Modelo de Cameras e Calibração Prof. Dr. Geraldo Braz Junior Slides baseados em nas notas de aula de FeiFei li

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Modelo de Cameras e Calibração Prof. Dr. Geraldo Braz Junior
Slides baseados em nas notas de aula de Fei-‐Fei li

Cameras reais
2

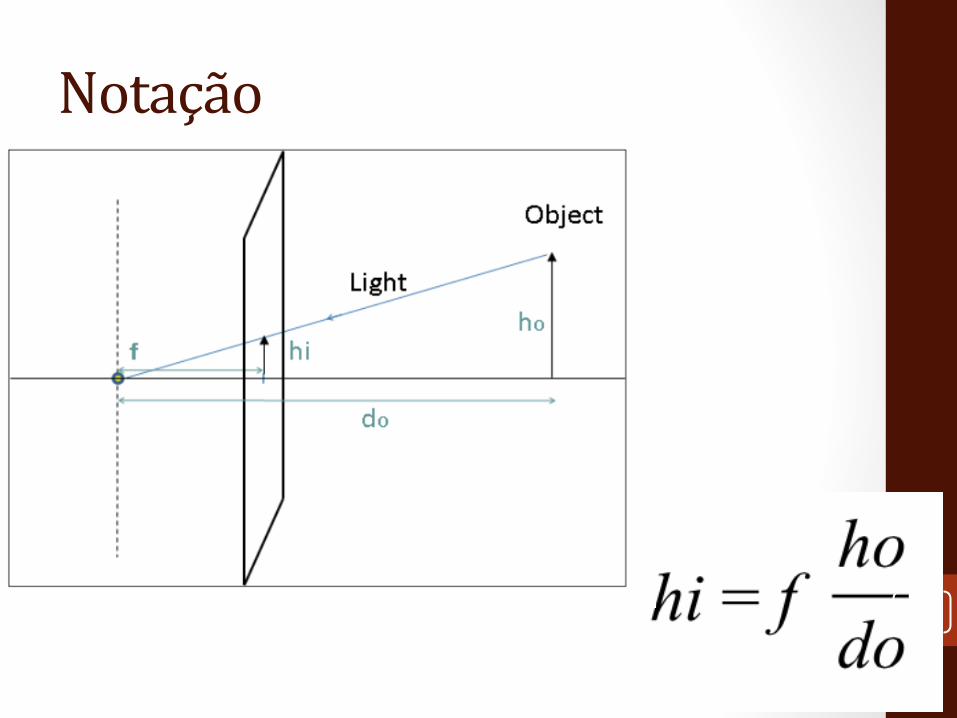
Distância Focal • do representa a distância da lente para o objeto • di representa a distância da lente para o plano da imagem (distancia focal f)
3

Simpli8icações • do >> di • plano da imagem pode ficar localizado sobre a distância focal
• Simplificação: posiciona o plano da imagem sobre o plano da lente para não obter imagens inverIdas • inverte o sinal de f
4

