1 Program Studi Teknik Telekomunikasi - Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung Praktikum Pengolahan Sinyal dalam Waktu Kontinyu sebagai bagian dari Mata Kuliah ET 2004 Modul 2 : Analisis Kelakuan Sistem Orde Dua ©Institut Teknologi Bandung Disusun oleh : Irma Zakia 31 Januari, 2018

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Program Studi Teknik Telekomunikasi - Sekolah Teknik Elektro dan Informatika
Institut Teknologi Bandung
Praktikum
Pengolahan Sinyal dalam Waktu Kontinyu
sebagai bagian dari Mata Kuliah ET 2004
Modul 2 :
Analisis Kelakuan Sistem Orde Dua
©Institut Teknologi Bandung
Disusun oleh : Irma Zakia
31 Januari, 2018

2
I. Pendahuluan
Dalam penerapannya, sistem dengan orde tinggi sering diimplementasikan dan
direpresentasikan sebagai interkoneksi seri atau paralel dari sistem-sistem orde satu dan orde
dua. Dengan demikian, analisis, perancangan, dan pemahaman kelakukan sistem orde tinggi
dapat diketahui dengan mengamati kelakuan sistem orde satu dan orde dua. Secara fisis,
sistem orde satu memodelkan sistem dengan satu buah elemen penyimpan energi, misalnya
induktor pada rangkaian RL atau kapasitor pada rangkaian RC. Sementara itu, sistem orde
dua memodelkan sistem dengan dua buah elemen penyimpan energi, misalnya kapasitor dan
induktor pada rangkaian RLC.
Kelakuan sistem orde satu, melalui percobaan menggunakan rangkaian RC, telah diketahui
dalam hal respons impuls dan respons step (modul 1). Modul ini fokus pada analisis kelakuan
sistem orde dua dalam hal respons step (domain waktu) dan respons frekuensi (domain
frekuensi). Sistem orde dua yang digunakan pada percobaan berupa rangkaian RLC seri.
Bergantung dari nilai damping ratio, respons step sistem orde dua menuju keadaan mantap
dengan berosilasi dengan amplituda osilasi mengecil (underdamped) atau menuju keadaan
mantap secara eksponensial tanpa osilasi (critically damped,overdamped). Untuk menentukan
respons frekuensi sistem, sistem diberi sinyal masukan sinus (steady-state). Pada bagian
luaran, perubahan amplituda dan fasa pada sinyal sinus luaran digunakan untuk menentukan
masing-masing respons magnituda dan respons fasa sistem. Pada modul ini, respons
frekuensi ditampilkan dalam diagram Bode.
II. Tujuan
a. Memahami kelakuan sistem orde dua pada domain waktu melalui respons step sistem
b. Memahami kelakuan sistem orde dua pada domain frekuensi melalui respons frekuensi
sistem
c. Memahami konsep respons frekuensi dengan diagram Bode
d. Memahami konsep aproksimasi respons frekuensi pada diagram Bode
e. Memahami kelakuan sistem orde dua dari lokasi pole dan zero
III. Dasar Teori
III.1. Sifat Sistem Orde Dua dari Nilai Damping Ratio
Setiap persamaan homogen dari sistem orde dua yang dideskripsikan melalui persamaan
differensial dapat ditulis dalam bentuk
𝑑2𝑦(𝑡)
𝑑𝑡2 + 2𝜁𝜔𝑛𝑑𝑦 (𝑡)
𝑑𝑡+ 𝜔𝑛
2𝑦 𝑡 = 0 (1)

3
Adapun 𝜁 menyatakan damping ratio, yang menunjukkan seberapa besar redaman / hambatan
pada sistem. Sementara itu, parameter 𝜔𝑛 menyatakan frekuensi alami sistem. Hal ini berarti
sistem berosilasi dengan frekuensi 𝜔𝑛 (dengan amplituda osilasi tetap terhadap waktu) jika
damping ratio bernilai nol.
Dari persamaan homogen tersebut, lokasi dua buah pole 𝑝1 dan 𝑝2 dapat ditentukan melalui
𝑝1 = −𝜁𝜔𝑛 + 𝜔𝑛 𝜁2 − 1 (2)
𝑝2 = −𝜁𝜔𝑛 − 𝜔𝑛 𝜁2 − 1 (3)
Besarnya nilai damping ratio menentukan lokasi pole serta sifat sistem. Untuk sistem yang
stabil, sifat sistem terbagi menjadi underdamped, overdamped, dan critically damped (Tabel
1).
Tabel 1. Sifat sistem dan lokasi pole berdasarkan nilai damping ratio
Damping
ratio
Sifat Sistem Respons step Lokasi pole
0 < 𝜁 < 1 Underdamped Sistem menuju keadaan mantap
dengan berosilasi, dimana
amplituda osilasi terhadap waktu
perlahan mengecil, dan akhirnya
menuju nol
Sepasang pole berkonjugasi
kompleks
𝑝1,2 = −𝜁𝜔𝑛 ± 𝑗𝜔𝑛 1 − 𝜁2
𝜁 > 1 Overdamped Sistem menuju keadaan mantap
tanpa osilasi (fungsi eksponensial)
Dua buah pole riil
𝑝1,2 = −𝜁𝜔𝑛 ± 𝜔𝑛 𝜁2 − 1
𝜁 = 1 Critically
damped
Sistem menuju keadaan mantap
secepat mungkin tanpa osilasi
(fungsi eksponensial)
Dua buah pole riil pada posisi
yang sama
𝑝1 = 𝑝2 = −𝜔𝑛
Perubahan lokasi pole seiring dengan perubahan damping ratio diilustrasikan pada Gbr. 1.
Untuk menghasilkan sistem yang stabil dan kausal, damping ratio dibatasi pada nilai 𝜁 > 0,
atau semua pole berada pada sebelah kiri sumbu imajiner Im{𝑠}. Dengan asumsi sistem
domain waktu bersifat riil, pole kompleks memiliki pasangan pole yang bernilai konjugasi
kompleks. Pole yang kompleks (0 < 𝜁 < 1) memberikan karakteristik domain waktu berupa
respons yang berosilasi dengan amplituda osilasi mengecil. Sementara itu, pole rill (𝜁 ≥ 1)
memberikan karakteristik domain waktu berupa respons eksponensial.
III.2. Karakteristik Domain Waktu Sistem Orde Dua
Pada bagian ini, karakteristik domain waktu sistem orde dua LTI kausal, yang dideskripsikan
dalam bentuk persamaan differensial, diberikan dalam hal respons step sistem. Sistem orde
dua diwakili melalui rangkaian RLC seri, yang diberi masukan berupa tegangan sinyal DC
𝑥(𝑡) (Gbr. 2). Sinyal luaran 𝑦(𝑡) yang diamati adalah tegangan pada kapasitor.
Untuk analisis luaran 𝑦(𝑡) saat sistem sudah steady-state, maka masukan 𝑥(𝑡) yang berupa
unit step (sinyal DC) ekivalen dengan masukan sinus frekuensi nol (𝜔 = 0). Dengan

