MULTI-OBJECTIVE SLIDING MODE CONTROL OF ACTIVE MAGNETIC BEARING SYSTEM ABDUL RASHID BIN HUSAIN A thesis submitted in fulfilment of the requirements for the award of the degree of Doctor of Philosophy (Electrical Engineering) Faculty of Electrical Engineering Universiti Teknologi Malaysia JULY 2009

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MULTI-OBJECTIVE SLIDING MODE CONTROL OF ACTIVE MAGNETIC BEARING SYSTEM
ABDUL RASHID BIN HUSAIN
A thesis submitted in fulfilment of the
requirements for the award of the degree of
Doctor of Philosophy (Electrical Engineering)
Faculty of Electrical Engineering
Universiti Teknologi Malaysia
JULY 2009

ii
I declare that this thesis entitled “Multi-Objective Sliding Mode Control of Active
Magnetic Bearing System” is the result of my own research except as cited in the
references. The thesis has not been accepted for any other degree and is not
concurrently submitted in candidature of any other degree.
Signature : ………………………………
Name : ABDUL RASHID HUSAIN
Date : 23 JULY 2009

iii
DEDICATION To my dearest parents for their love and blessing.
To my dearly beloved wife, Norazah Abd Aziz for her support and encouragement.
To my son, Muhammad Ammar for making my life beautiful.

iv
ACKNOWLEDGEMENT
“In the name of Allah, The Most Gracious The Most Merciful”
I would like to express my sincere appreciation to my main supervisor Assoc. Prof. Dr. Mohamad Noh Ahmad for his guidance, supervision, advice and assistance in this research and preparation of this thesis. All the ‘teh tarik’ chats and discussions will definitely be one of the nicest memories to remember. My deepest gratituity also goes to my second supervisor, Prof. Ir. Dr. Abdul Halim Mohd. Yatim for his ideas especially during the initial stage of this research.
I am also very much indebted to Prof. Dr. Abdul Fatah Mohamad of Assiut
University, Egypt for helping and guiding me on the modeling of the Active Magnetic Bearing System and Dr. Tan Chee Pin of Monash University Malaysia for helping me in Sliding Mode Theory and Linear Matrix Inequality (LMI) when I first started. Also, I would like to thank Dr. Didier Henrion of LARS-CNRS, Toulouse, France for introducing me with the advance LMI materials and the LMI solver, YALMIP/SeDuMi, and Dr. Jiangfeng Zhang of University of Pretoria, South Africa for his very creative and nice explanation on linear system theory. I also would like to thank two gurus in Sliding Mode Control (SMC) theory, Prof. Okyay Kaynak of Bogazici University, Turkey and Dr. Christopher Edwards of University of Leicester, UK for very informative explanation of SMC and its research trend, and Prof. Ben Chen of National University of Singapore for sharing many of his knowledge on linear system theory. My appreciation also goes to Prof. Dr. Johari Halim Shah Osman for many informal discussions yet very fruitful.
I would like to thank my ‘phd-twin’, Sophan Wahyudi Nawawi for being my
research partner, Musa Mokji for giving many tips in using MATLAB, See Siew Min for the being the first person to introduce the LMI theory to me, and Tan Jo Lynn and Usman Ullah Sheikh for finding the ‘FOC’ journal articles.
I am also grateful to Universiti Teknologi Malaysia (UTM), my employer for
supporting this research in the form of scholarship and study leave. Last but never least, my beloved wife, Norazah Abd Aziz, for her love,
patience, understanding and unwavering support and to my wonderful son, Muhammad Ammar for cheering up my day.

v
ABSTRACT
Active Magnetic Bearing (AMB) system is known to inherit many nonlinearity effects due to its rotor dynamic motion and the electromagnetic actuators which make the system highly nonlinear, coupled and open-loop unstable. The major nonlinearities that are associated with AMB system are gyroscopic effect, rotor mass imbalance and nonlinear electromagnetics in which the gyroscopics and imbalance are dependent to the rotational speed of the rotor. In order to provide satisfactory system performance for a wide range of system condition, active control is thus essential. The main concern of the thesis is the modeling of the nonlinear AMB system and synthesizing a robust control method based on Sliding Mode Control (SMC) technique such that the system can achieve robust performance under various system nonlinearities. The model of the AMB system is developed based on the integration of the rotor and electromagnetic dynamics which forms nonlinear time varying state equations that represent a reasonably close description of the actual system. Based on the known bound of the system parameters and state variables, the model is restructured to become a class of uncertain system by using a deterministic approach. In formulating the control algorithm to control the system, SMC theory is adapted which involves the formulation of the sliding surface and the control law such that the state trajectories are driven to the stable sliding manifold. The surface design involves the transformation of the system into a special canonical representation such that the sliding motion can be characterized by a convex representation of the desired system performances. Optimal Linear Quadratic (LQ) characteristics and regional pole-clustering of the closed-loop poles are designed to be the objectives to be fulfilled in the surface design where the formulation is represented as a set of Linear Matrix Inequality optimization problem. For the control law design, a new continuous SMC controller is proposed in which asymptotic convergence of the system’s state trajectories in finite time is guaranteed. This is achieved by adapting the equivalent control approach with the exponential decaying boundary layer technique. The newly designed sliding surface and control law form the complete Multi-objective SMC (MO-SMC) and the proposed algorithm is applied into the nonlinear AMB in which the results show that robust system performance is achieved for various system conditions. The findings also demonstrate that the MO-SMC gives better system response than the reported ideal SMC (I-SMC) and continuous SMC (C-SMC).

vi
ABSTRAK
Sistem bearing magnet aktif (AMB) diketahui mempunyai pelbagai pengaruh kesan ketaklinearan disebabkan oleh pergerakan dinamik rotor dan penggerak sistem elektromagnet yang telah menyebabkan sistem ini mengalami ketaklinearan yang tinggi, terganding dan tidak stabil dalam kawalan gelung terbuka. Faktor penyumbang utama kepada ketaklinearan ini dikaitkan dengan kesan giroskopik, ketidakseimbangan berat rotor dan ketaklinearan elektromagnet di mana kesan giroskopik dan ketakseimbangan berat rotor adalah berkadar terus dengan kelajuan putaran rotor. Untuk mendapatkan sambutan sistem yang memuaskan dalam julat operasi sistem yang luas, kawalan aktif adalah diperlukan. Tesis ini membincangkan permodelan sistem AMB yang tak linear dan pembangunan pengawal tegap berasaskan kawalan ragam gelincir (SMC) di mana sistem yang dikawal akan mencapai prestasi tegap dalam pelbagai ketaklinearan sistem. Model AMB yang dibangunkan ini adalah berdasarkan integrasi antara dinamik rotor dan elektromagnet. Persamaan tak linear tersebut adalah berubah dengan masa dan persamaan ini mewakili penghampiran kepada ciri sistem yang sebenar. Berdasarkan kepada batasan parameter sistem yang diketahui, model ini distrukturkan semula menjadi satu kelas sistem tak pasti menggunakan pendekatan secara deterministik. Dalam membangunkan algoritma kawalan untuk mengawal sistem tersebut, teori kawalan ragam gelincir telah digunakan di mana kaedah ini melibatkan rekabentuk permukaan gelincir dan juga pembangunan hukum kawalan yang boleh memastikan trajektori sistem terpacu ke arah permukaan gelincir yang stabil. Rekabentuk permukaan gelincir melibatkan penukaran sistem kepada satu bentuk berkanun khas di mana pergerakan gelincir boleh diwakilkan oleh perwakilan cembung yang merangkumi prestasi sistem yang dikehendaki. Kuadratik Linear (LQ) optimum dan kawasan gugusan kutub yang dihasilkan dari kawalan gelung tertutup adalah objektif-objektif yang perlu dipenuhi dalam rekabentuk permukaan gelincir di mana ianya boleh diwakili sebagai satu set permasalahan pengoptimuman Ketaksamaan Matrik Linear. Untuk rekabentuk hukum kawalan, satu pengawal ragam gelincir berterusan yang baru telah dicadangkan. Hukum kawalan ini dapat menjamin sistem trajektori sampai ke kawasan kestabilan asimptot dalam satu masa yang terhingga. Ini dapat dicapai dengan menggunakan teknik kawalan setara yang digabungkan dengan lapisan sempadan yang menurun secara eksponen. Permukaan gelincir dan hukum kawalan yang baru dibangunkan ini membentuk pengawal kawalan ragam gelincir berbilang objektif (MO-SMC) lengkap. Pengawal ini kemudian diaplikasikan kepada sistem AMB tak linear di dalam pelbagai keadaan dan prestasi sistem secara tegap telah terbukti tercapai. Penemuan ini juga menunjukkan bahawa MO-SMC menghasilkan sambutan sistem yang lebih baik berbanding dengan teknik kawalan lain yang sedia ada iaitu kawalan ragam gelincir unggul (I-SMC) dan kawalan ragam gelincir berterusan (C-SMC).

vii
TABLE OF CONTENT
CHAPTER TITLE PAGE
DECLARATION ii
DEDICATION iii
ACKNOWLEDGEMENT iv
ABSTRACT v
ABSTRAK vi
TABLE OF CONTENTS vii
LIST OF TABLES x
LIST OF FIGURES xi
LIST OF SYMBOLS xv
LIST OF ABBREVIATIONS xxiii
LIST OF APPENDICES xxv
1 INTRODUCTION 1
1.1 Introduction to Active Magnetic Bearing (AMB)
System
1
1.2 AMB System Configurations and Control
Strategies
9
1.3 Summary of Existing Control Method for AMB
System
36
1.4 Research Objectives 37
1.5 Contributions of the Research Work 38
1.6 Structure and Layout of Thesis 39

viii
2 MODELLING OF ACTIVE MAGNETIC BEARING
SYSTEM
41
2.1 Introduction 41
2.2 Rotor Dynamic Model 42
2.3 Electromagnetic Equations 54
2.4 AMB System as an Integrated Model 55
2.5 AMB Model as Uncertain System 62
2.6 Summary 65
3 MULTI-OBJECTIVE SLIDING MODE CONTROL 67
3.1 Introduction 67
3.2 Problem Formulation 76
3.3 Multi-objective Sliding Surface 81
3.3.1 Optimal Quadratic Performance 82
3.3.2 Robust Constraint Pole-placement in
Convex LMI Region
89
3.3.3 Solution of Multiple Criteria using Convex
LMI
94
3.4 Sliding Mode Control Law Design 95
3.4.1 Fast-reaching Sliding Mode Design 96
3.4.2 Chattering Eliminations Using Continuous
Exponential Time-varying Boundary
Layer
100
3.5 The Proposed Controller Design Algorithm 103
3.6 Summary 106
4 SIMULATION RESULTS AND DISCUSSION 107
4.1 Introduction 107
4.2 Simulation Set-up and System Configuration 108
4.3 Simulation Results of the Multi-objective Sliding
Mode Control
112

ix
4.3.1 Multi-objective Sliding Surface 113
4.3.1.1 Effect of and Design
Matrices
114
4.3.1.2 Effect of Design Parameter, 139
4.3.1.3 Effect of Design Parameter,
, and
142
4.3.2 Surface Parameterization with Optimal
Quadratic Performance
144
4.3.3 Surface Parameterization with Robust
Constraint of Pole-placement in LMI
Region
147
4.4 The Effect of Design Parameter, , on System
Performance
150
4.5 The Effect of Design Parameter, and , on
Chattering Elimination
152
4.6 The Effect of Bias Current, Ib, on System
Performance
155
4.7 Comparison Between the Multi-objectives Sliding
Mode Controller with Ideal Sliding Mode
Controller and Continuous Sliding Mode
Controller
157
4.8 Summary 165
5 CONCLUSION AND SUGGESTIONS 167
5.1 Conclusion 167
5.2 Recommendation of Future Works 169
LIST OF PUBLICATIONS 171
REFERENCES 173
APPENDICES A-C 189-203

x
LIST OF TABLES
TABLE TITLE PAGE
1.1 Mode of operation for a pair of electromagnet 11
2.1 Parameters for AMB system 64
2.2 Range of state variables, input and rotor speed 64
4.1 Various values and the calculated H2 norm 139
4.2 Various c1 values and the calculated H2 norm 142
4.3 Calculated H2 norm and closed-loop eigenvalues for optimal
quadratic sliding surface
145
4.4 Closed-looped eigenvalues for sliding surface with robust
pole-placement constraint
148
4.5 and the power consumption index, Te 153
4.6 Bias current, Ib and power consumption index, Te 155
4.7 Maximum power consumption of AMB for MO-SMC,
I- SMC and C-SMC with the associated controller gains.
158

xi
LIST OF FIGURES
FIGURE TITLE PAGE
1.1 Active Magnetic Bearing System 3
1.2 Configurations of Active Magnetic Bearing System 4
1.3 Nonlinear relationship between magnetic force and
current/airgap
6
1.4 Illustration of unbalance rotor 7
1.5 Hardware configuration for closed-loop control of AMB
system
9
2.1 Cross section view of cylindrical horizontal AMB system
from x-z plane
43
2.2 Free-body diagram of AMB rotor 44
2.3 Movement of rotor in z-axis 52
3.1 Illustration of sliding that exists at intersection of two sliding
surfaces
68
3.2 States trajectory of third-order system given in (Choi, 1998) 69
3.3 Chattering phenomena due to infinite switching control law 70
3.4 LMI region for pole-placement 81
3.5 Representation of feedback system (3.36) 84
4.1 Singular value test of the system in original and transformed
coordinates
109
4.2 Flow charts of simulation preparations and set-up 112
4.3 Trajectories of X1 for parameter Set 1 116
4.4 Trajectories of X2 for parameter Set 1 116
4.5 Trajectories of X3 for parameter Set 1 117
4.6 Trajectories of X4 for parameter Set 1 117

xii
4.7 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 1 118
4.8 Rotor orbit for X2 vs. X4 (left bearing) for parameter Set 1 118
4.9 Control input for parameter Set 1 119
4.10 Control input for parameter Set 1 119
4.11 Control input for parameter Set 1 120
4.12 Control input for parameter Set 1 120
4.13 Sliding surface σ1 for parameter Set 1 121
4.14 Sliding surface σ2 for parameter Set 1 121
4.15 Sliding surface σ3 for parameter Set 1 122
4.16 Sliding surface σ4 for parameter Set 1 122
4.17 Trajectories of X1 for parameter Set 2 124
4.18 Trajectories of X2 for parameter Set 2 124
4.19 Trajectories of X3 for parameter Set 2 125
4.20 Trajectories of X4 for parameter Set 2 125
4.21 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 2 126
4.22 Rotor orbit for X2 vs. X4 (left bearing) for parameter Set 2 126
4.23 Control input for parameter Set 2 127
4.24 Control input for parameter Set 2 127
4.25 Control input for parameter Set 2 128
4.26 Control input for parameter Set 2 128
4.27 Sliding surface σ1 for parameter Set 2 129
4.28 Sliding surface σ2 for parameter Set 2 129
4.29 Sliding surface σ3 for parameter Set 2 130
4.30 Sliding surface σ4 for parameter Set 2 130
4.31 Trajectories of X1 for parameter Set 3 132
4.32 Trajectories of X2 for parameter Set 3 132
4.33 Trajectories of X3 for parameter Set 3 133
4.34 Trajectories of X4 for parameter Set 3 133
4.35 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 3 134
4.36 Rotor orbit for X2 vs. X4 (left bearing) for parameter Set 3 134
4.37 Control input for parameter Set 3 135
4.38 Control input for parameter Set 3 135

xiii
4.39 Control input for parameter Set 3 136
4.40 Control input for parameter Set 3 136
4.41 Sliding surface σ1 for parameter Set 3 137
4.42 Sliding surface σ2 for parameter Set 3 137
4.43 Sliding surface σ3 for parameter Set 3 138
4.44 Sliding surface σ4 for parameter Set 3 138
4.45 Trajectories of X1 (Varying ) 140
4.46 Control input (Varying ) 140
4.47 Sliding surface σ1 (Varying ) 141
4.48 Zoomed view of sliding surface σ1 141
4.49 Trajectories of X1 (Varying c1) 143
4.50 Control input (Varying c1) 143
4.51 Sliding surface σ1 (Varying c1) 144
4.52 Trajectories of X1 with optimal sliding surface 146
4.53 Control input with optimal sliding surface 146
4.54 Sliding surface σ1 with optimal sliding surface 147
4.55 Trajectories of X1 with LMI constraint pole-placement sliding
surface
148
4.56 Control input with LMI constraint pole-placement sliding
surface
149
4.57 Sliding surface σ1 with LMI constraint pole-placement sliding
surface
149
4.58 Trajectories of X1 (Varying ) 151
4.59 Control input (Varying ) 151
4.60 Sliding surface σ1 (Varying ) 152
4.61 Trajectories of X1 (Varying ) 153
4.62 Control input (Varying ) 154
4.63 Sliding surface σ1 (Varying ) 154
4.64 Trajectories of X1 (Varying Ib) 156
4.65 Rotor orbit for X1 vs. X3 (Varying Ib) 156
4.66 Trajectories of X1 of I-SMC, C-SMC and MO-SMC
( )
159

xiv
4.67 Trajectories of X1 of I-SMC, C-SMC and MO-SMC
( )
159
4.68 Trajectories of X2 of I-SMC, C-SMC and MO-SMC
( )
160
4.69 Trajectories of X3 of I-SMC, C-SMC and MO-SMC
( )
160
4.70 Trajectories of X4 of I-SMC, C-SMC and MO-SMC
( )
161
4.71 Control input of I-SMC, C-SMC and MO-SMC 161
4.72 Control input of I-SMC, C-SMC and MO-SMC 162
4.73 Control input of I-SMC, C-SMC and MO-SMC 162
4.74 Control input of I-SMC, C-SMC and MO-SMC 163
4.75 Sliding surface σ1 of I-SMC, C-SMC and MO-SMC 163
4.76 Sliding surface σ2 of I-SMC, C-SMC and MO-SMC 164
4.77 Sliding surface σ3 of I-SMC, C-SMC and MO-SMC 164
4.78 Sliding surface σ4 of I-SMC, C-SMC and MO-SMC 165

xv
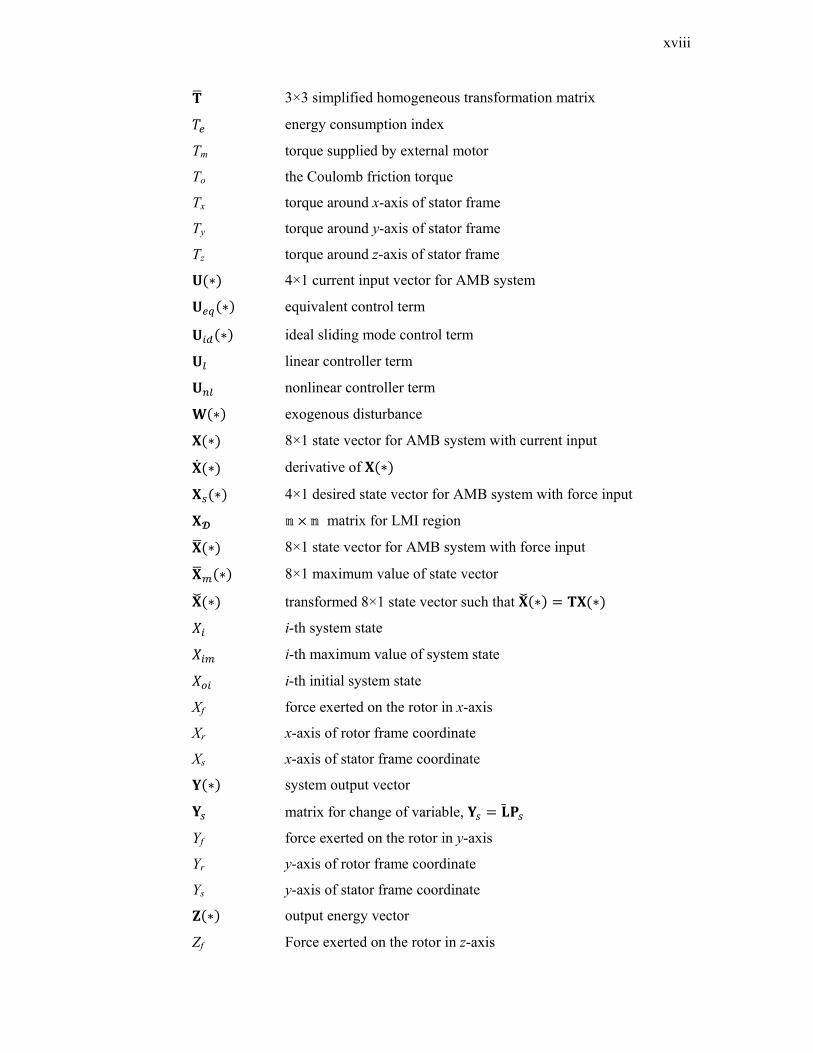
LIST OF SYMBOLS
SYMBOL DESCRIPTION
1. Upper case
effective cross-section area of the airgap
8×8 nominal system matrix of AMB system
, 8×8 system matrix of AMB system with current input
, 8×8 system matrix of AMB system with force input
ΔA(*,*) 8×8 uncertainty in system matrix of AMB system
generalized square matrix
8×8 transformed matrix,
( ( partitioned matrix
( partitioned matrix
( partitioned matrix
partitioned matrix
8×8 nominal linear dynamic matrix in new coordinate system,
8×4 nominal input matrix of AMB system
, , 8×4 input matrix of AMB system with current input
8×4 input matrix of AMB system with force input
nominal linear input matrix in new coordinate system,
coordinate transformation matrix,
∆ , , 8×8 uncertainty in input matrix of AMB system
4×4 state variable transformation matrix

xvi
design matrix related to
field of complex number
, , 8×1 disturbance vector
8×4 disturbance matrix
, , 8×1 disturbance vector containing the upper limit of each vector
element
design matrix related to
stable LMI region
stable LMI region region 1
stable LMI region region 2
steady-state airgap at equilibrium
, , continuous function related to ∆ , ,
, , continuous function related to , ,
4×1 force input vector
Fx net forces acting on the x-axis of stator frame
Fy net forces acting on the y-axis of stator frame
Fz net forces acting on the z-axis of stator frame
G Generalized feedback system dynamic
GXrYrZr moving rotor frame
G rotor center of geometry
Gm rotor center of inertia
, continuous function related to ΔA(*,*)
H2 energy in Hardy space
Ib bias current
Ic controlled current
Ii current in i-th coil
Imax maximum allowable coil current
LQ performance index
new LQ performance index related to output energy
Jx the moment of inertia around Xr
Jy the moment of inertia around Yr
controller parameter determining rate of reaching phase
K electromagnetic constant

xvii
linear controller gain,
transformed linear controller gain,
Lf moment of rotor around x-axis
surface design parameter
LMI block matrix
Mf moment of rotor around y-axis
slack matrix
N number of coil turn
Nf moment of rotor around z-axis
OXsYxZs static stator frame
O stator center of geometry
solution matrix for optimal quadratic surface
solution matrix for robust LMI region
partitioned matrix
partitioned matrix
symmetric positive definite matrix of state vector of LQ cost
function
partitioned matrix of
symmetric positive definite matrix of input vector of LQ
cost function
field of real number
design surface matrix
Sl linear sliding surface matrix
SPI proportional-integral sliding surface matrix
sliding surface matrix for I-SMC
sliding surface matrix for C-SMC
partitioned surface matrix of
partitioned surface matrix of
i-th sliding surface
i-th proportional-integral sliding surface
4×4 homogeneous transformation matrix of frame with respect to
frame 1
Transformation matrix into special regular form
xviii
3×3 simplified homogeneous transformation matrix
energy consumption index
Tm torque supplied by external motor
To the Coulomb friction torque
Tx torque around x-axis of stator frame
Ty torque around y-axis of stator frame
Tz torque around z-axis of stator frame
4×1 current input vector for AMB system
equivalent control term
ideal sliding mode control term
linear controller term
nonlinear controller term
exogenous disturbance
8×1 state vector for AMB system with current input
derivative of
4×1 desired state vector for AMB system with force input
matrix for LMI region
8×1 state vector for AMB system with force input
8×1 maximum value of state vector
transformed 8×1 state vector such that
i-th system state
i-th maximum value of system state
i-th initial system state
Xf force exerted on the rotor in x-axis
Xr x-axis of rotor frame coordinate
Xs x-axis of stator frame coordinate
system output vector
matrix for change of variable,
Yf force exerted on the rotor in y-axis
Yr y-axis of rotor frame coordinate
Ys y-axis of stator frame coordinate
output energy vector
Zf Force exerted on the rotor in z-axis

xix
Zr z-axis of rotor frame coordinate
Zs z-axis of stator frame coordinate
2. Lower case
ij-th element of the nominal matrix
, minimum and maximum bounds of ∆ , , respectively
∆ , ij-th element of the uncertain matrix ΔA(*,*)
ij-th element of the nominal matrix
, minimum and maximum bounds of ∆ , , , respectively
∆ , , ik-th element of the uncertain matrix ∆ , ,
upper limit of real value of eigenvalue in LMI region
lower limit of real value of eigenvalue in LMI region
4×1 disturbance force vector
maximum values of ∆ , ,
∆ , , i-th element of vector , ,
characteristic function of LMI region in complex plane
fdx disturbance force in x-direction
fdy disturbance force in y-direction
fdz disturbance force in z-direction
fdθ disturbance force around pitch angle
fdβ disturbance force around yaw angle
fex unknown external disturbance along x-axis
general electromagnetic force
electromagnetic coil of the ith coil
h electromagnet pole width
4×1 airgap deviation vector
gi airgap length
deviation of airgap
control current for horizontal left of rotor
control current for horizontal right of rotor
control current for vertical left of rotor
control current for vertical right of rotor

xx
electromagnetic constant
positive gain for relay-type control
negative gain for relay-type control
half of rotor length
mass of the rotor
mass of rotor imbalance
dimension of system input vector
dimension of system state vector
angular velocity components around Xr
angular velocity components around Yr
angular velocity components around Zr
bounds on the values ∆ , lis i-th linear sliding surface parameter
PIis i-th proportional-integral sliding surface parameter
bounds on the values
to initial time
reaching time of ideal sliding mode controller
reaching time of the new sliding mode controller
linear velocity components along Xr
linear velocity components along Yr
linear velocity components along Zr
xo initial state vector
x- coordinate of the rotor center relative to stator center
y- coordinate of the rotor center relative to stator center
z- coordinate of the rotor center relative to stator center
3. Greek symbol
matrix of boundary layer thickness for type switching
function
matrix of boundary layer thickness for continuous type switching
function

xxi
matrix of boundary layer thickness for exponential decaying type
switching function
state dependant switch gain matrix
controller design parameter determining reaching phase
sliding surface
sliding surface for C-SMC
sliding surface for I-SMC
, , design LMI region
design matrix for LMI region
design matrix for LMI region
design matrix for chattering elimination
Δ norm bound of continuous function ,
Δ norm bound of continuous function , ,
Δ norm bound of continuous function , ,
Π ij-th element of matrix
boundary layer thickness for C-SMC
design constant for chattering elimination
-th element of matrix
-th element of matrix
ς Angle of conical bearing
design parameter for convergence of exponential sliding surface
design parameter for optimized surface criterion
, , , lumped matched uncertainties
small positive constant for new sliding mode controller
small positive constant for ideal sliding mode controller
norm bound of lumped matched uncertainties
τ inertia inclining angle with respect to Xr (dynamic imbalance)
time variable
μo permeability of free space
κ initial angular values around pitch angle
ℓ bound of LQ performance index
λ initial angular values around yaw angle
eigenvalues of (*)

xxii
θ pitch angle
angle of the LMI region that specified damping factor of
closed-loop system
gain for continuous sliding mode controller
β yaw angle
ρ rotational angle (roll angle)
ζ torque damping coefficient
i-th airgap flux
radial distance of the unbalance mass from center of geometry
static imbalance
rotor radial eccentricity coefficient
rotor axial eccentricity coefficient
axial damping coefficient

xxiii
LIST OF ABBREVIATION
ADC Analog to Digital Converter
AMB Active Magnetic Bearing
CAC Current Almost Complementary
CCC Current Complementary Condition
CCS Constant Current Sum
CFS Constant Flux Sum
C-SMC Continuous Sliding Mode Control
CVS Constant Voltage Sum
DAC Digital to Analog Converter
DIA Disturbance and Initial-state Attenuation
DOF Degree of Freedom
DSP Digital Signal Processor
FEA Finite Element Analysis
FEM Finite Element Method
FL Fuzzy Logic
GA Genetic Algorithm
GEVP Generalized Eigenvalue Problem
IC Intelligent Control
I-SMC Ideal Sliding Mode Control
LDI Linear Differential Inclusion
LFT Linear Fractional Transformation
LMI Linear Matrix Inequality
LPV Linear Parameter Varying
LQ Linear Quadratic
LQR Linear Quadratic Regulator

xxiv
LSDP Loop Shaping Design Procedure
MO-SMC Multi-objective Sliding Mode Control
NN Neural Network
PD Proportional Derivative
PDD Proportional Derivative Derivative
PI Proportional Integral
PID Proportional Integral Derivative
PIDD Proportional Integral Derivative Derivative
SISO Single Input Single Output
SMC Sliding Mode Control
VSC Variable Structure Control
e.m.f Electromotive force
rpm Revolution per minute

xxv
LIST OF APPENDICES
APPENDIX TITLE PAGE
A Essential Theoretical Background 189
A1.1 Optimal State feedback Control 189
A1.2 H2 Norm and H2 Control 190
A1.3 Linear Matrix Inequality (LMI) 192
A1.3.1 LMI Problems 193
A1.3.2 Schur Complement 194
A1.3.3 LMI example 195
B LMI Solver 196
B1.1 Example: LQR for DC Motor Control and the
controller gains using ‘lqr’ and ‘are’ command
196
B1.2 LMI solution using LMI Toolbox 198
B1.3 LMI solution using Yalmip/SeDuMi 200
C Program of Multi-objective Sliding Surface and Control
Law
201

197
CHAPTER 1
INTRODUCTION 1.1 Introduction to Active Magnetic Bearing System
Bearings are one of the most essential components in all rotating machinery
and the study on its mechanism and development is becoming more indispensable as
the technology need pushes for more high-precision high-speed devices. By standard
definition, bearing is the static part of machine (stator) that supports the moving part
(rotor) of a system. While air and fluid bearings may be found in multi-degree-of-
freedom ball and socket joint of machines, ball bearings, which allow for pure
rotation, are by far the most popular and widely used in many industrial application
mainly due to its low production cost and ubiquitariness (Wilson, 2004). Magnetic
bearings are alternative to this traditional types or bearings, in which the bearings are
constructed from permanents magnets, electromagnets or both in which the bearing
in this combination is called hybrid magnetic bearing. An active magnetic bearing
(AMB) system is then defined as a collection of electromagnets used to suspend an
object via feedback control. For one degree-of freedom (DOF) system, usually AMB
is synonymously called magnetic suspension system as used in ground transportation
system where the vehicle is floated by the combination of controlled electromagnetic
and permanent magnetic forces i.e. Maglev Train (Trumper et al., 1997; Namerikawa
and Fujita, 2004; Fujita et al., 1998; Bleuler, 1992). For system with higher DOF,
AMB system contains a suspended cylindrical rotor that rotates in varying speed
depending on the applications. Thus, the obvious feature of AMB system is its non-
contact suspension mechanism, which offers many advantages compared to
conventional bearings such as lower rotating losses, higher operating speed,

2
elimination of high-cost lubrication system and lubrication contaminations,
suitability to operate at temperature extremes and in vacuum and having longer life
span (Okada and Nonami, 2002; Knospe and Collins, 1996; Bleuler, 1992). Due to
these significant reasons, AMB has been applied in a wide range of applications such
as industrial machineries and medical equipment, power and vacuum technologies,
and artificial heart, to quote a few applications (Knospe, 2007; Mohamed et al.,
1997b; Shen et al., 2000; Maslen et al., 1999, Tsiotras and Wilson, 2003; Kasarda,
2000; Lee et al. 2003).
Figure 1.1 illustrates an example of the standard structure of six-DOF AMB
system and the schematic arrangement of the rotor and magnetic coil (stator) of the
system. The system is composed of a cylindrical rotor or shaft made of laminated or
solid ferromagnetic material, sets of electromagnetic coils, power amplifiers, position
sensors and digital controller. The shaft is coupled to an external driving mechanism
such as pumps, electric motors or piezo actuators by a flexible coupling which
provides the rotational motion that forms the sixth DOF of the system. The
electromagnetic coils generate the magnetic forces by the current Ii and the position
sensors monitor the gap between the rotor and stator in which the captured
information is used by the digital controller to determine the control signal necessary
to suspend the rotating rotor to the centre of the actuating bearings. The control
signal is sent to the power amplifiers for necessary amplification of the current Ii
such that forces produced are able to withstand the dynamic requirement of the rotor
as well as the external mechanical load. In addition, with some changes in the
configurations of the AMB, the electromagnetic coils are not only able to supply the
radial forces, but also generate the forces for rotational motion consequently
eliminating the need of external driving mechanism. This so-called self-bearing
motor appears rather appealing for space-constraint application, however the design
construction and formulation of the control system is considerably much more
complex (Kasarda, 2000; Kanekabo and Okada, 2003; Bleuler, 1992).

