020200202ττ ττtt
evvevvtv+−
++−= …………….(6.12)
( ) ( ) ( )( ) ( ) ( )( ) 00 002100
21
010010100101ττ ττtt
evvevvtv+−
++−= …………….(6.13)
t’nin büyük değerleri için zamana bağlı olan denklem 2.16 ve 2.17
basitleştirilebilmektedir, bu durumda denklemler şu şekilde yazılabilir.
( ) ( ) ( )( ) 00021
0100101ττt
evvtv+
+=
…………….(6.14)
( ) ( ) ( )( ) 00021
0200202ττt
evvtv+
+=
Burada görüldüğü gibi, her iki çıkış geriliminin de büyüklüğü zaman ile üstsel olarak
artmaktadır. dv01(0) ve dv02(0) küçük değerli polaritelere bağlı olarak, her bir
invetörün çıkış gerilimi ilk değeri olan Vth değerinden VOL yada VOH değerine
sapmaktadır. Dolayısıyla v01 her zaman v02 nin zıttı olmalıdır. Çünkü; bu iki çıkış
gerilimi bir birinin tersi değerleri almaktadır. Örneğin;
OHth
OLOHth
VOLyadaVVvyadaVVVv
→→
::
02
01 …………….(6.15)
gibi birbirinin zıttı değerleri almaktadırlar.

24
Şekil 2.16. İki Kararlı Devrelerin Davranışını Temsil Eden Faz Aralığı
v01 ve v02 arasındaki bu ilişkiyi yukarıdaki faz aralığı grafiği açıklamaktadır. V01=Vth,
V02=Vth işlem noktası karasız bölgeyi göstermektedir. V01=VOL , V02=VOH ve
V01=VOH, V01=VOL işlem noktaları da kararlı bölgeleri göstermektedirler.
Çift kararlı devreler kararsız işlem noktasından, kararlı işlem noktalarından birine
geçerken aşağıdaki şekilde görüldüğü gibi, sinyalin kaskad bağlı iki invertörden
oluşan döngüde birçok kez dolaşabileceği düşünülebilir.
Şekil 2.17. Kurma Süresince İki İnvertörden Oluşan Döngüdeki Geçici Durum
Sinyalinin Yayılım Gecikmesi

25
Bu periot süresince çıkış geriliminin ( v01 ) zamana bağlı davranışı şu şekilde olur;
( )( )
0
001
01 τt
evtv +
= …………….(6.16)
Döngü kazancını ( kaskad bağlı invertörlerin gerilim kazancı ) A harfiyle ifade
edersek;
0τt
n eA+
= …………….(6.17)
Olur. Bu eşitlik, kararlı noktalara erişene kadar sapmanın ( gecikmenin ) zamana
bağlı değişimini ifade etmektedir.
2.1.6.2. S – R LATCH
Şekil 2.18. de S ( SET ) ve R ( RESET ) girişleri olan basit CMOS SR Latch
görülmektedir. Bu devre iki adet CMOS NOR2 kapısı içermektedir. Her bir NOR
kapısının giriş terminallerinden bir tanesi diğer NOR kapısının çıkışı ile çapraz
olarak bağlanmıştır. SR Latch devresi bir birini tamamlayan Q ve Q’ çıkışlarına
sahiptir. Q çıkışı lojik ‘1’ iken Q’ çıkışı lojik ‘0’ dır. Aynı şekilde Q çıkışı lojik ‘0’
iken Q’ çıkışı lojik ‘1’ dir. Şekilden de kolaylıkla görülebileceği gibi her iki girişte
lojik ‘0’ olduğunda çıkış bir önceki çıkış konumunu korur. Şayet set girişi lojik ‘1’,
reset girişi lojik ‘0’ yapılırsa Q çıkışı lojik ‘1’ Q’ çıkışı lojik ‘0’ olur. Bunun anlamı
SR Latch, önceki durumunu önemsemeksizin set pozisyonunu alır demektir. Aynı
şekilde set girişi lojik ‘0’, reset girişi lojik ‘1’ yapılırsa Q çıkışı lojik ‘0’, Q’ çıkışı
lojik ‘1’ olur. Yani SR Latch önceki durumunu önemsemeksizin reset pozisyonunu
alır.

26
Eğer her iki girişte lojik ‘1’ yapılırsa; bu durumda her iki çıkış noktası da lojik ‘0’
olmaya zorlanacaktır. Bundan dolayı bu giriş kombinasyonuna normal çalışma
modunda izin verilemez. Bu devrenin doğruluk çizelgesi aşağıdaki gibidir.
Çizelge 2.1. S-R Latch Devresinin Doğruluk Çizelgesi
S R Q Q’ İş
0 0 Önceki Önceki Hold
1 0 1 0 Set
0 1 0 1 Reset
1 1 0 0 İzin verimez
Şekil 2.18. S-R Latch Devre Şekli
Şekil 2.18 deki dört nMOS transistorun ( M1, M2, M3, M4 ) işlem modları dikkate
alınarak devreyi daha ayrıntılı inceleyelim. Şayet set girişi VOH ve reset girişi VOL ise
paralel bağlanmış olan M1 ve M2 transistorları iletimdedir. Dolayısıyla, Q’
noktasındaki gerilim VOL = 0 kabul edilebilir (lojik-LOW). Aynı zamanda M3 ve M4
transistorları kesimdedir. Bunun sonucunda Q noktasındaki gerilim VOH dir. Eğer
reset girişi VOH ye eşit ve reset girişi VOL ye eşit ise M1 ve M2 kesimde, M3 ve M4
iletimde olur. Her iki giriş gerilimi de VOL ye eşit olursa, SR Latch devresinin önceki
durumuna bağlı olarak iki çıkış durumu oluşur. Bu durumlar aşağıdaki çizelgede
olduğu gibi özetlenebilir. Kolaylık olması için tamamlayıcı pMOS transistorların
işlem modları listelenmemiştir.
27
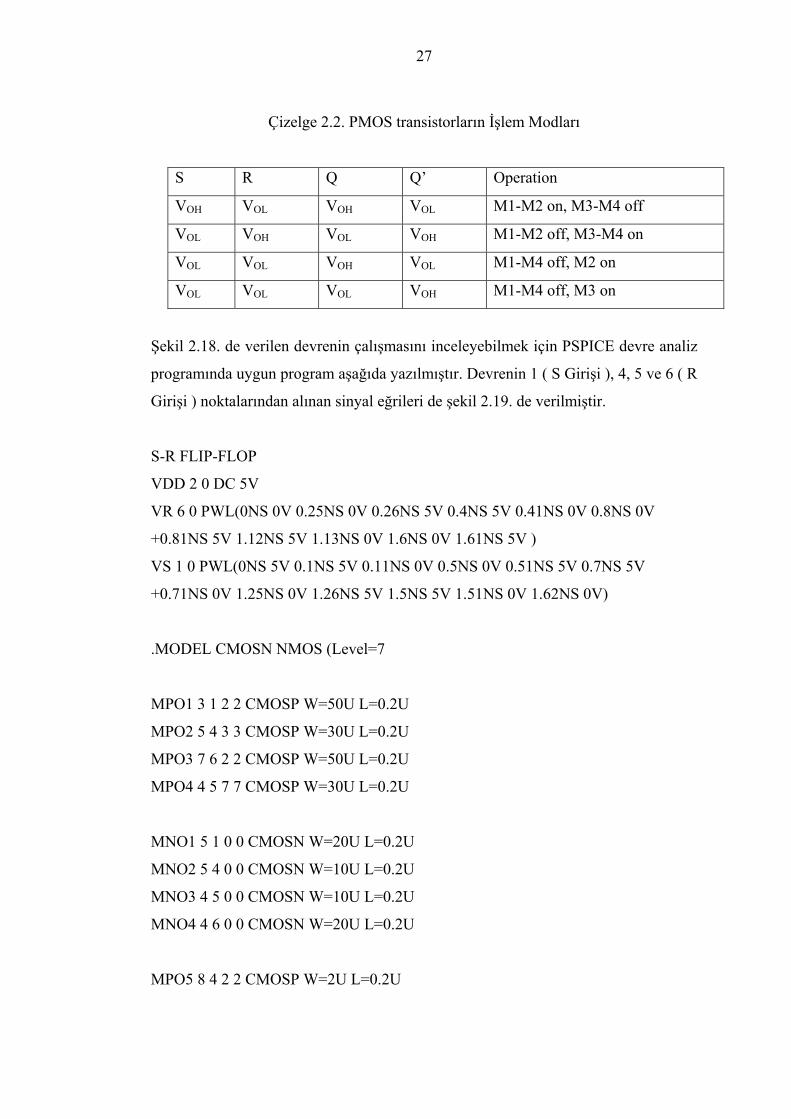
Çizelge 2.2. PMOS transistorların İşlem Modları
S R Q Q’ Operation
VOH VOL VOH VOL M1-M2 on, M3-M4 off
VOL VOH VOL VOH M1-M2 off, M3-M4 on
VOL VOL VOH VOL M1-M4 off, M2 on
VOL VOL VOL VOH M1-M4 off, M3 on
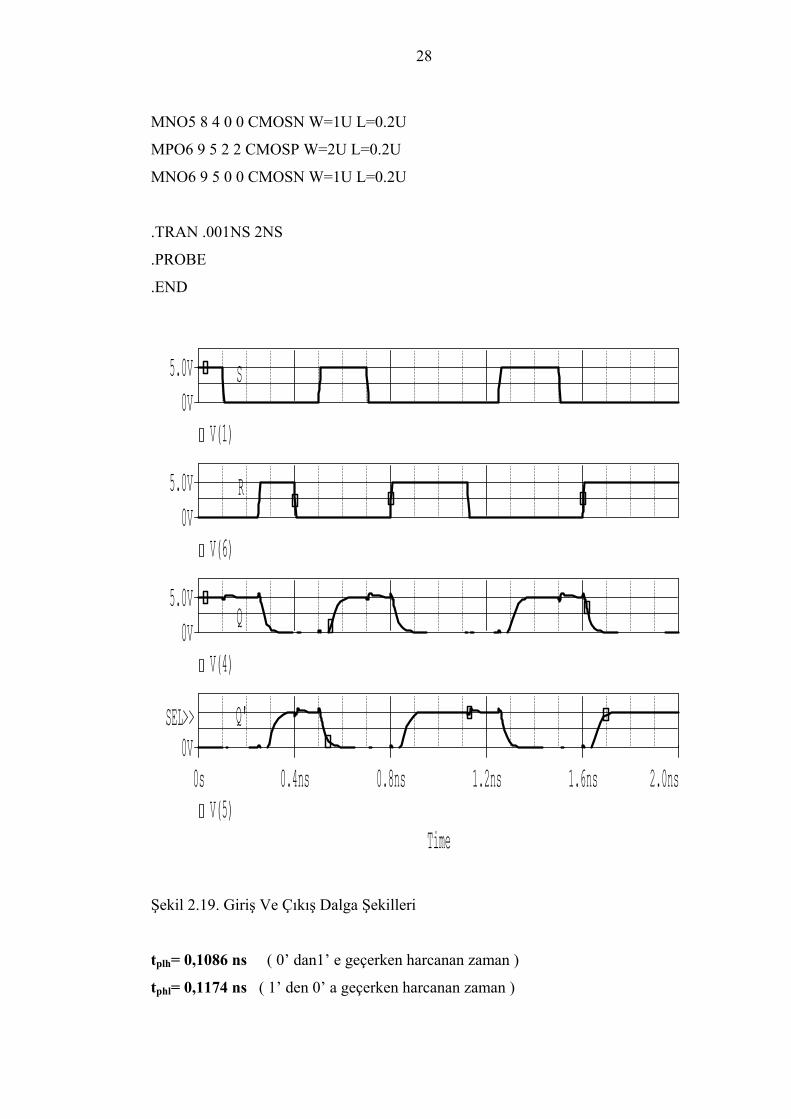
Şekil 2.18. de verilen devrenin çalışmasını inceleyebilmek için PSPICE devre analiz
programında uygun program aşağıda yazılmıştır. Devrenin 1 ( S Girişi ), 4, 5 ve 6 ( R
Girişi ) noktalarından alınan sinyal eğrileri de şekil 2.19. de verilmiştir.
S-R FLIP-FLOP
VDD 2 0 DC 5V
VR 6 0 PWL(0NS 0V 0.25NS 0V 0.26NS 5V 0.4NS 5V 0.41NS 0V 0.8NS 0V
+0.81NS 5V 1.12NS 5V 1.13NS 0V 1.6NS 0V 1.61NS 5V )
VS 1 0 PWL(0NS 5V 0.1NS 5V 0.11NS 0V 0.5NS 0V 0.51NS 5V 0.7NS 5V
+0.71NS 0V 1.25NS 0V 1.26NS 5V 1.5NS 5V 1.51NS 0V 1.62NS 0V)
.MODEL CMOSN NMOS (Level=7
MPO1 3 1 2 2 CMOSP W=50U L=0.2U
MPO2 5 4 3 3 CMOSP W=30U L=0.2U
MPO3 7 6 2 2 CMOSP W=50U L=0.2U
MPO4 4 5 7 7 CMOSP W=30U L=0.2U
MNO1 5 1 0 0 CMOSN W=20U L=0.2U
MNO2 5 4 0 0 CMOSN W=10U L=0.2U
MNO3 4 5 0 0 CMOSN W=10U L=0.2U
MNO4 4 6 0 0 CMOSN W=20U L=0.2U
MPO5 8 4 2 2 CMOSP W=2U L=0.2U
28
MNO5 8 4 0 0 CMOSN W=1U L=0.2U
MPO6 9 5 2 2 CMOSP W=2U L=0.2U
MNO6 9 5 0 0 CMOSN W=1U L=0.2U
.TRAN .001NS 2NS
.PROBE
.END
Time
0s 0.4ns 0.8ns 1.2ns 1.6ns 2.0nsV(5)
0VSEL>> Q'
V(4)0V
5.0VQ
V(6)0V
5.0V R
V(1)0V
5.0V S
Şekil 2.19. Giriş Ve Çıkış Dalga Şekilleri
tplh= 0,1086 ns ( 0’ dan1’ e geçerken harcanan zaman )
tphl= 0,1174 ns ( 1’ den 0’ a geçerken harcanan zaman )

29
SR Latch devresinin transient analizi, durum değişikliğindeki sonuçlar dikkate
alınarak açıklanacaktır. Set sinyali uygulanınca önceki reset konumundaki Latch set
oluyor yada reset sinyali uygulanınca set konumundaki Latch reset oluyor. Bie başka
durum, her iki çıkış noktası da eş zamanlı olarak gerilim geçişine uğrar. Çıkışlardan
biri düşük lojik seviyeden yüksek lojik seviyeye yükselirken diğeri çıkış noktası,
kendisinin yüksek lojik seviyesinden düşük lojik seviyeye geçer. Böylece, iki çıkış
noktasının eş zamanlı olarak anahtarlanması için zaman gereksiniminin miktarı bir
problem oluşturur. Bu problemin çözümü, her bir çıkış noktasının iki eş diferansiyel
denkleminin eş zamanlı çözümünü gerektirir. Şayet iki olay eş zamanlıdan ziyade
sıralı olarak meydana gelirse problem oldukça basitleştirilebilir. Bu kabul
anahtarlama zamanının fazla tahmin edilmesine sebep olabilir.
Her iki çıkış noktası için anahtarlama zamanının hesaplanmasında, her iki çıkış ile
toplam parazitik kapasitans bulunacaktır. Devredeki her bir kapasitans aşağıdaki
şekilde ifade edilebilir.
CQ = Cgb,2 + Cgb,5 + Cdb,3 + Cdb,4 + Cdb,7 + Csb,7 + Cdb,8
CQ’ = Cgb,3 + Cgb,7 + Cdb,1 + Cdb,2 + Cdb,5 + Csb,5 + Cdb,6
Set ‘1’ reset ‘0’ olduğu durumda, yükselme zamanı aşağıdaki gibi hesaplanabilir.
trise,Q (SR Latch)= trise,Q (NOR2) + tfall,Q’ (NOR2)
burada şunu unutmamak gerekir, trice,Q anahtarlama zamanını hesaplanmasında NOR2
kapısının yükselme ve düşme zamanları için iki ayrı hesaplamaya ihtiyaç duyulur. Q’
çıkış gerilimi M1 transistorunun iletime geçmesinden dolayı yüksek seviden alçak
seviyeye düşer. Bunu takiben Q çıkışı M3 transistorunun kesime gitmesi ile alçak
seviyeden yüksek seviyeye çıkar. Bu yöntemde M1 ve M2 transistorları kesimde
kabul edilebilir, gerçi M2 Q çıkışının yükselmesinden dolayı iletime geçebilir,
böylece Q’ noktasının düşme zamanını kısaltır. Bu yaklaşım, bununla birlikte,
gecikme zamanı için basit bir tahmin olarak kabul edilebilir.

