Modelling negative interactions among pedestrians in high density situations Stefania Bandini, Matteo Mondini, Giuseppe Vizzari ⇑ Complex Systems and Artificial Intelligence Research Center, University of Milano–Bicocca, Viale Sarca 336/14, 20126 Milano, Italy article info Article history: Received 17 May 2012 Received in revised form 8 October 2013 Accepted 13 December 2013 Keywords: Agent-based simulation Pedestrian simulation abstract Situations characterised by the presence of a high density of pedestrians involved in neg- ative interactions (e.g. flows in opposite directions) often represent a problematic scenario for simulation models, especially those taking a discrete approach to the representation and management of spatial aspects of the environment. While these situations can be rel- atively infrequent, and even if architects, event organisers and crowd managers actually try to prevent them as much as possible, they simply cannot be neglected and they actually represent interesting situations to be analysed by means of simulation. The paper presents specific extensions to a floor-field Cellular Automata pedestrian model that are specifically aimed at supporting the simulation of high density situations comprising negative interac- tions among pedestrians without incurring in the traditional limits of discrete approaches. The models are formally described and experimented in experimental and real world situations. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction The modelling and simulation of pedestrians and crowds is a consolidated and successful application of research results in the more general area of computer simulation of complex systems. Results of different approaches from researchers in different disciplines, from physics and applied mathematics, to computer science, often influenced by (and sometimes in col- laboration with) anthropological, psychological, sociological studies and the humanities in general, can be found in the lit- erature. The level of maturity of approaches developed in this application area was sufficient to lead to the design and development of commercial software packages, offering advanced functionalities for the end user (e.g. CAD integration, CAD-like functionalities, advanced visualisation and analysis tools) in addition to a simulation engine. 1 Despite the fact that current models and tools already support useful analyses supporting decision making activities, a recent survey of the field (Schadschneider et al., 2009) and a report commissioned by the UK Cabinet Office (Challenger et al., 2009) clarify that it is pos- sible to devise innovations in models improving their performances in terms of effectiveness in modelling pedestrians and crowd phenomena, expressiveness of the models (i.e. simplifying the modelling activity or introducing the possibility of representing phenomena that were still not modelled by existing approaches), or simply efficiency of the simulation tools. Situations characterised by the presence of a locally high density of pedestrians possibly involved in negative interactions (e.g. flows in opposite directions, but also different types of pedestrians, some of them standing and waiting, some others trying to move towards their goals) often represent a problematic scenario for simulation models, especially those taking a discrete approach to the representation and management of spatial aspects of the environment. While these situations can be relatively infrequent, and even if architects, event organisers and crowd managers actually try to prevent them as much as possible, they cannot be neglected and, due to their potentially problematic nature (please note that we will not 0968-090X/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.trc.2013.12.007 ⇑ Corresponding author. Tel.: +39 02 64487865; fax: +39 02 64487839. E-mail address: [email protected] (G. Vizzari). 1 see http://www.evacmod.net/?q=node/5 for a wide list of pedestrian simulation models and tools. Transportation Research Part C 40 (2014) 251–270 Contents lists available at ScienceDirect Transportation Research Part C journal homepage: www.elsevier.com/locate/trc

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Transportation Research Part C 40 (2014) 251–270
Contents lists available at ScienceDirect
Transportation Research Part C
journal homepage: www.elsevier .com/locate / t rc
Modelling negative interactions among pedestrians in highdensity situations
0968-090X/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.trc.2013.12.007
⇑ Corresponding author. Tel.: +39 02 64487865; fax: +39 02 64487839.E-mail address: [email protected] (G. Vizzari).
1 see http://www.evacmod.net/?q=node/5 for a wide list of pedestrian simulation models and tools.
Stefania Bandini, Matteo Mondini, Giuseppe Vizzari ⇑Complex Systems and Artificial Intelligence Research Center, University of Milano–Bicocca, Viale Sarca 336/14, 20126 Milano, Italy
a r t i c l e i n f o a b s t r a c t
Article history:Received 17 May 2012Received in revised form 8 October 2013Accepted 13 December 2013
Keywords:Agent-based simulationPedestrian simulation
Situations characterised by the presence of a high density of pedestrians involved in neg-ative interactions (e.g. flows in opposite directions) often represent a problematic scenariofor simulation models, especially those taking a discrete approach to the representationand management of spatial aspects of the environment. While these situations can be rel-atively infrequent, and even if architects, event organisers and crowd managers actually tryto prevent them as much as possible, they simply cannot be neglected and they actuallyrepresent interesting situations to be analysed by means of simulation. The paper presentsspecific extensions to a floor-field Cellular Automata pedestrian model that are specificallyaimed at supporting the simulation of high density situations comprising negative interac-tions among pedestrians without incurring in the traditional limits of discrete approaches.The models are formally described and experimented in experimental and real worldsituations.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
The modelling and simulation of pedestrians and crowds is a consolidated and successful application of research resultsin the more general area of computer simulation of complex systems. Results of different approaches from researchers indifferent disciplines, from physics and applied mathematics, to computer science, often influenced by (and sometimes in col-laboration with) anthropological, psychological, sociological studies and the humanities in general, can be found in the lit-erature. The level of maturity of approaches developed in this application area was sufficient to lead to the design anddevelopment of commercial software packages, offering advanced functionalities for the end user (e.g. CAD integration,CAD-like functionalities, advanced visualisation and analysis tools) in addition to a simulation engine.1 Despite the fact thatcurrent models and tools already support useful analyses supporting decision making activities, a recent survey of the field(Schadschneider et al., 2009) and a report commissioned by the UK Cabinet Office (Challenger et al., 2009) clarify that it is pos-sible to devise innovations in models improving their performances in terms of effectiveness in modelling pedestrians and crowdphenomena, expressiveness of the models (i.e. simplifying the modelling activity or introducing the possibility of representingphenomena that were still not modelled by existing approaches), or simply efficiency of the simulation tools.
Situations characterised by the presence of a locally high density of pedestrians possibly involved in negative interactions(e.g. flows in opposite directions, but also different types of pedestrians, some of them standing and waiting, some otherstrying to move towards their goals) often represent a problematic scenario for simulation models, especially those takinga discrete approach to the representation and management of spatial aspects of the environment. While these situationscan be relatively infrequent, and even if architects, event organisers and crowd managers actually try to prevent them asmuch as possible, they cannot be neglected and, due to their potentially problematic nature (please note that we will not

252 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
deal with panic conditions, a situation sometimes studied through analogies with animal behaviour as discussed byShiwakoti et al. (2011)), they actually represent interesting situations to be analysed by means of simulation.
In order to clarify what do we mean by high density situation, the most important observation about the effect of densityon the movement of pedestrians must be introduced: the so called fundamental diagram (Schadschneider et al., 2009) showshow the average velocity of pedestrians in a section (e.g. one of the ends of a corridor) varies according to the density of theobserved environment. Since the flow of pedestrians is directly proportional to their velocity, this diagram is sometimes pre-sented in an equivalent form that shows the variation of flow according to the density. In general, we expect to have a de-crease in the velocity when density grows; the flow, instead, initially grows, since it is also directly proportional to thedensity, until a certain threshold value is reached (also called critical density), then it decreases. Despite being of great rel-evance, different experiments gathered different values of empirical data. Consensus on the shape of the function is wide, butthe range of the possible values has even big differences from different versions, as you can see in Fig. 1 showing a set ofdifferent diagrams, both lines related to design manuals (Weidmann, 1993 and Predtechenskii and Milinskii, 1978) and alsodata points related to experimental measurements (respectively carried out in the context of the Hajj in Saudi Arabia byHelbing et al. (2007) and in the city of Osaka, in Japan, by Mori and Tsukaguchi (1987)). The differences might be due tothe fact that the observation contexts are different, and it is well known that there are cultural differences influencing thesemeasurements (as initially and generally discussed by Hall (1966) and later on confirmed by Chattaraj et al. (2009) withspecific reference to the fundamental diagram).
The maximum possible value for density before severe congestions arise is also disputed. In the several versions of thefundamental diagram presented, this value ranges between 3:8 m2 and 10 m2, that is more than double. Zafar (2011) reportsdensities of 8 m�2 during the Tawaf, one of the Islamic rituals of pilgrimage, and in general values higher than 6:25 m�2, thatis the actual limit of most modelling approaches characterised by a discrete representation of the environment, like CellularAutomata (CA) models, are reported to be found, especially in case of unidirectional pedestrian flows.
If there is no consensus on the precise plausible range for density values, it is even more difficult to define whatdoes the term ‘‘high’’ density mean. In the Cellular Automata model proposed by Henein and White (2007) a high-density crowd is defined as a set of pedestrians without empty cells between them (thus a value of density around6:25 m�2, given the cell size of 40 cm� 40 cm). It must be noted that, in case of negative interactions (e.g. counterflows), with pedestrians trying to move in opposite directions, even lower densities can represent a problematic sit-uation to be managed by CA models. The present paper presents specific extensions to a basic floor-field (Bursteddeet al., 2001) CA pedestrian model that are specifically aimed at supporting the simulation of high density situationscomprising negative interactions among pedestrians without incurring in the traditional limits of discrete approaches:the extensions explore, on the one hand, the possibility to transiently allow the possibility of a cell to host morethan one pedestrian and, on the other, a finer grained spatial representation, with smaller cells and (consequently)pedestrians that occupy more than a single cell. The rationale of both approaches is to allow the environment toaccommodate more pedestrians that those that could be hosted according to the traditional discretisation (40 cmsided cells, each occupied by at most one pedestrian). The results presented in the paper will show how this possi-bility allows the model to reproduce some of the phenomena that can be observed in high density situations inwhich individuals are involved in negative interactions.
The following Section will present a brief state of the art on pedestrian and crowd modelling approaches. Section 3introduces the basic model, derived by literature on floor-field CA models, employed as a starting point for this re-search; its extensions will then be formally described and discussed. Results of the application of these models inexperimental and real-world scenarios will be described in Section 5. Conclusions and future developments willend the paper.
Fig. 1. Empirical fundamental diagrams for pedestrian movement in planar facilities as reported by design manuals (Weidmann, 1993 – WM – and –Predtechenskii and Milinskii, 1978 – PM) and also data points related to experimental measurements (respectively carried out in the context of the Hajj inSaudi Arabia by Helbing et al. (2007) and in the city of Osaka, in Japan, by Mori and Tsukaguchi (1987) – MT).

