MS SERVO 기술자료 유도 전동기를 사용한 모터 제어기 고유 모터 제어 언어를 가지고 있는 제어기 〒608-739 부산광역시 남구 용당동 산100 부경대학교 산학협력관 412호 TEL 051 – 629 - 7900 FAX 051 - 629 - 7901 URL http://www.mstechno.net E-mail [email protected]

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MS SERVO 료
도 전동기를 사용한 모터 제어기
고 모터 제어 언어를 가지고 는 제어기
〒608-739
산 역시 남 당동 산100
경 학 산학 412
TEL 051 – 629 - 7900
FAX 051 - 629 - 7901
URL http://www.mstechno.net
E-mail [email protected]

차
1. 특징 ---------------------------- 1
2. 내 ---------------------------- 2
3. AC 사양 ---------------------------- 3
4. DC 사양 ---------------------------- 6
5. H/W
5-1 주 I/O ---------------------------- 7
5-2 ---------------------------- 12
6. S/W
6-1 시 타 ---------------------------- 13
6-2 MSCL 언어 ---------------------------- 15
6-3 Error 정 ---------------------------- 17
7. 주 사항 ---------------------------- 20

1. 특징
MSB 시 (200V), MSBH 시 (400V) MS SERVO가 상식 꾸었 니다.
전동 는 훌 한 는 니다. MS SERVO는 그 냈 니다.
뛰어난 SERVO 답 능
사 프 그 에 한 가 ·감 . 고정 결정 제어.동 전제어
전, 저 전에 크 300% 상 실 , 정 (0Hz)에 강 한 브 크 동
MS SERVO 한 능
MSCL 제어언어( 사 개 언어) 사 한 컨트
저 , 시퀀 (DIO) /출 , 아날 그 출
시 얼 신 네트워크 (RS422,RS232C 비)
PC에 동 프 그 (알고 ) (RS232C)
동 MS SERVO제어 업그 드
DC 24V,DC48V
전 동차, 무 차(AGV), 골프 , , 시 등 저전압 전동
-1-

2. 내
MITY SERVO는 CPU , 주 , 전원 어 니다.
● CPU è CPU 는 프 , 제어 , /출 어 니다.
프 에는, operating system(OS)가 저 어 니다.
또, RAM, 플 ( 저 프 그 ) 내 하고 니다.
● 전원 è 전원 는 전 DC-DC 컨 사 해,
CPU , 워 에 제어 전원 공 하고 니다.
● 주 è 주 는, 정 , , 워 생 에
고 니다. 주 에는 전원(삼상 AC200V R, S, T)
(U, V, W) 생 저항(P, S0) 접 합니다.
-2-
라 드라 식
32 bit 마 크 컴퓨
탑재 CPU
키보드
DC-DC
원
주전원ON
주전원OFF
MC
MC
삼상AC200V
(50Hz/60Hz)
워 듈
회생저항(외부부착)
3 지
지
DC24V
( 전원)
시퀀 in out
시리얼 통신
PG
N
P
S0
U
V
W
E
IM
정
생 트랜지
S
T
R

3. AC 사양
MSB 타 (200V )
종
사 양
MSB MSB
01 02 04 08 15 22 37 55 75 110 150 220 300 370 450 550
적 (KW) 0.1 0.2 0.4 0.75 1.5 2.2 3.7 5.5 7.5 11 15 22 30 37 45 55
출 (KVA) 0.3 0.5 0.8 1.3 2.4 3.2 5.3 7.5 10.3 15.2 20.2 29 42 51 61 71
정격출 전 (A) 0.8 1.3 2.5 3.6 7 9.3 16 22 27 42 53 77 104 133 159 190
최 출 전 (A) 2.8 5.7 11 14 21 27 45 60 60 90 120 180 270 270 360 360
최 생전 (A) 2 3 4 8 12 12 24 24 24 40 160 160 240 240 320 320
최 생저항 Ω 200 130 100 50 36 36 18 18 18 11 3 3 2 2 1.5 1.5
(kg) 2.5 2.5 2.5 2.5 4 4 8 10 12 12 20 25 40 40 55 55
전원전압・주 삼상・단상 200/220V AC 50/60Hz
제어 식 정현파 디지털 방식 벡터 제어(엔코더 사용)
사 조건
주 -10℃ ~ +40℃
상 90%이하결로가 없는 것
고 1000m이하
사 경 부식성 가스 분진이 없는 것
능
엔 200kpps 2 채널 라인드라이버 방식
시컨 *a12점(photo-coupler 절연, 전류형 5 mA)
시컨 *a8점(photo-coupler 절연, 오픈 수집가 출력 40 mA/점)
시컨 전원 DC24V (외부급전)
그 *a2채널(IN) 2채널(OUT) (DCO~5 V)
-3-