3
(a) Typical AMB system set-up
(b) Rotor and electromagnetic coils (stator) with
respective coil currents, I1, I 2, I3 and I4.
Figure 1.1 Active Magnetic Bearing System
In most of AMB system, there exist separate sets of electromagnetic coils that
control the radial (x- and y- axes) and axial (z-axis) movement of the rotor due to
negligible dynamic coupling between these axes of motions. Advantageously,
Position sensors
Power supply cables
AMB for axial control
AMB for radial control
Rotor
Driving mechanism
(motor or pump)
I1
I3 I4
I2
Rotor
y
z x
y
x

4
separate control schemes are feasible to regulate the motions in radial and axial of
the system. As illustrated in Figure 1.1 (a), at each end of the rotor, a set of
electromagnetic coils is used for radial control where in each set, it contains two
pairs of coil as shown in Figure 1.1 (b). Based on this figure, at this end of the
system, the coil currents I1 and I2 supply the forces in y-direction while I3 and I4
supply the forces in x-direction. For the axial motion, one magnetic coil is located on
each side of the rotor end. As an alternative to electromagnetic coil, in some AMB
system where the rotor movement is very minimal, permanent magnets are sufficient
to supply the regulating axial force and thus more favored to be used.
(a) System with cylindrical AMB
(b) System with conical AMB
Figure 1.2 Configurations of Active Magnetic Bearing System
rotor
AMB for axial control
AMB for radial control
airgap, gi
Ii
Ii Ii
y
z
Ii
AMB for radial control
Ii
Ii Ii
Ii ς
airgap, gl
rotor
y
z

5
Figure 1.2 further illustrates two configurations of AMB system where in
Figure 1.2 (a), the cylindrical rotor is used. This is similar to the aforementioned
description of system in Figure 1.1 in which the axial motion is separately controlled
by a pair of electromagnetic coil. In contrast to this configuration, conical magnetic
bearing (Figure 1.2 (b)) where the rotor surface at the bearing end has small angle, ς,
which makes the airgap between the rotor and bearing to be in slanted position. With
this set-up, the electromagnetic coils supply both the axial and radial forces to the
system and the most obvious advantage obtained is the elimination of a pair of
axially-control electromagnetic coils. Nevertheless, this system experiences high
coupling effect between the axes and formulation of reliable controller under wide
operating is a very challenging task (Mohamed and Emad, 1992; Huang and Lin,
2004; Cole et al., 2004).
The various structural designs of AMB system are constructed to meet
different kind of requirements of the real-world application in order to exploit the
advantage of this non-contact lubrication-free technology. However, there are also
numerous nonlinearities inherited in AMB system that cause the system instability.
One of the most prominent nonlinearities is the relationship between the force-to-
current and force-to-airgap displacement. The general equation that governs the
magnetic force in AMB system is given as:
(1.1)
where μo is the permeability of free space, Ag is the cross-section area of the airgap,
N is the number of turn of the coil, and Ii and gi is the current and airgap at i-th coil,
respectively. By using the parameters given in (Mohamed and Emad, 1992; Lin and
Gau, 1997), this relationship can be plotted and shown in Figure 1.3 (a). Noticeably,
the relationship of the magnetic force in which the magnitude is proportional to the
square of the input current and inversely proportional to the square of the rotor
position causes sudden surge of the force magnitude as the airgap approaches zero.
Theoretically, this so-called negative stiffness imperatively causes singularity error

6
in many controller designs which practically translated to the saturation of magnetic
actuator. As one of the techniques to overcome this difficulty, a small bias current, Ib,
is usually introduced to the coil such that the linearity of the force-to-current about
(a) Nonlinear magnetic force
(b) Nonlinear magnetic force with biased current Ib = 0.8A
Figure 1.3 Nonlinear relationship between magnetic force and current/airgap

7
the centre of the system can be established to some degree which provides higher
system bandwidth and easier controller design. Figure 1.3 (b) shows the effect when
Ib = 0.8 A is added to the equation (1.1) where an almost linear relationship between
force and current and no singularity point is observed when the gap is zero.
Another major nonlinearity existed in AMB system is vibration due to the
mass unbalance of the rotor, or called imbalance. Imbalance is a common problem in
all machineries with rotational shaft when the principle axis of inertia of the rotor
does not coincide with its axis of geometry due to mechanical imperfections occurred
in fabricating machine parts, as shown in Figure 1.4 (Herzog et al. 1996; Shafai et al.
1994; Huang and Lin, 2004). When the rotor is ‘forced’ to rotate around its center of
inertia, Gm, instead of its centre of geometry, G, a centrifugal force caused by the
acceleration of the inertia centre creates a synchronous transmitted force and
furthermore manifested into synchronous rotor displacement. In the worst case
scenario, since the imbalance effect is proportional to the rotor rotational speed, at
high-speed operation the rotor whirls exceeding the allowable airgap and causes the
rotor to partially or worse yet annularly rub the stator which result in permanent
damage to the bearing system (Choi, 2002). Among the commonly considered
design solution to prevent this to occur is to have a mechanical retainer bearing
Figure 1.4 Illustration of unbalance rotor
x
ρ
y
Gτ
Gm
Stator
Rotor

8
installed as of the safety measures, however, the contact further exaggerates the
nonlinear dynamic motion to cause a more chaotic motion (Knospe, 2007; Grochmal
and Lynch, 2007; Li et al., 2006; Sahinkaya et al. 2004).
Other significant nonlinearities associated with the rotor dynamics are
gyroscopic effect and bending modes for flexible rotor. Gyroscopic effect present in
AMB system results in the coupling between the pitch (rotation around x-axis) and
yaw (rotation around y-axis) motion and the magnitude is proportional to the rotor
rotational speed. This imposes a more challenging task for stabilization of the system
for high-speed application (Li et al., 2006; Hassan, 2002). In addition, in some
applications where a long rotor is required, the excitation of flexible mode of the
rotor becomes crucial which may result in an inherently unstable system (Li et al.,
2006; Jang et al., 2005; Nonami and Ito, 1996).
In all AMB-related applications, the main objective is either asymptotically
regulating the rotor to center position (zero airgap deviation) of the system or
tracking a predefined rotor positions. However, with the presents of these
nonlinearities, the AMB system is liable to exhibit unpredictable and irregular
dynamic motions which complicate the design of effective system controller (Jang et
al. 2005, Kasarda, 2000). Conventional feedback controller methods developed by
assuming that the motions on each system axis are dynamically decoupled rarely
meet the stringent system requirements which result in limited operational range of
the system. Furthermore, nominal parameter values are commonly used in the system
where in real application, the exact values are poorly known and subjected to
variation which consequently result in deterioration of some controller performances
on the system. The need for more advanced control strategies is thus becoming
indispensable in order to achieve the desired system performance. In the following
section, the various control methods that have been designed for AMB system is
discussed.

9
1.2 AMB System Configuration and Control Strategies
The idea of active control magnetic bearing system has sparked interest as
early as 1842 after Earnshaw (1842) proved that the levitation of ferromagnetic body
and maintaining a stable hovering in six-DOF position is impossible to achieve by
solely using permanent magnet (Matsumura and Yoshimoto, 1986). Ever since then,
numerous control methods have been proposed by many research groups not only to
stabilize the system, but also to improve the performance of the system under
Figure 1.5 Hardware configuration for closed-loop control of AMB system
wide operational condition. Figure 1.5 illustrates the hardware set-up for the closed-
loop control of AMB system. The measurement of the four gap deviations forms as
the feedback information used by control algorithm executed in a fast Digital Signal
Processor (DSP) based processor. The calculated control signal is further amplified
to perform the required vibration control, positioning or alignment of rotor of the
system.
Gap sensors (Eddy current or
Hall-effect sensors)
AMB System
Low Pass filter
32 bit ADC High Speed DSP based
processor (Controller Algorithm)
32 bit DAC
Current/Voltage Amplifier
PC for logging

10
The electromagnets can be controlled by either the coil current (current-based
control) or the voltage (voltage-based control). In voltage-based control approach,
two design steps are usually adapted in which in the first step, a low-order current
controller is designed such that desired electromagnetic force is produced. Then,
tracking this current trajectory signal is used as the control objective for the design of
input voltage controller. The common assumption in this approach is the
combination of the processor and voltage amplifiers is able to fulfill the timing of the
two-stage nature of the controller which usually is very difficult to meet (Bleuler et
al., 1994b). Another important drawback is due to the inclusion of dynamic of the
power amplifier and circuit constraints, the linearization of amplifier and system
dynamics usually involved in the controller formulation which further limit the
system performance (Hassan, 2002; Charara et al. 1996). Some nonlinear control
methods such as differential flatness (Levine, et al., 1996), backstepping-type control
(DeQueiroz, et al. 1996a; DeQueiroz, et al. 1996b) and feedback linearization and
passivity-based control (Tsiotras and Arcak, 2005) are proposed but the difficulty of
overcoming singularity problem results in more complicated controller structures. In
the current-based control method, since there is a direct relationship between the coil
input current and the magnetic force shown by equation (1.1), the abovementioned
challenges in voltage-based control design can be relaxed and becomes more
advantages to AMB control system (Bleuler et al., 1994a).
The current-based control scheme can be classified into three modes of
operations of power amplifiers as shown in Table 1.1 (Sahinkaya and Hartavi, 2007;
Hu et al., 2004). The configuration of the tabulated coil currents is based on a single
pair of electromagnet in which one of the coils produces the opposite force of the
other coil. For Class-A control, a bias current, Ib, is applied to both coil and a
differential control current, Ic, is added to the bias current in one coil and subtracted
from the opposite coil depending on the net force required. The bias current is set to
half of the maximum allowable current, Imax. This mode of operation, also named as
Constant Current Sum (CCS) control, is the most widely used method in controlling
AMB system due to the fact that high bearing stiffness and good dynamic range can
be achieved (Grochmal and Lynch, 2007; Sahinkaya and Hartavi, 2007). In Class-B
mode of operation, or also known as Current Almost Complementary (CAC)
condition, a small bias current is supplied to both magnetic coils and at one instant of

11
Table 1.1 Mode of operation for a pair of electromagnet
Mode of Operations Input Current
Class A
,
,
where | | ,
0.5
Class B
and ,
or
and .
Class C
, 0,
or
0, ,
time, the control current is added to only one of the coils to produce the desired
control force. Although a possible lower power losses can be attained due to smaller
Ib, the bearing stiffness is reduced quite significantly which make the system to be
suitable for low vibration application. In this control mode, a possibly large feedback
gain is required to achieve the required bearing stiffness and likely will result in
current saturation. Tsiotras and Wilson (2003) and Tsiotras and Arcak (2005) have
shown that the control of AMB system with saturated input and low bias current is
nontrivial and a challenging nonlinear control problem. Another mode of operations
is the Class-C control where the bias current is totally eliminated and the two coils
are alternatively activated at an instant of time. This is equivalently called Current
Complementary Condition (CCC) where only one coil is energized depending on the
direction of the required force needed. Under this mode of operation, the nonlinearity
effects are severe and controller singularity problem occurred when the gap deviation
approaching zero is one of the most crucial design problems which result in
controller complexity. Apart from this design issue, the lacks of robustness against
changes in operating condition as well as poor dynamic performance are also major
shortcomings of this approach (Sahinkaya and Hartavi, 2007; Charara et al. 1996;
Levine et al. 1996).

12
Due to many possible combinations of design configurations and actuating
schemes exists in the control of AMB system, there exists abundance of control
design techniques that have been proposed to meet the control objectives which are
stabilization of the system and fulfilling specific application-related system
performances. The control strategies can be essentially divided into three main
groups: the linear control, nonlinear control and the control approach based on
mimicking human’s decision making process and reasoning or known as Intelligent
Control (IC) method. The linear and nonlinear control strategies are model-based
approaches where a mathematical model representing the AMB system as a class of a
dynamical system is a required for the development of the control. As an alternative,
due to the complexity in formulating the control law especially for the nonlinear
control techniques, the adaptation of the IC methods in AMB control has found
growing interest especially Fuzzy Logic (FL), Genetic Algorithm (GA) and Neural
Network (NN), or the fusion of any of the method with existing mathematical-based
methods.
The conventional Proportional-Derivative (PD), Proportional-Integral (PI)
and Proportional-Integral-Derivative (PID) control for AMB system are among the
earliest controllers considered for the control of AMB system due to its simplicity in
the design as well as hardware implementation (Bleuler et al., 1994b) and until
today, the controller still receives considerable attention in some specialized
application. In the work done by Allaire et al. (1989) and William et al. (1990),
discretized PD controller is designed based on linearized model at a nominal
operating point. The main emphasis of the work by Allaire et al. (1989), however, is
the design construction of AMB system to accommodate the variation of the load
capacity in thrust motion and the PD controller is used to achieve closed-loop
stability. Due to apparatus limitation, mechanical shims are used to gauge the airgap
and the controller is manually adjusted. William et al. (1990) has continued the study
where the relationship between the characteristic of the developed PD controller to
the stiffness and damping properties of AMB system is established. Other than
stiffness and damping curves, the rotor vibratory response is also used to show the
effectiveness of the control algorithm where from the experimental result, due to
time delay in feedback response and hardware limitation, the high frequency
response does not agree with the theoretical result. To overcome the difference, the

13
so-called Proportional-Derivative-Derivative (PDD) and Proportional-Integral-
Derivative-Derivative (PIDD) are proposed and applied into the system which yields
quite a satisfactory result.
In more recent year, Hartavi et al. (2001) has studied the application of PD
controller on 1 DOF AMB system where the electromagnetic model is developed
based on Finite Element Method (FEM), initially proposed by Antilla et al. (1998).
Good system stability is achieved, however, only under limited range of operating
condition. Polajzer et al. (2006) has further proposed a cascaded decentralized PI-PD
for control of the airgap and independent PI current controller to achieve high
bearing stiffness and damping effect of a four DOF AMB system. The controller is
designed based on simplified linearized single-axis model where the effect of
magnetic nonlinearities and cross-coupling effect are ignored. A considerable
improvement has been achieved in term of its static and dynamic response in
comparison to PID control developed in previous work. In an AMB system where
the rotor is flexible, the control of vibration due to bending mode of the rotor is
crucial. For the AMB system developed by Okada and Nonami (2002), a hybrid-type
magnetic bearing is used and PD controller is proposed to perform the inclination
control such that the system with flexible rotor is able to step through the bending
modes occurred at five critical rotational speeds. The five bending modes are
analyzed from the finite element model of the rotor that is transformed into a linear
state equation and the controller parameters are designed based on the linearized
model. With the central rotor position is controlled separately to provide sufficient
stiffness, the system with the proposed PD controller for inclination control is able to
run up to 6300 rpm rotational speed.
Due to limited performance of PD, PI or PID controller and design
procedure to incorporate various design requirements, other linear controller methods
have been proposed to fully exploit the possible active potentials of the AMB system
in permitting to a much higher degree of rotor vibration and position control (Bleuler
et al., 1994a; Huang and Lin, 2003). Another most popular linear control method
used by researchers is the Linear Quadratic Regulator (LQR) control which is based
on optimal control theory (Anderson and Moore, 1990). LQR design method is
designed by selecting the so-called weighting matrices that minimizes a pre-defined

14
linear quadratic cost function. Matsumura and Yoshimoto (1986) are considered as
among the earliest researchers that have applied the LQR-type controller in AMB
system. In their study, an LQR controller is designed and cascaded with and integral
term such that the steady-state error of the airgap deviation is eliminated. This
optimum servo-type control is formulated based on a linearized 5-DOF AMB system
at a constant biased current, where the deviations of rotor position from this
equilibrium are treated as system states to be regulated and the input to the system is
the electromagnetic voltages. The digital simulation results show that the system
achieve stability condition at zero speed and 90000 rpm, however, at this high
rotational speed, the coupling effect influence the control performance significantly.
The method is further applied into a system where the integral servo-type control is
to perform both the radial and thrust control for a cylindrical AMB system
(Matsumura et al., 1987). Through this study it is verified that multi-axial control of
AMB system is difficult to achieve with the proposed type of controller. Since both
of these works are based on a linearized model at one operating point, Matsumura et
al. (1999) has used a different linearization technique called exact linearization
approach such that the linear model can represent a wider range of the nonlinear
model. The design LQR controller for this newly linearized model confirms to
achieve wider range of stabilization area. The control method of this highly-cited
work (Matsumura and Yoshimoto, 1986) is also further adapted in a new type of
horizontal hybrid-type magnetic bearing (Mukhopadhyay et al. 2000). In this work,
the new type AMB system is developed by using a rotor made from strontium-ferrite
magnet and both the top and bottom stators are made from Nd-Fe-B material where
the combination of this permanent magnet configuration is proven to provide high
bearing stiffness to produce repulsive force for rotor levitation. The force-to-airgap
relationship is established by using finite element analysis (FEA) where the
relationship is integrated with the dynamic model of the AMB system. The optimum
integral servo-type control is designed to stabilize the system and tested on the
system up to the 800 rpm rotor speed.
In a quite similar scope of work, Lee and Jeong (1996) has designed
centralized and decentralized LQR controller with integrator to perform a control on
a vertical conical AMB system. For the centralized control, the coupling effect
between the axial and thrust motions is considered and this effect is ignored on the

15
decentralized controller design. The relationship between the current and voltage is
emphasized where the mathematical model of the electromagnetic coil dimension
and its dynamics are included in the design procedure where it is illustrated that the
coupling effect between the axial and radial axes of motion is quite insignificant for
the particular AMB system which result both the centralized and decentralized
controller produce comparatively similar performances. In a rather different
approach, Zhuravlyov (2000) has explored the design of LQR controller for not only
regulating the rotor position but also to reduce the copper losses in the coils. Two-
stage LQR based controller is developed such that the first controller is meant to
stabilize the rotor to the reference position with magnetic force is the system input.
For the second stage, another LQR controller is developed to produce the coil current
and voltage which produces the optimized bearing force while at the same time, the
copper losses in the coil is also minimized. Instead of taking the real value of the
system matrix, this approach has used the complex state-space system such that the
frequency content of the system can be incorporated. The study also shows that the
real implementation of the controller is difficult especially when the second stage
controller requires a switching term to achieve the desired objective, and controller
simplification is needed for practical purposes.
The works in the development of controller based on μ-synthesis have also
been reported by many researchers. Fujita et al. (1995) has proposed the μ-synthesis
controller that is designed based on a few set of active electromagnetic suspension
model. The combination of the nominal model, four set of model structures and
possible model parameter values are used to determine uncertainty weighting
function which form a sufficient representation of the range where the real system is
assumed to reside. A special so-called D-K iteration is then used to tune the
controller parameter to achieve robust stability as well as robust performance.
Nonami and Ito (1996) have used μ-synthesis method for stabilization of five-axis
control of AMB system with flexible rotor. The modeling of the system is performed
by using FEM technique and the resulted high order system is truncated by removing
the flexible mode for the purpose of controller design. It is shown that the controller
can achieve robust performance for this system and the it is noted that by value of the
structured singular value, µ, in the D-K iteration contribute to achieving good robust
performance.

16
Namerikawa and Fujita (1999) have further included more nonlinearities in
the AMB model by specifically classifying linearization errors, unmodelled
dynamics, parametric variations and gyroscopic effect as the uncertainties in the
system. These uncertainties are represented structurally in matrices and Linear
Fractional Transformation (LFT) technique is used to uniformly represent the AMB
as a class of uncertain system for controller development. Instead of using standard μ
test, a so-called mixed μ test is adapted to reduce the design conservatism. Losch et
al. (1999) have designed and implemented the μ-synthesis controller in a feed pump
boiler equipped with active magnetic bearings. They have proposed a systematic and
formalized way for deriving the controller design parameters based on model
uncertainties, control requirements and known system limitations. A new method for
determining suitable uncertainty weighting function has been proposed in which the
effectiveness of the designed controller is demonstrated by the robust performance of
the pump.
In different scope of research, Fittro and Knospe (2002) has designed the μ-
synthesis controller for specifically solve the rotor compliance minimization problem
– to reduce the maximum displacement that may occur at a particular rotor location
collocated at the region the disturbance frequency is not specified. Although the
controller produces a significant improvement compared to PD controller, the results
obtained however has suggested that a more accurate plant mode is required to yield
a more accurate result in minimizing the rotor compliance.
Another robust linear control design that has received considerable attention
in the control of AMB system is H∞ technique. Since the linear model does not
always express the exact representation of the system due to various uncertainties
present in the system, H∞ control technique offer a nice procedure to construct the
uncertainties into a proper structure for control design process. Fujita et al. (1990)
has worked on verifying the well-established H∞ controller on an experimental set-up
of a one DOF magnetic suspension system. The main objective is to achieve robust
system stabilization when the system is subjected to external disturbance. Various
model uncertainties are also considered by formulating frequency weighting function
which is included in the design procedure. Fujita et al. (1993) further develop H∞
controller for five DOF AMB system by using the Loop Shaping Design Procedure

17
(LSDP). The so-called unstructured multiplicative perturbation which describes the
plant uncertainties with the frequency weighting function is established which
reflects the magnitude of uncertainties present. After specifying the uncertainty and
performance weightings, by using the LSDP the shaping function is designed where
the H∞ controller is developed and tested experimentally which shows that some
minor online adjustment on the shaping functions is still required to achieve a more
favourable system response in term of regulating the airgap at various frequencies.
A simplified H∞ controller has been designed by Mukhopahyay et al. (1997)
for repulsive type magnetic bearing where an AMB configuration with permanent
magnet in the radial axis is used to increase the bearing stiffness. The result from the
study shows with the combination of the proper placement of the permanent magnet
and controller design the radial disturbance is able to be attenuated for an 8 kg non-
rotating rotor.
A continuous and discrete time H∞ controller have been proposed by Font et
al. (1994) to regulate the rotor to the center position of an electrical drive system by
using AMB. The first six bending modes of the rotor is included in the system model
such that the design controller can achieve robust stability towards the frequency
excitation occurred at these modes. For the continuous controller, instead of using
the truncated method, an aggregation method to reduce the order of the system is
adapted where this technique offers the advantage of retaining the most important
poles in the reduced order system. Satisfying closed-loop behaviors have been
obtained, however, the power amplifier introduces severe constraint on the control
capability.
Namerikawa and Fujita (2004) and Namerikawa and Shinozuka (2004) have
used the H∞ controller design technique for disturbance and initial-state attenuation
(DIA) on magnetic bearing and magnetic suspension system, respectively. In the
design procedure of the proposed H∞ DIA controller, the selections of the frequency
weighting related to the disturbance input, system robustness and the regulated
variables are performed iteratively for the construction of linearized generalized
system plant. A so-called weight matrix N obtained from this procedure is found to
indicate the relative importance between attenuation of disturbance and intial-state

18
uncertainty which further affects the calculated controller gains. Four H∞ DIA
controllers have been designed under different values of frequency weighting to
assess the variation of matrix N on the system performance where it is shown the
system overshoot is inversely proportional to the magnitude of N. In (Namerikawa
and Fujita, 2004), the non-rotational AMB is used which implies that no gyro-scopic
effect and imbalance present.
In a more recent work, Tsai et al. (2007) has proposed H∞ control design for
four-DOF vertical AMB system with gyroscopic effect. The well-known Kharitonov
polynomial and Nyquist Stability Criterion are employed for the design of the
feedback loop and it is confirmed experimentally that the controlled current produced
is much less compared to the current produced by LQR or PID control methods. The
performance of the system is verified in the range 6500 rpm to 13000 rpm rotor
rotational speed.
Linear controller based on Q-parameterization theory has also been widely
tested and applied in AMB system starting with the work from Mohamed and Emad
(1992). In this work, a Q-parameter controller based on linearized conical AMB
model is proposed which can meet various system requirements such as disturbance
rejection, rotor stability and tolerances towards plant parameter variations. In the
design procedure, these requirements are treated as constraints and can be classified
by the doubly co-prime factorization matrices and the sets of stabilizing controllers
which include the free design parameter Q. The search of the desired Q-parameter
that produces the desired controller gain becomes an optimization problem where
Q’s are chosen through a customized optimization program. In this work, the
controller is designed for imbalance-free rotor at speed p = 0, and good transient and
force response is achieved until p = 15000 rpm. Since the order of the controller
equal to the order of the plant and the order of the weighting function describing the
constraint, the works are further extended by Mohamed et al. (1997a) where the
linear system is transformed into three single-input-single-output (SISO) systems
with the inclusion of the rotor imbalance. This simplification results in solving a set
of linear equation rather that finding the solution from the complex optimization
problem, where good rotor stabilization is achieved at three pre-defined rotor speed.

19
The Q-parameterization controller in discrete form is proposed by Mohamed
et al. (1999) to specifically overcome the imbalance at various speed. The rotational
speeds are scheduled in a table and appropriate gain adjustment according to the
selected speed will be selected as the Q-parameter for the controller. This gain-
scheduling method shows the elimination of imbalance at three rotor rotational speed
is achieved with simpler design technique, however, a large look-up table is required
to accommodate the operation at wider range of rotor rotational speeds.
With the linearization of force-to-current and force-to-airgap displacement
relationship, AMB model belongs to a class of linear parameter varying (LPV)
system which is suitable for LPV controller design. Zhang et al. (2002) has proposed
a class of LPV controller that can maintain robust stability and performance at wide
range of rotor speed. The augmented AMB system model is characterized as many
sets of convex representation of system where the system matrix is considered as
affine function of the rotor speed and treated as a set of structured uncertainty range.
Due to the convexity property, H∞ control rules is applied to each vertex yield stable
closed-loop system and the LPV controller gain can be computed based on the
convex representation of the system. The simulation result confirms that the
robustness of the controller is obtained in which with the 3% uncertainty present, the
nominal performance index, , is well below 1 where the desired is only 1.
However, in the experimental verification, due to the high computational time, some
simplification is introduced in the controller algorithm to achieve acceptable system
performance.
The synthesis of the LPV controller involves finding the solution of a single
Lyapunov function that produces a stabilizing controller over a specified parameter
range. When finding the solution is not possible, the normal approach is to formulate
a few LPV controllers at many smaller parameter sub-regions which form a so-called
switched LPV system. Lu and Wu (2004) have worked on this type of controller for
AMB system and proposed hysteresis and average-dwell-time-dependent switching
methods to maintain the system stability when the system switches from one sub-
region to another. Both of the switching techniques lead to non-convex optimization
problem that is difficult to be solved, however, the convexification of the hysteresis
switching method is possible by using Linear Matrix Inequality (LMI) technique.

20
The simulation of the five-DOF vertical AMB system shows the effective of the
switching methods but imposes extra calculation overhead.
Unlike the linear control methods where the controller synthesis is based on
an approximate linear model, nonlinear control can be more suitable for a wider
range of system operation and conditions with the possible inclusion of system
uncertainties and nonlinearities. Among the prominently covered nonlinear control
techniques for AMB system are back-stepping method, feedback linearization,
adaptive control and sliding mode control or the fusion between any of the methods.
For back-stepping method, DeQueroz et al. (1996a) have proposed a class of back-
stepping type controller for a planar two DOF AMB system such that the tracking
error of the rotor position can be globally exponentially eliminated. In the proposed
method, the desired force trajectory signal is designed such that the rotor position
tracks the predefined position trajectory. Based on this force trajectory, a special
structure of a so-called static equation is established in which a desired current
trajectory is constructed to satisfy the static equation. In the final design step, the
produced current trajectory is set as the control objective for the design of voltage
input. In order to ensure global exponential rotor position tracking, composite
Lyapunov function is used. The simulation of the tracking of non-rotating rotor
confirms the validity of the method, however, it is observed that the selection of the
controller parameters is crucial when there exists some variations in the system
parameter.
When the airgap between the rotor and the stator is large, the nonlinear
magnetic effect becomes more critical due to the variation of the values of coil
inductance, resistance and back electromotive force (e.m.f) against currents and rotor
position. This effect is studied by DeQuiroz et al. (1998) where it is shown that the
relationship between the produced electromagnetic force and the current is highly
coupled and complex. By extending the method previously proposed by DeQueroz et
al. (1996b), due to the nonlinear electromagnetic force, the design of the current
trajectory is shown to be extensive yet an achievable task. The tracking of the rotor
position is achieved quite satisfactorily as shown by the simulation result and as
suggested by the research group, extending to a higher DOF AMB system requires
the adaptation with other control techniques to reduce the design complexity.

21
As highligthed by many works including (Montee et al., 2002; Tsiotras and
Wilson, 2003), application of standard back-stepping method may cause singularity
problem when the electromagnetic flux approaches zero. To overcome this problem,
Montee et al. (2002) proposes to introduce an exponentially decaying bias flux and a
new back-stepping control algorithm is designed in such a way that the system is
stabilized at a faster rate than the decaying bias flux. The main advantage of this
method is twofold: 1) singularity problem can be avoided, 2) zero ohmic loss at
steady state. The controller is designed in both the Class B and Class C control mode
and the study concludes that the Class C mode with the exponentially decaying flux
produces the least power dissipation due to ohmic loss while retaining satisfactory
rotor positioning to the center, however stability of the system is more prominent in
Class B mode.
Tsiotras and Wilson (2003) has proposed a novel integral back-stepping type
control law to alleviate the singularity problem in Class C voltage-input AMB
system when the produced control flux is zero. In this work, a new flux-based one
DOF AMB system is derived based on the so-called generalized complementary flux
condition in which the model produced is suitable for both zero and low bias flux
control type (Class B and Class C). By adapting other control tools such as control
Lyapunov function, homogeneity and passivity technique, the integral backstepping
controller constructed is able to overcome the singularity problem or in some system
condition, the region of singularity is reduced significantly. The simulation works
confirm the finding of the study and as a by-product of the control method and it is
shown that robustness against the system parameter variation is also achieved.
Back-stepping control is a full-state feedback approach where for AMB
system, measuring the velocity of rotor is often difficult. In a different scope of
study, Sivrioglu and Nonami (2003) have investigated the design of adaptive back-
stepping control based on output feedback. A nonlinear observer is constructed to
estimate the unmeasured state (rotor velocity) and based on back-stepping method, a
dynamic controller is formulated with the objective to eliminate the rotor tracking
error. The inclusion of the adaptive-type observer in the design is shown to achieve
global stability by using Lyapunov function. To verify the result, a flywheel AMB
system modeled and experimentally used where the gyroscopic and imbalance are

22
excluded in the dynamic model. At low rotor speed, the result give satisfactory
tracking performance of the rotor while the current used is also minimized as
suggested in Class C control mode.
In most application where the AMB system is used, the construction of the
AMB-embedded system usually remains in static position (fix base). However, for
some application such as flywheel battery for energy storage system, the body of the
system is subjected to movement and undesired disturbance that causes the operating
point of the rotating rotor to be disrupted. This situation is always true for flywheel
battery installed in space craft (Wilson, 2004), large energy storage system in the
earth-quake prone area (Sivrioglu, 2007) and single-gimbal gyro for satellite
application (Liang and Yiqing, 2007). This shaking-like movement of the AMB
system will introduce disturbance to the planned motion of the rotor and might cause
possible system instability which is very undesirable for this high-energy capacity
system. Sivrioglu (2007) has proposed a nonlinear adaptive back-stepping method to
overcome this so-called vibrating base effect where the formulation of the controller
is based on an imbalance-free vertical AMB model. In this study, the AMB system is
coupled to a ‘shaker’ that introduces a bounded acceleration disturbance to the
system and the controller in similar type of structured designed in (Sivrioglu and
Nonami, 2003). Accessing the controller at low speed where the gyroscopic coupling
is minimal, the system is able to achieve stability where the rotor whirls around the
allowable airgap, however, the finding shows that a comparable performance can be
achieved with PID controller for the flywheel system.
For the feedback linearization method, the main objective is to transform the
nonlinear system dynamics into a fully or partially linear model and the established
linear control methods can be employed (Slotine and Li, 1991). This is achieved by
designing an input that cancels the nonlinearities and the resulted closed-loop system
is linear and controllable. Li (1999) has investigated the feedback linearization
technique on CCS, constant flux sum (CFS) and constant voltage sum (CVS) mode
of operation on one DOF AMB system. The CVS control is obtained by linearizing
the model under CFS mode. The three constant-sum configurations are compared in
term of closed-loop performance, nonlinearity and the effect of the current
constraints where in the studies the CVS is proven to be the least difficult in the

23
design procedure while CFS yield the most complex controller structure. The work is
further continued to investigate the constraints imposed on feedback linearization
design such that only single input actuates at one instantaneous time (Li and Mao,
1999). This is found crucial since there exist many constraints in feedback
linearization controller that can produce linearized model in which some of the
imposed constraints can result the linear plant tends to be nonlinear. In the study,
minimum copper loss and constant upper bound of force slew rate have been derived
to be the design constraint where it is proven that the feedback linearization with
constant bound on force slew rate produces a more linearized plant.
In a rather different scope of work, Levine et al. (1996) has proposed a
nonlinear control law based on feedback linearization procedure where the main
objective is to be able to perform trajectory tracking while avoiding the use of
premagnetization current. The differential flatness property is adapted in the design
process since this method has simple parameterization curves for the system to track
and the complicated integration of differential equations is replaced by solving
simpler algebraic problem. The Class C mode of operation is used and current-based,
voltage-based and cascaded controllers are proposed and investigated in the study.
The design of these controllers is executed on one DOF system and then generalized
to five-DOF AMB system without imbalance. The study has also shown the cases
when the premagnetization current is necessary to achieve system stability and
desired performance for the specific AMB system. Grochmal and Lynch (2007)
continue this work by performing experimental work on five DOF AMB system to
validate the design assumptions made in simulations and ensure robustness towards
unmodelled dynamics. In this study, two nonlinear controllers based on CAC and
CCS modes are proposed and compared with standard decentralized PID controllers
in term of the system response during high-speed rotor rotation and the tracking
performance for non-rotating rotor. The force parameter identification is done on
both modes to establish the force-to-current and force-to displacement relationships.
At p = 14000 rpm, it is shown that CCS controller can achieve far superior result
compared to CAC and PID controller in which the radius of rotor movement is about
20µm while the other two controller almost twofold. In addition, when the system is
sped up passing p = 5000 rpm, the CAC controller has forced the voltage source to
reach the saturation limit, 12V, in order to maintain the rotor to an acceptable