30
2.1.7. STATİK LATCH DEVRESİNİN OPTİMİZASYONU
Set / Reset Latch, statik ardışıl devrelerde genellikle kullanılan yapılardan biridir. Bu
yapı, statik flip-flopların özünü oluşturmaktadır. Genellikle S / R latchler birbirine
çapraz bağlı iki adet NOR yada NAND kapısından oluşmaktadır. Bu her iki tip S / R
latch devresinde de kompleks pozitif geri besleme bloğu vardır. Bu geri besleme
bloğu SPICE yada diğer devre similatörlerinde geçici durum similasyonu ( transient
simulation ) yaparken fazla zaman tüketimi oluşturmaktadır. Bu problem fazla sayıda
latch içeren kopleks VLSI devrelerde daha kötü sonuçlar oluşturmaktadır. Bu
problemi gidermek için CMOS S / R latch devreleri için genel zamanlama
MACROMODEL leri geliştirilmektedir. Bu model uygulanırken öncelikle, CMOS
Latch lerin büyük sinyal eşdeğer devre karakteristik dalga şekilleri göz önüne
alınmaktadır (Burns, 1964). Daha sonra, devre lineer hale getirilmektedir.
Genel zamanlama mokromodeli uygulanarak, farklı CMOS S / R latch lerin ( farklı
kanal boyutlu, farklı kapasitif yüklü, farklı aygıt parametreli ve giriş dalga şekilli )
sinyal zamanlaması kolaylıkla ve tatmin edici doğrulukla hesaplanabilmektedir.
Bununla beraber bu makromodel, latchlerin hız karakteristik analizlerine, çeşitli
CMOS flip-flopların sinyal zamanının hesaplanmasına ve uygun kanal boyutlarının
belirlenmesine uygulanabilmektedir.
2.1.7.1. Makromodelin Yapısı
Bu makromodel oluşturulurken CMOS NAND tipi S / R latch kullanılmıştır. Bu
devrenin karakteristik dalga şekli SPICE devre tasarım programı kullanılarak elde
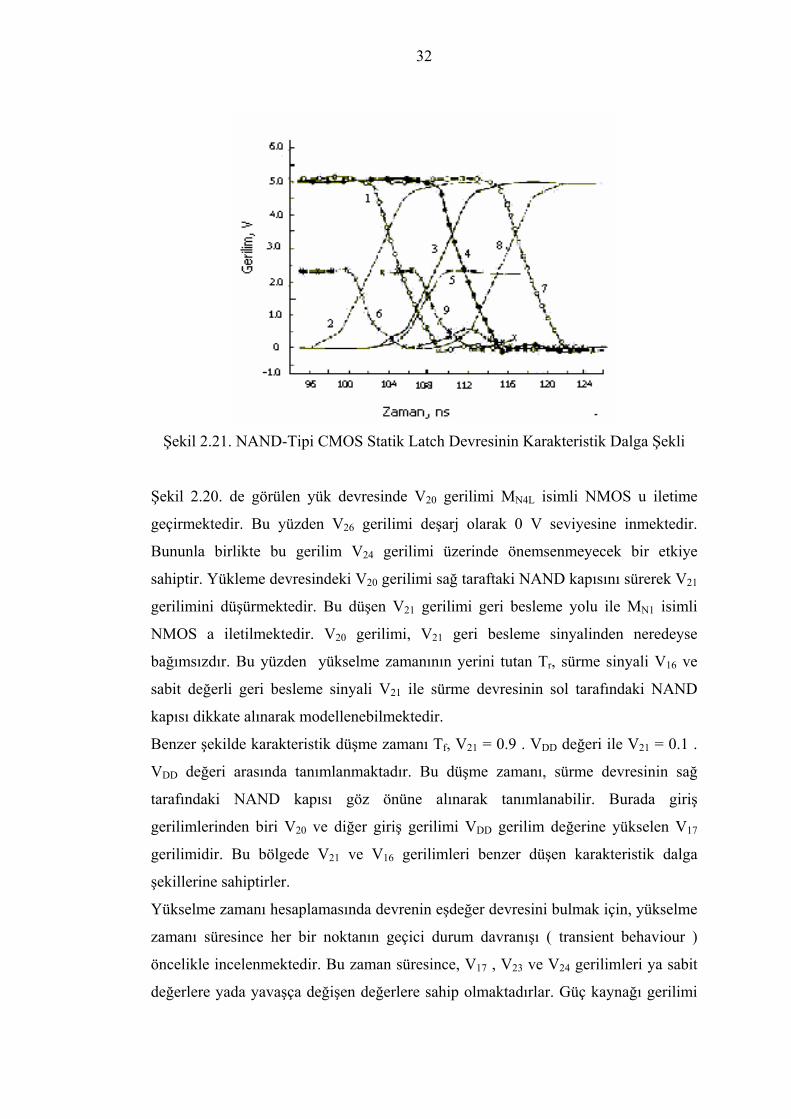
edilmiştir. Kullanılacak olan devre, şekil 2.20. de gösterilmektedir. Şekil 2.21. deki
dalga şekli üzerinde verilen numaralar, latch devresi üzerinde gösterilmiş olan
numaralardır.
Şekil 2.20 ve şekil 2.21 de görüldüğü gibi, sürme devresinin sağ tarafındaki NAND
kapısının giriş gerilimi olan V17 gerilimi artarken çıkış gerilimi olan V21 de herhangi
bir değişiklik olmamaktadır. Çünkü, o anda V20 gerilimi düşük ( low ) gerilim
seviyesindedir ve MN3 isimli NMOS kesimdedir. Dolayısıyla V21 gerilimi VDD
geriliminin seviyesindedir. Sürme devresinde sadece giriş gerilimi etkin olduğundan,

31
V16 gerilim değeri düşmektedir. Sürme devresinin sol tarafındaki NAND kapısının
giriş gerilimi V16 nedeniyle buranın çıkış gerilimi olan V20, yükselen karakteristik bir
dalga şekline sahiptir. Karakteristik yükselme zamanı Tr, V20= 0.1 . VDD değeri ile
V20 = 0.9 . VDD değeri arasında tanımlanmaktadır. Bu bölgede V17 gerilimi ile V20
gerilimi birbirine benzemektedir.
Şekil 2.20 NAND-Tipi CMOS Statik Latch Devre Şekli
32
Şekil 2.21. NAND-Tipi CMOS Statik Latch Devresinin Karakteristik Dalga Şekli
Şekil 2.20. de görülen yük devresinde V20 gerilimi MN4L isimli NMOS u iletime
geçirmektedir. Bu yüzden V26 gerilimi deşarj olarak 0 V seviyesine inmektedir.
Bununla birlikte bu gerilim V24 gerilimi üzerinde önemsenmeyecek bir etkiye
sahiptir. Yükleme devresindeki V20 gerilimi sağ taraftaki NAND kapısını sürerek V21
gerilimini düşürmektedir. Bu düşen V21 gerilimi geri besleme yolu ile MN1 isimli
NMOS a iletilmektedir. V20 gerilimi, V21 geri besleme sinyalinden neredeyse
bağımsızdır. Bu yüzden yükselme zamanının yerini tutan Tr, sürme sinyali V16 ve
sabit değerli geri besleme sinyali V21 ile sürme devresinin sol tarafındaki NAND
kapısı dikkate alınarak modellenebilmektedir.
Benzer şekilde karakteristik düşme zamanı Tf, V21 = 0.9 . VDD değeri ile V21 = 0.1 .
VDD değeri arasında tanımlanmaktadır. Bu düşme zamanı, sürme devresinin sağ
tarafındaki NAND kapısı göz önüne alınarak tanımlanabilir. Burada giriş
gerilimlerinden biri V20 ve diğer giriş gerilimi VDD gerilim değerine yükselen V17
gerilimidir. Bu bölgede V21 ve V16 gerilimleri benzer düşen karakteristik dalga
şekillerine sahiptirler.
Yükselme zamanı hesaplamasında devrenin eşdeğer devresini bulmak için, yükselme
zamanı süresince her bir noktanın geçici durum davranışı ( transient behaviour )
öncelikle incelenmektedir. Bu zaman süresince, V17 , V23 ve V24 gerilimleri ya sabit
değerlere yada yavaşça değişen değerlere sahip olmaktadırlar. Güç kaynağı gerilimi
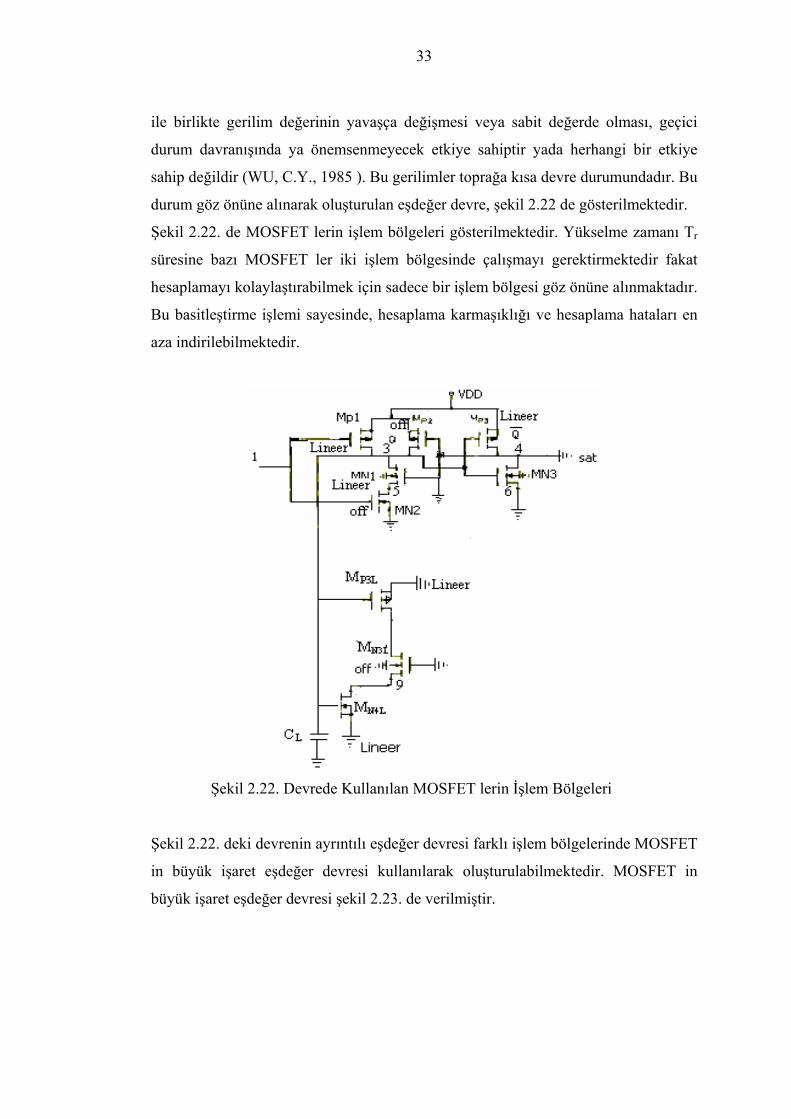
33
ile birlikte gerilim değerinin yavaşça değişmesi veya sabit değerde olması, geçici
durum davranışında ya önemsenmeyecek etkiye sahiptir yada herhangi bir etkiye
sahip değildir (WU, C.Y., 1985 ). Bu gerilimler toprağa kısa devre durumundadır. Bu
durum göz önüne alınarak oluşturulan eşdeğer devre, şekil 2.22 de gösterilmektedir.
Şekil 2.22. de MOSFET lerin işlem bölgeleri gösterilmektedir. Yükselme zamanı Tr
süresine bazı MOSFET ler iki işlem bölgesinde çalışmayı gerektirmektedir fakat
hesaplamayı kolaylaştırabilmek için sadece bir işlem bölgesi göz önüne alınmaktadır.
Bu basitleştirme işlemi sayesinde, hesaplama karmaşıklığı ve hesaplama hataları en
aza indirilebilmektedir.
Şekil 2.22. Devrede Kullanılan MOSFET lerin İşlem Bölgeleri
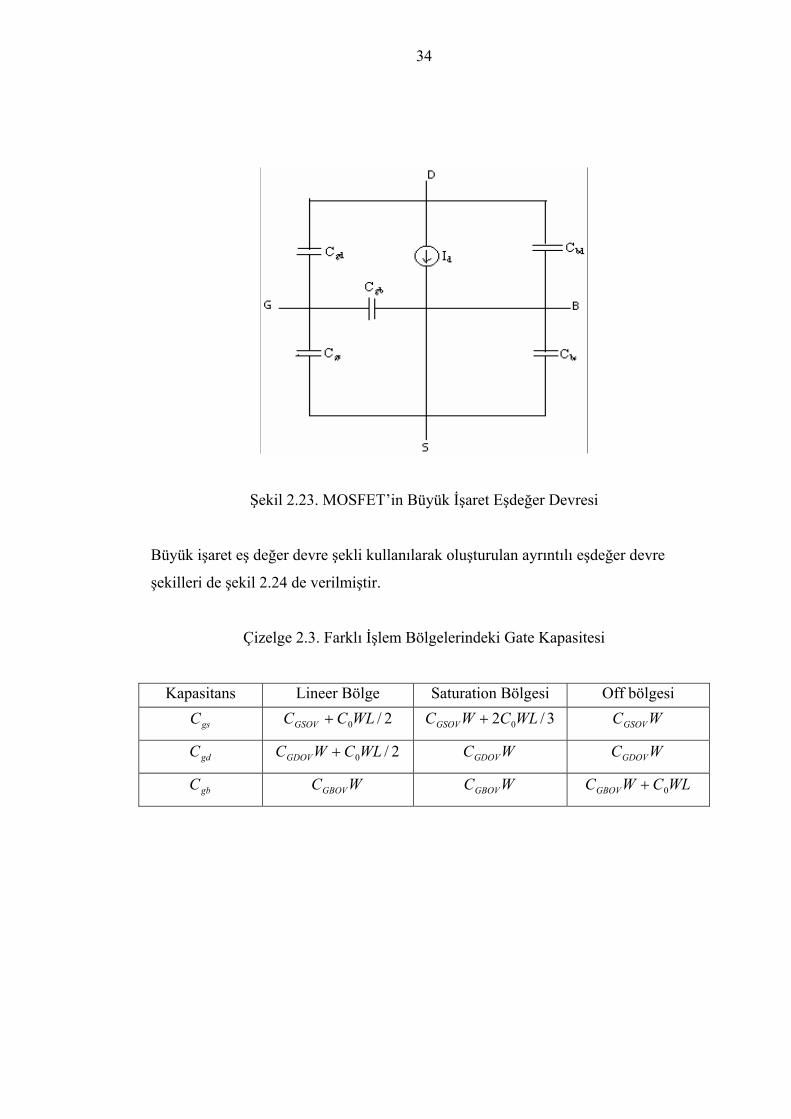
Şekil 2.22. deki devrenin ayrıntılı eşdeğer devresi farklı işlem bölgelerinde MOSFET
in büyük işaret eşdeğer devresi kullanılarak oluşturulabilmektedir. MOSFET in
büyük işaret eşdeğer devresi şekil 2.23. de verilmiştir.
34
Şekil 2.23. MOSFET’in Büyük İşaret Eşdeğer Devresi
Büyük işaret eş değer devre şekli kullanılarak oluşturulan ayrıntılı eşdeğer devre
şekilleri de şekil 2.24 de verilmiştir.
Çizelge 2.3. Farklı İşlem Bölgelerindeki Gate Kapasitesi
Kapasitans Lineer Bölge Saturation Bölgesi Off bölgesi
gsC 2/0WLCCGSOV + 3/2 0WLCWCGSOV + WCGSOV
gdC 2/0WLCWCGDOV + WCGDOV WCGDOV
gbC WCGBOV WCGBOV WLCWCGBOV 0+

35
Şekil 2.24. a) Yükselme Zamanı b) Düşme Zamanı

36
Yükselme Zamanı Durumu
LLNNONNGDOVNNGSOVNPPOPPGDOVP
PGSOVPNGDOVNNNONBDNPGDOVPBDPBDP
NCCLWCWCWCLWCWCWCWCLWCCWCCCC
13333333
311112211
2/22/
++++++++++++++=
LNLNON
LNGDOVNLNGSOVNLPLPOPLPGDOVPLPGSOVPL
LWCWCWCLWCWCWCC
44
4433331
+++++=
2/111212 NNONNGSOVNBDNBSN LWCWCCCC +++=
23 NGDOVNWCC = 2/1114 PPOPPGDOVP LWCWCC +=
( ) ( )
( )
−−
+−−−−≅
−
DRFPP
DD
DDFPSPDDPBINSPDDPP
tPV
VVVV
R
F
exp4
3/4/2218/7 21
1111111
φγηηβα
( )
+−−−= 3/4/3228/7 2
1
111112 DDFNSNDDNBINSNDDN VVVV φγηβα
( ) ( )[ ]
−+−−−−= 3/4/3228/ 2
1
111113 TNFDDFNSNNTNFDDBINSNDDN VVVVVV φγηβα
Düşme Zamanı Durumu
LLPGSOVP
PPOPNGDOVNNNONBDNPGDOVPBDPBDP
CNCWCLWCWCLWCCWCCCC
22
2211134431 2/′+++
++++++=′
3/2 22
2222222
LPLPOP
LPGDOVPLPGSOVPLNLNONLNGDOVNLNGSOVNL
LWCWCWCLWCWCWCC
+++++=′
2/2/ 333344442 NNONNGSOVNBSNNNONNGDOVNBDN LWCWCCLWCWCCC +++++=′ 2/33333 NNONNGDOVNPGDOVP LWCWCWCC ++=′
( )( )
+−
−−−−≅′−
3/4/22
8/exp4
21
33
3331
DDFNSN
DDNBINSNdfRPP
DDDDN
V
VVtPVV R
F
φγ
ηβα
( )( )
+−
−−−≅′
−
3/10/22
20/exp4
21
33
3332
DDFNSN
DDNBINSNdfrPP
DDN
V
VVtPV r
F
φγ
ηβα
( )
+−−−≅′ 3/10/2220/ 2
1
444443 DDFNSNDDNBINSNDDN VVVV φγηβα
Şekil 2.25. Yükselme ve Düşme Zamanlarındaki Kapasite ve İletkenlik Faktörleri