MSBH 타 (400V )
종
사 양
MSBH
01 02 04 08 15 22 37 55 75 110 150 220 300 370 450 550
적 (KW) 0.1 0.2 0.4 0.75 1.5 2.2 3.7 5.5 7.5 11 15 22 30 37 45 55
출 (KVA) 0.35 0.55 0.9 1.5 2.7 4 6.1 10 14 18 23 34 44 53 65 80
정격출 전 (A) 0.5 0.8 1.3 2.0 3.6 5.2 8 13 18 24 30 44 57 70 85 105
최 출 전 (A) 4.2 4.2 7 7 14 14 25 35 53 71 106 140 210 210 280 280
최 생전 (A) 8 8 8 8 14 14 25 35 40 60 80 120 120 210 280 280
최 생저항 Ω 100 100 100 100 58 58 32 23 20 14 10 6.7 6.7 3.8 2.9 2.9
(kg) 2.5 2.5 2.5 2.5 4 4 8 10 12 12 20 25 40 40 55 55
전원전압・주 삼상・단상 400/440V AC 50/60Hz
제어 식 정현파 디지털 방식 벡터 제어(엔코더 사용)
사 조건
주 -10℃ ~ +40℃
상 90%이하결로가 없는 것
고 1000m이하
사 경 부식성 가스 분진이 없는 것
능
엔 200kpps 2 채널 라인드라이버 방식
시컨 *a12점(photo-coupler 절연, 전류형 5 mA)
시컨 *a8점(photo-coupler 절연, 오픈 수집가 출력 40 mA/점)
시컨 전원 DC24V (외부급전)
그 *a2채널(IN) 2채널(OUT) (DCO~5 V)
-4-

종
사 양
MSBH
750 1100 1300 1600 2200
적 (KW) 75 110 130 160 220
출 (KVA) 108 160 190 229 305
정격출 전 (A) 142 210 250 300 400
최 출 전 (A) 420 630 630 700 700
최 생전 (A) 280 400 400 450 4504
최 생저항 Ω 2.5 1.75 1.75 1.6 1.6
(kg)
전원전압・주 삼상・단상 400/440V AC 50/60Hz
제어 식 정현파 디지털 방식 벡터 제어(엔코더 사용)
사 조건
주 -10℃ ~ +40℃
상 90%이하결로가 없는 것
고 1000m이하
사 경 부식성 가스 분진이 없는 것
능
엔 200kpps 2 채널 라인드라이버 방식
시컨 *a12점(photo-coupler 절연, 전류형 5 mA)
시컨 *a8점(photo-coupler 절연, 오픈 수집가 출력 40 mA/점)
시컨 전원 DC24V (외부급전)
그 *a2채널(IN) 2채널(OUT) (DCO~5 V)
-5-

4. DC 사양
DC 48V
종
사 양
MSBB
04 10 30 50
적 (KW) 0.4 1 3 5
출 (KVA) 3.3 3.3 6.7 8.5
정격출 전 (A) 8.5 21 62.5 104
최 출 전 (A) 100 100 200 250
최 생전 (A) - - - -
최 생저항 Ω - - - -
(kg) - - - -
전원전압・주 삼상・단상 400/440V AC 50/60Hz
제어 식 정현파 디지털 방식 벡터 제어(엔코더 사용)
사 조건
주 -10℃ ~ +40℃
상 90%이하결로가 없는 것
고 1000m이하
사 경 부식성 가스 분진이 없는 것
능
엔 200kpps 2 채널 라인드라이버 방식
시컨 *a12점(photo-coupler 절연, 전류형 5 mA)
시컨 *a8점(photo-coupler 절연, 오픈 수집가 출력 40 mA/점)
시컨 전원 DC24V (외부급전)
그 *a2채널(IN) 2채널(OUT) (DCO~5 V)
-6-

5. H/W
5-1 주 I/O
5-1-1 POWER I/O (AC) -[ MSB 01~08 ]-
CN1 – CPU 신 단 (U, V, W, /U, /V, /W, OC, Br, +5V, 0V)
(U,V,W,/U,/V,/W) – 동 PWM 신 출
OC – Controller에 과전 가 경 IPM 보 출
Br – Controller에 생 전압 생 생신 출 ( 생TR 동)
+5V,0V – CPU 보드 전원
CPU보드 BAES에 연결함
CN2 - +5V 전원 (+5V, 0V)
CPU보드 DSP에 연결함
* CPU보드 5VCOM단 가 연결 어 연결하 말 것 *
CN3 – 전 ( )신 전원 출 단
(+15V, COM, -15V) 전 전원
(U, V) 전 신 출 (AO)
CPU보드 HOLE에 연결함
CN4 - +15V, COM, -15V 전원
CN5 – DC-DC 컨 +/-15V +5V 출
+/-15V 는 CN4에 연결
CN6 – OV,SV출 단
OV – 볼트에 Controller 보
SV – 저 전압 시 Controller 보
CPU보드 SOV에 연결 (DC 에는 사 하 않 )
CN7 - P, N 전원
BP1 – P, N, Br(S0), W, V, U, T, S, R, E 출
E – 접 단
R, S, T – 삼상 또는 R,S에 단상전원 단
U, V, W – 삼상 연결단
S0(Br) – 생저항 연결단
P(+), N(-) – PN 단 에 DC 312V전원 연결 시 동 가능
R,S,T / P,N 에 같 전원 투 가능 .
-7-

