Wprowadzenie Model NRT GNSS ZTD Model NRT METEO Aplikacje GNSS Podsumowanie Modelowanie stanu atmosfery z obserwacji GNSS i meteorologicznych Jaroslaw BOSY (1) Witold ROHM (1,2) Jan KAPLON (1) Jan SIERNY(1) Tomasz HADAŚ (1) Karina WILGAN (1) (1) Uniwersytet Przyrodniczy we Wroclawiu (2) Royal Melbourne Institute of Technology, Australia PTG Oddzial Wroclaw, IMiGW, 19 lutego 2013 1/45

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Modelowanie stanu atmosfery z obserwacji GNSS imeteorologicznych
Jarosław BOSY (1) Witold ROHM (1,2) Jan KAPŁON (1)Jan SIERNY(1) Tomasz HADAŚ (1) Karina WILGAN (1)
(1) Uniwersytet Przyrodniczy we Wrocławiu(2) Royal Melbourne Institute of Technology, Australia
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 1/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Skład osobowy
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 2/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja geodezyjna
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 3/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja meteorologiczna
Meteorologia GNSS jest to zdalne sondowanie atmosfery w wykorzystaniemsygnałów GNSS. Ciągłe obserwacje z odbiorników GNSS stanowią doskonałenarzędzie do badania atmosfery ziemskiej.
Istnieje wiele zastosowań meteorologii GNSS :
Klimatologia - duża ilość jednolitych stacji, równomiernie rozłożonych, 15letnie ciągi obserwacyjne.
Meteorologia synoptyczna - Opóźnienia troposferyczne jako dodatkowedane dla modeli NWP.
Nowcasting - Opóźnienia troposferyczne jest standardowym produktemczasu rzeczywistego używanym jako syntetyczny miernik stanu atmosfery.
4D Monitorowanie - Opóźnienie troposferyczne jest wykorzystywane dobudowy modelu tomografii celem opisu przestrzennych i czasowychwłaściwości troposfery nad siecią odbiorników GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 4/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja meteorologiczna
Meteorologia GNSS jest to zdalne sondowanie atmosfery w wykorzystaniemsygnałów GNSS. Ciągłe obserwacje z odbiorników GNSS stanowią doskonałenarzędzie do badania atmosfery ziemskiej.
Istnieje wiele zastosowań meteorologii GNSS :
Klimatologia - duża ilość jednolitych stacji, równomiernie rozłożonych, 15letnie ciągi obserwacyjne.
Meteorologia synoptyczna - Opóźnienia troposferyczne jako dodatkowedane dla modeli NWP.
Nowcasting - Opóźnienia troposferyczne jest standardowym produktemczasu rzeczywistego używanym jako syntetyczny miernik stanu atmosfery.
4D Monitorowanie - Opóźnienie troposferyczne jest wykorzystywane dobudowy modelu tomografii celem opisu przestrzennych i czasowychwłaściwości troposfery nad siecią odbiorników GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 4/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja meteorologiczna
Meteorologia GNSS jest to zdalne sondowanie atmosfery w wykorzystaniemsygnałów GNSS. Ciągłe obserwacje z odbiorników GNSS stanowią doskonałenarzędzie do badania atmosfery ziemskiej.
Istnieje wiele zastosowań meteorologii GNSS :
Klimatologia - duża ilość jednolitych stacji, równomiernie rozłożonych, 15letnie ciągi obserwacyjne.
Meteorologia synoptyczna - Opóźnienia troposferyczne jako dodatkowedane dla modeli NWP.
Nowcasting - Opóźnienia troposferyczne jest standardowym produktemczasu rzeczywistego używanym jako syntetyczny miernik stanu atmosfery.
4D Monitorowanie - Opóźnienie troposferyczne jest wykorzystywane dobudowy modelu tomografii celem opisu przestrzennych i czasowychwłaściwości troposfery nad siecią odbiorników GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 4/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja meteorologiczna
Meteorologia GNSS jest to zdalne sondowanie atmosfery w wykorzystaniemsygnałów GNSS. Ciągłe obserwacje z odbiorników GNSS stanowią doskonałenarzędzie do badania atmosfery ziemskiej.
Istnieje wiele zastosowań meteorologii GNSS :
Klimatologia - duża ilość jednolitych stacji, równomiernie rozłożonych, 15letnie ciągi obserwacyjne.