24
distance from the center. Under the tracking mode, it is shown that only CCS and
CAC controllers can track the predefined sinusoidal curve while decentralized PID
controller fails to give good tracking performance.
Hsu and Chen (2002), and Hsu and Chen (2003) work on feedback
linearization method for a 3-pole AMB system. This type of AMB configuration is
reported to cost much less than the normal 4-pole or 8-pole AMB system since less
number of power amplifiers is used. On the other hand, due to the non-symmetric
nature of 3-pole AMB, there exists a very strong nonlinearity resulted from magnetic
flux coupling. With the voltage is treated as the input and magnetic flux as one of the
system states, the imbalance-free system model can be established into an input-
affine form that is feasible for feedback linearization control design. At rotor speed p
= 2000, the performance of the controller is accessed at various initial positions
where the rotor is able to be regulated to the center position, given that the initial
positions reside in the designed admissible set constructed via Lyapunov analysis. As
highlighted in the work, the inclusion of gyroscopic effect in the model needs further
study for the development of the feedback linearization controller.
The design and application of feedback linearization method on magnetic
suspension system is also considered by many researchers in which the system is
actually analogous to one DOF AMB system. In magnetic suspension system, the
main nonlinearity is due to the force-to-current and force-to-displacement (airgap)
relationship whereby the analysis and design method is directly applicable to multi-
DOF AMB system. Trumper et al. (1997) has used single-input and two-input
suspension system for the feedback linearization controller design and the
performance is compared to linear controller. Under the given range of operating
condition, feedback linearization achieves better performance in term of regulating
airgap deviation, however, due to possible modeling error, sustainable oscillations is
still observable. In a similar line of study, Joo and Seo (1997) and Fabien (1996)
work on the nonlinear controller design for magnetic suspension system with
parametric uncertainties and observer-based feedback linearization, respectively. The
emphasis of the work by Joo and Seo (1997) is the formulation of the controller for
the system that is subjected to variation of the mass and bounded input disturbance,
while for Fabien (1996), the controller design that is based only on the available

25
output for stabilization of the system becomes the design objective. The results
obtained from both studies verify that within the scope of the work the proposed
feedback linearization controller can achieve good system stabilization by linearizing
the system model, though, for the observer-based controller by Fabien (1996), more
controller design parameters resulted since the addition of the observer increases the
dynamic of designed controller.
As claimed in most of the above mentioned works related to the feedback
linearization method, the biggest drawback of this control approach is the exact
model of the system is required at design stage in which, in reality, obtaining the
exact system representation with nonlinearities is next to impossible. The difference
between the actual nonlinear model and the mathematical representation of the to-be-
cancelled nonlinearity effect causes the design controller not to be able to linearize
the system and worse yet, this residual effect possibly makes the system unstable. In
order to overcome this limitation, the most prevalent approach is to integrate the
feedback linearization controller with other type of robust controllers. Lindlau and
Knospe (2002) have used the µ-synthesis based controller cascaded with the
feedback linearization such that the robust performance can be achieved. For this
work done on the single-DOF AMB system, the detailed nonlinear electromagnetic
dynamic model is developed based on combination of both the analytic relationship
and experimental data such that the nonlinearity is more accurately represented.
Then, in order to accommodate the uncertainty due to the coil resistance variation, a
special form of structured uncertainty is augmented to the established feedback-
linearized model where the robust µ-synthesis technique is used. The system
performance in term of disturbance rejection is confirmed to meet the µ performance
specifications regardless the operating point and existence of the parameter
uncertainty. The work is further continued by Chen and Knospe (2005) where the
operation in current mode is used in order to overcome the difficulty in real
implementation of voltage-mode controlled previously proposed in (Lindlau and
Knospe, 2002). Under this current mode controller, it is found necessary to construct
a corrective filter due to the fact that there always exist differences in 1) actual
position and the position reading obtained from the position sensors and 2) actual
coil current and the commanded current. Based on the structured residual uncertainty

26
developed experimentally, the feedback-linearized µ controller is able to achieve
robust system performance even subjected to large airgap variation.
The fusion of feedback linearization with back-stepping method is also
considered by Hung et al. (2003). By first modeling the one DOF two-input AMB
model into a fourth order nonlinear system, a nonlinear state-feedback control law is
formulated to compensate the nonlinear magnetic effect which produces a linear
controllable system. From this model, a so-called pseudo input is established with
PD feedback law to stabilize the linearized dynamic. In order to construct the actual
input current and voltage, a back-stepping type of controller combined with high-
gain linear feedback control law is proposed. This multiple-loop control algorithm is
run on experimental set-up with rotor speed up to 1800 rpm. The result shows the
performance of the controller yields better performance than the PD controller in
four areas which are: 1) better stabilization of rotor for large position variation, 2)
smaller tracking error, 3) wider range of stable controller gain and 4) lower current
consumption due to operation in Class C mode.
Another notable robust nonlinear control method that is frequently considered
when robust stability and robust performance of nonlinear system is expected is
Sliding Mode Control (SMC). SMC is known as a type of Variable Structure Control
(VSC) where in this VSC control scheme, a discontinuous switching method is
proposed to switch between two distinctively different systems structures in which it
will produce a new class of system dynamics that slides on a so-called sliding
surface. The main advantage of this control method is always associated with its
invariance property towards so-called matched uncertainties and disturbance
(DeCarlo et al., 1988; Hung et al., 1993; Edwards and Spurgeon, 1998). In the
control of AMB system, SMC controller has been used in many forms established to
achieve the required system performance or to tackle specific application-oriented
problem. The fusion of SMC with feedback linearization method for AMB control
has been proposed by numerous researchers. Smith and Weldon (1995) has worked
on the nonlinear formulation of cascaded SMC and feedback linearization controller
to achieve robust regulation of the rotor to the center while the system is subjected to
external disturbance, parameter uncertainty and unmodelled dynamics. In this study,
the voltage control is considered which required the system to be linearized at an

27
equilibrium point set at a predefined bias current and the feedback linearized control
law is designed to eliminate the second-order nonlinear coupling effect. Since the
uncertainty is still present due to the parametric variations, the SMC control
technique is developed such that the tracking of the rotor position can be performed.
The simulation results verify that the proposed controller is effective in achieving the
desired position tracking, however, no explicit method of choosing the surface
parameters is proposed.
Charara et al. (1996) has taken a quite similar approach by developing
feedback linearization and SMC control for a hybrid AMB system where permanent
magnets are used for pitch, yaw and translation along z-axis motion control. In this
work the dynamic model is derived based on Lagrange’s equation where the resulted
feedback-linearized model with pre-defined bounded unbalance effect is used for the
SMC design. The work adapts the sliding surface based on (Slotine and Li, 1991)
where it characterizes zero tracking error of rotor position displacement once the
system in the sliding motion. The work on simulation verifies the superiority of the
proposed control law, in the contrary, the limitation due to the need of high sampling
frequency and ensuring the existence of sliding mode in all operating conditions
result in degradation of system running on hardware set-up.
As highlighted by Hsu and Chen (2002), it is always deemed to have
feedback linearization control law cascaded with other robust controller type so that
the control law is more of practical use. Working still on the 3-pole AMB system
with non rotating rotor, an integral SMC control law is designed based on the
perturbed linearized plant where the difference between this perturbed model and the
linearized model indicates the uncertain element of the system (Hsu and Chen,
2003). In contrast to normal approach where the sliding manifold is required to reach
zero in finite time to ensure asymptotic stability, in this integral SMC design, it is
only necessary to maintain the derivative of the sliding manifold to be zero since it
will result the rotor positions to eventually approach zero. When comparing the
controller performance to other linear controller and feedback linearization cascaded
with linear controller, it is shown that integral SMC gives the best result in bringing
the rotor to the center position with smallest overshoot while consuming the least
amount of current. Results obtained from experimental works verify the effectiveness

28
of the method, however, under large value of uncertainty, magnetic saturation may
occur that degrades the performance. Chen et al. (2005b) continues this study by
experimentally investigating the controller performance when a rotating rotor is used.
The result shows that for this 3-pole AMB system, the maximum allowable rotor
speed is 3000 rpm in which for any rotor speed that is higher than speed might cause
the rotor to rub the retainer bearing.
As it has been manifested in many research works, SMC control approach is
able to meet various control requirements for endless kind of applications such as
power electronics, bioprocess, motion control and robotics, to name a few
(Bartoszewics and Patton, 2007). In AMB application, among the earliest work that
use the SMC technique is done by Rundell et al. (1996) where a static and dynamic
SMC control law is developed for stabilization of a vertical AMB system. In this
study the AMB model based on (Mohamed and Emad, 1993) is used where the
model is linearized at an operating point and any system uncertainties and
disturbance is classified as an external perturbation force. The design of the stable
sliding surface in done in such a way that the external perturbation force mainly
composed of the imbalance is included in structure of the surface. By having this
type of surface, the imbalance effect is cancelled to produce stable sliding motion,
but requires the rotor rotational speed as one of the feedback signal. Both the static
and dynamic SMC control law is constructed with the inclusion of a discontinuous
term to eliminate parameter uncertainties, where a constant gain is selected to be
sufficiently large to bound the uncertainty effect. It has been shown by simulation
result that both controllers are effective to stabilize the given plant until about 2800
rpm rotor rotational speed.
In the SMC control design, the system behavior is dictated by the dynamic of
the designed sliding surface of sliding motion exists. Since AMB system can be
treated as a LPV system at steady state, Sivrioglu and Nonami (1998) has proposed
the design of time-varying sliding surface design based on H∞ frequency-shaped
technique where a new augmented system by using a prefilter is established. This is
followed by specifying two frequency shaping filters to achieve robust stability and
sensitivity reduction in which with the combination of the filter and the LPV AMB
model, gain-scheduled controller is computed by using LMI technique. The

29
performance of the proposed approach is confirmed to be able to stabilize the AMB
system whereas at the critical rotor speed of p = 6000 rpm the orbiting movement of
the rotor is noticed to have a large diameter of orbit.
Tian (1999) has considered the design of discrete-type SMC observer and
SMC control law for AMB system with flexible rotor where the system is set to run
on Class A mode with bias current 4A. In designing the controller, the flexible motor
is modeled by using FEM technique and then incorporated with the electromagnetic
dynamics. The resulted system in 26th order is reduced for the formulation of the
controller where a state and disturbance observer is constructed in prior. The discrete
controller is found to be smooth in which the excitation of unmodelled dynamic, that
is often crucial for flexible rotor, is avoided. In comparison to linear controller, good
system stability and tracking performance is also achieved at high rotor rotational
speed.
In a slight different control approach, Lewis et al. (2001) has studied the
design of continuous SMC controller for a flexible AMB system based on output
feedback due to the fact that not all system states are practically measurable. The
flexible rotor is modeled by using Hamilton’s principle that yields two high-order
partial differential equations. The discretization of the equations by using the
Galerkin’s method produces a form of system model in state-space representation
that is further truncated for controller development. The SMC method based on
(Slotine and Li, 1991) is adapted and the continuous function is used to replace the
discontinuous term of the control law. Based on the open loop test, the critical rotor
speed occurs at p = 6963 and the simulation result shows that the proposed control
law is able to attenuate the effect of parametric variations and imbalance at this speed
and up to 10000 rpm. It is also found that the gain constant and boundary layer
thickness is crucial to ensure to achieve the desired system stability since it is noticed
that the variation of this two controller parameters do have significant influence on
the magnetic bearing stiffness and damping.
For some AMB system, the secondary electromagnetic effects such as flux
leakage, fringing flux and finite core permeance are the contributing factors that
degrade the system performance. Yeh et al. (2001a) have studied the influences of

30
this nonlinearity effect in one DOF AMB system and proposed the used of SMC
technique to stabilize the system. The bond graph model built based on Thevenin’s
theorem is developed to represent these secondary effect and FEM technique is used
to obtain the possible range of the parameters. Based on deterministic method that is
similar to the work by Osman and Roberts (1995), the bound of the uncertainties due
to the parametric variation is defined and control law based on (Slotine and Li, 1991)
is designed such that the system is robust within the specified range of operation. The
performance of the controller in regulating to zero rotor position is confirmed by
simulation and experimental work to be more superior than PID and feedback
linearization method. In a relatively similar scope of work, Yeh et al. (2001b) has
proposed a new SMC controller for both the current input and voltage input AMB
system that is able to track the rotor position. In the voltage mode operation, the
integrator back-stepping method is adapted to overcome the ‘mismatched’ between
the control input and the rotor dynamics. For this non-rotating rotor AMB system,
the tracking of a unit step input under both current and voltage input is found to be
satisfactory where very small tracking error is produced.
In Lee et al. (2003), a continuous SMC control law based on special form of
boundary layer technique is designed for a magnetic balance beam system and
further the controller structure is generalized to multi-DOF AMB system. The design
approach is similar to the conventional SMC design technique, however, the
discontinuous term is replaced with a ‘costumed’ form of continuous term that is still
able to bound the effect of uncertainties present due to the system parameter and
external disturbance. The application of the controller on the magnetic balance beam
shows that the external disturbance is able to be attenuated to a satisfactorily minimal
level but the study on the multi-DOF AMB is not shown and remain as the future
direction of the work.
For some application where flexible rotor is used, the possible contact with
electromagnetic coil might occur and cause the system damage. As previously
described, the use of a back-up mechanical bearing (retainer bearing) is often to be
an acceptable solution, however, in the case where the rotor does have a contact with
this retainer bearing, the dynamic of the system changes significantly which requires
a stabilizing mechanism. Jang et al. (2005) has worked in this area where SMC

31
technique is found to offer an excellent solution. In this study, a horizontal AMB
system with flexible rotor and retainer bearing is modeled into a class of nonlinear
system where the tracking error of the rotor position is treated as one of the system
states. A PID-like sliding surface is constructed in which the pole assignment method
is used to determine the surface parameter. The reachability of states to the sliding
surface is guaranteed by using the approaching law method and the stability of the
system is also theoretically ensured. The current-input Class-A AMB system is
verified in simulations where stable system performance at high rotor speed is
achieved with bias current of 1.8A.
In the study of AMB system, the control method specially designed to
remove or attenuate the vibration effect due to rotor imbalance is considered by a
handful of research groups. This is due to the fact that vibration caused by imbalance
is proportional to the square of the rotor speed and undoubtedly becoming more
significant for high-speed application. The imbalance effect is a synchronous-type
disturbance where the magnitude and phase is dependent to the rotational speed
which implies that which the exact identification of the disturbance signal amplitude
and phase, the imbalance can be eliminated quite effectively. The adaptive vibration
control naturally seems the most suitable control technique to meet this design
objective. There exist two control techniques with regards to imbalance elimination
which are autobalancing and unbalance compensation. For autobalancing, the rotor is
forced to rotate around its center of inertia which eliminates the generation of the
synchronous disturbance force. For the unbalance compensation method, the
generation of the force that is opposite to the synchronous signal is performed to
produce zero net force on the rotor that rotates on its center of geometry. Shafai et al.
(1994) have used the adaptive force balancing compensator composed of a
synchronous signal generator that is used to generate the imbalance-like disturbance
signal and the Fourier Coefficient computer to filter the frequency of the input of the
rotating rotor. This cascading controller works quite effectively on one DOF AMB
system and it is noted that if there exists disturbance with higher harmonic content,
another high frequency compensator is necessary.
This type of feedforward adaptive vibration technique is also considered by
Betschon and Knospe (2001) since it is quite straightforward design process

32
compared to feedback vibration control. The active vibration controller is inserted
between the feedback controller and position sensors such that the synchronous
disturbance is minimized. Then, the global stabilizing feedback controller is designed
such that the quadratic function of rotor position is minimized which yields stable
vibration-minimized AMB system performance that is confirmed by experimental
work. Furthermore, in order to reduce the computational burden on the hardware, the
adaptation algorithm is simplified by taking the diagonal element of the optimal
adaptation gain matrix that is dependent on the rotor rotational speed which result
minimal degradation in system performance operating at various operating speed.
Lum et al. (1996) has also considered adaptive autocentering technique such
that autobalancing is achieved. In this method, an online identification of the
coordinate of the imbalance mass and the rotor principle axis of inertia is constructed
where the adaptation algorithm requires only the rotor displacement and velocity.
Once the identification converges to the actual values of the imbalance coordinate
and principle axis of inertia, with any stabilizing controller, the vibration due to
imbalance is removed quite effectively and system stability is guaranteed regardless
of the rotational speed of the rotor. The method is however limited to rigid rotor
since for flexible rotor, the online identification algorithm of the principle axis of
inertia and imbalance coordinate is challenging due to the existence of flexible
modes of the rotor.
Shi et al. (2004) have also adapted the feedforward technique to attenuate the
synchronous disturbance by proposing two adaptive compensators to achieve either
autobalancing or unbalance compensation. The proposed adaptive methods are
switched from one to the other depending on the bandwidth of the system where the
autobalancing required lower bandwidth. To achieve acceptable disturbance
attenuation, the performance measures are introduced called ‘direct’ and ‘indirect’
method in which for direct method, the performance measure of the adaptive
algorithm is the direct function of the vibration signal to be minimized while for
indirect method, the performance measure is based on the error of the position. Based
on filtered-x least-means-square method adaptive algorithm, the direct and indirect
unbalance compensation method is established and tested on AMB system
experimental rig. The study shows that both methods perform quite effectively in

33
minimizing the disturbance and pass the critical rotor speed at about 1300 rpm
stably.
Multivariable generalized notch filter used for unbalance compensation is
considered by Herzog et al. (1996). In many previously reported works related to
notch filter design for vibration elimination, the filter is designed in open-loop and
inserted to the closed-loop control system that may cause the system instability. In
contrast to this approach, the filter is designed by cascading directly to the controller
such that the filter is a part of the closed-loop system to be stabilized. The design
parameter of the filter is found to be strongly dependent on the so-called inverse
sensitivity matrix that is a function of rotational speeds. To cater the elimination of
vibration at various speeds, a look-up table technique is used to store the matrix
value for run-time use of the controller. The verification on a 500 HP turbo expander
machine is performed at rotor speed close 30000 rpm where imbalance vibration is
minimized quite effectively for this weakly gyroscopic coupled system.
In the case when the frequency of the disturbance is unknown, it is necessary
to estimate the frequency of the disturbance in prior developing the adaptive
algorithm. In addition during the estimation process, the susceptibility to noise
deteriorates the algorithm convergences and causes error in the estimation process.
Liu et al. (2002) has proposed a nonlinear adaptive unbalanced vibration control that
features both the rotational synchronizing and asynchronizing harmonic disturbance
to overcome this weakness. By first developing an adaptive single-frequency
tracking algorithm, the method is expanded to adaptive multiple frequency tracking
and a new modification law that guarantees output errors converge to zero
asymptotically. The method is verified by simulation and experimental work with the
range of rotor speed between 4000 rpm to 12000 rpm where the result shows that the
attenuation of the disturbance at multiple frequencies considerably effective.
A decentralized automatic learning control method for unbalance
compensation based on time domain is considered by Bi et al. (2005) in which the
method adapts an intelligent-like updating law that reduce computational burden
quite significantly. The four DOF AMB system is treated as four one DOF AMB
system and individual learning law is constructed which includes learning gain and

34
learning cycle parameters. The gain parameters are constructed in a look-up table
format depending on speed requirements and the learning cycle is treated to be equal
to the rotor rotational period such that operation at various rotor rotational speeds is
met. By cascading the controller with PID controller experimental verification up to
3500 rpm rotational speed shows that imbalance vibration can be minimized quite
effectively at steady state and some overshoot in the rotor displacement and coil
current is noticed when there is an abrupt change in the rotor speed.
In the scope of utilizing IC methods and its associated tools such as FL, NN
and GA for the design of AMB stabilizing controller, the growing interest can be
noticed due to the fact that the control synthesis of this non-model-based control
technique offers simpler solution in some AMB control application. Hung (1995) and
Hong and Langari (2000) have used the fuzzy logic technique to represent the
nonlinear AMB model that describes the input-output relationship for the entire input
range. While Hung (1995) works on one DOF AMB system that produces simple
fuzzy model, Hong and Langari (2000) have adapted the Takagi-Sugeno-Kang fuzzy
model to represent five-DOF AMB system which includes the effect of harmonic
disturbance and parametric uncertainties. In this modeling technique, many locally
linearized models that valid for small region of operations are partially overlapped
such that the nonlinear model can be sufficiently represented. The fuzzy control
design technique thus is effectively used to accommodate the required system control
performance. The result in Hung (1995) shows that the non-rotating rotor is able to
be driven to central position at reasonably fast settling time and for Hong and
Langari (2000), asymptotic rotor position is obtained at rotor speed up to 720 rpm. It
is also observed that when there are variations in the weight of the rotor and the force
constant, the rotor position remains in the bounded region of stability.
In a similar scope of work, Huang and Lin (2003) have also utilized the fuzzy
technique to both model and controller design of six-DOF AMB system. Based on
the nonlinear conical AMB model reported in the work by Mohamed and Emad
(1992), Takagi-Sugeno fuzzy model of this system is developed which facilitates the
fuzzy controller design. In this work, the controller objective is to attenuate the
tracking error of the rotor to be below a predefined prescribed bound. This is
achieved by using a Lyapunov-like function where the solution is found to be

35
solvable through the use of LMI technique. The controller output of this controller is
the magnetic force and it is assumed that the input current is able to supply the
required controlled force and the simulation results verify the control effectiveness.
This work is further continued in (Huang and Lin, 2005) by including the imbalance
in AMB model. To overcome the imbalance vibration, a so-called imbalance
compensator is integrated with the fuzzy controller in which robust system
performance in tracking rotor position is achieved although with the present of the
imbalance and bounded external disturbance.
NN method in the controller formulation of AMB system is found mostly in
finding the bound of the uncertainties that present in the system and this bound
further is used for the design of other model-based dynamic controller. The objective
of using this intelligent uncertainties estimation technique is usually to produce less
conservative controller output. Buckner (2002) has used the NN method, specifically
2-sigma network to identify the bound of the uncertainties by estimating the
difference between a nominal system model and actual system (modeling error) or
normally called as confidence interval. The estimation of the confidence interval
represents the uncertainties model where the bound is used for finding the controller
gain of SMC type controller. Similarly, in Lu et al. (2008), this method is used to
find the LPV controller and in Gibson et al. (2003) for robust H∞ controller.
In finding the best or so-called ‘optimum’ controller parameters values that
meet various system requirements, many methods have been proposed. The heuristic
method of tuning the parameters based on the output of the system usually gives
satisfactory results but might be laborious if there are too many parameters to be
considered. Besides mathematical-based optimization technique, GA seems to offer
quite a nice solution in finding the controller parameters values. In Schroder et
al.(2001), on-line GA method is used to tune a H∞ controller and for fuzzy based
controller, it is reported in the work done by Lin and Jou (2000). In both of these
works, on-line GA tuning algorithm is utilized and the results confirm the AMB rotor
can achieve robust rotor stabilization under predefined system operating range with a
comparably slower settling time.

36
1.3 Summary of Existing Control Methods for AMB System
Based on this survey and discussion, the research work in controlling AMB
system is driven into many directions involving modeling and designing control
techniques for various kinds of system configurations that meet certain requirements
of applications. Undoubtedly, the existence of many nonlinearity effects related to
the rotor dynamics and electromagnetic have imposed great challenge in designing
effective control algorithm that is able to produce a promising control performance
and viable for practical use. The dynamic model of the system that mathematically
represents the actual physical system is formed in numerous structures in which these
equations serve an important design tool before any controller can be developed.
Based on this review, there are many established models that have been developed
and are found to be more than adequate for the development of the controller
algorithm. In the realm of linear control, the most favored approach is to linearize
these nonlinear models at an operating point and linear control method is synthesized
such as PI, PID or LQR control. Unsatisfactory performances are usually observed
when the system deviates from the operating point which indicates the need of more
robust control algorithm. The H∞, Q-parameterizations LPV and µ controllers have
been proposed to overcome this weakness in which the variation of the system
parameters, nonlinearity effects and disturbances are treated as uncertainties and
structurally included in the design process. A significant improvements in term of
system performance can be noticed where minimization of predefined performance
indices is achieved and good system responses attained. As reported in many works,
however, these robust control techniques based on nominal system model still shows
degradation in performance when the uncertainties are ill-defined.
The use of nonlinear control methods seems a natural choice that can provide
a more complete consideration of the parametric uncertainties, nonlinearities and
disturbance present in the system while providing desirable system performances at
wider range of operational speed. The model-based feedback linearization and
backstepping control techniques have proven to give good system performances in
many AMB system and the controllers are mostly cascaded with another linear of
nonlinear robust controller to ensure the robust performance is attained in various
system condition. This multi-loop control algorithm is resulted due to the fact that

37
these control methods are rather sensitive to the error in the system modeling which
produces residual effect that affects the closed-loop performance.
The intelligent based control also seems to offer a good solution in achieving
good rotor stabilization and rejection of harmonic disturbance in AMB system. The
adaptation of model-based control design techniques such as Lyapunov method and
LMI has improved the design method where stability in certain operating range can
be guaranteed. While this method is more on classifying the input and output
relationship of the AMB system based on cognitive reasoning and scientific
observations, establishing the input-output relationship based on experimental set-up
seems to be more promising to design more effective intelligent-based controller that
guarantees global stability of the system is achieved.
In the family of nonlinear robust control techniques for AMB system, SMC
has shown to be capable of providing robust rotor positioning in wide range of
system condition even with the present of parametric uncertainties, nonlinearities and
disturbance. In recent years, the adaptations of many linear and nonlinear system
design tools in the development of SMC control algorithm have enabled this
controller type to accommodate various systems and design requirements
systematically. This has offered a promising research contribution especially in the
area of AMB control system. While the modeling techniques of AMB system is
considered quite an established research field, the challenge remains in reconfiguring
or rearranging the existing model in a certain structure in such a way that the major
nonlinearity effects such as gyroscopic effect, nonlinear electromagnetic force and
imbalance are appropriately represented. With the inclusion of this nonlinearity
effects, the AMB model can be formed as a class of dynamic system that is suitable
for the design of a dynamic robust controller.
1.4 Research Objectives
The objectives of this research are as follows:

38
I. To formulate a mathematical model of a nonlinear five DOF AMB system
under Class A current input mode in state variable form. The complete
model will be obtained by integrating the rotor dynamics and the
nonlinear electromagnetic coils with the inclusion of gyroscopic effect,
imbalance and nonlinear electromagnetic force.
II. To transform the nonlinear model of the AMB system into a class of
nonlinear uncertain system comprising the nominal values and the
calculated bounded uncertainties. These structured uncertainties exist due
to the available limit of the airgap between the rotor and stator, its speed
and variation in the rotor rotational speed.
III. To propose a new robust control algorithm technique based on
deterministic approach for uncertain system. Particularly, SMC control
technique will be utilized in the design where a new multi-objective
sliding surface and robust continuous control law will be formulated.
IV. To implement the newly proposed controller into the mathematical model
of AMB model so that the robustness of the new controller can be
accessed. In particular, the effectiveness in minimizing the airgap
deviation at various rotor speeds will be highlighted.
Verification on the stability and the reachability of the proposed controller
will be accomplished by using the well-established Lyapunov’s second method. The
performance of the AMB system will be accessed through extensive computer
simulation performed on MATLAB platform and SIMULINK Toolbox as well as
customly-developed LMI interface and solver which are YALMIP and SeDuMi.
1.5 Contributions of the Research Work
The following are the main contributions of the study:

39
I. A new representation of the nonlinear AMB model as a class of
nonlinear uncertain system has been formulated which can
accommodate the design of the controller.
II. New design algorithm for sliding surface that can accommodate many
performance objectives in convex formulation. The solution can be
systematically obtained by using LMI technique which produces the
desired sliding surface parameter.
III. New design algorithm of a continuous SMC control law that is able to
eliminate or attenuate the chattering while the reaching condition is
guaranteed. Together with the sliding surface developed in I), a new
complete SMC controller is established in which the control
parameters can be parameterized systematically.
IV. Application and validation of this new robust controller on AMB
system by extensive computer simulation.
1.6 Structure and Layout of Thesis
This thesis is organized into five chapters. In Chapter 2, the formulation of
nonlinear models of 5-DOF AMB system is presented. Firstly, the dynamic of the
rotor with force input in state space representation is illustrated. By defining the
airgaps as the new state variable to be controlled, a geometric transformation is
performed and a new state-space model of rotor is produced. Then, the nonlinear
electromagnetic with current inputs is established and integrated with the rotor
dynamic model to reach the complete AMB dynamic state-space model. Next, the
AMB system is treated as a class of uncertain system. Based on the known allowable
range of operation of the system and the maximum rotor rotational speed, the
minimum and maximum uncertain bounds can be calculated to form a model with
nominal and bounded uncertainties. This class of uncertain model representation
serves the basis for the formation of the robust controller.
Chapter 3 presents the proposed new robust control strategy for AMB system
based on SMC approach. The design method is composed of the sliding surface
design and control law design. Since the inherited uncertainties satisfy the matching

40
condition, the stability of the sliding mode is guaranteed and this is proven by using
Lyapunov method. LMI design technique is adapted in the surface design such that
multi-objective sliding surface can be constructed. The designed surface not only
fulfills the stability criterion, but is also able to minimize the desired optimal
performance index. Then, a continuous SMC control law based on exponentially
convergent boundary layer is developed in which the reaching condition is met while
the chattering effect is eliminated or attenuated. A chattering performance index is
shown to quantify the effectiveness of the proposed method.
In Chapter 4, various simulation results will be presented to evaluate the
performance of the controller on the AMB system. Particularly, the performance of
the system is evaluated when the parameter of the designed sliding surface and the
control law are varied. In addition, the robustness of the system when there exist
some variations in the system parameter is also covered. The performance is assessed
from the characteristic of the system response as well as from the newly developed
performance indices. To show the effectiveness of this new controller, the
performance of the AMB system with the two other SMC controller types developed
by other researchers are also included for benchmarking.
The summary of the results of the studies is presented in Chapter 6.
Recommendations of possible future direction or continuations of this work are also
covered in this chapter.

