IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010 2691 Model Predictive Control of Multilevel Cascaded H-Bridge Inverters Patricio Cortés, Member, IEEE, Alan Wilson, Samir Kouro, Member, IEEE, Jose Rodriguez, Senior Member, IEEE, and Haitham Abu-Rub, Senior Member, IEEE Abstract—This paper presents a model predictive current con- trol algorithm that is suitable for multilevel converters and its application to a three-phase cascaded H-bridge inverter. This control method uses a discrete-time model of the system to predict the future value of the current for all voltage vectors, and selects the vector which minimizes a cost function. Due to the large number of voltage vectors available in a multilevel inverter, a large number of calculations are needed, making difficult the implemen- tation of this control in a standard control platform. A modified control strategy that considerably reduces the amount of calcu- lations without affecting the system’s performance is proposed. Experimental results for five- and nine-level inverters validate the proposed control algorithm. Index Terms—Cascaded H-bridge (CHB), current control, in- verters, model predictive control (MPC), multilevel inverters, pre- dictive control. I. I NTRODUCTION M ULTILEVEL converter technology is a very efficient alternative for medium-voltage and high-power appli- cations and also for other applications where high-quality voltages and currents are required [1], [2]. These converters have several advantages over the traditional converters: oper- ation with voltages over the switching device rating, reduced common-mode voltages, and smaller voltage changes (dv/dt). The application of multilevel converters covers a wide range that includes the following: high-power drives [3], active filters [4], and other industrial applications like conveyor systems, fans, pumps, traction, and ship propulsion. There are three well-established topologies of multilevel inverters: neutral point clamped (NPC), flying capacitor, and cascaded H-bridge (CHB) [5]. This paper deals with the CHB inverter, which consists of single-phase H-bridge inverters in series connection with independent dc links of equal voltage, to provide the total output voltage to the load [6]. The classical Manuscript received March 16, 2009; revised August 24, 2009 and November 24, 2009; accepted November 26, 2009. Date of publication February 8, 2010; date of current version July 14, 2010. This work was supported in part by Universidad Tecnica Federico Santa Maria and in part by the Chilean National Fund of Scientific and Technological Development (FONDECYT) under Grant 1080443. P. Cortés, A. Wilson, and J. Rodriguez are with the Electronics Engineering Department, Universidad Tecnica Federico Santa Maria, Valparaíso 2390123, Chile (e-mail: patricio.cortes@usm; [email protected]). S. Kouro is with the Department of Electrical and Computer Engi- neering, Ryerson University, Toronto, ON M5B 2K3, Canada (e-mail: [email protected]). H. Abu-Rub is with Texas A&M University at Qatar, Doha 23874, Qatar (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIE.2010.2041733 strategies for control and modulation of CHB inverters use linear control and phase-shifted pulsewidth modulation [7] or space vector modulation [8], [9] modulation in order to generate the switching signals for controlling the converter. Other mod- ulation methods for low switching frequency have also been proposed [10]–[12]. In recent years, new control strategies have been studied for the current control of power inverters. Among them, model pre- dictive control (MPC) has been applied for the control of power converters due to its several advantages, like fast dynamic response, easy inclusion of nonlinearities and constraints of the system, and the flexibility to include other system requirements in the controller [13]–[15]. MPC considers a model of the system in order to predict the future behavior of the system over a horizon in time. A cost function represents the desired behavior of the system. MPC is an optimization problem where a sequence of future actuations is obtained by minimizing the cost function. The first element of the sequence is applied, and all the calculation is repeated every sample period. Due to the fast sampling times used in the control of power converters, solving the optimization problem of MPC online is not practical. One approach is to use an explicit solution of MPC, solving the optimization problem offline. The resulting controller is a search tree or a lookup table and can be implemented without big computational effort. This solution has been used for the control of a dc–dc converter [16] and a drive system [17]. Considering that power converters are systems with a finite number of states, given by the possible combinations of the state of the switching devices, the MPC optimization problem can be simplified and reduced to the prediction of the behavior of the system for each possible state. Then, each prediction is evaluated using the cost function, and the state