Meteorologia synoptyczna - Opóźnienia troposferyczne jako dodatkowedane dla modeli NWP.
Nowcasting - Opóźnienia troposferyczne jest standardowym produktemczasu rzeczywistego używanym jako syntetyczny miernik stanu atmosfery.
4D Monitorowanie - Opóźnienie troposferyczne jest wykorzystywane dobudowy modelu tomografii celem opisu przestrzennych i czasowychwłaściwości troposfery nad siecią odbiorników GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 4/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Motywacja meteorologiczna
Meteorologia GNSS jest to zdalne sondowanie atmosfery w wykorzystaniemsygnałów GNSS. Ciągłe obserwacje z odbiorników GNSS stanowią doskonałenarzędzie do badania atmosfery ziemskiej.
Istnieje wiele zastosowań meteorologii GNSS :
Klimatologia - duża ilość jednolitych stacji, równomiernie rozłożonych, 15letnie ciągi obserwacyjne.
Meteorologia synoptyczna - Opóźnienia troposferyczne jako dodatkowedane dla modeli NWP.
Nowcasting - Opóźnienia troposferyczne jest standardowym produktemczasu rzeczywistego używanym jako syntetyczny miernik stanu atmosfery.
4D Monitorowanie - Opóźnienie troposferyczne jest wykorzystywane dobudowy modelu tomografii celem opisu przestrzennych i czasowychwłaściwości troposfery nad siecią odbiorników GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 4/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Metodyka
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 5/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
ZespółMotywacja geodezyjnaMotywacja meteorologicznaModel stanu troposfery
Schemat modelu stanu troposfery
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 6/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
GBAS - Active GeodeticNetwork ASG-EUPOS
ASG-EUPOS - 2012:
78 Polskie stacjereferencyjne GPS;
22 Polskie stacjereferencyjneGPS/GLONASS;
22 Zagraniczne stacjereferencyjneEUPOS;
15 Polskie stacjereferencyjnewłączone do sieciEUREF PermanentNetwork.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 7/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
GBAS - Active GeodeticNetwork ASG-EUPOS
ASG-EUPOS - 2012:
78 Polskie stacjereferencyjne GPS;
22 Polskie stacjereferencyjneGPS/GLONASS;
22 Zagraniczne stacjereferencyjneEUPOS;
15 Polskie stacjereferencyjnewłączone do sieciEUREF PermanentNetwork.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 7/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
GBAS - Active GeodeticNetwork ASG-EUPOS
ASG-EUPOS - 2012:
78 Polskie stacjereferencyjne GPS;
22 Polskie stacjereferencyjneGPS/GLONASS;
22 Zagraniczne stacjereferencyjneEUPOS;
15 Polskie stacjereferencyjnewłączone do sieciEUREF PermanentNetwork.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 7/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
GBAS - Active GeodeticNetwork ASG-EUPOS
ASG-EUPOS - 2012:
78 Polskie stacjereferencyjne GPS;
22 Polskie stacjereferencyjneGPS/GLONASS;
22 Zagraniczne stacjereferencyjneEUPOS;
15 Polskie stacjereferencyjnewłączone do sieciEUREF PermanentNetwork.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 7/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
GBAS - Active GeodeticNetwork ASG-EUPOS
ASG-EUPOS - 2012:
78 Polskie stacjereferencyjne GPS;
22 Polskie stacjereferencyjneGPS/GLONASS;
22 Zagraniczne stacjereferencyjneEUPOS;
15 Polskie stacjereferencyjnewłączone do sieciEUREF PermanentNetwork.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 7/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