Pinhole
5
plano de projeção
centro de projeção
Projeção cônica
caixa
filme
objeto pinhole
raios de luz
imagem
Câmera
“pinhole”
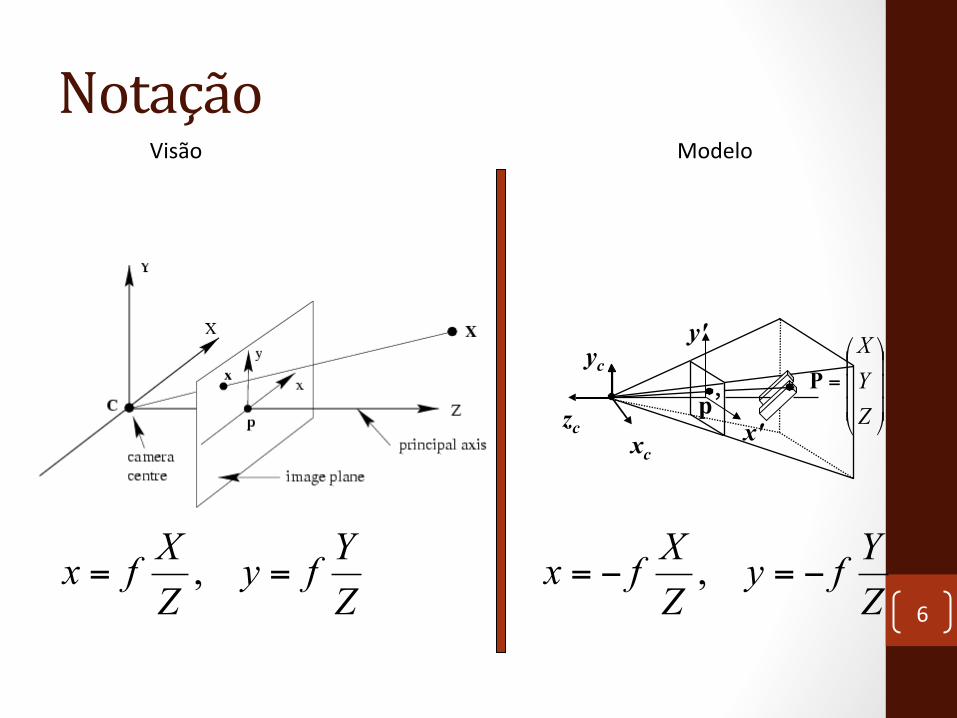
Notação
6 ZYfy
ZXfx == ,
xc
yc
zc p’ ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
ZYX
P
y'
x'
ZYfy
ZXfx −=−= ,
Modelo Visão
Notação
7
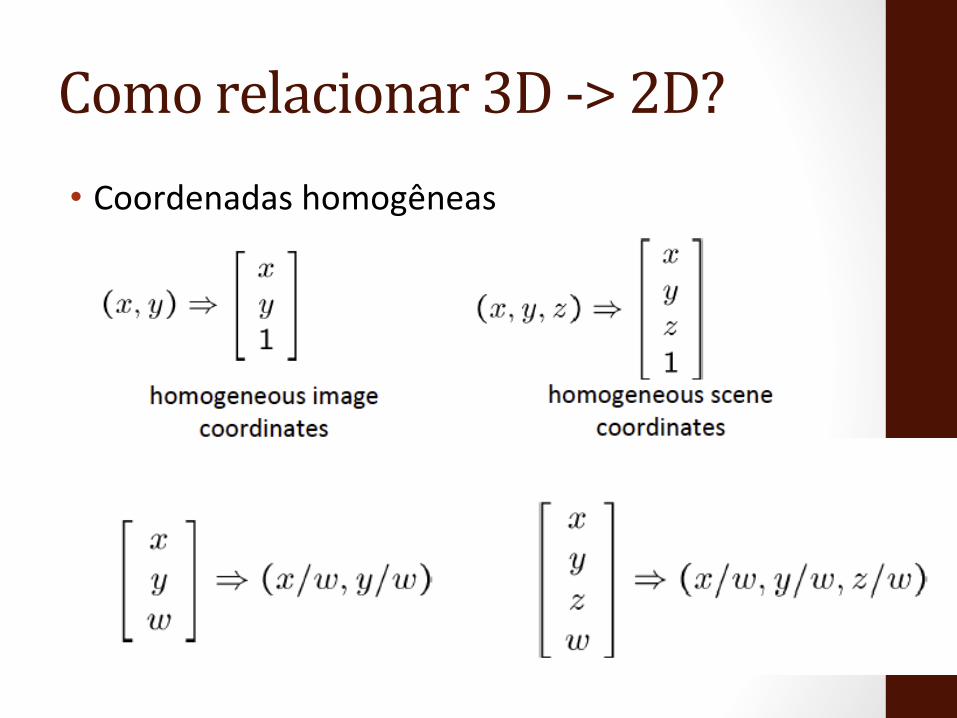
Como relacionar 3D -‐> 2D? • Coordenadas homogêneas
8
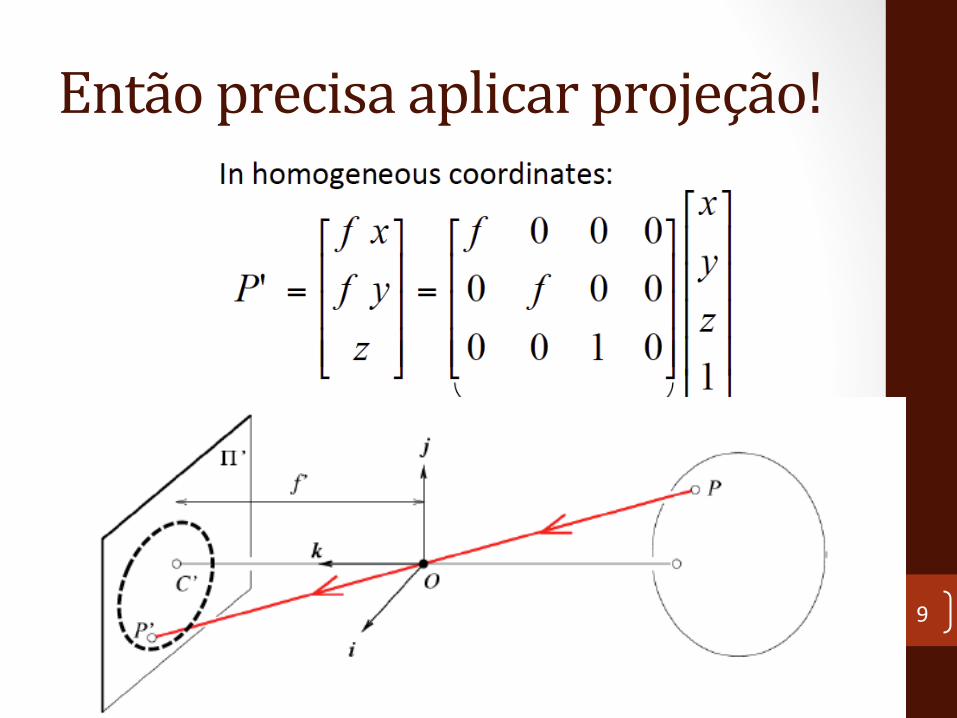
Então precisa aplicar projeção!
9
M é a matriz ideal • Assume que: • tamanho de pixel uniforme • centro óIco em (0,0) • sem distorções • sem rotações • camera em (0,0,0)
10