S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 253
2. Pedestrians and crowd modelling approaches
The aim of this section is to provide a compact overview of the different approaches to the representation and simulationof crowd dynamics. Dedicated workshops and conferences attracting researchers from different disciplines are focused onthis topic (see, e.g., the proceedings of the first edition of the International Conference on Pedestrian and Evacuation Dynam-ics (Schreckenberg and Sharma, 2001) and consider that this event will reach the seventh edition in 2014), therefore we canonly try to report the most significant and representative approaches and models. We will focus on microscopic models, thatare trying to characterise and define individual behavioural rules whose application leads to the generation of the overallsystem behaviour. Nonetheless, relevant macroscopic models, trying to characterise the overall flow of pedestrians, mightrepresent a viable alternative when large crowds of pedestrians are being analysed and the individual differences are notso important for the goals of the study (Xia et al., 2009).
Microscopic pedestrian models can be organised into broad classes identified according to the way pedestrians are rep-resented and managed, and in particular: (i) pedestrians as particles subject to forces of attraction/repulsion, (ii) pedestriansas particular states of cells in a CA, (iii) pedestrians as autonomous agents, situated in an environment.
2.1. Particle-based approach
A significant number of models and experiences of simulation of pedestrian dynamics are based on an analytical ap-proach, considering pedestrian as particles subject to forces, and representing in this was the various forms of interactionbetween pedestrian and the environment (and also among pedestrians themselves, in the case of active walker models Hel-bing et al. (1997)). These models are intrinsically characterised by a continuous representation of both space and time. Forcesof attraction lead the pedestrians/particles towards their destinations, whereas forces of repulsion are used to represent thetendency to stay at a distance from other points of the environment. This kind of effect was introduced by a relevant andsuccessful example of this modelling approach, the social force model introduced by Helbing and Molnár (1995); this ap-proach introduces the notion of social force, representing the tendency of pedestrians to stay at a certain distance one fromanother; other relevant approaches take inspiration from fluid-dynamic (Helbing, 1992) and magnetic forces (Okazaki, 1979)for the representation of mechanisms governing flows of pedestrians.
While this approach is based on a precise methodology and has provided extremely significant results, it represents pe-destrian as mere particles, whose goals, characteristics and interactions must be represented by means of equations, and it isnot simple thus to incorporate heterogeneity and complex pedestrian behaviours in this kind of model. Nonetheless, recentextensions of the basic social force model introduce a contribution to the general laws of motion representing a form of cohe-sion between members of a group (Moussaïd et al., 2010; Xu and Duh, 2010): the authors of these works focus on smallunstructured groups and they analyse the impact of this modification to the starting model in low to moderate densityscenarios.
Finally, developments of this approach preserving a continuous representation of space and time, take a different per-spective on the representation of the physical nature of pedestrians: even though pedestrians are self-driven as opposedto gravity-driven, models for granular flow in bottlenecks can be adapted to represent features of pedestrian dynamics likethoracic shape, shoulder rotation (Chen et al., 2013), although the microscopic results of this kind of model still call for aproper validation.
2.2. Cellular automata approach
A different approach to crowd modelling is characterised by the adoption of Cellular Automata (CA), with a discrete spa-tial representation and discrete time-steps, to represent the simulated environment and the entities it comprises. The cel-lular space includes both a representation of the environment and an indication of its state, in terms of occupancy of thesites it is divided into, by static obstacles or pedestrians. Transition rules must be defined in order to specify the evolutionof every cell’s state; they are based on the concept of neighbourhood of a cell, a specific set of cells whose state will be con-sidered in the computation of the transition rule. This kind of application of CA-based models is essentially based on previousworks adopting the same approach for traffic simulation (in particular, Nagel and Schreckenberg (1992) and its derivatives).
Local cell interactions are thus the uniform (and only) way to represent the decisions and movement of an individual inthe environment. The sequential application of this rule to the whole cell space may bring to emergent effects and collectivebehaviours such as the formation of lanes in bidirectional pedestrian flows Blue and Adler (1999) or the resolution of con-flicts in multidirectional crossing pedestrian flows Blue and Adler (2000). In this kind of example, an ad hoc rule comprisesbranches associated to specific pedestrian flows (e.g. pedestrians moving towards different ends of a corridor). More generalapproaches to the representation of goal driven behaviours (i.e. the desire to reach certain positions in space) have led toextend the basic CA model to include features and mechanisms breaking the strict locality principle. The most importantexample of this kind of development is represented by the floor-field approach Burstedde et al. (2001). In this case, the cel-lular structure of the environment is also characterised by a predefined desirability level associated to each cell (static floorfield) that, combined with more dynamic effects generated by the passage of other pedestrians (dynamic floor fields), guidesthe transition of states associated to pedestrians. Recent developments of this approach introduce even more sophisticated

