NanoBots By, Divyang Choudhary (1RE11ME035) Dept. Mech Engg. REVA ITM

NanoBots-Nanotechnology
Jul 15, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

NanoBots
By,
Divyang Choudhary
(1RE11ME035)
Dept. Mech Engg. REVA ITM

Abstract
▪ Nanotechnology is an emerging field in robotics which has yet to truly blossom to its full potential. It does, however promise a wealth of different solutions to problems which have plaguing mankind for all of existence.
▪ Nanotechnology is still a new science and nearly every advance made in this field is groundbreaking. It also represents an incredibly fascinating area of study and can hold solutions too many of the most pressing problems of our world. It has the potential to revolutionize medicine, environmental science, industry and even warfare.
2

Introduction
▪ What is Nanotechnology ?
▪ Nanotechnology is a multidisciplinary branch of science used in the application of creatingobjects on a scale smaller than 100 nanometers from the ground up.
▪ What are Nanobots and what can they be used for?
▪ The Czech word "robota" stands for "work". Thus a Nanorobot can be seen as nothing elsethan a nanoscale machine that does some work. There are many possible applications forNanobots: Probably one of the oldest ideas is to insert nanoscale devices in our bodies, wherethey could do observations, deliver chemical substances, repair cells and much more.
▪ There are plans to use nanorobots to make self-repairing suits for astronauts or to even tune orrepair your car or bike engines without dismantling them. They could also be used to analyzestructures and Integrated Circuits. Multi- purpose devices built of collaborating nanobots, thatcan change their shape and functionality are imaginable.
3

Construction Of NanoBots
▪ To build a nanorobot, like for their "normal sized" counterparts, sensors, actuators or manipulators and some sort of control would be needed. The construction itself is also a subject of research, as we can't just put the parts together with our hands.
▪ That Nano assembly is not impossible, has been proved by some encouraging attempts using scanning probe microscopes. Most of these devices or theories have been developed without the aim of constructing nanobots, but could be used for their implementation.
4
How will they move?
▪ For most applications it is sufficient for nanobots to be able to float in a fluid, what probably is easier to achieve than walking on a surface with big (micro-scale) obstacles. But also floating in fluids can be tricky.
▪ A. A. G. Requicha stated in one of his papers that already structures in the micro-scale range will have a Reynolds number in the range of 10-5 (Calculated with typical speed 10 micrometer/s and typical length of 1 micrometer), and thus will be in the low-Reynolds regime, which makes friction the dominant force.
▪ He also mentions that it appears that below 600nm no self-propelled organism can be found. Thus for small nanobots, diffusion should also be considered as a way of transportation.
5