197
CHAPTER 2
MODELLING OF ACTIVE MAGNETIC BEARING SYSTEM 2.1 Introduction
Effective controller design relies on sufficiently accurate mathematical
description of the physical system. The mathematical representation of dynamic
system, or synonymously called as the model of the system, serves usually two
important objectives: 1) to represent the actual physical system such that the
verification of the system performance can be accessed through rigorous digital
simulation work, 2) to provide a structural form for the synthesis of any new control
algorithm. The purpose of control of AMB system is to maintain the dynamic
response of the rotor in accordance with pre-specified objectives. The performance
of the AMB system thus corresponds directly on the efficacy of the control algorithm
and the ‘closeness’ of the model to the actual physical system.
Generally, the model of the AMB system is formed by the dynamic of the
rotor and the electromagnetic coils that act as the actuator of the system. AMB
system is known to be highly coupled, nonlinear and open-loop unstable. The
nonlinear force-to-current/airgap, speed dependant gyroscopic effect and imbalance
are considered as the major contributing factors that result in poor system
performance and worse yet cause instability to the system, if improperly handled. In
addition, secondary nonlinear effects such as eddy current, flux leakage, fringing flux
and finite core permeance also contribute towards degradation of system
performances. The magnitudes are however relatively much smaller and mostly can

42
be eliminated during fabrication stage. i.e. thinly laminated material used to
eliminate eddy current effect.
In many of the research works in formulating dynamic controller, the
nonlinear AMB model is linearized at an operating point and the imbalance is
introduced into the system as external disturbance force. An imbalance elimination
method is then proposed and cascaded with any linear controller to form a complete
dynamic controller of the AMB system as shown by Shafai et al. (1994), Lum et al.
(1996), Shi et al. (2004), Herzog et al. (1996) and Bi et al. (2005). As covered in
Chapter 1, these techniques are proven to provide satisfactory system response and
effective unbalance compensation, however, it is mostly valid at approximately close
to the linearized region and the effect of gyroscopics and nonlinear electromagnetics
on the performance can be indistinctly illustrated. Therefore, nonlinear control
techniques developed based on nonlinear AMB model with more inclusively
describing the nonlinearities are then proposed by many research groups to ensure
satisfactory system performance can be achieved at wider range of system operations
(Chen and Knospe, 2005; Bartoszewics and Patton, 2007; Levine et al. 1996).
In this chapter, the detail formulation of the integrated dynamic model of
AMB system in state variable form is demonstrated. The integrated nonlinear model
is comprised of the dynamic of the rotor and the Class-A current-input
electromagnetic coils that result in a more accurate representation of the actual
system which includes the nonlinear force-to-current/airgap, gyroscopic effect and
imbalance. By using deterministic approach, the AMB model is treated as a class of
uncertain system that is composed of the nominal and the uncertain structure where
the uncertainties are calculated based on the known bound of the system parameters
and the state variables. This newly re-arranged AMB model serves as the basis of the
nonlinear controller design.
2.2 Rotor Dynamic Model
The fundamental equations of motion of rotor is derived by using the
principle of flight dynamic and the early work of the model derivation of horizontal

43
cylindrical rotor is shown in (Matsumura and Yoshimoto, 1986; Matsumura et al.,
1990; Matsumura et al.,1996). By following the same steps outlined in these works,
the rotor dynamic model of the AMB used in (Hassan, 2002; Mohamed and Emad,
1993) is re-derived and represented in state-space model, as reported in Husain et al.
(2007a). Figure 2.1 shows a simplified cross sectional view of the AMB system
viewed from x-z plane. The rotor is levitated and controlled by four pairs of
electromagnets and the axial control is performed separately by the axial magnetic
bearing. The input to the electromagnets is the current il1, il2, il3 and il4 on the left
bearing and ir1, ir2, ir3 and ir4 on the right bearing where each of the energized coils
will generate the required electromagnetic forces fl1, fl2, fl3,fl4 (left) and fr1, fr2, fr3 and
fr4 (right), respectively. The airgaps at each of the bearing, gi ( i = l1, l2, l3, l4, r1, r2,
r3, r4), are to be maintained such that no contact between the rotor and bearing to
occur.
In deriving the equations of motion, the rotor is treated as a rigid floating
body with a moving frame of reference (GXrYrZr) is attached to its center of mass
G(xo,yo,zo) and a fixed frame (OXsYsZs) is presumed to attach to the geometry center
of the stator as shown in Figure 2.2. The translation and rotation of the rotor can be
described by the three-dimensional motion of the moving frame GXrYrZr. This
motion can be viewed more effectively by defining three intermediate moving
Figure 2.1 Cross section view of cylindrical horizontal AMB system
from x-z plane
The electromagnets l3, l4, r3 and r4 are perpendicular to this view
gr1
il1
il2
ir1
ir2
fl1
fl2
fr1
fr2
G(xo,yo,zo)

44
Figure 2.2 Free-body diagram of AMB rotor
frames, namely: GX1Y1Z1 ({1}), GX2Y2Z2 ({2}) and GX3Y3Z3 ({3}). Frame {1} is
obtained by the translation (xo,yo,zo) of the OXsYsZs from the geometric center of the
stator to the center of the rotor mass G and the xo,yo and zo is respectively the
component of x-, y- and z- coordinate of G with respect to O. Frame {2} is obtained
by rotating frame {1} about the Y1-axis with angle θ, and frame {3} is obtained by
rotating frame {2} about Z2-axis with and angle β. Then, the frame GXrYrZr can be
described by the rotation about the X3-axis with the rotational angle ρ. Thus, based on
(Lewis et al., 1993; DeQuiroz et al., 1996b), the floating and rotating rotor can be
represented by 4×4 homogeneous transformations matrices , k = 1, 2, 3, 4, where
the position and orientation of the rotor with respect to the fixed stator frame
OXsYsZs can be described as:
fl1
fl2
fl3
fl4
fr1
fr2
fr3
fr4
θ, Nf
β, Mf
z, Zf
y, Yf
l
l
l1
l2 l3
l4 O
Zs
Xs Ys
Zr
Yr
Xr
G(xo, yo, zo)
OXsYsZs – fixed frame (stator) OXrYrZr – moving frame (rotor)
r1
r2 r3
r4
ρ,Lf x, Xf
fxl
fxr

45
(2.1)
where
1 0 00 1 00 0 10 0 0 1
,
0 00 1 0 0
0 00 0 0 1
,
0 00 0
0 0 1 00 0 0 1
,
1 0 0 00 00 00 0 0 1
and θ , β and ρ are the Euler angles (pitch, yaw, roll). The transformation matrix (2.1)
describes the exact motion of the rotor frame with respect to the fixed stator frame.
However, as highlighted by Matsumura and Yoshimoto (1986), since the airgap
distance is significantly smaller than the rotor length, the deviation of angles θ and β
are negligibly small. In addition, the deviation of rotor mass coordinate G (xo,yo,zo)
from the center of the stator, O, is in fact only in the order of 10-5 of the rotor length.
With these assumptions made, the transformation matrix that is adequate for this
model can be treated as follows:
1 0 000
(2.2)
Then, based on Figure 2.2, define Xf, Yf and Zf and Lf, Mf, and Nf forces
exerted on the rotor and the moments around the axes of the moving frame,
respectively. By using the linear and angular momentum principles to the AMB
system, the following set of equations of motions for the rotor can be obtained to be
as follows (Matsumura and Yoshimoto, 1986):

46
(2.3)
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
where
m : mass of the rotor (kg)
Jx : the moment of inertia around Xr (kg.m2)
Jy : the moment of inertia around Yr (kg.m2)
, , : linear velocity components with respect to rotor axis (m/s)
, , : angular velocity components with respect to rotor axis (rad/s)
These equations reflect all the six DOF of movement of the rotor and since the
rotation around the Xr axis is supplied by external rotating mechanism, the equation
containing the torque Lf given by equation (2.6) will subsequently be eliminated from
this derivation. Furthermore, as it is assumed that the pitch and yaw angles are
effectively small, the relationship between the linear and angular velocities with the
coordinates of rotor mass center and angles of rotation can be established to be:
1 0 000
(2.9)
1 0 000
(2.10)
By taking the derivative of (2.9) and (2.10), the following relationship can be
established:
(2.11)
(2.12)
(2.13)

47
(2.14)
(2.15)
(2.16)
The equations (2.3) - (2.8) and (2.11) - (2.16) are the terms derived based on the
moving rotor frame. Thus the forces from the electromagnets based on stator frame
(OXsYsZs) need to be transformed into the variables in the moving rotor frame
(GXrYrZr). From Figure 2.2, the forces generated by the electromagnetic coils in the
stator and exerted on the rotor can be established as follows:
Fx = fxl – fxr – – 2γ + fdx, (2.17)
Fy = + fl3 – fl4 + fr3 – fr4 + fdy, (2.18)
Fz = + fl2 – fl1 + fr2 – fr1 + fdz + mg. (2.19)
where
Fx, Fy, Fz : forces acting on the x-, y- and z- axes, respectively (N)
: radial eccentricity coefficient (N/m)
: axial eccentricity coefficient (N/ m)
: axial damping coefficient (kg/ s).
Similarly, the torques that acts around the fixed axes can be formed to be:
Tx = Tm – ζp – To, (2.20)
Ty = (fl2 – fl1 + fr2 – fr1 + fdθ) × l, (2.21)
Tz = (fl3 – fl4 + fr3 – fr4 + fdβ) × l, (2.22)
where
Tx, Ty, Tz : torques acting around the x-, y- and z- axes, respectively
(N.m)
l : the half rotor length (m)
Tm : torque supplied by external motor (N.m)
To : the Coulomb friction torque (N.m)
ζ : torque damping coefficient (N.m.s)

48
The terms fdx, fdy and fdz in the forces equations (2.17)-(2.19), and fdθ and fdβ in the
torque equation (2.21)-(2.22) are the disturbance forces and torques that act on the
associated axes. In this work, these terms are used to classify the unbalance forces
that exist due to imbalance of the rotor and based on (Mohamed et al., 1999; and
Matsumura et al., 1990), the imbalance can be represented as:
fdx = fex, (2.23)
fdy = cos , (2.24)
fdz = sin , (2.25)
fdθ = cos , (2.26)
fdβ = sin , (2.27)
where
: mass of unbalance (kg)
: radial distance of the unbalance mass from center of geometry (m)
τ : inertia inclining angle with respect to Xr (rad)
κ, λ : initial angular values (rad)
fex : unknown external disturbance along x axis (N).
Usually, the unbalance mass, mo and the radial distance of imbalance, are hard to
be identified. Instead, the so-called static imbalance is used which is defined as
.
In order to transform these forces and torques to the moving rotor frame, the
transformation matrix (2.2) is used and the equations forces and torques produced
are:
1 0 000
– – – 2 – –
– –
(2.28)

49
1 0 000
– – – – . – – .
(2.29)
Then, by substituting (2.11) – (2.16) into (2.3) - (2.8) and equating these equations to
(2.28) and (2.29), respectively, the following five highly nonlinear equations of motion of
the rotor are established as:
– – – 2 (2.30)
– –
– – (2.31)
– –
– – (2.32)
– – (2.33)
– – . – –
. (2.34)
= – – . –
. (2.35)

50
With the abovementioned assumptions in which the airgap between the rotor and the
electromagnets are much smaller than the rotor length, all the variables except
rotational speed and displacement, and ρ respectively, have insignificant effect on
the rotor dynamic and quickly achieve steady-state value of zero and consequently,
the second order terms can be eliminated. With these assumptions, the rotor dynamic
equation with respect to the forces exerted by the stators (2.30)-(2.35) can be
effectively represented as:
– – (2.36)
– – (2.37)
– – (2.38)
– – (2.39)
There are two important points to be noticed from these equations which are: 1) The
dynamic equations are linear in term of its motion but nonlinear in relation to the
electromagnetic forces and the imbalances, 2) The gyroscopic effects, and
cause the pitch and yaw motions to be coupled and the coupling effect is proportional
to the rotor rotational speed, . Also notice that the motion in the x- axis is not
included since it is shown by (2.32) that the dynamics is independent to other axes
and the control can be performed separately.
Then, define a 8×1 state vector of the system as
(2.40)
where
Then equation (2.36) - (2.39) can then be written in state variable form as

51
, (2.41)
or similarly in smaller partitioned matrix as
(2.42)
where
0 0 0
0 0 00 0 0 00 0 0 0
,
0 0 0 00 0 0 00 0 0
0 0 0
,
0 0
0 0
0 0
0 0
,
0 0 0
0 0 00 0 1 00 0 0 1
,
,
cos sin
cos
sin
,
and is 4×4 zero matrix and is 4×4 identity matrix.
From the control point of view, it is preferable to have the gap deviations as
the state variables of the system instead of the coordinate of the mass center and the
yaw and pitch angles of the rotor. This is due to the fact that the gap deviations are
easier to be measured than the rotor mass center either by using sensors or by
designing observers Matsumura and Yoshimoto (1986). The gap between the
electromagnets and the rotor can be expressed as follows:

52
, 1, 2, 3, 4, 1, 2, 3, 4 (2.43)
where is the steady state gap length at equilibrium and is the airgap deviation
from steady state value . Figure 2.3 is the exaggerated view of the movement of
the rotor in z-axis viewed from x-z plane. This figure shows the geometric
relationship between the airgap and the center of the rotor G, in which the
mathematical relationship can be established. The number in the circle illustrates the
Figure 2.3 Movement of rotor in z-axis.
sequence of the rotor position that is possible to occur during the movement. From
position 1 to position 2, the rotor will be displaced by zo, which is equivalent to the
total displacement of the rotor mass. Then from position 2 to position 3, the rotor is
rotating about it center of geometry by an angle θ. Based on this movement the total
displacement of the rotor at the right end side which represents the gap deviation is
·
(assuming for small angle) (2.44)
Similarly, the displacement of the rotor at the left end side will be the same except
that the rotation movement will cause negative displacement. The equation of the
airgap deviation on the left side is as follows:
(2.45)
After considering the movement of the rotor in all axes, the expressions of all the
airgap deviations of the rotor and electromagnets can be represented in vector form
as:
l
θ
1
zo
3
2 G

53
(2.46)
The gap deviations (2.46) can be transformed into state variable form as
(2.47)
where
0 1 00 1 01 0 01 0 0
(2.48)
With equations (2.47) and (2.48), the state transformation of rotor dynamic equation
(2.42) can be performed so that the gap deviations are treated as the new states
variables for the system equation and the new system state variable can be
represented as:
= (2.49)
The terms , , and can conveniently be obtained by performing the
transformation. However, it is intentionally not shown here since the system equation
(2.49) will be further integrated with the electromagnetic dynamic equation and the
element of these matrices will consequently change.

54
2.3 Electromagnetic Equations
There are two ways to model the dynamic of electromagnetic coils which are
using force-to-flux/airgap or force-to-current/airgap relationships. Based on
(Mohamed and Emad, 1993), the force-to-flux relation for the dynamic coil is used
due to the fact that both the force and flux depend inversely to the time varying
airgap, and this simplifies the derivation of the model. However, to make the system
more feasible for control application, coil currents should be used as the control input
instead of flux, since controlled flux is difficult to be generated in hardware set-up.
Thus, in this model, by following the method outlined by Huang and Lin (2005), the
relationship between electromagnetic forces to flux is first considered and later the
flux term is replaced with the flux-to-current relationship. In deriving the model for
electromagnets, a few standard assumptions are made which are:
i) reluctance of iron is neglected with respect to gap reluctance
ii) stator and rotor core are laminated and hence eddy current is
neglected
iii) all magnets have identical structure
The electromagnetic force fi produced by ith electromagnet is expressed in
term of the airgap flux, and the airgap width, can be expressed as follows
(Mohamed and Emad, 1993; Huang and Lin, 2005):
1 , 1, 2, 3, 4, 1, 2, 3, 4 (2.50)
where k is a proportional constant and h is the width of the electromagnetic pole.
Assuming that the coils are driven by current power source, the relationship between
the airgap, , coil current, and the airgap flux, is given by:
, 1, 2, 3, 4, 1, 2, 3, 4 (2.51)
where
: permeability of free space

55
: effective area of each magnetic coil
: number of coil turn
It can be observed from (2.50) and (2.51) equations that the electromagnetic forces
generated is proportional to the square of the flux, and correspondingly to the
current. This non-affine input relationship imposes as one of the controller design
difficulties that causes many linear controllers fail to give good performance as the
linearized regime is exceeded (Hsu et al., 2003; Li, 1999).
2.4 AMB System as an Integrated Model
In order to form the AMB dynamic model with current input, the rotor
dynamic equations (2.49) needs to be integrated with the electromagnetic dynamics
(2.50) and (2.51). It should be noted that the equation (2.49) is in the matrix form
while the equation (2.50) and (2.51) is in time-varying scalar form of the ith coil. In
order integrate these equations, (2.49) needs to be expanded and the dynamic for the
l1, r1, l3 and r3 coils are given as:
(2.52)
2 2 2 2
(2.53)
(2.54)
2 2 2 2
(2.55)

56
where the terms associated with imbalance becomes
sin cos (2.56)
sin cos (2.57)
cos sin (2.58)
cos sin (2.59)
and , .
Then, by substitution of (2.50) and (2.51) into each of (2.52) – (2.55), produces
(2.60)
(2.61)
(2.62)

57
(2.63)
In this work, the Class A control mode is used where the coil currents are composed
of bias current and control current in which differential winding of the coil is used to
meet this purpose. Then, the coil currents are defined as:
(2.64a)
(2.64b)
(2.65a)
(2.65b)
(2.66a)
(2.66b)
(2.67a)
(2.67b)
where
: control current on vertical motion on the rotor left
: control current on vertical motion on the rotor right
: control current on horizontal motion on the rotor left
: control current on horizontal motion on the rotor right.
It can be noticed directly that by having differential current mode, the control inputs
can be reduced to four inputs instead of eight inputs, as used in nonlinear controller
for Class C mode.

58
Before the new current input equations (2.64a) – (2.67b) are substituted into
the integrated AMB model (2.60) – (2.63), in order to simplify the derivation of the
model, the following terms are established:
(2.68)
(2.69)
(2.70)
(2.71)
(2.72)
(2.73)
(2.74)
(2.75)
Then, the current equations (2.64a) – (2.67b) can be substituted into the dynamic
equations (2.60) – (2.63), and after expanding the square term of the currents, the
integrated dynamic equations can be re-cast as:
2 2 2 2
+
,
2 2, ,
2 2, ,

59
, ,
(2.76)
2 2 2 2
+
,
2 2, ,
2 2, ,
, ,
(2.77)
2 2 2 2
,
2 2, ,
2 2, ,
, ,
(2.78)

60
2 2 2 2
,
2 2, ,
2 2, ,
, ,
(2.79)
Notice that the new dynamic equations (2.76)-(2.79) have been rearranged such that
each equation contains the terms , , , , and , ,
where 1, 1, 3 and 3. By grouping all the , ’s, , , ’s
and , , ’s, then, a new state-space model of the nonlinear AMB system
with the controlled current as the system input can be shown as:
, , , , , (2.80)
or, equivalently
, , , , ,
(2.81)
where
(2.82)

61
(2.83)
0 0
0 0
0 0
0 0
, ,
0 0
0 0
0 0
0 0
(2.84)
, ,
0 00 0
0 00 0
, , ,
(2.85)
2 2
2 2
2 2
2 2
2 2
2 2
2 2
2 2
(2.86)
(2.87)

62
The highly nonlinear coupled AMB model (2.80) can be viewed as a class of
nonlinear system in which the elements of the system matrix, , , are function of
the varying rotor speed, , the elements of the input matrix, , , , are functions
of state variables and the input vector, and the elements of the ‘disturbance’ vector,
, , , are dependent to the states and the rotor speed, .
2.5 AMB Model as Uncertain System
The model (2.80) developed in the previous section is highly nonlinear for the
development of dynamic controller. It is necessary to decompose the system into a
structure that is suitable for the synthesis of the controller which performs the control
action within the given allowable range of the system operation. As initially
proposed by Osman (1991), and adapted in (Ahmad, 2003), the approach of treating
the AMB nonlinear model as a class of uncertain system is considered in this work.
Defined that the uncertain dynamical system for this AMB system is represented as:
∆ , ∆ , , , , (2.88)
where and are the nominal constant matrices while ∆ , and ∆ , ,
with their respective element ∆ , and ∆ , , are considered as the
matrices of the uncertainties. Also, the vector , , with the elements
∆ , , is still treated as the disturbance vector. The uncertain elements
∆ , and ∆ , , is defined to belong to uncertainty bounding sets and
shown as follows:
∆ , ; , | ∆ , (2.89)
∆ , , ; , | ∆ , , (2.90)
where the values of the constant and are assumed known and available.

63
Since all the system parameters, the range of airgap and its deviation speed as
well as the ranges of rotational speed are known, the bound of the elements of the
matrices , and , , can be computed to be in the following form:
, (2.91)
, , (2.92)
where , , and , , are the ij-th element of , and ik-th
element of the , , , respectively. The upper and the lower bars of the
inequalities are defined as the maximum and minimum values of each component.
Consequently the element of the constant matrices and can be determined as:
2⁄ (2.93)
2⁄ (2.94)
The element of the matrices ∆ , and ∆ , , can be obtained as:
∆ , (2.95)
∆ , , (2.96)
As for the vector , , , the element ∆ , , is considered as the
maximum values of each element and can be computed as:
∆ , , (2.97)
With the available system parameters and system operating range, all of these values
(2.91)-(2.97) can be calculated off-line.
Table 2.1 tabulates the parameter values for the system while Table 2.2
shows the range of operation of system variables, control input and rotor operational
speed obtained from (Mohamed and Emad, 1993; Mohamed et al., 1999; Huang and
Lin, 2004)

64
Table 2.1 Parameters for AMB system
Table 2.2 Range of state variables, input and rotor speed
Variables Allowable operating ranges
Airgaps deviation 0.550mm 0.550mm,
1, 2, 3, 4, 1, 2, 3, 4
Rate of change of airgap speed
0 1.87m/s,
1, 2, 3, 4, 1, 2, 3, 4
Control Input 0 1.0 ,
, , ,
Rotor speed 0 1883rad/s 18000
Based on the values from these two tables and by using (2.91)-(2.97), the calculated
values for nominal matrices and , and the nonzero elements of the ∆ , ,
∆ , , and , , are given as follows:
Symbol Parameter Value Unit m Mass of Rotor 1.39 × 10 kg Ag Effective area of coil 1.532 × 10-3 m2 Jx Moment of Inertia about X 1.34 × 10-2 kg.m2 Jy Moment of Inertia about Y 2.32 × 10-1 kg.m2
Steady airgap 5.50 × 10-4 m Ib Bias Current 1.0 A l Distance between Mass centre
to coil 1.30 × 10-1 m
Rotor radial eccentricity 1.0 N/m μo Permeability of free space 4π × 10-7 H/m N Number of coil turns 400 h Pole width 0.04 m k Proportional Constant 4.6755576 × 108 N/Wb2
Static imbalance 1.0 × 10-4 kg.m τ Dynamic imbalance 4.0 × 10-4 rad

65
0 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 1
0.04 0.04 0 0 0 0 27.3135 27.31350.04 0.04 0 0 0 0 27.3135 27.3135
0 0 0.04 0.04 27.3135 27.3135 0 00 0 0.04 0.04 27.3135 27.3135 0 0
0 0 0 00 0 0 00 0 0 00 0 0 0
254.372 1.440 0 01.440 254.372 0 0
0 0 254.372 1.4400 0 1.440 254.372
0 0 0 0 900.6104 900.3659 897.5015 898.3322
54.627 , , , , , , , 0
0 , , , , , , , 54.627
0.053 , , , , , , , , , , , 508.797
1.731 , , , , , , , , , , , 4.611
2.6 Summary
In this chapter, the complete derivation of the integrated AMB dynamic
model has been presented. The developed model includes the dominant nonlinearity
effects in AMB system namely gyroscopic effect, imbalance and nonlinear
electromagnetic force. For the formulation of the design of dynamic controller, the
AMB model is treated as uncertain system in which based on the known physical
parameters, the allowable range of the system operation, range of control input and
rotor rotational speed, the system and input matrices of the model are rearranged into
its nominal and nonlinear uncertain parts. Also, for the disturbance vector, the
maximum values of each element are considered. The used of the deterministic
approach to form the model that is appropriate for controller design has given the

66
advantage that the model can be easily adapted to cater any other modeling
uncertainties, as long as the bound is known. The final system representation is used
as the basis for the synthesis of the controller presented in Chapter 3.

197
CHAPTER 3
MULTI-OBJECTIVE SLIDING MODE CONTROL 3.1 Introduction
One of the most distinguished features of Variable Structure Control (VSC) is
its ability to provide robust system performance even with the present of system
uncertainties and disturbance. When the uncertainties and disturbances satisfy the so-
called matching condition in which they are in the range space of the input, the
system possesses the invariant property which means the system is completely
insensitive to these uncertainties and disturbances. This invariance is a much stronger
property than robustness and this has made VSC to be recognized as one of the finest
controller design in robust control family for many classes of nonlinear dynamic
system (Hung et al., 1993; Young et al., 1999; Edwards and Spurgeon, 1998;
Hassan, 2002; Bastoszewicz and Patton, 2007).
It is generally known that the transient dynamics of VSC system consists of
two modes which are known as sliding mode and reaching mode. When the system is
in the sliding mode, the dynamic motion of the system states are confined to a
designed sliding surface and asymptotically reach a predefined stability region at
steady state. During this sliding motion the merit of invariant property comes into
play where the response of the system response is solely dictated by the dynamic of
the sliding surface and it is ‘immuned’ to any matched uncertainties and disturbance.
In the reaching mode, the system states trajectory is driven to the sliding surface
from an initial point by a switched feedback control law and the trajectory is to
maintain a sliding motion given that the surface has been designed in prior. In this

68
mode, the system possesses no sensitivity property and the most common approach
taken to improve the system robustness is by using high-gain feedback control
(Utkin, 1992). In order to maintain the sliding motion, an ideally infinite switching
control law is required so that the structure of the system can be intentionally
changed to obtain the desired system behaviours (DeCarlo et al. 1988). To further
illustrate controller dynamics, by following the notation in (Edwards and Spurgeon,
1998) it is defined that the sliding surface for the system to be as follows:
Sl = Im
i
liS
1=
(3.1)
| 0 (3.2)
where is the state vector of the system. Then it is obvious that the sliding
surface which establishes the sliding motion is formed by the intersection of m
sliding planes as shown in Figure 3.1.
Since the surface is linear, the sliding surface is just a straight linear line. By using a
third-order system ( = 3) with two inputs ( = 2) given in (Choi, 1998), both of the
reaching and sliding modes can be graphically demonstrated. By using the same
surface design (3.1), the trajectory of the states of the system, x1, x2 and x3 are 3-
dimensionally illustrated in Figure 3.2 in which from an initial point A(-2,1,2), the
01 =lS
02 =lS
(xo, to)
Sliding surface - 021 =∩= lll SSS
Figure 3.1 Illustration of sliding that exists at intersection of two sliding surfaces.

69
states are driven to achieve asymptotic stability point C (0,0,0) in finite time by
following the path A → B → C. The curvy path A → B represents the reaching mode
in which all the states are forced by a switched control law to be attracted to a sliding
surface formed by an intersection of two sliding planes started at point B. Then, once
the states hit the sliding surface at B, the sliding mode starts and the states remain on
the surface until the asymptotic stability point C is reached. In order to maintain the
sliding mode, an infinite-frequency switching input is used as shown in Figure 3.3.
This high frequency switching causes a so-called chattering phenomenon but it is yet
necessary to preserve the robustness of the system, although it causes many practical
limitations and implications.
Based on this illustration and as covered in most of the VSC and SMC related
literatures included in the reference, the procedures in designing VSC can be broken
down into two phases which are the sliding surface design and the feedback control
law design. The design of the sliding surface entails the construction of switching
surfaces so that the system restricted to the surfaces meet desired closed-loop system
Figure 3.2 States trajectory of third-order system given in (Choi, 1998)
-4
-2
0
2
-1-0.5
0
0.51-1
-0.5
0
0.5
1
1.5
2
x1x2
x3
A
B
C

70
Figure 3.3 Chattering phenomena due to infinite switching control law
criteria while in second phase, a switched feedback control law is constructed such
that the states trajectory of the system are forced to be attracted to the design surface
and maintain the sliding mode once the surface is reached. Thus, in this research
work, the design of sliding surface and the switched control law are covered in detail
in the following sections of this chapter which forms the main contribution of this
work.
There are many sliding surface types exist in order to accommodate variety of
design requirements. Linear sliding surface as defined by (3.2) is the most commonly
used surface structure and can be considered as the earliest reported in literature
(Utkin, 1977). It further develops as one of the most established sliding surface type
and adapted in many research works due to its linearity which offers flexible design
procedure, nonetheless, produces desirable control performances (Edwards and
Spurgeon, 1998; DeCarlo et al., 1988; Hung et al., 1993). Thus, many linear control
design method can be adapted straightforwardly to construct the surface, for instance,
robust pole placement and Linear Quadratic (LQ) minimization method (Edwards
and Spurgeon, 1998; Young and Ozguner, 1997). Pole assignment of system poles in
sliding mode is also done by using geometric approach (El Ghezawi et al. 1983) and
the work is further continued with the use of algebraic approach in the surface design
0 2 4 6 8 10 12 14 16 18 20-4
-3
-2
-1
0
1
2
3
4
time, t [sec]
Inpu
t, U
Control Input

71
(Huang and Way, 2001b). Many other more advance linear design techniques are
also applied to meet the required response of the closed-loop system. For example,
H2 (Takahashi and Peres, 1999), H∞ (Takahashi and Peres, 1998; Diong and
Medanic, 1997) and Riccati-based quadratic stability (Kim et al. 2000) methods are
adapted to attenuate the effect mismatched uncertainties and disturbance present in
the systems that might disrupt the sliding motion.
Another type surface structure that has also been considered in sliding surface
design is integral sliding surface in which an integral term is added to the linear
surface (3.2) and the surface can be represented as follows:
SPI = Im
i
PIiS
1=
(3.3)
| 0 (3.4)
It can be notice that with the presence of the integral term in (3.4), a nonlinear sliding
motion will result in sliding mode. Among the objectives of introducing the
additional integral term are to eliminate steady-state error when the system reach
sliding mode (Laghrouche et al. 2007; Utkin and Shi, 1996) and also to provide
predictable system behaviour from the initial time until the system reach the sliding
surface (Cao and Xu, 2004; Choi, 2007). This is proven to be advantageous for VSC
design since the system robustness is guaranteed starting from the initial time of the
system as opposed to the linear sliding surface in which the robustness is attained
only during the sliding mode. The trade-off to these improvements, however, with
the additional parameter in the integral term, there are lack of systematic design
procedures to choose the best combination of the sliding parameters such that the
desired system requirements are met. The most common approach taken is to
iteratively adjust the parameters according to the output until the desired system
response is met (Ahmad and Osman, 2003; Cao and Xu, 2004; Laghrouche et al.,
2007). It may induce a relatively higher input energy than the conventional sliding
when driving the system trajectory from initial point until the sliding motion is
induced on the surface due to the second order structure of switched control law
(Jafarov, 2005).

72
Since the design of VSC requires the exact dynamic model of the system, this
imposes a restrictive condition in the design procedure for some application where
formulation of mathematical model that represents the actual system is difficult to
obtain. One of the solutions to overcome this constraint is to use PID sliding surface
in which the well-develop PID design procedure is adapted such that the desired
system response is met (Stepanenko et al., 1998; Jafarov et al. 2005). The system
under PID VSC shows that a faster response can be attained but up to now it has only
been applied to a class of robot manipulator systems.
With the emergence of application of LMI in control system, the design of
sliding surface has also substantially benefited from this powerful tool in which the
design procedures can be conveniently reformulated as an LMI problem. LMI is a
convex optimization problem where many problems arising from system and control
theory can be represented as LMIs with convex constraints and it can be solved
efficiently with interior-point technique (Boyd et al. 1994; Scherer and Weiland,
2004). The design of sliding surface for a system with matched uncertainties by
using LMI is initially introduced by (Choi, 1997) such that the reduced-order system
achieves asymptotic stability. Then, the works in formulating set of LMIs to
overcome the effect on mismatched uncertainties in dynamic system has also
surfaced in the literatures (Sellami et al., 2007; Choi, 1998, Hermann et al. 2001;
Farrera, 2005). In (Takahashi and Peres, 1998), the H∞ norm is used to bound the
effect of mismatched uncertainty and the work is further extended by using H2 norm
to solve the similar mismatched problem (Takahashi and Peres, 1999) in which both
of the sliding surfaces designs are formulated in term of LMIs. It can be noted that
most of design methods proposed considers only a single design objective to be
fulfilled. However, the convexity property of LMI has offered the possibility of
formulating multiple design objectives in the sliding mode (Kim and Park, 2004)
since in the sliding motion, the system behaves as a linear system and the established
linear system theory can be conveniently adapted (Chilali and Gahinet, 1996).
However, finding Lyapunov matrix solution that satisfies the multiple constraints is a
challenging issue in multi-objective design approach. One of the approaches used to
accommodate this difficulty is to assume that the LMI variables for multiple
constraints are common and the solution can be found by solving LMI sets
simultaneously. Although some conservatism is introduced, the solutions mostly fall

73
into the acceptable range of design requirement (Kim and Park, 2004; Scherer et al.
1997; Chilali and Gahinet, 1996; Chilali et al. 1999). Alternatively, some iterative
methods are also proposed, however, the convergence of the algorithm is not
guaranteed for all class of problems (Kim and Jabbari, 2000; Kim and Park, 2004). It
is also highlighted in these references that the multi-objective design imposes new
design challenges but the advantage it offers outweighs the design difficulty and it
sets the future direction in designing control system.
In the design of VSC feedback control law, there are two main factors that
affect the final structure of the law which are the choice of the sliding mode entering
scheme and the free-choice or pre-assigned structure of the control law (Hung et al.,
1993). These two factors are essentially intertwined as can be seen in the design
process, however, in any of the cases, the ultimate goal in the design is to construct a
control law that is able to drive the system trajectory to the sliding surface and to
maintain the desired sliding motion. This is achieved in such a way that the designed
control law satisfies the reaching condition. For the design of control law, there exist
three commonly taken approaches which are 1) hierarchical control method, 2)
diagonalization control method and 3) pre-specified controller structure approach. In
the hierarchical control method, or equivalently named as fixed-order switching
scheme, the determination of control law requires finding the solution of -pairs of
inequalities that prescribes the sliding surface dynamics which is proven to be a
difficult task and the solution is mostly very conservative (Hung et al. 1993; DeCarlo
et al. 1988; Edwards and Spurgeon, 1998; Farrera, 2005). The more recent approach
in the construction of VSC control law is by using diagonalization control method
where in this scheme, a nonsingular transformation is introduced to form a diagonal
matrix such that each i-th component of control law depends only on the i-th
component of switching function (Edwards and Spurgeon, 1998). With this newly
mapped relationship between the sliding surface and control law, it forms
independent SISO systems which simplify the task of finding the solution. In the pre-
specified design approach, the structure of the controller is pre-assigned at prior
according to the standard controller structure and the reachability condition is tested
to verify the convergence of the system states to the sliding surface. The most
popular types of controller structures are as follows (Hung et al. 1993; Utkin, 1992;
Decarlo et al. 1988):

74
i) Relay control: , 0, 0 (3.5)
for 1, , . The values for the gain +ik and −
ik can be chosen to be
a fixed constant value or state-dependent scalar function as long as the
reaching condition is satisfied. This function is equivalent to signum
function when the magnitude of the gain is 1 which forms an ideal
relay control.
ii) Linear feedback with switched gains:
(3.6)
where Π is an × state-dependant gain matrix and it
should be chosen to satisfy the reaching condition. This approach can
be treated as general technique of designing the control law by using
reaching law method in which the reaching-law-type reachability
condition is used. It produces a relatively simple controller structure
however in the design process, higher order of differential model of
the system is required (Hassan and Mohamed, 2001; Gao and Hung,
1993)
iii) Augmentation of equivalent control:
∆ (3.7)
where is the equivalent sliding mode control that maintain the
sliding motion and ∆ is a so-called nonlinear control term to ensure
that the reachability condition is met. The simplest form of the
nonlinear control term is the use of relay type control (3.5), but it
exists in variety of form in order to meet design requirement.

