Modellierung der Kovarianzmatrix von RIM Beobachtungen zur Deformationsanalyse von Bauwerken Stefan Lederbauer INTERGEO, Hannover, 10. Oktober 2012

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Modellierung der Kovarianzmatrix von RIM Beobachtungen zur Deformationsanalyse von Bauwerken
Stefan Lederbauer
INTERGEO, Hannover, 10. Oktober 2012

2
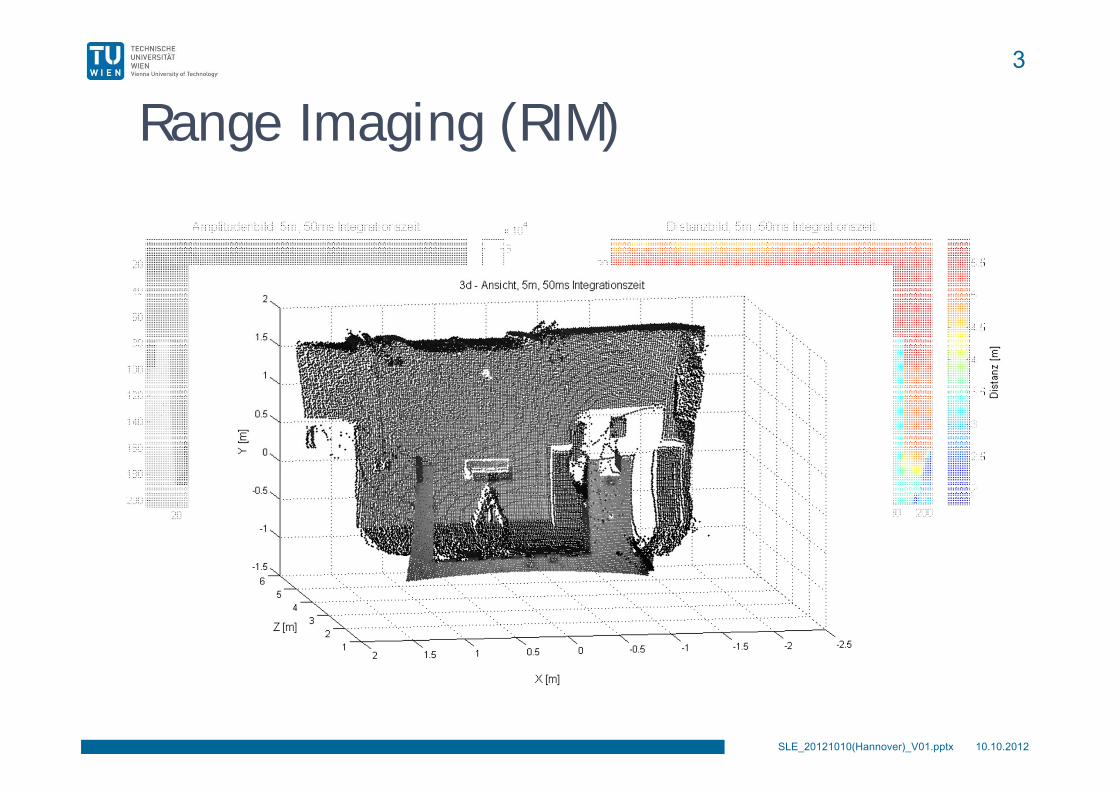
Range Imaging (RIM)
10.10.2012SLE_20121010(Hannover)_V01.pptx
simultan, für jedes Pixel
3
Range Imaging (RIM)
10.10.2012SLE_20121010(Hannover)_V01.pptx
simultan, für jedes Pixel
4
Distanzkameras
10.10.2012SLE_20121010(Hannover)_V01.pptx
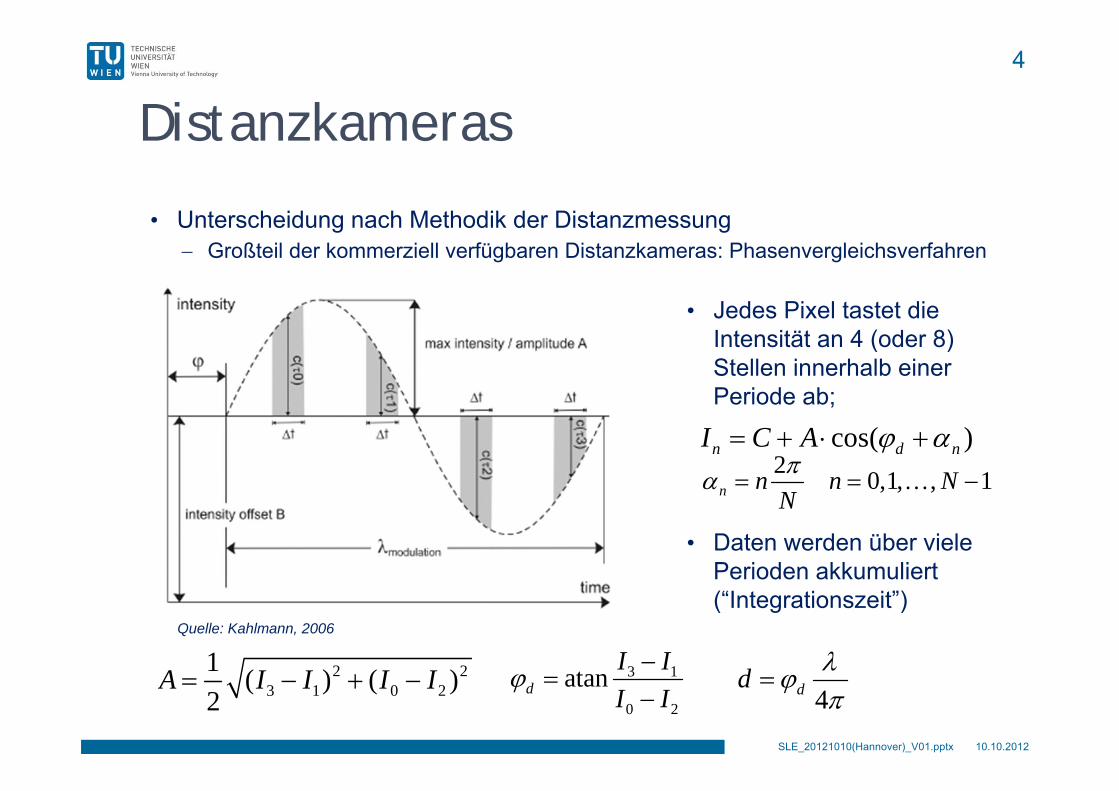
