MULTIPLE PREDICTION MULTIPLE PREDICTION & ATTENUATION & ATTENUATION Ruiqing He Ruiqing He University of University of Utah Utah Feb. Feb. 2004 2004

MULTIPLE PREDICTION & ATTENUATION Ruiqing He University of Utah Feb. 2004 Feb. 2004.
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MULTIPLE PREDICTION MULTIPLE PREDICTION & ATTENUATION& ATTENUATION
Ruiqing HeRuiqing He
University of UtahUniversity of Utah
Feb. 2004Feb. 2004
OutlineOutline
• IntroductionIntroduction
• Multiple traveltime prediction & examplesMultiple traveltime prediction & examples
• Multiple attenuation & examplesMultiple attenuation & examples
• ConclusionConclusion

IntroductionIntroduction
Facts about multiple problems:Facts about multiple problems:
• Multiple removal is important for quality Multiple removal is important for quality seismic imaging.seismic imaging.
• Multiple waveform prediction is difficult.Multiple waveform prediction is difficult.
• Multiple traveltime prediction is feasible.Multiple traveltime prediction is feasible.
• Multiples can be attenuated along their Multiples can be attenuated along their moveout in seismic traces.moveout in seismic traces.

OutlineOutline
• IntroductionIntroduction
• Multiple traveltime prediction & examplesMultiple traveltime prediction & examples
• Multiple attenuation & examplesMultiple attenuation & examples
• Application to synthetic and real dataApplication to synthetic and real data
• ConclusionConclusion

Multiple Traveltime PredictionMultiple Traveltime Prediction
• Predict solely from primary traveltimes. Predict solely from primary traveltimes.
Recent works:Recent works:- Landa E., 1999- Landa E., 1999- Reshef M., 2003- Reshef M., 2003- Schuster G., 2003- Schuster G., 2003
This work:This work:Data structure for implementationData structure for implementation
• No subsurface information needed.No subsurface information needed.• Valid for regular seismic acquisitions.Valid for regular seismic acquisitions.

Naming Convention: Type of RaysNaming Convention: Type of Rays
00
11
22
e.g. multiple:e.g. multiple:
SSGG
22 11 22 00 11

Prediction of Pegleg Multiple Prediction of Pegleg Multiple Traveltime by Format’s PrincipleTraveltime by Format’s Principle
00
11
22
SSGG pp
e.g. multiple: e.g. multiple: TT201201

Prediction of Interbed Multiple Prediction of Interbed Multiple Traveltime by Format’s PrincipleTraveltime by Format’s Principle
00
11
22
SSGG pp qq
e.g. multiple: e.g. multiple: TT212212

Multiple Prediction Algorithm Multiple Prediction Algorithm
1.1. Primary Primary traveltimestraveltimes are firstly picked and saved.are firstly picked and saved.
2.2. Primary-primary-interference multiplesPrimary-primary-interference multiples traveltimestraveltimes are predicted and saved.are predicted and saved.
3.3. Primary-multiple-interference multiplesPrimary-multiple-interference multiples traveltimes are predicted and saved.traveltimes are predicted and saved.
4. 4. Multiple-multiple-interference multiplesMultiple-multiple-interference multiples traveltimes are predicted and saved.traveltimes are predicted and saved.

Part of The SMAART ModelPart of The SMAART Model
DepthDepth (m)(m)
00
9 km9 kmOffset (m)Offset (m)00 15 km15 km
reflector 0reflector 0
reflector 1reflector 1
reflector reflector 22
reflector 3reflector 3

Pick Traveltime of Primary 1Pick Traveltime of Primary 1

Picked Primary 1Picked Primary 1
Picked

Prediction of Multiple 101Prediction of Multiple 101
Picked
Predicted

Prediction of Multiple 10101Prediction of Multiple 10101
Picked
PredictedNewlyPredicted

