MOPITT Measurements of MOPITT Measurements of Tropospheric CO: Tropospheric CO: Assimilation and Inverse Assimilation and Inverse Modeling Modeling presented by Boris Khattatov Gabrielle Pétron, Jean-Francois Lamarque, Valery Yudin, David Edwards, and John Gille, National Center for Atmospheric Research, Boulder Claire Granier and Lori Bruhwiler, Service d'Aeronomie/NOAA MOZART Team: G. Brasseur, M. Schultz, L. Horowitz, D. Kinnison, L. Emmons, S. Waters, P. Rasch, X. X. Tie, C. Granier, D. Hauglustaine, and others US MOPITT Team: J. Gille, D. Edwards, C. Cavanaugh, J. Chen, M. Deeter, D.G. Francis, B. Khattatov, J-F Lamarque, L. Lyjak, D. Pacman, M. Smith, J. Warner, V. Yudin, D. Ziskin, and others CA MOPITT Team: J. Drummond, G. Bailak, P. Chen, J. Kaminski, N. Mak, G. Mand, E. McKernan, R. Menard, B. Quine, B. Tolton, Z. Yu, L. Yurganov, J-S Zou, and others

MOPITT Measurements of Tropospheric CO: Assimilation and Inverse Modeling MOPITT Measurements of Tropospheric CO: Assimilation and Inverse Modeling presented.
Jan 02, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
MOPITT Measurements of MOPITT Measurements of Tropospheric CO: Assimilation and Tropospheric CO: Assimilation and
Inverse Modeling Inverse Modeling presented by Boris Khattatov
Gabrielle Pétron, Jean-Francois Lamarque, Valery Yudin, David Edwards, and John Gille, National Center for Atmospheric Research, BoulderClaire Granier and Lori Bruhwiler, Service d'Aeronomie/NOAA
MOZART Team: G. Brasseur, M. Schultz, L. Horowitz, D. Kinnison, L. Emmons, S. Waters, P. Rasch, X. X. Tie, C. Granier, D. Hauglustaine, and others
US MOPITT Team: J. Gille, D. Edwards, C. Cavanaugh, J. Chen, M. Deeter, D.G. Francis, B. Khattatov, J-F Lamarque, L. Lyjak, D. Pacman, M. Smith, J. Warner, V. Yudin, D. Ziskin, and others
CA MOPITT Team: J. Drummond, G. Bailak, P. Chen, J. Kaminski, N. Mak, G. Mand, E. McKernan, R. Menard, B. Quine, B. Tolton, Z. Yu, L. Yurganov, J-S Zou, and others

! INPUTS: TYPE(ProfileType), INTENT(IN) :: Profile REAL(std) , INTENT(IN) :: NoData!! OUTPUTS: REAL(std), DIMENSION(:,:), INTENT(OUT) :: O!! LOCALS: INTEGER :: i,j,k! O(:,:) = 0.0 k=0 DO i=1,Profile_N_Lev-1 DO j=i+1,Profile_N_Lev k = k + 1 IF (k > SIZE(Profile%offDiag)) THEN CALL ABORT() ENDIF O(i,j) = Profile%offDiag(k) O(j,i) = Profile%offDiag(k) ENDDO ENDDO DO i=1,Profile_N_Lev O(i,i) = Profile%sigmaV(i)**2 ENDDO
[]TT122222()() = (-)exp()exp()22()()()affffafhzijijhziiiiirrbbbLLbttbtrxtt−=+−=+ΔΔ=− −⋅+Δ=+ Δ⋅⋅xxKyHxKBHHBHOBIKHB
IntroductionIntroductionThe goal of this research project is to study global distributions and derive poorly known surface sources of CO from MOPITT data.
This is done via assimilation of MOPITT data and inverse modeling of CO emissions in the MOZART 2 model.