• Unterscheidung nach Methodik der Distanzmessung Großteil der kommerziell verfügbaren Distanzkameras: Phasenvergleichsverfahren
2 23 1 0 2
1 ( ) ( )2
A I I I I 3 1
0 2
atandI II I
4dd
• Jedes Pixel tastet die Intensität an 4 (oder 8) Stellen innerhalb einer Periode ab;
• Daten werden über viele Perioden akkumuliert (“Integrationszeit”)
Quelle: Kahlmann, 2006
cos( )n d nI C A 2 0,1, , 1n n n NN

5
Varianz der Messwerte• Lineare Varianzfortpflanzung, angewendet auf dieses Modell liefert:
10.10.2012SLE_20121010(Hannover)_V01.pptx
14D IA
12A I
[m] 0.003 11D A
… Kamera
… beinflussbar
1 21
D C CA
Camcube-IG /TUW
• Brauchbare Näherung:
6
Experiment: Monitoring einer Brücke
10.10.2012SLE_20121010(Hannover)_V01.pptx
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
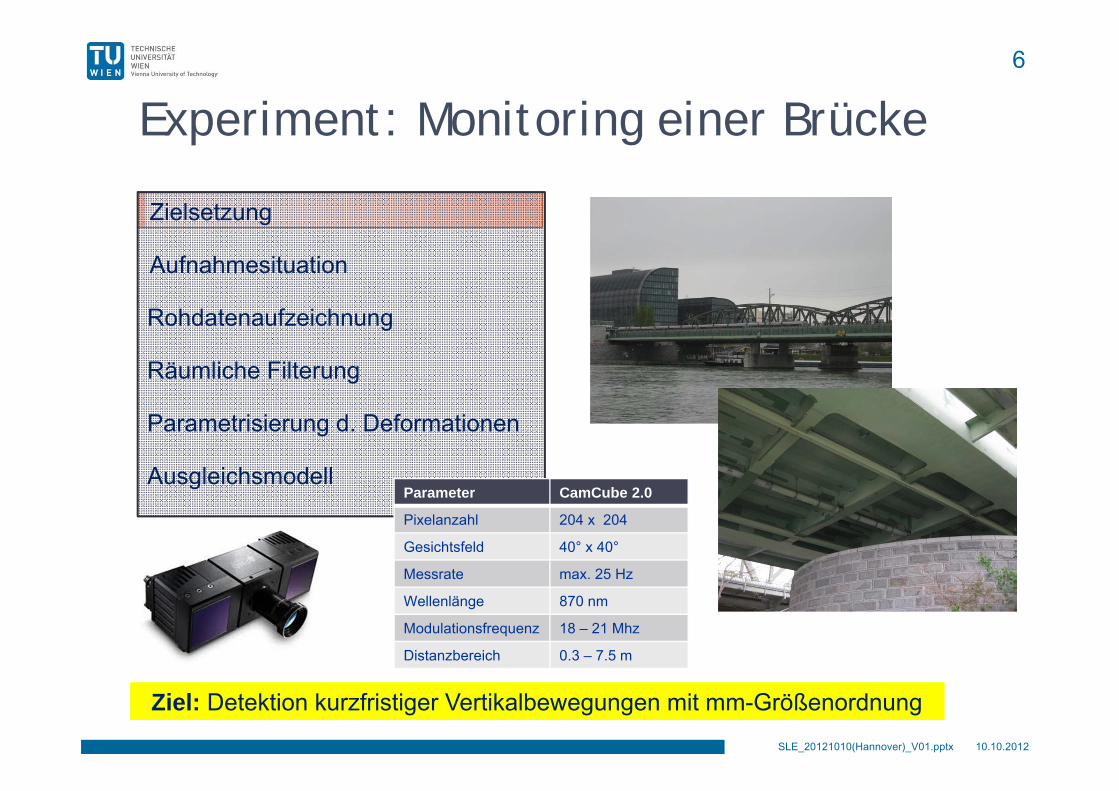
Ziel: Detektion kurzfristiger Vertikalbewegungen mit mm-Größenordnung
Parameter CamCube 2.0
Pixelanzahl 204 x 204
Gesichtsfeld 40° x 40°
Messrate max. 25 Hz
Wellenlänge 870 nm
Modulationsfrequenz 18 – 21 Mhz
Distanzbereich 0.3 – 7.5 m

7
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
S
N
totalstation
Camcube
steel girder
• CamCube ~1.5 m unter Stahlträger
• Distanz zu den nächstliegenden Pfeilern: ~10m bzw. 25 m
• Totalstation Leica TCRP1201 für Referenzmessungen
8
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
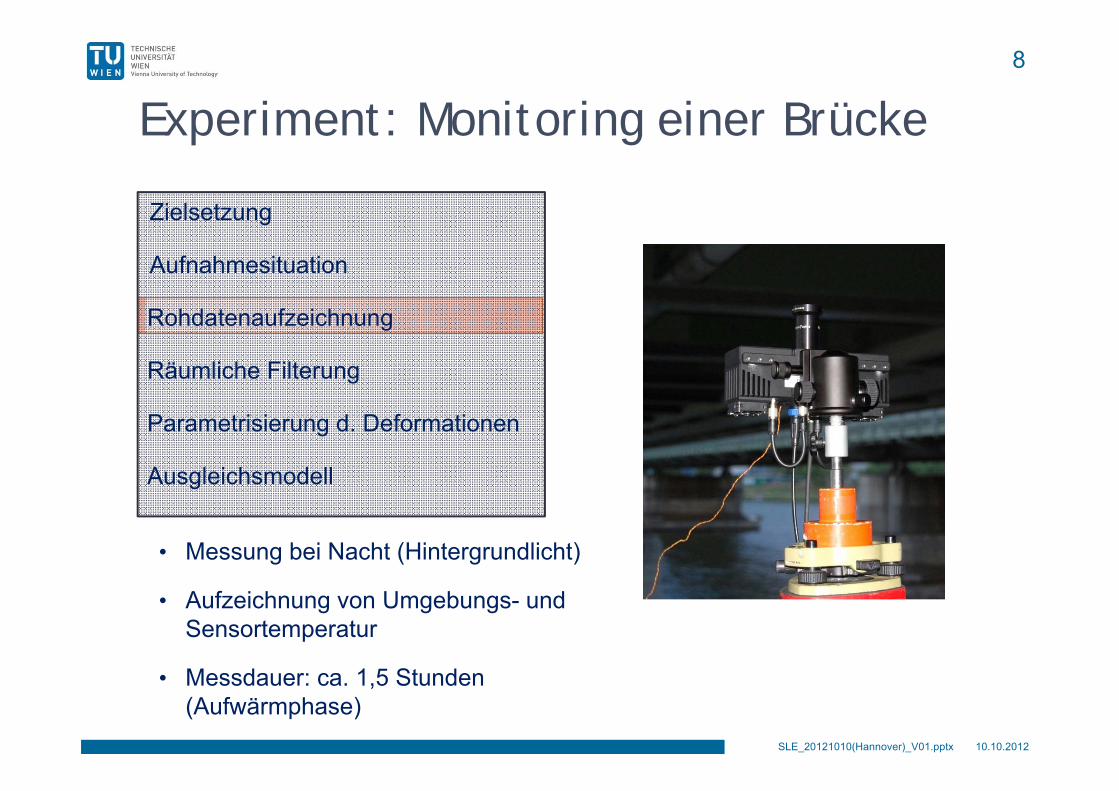