37
Kararkteristik dalga şekli neredeyse giriş sinyallerinden bağımsızdır. Bu şunu ifade
etmektedir; çıkış gerilimi V20 şekil 2.25.a) daki devrenin kutupları yada sıfırlarına
bağlıdır. Çıkış gerilimi V20 nin zamanlama sinyalini kutuplar ve sıfırlar ( poles and
zeros ) vasıtasıyla tanımlamak için, lineer olmayan şekil 2.25.a) daki devrenin lineer
hale getirilmesi gerekmektedir. Devreyi lineer hale getirmek için kullanılacak olan
teknik öncelikle, pn birleşme noktası kapasitansı ve drain akımının lineer hale
getirilmesini gerektirmektedir ( WU, C.Y., 1985 ).
Lineer hale getirilen noktada t=te seçildikten sonra, her bir MOSFET için bulk-source
ve drain-source gerilimleri GSV ′ , BSV ′ ve DSV ′ tanımlanabilmektedir. Lineer noktada
pn birleşme yeri kapasitansları CBD ve CBS SPICE2 programındaki formül
kullanılarak hesaplanabilmektedir ( VLADIMIRESCU, A., LIU, S., 1985 ).
Drain akımını lineer hale getirme işleminde, SPICE2 programındaki lineer bölge
drain akımı,
( ) ( )
161202
11
201612021
20111111
2/
3/221
VVV
VVVVVVVI
DDPPP
PDDFPSPDDPBINSPPdP
βηβ
βφγηβ
++
−
′−+−−−−=
..(1)
( )
( ) 2/3/22
2/3/22
222
112221
221111
202
112021
2011111
VVVVV
VVVVVı
NNFNSNBINSNDDN
NNFNSNBINSNDDNdN
ηβφγβ
ηβφγβ
−
′+−−−
−
′+−−=
..(2)
Denklemlerdeki V16 ve V20 gerilimleri zaman domainninde tanımlanmalıdır.
( ) ( ) ( )tutPVtV fDD −= exp16 ..(3)
( ) ( )[ ] ( ) drdrrDD ttuttPVtV −−−−= exp120 ..(4)
( ) ( ) ( )[ ] ( )2222 exp1 drdrrTNFDD ttuttPVVtV −⋅−−−−= ..(5) tdr ( tdr2 ) V16 ve V20 gerilimlerinin dalga şekilleri arasındaki ilk yükselme zamanıdır. MN1 MOSFET inin eşik ( Threshold ) gerilimi VTNF şu şekilde ifade edilebilmektedir;

38
( )
( ) ( ) 2/224222
2/22
21
2212
221
21
−++
+−+
+
−−=
TNDDSNFNTNSNSNTNFNSN
SNTNFNSNTNF
VVVV
VV
γφγγφγ
γφγ
(6a)
( )21
2 FNSNBINNTN VV φγ+≡ …..(6b) Genellikle lineer hale getirme işlemi, hesaplama hatalarını en aza indirmektedir.
Lineerleştirme için en ideal durum, MOSFET in lineer bölgesinin merkez noktasıdır.
Bu yüzden lineer nokta 4/320 DDVV = olarak seçilebilmektedir. Böylece zaman t=te
şu şekilde ifade edilebilmektedir;
( ) rdre PTt /4ln+= .....(7)
Benzer teknik kullanılarak eşitlik 1 ve 2 deki 20
2V , 16V , 20V ve 222V gerilimleri
lineer hale getirilebilmektedir. Sonuç olarak IdP1 ve IdN1 şu şekilde ifade
edilebilmektedir;
2011 VIdP α= ………..(8)
2232021 VVIdN αα −= ………. (9)
1α , 2α ve 3α iletkenlik faktörleri çizelge 2 de verilmiştir. 1α denkleminde verilen
drf tP farklı durumlar için neredeyse sabit değere sahiptir. Bu yüzden 0.7 olarak ifade
edilmektedir.
Lineer hale getirilmiş kapasitans ve akımların, baskın kutup PD baskın sıfır ZD
değerleri analitik olarak şu şekilde ifade edilebilmektedir.
[ ] 2/////1 31223211 ααααα CCCPD ++= ………(10)
( )[ ]43342 2//1 CCCCZD α= ………(11) Baskın kutup-Baskın sıfır ( DPDZ ) metoduna göre (WU, C.Y., 1985 ), etkin
karakteristik yükselen kutup Pr değeri de şu şekilde ifade edilebilmektedir;
DDr ZPP /1/1/1 −= ………(12)

39
LİNEER HALE GETİRİLMİŞ MOSFET DRAİN AKIMI EŞİTLİĞİ
( ) ( ) ( )
′−+−′−′+−
−−= BSBSFSBSDSBSDSFSDSDSBINGSd VVVVVVVVVVI 2
121
2322
32
2φγφγηβ
OSCLW µβ ′=
OXSIO TC /20 ε=
( )[ ] UEXPFDSTHGSOSIS VUTRAVVCUCRITUO φεµ 2min/ ′⋅−−′⋅=′ ( )( )BSFBIBIN VVV −−+= φη 21 ( ) FBIBINS VV φη 21−+=
FTOFFBBI GAMMAVVV φφ 22 ⋅−=+= ( ) ( )WCDELTA OSI 4/1 επη ⋅⋅+=
( )DSS GAMMA ααγ −−⋅= 1
( ) ( )
−+= 1/21/
21
21
XJWLXJ SSα
( ) ( )
−+= 1/21/
21
21
XJWLXJ DDα
( )21
2 BSFS VXDW ′−= φ
( )21
2 DSBSFD VVXDW ′+′−= φ
( )21
/2 NSUBqX SID ⋅= ε
( )21
2 BSFSBINTH VVV ′−+= φγ ( ) 0ttDSDS tVV ==′
( ) 0ttBSBS tVV ==′
( ) 0ttGSGS tVV ==′
0t
Şekil 2.26. Mosfetin Drain Akımının Denklemleri
V21 geriliminin karakteristik düşen kutbunu hesaplamak için, giriş gerilimi V20 ve
uygun yük göz önüne alınmaktadır. Büyük işaret eşdeğer devresi şekil 2.25.b) de
gösterildiği gibi benzer şekilde bulunabilmektedir. V23 geriliminin dalga şekli,
devrelerdeki farklı eleman boyutları için farklılık göstermektedir. V21 =VDD / 4

40
linearisation poin de düşen dalga şekline sahiptir ve düşen kutup ve ilk gecikme tdf2
ile şu şekilde tanımlanabilmektedir;
( ) ( ) ( ) ( )[ ] ( ) ( )[ ] ( )22223 exp dfdffTNFDDdfTNFDD ttuttPVVttutuVVtV −⋅−−−+−−−= ..(13) lineer hale getirilen noktada V23 gerilimi yaklaşık olarak VDD / 10 olduğundan, V2
23
şu şekilde ifade edilmektedir;
( ) ( ) 10/23232 tVVtV DD→
DPDZ metoduna göre düşen kutup Pf şu şekilde ifade edilebilmektedir,
( ) ( ) ( )[ ] 132332313213211211 2/////// −′+′′−′′+′′′′+′′+′′′′+′′= ααααααααααα CCCCCCPf .(14)
kapasiteler C'1, C'
2, C'3 ve iletkenlik faktörleri α'
1, α'2 ve α'
3 Çizelge 7.2. de
listelenmiştir.
Yükselme zamanı Tr ve düşme zamanı Tf, Pr ve Pf formülleri kullanılarak
çözümlenmiştir.
( ) rr PT /9ln= ………(15)
( ) ff PT /9ln= ………(16)
V16 = VDD / 2 ve V20 = VDD /2 zaman aralığında tanımlanan yükselme zamanı
TPLH,deneysel olarak şu şekilde ifade edilebilmektedir.
frfrPHL TTTXTXT 11.066.021 −=+= ………(17)
denklem 17 deki X1 ve X2 farklı CMOS NAND-tipi S/R latchler için uluslar arası
sabitlerdir. Bu değerler sırasıyla 0.66 ve -0.11 olarak kabul edilmektedirler. Bu
denklemdeki TPLH S' ve Q arasındaki zaman gecikmesini ifade etmektedir.
Benzer şekilde TPHL , Q ve Q' arasındaki zaman gecikmesini ifade etmektedir ve şu
şekilde formüle edilmektedir;

41
rfPHL TTT 05.073.0 −= ………(18)
Her iki gecikme zamanının toplamı ( pair delay ) Tp , TPLH Ve TPHL değerlerini
toplayarak elde edilebilir;
frP TTT 62.061.0 += ………(19)
Tp giriş S' ve çıkış Q' arasındaki veya R' ve Q arasındaki zaman gecikmesini ifade
etmektedir. Bu gecikme latchlerin yayılım gecikmesi olarak bilinmektedir.
NAND-tipi S/R latch devrelerinde her iki girişinde sıfır olması durumunda belirsiz
bir durum oluşmaktadır. Dolayısıyla, latchlerin gecikme zamanının tanımlanmasında
sade üç giriş durumu dikkate alınmaktadır. Bu giriş durumları;
S' R' : 10 --- 01 ……………..(20a)
11 --- 01 …………….(20b)
11 --- 10 ……………..(20c)
Eşitlik 20a daki durum için, her iki giriş … ve … uyarılmaktadır. Bu durum yukarıda
modellenmiştir. Latchlerin simetrik yapısından dolayı birbirinin aynı olan diğer iki
durum için, sinyal zamanlaması benzer şekilde girişlerden biri lojik 1 diğeri 0 iken
modellenebilmektedir.

42
2.1.7.2. S/R Latch Similasyonu
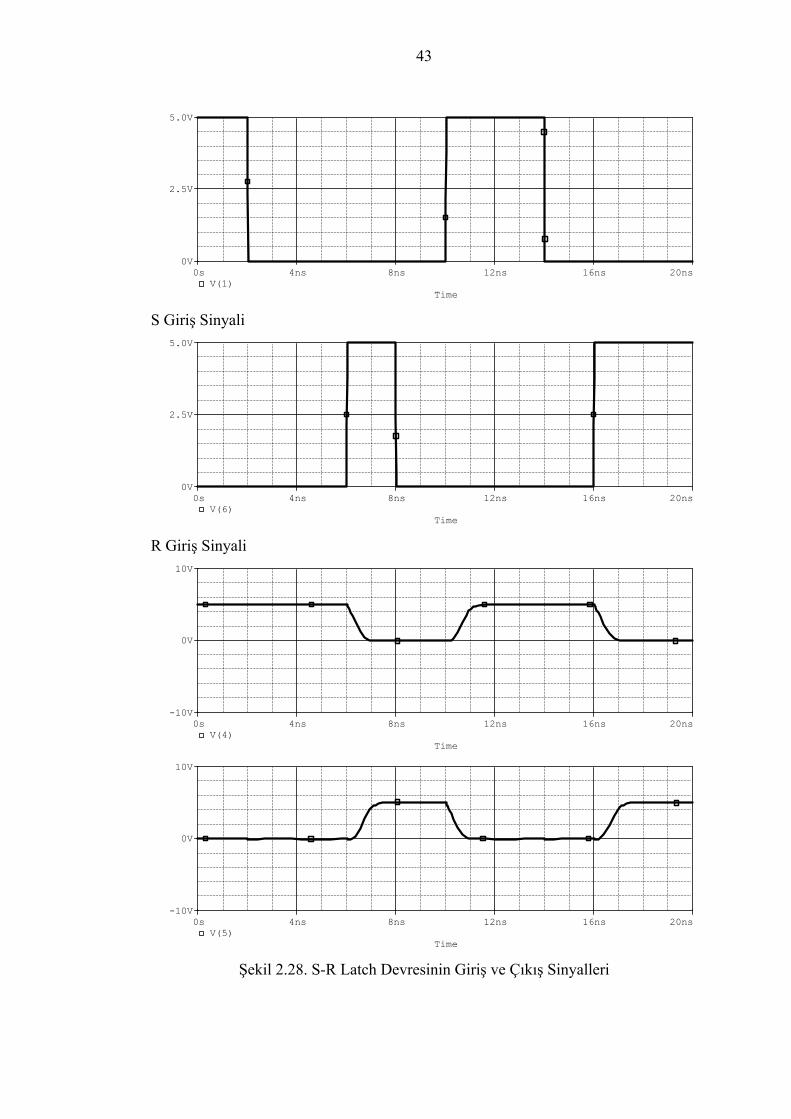
Şekil 2.27. S-R Latch Devre Şekli
S-R Latch
VDD 2 0 DC 3.15V
VR 6 0 PWL(0NS 0V 6NS 0V 6.02NS 5V 8NS 5V 8.02NS 0V 16NS 0V
+16.02NS 5V 22NS 5V 22.02NS 0V 32NS 0V 32.02NS 5V )
VS 1 0 PWL(0NS 5V 2NS 5V 2.02NS 0V 10NS 0V 10.02NS 5V 14NS 5V
+14.02NS 0V 25.6NS 0V 25.62NS 5V 30NS 5V 30.02NS 0V 34NS 0V)
.MODEL CMOSN NMOS (Level=7
MPO1 3 1 2 2 CMOSP W=10U L=0.2U
MPO2 5 4 3 3 CMOSP W=10U L=0.2U
MPO3 7 6 2 2 CMOSP W=10U L=0.2U
MPO4 4 5 7 7 CMOSP W=10U L=0.2U
MNO1 5 1 0 0 CMOSN W=2U L=0.2U
MNO2 5 4 0 0 CMOSN W=2U L=0.2U
MNO3 4 5 0 0 CMOSN W=2U L=0.2U
MNO4 4 6 0 0 CMOSN W=2U L=0.2U
C1 4 0 350ff
C2 5 0 350ff
.TRAN .1NS 20NS
.PROBE
.END
43
Time
0s 4ns 8ns 12ns 16ns 20nsV(1)
0V
2.5V
5.0V
S Giriş Sinyali
Time
0s 4ns 8ns 12ns 16ns 20nsV(6)
0V
2.5V
5.0V
R Giriş Sinyali
Time
0s 4ns 8ns 12ns 16ns 20nsV(4)
-10V
0V
10V
Time
0s 4ns 8ns 12ns 16ns 20nsV(5)
-10V
0V
10V
Şekil 2.28. S-R Latch Devresinin Giriş ve Çıkış Sinyalleri

44
Şekil 2.28. deki devre PSPICE programında gerçekleştirilmiştir. Öncelikle devrenin
çıkışına kapasitif yük bağlanmamıştır. Bu durumda devrenin yayılım gecikmesi,
düşme zamanı gecikmesi ( lojik 1 seviyesinden lojik 0 seviyesine geçerken harcanan
zaman ) ve yükselme zamanı gecikmesi ( lojik 0 seviyesinden lojik 1 seviyesine
geçerken harcanan zaman ) ölçülmüştür. Daha sonra çıkışa bir kapasitif yük
bağlanmıştır ve yayılım gecikmesi, düşme zamanı gecikmesi ve yükselme zamanı
gecikmesi yeniden ölçülmüştür. Bu işleme kondansatörün değerini 100 fento farad (
ff ) arttırılarak devam edilmiştir. Şekil 2.29., Şekil 2.30. ve Şekil 2.31. den de
görülebileceği gibi çıkışa bağlanan yükün değerini arttırmak zaman gecikmelerini
arttırmaktadır.
0,36410,8459
1,19721,6149
1,9952,4423
2,80123,3083
3,696
00,5
11,5
22,5
33,5
4
0 100 200 300 400 500 600 700 800
Kapasitif Yük, ff
Yayı
lım G
ecik
mes
i, ns
Şekil 2.29.Kapasitif Yüke Bağlı Olarak Yayılım Gecikmesinin Değişimi
0,17910,4179
0,54020,7189
0,9211,1293
1,30821,5173
1,756
00,20,40,60,8
11,21,41,61,8
2
0 100 200 300 400 500 600 700 800
Kapasitif Yük, ff
Düş
me
Zam
anı G
ecik
mes
i, ns
Şekil 2.30. Kapasitif Yüke Bağlı Olarak Düşme Zamanı Gecikmesinin Değişimi

45
0,1850,428
0,6570,896
1,0741,313
1,4931,791
1,94
0
0,5
1
1,5
2
2,5
0 200 400 600 800 1000
Kapasitif Yük, ff
Yüks
elm
e Za
manı G
ecik
mes
i, ns
Şekil 2.31. Kapasitif Yüke Bağlı Olarak Yükselme Zamanı Gecikmesinin Değişimi
Aynı devrede çıkışa sabit bir yük bağlanarak kaynak geriliminin değerinin zaman
gecikmelerine etkisi de ölçülmüştür. Şekil 2.32. da kaynak geriliminin değerinin
değişiminin yayılım gecikmesine etkisi gösterilmiştir. Şekil 2.32 dan da görüldüğü
gibi kaynak geriliminin değerinin artması yayılım gecikmesini arttırmaktadır. Fakat
kaynak geriliminin arttırılması, devrenin güç harcamasını arttıracağından gecikmenin
fazla değişmediği bir değerde kaynak gerilimi seçilmelidir.
0
0,5
1
1,5
2
2,5
3
1 1,5 2 2,5 3 3,5 4 4,5 5 5,5
Kaynak Gerilimi, V
Yayı
lım G
ecik
mes
i
Şekil 2.32. Kaynak Gerilimine Bağlı Olarak Yayılım Gecikmesinin Değişimi

46
2.2. YÖNTEM
2.2.1. BULANIK MANTIK
Niteliği tam anlaşılamayan, iyi seçilmeyen, açık seçik görünmeyen, net olmayan
şeklinde tanımlanan bulanıklık, dereceli üyelik kavramı yardımıyla teknik bilim
dünyasına da taşınmıştır. Bulanık kümelerde dereceli üyelik tanımını ilk kez 1965
yılında Kaliforniya Üniversitesinden Azeri kökenli Prof.Dr. Lotfi ZADEH ( Lütfü
ZADE ) yapmıştır (Vsif NABİYEV, 203).
Bir çok sosyal, iktisadi ve teknik konularda insan düşüncelerinin tam anlamıyla
olgunlaşmamış oluşundan dolayı belirsizlikler bulunmaktadır. İnsanlar tarafından
geliştirilmiş olan bilgisayarlar bu tür belirsizlikleri işleyememektedirler ve
çalışmaları için sayısal bilgilere ihtiyaç duymaktadırlar.
Dünyada insan oğlunun karşılaştığı olayların hemen hemen hepsi karmaşıktır. Bu
karmaşıklık genel olarak belirsizlik, kesin düşünce ve karar verilemeyişten
kaynaklanmaktadır. Bu durumda gerçek bir olay insan zihninde yaklaşık olarak
canlandırılarak yorumlanır. Bilgisayarların kullandığı ARİSTO Mantığından farklı
olarak; insanın belirsizlik içeren veri ve bilgi ile işlem yapabilme yeteneği vardır.
Bulanık mantık kavramı, rasgele değişkenlerden ziyade kesin olmayan yaklaşık
bilgiler içermektedir (Kayacan C.,2003).
Bulanık ilkeler hakkında ilk bilgiler Lütfü ASKERZADE tarafından literatüre mal
edilmesine karşılık bu fikirler batı dünyasında şüpheyle karşılanmış ve oldukça
yoğun tenkit almıştır. Ancak 1970 yılından sonra özellikle Japonya’da bulanık
mantık ve sistem kavramlarına önem verilmiştir. Bulanık mantık sistemlerinin,
teknolojik cihaz yapım ve işleyişinde kullanılması sonrasında bu teknik tüm dünyada
yaygın olarak kullanılmaktadır (Şen Z., 1999).
Bulanık mantığın en geçerli olduğu iki durumdan ilki, incelene olayın çok karmaşık
olması ve bununla ilgili yeterli bilginin bulunmaması durumunda kişilerin
görüşlerine yer verilmesidir. İkincisi ise, insan muhakemesine, kavrayışlarına ve
karar vermesine ihtiyaç göstermesidir. İnsanın fizik olayları hakkındaki bilgi ve
yorumlarının çoğu kişisel görüşleri şeklinde ortaya çıkmaktadır. Bu bakımdan insan
düşüncesinde sayısal olmasa bile belirsizlik, faydalı bir bilgi kaynağıdır. Bu tür bilgi