Data AssimilationData Assimilation
Mathematical basis of data assimilation is estimation or inverse problem theory:
“People were naked worms; yet they had an internal model of the world. In the course of time this model has been updated many times, following the development of new experimental possibilities or their intellect. Sometimes the updating has been qualitative, sometimes it has been quantitative. Inverse problem theory describes rules human beings should use for quantitative updating”
Albert Tarantola, Inverse Problem Theory
Norbert Weiner
Andrey Kolmogorov
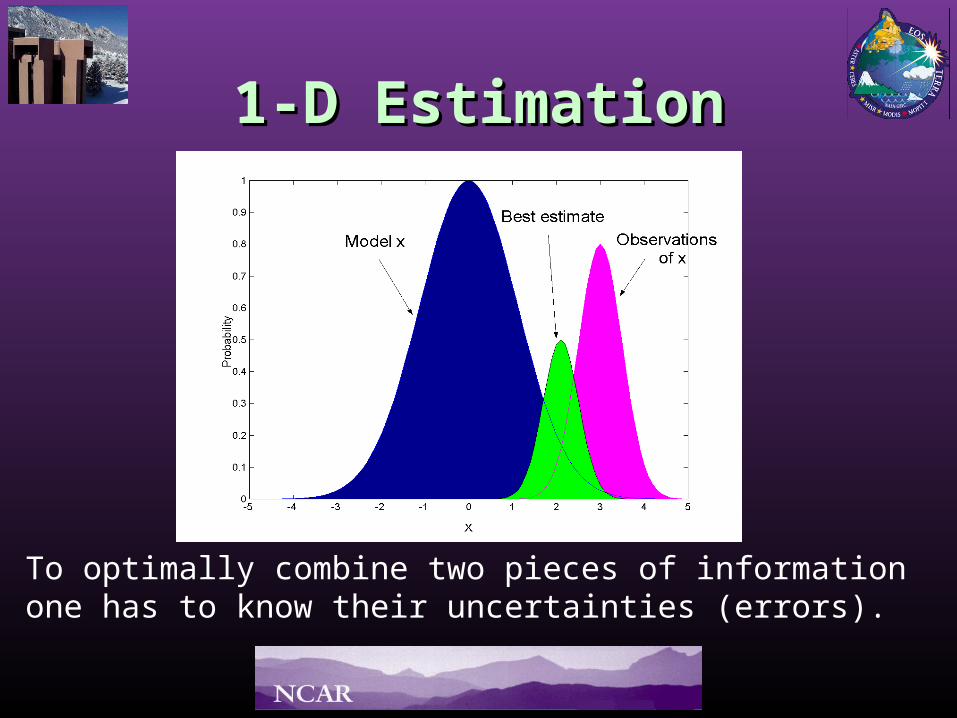
1-D Estimation1-D Estimation
To optimally combine two pieces of information one has to know their uncertainties (errors).
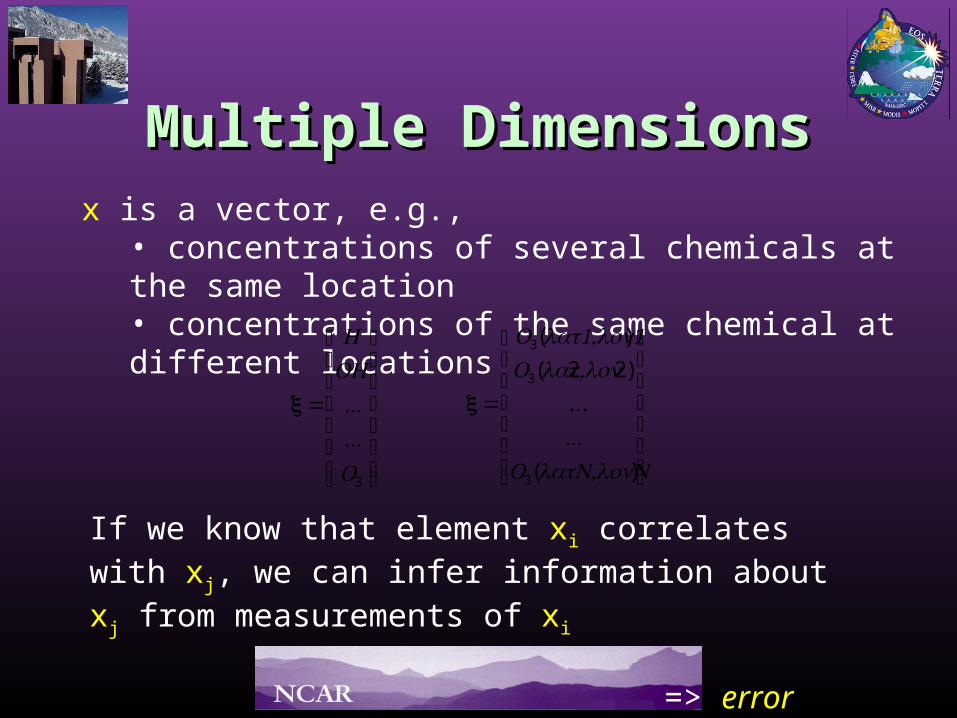
Multiple DimensionsMultiple Dimensionsx is a vector, e.g.,
• concentrations of several chemicals at the same location• concentrations of the same chemical at different locations
3⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
O......
OHH
x
)(
..
)22(
)(
3
3
3
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
,latN lonNO....,lonlatO1, 1lat lonO
x
If we know that element xi correlates with xj, we can infer information about xj from measurements of xi => error covariance matrices