Model ZTD z obserwacji GNSS - IGGHZ-G
Schemat procesu obliczeniowego podwójnych różnic
Tab. 1. Charakterystyka strategii L5/L3
Układ współrzędnych ITRF 2008 (na epokę pomiaru)Średnia liczba przetworzonych stacji 114Długość okna obserwacyjnego 12 godz.model ZTD a’priori/funkcja mapująca Saastamoinen/Dry NiellEstymowany model ZTD Wet NiellModel jonosfery CODE ultra-rapidRozwiązanie nieoznaczoności wide-lane (L5) & narrow-lane (L3)Średni procent wyznaczonych nieozn. 94% (L5) & 86% (L3)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 8/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
Wyniki dla 12-to godzinnego okna obserwacyjnego
Statystyka porównania rozwiązań ZTD NRT - IGGHZ-G z rozwiązaniem WATRapid dla stacji ASG-EUPOS. Wypełniony na biało prostokąt oznacza
odchylenie standardowe ZTD, linia przerywana zakres uzyskanych wartości
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 9/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Obserwacje GNSSPrzetwarzanie danych GNSSWyniki
Przykładowe mapy ZTD, dzień 311, rok 2011
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 10/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Czujniki meteorologiczne - stacje EPN
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 11/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Czujniki meteorologiczne - stacje METAR
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 12/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Czujniki meteorologiczne - stacje SYNOP
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 13/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Dane meteorologiczne
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 14/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Format danych meteorologicznych
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 15/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Numeryczny Model Prognozy Pogody (NWP) COAMPS
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 16/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Metoda interpolacji parametrów meteorologicznych
(Borkowski A., Bosy J., Kontny B. Meteorological Data and Determination ofHeights in Local GPS Networks - Preliminary Results. Electronic Journal of
Polish Agricultural Universities (EJPAU), s. Geodesy and Cartography, Vol. 5No. 2, Wrocław 2002)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 17/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Przykłady interpolacji parametrów meteorologicznych
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 18/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
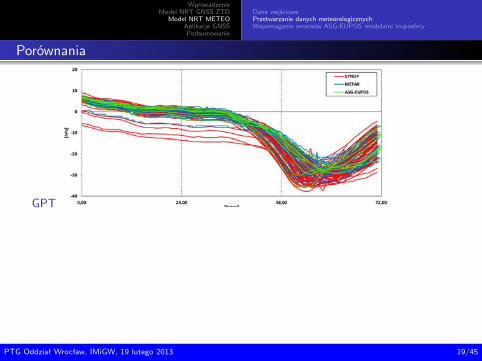
Porównania
GPT
WROC
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 19/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Porównania
GPT
WROC
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 19/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Wyniki
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 20/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Wzajemna weryfikacja danych- porównanie ciśnienia
Porównanie wartości ciśnienia dla 8 stacji EPN. Data: 14.02.2012 g. 0:00;m = 5.45hPa, σ = 11.13hPa
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 21/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Wzajemna weryfikacja danych- porównanie temperatury