5-1-2 POWER I/O (DC)
5-1-3 CPU I/O
2ch Encoder
1. BASE – DIP-IPM(IPM)에 PWM 신 보내어 동시 니다.
O.C 신 아 DIP-IPM(IPM) 보 합니다.
Br(S0)신 출 하여 OV신 시 생 저항 동시
DIP-IPM(IPM) 보 합니다.
2. SOV – 저전압, 고전압 식하여 DISPLAY에 ALM 시합니다.
3. FLASH – MPU에 OS, 프 그 ROM, 타 ROM 역에 저 시 사 니다.
4. SCI2 – RS232 니다.
5. K.DIS – KEY, DISPLAY 연결합니다.
6. DSP – K.DIS, ENCODER에 전원 공 하는 단 니다.(DC 5V)
7. 5VCOM – 것 쇼트 시키 DSP단 에 전원 공 하 안아 니다.
8. SCI1 – RS422 니다.
9. VCPWM –
10. ANALOG – 아날 그 INPUT(10BIT x 2) OUTPUT(8BIT x 2) 니다.
11. HOLE – 전 아날 그 신 는 단 니다.
12. POWER – DC 5V 공 하는 곳 니다.
13. ENC1 – 엔 신 는 단 니다.
14. ENC2 – 다 엔 신 는 단 니다.
15. CNC0 – TR 출 단 니다. OUTPUT (8BIT)
16. CNC4 – 포 커플러 단 니다. INPUT (8BIT)
17. CNC5 – 포 커플러 단 니다. INPUT (4BIT)
18. IOP – CNC0~CNC5 전원 단 니다. (DC 24V)
19. PFCPWM –
20. S0,S1 – RAM, ROM 프 그 역 정
S1 S0
OFF, OFF ROM 0
ON, OFF ROM 1
OFF, ON ROM 2
ON, ON RAM
-8-

CPU V3W080
-9-
19
18
17
16
15
14
13
12 11 10
9 8 7 6
4
1
5
3
2
20

5-1-4 I/O연결
1. POWER + 전원 + + 생저항
그 과 같 연결하여 주십시
2. POWER + CPU보드
CN1 – BASE 연결
CN2 – DSP 연결 (CPU 보드 5VCOM 쇼트 어 연결하 말 것)
CN3 – HOLE 연결
CN6 – SOV 연결
3. CPU + I/O(ENCODER, AIO, DIO등)
* DIO 사 시 IOP단 에 전원 공 하여 주십시 .
전원 공 하 않 경 동 하 안 니다.
출 신
출 신 는, photo-coupler 해 절연 하고 니다.
출 신 는, 픈 컬넥 사양( 미 COM) 고 니다.
(DI)
-10-
E R S T U V W S0 N P
IM 지단
3상200V
50/60Hz
생저항
3상
내 에 전 제한 저항 (3.3KΩ)가 접 고 니다.
, 트 등 접점 접 합니다.
I/O+24V
포 커 러
I/O GND
릴

출 (DO)( 픈 컬넥 미 COM) 최 출 전 40mA
엔 ( 시 )
AIO(아날 그 IN,OUT)
DC 5V 10BIT
DC 5V 8BIT 출
+5V
AI 1 VR(가 저항)
GND
AO 1 AI 단
AO 사 시 GND 공 연결하여 주십시 .
AIO 사 사 할 경 CPU가 니다.
-11-
조 접 합니다.
출 전 에 주 하여 연결해 주십시 .
극 는 연결시 극 에 주 해 주십시 .
또, 에 는, 다 드 사 해야 합니다.
제어 전 가 허 넘는 경 , 미니 등 사 하여 동 시 주 .
시 IC는 26C32A 사 했 니다.
드 twisted pair 사 합니다.
라 드라 라 리시
I/O+24V
트랜지
I/O GND
Ic 릴 등

5-2
ROM 3
ROM 2 ROM 3
ROM 1 ROM 2
OS. ROM 0 ROM 1
역 ROM 0
시
ROM 역
저 타 ROM 2 (0행~1023행)
ROM 역 ROM 1 (0행~1023행)
프 그 ROM 0 (0행~1023행)
ROM 역
시 타
RAM 역
저 타
RAM 역
프 그 (0행~412행)
RAM 역
-12-

6. S/W
6.1 시 타
드No. 내 정 초 정 정 (1) 정 (2)
0 1 st엔 정[PLS] 0~99999999 1000
1 2 nd엔 정[PLS2] 0~99999999 1000
2 Z상 시 정 0~99999999 1000
3 결정 [POS] 0~99999999 1000
4 결정 최고 주 [MAXHz] 1~12000 3000
5 결정 최저 주 [MINHz] 0~500 3
6 1000
7 크 트[VFB] 1~1000 200
8 가감 시간[SFT] 1~60000 1000
9 $1
10 RS422 포 정 $91
11 VFB 경 가감 (a×10/S) 1~6000 1000
12 결정시 감 료 전 1~6000 10
13 결정 제어 1~255 3
14 PSG 경 점(0.1 Hz단 ) 0~200 30
15 AS-IPM 드 0~2 $1
16 PWM 드 0~6 2
30 신 향 $3
31 정 적 경 Hz 10~10000 5000
32 가감 적 경 Hz 10~10000 4000
33 프 (offset) 적 시간(0.1 ms단 ) 10~1000 20
34 고 적 시간(0.1 ms단 ) 10~20000 30
35 가 적 시간(0.1 ms단 ) 10~20000 40
36 감 적 시간(0.1 ms단 ) 10~20000 50
37 전 (0.1 A단 ) 1~10000 100
38 엔 결상 최저 Hz(1 Hz단 ) 1~255 5
39 엔 역상 최저 Hz(1 Hz단 ) 1~255 100
40 엔 체크 시간(×65 ms)(0=NO CHECK) 1~50 10
60 여 전 프 (offset)(im) 5~40 30
61 비 게 P (/10) 1~120 80
62 적 게 I (×10%) 1~100 100
63 사 (1/100 Hz) 10~3000 1200
64 K2게 1~500 450
65 제 Hz 전 게 % 1~100 60
66 전 게 1~150 60
67 엔 타 시간 (0.1 ms단 ) 5~200 15
68 저 DOWN % 10~90 50
69 고 UP % 0~100 100
70 미끄럼 점 1~20000 5000
71 엔 타 보정 ((500000×극 )/ 엔 타CT) 400
72 S 곡 시간(0.1 ms단 ) 10~10000 15
73 최 (1/100 Hz) 1~6000 1500
74 적 시간 경 시간(0.1 ms단 ) 1~2000 20
75 적 시간 게 1~255 0
76 엔 미 최 ( 니 ) 0
77 드 트 1~250 100
-13-