Analisando: decompondo
11 K é conhecido como parâmetros intrinsecos da câmera
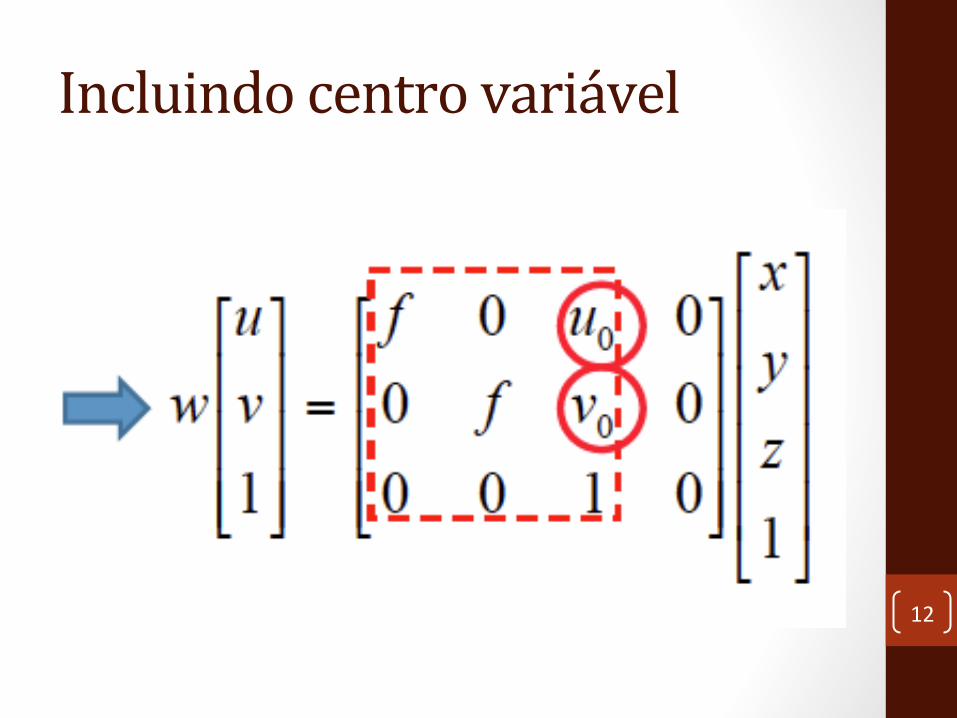
Incluindo centro variável
12