75
The adaptation of the any of these controller structures depends significantly
on the class of system model and the condition of the design requirements that need
to be fulfilled. In some cases, two or more structures of controllers can satisfy a
particular control system design, however, the conservatism of the produced
controller remains as the restriction to which controller structure is of the optimum
choice for the application of interest (Jafarov, 2005).
Another important issue in designing the VSC control law is the elimination
of the chattering effect caused by the infinite frequency discontinuous control signal.
As it has been established that the discontinuous signal is crucial in VSC in which its
function is to switch between two distinctively different structures such that the
sliding motion exists. However, it involves high control activity which may excite
neglected high-frequency dynamics in the system and also to cause possible damages
to the actuators. On the other hand, eliminating the chattering also has other
drawbacks in which the robustness of the system may be sacrificed. Many methods
have been proposed to overcome the issue such that a continuous control term is used
to replace the discontinuous term. The most commonly used method is to replace the
discontinuous signum function, sgn(·), with saturation function, sat (·), or to use
boundary layer technique (Chen et al., 2002; Zhang and Panda, 1999; Lee and Utkin,
2007). These methods are proven to be advantageous in eliminating, or at least
minimizing chattering to a certain acceptable degree, but at the expense of the
robustness property of SMC. Besides, both of these methods require the use of thin
boundary layer around the sliding surface in which its magnitude determines the
control accuracy. The larger the boundary layer width, the smoother the control
signal, however, it no longer drives the system to the origin, but to within the chosen
boundary layer instead. These conflicting requirements to fulfill, which are the
smoothness of the input signal and the control accuracy, have attracted many
research works to propose methods that can overcome the chattering effect while
retaining the property of the SMC and this has made the study in elimination of
chattering in SMC remains vital and relevant field of research (Young et al. 1999,
Lee and Utkin, 2007; Chen et al. 2005a)
Following the development of VSC, in this chapter, the design of multi-
objective linear sliding surface that minimize quadratic performance of the system

76
while retaining the poles in a convex LMI region is presented. Then, a new SMC
control law is constructed such that the reaching condition is met and the states are
constraint to the newly designed sliding surface. For completeness of the SMC
control design, time-varying boundary method is adapted in the control law to
replace the high-chattering sgn(·) term so that the resulted new controller will be
more practical. The formulation of the problem and some standard assumptions are
presented in the following section.
3.2 Problem Formulation
Consider an uncertain system described by
∆ , ∆ , , , , (3.8)
where and represent system states and control signal vectors,
respectively, while and are nominal constant matrices of appropriate dimensions.
∆ , and ∆ , , are uncertainties that present in the system and input
matrices, respectively. , , represents other nonlinearities and disturbance in
the system.
The following assumptions are made and considered valid for the following study:
i) All the states are fully observable;
ii) There exist continuous functions , , , ,
, and , , such that for all , , :
∆ , ,
∆ , , , ,, , , ,
(3.9)
iii) There exist known positive constants Δ , Δ and Δ such that for all
, , :

77
, Δ ;
, , Δ ; (3.10)
, , Δ ;
iv) The pair ( , is controllable.
Assumptions ii) assures that all the uncertainties present in the system lie in the range
space of the nominal input and meet the matching condition. With the structural
assumption iii), based on (Huang and Way, 2001b), the all matched model
uncertainties can be lumped and the system can be written as
, , , (3.11)
where , , , is the lumped matched uncertainty. Further assumption is made
for the system as follows:
v) There exist a known positive scalar-valued function such that
, , , (3.12)
By using the linear type sliding surface (3.1), define the sliding surface as
: 0 (3.13)
where is a full rank matrix to be designed such that is nonsingular and
the reduced order equivalent system, when restricted to the sliding surface
, has the desired closed-loop dynamics.
Suppose that for a given surface , the controller is assumed to have the
following structure

78
(3.14)
where
(3.15)
(3.16)
and is a positive definite matrix and is a symmetric positive
definite matrix. is the controller term comprising the so-called equivalent
control, which is necessary to maintain the sliding motion (Hung et
al. 1993; Edwards and Spurgeon, 1998), and the additional term
which is introduced for the design of the sliding surface. The nonlinear control term
is required to overcome the uncertainties present in the system and to drive
the system states to the design surface. The controller is supposed to satisfy the
reachability condition such that 0 for 0 which would result in the
sliding mode. i.e. 0 for some 0 where is the time surface is reached.
The detail design of the controller is covered in section 3.4.
For the design of the sliding surface, the matched uncertainty in (3.11) is
treated to be zero since it will be effectively eliminated by the control law (DeCarlo
et. al. 1988; Edwards and Spurgeon, 1998). Thus, the system (3.11) is transformed
into regular form by using non-orthogonal coordinate change and the procedure is
highlighted in detail in (Edwards and Spurgeon, 1998; Edwards, 2004). After the
coordinate transformation, the system matrices for system (3.11) have the following
form:
, (3.17)
where . The structure of the input matrix is different from
the regular form used in most of the works, in which in this formulation the matrix
. In this coordinate system, the surface can be proposed to be as follows:
(3.18)

79
where and is nonsingular matrix. Assume that the
partition of the states associated with the canonical of form (3.17) is .
When the system in sliding mode, 0. Thus,
(3.19)
Substituting (3.19) into the system in the canonical form (3.17) the reduced order
system produced is
(3.20)
Based on (3.20), it is obvious that the sliding motion of the reduced order system is
governed by . There are many methods proposed to choose the
parameter such that the dynamic motion on the sliding surface meets certain
performance. The most common technique is the used the pole-placement method
such the all the desired poles of (3.20) are on the left-hand plane to ensure stability
(Ogata, 2001; Edwards and Spurgeon, 1998; Dorf and Bishop, 1995). Also, the
Linear Quadratic Regulation (LQR) technique (Edwards and Spurgeon, 1998) and
LMI (Choi, 1997) have also been adopted for the design of the surface. However, all
of the methods are applied only to the system associated with the regular form used
in (DeCarlo et al. 1988; Utkin, 1992; Edwards and Spurgeon, 1998).
Since the system has the matched uncertainty, the control law in the form
(3.14) with the switching term (3.16) is able to overcome the uncertainty and attract
the system states to the sliding motion. Once the sliding motion is induced, only
effort arising from the linear term (3.15) contributes to the energy needed to maintain
sliding mode with desired reduced-order system dynamics. Following the method in
(DeCarlo et. al. 1988; Edwards and Spurgeon, 1998), by letting the

80
uncertainty , , , 0, the necessary control effort to maintain sliding motion
with dynamic (3.20) is
(3.21)
which is the restatement of (3.15). Based on this exposition, the objective of the
sliding surface design can be stated as follows:
Objective 1: For a given value of , find the sliding surface parameter in (3.18)
such that the following conditions are met:
i) The control effort arising from the linear control term (3.21) which
maintain the sliding motion minimizes the cost function of the form
(3.22)
where and are given symmetric semi-definite
matrices.
ii) All the poles of the reduced-order system (3.20) are required to
lie in the LMI region such that
, , (3.23)
where is the eigenvalues and the , , in the complex domain
is defined as:
, , | Re 0, Re Im |
(3.24)
and shown in Figure 3.4.

81
The advantages of constraining the poles in LMI regions are the transient response of
closed-loop system can be systematically characterized and the tractability of finding
the solution is guaranteed through many efficient LMI algorithms. The polynomial
regions of pole clustering are also developed by many other researchers but the
synthesis of controller is hardly tractable due to its polynomial in nature (Chilali et
al. 1999).
Once the above sliding surface has been constructed, the next phase of the
design is to design a control law such that the reaching condition is met and the
sliding condition is maintained. Taking into consideration the chattering problem
VSC and the robustness of the system is attained in sliding mode, the development of
VSC control law is given as follows:
Objective 2: For a given class of system (3.11), design a continuous VSC control
law in the form of equivalent control (3.14) such that the system states are attracted
to the surface (3.13) and the sliding motion is retained for subsequent time.
3.3 Multi-objective Sliding Surface
In this section, the development of the sliding surface that meets the objective
1 will be discussed in detail.
Re
Im
c2
Figure 3.4 LMI region for pole-placement
c1

82
3.3.1 Optimal Quadratic Performance
In fulfilling objective 1, let and is chosen to be a negative constant
such that it does not belong to the spectrum of system matrix . This is to avoid
singularity problem as can be seen in the following design procedure. If is
chosen, with this special selection of , the linear controller (3.21) can be recast as
follows:
(3.25)
where and is the design parameter. Consider a change of
coordinate such that . Then, the system and input matrix
and can be restructured in this new coordinate system to be in the form
respectively:
(3.26)
(3.27)
Post-multiply (3.26) by ,
(3.28)
This is only true when . Thus in this new coordinate, based on (3.28) the
system matrix is still preserved and is shown as follows:
(3.29)

83
Expanding (3.27) will result
(3.30)
The linear gain for the controller (3.25) becomes
(3.31)
Thus, with new system and input matrices (3.29) and (3.30), respectively, under the
linear state-feedback control with gain (3.31), the closed-loop system becomes
(3.32)
where it is obvious that the eigenvalues are . In order to
proceed with the design of the surface that meet objective 1, the canonical form in
(3.29)-(3.30) is used as the basis to represent the system such that
(3.36a)
(3.36b)
(3.36c)
(3.36d)
where , is exogenous disturbance, is the output energy
with its associated and matrices. This system can be illustrated by Figure 3.5
where G represents the system dynamics (3.36a) and under the static state feedback
control (3.36d), then the resulting closed-loop system can be described as

84
(3.37)
(3.38)
For the LQ cost function (3.22) with and being the matrices that penalize the
cost of the states and control input of the system, it can be shown that by
using this new system representation, based on (Boyd et al., 1994), the minimization
of this cost function is equivalent to minimizing the norm of the output energy
and this problem can be formally represented as:
(OP 1): Determine the feedback constant such that the norm of output
energy is minimized where the output energy is given by (3.36c).
This can be achieved by using Cholesky factorization (Chen, 2000; Anderson and
Moore, 1990), where it can be deduced that
/ / , / / (3.39)
By defining the following matrices
/
, / (3.40)
G
Figure 3.5 Block diagram for representation of equation (3.36)

85
Then, it can be further shown that
(3.41)
By defining matrices and as (3.40), then 0 which agrees with common
assumption made for LQ optimal state-feedback controller design (Anderson and
Moore, 1990). By using this statement ( 0) and (3.40), the equation (3.41)
can be deduced to be as follows:
//
//
(3.42)
where the LQ cost function (3.22) can be equivalently stated as
(3.43)
as stated by optimization problem (OP1). Based on this result, the following Lemma
can be introduced for the LQ problem.
Lemma 1. (Iwasaki et al., 1994; Zhou et al. 1996)
For the given system, let ℓ > 0. If there exists the stabilizing controller such that
is asymptotically stable and the LQ cost function ℓ, then there
also exists a positive definite matrix such that
0 (3.44)
(3.45)

86
Proof: This is a standard and well established fact and the proof has been shown in
many literatures such as (Iwasaki et. al., 1994; Bosgra et al. 2007; Saberi et al.1995;
Zhou et al., 1996)
Lemma 1 is the solution to the problem (OP1) and it states that if there exists the
feedback controller for the system (3.36) which results the closed-loop system to
be as (3.37)-(3.38), then there is always possible to find matrix that fulfills (3.44)
and (3.45) wherein the norm is bound by the given positive value ℓ. It can be noticed
that the controller does not depend on the exogenous disturbance , instead, the
associated matrix only presents in the norm expression (3.45).
In the above formulation, the evaluation of the LQ cost is taken as the worst-
case cost which indicated by the norm bound of (3.45). Instead of taking the worst-
case cost, it can be evaluated over the ‘average’ of the cost by replacing the norm
constraint of (3.44) with the constraint which describes the H2 norm bound
(Chen, 2000; Yang and Wang, 2000; and Skogestad and Postlethwaite, 2005;
Iwasaki et al., 1994). The more detail discussion on LQ and H2 control can be found
in these established references and the sufficient background materials that are used
to arrive at the result of this work are included in Appendix B. Then, the optimization
of the LQ problem (OP1) can be represented as an H2 norm optimization problem
can be stated as follows:
(OP 2): Let ℓ > 0. Find the stabilizing controller gain that solves the H2 state-
feedback control problem iff there exists a positive definite matrix such
that
0 (3.46)
(3.47)
In order to find the controller gain , the standard solver for Riccatti equation can be
used iteratively until the Lyapunov matrix is found (Boyds et al. 1994, Zhou and
Doyle, 1997, Iwasaki et al., 1994). In this work, instead of using the Riccati solver,
the optimization problem (OP2) will be cast a convex optimization problem in which

87
it can be effectively represented as a Linear Matrix Inequality (LMI) problem and the
solution can be numerically found by using its advance interior point algorithm
(Boyds et al. 1994; Nesterov and Nemirovsky, 1994). Another major advantage of
formulating the problem (OP2) as an LMI problem is due to the convexity property
of LMI in which many LMI sets can be represented as a single LMI and solved
simultaneously to yield the optimal desired solution (Hermann et al. 2007; Scherer et
al. 1997; Chilali and Gahinet, 1996).
To continue with the design, by defining , by pre- and post-
multiplying (3.46) with , the inequality can be represented as
0
0
0
0 (3.48)
Then, define with be a full row rank matrix such that
. By using Schur complement, equation (3.48) can be formed as LMI as follows:
/
/0 (3.49)
where Schur complement can be found in Appendix A. Thus, the solution to the
optimization problem (OP2) can found by solving LMI sets:
Minimize:
Subject to
/
/0
(3.50)
0 (3.51)

88
with respect to the decision variables and in which (3.50) equals to (3.49)
effectively.
Looking at (3.50), the LMI is not convex in term of the LMI variables and
and this requires a transformation such that convexity can be achieved. The usual
method applied to obtain convex representation of (3.50) is to use change of variable
method (Gahinet and Apkarian, 1994; Boyd et al. 1994). However, the
method does not work for this case since the reverse transformation to recover
may not necessarily guarantee the structure of the controller gain (3.31)
can be preserved, which further will lead to inaccurate value of . Thus, to proceed
with the design, a structural assumption on the solution of the Lyapunov matrix is
made such that
(3.52)
where and . Then a new variable based on this
matrix structure can be defined as
(3.53)
where . Following the method in (Boyd et al., 1994), a new ‘slack’
variable is introduced as the upper bound of the trace matrix to be minimized such
that
(3.54)
Then, (3.54) can be expanded to be an LMI using Schur complement as follows:
0 (3.55)

89
Then, combining (3.50), (3.51) and (3.55), the minimization problem of (OP2) now
becomes as follows:
Minimize:
Subject to
/
/
(3.56)
(3.57)
0 (3.58)
with respect to decision variables , and . With this formulation, the Objective
1 i) which is to find the controller gain M that minimizes the cost function (3.22) is
achieved by solving the LMI sets (3.56)-(3.58). In order to meet the Objective 1 ii)
such that the M will also able to place the poles of the reduced-order closed loop
system (3.20) to be in a robust LMI region (3.24), the these LMI sets will be
augmented to include this stability requirement and the derivation is discussed in the
following section.
3.3.2 Robust Constraint Pole-placement in Convex LMI Region
For many practical problems, exact pole assignment may not be necessary,
however, it is sufficient to locate the closed-loop poles in a prescribed region or sub-
region in the complex left-hand plane (LHP). In contrast to general stability region
which is to place the poles of the system in open LHP, LMI regions which belong to
sub-regions of the LHP can be established to meet desired transient response of the
system such as the delay time, rise time, settling time and maximum overshoot which
are demonstrated by (Arzelier et al., 1993; Chilali and Gahinet, 1996; Hong and
Nam, 2003). This is proven to be advantageous since by formulating the pole-
clustering problem into LMIs, it can be conveniently combined with other design

90
restrictions which are also formed as LMIs and the solution can be found by solving
the whole LMI sets simultaneously.
As outlined in the objective of this work, the second criterion that has to be
met is to ensure the poles of the closed-loop reduced-order system to lie in the LMI
region , , as defined by (3.24). In order to establish the LMI region, a few
essential definitions and lemmas derived in previous works are restated as follows:
Definition 1. ( Chilali and Gahinet, 1996)
A subset of the complex plane is called LMI region if there exist a symmetric
matrix and matrix such that
: 0 (3.59)
where the characteristic function is given by
:
, (3.60)
and takes values in the space of Hermitian matrix.
This definition describes that an LMI region is a subset of the complex plane
in which it can be represented by an LMI in complex number, z and z where z = x +
jy and z is its complex conjugate. Among the basic regions of the closed-loop poles
that can be sufficiently characterized are vertical plane and strip which includes the
open LHP region, horizontal plane and strips, and conic sectors that are symmetric
with respect to real axis (Mackenroth, 2004; Chilali and Gahinet, 1996). There are
also many other higher-order region can be defined such as ellipses, parabolas and
hyperbolic sectors but quadratic matrix inequality stability regions need to be
structured (Henrion, 2007, Chilali and Gahinet, 1996).
However, if pole location in a given LMI region is characterized in terms of
block matrix , by using the result obtained from (Gutman and Jury, 1981),

91
the characteristic function (3.60) that describes the LMI region in term of complex
number can be conveniently represented in the block matrix as stated in the
following theorem.
Theorem 1. ( Chilali and Gahinet, 1996; Gutman and Jury, 1981)
The matrix is -stable if and only if there exists a symmetric matrix
such that
, 0 (3.61)
and 0 (3.62)
where
,
,
(3.63)
and is the Kronecker product defined by
(3.64)
Proof: The detail proof can be found in (Chilali and Gahinet, 1996; Gutman and
Jury, 1981)
By looking at the characteristic function (3.60) and block matrix (3.61),
there is a direct relationship between the two equations in which they are related by
direct substitution , , 1, , (Chilali and Gahinet, 1996). This is
proven to be very convenient in which most of the LMI regions described by using
characteristic function (3.60) can be transformed into block matrix which
appropriately matches with design procedure of this work. Then, a definition and
property of LMI are introduced as follows to facilitate the design.

92
Definition 2. (Mackenroth, 2004)
A matrix is called – stable if all its eigenvalues lies in .
With this definition, it is known that – stability is defined such that when
there exists a sub-region in complex LHP as described by (3.24), then the system
matrix is called – stable i.e. all the poles lie in the sub-region described by
the LMIs. Thus, when is just the entire open LHP, then the – stability coincides
with the usual stability definition which characterizes in LMIs by Lyapunov theorem.
i.e. and is the Lyapunov matrix.
Property 1. (Chilali and Gahinet, 1996)
Intersection of any LMI region and is also an LMI region such that
and the characteristic function is given by
, (3.65)
This property follows from convexity property of LMI in which two or more
LMIS can be represented as single LMI cascaded diagonally and this is proven to be
very powerful in LMI-based problem representation (Boyd et. al. 1994; VanAntwerp
and Braatz, 2000). Then, in order to design the LMIs for the stability region (3.24),
as it is difficult to express the region with classical representations, the use of
Property 1 is found to be convenient to define the region in which the regions are
formed by in intersection of a vertical strip with c1, and c2 as the upper and lower
bound, respectively, and a conic sector with angle θ and symmetric with real axis.
Based on (Gutman and Jury, 1981; Henrion, 2007; Mackenroth, 2004; Chilali and
Gahinet, 1996), the characteristic function for vertical plane and conic sector are
given as follows:

93
Vertical plane region: z| Re z (3.66)
and characteristic function is given as
2 (3.67)
Conic sector: z| Re z 0, Re |Im |
(3.68)
and characteristic function is given as
(3.69)
Based on Theorem 1 and (3.66)-(3.69), then by defining 0 as a Lyapunov
matrix, the LMI region (3.24) thus can be established as follows:
LMI region , , :
2 0 (3.70)
2 0 (3.71)
0
(3.72)
To further simplify the LMIs, by using Property 1, the LMI region (3.70)-(3.72) can
be recast as:

94
LMI region , , :
2c2c
s cc s
0
(3.73)
where s and c . It can be noticed that the Property 1 is a very
useful in such a way that many LMIs can be cascaded diagonally to form a single
LMI in which finding the solution numerically will be more tractable (Scherer and
Weiland, 2004).
3.3.3 Solution of Multiple Criteria Using Convex LMI
The solution to find the sliding surface which meets the outlined objectives
which are minimized control efforts in term of cost function (3.22) and constraint
closed-loop poles of the reduced order system in a robust LMI region (3.24), the
solutions have formally be developed and represented as LMI sets (3.56)-(3.58) and
LMI (3.73), respectively. The LMI variables for these set of LMIs which are , ,
and are not directly related to produce the common solution. However, since
matrix is defined such as (3.52), then it is directly known that in which it
is just a sub-variable of , and the convexity is preserved. To this end, the problem
of finding the sliding surface parameter for the reduced order system (3.20), which
meets the design Objective 1, is reduced to find the solution to the following
optimization problem:
Minimize:
Subject to:

95
/
/ (3.74)
22
s cc s
0
(3.75)
(3.76)
0 (3.77)
To solve this LMI problem, instead of using the LMI Toolbox available in Matlab
software package, the Yalmip/SeDuMi LMI solver developed by (Lofberg, 2004;
Sturm, 1999) is used which produce less conservative solution (Henrion, 2007).
3.4 Sliding Mode Control Law Design
The next phase of the SMC design is to propose a switched control law such
that the reaching condition is met and the sliding motion is maintained. In this
section the construction of the SMC control law that meets Objective 2 outlined at
the beginning of the chapter.
3.4.1 Fast-reaching Sliding Mode Design
It is known that the robustness of the SMC is attained when the system is in
sliding motion, while during the reaching phase, the system is still subjected to

96
influence of uncertainties and disturbance. One of the ways to improve the
robustness of the control law is to shorten the reaching phase such that the sliding
motion can be induced as soon as possible in order gain the merit of the invariant
property of SMC. Hence the following theorem proposes the new controller to
achieve this objective.
Theorem 2. Given a class of uncertain system (3.11), the reaching condition
0 is satisfied by employing the control law given below:
(3.78)
where is a positive design matrix and is a small positive constant.
Proof. Given the uncertain system (3.11), the reachability condition evaluates to
, , ,
, , ,
, , ,
, , ,
—
, , ,
, , ,
, , ,
Then, from assumption v),

97
0
Thus, the condition 0 and this completes the proof.
Notice that with the selection such that and , the reachability
condition is in the form of inequality
(3.79)
In comparison to the normal reachability condition , for
SMC controller (3.78), the extra nonlinear term improves the reaching time
such that the reaching time is shorter compared to the reaching time under ideal SMC
in which the structure of the ideal sliding mode is given as follows (Edwards and
Spurgeon, 1998; Hung et al., 1993):
(3.80)
where is the surface parameter and is the nonlinear controller gain
where is a reasonable design assumption.
The following lemma proves this fact.
Lemma 2. The reaching time tn of the new controller (3.78) is smaller than the
hitting time tc of the ideal SMC controller.
Proof. Let tc be the required time for the ideal SMC controller to reach the sliding
surface 0. Then under this controller, the reaching condition is
. To simplify the proof, replace the inequality of the reaching condition
with equality. Then, integrating this term between t = 0 to t = tc produces

98
0 0
(3.81)
since and 0.
Let tn be the required time for the new SMC controller (3.78) to reach the sliding
surface 0. Solving the differential equation of the reaching condition (3.79)
leads to
Again, removing the inequality and taking the Laplace transform of the above
equation yields
0
0
0
0
Taking the inverse Laplace transform the above relation produces

99
0
0
0
0 1
Then, let 0 and , thus
0 1
0
1
1
By using the well known relation ln 1 , then it can be deduced that
1
which completes the proof.
The linear term of controller (3.78) is
(3.82)
Rearranging (3.82) such that

100
(3.83)
and this is equal to (3.21) in which it is in the structure that is appropriate for the
design of the sliding surface, where .
3.4.2 Chattering Eliminations Using Continuous Exponential Time-varying
Boundary Layer
The controller proposed in Theorem 2 contains infinite switching frequency
due to the term which produces the undesirable
chattering effect. As discussed earlier, the most common method to attenuate this
chattering effect is to replace the sgn (·) function with saturation-type function, sat
(·), which is defined as follows (Zhang and Panda, 1999):
, | | 1
, | | 1 (3.84)
Adapting this sat(*) for the controller (3.78), the high-frequency term becomes
, 1
, 1 (3.85)
where is the thickness of boundary layer matrix of suitable dimension introduced
around the sliding surface. It can be noticed that once the system states are inside the
boundary layer, i.e. 1, the function remains as the switching
function which maintain the reachability condition. Then, once the states are inside
the boundary, the control law becomes a smooth continuous time-varying function.
The trade-off of this method is that the introduction of the boundary layer can only

101
guarantee the system to reach uniformly ultimate boundedness, instead of asymptotic
stability, which produces finite steady-state error (Liang et. al., 2007; Kim et. al.,
2006; Buckholtz, 2002).
Another boundary method layer technique used to remove the chattering is to
introduce the boundary layer permanently from the initial point of the trajectory as
follows (Yao and Tomizuka, 1994; Edwards and Spurgeon, 1998; Sam et al., 2004;
Ahmad and Osman, 2003):
(3.86)
where vector containing small positive values which serve as the boundary layer
thickness for appropriate surface. Notice that the main difference between method
(3.85) and (3.86) is that in (3.86), the continuous function replaces the high-
frequency term since the initial states trajectory motion while for (3.85), the
continuous function starts once the trajectories are inside the defined boundary layer.
This implies that the method (3.86) eliminates the chattering effect during both the
reaching phase and also while the states remain inside the boundary. On the contrary,
for method (3.85) chattering is alleviated only when the states are inside the
boundary. In term of the steady-state error, however, both of these methods
introduced steady-state error in which the magnitude is dependent to the boundary
layer thickness. In order to overcome this shortcoming, instead of having a constant
boundary thickness, an exponentially convergent boundary function can be
introduced in which in finite time, once the boundary function reaches zero, the
steady-state error is eliminated and asymptotic stability can be achieved. In
consequence, the controller (3.78) proposed in Theorem 2 can be improved and a
new chattering-free controller is suggested as follows:
Theorem 3. For the given class of uncertain system (3.8), the reaching condition
0 is still satisfied by employing the control law given below:

102
(3.84)
where is a positive design matrix , is exponentially decaying
boundary layer, is a design vector such that 1 1 , , and
are small positive constants.
Proof. In similar line of proving Theorem 2, by using the same reachability
condition, then
, , ,
, , ,
, , ,
, , ,
, , ,
Then, form assumption v), the inequality is further deduced to
Simplify the term as follows:

103
Thus, the reachability terms reduces to
From this reachability inequality, it is obvious that the terms and are negative
definite. However, for the term , it is obvious that 0 exponentially
since 0 and thus, which proves the states are driven to the sliding
surface. This completes the proof.
It is known that the chattering effect has caused significant use of input
energy and unnecessary for most application. In order to quantify the improvement
obtained by this newly proposed controller in term of eliminating the chattering, an
index to gauge the controller performance is introduced as follows:
Total energy consumed :
where tf is the final simulation time. Notice that index Te evaluates the total energy
consumption by the controller. This so-called chattering index will be used in the
next chapter as the chattering elimination obtained under this controller scheme in
which the lower the value is the less chatter is observed.
3.5 The Proposed Controller Design Algorithm
Based on the design method outlined above, the step-by-step procedure to
find the surface parameter and the controller gain that meet the objectives outlined is
presented as follows:

104
Step 1: Verify the class of uncertain system with uncertainty, , , ,
, , ,
Step 2: Find the transformation matrix, using QR decomposition method.
, .
Step 3: Perform the transformation on the nominal system equation.
,
to form new nominal system equation
,
Step 4: Perform change of coordinate to system
equation in Step 3 and the controller gain,
,
,
and the closed loop system becomes
Step 5: Formulate LMI to solve Objective 1 i).
Minimize:
s.t.:
/
/

105
0
Step 6: Formulate LMI to solve Objective 1 ii).
2c2c
s cc s
0
Step 7: Formulate complete LMI sets combining LMI in Step 5 and LMI in
Step 6 with .
Step 8: Choose design parameters , , , , and and solve LMI in
Step 7 for solution ( , , and )
Step 9: Calculate multi-objective sliding surface parameter.
Step 10: Calculate the linear controller term.
where .

106
Step 11: Complete controller design by choosing , , and for nonlinear
controller term.
where , and are parameters for chattering elimination.
3.6 Summary
In this chapter, the detail procedure for the design of a new sliding mode
controller for a class of uncertain system with matched uncertainties is outlined. The
complete controller design includes the design of new sliding surface that can
accommodate multiple objectives defined as convex LMI sets. Specifically for this
work, the surface is designed to fulfill optimal quadratic performance and robust
LMI pole clustering region. The optimal surface is characterized such that the system
trajectories that reside on the surface satisfy the optimal trade-off between the state
performance and input energy used determined by design parameters. For the robust
LMI pole clustering region, the dynamic of sliding motion is ensured to be stable in
which the poles resides in the LMI defined region. For the control law development,
a new continuous sliding mode controller that ensures reachability condition is met
and while asymptotic stability is guaranteed by using an exponential decaying
boundary layer thickness. The complete design of this sliding mode control law is
suitable with the AMB model developed in Chapter 2 and the assessments of the
performance is carried out in Chapter 4 through extensive simulation work.

197
CHAPTER 4
SIMULATION RESULTS AND DISCUSSION 4.1 Introduction
The main objectives of this chapter are to simulate the newly proposed multi-
objective sliding mode controller (MO-SMC) that is applied to the AMB system
model developed in Chapter 2 and to assess the performance of the controller. In
order to meet these objectives, extensive simulation works using MATLAB with
SIMULINK® is performed and the response characteristics of the AMB system as
well as the controller outputs under various systems configurations and parameter
variations are illustrated. To solve the LMI sets, an LMI interfacing software,
YALMIP, is used and the LMI solver, SeDuMi, is installed as the numerical solver to
find the LMI solution. YALMIP is compatible with MATLAB solution and thus, the
MATLAB environment is used to run the YALMIP which eases the simulation
process. To prove the robustness and effectiveness of the newly proposed MO-SMC
in controlling the AMB system to meet the desired system performances, the results
of the simulations are compared with the ideal sliding mode controller (I-SMC) and
continuous sliding mode controller (C-SMC) developed in (Lee et al., 2003). The
necessary preparations needed for the simulations are outlined in the following
section.

108
4.2 Simulation Set-up and System Configuration
In order to apply the MO-SMC represented by equation (3.84), by following
the design algorithm outlined in section 3.5, a coordinate transformation is needed
such that the uncertain AMB model equations (2.88) can be transformed into a new
system representation in the form of equation (3.17). To achieve this transformation,
the well-known QR-decomposition technique based on (Edwards and Spurgeon,
1998) is used to obtain the transformation matrix , and based on the nominal input
matrix the calculated matrix is calculated as follows:
0 0 0.0031 1.000 0 0 0 00 0 1.000 0.0031 0 0 0 0
0.0031 1.000 0 0 0 0 0 01.000 0.0031 0 0 0 0 0 0
0 0 0 0 0.0039 0 0 00 0 0 0 0 0.0039 0 00 0 0 0 0 0 0.0039 1.237 100 0 0 0 0 0 1.237 10 0.0039
(4.1)
One may notice that the elements of the nominal input matrix depends on the bias
current in which the matrix will also be affected by the different selection of .
However, the change of the calculated matrix for the range of 0.8 A < < 1.8 A is
in the magnitude of 10-4 which the changes in matrix does not contribute any
significant effect on the result of this work. Thus, for this calculation, = 1.0A is
used. The transformation of the original system into this new coordinate system
should not alter the dynamic of the system, but it is purely intended for the controller
design. The singular value test as shown in Figure 4.1 confirms that after the
coordinate change, the original system property is preserved.
The new nominal system and input matrices shown by equation (3.17) can be
obtained by performing the transformation and given as follows:

109
0 0 0 0 1 0 1.600 254.3770 0 0 0 0 1 254.377 00 0 0 0 1.600 254.377 1 00 0 0 0 254.377 0 0 10 0 0.0001 0.0001 0 0 27.310 27.3100 0 0.0001 0.0001 0 0 27.310 27.310
0.0001 0.0001 0 0 27.310 27.310 0 00.0001 0.0001 0 0 27.310 27.310 0 0
(4.2) 0 0 0 00 0 0 00 0 0 00 0 0 01 0 0 00 1 0 00 0 1 00 0 0 1
. (4.3)
Notice that the structure of new input matrix as imposed by the design procedure
(Step 3) outlined in Chapter 3 is obtained in this transformation.
Figure 4.1 Singular value test of the system in original and transformed coordinates
10-10
10-5
100
-200
0
200
400SV for original system
Frequency (rad/sec)
Sing
ular
Val
ues
(dB)
10-10
10-5
100
-200
0
200
400SV for transformed system
Frequency (rad/sec)
Sing
ular
Val
ues
(dB)

110
In order to perform the next coordinate change to construct the LMI sets in
equation (3.74)-(3.77) in which the solutions obtained will provide the desired
sliding surface parameters, the design parameter, , should be defined. The
parameter can be varied as long as its value is not equal to any of the eigenvalues
of to avoid singularity error in finding the LMI solution. The discussion on the
influence of the variation of on the performance of the system is discussed in detail
in the following section, however, = -1000, is defined as the nominal design
parameter. With this value of , the system and input matrices given by equation
(4.2) and (4.3), respectively, can be restructured into the new coordinate system
(3.29) and (3.30). The matrices are:
(4.4)
1 0 1.600 254.2770 1 254.277 0
1.600 254.277 1 0254.277 0 0 1
1000 0 27.310 27.3100 1000 27.310 27.310
27.310 27.310 1000 027.310 27.310 0 1000
(4.5)
Notice that as stated by equation (3.29) and can be referred to equation (4.2)
for its value.
For the development of control law parameters, using equation (3.10), the
bounds of , , , , and , , can be computed:
, Δ 0.4282;
, , Δ 1; (4.6)
, , Δ 7.0477
In order to find the scalar valued function that bounds the matched uncertainties
(3.12), the norm values of the states and the input are required. To avoid calculating

111
the value online which will be computationally intensive, the norm of the maximum
values of state and input vectors are used, and , respectively, and given as:
0.55 10 0.55 10 0.55 10 0.55 10 1.87 1.87 1.87 1.87
(4.7)
1.0 1.0 1.0 1.0 (4.8)
Thus, the calculated norm value is:
3.740 (4.9)
2.0 (4.10)
From (4.6), (4.9) and (4.10), the controller parameter can be computed to be as
follows:
, , ,
Δ Δ
10.649 (4.11)
The maximum values for states correspond to the allowable gap
of the actual physical AMB system that will avoid the contact between the rotor and
the stator. The maximum values for the remaining states , are
obtained from (Mohamed and Emad, 1993).
With all the necessary values for the MO-SMC design have been obtained,
the LMI sets to obtain the sliding surface parameters, S, can readily be established.
By defining other design parameters, , , , and the optimized surface
values, , can be computed. Next, by defining controller parameters , , and and
for chattering reduction, the controller design is complete and can readily be applied
to the AMB dynamic model. Figure 4.2 shows the flow chart on the necessary
preparation and set-up for the simulation work.