4
demikian, kapasitor menjadi open-circuit, sedangkan induktor short-circuit. Hal ini berarti
dalam keadaan steady-state, respons step sistem sama dengan tegangan sumber, atau 𝑦(𝑡)
= 𝑥(𝑡).
Persamaan differensial rangkaian RLC seri menjadi
𝑑2𝑦(𝑡)
𝑑𝑡2 +𝑅
𝐿
𝑑𝑦 (𝑡)
𝑑𝑡+
1
𝐿𝐶𝑦 𝑡 =
1
𝐿𝐶𝑥 𝑡 (4)
Dengan melihat korespondensi antara persamaan (1) dengan (4), maka frekuensi alami sistem
ditulis sebagai
𝜔𝑛 = 1
𝐿𝐶 (5)
dan damping ratio
𝜁 =𝑅
2𝜔𝑛 𝐿 (6)
Gbr. 1 Pengaruh Damping Ratio terhadap Lokasi Pole pada Sistem Orde Dua
Gbr. 2. Rangkaian RLC seri dengan tegangan kapasitor sebagai luaran
𝑦(𝑡) 𝑥(𝑡)

5
Dengan demikian, persamaan (4) dapat ditulis juga
𝑑2𝑦(𝑡)
𝑑𝑡2 + 2𝜁𝜔𝑛𝑑𝑦 (𝑡)
𝑑𝑡+ 𝜔𝑛
2𝑦 𝑡 = 𝜔𝑛2𝑥 𝑡 (7)
Meningkatnya nilai R akan menghasilkan rangkaian yang jika semula bersifat underdamped,
menjadi critically damped atau overdamped. Secara fisis, hal ini dapat diartikan, dengan
meningkatnya nilai R (damping ratio meningkat), rugi-rugi energi juga meningkat, sehingga
osilasi sistem berkurang. Contoh lain adalah pada rangkaian osilator LC ideal: energi
ditransfer dari L ke C dan sebaliknya tanpa rugi-rugi rangkaian, sehingga dihasilkan sinyal
yang berosilasi selamanya. Jika hambatan R dihubungkan seri dengan rangkaian LC ideal
tersebut, maka R bertindak sebagai rugi-rugi. Pada keadaan demikian, R menyebabkan
rangkaian berosilasi dengan amplituda menurun bahkan lama-kelamaan menjadi nol.
Dengan menggunakan transformasi Laplace, fungsi transfer sistem yang diimplementasikan
dengan persamaan (7) adalah
𝐻 𝑠 =𝜔𝑛
2
𝑠2+2𝜁𝜔𝑛 𝑠+𝜔𝑛2 =
𝜔𝑛2
(𝑠−𝑝1)(𝑠−𝑝2) (8)
Luaran sistem dengan masukan berupa unit step menjadi
𝑌 𝑠 =𝜔𝑛
2
𝑠(𝑠−𝑝1)(𝑠−𝑝2) (9)
Respons step 𝑠 𝑡 = ℒ−1(𝑌 𝑠 ). Dikarenakan 𝑌(𝑠) rasional, 𝑠 𝑡 dapat ditentukan melalui
ekspansi pecahan parsial dari 𝑌(𝑠).
Untuk 𝜁 ≠ 1, kedua pole tidak berulang (𝑝1 ≠ 𝑝2), sehingga bentuk ekspansi pecahan parsial
𝑌 𝑠 𝜁≠1 =𝐴1
𝑠+
𝐴2
𝑠−𝑝1 +
𝐴3
(𝑠−𝑝2) (10)
Selanjutnya dapat dihitung 𝐴1 = 1, 𝐴2 =1
2 𝜁2−1−𝜁 𝜁2−1 , dan 𝐴3 =
1
2 𝜁2−1+𝜁 𝜁2−1 .
Sementara itu, untuk 𝜁 = 1, kedua pole berulang (𝑝1 = 𝑝2), sehingga bentuk ekspansi
pecahan parsial
𝑌 𝑠 𝜁=1 =𝐵1
𝑠+
𝐵2
𝑠−𝑝1 +
𝐵3
(𝑠−𝑝1)2 (11)
Nilai konstanta dihitung sebagai 𝐵1 = 1, 𝐵2 = −1, dan 𝐵3 = −𝜔𝑛 .
Respons step sistem menjadi