Dynamic estimationDynamic estimation
Let’s assume we have a time dependent predictive model M: x(t+Dt) = M[ x(t) ]
The model tries to predict quantity x, which can be a scalar or a vector. Model simulations have uncertainty sx associated with them
Let’s also assume that there exist independent observations of quantity y, which is related to x via: y = H[ x ]
The uncertainty of measurements of y is sy

The problemThe problem
Model:
Observations:
Observational operator:
Problem: find the “best” x, which inverts
for a given y allowing for observation errors and other prior information
y = M(x)
z
z = H(y)
z = H(M(x))
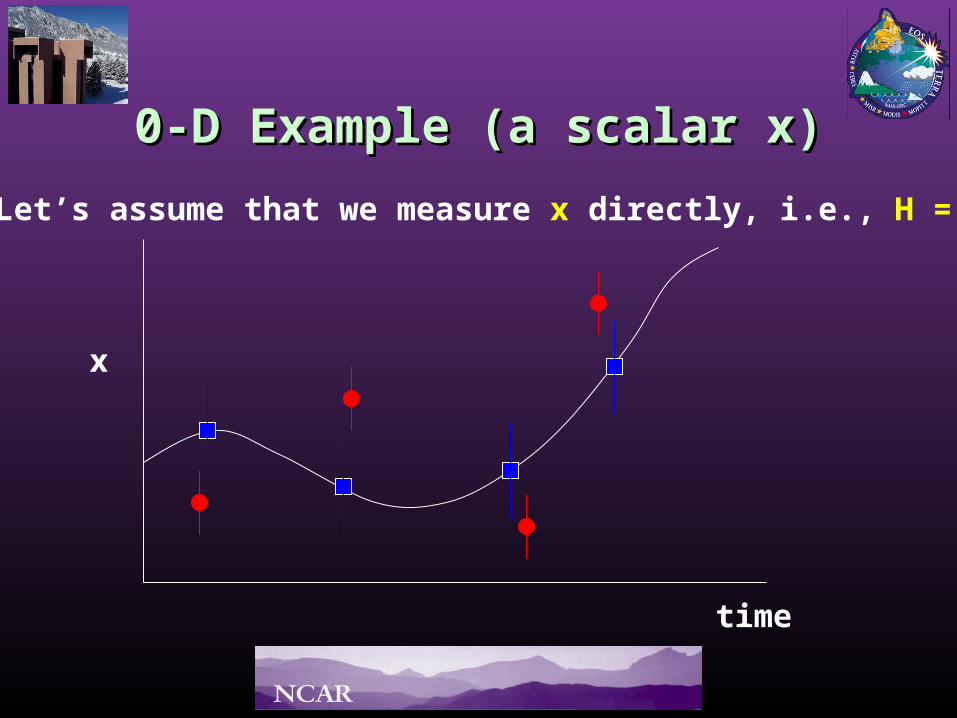
0-D Example (a scalar x)0-D Example (a scalar x)
time
x
Let’s assume that we measure x directly, i.e., H = I

0-D Example (a scalar x)0-D Example (a scalar x)
time
x

0-D Example (a scalar x)0-D Example (a scalar x)
time
x
If we use optimal estimates of x as initial conditions for model integration we can improve model predictive skills. To do this systematically we need to be able to computethe time evolution of errors in the model
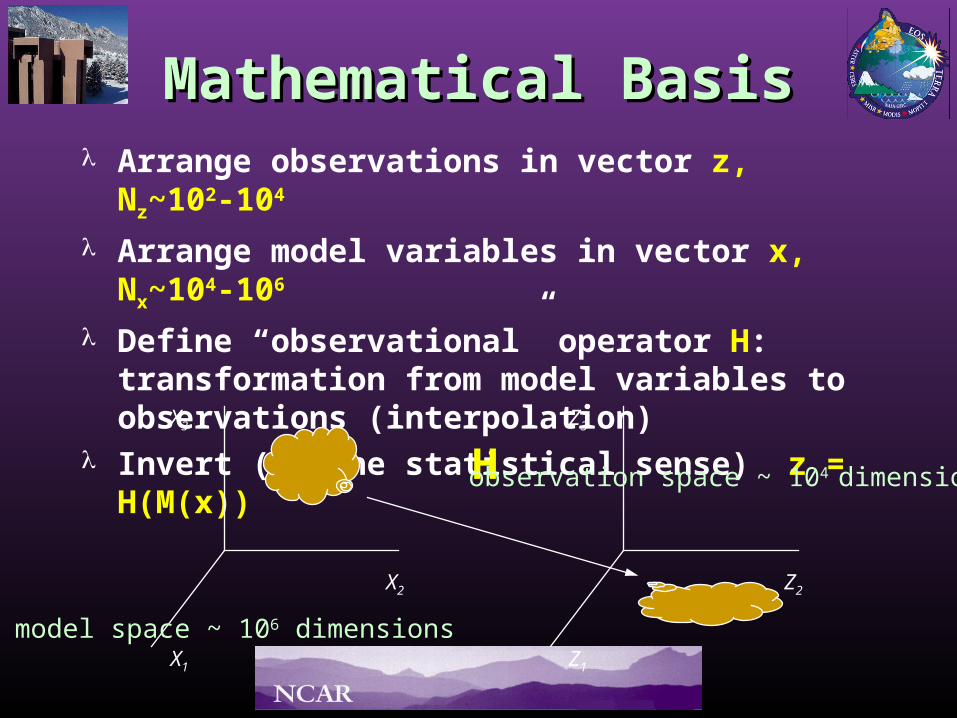
Mathematical BasisMathematical Basis Arrange observations in vector z, Nz~102-104
Arrange model variables in vector x, Nx~104-106
Define “observational” operator H: transformation from model variables to observations (interpolation)
Invert (in the statistical sense) z = H(M(x))
X3
X1
X2
Z3
Z1
Z2
H
model space ~ 106 dimensions
observation space ~ 104 dimensions