112
Figure 4.2 Flow charts of simulation preparations and set-up
4.3 Simulation Results of the Multi-objective Sliding Mode Control
To demonstrate the performance of the MO-SMC, the effect of the variations
of the parameters of both the sliding surface and control law will be investigated. The
proposed control law described by equation (3.84) will be applied to control the
AMB dynamic of equations (2.80) with the simulation set-up provided in section 4.2.
The initial rotor position and speed during the start-up of the system is set at:
CALCULATE surface parameters, • Perform system coordinate change • Enter design parameter, • Enter design parameters, , • Enter design parameters, , and • Solve LMI optimization sets
CALCULATE control law parameter, • Compute norm values of uncertainties • Compute norm values of states and input
SET simulation configuration parameters • Solver Type: Fixed-step • Solver: ode 5 (Dormand
-Prince) • Step-size: 1.0e-5
ENTER controller parameters
• , , and
SIMULATE controller on AMB model

113
4.5 10 4.5 10 3.0 10 3.0 10 0 0 0 0
(4.12)
Also, to begin the simulation work the controller parameters that suppress the
chattering effect are set to be as follows:
0.01
0.0005 (4.13)
The study on the variation of these values on the effectiveness of eliminating the
input chattering will be performed in Section 4.6.
For this AMB system, the critical speed of the rotor, , will occur between
4500 rpm < < 6000 rpm in which at this speed, the rotor experiences the most
severe whirling effect (Mohamed and Emad, 1993). Thus it is crucial for the system
to step through this speed safely and stably. In order to demonstrate the effectiveness
of the controller in controlling the AMB system in a wide range of rotor rotational
speed, the simulations will be carried out at four different rotor speeds as follows:
1000 rpm (low speed),
4800 rpm (passing critical speed),
10000 rpm (medium speed),
18000 rpm (maximum speed) (4.14)
4.3.1 Multi-objective Sliding Surface
For the surface design that fulfills the Objective 1 i) outlined in Chapter 3, the
parameters and should be selected such that the cost function (3.22) is
minimized, in which the selection of the values is the trade-off between the desired
control performance ( large) and the low input energy ( large). For the

114
Objective 1 ii), the parameters and define the vertical strips the bound the
minimum and maximum allowable region of the real components of the system’s
eigenvalues and is chosen to meet the desired damping of the system. Varying any
combination of the parameter values will affect the convergence of the LMI solution
and more importantly it will influence the performance of the AMB system. The
investigation of the variation on each specific surface design parameters on the
system performance is carried out in the following sections.
4.3.1.1 Effect of and Design Matrices
In this section, the effect of parameters and is demonstrated. To
perform the simulation, the parameters c1, c2 and are fixed at:
c1 = 3500, (left-most real component eigenvalue at -3500)
c2 = 50, (right-most real component eigenvalue at -50)
= 40º, (conic sector).
For this AMB system with , 4 and , the dimension of is
and is . The matrices of these parameters are defined in
the following form:
,
(4.15)
With this matrix structure, it is clear that all the individual states and inputs will be
penalized equivalently by parameter and , respectively. Specifically for the AMB
system, the system is symmetric and all the gaps between the rotor and the stator
should be in equivalent magnitude. Correspondingly, all the input currents will be in
similar range of magnitude. Notice that with the selected , only the states
correspond to the gap displacement will be penalized.

115
Three sets of parameters and are considered for the simulation work
and the first parameter set with its corresponding computed optimized H2 norm,
sliding surface parameters, , and the closed-loop eigenvalues , is as follows:
Set 1:
15 ,
0.5
Calculated cost: 4.4335 10
Calculated surface parameters, : , where
13.7593 0.0433 0 0
0.0433 13.7593 0 00 0 13.7593 0.04330 0 0.0433 13.7593
,
0.0039 1.2364 10 0 0
1.2364 10 0.0039 0 00 0 0.0039 1.2364 100 0 1.2364 10 0.0039
Computed closed-loop eigenvalues :
10 3.5 3.5 3.5 1.39 10 5 3.5 1.39 10 5
Figure 4.3 - 4.6 show the response of the gap displacement , , and ,
respectively, for the four set rotor speeds. Figure 4.7 and 4.8 illustrate the rotor orbit
on both the left and right bearing. From these figures, it is proven that the system
achieves desired performance in which the rotor is stabilized with negligible airgap
vibration. The control input for each pair of magnetic coils is shown by Figures 4.9 –
4.12. Apart from the start-up time of the system, it can be noticed that all the input
currents are continuous and below the saturated level (±1A). These control inputs are
also able to bring the system to the sliding surface to achieve the system response as
defined by the surface characteristic and insensitive against system uncertainties, as
demonstrated by Figures 4.13 – 4.16.

116
Figure 4.3 Trajectories of X1 for parameter Set 1
Figure 4.4 Trajectories of X2 for parameter Set 1

117
Figure 4.5 Trajectories of X3 for parameter Set 1
Figure 4.6 Trajectories of X4 for parameter Set 1

118
Figure 4.7 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 1
Figure 4.8 Rotor orbit for X2 vs. X4 (right bearing) for parameter Set 1

119
Figure 4.9 Control input for parameter Set 1
Figure 4.10 Control input for parameter Set 1

120
Figure 4.11 Control input for parameter Set 1
Figure 4.12 Control input for parameter Set 1

121
Figure 4.13 Sliding surface σ1 for parameter Set 1
Figure 4.14 Sliding surface σ2 for parameter Set 1

122
Figure 4.15 Sliding surface σ3 for parameter Set 1
Figure 4.16 Sliding surface σ4 for parameter Set 1

123
To illustrate the effect of varying the optimal parameters, for the second set
of parameter and , it is chosen such that both are equal in magnitude which
indicates both the control performance and input energy are equally penalized. The
set of parameters with the calculated optimized H2 norm, sliding surface parameters,
S, and the closed-loop eigenvalues , are as follows:
Set 2:
15 ,
15
Calculated cost: 1.0158 10
Calculated surface parameters, : , where
3.8642 0.0029 0 00.0029 3.8642 0 0
0 0 3.8642 0.00290 0 0.0029 3.8642
,
0.0039 1.2364 10 0 0
1.2364 10 0.0039 0 00 0 0.0039 1.2364 100 0 1.2364 10 0.0039
Computed closed-loop eigenvalues :
10 9.792 2.10 10 9.792 2.10 10 9.87 9.87
From Figures 4.17 – 4.22, one can notice although the H2 norm obtained is
larger, the response of the system is almost comparable with the resulted obtained by
using Set 1 where the gap deviations are negligibly small. This shows that the design
freedom for the selection of parameters and is rather flexible, provided that
the LMI sets is feasible. Figures 4.23 - 4.26 and Figures 4.27 – 4.30 show the
control currents and the respective sliding surfaces. At rotor speed 18000rpm, a small
oscillation of the surface σ4 can be observed which portrays the variation due to the
changes on parameter chosen.

124
Figure 4.17 Trajectories of X1 for parameter Set 2
Figure 4.18 Trajectories of X2 for parameter Set 2

125
Figure 4.19 Trajectories of X3 for parameter Set 2
Figure 4.20 Trajectories of X4 for parameter Set 2

126
Figure 4.21 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 2
Figure 4.22 Rotor orbit for X2 vs. X4 (left bearing) for parameter Set 2

127
Figure 4.23 Control input for parameter Set 2
Figure 4.24 Control input for parameter Set 2

128
Figure 4.25 Control input for parameter Set 2
Figure 4.26 Control input for parameter Set 2

129
Figure 4.27 Sliding surface σ1 for parameter Set 2
Figure 4.28 Sliding surface σ2 for parameter Set 2

130
Figure 4.29 Sliding surface σ3 for parameter Set 2
Figure 4.30 Sliding surface σ4 for parameter Set 2

131
For the third set of the and , it is chosen such that the control effort is
penalized more than the system response (high and low ) and is chosen as
follows:
Set 3:
5 ,
15
Calculated cost: 6.1658 10
Calculated surface parameters, : , where
1.2782 0.0002 0 00.0002 1.2782 0 0
0 0 1.2782 0.00020 0 0.0002 1.2782
,
0.0039 1.2364 10 0 0
1.2364 10 0.0039 0 00 0 0.0039 1.2364 100 0 1.2364 10 0.0039
Computed closed-loop eigenvalues :
10 3.241 4.795 10 3.241 4.795 10 3.262 3.262
The result of the simulations using this parameter set is shown by Figures
4.31 – 4.34, Figure 4.35 – 4.36, Figures 4.37 – 4.40 and Figures 4.41 – 4.44 for the
gap deviations, rotor orbits, control currents and sliding surfaces, respectively. It can
be seen that the regulation of the gap deviations is satisfactory except at rotor speed
18000rpm, a minor oscillation of the gaps exist before settling to zero. Also,
although the control inputs are able to bring the system’s states to the sliding surface,
at rotor speed 18000 rpm and 18000 rpm, the four surfaces oscilate quite
noticeably especially at 18000 rpm. This however does not affect the system
performance significantly but the desired characteristic of the system can only be
retained once the system in sliding mode.

132
Figure 4.31 Trajectories of X1 for parameter Set 3
Figure 4.32 Trajectories of X2 for parameter Set 3

133
Figure 4.33 Trajectories of X3 for parameter Set 3
Figure 4.34 Trajectories of X4 for parameter Set 3

134
Figure 4.35 Rotor orbit for X1 vs. X3 (left bearing) for parameter Set 3
Figure 4.36 Rotor orbit for X2 vs. X4 (left bearing) for parameter Set 3

135
Figure 4.37 Control input for parameter Set 3
Figure 4.38 Control input for parameter Set 3

136
Figure 4.39 Control input for parameter Set 3
Figure 4.40 Control input for parameter Set 3

137
Figure 4.41 Sliding surface σ1 for parameter Set 3
Figure 4.42 Sliding surface σ2 for parameter Set 3

138
Figure 4.43 Sliding surface σ3 for parameter Set 3
Figure 4.44 Sliding surface σ4 for parameter Set 3

139
4.3.1.2 Effect of Design Parameter,
In order to observe the effect of varying parameter, , the parameter Set 1
with 15 and 0.5 is used. Based on the results presented in
previous section, since the AMB system is a symmetric system, the results of the X1
trajectory and the control current are sufficient to illustrate the effect of the
variation of controller’s parameters. Rotor speed, p = 18000 rpm, is set to illustrate
the performance of the system at the uppermost bound of uncertainties and
disturbance. From the design procedure outlined in Chapter 3, and thus
variation in the value of matrix can be achieved by varying a single scalar value, .
In addition to the value 1000 used in Section 4.3.1.1, three other values are
considered. Table 4.1 tabulates the values and its respective calculated H2 norm
where it can be noticed that the norm value is proportional to the magnitude of value
.
Table 4.1 Various values and the calculated H2 norm.
Calculated
-10 2101.9020 ×
-1000 2104.4335×
-5000 3102.1421×
-10000 3104.2776 ×
Figure 4.45 and 4.46 shows the trajectories of X1 and input current , respectively,
for the selected values. The simulations show that the gap deviation, X1 reaches
zero for all selected s, however, for 10, the X1 has a relatively longer settling
time.
It has been discussed that varying will affect the hitting time of the sliding
surface, as demonstrated in Figures 4.47 and 4.48, where as the magnitude of is
increased, the hitting time is reduced and this verifies Lemma 1 in Chapter 3. (Note
that used for the title in Figures 4.45 – 4.48).

140
Figure 4.46 Control input (Varying )
Figure 4.45 Trajectories of X1 (Varying )

141
Figure 4.47 Sliding surface σ1 (Varying )
Figure 4.48 Zoomed view of sliding surface σ1

142
4.3.1.3 Effect of Design Parameter, , and
For this particular AMB model, parameters and do not significantly
affect the optimized sliding surface since most eigenvalues reside toward the leftmost
boundary defined by c1. Thus, only is varied and the resulted performance is
shown for the selected values of c1 listed in Table 4.2. The values for c2, and are
fixed at 50, 40º and -1000, respectively. As can be seen from Table 4.2 that the
calculated H2 norm decreases as c1 is increased which reflects that as the LMI region
is widened, it offers the LMI solver more flexibility to search for a more optimum a
solution for the given constraints.
Figure 4.49, 4.50 and 4.51 show the results of X1, and σ1, respectively,
when c1 is varied. It can be observed that only the value c1 = 100, produces unstable
system response and the input reaches its saturation level in most of simulation time.
Also, due to this saturated input, the sliding mode does not exist as shown in Figure
4.51. For other c1 values, the only difference that can be observed is as c1 increases,
the settling time is shortened and the system responses comparably the same.
Table 4.2 Various c1 values and the calculated H2 norm.
c1 Calculated
100 3102.1896 ×
1000 2107.0537 ×
3500 2104.4335×
5000 2104.2451×

143
Figure 4.49 Trajectories of X1 (Varying c1)
Figure 4.50 Control input (Varying c1)

144
Figure 4.51 Sliding surface σ1 (Varying c1)
4.3.2 Surface Parameterization with Optimal Quadratic Performance
In the previous sections, the surface parameters are calculated by solving the
LMI sets with two constraints namely the optimal performance and the robust pole-
placement in LMI region. Thus, when one of the constraints is relaxed, the solution
produced will fulfill the remaining desired system performance. The purpose of this
section and Section 4.3.3 that follows is to investigate the response characteristic of
the system when one of the constraints is removed.
In this section, the system response when the optimal quadratic performance
is set as the only LMI constraint is studied. Table 4.3 shows two sets of parameters
and with the calculated H2 norm and resulted closed-loop eigenvalues.
Comparing these calculated values with the result in Table 4.1, for parameter set
Case 1, a noticeable higher real component of the eigenvalues and the H2 norm are
obtained. This shows that the relaxed pole-placement constraint imposes the
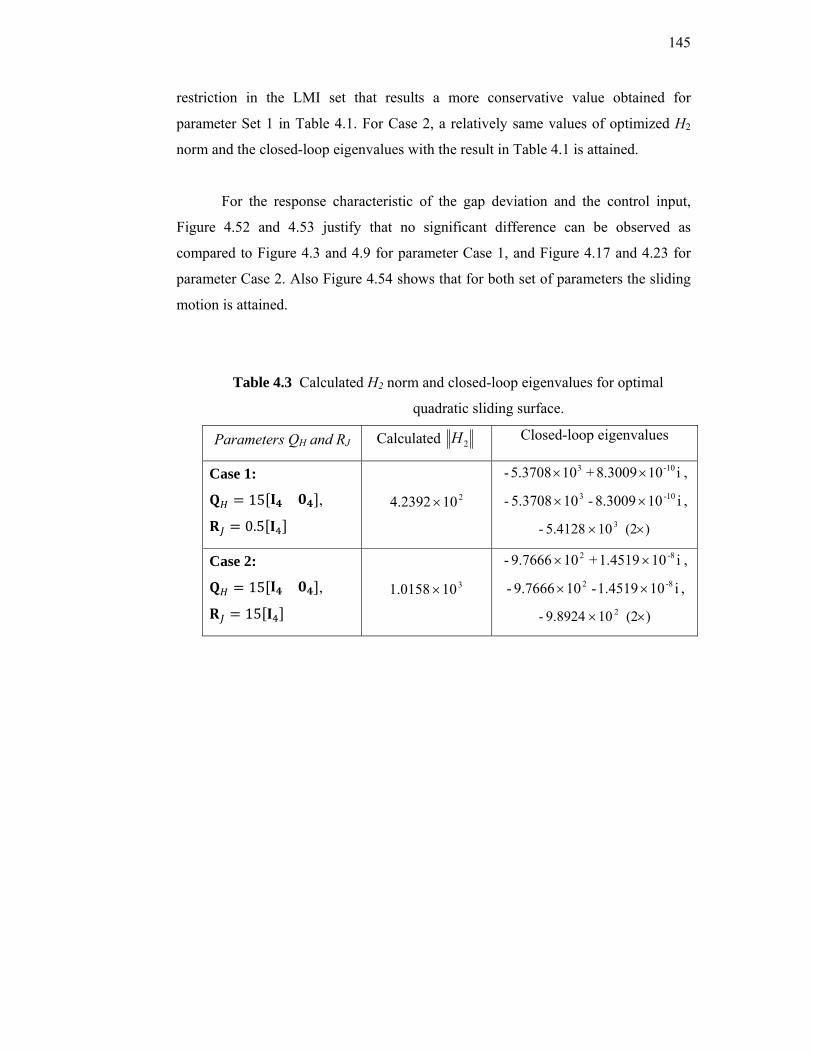
145
restriction in the LMI set that results a more conservative value obtained for
parameter Set 1 in Table 4.1. For Case 2, a relatively same values of optimized H2
norm and the closed-loop eigenvalues with the result in Table 4.1 is attained.
For the response characteristic of the gap deviation and the control input,
Figure 4.52 and 4.53 justify that no significant difference can be observed as
compared to Figure 4.3 and 4.9 for parameter Case 1, and Figure 4.17 and 4.23 for
parameter Case 2. Also Figure 4.54 shows that for both set of parameters the sliding
motion is attained.
Table 4.3 Calculated H2 norm and closed-loop eigenvalues for optimal
quadratic sliding surface.
Parameters QH and RJ Calculated 2H Closed-loop eigenvalues
Case 1:
15 ,
0.5
2104.2392 ×
i108.3009+ 105.3708- -103 ×× ,
i108.3009- 105.3708- -103 ×× ,
)(2 105.4128- 3 ××
Case 2:
15 ,
15
3101.0158 ×
i101.4519+ 109.7666- -82 ×× ,
i101.4519- 109.7666- -82 ×× ,
)(2 109.8924- 2 ××

146
Figure 4.52 Trajectories of X1 with optimal sliding surface
Figure 4.53 Control input with optimal sliding surface

147
Figure 4.54 Sliding surface σ1 with optimal sliding surface
4.3.3 Surface Parameterization with Robust Constraint of Pole-placement in
LMI Region
In this section the robust pole-placement in LMI region is imposed as the
only constraint in the LMI sets to calculate the sliding surface parameters. Table 4.4
tabulates the values of the c1 with the associated calculated closed-loop eigenvalues.
As can be noticed, the real value of eigenvalues is significantly smaller that the result
obtained by Set 1 and Table 4.3.
Figure 4.55 shows that for both c1 values, the gap deviation oscillates in
small magnitude and for c1 = 1000, the response has a longer settling time. The
reason is when c1 = 1000 is chosen, LMI region is set smaller and the resulted
eigenvalues are ‘pushed’ towards less negative real values that produces a longer
settling time. In term of control input, for c1 = 1000, the input current hits the
saturation level when the system is starting up as shown in Figure 4.56. Also with

148
this low value of c1, as illustrated by Figure 4.57, the sliding surface is reached at a
relatively longer time due to the saturated input.
Table 4.4 Closed-looped eigenvalues for sliding surface with robust pole-
placement constraint
Parameters c1 Closed-loop Eigenvalues
1000 346.7805- , 348.2496- ,
347.9276- , 347.4361- .
3500 101.1878- 3× , 101.1694- 3× ,
101.1805- 3× , 101.1758- 3× .
Figure 4.55 Trajectories of X1 with LMI constraint pole-placement sliding surface

149
Figure 4.56 Control input with LMI constraint pole-placement sliding surface
Figure 4.57 Sliding surface σ1 with LMI constraint pole-placement sliding surface

150
4.4 The Effect of Design Parameter, , on System Performance
To study the effect on the system performance when the parameter that
bounds the uncertainties is varied, the parameter setting Set 1 of MO-SMC used in
Section 4.3.1.1 is retained. For the following simulations, in addition to the value
10.7, two additional values are used as follows:
i. 2, (Not satisfying equation (3.12))
ii. )(tη = 50 (Conservatively satisfying equation (3.12))
The parameter 2 is chosen to represent the case where the condition imposed
by equation (3.12) is not satisfied which implies the nonlinear controller gain is too
small to remove the effect of uncertainties and disturbance that present in the system.
For 50, the value does satisfying the equation (3.12), however, the value is
set too large to bound the uncertainties. This means that the gain of the nonlinear
controller term is conservatively large which entails a lot of control effort is used to
overcome the uncertainties and disturbance. (Note: for the simulation result the
Greek symbol ρ is used to represent ).
Figure 4.58 shows that for 2 , the gap deviation has a longer settling
time and oscillates when reaching steady state. This agrees with the theoretical result
where the gain set is not adequate to eliminate the effect of the uncertainties and
disturbance. When 50 there is an overshoot in the response before reaching
zero steady state value. For the control input, when the system reach steady-state, the
input current for all the values are relatively the same, except for 50, the
input current reaches the saturation level at the system start-up (Figure 4.59). Figure
4.60 illustrate that for value of that is not satisfying the equation (3.12), the
system does not attain the sliding mode, but oscillates in the vicinity of sliding
surface.

151
Figure 4.59 Control input (Varying )
Figure 4.58 Trajectories of X1 (Varying )

152
Figure 4.60 Sliding surface σ1 (Varying )
4.5 The Effect of Design Parameters, and , on Chattering Elimination
The purpose of the following simulation is to investigate the effect of varying
the parameters and in eliminating the chattering in the control input. The
parameter determines the thickness of the boundary layer of the sliding surface
plays the major role in suppressing the chattering and the parameter only sets the
decay rate of the surface. However, since the parameter г determines the
convergence of the boundary layer, it has a very inconsiderable effect in eliminating
the input chatter and thus, 0.001 (constant) is used for this simulation. To
quantify the effect of chattering the so-called total power consumed index, Te shown
by equation (3.85) is used gauge chattering effect present in the control input since
high chattering effect implies large power consumption. Table 4.5 shows the chosen
values and the corresponding Te.

153
Table 4.5 and the power consumption index, Te.
0.5 0.5344
0.0005 0.5288
0.00001 0.7694
The tabulated Te values show that as the thickness of the boundary layer is
decreased, the Te value increases. This agree with the theoretical result in which the
thinner the boundary layer is, the higher the chattering effect in the input that results
in higher energy being consumed by the system. Figures 4.61 – 4.63 illustrate the
state X1, input current and sliding surface σ1, respectively. For 0.5, X1
oscillates within the boundary layer at steady state and the system never attains the
sliding mode but continuous input current is acquired. For thin boundary layer =
0.00001, X1 is regulated very effectively and the system enter the sliding motion at
the cost of high chattering effect which results in large power consumption. From
this simulation, = 0.0005 is the ‘optimum’ value for the trade-off between these
conflicting requirement.
Figure 4.61 Trajectories of X1 (Varying )

154
Figure 4.62 Control input (Varying )
Figure 4.63 Sliding surface σ1 (Varying )

155
4.6 The Effect of Bias Current, Ib, on System Performance
It is known that high bias current, Ib, in AMB system will improve the
damping of the system due to higher magnetic stiffness. In contrary, the main
disadvantage of this high current is additional power consumption is utilized. In this
section, the study on the performance of the system under variation of bias current is
carried out.
Table 4.6 shows the Te index for various bias current set for the simulation.
One can notice that as the bias current increases, so does the Te index which reflects
the increases in power consumption. However, for Ib = 0.8 A, it produces a higher Te
index due to the fact that, the system is difficult to be stabilized with this low bias
current. Figure 4.64 shows this effect where the gap deviation, X1, oscillates with
considerably large amplitude at steady-state. Figure 4.65 further illustrates that with
this Ib = 0.8, the rotor experience a whirling effect. Also, for operation under bias
current Ib = 0.8 and Ib = 0.9, the maximum gap deviation allowed by the actual
physical system is -4105.5 × m is violated and will cause the rotor to rub the stator.
For high bias current Ib = 1.8, the good damped system response is achieved at the
cost of high power consumption.
Table 4.6 Bias current, Ib and power consumption index, Te.
Ib [A]
0.8 0.5058
0.9 0.4766
1.0 0.5288
1.8 1.349

156
Figure 4.64 Trajectories of X1 (Varying Ib)
Figure 4.65 Rotor orbit for X1 vs. X3 (Varying Ib)

157
4.7 Comparison between Multi-objectives Sliding Mode Controller with
Ideal Sliding Mode Controller and Continuous Sliding Mode Controller
The purpose of this simulation is to compare the performance of the newly
proposed MO-SMC with Ideal Sliding Mode Control (I-SMC) and Continuous
Sliding Mode Control (C-SMC) designed in (Lee et al. 2003).
The I-SMC is in the structure of equation (3.7) and is given as
(4.16)
where the discontinuous controller gain, is the sliding surface
matrix and is the switching function defined in (Utkin, 1977; Edward and
Spurgeon, 1998). For the C-SMC, the controller is in the form of
(4.17)
where and is defined as the boundary layer thickness. Notice that the
controller C-SMC is continuous and expected to be free from chattering effect.
In this simulation, the parameter for MO-SMC set in previous section is
retained. For I-SMC, the value 10.7 is used to ensure that the
controller gain is sufficient to remove the uncertainties. Then, for the C-SMC,
0.01 is used. In designing the sliding surface for both controllers, the pole
placement method is used. Two set of poles that are used for the simulation are:
220 250 550 630 ,
3500 3510 5320 3530 .
The poles for set 2 are selected such that the poles reside in the range of the poles
obtained from the MO-SMC design. Obviously, for I-SMC and C-SMC, the surface

158
parameters, S, obtained from the procedure outlined in Section 3.3 cannot be adapted
due to the different structure of the equivalent control term. However, with the
selection of , the resulted sliding surfaces will closely reflect the region of
the closed-loop poles obtained from the MO-SMC.
Figure 4.66 shows the response of the system for the three types of
controllers. The poles set 1 are used for I-SMC and C-SMC in the simulation. In this
context, it can be seen that MO-SMC performs significantly better that I-SMC and
C-SMC where the settling time is shorter and less oscillation occur at steady state.
When the poles set 2 are used, the response of the system is shown in Figures 4.67-
4.70. The result shows that the response for all the controllers are relatively the same
except for I-SMC and C-SMC, a considerable overshoot occurs before the gap
deviation reach zero steady-state value. However, when looking at the control input
shown in Figures 4.71-4.74, it is obvious that the I-SMC contains undesirably high
chattering effect. Also, for C-SMC, although it is a continuous type controller, it can
be seen that input reaches its saturation level during most of the simulation time. This
is due to the fact that the C-SMC has to consume more power and hit the allowable
current limit to meet the desired system response. For MO-SMC, the continuous
input signal is achieved to obtain the desired response and less power consumption is
required as shown in Table 4.7. Figures 4.75-4.78 show that the under I-SMC, the
sliding surface contains high chattering effect and oscillates in the vicinity of sliding
surface. Analogously, the similar sliding surface for C-SMC also can be observed
due to the saturation of the control input. The figure justifies that the sliding surface
under MO-SMC has almost no oscillations and the sliding mode is attained.
Table 4.7 Maximum power consumption of AMB for MO-SMC,
I- SMC and C-SMC with the associated controller gains.
Controllers
I-SMC 0.7147
C-SMC 0.80
MO-SMC 0.5288

159
Figure 4.66 Trajectories of X1 of I-SMC, C-SMC and MO-SMC ( )
Figure 4.67 Trajectories of X1 of I-SMC, C-SMC and MO-SMC ( )

160
Figure 4.68 Trajectories of X2 of I-SMC, C-SMC and MO-SMC ( )
Figure 4.69 Trajectories of X3 of I-SMC, C-SMC and MO-SMC ( )

161
Figure 4.70 Trajectories of X4 of I-SMC, C-SMC and MO-SMC ( )
Figure 4.71 Control input of I-SMC, C-SMC and MO-SMC

162
Figure 4.72 Control input of I-SMC, C-SMC and MO-SMC
Figure 4.73 Control input of I-SMC, C-SMC and MO-SMC

163
Figure 4.74 Control input of I-SMC, C-SMC and MO-SMC
Figure 4.75 Sliding surface σ1 of I-SMC, C-SMC and MO-SMC

164
Figure 4.76 Sliding surface σ2 of I-SMC, C-SMC and MO-SMC
Figure 4.77 Sliding surface σ3 of I-SMC, C-SMC and MO-SMC

165
Figure 4.78 Sliding surface σ4 of I-SMC, C-SMC and MO-SMC
4.8 Summary
The simulation work on the application of the newly proposed MO-SMC on
the AMB system under various conditions has been thoroughly studied in this
chapter. The performance of the controllers under various combinations of controller
parameters has been demonstrated which proves that the MO-SMC is invariant to the
uncertainties and disturbance that present in the system. Besides, the simulations
results also show the flexibility in the controller design where there are many
combinations and selections of controller parameters can be formed to achieve
satisfactory system response in eliminating uncertainties at low power consumption.
It is also shown that the controller has able to give excellent system
performance at a wide range of rotor rotational speed and various bias current which
specifically a new contribution in the area of control of AMB system. The
comparison between the MO-SMC, I-SMC and C-SMC demonstrates that the MO-
SMC has achieved better capability in giving desired good system response as to

166
compare to its counterparts. In addition, the design of MO-SMC is more well-
structured in which the controller parameters can be systematically determined
through solving the multi-constraint LMI set as opposed to the pole-placement
method where the selection of the poles heuristically to produce desirable response
may be time consuming. Concisely, the proposed MO-SMC with multi-objective
surface criteria achieves the design objective in controlling the AMB system to meet
the desired system performance and eliminating the effect of uncertainties and
disturbance present in the system under the continuous low-power control input.

197
CHAPTER 5
CONCLUSION AND SUGGESTIONS 5.1 Conclusion
This thesis is concerned with the design of a new nonlinear robust control
technique and its application into AMB system. The procedure mainly involves two
parts which are: 1) the modeling of the nonlinear AMB system and restructuring it
into a class of uncertain system that serve the basis for controller design, 2) the
development of the robust controller based on SMC theory in which the algorithm
include the design of the sliding surface and the continuous control law.
The formulation of the mathematical dynamic model that represents the AMB
system is outlined in which the major AMB nonlinearity effects which are the speed
dependant gyroscopic effect, nonlinear electromagnetic force and imbalance are
included in the model. Treating the coil currents as the system inputs, the rotor
dynamics are integrated with the electromagnetic dynamics to form the complete
nonlinear AMB model representing the more realistic AMB system. Since the
allowable operational range of the airgap, the rate of change of the airgap, the rotor
rotational speed and the maximum coil input currents are known, the upper and
lower bounds of the system nonlinearities and uncertainties is obtained and the
system can be rearranged to form a class of uncertain system by using deterministic
approach.
In order to perform the control on the AMB system, the sliding mode control
theory is adapted in which a new sliding surface design and a continuous control law,

168
or namely called MO-SMC are proposed. The new sliding surface has the advantages
of fulfilling multiple performance requirement of the closed-loop system in the
sliding motion. Each desired system performance that is essentially represented in
convex LMI set is then formulated to form complete LMI sets and the solution is
obtained by solving the sets using available LMI numerical solver. Specifically in
this work, the sliding surface desired characteristic is formed by formulating LQ
optimal surface and robust pole-clustering residing in a convex LMI region. For the
optimal characteristic, the design parameters are selected such that the H2 norm
objective function is minimized and desired system response is achieved while for
the robust pole clustering, an LMI region that ensures the poles reside in the LMI
area where the bounds form as the design parameters. The surface design is
developed in such a way that the algorithm can be easily amended to accommodate
other desired closed-loop performance such as minimization of mismatched
uncertainty effect in which the solution can be obtained systematically, as opposed to
heuristically selecting the surface parameters.
In the control law development, a new continuous robust SMC controller is
proposed. The controller combines the equivalent control and the exponentially
decaying boundary layer techniques in which by using the reaching condition, the
system states are guaranteed to reach the sliding surface in finite time, even with the
present of the system uncertainties and nonlinearities.
With the complete surface parameterization and the continuous control law
being applied on the nonlinear AMB dynamic model, the effectiveness of the control
performance has been demonstrated through extensive simulations. The robust
performances of the system under wide range of system conditions have been
achieved and this agrees with the theoretical finding. Many combinations of the
surface and control law parameters are also used to access the performance in which
the result shows that the developed algorithm does provide design flexibility.
In order to show the superiority of the newly proposed MO-SMC controller,
benchmarking with I-SMC and C-SMC shows that MO-SMC does provide superior
performance due to its chattering elimination feature and optimized stable closed-
loop performance.