6
Gbr. 3. Respons step rangkaian RLC seri dengan 𝜔𝑛 = 3.1623 . 105 rad/s
𝑠 𝑡 =
1 − 𝑒−𝜁𝜔𝑛 𝑡 cos 1 − 𝜁2𝜔𝑛𝑡 −
𝜁
1 − 𝜁2𝑒−𝜁𝜔𝑛 𝑡 sin 1 − 𝜁2𝜔𝑛 𝑡 𝑢 𝑡 , untuk 0 < 𝜁 < 1
1 − 𝑒−𝜔𝑛 𝑡 − 𝜔𝑛𝑡𝑒−𝜔𝑛 𝑡 𝑢 𝑡 , untuk 𝜁 = 1
1 +𝑒
−𝜁𝜔𝑛 + 𝜁2−1𝜔𝑛 𝑡
2 𝜁2 − 1 − 𝜁 𝜁2 − 1
+𝑒
−𝜁𝜔𝑛 − 𝜁2−1𝜔𝑛 𝑡
2 𝜁2 − 1 + 𝜁 𝜁2 − 1
𝑢 𝑡 , untuk 𝜁 > 1
(12)
Respons step teoritis untuk berbagai nilai damping ratio diperlihatkan pada Gbr. 3. Seperti
yang telah dibahas sebelumnya, tampak bahawa respons transien sistem (berosilasi atau
eksponensial) bergantung dari nilai damping ratio.
III. 3. Respons Frekuensi
Respons frekuensi 𝐻(𝑗𝜔) adalah respons sistem LTI terhadap masukan sinyal sinusoid yang
steady-state, dengan frekuensi 𝜔. Hal ini merujuk pada sifat eigen dari sinyal sinusoid pada
sistem LTI, yaitu jika sistem LTI diberi masukan
𝑥 𝑡 = 𝑒𝑗𝜔𝑡 (13)
maka luaran sistem LTI adalah
𝑦 𝑡 = 𝐻(𝑗𝜔)𝑒𝑗𝜔𝑡 (14)

7
yang dalam konteks ini, 𝐻(𝑗𝜔) adalah nilai eigen.
Respons frekuensi bernilai kompleks. Bentuk polar dari respons frekuensi ditulis sebagai
𝐻 𝑗𝜔 = 𝐻(𝑗𝜔) 𝑒𝑗 (arg (𝐻(𝑗𝜔)), −∞ < 𝜔 < ∞ (15)
dengan 𝐻(𝑗𝜔) menyatakan respons magnituda dan arg(𝐻(𝑗𝜔)) adalah respons fasa.
Pada sistem riil, respons magnituda merupakan fungsi genap
𝐻(𝑗𝜔) = 𝐻(−𝑗𝜔) (16)
sedangkan respons fasa merupakan fungsi ganjil
arg 𝐻 𝑗𝜔 = −arg(𝐻(−𝑗𝜔)) (17)
III.4. Pengukuran Respons Frekuensi
Pada percobaan pengukuran respons frekuensi, digunakan sinyal masukan berupa sinus
𝑥 𝑡 = sin(𝜔𝑡) (18)
Sesuai dengan definisi respons frekuensi pada III.3., untuk masukan berupa sinyal sinus,
luaran sistem menjadi
𝑦 𝑡 = 𝐻(𝑗𝜔) sin(𝜔𝑡 + arg(𝐻(𝑗𝜔))) (19)
Dari persamaan (19), pengukuran respons frekuensi dapat dilakukan dengan mengambil
beberapa nilai frekuensi sinus 𝜔 yang berbeda pada bagian masukan. Setelah itu, respons
frekuensi ditentukan melalui pengamatan terhadap perubahan amplituda dan fasa pada sinyal
sinus bagian luaran, seperti terlihat pada Gbr. 4.
Gbr. 4 Perubahan amplituda dan fasa pada sinyal sinus luaran

