Modeling, Identification and Control, Vol. 33, No. 3, 2012, pp. 111–122, ISSN 1890–1328 Multiobjective Optimum Design of a 3-R RR Spherical Parallel Manipulator with Kinematic and Dynamic Dexterities Guanglei Wu 1 1 Department of Mechanical and Manufacturing Engineering, Aalborg University, 9220 Aalborg, Denmark. E-mail: [email protected] Abstract This paper deals with the kinematic synthesis problem of a 3-R RR spherical parallel manipulator, based on the evaluation criteria of the kinematic, kinetostatic and dynamic performances of the manipulator. A multiobjective optimization problem is formulated to optimize the structural and geometric parameters of the spherical parallel manipulator. The proposed approach is illustrated with the optimum design of a special spherical parallel manipulator with unlimited rolling motion. The corresponding optimization problem aims to maximize the kinematic and dynamic dexterities over its regular shaped workspace. Keywords: Spherical parallel manipulator, multiobjective optimization, Cartesian stiffness matrix, dex- terity, Generalized Inertia Ellipsoid 1 Introduction A three Degrees of Freedom (3-DOF) spherical paral- lel manipulator (SPM) is generally composed of two pyramid-shaped platforms, namely, a mobile platform (MP) and a fixed base that are connected together by three identical legs, each one consisting of two curved links and three revolute joints. The axes of all joints intersect at a common point, namely, the center of ro- tation. Such a spherical parallel manipulator provides a three degrees of freedom rotational motion. Most of the SPMs find their applications as orienting de- vices, such as camera orienting and medical instrument alignment (Gosselin and Hamel, 1994; Li and Payan- deh, 2002; Cavallo and Michelini, 2004; Chaker et al., 2012). Besides, they can also be used to develop ac- tive spherical manipulators, i.e., wrist joint (Asada and Granito, 1985). In designing parallel manipulators, a fundamental problem is that their performance heavily depends on their geometry (Hay and Snyman, 2004) and the mu- tual dependency of the performance measures. The manipulator performance depends on its dimensions while the mutual dependency among the performances is related to manipulator applications (Merlet, 2006b). The evaluation criteria for design optimization can be classified into two groups: one relates to the kinematic performance of the manipulator while the other relates to the kinetostatic/dynamic performance of the ma- nipulator (Caro et al., 2011). In the kinematic con- siderations, a common concern is the workspace (Mer- let, 2006a; Kong and Gosselin, 2004; Liu et al., 2000; Bonev and Gosselin, 2006). The size and shape of the workspace are of primary importance. Workspace based design optimization can usually be solved with two different formulations, the first formulation aim- ing to design a manipulator whose workspace contains a prescribed workspace (Hay and Snyman, 2004) and the second approach being to design a manipulator whose workspace is as large as possible (Lou et al., 2005). In Ref. (Bai, 2010), the SPM dexterity was op- timized within a prescribed workspace by identifying doi:10.4173/2012.3.3 c 2012 Norwegian Society of Automatic Control

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Modeling, Identification and Control, Vol. 33, No. 3, 2012, pp. 111–122, ISSN 1890–1328
Multiobjective Optimum Design of a 3-RRRSpherical Parallel Manipulator with Kinematic and
Dynamic Dexterities
Guanglei Wu 1
1Department of Mechanical and Manufacturing Engineering, Aalborg University, 9220 Aalborg, Denmark.E-mail: [email protected]
Abstract
This paper deals with the kinematic synthesis problem of a 3-RRR spherical parallel manipulator, basedon the evaluation criteria of the kinematic, kinetostatic and dynamic performances of the manipulator. Amultiobjective optimization problem is formulated to optimize the structural and geometric parametersof the spherical parallel manipulator. The proposed approach is illustrated with the optimum design ofa special spherical parallel manipulator with unlimited rolling motion. The corresponding optimizationproblem aims to maximize the kinematic and dynamic dexterities over its regular shaped workspace.
Keywords: Spherical parallel manipulator, multiobjective optimization, Cartesian stiffness matrix, dex-terity, Generalized Inertia Ellipsoid
1 Introduction
A three Degrees of Freedom (3-DOF) spherical paral-lel manipulator (SPM) is generally composed of twopyramid-shaped platforms, namely, a mobile platform(MP) and a fixed base that are connected together bythree identical legs, each one consisting of two curvedlinks and three revolute joints. The axes of all jointsintersect at a common point, namely, the center of ro-tation. Such a spherical parallel manipulator providesa three degrees of freedom rotational motion. Mostof the SPMs find their applications as orienting de-vices, such as camera orienting and medical instrumentalignment (Gosselin and Hamel, 1994; Li and Payan-deh, 2002; Cavallo and Michelini, 2004; Chaker et al.,2012). Besides, they can also be used to develop ac-tive spherical manipulators, i.e., wrist joint (Asada andGranito, 1985).
In designing parallel manipulators, a fundamentalproblem is that their performance heavily depends ontheir geometry (Hay and Snyman, 2004) and the mu-
tual dependency of the performance measures. Themanipulator performance depends on its dimensionswhile the mutual dependency among the performancesis related to manipulator applications (Merlet, 2006b).The evaluation criteria for design optimization can beclassified into two groups: one relates to the kinematicperformance of the manipulator while the other relatesto the kinetostatic/dynamic performance of the ma-nipulator (Caro et al., 2011). In the kinematic con-siderations, a common concern is the workspace (Mer-let, 2006a; Kong and Gosselin, 2004; Liu et al., 2000;Bonev and Gosselin, 2006). The size and shape ofthe workspace are of primary importance. Workspacebased design optimization can usually be solved withtwo different formulations, the first formulation aim-ing to design a manipulator whose workspace containsa prescribed workspace (Hay and Snyman, 2004) andthe second approach being to design a manipulatorwhose workspace is as large as possible (Lou et al.,2005). In Ref. (Bai, 2010), the SPM dexterity was op-timized within a prescribed workspace by identifying
doi:10.4173/2012.3.3 c© 2012 Norwegian Society of Automatic Control
http://dx.doi.org/10.4173/2012.3.3
-
Modeling, Identification and Control
(a) (b)
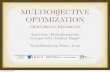
Figure 1: 3-RRR unlimited-roll SPM: (a) CAD model, (b) application as spherically actuated joint.