78 트 크 50~1000 800
79 전 게 점 1~20000 5000
80 엔 2 게 ×a 1~10000 100
81 엔 2 게 /b 1~10000 100
90 시 4~0 시 내 적 $F004
91 시 9~5 시 내 전 $F00A
92 프 그 동 시 정 0 or 293 or 6413 $0
93 프 그 동 시 개시행 0~1023 0
94 (알 전=$8000)( 동시 PARASET=$4000) 0 $0
95 AD0·AD1 시간(0.1 ms단 )(0=사 안함) 10~10000 0
96 트 택 0~$8000 $0
97 시 드 정 0~6 0
-14-

6.2 MSCL 프 그 어
MSCL에는 고 언어 간 언어가 니다. 컴 러 해 사 할 는 고 언어 프 그 할
니다. 컴 러 하는 없 접 MS 보에 주고 싶 , 프 그 하고 싶 경 는 계 언
어 사 하 합니다.。
계어 어 능
C0 C0.(OUT 0) Out신 출 8bit출 신
C1 C1.(OUT 1) ″ ″
C2 C2.(OUT 2) ″ ″
C3 C3.(OUT 3) ″ ″
C4 C4.(IN 0) 신 8bit 신
C5 C5.(IN 1) ″ ″
C6 C6.(IN 2) ″ ″
C7 C7.(IN 3) ″
C8 C8 신 MS SERVO 같 종 신
C9 C9 신 MS SERVO 같 종 신
CA CA 10 시
CB PLS2 2nd엔 2nd엔 트 가 저 . (4Byte)
CC
CD
CE $ 1 트 HEX 1 트16 정
CF $ 2 트 HEX 2 트16 정
D0 = 행 에 경 NOP
D1 + 가산
D2 - 감산
D3 × 산
D4 ÷ 제산
D5 ( 프트L)×2n
프트 ×2 n 연산
D6 ( 프트R)/2n
프트 ÷2 n 연산
D7 AND 논 적 곱
D8 OR 논 적 합
D9 EOR 타적 논 합
DA NOT 전
DB ABS 절
DC PEEK 1 트 특정 1 트 .
DD POKE 1 트 특정 에 1 트
DE DPEEK 2 트 특정 2 트 .
DF DPOKE 2 트 특정 에 2 트
E0 HZS 주 출 하고 는 주 가 저
E1 HZP 정 주 출 주 .
E2 PLS 1st엔 1st엔 트 가 저 . (4Byte)
E3 POS 타 포 결정 정.
-15-