The problemThe problem
Formally, find x that minimizes
B and O are the forecast and observational error covariances
J(x) = [z -H(M(x))]TO-1[z-H(M(x))] + [x - xa]TBa-1[x-xa]

Evolution of the PDF is governed by a differential equation (Fokker-Kolmogorov) which is impossible to solve in most
practical cases
Therefore, simplifications are necessary

ApproximationsApproximations
• PDFs are Gaussian:
B is the covariance matrix
PDF(x) ~ e-0.5(x-<x>)TB-1(x-<x>)
B = <(x-<x>)(x-<x>)T>

ApproximationsApproximations
.
Model can be linearized for small perturbations:
L is the linearization matrix
H(M[x(t) +x(t)]) ≈ H(M[x(t)]) + Lx(t)
L = dx(t + t)=
dx(t) dxdH(M(x))

LinearizationLinearization
For photochemically active gases, like CO, the relationship y=H(x) between x and y is non-linear
In order to solve the problem one needs to linearize the model and use iterative techniques for finding the solution
We assume that the model can be linearized with respect to the emissions for small perturbations:
H[x +x] ≈ H[x] + Lx
L = dy(t + t)=
dx(t) dxdH

LinearizationLinearization
So, H can be approximated using the linearization matrix. L can be obtained
1. Using finite differences -- by running the model N times (where N is the number of emission sources), once for each source while all but one source are set to zero., i.e., L~ Dy/Dx