8
Sesuai dengan persamaan (15), respons frekuensi ditentukan untuk nilai 𝜔 yang kontinyu.
Akan tetapi, untuk keperluan percobaan cukup diambil beberapa nilai 𝜔 yang representatif.
Untuk sinyal sinus masukan dengan frekuensi sudut 𝜔 dan periode 𝑇, respons magnituda
ditentukan melalui
𝐻(𝑗𝜔) = Aout
A in (20)
dengan Ain dan Aout masing-masing menyatakan amplituda maksimum pada sinyal masukan
dan luaran dengan frekuensi 𝜔.
Penentuan respons fasa dilakukan dengan melihat perbedaan waktu antara sinyal masukan tin
dan sinyal luaran tout seperti diilustrasikan Gbr. 4. Hal ini dikarenakan fasa dari suatu sinyal
periodik berubah 2𝜋 dalam tiap periode.
Dengan parameter tin menyatakan waktu saat sinyal masukan memotong sumbu waktu
dengan gradien positif dan tout adalah titik pertama berikutnya saat sinyal luaran memotong
sumbu waktu dengan gradien positif, besarnya respons fasa
arg 𝐻 𝑗𝜔 =tin −tout
𝑇. 2𝜋 (21)
Dikarenakan sistem bersifat kausal (direalisasikan sebagai rangkaian RLC), respons fasa
hasil pengukuran akan berada pada rentang −𝜋 ≤ arg 𝐻 𝑗𝜔𝑘 ≤ 0.
Pada percobaan, sistem bersifat riil (komponen R, L, dan C riil). Selain itu, hanya sinus
dengan frekuensi sudut 𝜔 ≥ 0 yang dapat dibangkitkan dan diukur respons frekuensinya
secara fisis. Respons magnituda dan respons fasa untuk 𝜔 < 0, ditentukan dari sifat
transformasi Fourier untuk sistem riil sesuai persamaan (16) dan (17).
III. 5. Penentuan dan Aproksimasi Respons Frekuensi dengan Diagram Bode
Spektrum suatu sinyal dan respons frekuensi suatu sistem dapat ditampilkan dalam diagram
Bode. Diagram Bode dari spektrum magnituda 𝑋(𝑗𝜔) menampilkan spektrum dalam skala
logaritmik 20log10 𝑋(𝑗𝜔) dB terhadap frekuensi skala logaritmik. Sementara itu, diagram
Bode spektrum fasa arg(𝑋(𝑗𝜔)) menampilkan spektrum fasa terhadap frekuensi skala
logaritmik. Definisi diagram Bode yang demikian berlaku juga untuk respons magnituda
𝐻(𝑗𝜔) dan respons fasa arg(𝐻(𝑗𝜔)) suatu sistem.
Tampilan spektrum magnituda dalam skala logaritmik memiliki beberapa keuntungan, yaitu:
1. Hubungan penjumlahan antara spektrum sinyal masukan dengan respons frekuensi
log 𝑌(𝑗𝜔) = log 𝑋(𝑗𝜔) + log 𝐻(𝑗𝜔) (22)
2. Jangkauan nilai magnituda yang lebih besar memberikan tampilan lebih detil, misalnya
redaman pada daerah stopband lebih terlihat jelas pada skala logaritmik .

9
Sementara itu, tampilan frekuensi dalam skala logaritmik memiliki keuntungan sebagai
berikut:
1. Jangkauan frekuensi yang lebih besar.
2. Kemudahan dalam menampilkan aproksimasi Bode diagram dengan menggunakan nilai
asimptotik frekuensi.
Secara umum, respons frekuensi dari sistem dengan fungsi transfer rasional dapat ditulis
sebagai
𝐻 𝑗𝜔 = 𝑏 (𝑗𝜔 −𝑧𝑘)𝑀
𝑘=1
(𝑗𝜔 −𝑝𝑘)𝑁𝑘=1
= 𝑏 𝑗𝜔 −𝑧1 𝑗𝜔 −𝑧2 …(𝑗𝜔 −𝑧𝑀 )
𝑗𝜔 −𝑝1 𝑗𝜔 −𝑝2 …(𝑗𝜔 −𝑝𝑁 ) (23)
dengan 𝑧𝑘 dan 𝑝𝑘 masing-masing menyatakan lokasi zero dan pole, sedangkan 𝑏 menyatakan
konstanta. Diasumsikan sistem kausal dan stabil, sehingga semua pole berada di sebelah kiri
bidang s.
Penggambaran respons frekuensi dengan diagram Bode dibedakan menjadi 2 kategori, yaitu:
1. Pole dan zero riil
2. Pasangan pole dan zero berkonjugasi kompleks
Pole dan Zero Riil
Tanpa mengurangi maksud secara umum, diasumsikan terdapat 𝐿 buah zero pada titik pusat,
yaitu 𝑧𝑘 = 0, 𝑘 = 1,2, … , 𝐿, sehingga respons frekuensi menjadi
𝐻 𝑗𝜔 = 𝑏 (𝑗𝜔)𝐿 𝑗𝜔 − 𝑧𝐿+1 𝑗𝜔 − 𝑧𝐿+2 … (𝑗𝜔 − 𝑧𝑀)
𝑗𝜔 − 𝑝1 𝑗𝜔 − 𝑝2 … (𝑗𝜔 − 𝑝𝑁)
= 𝐵 (𝑗𝜔 )𝐿 1−
𝑗𝜔
𝑧𝐿+1 1−
𝑗𝜔
𝑧𝐿+2 …(1−
𝑗𝜔
𝑧𝑀)
1−𝑗𝜔
𝑝1 1−
𝑗𝜔
𝑝2 …(1−
𝑗𝜔
𝑝𝑁)
(24)
dengan
𝐵 = 𝑏 (−𝑧𝑘)𝑀
𝑘=𝐿+1
(−𝑝𝑘)𝑁𝑘=1
(25)
Respons magnituda dalam dB dan respons fasa, masing-masing ditulis sebagai
𝐻(𝑗𝜔) 𝑑𝐵 = 20log10 𝐵 + 𝐿20log10 𝜔 + 20log10 1 −𝑗𝜔
𝑧𝑘
𝑀
𝑘=𝐿+1
− 20log10 1 −𝑗𝜔
𝑝𝑘
𝑁
𝑘=1
(26)
dan
arg 𝐻 𝑗𝜔 = arg 𝐵 + 𝐿 90° + arg 1 −𝑗𝜔
𝑧𝑘 𝑀
𝑘=𝐿+1 − arg 1 −𝑗𝜔
𝑝𝑘 𝑁
𝑘=1 (27)