Porównanie wartości temperatury dla 8 stacji EPN. Data: 14.02.2012 g. 0:00;m = −3.2oC, σ = 3.8oCPTG Oddział Wrocław, IMiGW, 19 lutego 2013 22/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Walidacja danych - porównanie ciśnienia z zewnętrznym weryfikatorem
Porównanie wartości ciśnienia z dodatkowym weryfikatorem – modelem GPT(Global Pressure and Temperature) dla 8 stacji EPN. Data 13.02.2012 (Model
GPT ma rozdzielczość czasową dobową)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 23/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Walidacja danych - porównanie temperatury z zewnętrznym weryfikatorem
Porównanie wartości temperatury z dodatkowym weryfikatorem – modelemGPT (Global Pressure and Temperature) dla 8 stacji EPN. Data 13.02.2012
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 24/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
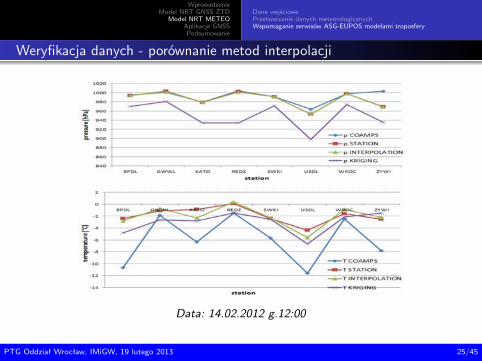
Weryfikacja danych - porównanie metod interpolacji
Data: 14.02.2012 g.12:00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 25/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Analiza długich szeregów czasowych - stacja WROC (ciśnienie)
Okres: 6.02.2012 g 0:00 – 21.10.2012 g. 23:00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 26/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Analiza długich szeregów czasowych - stacja WROC (temperatura)
Okres: 6.02.2012 g 0:00 – 21.10.2012 g. 23:00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 27/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
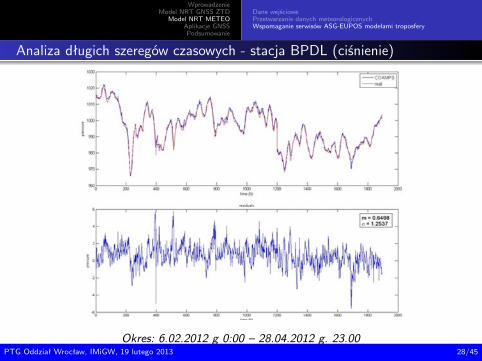
Analiza długich szeregów czasowych - stacja BPDL (ciśnienie)
Okres: 6.02.2012 g 0:00 – 28.04.2012 g. 23.00PTG Oddział Wrocław, IMiGW, 19 lutego 2013 28/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Analiza długich szeregów czasowych - stacja BPDL (temperatura)
Okres: 6.02.2012 g 0:00 – 28.04.2012 g. 23.00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 29/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
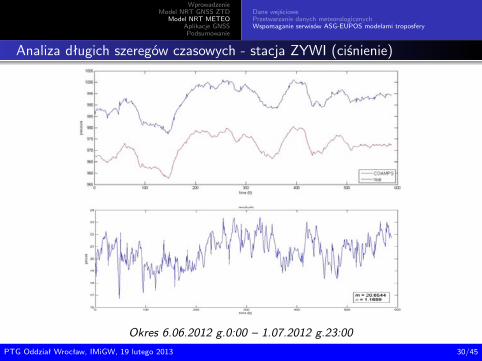
Analiza długich szeregów czasowych - stacja ZYWI (ciśnienie)
Okres 6.06.2012 g.0:00 – 1.07.2012 g.23:00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 30/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Analiza długich szeregów czasowych - stacja ZYWI (temperatura)
Okres 6.06.2012 g.0:00 – 1.07.2012 g.23:00
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 31/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dane wejściowePrzetwarzanie danych meteorologicznychWspomaganie serwisów ASG-EUPOS modelami troposfery
Schemat funkcjonalny systemu
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 32/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
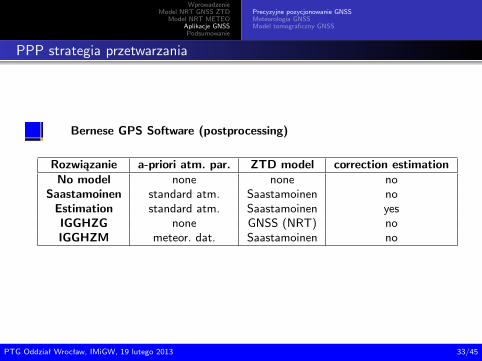
PPP strategia przetwarzania
Bernese GPS Software (postprocessing)
Rozwiązanie a-priori atm. par. ZTD model correction estimationNo model none none noSaastamoinen standard atm. Saastamoinen noEstimation standard atm. Saastamoinen yesIGGHZG none GNSS (NRT) noIGGHZM meteor. dat. Saastamoinen no
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 33/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
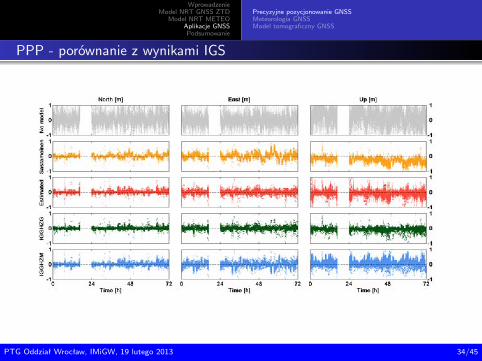
PPP - porównanie z wynikami IGS
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 34/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
IWV - model 2D
IWV =ZWD
10−6 · Rw
(k ′2 +
k3
TM
)−1