2. By differentiating the computer code of the model, i.e., developing computer code that calculates matrix L for given x and y
LinearizationLinearization
1. Linearization via finite differences (L~ Dy/Dx):
Pros: straightforward to construct, easy to change models
Cons: takes a lot of CPU time
2. Linearization by differentiating the computer code of the model:
Pros: Small CPU requirements
Cons: complicated to construct, hard to switch models
The SolutionThe Solution
x = xa + K(z - H(M(xa)))
K = BaLT(L BaLT + O) -1
B = Ba - BaLT(L BaLT + O) -1LBa
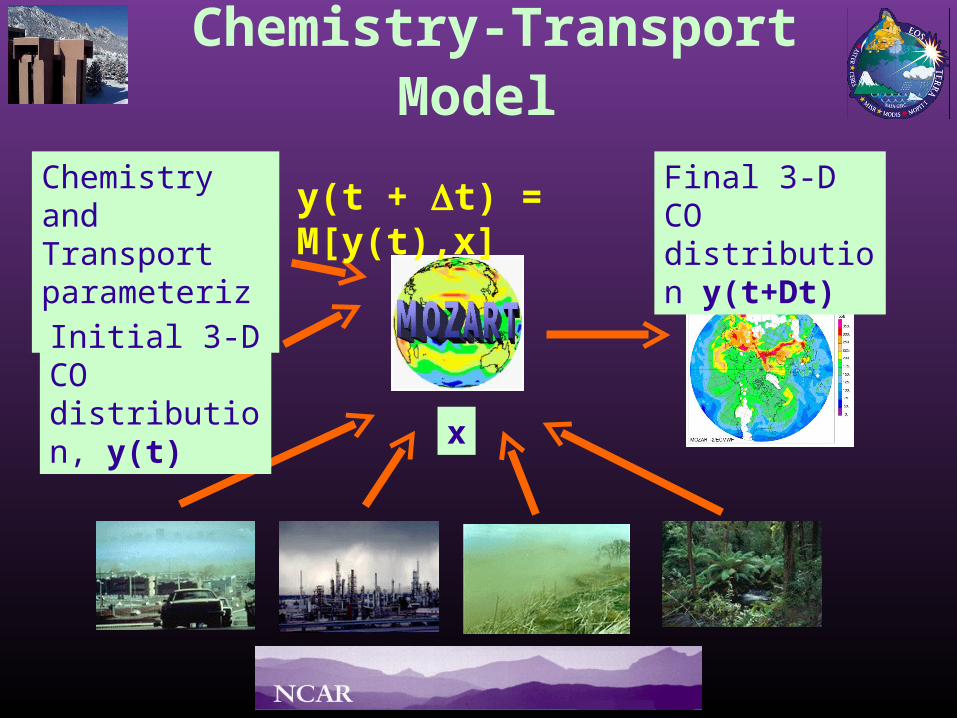
Chemistry-Transport Model
Chemistry and Transport parameterizations
Initial 3-D CO distribution, y(t)
Final 3-D CO distribution y(t+Dt)
x
y(t + t) = M[y(t),x]
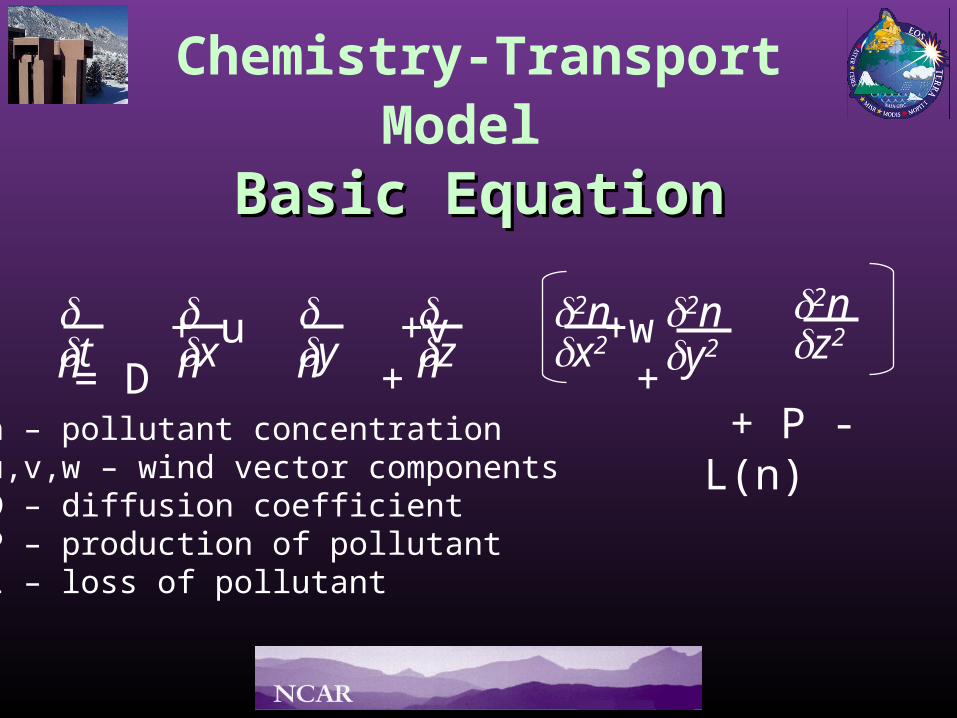
Chemistry-Transport Model Basic EquationBasic Equation
n – pollutant concentrationu,v,w – wind vector componentsD – diffusion coefficientP – production of pollutantL – loss of pollutant
+ u +v +w = D + +nt
ny
nz
nx
2nx2
2ny2
2nz2
+ P - L(n)
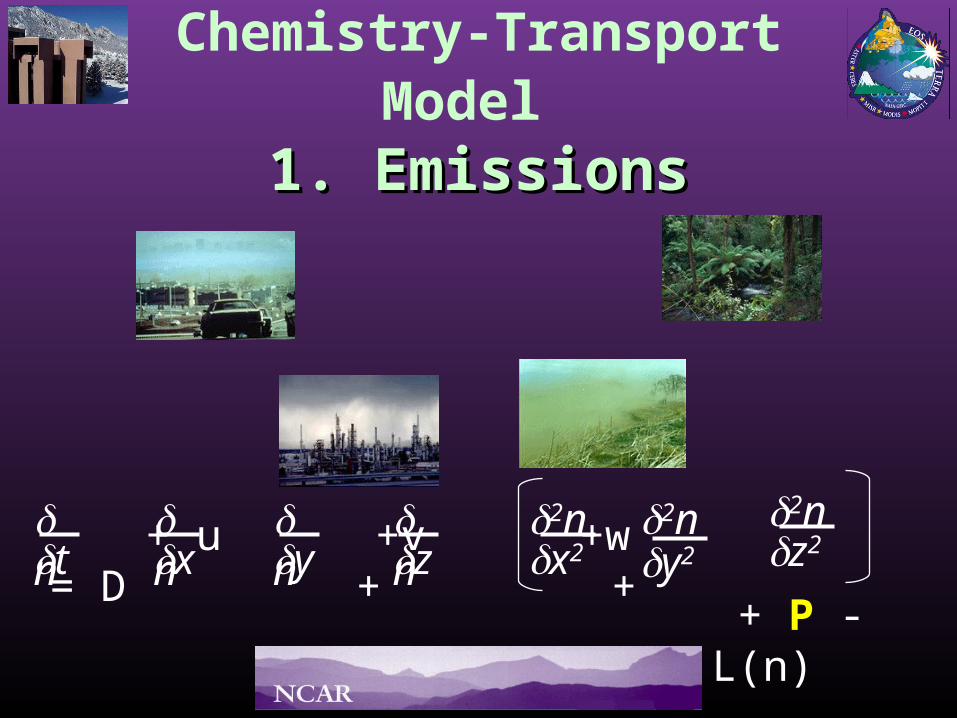
Chemistry-Transport Model 1. Emissions1. Emissions
+ u +v +w = D + +nt
ny
nz
nx
2nx2
2ny2
2nz2
+ P - L(n)