Prediction of pegleg 102Prediction of pegleg 102
Picked
Picked
Predicted

Prediction of pegleg 201Prediction of pegleg 201
Picked
Picked
Predicted

Order of PeglegsOrder of Peglegs
• 102 and 201 are different multiples.102 and 201 are different multiples.
• They are identical to each other only when They are identical to each other only when the model is 1 D, and all the reflectors are the model is 1 D, and all the reflectors are horizontal.horizontal.
• They are similar in most cases.They are similar in most cases.
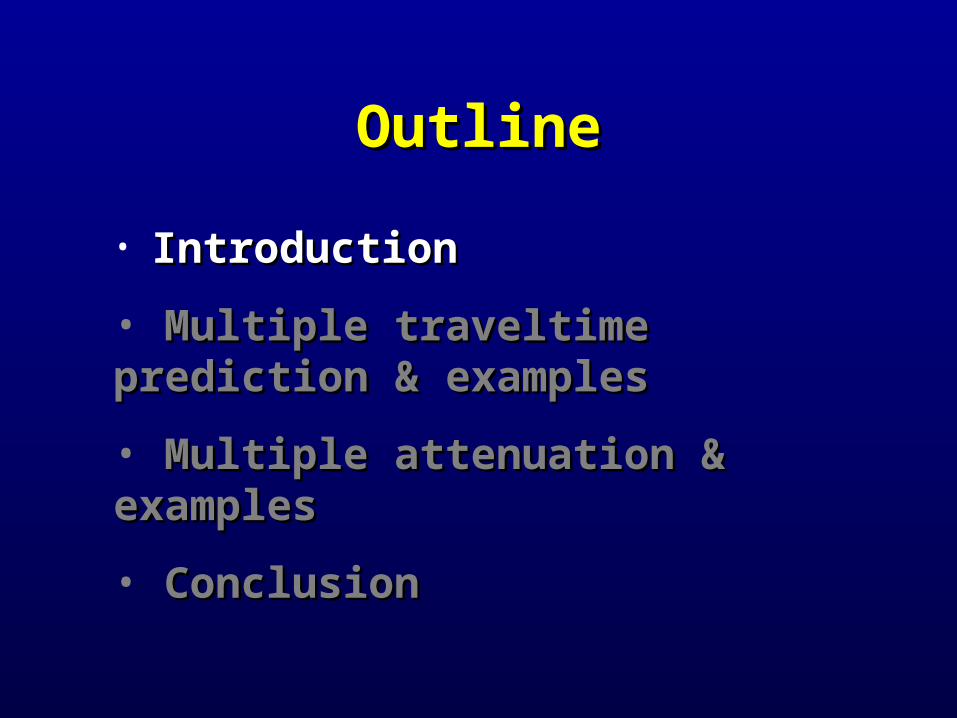
Prediction of pegleg 323Prediction of pegleg 323
Picked
Picked
Predicted

Unocal Multiple 101Unocal Multiple 101
Time (s)Time (s)
0.20.2
44
Offset (km)Offset (km)0.20.2 33

Unocal Multiple 10101Unocal Multiple 10101
Time (s)Time (s)
0.20.2
44
Offset (km)Offset (km)0.20.2 33

OutlineOutline
• IntroductionIntroduction
• Multiple traveltime prediction & examplesMultiple traveltime prediction & examples
• Multiple attenuation & examplesMultiple attenuation & examples
• ConclusionConclusion

Multiple AttenuationMultiple Attenuation
• Deterministic methods:Deterministic methods:– Multiple waveform predictionMultiple waveform prediction
• Non-deterministic methods: Non-deterministic methods: – Prediction filtering and median filteringPrediction filtering and median filtering

NMO of MultiplesNMO of Multiples
dtdt
offsetoffset
TT
Original windowOriginal window
PredictedPredictedmultiplemultiple dtdt
TT
offsetoffset
NMO windowNMO window
Predicted Predicted multiplemultiple

Prediction FilteringPrediction Filtering
Prediction filter F satisfies:Prediction filter F satisfies:
A(x) * F = A(x+d) A(x) * F = A(x+d)
where,where,
A: A: amplitudeamplitude
x: x: offsetoffset
d: d: is prediction distanceis prediction distance
*: *: is convolution operatoris convolution operator

