Vehicle System Dynamics Vol. 43, Supplement, 2005, 145–155 Modelling of vibration damping in pneumatic tyres ATANASA. POPOV* and ZUNMIN GENG School of Mechanical, Materials and Manufacturing Engineering, University of Nottingham, University Park, Nottingham NG7 2RD, UK The paper deals with the measurement, identification and modelling of vibration damping in heavy vehicle tyres. Recent developments in vibration analysis are applied in order to extend the damping modelling to more general cases than viscous or hysteretic damping models based on a dissipation matrix. Both the general first-order state-space approach and the second-order small-damping method are critically reviewed. A general procedure for damping identification is developed and implemented. The only limitation to this procedure is that structural linearity and reciprocity should be satisfied; this has been adequately proven for pneumatic tyres. The best theoretical results have been achieved by assuming non-proportional viscous damping in the tyre and through the application of modal analysis techniques based on complex-valued modes. Keywords: Pneumatic tyres; Damping identification; Modal analysis; Non-proportional viscous damping; Complex modes; Tyre modelling 1. Introduction The interaction between a tyre and the road, together with the interaction between a tyre and the surrounding air, leads to a multitude of noises and vibrations [1]. Since tyre dynamics are central to the transmission and dissipation of vibrational and acoustical energy, one can reasonably argue that tyre damping is essential for the underlying physical phenomena. How- ever, the role of tyre damping in vehicle dynamics is somewhat overshadowed by other factors which are thought to be of more importance. For example, the vehicle designer relies mostly on damping in the shock absorbers in the low-frequency range and on dissipation of sound energy in the vehicle body within the audible-frequency range. A good balance in model complexity between a tyre and a vehicle is needed to obtain efficient and accurate vehicle simulations. It is relatively easy to measure or calculate the inertia and stiffness properties of a tyre; however, the accurate determination of damping parameters currently presents an unsolved problem. Damping is the removal of energy from a vibrating system [2]. The energy lost is either transmitted away from the system by some mechanism of radiation or dissipated within the system. All structures exhibit vibration damping but, despite a large body of literature on the subject, damping remains one of the least well-understood aspects of vibration analysis. *Corresponding author. Email: [email protected] Vehicle System Dynamics ISSN 0042-3114 print/ISSN 1744-5159 online © 2005 Taylor & Francis http://www.tandf.co.uk/journals DOI: 10.1080/00423110500140765

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Vehicle System DynamicsVol. 43, Supplement, 2005, 145–155
Modelling of vibration damping in pneumatic tyres
ATANAS A. POPOV* and ZUNMIN GENG
School of Mechanical, Materials and Manufacturing Engineering, University of Nottingham,University Park, Nottingham NG7 2RD, UK
The paper deals with the measurement, identification and modelling of vibration damping in heavyvehicle tyres. Recent developments in vibration analysis are applied in order to extend the dampingmodelling to more general cases than viscous or hysteretic damping models based on a dissipationmatrix. Both the general first-order state-space approach and the second-order small-damping methodare critically reviewed. A general procedure for damping identification is developed and implemented.The only limitation to this procedure is that structural linearity and reciprocity should be satisfied; thishas been adequately proven for pneumatic tyres. The best theoretical results have been achieved byassuming non-proportional viscous damping in the tyre and through the application of modal analysistechniques based on complex-valued modes.
Keywords: Pneumatic tyres; Damping identification; Modal analysis; Non-proportional viscousdamping; Complex modes; Tyre modelling
1. Introduction
The interaction between a tyre and the road, together with the interaction between a tyre andthe surrounding air, leads to a multitude of noises and vibrations [1]. Since tyre dynamicsare central to the transmission and dissipation of vibrational and acoustical energy, one canreasonably argue that tyre damping is essential for the underlying physical phenomena. How-ever, the role of tyre damping in vehicle dynamics is somewhat overshadowed by other factorswhich are thought to be of more importance. For example, the vehicle designer relies mostlyon damping in the shock absorbers in the low-frequency range and on dissipation of soundenergy in the vehicle body within the audible-frequency range.
A good balance in model complexity between a tyre and a vehicle is needed to obtainefficient and accurate vehicle simulations. It is relatively easy to measure or calculate theinertia and stiffness properties of a tyre; however, the accurate determination of dampingparameters currently presents an unsolved problem.
Damping is the removal of energy from a vibrating system [2]. The energy lost is eithertransmitted away from the system by some mechanism of radiation or dissipated within thesystem. All structures exhibit vibration damping but, despite a large body of literature onthe subject, damping remains one of the least well-understood aspects of vibration analysis.
*Corresponding author. Email: [email protected]
Vehicle System DynamicsISSN 0042-3114 print/ISSN 1744-5159 online © 2005 Taylor & Francis
http://www.tandf.co.uk/journalsDOI: 10.1080/00423110500140765

146 A. A. Popov and Z. Geng
It so happens that damping forces are usually small in magnitude when compared with otherinteractions in a mechanical system but play an important role in the dynamic response;yet their mathematical description remains much more complicated. There is a fundamentalproblem because it is not in general clear which state variables govern the damping forces.