Chemistry-Transport Model 2. Advection2. Advection
+u +v +w = D + +nt
nx
2nx2
2ny2
2nz2
+ P - L(n)
ny
nz
QuickTime™ and aVideo decompressorare needed to see this picture.

Chemistry-Transport Model 3. Convection3. Convection
+u +v +w = D + +nt
nx
2nx2
2ny2
2nz2
+ P - L(n)
ny
nz
QuickTime™ and aVideo decompressorare needed to see this picture.

Chemistry-Transport Model 4. (Turbulent) Diffusion4. (Turbulent) Diffusion
+u +v +w = D + +nt
2nx2
+ P - L(n)
2ny2
2nz2
nx
ny
nz
QuickTime™ and aVideo decompressorare needed to see this picture.
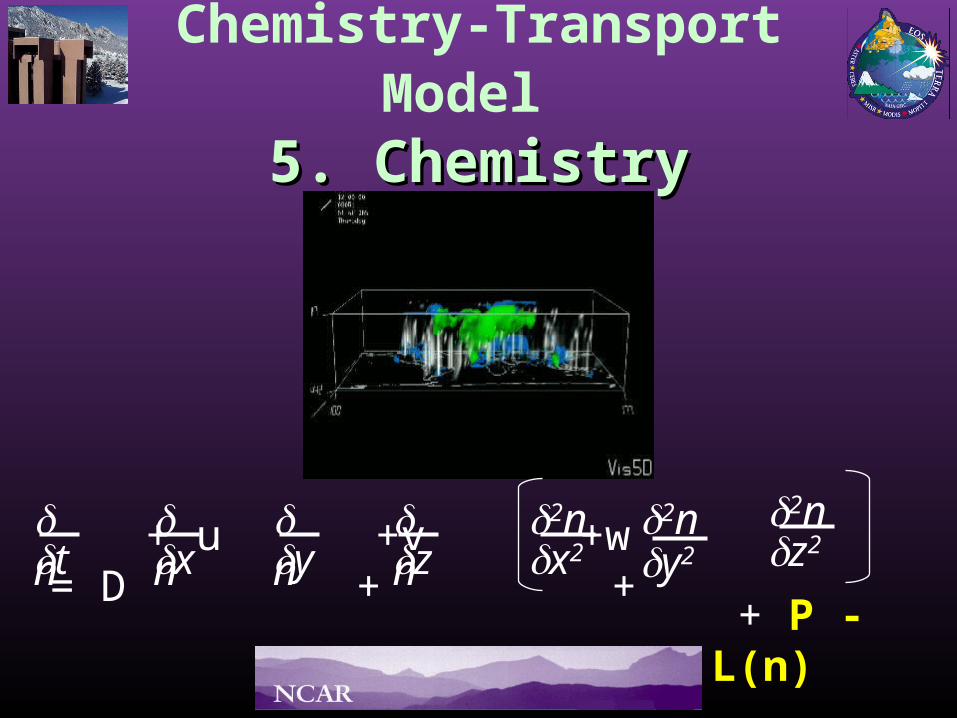
Chemistry-Transport Model 5. Chemistry5. Chemistry
+ u +v +w = D + +nt
ny
nz
nx
2nx2
2ny2
2nz2
+ P - L(n)
MOZART2 ModelMOZART2 Model
• 3-D global CTM MOZART 2
• 5° longitude by 5° latitude (T21) and higher (T42, T63)
• 28-60 levels
• Tropospheric chemistry, ~50 species
• ECMWF or NCEP dynamics
• Developed at NCAR and then at Max Plank
MOPITT MissionMOPITT Mission
The Measurement Of Pollution In The Troposphere mission is a joint CSA and NASA project. U. of Toronto leads the Canadian effort to contribute the instrument. NCAR leads the US effort do develop and apply data processing algorithms and provide science support
During the 5 year mission, MOPITT will provide the first long term, global measurements of carbon monoxide (CO) & methane (CH4) levels in the troposphere.