10
arg 𝐵 = 0, if 𝐵 ≥ 0
±𝜋, if 𝐵 < 0 (28)
Persamaan repons magnituda dan respons fasa tersebut menunjukkan terdapat beberapa
faktor yang dijumlahkan dan dikurangkan. Faktor yang menjadi perhatian khusus adalah
faktor yang masih mengandung pole dan zero, yang masing-masing disebut sebagai faktor
pole dan faktor zero.
Tanpa mengurangi maksud secara umum, penjelasan berikut hanya melihat respons akibat
faktor pole.
Misal terdapat sebuah pole pada lokasi 𝑝1 = −𝛼, 𝛼 ∈ ℛ. Magnituda dan fasa akibat faktor
pole, masing-masing menjadi
20log10 1 +𝑗𝜔
𝛼 = 20log10 1 +
𝜔
𝛼
2
(29)
dan
arg 1 +𝑗𝜔
𝛼 = tan−1
𝜔
𝛼 (30)
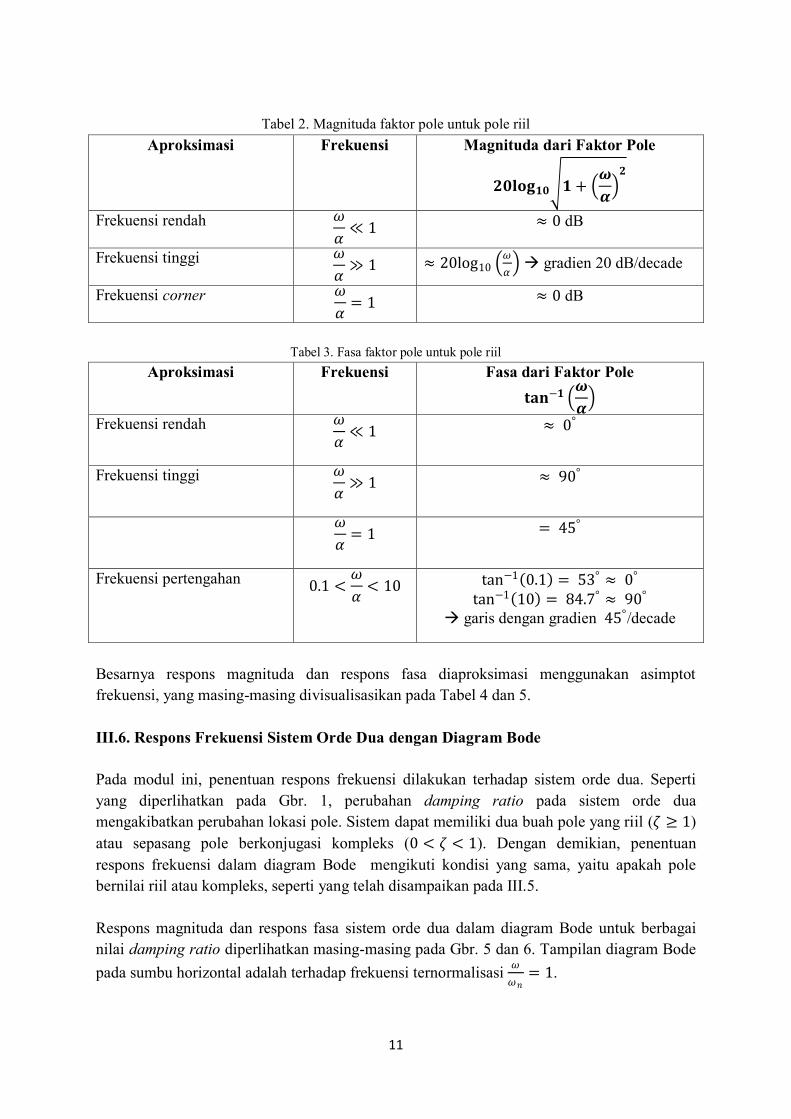
Besarnya magnituda dan fasa diaproksimasi menggunakan asimptot frekuensi, yang masing-
masing terlihat pada Tabel 2 dan 3.
Karena faktor pole berada pada bagian penyebut dari 𝐻(𝑗𝜔), maka kontribusinya negatif dari
nilai magnituda dan fasa yang masing -masing telah diberikan pada Tabel 2 dan 3. Hal
sebaliknya berlaku untuk faktor zero.
Pasangan Pole dan Zero Berkonjugasi Kompleks
Fungsi transfer yang terdiri dari pasangan pole berkonjugasi kompleks diekspresikan sebagai
𝐻 𝑠 =𝜔𝑛
2
𝑠2+2𝜁𝜔𝑛 𝑠+𝜔𝑛2 =
1
1++2𝜁
𝜔𝑛𝑠+
𝑠2
𝜔𝑛2
(31)
Respons magnituda dalam dB dan respons fasa, masing-masing ditulis sebagai
𝐻(𝑗𝜔) 𝑑𝐵 = −20log10 1 −𝜔2
𝜔𝑛2
2
+ 4𝜁2 𝜔2
𝜔𝑛2 (32)
dan
arg 𝐻(𝑗𝜔) = −tan−1 2𝜁
𝜔
𝜔𝑛
1−𝜔 2
𝜔𝑛2
(33)
Sementara untuk pasangan zero berkonjugasi kompleks, respons magnituda dan respons
fasanya adalah negatif dari respons persamaan (32) dan (33).
11
Tabel 2. Magnituda faktor pole untuk pole riil
Aproksimasi Frekuensi Magnituda dari Faktor Pole
𝟐𝟎𝐥𝐨𝐠𝟏𝟎 𝟏 + 𝝎
𝜶
𝟐
Frekuensi rendah
𝜔
𝛼≪ 1 ≈ 0 dB
Frekuensi tinggi
𝜔
𝛼≫ 1 ≈ 20log10
𝜔
𝛼 gradien 20 dB/decade
Frekuensi corner
𝜔
𝛼= 1 ≈ 0 dB
Tabel 3. Fasa faktor pole untuk pole riil
Aproksimasi Frekuensi Fasa dari Faktor Pole
𝐭𝐚𝐧−𝟏 𝝎
𝜶
Frekuensi rendah
𝜔
𝛼≪ 1
≈ 0°
Frekuensi tinggi
𝜔
𝛼≫ 1
≈ 90°
𝜔
𝛼= 1
= 45°
Frekuensi pertengahan
0.1 <𝜔
𝛼< 10 tan−1 0.1 = 53° ≈ 0°
tan−1 10 = 84.7° ≈ 90°
garis dengan gradien 45°/decade
Besarnya respons magnituda dan respons fasa diaproksimasi menggunakan asimptot
frekuensi, yang masing-masing divisualisasikan pada Tabel 4 dan 5.
III.6. Respons Frekuensi Sistem Orde Dua dengan Diagram Bode
Pada modul ini, penentuan respons frekuensi dilakukan terhadap sistem orde dua. Seperti
yang diperlihatkan pada Gbr. 1, perubahan damping ratio pada sistem orde dua
mengakibatkan perubahan lokasi pole. Sistem dapat memiliki dua buah pole yang riil (𝜁 ≥ 1)
atau sepasang pole berkonjugasi kompleks (0 < 𝜁 < 1). Dengan demikian, penentuan
respons frekuensi dalam diagram Bode mengikuti kondisi yang sama, yaitu apakah pole
bernilai riil atau kompleks, seperti yang telah disampaikan pada III.5.
Respons magnituda dan respons fasa sistem orde dua dalam diagram Bode untuk berbagai
nilai damping ratio diperlihatkan masing-masing pada Gbr. 5 dan 6. Tampilan diagram Bode
pada sumbu horizontal adalah terhadap frekuensi ternormalisasi 𝜔
𝜔𝑛= 1.