47
kaynaklarının, olayların incelenmesinde sistematik bir biçimde kullanılmasına
bulanık mantık ilkeleri yardımcı olmaktadır. Mühendislik modellemelerinde,
kesinliğin kazanılmasına uğraşılması durumunda maliyetlerin artması ve zamanın
uzaması söz konusu olmaktadır. Ancak olayın bulanık mantık ile incelenmesinde
araştırıcı her şeyden önce yapacağı çıkarımların belirli bir tolerans sınırları içinde
kalmasını önceden karara bağlaması gerekmektedir. Yüksek doğruluk sadece yüksek
maliyet değil, aynı zamanda sorunun çözülmesinin çok karmaşıklaşmasına da sebep
olmaktadır.
2.2.2. KLASİK VE BULANIK KÜMELER
Klasik kümelerin üyelik dereceleri Aristo mantığına göre sadece 1 veya 0
değerlerinden bir tanesini alabilmektedir. Klasik küme, kümeye kesinlikle ait veya
kesinlikle ait değil biçiminde iki grubun oluşturulmasıyla anlamlıdır. Klasik kümede
üye olanlarla olmayanlar arasında kesin bir fark vardır. Klasik kümelerin
karakteristik fonksiyonu, evrensel kümede her bireye ya 1 yada 0 değerini
atamaktadır. Bu üye olma veya olmama anlamına gelmektedir.
Bulanık küme, kesin geçişleri elimine ederek belirsizlik kavramının tanımını yeniden
verir ve evrendeki bütün bireylere üyelik derecesi değerini atayarak matematiksel
olarak tanımlamaktadır. Bu derece, bulanık küme tarafından verilen kavram ile
uyumludur ve benzer bir bireyin derecesine uyar. Böylece bireyler, bulanık küme
içerisinde üyelik dereceleri tarafından gösterilen daha büyük ve daha küçük değerlere
ait olabilmektedirler. Bu üyelik dereceleri [0-1] aralığında gerçel değerler ile ifade
edilmektedirler.
Kümeler büyük harflerle elemanlar ise küçük harflerle gösterilmektedir. Bulanık
kümeler A harfiyle gösterilmektedirler. Bulanık kümede yatay eksendeki gerçek
sayıların her biri düşey eksende 0 ve 1 arasında değişen üyelik derecelerine
dönüştürülmektedir. Böylece yatay eksendeki bir gerçek sayı x ile gösterilirse bunun
üyelik derecesi µA(X) şeklinde gösterilmektedir.
Bulanık kümenin her elemanı, küme içerisinde bir üyelik değerine sahiptir ve A
bulanık kümesinin bu değerleri [0-1] aralığında değişmektedir. U evrensel kümesi

48
sonlu sayıda u1 , u2 , u3 …, un, kümelerinden oluşursa bulanık A kümesi Zade’nin
açılım ilkesine göre aşağıdaki gibi ifade edilmektedir.
∑=
=+++=n
i i
iA
n
nAAA
uu
uu
uu
uuA
12
2
1
1 )()(....)()( µµµµ …….(14.6)
Eğer U süreklilik taşıyan bir küme ise bu bağıntı şu şekilde ifade edilebilmektedir;
∫=U
A
uuA )(µ …….(14.7)
formül (14.7 deki toplama işareti cebirsel toplama olmayıp, A kümesinin tanımında
eleman çiftleri ve üyelik derecelerinin topluca ifade edilmesi amacıyla
kullanılmaktadır. Bölme işareti U evrensel kümesinde, A bulanık kümesinin sıfır
olmayan üyelik derecelerine sahip olan tüm elemanlarını, yine bunların A’daki
üyelik dereceleri ile birleştirmektedir.
2.2.3. Üyelik Fonksiyonları
Göz önünde tutulan bir bulanık kelime veya ifadenin temsil ettiği bir sayısal aralık o
ifade hakkında bilgi sahibi olan kişiler tarafından belirlenebilmektedir. Örneğin
sıcaklık kelimesi; bulunulan mekana ve kişilere göre çok soğuk, soğuk, ılık, sıcak,
aşırı sıcak tanımlamalarından birini ifade edebilmektedir. Dolayısıyla bu düşünce
doğrultusunda aşağıdaki gibi bir bulanık küme şekli ortaya çıkmaktadır.
Şekil 2.33. Bulanık Küme
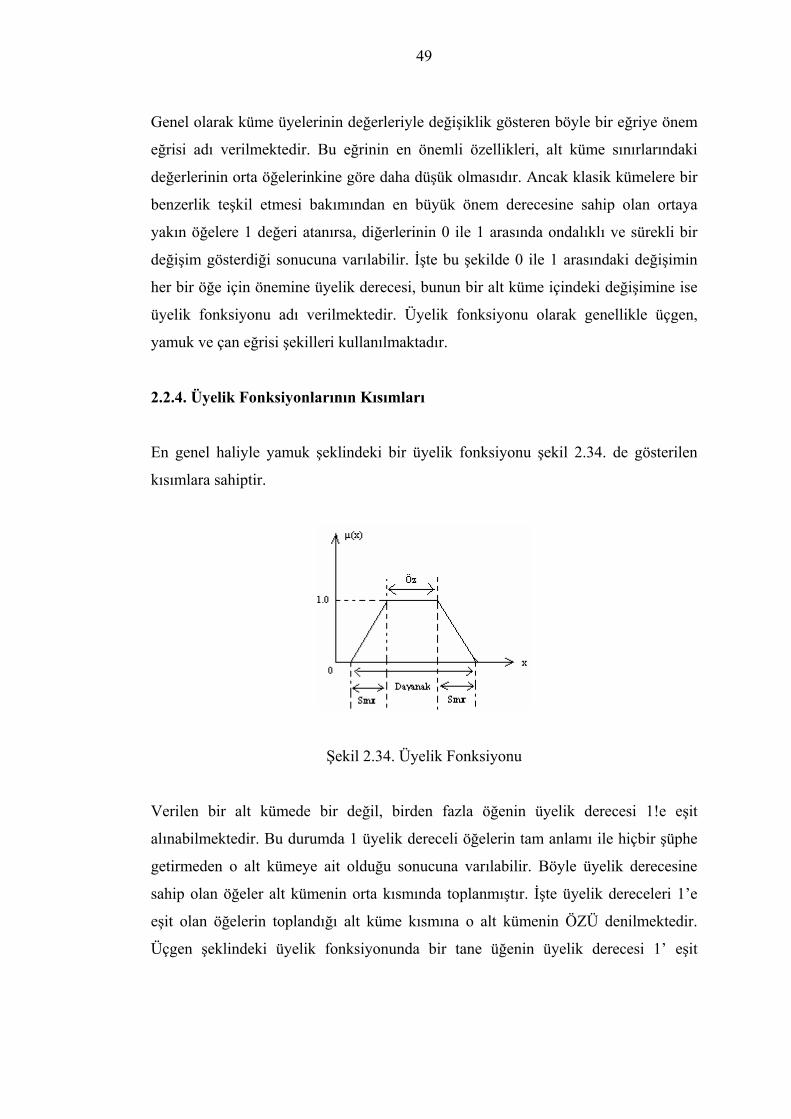
49
Genel olarak küme üyelerinin değerleriyle değişiklik gösteren böyle bir eğriye önem
eğrisi adı verilmektedir. Bu eğrinin en önemli özellikleri, alt küme sınırlarındaki
değerlerinin orta öğelerinkine göre daha düşük olmasıdır. Ancak klasik kümelere bir
benzerlik teşkil etmesi bakımından en büyük önem derecesine sahip olan ortaya
yakın öğelere 1 değeri atanırsa, diğerlerinin 0 ile 1 arasında ondalıklı ve sürekli bir
değişim gösterdiği sonucuna varılabilir. İşte bu şekilde 0 ile 1 arasındaki değişimin
her bir öğe için önemine üyelik derecesi, bunun bir alt küme içindeki değişimine ise
üyelik fonksiyonu adı verilmektedir. Üyelik fonksiyonu olarak genellikle üçgen,
yamuk ve çan eğrisi şekilleri kullanılmaktadır.
2.2.4. Üyelik Fonksiyonlarının Kısımları
En genel haliyle yamuk şeklindeki bir üyelik fonksiyonu şekil 2.34. de gösterilen
kısımlara sahiptir.
Şekil 2.34. Üyelik Fonksiyonu
Verilen bir alt kümede bir değil, birden fazla öğenin üyelik derecesi 1!e eşit
alınabilmektedir. Bu durumda 1 üyelik dereceli öğelerin tam anlamı ile hiçbir şüphe
getirmeden o alt kümeye ait olduğu sonucuna varılabilir. Böyle üyelik derecesine
sahip olan öğeler alt kümenin orta kısmında toplanmıştır. İşte üyelik dereceleri 1’e
eşit olan öğelerin toplandığı alt küme kısmına o alt kümenin ÖZÜ denilmektedir.
Üçgen şeklindeki üyelik fonksiyonunda bir tane üğenin üyelik derecesi 1’ eşit

50
olduğundan üçgen üyelik fonksiyonlarının özü bir nokta olarak karşımıza
çıkmaktadır.
Bir alt kümenin tüm öğelerini içeren aralığa o alt kümenin DAYANAĞI adı
verilmektedir. Burada bulunan her öğenin az veya çok değerde ( 0 ile 1 arasında )
üyelik dereceleri vardır.
Üyelik dereceleri 1’e ve 0’a eşit olmayan öğelerin oluşturduğu kısımlara, üyelik
fonksiyonunun sınırları veya geçiş bölgeleri adı verilmektedir. Bu öğeler alt kümenin
kısmi öğeleridir. Aslında bir alt kümeye bulanıklık özelliğinin takılması bu geçiş
yerlerinin bulunması ile olmaktadır. Genel olarak tüm üyelik fonksiyonlarında biri
sağda biri solda olmak üzere iki tane geçiş değeri bulunmaktadır.
Bu özelliklere ek olarak, üyelik fonksiyonlarının sahip olması gereken iki tane daha
özellik bulunmaktadır. Bunlardan birincisi; bulanık kümenin normal olup olmadığını
tespit etmemize yarayacak bir kavramdır. Buna göre normal bulanık kümede en
azından bir tane üyelik derecesi 1’e eşit olan öğe bulunmalıdır. Şekil 2.35. de bunun
şekil olarak örneği verilmiştir.
Şekil 2.35. Üyelik Derecelerinin Gösterimi
İkinci özellik ise, bulanık kümenin dış bükey olmasıdır. Dış bükey olan bulanık
kümelerde üyelik fonksiyonu kümenin dayanağı üzerinde ya sürekli artar yada
sürekli azalır. Veya önce sürekli üyelik derecesi bir öğede 1’e eşit oluncaya kadar
artar ondan sonraki dayanağa düşen öğeler için sürekli azalır.

51
Şekil 2.36. Bulanık Kümeler, (a) Dış Bükey, (b) Dış Bükey Olmayan
Bulanık kümelerin üyelik fonksiyonlarında üyelik derecesinin 0.5’e eşit olduğu
noktaya geçiş noktası denilmektedir.
2.2.5. BULANIK DENETİM SİSTEMİ
Bulanık denetim sistemlerinin iş prensibi, insanın düşünme tarzı temel alınarak
tasarlanmaktadır. Bulanık denetleyiciler genellikle matematiksel modeli bilinmeyen
veya doğrusal matematiksel değeri kurulamayan sistemlerde oldukça etliki
olmaktadır. Bulanık denetleme üç aşamada yapılmaktadır.
• Bulanıklaştırma
• Bulanık Sonuçlandırma
• Durulaştırma
Bu sistemlerin çalışma şekli 2.37.de gösterildiği gibi olmaktadır.

52
DenetlenenSistem
Parametresi
Bulanıklaştırıcı Bulanık Çıkarım Durulaştırıcı
Parametrelerin Düzenlenmesi
Koşullar
e(k) de(k)
µd
µde
µdU
dU(k)
Şekil 2.37. Bulanık Denetleyicinin Genel Yapısı
Önce denetlenmesi gereken modelin parametreleri ölçülür. Sonra şekilden de
görüldüğü gibi, kesin olan giriş değerleri bulanıklaştırma işlemi sonucu bulanık
biçimde ifade edilir. Bulanık kuralları sağlayan bilgi tabanı, denetlenen sistemin
ayarlanması için gerekli bulanık değerleri çıkarır. Daha sonra bulanık sonuç değeri,
durulama yöntemlerinden biri ile kesinleştirilir ve sistemin ayarlanması yapılır.
2.2.5.1. Bulanıklaştırma
Klasik küme şeklinde beliren değişim aralıklarının bulanıklaştırılması, bulanık küme,
mantık ve sistem için gerekmektedir. Bunu için bir aralıkta bulunabilecek öğelerin
hepsinin 1 üyelik derecesine sahip olacak yerde, 0 ile 1 arasında değişik değerlere
sahip olması düşünülmektedir. Bu yüzden bazı öğelerin belirsizlik içerdikleri kabul
edilmektedir. Bu belirsizliğin sayısal olmayan durumlardan kaynaklanması halinde
bulanıklıktan söz edilebilir.

53
2.2.5.2. BULANIK ÇIKARIM ( BULANIK KURALLAR )
Makineler tarafından bilgi işlemlerinin algılanma yolu olan yapay zeka alanında bilgi
işlemi, tıpkı insan dilindeki gibi bir ifade ile temsil edilebilmektedir. Bu en yaygın
olarak kullanılan insan bilgisini işleme yoludur. Böyle bir ifadede EĞER-İSE ( IF-
THEN ) kelimeleri ile ayrılmış olan iki kısım bulunmaktadır. EĞER ile İSE
kelimeleri arasında bulunan kısma öncül veya ön şartlar, İSE kelimesinden sonraki
kısma ise soncul veya çıkarım denilmektedir. İşte bu tür yapısı olan ifadelere
‘EĞER-İSE kural tabanlı’ biçim adı verilmektedir. Bu ifade bilinen bazı bilgilerin
kullanılması ile bunların ışığı altında faydalı olan diğer bazı bilgilerin çıkarılması
anlamına gelmektedir.
2.2.5.3. DURULAŞTIRMA
Bulanık denetlemenin son işlemi ise, uygulanacak olan kontrol işaretlerinin
normalize edilmiş değerlerinin saptanmasıdır. Bu işlem durulama ( defuzzification )
bloğu yardımı ile gerçekleştirilmektedir. Durulama, bulanıklaştırıcının aksine bulanık
niceliği kesin niceliğe dönüştürme işlemidir. Bulanık sürecin çıkışı iki veya daha
fazla üyelik fonksiyonunun mantıksal birleşimidir. Durulama ile ilgili farklı
yöntemler bulunmaktadır. Bu yöntemler, genellikle üyelik fonksiyonlarının
birleşiminin ağırlığının hesaplanmasına dayalıdır. Belli başlı bazı durulama
yöntemleri şunlardır.
• Maksimum Üyelik İlkesi ( Mx-Membership Principle )
• Ağırlık Merkezi Yöntemi ( COA-Center Of Area )
• Ağırlıklı Ortalama Yöntemi ( Weighted Average Method )
• Ortalama Maksimum Üyelik Yöntemi ( Mean Max Membership )
Bulanık mantığa dayalı olarak denetimi gerçekleştirilen sistemler günümüzde çok
geniş uygulama alanları içermektedir. Bunlara örnek olarak otomatik çamaşır
makinesi, mikro dalga fırın, şöförsüz araba uygulamaları, uçak iniş kontrol sistemleri
gibi. Şekil 2.38. de sinirsel bulanık kontrol sisteminin işlem adımları algoritma
şeklinde verilmiştir.