254 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
behavioural elements for pedestrians, considering the anticipation of the movements of other pedestrians, especially incounter flows scenarios Suma et al. (2012).
It must be noted that the discrete nature of the implies intrinsic limits to the possibility of managing in a realistic wayhigh-density situations; Kirchner et al. (2004) provided a comprehensive analysis of these effects also exploring the possi-bility of reducing cell size and allowing walking speeds higher than 1 cell per simulation turn. This kind of study, coupledwith comprehensive actual observations (like the one described by Hoogendoorn and Daamen (2005)) actually representa significant line of work towards the actual definition of discrete approaches that can actually be adopted in the widestpossible set of situations and crowding scenarios.
2.3. Autonomous agents approach
Recent developments in this line of research (e.g. Henein and White, 2005; Dijkstra et al., 2006), introduce modificationsto the basic CA approach that are so deep that the resulting models can be considered much more similar to agent-based andMulti Agent Systems (MAS) models exploiting a cellular space representing spatial aspects of agents’ environment. A MAS isa system made up of a set of autonomous components which interact, for instance according to collaboration or competitionschemes, in order to contribute in realising an overall behaviour that could not be generated by single entities by themselves.As previously introduced, MAS models have been successfully applied to the modelling and simulation of several situationscharacterised by the presence of autonomous entities whose action and interaction determines the evolution of the system,and they are growingly adopted also to model crowds of pedestrians Batty (2001), Gloor et al. (2004), Toyama et al. (2006),Bandini et al. (2007). All these approaches are characterised by the fact that the agents encapsulate some form of behaviourinspired by the above described approaches, that is, forms of attractions/repulsion generated by points of interest or refer-ence in the environment but also by other pedestrians, but most of them extend the basic modelling approaches to realisemore complicated behavioural models.
Some of the agent based approaches to the modelling of pedestrians and crowds were developed with the primary goal ofproviding a realistic 3D visualisation of the simulated dynamics: in this case, the notion of realism includes elements that areconsidered irrelevant by some of the previous approaches, and it does not necessarily require the models to be validatedagainst data observed in real or experimental situations. The approach described in Musse and Thalmann (2001) and in Shaoand Terzopoulos (2007) is characterised by a very composite model of pedestrian behaviour, including basic reactive behav-iours as well as a cognitive control layer; moreover, actions available to agents are not strictly related to their movement, butthey also allow forms of direct interaction among pedestrians and interaction with objects situated in the environment.Other approaches in this area (see, e.g., Paris and Donikian, 2009) also define layered architectures including cognitive mod-els for the coordination of composite actions for the manipulation of objects present in the environment. Another relevantagent-based effort described in Patil et al. (2011), although adopting the social force model for some internal mechanisms(i.e. local collision avoidance), employs guidance fields to achieve a goal directed agent movement.
It must be noted an already mentioned work by Henein and White (2007) employs an agent-based approach to investi-gate issues related to high-density situations, in particular considering evacuation from a room through a bottleneck: in thiscase, however, authors consider the effects of high-density in terms of injuries to involved pedestrians.
3. The basic model: description and peculiarities
This section presents the basic pedestrian model we defined for investigating high-density situations. The model is essen-tially based on the floor-field approach, nonetheless, for simplicity, we will adopt the agent term to discuss the behaviour ofpedestrians.
3.1. Environment
The physical environment is represented by a discrete grid of square cells, as in the floor field model, with cell size of40cm� 40cm.
Env ¼ fc0; c1; c2; c3; . . .g 8ci : ci 2 Cell
Every cell has a row and a column index, which indicates its position in the grid.
RowðciÞ : Cell! N
ColðciÞ : Cell! N
We can refer to a cell also by indicating its row and column on the grid, with the following notation:
Env j;k ¼ c : c 2 Env ^ ðRowðcÞ ¼ jÞ ^ ðColðcÞ ¼ kÞ
Every cell is connected to other cells according to a neighbourhood function. In the basic model we assume the Moore neigh-bourhood, that includes all the cells surrounding the cell being considered, even in diagonal directions. However, we main-tain separate the two subsets of neighbours (orthogonal cells, also called Von Neumann neighbourhood, and diagonal cells)

S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 255
because pedestrians treat differently the two cases in calculating utilities and in other tasks. To indicate neighbours we usecardinal points.
NðEnv j;kÞ ¼ Env jþ1;k; SðEnv j;kÞ ¼ Env j�1;k
EðEnv j;kÞ ¼ Env j;kþ1; WðEnv j;kÞ ¼ Env j;k�1
NEðEnv j;kÞ ¼ Env jþ1;kþ1; SEðEnv j;kÞ ¼ Env j�1;kþ1
NWðEnv j;kÞ ¼ Env jþ1;k�1; SWðEnv j;kÞ ¼ Env j�1;k�1
VonNeumanneighboursðcÞ ¼ fNðcÞ; SðcÞ; EðcÞ;WðcÞgDiagonalneighboursðcÞ ¼ fNEðcÞ; SEðcÞ;NWðcÞ; SWðcÞg
neighboursðcÞ ¼ VonNeumanneighboursðcÞ [ DiagonalneighboursðcÞ
Finally, every cell can be in three possible states: (i) free, (ii) occupied by an obstacle, or (iii) occupied by a pedestrian. In thisthird case the cell contains also a reference to the specific pedestrian occupying it.
StateðcÞ ¼ s : s 2 fFREE;OBSTACLE; PEDESTRIANig
3.1.1. Floor fields as virtual overlay gridsAdopting the same approach of the floor field model, the environment is also endowed with a set of overlay virtual grids,
analogous to the environment grid, containing different floor fields that can influence pedestrian behaviour. The goal of thesegrids is to represent long range interactions by representing them in terms of field modifications. In this way, a local percep-tion for pedestrians is sufficient to actually gather the necessary information to carry out a plausible and effective decisionmaking activity about his/her movement. This reduce computational complexity and then time resources required by thesimulation (at the cost of a relatively small increase in memory resources requirements).
Some of the floor fields are static (they are created at the beginning of the simulation and they do not change) or dynamic(they change during the simulation). The floor fields considered in our basic model are: (i) one path fields (static) assigned toeach destination area (see below), that indicates the distance from the relative destination, acting as a potential field thatdrive pedestrian towards it, (ii) the obstacles field (static), that indicates for every cell the minimum distance from an obstacleor a wall, and (iii) the density field (dynamic) that indicates for each cell the pedestrian density in the surroundings for thecurrent time-step.
All these fields can be seen as grids identical to the environment grid, but we must define a function that extract the valueof the field for the given cell:
Valðf ; cÞ : Field� Cell! R
For sake of simplicity, we also define the following notations (where it is assumed that pedestrians know only the path fieldassociated to their desired destinations):
PathFj;k ¼ ValðPathF; cÞ : c 2 Env ^ ðRowðcÞ ¼ jÞ ^ ðColðcÞ ¼ kÞObsFj;k ¼ ValðObsF; cÞ : c 2 Env ^ ðRowðcÞ ¼ jÞ ^ ðColðcÞ ¼ kÞDensFj;k ¼ ValðDensF; cÞ : c 2 Env ^ ðRowðcÞ ¼ jÞ ^ ðColðcÞ ¼ kÞ
3.1.2. Spatial markersSpace can be annotated at design-time with different markers, that are groups M of cells c that have the function of
assigning particular roles for these cells. The main kinds of marker conceived for the model are: (i) start areas, places (cells)were pedestrian are generated, all at once or with a certain frequency distribution; (ii) destinations, places where pedestri-ans want to go, either final or intermediate.
Each destination is associated to a path field indicating (as a discrete version of a gradient) the shortest path between eachcell in the environment and this (possibly intermediate) destination. This floor field acts as a potential, driving pedestriantowards the destination (in fact we can see destinations as a subclass of field emitters).
Start areas are more complicated: no floor field is assigned to them, but they contain indications for pedestrian genera-tion. A start area can generate pedestrians in two ways: (i) frequency-based generation, in which pedestrians are generatedthrough all the simulation time following a frequency distribution; (ii) en-bloc generation, in which a set of pedestrians isgenerated at once in the area when the simulation starts. A start area contains also informations on the kind of pedestrians itmust generate (i.e. their destination areas and other relevant parameters).
3.2. Time and update strategy
The representation of simulated time in the model is also discrete, divided into steps of equal duration. We chose to setthe maximum velocity of a pedestrian to 1 cell per step (unlike in Weng et al. (2006) and Kirchner et al. (2004)) so, given that