the design space. It is known from (Gosselin and An-geles, 1989) that the orientation workspace of a SPMis a maximum when the geometric angles of the linksare equal to 90o. However, maximizing the workspacemay lead to a poor design with regard to the manip-ulator dexterity and manipulability (Stamper et al.,1997; Durand and Reboulet, 1997). This problem canbe solved by properly defining the constraints on dex-terity (Merlet, 2006a; Huang et al., 2003). For theoptimum design of SPMs, a number of works focus-ing on the kinematic performance, mainly the dexter-ity and workspace, have been reported, whereas, thekinetostatic/dynamic aspects receive relatively less at-tention. In general, the design process simultaneouslydeals with the two previously mentioned groups, bothof which include a number of performance measuresthat essentially vary throughout the workspace. On thekinetostatic aspect, the SPM stiffness is an importantconsideration (Liu et al., 2000) to characterize its elas-tostatic performance. When they are used to developspherically actuated joint, not only the MP angulardisplacement but also the translational displacement ofthe rotation center should be evaluated from the Carte-sian stiffness matrix of the manipulator and should beminimized. Moreover, the dynamic performance of themanipulator should be as high as possible.
Among the evaluation criteria for optimum geomet-ric parameters design, an efficient approach is to solvea multiobjective optimization problem, which takes allor most of the evaluation criteria into account. As theobjective functions are usually conflicting, no single so-lution can be achieved in this process. The solutions
of such a problem are non-dominated solutions, alsocalled Pareto-optimal solutions. Some multiobjectiveoptimization problems of parallel manipulators (PMs)have been reported in the last few years. Hao and Mer-let proposed a method different from the classical ap-proaches to obtain all the possible design solutions thatsatisfy a set of compulsory design requirements, wherethe design space is identified via the interval analy-sis based approach (Hao and Merlet, 2005). Ceccarelliet al. focused on the workspace, singularity and stiff-ness properties to formulate a multi-criterion optimumdesign procedure for both parallel and serial manipu-lators (Ceccarelli et al., 2005). Stock and Miller for-mulated a weighted sum multi-criterion optimizationproblem with manipulability and workspace as two ob-jective functions (Stock and Miller, 2003). Krefft andHesselbach formulated a multi-criterion elastodynamicoptimization problem for parallel mechanisms whileconsidering workspace, velocity transmission, inertia,stiffness and the first natural frequency as optimizationobjectives (Krefft and Hesselbach, 2005). Altuzarra etal. dealt with the multiobjective optimum design of aparallel Schönflies motion generator, in which the ma-nipulator workspace volume and dexterity were consid-ered as objective functions (Altuzarra et al., 2009).
In this work, a multiobjective design optimizationproblem is formulated. The design optimization prob-lem of the 3-DOF spherical parallel manipulator con-siders the kinematic performance, the accuracy and thedynamic dexterity of the mechanism under design. Theperformances of the mechanism are also optimized overa regular shaped workspace. The multiobjective de-
112
-
G. Wu, “Multiobjective optimization of spherical parallel manipulator”
(a) (b)
Figure 2: Architecture of a general SPM: (a) overview, (b) parameterization of the ith leg.
sign optimization problem is illustrated with a 3-RRRSPM shown in Figure 1, which can replace the serialchains based wrist mechanisms. The non-dominatedsolutions, also called Pareto-optimal solutions, of themultiobjective optimization problem are obtained witha genetic algorithm.
2 Manipulator Architecture
The spherical parallel manipulator under study is anovel robotic wrist with an unlimited roll motion (Bai,2010; Bai et al., 2009), which only consists of threecurved links connected to a mobile platform (MP). Themobile platform is supposed to be quite stiffer than thelinks, which is considered as a rigid body. The threelinks are driven by three actuators moving indepen-dently on a circular rail of model HCR 150 from THKvia pinion and gear-ring transmissions. Thanks to thecircular guide, the overall stiffness of the mechanism isincreased. Moreover, such a design enables the SPMto generate an unlimited rolling motion, in addition tolimited pitch and yaw rotations.
A general spherical parallel manipulator is shown inFigure 2(a) (Liu et al., 2000). Figure 2(b) representsthe parameters associated with the ith leg of the SPM,
i = 1, 2, 3. The SPM is composed of three legs thatconnect the mobile-platform to the base. Each leg iscomposed of three revolute joints. The axes of the revo-lute joints intersect and their unit vectors are denotedby ui, wi and vi, i = 1, 2, 3. The arc angles of thethree proximal curved links are the same and equal toα1. Likewise, the arc angles of the three distal curvedlinks are the same and equal to α2. The radii of thelink midcurves are the same and equal to R. Geometricangles β and γ define the geometry of the two pyrami-dal base and mobile platforms. The presented SPM inFigure 1(a) is a special case with γ = 0. The origin Oof the reference coordinate system Fa is located at thecenter of rotation.