54
Bulanıklaştırma(üyelik fonksiyonu
değerlerininüretildiği yapay
sinir ağları)
Kuralar tablosundaüyelik
derecellerine görekuralların
belirlenmesi
Kural tablosundanfaydalanarak çıkış
değerlerinindeğerlendirilmesi
Durulama(Bulanıklıktan
kurtarma)
İstenilendeğerler eldeedilmiş mi?
Ayarlanmış sonçıkış değerleri
Uygun üyelikfonksiyonlarınınüretilmesi için
ağırlık değerlerinindeğiştirilmesi
EH
Giriş
Şekil 2.38. Sinirsel Bulanık Kontrol Sisteminin İşlem Adımları

55
3. ARAŞTIRMA VE BULGULAR
3.1. Yük ve Kaynak Gerilimine Bağlı Olarak Yayılım Gecikmesinin Bulunması
Yük ve kaynak geriliminin değişmesi yayılım gecikmesini değiştirmektedir. Yayılım
gecikmesinin elektronik devrelerde en az olması istenmektedir. En ideal yayılım
gecikmesini bulmak için, hazırlanan devrelerde kapasitif yük ve kaynak geriliminin
bir çok değeri için similasyon ve ölçüm yapmak gerekmektedir. Bu ise zaman
kaybına neden olmaktadır. Bu zaman kaybını önlemek için bu değerleri doğruya
yakın bir şekilde tahmin eden algoritmalar geliştirilmektedir. Burada Matlab
programının Fuzzy logic toolbax ı kullanılmıştır.
Şekil 3.1. Fuzzy Logic Fis Editörü
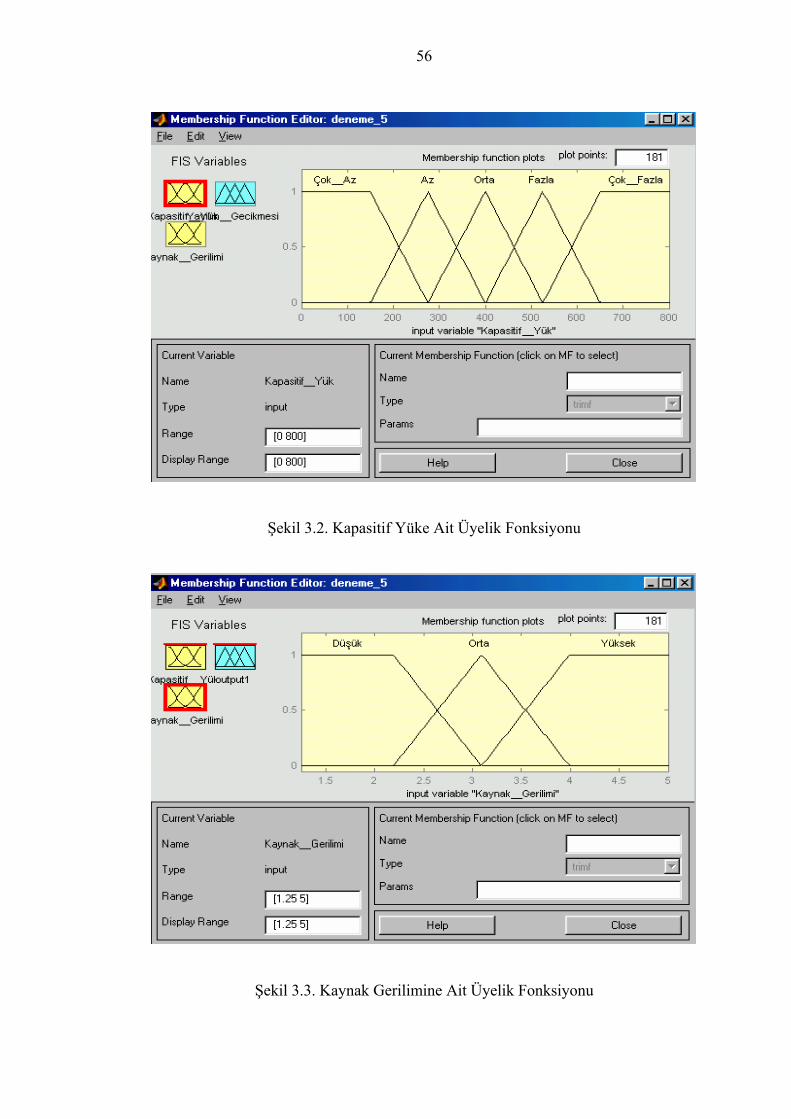
56
Şekil 3.2. Kapasitif Yüke Ait Üyelik Fonksiyonu
Şekil 3.3. Kaynak Gerilimine Ait Üyelik Fonksiyonu

57
Şekil 3.4. Yayılım Gecikmesine ait Üyelik Fonksiyonu
Şekil 3.5. Kurallar

58
Şekil 3.6. Giriş Değişkenlerine Göre Çıkış Değerinin Değişimi
Şekil 3.7. Giriş Değişkenlerine Bağlı Olarak Çıkışın Üç Boyutlu Değişimi

59
Matlab Fuzzy Logic ToolBox ında, şekil 3.6. daki kısımda kontrol çubukları sağa ve
sola hareket ettirilerek yayılım gecikmesinin nasıl değiştiği görülmektedir. Ayrıca
şekil 3.7. den de yüke ve kaynak gerilimine bağlı olarak yayılım gecikmesinin
değişimi görülebilmektedir. Bu program ve uygulama sayesinde en ideal yayılım
gecikmesini bulmak için bir çok similasyon ve ölçüm yapmaya gerek kalmamaktadır.
Bu da büyük elektronik devreler düşünüldüğünde ciddi bir zaman kazanımı anlamına
gelmektedir.
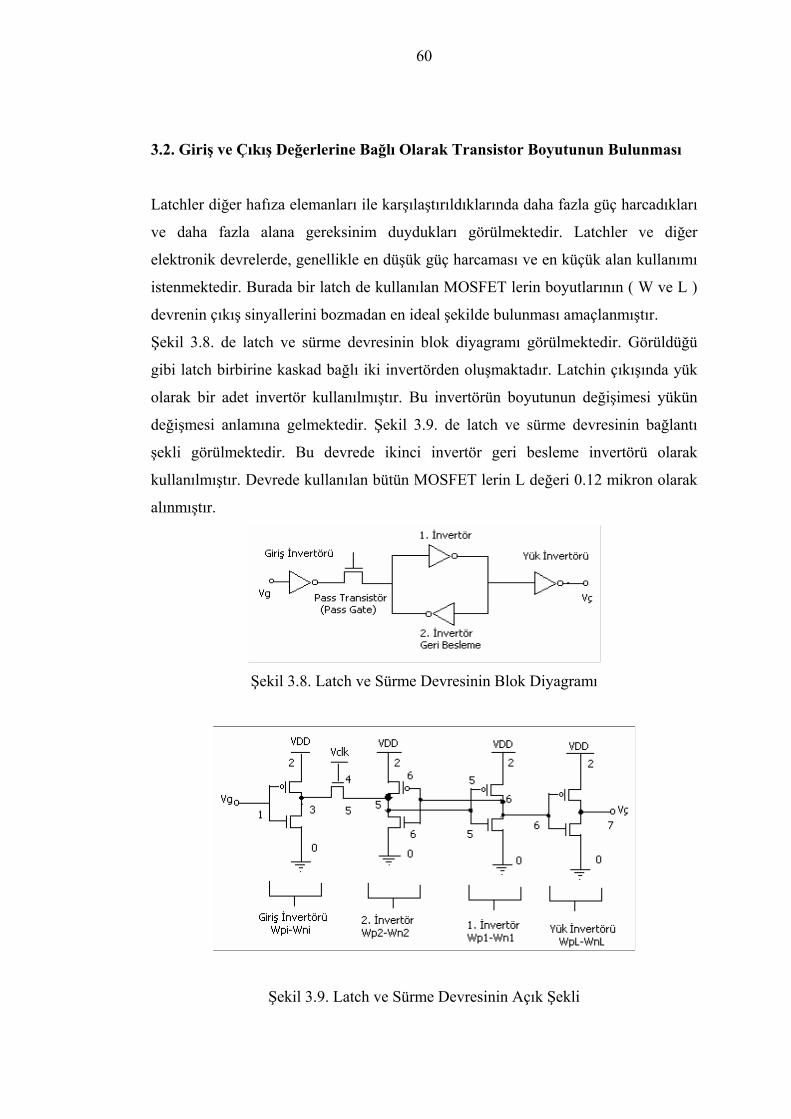
60
3.2. Giriş ve Çıkış Değerlerine Bağlı Olarak Transistor Boyutunun Bulunması
Latchler diğer hafıza elemanları ile karşılaştırıldıklarında daha fazla güç harcadıkları
ve daha fazla alana gereksinim duydukları görülmektedir. Latchler ve diğer
elektronik devrelerde, genellikle en düşük güç harcaması ve en küçük alan kullanımı
istenmektedir. Burada bir latch de kullanılan MOSFET lerin boyutlarının ( W ve L )
devrenin çıkış sinyallerini bozmadan en ideal şekilde bulunması amaçlanmıştır.
Şekil 3.8. de latch ve sürme devresinin blok diyagramı görülmektedir. Görüldüğü
gibi latch birbirine kaskad bağlı iki invertörden oluşmaktadır. Latchin çıkışında yük
olarak bir adet invertör kullanılmıştır. Bu invertörün boyutunun değişimesi yükün
değişmesi anlamına gelmektedir. Şekil 3.9. de latch ve sürme devresinin bağlantı
şekli görülmektedir. Bu devrede ikinci invertör geri besleme invertörü olarak
kullanılmıştır. Devrede kullanılan bütün MOSFET lerin L değeri 0.12 mikron olarak
alınmıştır.
Şekil 3.8. Latch ve Sürme Devresinin Blok Diyagramı
Şekil 3.9. Latch ve Sürme Devresinin Açık Şekli

61
Şekil 3.9. deki devrenin similasyonu PSPICE programında yapılmıştır. Bu devreye
ait program aşağıda verilmiştir. Verilen bu program 300 den fazla yapılan
similasyondan sadece bir tanesidir. Derede 1.2 V luk kaynak kullanılmıştır ve
devrenin frekansı mümkün olduğunca yüksek tutulmuştur. Bunun amacı devrenin
daha hızlı çalışmasını sağlamaktır. Çünkü elektronik devrelerde, devrenin hızı da
önemli bir faktördür.
latch
Vin 1 0 PULSE (0V 1.2V 0.1NS 0NS 0NS 0.8NS 4NS) ;giris
Vclk 4 0 PULSE (0V 1.2V 0.2NS 0NS 0NS 0.6NS 2NS)
Vdd 2 0 DC 1.2V
.MODEL CMOSN NMOS ( LEVEL = 7
MP1 3 1 2 2 CMOSP W=4U L=0.12U PD=4U PS=4U
MN1 3 1 0 0 CMOSN W=2U L=0.12U PD=2U PS=2U
Min 3 4 5 0 CMOSN W=10U L=0.12U PD=10U PS=10U
MP2 5 6 2 2 CMOSP W=2U L=0.12U PD=2U PS=2U
MN2 5 6 0 0 CMOSN W=1U L=0.12U PD=1U PS=1U
MP3 6 5 2 2 CMOSP W=2U L=0.12U PD=2U PS=2U
MN3 6 5 0 0 CMOSN W=1U L=0.12U PD=1U PS=1U
MP4 7 6 2 2 CMOSP W=2U L=0.12U PD=2U PS=2U
MN4 7 6 0 0 CMOSN W=1U L=0.12U PD=1U PS=1U
.TRAN 0.000000000001NS 8NS
.PROBE
.OP
.END

62
Time
0s 2.0ns 4.0ns 6.0ns 8.0nsV(7)
-2.0V
0V
2.0VV(4)
0V
2.0V
SEL>>
V(1)0V
1.0V
2.0V
Şekil 3.10 Giriş, Çıkış ve Clock Sinyalleri
Şekil 3.10. de devreye uygulanan giriş sinyali ( V(1) ) ve clock sinyali ( V(4) ) ile
bunlara bağlı olarak oluşan çıkış sinyali ( V(7) ) gösterilmiştir.
Burada öncelikle yük invertörünün boyutlarının değişimi 1. invertörün boyutlarını
nasıl değiştiriyor o incelenmiştir. Bu amaçla giriş invertörü ( Wpi=4u Lpi=0.12u,
Wni=2u Lni=0.12u ) ve 2. invertörün ( Geri besleme invertörü ) boyutları sabit
tutulmuştur. Boyutların değişimini inceleyebilmek için çıkış sinyalindeki yayılım
gecikmesi göz önünde bulundurulmuştur. Alınan similosyon sonuçlarına göre yük
invertörünün boyutlarının artması 1. invertörün boyutlarının artmasına sebep
olmaktadır. Ama giriş invertörü ve 2. invertörün değerleri sabit tutulduğundan ve
aradaki düzenin bozulmasından, 1. invertörün boyutunun artması her zaman yayılım
gecikmesini azaltmamıştır. Ancak yük arttıkça 1. invertörün boyutlarının artacağı
çizelgelerde açıkça görülebilmektedir.
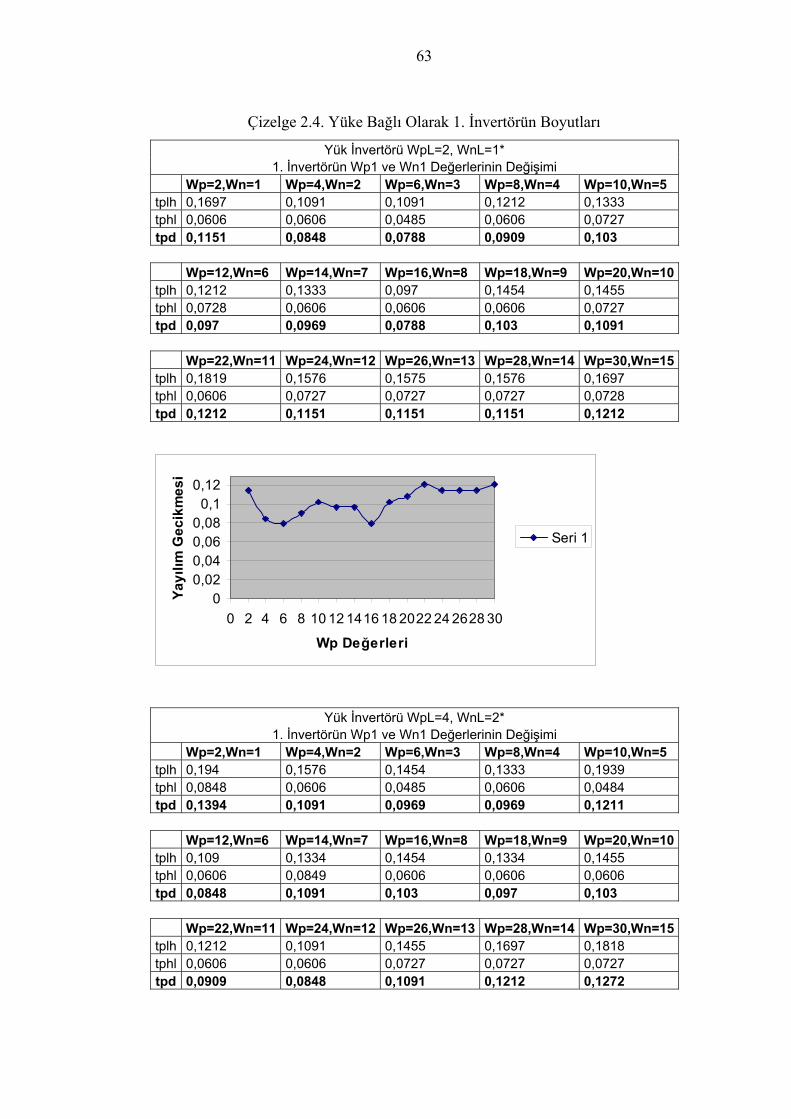
63
Çizelge 2.4. Yüke Bağlı Olarak 1. İnvertörün Boyutları
Yük İnvertörü WpL=2, WnL=1* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,1697 0,1091 0,1091 0,1212 0,1333 tphl 0,0606 0,0606 0,0485 0,0606 0,0727 tpd 0,1151 0,0848 0,0788 0,0909 0,103 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1212 0,1333 0,097 0,1454 0,1455 tphl 0,0728 0,0606 0,0606 0,0606 0,0727 tpd 0,097 0,0969 0,0788 0,103 0,1091 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1819 0,1576 0,1575 0,1576 0,1697 tphl 0,0606 0,0727 0,0727 0,0727 0,0728 tpd 0,1212 0,1151 0,1151 0,1151 0,1212
00,020,040,060,08
0,10,12
0 2 4 6 8 10 12 1416 18 2022 24 2628 30
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
Yük İnvertörü WpL=4, WnL=2* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,194 0,1576 0,1454 0,1333 0,1939 tphl 0,0848 0,0606 0,0485 0,0606 0,0484 tpd 0,1394 0,1091 0,0969 0,0969 0,1211 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,109 0,1334 0,1454 0,1334 0,1455 tphl 0,0606 0,0849 0,0606 0,0606 0,0606 tpd 0,0848 0,1091 0,103 0,097 0,103 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1212 0,1091 0,1455 0,1697 0,1818 tphl 0,0606 0,0606 0,0727 0,0727 0,0727 tpd 0,0909 0,0848 0,1091 0,1212 0,1272

64
00,020,040,060,080,1
0,120,14
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
YÜk İnvertörü WpL=6, WnL=3* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,2424 0,1212 0,133 0,1454 0,1818 tphl 0,1333 0,0727 0,0728 0,0849 0,0849 tpd 0,1878 0,0969 0,103 0,1151 0,1333 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1212 0,1333 0,1333 0,1212 0,1575 tphl 0,0606 0,0727 0,0727 0,0727 0,0606 tpd 0,0909 0,103 0,103 0,0969 0,1091 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1575 0,1697 0,1697 0,1576 0,1697 tphl 0,0606 0,0727 0,0727 0,0849 0,0727 tpd 0,1091 0,1212 0,1212 0,1212 0,1212
0
0,05
0,1
0,15
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1

65
YÜk İnvertörü WpL=8, WnL=4* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,1697 0,097 0,1697 0,1939 0,1333 tphl 0,0727 0,0727 0,0727 0,0606 0,0727 tpd 0,1212 0,0848 0,1212 0,1272 0,103 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1819 0,1819 0,1313 0,1157 0,1334 tphl 0,0727 0,0727 0,0606 0,0727 0,0727 tpd 0,1273 0,1273 0,0969 0,0942 0,103 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1334 0,1455 0,1697 0,1333 0,1455 tphl 0,0545 0,0848 0,0848 0,1091 0,0728 tpd 0,0939 0,1151 0,1272 0,1212 0,1091
00,020,040,060,08
0,10,120,14
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
YÜk İnvertörü WpL=10, WnL=5* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,3273 0,1759 0,1212 0,1334 0,1818 tphl 0,1212 0,0848 0,0485 0,0727 0,0727 tpd 0,2243 0,1303 0,0848 0,103 0,1272 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1576 0,1576 0,1454 0,1212 0,1818 tphl 0,0485 0,0727 0,0727 0,0727 0,0848 tpd 0,103 0,1151 0,109 0,0969 0,1333 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1939 0,1576 0,1455 0,1576 0,1334 tphl 0,0485 0,0606 0,0606 0,0727 0,0484 tpd 0,1212 0,1091 0,103 0,1151 0,0909