A widely used damping model, originated by Lord Rayleigh [3], assumes that instantaneousgeneralized velocities are the only relevant state variables which determine the damping forces;this is the celebrated ‘viscous damping’ model. It leads to a description of damping behaviourby a dissipation matrix, directly analogous to the mass and stiffness matrices of structuralmechanics. A step further in the idealization, also introduced by Rayleigh, is to assume thedamping matrix to be a linear combination of the mass and stiffness matrices, the so-calledproportional damping. Under this assumption the frequencies and modes of vibration for thesystem under investigation have real values. There is no obvious reason to expect physicalsystems to exhibit proportional damping, and complex modes of vibration should be regardedas the norm; complex modes of vibration arise even with viscous damping provided that itis non-proportional.
There is a variety of tyre models in the literature with different levels of complexity, rangingfrom a simple spring–damper element (single point contact) through flexible-ring-type modelsto detailed finite-element simulations (see [4] for an account). In all these models, whendamping effects were included, they were almost invariably of the equivalent proportionalviscous damping type. Moreover, damping values as high as 10% of critical damping havebeen reported and used for vehicle simulations [1, 5]. On the other hand, in studies mainlyconcerned with the performance of automotive suspensions, the whole amount of chassisdamping was considered to arise from the shock absorbers under the assumption that tyredamping is much smaller in magnitude than suspension damping (see, for example, [6]).Other researchers in the area [7] disagreed with this assumption and argued that a separateconsideration of tyre damping is essential because tyre damping is responsible for the couplingbetween sprung and unsprung mass motions at the wheel-hop frequency.
Assuming the damping matrix to be of non-proportional viscous type, then direct decouplingof the second-order differential equations of structural dynamics is impossible. Generally, thefirst-order state-space approach [8] becomes the only feasible method. Woodhouse [9] showedthat, for small damping, models of damping can be obtained by using directly the second-orderdifferential equations of structural dynamics, employing a first-order perturbation expansionbased on the undamped modes and natural frequencies. A method was proposed to obtaindamping models from complex mode shapes and frequencies of vibration [10], and the fea-sibility of this approach was demonstrated on idealized linear arrays of damped spring–massoscillators. However, it was not clear whether this approach was applicable to experimentaldata obtained for complex real structures. This important issue is addressed here in an attemptto employ the new theoretical results to the pneumatic tyre.
2. Experimental measurements
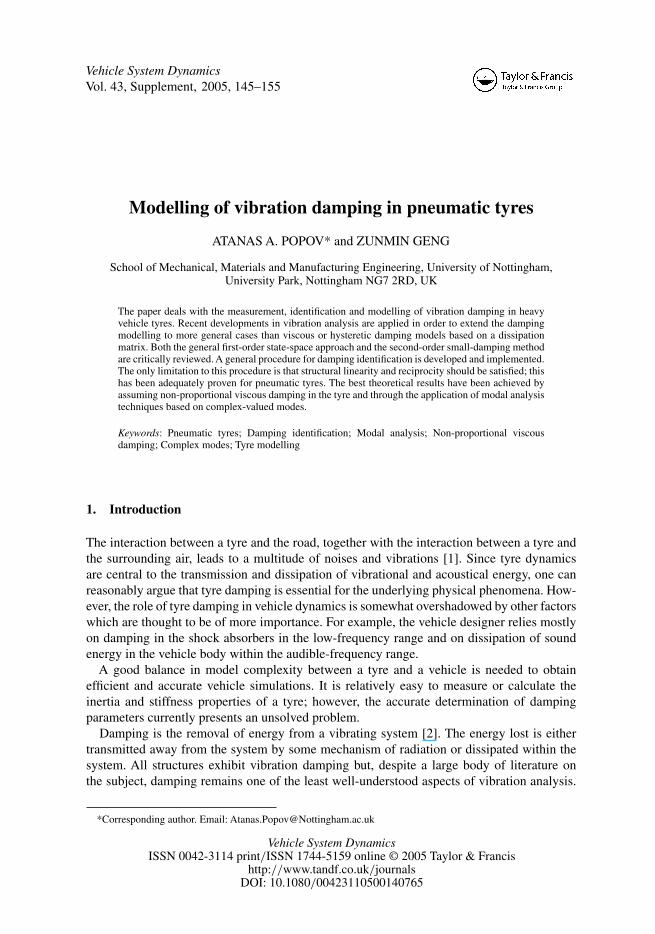
A rig for tyre testing was designed, manufactured and commissioned (figure 1). The wheelwas rigidly attached to a seismic table. The pneumatic tyre was only in contact with thewheel and could perform free vibrations in the frequency range of interest, up to 200 Hz.The experimental techniques employed were as follows: excitation by a shaker with a chirp-sweeping input [11], and measurement by accelerometer positioned at 16 equally spacedpoints along the central circumference of the tyre. During the measurements the tip of thedrive rod and the accelerometer were glued to the surface of the tyre. The excitation was
Modelling of vibration damping in pneumatic tyres 147
Figure 1. Modal testing set-up for a Dunlop truck tyre SP341 295/80R22.5: PC, personal computer.
applied in the radial direction, since only in-plane modes of tyre vibration were of interest.Simultaneous generation of excitation and acquisition of vibration response were performedthrough one National Instruments NI 4551 board [12]. The data were subsequently analysedwith purpose-written programs in MATLAB [13].