계어 어 능
E4 MAXHZ 결정 최 주 결정시 상한 주 정.
E5 MINHZ 결정 저 주 결정 저 시 감 .
E6 VFA 실 크 제어시 실 크 (READ ONLY)
주 비 전압 고 시 크 컨트
(VF 드[PWM:2]시 ) E7 VFB 크 트 제어시 크 상한
어 전압 저 시 크 컨트
(VF 드[PWM:2]시 )
E8 SFT 가감 정 주 에 가감 정
E9 PSG position gain 에 정.
EA TIC1 내 타 1 정 2.44msec 타 트
EB TIC2 내 타 2 정 2.44msec 타 트
EC HZF 검출 피드 주
ED PLSI Z상 시 Z상 시 정 에
EE KED 키 드 키 내 격납 。
EF SEVCC 워 트 =0 워ーOFF 、 =1 워ーON
F0 JSR 브루틴 점프 브루틴 실행
F1 JMP 무조건 점프 무조건 점프.
F2 JMI 조건 점프 결과가<0 점프.
F3 JEQ 조건 점프 결과가=0 점프。
F4 JPL 조건 점프 결과가≥0 점프。
F5 JNE 조건 점프 결과가≠0 점프
F6 BRA 상 점프 정 다 행보다 점프.
F7 CALL 계어 브루틴 계어 브루틴 실행.
F8 ONTIM1 브루틴 시 65msec 다 브루틴 실행 타 럽트
F9 ONTIM2 브루틴 시 가 시간 다 브루틴 실행 타 럽트
FA RTS 브루틴 루틴에 。
FB OFFRTS 루틴에 가 。
FC AOFRTS 전 루틴에 가 。
FD SCNO 시 얼 채널 시 얼 신 No. 정
FE
FF STOP 프 그
-16-
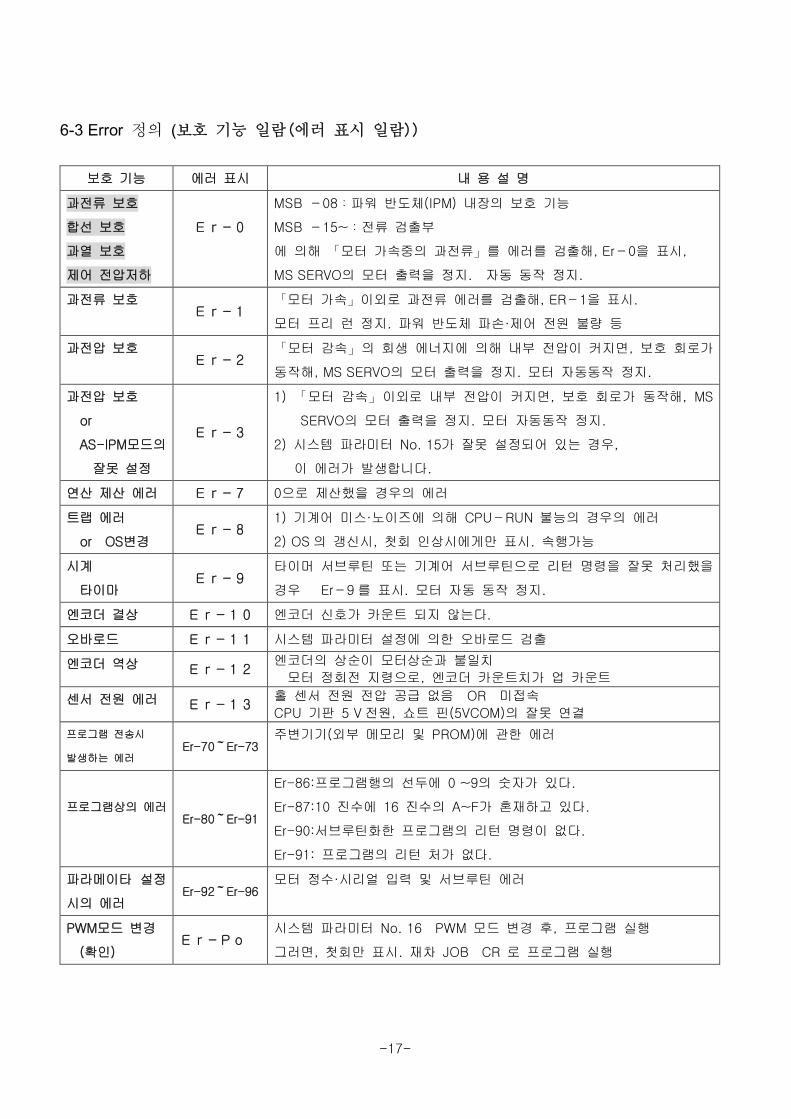
6-3 Error (보 능 람(에러 시 람))
보 능 에러 시 내
과전 보
합 보
과열 보
제어 전압저하
Er-0
MSB -08: 워 체(IPM) 내 보 능
MSB -15~:전 검출
에 해 「 가 과전 」 에러 검출해, Er-0 시,
MS SERVO 출 정 . 동 동 정 .
과전 보 Er-1
「 가 」 과전 에러 검출해, ER-1 시.
프 런 정 . 워 체 ·제어 전원 등
과전압 보 Er-2
「 감 」 생 에너 에 해 내 전압 커 , 보 가
동 해, MS SERVO 출 정 . 동동 정 .
과전압 보
or
AS-IPM 드
정
Er-3
1) 「 감 」 내 전압 커 , 보 가 동 해, MS
SERVO 출 정 . 동동 정 .
2) 시 미 No. 15가 정 어 는 경 ,
에러가 생합니다.
연산 제산 에러 Er-7 0 제산했 경 에러
트 에러
or OS 경 Er-8
1) 계어 미 ·노 에 해 CPU-RUN 능 경 에러
2) OS 갱신시, 첫 상시에게만 시. 행가능
시계
타 Er-9
타 브루틴 또는 계어 브루틴 처 했
경 Er-9 시. 동 동 정 .
엔 결상 Er-10 엔 신 가 트 않는다.
드 Er-11 시 미 정에 한 드 검출
엔 역상 Er-12 엔 상 상 과
정 전 , 엔 트 가 업 트
전원 에러 Er-13 전원 전압 공 없 OR 미접
CPU 5 V 전원, 쇼트 핀(5VCOM) 연결
프 그 전 시
생하는 에러 Er-70~Er-73
주 ( PROM)에 한 에러
프 그 상 에러
Er-80~Er-91
Er-86:프 그 행 에 0 ~9 가 다.
Er-87:10 에 16 A~F가 하고 다.
Er-90: 브루틴 한 프 그 없다.
Er-91: 프 그 처가 없다.
타 정
시 에러 Er-92~Er-96
정 ·시 얼 브루틴 에러
PWM 드 경
( ) Er-Po
시 미 No. 16 PWM 드 경 , 프 그 실행
그러 , 첫 만 시. 차 JOB CR 프 그 실행
-17-