3 Kinematic and KinetostaticModeling of the SPM
The kinematics of the SPMs has been well docu-mented (Gosselin and Angeles, 1989), which is not re-peated in detail here. Hereafter, the orientation of themobile platform is described by the orientation repre-sentation of azimuth-tilt-torsion (φ − θ − σ) (Bonev,2008), for which the rotation matrix is expressed as
Q =
cφcθc(φ− σ) + sφs(φ− σ) cφcθs(φ− σ)− sφc(φ− σ) cφsθsφcθc(φ− σ)− cφs(φ− σ) sφcθs(φ− σ) + cφc(φ− σ) sφsθ−sθc(φ− σ) −sθs(φ− σ) cθ
(1)
113
-
Modeling, Identification and Control
where φ ∈ (−π, π], θ ∈ [0, π), σ ∈ (−π, π], and s(·) =sin(·), c(·) = cos(·).
Under the prescribed coordinate system, unit vectorui is expressed in the base frame Fa below:
ui =[− sin ηi sin γ cos ηi sin γ − cos γ
]T(2)
where ηi = 2(i− 1)π/3, i = 1, 2, 3.Unit vector wi of the intermediate revolute joint axis
in the ith leg is expressed in Fa as:
wi =
−sηisγcα1 + (cηisθi − sηicγcθi)sα1cηisγcα1 + (sηisθi + cηicγcθi)sα1−cγcα1 + sγcθisα1
(3)The unit vector vi of the last revolute joint axis in
the ith leg, is a function of the mobile-platform orien-tation, namely,
vi = Qv∗i (4)
where v∗i corresponds to the unit vector of the last rev-olute joint axis in the ith leg when the mobile platformis in its home configuration:
v∗i =[− sin ηi sinβ cos ηi sinβ cosβ
]T(5)
3.1 Kinematic Jacobian matrix
Let ω denote the angular velocity of the mobile-platform, the screws velocity equation via the ith legcan be stated as
$ω =
[ω0
]= θ̇i$̂
iA + ψ̇i$̂
iB + ξ̇i$̂
iC (6)
with the screws for the revolute joints at points Ai, Biand Ci expressed as
$̂iA =
[ui0
], $̂iB =
[wi0
], $̂iC =
[vi0
]Since the axes of the two passive revolute joints in eachleg lie in the plane BiOCi, the following screw is recip-rocal to all the revolute joint screws of the ith leg anddoes not lie in its constraint wrench system:
$̂ir =
[0
wi × vi
](7)
Applying the orthogonal product (◦) (Tsai, 1998) toboth sides of Eqn. (6) yields
$̂ir ◦ $ω = (wi × vi)Tω = (ui ×wi) · viθ̇i (8)
As a consequence, the expression mapping from themobile platform twist to the input angular velocities isstated as:
Aω = Bθ̇ (9)
with
A =[a1 a2 a3
], ai = wi × vi (10a)
B = diag[b1 b2 b3
], bi = (ui ×wi) · vi (10b)
where θ̇ =[θ̇1 θ̇2 θ̇3
]T. Matrices A and B are the
forward and inverse Jacobian matrices of the manipu-lator, respectively. If B is nonsingular, the kinematicJacobian matrix J is obtained as
J = B−1A (11)
3.2 Cartesian stiffness matrix
The stiffness model of the SPM under study is estab-lished with virtual spring approach (Pashkevich et al.,2009), by considering the actuation stiffness, link de-formation and the influence of the passive joints. Theflexible model of the ith leg is represented in Figure 3.Figure 3(b) illustrates the link deflections and varia-tions in passive revolute joint angles.
Let the center of rotation be the reference point ofthe mobile platform. Analog to Eqn. (6), the smalldisplacement screw of the mobile-platform can be ex-pressed as:
$iO =
[∆φ∆p
]= ∆θi$̂
iA + ∆ψi$̂
iB + ∆ξi$̂
iC (12)
where ∆p = [∆x, ∆y, ∆z]T
is linear displacement of
the rotation center and ∆φ = [∆φx, ∆φy, ∆φz]T
isthe MP orientation error. Note that this equation onlyincludes the joint variations, while for the real manip-ulator, link deflections should be considered as well.
The screws associated with the link deflections areformulated as follows:
$̂iu1 =
[ri
riC × ri
], $̂iu2 = $̂
iC , $̂
iu3 =
[ni
riC × ni
](13)
$̂iu4 =
[0ri
], $̂iu5 =
[0vi
], $̂iu6 =
[0ni
]where ni = wi × vi is the normal vectors of planeBiOCi, ri = wi × ni, and riC is the position vector ofpoint Ci from O. The directions of the vectors ri andni are identical to ∆u
i4 and ∆u
i6, respectively.
By considering the link deflections ∆ui1...∆ui6 and
variations in passive joint angles and adding all thedeflection freedoms to Eqn. (12), the mobile platformdeflection in the ith leg is stated as
$iO =∆θi$̂iA + ∆ψi$̂
iB + ∆ξi$̂
iC + ∆u
i1$̂iu1 + ∆u
i2$̂iu2
+ ∆ui3$̂iu3 + ∆u
i4$̂iu4 + ∆u
i5$̂iu5 + ∆u
i6$̂iu6 (14)
The previous equation can be written in a compactform by separating the terms related to the variations
114
-
G. Wu, “Multiobjective optimization of spherical parallel manipulator”
(a)
(b)
Figure 3: Flexible model of a single leg: (a) virtualspring model, where Ac stands for the actua-tor, R for revolute joints and MP for the mo-bile platform, (b) link deflections and jointvariations in the ith leg.