The tyre used was a conventional single truck tyre Dunlop SP341 295/80R22.5, tested underdifferent inflation pressures.
A large set of measurements was made to check for the linearity and reciprocity of tyrestructure [14, 15]. Linearity was proven by exciting the tyre with harmonic loading of differentmagnitudes. Reciprocity was observed to a sufficient accuracy on the ensemble-averagedfrequency response functions (FRFs). These initial checks for linearity and reciprocity justifieda model with a symmetric damping matrix [9].
3. Procedures of modal analysis
In modal testing and analysis (see, for example, [8, 11]), any linear system with dampingproportional only to velocities can be represented by a finite number N of degrees of freedomand a second-order differential equation of motion
[M] {x(t)} + [C] {x(t)} + [K] {x(t)} = {f (t)} , (1)
where [M], [C] and [K] are the mass, dissipation (damping) and stiffness matrices respectively,{x (t)} is the vector of generalized coordinates (radial tyre displacements in this particular case)and {f (t)} is the vector of generalized forces driving the vibration (excitation force on thetyre by the shaker).
As a preliminary step towards the general analysis it can be assumed that the dampingmatrix of the tyre can be simultaneously diagonalized with the mass and stiffness matrices,meaning that damping is taken as proportional. In this case, a standard procedure is to transformequation (1) into the frequency domain and to decouple the equations of motion through atransformation of the generalised coordinates into modal coordinates by the N × N modalmatrix [φ] = [{φ1} , {φ2} , . . . , {φN }] . Here, the matrix columns represent the mode shapesof the undamped system scaled for unit mass, or {φn}T [M] {φn} = [I ] holds with [I ] asan N × N unit matrix. Under the assumption of proportional viscous damping, the FRFscommonly employed in modal testing and analysis [8, 11] are
Hjk (ω) = Xj (ω)
Fk (ω)=
N∑n=1
φjnφkn
ω2n − ω2 + i2ζnωnω
, j, k = 1, . . . , N. (2)

148 A. A. Popov and Z. Geng
Here, the index j refers to the measurement (response) point, while the index k refers to theexcitation point. The summation is taken over all available modes N for each frequency ω ofexcitation. The aim is to measure a large set of FRFs (the left-hand side of equation (2)) inorder to obtain the modal parameters accurately: the natural frequencies ωn, the damping ratiosζn and the elements in the modal matrix [φ] scaled for unit mass. The parameter identificationis usefully conducted through the ‘curve-fitting’ approach and begins with the identificationof residues and poles in the FRFs.
Equation (2) can be also rewritten in its complex conjugate pair form in the Laplace domain:
Hjk(s) =N∑
n=1
Rjkn
s − pn
+ R∗jkn
s − p∗n
=N∑
n=1
−iφjnφkn
�n(s + σn − i�n)+ iφjnφkn
�n(s + σn + i�n), (3)
where s is the Laplace variable and the poles are pn = −ζnωn + iωn
(1 − ζ 2
n
)1/2 = −σn + i�n
and p∗n = ipn = −ζnωn − iωn
(1 − ζ 2
n
)1/2 = −σn − i�n respectively.It should be noted that under the proportional damping assumption the mode shapes in
[φ] are always vectors of real numbers. Also, when plotting phase angles derived from thecomplex-valued FRFs Hjk (ω) against the frequency ω, the phase angle shifts at resonancesare always 0◦ or ±180◦.
Supposing now that the damping matrix [C] in equation (1) is of non-proportional viscoustype; then a direct decoupling of the second-order differential equation becomes impossible. Inthis case, the first-order state-space method becomes a feasible approach for the investigation[16–18].