Pixels retangulares
13
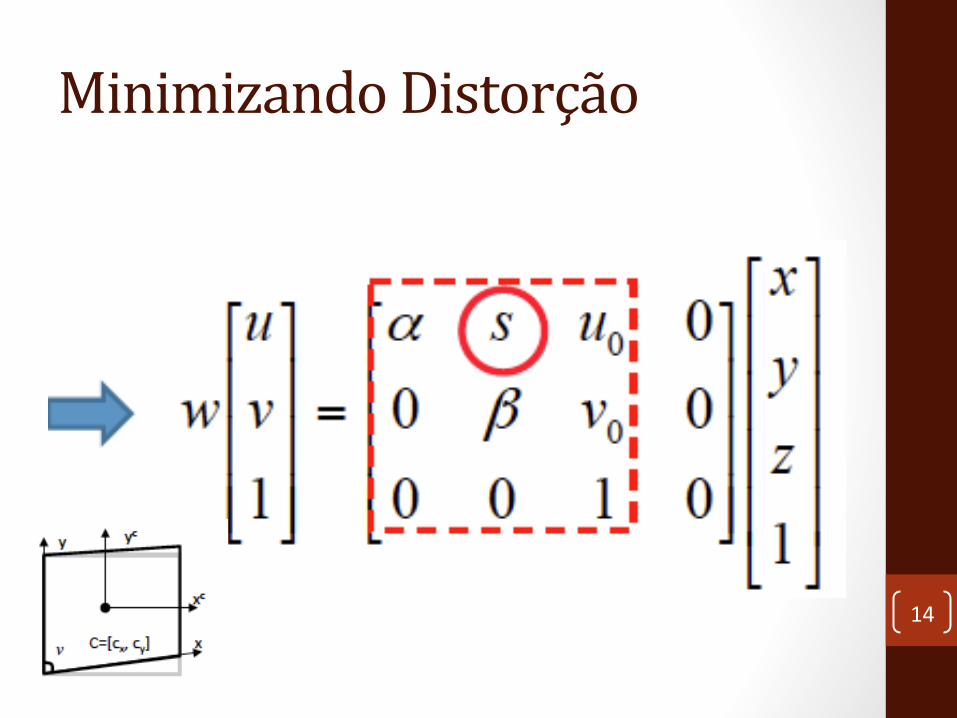
Minimizando Distorção
14

Parâmetros Intrinsecos
15

Parâmetros Extrínsecos: Rotação e Translação
16
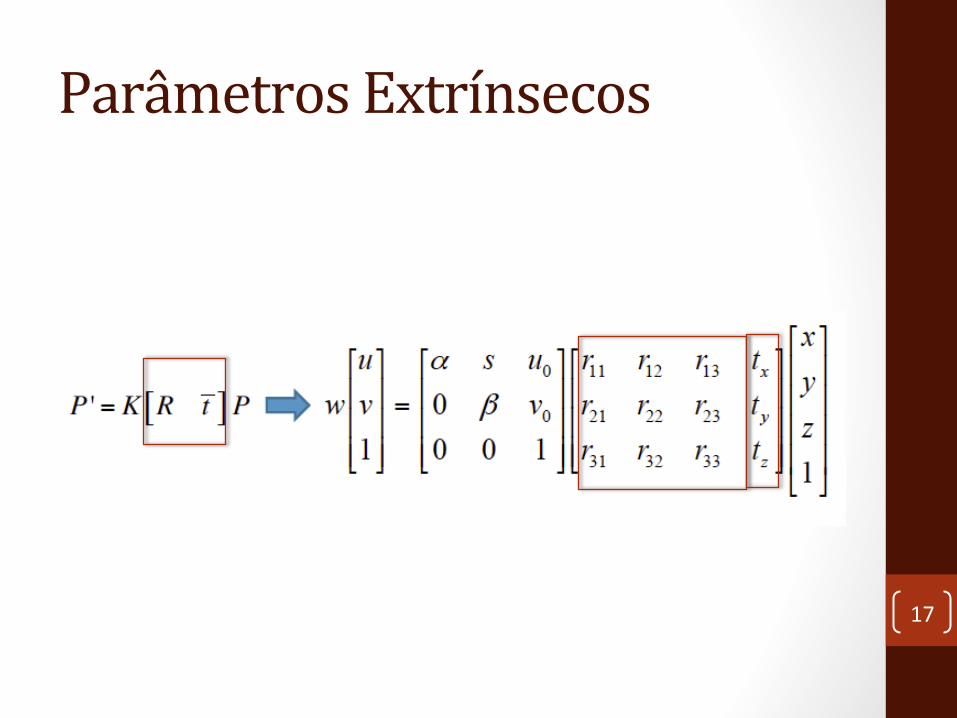
Parâmetros Extrínsecos
17
Como estimar?
• São ao todo 5+9+3 variáveis • Simplificações aplicáveis?
18