in the passive revolute joint angles and those relatedto the actuator and link deflections, namely,
$iO = Jiθ∆ui + J
iq∆qi (15)
with
Jiθ =[$̂iA $̂
iu1 $̂
iu2 $̂
iu3 $̂
iu4 $̂
iu5 $̂
iu6
](16a)
Jiq =[$̂iB $̂
iC
](16b)
∆ui =[∆θi ∆u
i1 ∆u
i2 ∆u
i3 ∆u
i4 ∆u
i5 ∆u
i6
]T(16c)
∆qi =[∆ψi ∆ξi
]T(16d)
Let the external wrench applied to the end of the ithleg be denoted by fi, the constitutive law of the ith legcan be expressed as
fi =
[Krr KrtKTrt Ktt
]i
[∆φ∆p
]→ fi = Ki$iO (17)
On the other hand, the wrench applied to the articu-lated joints in the ith leg being denoted by a vector τi,the equilibrium condition for the system is written as,
JiT
θ fi = τi, JiT
q fi = 0, ∆ui = Ki−1
θ τi (18)
Combining Eqns. (15), (17) and (18), the kinetostaticmodel of the ith leg can be reduced to a system of twomatrix equations, namely,[
Siθ Jiq
JiqT
02×2
] [fi
∆qi
]=
[$iO02×1
](19)
where the sub-matrix Siθ = JiθK
i−1
θ JiT
θ describes thespring compliance relative to the center of rotation,and the sub-matrix Jiq takes into account the passivejoint influence on the mobile platform motions.
Ki−1
θ is a 7× 7 matrix, describing the compliance ofthe virtual springs and taking the form:
Ki−1
θ =
[Ki
−1
act 01×606×1 K
i−1
L
](20)
where Kiact corresponds to the stiffness of the ith actua-tor. KiL of size 6×6 is the stiffness matrix of the curvedlink in the ith leg, which is calculated by means of theEuler-Bernoulli stiffness model of a cantilever. In Fig-ure 3(b), ∆u1, ∆u2 and ∆u3 show the three momentdirections while ∆u4, ∆u5 and ∆u6 show the threeforce directions, thus, using Castigliano’s theorem (Hi-bbeler, 1997), the compliance matrix of the curved linktakes the form:
Ki−1
L =
C11 C12 0 0 0 C16C12 C22 0 0 0 C260 0 C33 C34 C35 00 0 C34 C44 C45 00 0 C35 C45 C55 0C16 C26 0 0 0 C66
(21)
where the corresponding elements are given in Ap-pendix A.
The matrix Jiθ of size 6 × 7 is the Jacobian matrixrelated to the virtual springs and Jiq of 6 × 2, the onerelated to revolute joints in the ith leg. The Carte-sian stiffness matrix Ki of the ith leg is obtained fromEqn. (19),
fi = Ki$iO (22)
where Ki is a 6×6 sub-matrix, which is extracted fromthe inverse of the 8× 8 matrix on the left-hand side ofEqn. (19). From f =
∑3i=1 fi, $O = $
iO and f = K$O,
the Cartesian stiffness matrix K of the system is foundby simple addition, namely,
K =
3∑i=1
Ki (23)
115
-
Modeling, Identification and Control
3.3 Mass matrix
The mass in motion of the mechanism influences thedynamic performance, such as inertia, acceleration,etc., hence, formulating the mass matrix is one impor-tant procedure in the dynamic analysis. Mass matrixis the function of manipulator dimensions and materialproperties, i.e., link lengths, cross-sectional area, massdensity. Generally, the manipulator mass matrix (iner-tia matrix) can be obtained on the basis of its kineticenergy. The total kinetic energy T includes the energyTp of the mobile platform, Tl of the curved links andTs of the slide units:
• The kinetic energy of the mobile platform is
Tp =1
2mpv
Tp vp +
1
2ωT Ipω (24)
with
vp = R cosβp× ω, Ip = diag [Ixx Iyy Izz] (25)
where mp is the mass of the mobile-platform andIxx, Iyy, Izz are the mass moments of inertia of themobile-platform about x-, y-, z-axes, respectively.
• The kinetic energy of the curved links is
Tl =1
2
3∑i=1
(mlv
iT
l vil + Ilψ̇
2i
)(26)
with
vil =1
2R(θ̇iwi × ui + vi × ω
)(27a)
Il =1
2mlR
2
(1− sinα2 cosα2
α2
)(27b)
ψ̇i = −(ui × vi) · ω(ui ×wi) · vi
= jψi · ω (27c)
where ml is the link mass and Il is its mass mo-ment of inertia about wi.
• The kinetic energy of the slide units is
Ts =1
2
(Ign
2g +msR
2s
)θ̇T θ̇ (28)
where ms is the mass of the slide unit and Rs isthe distance from its mass center to z-axis. Ig isthe mass moment of inertia of the pinion and ngis the gear ratio.
Consequently, the SPM kinetic energy can be writtenin the following form
T = Tp + Tl + Ts =1
2θ̇TMθ̇ (29)
Figure 4: The representation of the regular workspacefor the SPM with a pointing cone.
with the mass matrix M of the system is expressed as
M =
(msR
2s + Ign
2g +
1
4mlR
2 sin2 α1
)13
+ JT(Ip +mpR
2 cos2 β[p]T×[p]×
+1
4mlR
23∑i=1
[vi]T×[vi]× + Il
3∑i=1
jψijTψi
)J (30)
where [·]× stands for the skew-symmetric matrix whoseelements are from the corresponding vector and 13 isthe Identity matrix.
4 Design Optimization of theSpherical Parallel Manipulator
The inverse kinematic problem of the SPM can haveup to eight solutions, i.e., the SPM can have up toeight working modes. Here, the diagonal terms bi ofthe inverse Jacobian matrix B are supposed to be allnegative for the SPM to stay in a given working mode.In the optimization procedure, criteria involving kine-matic and kinetostatic/dynamic performances are con-sidered to determine the mechanism configuration andthe dimension and mass properties of the links. More-over, the performances are evaluated over a regularshaped workspace free of singularity, which is speci-fied as a minimum pointing cone of 90o opening with
116
-
G. Wu, “Multiobjective optimization of spherical parallel manipulator”
Figure 5: Design variables of the 3-RRR SPM.