By grouping together the vibration displacements {x(t)} and velocities {y(t)} as a systemstate vector, the set of N second-order equations is now represented by a set of 2N first-orderequations, as follows:
[0 M
M C
]
dy(t)
dtdx(t)
dt
+
[−M 00 K
] {y(t)
x(t)
}=
{0
f (t)
}. (4)
This formulation leads to a generalized eigenvalue problem [8]
1
p
{p�
�
}=
[0 I
−K−1M −K−1C
] {p�
�
}. (5)
The solution consists of a set of 2N eigenvalues appearing in complex conjugate pairs forunderdamped systems; this means that, if pn = −σn + i�n is an eigenvalue, then p∗
n = ipn =−σn − i�n also belongs to the spectrum. The imaginary parts ±�n of pn and p∗
n represent thedamped natural frequency of each mode, while the real part −σn is related to the half-powerbandwidth of the mode (a measure of modal damping). The corresponding eigenvectors to theeigenvalues pn and p∗
n, are also complex conjugate and have the form
{�n} ={{�n}pn
{�n}
}and {�N+n} =
{{�∗n}p∗
n
{�∗n}
}, n = 1, . . . , N, (6)
where {�n} and {�∗n} are N -dimensional complex conjugate eigenvectors corresponding to
the displacements {x}.In a similar way to the classical modal interpretation with real eigenvectors when decoupling
the equations of motions, the matrix [�] = [{�1} , . . . , {�2N }] (without any particular scaling)

Modelling of vibration damping in pneumatic tyres 149
represents a transformation between modal and physical coordinates; that is,
{y (t)
x (t)
}= [�]
{q (t)
q∗ (t)
},
and equation (4) is in modal coordinates
[�]T
[0 M
M C
][�]
dq(t)
dt
dq∗(t)dt
+ [�]T
[−M 00 K
][�]
{q(t)
q∗(t)
}= [�]T
{0
f (t)
}. (7)
However, the pair consisting of the displacement vector {�n} and the pole pn can also becalled a complex mode without any loss of information, since this mode fully characterizesthe complex eigenvectors {�n} and {�N+n} as shown by equation (6).
Two orthogononality conditions are necessary and sufficient for the set of 2N vectors,formed by {�n} and {�N+n}, and 2N poles pn and p∗
n to be the complete set of complexmodes for a model with N degrees of freedom:
{�n}T
[0 M
M C
]{�n} = {�n}T [C] {�n} + pn{�n}T [M] {�n} + {�n}T [M] {�n}pn = an,
(8a)
{�n}T
[−M 00 K
]{�n} = {�n}T [K] {�n} − pn{�n}T [M] {�n}pn = bn, (8b)
with a∗n and b∗
n calculated in the same way.For the decoupled first-order differential equation (7), the nth and (N + n)th modes can be
solved from
an
dqn
dt+ bnqn = {�n}T {f (t)} , a∗
n
dq∗n
dt+ b∗
nq∗n = {�∗
n}T {f (t)} . (9)
Thus, one ends up with a set of 2N decoupled equations, and this is equivalent to having aset of independent 2N single-degree-of-freedom systems. The frequencies and damping forthese oscillators are governed by pn = −bn/an and p∗
n = −b∗n/a
∗n .
By applying standard techniques of analysis, such as the Duhamel convolution integralsand/or Laplace transforms [11, 18], a full set of transfer functions can be derived and usefullywritten in the matrix form
[H(s)] =N∑
n=1
(Rn
s − pn
+ R∗n
s − p∗n
)
=N∑
n=1
( {�n}{�n}T
an
1
s − pn
+ {�∗n}{�∗
n}T
a∗n
1
s − p∗n
)
=N∑
n=1
( {ψn}{ψn}T
s − pn
+ {ψ∗n }{ψ∗
n }T
s − p∗n
). (10)
In the particular case of proportional damping with the introduced scaling of complex modes,this general procedure leads to {ψn} = {
ψ∗n
} = {φn} with an = 2iωn and a∗n = −2iωn, and

150 A. A. Popov and Z. Geng
the FRFs are the same as those described by equation (2):
[H(ω)] =N∑
n=1
{φn} {φn}T
ω2n − ω2 + i2ζnωnω
. (11)
Equation (10) can be implemented within an optimization procedure with experimentallymeasured FRF data in order to derive a full set of modal parameters. The derivation obeysthe orthogonality conditions of the complex modal theory and corresponds to a particularsituation: the unit-mass normalization of real modes.