256 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
the size of the cell 40 cm� 40 cm, we can calculate the duration of the single time-step in terms of seconds, given the factthat we assume a pedestrian velocity of about 1:2 m=s. According to these assumptions, we have a ratio of 3 steps/second.
When running a CA pedestrian model, three main update strategies are possible (Klüpfel, 2003): (i) parallel update, inwhich cells are updated all together; (ii) sequential update, in which cells are updated one after the other, always in the sameorder; (iii) shuffled sequential update, in which cells are updated one after the other, but with a different order every time.The second and third update strategies lead to the definition of asynchronous CA models (see Bandini et al. (2012) for a morethorough discussion on types of asynchronicity in CA models).
In the area of CA models for pedestrian simulation parallel update is generally preferred (Schadschneider et al., 2009),even if this strategy can lead to conflicts that must be solved with strategies that make the model more complicated. Someworks argue that simulations are more realistic if you do not resolve all the conflicts that arise, but with a certain probabilityyou prevent the movement of all pedestrians involved in a conflict (Kirchner et al., 2003). Gipps and Marksjo (1985) used asequential update for their pioneer work, but Blue and Adler (1999) point out that ‘‘with sequential updates the order of eachmove becomes unrealistically important, since as each entity moves, the next entity repositions in relation to the previousentity. Thus, the first entity would act the position of all entities over the whole lattice’’. Nonetheless, especially given thefact that our goal is modelling and simulating high density situations, we want to investigate the effects of allowing the pos-sibility of this form of micro coordinated movements and therefore we adopted a shuffled sequential update scheme for theactivation of agents’ behaviours.
3.3. Agent characteristics, states, perceptions and actions
Pedestrians are characterised, in addition to their identifier, by two pieces of information about their current and pastpositions:
Pedestrian : hid; position; oldDirection;pathFieldi
where position is the cell where the agent is currently situated, oldDirection is the last chosen action and pathField is thespecific path field indicating the destination of the pedestrian.
3.3.1. Agent perceptions and actionsAgents perceive only cells in their Moore neighbourhood and they can extract the values of the various floor fields present
in those cells.The possible actions ðActÞ for each agent are movements in one of the eight neighbouring cells (indicated as cardinal
points), plus the action of standing still (indicated by an ‘X’):
Act ¼ fN; S;W; E;NE; SE;NW; SW ;Xg
Admissible actions AdmActp ð# ActÞ are all the actions that move the pedestrian p from cell c in cells that are free at themoment he/she is updated.
AdmActp ¼ fa : a 2 Act ^ StateðaðcÞÞ ¼ FREEg
The effect of each action is clearly to move the pedestrian p in the direction indicated. This means that when an action a ischosen (for example, N), the new cell is calculated as follows:
newCell ¼ aðoldCellÞ
In the example newCell ¼ NðoldCellÞ (please note that the N function, and all functions related to other directions, are thesame defined previously in Section 3.1 for neighbourhood definition; X function, instead, maps a cell into itself).
When new cell is obtained it is marked as occupied, and the old cell is marked as free. Moreover, the density field isupdated by reducing density in the surroundings of oldCell and increasing it in the surroundings of newCell.
3.4. The agent function: linking perceptions to actions
At each time-step t agents choose their next action ai (essentially deciding their position for the next turn) by evaluatingthe utility of all admissible actions Ai;p. This is exactly the same mechanism used in the floor field model, but action proba-bility is calculated in a slightly differently way, as presented below. Moreover, in the floor field model, utility and action prob-ability are coincident, while in our model we separate them to allow different types of pedestrian implementing differentchoice function.
Agents assign a desirability value to each of the possible actions (destinations), based on five influencing factors: (i) thepath field value (G), indicating the path towards the goal, (ii) the obstacles field value (O), indicating the presence of obsta-cles, (iii) the proxemic separation value (S), indicating if there are other pedestrians near the evaluated cell, and finally (iv)the direction value (D), that indicates if the next direction is the one adopted for the previous movement (to give a certaininertia bias).

S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 257
The utility of a destination cell (which corresponds to an action/direction) is the weighted sum of all these factors (thisallows also having different types of pedestrian, or even different states of the same pedestrian, changing dynamically itsweights):
UðcÞ ¼ kgGðcÞ þ koOðcÞ þ ksSðcÞ þ kdDðcÞd
ð1Þ
where d is the distance of the new cell from the current position, that is 1 for cells in the Von Neumann neighbourhood(vertically and horizontally neighbouring cells) and
ffiffiffi2p
for diagonal cells.Given the list of possible actions (that in the basic model correspond to possible movement directions), several strategies
are possible to choose the next action. In the adopted strategy an action is randomly chosen with a probability that isproportional to the value of the utility. In particular, the probability of choosing an action is given by the exponential ofthe utility, normalised on all the possible actions pedestrian can take in the current turn:
pðaÞ ¼ N � eUðcÞ ð2Þ
where N is the normalisation factor and c ¼ aðcurrentCellÞ is the cell correspondent to the action.The perception–action cycle of each agent consists therefore in the following steps: (i) perceiving fields present in the
Moore neighbourhood cells, (ii) evaluating utility of the neighbour cells; (iii) choosing the desired cell according to utilities;(iv) moving in the desired cell and updating position.
4. Extending the basic model for high density situations
Starting from the basic model we developed and tested extensions specifically aimed at dealing with some limits of thebasic model itself. In particular, the behaviour of the basic model at high densities was not satisfactory, especially in counter-flow situations. Moreover, we tried to overcome the maximum density (and maximum flow) limits of all the CA-basedmodels implied by the discretisation of space and the non-interpenetration law.
In the following we will propose two modifications: the first one relaxes the non-interpenetration principle, transientlyallowing pedestrian overlaps, and the second considers a finer-grained representation of the environment.
4.1. The overlapping extension
This model extension allows pedestrians to transiently overlap with a small probability, relaxing the non-interpenetra-tion principle. Thus, at each time step (a maximum of) two pedestrians are allowed to stay on each cell. The rationale behindthis choice is the fact that in some situations, especially in high densities, pedestrians tend to rotate their body to pass intight spaces (as also reported in an actual observation described by Kretz et al. (2006)). Densities higher than the limit of6:25 m�2 are therefore possible without actually impeding pedestrian movement: in fact the maximum possible density,considering this extension, is 12:5 m�2, a value so high that parameters managing this extension must be finely calibratedto prevent such unreasonable (and not justified by empirical evidences) conditions.
The state of cells must therefore be changed accordingly:
StateðcÞ ¼ s : s 2 fFREE;OBSTACLE;ONE PEDi; TWO PEDSi;jg
The admissible actions AdmAct, moreover, must also include cells occupied by one other pedestrian:
AdmActp ¼ fa : a 2 Act ^ ðStateðaðcÞÞ ¼ FREE _ StateðaðcÞÞ ¼ ONE PEDj : j 2 PedsÞg
To control the effect of overlapping, discouraging it when it is unreasonable, we add an additional factor to the utilityfunction so that 1 becomes:
UðcÞ ¼ kgGðcÞ þ koOðcÞ þ ksSðcÞ þ kdDðcÞ þ koOðcÞd
ð3Þ
where OðcÞ is 1 if the cell c is occupied by another pedestrian, otherwise it is 0, and ko is a negative value.The effect of each action also changes: if a pedestrian p tries to move in a free cell the action effect is the same as in the
basic model, but if the cell is already occupied by another pedestrian the state of the cell is changed accordingly:
StateðnewCellÞ ¼ TWO PEDp;o
where o is the pedestrian that already was on the cell:
o ¼ p : p 2 Peds ^ StateðNewCellÞ ¼ ONE PEDp
A similar consideration must be done for the cell that pedestrian p is leaving: if it is the only occupant of the cell the effect ofaction does not change in respect to the basic model, but if another pedestrian o was on the same cell, state must be changedaccordingly:

258 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
StateðoldCellÞ ¼ ONE PEDo
Density field update remains instead unchanged.
4.2. The finer-grained extension
Several works (for instance Sarmady et al. (2010)) propose finer-grained models to overcome some limitations of stan-dard CA models, mainly maximum density and flow limits, and jagged chess-like movements. The advantages of introducinga finer-grained discretisation are essentially the possibility to represent distinct but not too different velocities, a smootherpedestrian movement, and the reduced impact of space (but also time) discretisation biases, by getting closer to continuousmodels. This can be an interesting approach to the study of situations characterised by a high density of pedestrians, becausethe high number of conflicts and interactions can represent a serious issue in case of coarse spatial and temporal discreti-sations. The main disadvantages are related to higher computational costs and an increased complexity of the model, espe-cially if different velocities are taken into account.
We changed the basic model by reducing cell side to 0.133 m, shrinking it to one third of the original size. If we assumeagain a square shape for pedestrians, they should occupy the space of 9 ð3� 3Þ cells. However, such a shape has some limits:for example when two pedestrian stay exactly one in front of the other, movements are very limited i.e. diagonal movementsare not allowed. So we investigated different shapes and we chose to adopt a cross-shape (as shown in Fig. 12), allowingmovements that are comparable to the coarse basic model. This choice, however, also leads to some issues: since pedestriansoccupy an area of 5 cells ð0:088 m2Þ instead of 9 ð0:16 m2Þ the effect of this occupancy reduction must be investigated.
For this study, we did not introduce additional modifications to the model, avoiding for example different velocities (use-ful especially in low rather than high density situations Kirchner et al. (2004)) and allowing only a single movement per step.At the environment level nothing changes from the basic model except the size of the cell. At the agent level all the consid-erations that were applied to a single cell, now must be modified to consider a group of cell, those specified by the shape ofthe pedestrian.
We simplified this task by considering in most of the cases only the central cell of the pedestrian (that actually identifiesunivocally the position of an agent). Thus, for example, cardinal actions have the same effect on the movement of pedestrian:they alter the position of one single cell in the direction they indicate.
newPosition ¼ aðoldPositionÞ with a 2 Act
The main changes are then the effect of actions on the floor fields and on the perception of the pedestrian. To deal with theformer, we defined a function denoting the cells being occupied by a pedestrian with centre in a given position, identified byrow and column indexes.
Footprintðp; row; colÞ : Ped�N�N! Celln
where n is the number of cells occupied by the pedestrian (9 in the square-shaped case, 5 in the cross-shaped).Then, the effect of an action on the environment is freeing the cells the pedestrian p was occupying in the old position and
marking as occupied of the cells specified by the pedestrian shape in the new position.
8c : c 2 Footprintðp; newRow;newColÞ StateðcÞ ¼ PEDESTRIANp
8c : c 2 Footprintðp; oldRow; oldColÞ StateðcÞ ¼ FREE
where newRow ¼ RowðnewPositionÞ; newCol ¼ ColðnewPositionÞ, oldRow ¼ RowðoldPositionÞ and oldCol ¼ ColðoldPositionÞ.The same consideration is valid also for modifications of the density field (see 2–4).
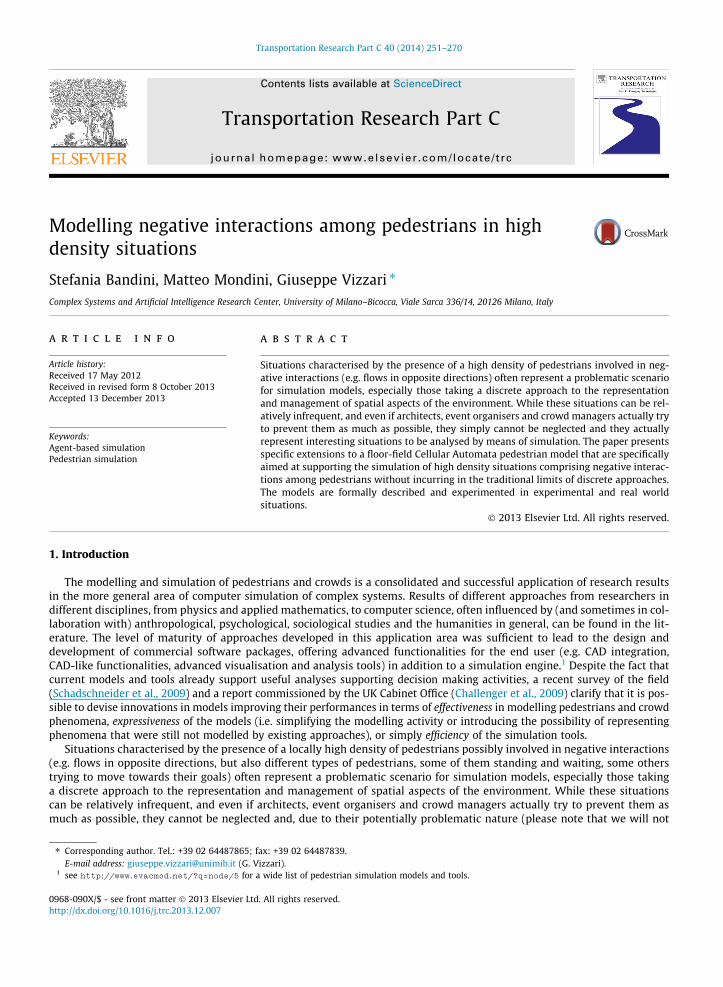
Perception is modified in a similar way: pedestrians do not perceive any more only cells in the Moore neighbourhood,instead they can inspect all the cells that they can occupy given all the possible actions in one turn (see Fig. 5). That is:
[
c2N
fFootprintðp;RowðcÞ;ColðcÞÞg
where N ¼ neighboursðcurrentPosÞ. The values of floor fields considered for utility computation are now the average of thefield values of all the cells specified by the pedestrian footprint. For example, for the density field, the value perceived bythe pedestrian p is:
PercDensFj;k ¼P
c2Footprintðp;j;kÞDensFm;n
jFootprintðp; j; kÞj
where m ¼ RowðcÞ and n ¼ ColðcÞ.Admissible actions AdmActp ð# ActÞ are all the actions that move the pedestrian p from cell c in cells that are actually free
at the moment he/she is updated.
AdmActp ¼ fa : a 2 Act ^ 8c 2 Footprintsðp; yp; xpÞ StateðaðcÞÞ ¼ FREEg
where yp ¼ RowðcurrentPospÞ and xp ¼ ColðcurrentPospÞ.

Fig. 2. The path field in a complex scenario: darker tonalities indicate we are near the destination (in blue), green cells represent the start area, red cells areobstacles. (For interpretation of the references to colour in this figure legend, the reader is referred to the web version of this article.)
Fig. 3. The left image shows the density field in a simple corridor scenario, lighter values indicate higher values of the field; in the right image thecorresponding positions of pedestrians are indicated.
Fig. 4. Two possible shapes for finer-grained pedestrians: with the first-one, in a face-to-face situation, diagonal movements are not allowed, instead theyare with the second-one.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 259
Finally, we adopted the same method applied to the basic model to achieve the duration of the simulation turn obtaininga frequency of 9 steps/s.
5. High density simulation scenarios
We executed a set of simulations to evaluate the results of the application of this model mainly in a corridor scenario,primarily because of the abundant literature in this kind of environment, and the consequent possibility to compare simu-lation results, but also because it is relatively simple to generate plausible scenarios in which critical density conditions can
Fig. 5. Visualisation of the procedure to obtain the perception neighbourhood in the finer-grained extension with cross-shaped pedestrian: (1) possibledestination cells (the red dots) for pedestrian centroid are considered; (2) the shape of the pedestrian is altered in the first position and newly occupied cellsare marked; (3) this action is repeated for all possible positions; (4) the neighbourhood is the union of all the cell marked by this procedure. (Forinterpretation of the references to colour in this figure legend, the reader is referred to the web version of this article.)
260 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
be achieved. We also executed a set of tests in a scenario related to a real observation that we carried out in September 2011at an admission test at the Psychology bachelor course of the University of Milano-Bicocca, also described by Federici et al.(2014). The four tested scenario are, more specifically: (i) corridor with single flow; (ii) corridor with two opposite flows; (iii)corridor with a starting congestion situation, for the evaluation of congestion resolution; (iv) entrance, for the evaluation ofpercolation through a dense crowd.
The specific goal of these tests was to evaluate the possibility of reproducing high density situations, also including bidi-rectional flows and and negative interactions, in which however the flow of pedestrian is still present despite the fact thatthe opportunities for movement are intrinsically reduced due to the discrete nature of the modelling approach. This goal isreflected on the relatively high values for pedestrian density analysed in the scenarios and sometimes also on the overallmeasured flows achieved as results of simulations.
Where not otherwise indicated, we used the following values for the parameters: kg ¼ 12; ko ¼ 10; ks ¼ 25; kd ¼ 0:5.
5.1. Corridor, unidirectional scenario
The corridor scenario is a simple rectangular environment, 10 metres long and 4.8 metres wide, open on eachend. In this environment it is possible to test both unidirectional and bidirectional flow situations, with pedestrianscreated in the western end that have to reach the eastern one and vice versa (in case of a bidirectional flowsituation).
Boundaries of the corridor for this scenario are set to be periodic, so a pedestrian that exits from the eastern end imme-diately re-enters the scenario through the western one, and vice versa. In this way pedestrian number remains constantthroughout the simulation, and so also the density of pedestrians in the environment.
In this scenario we ran several tests with different pedestrian densities (from very low, 0:6 m�2, to very high, even 10 m�2
for models that can reach those densities, with steps of about 0:5 m�2) with the main goal of constructing one-flow funda-mental diagrams for some of the models. Each point in the depicted diagrams represents the average value of the measuredobservable (respectively of velocity or flow) in at least thirty minutes of simulated time.
5.1.1. Basic modelIn Fig. 6 the fundamental diagram we obtained by running simulations with the basic model in the single flow scenario is
presented. Comparing this diagram with the literature, we can draw several considerations: first of all, the diagram obtainedby the basic model is somewhat similar in shape to both the empirical data and the floor field diagram, and it is quite smoothfor density values that are close to the critical density value. Absolute values for the flow are relatively high when comparedto the empirical data presented in Fig. 1.
As a consequence of the shuffled sequential update strategy, as also discussed by Klüpfel (2003), the achieved fundamen-tal diagram is asymmetrical with a maximum flow value shifted to the right, towards high density values. The main limit ofthis model, as already mentioned, is the fact that a value of 6:25 m�2 for pedestrian density means that agents are completelyunable to move.