66
0
0,05
0,1
0,15
0,2
0,25
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
YÜk İnvertörü WpL=12, WnL=6* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,1939 0,2545 0,1697 0,1455 0,194 tphl 0,1051 0,0848 0,0969 0,0848 0,1091 tpd 0,1515 0,1696 0,1333 0,1151 0,1515 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1455 0,1697 0,1334 0,1334 0,194 tphl 0,0848 0,0727 0,0727 0,0727 0,485 tpd 0,1151 0,1212 0,103 0,103 0,1212 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,14455 0,1455 0,1455 0,1818 0,2182 tphl 0,0848 0,0848 0,0727 0,0484 0,0606 tpd 0,1151 0,1151 0,1091 0,1151 0,1394
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
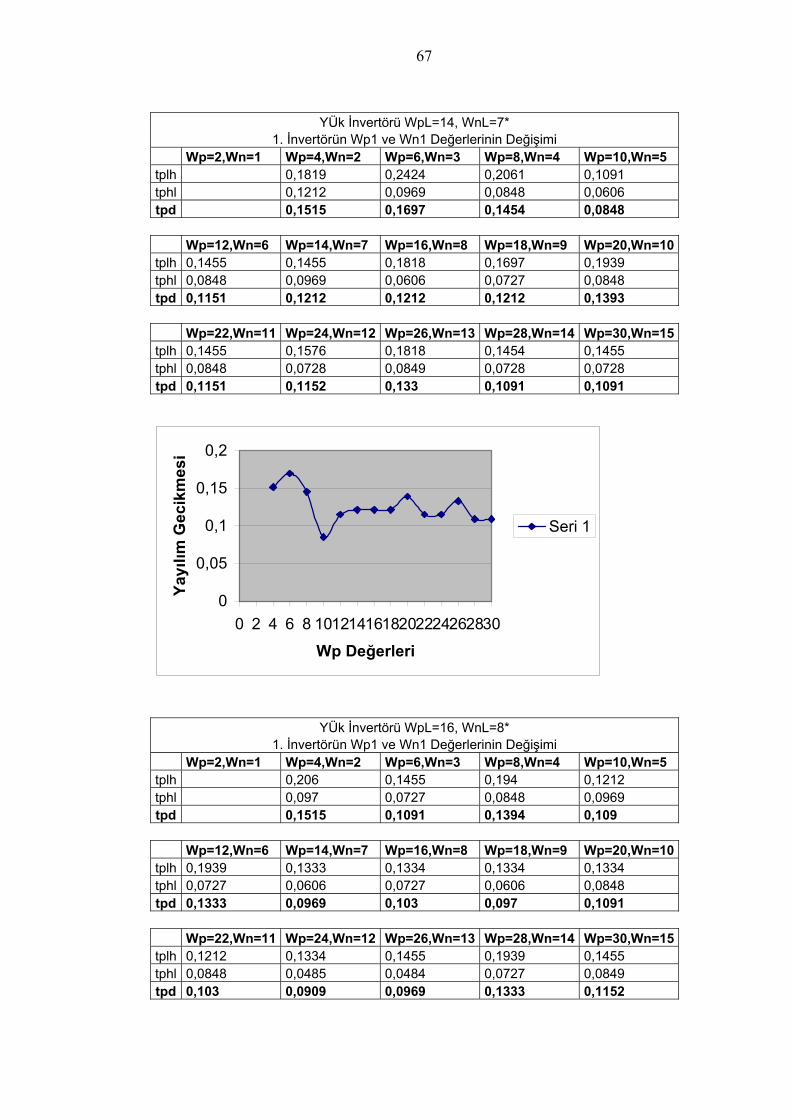
67
YÜk İnvertörü WpL=14, WnL=7* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,1819 0,2424 0,2061 0,1091 tphl 0,1212 0,0969 0,0848 0,0606 tpd 0,1515 0,1697 0,1454 0,0848 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1455 0,1455 0,1818 0,1697 0,1939 tphl 0,0848 0,0969 0,0606 0,0727 0,0848 tpd 0,1151 0,1212 0,1212 0,1212 0,1393 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1455 0,1576 0,1818 0,1454 0,1455 tphl 0,0848 0,0728 0,0849 0,0728 0,0728 tpd 0,1151 0,1152 0,133 0,1091 0,1091
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
YÜk İnvertörü WpL=16, WnL=8* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,206 0,1455 0,194 0,1212 tphl 0,097 0,0727 0,0848 0,0969 tpd 0,1515 0,1091 0,1394 0,109 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1939 0,1333 0,1334 0,1334 0,1334 tphl 0,0727 0,0606 0,0727 0,0606 0,0848 tpd 0,1333 0,0969 0,103 0,097 0,1091 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1212 0,1334 0,1455 0,1939 0,1455 tphl 0,0848 0,0485 0,0484 0,0727 0,0849 tpd 0,103 0,0909 0,0969 0,1333 0,1152

68
00,020,040,060,080,1
0,120,140,16
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
YÜk İnvertörü WpL=20, WnL=10* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,1818 0,1575 0,1818 0,1455 tphl 0,097 0,0848 0,0848 0,0848 tpd 0,1394 0,1211 0,1333 0,1151 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1818 0,1107 0,1697 0,1575 0,1818 tphl 0,0606 0,0727 0,0727 0,0969 0,0848 tpd 0,1212 0,0917 0,1212 0,1272 0,1364 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1576 0,1334 0,1213 0,1333 0,1454 tphl 0,0848 0,0848 0,0606 0,0727 0,0727 tpd 0,1212 0,1091 0,0909 0,103 0,109
00,020,040,060,080,1
0,120,140,16
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
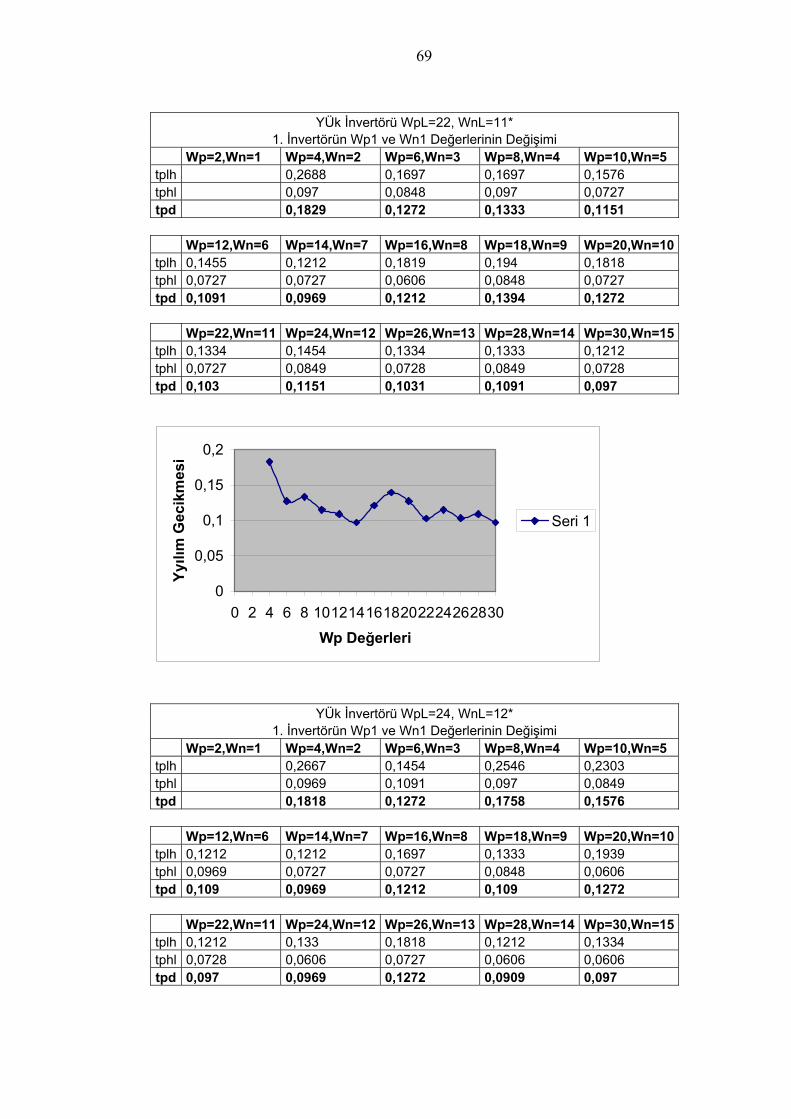
69
YÜk İnvertörü WpL=22, WnL=11* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,2688 0,1697 0,1697 0,1576 tphl 0,097 0,0848 0,097 0,0727 tpd 0,1829 0,1272 0,1333 0,1151 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1455 0,1212 0,1819 0,194 0,1818 tphl 0,0727 0,0727 0,0606 0,0848 0,0727 tpd 0,1091 0,0969 0,1212 0,1394 0,1272 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1334 0,1454 0,1334 0,1333 0,1212 tphl 0,0727 0,0849 0,0728 0,0849 0,0728 tpd 0,103 0,1151 0,1031 0,1091 0,097
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yyılı
m G
ecik
mes
i
Seri 1
YÜk İnvertörü WpL=24, WnL=12* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh 0,2667 0,1454 0,2546 0,2303 tphl 0,0969 0,1091 0,097 0,0849 tpd 0,1818 0,1272 0,1758 0,1576 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1212 0,1212 0,1697 0,1333 0,1939 tphl 0,0969 0,0727 0,0727 0,0848 0,0606 tpd 0,109 0,0969 0,1212 0,109 0,1272 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1212 0,133 0,1818 0,1212 0,1334 tphl 0,0728 0,0606 0,0727 0,0606 0,0606 tpd 0,097 0,0969 0,1272 0,0909 0,097

70
0
0,05
0,1
0,15
0,2
0 2 4 6 8 10 12 1416 18 20 22 24 26 28 30
Wp Değerleri
Yayı
lım G
ecik
mes
i
Seri 1
YÜk İnvertörü WpL=26, WnL=13* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh Çıkış Yok Çıkış Yok 0,2667 0,1575 0,1939 tphl Çıkış Yok Çıkış Yok 0,097 0,0848 0,0849 tpd Çıkış Yok Çıkış Yok 0,1818 0,1211 0,1394 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1334 0,1212 0,1939 0,1212 0,1212 tphl 0,0848 0,0727 0,0727 0,0727 0,097 tpd 0,1091 0,0969 0,1333 0,0969 0,1091 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1939 0,1939 0,1091 0,1714 0,1212 tphl 0,0848 0,0849 0,0484 0,0484 0,0727 tpd 0,1393 0,1394 0,0787 0,1281 0,0969
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1

71
YÜk İnvertörü WpL=28, WnL=14* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh Çıkış Yok Çıkış Yok 0,2182 0,206 0,1334 tphl Çıkış Yok Çıkış Yok 0,097 0,0848 0,0848 tpd Çıkış Yok Çıkış Yok 0,1576 0,1454 0,1091 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,1212 0,1212 0,2061 0,206 0,194 tphl 0,0849 0,0727 0,0606 0,097 0,097 tpd 0,103 0,0969 0,1333 0,1515 0,1455 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1576 0,1576 0,1576 0,2061 0,1697 tphl 0,0728 0,0848 0,0606 0,0848 0,0727 tpd 0,1152 0,1212 0,1091 0,1455 0,1212
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
YÜk İnvertörü WpL=30, WnL=15* 1. İnvertörün Wp1 ve Wn1 Değerlerinin Değişimi
Wp=2,Wn=1 Wp=4,Wn=2 Wp=6,Wn=3 Wp=8,Wn=4 Wp=10,Wn=5 tplh Çıkış Yok Çıkış Yok 0,2666 0,1697 0,194 tphl Çıkış Yok Çıkış Yok 0,097 0,097 0,0849 tpd Çıkış yok Çıkış yok 0,1818 0,133 0,1394 Wp=12,Wn=6 Wp=14,Wn=7 Wp=16,Wn=8 Wp=18,Wn=9 Wp=20,Wn=10tplh 0,2425 0,1213 0,1334 0,1939 0,1697 tphl 0,0849 0,0727 0,0606 0,0606 0,0849 tpd 0,1636 0,097 0,097 0,1272 0,1273 Wp=22,Wn=11 Wp=24,Wn=12 Wp=26,Wn=13 Wp=28,Wn=14 Wp=30,Wn=15tplh 0,1697 0,1212 0,1697 0,1576 0,1455 tphl 0,0727 0,0849 0,0727 0,0727 0,0727 tpd 0,1212 0,103 0,1212 0,1151 0,1091

72
0
0,05
0,1
0,15
0,2
0 2 4 6 8 1012141618202224262830
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Çizelge 2.4. de yük invertörünün boyutunun artmasına bağlı olarak, 1. invertörün
boyutunun nasıl değiştiği ve bu değişimlerin yayılım gecikmesine etkisi verilmiştir.
Yük invertörünün boyutları WpL=2 U ( mikron ), WnL=1 U ( mikron ) değerinden
başlayarak WpL değeri 2 mikron, WnL değeri de 1 mikron arttırılmıştır. Bu arada
her bir yük invertörü değeri için 1. invertörün boyutları da Wp1=2 U , Wn1=1U
değerlerinden başlamak üzere Wp1 değeri 2U, Wn1 değeri 1U arttırılarak her bir
değer için yayılım gecikmeleri ölçülmüştür. Alınan bu değerler MICROSOFT
EXCEL de grafik haline getirilmiş ve her bir invertör değerine ait bilgiler çizelgenin
altında verilmiştir.
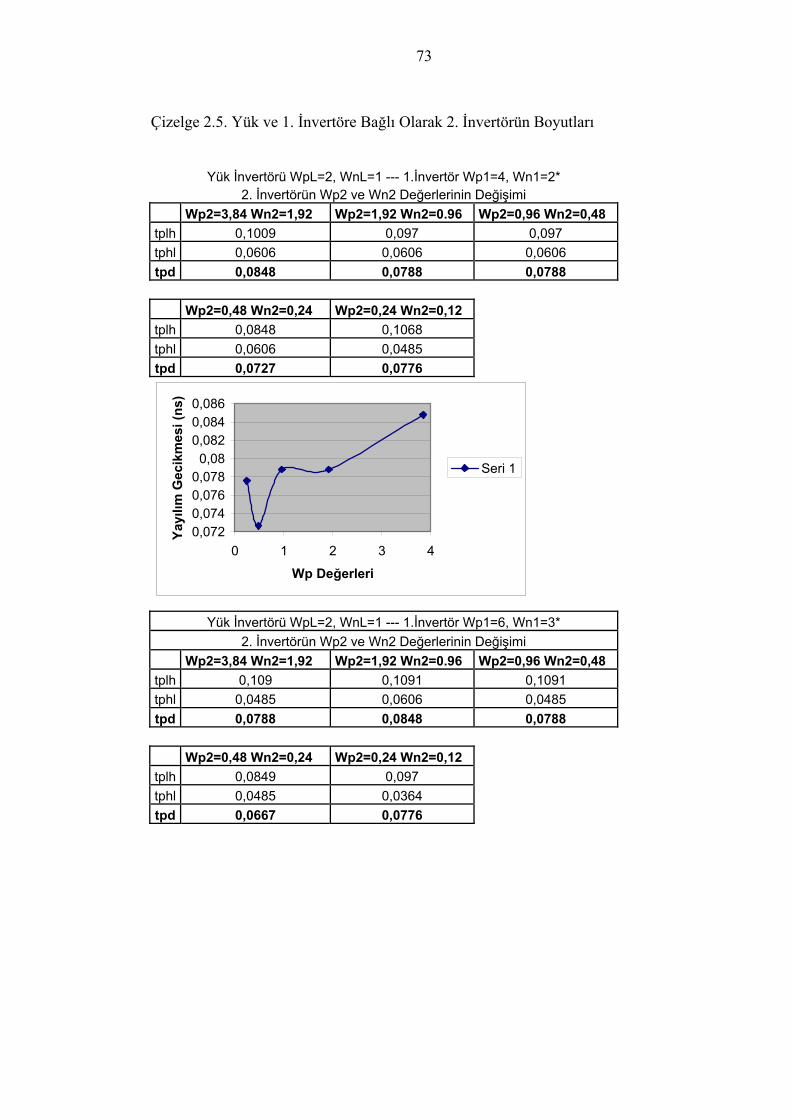
73
Çizelge 2.5. Yük ve 1. İnvertöre Bağlı Olarak 2. İnvertörün Boyutları
Yük İnvertörü WpL=2, WnL=1 --- 1.İnvertör Wp1=4, Wn1=2* 2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi
Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1009 0,097 0,097 tphl 0,0606 0,0606 0,0606 tpd 0,0848 0,0788 0,0788 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,0848 0,1068 tphl 0,0606 0,0485 tpd 0,0727 0,0776
0,0720,0740,0760,0780,08
0,0820,0840,086
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Yük İnvertörü WpL=2, WnL=1 --- 1.İnvertör Wp1=6, Wn1=3*
2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,109 0,1091 0,1091 tphl 0,0485 0,0606 0,0485 tpd 0,0788 0,0848 0,0788 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,0849 0,097 tphl 0,0485 0,0364 tpd 0,0667 0,0776