Further considering equation (1) with general viscous damping, its second-order eigen-problem is
det(−λ2 [M] + iλ [C] + [K]
) = 0. (12)
Under a small-damping assumption (e.g. a damping ratio of less than 5%), the roots ofequation (12), namely the complex eigenvalues λn, are close to the undamped eigenvaluesωn, and the complex eigenvectors {ψn} are also close to the undamped modal vectors {φn}.Thus, a solution for the eigenvalues can be obtained in the form [3, 9]
{ψn} =N∑
k=1
α(n)k {φk} , α(n)
n = 1 and∣∣∣α(n)
k
∣∣∣ � 1 ∀ k �= n. (13)
One should note that the scaling chosen for the eigenvectors is of particular importance here;this fact has not been given sufficient attention in earlier work [9]. Substituting the complexnormal mode {ψn} and λn back into the equation of motion and applying the orthogonalityproperties of the undamped modes {φn}, one has
−λ2nα
(n)k + iλn
N∑j=1
α(n)j C ′
kj + ω2kα
(n)k = 0, C ′
kj = {φk}T [C]{φj
}. (14)
For k = n, equation (14) yields for the eigenvalues
−λ2n + iλnC
′nn + ω2
n ≈ 0, λn ≈ ±ωn + iC ′nn
2, (15)
while, for k �= n, it gives for the complex modes
α(n)k ≈ iωnC
′kn
ω2n − ω2
k
, {ψn} ≈ {φn} + iN∑
k=1k �=n
ωnC′kn
ω2n − ω2
k
{φk}. (16)
Equation (14) can be also rewritten as [14]
−λ2nα
(n)k + iλn
α(n)
n C ′kn + α
(n)k C ′
kk +N∑
j �=k �=n
α(n)j C ′
kj
+ ω2
kα(n)k = 0. (17)
This leads for the modes to
α(n)k ≈ − iλnC
′kn
ω2k − λ2
n + iλnC′kk
≈ iλnC′kn
(λn − λk)(λn + λ∗k)
,
{ψn} ≈ {φn} + iN∑
k=1k �=n
λnC′kn
(λn − λk)(λn + λ∗k)
{φk}. (18)
Modelling of vibration damping in pneumatic tyres 151
The relationship between undamped (real) and complex modes within the small non-proportional viscous damping assumption originated by Rayleigh [3] is known as Rayleigh’ssmall-damping assumption. Some important conclusions can be drawn from equations(15) and (18).
(i) The eigenvalues λn employed in the second-order approximation are different from theeigenvalues pn obtained by the first-order derivation. However, based upon Rayleigh’ssmall-damping assumption, an approximate relationship between the two sets of eigen-values holds, namely pn ≈ iλn. Equation (15) shows that the damped natural frequenciesdepend, to this order of approximation, on the diagonal terms of the damping matrix innormal coordinates.
(ii) As shown by equations (18), the real part {ψn} of the complex eigenvectors equals theundamped modes {φn}, while the imaginary part is purely caused by the arbitrarily dis-tributed damping. As a complex-valued contribution to the eigenvector, the off-diagonalterms of the transformed damping matrix
[C ′] exert a dominant influence upon the
imaginary part of the eigenvector.
4. Results and discussion
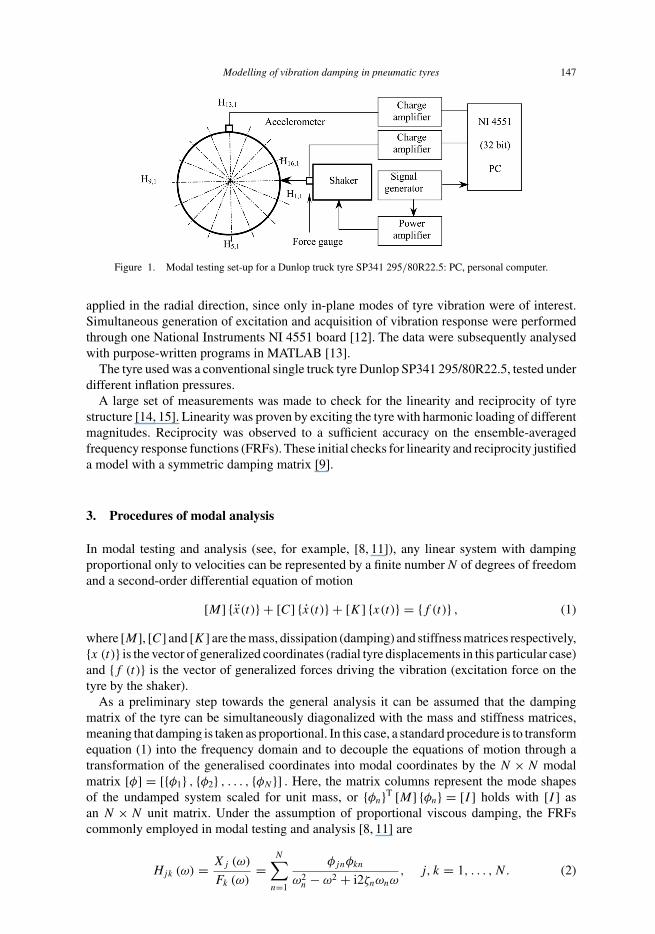
By employing equation (3) in the pole-pair optimization procedure [11, 19], the FRFs andin-plane mode shapes of tyre vibration are identified. Figure 2 shows the real and imaginaryparts, the amplitudes and the phases of measured data (solid curves) and a fitted FRF (dottedcurves) at a tyre inflation pressure of 7.5 bar. All tyre resonances involving in-plane bendingof the tread band are revealed within the frequency range from 0 to 200 Hz. There are impor-tant discrepancies between measured and fitted data in the range between 140 and 200 Hz.Moreover, deviations in the phase–frequency characteristics of the FRF from the proportionaldamping assumption are observed at resonances (see [14, 15] for more details), namely forphase angles between 0◦ and ±180◦. This proves the need for more general procedures ofdamping identification, based upon complex modes.