vel
ocity
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 6. The fundamental diagram of the basic model in the corridor scenario with unidirectional pedestrial flow.
velo
city
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 7. The fundamental diagram of the overlapping model (with kov ¼ 20) in the corridor scenario with single flow.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 261
5.1.2. Overlapping and finer-grained extensionsThe overlapping and the finer-grained model were mainly conceived with the goal of overcoming the above limit in the
maximum density for basic discrete models. In Fig. 7 and 8 results of simulations in the unidirectional corridor employingthese two models on the single flow scenario are reported.
Both the models effectively allow overcoming the aforementioned density limit, and they achieve this result with rela-tively similar diagrams. However, while the finer-grained model reaches a peak in flow at a density value around 6 m�2
and then starts decreasing almost symmetrically, the flow achieved in simulation employing the overlapping extensionseems to remain stable after reaching a maximum at densities around 7 m�2. In both cases, however, the additional move-ment opportunities due, on the one hand, to the possibility of two agents to occupy the same cell and, on the other, to thereduced spatial occupation of the single agent, cause a less steep reduction of movement speed with the increase of density.
5.2. Corridor, bidirectional scenario
The scenario is analogous to the previous one, but now half the pedestrians enter the environment from the eastern end,while the other half enters from the western one. All pedestrians have the goal of reaching the opposite side of the corridor,

velo
city
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 8. The fundamental diagram of the finer-grained model in the corridor scenario with single flow.
262 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
so in this case two opposite flows are formed. In this kind of situation pedestrians can be involved into a negative interaction(i.e. situations in which distinct goals can be the reason of movement conflicts) even in relatively low density conditions. It isdue to the importance of evaluating the capability of models to plausibly manage situations characterised by local high den-sity areas and negative interactions without incurring in complete in complete blocks that we chose to analyse this scenario.
There is, as of today, no clear consensus on the differences between fundamental diagrams in unidirectional and bidirec-tional situations, as discussed by Zhang et al. (2012). In Fig. 9 we report two fundamental diagrams related to bidirectionalpedestrian flows, respectively related to a design manual (Weidmann, 1993) and a field-observation (Older, 1968). While theoverall shapes are similar to the unidirectional case, the variability of the flow in medium and high density must beemphasised.
5.2.1. Basic modelResults of simulations carried out in the bidirectional scenario with the basic model lead to a fundamental diagram de-
picted in Fig. 10: at densities around 3:5 m�2 the overall flow falls to almost zero values. We can label this value as the criticaldensity beyond which the basic model, for bidirectional flows, leads to an almost totally blocked situation. While such a crit-ical point for density may exist also in reality, the drop in the flow is, on the on hand, too steep and, on the other, taking placeat unreasonably low levels of density.
5.2.2. The overlapping extensionResults of simulations executed in the bidirectional scenario adopting the overlapping extension led to the achievement
of results overcoming the issues related to the basic model, as shown in Fig. 11. The decrease of velocity is much smootherand the flow diagram is qualitatively more similar to empirical data than the one representing basic model results: there isstill a critical density causing a drop of the overall flow, but the overall the decrease is less steep and the flow stabilises fordensities between 4 m�2 and 6 m�2 before actually dropping to a complete block situation.
Fig. 9. Empirical fundamental diagrams for bidirectional (opposite) pedestrian movement in planar facilities.

velo
city
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 10. The fundamental diagram of the basic model in the corridor scenario with double flow.
velo
city
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 11. The fundamental diagram of the overlapping model in the corridor scenario with double flow and kov ¼ 22.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 263
The shape of the obtained flux diagram is therefore quite interesting as it can be essentially divided into three phases: afirst part in low densities, a free flow regime, where the model behaves similarly to the single flow scenario; the second por-tion, in medium and medium–high densities, a congested situation in which flow decreases without becoming a completejam, and a final part in which even the overlapping mechanism cannot overcome the effect of density. The congested phase isthe one in which the overlapping mechanism has a prominent effect, shifting the drop of flow at higher densities.
It must be noted that this particular shape is achieved for different values of the kov parameter, although lower values forthis parameter actually increase the achieved flow rate in the congested phase, making it easier for pedestrians to effectivelyperform overlapping.
5.2.3. The finer-grained extensionThe results achieved with the finer-grained extension exhibit a similar pattern to the one observed in the evaluation of
the unidirectional scenario, as shown in Fig. 12. Unlike for the overlapping extension, this diagram mainly shows tworegimes: a free flow persisting until density reaches quite high levels (almost 5 m�2) followed by a relatively brief phasein which velocity quickly drops to zero.

264 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
5.3. Corridor, congestion resolution
The third experimental scenario for the model represents an artificial situation in which the capability of models to re-solve a severe congestion was tested. We used once again the corridor environment, with some modifications: two startingareas (9� 12 cells or 3:6� 4:8 m), respectively in the eastern and western ends of the corridor, have been defined to allowcreating a relatively large number of pedestrians (maximum 108 pedestrians can be hosted by each starting area) at thebeginning of the simulation. These platoons are headed in opposite directions, and they are also quite close to each other(in fact the distance between them is just 2:4 m). When people reach the exit they leave the scenario without re-entering:we are only interested in the capability of models to deal with this specific and problematic starting condition and in theamount of time required to complete the operation. This kind of situation represents a virtual extreme version of an actualexperiment that was artificially created during the above mentioned experiments (Manenti et al., 2011) and the platoonswere generally able to solve the congestion in relatively short time.
We executed different simulations (10 for all the different situations) for all the models respectively with 40, 60, 80 and100 pedestrian starting from each of the two start areas. The goal was to evaluate the time required for all pedestrians to exitfrom the scenario, as an indicator of the time required to the different models to solve locally high densities, that can causejamming and congestions (see Fig. 13).
As shown in Fig. 14 the model that supports the quickest resolution of congestion situations is the overlapping extension:as also discussed in the description of the model in Section 4.1, its rationale comes from observations carried out in coun-terflow situations in which pedestrians rotate their torso to solve a conflict. From these results it is also apparent that thefiner-grained extension is the one that has most problems in managing this kind of situation among the tested models,confirming negative result also discussed by Kirchner et al. (2004).
We also analysed the effect of altering the value for the kov parameter in order to evaluate the actual possibility to tunethe frequency of overlapping and therefore increasing or decreasing the overall flow in the corridor and the time required tosolve the conflict. In Fig. 15, we report these results that actually back up the intuition that lowering the parameter makesoverlapping more frequent and, as a consequence, increases the overall flow.
We want to further stress that these results should be compared with empirical data to actually evaluate the capability ofthe models to reproduce real situations. The available results from the experiments are not sufficient to claim that this sce-nario was actually calibrated and evaluated against real data. However, the results achieved by applying the overlappingextension are actually very close to the observed data and they also show that it is relatively simple to perform a calibrationof the model to actually tune it to better fit a specific situation.
5.4. Percolation in a dense crowd
The last scenario is based on a real observation that was performed in the context of the admission test to the bachelorcourse in Psychology that took place at the U6 building of the University of Milano-Bicocca in Sept. 1, 2011. As reported inFederici et al. (2014), a large number of candidates attended the test; they were assigned to specific lecture halls but, accord-ing to the procedure, they had to wait outside the building for an operator to call people that had to reach a specific hall and
velo
city
[m/s
]
flow
[1/(m
*s)]
density [1/m2] density [1/m2]
Fig. 12. The fundamental diagram of the finer-grained model in the corridor scenario with double flow.

Fig. 13. The congestion resolution scenario.
time
(s)
number of pedestrians
Fig. 14. Results on congestion resolution time for different models.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 265
accompany them in small groups. In this situation we had some negative interactions between perspective students trying toreach the entrance because their hall had been called and others actually waiting for their turn (see Fig. 16). Waiting studentswere willing to give way to the ones that tried to reach the entrance, but the simple pedestrian density in the area made itdifficult for them to actually move. Basic proxemic rules Hall (1966) are essentially suspended in this kind of situation (seeFig. 17).
What we observed in this situation, by analysing videos of the entrance process, was a sort of ‘percolation’ through adense crowd.2 The level of density was analysed from videos and an average value of 4:3 m�2 was measured, but even highervalues were observed for relatively small areas and for short periods of time. Despite this, all people called by the operator havesucceeded in reaching their goal in an average reasonable time, being obviously slowed by the crowd but maintaining arelatively smooth movement, also thanks to the formation of lanes and river-like patterns.
2 Please notice that we do not anlyse the observed phenomenon by employing a percolation theory perspective (Stauffer and Aharony, 1994).

