Modelling using Stochastic Differential Equations Henrik Madsen LVI Conference of Lithuanian Mathematicians Society [email protected], www.henrikmadsen.org Henrik Madsen 1

Modelling using Stochastic Differential Equations ir...Modelling using Stochastic Differential Equations Henrik Madsen LVI Conference of Lithuanian Mathematicians Society [email protected],
Mar 12, 2020
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Modelling usingStochastic DifferentialEquations
Henrik Madsen
LVI Conference ofLithuanian Mathematicians Society
[email protected],www.henrikmadsen.org
Henrik Madsen 1

Outline
1 Introduction2 Why Stochastic Differential Equations?
Example: Oxygen Concentration in a Lake
3 Model BuildingThe SDE based State Space ModelIdentification, Estimation and Model ValidationSoftware
Example: Heat dynamics of a buildingExample: Towards an artificial pancreas
4 More Advanced PrinciplesHierarchical Modelling using SDEs
Example: Diabetes – Estimation of insulin secretion rates
Spatio-temporal ModelingExample: Geolocation of fish
5 Summary
Henrik Madsen 2
Introduction
Various methods of advanced modelling are needed for anincreasing number of complex technical, physical, chemical andbiological systems.
For a model to describe the future evolution of the system, itmust
1. capture the inherently non-linear behavior of the system.2. provide means to accommodate for noise due to approximations
and measurement errors.
Calls for methods that are capable of bridging the gap betweenphysical and statistical modelling.
Henrik Madsen 3
Introduction to SDEs
Often systems are described by either1. a set of Ordinary Differential Equations (ODEs) - or2. a set of Stochastic Differential Equations (SDEs)
Solutions to ODEs are deterministic functions (of time). Solutionsto SDEs are stochastic processes.
Henrik Madsen 4

Problem Scenario
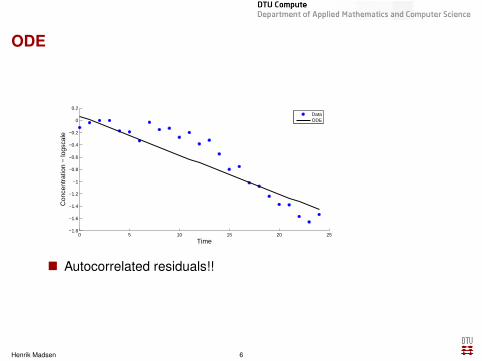
Ordinary differential equation
dA = −KA dt
Y = A + ε
Henrik Madsen 5
ODE
0 5 10 15 20 25−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Time
Con
cent
ratio
n −
logs
cale
DataODE
Autocorrelated residuals!!
Henrik Madsen 6
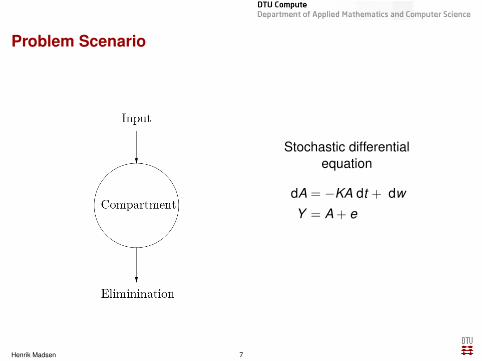
Problem Scenario
Stochastic differentialequation
dA = −KA dt + dw
Y = A + e
Henrik Madsen 7
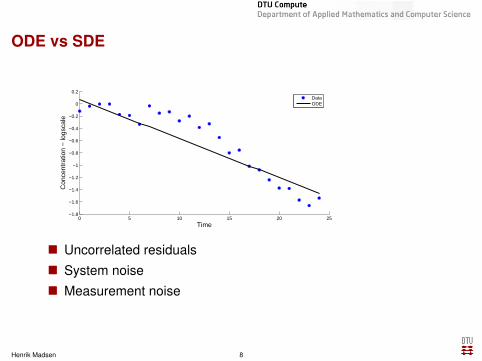
ODE vs SDE
0 5 10 15 20 25−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Time
Con
cent
ratio
n −
logs
cale
DataODE
Uncorrelated residuals System noise Measurement noise
Henrik Madsen 8
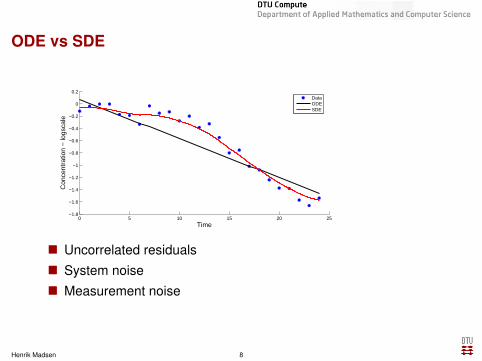
ODE vs SDE
0 5 10 15 20 25−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Time
Con
cent
ratio
n −
logs
cale
DataODESDE
Uncorrelated residuals System noise Measurement noise
Henrik Madsen 8