Projeção ortográ8ica • Aplicáveis de acordo com a aplicação • distância infinita, projeção paralela
19
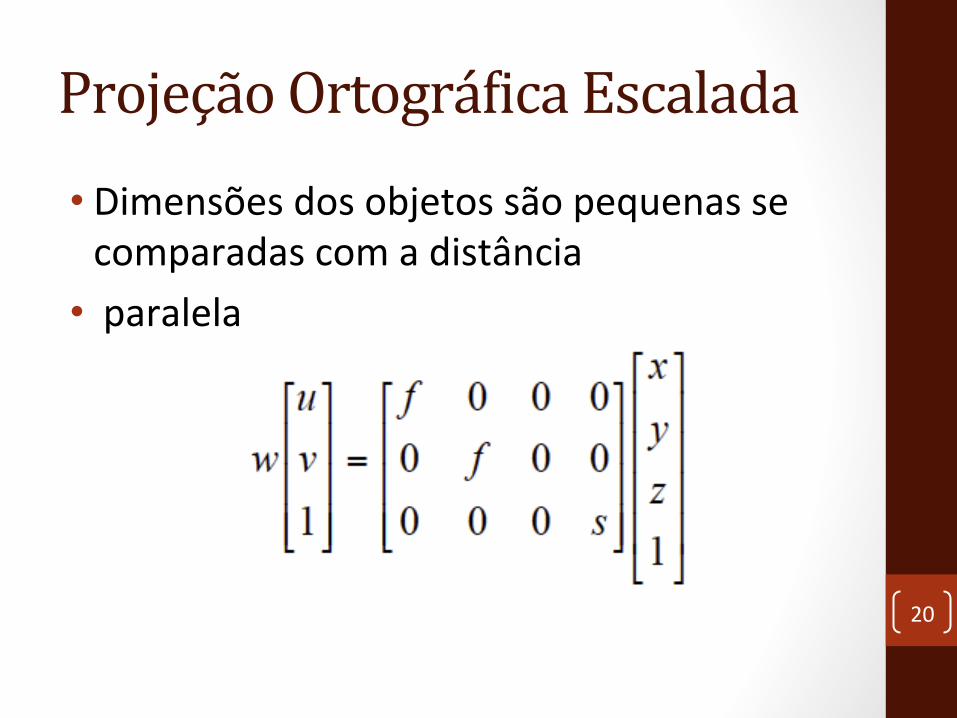
Projeção Ortográ8ica Escalada • Dimensões dos objetos são pequenas se comparadas com a distância • paralela
20
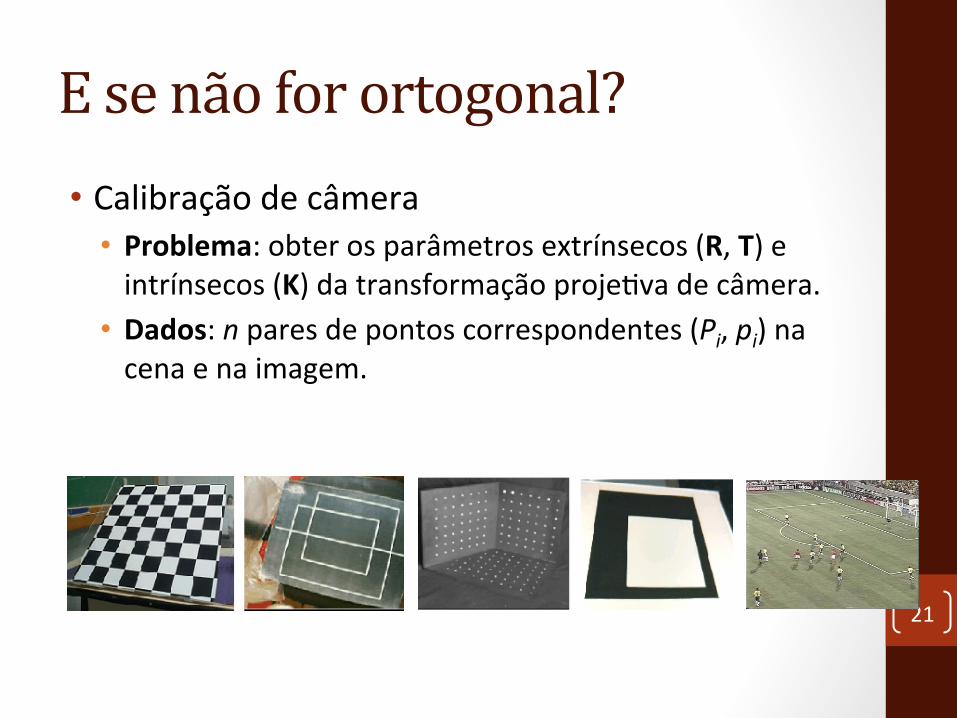
E se não for ortogonal? • Calibração de câmera • Problema: obter os parâmetros extrínsecos (R, T) e intrínsecos (K) da transformação projeIva de câmera. • Dados: n pares de pontos correspondentes (Pi, pi) na cena e na imagem.
21