that minimizes it is selected [18]. This is a different approach that has been successfully applied for the current control in a three-phase inverter [13], [19] and a matrix converter [20], [21], power control in an active front-end rectifier [22], and torque and flux control of an induction machine [23]–[26]. In multilevel converters, MPC has been applied for a three- level NPC inverter [27], a flying capacitor converter [28], and an asymmetric 27-level CHB inverter [29] using all the switching states of the system. An MPC approach for selective harmonic elimination is proposed in [30]. However, in a sym- metric CHB, large number of switching states and redundancies are available. Hence, it is difficult to implement the control algorithm using standard signal processors, particularly when high switching frequency is required. 0278-0046/$26.00 © 2010 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010 2691
Model Predictive Control of Multilevel CascadedH-Bridge Inverters
Patricio Cortés, Member, IEEE, Alan Wilson, Samir Kouro, Member, IEEE, Jose Rodriguez, Senior Member, IEEE,and Haitham Abu-Rub, Senior Member, IEEE
Abstract—This paper presents a model predictive current con-trol algorithm that is suitable for multilevel converters and itsapplication to a three-phase cascaded H-bridge inverter. Thiscontrol method uses a discrete-time model of the system to predictthe future value of the current for all voltage vectors, and selectsthe vector which minimizes a cost function. Due to the largenumber of voltage vectors available in a multilevel inverter, a largenumber of calculations are needed, making difficult the implemen-tation of this control in a standard control platform. A modifiedcontrol strategy that considerably reduces the amount of calcu-lations without affecting the system’s performance is proposed.Experimental results for five- and nine-level inverters validate theproposed control algorithm.
Index Terms—Cascaded H-bridge (CHB), current control, in-verters, model predictive control (MPC), multilevel inverters, pre-dictive control.
I. INTRODUCTION
MULTILEVEL converter technology is a very efficientalternative for medium-voltage and high-power appli-
cations and also for other applications where high-qualityvoltages and currents are required [1], [2]. These convertershave several advantages over the traditional converters: oper-ation with voltages over the switching device rating, reducedcommon-mode voltages, and smaller voltage changes (dv/dt).The application of multilevel converters covers a wide rangethat includes the following: high-power drives [3], active filters[4], and other industrial applications like conveyor systems,fans, pumps, traction, and ship propulsion.
There are three well-established topologies of multilevelinverters: neutral point clamped (NPC), flying capacitor, andcascaded H-bridge (CHB) [5]. This paper deals with the CHBinverter, which consists of single-phase H-bridge inverters inseries connection with independent dc links of equal voltage, toprovide the total output voltage to the load [6]. The classical
Manuscript received March 16, 2009; revised August 24, 2009 andNovember 24, 2009; accepted November 26, 2009. Date of publicationFebruary 8, 2010; date of current version July 14, 2010. This work wassupported in part by Universidad Tecnica Federico Santa Maria and in partby the Chilean National Fund of Scientific and Technological Development(FONDECYT) under Grant 1080443.
P. Cortés, A. Wilson, and J. Rodriguez are with the Electronics EngineeringDepartment, Universidad Tecnica Federico Santa Maria, Valparaíso 2390123,Chile (e-mail: patricio.cortes@usm; [email protected]).
S. Kouro is with the Department of Electrical and Computer Engi-neering, Ryerson University, Toronto, ON M5B 2K3, Canada (e-mail:[email protected]).
H. Abu-Rub is with Texas A&M University at Qatar, Doha 23874, Qatar(e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2010.2041733
strategies for control and modulation of CHB inverters uselinear control and phase-shifted pulsewidth modulation [7] orspace vector modulation [8], [9] modulation in order to generatethe switching signals for controlling the converter. Other mod-ulation methods for low switching frequency have also beenproposed [10]–[12].
In recent years, new control strategies have been studied forthe current control of power inverters. Among them, model pre-dictive control (MPC) has been applied for the control of powerconverters due to its several advantages, like fast dynamicresponse, easy inclusion of nonlinearities and constraints of thesystem, and the flexibility to include other system requirementsin the controller [13]–[15]. MPC considers a model of thesystem in order to predict the future behavior of the systemover a horizon in time. A cost function represents the desiredbehavior of the system. MPC is an optimization problem wherea sequence of future actuations is obtained by minimizing thecost function. The first element of the sequence is applied, andall the calculation is repeated every sample period.