169
Thus, the major contributions of this research can be concluded to be as
follows:
I. A new representation of the AMB system as a class of a nonlinear system
has been formulated and by using deterministic method, the model is
transformed into an uncertain system for controller design.
II. The design of a new sliding surface that can accommodate many
performance objectives in convex formulation. The solution can be
systematically obtained by using LMI technique which produces the
desired sliding surface parameter.
III. The design of a new continuous SMC control law that is able to eliminate
or attenuate the chattering while the reaching condition is guaranteed. The
complete control algorithm of the surface and control law form a new
complete SMC controller that is parameterized systematically and able to
provide robust performance with the present of system nonlinearities and
uncertainties.
IV. Validation of this new robust controller on nonlinear AMB system by
extensive computer simulation in which the evaluation of the performance
is accessed with various combinations of design parameters.
5.2 Recommendation of Future Works
Based on this work, the direction of the future research can be taken in two
ways concurrently which are developing a mathematical AMB model that also
include the second order nonlinearity effect and also the formulation of control law
that can ensure robust performance is achieved. The formulation of the complete
model that is close to the realistic AMB system model will provide the platform for
rigorous study of the dynamic of the system while development of robust controller
on such a model guarantees the satisfactory system response can be achieved under
actual physical condition and thus more directly applicable to real system.
Specifically to the scope of this work, the following suggestions for future works are
recommended:

170
i) Besides the inclusion of the second nonlinearity effects in the dynamic
model, AMB system with moving base is considered in the modeling
such that the model can cater broader range of application,
ii) The use and integration of adaptive technique with the MO-SMC to adjust
the bias current such that the optimal value can be achieved to minimize
steady state power loss,
iii) Application of the MO-SMC controller on the real AMB system such that
the actual performance can be verified experimentally, and
iv) With the availability of experimental set-up, identification method can be
proposed to obtain the uncertain bound which produces less conservative
controller gain.

171
LIST OF PUBLICATIONS
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2008). Application of H2 –
Based Sliding Mode Control of Active Magnetic Bearing System.
International Journal of Mechanical System Science and Engineering. 2(1):
pp. 1-8.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2008). Asymptotic Stabilization
of Active Magnetic Bearing System using LMI-based Sliding Mode Control
of. International Journal of Mechanical System Science and Engineering.
2(1): pp. 9-16.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2008). Chattering-free Sliding
Mode Control for an Active Magnetic Bearing System. International Journal
of Mechanical System Science and Engineering. 2(1): pp. 48-53.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2007). Deterministic Models of
Active Magnetic Bearing System. International Journal of Computers. 2(8):
pp. 9-17.
Ahmad, M. N., Husain, A. R. and Mohd. Yatim, A. H. (2008). Sliding Mode Control
in Malaysia: A Brief Review on its Research Scope and Trend. in
Proceedings of 2008 Student Conference on Research and Development
(SCOReD 08), November. Johore Bahru, Malaysia.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2007). Sliding Mode Control
with Linear Quadratic Hyperplane Design: An Application to Active
Magnetic Bearing System. in proceedings of 5th Student Conference on
Research Development (SCOReD 07), Dec. 11-12, Bangi, Selangor.

172
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2007). A New LMI-Based
Sliding Mode Control of An Active Magnetic Bearing System. International
Conference on Robotics, Vision, Info. & SignalProcessing. (ROVISP 07),
Nov. 28-30, Penang.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2007). Sliding Mode Control of
An Active Magnetic Bearing System. National Intelligent System and
Information Technology Symposium (ISITS 07), Oct. 30-31, UPM, Serdang.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2007). Sliding Mode Control of
an Active Magnetic Bearing System with Complex Valued Sliding Manifold.
International Conference on Control, Instrumentation & Mechatronics
(CIM’07), May 28-29, 2007, Johore Bahru, Malaysia.
Husain, A.R., Ahmad M.N. and Mohd Yatim A.H. (2007). Modeling of A Horizontal
Active Magnetic Bearing System with Uncertainties in Deterministic Form.
International Conference in Modelling & Simulation (AMS2007), March 27-
30, 2007, Phuket, Thailand.
Husain, A.R., Ahmad, M.N. and Mohd Yatim A.H. (2006). Modeling of A Nonlinear
Conical Active Magnetic Bearing System with Rotor Imbalance and Speed
Emf. International Conference in Man-Machines Systems (ICoMMS), Sept
15-16, Langkawi, Malaysia.
Husain, A.R., Ahmad, M.N. and Mohd Yatim, A.H. (2006). Elimination of
Mismatched Imbalance Vibration of Active Magnetic Bearing System Using
Full Order Sliding Mode Controller. Regional Postgraduate Conference in
Engineering and Science (RPCES), July 26-27, 2006, SPS UTM, Malaysia.

173
REFERENCES
Ahmad, M. N. (2003). Modelling and Control of Direct Drive Robot Manipulators.
PhD. Thesis. Universiti Teknologi Malaysia, Johore, Malaysia.
Ahmad, M. N. and Osman, J. H. S. (2003). Application of proportional-integral
sliding mode tracking controller to robot manipulators. In Proceedings of IEEE
Conference on Control Applications. June 23-25. : 87-92.
Allaire, P. E. , Mikula, A., Banejee, B. B., Lewis, D. W. and Imlach, J. (1989).
Design and test of a magnetic thrust bearing. Journal of Franklin Institute.
326(6): 831-847.
Anderson, B. D. O. and Moore, B. (1990). Optimal Control – Linear Quadratic
Method. Prentice Hall. New Jersey, USA.
Antila, M., Lantto, E. and Arkkio, A. (1998). Determination of Forces and
Linearized Parameters of Radial Active Magnetic Bearings by Finite Element
Technique. IEEE Transactions on Magnetics. May. 34(3): 684-694.
Arzelier, D., Bernussou, J. and Garcia, G. (1993). Pole Assignment of Linear
Uncertain System in a Sector via Lyapunov-Type Approach. IEEE
Transactions on Automatic Control. July. 38(7): 1128-1132.
Bartoszewics, A. and Patton, R. J. (2007). Sliding Mode Control-Editorial.
International Journal of Adaptive Control and Signal Processing. August. 21:
635-637.
Betschon, F and Knospe, C. R. (2001). Reducing Magnetic Bearing Current via Gain
Scheduled Adaptive Control. IEEE/ASME Transactions on Mechatronics.
December. 6(4): 437-443.
Bi, C., Wu, D., Jiang, Q. and Liu Z. (2005). Automatic Learning Control for
Unbalance Compensation in Active Magnetic Bearings. IEEE Transactions on
Magnetics. July. 41(7) : 2270-2280.

174
Bleuler, H. (1992). Survey of magnetic levitation and magnetic bearing types. JSME
International Journal, Series 3: Vibration, Control Engineering, Engineering
for Industry. September. 35(3): 335-342.
Bleuler, H., Vischer, D., Schweitzer, G., Traxler, A. and Zlatnik, D. (1994a).New
concepts for cost-effective magnetic bearing control. Automatica. May. 30(5):
871-876.
Bleuler, H., Gahler, C., Herzog, R., Larsonneur R., Mizuno, T., Siegwart, R. and
Woo, S. J. (1994b). Application of Digital Signal Processors for Industrial
Magnetic Bearings. IEEE Transaction on ControlSystems Technology.
December. 2(4): 280-289.
Bosgra, O. H., Kwakernaak, H. and Meinsma, G. (2007). Design Method for Control
System. Lecture Note for DISC. Holland.
Boyd, S. Ghaoui, L. E., Feron, E., and Balakrishnan, V. (1994). Linear matrix
inequality in systems and control theory. SIAM. Philadelphia, USA.
Buckholtz, K. R. (2002). Approach Angle-Based Switching Function for Sliding
Mode Control Design. In Proceedings of the American Control Conference.
Anchorage AK, USA. May 8-10: 2368-2373.
Buckner, G. D. (2002). Intelligent Bounds on Modeling Uncertainty: Applications to
Sliding Mode Control. IEEE Transactions on System, Man, and Cybernatics. –
Part C: Application and Review. May. 32(2): 113-124.
Cao, W. J., and Xu, J. X. (2004) Nonlinear Integral-Type Sliding Surface for Both
Matched and Unmatched Uncertain Systems. IEEE Transactions on Automatic
Control. 49(8): 1355- 1360.
Charara, A., Miras, J. D., and Caron, B. (1996). Nonlinear Control of a Magnetic
Levitation System Without Premagnetization. IEEE Transaction on Control
System Technology. September. 4(5): 513-523.
Chen, B. (2000). Robust and H-Infinity Control. Springer. London, UK.
Chen, M. S., Hwang, Y. R., and Tomizuka M. (2002). A State-Dependent Boundary
Layer Design for Sliding Mode Control. IEEE Transaction on Automatic
Control. October. 47(10): 1677-1681.
Chen, M. and Knospe, C. R. (2005). Feedback Linearization of Active Magnetic
Bearings: Current-Mode Implementation. IEEE/ASME Transaction on
Mechatronics. December. 10(6): 632-639.

175
Chen, H. M., Renn, J. C. and Su, J. P. (2005a). Sliding Mode Control with Varying
Boundary Layers for an Electro-Hydraulic Position Servo System.
International Journal of Advance Manufacturing System. January. 26: 117-123.
Chen, S. L., Chen, S. H. and Yan, S. T. (2005b). Experimental Validation of a
Current-Controlled Three-pole Magnetic Rotor-Bearing System. IEEE
Transactions on Magnetics. January. 41(1) : 99-112.
Chilali, M., and Gahinet, P. (1996), H∞ Design with Pole Placement Constraint: An
LMI Approach. IEEE Transaction on Automatic Control. March. 41(3): 358-
367.
Chilali, M., Gahinet, P., and Apkarian, P. (1999). Robust Pole Placement in LMI
Regions. IEEE Transaction on Automatic Control. December. 44(12): 2257-
2270.
Choi, C. Y. (2002). Investigation on the Whirling Motion of Full Annular Rotor Rub.
Journal of Sound and Vibration. 258(1): 191-198.
Choi, H. H. (2007). An LMI-Based Switching Surface Design for Integral Sliding
Mode Control of Mismatched Uncertain Systems. IEEE Transaction on
Automatic Control. 52(4): 736-742.
Choi, H. H. (1998). An Explicit Formula of Linear Sliding Surfaces for a Class of
Uncertain Dynamic systems with Mismatched Uncertainties. Automatica.
34(8): 1015-1020.
Choi, H. H. (1997). A New Method for Variable Structure Control System Design: A
Linear Matrix Inequality Approach. Automatica. 33(11): 2089-2092.
Cole, M. O. T., Keogh, P. S., Sahinkaya, M. N., and Burrows, C. R. (2004). Towards
fault-tolerant active control of rotor-magnetic bearing systems. Control
Engineering Practice. 12: 491-501
DeCarlo, R. A., Zak, S. H., and Mathews, P. (1988). Variable Structure Control of
Nonlinear Multivariable Systems: A Tutorial. Proceedings of IEEE. March
1988. 76(3): 212-232.
DeQueiroz, M.S., Dawson, D.M. and Suri, A. (1998). Nonlinear Control of a large-
gap 2-DOF magnetic bearing system based on a coupled force model. IEE
Proceeding on Control Theory and Application. May. 145(3): 269-276.
DeQueiroz, M.S. and Dawson, D.M. (1996a). Nonlinear Control of Active Magnetic
Bearings: A Backstepping Approach. IEEE Transaction on Control System
Technology. September. 4(5): 545-552.

176
DeQueiroz, M.S. and Dawson, D.M. (1996b). A Backstepping-type Controller for a
6-DOF Active Magnetic Bearing System. In Proceedings of IEEE
International Conference on Control Application. December, Kobe, Japan.
3370-3375.
Diong, B. M. and Medanic, J. V. (1997). Simplex-type variable structure controllers
for system with non-matched disturbance and uncertainties. International
Journal of Control. 68(3): 625-656.
Dorf, R. C. and Bishop, R. H. (1995). Modern Control System. Addison Wesley.
Massachusetts, USA.
Dullerud, G. E. and Pagadini, F. G. (2005). A Course in Robust Control Theory: A
Convex Approach. Text in Applied Mathematics. Springer. UK.
Earnshaw, S. (1842). On the nature of the Molecular Forces Which Regulate the
Constitution of the Lumiferous Ether. Transaction of Cambridge Philosophical
Society 7: 97-112.
Edwards, C. (2004) A practical method for the design of sliding mode controllers
using linear matrix inequality. Automatica. 40: 1761-1769
Edwards, C., and Spurgeon, S. (1998). Sliding Mode Control: Theory and
Applications. Taylor and Francis. London, UK.
El-Ghezawi, O. M. F., Zinober, A. S. I. and Billings, S. A. (1983). Analysis and
Design of Variable Structure System using Geometric Approach. International
Journal of Control. 38: 657-671.
Fabien, B. C. (1996). Observer-based feedback linearizing control of an
electromagnetic suspension. ASME Journal of Dynamic Systems, Measurement
and Control. 118(3): 615-619.
Farrera, A. (2005). A variable structure convex programming based control approach
for a class of uncertain linear systems. System and Control Letters. 54: 529-538
Fittro, R. L. and Knospe, C. R. (2002). Rotor Compliance Minimization Via µ-
Control of Active Magnetic Bearings. IEEE Transaction on Control System
Technology. March. 10(2): 238-249.
Font, S., Duc, G. and Carrere, F. (1994). H∞ Control of Magnetic Bearing. In
Proceedings of IEEE Conference on Control Applications. Aug 24-26.
Glasgow, UK. 581-585.

177
Fujita, M., Matsumura, F. and Uchida, K. (1990). Experiment on the H∞ disturbance
attenuation control of a Magnetic Suspension System. In Proceedings of the
IEEE 28th Conference on Decision and Control, Hawaii, USA. 5: 2773-2778.
Fujita, M., Hatake, K. and Matsumura, F. (1993). Loop Shaping Based Robust
Control of a Magnetic Bearing. IEEE Control System Magazine. August. 13(4):
57-65.
Fujita, M., Namerikawa, T., Matsumura, F. and Uchida, K.(1995). μ-Synthesis of an
Electromagnetic Suspension System. IEEE Transaction on Automatic Control.
Marc. 40(3): 530-536.
Fujita, M., Tokumasu, T., Yamada, T., Hirose, T., Tanaka, Y., Kumagai, N. and
Uchida, S. (1998). 3-Dimensional Electromagnetic Analysis and Design of an
Eddy-Current Rail Brake System. IEEE Trans. on Magnetics. September.
34(5): 3548-3551.
Gahinet, P. and Apkarian. P. (1994). A Linear Matrix inequality Approach for H∞
Control. International Journal of Robust and Nonlinear Control. 4(5): 421-
448.
Gahinet, P., Nemirovski, A., Laub, A., and Chilali, M. (1995). LMI control toolbox,
user guide. Natick, MA: Mathworks, Inc.
Gao W. B., and Hung J. C. (1993). Variable structure control of nonlinear systems:
A New approach. IEEE Transactions on Industrial Electronics. February. 1993
40: 45-55.
Gibson, N. S., Choi, H. and Buckner, G. D. (2003). H Control of Active Magnetic
Bearings Using Artificial Neural Network Identification of Uncertainty. 2003.
In IEEE Proceedings of International Conference on System, Man and
Cybernetics. October 5-8. Washington DC. USA. : 1449-1456.
Grochmal, R., and Lynch, A. F. (2007). Experimental comparison of nonlinear
tracking controllers for active magnetic bearings. Control Engineering
Practice. 15: 95-107.
Gutman, S. and Jury, E. I. (1981). A General Theory for Matrix Root-Clustering in
Subregion of the Complex Plane. IEEE Transaction on Automatic Control.
August. AC-26(4): 853-863.
Hartavi, A. E., Tuncay, R. N. and Gurleyen, F. (2001). The Design, Simulation and
Experimental Study of Active Magnetic Bearing . Proc. IEEE, 2001.

178
Hassan I. M. M. (2002). Modern Robust Control of Magnetic Bearing System with
Imbalanced Rotor. Ph. D. Thesis, Assiut University, Egypt.
Hassan, I. M. M. and Mohamed, A. F. (2001). Variable Structure Control of
Magnetic Levitation System. in Proceedings of American Control Conference.
June 25-27. Arlington, Virginia, USA: 3725-3730.
Henrion, D. (2007). Course Note on LMI Optimization with Application in Control.
Czech Technical University in Prague.
Herrmann, G., Turner, M. C. and Postlethwaite, I. (2007). Linear Matrix Inequality
in Control. - Lecture Notes in Control and Information Sciences, Mathematical
Methods for Robust and Nonlinear Control. Book Chapter, Springer. Berlin.
Hermann G., Spurgeon, S. and Edwards, C. (2001). A Robust Sliding Mode Output
Tracking Control for a Class of relative degree zero and non-minimum phase
plants: A Chemical Process Application. International Journal of Control.
74(12): 1194-1209.
Herzog, R., Buhler, P., Gahler, C. and Larsonneur R. (1996). Unbalance
Compensation Using Generalized Notch Filters in the Multivariable Feedback
of Magnetic Bearings. IEEE Transaction on Control System Technology.
September. 4(5): 580-586.
Hong, S. K. and Langari, R. (2000). Robust Fuzzy Control of Magnetic Bearing
System subjected to Harmonic Disturbance. IEEE Transaction on Control
System Technology. March. 8(2): 366-371.
Hong, S. K. and Nam, Y. (2003). Stable Fuzzy Control System Design with Pole-
Placement Constraint: an LMI Approach. Computer in Industry. 51: 1-11.
Hsu, C. T. and Chen, S. L. (2003). Nonlinear control of a 3-pole active magnetic
bearing system. Automatica. 39:291-298.
Hsu, C. T. and Chen, S. L. (2002). Exact Linearization of a Voltage-Controlled 3-
Pole Active Magnetic Bearing System. IEEE Transaction on Control System
Technology. July. 10(4): 618-625.
Hu, T., Lin, Z., and Allaire, P. E. (2004). Reducing Power Loss in Magnetic
Bearings by Optimizing Current Allocation. IEEE Transaction on Magnetics.
40(3): 1625-1635
Huang, J. Y., and Way, H. K. (2001a). Placing all closed poles of missile attitude
control systems in the sliding mode via the root locus technique. ISA
Transactions. 40: 333-340

179
Huang, J. Y., and Way, H. K. (2001b). Design of sliding surfaces in variable
structure control via a direct pole assignment scheme. International Journal of
Systems Science. 40(8): 963-969.
Huang, S. J., and Lin, L. C. (2003). Fuzzy Modelling and Control for Conical
Magnetic Bearings Using Linear Matrix Inequality. Journal of Intelligent and
Robotic Systems. August. 37: 209-232.
Huang, S. J., and Lin, L. C. (2004). Fuzzy Dynamic Output Feedback Control with
Adaptive Rotor Imbalance Compensation for Magnetic Bearing Systems. IEEE
Transaction on System, Man, and Cybernatics. – Part B: Cybernatics. August.
34(4): 1854-1864.
Huang, S. J., and Lin, L. C. (2005). Stable Fuzzy Control with Adaptive Rotor
Imbalance Compensation for Nonlinear Magnetic Bearing Systems. Journal of
the Chinese Institute of Engineers. 28(4): 589-603.
Hung, J. H. (1995). Magnetic Bearing Control Using Fuzzy Logic. IEEE Transaction
on Industry Application. November/December. 31(6): 1492-1497.
Hung, J. H., Gao, W., and Hung, J. C. (1993). Variable Structure Control: A Survey.
IEEE Transaction on Industrial Electronics. February. 1993. 40(1): 2-22.
Hung, J. Y., Albritton, N. G. and Xia, F. (2003). Nonlinear Control of Magnetic
Bearing System. Mechatronics. 13: 621-637.
Iwasaki, T., Skelton. R. E. and Geromel, C. J. (1994). Linear Quadratic Suboptimal
Control with Static Output Feedback. Systems and Control Letters. 23(6): 421-
430.
Jafarov, E. M. (2005). Robust Sliding Mode Controllers Design Techniques for
Stabilization of Multivariable Time-delay System with Parameter Perturbation
and External Disturbances. International Journal of System Science. June.
7(10): 433-444.
Jafarov, E. M., Parlakci, M. N. A and Istefanopolos, Y. (2005). A new Variable
Structure PID-Controller Design for Robot Manipulators. IEEE Transaction on
Control System Technology. Jan. 13(1): 122-130.
Jang M.-J, Chen C.-L. and Tsao Y.-M. (2005). Sliding Mode Control for active
magnetic bearing system with flexible rotor. Journal of Franklin Institute. 342:
401-419.

180
Joo and Seo. (1997). Design and Analysis of the Nonlinear Feedback Linearizing
Control for an Electromagnetic Suspension System. IEEE Transaction on
Control System Technology. Jan. 5(1): 135-144.
Kanebako, H. and Okada, Y. (2003). New Design of Hybrid-Type Self-Bearing
Motor for Small, High-Speed Spindle. IEEE/ASME Transaction on
Mechatronics. March. 8(1): 111-119.
Kasarda, M. E. F. (2000). An Overview of Active Magnetic Bearing System
Technology and Applications. The Shock and Vibration. March. 32(2): 91-99.
Kim, K. J., Park, J. B. and Choi, Y. H. (2006). Chattering Free Sliding Mode
Control. In SICE-ICASE International Joint Conference. Oct. 18-21. Busan,
Korea.
Kim, S. K. and Jabbari, F. (2000). Using Scales in the Multiobjective Approach.
IEEE Transaction on Automatic Control. May. 45(5): 973-977.
Kim, S. K., and Park, Y. (2004) Sliding Mode Design via Quadratic Performance
Optimization with Pole-Clustering Constraint. Siam Journal on Control
Optimization. 43(2): 670-684.
Kim, S. K., Park. Y. and Oh, S. W. (2000). Designing Robust Sliding Hyperplane for
Parametric Uncertain System: A Riccati Approach. Automatica. 36: 1041-
1048.
Knospe C. R. (2007). Active magnetic bearings for machining applications. Control
Engineering Practice. 15: 307-313.
Knospe C. R. and Collins E. G. (1996). Introduction to Special Issue on Magnetic
Bearing Control. IEEE Trans. on Control System Technology. Sept. 1996. 4(5):
481-483.
Laghrouche S., Plestan F., and Glumineau A. (2007). Higher order sliding mode
based on integral sliding mode. Automatica. 43: 531-537.
Lee, C. W. and Jeong, H. S. (1996). Dynamic Modeling and Optimal Control of
Cone Shaped Active Magnetic Bearing Systems. Control Engineering
Practice. 4(10): 1393-1403.
Lee, H., and Utkin, V. (2007). Chattering suppression methods in sliding mode
control systems. Annual Review in Control. 31: 179-188.
Lee J.-H., Allaire P. E., Tao G., Decker J. A. and Zhang X. (2003). Experimental
Study of Sliding Mode Control for a Benchmark Magnetic Bearing System and

181
Artificial Heart Pump Suspension. IEEE Transaction on Control System
Technology. Jan. 11(1): 128-138.
Lewis, A. S., Sinha, A., and Wang, K. W. (2001). Sliding Mode Output Feedback
Control of a Flexible Rotor Supported by Magnetic Bearings. International
Journal of Rotating Machinery. 7(2): 117-129.
Lewis, F. L., Abdallah C. T. and Dawson, D. M. (1993). Control of Robot
Manipulators. New York: Macmillan.
Levine, J., Lottin, J., and Ponsart, J. C. (1996). A Nonlinear Approach to the Control
of Magnetic Bearings. IEEE Transaction on Control System Technology.
September. 4(5): 524-544.
Li, G., Lin, Z., Allaire, P. E. and Luo J. (2006). Modeling of High Speed Rotor Test
Rig with Active Magnetic Bearings. ASME Journal of Vibration and Acoustics.
June. 128: 269-281.
Li, L. (1999). Linearizing magnetic bearing actuators by constant current sum,
constant voltage sum, and constant flux sum. IEEE Transaction on Magnetic.
.35(1): 528-535.
Li, L. and Mao, J. (1999). Feedback linearization of magnetic bearing actuators for a
uniform upper bound of force slew rate. IEE Proceedings of the Electric Power
Applications. 146(4): 378-382.
Liang, T. and Yiqing, C. (2007) Model Development and Adaptive Imbalance
Vibration Control of Magnetic Suspended System. Chinese Journal of
Aeronautics. 20: 434-442.
Liang Y. W., and Xu S. D. and Chu, T. C. (2007). Robust Control of the Robot
Manipulator via an Improved Sliding Mode Scheme. In Proceedings of IEEE
International Conference on Mechatronics and Automation. August 5-8.
Harbin, China: 1593-1598.
Lin, C. H. and Gau, T. B. (1997). Feedback Linearization and Fuzzy Control for
Conical Magnetic Bearings. IEEE Transaction on Control System Technology.
July. 5(4): 417-426.
Lin, C. T. and Jou, C. P. (2000) GA-Based Fuzzy Reinforcement Learning for
Control of Magnetic Bearing System. IEEE Transactions of System, Man and
Cybernatics- Part B: Cybernatics. April. 32(2): 276-289.

182
Lindlau J. D. and Knospe C. R. (2002). Feedback Linearization of an Active
Magnetic Bearing With Voltage Control. IEEE Transaction on Control System
Technology January. 10(1): 21-31.
Liu Z.-H. , Nonami K. and Ariga Y. (2002). Adaptive Unbalanced Vibration Control
of Magnetic Bearing Systems with Rotational Synchronizing and
Asynchronizing Harmonic Disturbance. JSME International Journal. Series C,
45(1): 142-149.
Lofberg, J. (2004). YALMIP : A Toolbox for Modeling and Optimization in
MATLAB. In Proceedings of the CACSD International Conference. Taiwan.
Losch F., Gahler C. and Herzog R. (1999). Low Order μ-Synthesis Controller Design
for a Large Boiler Feed Pump Equipped with Active Magnetic Bearings. In
Proceedings of IEEE International Conference on Control Application. August
22-27, 1999: 564-569
Lu, B., and Wu, F. (2004). Switching LPV control designs using multiple parameter-
dependent Lyapunov functions. Automatica. 40:1973-1980.
Lu, B., Choi, H., Buckner, D. and Tammi, K. (2008). Linear parameter-varying
techniques for control of a magnetic bearing system. Control Engineering
Practice. 16(10): 1161-1172.
Lum K.-Y., Coppola V. T. and Bernstein D. S. (1996). Adaptive Autobalancing
Control for an Active Magnetic Bearing Supporting a Rotor with Unknown
Mass Imbalance. IEEE Trans. on Contr. Syst. Tech. Sept. 1996. 4(5): 587-597.
Maslen, E., Sortore, C. K., Gillies, G. T., Williams, R. D., Fedigan, S. J. and
Aimone, R. J. (1999). Fault Tolerence Magnetic Bearings. ASME Journal of
Engineering for Gas Turbines and Power. 121(3): 504-508.
Mackenroth, U. (2004). Robust Control System: Theory and Case Study. Springer-
Verlag. New York, USA.
Matsumura, F. and Yoshimoto, T. (1986). System modeling and control design of a
horizontal shaft magnetic bearing system. IEEE Transaction on Magnetics.
May. MAG-22(3): 196-203.
Matsumura, F., Fujita, M. and Oida, C. (1987). Theory and Experiment of Magnetic
Bearing Combining Radial Control and Thrust Control. IEEE Transaction on
Magnetics. September. MAG-23(5): 2581-2583.

183
Matsumura, F., Fujita, M. and Okawa K.(1990). Modeling and Control of Magnetic
Bearing Systems Achieving a Rotation Around the Axis of Inertia. 2nd
International Symposium on Magnetic Bearing. July. Tokyo, Japan: 273-280.
Matsumura, F., Namerikawa, T., Hagiwara, K. and Fujita, M. (1996). Application of
Gain Scheduled H∞ Robust Controller to a Magnetic Bearing. IEEE
Transaction. on Control System Technology. September. 4(5): 484-493.
Matsumura, F., Namerikawa, T. and Murata, N. (1999). Wide Area Stabilization of a
Bearing Using Exact Linearization. Electrical Engineering in Japan. 128(2):
53-62.
Mohamed, A.M. and Emad, F.P. (1992). Conical Magnetic Bearings with Radial and
Thrust Control. IEEE Transaction on Automatic Control. Dec. 37(12): 1859-
1868.
Mohamed, A. M. and Emad, F. P. (1993). Comparison Between Current and Flux
Control in Magnetic Bearing Systems. In Proceedings of the American
Control. Conference, June 1993. 2356-2362.
Mohamed, A. M., Matsumura, F., Namerikawa, T., Lee J. H. (1997a). Q-
parameterization Control of Vibration in a Variable Speed Magnetic Bearing.
Proceeding of IEEE International Conference on Control Application,
October: 540-546.
Mohamed, A. M., Matsumura, F., Namerikawa, T., Lee J. H. (1997b) .Modeling and
Robust Control of Self-sensing Magnetic Bearing with Unbalance
Compensation. Proceeding of IEEE International Conference on Control
Application, October : 586-594.
Mohamed, A. M., Hassan, I. M., Hashem, A. M. K. (1999). Elimination of
Imbalance Vibrations in Magnetic bearing System Using Discrete-Time Gain-
Scheduled Q-Parameterization Controllers. Proceeding of IEEE International
Conference on Control Application, August. 737-742
Montee, N., De Queiroz M. S., Fang, Y. and Dawson D. M. (2002). Active Magnetic
Bearing Control with Zero Steady-State Power Loss. Proceedings of the
American Control Conference. May 8-10. Anchorage, AK, USA : 827-832.
Mukhopadhyay, S. C., Ohji, T., Iwahara, M. and Yamada, S. (2000). Modeling and
Control of a New Horizontal-Shaft Hybrid-Type Magnetic Bearing. IEEE
Transaction on Industrial Electronics. February. 40(1): 2-22.
184
Mukhopadhyay, S. C., Ohji, T., Iwahara, M., Yamada, S. and Matsumura, F. (1997).
Disturbance Attenuation and H∞ Control of Repulsive Type Magnetic Bearing.
IEEE Transaction on Magnetics. September. 33(5): 4233-4235.
Namerikawa, T. and Fujita, M. (2004). H∞ DIA Control of Magnetic Suspension
System. Proceedings of IEEE International Conference on Control
Application. Sept. 2-4. Taiwan: 1697-1702.
Namerikawa, T. and Shinozuka, W. (2004). H∞ Control of Magnetic Bearing System
Considering Initial State Uncertainties. IEEE International Workshop on
Advance Motion Control-AMC . Kawasaki, Japan: 275-280.
Namerikawa, T. and Fujita, M. (1999). Uncertain Model and μ-Synthesis of a
Magnetic Bearing. In Proceedings of IEEE International Conference on
Control Application. August 22-27. Hawaii, USA: 558-563.
Nesterov, Y. and Nemirovski, A. (1994). Interior Point Polynomial Methods in
Convex Programming: Theory and Applications. SIAM. Philadelphia, USA.
Nonami, K. and Ito, T. (1996). μ-Synthesis of Flexible Rotor-Magnetic Bearing
Systems. IEEE Transaction on Control System Technology. September. 4(5):
503-512.
Ogata, K. (2001). Modern Control Engineering-4th Edition. Prentice Hall. New
Jersey, USA.
Okada, Y. and Nonami, K. (2002). Research Trend on Magnetic Bearings. JSME
International Journal. Series C, 46(2): 341-343.
Osman, J. H. S. (1991). Decentralized and Hierarchical Control of Robot
Manipulator. Ph.D. Thesis, City University, London, UK.
Osman, J. H. S. and Roberts, P.D. (1995). Two-level Control Strategy for Robot
Manipulator. International Journal of Control. June. 61(6): 1201-1222.
Polajzer, B., Ritonja, J., Stumberger, G., Dolinar, D. and Lecointe, J. P. (2006).
Decentralized PI/PD Position Control for Active Magnetic Bearings.
Electrical Engineering. 89: 53-59.
Rundell, A. E., Drakunov, S. V. and DeCarlo, R. A. (1996). A Sliding Mode
Observer and Controller for Stabilization of Rotational Motion of Vertical
Shaft Magnetic Bearing. IEEE Transaction on Control System Technology.
September. 1996. 4(5): 598-608.
Saberi, A., Sannuti, P. and Chen. B. (1995). H2 Optimal Control. Prentice Hall.
London, UK.