Grey box modelling of oxygen concentration- A sketch of the physical system
Henrik Madsen 9

Grey box modelling of oxygen concentration- A white box model
Model found in the literature:
dCdt
=K
h√
h(Cm(T )− C) + P(I)− R(T )
P(I) = PmE0I
Pm + E0I(= βI)
R(T ) = R15θT−15 [mg/l]
Cm(T ) = 14.54− 0.39T + 0.01T 2 [mg/l]
Simple - however, a non-linear model. Uncertainty of the predictions are not described (or does not
depend on horizon).
Henrik Madsen 10

Grey box modelling of oxygen concentration- A black box model
Box-Jenkins (ARX-model):
Ct − φCt−1 = ωPt + ω0 + εt
Demands equidistant data! Physical interpretation of the parameters is lost!
Henrik Madsen 11
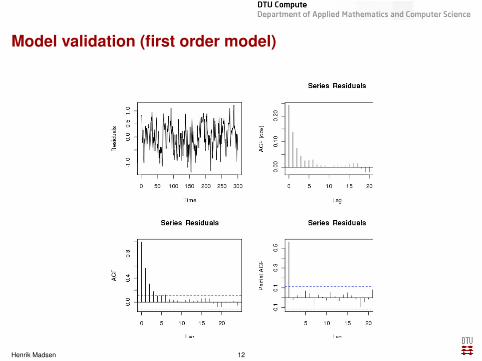
Model validation (first order model)
Henrik Madsen 12
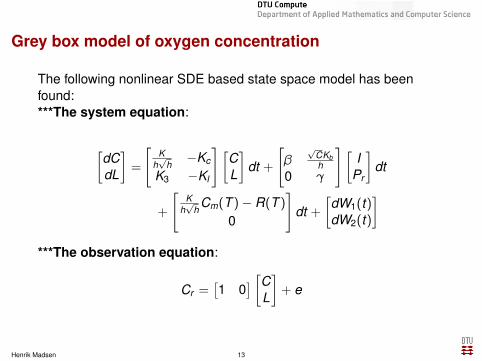
Grey box model of oxygen concentration
The following nonlinear SDE based state space model has beenfound:***The system equation:
[dCdL
]=
[K
h√
h−Kc
K3 −Kl
] [CL
]dt +
[β
√CKbh
0 γ
] [I
Pr
]dt
+
[K
h√
hCm(T )− R(T )
0
]dt +
[dW1(t)dW2(t)
]***The observation equation:
Cr =[1 0
] [CL
]+ e
Henrik Madsen 13

The grey box modelling concept
Combines prior physical knowledge with information in data. The model is not completely described by physical equations, but
equations and the parameters are physically interpretable.
Henrik Madsen 14
Why use grey box modelling?
Prior physical knowledge can be used. Non-linear and non-stationary models are easily formulated. Missing data are easily accommodated. It is possible to estimate environmental variables that are not
measured. Available physical knowledge and statistical modelling tools are
combined to identify parameters of a rather complex dynamicsystem.
The parameters contain information from the data that can bedirectly interpreted by the scientists.
The physical expert and the statistician can collaborate in themodel formulation.
Henrik Madsen 15