360o full rotation, i.e., θ ≥ 45o and σ ∈ (−180o, 180o],see Figure 4.
4.1 Design variables
Variables α1, α2, β and γ are part of the geometricparameters of a 3-RRR SPM and γ = 0 for the ma-nipulator under study. Moreover, the radius R of thelink midcurve is another design variable and the crosssection of the links is supposed to be a square of sidelength a. These variables are shown in Figure 5. As aconsequence, the design variable vector is expressed asfollows:
x = [α1, α2, β, a, R] (31)
4.2 Objective functions
The kinematic performance is one of the major con-cerns in the manipulator design, of which a criterionis the evaluation of the dexterity of SPMs. A com-monly used criterion to evaluate this kinematic per-formance is the global conditioning index (GCI) (Gos-selin and Angeles, 1991), which describes the isotropyof the kinematic performance. The GCI is defined overa workspace Ω as
GCI =
∫Ωκ−1(J)dW∫
ΩdW
(32)
where κ(J) is the condition number of the kinematicJacobian matrix (11). In practice, the GCI of a robotic
manipulator is calculated through a discrete approachas
GCI =1
n
n∑i=1
1
κi(J)(33)
where n is the number of the discrete workspace points.As a result, the first objective function of the optimiza-tion problem is written as:
f1(x) = GCI → max (34)
Referring to the kinematic dexterity, an importantcriterion to evaluate the dynamic performance is dy-namic dexterity, which is made on the basis of theconcept of Generalized Inertia Ellipsoid (GIE) (Asada,1983). In order to enhance the dynamic performanceand to make acceleration isotropic, the mass ma-trix (30) should be optimized to obtain a better dy-namic dexterity. Similar to GCI, a global dynamic in-dex (GDI) is used to evaluate the dynamic dexterity,namely,
GDI =1
n
n∑i=1
1
κi(M)(35)
where κi(M) is the condition number of the mass ma-trix of the ith workspace point. Thus, the second ob-jective function of the optimization problem is writtenas:
f2(x) = GDI → max (36)
4.3 Optimization constraints
In this section, the kinematic constraints, condition-ing of the kinematic Jacobian matrix and accuraciesdue to the elastic deformation are considered. Con-straining the conditioning of the Jacobian matrix aimsto guarantee dexterous workspace free of singularity,whereas limits on accuracy consideration ensures thatthe mechanism is sufficiently stiff.
4.3.1 Kinematic constraints
According to the determination of design space re-ported in (Bai, 2010), the bounds of the parameterα1, α2 and β subject to the prescribed workspace arestated as:
45o ≤ β ≤ 90o, 45o ≤ α1, α2 ≤ 135o (37)
The sequence of the first, second and third slide unitsappearing on the circular guide counterclockwise isconstant. In order to avoid collision, the angles θij be-tween the projections of vectors wi and wj in the xyquadrant, i, j = 1, 2, 3, i 6= j, as shown in Figure 6,have the minimum value, say 10o. To avoid collision
117
-
Modeling, Identification and Control
Figure 6: Slide unit configuration of the 3-DOF SPM.
and make the mechanism compact, the following con-straints should be satisfied:
θ12, θ23, θ31 ≥ �θ = 10o (38)R0 = 0.120 m ≤ R sinα1 ≤ Rs = 0.200 m
Moreover, the SPM should not reach any singularityin its orientation workspace. Therefore, the followingconditions should be satisfied.
det(A) ≥ �, bi = (ui ×wi) · vi ≤ −� (39)
where A is the forward Jacobian matrix of the manip-ulator defined in Eqn. (9) and � > 0 is a previouslyspecified tolerance set to 0.001.
4.3.2 Conditioning number of the kinematicJacobian matrix
Maximizing the GCI and constraining the kine-matic Jacobian matrix cannot prevent the prescribedworkspace away from ill-conditioned configurations.For the design optimization in order to achieve a dex-terous workspace, the minimum of the inverse condi-tion number of the kinematic Jacobian matrix κ−1(J),based on 2-norm, should be higher than a prescribedvalue throughout the workspace, say 0.1, namely,
min(κ−1(J)) ≥ 0.1 (40)
4.3.3 Accuracy constraints
The accuracy constraints of the optimization prob-lem for the SPM are related to the dimensions of
Table 1: The lower and upper bounds of the designvariables x.
α1 [deg] α2 [deg] β [deg] a [m] R [m]xlb 45 45 45 0.005 0.120xub 135 135 90 0.030 0.300
the curved link and the maximum positional deflec-tion of the rotation center and angular deflection ofthe moving-platform subject to a given wrench appliedon the latter. The control loop stiffness is Kiact =106 Nm/rad. Let the static wrench capability be spec-ified as the eight possible combinations of momentsm = [±10, ±10, ±10] Nm, while the allowable maxi-mum positional and rotational errors for the workspacepoints are 1 mm and 2o = 0.0349 rad, respectively,thus, the accuracy constraints can be written as:
‖∆p‖n =√
∆x2n + ∆y2n + ∆z
2n ≤ �p (41)
‖∆φ‖n =√
∆φ2x, n + ∆φ2y, n + ∆φ
2z, n ≤ �r
where the linear and angular displacements are com-puted from $O = K
−1f with the Cartesian stiffnessmatrix (23) and �p = 1 mm, �r = 0.0349 rad.