MOPITT MissionMOPITT Mission
The field-of-view of MOPITT is 22 x 22km and it views four fields simultaneously. The field of view is also continuously scanned through a swath about 600 km wide as the instrument moves along the orbit.
This Study Used This Study Used Preliminary MOPITT DataPreliminary MOPITT Data
The MOPITT instrument and the measurement technique are unique: lessons are being learned for the first time in both instrument operation and data processing
The US and Canadian MOPITT Teams work very hard on identifying and removing potential problems in the retrieved CO data and recently succeeded in delivering first data to NASA
The released data (internal version V4.6.2) is considered beta; individual profiles might contain noise that needs to be understood better
This study used V4.3.1 – all data were binned in 5x5 degree bins

Instantaneous Isosurface of CO, Instantaneous Isosurface of CO, MOZART 2MOZART 2

MOPITT DataMOPITT Data

Assimilation of MOPITT COAssimilation of MOPITT CO
Analysis Model

Instantaneous Isosurface of CO,Instantaneous Isosurface of CO, MOPITT Assimilation MOPITT Assimilation
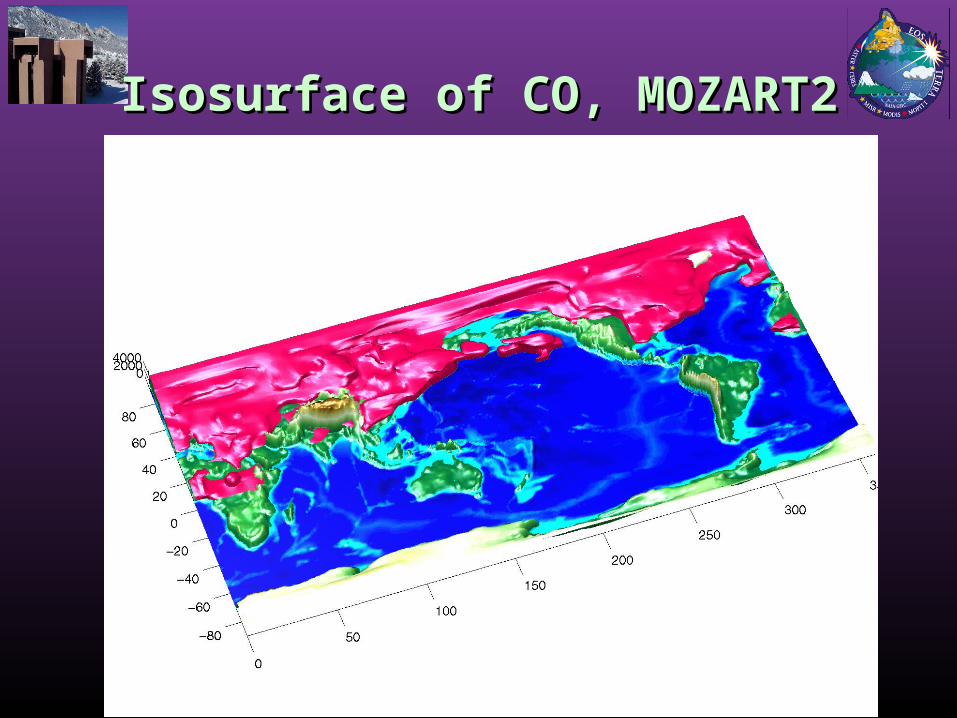
Isosurface of CO, MOZART2Isosurface of CO, MOZART2

CO, March-December 2000CO, March-December 2000

Inverse ModelingInverse Modeling
The discrepancies between observations and model results can be used to optimize poorly known parameters in the model – e.g., surface emissions.
yo ymMOPITT MOZART