Calibração de câmeras • Calibração ↔ esImação de parâmetros → oImização • Alguns métodos: Tsai, Zhang
22
2,,
,,|)(|min iTRKi
TRKPfp −∑
pontos da cena
pontos da imagem
projeção (função não linear)
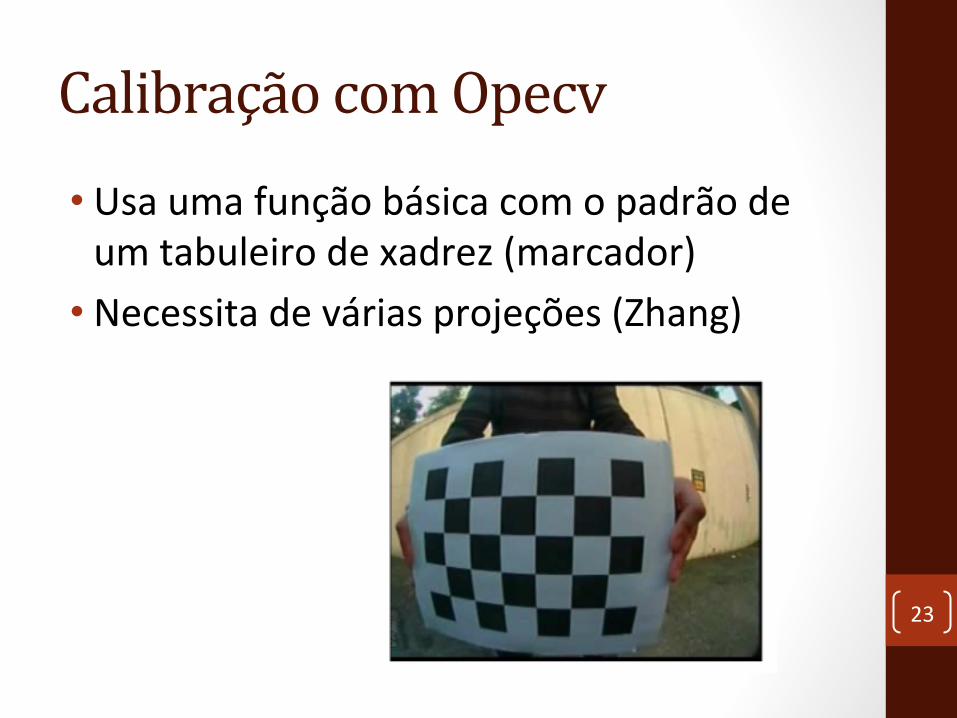
Calibração com Opecv • Usa uma função básica com o padrão de um tabuleiro de xadrez (marcador) • Necessita de várias projeções (Zhang)
23
Detectando o tabuleiro vector<cv::Point2f> imageCorners; Size boardSize(6,4);
bool found = findChessboardCorners(image, boardSize, imageCorners); -‐> imagem com o tabuleiro num ponto de vista -‐> boardSize: quantos cantos deseja detectar
24