gdzie Rw = 461.525± 0.003[Jkg−1K−1] stała gazowa dla pary wodnej,k ′2 = 24± 11 [K hPa−1], k3 = 3.75± 0.03 [105K 2 hPa−1] współczynniki refrakcji, aTM ≈ 70.2± 0.72 · T0 średnia ważona temperatura pary wodnej w atmosferze, T0temperatura na wysokości anteny GNSS.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 35/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
COST-716 Format
Do upowszechniania wyników wybrano format COST-716 opracowany napotrzeby programu TOUGH (Targeting Optimal Use of GPS Humidity data inmeteorology) (Barlag, de Haan, Offiler, 2004)----------------------------------------------------------------------------------------------------COST-716 V2.0a E-GVAPIIBIAL 12235M001 Bialystok (Poland)TRIMBLE NETRS TRM41249.00 TZGD53.132083 23.138750 191.393 163.157 0.000
21-NOV-2012 09:00:00 21-NOV-2012 10:39:30IGIG BERN_V5.0 IGSULT NONE60 60 1440
00000065-99909 00 00 ffffffff 2345.4 1.5 -9.9 -9.9 -9.9 -9.9 -9.9 999.99 999.99 -9.99 -9.99 -9.999009 59 00 ffffffff 2349.5 2.7 -9.9 -9.9 -9.9 -9.9 -9.9 999.99 999.99 -9.99 -9.99 -9.9990
----------------------------------------------------------------------------------------------------
Gdzie:ZTD mZTD ZWD IWV P T RH ZTD Gradients Grad. Errors TEC2345.4 1.5 -9.9 -9.9 -9.9 -9.9 -9.9 999.99 999.99 -9.99 -9.99 -9.999
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 36/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
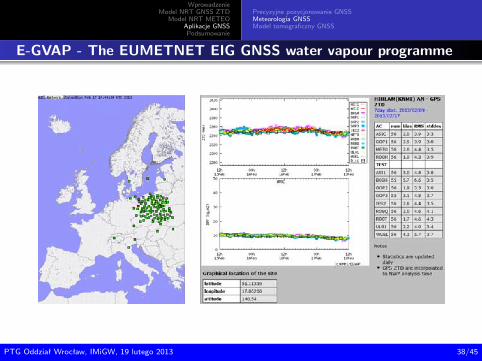
E-GVAP - The EUMETNET EIG GNSS water vapour programme
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 37/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
E-GVAP - The EUMETNET EIG GNSS water vapour programme
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 38/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Tomografia troposfery GNSS
Danymi wejściowymi do tomografii GNSS są: opóżnienie troposferyczne wkierunku do satelity SWD, które są wynikami przetwarzania danych GNSS,dane meteorologiczne ze stacji naziemnych i wyniki z numerycznychmodeli prognozy pogody (NWP).
STD można rozłożyć na składową suchą (hydrostatyczną) SHD i mokrąSWD:
STD = SHD + SWD = md (ε)ZHD + mw (ε)ZWD
gdzie ε kątem elewacji satelity, a md (ε) i mw (ε) to funkcjeodzwzorowujące.
W tomografii GNSS SWD z powyższego równania jest powiązane zrefrakcyjnością dla części mokrej Nw :
SWD = A · Nw
gdzie A jest macierzą planu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 39/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Tomografia troposfery GNSS
Danymi wejściowymi do tomografii GNSS są: opóżnienie troposferyczne wkierunku do satelity SWD, które są wynikami przetwarzania danych GNSS,dane meteorologiczne ze stacji naziemnych i wyniki z numerycznychmodeli prognozy pogody (NWP).
STD można rozłożyć na składową suchą (hydrostatyczną) SHD i mokrąSWD:
STD = SHD + SWD = md (ε)ZHD + mw (ε)ZWD
gdzie ε kątem elewacji satelity, a md (ε) i mw (ε) to funkcjeodzwzorowujące.
W tomografii GNSS SWD z powyższego równania jest powiązane zrefrakcyjnością dla części mokrej Nw :
SWD = A · Nw
gdzie A jest macierzą planu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 39/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Tomografia troposfery GNSS
Danymi wejściowymi do tomografii GNSS są: opóżnienie troposferyczne wkierunku do satelity SWD, które są wynikami przetwarzania danych GNSS,dane meteorologiczne ze stacji naziemnych i wyniki z numerycznychmodeli prognozy pogody (NWP).
STD można rozłożyć na składową suchą (hydrostatyczną) SHD i mokrąSWD:
STD = SHD + SWD = md (ε)ZHD + mw (ε)ZWD
gdzie ε kątem elewacji satelity, a md (ε) i mw (ε) to funkcjeodzwzorowujące.