March 2000 : Total column of COMarch 2000 : Total column of CO MOZART2 (top) and MOPITT (bottom) MOZART2 (top) and MOPITT (bottom)
MAR MOZART2, CO-column, scale=1.e17
-100 0 100-60
-40
-20
0
20
40
60
Lati
tud
e
MAR MOPITT, CO-column, scale=1.e17
-100 0 100 Longitude
-60
-40
-20
0
20
40
60
Lati
tud
e

July 2000: Total column of COJuly 2000: Total column of CO MOZART2 (top) and MOPITT (bottom) MOZART2 (top) and MOPITT (bottom)
JUL MOZART2, CO-column, scale=1.e17
-100 0 100-60
-40
-20
0
20
40
60
Lati
tud
e
JUL MOPITT, CO-column, scale=1.e17
-100 0 100 Longitude
-60
-40
-20
0
20
40
60
Lati
tud
e

CO “colors”, day 2CO “colors”, day 2
CO “colors”, day 65CO “colors”, day 65

CO “colors”, day 85CO “colors”, day 85

CO “colors”, 4 monthsCO “colors”, 4 months
QuickTime™ and aVideo decompressorare needed to see this picture.

MOPITT CO InversionMOPITT CO Inversion
We performed first inversion experiments using a finite-differences constructed linearization of the MOZART 2 model
MOPITT August observations of CO at 500mb were used to constrain model surface emissions of CO for August 2000
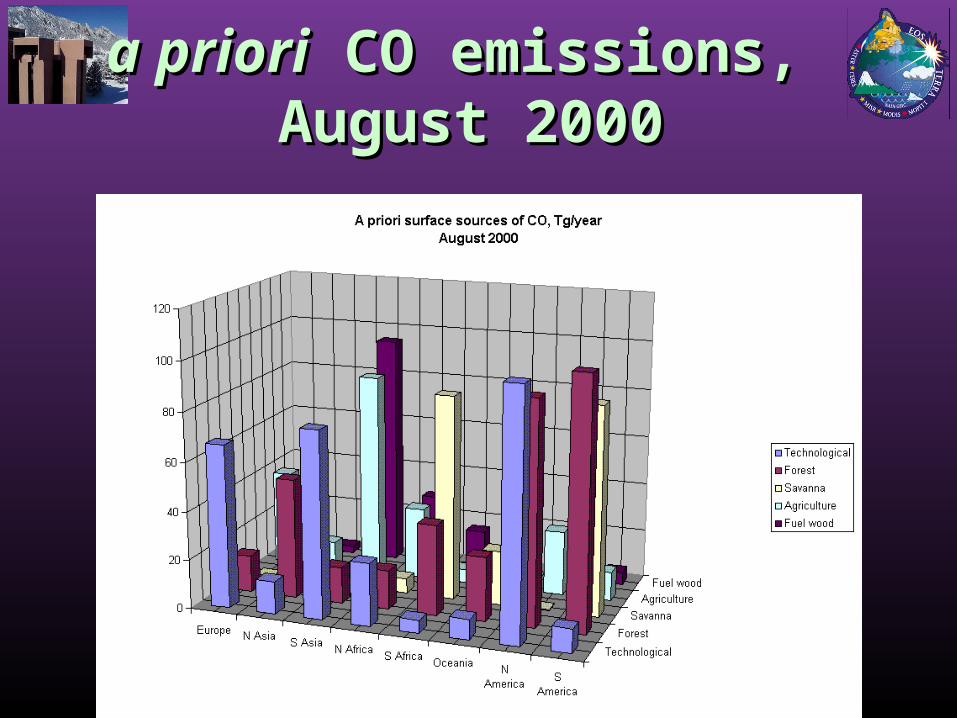
a prioria priori CO emissions, CO emissions, August 2000August 2000

CO MOPITT inversion CO MOPITT inversion August 2000August 2000

CO MOPITT inversion, CO MOPITT inversion, August 2000August 2000
! INPUTS: TYPE(ProfileType), INTENT(IN) :: Profile REAL(std) , INTENT(IN) :: NoData!! OUTPUTS: REAL(std), DIMENSION(:,:), INTENT(OUT) :: O!! LOCALS: INTEGER :: i,j,k! O(:,:) = 0.0 k=0 DO i=1,Profile_N_Lev-1 DO j=i+1,Profile_N_Lev k = k + 1 IF (k > SIZE(Profile%offDiag)) THEN CALL ABORT() ENDIF O(i,j) = Profile%offDiag(k) O(j,i) = Profile%offDiag(k) ENDDO ENDDO DO i=1,Profile_N_Lev O(i,i) = Profile%sigmaV(i)**2 ENDDO
Related Documents