The continuous-discrete time stochastic state space modelSystem equation (set of Itô stochastic differential eqs.)
dX t = f (X t ,U t , θθθ) dt + G(X t ,U t , θθθ) dW t , X t0 = X 0
NotationX t ∈ Rn State vectorU t ∈ Rr Known input vectorf Drift termG diffusion termW t Wiener process of dimension, d , with incre-
mental covariance Qt
θθθ ∈ ΘΘΘ ⊆ Rp Unknown parameter vector
Henrik Madsen 16
Observation equation
The observations are in discrete time, functions of state, input, andparameters, and are subject to noise:
Y ti = h(X ti ,U ti , θθθ) + eti
NotationY ti ∈ Rm Observation vectorh Observation functioneti ∈ Rm Gaussian white noise with covariance ΣΣΣti
Observations are available at the time points ti : t1 < . . . < ti < . . . < tNX 0,W t ,eti assumed independent for all (t , ti ), t 6= ti
Henrik Madsen 17
Methods for Identification, Estimation and Model Validation
Model Identification:− Identification of lag dependencies (number of states)− Identification of model structure
Parameter Estimation:− (Approx.) Maximum Likelihood Methods− Semi-parametric MLE− Estimation Functions
Model selection:− Likelihood Ratio Tests (if models are nested)− Information Criteria (like AIC, BIC, ...)
Model Validation:− Test whether the estimated model describes the data.− Autocorrelation functions – or Lag Dependent Functions.− Other classical methods ...
Henrik Madsen 18

Continuous Time Stochastic Modelling (CTSM)
The parameter estimation is performed by using the softwareCTSM.
The software has been developed at DTU Compute. Download from: www.ctsm.info The program returns the uncertainty of the parameter estimates
as well.
Henrik Madsen 19

The estimation procedure (CTSM)
CTSM is based on The Extended Kalman Filter Approximate likelihood estimation
and provides eg. Likelihood testing for nested models Calculations of smoothen state E [X t |YT ]
Calculations of k-step predictions E [X t |Yt−k ].
Henrik Madsen 20

The estimation procedure (CTSM)
CTSM is based on The Extended Kalman Filter Approximate likelihood estimation
and provides eg. Likelihood testing for nested models Calculations of smoothen state E [X t |YT ]
Calculations of k-step predictions E [X t |Yt−k ].
Henrik Madsen 20

Flexhouse layout
Henrik Madsen 21

RC-diagram ofte used for illustrating linear models
Rie
Rie
Rea
Rea
Ti
Ti
Ta
Ta
Te
Te
Φh
Φh
Ci
Ci
Ce
Ce
Henrik Madsen 22
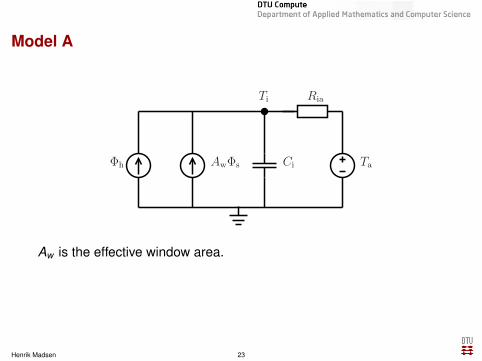
Model A
RiaTi
TaΦh CiAwΦs
Aw is the effective window area.
Henrik Madsen 23

Model Validation for Model A
Autocorrelation function and Periodogram for the residuals.
0 5 10 15 20 25 30 35
−1.
0−
0.5
0.0
0.5
1.0
lag
AC
F
0.0 0.1 0.2 0.3 0.4 0.5
0.0
0.2
0.4
0.6
0.8
1.0
frequency
Model is seen not to be adequate.
Henrik Madsen 24

Model E
After some steps: (Notice that eg. the electric heating system isincluded)
Henrik Madsen 25

Model Validation for Model E.
0 5 10 15 20 25 30 35
−1.
0−
0.5
0.0
0.5
1.0
lag
AC
F
0.0 0.1 0.2 0.3 0.4 0.5
0.0
0.2
0.4
0.6
0.8
1.0
frequency
It is concluded that the model is adequate.
Henrik Madsen 26