74
0
0,02
0,04
0,06
0,08
0,1
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)Seri 1
Yük İnvertörü WpL=4, WnL=2 --- 1.İnvertör Wp1=4, Wn1=2* 2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi
Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1576 0,1334 0,1212 tphl 0,0606 0,0484 0,0606 tpd 0,1091 0,0909 0,0909 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1091 0,1454 tphl 0,0606 0,0606 tpd 0,0848 0,103
00,020,040,060,080,1
0,12
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Yük İnvertörü WpL=4, WnL=2 --- 1.İnvertör Wp1=6, Wn1=3*
2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1454 0,1455 0,0969 tphl 0,0485 0,0728 0,0485 tpd 0,0969 0,1091 0,0727 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,097 0,1057 tphl 0,0606 0,0606 tpd 0,0788 0,0831
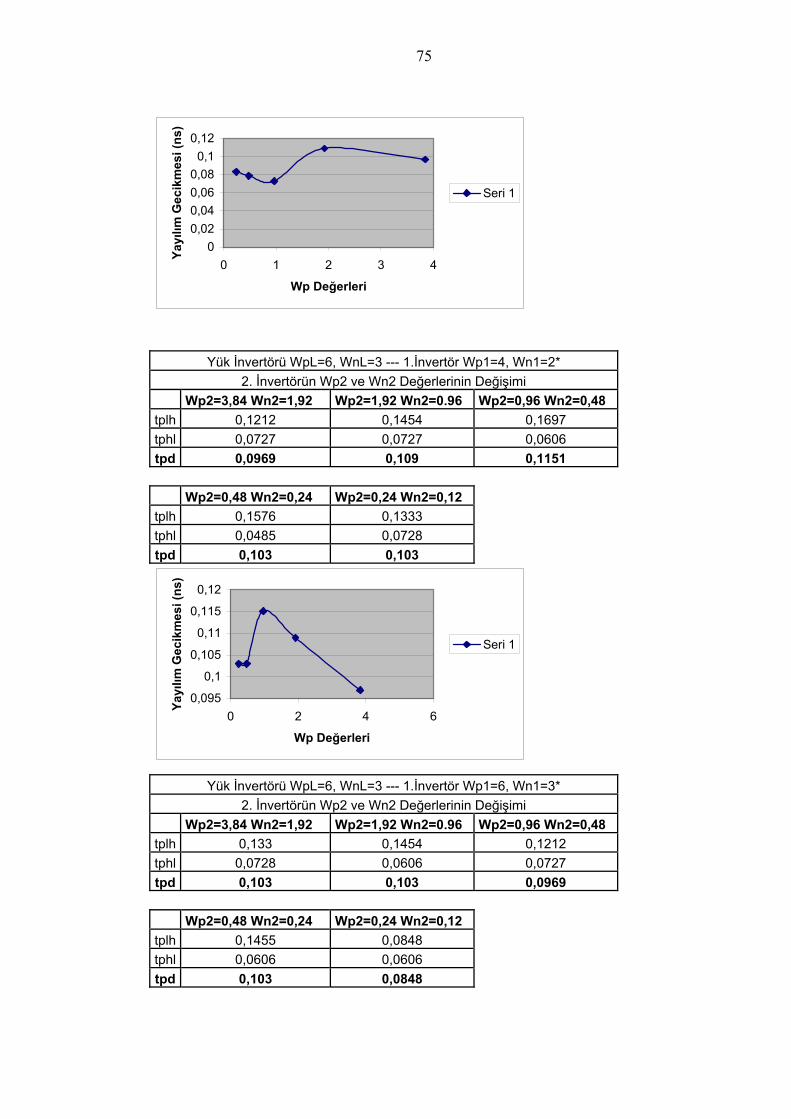
75
00,020,040,060,08
0,10,12
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)Seri 1
Yük İnvertörü WpL=6, WnL=3 --- 1.İnvertör Wp1=4, Wn1=2* 2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi
Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1212 0,1454 0,1697 tphl 0,0727 0,0727 0,0606 tpd 0,0969 0,109 0,1151 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1576 0,1333 tphl 0,0485 0,0728 tpd 0,103 0,103
0,095
0,1
0,105
0,11
0,115
0,12
0 2 4 6
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Yük İnvertörü WpL=6, WnL=3 --- 1.İnvertör Wp1=6, Wn1=3*
2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,133 0,1454 0,1212 tphl 0,0728 0,0606 0,0727 tpd 0,103 0,103 0,0969 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1455 0,0848 tphl 0,0606 0,0606 tpd 0,103 0,0848

76
00,020,040,060,08
0,10,12
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)Seri 1
Yük İnvertörü WpL=8, WnL=4 --- 1.İnvertör Wp1=4, Wn1=2* 2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi
Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1454 0,1697 0,1454 tphl 0,0848 0,0848 0,0727 tpd 0,1151 0,1272 0,109 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1696 0,1576 tphl 0,0727 0,0728 tpd 0,1211 0,1152
0,105
0,11
0,115
0,12
0,125
0,13
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Yük İnvertörü WpL=8, WnL=4 --- 1.İnvertör Wp1=6, Wn1=3*
2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1697 0,1454 0,1455 tphl 0,0727 0,0728 0,0484 tpd 0,1212 0,1091 0,0969 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1054 0,1334 tphl 0,0606 0,0727 tpd 0,0857 0,103

77
00,020,040,060,080,1
0,120,14
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)Seri 1
Yük İnvertörü WpL=10, WnL=5 --- 1.İnvertör Wp1=4, Wn1=2* 2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi
Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,2061 0,1697 0,1697 tphl 0,0848 0,0848 0,0727 tpd 0,1527 0,1272 0,1212 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,1576 0,1575 tphl 0,0848 0,0606 tpd 0,1212 0,109
0
0,05
0,1
0,15
0,2
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)
Seri 1
Yük İnvertörü WpL=10, WnL=5 --- 1.İnvertör Wp1=6, Wn1=3*
2. İnvertörün Wp2 ve Wn2 Değerlerinin Değişimi Wp2=3,84 Wn2=1,92 Wp2=1,92 Wn2=0.96 Wp2=0,96 Wn2=0,48 tplh 0,1333 0,1818 0,1575 tphl 0,0485 0,0848 0,0606 tpd 0,0909 0,1333 0,109 Wp2=0,48 Wn2=0,24 Wp2=0,24 Wn2=0,12 tplh 0,097 0,1575 tphl 0,0606 0,0606 tpd 0,0788 0,109
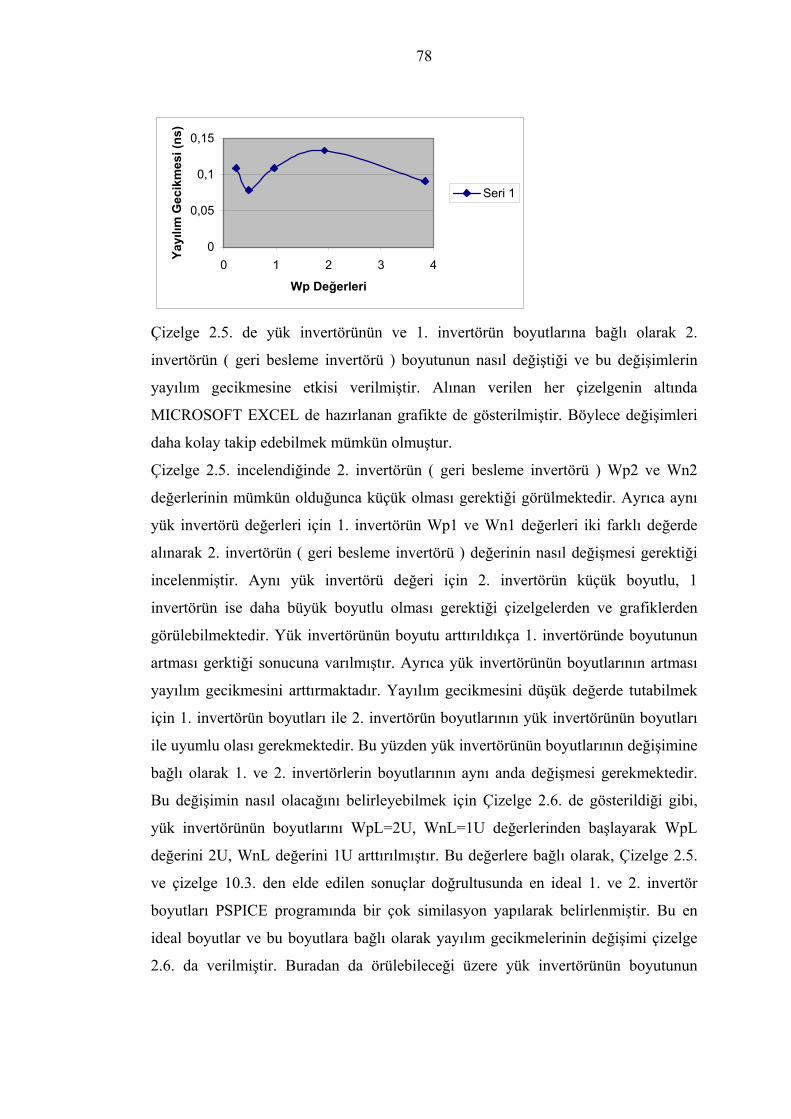
78
0
0,05
0,1
0,15
0 1 2 3 4
Wp Değerleri
Yayı
lım G
ecik
mes
i (ns
)Seri 1
Çizelge 2.5. de yük invertörünün ve 1. invertörün boyutlarına bağlı olarak 2.
invertörün ( geri besleme invertörü ) boyutunun nasıl değiştiği ve bu değişimlerin
yayılım gecikmesine etkisi verilmiştir. Alınan verilen her çizelgenin altında
MICROSOFT EXCEL de hazırlanan grafikte de gösterilmiştir. Böylece değişimleri
daha kolay takip edebilmek mümkün olmuştur.
Çizelge 2.5. incelendiğinde 2. invertörün ( geri besleme invertörü ) Wp2 ve Wn2
değerlerinin mümkün olduğunca küçük olması gerektiği görülmektedir. Ayrıca aynı
yük invertörü değerleri için 1. invertörün Wp1 ve Wn1 değerleri iki farklı değerde
alınarak 2. invertörün ( geri besleme invertörü ) değerinin nasıl değişmesi gerektiği
incelenmiştir. Aynı yük invertörü değeri için 2. invertörün küçük boyutlu, 1
invertörün ise daha büyük boyutlu olması gerektiği çizelgelerden ve grafiklerden
görülebilmektedir. Yük invertörünün boyutu arttırıldıkça 1. invertöründe boyutunun
artması gerktiği sonucuna varılmıştır. Ayrıca yük invertörünün boyutlarının artması
yayılım gecikmesini arttırmaktadır. Yayılım gecikmesini düşük değerde tutabilmek
için 1. invertörün boyutları ile 2. invertörün boyutlarının yük invertörünün boyutları
ile uyumlu olası gerekmektedir. Bu yüzden yük invertörünün boyutlarının değişimine
bağlı olarak 1. ve 2. invertörlerin boyutlarının aynı anda değişmesi gerekmektedir.
Bu değişimin nasıl olacağını belirleyebilmek için Çizelge 2.6. de gösterildiği gibi,
yük invertörünün boyutlarını WpL=2U, WnL=1U değerlerinden başlayarak WpL
değerini 2U, WnL değerini 1U arttırılmıştır. Bu değerlere bağlı olarak, Çizelge 2.5.
ve çizelge 10.3. den elde edilen sonuçlar doğrultusunda en ideal 1. ve 2. invertör
boyutları PSPICE programında bir çok similasyon yapılarak belirlenmiştir. Bu en
ideal boyutlar ve bu boyutlara bağlı olarak yayılım gecikmelerinin değişimi çizelge
2.6. da verilmiştir. Buradan da örülebileceği üzere yük invertörünün boyutunun

79
artması; 1. ve 2. invertörün boyutlarını ayrıca yayılım gecikmesini arttırmaktadır.
Ancak elde edilen bu değerler oluşabilecek en ideal değerlerdir.
Çizelge 2.6. Yük İnvertörünün Değişimine Bağlı Olarak 1. ve 2. İnvertör Boyutları ve
Gecikme Zamanının Değişimi Yük İnvertörünün Değişimine Bağlı Olarak İnvertör Boyutları ve Gecikme Zamanının
Değişimi WpL=2, WnL=1 Wpi=4, Wni=2 WnP=10 Wp1=4, Wn1=2 Wp2=0,24,Wn2=0,12 tpd=0,0606WpL=4, WnL=2 Wpi=4, Wni=2 WnP=10 Wp1=10, Wn1=5 Wp2=0,24,Wn2=0,12 tpd=0,0606WpL=6, WnL=3 Wpi=4, Wni=2 WnP=10 Wp1=12, Wn1=6 Wp2=0,48,Wn2=0,24 tpd=0,0727WpL=8, WnL=4 Wpi=4, Wni=2 WnP=10 Wp1=14, Wn1=7 Wp2=0,48,Wn2=0,24 tpd=0,0788WpL=10, WnL=5 Wpi=4, Wni=2 WnP=10 Wp1=14, Wn1=7 Wp2=0,48,Wn2=0,24 tpd=0,0788WpL=12, WnL=6 Wpi=4, Wni=2 WnP=10 Wp1=16, Wn1=8 Wp2=0,52,Wn2=0,26 tpd=0,0848WpL=14, WnL=7 Wpi=4, Wni=2 WnP=10 Wp1=16, Wn1=8 Wp2=0,56,Wn2=0,28 tpd=0,0909WpL=16, WnL=8 Wpi=4, Wni=2 WnP=10 Wp1=18, Wn1=9 Wp2=0,60,Wn2=0,30 tpd=0,0909WpL=18, WnL=9 Wpi=4, Wni=2 WnP=10 Wp1=20, Wn1=10 Wp2=0,60,Wn2=0,30 tpd=0,0909WpL=20, WnL=10 Wpi=4, Wni=2 WnP=10 Wp1=20, Wn1=10 Wp2=0,64,Wn2=0,32 tpd=0,0969WpL=22, WnL=12 Wpi=4, Wni=2 WnP=10 Wp1=24, Wn1=12 Wp2=0,64,Wn2=0,32 tpd=0,0969WpL=24, WnL=14 Wpi=4, Wni=2 WnP=10 Wp1=24, Wn1=12 Wp2=0,64,Wn2=0,32 tpd=0,103 WpL=26, WnL=13 Wpi=4, Wni=2 WnP=10 Wp1=26, Wn1=12 Wp2=0,68,Wn2=0,34 tpd=0,103 WpL=28, WnL=14 Wpi=4, Wni=2 WnP=10 Wp1=28, Wn1=14 Wp2=0,72,Wn2=0,36 tpd=0,109 WpL=30, WnL=15 Wpi=4, Wni=2 WnP=10 Wp1=32, Wn1=16 Wp2=0,72,Wn2=0,36 tpd=0,1181
Bir elektronik devrede sadece yükün değişmesi invertör boyutlarını değiştirmez.
Girişe bağlı invertörler varsa bunlarında değişimi invertör boyutlarını etkilemektedir.
Bu similasyonu yapılan latch devresinde de girişe bağlı bulunan invertörün ( Wpi,
Wni ) boyutlarının değişmesi 1. ve 2. invertörün boyutları ile yayılım gecikmesini
değiştirmektedir. Çizelge 2.7. de bu değişimler görülmektedir.

80
Çizelge 2.7. Giriş İnvertörünün Değişimine Bağlı Olarak 1. ve 2. İnvertör Boyutları ve
Gecikme Zamanının Değişimi
Giriş İnvertörünün Değişimine Bağlı Olarak İnvertör Boyutları ve Gecikme Zamanının
Değişimi WpL=12, WnL=6 Wpi=2, Wni=1 WnP=10 Wp1=4, Wn1=2 Wp2=0,24, Wn2=0,12 tpd=0,1272WpL=12, WnL=6 Wpi=4, Wni=2 WnP=10 Wp1=6, Wn1=3 Wp2=0,24, Wn2=0,12 tpd=0,103 WpL=12, WnL=6 Wpi=6, Wni=3 WnP=10 Wp1=8, Wn1=4 Wp2=0,24, Wn2=0,12 tpd=0,0969WpL=12, WnL=6 Wpi=8, Wni=4 WnP=10 Wp1=10, Wn1=5 Wp2=0,24, Wn2=0,12 tpd=0,0848WpL=12, WnL=6 Wpi=10, Wni=5 WnP=10 Wp1=12, Wn1=6 Wp2=0,28, Wn2=0,14 tpd=0,0788WpL=12, WnL=6 Wpi=12, Wni=6 WnP=10 Wp1=14, Wn1=7 Wp2=0,28, Wn2=0,14 tpd=0,0887WpL=12, WnL=6 Wpi=14, Wni=7 WnP=10 Wp1=18, Wn1=9 Wp2=0,32, Wn2=0,16 tpd=0,0727WpL=12, WnL=6 Wpi=16, Wni=8 WnP=10 Wp1=20, Wn1=10 Wp2=0,32, Wn2=0,16 tpd=0,0727WpL=12, WnL=6 Wpi=18, Wni=9 WnP=10 Wp1=22, Wn1=11 Wp2=0,36, Wn2=0,18 tpd=0,0727WpL=12, WnL=6 Wpi=20, Wni=10 WnP=10 Wp1=24, Wn1=12 Wp2=0,36, Wn2=0,18 tpd=0,0666WpL=12, WnL=6 Wpi=22, Wni=11 WnP=10 Wp1=26, Wn1=13 Wp2=0,40, Wn2=0,20 tpd=0,0624WpL=12, WnL=6 Wpi=24, Wni=12 WnP=10 Wp1=30, Wn1=15 Wp2=0,48, Wn2=0,24 tpd=0,0606WpL=12, WnL=6 Wpi=26, Wni=13 WnP=10 Wp1=36, Wn1=18 Wp2=0,52, Wn2=0,26 tpd=0,0606WpL=12, WnL=6 Wpi=28, Wni=14 WnP=10 Wp1=36, Wn1=18 Wp2=0,52, Wn2=0,26 tpd=0,0606WpL=12, WnL=6 Wpi=30, Wni=15 WnP=10 Wp1=40, Wn1=20 Wp2=0,60, Wn2=0,30 tpd=0,0545
Giriş invertöründeki değişimin 1. ve 2. invertörlerin boyutlarına nasıl etki ettiğini
gözlemleyebilmek için yük invertörünün boyutları sabit tutulmuştur ( WpL=12U,
WnL=6U ). Giriş invertörünün boyutları Wpi=2U, Wni=1U değerinden başlayarak
Wpi değeri 2U, Wni değeri 1U arttırılarak en ideal 1. ve 2. invertör boyutları
belirlenmiştir. Çizelge 2.7. de görüldüğü gibi giriş invertörünün boyutunun
arttırılması sonucu 1. ve 2. invertörlerin boyutları artmakta fakat bu değerlere bağlı
olarak yayılım gecikmesi azalmaktadır.