time
(s)
number of pedestrians
Fig. 15. Results on congestion resolution time for different calibrations of parameter kov with the overlapping model. We can see that with low resistance tooverlapping (a low value of kov ) time required for congestion resolutions decreases significantly.
Fig. 16. A picture of people waiting to enter the U6 building of the University of Milano- Bicocca during the admission test to the bachelor course inPsychology.
266 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
The physical environment is represented in a similar way to the evacuation room: there is a passage (the door) throughwhich the called perspective students must pass to reach their goal, positioned beyond the passage. We placed three startingpoints for them, one on the north-west, one on the south-west and one central on the west side of the scenario. Instead, forthe waiting crowd starting and ending points coincide, and they occupy a large area near the passage. These pedestrians areessentially not driven by the path field, since they are essentially in a portion of space in which it has the maximum value,but they still can be urged to move due to social interactions essentially represented by the density field.
We ran tests with 30 people entering, and 300 people waiting (we calculated these number to match the average ob-served density), with a number of simulation runs (10) for the different models, to evaluate: (i) if all entering pedestrianssucceeded in reaching their goal and the time required to complete the operation; (ii) if lanes and river-like patterns wereformed.
After initial tests, we understood that this scenario required a specific ad hoc definition of the behaviour of waitingpedestrians.
5.4.1. Modelling waiting pedestriansIn the modelling of waiting pedestrians we had to consider specific requirements due to the particular behaviour of the
observed perspective students and, more precisely:
� waiting pedestrians stand still most of time;� waiting pedestrians distribute in a random way, a proxemic separation is present but since in a crowd a large number of
groups of pedestrians is generally present (see, e.g., the already cited Federici et al. (2014) or also Moussaïd et al. (2010))the overall distribution is generally not uniform;� pedestrians mainly move according to social interactions, that is, when approached by another pedestrian that is clearly
moving towards a certain destination, or due to external events (e.g. the call of an operator, in this specific scenario).
The last requirement created several issues: the only way to achieve it in all the models was increasing the separationweight ks, but this also caused the generation of a ‘Brownian-like’ motion even when people were not passing, a

Fig. 17. The percolation scenario.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 267
phenomenon that was observed to a certain extent, but that generally violated the other requirements and led to excessiveoverall dynamics.
We overcame this problem by adding to the utility computation of waiting pedestrian a constant factor that furtherencourages choosing the ‘X’ (‘stand still’) action. Moreover, by lowering the goal weight kg (values around 2 but still higherthan zero to avoid people wandering out from the waiting area), it was also possible to lower the separation weight ks tovalues of about 15. The direction weight has been instead set to zero, as its role has been partially taken by the ‘stand still’factor.
5.4.2. Results on percolationIn Fig. 18 the completion times for the entrance operation of 30 pedestrians percolating through the waiting crowd of 300
pedestrians are shown. Before analysing the results, it is worth pointing out that all models reach the main goal: let pedes-trian percolate through the dense crowd without creating block situations.
The dark blue bars indicate the average on the ten runs of the total percolation time, measured as the time necessary forthe total entrance movement of the ‘slowest’ pedestrian. Average values for exit time are indicated by the light blue bars,with standard deviation depicted by the white range.
The first two bars from the left represent results obtained by respectively the basic model and by the finer-grained exten-sion. As we can see, the results are very similar: the average maximum entrance time (that coincides with the average com-pletion time of the group entrance) is rather high and the variability is also rather high. Once again, the finer-grainedextension does not provide encouraging results.
The last two bars represents results obtained by applying the overlapping extension, with two different settings for thekov parameter: bar number 3 depicts results for kov ¼ 22, while bar number 4 for kov ¼ 40. The overlapping extension pro-vides the total completion times closer to the average completion time measured in the videos (that is about 25 s, consid-ering that it was not simple to evaluate the actual beginning of each entrance operation triggered by the call of an operator)and it allows to represent very different conditions with appropriate parameters calibration.