Due to the fast sampling times used in the control ofpower converters, solving the optimization problem of MPConline is not practical. One approach is to use an explicitsolution of MPC, solving the optimization problem offline. Theresulting controller is a search tree or a lookup table and can beimplemented without big computational effort. This solutionhas been used for the control of a dc–dc converter [16] and adrive system [17].
Considering that power converters are systems with a finitenumber of states, given by the possible combinations of thestate of the switching devices, the MPC optimization problemcan be simplified and reduced to the prediction of the behaviorof the system for each possible state. Then, each prediction isevaluated using the cost function, and the state that minimizesit is selected [18]. This is a different approach that has beensuccessfully applied for the current control in a three-phaseinverter [13], [19] and a matrix converter [20], [21], powercontrol in an active front-end rectifier [22], and torque and fluxcontrol of an induction machine [23]–[26].
In multilevel converters, MPC has been applied for a three-level NPC inverter [27], a flying capacitor converter [28],and an asymmetric 27-level CHB inverter [29] using all theswitching states of the system. An MPC approach for selectiveharmonic elimination is proposed in [30]. However, in a sym-metric CHB, large number of switching states and redundanciesare available. Hence, it is difficult to implement the controlalgorithm using standard signal processors, particularly whenhigh switching frequency is required.
0278-0046/$26.00 © 2010 IEEE
2692 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
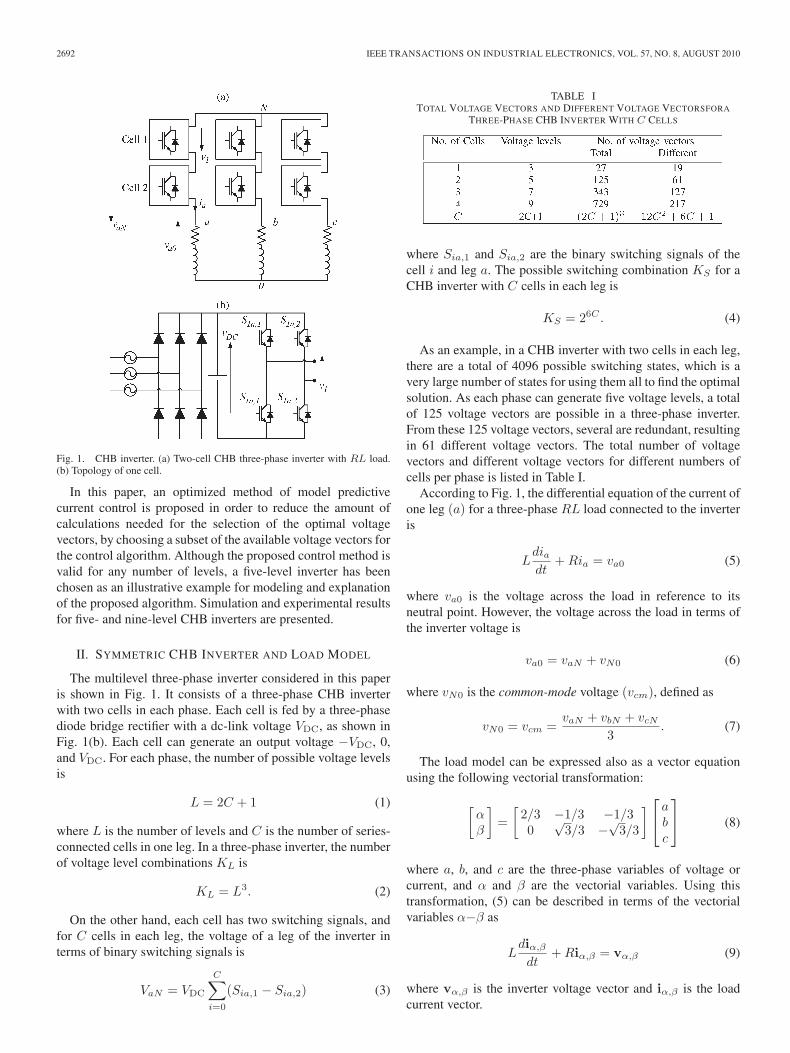
Fig. 1. CHB inverter. (a) Two-cell CHB three-phase inverter with RL load.(b) Topology of one cell.