Model for closed loop control
Insulin(subc.)
Insulin(plasma)
Insulineffect
Glucose(plasma)
Intestinalcomp.
Intestinalcomp.
Glucose(int.)
Glucose(subc.)
BLOOD
MealInsulin
CGM
Liver
Henrik Madsen 27
Advanced TopicsHierarchical/Population Modelling – Introduction
Data originating from several population members/subjects Identical experiments Modelling the effect of covariates More data - better estimates of parameters and uncertainties. Software: Population Stochastic Modelling (PSM) or CTSM-R with some extensions - See Juhl et.al. (2015) Software download: www.imm.dtu.dk/psm or
www.ctsm.info
Nonlinear mixed effects model with SDEs
Henrik Madsen 28

Advanced TopicsHierarchical/Population Modelling – Introduction
Data originating from several population members/subjects Identical experiments Modelling the effect of covariates More data - better estimates of parameters and uncertainties. Software: Population Stochastic Modelling (PSM) or CTSM-R with some extensions - See Juhl et.al. (2015) Software download: www.imm.dtu.dk/psm or
www.ctsm.info
Nonlinear mixed effects model with SDEs
Henrik Madsen 28
Population Modelling – Stages
A population model consists of 2 stages
1st stage models the process variation within a single populationmember/subject
2nd stage models the variation in parameters between populationmembers/subjects like:
φφφi = g(θθθ,Z i ) · exp(ηηηi )
ηηηi ∈ N(0,ΩΩΩ)
Henrik Madsen 29
Population – Parameter estimation
Parameter estimation using likelihood theory Single member/subject - likelihood based on product of
conditional densities for each time series of length ni (called p1
below). Population likelihood is a combination of the random effects η
and the single member likelihoods
L(θθθ|YNni ) ∝N∏
i=1
∫p1(Yini |φφφi )p2(ηηηi |ΩΩΩ)dηηηi
Henrik Madsen 30

Data – 24H study
12 type 2 diabetic patients Three standardized meals
Henrik Madsen 31

ISR estimate by deconvolution
C-peptide (the observation) is modelled with a 2-compartmentmodel
ISR modelled as a random walk (the third state in x)
dx =
−(k1 + ke) k2 1k1 −k2 00 0 0
x dt + diag
00σISR
dωωω
y = C1 + ε
Henrik Madsen 32

ISR estimate by deconvolution
Smoothed estimate of ISR for individual 1 and 2.
Henrik Madsen 33
Geolocation of Fish
Goal: Learn the structure of fish’movements
GPS systems do not work underwater
’Data storage tages’ formeasuring the pressure (depthunder the surface)
Data gets available at capture ofthe fish
Henrik Madsen 34
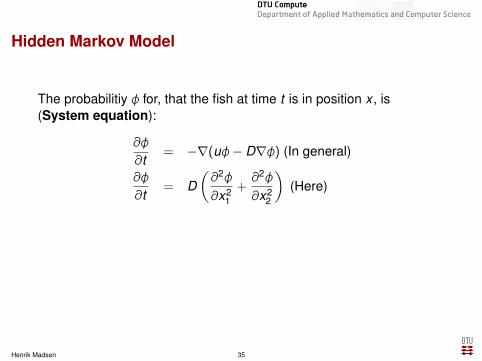
Hidden Markov Model
The probabilitiy φ for, that the fish at time t is in position x , is(System equation):
∂φ
∂t= −∇(uφ− D∇φ) (In general)
∂φ
∂t= D
(∂2φ
∂x21
+∂2φ
∂x22
)(Here)
The observations are(Observ. equation):
Yk = Measured pressure/dept at time point tk
Henrik Madsen 35