7.주 사항
상 주
● , 운 , 보 · 검 에, 드시 뉴얼과 그 독 여
게 사 여 주십시 . 지식, 보 그리고 주 사 습득 여
사 주십시 。
뉴얼에 는, 주 사 랭크 「 험」 「주 」 어 습니다.
● 본 「 에 심볼 마크」
본 에 는 에 내 에 래 같 심볼 마크 사 고 습니다.
험 취 했 경 에는 험한 상 어날 어 사망 또는
상 가능 상정 는 경
주 취 했 경 에는 험한 상 어날 어 간 정 해나
경상 가능 는 경 물적 해만 생 생 는
경 여 주 에 한 사항에 , 상 에 는 한 결과에
결합 는 가능 니다.
한 내 하고 문에 드시 주 .
● 지, 강 그림 시 그 다 에 타냅니다.
는 것 타냅니다.
강제 드시 는 것 타냅니다.
들 지 경우는 니다.
본 뉴얼에 는, 「 험」, 「주 」에 당 지 지만, 사 가 지 주
사 는 곳에 고 습니다.
-18-
!
!
!!
1!
!
!

취
주
● 탈 그, 뉴얼에 재 경에 사 십시 .
고 , 다습, 지, 식 가 , 진동, 격 는 경에 사 감 , 재
동 원 니다.
체 , 래 같 경에 는 사 지 마시 .
· 직사 들어 는 , 주 도가 -10℃~40℃ 는
· 상 습도가 90% 는 , 습도 변 가 격 에, 결 가 는
· 식 가 가연 가 가 는
· MS-SERVO에 직 진동 격 지는
, , 등 러내리
● 뉴얼에 라 십시 .
착 미비 , 고 , 동 원 니다.
① 사 실 게 체결 여 주 .
MS SERVO 사, 단 고 사가 느 지지 게 실 게
체결 여 주십시 . 사가 느 지 ,
MS SERVO 여 , 동 키는 원 니다.
② 는 여 주십시 !
● 쓰 등 지 말 주 .
재, 고 , 동 원 니다.
-19-
!

● 지 단 (E: 찰에 )는 드시 지 실시 주 .
지 지 는 경우는, 감 , 동 우 가 습니다.
● MS SERVO 원 단 「E」단 2 mm2 상 지극( 3 지)에
주 . 동 , 지 공 지 마 .
● 격에 맞 원 주 .
격 원과 다 원 재 , 고 원 니다.
MS SERVO 시리 는, 2 원에 집니다.
원 사 랍니다. MSB 시리 는 AC200V±10% 니다.
● 업 , 가에게 맡겨주 .
못 재, 고 , 감 원 는 경우가 습니다.
● MS SERVO에 는 각 컨 는, 실 주 .
MS SERVO 동 원 니다。
원 책 마 주 .
● 원에 가 는 경우에는, 공 원 라 에 연 트랜 또는,
어 책 주 .
MS SERVO 주변 동 지 가 습니다.
책 , 동 원 니다.
게 주 .
●MS SERVO 는 ( ) , 래 사 고 주 .
계 강도, · 거리, 신 , 등
는, 어 에 어, 동 과 리 주 .
게 가 습니다.
리가 지 동 원 니다.
● MS SERVO 엔 , twisted pair 사 주 .
게 여 동 지 가 습니다.
지 블 사 에 라 동 원 니다.
-20-
!
!
강제
주

사 상 주
험
● 원 에 단 에 만지지 마시 .
감 우 가 습니다.
● 비상 지, interlock 등 MS SERVO 에 주 .
MS SERVO 동 고 에 , 계 는 경우가 습니다。
MS SERVO 에 책 !
■MS SERVO에 고 생 , 에 는 사고 또는 비
우 가 는 경우는 MS SERVO 에 interlock 만들어 주 .
( ) 주 차체 지탱 는 역 (크 등 )에 는 경우
■MS SERVO가 고 났 경우, 가 리 런 어, 차체 지탱 는 림 건 가 어
습니다. 그 결과, 과 계 는 사고 또는, 비 우 가 습니다. 본
에 계식 브 크 착 여 MS SERVO 그램(MSCL) interlock 만듭니다.
또 동시에, 에 릴 달 똑같 interlock 만들어 주 .
■ 신 시 생각 여 업 주 .
동 에 , 에 는 사고 또는, 비 우 가 습니다。
주
● RUN, STOP, 운 그램 변경등 주 주 .
미 에 , 계 사고가 는 경우가 습니다.
● 원 에 라, 원 주 .
동 에 , 계 사고가 는 경우가 습니다.
● MS SERVO 에는, 보 내 고 습니다.
● 에 도 보 주 .
● 에 냉각 주 .
열에 상 키거 상· 재가 는 경우가 습니다.
연 사 는 경우, 연 격에
사 주 .
또, 사 에 여 냉각 가 습니다.
● 운 직후 MS SERVO 본체 지 말 주 .
열 고 는 경우가 어, 상 우 가 습니다.
!
!