12
Tabel 4. Respons magnituda untuk pasangan pole berkonjugasi kompleks
Aproksimasi Frekuensi Respons Magnituda 𝑯(𝒋𝝎) 𝒅𝑩
Frekuensi rendah
𝜔
𝜔𝑛≪ 1
≈ 0 dB
Frekuensi tinggi
𝜔
𝜔𝑛≫ 1
≈ −40log10 𝜔
𝜔𝑛 gradien - 40 dB/decade
Frekuensi corner
𝜔
𝜔𝑛= 1
≈ 0 dB
Tabel 5. Respons fasa untuk pasangan pole berkonjugasi kompleks
Aproksimasi Frekuensi Respons Fasa 𝐚𝐫𝐠 𝑯(𝒋𝝎)
Frekuensi rendah
𝜔
𝜔𝑛≪ 1
≈ 0°
Frekuensi tinggi
𝜔
𝜔𝑛≫ 1
≈ −90°
𝜔
𝜔𝑛= 1
= −45°
Frekuensi pertengahan
0.1 <
𝜔
𝜔𝑛< 10 garis dengan gradien −90°/decade
Untuk 𝜁 = 1, diagram Bode respons magnituda (Gbr. 5) dan respons fasa (Gbr. 6)
menyerupai aproksimasi asimptotik yang diberikan masing-masing pada Tabel 2 dan 3. Perlu
diingat bahwa untuk 𝜁 = 1, terdapat dua buah pole riil dan sama, yaitu 𝑝1 = 𝑝2 = −𝜔𝑛 ,
sehingga gradien garis untuk frekuensi 𝜔
𝜔𝑛≫ 1 adalah -40 dB/decade.
Begitu pula untuk 0 < 𝜁 < 1, diagram Bode respons magnituda (Gbr. 5) dan respons fasa
(Gbr. 6) menyerupai aproksimasi asimptotik yang diberikan masing-masing pada Tabel 4 dan
5. Hanya saja, pada frekuensi corner 𝜔
𝜔𝑛= 1, nilai magnituda dipengaruhi secara signifikan
oleh besarnya damping ratio. Kesalahan magnituda pada frekuensi corner 𝜔
𝜔𝑛= 1 dapat
ditulis sebagai
20log10(2𝜁) (34)

13
Gbr.5 Respons Magnituda 𝐻(𝑗𝜔) 𝑑𝐵 Sistem Orde Dua
Gbr. 6 Respons fasa arg(𝐻 𝑗𝜔 ) Sistem Orde Dua
Seperti yang sudah dijelaskan pada subbagian III.4., penentuan respons frekuensi suatu
sistem dilakukan dengan melihat perubahan amplituda dan fasa sinyal luaran saat sinyal
masukan sinus diubah-ubah frekuensinya. Formulasi penentuan respons magnituda dan
respons fasa dapat dilihat pada persamaan (20) dan (21).
Pada modul ini, respons frekuensi ditampilkan dalam diagram Bode. Untuk itu, respons
magnituda dalam skala dB ditulis sebagai
𝐻(𝑗𝜔) 𝑑𝐵 = 20log10 𝐻(𝑗𝜔) (35)