Multi-channel Prediction FilteringMulti-channel Prediction Filtering(MPF)(MPF)
• Multi-channel Prediction filter F:Multi-channel Prediction filter F:
AA(t)(t)(x) * F = A(x) * F = A(t)(t)(x+d)(x+d)
where, Awhere, A(t)(t) is the amplitude at the relative time in NMO is the amplitude at the relative time in NMO window.window.
• F is the prediction filter for all (time) channels F is the prediction filter for all (time) channels simultaneously. simultaneously.
• Avoid local anomalies.Avoid local anomalies.
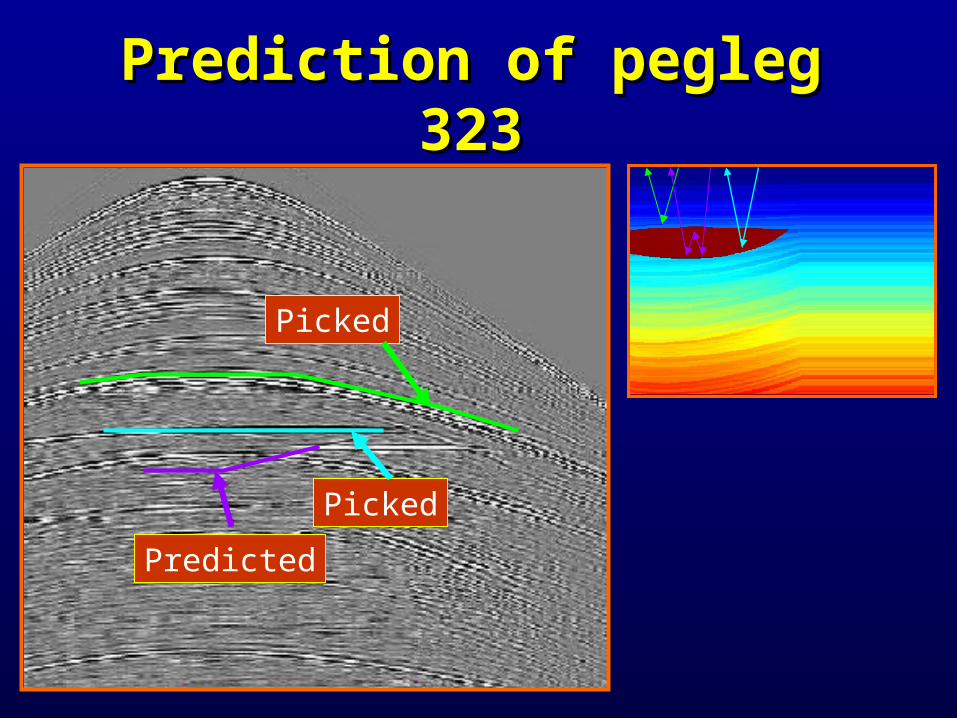
Experiments on Synthetic DataExperiments on Synthetic Data
Offset (km)Offset (km)
Time (s)Time (s)
11
66
11 32
One part of zero-offset SMAART dataOne part of zero-offset SMAART data

Median FilteringMedian FilteringFilter length=10Filter length=10 Filter length=20Filter length=20
Linear zoneLinear zone
Non-linearNon-linear zonezone

Mul-tichannel Prediction Mul-tichannel Prediction FilteringFiltering
Linear zoneLinear zone
Non-linearNon-linear zonezone
Filter length=5Filter length=5 Filter length=10Filter length=10

MPF & Median FilteringMPF & Median Filtering
Offset (km)Offset (km)
Time (s)Time (s)
11
66
11 32

MPF & Median FilteringMPF & Median Filtering

Unocal Field Data DemultipleUnocal Field Data Demultiple
Offset (km)Offset (km)
Time (s)Time (s)
11
440.20.2 33

Unocal Field Data DemultipleUnocal Field Data Demultiple

Unocal Field Data DemultipleUnocal Field Data Demultiple
Offset (km)Offset (km)
Time (s)Time (s)
11
440.20.2 33

Unocal Field Data DemultipleUnocal Field Data Demultiple

OutlineOutline
• IntroductionIntroduction
• Multiple traveltime prediction & examplesMultiple traveltime prediction & examples
• Multiple attenuation & examplesMultiple attenuation & examples
• ConclusionConclusion

ConclusionConclusion
• Without knowing subsurface model, multiple Without knowing subsurface model, multiple travel-time can be accurately predicted.travel-time can be accurately predicted.
• By prediction filtering or median filtering, By prediction filtering or median filtering, multiple can be attenuated.multiple can be attenuated.
•However, there are multiples can not be treated However, there are multiples can not be treated by the proposed method, then a multipleby the proposed method, then a multiple waveform prediction for them is required.waveform prediction for them is required.

ReferenceReference
1. Houston L., 1998: Multiple suppression using a local Houston L., 1998: Multiple suppression using a local coherence filter, Geophysics, Volume 63, Issue 2, 652-659. coherence filter, Geophysics, Volume 63, Issue 2, 652-659. 2. Landa E., 1999, Multiple prediction and attenuation 2. Landa E., 1999, Multiple prediction and attenuation using wavefront characteristics of multiple-generating using wavefront characteristics of multiple-generating primaries: The Leading Edge, January, 60-64.primaries: The Leading Edge, January, 60-64.3. Reshef M., et al. 2003, Multiple prediction without 3. Reshef M., et al. 2003, Multiple prediction without prestack data: an efficient tool for interpretive processing:prestack data: an efficient tool for interpretive processing: First Break, Vol. 21, March, 29-37.First Break, Vol. 21, March, 29-37.4. Schuster G., 2003, Imaging the most bounce out of 4. Schuster G., 2003, Imaging the most bounce out of multiples: UTAM 2002 annual meeting.multiples: UTAM 2002 annual meeting.

ThanksThanks
• 2003 members of UTAM for financial 2003 members of UTAM for financial support.support.
Related Documents




![Cannabis Health - [Jan/Feb 2004]](https://static.cupdf.com/doc/110x72/577d39931a28ab3a6b9a18fc/cannabis-health-janfeb-2004.jpg)