운 에 주 는 키
● MSCL 라미 · 라미 변경 , 지 말 주 .
동 에 , 사고가 는 경우가 습니다.
● MSCL 라미 · 라미 , 라미 내 · 지 여 주 .
● MSCL 라미 No. 71(엔 보 ) , 후 변경 지 마 . 동 에 ,
사고가 는 경우가 습니다. MSCL 라미 No. 71(엔 보 ) , 극 엔
에 니다. 별지 MSB 타 라 타편
참 주십시 .
보
험
● 원 못 , 쇼트, MS SERVO 본체 , 가열, 에 지 마 . 열,
우 가 습니다.
● MS SERVO 본체 , 개 지 마 .
재, 고 , 동 원 니다.
주
● MS SERVO 착, 는, 원 차단(OFF) , 5 상 지 것 고 업
십시 . 감 , 동 , 고 원 니다.
※ MS SERVO 단 P-N간 DC400V 상 는 계 비
주 .
원 차단 직후 P-N간 , DC200~DC400V 니다.
-21-
!
!

MS-SERVO 사 에, 편 생겼 경우는, 시 운 어 체크 주 .
원 시에
MS-SERVO가
움직 지 는다.
( 시 없다)
(CPU가 RUN 지 는다)
운
없다.
가 지 다.
Q. 게 원 연결 고
습니 ?
Q. CPU 빨강 LED가 등
고 습니 ?
Q. 사 그 그램
어 습니 .
Q. DIS/KEY 연결 어
습니 .
Q. 에 상 없습니 .
(interlock 등)
Q. 어 습니 .
Q. 브 크 고
습니 .
Q. 계가 락 고 지 습니 .
Q. 동 에 지 습니 .
(interlock)
Q. 신 는 상 니 .
Q. MS-SERVO 보 가
지 습니 .
Q. 시동 크가 지 습니 .
Q. 라 드라 식 엔
고 습니 .
Q. 런등 어 고 지
습니 .
Q. 시 크가 지
습니 .
Q. 어시, 엔
상 니 .
Q. 다.
A. 원 다.
A. 원 상.
A. CPU 드 상.
A. 그램 다.
A. 연결 는다.
A. 체크.
A. 체크.
A. 브 크 개 다.
A. I/O 체크.
A. 락 개 다.
A. 에 돌린다.
A. 체크
A. 보 원 찾 내고 책 다.
A. 라미 에 크
린다.
A. 엔 다.
A. 동 재검 다.
A. 크 다.
A. 엔 체크
A. 재복귀
-22-
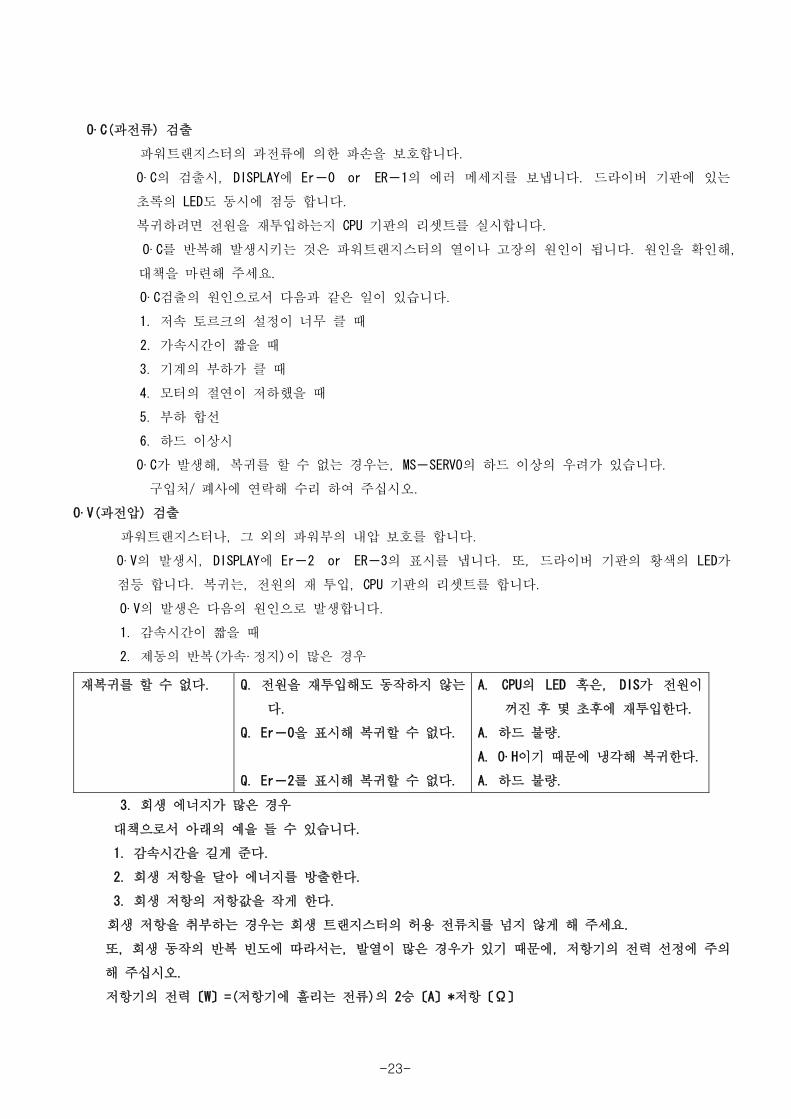
O·C(과 ) 검
워트랜지 과 에 보 니다.
O·C 검 시, DISPLAY에 Er-0 or ER-1 에러 지 보냅니다. 드라 에 는
LED도 동시에 등 니다.
복귀 원 재 는지 CPU 리 트 실시 니다.
O·C 복 생시키는 것 워트랜지 열 고 원 니다. 원 ,
책 마 주 .
O·C검 원 다 과 같 습니다.
1. 크 클
2. 가 시간 짧
3. 계 가 클
4. 연
5.
6. 드 상시
O·C가 생 , 복귀 없는 경우는, MS-SERVO 드 상 우 가 습니다.
처/ 폐사에 연락 리 여 주십시 .
O·V(과 ) 검
워트랜지 , 그 워 내 보 니다.
O·V 생시, DISPLAY에 Er-2 or ER-3 시 냅니다. 또, 드라 색 LED가
등 니다. 복귀는, 원 재 , CPU 리 트 니다.
O·V 생 다 원 생 니다.
1. 감 시간 짧
2. 동 복(가 · 지) 많 경우
3. 생 에 지가 많 경우
책 래 들 습니다.
1. 감 시간 게 다.
2. 생 달 에 지 다.
3. 생 값 게 다.
생 취 는 경우는 생 트랜지 허 지 게 주 .
또, 생 동 복 빈도에 라 는, 열 많 경우가 에, 에 주
주십시 .
〔W〕=( 에 리는 ) 2승〔A〕* 〔Ω〕
-23-
재복귀 없다.
Q. 원 재 도 동 지 는
다.
Q. Er-0 시 복귀 없다.
Q. Er-2 시 복귀 없다.
A. CPU LED , DIS가 원
꺼진 후 후에 재 다.
A. 드 량.
A. O·H 에 냉각 복귀 다.
A. 드 량.