Controls in NanoBots
▪ Types Of Controls:
▪ Central Control:
▪ The advantage of this central control is that there are basically no limits to the computation and theprogram complexity. In a task where you have a homogeneous group of Nanobots, performing thesame task simultaneously like in the Marsuit-Nanobots assemblers, this might be a good solution, asyou could just send one order to the whole group. But what if the tasks are not performedsimultaneously or you need feedback from the Nanobots?
▪ If so you will have to give every Nanobot a unique identification number, what will be a problem,first, as the Nanobot will need on board computation to distinguish whether or not a message is sentfor them, and second, as soon as you have a larger group of Nanorobots, you might need thousandsof these identifiers.
▪ Simple control circuits:
▪ In many applications complex computing might not be needed. For drug delivery, it could besufficient for the Nanobot to diffuse in the blood circuit until a certain environmental condition(some molecules, ph-value..) is present and then release the drug.
6
Controls in NanoBots (continued…)
▪ Swarming:
▪ There is an other, bio-inspired concept, called swarming. The main point about swarming is, that youhave relatively simple agents with limited capacities that, in collaboration with other agents, achieve aperformance that is much more than the sum of the individual performances.
▪ A termite swarm, for example, can do amazing things, while the single termites are quite simple. Andthat is exactly what is needed for Nanorobot swarms. That the concept also works outside nature hasfirst been showed by Craig Reynolds in 1986, who made a bird-swarm animation based on it.
7
Computing in Nanoscale
▪ No matter if central control, swarming or an other concept is used to controlNanobots, a certain on-board computation (and if it is only a switch) will always beneeded. In the following sites, different computing approaches are presented.
▪ Computing Approaches:
1. The universal Turing machine
2. Electro-Mechanical Approach
3. Field effect transistors
4. Quantum Electronics
5. Quantum Dot
6. Molecular Electronics
7. DNA Computing
8
The Universal Turing Machine
Alan Turing (1912-1954)
9
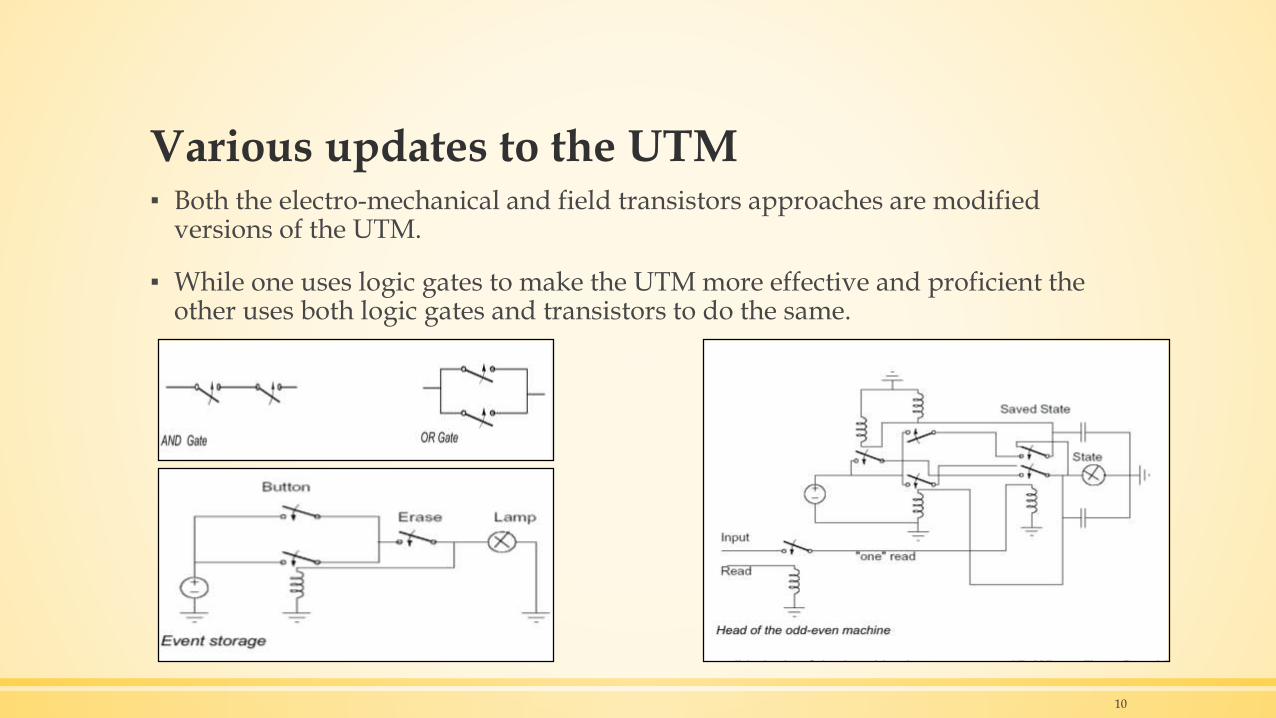
Various updates to the UTM▪ Both the electro-mechanical and field transistors approaches are modified
versions of the UTM.
▪ While one uses logic gates to make the UTM more effective and proficient the other uses both logic gates and transistors to do the same.
10
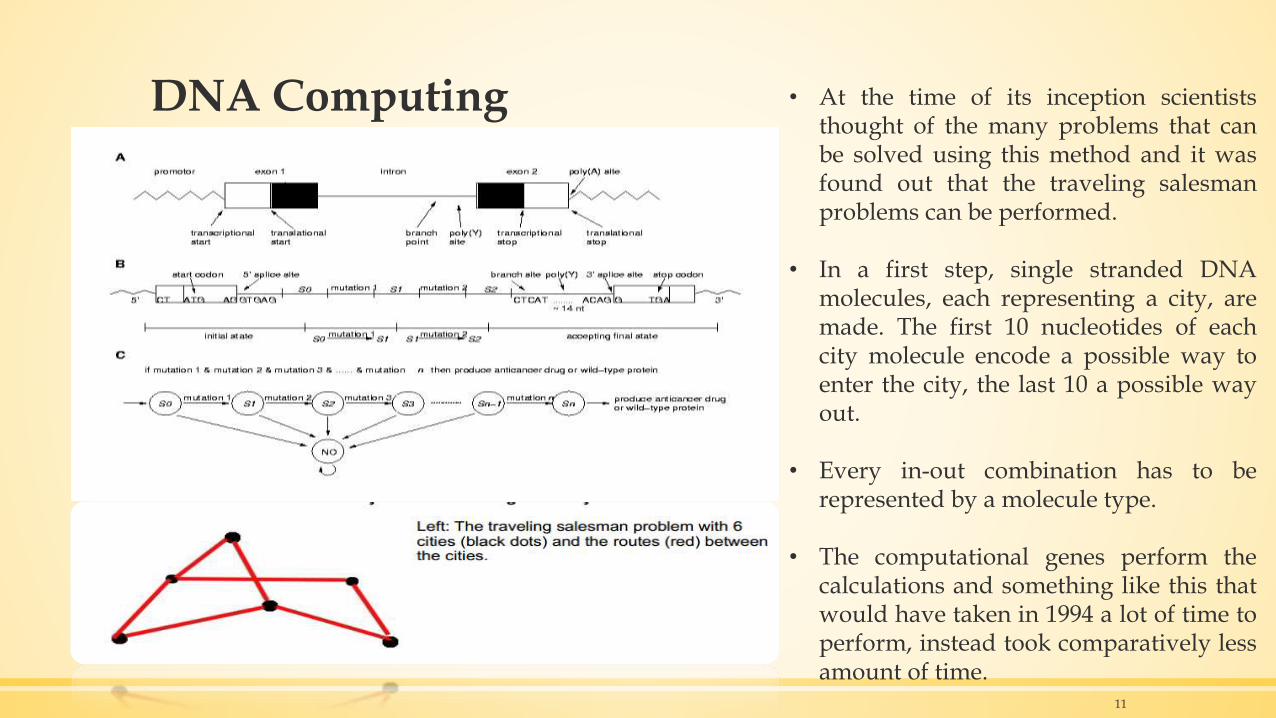
DNA Computing • At the time of its inception scientiststhought of the many problems that canbe solved using this method and it wasfound out that the traveling salesmanproblems can be performed.
• In a first step, single stranded DNAmolecules, each representing a city, aremade. The first 10 nucleotides of eachcity molecule encode a possible way toenter the city, the last 10 a possible wayout.
• Every in-out combination has to berepresented by a molecule type.
• The computational genes perform thecalculations and something like this thatwould have taken in 1994 a lot of time toperform, instead took comparatively lessamount of time.
11
DNA Computing (continued…)
▪ During the experiment, the "computation speed" was about 1,014 operations per seconds what is equal to 100 Teraflops (The fastest computer in 2002 achieved about 222 Teraflops).
▪ However to get the result that the scientists did, it did take a while to get the solutions right and a lot of effort.
▪ So, though it’s a promising approach it still needs a lot of research to be performed in order to get past the difficulties that were found out.
12
Advantages
1. More than million people in this world are affected by dreaded diseases.Currently there are no permanent vaccines or medicines available to curecertain myriad of diseases. The currently available drugs can increase thepatient’s life to a few years only, so the invention of this nanorobots will makethe patients to get rid of the disease.
2. As the nanorobot do not generate any harmful activities there is no side effect.It operates at specific site only.
3. The initial cost of development is only high but the manufacturing by batchprocessing reduces the cost.
13