14
Pada diagram Bode, skala frekuensi yang dipakai adalah skala logaritmik. Dengan demikian,
sinyal masukan yang dibangkitkan berada pada rentang beberapa dekade sebelum dan
sesudah frekuensi alami 𝜔𝑛 . Setelah melalui pengamatan, sinyal masukan cukup
dibangkitkan pada rentang
0.1 𝜔𝑛 ≤ 𝜔 ≤ 10𝜔𝑛 (36)
Percobaan penentuan respons frekuensi dilakukan dengan menggunakan rangkaian RLC seri
(luaran pada tegangan kapasitor) sesuai Gbr. 2. Untuk rangkaian tersebut, besarnya frekuensi
alami dan damping ratio dapat ditentukan masing-masing melalui persamaan (5) dan (6).
Sementara besarnya frekuensi osilasi dalam kedaan underdamped dinyatakan sebagai
𝜔𝑛 1 − 𝜁2 (37)
Frekuensi osilasi keadaan underdamped digunakan sebagai nilai teoritis yang nantinya akan
dibandingkan dengan salah satu hasil pada percobaan V.1 ( penentuan respons step).
IV. Persiapan Percobaan
IV.1. Peralatan yang Diperlukan
Pada percobaan ini, diperlukan peralatan sebagai berikut:
1. Modul Edibon M2
2. Generator sinyal
3. Osiloskop
4. Kabel probe sebanyak 3 buah
5. Kabel jumper
6. Flash Disk, disiapkan oleh praktikan
7. Desktop PC yang terinstal Matlab
8. Kalkulator
IV.2. Setting Trigger pada Osiloskop
Tabel 6. Setting trigger pada osiloskop
Jenis Trigger Keterangan
Mode Edge
Coupling untuk masukan sinyal DC (unit step) DC coupling
Coupling untuk masukan sinyal sinus AC coupling
Slope Positive
Source selector Ch 1 (sinyal masukan)
IV.3. Switch pada Modul Edibon M2
Pastikan semua switch pada modul berada pada posisi 1, sehingga modul bebas dari sinyal
gangguan yang disengaja.

15
V. Percobaan
V.1. Respons step
Percobaan berikut dilakukan untuk berbagai nilai damping ratio yang mewakili sistem
underdamped dan critically damped . Nilai damping ratio menentukan besarnya nilai R yang
harus diambil seperti diilustrasikan pada Tabel 7.
Tabel 7. Nilai resistor untuk damping ratio tertentu
Damping ratio 𝜻 R Edibon M2 Keadaan
0.052 330 Ω R18 underdamped
0.16 330 Ω + 680 Ω R18 seri R12 underdamped
1.0 680 Ω + 1 kΩ + 4.7 kΩ R12 seri R14 seri R11 critically damped
Langkah-langkah percobaan:
1. Buatlah rangkaian seperti Gbr. 2 dengan nilai L = 10 mH dan C = 1 nF
(L1 dan C11 pada Edibon), dan nilai R sesuai Tabel 7.
2. Hitung frekuensi alami 𝜔𝑛 yang dihasilkan dari nilai L dan C tersebut. Selanjutnya, besar
perioda osilasi alami dapat ditentukan.
3. Untuk tiap nilai resistor, bangkitkan tegangan DC berupa unit step bernilai 1 V. Hal ini
dilakukan dengan membangkitkan sinyal kotak periodik frekuensi 2 kHz, duty cycle 60%
(pembangkitan unit step yang demikian, memudahkan dalam melihat bagian transien dari
respons). Nilai tegangan 1 V diperoleh melalui tegangan peak-to-peak 1V dan offset DC
500 mV. Pengamatan sinyal masukan dan luaran nantinya cukup dilakukan untuk satu
periode.
4. Gunakan skala tegangan dan waktu pada Ch 1 dan Ch 2 osiloskop sebagai berikut:
Skala tegangan 500 mV/div ?
Skala waktu 50 𝜇𝑠/div ?
5. Lihat sinyal luaran pada osiloskop. Dalam keadaan underdamped, tentukan frekuensi
osilasi. Hal ini dilakukan dengan mengukur beberapa periode osilasi, lalu diambil nilai
rata-rata periodenya. Bandingkan dengan perhitungan frekuensi osilasi teoritis sesuai
persamaan (37).
6. Simpan data tegangan luaran pada Flash Disk. Gunakan ekstensi file .csv. Dengan
demikian, file .csv memuat 2 buah informasi yaitu waktu dan tegangan luaran (Ch 2).
7. Jangan ubah skala osiloskop, termasuk referensi waktu 𝒕 = 𝟎. Dengan nilai L dan C
yang sama, ulangi langkah 1-6 untuk nilai R lainnya pada Tabel 7.
8. Lakukan analisis pengaruh resistansi R terhadap ada/tidaknya dan kuat/lemahnya
amplituda osilasi pada tegangan luaran.
9. Pindahkan data dari Flash Disk ke perangkat lunak Matlab pada desktop PC. Simpan
data pada folder baru berlokasi di C:\Users\radartelkom_1\Desktop\Praktikum
S1\Praktikum PSWK\semester-tahun\nama modul\nama folder (misal nama kelompok).
10. Pastikan jendela utama Matlab tertaut pada lokasi folder yang telah Anda buat.
11. Panggil file .csv (sebanyak 3 file), yang masing-masing berisi tegangan luaran untuk tiap
nilai damping ratio. Simpan hasil pembacaan tiap file .csv pada suatu matriks/variabel.