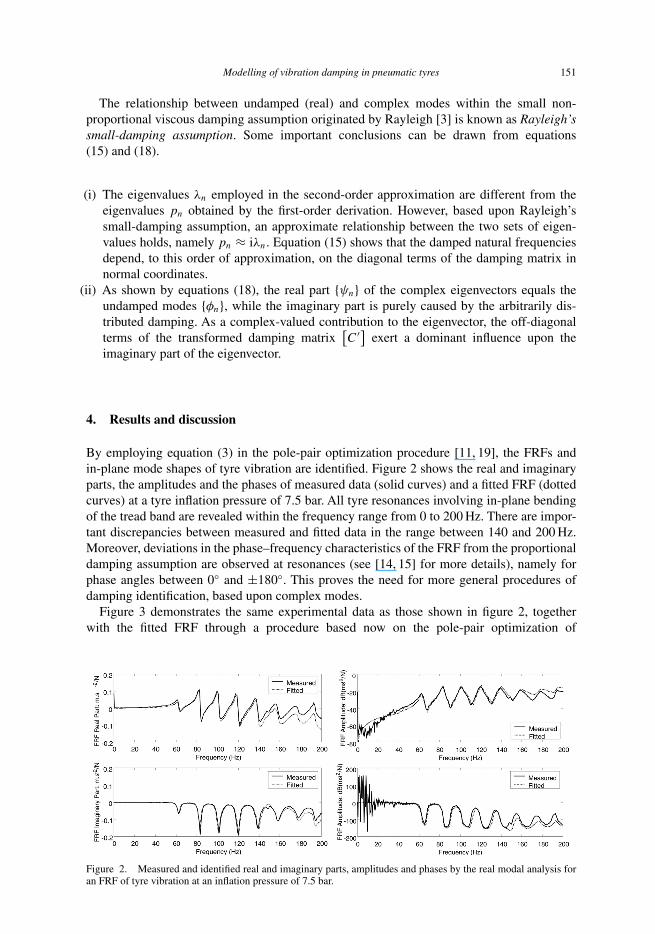
Figure 3 demonstrates the same experimental data as those shown in figure 2, togetherwith the fitted FRF through a procedure based now on the pole-pair optimization of
Figure 2. Measured and identified real and imaginary parts, amplitudes and phases by the real modal analysis foran FRF of tyre vibration at an inflation pressure of 7.5 bar.
152 A. A. Popov and Z. Geng
Figure 3. Measured and identified real and imaginary parts, amplitudes and phases by the complex modal analysisfor an FRF of tyre vibration at an inflation pressure of 7.5 bar.
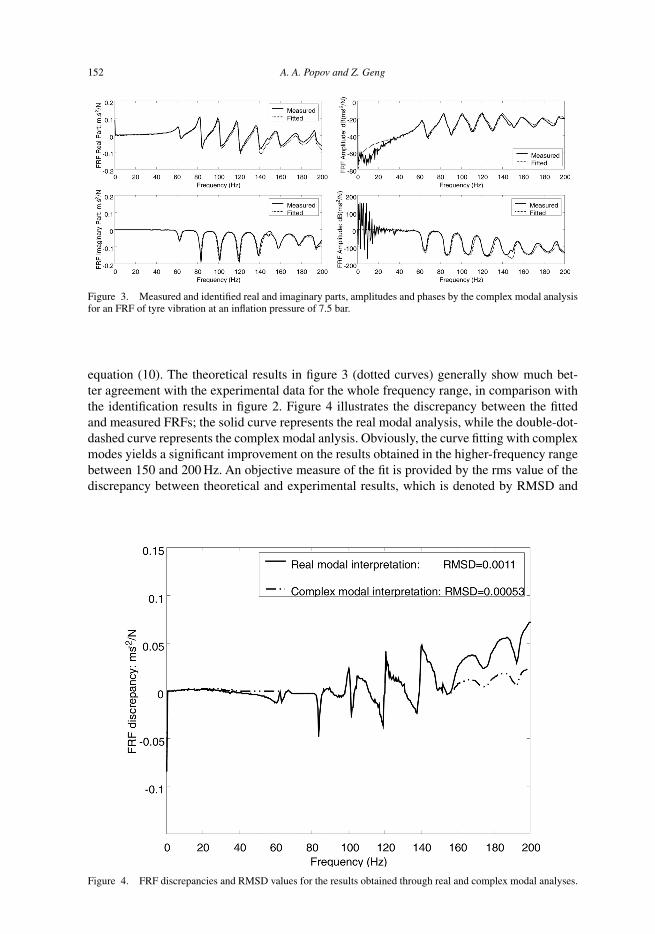
equation (10). The theoretical results in figure 3 (dotted curves) generally show much bet-ter agreement with the experimental data for the whole frequency range, in comparison withthe identification results in figure 2. Figure 4 illustrates the discrepancy between the fittedand measured FRFs; the solid curve represents the real modal analysis, while the double-dot-dashed curve represents the complex modal anlysis. Obviously, the curve fitting with complexmodes yields a significant improvement on the results obtained in the higher-frequency rangebetween 150 and 200 Hz. An objective measure of the fit is provided by the rms value of thediscrepancy between theoretical and experimental results, which is denoted by RMSD and
Figure 4. FRF discrepancies and RMSD values for the results obtained through real and complex modal analyses.