Detectando o tabuleiro • drawChessboardCorners (image, boardSize, imageCorners, found)
25
Para calibrar • Deve inserir um conjunto de imagens como esta
• Duas listas 1. pontos num modelo ideal em 3D 2. pontos localizados na imagem
• As duas configuram a correspondência do modelo para a imagem
26

Calibrando vector<Mat> rvecs, tvecs;
calibrateCamera( objectPoints, //3D imagePoints, // pontos na imagem imageSize, // tamanho da imagem cameraMatrix, // output parâmetros intrinsecos distCoeffs, // output matriz de distorção rvecs, tvecs, // parâmetros extrínsecos flag); //
27

Reduzindo distorção initUndistortRec9fyMap(
cameraMatrix, // parâmetros intrinsecos distCoeffs, // parâmetros de distorção cv::Mat(), // opcional cv::Mat(), // opcional
image.size(), // tamanho da imagem distorcida CV_32FC1, // Ipo de saida map1, map2); // funções de mapeamento para x e y
remap(image, undistorted, map1, map2, cv::INTER_LINEAR); // Ipo de interpolação
28
29
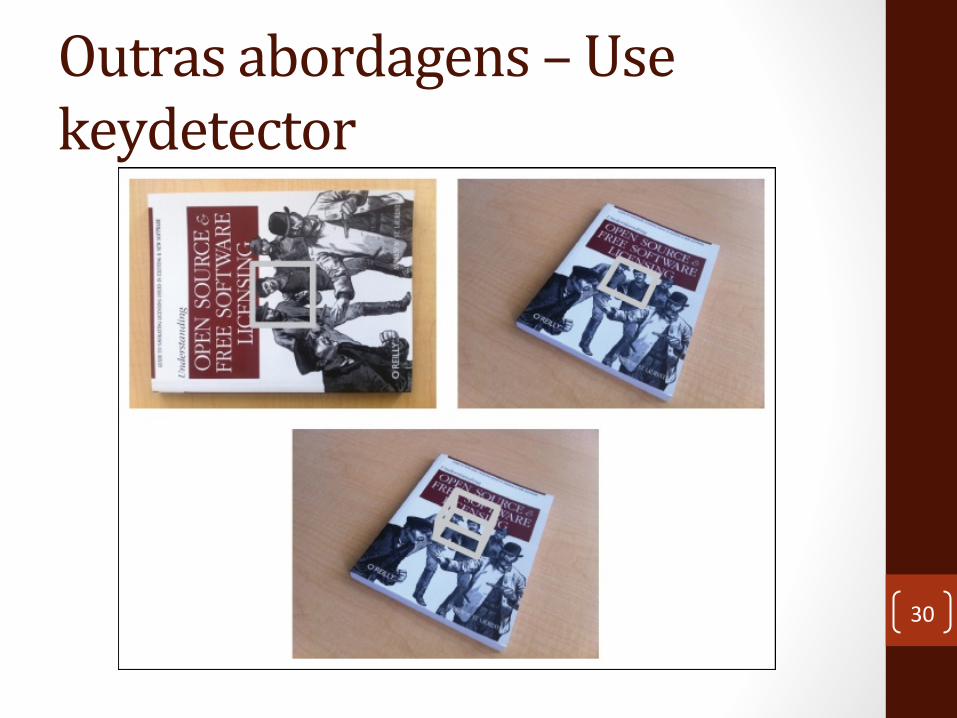
Outras abordagens – Use keydetector
30

Some o Opengl
31
Related Documents
![Microsoft Word - Diagrama de Fujo Caldo Parao[1]](https://static.cupdf.com/doc/110x72/5528789049795912048b48db/microsoft-word-diagrama-de-fujo-caldo-parao1.jpg)