81
4. SONUÇ VE DEĞERLENDİRME
4.1. Değerlerin Fuzzy Logicte İşlenmesi
Similasyonu yapılan devrenin girişindeki ve çıkışındaki invertörlerde kullanılan
MOSFET lerin Wp ve Wn boyutlarının değişmesi 1. ve 2. invertörler ile yayılım
gecikmesini değiştirmekteydi. Devrenin giriş ve çıkışında bağlı bulunan invertörlerin
değerlerinin değişmesi devrede 1. ve 2. invertörler ile yayılım gecikmesini
etkilediğinden, bu devre için oluşturulacak algoritmada 2 giriş değeri, 3 de çıkış
değeri bulunmalıdır. Çizelge 4.1. de giriş değişkenleri ile çıkış değişkenleri
gösterilmiştir.
Şekil 4.1. Fuzzy Logic Fis Editörü Belirlenen giriş ve çıkış değişkenleri için üyelik fonksiyonları belirlenmelidir. Bu
üyelik fonksiyonları similasyonun yapıldığı aralıkta 1,0 ve bu iki değer arasındaki
durumları içermektedir. Giriş değişkenleri ( WpL ve Wpi ) için üyelik fonksiyonları
çok az, az, orta, fazla, çok fazla olmak üzere 6 değişik durumdan oluşturulmuştur.
Şekil 4.2. de yük invertörüne ait olan üyelik fonksiyonu gösterilmiştir.

82
Çıkış değişkenleri ( Wp1, Wp2 ve yayılım Gecikmesi ) için ise, üyelik fonksiyonları;
az, orta, çok olmak üzere üç değişik durumdan oluşturulmuştur. Bunun sebebi giriş
değişkenlerine bağlı olarak çıkış değişkenlerinin her zaman değişiklik göstermemesi,
yani çıkış değişkenin daha az aralığa sahip olmasıdır. Üyelik fonksiyonları 1,0 ve bu
iki değer arasındaki bütün değerleri içerdiğinden similasyonu yapılamayan değerler
içinde en ideal değerlerin belirlenmesini sağlamaktadırlar.
Şekil 4.2. Yük İnvertörünün Üyelik Fonksiyonu Oluşturulan bu üyelik fonksiyonlarına göre Fuzzy Logic de kurallar yazılmalıdır.
Yazılan kurallar şekil 4.3. de gösterilmiştir. Kurallar yazılırken similasyon sonuçları
iyi analiz edilmeli ve orada elde edilen sonuçlar kurallar kısmına aktarılmalıdır. Eğer
kurallar yazılırken similasyon sonuçlarında elde edilmeyen bir durum yazılırsa çıkış
ekranında yanlış sonuçlar alınmaktadır.

83
Şekil 4.3. Kurallar Kuralların yazımı tamamlandıktan sonra artık giriş değerlerine bağlı olarak çıkış
değerlerinin nasıl değiştiği kontrol edilebilir. Bu işlem Fuzzy Logic de rule viewer
butonu kullanılarak yapılabilmektedir. Bu butona tıklandığında şekil 4.4. de
gösterilen şekil görülebilmektedir. Programda bu kısım açık iken giriş değişkenleri
üzerinde gösterilen çubuklar sağa ve sola hareket ettirilerek giriş değişkenlerinin
değeri arttırılıp azaltılabilmektedir. Bu işlem yapıldığında, kurallar kısmında
girişlerle çıkışlar bir birleri ile ilişkilendirildiklerinden çıkış değişkenlerinin değişimi
görülebilmektedir. Bu sayede yapılan yüzlerce similasyonun sonucuna ulaşmak
mümkün olmaktadır. Ayrıca çizelgelerde verilen değerler dışında onlarca değer
bulunmaktadır ve bunların similasyonu yapılamamıştır. Burada bu değerlere ait
bilgilere de ulaşılabilmektedir.

84
Şekil 4.4. Giriş Değişkenlerine Göre Çıkış Değerinin Değişimi
Şekil 4.4 de giriş değişkenlerin bağlı olarak çıkış değişkenlerinin değerleri sayısal
olarak görülebilmektedir. Ancak genel olarak giriş değişkenlerinin değerlerine bağlı
olarak çıkış değişkenlerinin değerlerinin nasıl değişti Fuzzy Logic de surface viewer
butonu kullanılarak görülebilmektedir. Şekil 4.5. de giriş değişkenleri olan; yük
invertörünün ( WpL ) ve giriş invertörünün ( Wpi ) değerlerinin değişimine bağlı
olarak yayılım gecikmesinin değişimi verilmiştir. Şekildeki yayılım gecikmesi
nanosaniye (ns) cinsindendir. Şekil 4.5. de görüldüğü gibi yük invertörünün
boyutunun artmasına bağlı olarak yayılım gecikmesi artmakta, giriş invertörünün
boyutunun artmasına bağlı olarak yayılım gecikmesi azalmaktadır. Bu iki değer aynı
anda bu şekilden incelenerek en uygun yayılım gecikmesini veren ( invertör )
MOSFET boyutlarını belirlemek mümkün olmaktadır.

85
Şekil 4.5. Giriş Değişkenlerine Bağlı Olarak Gecikmenin Üç Boyutlu Değişimi
Şekil 4.6. Girişe Bağlı Olarak 1.İnvertör Boyutunun Üç Boyutlu Değişimi

86
Şekil 4.6. da giriş değişkenlerine bağlı olarak 1. invertörün boyutunun değişimi
verilmiştir. Her iki giriş değerinin artmasına bağlı olarak 1. invertörün boyutlarının
arttığı buradan görülebilmektedir.
Şekil 4.7. Girişe Bağlı Olarak 2.İnvertör Boyutunun Üç Boyutlu Değişimi
Şekil 4.7. de giriş değerlerine bağlı olarak 2. invertörün ( Geri besleme invertörü )
boyutlarının değişimi verilmiştir. Her iki giriş değerinin artmasına bağlı olarak 2.
invertörün boyutları artmaktadır. Ama bu artış doğrusal değildir. O yüzden en ideal
boyutun belirlenebilmesi için şekil 4.7. ve şekil 4.4. birlikte analiz edilmelidir.
PSPICE programından alınan veriler ile Fuzzy de bulunan değerler arasında %10
fark vardır. Yani hata oranı %10 dur.

87
KAYNAKLAR
Kang, S.M, Leblebici, Y., 1999. CMOS Digital Integrated Circuits, WCB McGraw-Hill, 242(4), 320-340 s.
Ekiz, H., 2003. Mantık Devreleri, Sayısal Elektronik., Değişim Yayınları, 154(5),
269-285. Kahramanlı, Ş., Özcan, M., 2000. Lojik Tasarımın Temelleri, Nobel Yayın Dağıtım, Ankara, 151(3), 159-182 s. Buzluca, F., Lojik, 2000-2003. http://www.buzluca.com/lojik Actel Corparation., Aplication Note, March 2004 Nedovic, N., Oklabdzija., V., Walker., W., 2003. A Clock Skew Absorbing Flip-
Flop, IEEE International Solid-Stade Circuits Conference, paper 19.5 Hristov, K., Yanev, K., 2003. Edge Triggered D Flip-Flop, VLSI Desing, Yoshizava, H., Taniguchi, K., Nakashi, K., 1998. An Imlementation Technique of
Dynamic CMOS Circuit Applicable to Asynchronous/synchronous Logic, IEEE.,
Wu, C.Y., Li, C., Hwang J.S., 1998. Timing Macromodels for CMOS static set/reset
latches and their applications, IEE Proceedings, vol.135, Pt. E, No.3 Şen, Z., 1999. Mühendislikte Bulanık (Fuzzy) Modelleme İlkeleri, İTÜ, Uçak ve
Uzay Bilimleri Fakültesi. Nilsson, J., Riedel, S., 1994. Introduction To PSPICE, Literatür Yayıncılık Dağıtım
Pazarlama ve Tic. Ltd. Şti. Kayacan, C., Çelik, A., Salman, Ö., 2003. Tornalama İşlemlerinde Kesici Takım
Aşınmasının Bulanık Mantık İle Modellenmesi. TMMOP Makine Mühendisleri Odası Konya Şubesi.
Dejhan, K., Tooprakai, P., Mitatha, S., Cheevasuvit, F., Soonyeekan, C., 2000. Meta-
Stable Operation Consideration Of CMOS And BICMOS Static Latch Circuit. ICSE2000 Proceedings
Nedovic, N., Oklobdzija, V., Walker, W., 2003. A Clock Skew Absorbing Flip-Flop VLADIMIRESCU, A., LIU, S., 1985. Hybrid Latch Flip-Flop whit ımproved power
Efficiency. Proceedings of the 13th Symposium on Circuits And Systems Design.
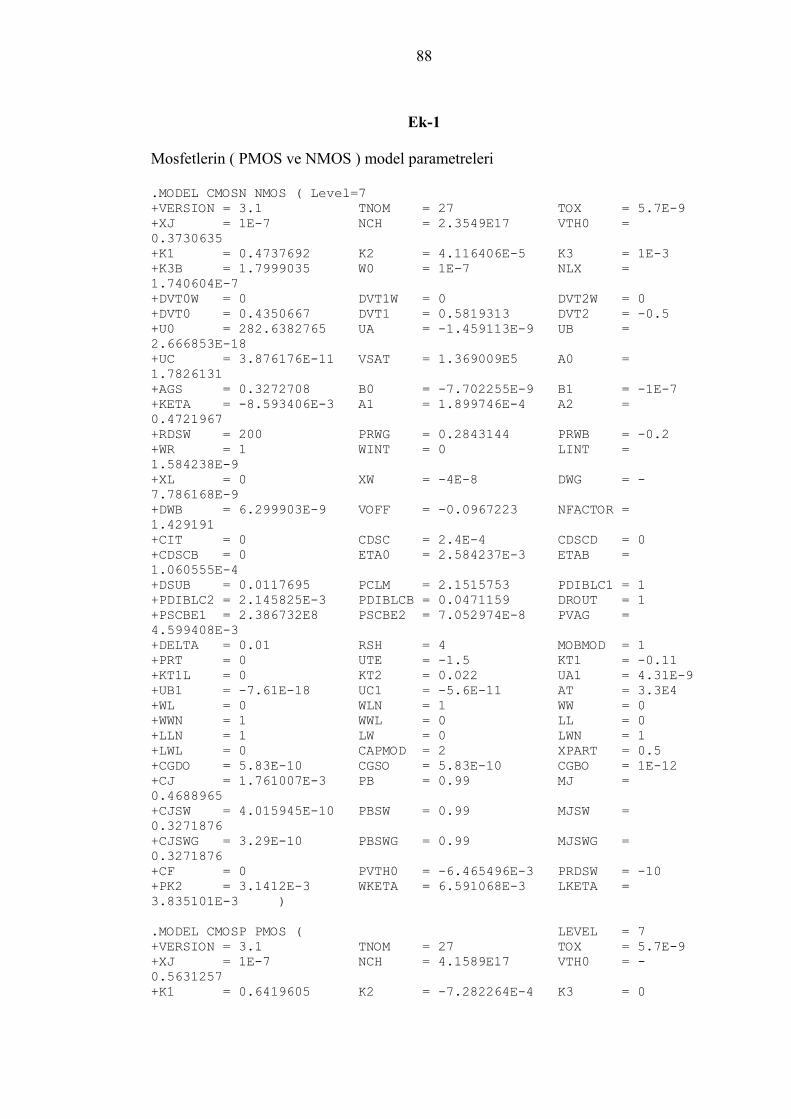
88
Ek-1 Mosfetlerin ( PMOS ve NMOS ) model parametreleri .MODEL CMOSN NMOS ( Level=7 +VERSION = 3.1 TNOM = 27 TOX = 5.7E-9 +XJ = 1E-7 NCH = 2.3549E17 VTH0 = 0.3730635 +K1 = 0.4737692 K2 = 4.116406E-5 K3 = 1E-3 +K3B = 1.7999035 W0 = 1E-7 NLX = 1.740604E-7 +DVT0W = 0 DVT1W = 0 DVT2W = 0 +DVT0 = 0.4350667 DVT1 = 0.5819313 DVT2 = -0.5 +U0 = 282.6382765 UA = -1.459113E-9 UB = 2.666853E-18 +UC = 3.876176E-11 VSAT = 1.369009E5 A0 = 1.7826131 +AGS = 0.3272708 B0 = -7.702255E-9 B1 = -1E-7 +KETA = -8.593406E-3 A1 = 1.899746E-4 A2 = 0.4721967 +RDSW = 200 PRWG = 0.2843144 PRWB = -0.2 +WR = 1 WINT = 0 LINT = 1.584238E-9 +XL = 0 XW = -4E-8 DWG = -7.786168E-9 +DWB = 6.299903E-9 VOFF = -0.0967223 NFACTOR = 1.429191 +CIT = 0 CDSC = 2.4E-4 CDSCD = 0 +CDSCB = 0 ETA0 = 2.584237E-3 ETAB = 1.060555E-4 +DSUB = 0.0117695 PCLM = 2.1515753 PDIBLC1 = 1 +PDIBLC2 = 2.145825E-3 PDIBLCB = 0.0471159 DROUT = 1 +PSCBE1 = 2.386732E8 PSCBE2 = 7.052974E-8 PVAG = 4.599408E-3 +DELTA = 0.01 RSH = 4 MOBMOD = 1 +PRT = 0 UTE = -1.5 KT1 = -0.11 +KT1L = 0 KT2 = 0.022 UA1 = 4.31E-9 +UB1 = -7.61E-18 UC1 = -5.6E-11 AT = 3.3E4 +WL = 0 WLN = 1 WW = 0 +WWN = 1 WWL = 0 LL = 0 +LLN = 1 LW = 0 LWN = 1 +LWL = 0 CAPMOD = 2 XPART = 0.5 +CGDO = 5.83E-10 CGSO = 5.83E-10 CGBO = 1E-12 +CJ = 1.761007E-3 PB = 0.99 MJ = 0.4688965 +CJSW = 4.015945E-10 PBSW = 0.99 MJSW = 0.3271876 +CJSWG = 3.29E-10 PBSWG = 0.99 MJSWG = 0.3271876 +CF = 0 PVTH0 = -6.465496E-3 PRDSW = -10 +PK2 = 3.1412E-3 WKETA = 6.591068E-3 LKETA = 3.835101E-3 ) .MODEL CMOSP PMOS ( LEVEL = 7 +VERSION = 3.1 TNOM = 27 TOX = 5.7E-9 +XJ = 1E-7 NCH = 4.1589E17 VTH0 = -0.5631257 +K1 = 0.6419605 K2 = -7.282264E-4 K3 = 0

89
+K3B = 7.915875 W0 = 1E-6 NLX = 2.685026E-8 +DVT0W = 0 DVT1W = 0 DVT2W = 0 +DVT0 = 3.1945843 DVT1 = 1 DVT2 = -0.1117614 +U0 = 101.3073694 UA = 1.041625E-9 UB = 1E-21 +UC = -1E-10 VSAT = 1.425879E5 A0 = 1.1063182 +AGS = 0.2045858 B0 = 1.017974E-6 B1 = 5E-6 +KETA = 0.0111427 A1 = 0.0109159 A2 = 0.3 +RDSW = 2.014607E3 PRWG = -0.03098 PRWB = -0.0309254 +WR = 1 WINT = 0 LINT = 4.068013E-8 +XL = 0 XW = -4E-8 DWG = -2.666714E-8 +DWB = 3.702655E-9 VOFF = -0.1370541 NFACTOR = 1.2435282 +CIT = 0 CDSC = 2.4E-4 CDSCD = 0 +CDSCB = 0 ETA0 = 0.2653362 ETAB = -0.0830656 +DSUB = 1.2359917 PCLM = 1.3932016 PDIBLC1 = 4.033555E-3 +PDIBLC2 = -4.055943E-9 PDIBLCB = -1E-3 DROUT = 0.0602572 +PSCBE1 = 2.392979E10 PSCBE2 = 2.163848E-9 PVAG = 0.0141131 +DELTA = 0.01 RSH = 3 MOBMOD = 1 +PRT = 0 UTE = -1.5 KT1 = -0.11 +KT1L = 0 KT2 = 0.022 UA1 = 4.31E-9 +UB1 = -7.61E-18 UC1 = -5.6E-11 AT = 3.3E4 +WL = 0 WLN = 1 WW = 0 +WWN = 1 WWL = 0 LL = 0 +LLN = 1 LW = 0 LWN = 1 +LWL = 0 CAPMOD = 2 XPART = 0.5 +CGDO = 6.76E-10 CGSO = 6.76E-10 CGBO = 1E-12 +CJ = 1.893734E-3 PB = 0.9889579 MJ = 0.4705132 +CJSW = 3.124347E-10 PBSW = 0.8 MJSW = 0.2786992 +CJSWG = 2.5E-10 PBSWG = 0.8 MJSWG = 0.2786992 +CF = 0 PVTH0 = 4.821637E-3 PRDSW = -2.2211772 +PK2 = 2.088108E-3 WKETA = 0.0199978 LKETA = -5.605069E-3 )

90
ÖZGEÇMİŞ Adı Soyadı : Kıvanç BAŞARAN Doğum Yeri : İzmir Doğum Yılı : 1978 Medeni Hali : Bekar Eğitim ve Akademik Durumu: Lise 1993 – 1997 Aydın Anadolu Teknik Lisesi Lisans 1997 – 2001 Gazi Üniversitesi Teknik Eğitim Fakültesi Elektrik Eğitimi Yabancı Dil : İngilizce İş Deneyimi: 2002 - S.D.Ü. Senirkent Meslek Yüksekokulu 2005 – A.D.Ü. Söke Meslek Yüksekokulu
Related Documents