Modelling of vibration damping in pneumatic tyres 153
given by
RMSD = 1
m
(m∑
i=1
∣∣H th (i) − H exp (i)∣∣2
)1/2
, (19)
where the summation is over all available discrete points within the range from 0 to 200 Hz,and m is the total number of points. Equation (19) gives RMSD = 0.0011 for real modesand a lower value of 0.000 53 for the procedure based upon complex modes. Obviously, theapplication of complex modes within the non-proportional viscous damping context offers abetter description of the system damping than the real modal analysis approach does.
Further analysis, not presented here but given in [15], reveals that the real and imaginaryparts of the complex modal matrix [�], obtained from the identification with tyre vibra-tion data, are nearly proportional to each other; this means that the complex modes can beapproximately transformed into equivalent real modes by changing the phases in the solution.This demonstrates that the tyre damping is not far from proportional; however, for an accu-rate description of the damping properties, one should apply the general procedure based oncomplex modes, as justified by the presented analysis.
The application of Rayleigh’s small-damping approximation, as derived in equations (15)and (18), proves to be a useful tool for the implementation of a step-by-step procedure forthe identification of damping in tyres and the derivation of the corresponding dissipationmatrix [15]. One problem that needed special attention here concerned the incompletenessof modal data from experiments. In modal analysis, there is a transformation between thedamping matrix in modal coordinates and the damping matrix in physical coordinates. Ifcomplete modes were obtained from experiments, then the modal matrix would be a squarematrix, and the damping matrix in physical coordinate could be easily obtained by inversetransformation. However, in practice the experimental modes are often incomplete, and as aresult the modal matrix is not a square matrix. In this case, the modes are truncated and a sort ofpower-leakage phenomenon is unavoidable. Based upon this consideration, a pseudo-inversetransform was introduced in order to evaluate the damping matrix in physical coordinates andat the same time to improve the effects from the modal truncation.
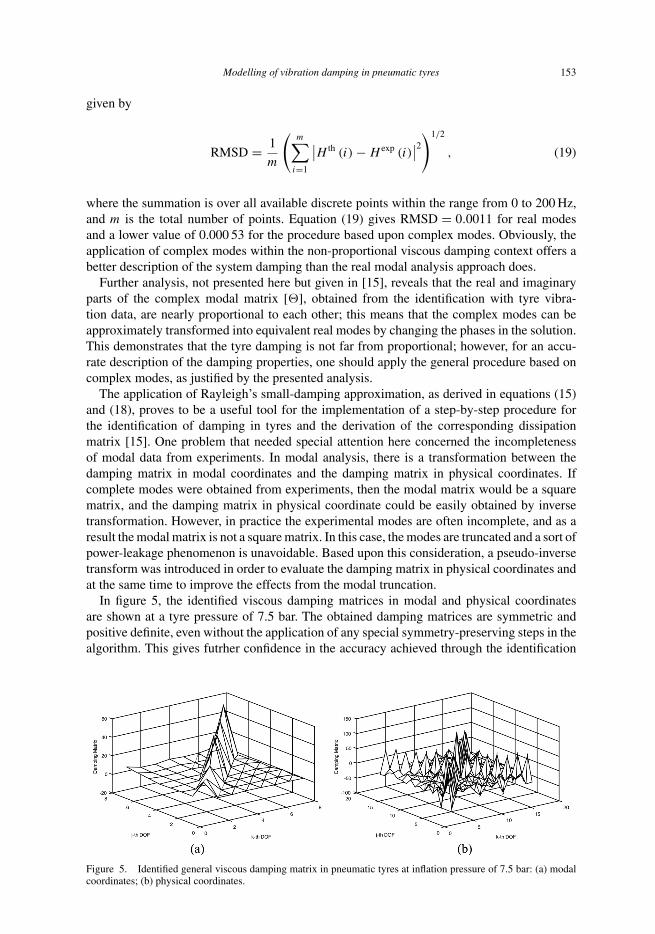
In figure 5, the identified viscous damping matrices in modal and physical coordinatesare shown at a tyre pressure of 7.5 bar. The obtained damping matrices are symmetric andpositive definite, even without the application of any special symmetry-preserving steps in thealgorithm. This gives futrher confidence in the accuracy achieved through the identification
Figure 5. Identified general viscous damping matrix in pneumatic tyres at inflation pressure of 7.5 bar: (a) modalcoordinates; (b) physical coordinates.