보 · 검
보 · 검
MS-SERVO는, IC, , , 트랜지 등 시 많 에 어 습니다.
러 , 것 니고, 상 사 에 도 매 변 여 고 원 는 습니다.
보 · 검 상 징 견 열 내 지 꾸는 등 고 미리 막 가
습니다.
간단 검 사 , 8-1 에 타냅니다.
폐사에 는 든 MS-SERVO에 님 청에 리 실시 고 에 상담 주십시 .
8-1 보 · 검
검 개
검
검 사
주 경
원
주 도·습도· 진·가 · 미 트 등
주
결 과열 없는가
각 에 과열에 변색 는가
내 청
블 내 ( ) 등에 곡 그러짐 없는가
블 복·V ·열 ·변색 같 건 없는가
단 상, 사 상태
누 · 상태· 변 ( 5 )
택
릴 ·타
동 상태· 사 림·타 시간 · 상
연 복 ·변색 단 ·단
어
I/O·엔 등 동
키보드 시 키보드 동 ·
시 상태·얼룩
린트 · ·변색· ·탈락 없는가
에 가 림
연결 ·리드 가 림
질· 미 트 등 착
CPU 리 리 지:통상 3.0~3.3 V(2.8 V 경우 · 5 )
닉 드 지:통상 3.6~4.0 V(3.4 V 경우 · 5 )
냉각 계통 · 열 , 상 ,진동, 지 청
통상 2~4 에
-24-

트러블 과 지책
사 경에 라 는, MS-SERVO가, 동 고 키는 어
그 원 거 지 책 마 가 습니다.
A. : 주 에 원 , 원 라 통 가 ,
동 주는 습니다. 책 는, 다 과 같 것 습니다.
a.릴 · 택 ·· 어 에 지 킬러 다 드 어 개폐 지 억 다.
b. 신 ·· 짧게 , 동 과는 리 니다. 드(shield) 등 지 는 경우는, 그 블
사 니다. (엔 ·통신 등)
c. 지·· 드시 지 니다 . 다 동 과는 다 지극 마 는 것 람직 니다
d. 원·· 원 라 에 달 지 니다.
B. 경 : MS-SERVO는 , 경에도 주 가 니다.
a.진동·· 에 계 트 주므 , 진동 고 등 진 책 니다.
b. 식 가 · 진·· 식 량 키므 , 진 책 , 폐식 어 등 니다.
c. 도·· 신뢰 에 크게 주어, 특 도체 , 연결 니다.
C.라 : MS-SERVO는, 고 에, 지극 주 생 ,
라 등에 주는 습니다. 사 원 라 도에 ,
다 과 같 책 습니다.
a. 동 과 라 등 리 , 원 계통 눕니다.
b. MS-SERVO 철 에 들어갈 경우 그 상 에 지 지 습니다.
c. 동 , 지 니다.
d. MS-SERVO 차 에 삽 니다.
※ 에 는, 폐사에 상담 주십시 .
D. 연 : 에는 에 연 키는
습니다. 검 , 연 진단 실시 , 연 견 주 . 연
는, 드시, 체 주 .
MS-SERVO 채 고 , 원 니다.
상 료가 실 경우 당사에 연락 주시 보내드리도 겠습니다.
-25-
Related Documents