• Messung bei Nacht (Hintergrundlicht)
• Aufzeichnung von Umgebungs- und Sensortemperatur
• Messdauer: ca. 1,5 Stunden (Aufwärmphase)
9
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
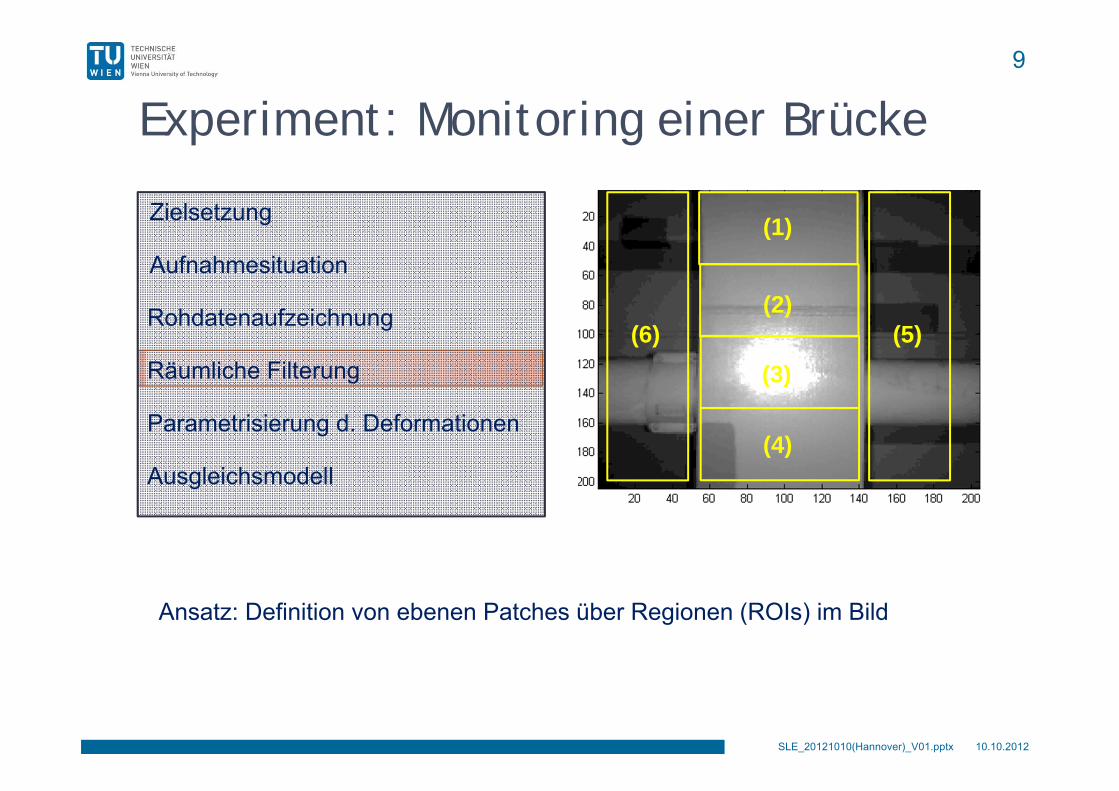
Ansatz: Definition von ebenen Patches über Regionen (ROIs) im Bild
(6)
(1)
(2)
(3)
(4)
(5)
10
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
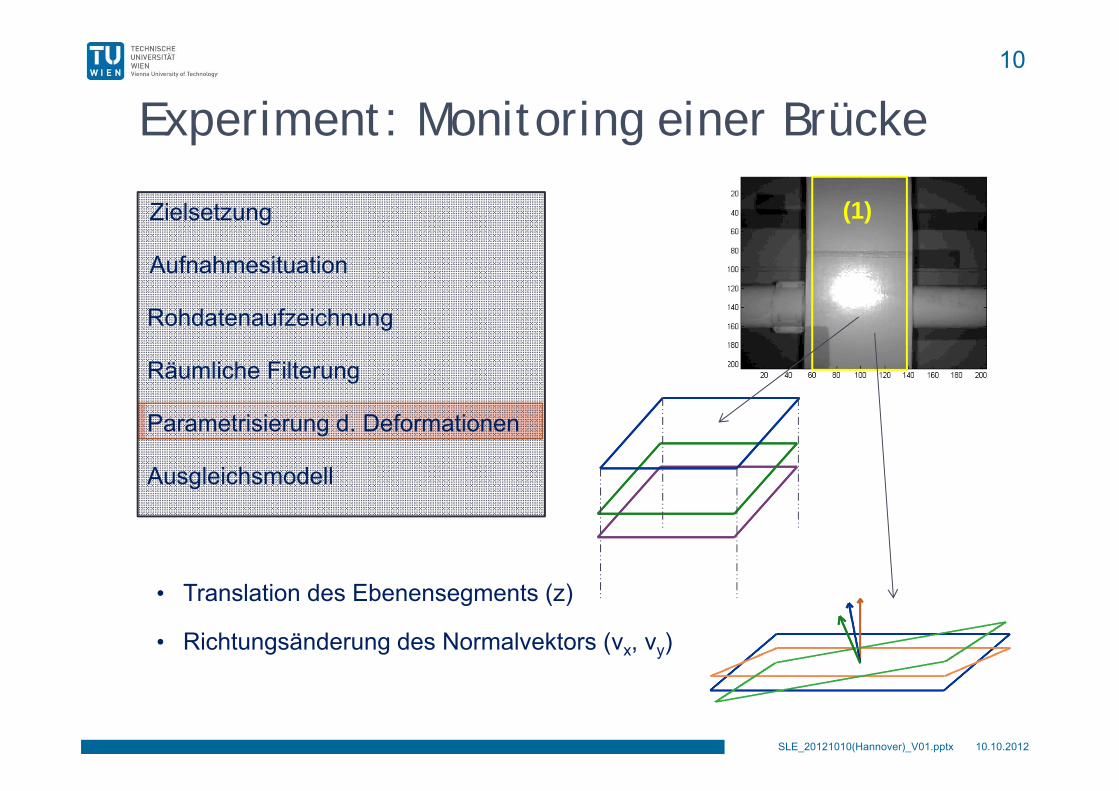
• Translation des Ebenensegments (z)
• Richtungsänderung des Normalvektors (νx, νy)
(1)
11
10.10.2012SLE_20121010(Hannover)_V01.pptx
Experiment: Monitoring einer Brücke
Zielsetzung
Aufnahmesituation
Rohdatenaufzeichnung
Räumliche Filterung
Parametrisierung d. Deformationen