Hidden Markov Model
The probabilitiy φ for, that the fish at time t is in position x , is(System equation):
∂φ
∂t= −∇(uφ− D∇φ) (In general)
∂φ
∂t= D
(∂2φ
∂x21
+∂2φ
∂x22
)(Here)
The observations are(Observ. equation):
Yk = Measured pressure/dept at time point tk
Henrik Madsen 35
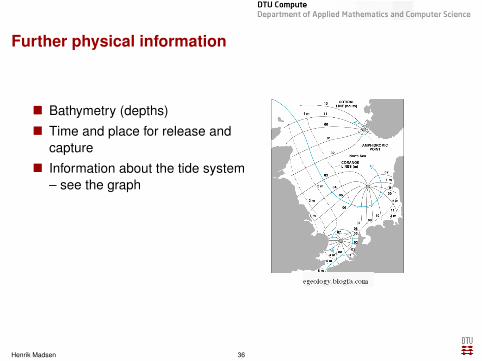
Further physical information
Bathymetry (depths) Time and place for release and
capture Information about the tide system
– see the graph
Henrik Madsen 36
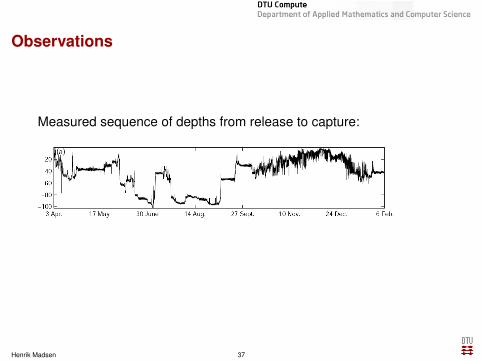
Observations
Measured sequence of depths from release to capture:
Where has the fish been ?
Henrik Madsen 37

Observations
Measured sequence of depths from release to capture:
Where has the fish been ?
Henrik Madsen 37

Geolocation of Fish
Henrik Madsen 38
Summary
By using stochastic differential equations for modelling physical/prior knowledge and information in data are combined,
i.e. we are able to bridge the gap between physical and statisticalmodeling.
we obtain a description of the persistence in the differencesbetween observations and model predictions.
we obtain a rich framework for model identification, estimation,validation and structure modification.
we obtain probabilistic forecasts and simulations.
Henrik Madsen 39

Thanks to:
Jan Kloppenborg Møller Lasse Engbo Christiansen Peder Bacher Anne Katrine Duun-Henriksen Rune Juhl Niels Rode Kristensen Martin Wæver Pedersen Henrik Melgaard
Henrik Madsen 40

Some References - Generic
H. Madsen: Time Series Analysis, Chapman and Hall, 392 pp, 2008.
H. Madsen and P. Thyregod: An Introduction to General and Generalized Linear Models, Chapman and Hall, 340 pp., 2011.
E. Linström, H. Madsen, J.N. Nielsen: Statistics for Finance, Chapman and Hall, 360 pp., 2015.
H.Aa. Nielsen, H. Madsen: A generalization of some classical time series tools, Computational Statistics and Data Analysis, Vol.37, pp. 13-31, 2001.
H. Madsen, J. Holst: Estimation of Continuous-Time Models for the Heat Dynamics of a Building, Energy and Building, Vol. 22, pp.67-79, 1995.
P. Sadegh, J. Holst, H. Madsen, H. Melgaard: Experiment Design for Grey Box Identification, Int. Journ. Adap. Control and SignalProc., Vol. 9, pp. 491-507, 1995.
P. Sadegh, L.H. Hansen, H. Madsen, J. Holst: Input Design for Linear Dynamic Systems using Maxmin Criteria, Journal ofInformation and Optimization Sciences, Vol. 19, pp. 223-240, 1998.
J.N. Nielsen, H. Madsen, P.C. Young: Parameter Estimation in Stochastic Differential Equations; An Overview, Annual Reviews inControl, Vol. 24, pp. 83-94, 2000.
N.R. Kristensen, H. Madsen, S.B. Jørgensen: A Method for systematic improvement of stochastic grey-box models, Computersand Chemical Engineering, Vol 28, 1431-1449, 2004.
N.R. Kristensen, H. Madsen, S.B. Jørgensen: Parameter estimation in stochastic grey-box models, Automatica, Vol. 40, 225-237,2004.
J.B. Jørgensen, M.R. Kristensen, P.G. Thomsen, H. Madsen: Efficient numerical implementation of the continuous-discreteextended Kalman Filter, Computers and Chemical Engineering, 2007.
K.R. Philipsen, L.E. Christiansen, H. Hasman, H. Madsen: Modelling conjugation with stochastic differential equations, Journal ofTheoretical Biology, Vol. 263, pp. 134-142, 2010.
R. Juhl, J.K. Møller, J.B. Jørgensen, H. Madsen: Modeling and Prediction using Stochastic Differential Equations, Springer bookchapter, 2015
Henrik Madsen 41
Related Documents