W tomografii GNSS SWD z powyższego równania jest powiązane zrefrakcyjnością dla części mokrej Nw :
SWD = A · Nw
gdzie A jest macierzą planu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 39/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
model tomograficzny GNSS - Rozwiązania
Model A:
Nw = (AT · P · A)+ · AT · P · SWD
(AT · P · A)+ = V · S+ · UT
gdzie P = CSWD−1 jest macierzą wag.
Model B:
∆Nw = (AT · A)+ · AT ·∆SWD
(AT · A)+ = V · S+ · UT
Nw = Nwapriori + ∆Nw
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 40/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
model tomograficzny GNSS - Rozwiązania
Model A:
Nw = (AT · P · A)+ · AT · P · SWD
(AT · P · A)+ = V · S+ · UT
gdzie P = CSWD−1 jest macierzą wag.
Model B:
∆Nw = (AT · A)+ · AT ·∆SWD
(AT · A)+ = V · S+ · UT
Nw = Nwapriori + ∆Nw
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 40/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
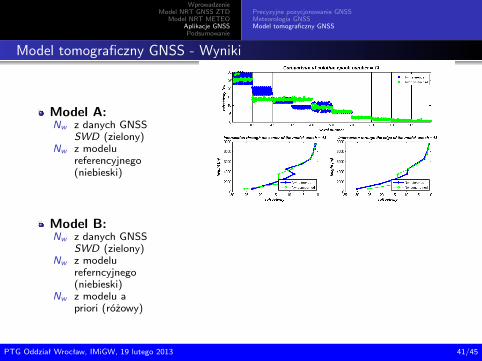
Model tomograficzny GNSS - Wyniki
Model A:Nw z danych GNSS
SWD (zielony)Nw z modelu
referencyjnego(niebieski)
Model B:Nw z danych GNSS
SWD (zielony)Nw z modelu
referncyjnego(niebieski)
Nw z modelu apriori (różowy)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 41/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Model tomograficzny GNSS - Wyniki
Model A:Nw z danych GNSS
SWD (zielony)Nw z modelu
referencyjnego(niebieski)
Model B:Nw z danych GNSS
SWD (zielony)Nw z modelu
referncyjnego(niebieski)
Nw z modelu apriori (różowy)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 41/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Model tomograficzny GNSS - Wyniki
Model A:Nw z danych GNSS
SWD (zielony)Nw z modelu
referencyjnego(niebieski)
Model B:Nw z danych GNSS
SWD (zielony)Nw z modelu
referncyjnego(niebieski)
Nw z modelu apriori (różowy)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 41/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Precyzyjne pozycjonowanie GNSSMeteorologia GNSSModel tomograficzny GNSS
Model tomograficzny GNSS - Wyniki
Model A:Nw z danych GNSS
SWD (zielony)Nw z modelu
referencyjnego(niebieski)
Model B:Nw z danych GNSS
SWD (zielony)Nw z modelu
referncyjnego(niebieski)
Nw z modelu apriori (różowy)
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 41/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Podsumowanie
1 Model troposfery NRT oparty o dane GNSS i meteorologicznemoże być stosowany w serwisach pozycjonowania GNSS czasierzeczywistym i post-processingu w systemach GBAS.
2 Istotnym elementem w pozycjonowaniu GNSS jest fakt, żeopóźnienia troposferyczne będą obliczane bezpośrednio zobserwacji, a nie jak teraz z modeli deterministycznych. Ma toszczególne znaczenie przys krótkich sesjach obserwacyjnych.
3 Tomograficzny model troposfery stworzony z danych GNSS imeteorologicznych może być konkurencyjny w stosunku domodeli numerycznych prognozy pogody (NWP), zwłaszcza dlanowcastingu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 42/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Podsumowanie
1 Model troposfery NRT oparty o dane GNSS i meteorologicznemoże być stosowany w serwisach pozycjonowania GNSS czasierzeczywistym i post-processingu w systemach GBAS.
2 Istotnym elementem w pozycjonowaniu GNSS jest fakt, żeopóźnienia troposferyczne będą obliczane bezpośrednio zobserwacji, a nie jak teraz z modeli deterministycznych. Ma toszczególne znaczenie przys krótkich sesjach obserwacyjnych.