154 A. A. Popov and Z. Geng
procedure. The negative damping distribution in some of the physical coordinates can beattributed to the incompleteness of the modal information. Physically, the phenomenon canbe identified as power leakage.
5. Conclusions
The following conclusions can be drawn.
(i) A test rig facility for measuring the vibration of truck tyres has been developed. Extensiveset of measurements of vibration in truck tyres has been made.
(ii) Both the general first-order state-space approach and the second-order small-dampingmethod have been critically reviewed and applied.
(iii) An appropriate method for normalization (scaling) of complex eigenvectors has beenused for damping identification in pneumatic tyres. This method is of importance forfurther studies into general viscous and non-viscous damping models.
(iv) Based upon the interpretation of complex mode shapes and the normalization procedure,an improved expression for the FRFs in the small-damping case (second-order systemsof differential equations) has been proposed. It was validated through the experimentaldata for the tyre.
(v) A new general procedure (algorithm) for damping identification has been developed andimplemented. The only limitation to this procedure is that linearity and reciprocity shouldbe verified to sufficient accuracy.
Acknowledgements
This work was supported by a grant from the Engineering and Physical Sciences ResearchCouncil of the UK. The authors are grateful to Dr D.J. Cole from the University of Cambridgefor valuable advice and discussions.
References
[1] Pottinger, M.G., Marshall, K.D., Lawther, J.M. and Thrasher, D.B., 1986, A review of tyre/pavement interactioninduced noise and vibration. In: M.G. Pottinger and T.J.Yager (Eds) The Tyre Pavement Interface, ASTP SpecialTechnical Publication 929 (Philadelphia, PA: American Society for Testing and Materials), pp. 183–287.
[2] Crandall, S.H., 1970, The role of damping in vibration theory. Journal of Sound and Vibration, 11, 3–18.[3] Lord Rayleigh, 1945, Theory of Sound, 2nd edition, reissue (New York: Dover Publications).[4] Clark, S.K., 1981, Mechanics of Pneumatic Tires, 2nd edition (Washington, DC: US Department of Transport).[5] Stutts, D.S. and Soedel, W., 1992, A simplified dynamic model of the effect of internal damping on the rolling
resistance in pneumatic tires. Journal of Sound and Vibration, 155, 153–164.[6] Williams, R.A., 1997, Automotive active suspensions. Part 1: basic principles. Proceedings of the Institution of
Mechanical Engineers, Part D: Journal of Automobile Engineering, 211, 415–426.[7] Zaremba,A., Hampo, R. and Hrovat, D., 1997, Optimal active suspension design using constrained optimization.
Journal of Sound and Vibration, 207, 351–364.[8] Maia, N.M.M. and de Silva, J.M.M. (Eds), 1997, Theoretical and Experimental Modal Analysis (Baldock,
Hertfordshire: Research Studies Press).[9] Woodhouse, J., 1998, Linear damping models for structural vibration. Journal of Sound and Vibration,
215, 547–569.[10] Adhikari, S. and Woodhouse, J., 2001, Identification of damping. Part 1: viscous damping. Journal of Sound
and Vibration, 243, 43–61.[11] Ewins, D.J., 2000, Modal Testing: Theory, Practice and Application, 2nd edition (Baldock, Hetrfordshire:
Research Studies Press).[12] National Instruments, 2002, The Measurement and Automation Catalog (Austin, TX: National Instruments).[13] 2002, MATLAB Version 6, The Language of Technical Computing (Natick, MA: The MathWorks Inc.).
Modelling of vibration damping in pneumatic tyres 155
[14] Geng, Z., Popov, A.A. and Cole, D.J., 2002, Modelling of vibration damping in pneumatic tyres: appropri-ate interpretation of complex modes. Proceedings of the International Conference on Noise and VibrationEngineering, Leuven, Belgium, 16–18 September, pp. 485–494.
[15] Geng, Z., Popov,A.A. and Cole, D.J., 2004, Measurement, identification and modelling of damping in pneumatictyres. (submitted).
[16] Balmès, E., 1997, New results on the identification of normal modes from experimental complex modes.Mechanical Systems and Signal Processing, 11, 229–243.
[17] Garvey, S.D., Penny, J.E.T. and Friswell, M.I., 1998, The relationship between the real and imaginary parts ofcomplex modes. Journal of Sound and Vibration, 212, 75–83.
[18] Ibrahim, S.R. and Sestieri, A., 1995, Existence and normalization of complex modes in post experimental usein modal analysis. Proceedings of the 13th International Modal Analysis Conference, Vol. 1, Nashville, TN,pp. 483–489.
[19] Lang, G.F., 1989, Demystifying complex modes. Sound and Vibration, 36–40.
Related Documents