16
Gunakan perintah:
nama_matriks = dlmread ′nama file. csv′ ,′ ,′ , 2,0 ;
Pada matriks tersebut, kolom 1 dan 2 masing-masing berisi waktu dan tegangan luaran.
Gunakan informasi ini untuk melakukan pengolahan terhadap isi matriks.
12. Tampilkan ketiga gambar tegangan luaran untuk tiap damping ratio dengan perintah:
plot nama_matriks_aa : ,2 , hold on;
plot nama_matriks_bb(: ,2), ′red′ , hold on;
plot nama_matriks_cc(: ,2), ′black′ ;
Keterangan:
• nama_matriks_aa adalah matriks yang memuat sinyal luaran dengan damping
ratio tertentu, kurva diberi warna biru (warna default)
• nama_matriks_bb adalah matriks yang memuat sinyal luaran dengan damping
ratio tertentu, kurva diberi warna merah
• nama_matriks_cc adalah matriks yang memuat sinyal luaran dengan damping
ratio tertentu, kurva diberi warna hitam
13. Simpan gambar dalam bentuk .jpg atau .bmp untuk dianalisis pada laporan.
14. Berikan analisis terhadap perbedaan hasil respons step dari percobaan dengan nilai
teoritis sesuai persamaan (12).
V.2. Respons Frekuensi dalam Diagram Bode
Langkah-langkah percobaan:
1. Buatlah rangkaian seperti Gbr. 2, dengan nilai dengan nilai L = 10 mH dan C = 1 nF
(L1 dan C11 pada Edibon), dan nilai R sesuai Tabel 7.
2. Bangkitkan sinyal masukan berupa sinus tegangan +3 sampai -3 V. Tegangan +3 sampai
-3 V diperoleh dengan memasukkan tegangan peak-to-peak 6 V dan offset DC 0 V.
3. Variasikan frekuensi sinus dari 5.033 kHz s.d. 503.3 kHz. Untuk tiap dekade frekuensi,
gunakan frekuensi normalisasi 𝜔
𝜔𝑛 ke- 1, 2, 4, 6, 8.
4. Dengan menggunakan osiloskop, catat nilai-nilai berikut pada logbook:
tegangan maksimum pada sinyal masukan Ain
tegangan maksimum pada sinyal luaran Aout
waktu saat sinyal masukan memotong sumbu waktu dengan gradien positif 𝑡𝑖𝑛
titik pertama setelah 𝑡𝑖𝑛 , saat sinyal luaran memotong sumbu waktu dengan gradien
positif. Titik tersebut terjadi pada waktu 𝑡𝑜𝑢𝑡 .
5. Dengan nilai L dan C yang sama, ulangi langkah 1-4 untuk nilai R lainnya pada Tabel 7.
6. Hitung besarnya respons magnituda dan respons fasa dari tampilan yang dihasilkan.
Gunakan persamaan (20) dan (21). Lakukan konversi respons magnituda ke dalam dB
sesuai persamaan (35). Catat nilainya pada logbook.
7. Tentukan diagram Bode respons magnituda (dB) dan respons fasa teoritis sesuai
persamaan (26), (27) untuk 𝜁 = 1 dan persamaan (32), (33) untuk 𝜁 = 0.052 dan
𝜁 = 0.16. Catat nilainya pada logbook.

17
8. Gambarlah diagram Bode respons magnituda (dB) dan respons fasa yang dihasilkan dari
percobaan dan yang diperoleh secara teoritis. Tampilkan juga aproksimasi asimptotik
dari diagram Bode respons magnituda (dB) dan respons fasa. Jelaskan perbedaan
diagram Bode yang didapat antara hasil percobaan, hasil teoritis, dan hasil aproksimasi
asimptotik.
9. Apa pengaruh damping ratio terhadap jenis filter yang dihasilkan rangkaian (low-pass,
high-pass, band-pass, band-stop) ?
VI. Tugas pada Laporan
Hal-hal yang harus terdapat pada laporan:
1. Semua pertanyaan yang ada pada langkah-langkah percobaan.
2. Analisis perbedaan respons step antara hasil percobaan dengan nilai teoritis.
3. Analisis perbedaan respons magnituda dalam diagram Bode antara hasil percobaan, hasil
teoritis, dan hasil aproksimasi asimptotik.
4. Analisis perbedaan respons fasa dalam diagram Bode antara hasil percobaan, hasil
teoritis, dan hasil aproksimasi asimptotik.
VII. Referensi
1. Alan V. Oppenheim, Alan S. Willsky, with S. Hamid, Signals and Systems, 2nd edition,
Prentice-Hall, 1996.
2. Simon Haykin, Barry Van Veen, Signals and Systems, 2nd edition, John Wiley & Sons,
Inc., 2004.
3. P Sannuti, Steady State Frequency Response Using Bode Plots, Rutgers University, Dec.
16, 2005.
Related Documents