3 Tomograficzny model troposfery stworzony z danych GNSS imeteorologicznych może być konkurencyjny w stosunku domodeli numerycznych prognozy pogody (NWP), zwłaszcza dlanowcastingu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 42/45
WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Podsumowanie
1 Model troposfery NRT oparty o dane GNSS i meteorologicznemoże być stosowany w serwisach pozycjonowania GNSS czasierzeczywistym i post-processingu w systemach GBAS.
2 Istotnym elementem w pozycjonowaniu GNSS jest fakt, żeopóźnienia troposferyczne będą obliczane bezpośrednio zobserwacji, a nie jak teraz z modeli deterministycznych. Ma toszczególne znaczenie przys krótkich sesjach obserwacyjnych.
3 Tomograficzny model troposfery stworzony z danych GNSS imeteorologicznych może być konkurencyjny w stosunku domodeli numerycznych prognozy pogody (NWP), zwłaszcza dlanowcastingu.
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 42/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Projekty
N520 014 31/2095 Lokalny przestrzenno-czasowy model tomograficznytroposfery oparty o obserwacje satelitarne GPS i parametrymeteorologiczne, czas trwania: 19.09.2006 - 18.03.2009;
N N526 197238 NRT model stanu atmosfery dla obszaru Polski zpomiarów GNSS i meteorologicznych realizowanych na stacjachreferencyjnych systemu ASG-EUPOS, czas trwania: 9.03.2010 - 8.03.2013;
N R09 0010 10 Budowa modułów wspomagania serwisów czasurzeczywistego systemu ASG-EUPOS czas trwania: 1.11.2010 - 31.10.2013;
COST Action ES1206 Advanced Global Navigation Satellite Systemstropospheric products for monitoring severe weather events and climate(GNSS4SWEC), 17 February 2013 - 20 November 2016
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 43/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Publikacje
1 Rohm W., Bosy J. (2009) Local tomography troposphere model over mountains area. AtmosphericResearch, Vol. 93 No. 4, 2009, pp. 777-783, DOI: 10.1016/j.atmosres.2009.03.013 (pkt. 27, IF 1.811);
2 Bosy J., Rohm W., Borkowski A., Figurski M., Kroszczyński K. (2010) Integration and verification ofmeteorological observations and NWP model data for the local GNSS tomography. Atmospheric Research,Vol. 96 , 2010, pp. 522-530, DOI: 10.1016/j.atmosres.2009.12.012 (pkt. 27, IF 1.597);
3 Bosy J., Rohm W., Sierny J. (2010) The concept of Near Real Time atmosphere model based of GNSS andmeteorological data from ASG-EUPOS reference stations. Acta Geodynamica et Geomaterialia, Vol. 7 No. 3(159), Prague 2010, pp. 253-261 (pkt. 9, IF 0.452);
4 Rohm W., Bosy J. (2011) The verification of GNSS tropospheric tomography model in a mountainous area.Advances in Space Research, Vol. 47 No. , 2011, pp. 1721-1730, DOI: 10.1016/j.asr.2010.04.017 (pkt. 20,IF 1.079);
5 Rohm W. (2012) The precision of humidity in GNSS tomography. Atmospheric Research, Vol. 107, 2012,pp. 69-75, DOI: 10.1016/j.atmosres.2011.12.008 (pkt. 25, IF 1.911);
6 Rohm W. (2012) The ground GNSS tomography - unconstrained approach. Advances in Space Research,Available online 24 September 2012, DOI: 10.1016/j.asr.2012.09.021 (pkt. 20, IF 1.178);
7 Bosy J., Kaplon, J., Rohm W., Sierny J. and Hadas, T.(2012) Near real-time estimation of water vapour inthe troposphere using ground GNSS and the meteorological data. Annales Geophysicae, Vol. 30, Gottingen,Germany 2012, pp. 1379-1391, DOI: 10.5194/angeo-30-1379-2012 (pkt. 25, IF 1.842);
8 Hadas T., Kaplon J., Bosy J., Sierny J., Wilgan K. (2013) Near real-time regional troposphere models forthe GNSS Precise Point Positioning technique. Measurement Science and Technology (pkt. 35, IF 1.494);
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 44/45

WprowadzenieModel NRT GNSS ZTD
Model NRT METEOAplikacje GNSSPodsumowanie
Dziękuję za uwagę[email protected]
PTG Oddział Wrocław, IMiGW, 19 lutego 2013 45/45
Related Documents











