Motion Capture Laboratory Viktor Devecseri

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Motion CaptureLaboratoryViktor Devecseri

Introduction• Sampling the pose and location of a subject over time.
• Optical motion capture
Markers
Multiple cameras
3D position reconstruction ofmarkers
Rigid body orskeleton information

3D Reconstruction
u2
v2w2
u1
v1
w1
[X,Y,Z]
P1
P2
t1
t2

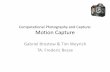
Camera frustum
Camera frustum

Camera frustum

Camera placementoptimization

System overview
Marker extraction
Reconstruction
User Interface
Calibration

Marker extraction – Cameras
Markers Cameras Pixels Image processingMarker
positions
• Web cameras
640x480 @ 30 FPS
• PlayStation 3 Eye
640x480 @ 60FPS
• uEye cameras
Industrial camera
1024x768 @ 30FPS
• Basler cameras
Industrial camera
658x492 @ 120 FPS
• On the GPU
CUDA
1-2 ms processing
• Realtime processingat 120 FPS
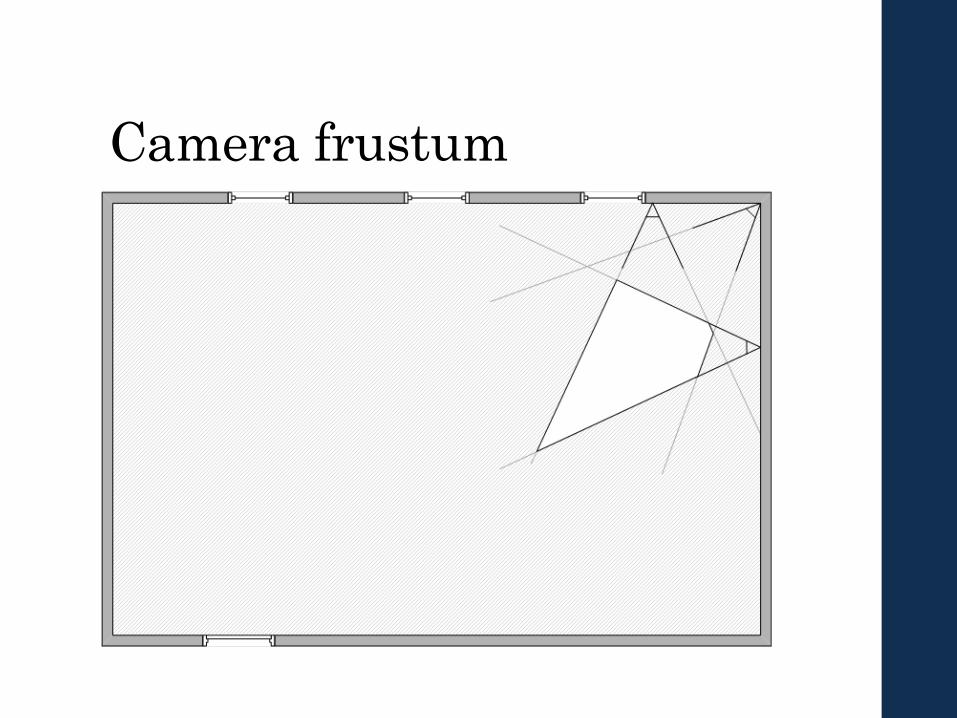
Marker extraction –Distributed
Image
Processing
Image
Processing
Image
Processing
3D reconstruction

Marker extraction –OptiTrack
Markers 18 x OptiTrack Flex 13Marker
positions
• 1280x1024 @ 120 FPS
• IR Leds, passive markers
• On-camera image processing
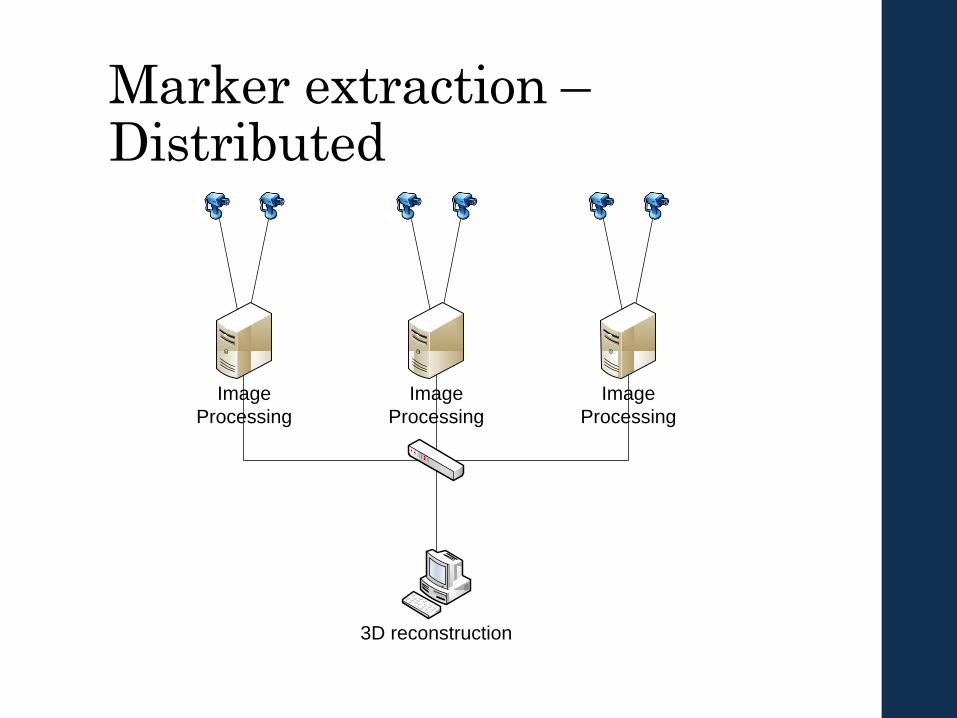
Reconstruction• Point correspondence
Matching points on different camera views
Epi-polar geometry
• Marker position reconstruction
• Model fitting
Rigid body
Skeleton

Calibration• Camera parameters
Intrinsic parameters (focal length, principal point, distortion)
Extrinsic parameters (position, orientation)
• Two steps
Starting estimation for each camera
Built-in methods in OpenCV for both intrinsic and extrinsic
Bundle adjustment for whole camera system
Wanding
Levenberg-Marquard algorithm
• Average error: 0.233cm

Rigid body
n
i
ii qdRp1
2min
Reference points Current points

Skeleton

User interface

Future work• Automatic marker labeling for skeleton
• Robust handling of missing and reappearing markers
• Skeleton calibrationshoulder
elbow
wrist
Conclusions• Different types of cameras
GPU based real-time image processing at 120 FPS
Scalable
OptiTrack cameras
• Modular design, easy extension
• Good calibration <0.5 cm accuracy
• Improving skeleton tracking

Thank you!Questions?

EEA Financial
Mechanism 2009-2014 -
HU08 Scholarship
Program
BUTE, Department of
Mechatronics, Optics and
Mechanical Engineering
Informatics
Narvik University College
Energy Agency Public
Nonprofit Ltd.
COLLECTIVE DEVELOPMENT OF MODERN EDUCATIONAL METHODOLOGIES IN THE
FIELD OF ONLINE MEASUREMENT, -CONTROL AND REMOTE MONITORING SYSTEMS
Related Documents