4.4 Formulation of the multiobjectiveoptimization problem
Mathematically, the multi-objective design optimiza-tion problem for the spherical parallel manipulator canbe formulated as:
maximize f1(x) = GCI (42)
maximize f2(x) = GDI
over x = [α1, α2, β, a, R]
subject to g1 : θ ≥ 45o
g2 : R0 ≤ R sinα1 ≤ Rsg3 : θ12, θ23, θ31 ≥ �θ = 10o
g4 : det(A) ≥ �, (ui ×wi) · vi ≤ −�g5 : min(κ
−1(J)) ≥ 0.1
g6 :√
∆x2n + ∆y2n + ∆z
2n ≤ �p
g7 :√
∆φ2x, n + ∆φ2y, n + ∆φ
2z, n ≤ �r
xlb ≤ x ≤ xubi = 1, 2, 3
where xlb and xub, respectively, are the lower and up-per bounds of the variables x given by Table 1.
118
-
G. Wu, “Multiobjective optimization of spherical parallel manipulator”
Table 2: Algorithm parameters of the implemented NSGA-II
Population Generation Directional crossover Crossover Mutation Distributionsize probability probability probability index40 200 0.5 0.9 0.1 20
Table 3: Three Pareto-optimal solutions
Design Variables ObjectivesID α1 [deg] α2 [deg] β [deg] a [m] R [m] GCI GDII 56.2 81.0 89.8 0.0128 0.1445 0.366 0.711II 51.6 84.3 89.9 0.0133 0.1533 0.453 0.665III 47.2 90.8 89.2 0.0127 0.1641 0.536 0.625
4.5 Pareto-optimal solutions
For the proposed SPM, the actuation transmissionmechanism is a combination of actuator of modelRE 35 GB and gearhead of model GP 42 C fromMaxon (Maxon, 2012) and a set of gear ring-pinionwith ratio ng = 8. Moreover, the components are sup-posed to be made of steel, thus, E = 210 Gpa, ν = 0.3.Moreover, the moving platform is supposed to be a reg-ular triangle, thus, the MP and link masses are givenby
mp =3√
3
4ρhR2 sin2 β, ml = ρa
2Rα2 (43)
where ρ is the mass density and h = 0.006 m is thethickness of the moving platform. The total mass msof each slide unit, including the mass of the actuator,gearhead, pinion and the manufactured components, isequal to ms = 2.1 kg.
The previous formulated optimization problem (42)is solved by the genetic algorithm NSGA-II (Deb et al.,2002) with Matlab, of which the algorithm parametersare given in Table 2.
The Pareto front of the formulated optimizationproblem for the SPM is shown in Figure 7 and threeoptimal solutions, i.e., two extreme and one intermedi-ate, are listed in Table 3.
Figure 8 illustrates the variational trends as well asthe inter-dependency between the objective functionsand design variables by means of a scatter matrix. Thelower triangular part of the matrix represents the cor-relation coefficients whereas the upper one shows thecorresponding scatter plots. The diagonal elementsrepresent the probability density charts of each vari-able. The correlation coefficients vary from −1 to 1.Two variables are strongly dependent when their cor-relation coefficient is close to −1 or 1 and independentwhen the latter is null. Figure 8 shows:
• both objectives functions GCI and GDI are
0.35 0.4 0.45 0.5 0.550.62
0.63
0.64
0.65
0.66
0.67
0.68
0.69
0.7
0.71
0.72
ID I
ID II
ID III
Kinematic dexterity
Dyn
amic
dex
terit
y
Figure 7: The Pareto front of the multiobjective opti-mization problem for the SPM.
strongly dependent as their correlation coefficientis equal to −0.975;
• both objectives functions GCI and GDI arestrongly dependent on all design variables as allof the corresponding correlation coefficients aregreater than 0.6;
• GCI is slightly more dependent than GDI of thedesign variables as all the corresponding correla-tion coefficients of former are greater than thoseof latter;
• GDI is less dependent on the design variables βand a than the other variables although the twoformer variables influence the SPM mass, this isdue to the large portion of the slide unit mass inthe total mechanism mass.
119
-
Modeling, Identification and Control
Figure 8: Scatter matrix for the objective functions and the design variables.
0.35 0.4 0.45 0.5 0.5540
60
80
100
Var
iabl
es [d
eg]
Kinematic dexterity GCI
α1
α2
β
0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.7 0.71 0.7240
60
80
100
Var
iabl
es [d
eg]
Dynamic dexterity GDI
α1
α2
β
0.62 0.63 0.64 0.65 0.66 0.67 0.68 0.69 0.7 0.71 0.720.1
0.12
0.14
0.16
0.18
Var
iabl
es [m
]
Dynamic dexterity GDI
10*aR
Figure 9: Design variables as functions of objectives forthe Pareto-optimal solutions.
Figure 9 displays the design variables as functionsof the objectives. It is noteworthy that the higherGCI, the lower α1, conversely, the higher GDI, thehigher α1. This phenomenon is opposite with respectto variable α2. The design variable β converges to 90
o
approximately, which indicates that β = 90o is the pre-ferred geometric parameter for the SPM under study.The lower link midcurve R and higher a lead to higherGDI. The three sets of of design variables correspond-ing to the three Pareto-optimal solutions depicted inTable 3 are shown in Figure 9 with solid markers.
5 Conclusions
In this paper, the geometric synthesis of spherical par-allel manipulators is discussed. A multiobjective de-sign optimization problem based on the genetic algo-rithm was formulated in order to determine the mech-anism optimum structural and geometric parameters.The objective functions were defined on the basis of thecriteria of both kinematic and kinetostatic/dynamicperformances. This approach is illustrated with theoptimum design of an unlimited-roll spherical parallelmanipulator, aiming at maximizing the kinematic anddynamic dexterities to achieve relatively better kine-matic and dynamic performances simultaneously. It isfound that the parameter β being equal to 90o is a pre-ferred structure for the SPM under study. Finally, thePareto-front was obtained to show the approximationof the optimal solutions between the various (antago-nistic) criteria, subject to the dependency of the per-formance. The future work will aim to maximize theorientation workspace and optimize the cross-sectiontype of the curved links.