Fig. 18. Time of percolation for different models, where: 1 = basic model; 2 = finer-grained extension; 3 = overlapping extension with kov ¼ 22;4 = overlapping extension with kov ¼ 40.
268 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
5.5. Discussion
The simulation scenarios and results discussed in this section show that the two considered extensions to the basic floor-field CA model actually allow overcoming intrinsic limits of the model in high density situations due to its discrete nature.Nonetheless, although the presented results mainly represent an exploration of the dynamics that can be achieved throughthese extensions, we can draw some conclusions on their applicability. First of all, the overlapping extension represents amoderately simple modification of the base model, causing a very limited overhead in computational costs, that surely doesnot help in overcoming the limits of a discrete approach in the generation of micro-level smooth trajectories, but that allowsgenerating meso-level results in tune with literature and preliminary observations carried out in high density situations inpresence of negative pedestrian interactions. Moreover, the extension allows a relatively simple calibration of the frequency,and therefore on the impact, of the overlapping phenomenon.
The finer-grained extension, on the other hand, represents a relatively complicated extension, leading to much highercomputational costs when compared to the basic model and overlapping extension in the same simulation scenarios, butit also does not produce significant improvements in the achieved results at least in medium and high density situations.The model could produce smoother trajectories in free flow situations and therefore it could be interesting to those tryingto improve micro-level results with a discrete approach, but the evaluation of this possibility was out of the scope of thepresent work. Preliminary results seem to suggest that this kind of approach, however, can provide interesting results whencoupled with additional dynamic floor-field mechanisms: in particular we are testing an extension introducing a form ofanticipation Suma et al. (2012) in the finer-grained representation and the preliminary results are promising.
Finally, all the results we achieved by employing a shuffled sequential update strategy for the model and, as discussed inSection 3.2, this choice lead to models presenting micro coordination effects. Therefore, we can expect a slight decrease ofachieved velocities and flows in medium–high density situations by changing the update strategy to the parallel approach.
6. Conclusions and future developments
The paper has presented, discussed and evaluated extensions to the floor-field CA pedestrian model that are specificallyaimed at supporting the simulation of high density situations comprising negative interactions among pedestrians withoutincurring in the traditional limits of discrete approaches. In particular, in addition to a basic model employed as a baseline forcomparison, two extensions were introduced: a model allowing transient pedestrians overlapping in high density situationsand a model characterised by a finer discretisation of the environment. The models were formally described and experi-mented in experimental and real world situations. The overlapping extension is able to produce interesting results with min-imal computational overheads in all the analysed situations. The finer grained extension, instead, without the introduction ofadditional mechanisms is not able to provide improvements on the basic modelling approach, despite the increased compu-tational costs. Additional future works are aimed at integrating in this modelling approach two types of extensions: (i) a con-tribution at the operational level reflecting the impact of the presence of groups in the simulated population (in the vein ofManenti et al. (2011) and Moussaïd et al. (2010)): the first results of this research effort are discussed by Vizzari et al. (2013)(ii) investigating the tactical and strategic level in larger scenarios.
Acknowledgements
The authors would like to thank Jun Zhang, Wolfram Klingsch, Andreas Schadschneider and Armin Seyfried for supplyingfundamental diagrams of bidirectional flows; they also thank Katsuhiro Nishinari for sharing preliminary data on experimentsfor pedestrian counterflow scenario and for the fruitful ongoing collaboration on this topic; finally, they would also like to thankthe University of Milano–Bicocca for supporting the observations in the context of the admission test to the Psychology course.
S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270 269
References
Bandini, S., Bonomi, A., Vizzari, G., 2012. An analysis of different types and effects of asynchronicity in cellular automata update schemes. Nat. Comput. 11(2), 1–11.
Bandini, S., Federici, M.L., Vizzari, G., 2007. Situated cellular agents approach to crowd modeling and simulation. Cybernet. Syst. 38 (7), 729–753.Batty, M., 2001. Agent based pedestrian modeling (editorial). Environ. Plan. B: Plan. Des. 28, 321–326.Blue, V.J., Adler, J.L., 1999. Cellular automata microsimulation of bi-directional pedestrian flows. Transport. Res. Rec. 1678, 135–141.Blue, V.J., Adler, J.L., 2000. Modeling four-directional pedestrian flows. Transport. Res. Rec. 1710, 20–27.Burstedde, C., Klauck, K., Schadschneider, A., Zittartz, J., 2001. Simulation of pedestrian dynamics using a two-dimensional cellular automaton. Physica A:
Stat. Mech. Appl. 295 (3–4), 507–525.Challenger, R., Clegg, C.W., Robinson, M.A., 2009. Understanding Crowd Behaviours: Supporting Evidence. Technical Report; University of Leeds.Chattaraj, U., Seyfried, A., Chakroborty, P., 2009. Comparison of pedestrian fundamental diagram across cultures. Adv. Complex Syst. 12 (3), 393–
405.Chen, S., Alonso-Marroquin, F., Busch, J., Hidalgo, R.C., Sathianandan, C., Álvaro, Ramírez-Gómez, Mora, P., 2013. Scaling laws in granular flow and pedestrian
flow. AIP Conf. Proc. 1542 (1), 157–160.Dijkstra, J., Jessurun, J., de Vries, B., Timmermans, H.J.P., 2006. Agent architecture for simulating pedestrians in the built environment. In: International
Workshop on Agents in Traffic and Transportation, pp. 8–15.Federici, M.L., Gorrini, A., Manenti, L., Vizzari, G., 2014. An innovative scenario for pedestrian data collection: the observation of an admission test at the
university of milano-bicocca. In: Weidmann, U. Kirsch, U. Schreckenberg, M. (Eds.), Proceedings of 6th International Conference on Pedestrian andEvacuation Dynamics – PED 2014.
Gipps, P., Marksjo, B., 1985. A micro-simulation model for pedestrian flows. Math. Comput. Simul. 27, 95–105.Gloor, C., Stucki, P., Nagel, K., 2004. Hybrid techniques for pedestrian simulations. In: Sloot, P.M.A., Chopard, B., Hoekstra, A.G. (Eds.), Cellular Automata, 6th
International Conference on Cellular Automata for Research and Industry, ACRI 2004, Lecture Notes in Computer Science, vol. 3305. Springer-Verlag, pp.581–590.
Hall, E.T., 1966. The Hidden Dimension. Anchor Books.Helbing, D., 1992. A fluid-dynamic model for the movement of pedestrians. Complex Syst. 6 (5), 391–415.Helbing, D., Johansson, A., Al-Abideen, H.Z., 2007. The dynamics of crowd disasters: an empirical study. Phys. Rev. E 75, 046109.Helbing, D., Molnár, P., 1995. Social force model for pedestrian dynamics. Phys. Rev. E 51 (5), 4282–4286.Helbing, D., Schweitzer, F., Keltsch, J., Molnár, P., 1997. Active walker model for the formation of human and animal trail systems. Phys. Rev. E 56 (3), 2527–
2539.Henein, C.M., White, T., 2005. Agent-based modelling of forces in crowds. In: Davidsson, P., Logan, B., Takadama, K. (Eds.), Multi-Agent and Multi-Agent-
Based Simulation, Joint Workshop MABS 2004, New York, NY, USA, July 19, 2004, Revised Selected Papers, Lecture Notes in Computer Science, vol. 3415.Springer-Verlag, pp. 173–184.
Henein, C.M., White, T., 2007. Macroscopic effects of microscopic forces between agents in crowd models. Physica A: Stat. Mech. Appl. 373 (0), 694–712.Hoogendoorn, S.P., Daamen, W., 2005. Pedestrian behavior at bottlenecks. Transport. Sci. 32 (2), 147–159.Kirchner, A., Klüpfel, H., Nishinari, K., Schadschneider, A., Schreckenberg, M., 2004. Discretization effects and the influence of walking speed in cellular
automata models for pedestrian dynamics. J. Stat. Mech.: Theory Exp. 2004 (10), P10011.Kirchner, A., Nishinari, K., Schadschneider, A., 2003. Friction effects and clogging in a cellular automaton model for pedestrian dynamics. Phys. Rev. E 67,
056122.Klüpfel, H., 2003. A Cellular Automaton Model for Crowd Movement and Egress Simulation. Ph.D. thesis, University Duisburg-Essen.Kretz, T., Grünebohm, A., Kaufman, M., Mazur, F., Schreckenberg, M., 2006. Experimental study of pedestrian counterflow in a corridor. J. Stat. Mech.: Theory
Exp. 2006 (10), P10001.Manenti, L., Manzoni, S., Vizzari, G., Ohtsuka, K., Shimura, K., 2011. An agent-based proxemic model for pedestrian and group dynamics: motivations and
first experiments. In: Villatoro, D., Sabater-Mir, J., Sichman, J.S. (Eds.), MABS, Lecture Notes in Computer Science, vol. 7124. Springer, pp. 74–89.
Mori, M., Tsukaguchi, H., 1987. A new method for evaluation of level of service in pedestrian facilities. Transport. Res. Part A 21 (3), 223–234.Moussaïd, M., Perozo, N., Garnier, S., Helbing, D., Theraulaz, G., 2010. The walking behaviour of pedestrian social groups and its impact on crowd dynamics.
PLoS ONE 5 (4), e10047.Musse, S.R., Thalmann, D., 2001. Hierarchical model for real time simulation of virtual human crowds. IEEE Trans. Vis. Comput. Graph. 7 (2), 152–164.Nagel, K., Schreckenberg, M., 1992. A cellular automaton model for freeway traffic. J. Phys. I France 2 (2221), 222–235.Okazaki, S., 1979. A study of pedestrian movement in architectural space, part 1: Pedestrian movement by the application of magnetic models. Trans. AIJ
(283), 111–119.Older, S.J., 1968. Movement of pedestrians on footways in shopping streets. Traffic Eng. Contr. 10, 160–163.Paris, S., Donikian, S., 2009. Activity-driven populace: a cognitive approach to crowd simulation. IEEE Comput. Graph. Appl. 29 (4), 34–43.Patil, S., van den Berg, J.P., Curtis, S., Lin, M.C., Manocha, D., 2011. Directing crowd simulations using navigation fields. IEEE Trans. Vis. Comput. Graph. 17 (2),
244–254.Predtechenskii, V., Milinskii, 1978. Planning for Foot Traffic Flow in Buildings. Amerind Publishing.Sarmady, S., Haron, F., Talib, A., 2010. Simulating crowd movements using fine grid cellular automata. In: 2010: 12th International Conference on Computer
Modelling and Simulation (UKSim), pp. 428–433.Schadschneider, A., Klingsch, W., Klüpfel, H., Kretz, T., Rogsch, C., Seyfried, A., 2009. Evacuation dynamics: empirical results, modeling and applications. In:
Meyers, R.A. (Ed.), Encyclopedia of Complexity and Systems Science. Springer, pp. 3142–3176.Schreckenberg, M., Sharma, S.D. (Eds.), 2001. Pedestrian and Evacuation Dynamics. Springer-Verlag.Shao, W., Terzopoulos, D., 2007. Autonomous pedestrians. Graph. Models 69 (5–6), 246–274.Shiwakoti, N., Sarvi, M., Rose, G., Burd, M., 2011. Animal dynamics based approach for modeling pedestrian crowd egress under panic conditions. Procedia –
Social Behav. Sci. 17, 438–461.Stauffer, D., Aharony, A., 1994. Introduction To Percolation Theory. CRC Press.Suma, Y., Yanagisawa, D., Nishinari, K., 2012. Anticipation effect in pedestrian dynamics: modeling and experiments. Physica A: Stat. Mech. Appl. 391 (1–2),
248–263.Toyama, M.C., Bazzan, A.L.C., da Silva, R., 2006. An agent-based simulation of pedestrian dynamics: from lane formation to auditorium evacuation. In:
Nakashima, H., Wellman, M.P., Weiss, G., Stone, P. (Eds.), 5th International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS2006). ACM Press, pp. 108–110.
Vizzari, G., Manenti, L., Crociani, L., 2013. Adaptive pedestrian behaviour for the preservation of group cohesion. Complex Adapt. Syst. Model. 1 (7).Weidmann, U., 1993. Transporttechnik der Fussgänger – Transporttechnische Eigenschaftendes Fussgängerverkehrs (Literaturstudie). Literature Research
90; Institut füer Verkehrsplanung, Transporttechnik, Strassen- und Eisenbahnbau IVT an der ETH Zürich.Weng, W.G., Chen, T., Yuan, H.Y., Fan, W.C., 2006. Cellular automaton simulation of pedestrian counter flow with different walk velocities. Phys. Rev. E 74,
036102.Xia, Y., Wong, S.C., Shu, C.W., 2009. Dynamic continuum pedestrian flow model with memory effect. Phys. Rev. E 79, 066113.

270 S. Bandini et al. / Transportation Research Part C 40 (2014) 251–270
Xu, S., Duh, H.B.L., 2010. A simulation of bonding effects and their impacts on pedestrian dynamics. IEEE Trans. Intell. Transport. Syst. 11 (1), 153–161.Zafar, B., 2011. Analysis of the Mataf – Ramadan 1432 AH. Technical Report; Hajj Research Institute, Umm al-Qura University, Saudi Arabia.Zhang, J., Klingsch, W., Schadschneider, A., Seyfried, A., 2012. Ordering in bidirectional pedestrian flows and its influence on the fundamental diagram. J.
Stat. Mech.: Theory Exp. 2012 (02), P02002.
Related Documents