Disadvantages
1. The nanorobot should be very accurate, otherwise harmful effects may occur.
2. The initial design cost is very high.
3. The design of this nanorobot is a very complicated one
14
Conclusion▪ The idea of Nanorobots seems futuristic, but the future is much nearer than one thinks. Nanobots are not scaled
down mechanical machines, instead as we have seen, in the nanoscale range, the dominant effects are differentfrom the ones in the macroscopic world. Brownian Motion, friction and tunneling play minor roles in the worldknown to us, but are significant factors in the Nano world.
▪ The scaling down of devices will at some point reach it's definite limits as the size of atoms sets final barriers.Rather than those small scale mechanical devices with gears, simple organic structures should be expected. In fact,the modified viruses used in genetic engineering to introduce DNA sequences to genomes could already be seen asbiology-based nanobots.
▪ Control of nanobots, even limited by their size, should be possible, as also with limited computation resources,quite complex behavior can be achieved.
▪ In terms of the logical devices some problems of "classical" field effect transistors, like non-homogeneous dopingand heat dissipation can be solved by tunneling devices (RTD, RTT, QD, SET), as they consume less power.
▪ To produce one quantum dot is one thing, but to build a complete logic device is completely different. Molecularelectronics can help at this point, as chemistry already offers a broad range of tools to manipulate molecules.
▪ Chemical computation is probably the one that is most likely to be used in Nanorobots. Drug delivery for examplejust needs a shell that opens when an environmental condition, like the presence of an other chemical, is met.
16
References
▪ Nanomedicine.org
▪ Foresight.com
▪ Lmr.use.edu
▪ Nanorobots.info
▪ Dbdresearchinstitue.com
▪ Stefan Bracher’s “Nanoscale Computing and actuators for potential use in Nanobots”, of Northwestern University ME 385 Nanotechnology
17

18

Any Questions?
19

20
Related Documents

![Medical Revolution - Nanobots [Read-Only]cc.ee.ntu.edu.tw/~ultrasound/belab/midterm_oral_files/2012_101_1/... · Medical Revolution - Nanobots Team 5 Produced by National Taiwan University,](https://static.cupdf.com/doc/110x72/5b40c4527f8b9a5e528d9ff2/medical-revolution-nanobots-read-onlycceentuedutwultrasoundbelabmidtermoralfiles20121011.jpg)






![Introduction to Nanotechnology What is Nanotechnology While many definitions for nanotechnology exist, the [National Nanotechnology Initiative] NNI calls.](https://static.cupdf.com/doc/110x72/56649d9e5503460f94a88dbf/introduction-to-nanotechnology-what-is-nanotechnology-while-many-definitions.jpg)