Ausgleichsmodell
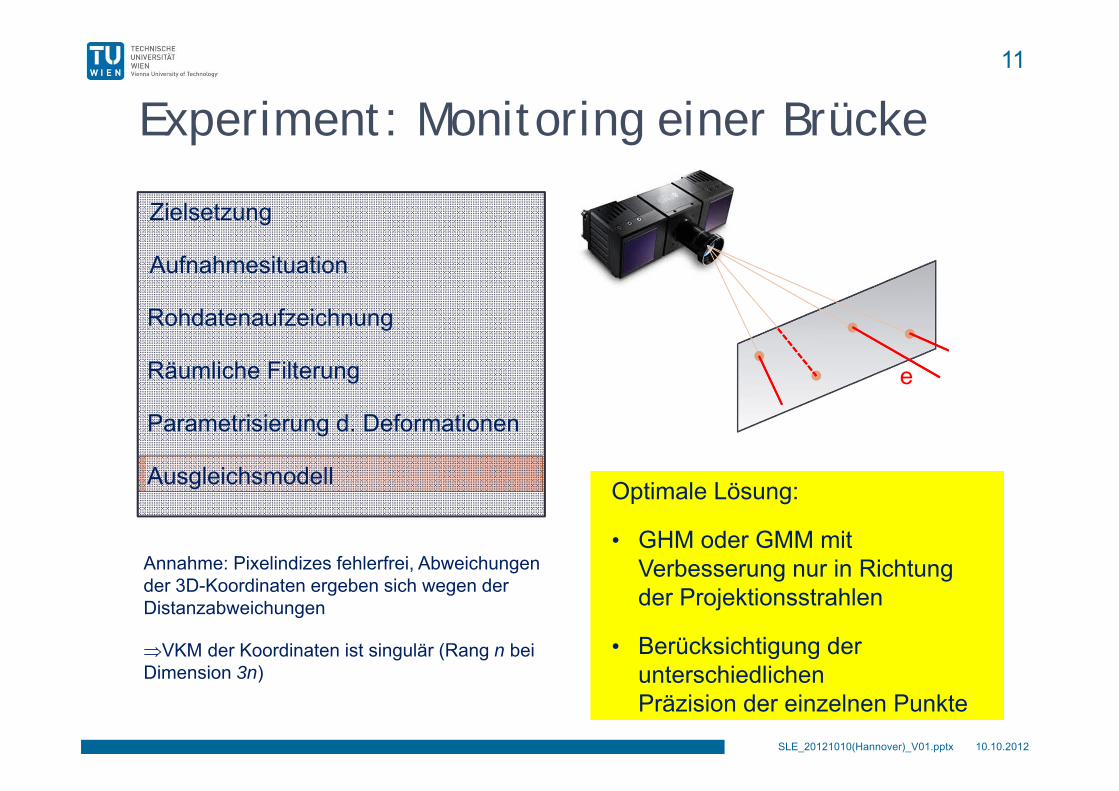
e
Annahme: Pixelindizes fehlerfrei, Abweichungen der 3D-Koordinaten ergeben sich wegen der Distanzabweichungen
VKM der Koordinaten ist singulär (Rang n bei Dimension 3n)
Optimale Lösung:
• GHM oder GMM mit Verbesserung nur in Richtung der Projektionsstrahlen
• Berücksichtigung der unterschiedlichenPräzision der einzelnen Punkte
12
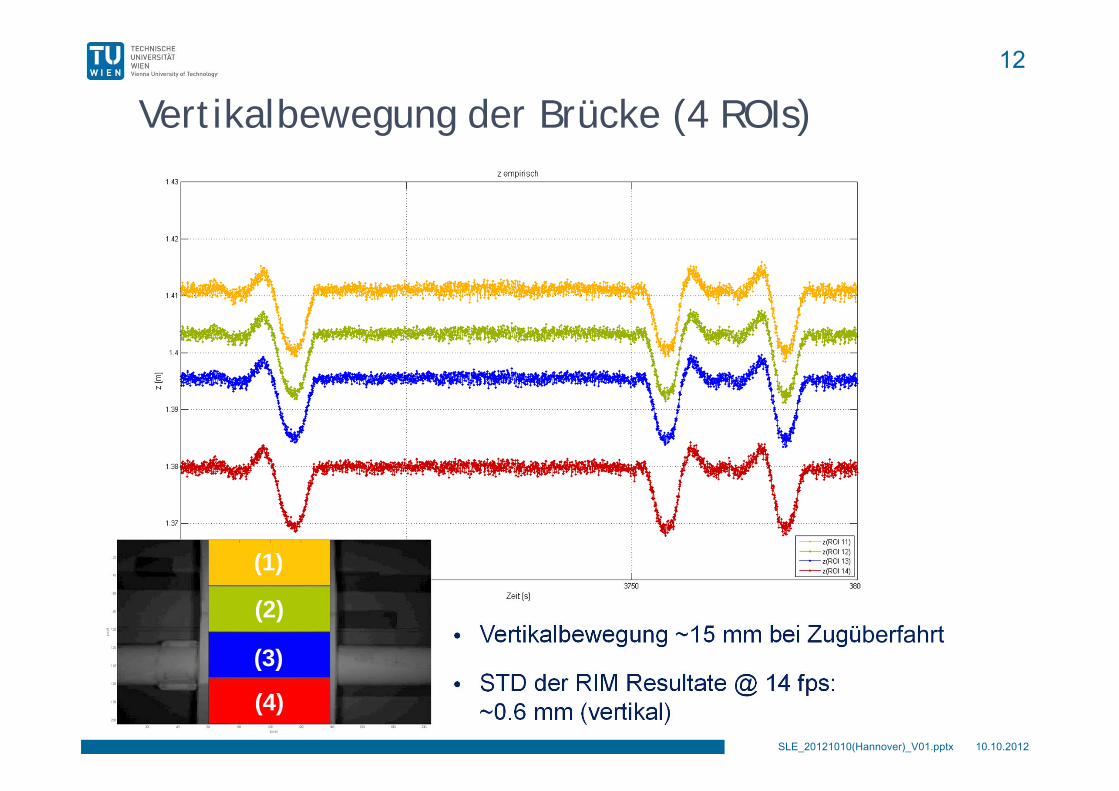
Vertikalbewegung der Brücke (4 ROIs)
• Vertikalbewegung ~15 mm bei Zugüberfahrt
• STD der RIM Resultate @ 14 fps:~0.6 mm (vertikal)
10.10.2012SLE_20121010(Hannover)_V01.pptx
(1)
(2)
(3)
(4)

13
• Theoretischer Amplitudenabfall für Stahlfläche (Abstand: 1,4m)