References
Altuzarra, O., Salgado, O., Hernandez, A., andAngeles, J. Multiobjective optimum design ofa symmetric parallel schönflies-motion generator.
120
-
G. Wu, “Multiobjective optimization of spherical parallel manipulator”
ASME J. Mechanical Design, 2009. 131(3):031002.doi:10.1115/1.3066659.
Asada, H. A geometrical representation of manipu-lator dynamics and its application to arm design.ASME J. Dynamic Systems, Measurement and Con-trol, 1983. 105(3):131–142. doi:10.1115/1.3140644.
Asada, H. and Granito, J. Kinematic and staticcharacterization of wrist joints and their opti-mal design. In IEEE International Conferenceon Robotics and Automation. pages 244–250, 1985.doi:10.1109/ROBOT.1985.1087324.
Bai, S. Optimum design of spherical parallel ma-nipulator for a prescribed workspace. Mecha-nism and Machine Theory, 2010. 45(2):200–211.doi:10.1016/j.mechmachtheory.2009.06.007.
Bai, S., Hansen, M. R., and Andersen, T. O. Modellingof a special class of spherical parallel manipulatorswith Euler parameters. Robotica, 2009. 27(2):161–170. doi:10.1017/S0263574708004402.
Bonev, I. A. Direct kinematics of zero-torsionparallel mechanisms. In IEEE InternationalConference on Robotics and Automation.Pasadena, California, USA, pages 3851–3856,2008. doi:10.1109/ROBOT.2008.4543802.
Bonev, I. A. and Gosselin, C. M. Analyti-cal determination of the workspace of symmetri-cal spherical parallel mechanisms. IEEE Trans-actions on Robotics, 2006. 22(5):1011–1017.doi:10.1109/TRO.2006.878983.
Caro, S., Chablat, D., Ur-Rehman, R., and Wenger, P.Multiobjective design optimization of 3-PRR planarparallel manipulators. In Global Product Develop-ment, pages 373–383. Springer-Verlag Berlin Heidel-berg, 2011. doi:10.1007/978-3-642-15973-2 37.
Cavallo, E. and Michelini, R. C. A robotic equipmentfor the guidance of a vectored thrustor. In 35th In-ternational Symposium on Robotics. Paris, France,2004.
Ceccarelli, M., Carbone, G., and Ottaviano, E. Multicriteria optimum design of manipulators. In Bulletinof the Polish Academy of Technical Sciences, 2005.53(1):9–18.
Chaker, A., Mlika, A., Laribi, M. A., Romdhane,L., and Zeghloul, S. Synthesis of spherical paral-lel manipulator for dexterous medical task. Fron-tiers of Mechanical Engineering, 2012. 7(2):150–162.doi:10.1007/s11465-012-0325-4.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T.A fast and elitist multiobjective genetic algorithm:NSGA-II. IEEE Trans. Evolutionary Computation,2002. 6(2):182–197. doi:10.1109/4235.996017.
Durand, S. L. and Reboulet, C. Optimaldesign of a redundant spherical parallel ma-nipulator. Robotica, 1997. 15(4):399–405.doi:10.1017/S0263574797000490.
Gosselin, C. M. and Angeles, J. The optimum kine-matic design of a spherical three-degree-of-freedomparallel manipulator. ASME J. Mechanisms, Trans-missions, and Automation in Design, 1989. 111:202–207. doi:10.1115/1.3258984.
Gosselin, C. M. and Angeles, J. A global performanceindex for the kinematic optimization of robotic ma-nipulators. ASME J. Mechanical Design, 1991.113(3):220–226. doi:10.1115/1.2912772.
Gosselin, C. M. and Hamel, J. F. The Agile Eye:a high-performance three-degree-of-freedom camera-orienting device. In IEEE International Conferenceon Robotics and Automation. San Diego, CA, pages781–786, 1994. doi:10.1109/ROBOT.1994.351393.
Hao, F. and Merlet, J.-P. Multi-criteria optimal designof parallel manipulators based on interval analysis.Mechanism and Machine Theory, 2005. 40(2):157–171. doi:10.1016/j.mechmachtheory.2004.07.002.
Hay, A. M. and Snyman, J. A. Methodologies forthe optimal design of parallel manipulators. In-ter. J. Numerical Methods in Engineering, 2004.59(11):131–152. doi:10.1002/nme.871.
Hibbeler, R. C. Mechanics of Materials. Prentice Hall,1997.
Huang, T., Gosselin, C. M., Whitehouse, D. J., andChetwynd, D. G. Analytic approach for optimaldesign of a type of spherical parallel manipula-tors using dexterous performance indices. IMechE.J. Mechan. Eng. Sci., 2003. 217(4):447–455.doi:10.1243/095440603321509720.
Kong, K. and Gosselin, C. M. Type synthesis ofthree-degree-of-freedom spherical parallel manipula-tors. Inter. J. Robotics Research, 2004. 23(3):237–245. doi:10.1177/0278364904041562.
Krefft, M. and Hesselbach, J. Elastodynamicoptimization of parallel kinematics. In Pro-ceedings of the IEEE International Conferenceon Automation Science and Engineering. Ed-monton, AB, Canada, pages 357–362, 2005.doi:10.1109/COASE.2005.1506795.