185
Sahinkaya, M. N, Hartavi, A. E. (2007). Variable Bias Current in Magnetic Bearings
for Energy Optimization. IEEE Transaction on Magnetics. March. 43(3):
1052-1060.
Sahinkaya, M. N, Adulrub A. –H. G. and Keogh P. S. (2004). On the Modelling of
Flexible Rotor Magnetic Bearing Systems When in Contact with Retainer
Bearings. Proceedings of Ninth International Symposium on Magnetic
Bearings. August, 3-6. Kentucky, USA. 1-6.
Sam, Y. M., Osman, J. H. S. And Ghani, M. R. A. (2004). A Class of Proportional-
Integral Sliding Mode Control with Application to Active Suspension System.
Systems and Control Letters. 51:217-223.
Scherer C. and Weiland, S. (2004). Linear Matrix Inequalities in Control. Lecture
Notes in DISC Course. Holland.
Scherer C., Gahinet, P., and Chilali, M. (1997). Multiobjective Output-Feedback
Control via LMI Optimization. IEEE Transaction on Automatic Control. July.
42(7): 896-911.
Schroder, P, Green, B., Grum, N. and Flemming, P. J. (2001). On-line evolution of
robust control system: an active magnetic bearing application. Control
Engineering Practice. 9: 37-49.
Sellami, A., Arzelier D, M’hiri, R. and Zrida, J. (2007). A Sliding Mode Control
Approach for System Subjected to a Norm-bounded uncertainties.
International Journal of Robust and Nonlinear Control. 17:327-346.
Shafai, B., Beale S., LaRocca, P. and Cusson, E. (1994). Magnetic Bearing Control
System and Adaptive Forced Balancing. IEEE Control Systems Magazine.
April. 14(2): 4-13.
Shen, J. X., Tseng, K. J., Vilathagamuwa, D. M. and Chan W. K. (2000). A Novel
Compact PMSM with Magnetic Bearing for Artificial Heart Application. IEEE
Transaction on Industrial Applications. July/August. 36(4) :1061-1068.
Shi, J., Zmood, R. and Qin, L. (2004). Synchronous disturbance attenuation in
magnetic bearing using adaptive compensation signals. Control Engineering
Practice. 12: 283-290.
Sivrioglu, S. (2007). Adaptive backstepping for switching control active magnetic
bearing system with vibrating base. IET Proceedings on Control Theory
Application. 1(4): 1054-1059.

186
Sivrioglu, S. and Nonami, K. (2003). Adaptive Backstepping Control Design for
Flywheel Zero-Bias AMB. In Proceedings of IEEE Conference on Control
Application. June 23-25. Istanbul, Turkey: 1106-1111.
Sivrioglu, S. and Nonami, K. (1998). Sliding Mode Control with Time-Varying
Hyperplane for AMB Systems. IEEE/ASME Transaction on Mechatronics.
March. 3(1): 51-59.
Skogestad, S. and Postlethwaite, I. (2005). Multivariable Feedback Control: Analysis
and Design. Wiley. England.
Slotine, E. J. J. and Li, W. (1991). Applied Nonlinear Control. Prentice Hall. New
Jersey, USA.
Smith, R. D. and Weldon, W. F. (1995). Nonlinear Control of a Rigid Magnetic
Bearing System: Modeling and Simulation with Full State Feedback. IEEE
Transactions on Magnetics. March. 31(2): 973-980.
Stepanenko, Y., Cao, Y. and Su, C. Y. (1998). Variable Structure Control of Robotic
Manipulators with PID Sliding Surface. International Journal of Robust and
Nonlinear Control. 8: 79-90.
Sturm, J. F. (1999). Using SeDuMi 1.02, a MATLAB toolbox for optimization over
symmetric cones. Optimization Methods and Software- Special issue on
Interior Point Methods : 625-653.
Takahashi, R. H. C. and Peres, P. L. D. (1999). H2 Guaranteed Cost-Switching
Surface Design for Sliding Modes with Nonmatching Disturbances. IEEE
Transactions on Automatic Control. 44(11): 2214-2218.
Takahashi, R. H. C. and Peres, P. L. D. (1998). H∞ Design of Switching Surface for
Sliding Modes Control with Nonmatching Disturbances. IEE Proceedings on
Control of Theoretical Applications. 145: 435-441.
Tian, H. (1999). Robust Control of Spindle-Magnetic Bearing System Using Sliding
Mode Control and Variable Structure System Disturbance Observer. Journal of
Vibration and Control. 5: 277-298.
Tsiotras, P. and Wilson, B. (2003). Zero- and Low-Bias Control Designs for Active
Magnetic Bearings. IEEE Transaction on Control System Technology. Nov.
11(6): 889-904.
Tsiotras, P. and Arcak, M. (2005). Low-Bias Control of AMB Subject to Voltage
Saturation: State-Feedback and Observer Designs. IEEE Transaction on
Control System Technology. Marc. 13(2): 262-273.

187
Trumper, D. L., Olson, S. M. and Subrahmanyan, P. K. (1997). Linearizing Control
of Magnetic Suspension Systems. IEEE Transaction on Control System
Technology. July. 5(4): 427-438.
Tsai, N. C., Kuo, C. H., and Lee, R. M. (2007). Regulation on radial position
deviation for vertical AMB systems. Mechanical Systems and Signal
Processing. 21: 2777-2793.
Utkin, V. and Shi, J. (1996). Integral Sliding Mode in System Operating Under
Uncertainty Condition. In Proceedings of the IEEE Conference on Decision
and Control. December 11-13, Kobe, Japan; 4591-4596.
Utkin, V. (1992). Sliding Mode Control in Optimization. Springer. Berlin.
Utkin, V. (1977). Variable Structure Systems with Sliding Mode. IEEE Transactions
on Automatic Control. 22(2): 212-222.
VanAntwerp, J. G., and Braatz, R. D. (2000). A Tutorial on linear and bilinear matrix
inequalities. Journal of Process Control. 10: 363-385
Williams, R.D., Keith, F.J. and Allaire, P.E. (1990). Digital control of active
magnetic bearings. IEEE Transactions on Industrial Electronics. February.
37(1): 19 – 27.
Wilson, B. C. D. (2004). Control Design for Low-Loss Active Magnetic Bearing:
Theory and Implementation. Ph.D. Thesis, Georgia Institute of Technology,
USA.
Yang, G. H., and Wang, J. L. (2000) Suboptimal Static Output Feedback Control. In
Proceedings of 39th IEEE Conference on Decision and Control. Dec. Sydney,
Australia. 3676-3681.
Yao, B., and Tomizuka, M. (1994). Smooth Robust Adaptive Sliding Mode Control
of Manipulators With Guaranteed Transient Performance. Trans. ASME Jour.
of Dynamic System, Measurement, and Control. 118: 601-616.
Yeh, T. J., Chung, Y. J., and Wu, W. C. (2001a). Sliding Control of Magnetic
Bearing System. ASME Journal of Dynamic System, Measurement, and
Control. September. 118: 764-775.
Yeh, T. J., Chung, Y. J., and Wu, W. C. (2001b). Robust Control of multi-axis
magnetic bearing systems. International Journal of Robust and Nonlinear
Control. September. 11: 1375-1395.
Young, K. D., and Ozguner, U. (1997). Sliding-Mode Design for Robust Linear
Optimal Control. Automatica. 33(7): 1313-1323.

188
Young, K. D., Utkin, V., and Ozguner, U. (1999). A Control Engineer’s Guide to
Sliding Mode Control. IEEE Transactions on Control System Technology. May
1999. 7(3): 328-342.
Zhang, D. Q., and Panda, S. K. (1999). Chattering-free and fast-response sliding
mode controller. IEE Proceeding on Control Theory and Applications. 146(2):
171-177.
Zhang, H., Lin, Z., Huang, B. and Allaire, P. (2002). A Convex Optimization
Approach to Robust Controller Design for Active Magnetic Bearing
Suspension Systems. In Proceedings of 8th International Symposium on
Magnetic Bearing. August 26-28. Mito, Japan. 477-482.
Zhou, K. and Doyle, J. C. (1997). Essential of Robust Control. Prentice Hall. New
Jersey, USA.
Zhou, K., Doyle, J. C. and Glover, K. (1996). Robust and Optimal Control. Prentice
Hall. New Jersey, USA.
Zhuravlyov, Y. N. (2000). On LQ-control of magnetic bearing. IEEE Transaction on
Control System Technology. 8(2): 344-350.

197
APPENDIX A
A ESSENTIAL THEORETICAL BACKGROUNDS
In this appendix, essential theoretical background which state the
fundamental knowledge needed to arrive at the main results proposed in the main
content are outlined. Most of these materials can be found in many established
papers and books where some of them are included in the references. The necessary
important Lemmas resulted from the derivation are also stated.
A1.1 Optimal State feedback control
Optimal state feedback control design is a linear quadratic regulator (LQR)
problem. Based on (Anderson and Moore, 1990; Chen, 2000), consider a state space
system represented by
(A1.1)
(A1.2)
where is the system state with given initial condition 0 , is the
control input is the measured output and , and are system, input and
output matrices of appropriate dimension. This LQR problem is to find the input
signal that minimizes the cost function
(A1.3)
where and are symmetric positive definite matrices which penalize the
deviation of the state from the origin and the magnitude of the control signal,
respectively. The input will be in the form

190
(A1.4)
where
(A1.5)
and 0 is the unique positive semi-definite solution of the algebraic
Riccati equation
0 (A1.6)
The solution of the Riccati equation (A1.6) will lead to the solution of the controller
gain that takes the system to zero state ( 0) in an optimal controller effort.
A1.2 H2 norm and H2 Control
Consider the system (A1.1) - (A1.2) in a more general form as follows:
(A1.7)
(A1.8)
(A1.9)
where is the external disturbance and is the controlled output. The
system (A1.7) – (A1.9) is in the same structure of system (3.36) as shown in Figure
3.5. If the transfer function of the system in frequency domain is represented by
, , then it is defined that the H2- norm of the closed-loop system as
, , , (A1.10)
This H2 norm represents the total energy that corresponds to the impulse response of
the closed-loop transfer function , for an impulsive input or impulsive
disturbance in the form

191
(A1.11)
where is the j-th basis vector in the standard basis of the input space or
disturbance space (Scherer and Weiland, 2004; Dullerud and Paganini, 2005;
Chen, 2000). In order to obtain the H2- norm of the system (A1.7)-(A1.9), rather than
evaluating the (A1.10) term directly, this norm can be conveniently calculated in
time-domain. Let denotes the j-th column of impulse response of
, for impulse disturbance, then
, ∑
∑
(A1.12)
in which the last term follows by using the Plancherel Theorem (Dullerud and
Paganini, 2005). Then, using the linearity property of trace, this further reduces to
,
(A1.13)
where the matrix is the observability Grammian denoted by
(A1.14)
and it is a solution to the Lyapunov equation
0 (A1.15)
For H2 control problem for controller in the structure (A1.4), the standard
optimization problem is to find controller gain such that when it is applied to
system (A1.7)-(A1.9), the H2 norm of the closed-loop transfer function is minimized
(Saberi et al. 1995). Based on this result, as stated in (Yang and Wang, 2000) and

192
(Chen, 2000) the following Lemma can be proposed for the solution of the H2
problem.
Lemma B1. (Yang and Wang, 2000; Chen. 2000)
Let ℓH > 0 be a given constant. Then solves the suboptimal H2 static
state-feedback control problem if and only if there exists a positive-definite matrix
such that
0,
(A1.16)
ℓ (A1.17)
Proof: The detail proof can be found in (Chen, 2000; Zhou et.al., 1996; Dullerud and
Paganini, 2005; Scherer and Weiland, 2004)
A1.3 Linear Matrix Inequality (LMI)
Linear Matrix Inequalities (LMI) itself is a very broad topic and their
existence in the analysis of dynamical system can be traced back over 100 years
since the work of Lyapunov (Boyd et al., 1994; Skogestad and Postlethwaite, 2005).
Thus, in this section, only the essential materials that are used in this work which is
to design the multi-objective sliding surface are reviewed and the more intensive
tutorial can be found in (Boyd et al., 1994; Skogestad and Postlethwaite, 2005;
VanAntwerp and Braatz, 2000; Scherer and Weiland, 2004).
The basic structure of an LMI is
∑ 0 (A1.18)
where is a vector whose scalar elements are the so-called LMI decision
variable(s) and and are given constant symmetric real matrices. The inequality
in (A1.18) implies that is positive definite.

193
A1.3.1 LMI Problems
From theoretical viewpoint LMI problems can be categorized into three
distinguish problems:
i. Feasibility problem: find the value for the LMI decision variables
that satisfy the LMI set (A1.18) to hold. In other words, if the solution
, … , such that
, … , 0 (A1.19)
exists, then the problem is said to be feasible.
ii. Linear objective minimization problem: minimize some linear scalar
function, , of the matrix variable, subject to LMI constraints:
min , … , (A1.20)
s.t. , … , 0 (A1.21)
In this problem, optimizations of some quantities (A1.20) are to be
found whilst ensuring the LMI constraints (A1.21) are still satisfied.
In some literature, this problem is also called eigenvalue problem.
iii. Generalized eigenvalue problem (GEVP): minimize objective
function in which the optimization is not convex, but quasi-convex.
Formally, it can be represented as
min l (A1.22)
s.t. , … , , … , 0 (A1.23)
, … , 0 (A1.24)
, … , 0 (A1.25)
194
As highlighted in (VanAntwerp and Braatz, 2000; Boyd et al. 1994),
(A1.22) and (A1.23) are equivalent to minimizing the maximum
generalized eigenvalues, which is a quasiconvex objective function
that is subjected to LMI constraints.
A1.3.2 Schur Complement
Although there are many control problems can be cast as LMI, however, most
of them need to be transformed into a suitable LMI sets. Schur complement is one of
the most extensively used lemma to convert a class of convex nonlinear inequalities
into a convex representation and it can be stated as follows:
Given the convex nonlinear inequalities as:
0, (A1.26)
0 (A1.27)
where , and depends affinely on . Then Schur
complement (Boyd et al., 1994) converts (B1.26)-(B1.27) into the equivalent LMI
set
0 (A1.28)
Other useful tricks that are used to achieve convex representation of nonconvex
problems are the S-procedure, projection and Finsler’s lemmas. Since these tools are
not used in this works, their descriptions are omitted and can be found in the related
reference.

195
A1.3.3 LMI example
To illustrate the application of LMI in conventional control problem, the
design of optimal state feedback for the system (A1.1)-(A1.2) with the system triple
, , is considered. This LQR problem is to find the input signal that
minimizes the cost function (A1.3) in which the input controller is (A1.4). With
0 is the unique positive semi-definite solution of the algebraic Riccati
equation (A1.6), the solution will yield the design controller gain (A1.5).
Alternatively, the solution can be conveniently can be found by forming (A1.6) as a
linear convex constraint and cast as an LMI optimization problem. By using Schur
complement on (A1.6), the problem can be cast as an LMI set which yield
0 (A1.29)
where , and . Notice that when
converting (A1.6) into LMI optimization problem, the equality is changed to
inequality where the LMI algorithm will converge to produce an optimal solution.
LMI set (A1.29) can be solved by many available LMI solvers such as LMI Toolbox
(Gahinet et al., 1995) and YALMIP/SeDuMi (Lofberg, 2004) using efficient interior
point algorithm developed by (Nesterov and Nemirovsky, 1994).

196
APPENDIX B
B LMI SOLVERS
In this appendix, a simple example of LMI program by using the LMI solver
available in LMI Toolbox and YALMIP/SeDuMi is demonstrated. A DC Motor
control from (Edwards and Spurgeon, 1998) with LQR control from Appendix B will
be used to illustrate step-by-step programming process to obtain the solution by
using both LMI solvers. As for comparison, the solution obtained by using ‘are’
command in Matlab to solve the Riccati equation (A1.6) is also included. In addition,
since LQR controller can also be obtained by using ‘lqr’ command, the associated
controller gain will also be calculated for benchmarking.
B1.1 Example: LQR for DC Motor Control
Consider the DC motor system with the following system and input matrices:
0 1 00 / /0 / /
, 00
1/
where the parameters are:
b = 0, R = 1.2, Lo = 0.05, Ke = 0.6; Kt = 0.6; J = 0.1352

197
The LQR control problem is to find the gain KL for control (B1.4) that minimizes the
cost function (B1.3) by solving LMI set (B1.29). The calculated controller gain
obtained by using the ‘lqr’ and ‘are’ commands are as shown in the following
program. %============================================================= % Program to solve LMI set (A1.29) using % Algebraic Riccati Equation solver, 'ARE' and 'LQR' command % EXAMPLE: LQR for DC motor Control % File for Appendix B1.1 %============================================================= clear clc R=1.2; % System Parameters Lo=0.05; Ke=0.6; Kt=0.6; J=0.1352; b=0; As=[0 1 0;0 -b/J Kt/J;0 -Ke/Lo -R/Lo]; % System Matrix As Bs=[zeros(2,1);1/Lo]; % Input matrix Bs Cs=eye(3); % Output Matrix n=size(As,1); Q1=[1 0 0]; QL=Q1'*Q1; % Choose QL RL=0.04; % Choose RL X_ARE=are(As,Bs*inv(R)*Bs',QL); % Call ARE KL_ARE=inv(R)*Bs'*X_ARE; % Calculate gain based on ARE KL_LQR=lqr(As,Bs,QL,RL); % Calculate gain based on LQR disp(sprintf('Controller gain calculation using ARE and LQR command')) disp(sprintf('\nThe Controller Gain KL_ARE:\n [%.4f %.4f %.4f]',KL_ARE(1),KL_ARE(2),KL_ARE(3))) disp(sprintf('\nThe Controller Gain KL_LQR:\n [%.4f %.4f %.4f]',KL_LQR(1),KL_LQR(2),KL_LQR(3)))
Program output:
Controller gain calculation using ARE and LQR command The Controller Gain KL_ARE: [0.9129 0.3374 0.0608] The Controller Gain KL_LQR: [5.0000 1.2855 0.2179]

198
B1.2 LMI solution using LMI Toolbox %============================================================= % Program to solve LMI set (A1.29) using % MATLAB LMI Toolbox % EXAMPLE: LQR for DC motor Control % File for Appendix B1.2 %============================================================= clear clc R=1.2; % System Parameters Lo=0.05; Ke=0.6; Kt=0.6; J=0.1352; b=0; As=[0 1 0;0 -b/J Kt/J;0 -Ke/Lo -R/Lo]; % System Matrix As Bs=[zeros(2,1);1/Lo]; % Input matrix Bs Cs=eye(3); % Output matrix, Cs n=size(As,1); Q1=[1 0 0]; QL=Q1'*Q1; % Choose QL RL=0.04; % Choose RL setlmis([]); % Initialize LMI XL=lmivar(1,[n 1]); % Specify structure of LMI lmi1=newlmi; % Define LMI 1: (B1.29) lmiterm([lmi1,1,1,XL],-1,As,'s'); % As'*XL + XL*As lmiterm([lmi1,1,1,0],-QL); % QL lmiterm([lmi1,1,2,XL],-1,Bs); % XL*Bs lmiterm([lmi1,2,2,0],-RL); % -RL lmi2=newlmi; % Define LMI 2: Lyapunov
% Matrix lmiterm([-lmi2,1,1,XL],1,1); % XL>0 lmis1=getlmis; % Construct the system LMIs [tmin,xfeas] = feasp(lmis1); % Call feasp() solver X_feasp=dec2mat(lmis1,xfeas,XL); % Obtain the solution KL=inv(R)*Bs'*X_feasp; % Calculate controller gain disp(sprintf('Controller gain calculation using LMI Toolbox')) disp(sprintf('\nThe Controller Gain, KL:\n [%.4f %.4f %.4f]’,KL(1),KL(2),KL(3)))

199
Program output: Solver for LMI feasibility problems L(x) < R(x) This solver minimizes t subject to L(x) < R(x) + t*I The best value of t should be negative for feasibility Iteration : Best value of t so far 1 0.149596 2 0.022715 *** new lower bound: -0.072285 3 0.022715 4 4.539761e-003 *** new lower bound: -0.039099 5 2.616244e-003 *** new lower bound: -0.023191 6 2.616244e-003 *** new lower bound: -5.571032e-003 7 1.780198e-003 8 7.108678e-004 *** new lower bound: -3.819791e-003 9 7.108678e-004 *** new lower bound: -8.752322e-004 10 3.043904e-004 11 3.933471e-005 *** new lower bound: -5.099013e-004 12 3.933471e-005 *** new lower bound: -9.314952e-005 13 1.444689e-005 14 1.160355e-005 *** new lower bound: -1.690601e-005 15 1.740723e-006 16 1.740723e-006 *** new lower bound: -3.490412e-006 17 -8.197443e-008 Result: best value of t: -8.197443e-008 f-radius saturation: 0.000% of R = 1.00e+009 Controller gain calculation using LMI Toolbox The Controller Gain, KL: [0.1125 0.0260 0.0043]

200
B1.3 LMI solution using Yalmip/SeDuMi
%============================================================= % Program to solve LMI set (A1.29) using % YALMIP/SeDuMi % EXAMPLE: LQR for DC motor Control % File for Appendix B1.3 %============================================================= clear clc R=1.2; % System Parameters Lo=0.05; Ke=0.6; Kt=0.6; J=0.1352; b=0; As=[0 1 0;0 -b/J Kt/J;0 -Ke/Lo -R/Lo]; % System Matrix As Bs=[zeros(2,1);1/Lo]; % Input matrix Bs Cs=eye(3); % Output matrix, Cs n=size(As,1); Q1=[1 0 0]; QL=Q1'*Q1; % Choose QL RL=0.04; % Choose RL XL=sdpvar(n,n,'symmetric'); % Define LMI variable F=XL>0; % Lyapunov Matrix, LMI 1 F=[F,[As'*XL+XL*As+QL XL*Bs;Bs'*XL RL]>0];% LMI 2 - (B1.29) solvesdp(F); % Call SeDuMi LMI solver X_SeDuMi=double(XL); % Convert double KL=inv(R)*Bs'*X_SeDuMi; % Calculate controller gain disp(sprintf('Controller gain calculation using YALMIP-SeDuMi')) disp(sprintf('\nThe Controller Gain, KL:\n [%.4f %.4f %.4f]',KL(1),KL(2),KL(3)))
Program output: SeDuMi 1.1R3 by AdvOL, 2006 and Jos F. Sturm, 1998-2003. Alg = 2: xz-corrector, theta = 0.250, beta = 0.500 eqs m = 6, order n = 8, dim = 26, blocks = 3 nnz(A) = 21 + 0, nnz(ADA) = 36, nnz(L) = 21 it : b*y gap delta rate t/tP* t/tD* feas cg cg prec 0 : 6.13E+002 0.000 1 : 0.00E+000 1.29E+002 0.000 0.2110 0.9000 0.9000 1.43 1 0 1.6E+001 2 : 0.00E+000 3.09E+001 0.000 0.2389 0.9000 0.9000 1.69 1 1 3.1E+000 3 : 0.00E+000 3.02E+000 0.000 0.0978 0.9900 0.9900 1.82 1 1 5.0E-001 4 : 0.00E+000 7.27E-001 0.000 0.2407 0.9000 0.9000 1.17 1 1 3.3E-001 5 : 0.00E+000 3.02E-002 0.000 0.0416 0.9900 0.9900 1.09 1 1 1.3E-002 6 : 0.00E+000 5.19E-003 0.000 0.1716 0.9000 0.9000 0.90 1 1 2.3E-003 7 : 0.00E+000 1.46E-003 0.000 0.2811 0.9000 0.9000 1.03 1 1 6.2E-004 8 : 0.00E+000 3.61E-004 0.000 0.2473 0.9000 0.9000 1.31 1 1 1.1E-004 9 : 0.00E+000 8.06E-006 0.000 0.0223 0.9900 0.9900 1.23 1 1 2.0E-006 10 : 0.00E+000 1.65E-010 0.000 0.0000 1.0000 1.0000 1.01 1 1 4.0E-011 iter seconds digits c*x b*y 10 0.1 5.7 1.6161402839e-013 0.0000000000e+000 |Ax-b| = 2.8e-012, [Ay-c]_+ = 0.0E+000, |x|= 7.7e-008, |y|= 3.0e-001 Detailed timing (sec) Pre IPM Post 3.004E-002 5.007E-002 0.000E+000 Max-norms: ||b||=0, ||c|| = 1, Cholesky |add|=0, |skip| = 0, ||L.L|| = 18894.7. Controller gain calculation using YALMIP-SeDuMi The Controller Gain, KL: [0.1358 0.0326 0.0055]
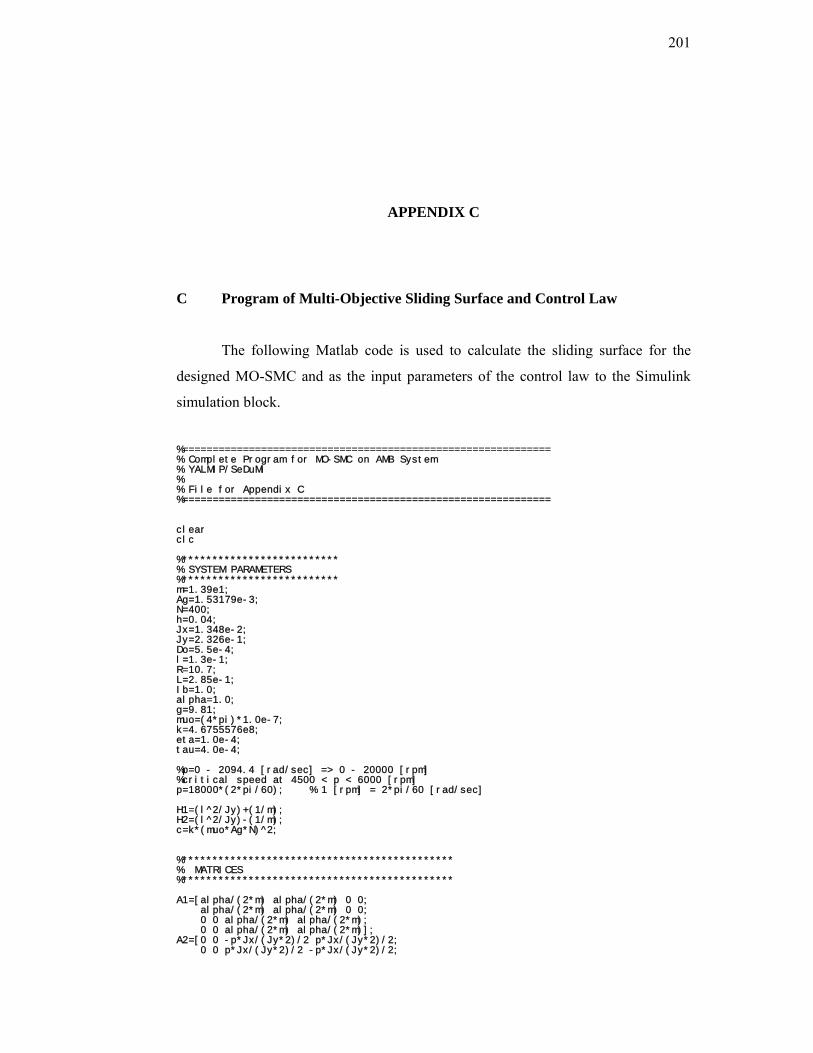
201
APPENDIX C
C Program of Multi-Objective Sliding Surface and Control Law
The following Matlab code is used to calculate the sliding surface for the
designed MO-SMC and as the input parameters of the control law to the Simulink
simulation block.
%============================================================= % Complete Program for MO-SMC on AMB System % YALMIP/SeDuMi % % File for Appendix C %============================================================= clear clc %************************** % SYSTEM PARAMETERS %************************** m=1.39e1; Ag=1.53179e-3; N=400; h=0.04; Jx=1.348e-2; Jy=2.326e-1; Do=5.5e-4; l=1.3e-1; R=10.7; L=2.85e-1; Ib=1.0; alpha=1.0; g=9.81; muo=(4*pi)*1.0e-7; k=4.6755576e8; eta=1.0e-4; tau=4.0e-4; %p=0 - 2094.4 [rad/sec] => 0 - 20000 [rpm] %critical speed at 4500 < p < 6000 [rpm] p=18000*(2*pi/60); % 1 [rpm] = 2*pi/60 [rad/sec] H1=(l^2/Jy)+(1/m); H2=(l^2/Jy)-(1/m); c=k*(muo*Ag*N)^2; %********************************************* % MATRICES %********************************************* A1=[alpha/(2*m) alpha/(2*m) 0 0; alpha/(2*m) alpha/(2*m) 0 0; 0 0 alpha/(2*m) alpha/(2*m); 0 0 alpha/(2*m) alpha/(2*m)]; A2=[0 0 -p*Jx/(Jy*2)/2 p*Jx/(Jy*2)/2; 0 0 p*Jx/(Jy*2)/2 -p*Jx/(Jy*2)/2;

202
p*Jx/(Jy*2)/2 -p*Jx/(Jy*2)/2 0 0; -p*Jx/(Jy*2)/2 p*Jx/(Jy*2)/2 0 0]; E4=zeros(4,4); I=eye(4,4); A=[E4 I; % Matrix A A1 A2]; B1=[254.3761 1.440 0 0; 1.440 254.3761 0 0; 0 0 254.3761 1.440; 0 0 1.440 254.3761]; B=[E4; % Matrix B B1]; C=[eye(4) zeros(4,4)]; %********************************************* % CONTROLLABILITY %********************************************* CTRB_RANK=rank(ctrb(A,B))-rank(A); % =0 (So (A,B) is controllable rank(ctrb(A,B)); rank(A); %********************************************* % TRANSFORM TO SPECIAL REGULAR FORM %********************************************* [n,m]=size(B); [Q,R]=qr(B); T=flipud(Q'); Bnew=T*B; B2=Bnew((n-m+1):n,:); T2=[eye(n-m) zeros((n-m),(n-m));zeros((n-m),(n-m)) inv(B2)]; T_complete=T2*T; % The transformation matrix % New transformed matrix Anew=T_complete*A*inv(T_complete); Bnew=T_complete*B; Cnew=C*inv(T_complete);
% Using 'SIGMA' test after % transformation
sys1=ss(A,B,C,0); % Original nominal system sys2=ss(Anew,Bnew,Cnew,0); % New transformed system subplot(2,1,1) sigma(sys1) title('SV for original system') subplot(2,1,2) sigma(sys2) title('SV for transformed system') A11=Anew(1:n-m,1:n-m); A12=Anew(1:n-m,n-m+1:n); A21=Anew(n-m+1:n,1:n-m); A22=Anew(n-m+1:n,n-m+1:n); B2=Bnew(n-m+1:n,1:m); %*********************************************** % DESIGN OF SLIDING SURFACE, S %*********************************************** alpha=-1000; % Controller parameters Qq=[15*eye(m) zeros(4,4)];%0.1*eye(m)]; Qj=Qq'*Qq; R=0.5*eye(4); theta=2*pi/9; % damping factor 2*pi/9 = 40degree p1=3500; % right vertical axis p2=50; [q,s]=size(Qq); At=Anew; % New System Bt=[-A12;alpha*eye(m)-A22]; %*********************************************** % DESIGN LMI VARIABLES %*********************************************** X1=sdpvar(n-m,n-m,'symmetric'); X2=sdpvar(m,m,'symmetric'); N1=sdpvar(m,n-m,'full'); Z=sdpvar(n,n,'symmetric');

203
X=blkdiag(X1,X2); N=[N1 X2]; %*********************************************** % DEFINING LMI TERMS %*********************************************** F=X>0; F=[F,[At*X+X*At'+Bt*N+(Bt*N)' X*Qq' N'*sqrt(R);Qq*X -eye(q) zeros(q,m); sqrt(R)*N zeros(m,q) -eye(m)]<0]; F=[F,[-Z (alpha*eye(n)-At)';(alpha*eye(n)-At) -X]<0]; F=[F,[(A11*X1+X1*A11'-A12*N1-N1'*A12')*sin(theta) (A11*X1-A12*N1-X1*A11'+N1'*A12')*cos(theta); (X1*A11'-N1'*A12'-A11*X1+A12*N1)*cos(theta) (A11*X1+X1*A11'-A12*N1-N1'*A12')*sin(theta)]<0]; F=[F,(A11*X1+X1*A11'-A12*N1-N1'*A12'+2*p2*X1)<0]; F=[F,(A11*X1+X1*A11'-A12*N1-N1'*A12'+2*p1*X1)>0]; %*********************************************** % CALL THE SOLVER %*********************************************** solvesdp(F,trace(Z)) Lt=double(N)*inv(double(X)) ; %Lt=N*X-1 (Eq. 29) M=double(N1)*inv(double(X1)); %M=N1*X1-1(Eq. --) S=S1*[M Im] Xout=eye(n,n)*double(X); L=Lt*(alpha*eye(n)-At); traceZ=trace(double(Z)); traceX=trace((alpha*eye(n)-At)'*inv(double(X))*(alpha*eye(n)-At)) sqrtX=sqrt(traceX); disp(sprintf('H2 cost is = %6.4e',sqrtX)) %*********************************************** % CONTROLLER PARAMETERS %*********************************************** K=-alpha*eye(m) S2=eye(m); S=[M S2]*T_complete'; SBinv=inv(S*B); SBK=SBinv*K; SA=S*A; Q=SBinv*SA; BS=B'*S'; rho=10.7; %ET=0.5; ET=0.0005; z=0.01; S %****************************** % TEST EIGENVALUES %****************************** Cl=A11-A12*M; Eig=eig(Cl)
Related Documents