10.10.2012SLE_20121010(Hannover)_V01.pptx
Erwartete Präzision der ROIs• Präzision der geschätzten z-Translation hängt ab von:
Amplitude ROI-Größe
Dimension ROI-Brücke: ~ 4000 (63x63) Pixel
Empirische Std.
Prädizierte Std.
Ursache: Korrelation der Distanzabweichungen
Stimmt NICHT überein!
• ROIs: quadratisch um zentrales Pixel

14
• Berechnung der Korrelationen für jedes ROI, bezogen auf das jeweilige Referenzpixel
Korrelation der Distanzabweichungen
10.10.2012SLE_20121010(Hannover)_V01.pptx
(1)
(2)
(3)
(4)
ROI μρ(1) ~ 2%(2) ~ 2.5%(3) ~ 8%(4) ~ 5.5%
ReferenzpixelMittelbildung

15
• Neuberechnung der Prädiktion mit Berücksichtigung der Korrelation
Erwartete Präzision der ROIs (1)
10.10.2012SLE_20121010(Hannover)_V01.pptx
Mit Korrelation (2%)
ohne Korrelation
Mit Korrelation (8%)
Realistische Prädiktion der Standardabweichung
16
Zusammenfassung
10.10.2012SLE_20121010(Hannover)_V01.pptx
• Distanzkameras liefern kompletten „Schnappschuss der Umgebung“
• Erreichbare Genauigkeit für 3D-Koordinaten (Einzelpunkt) im mm-cm Bereich
• Bewegungen mit mm-Größenordnung und Frequenz von einigen Hz nachweisbar
• Mögliche Anwendung: Überwachung von Oberflächendeformationen z.B. an Bau- oder Maschinenteilen

17
10.10.2012SLE_20121010(Hannover)_V01.pptx
Vielen Dank für Ihre Aufmerksamkeit!
Vielen Dank für Ihre Aufmerksamkeit!
Related Documents