121
http://dx.doi.org/10.1115/1.3066659http://dx.doi.org/10.1115/1.3140644http://dx.doi.org/10.1109/ROBOT.1985.1087324http://dx.doi.org/10.1016/j.mechmachtheory.2009.06.007http://dx.doi.org/10.1017/S0263574708004402http://dx.doi.org/10.1109/ROBOT.2008.4543802http://dx.doi.org/10.1109/TRO.2006.878983http://dx.doi.org/10.1007/978-3-642-15973-2_37http://dx.doi.org/10.1007/s11465-012-0325-4http://dx.doi.org/10.1109/4235.996017http://dx.doi.org/10.1017/S0263574797000490http://dx.doi.org/10.1115/1.3258984http://dx.doi.org/10.1115/1.2912772http://dx.doi.org/10.1109/ROBOT.1994.351393http://dx.doi.org/10.1016/j.mechmachtheory.2004.07.002http://dx.doi.org/10.1002/nme.871http://dx.doi.org/10.1243/095440603321509720http://dx.doi.org/10.1177/0278364904041562http://dx.doi.org/10.1109/COASE.2005.1506795
-
Modeling, Identification and Control
Li, T. and Payandeh, S. Design of sphericalparallel mechanisms for application to laparo-scopic surgery. Robotica, 2002. 20(2):133–138.doi:10.1017/S0263574701003873.
Liu, X. J., Jin, Z. L., and Gao, F. Optimum designof 3-dof spherical parallel manipulators with respectto the conditioning and stiffness indices. Mecha-nism and Machine Theory, 2000. 35(9):1257–1267.doi:10.1016/S0094-114X(99)00072-5.
Lou, Y., Liu, G., Chen, N., and Li, Z. Optimaldesign of parallel manipulators for maximum ef-fective regular workspace. In Proceedings of theIEEE/RSJ International Conference on IntelligentRobots and Systems. Alberta, pages 795–800, 2005.doi:10.1109/IROS.2005.1545144.
Maxon. Maxon Motor and Gearhead products catalog.2012. URL http://www.maxonmotor.com/maxon/view/catalog/.
Merlet, J.-P. Jacobian, manipulability, conditionnumber, and accuracy of parallel robots. ASMEJ. Mechanical Design, 2006a. 128(1):199–206.doi:10.1115/1.2121740.
Merlet, J.-P. Parallel Robots. Kluwer, Norwell, 2006b.
Pashkevich, A., Chablat, D., and Wenger, P. Stiffnessanalysis of overconstrained parallel manipulators.Mechanism and Machine Theory, 2009. 44(5):966–982. doi:10.1016/j.mechmachtheory.2008.05.017.
Stamper, R. E., Tsai, L.-W., and Walsh, G. C. Op-timization of a three-dof translational platform forwell-conditioned workspace. In Proceedings of theIEEE International Conference on Robotics and Au-tomation. Albuquerque, NM, pages 3250–3255, 1997.doi:10.1109/ROBOT.1997.606784.
Stock, M. and Miller, K. Optimal kinematic designof spatial parallel manipulators: Application of lin-ear delta robot. ASME J. Mechanical Design, 2003.125(2):292–301. doi:10.1115/1.1563632.
Tsai, L.-W. The Jacobian analysis of parallel manip-ulators using reciprocal screws. In J. Lenarčic̆ andM. L. Husty, editors, Advances in Robot Kinemat-ics: Analysis and Control, pages 327–336. KluwerAcademic Publishers, 1998.
Appendix A
The elements of the compliance matrix (21) for thecurved beam
C11 =R
2
(s1GIx
+s2EIy
)(A-1a)
C12 =s8R
2
(1
GIx− 1EIy
)(A-1b)
C16 =R2
2
(s2EIy
− s7GIx
)(A-1c)
C22 =R
2
(s2GIx
+s1EIy
)(A-1d)
C26 =R2
2
(s4GIx
− s2EIy
)(A-1e)
C33 =Rα2EIz
(A-1f)
C34 =s5R
2
EIz(A-1g)
C35 =s6R
2
EIz(A-1h)
C44 =R
2A
(s1E
+s2G
)+s3R
3
2EIz(A-1i)
C45 =s8R
2A
(1
E− 1G
)+s4R
3
2EIz(A-1j)
C55 =R
2A
(s1G
+s2E
)+s2R
3
2EIz(A-1k)
C66 =Rα2GA
+R3
2
(s3GIx
+s2EIy
)(A-1l)
with
s1 = α2 + sinα2 cosα2 (A-2a)
s2 = α2 − sinα2 cosα2 (A-2b)s3 = 3α2 + sinα2 cosα2/2− 4 sinα2 (A-2c)s4 = 1− cosα2 − sin2 α2/2 (A-2d)s5 = sinα2 − α2 (A-2e)s6 = cosα2 − 1 (A-2f)s7 = 2 sinα2 − α2 − sinα2 cosα2 (A-2g)s8 = − sin2 α2 (A-2h)
where E is the Young’s modulus and G = E/2(1 + ν)is the shear modulus with the Poisson’s ratio ν. Ix, Iyand Iz are the moments of inertia, respectively. A isthe area of the cross-section.
122
http://dx.doi.org/10.1017/S0263574701003873http://dx.doi.org/10.1016/S0094-114X(99)00072-5http://dx.doi.org/10.1109/IROS.2005.1545144http://www.maxonmotor.com/maxon/view/catalog/http://www.maxonmotor.com/maxon/view/catalog/http://dx.doi.org/10.1115/1.2121740http://dx.doi.org/10.1016/j.mechmachtheory.2008.05.017http://dx.doi.org/10.1109/ROBOT.1997.606784http://dx.doi.org/10.1115/1.1563632http://creativecommons.org/licenses/by/3.0
IntroductionManipulator ArchitectureKinematic and Kinetostatic Modeling of the SPMKinematic Jacobian matrixCartesian stiffness matrixMass matrix
Design Optimization of the Spherical Parallel ManipulatorDesign variablesObjective functionsOptimization constraintsKinematic constraintsConditioning number of the kinematic Jacobian matrixAccuracy constraints
Formulation of the multiobjective optimization problemPareto-optimal solutions
Conclusions
Related Documents