In this paper, an optimized method of model predictivecurrent control is proposed in order to reduce the amount ofcalculations needed for the selection of the optimal voltagevectors, by choosing a subset of the available voltage vectors forthe control algorithm. Although the proposed control method isvalid for any number of levels, a five-level inverter has beenchosen as an illustrative example for modeling and explanationof the proposed algorithm. Simulation and experimental resultsfor five- and nine-level CHB inverters are presented.
II. SYMMETRIC CHB INVERTER AND LOAD MODEL
The multilevel three-phase inverter considered in this paperis shown in Fig. 1. It consists of a three-phase CHB inverterwith two cells in each phase. Each cell is fed by a three-phasediode bridge rectifier with a dc-link voltage VDC, as shown inFig. 1(b). Each cell can generate an output voltage −VDC, 0,and VDC. For each phase, the number of possible voltage levelsis
L = 2C + 1 (1)
where L is the number of levels and C is the number of series-connected cells in one leg. In a three-phase inverter, the numberof voltage level combinations KL is
KL = L3. (2)
On the other hand, each cell has two switching signals, andfor C cells in each leg, the voltage of a leg of the inverter interms of binary switching signals is
VaN = VDC
C∑i=0
(Sia,1 − Sia,2) (3)
TABLE ITOTAL VOLTAGE VECTORS AND DIFFERENT VOLTAGE VECTORSFORA
THREE-PHASE CHB INVERTER WITH C CELLS
where Sia,1 and Sia,2 are the binary switching signals of thecell i and leg a. The possible switching combination KS for aCHB inverter with C cells in each leg is
KS = 26C . (4)
As an example, in a CHB inverter with two cells in each leg,there are a total of 4096 possible switching states, which is avery large number of states for using them all to find the optimalsolution. As each phase can generate five voltage levels, a totalof 125 voltage vectors are possible in a three-phase inverter.From these 125 voltage vectors, several are redundant, resultingin 61 different voltage vectors. The total number of voltagevectors and different voltage vectors for different numbers ofcells per phase is listed in Table I.
According to Fig. 1, the differential equation of the current ofone leg (a) for a three-phase RL load connected to the inverteris
Ldiadt
+ Ria = va0 (5)
where va0 is the voltage across the load in reference to itsneutral point. However, the voltage across the load in terms ofthe inverter voltage is
va0 = vaN + vN0 (6)
where vN0 is the common-mode voltage (vcm), defined as
vN0 = vcm =vaN + vbN + vcN
3. (7)
The load model can be expressed also as a vector equationusing the following vectorial transformation:
[αβ
]=
[2/3 −1/3 −1/30
√3/3 −
√3/3
]⎡⎣ a
bc
⎤⎦ (8)
where a, b, and c are the three-phase variables of voltage orcurrent, and α and β are the vectorial variables. Using thistransformation, (5) can be described in terms of the vectorialvariables α−β as
Ldiα,β
dt+ Riα,β = vα,β (9)
where vα,β is the inverter voltage vector and iα,β is the loadcurrent vector.

CORTÉS et al.: MODEL PREDICTIVE CONTROL OF MULTILEVEL CASCADED H-BRIDGE INVERTERS 2693
Fig. 2. Block diagram of the predictive control algorithm.
III. PREDICTIVE CONTROL ALGORITHM
A. Discrete Model and Prediction
The main idea of the predictive current control scheme usedin this paper is to predict the behavior of the load current foreach possible voltage vector generated by the inverter. Theprediction of the current is based on the discretized model ofthe system.
Approximating the derivative di/dt in (9) by
diα,β
dt≈ iα,β [k + 1] − iα,β [k]
Ts(10)
and substituting it in (9), the following expression is obtainedfor the future load current vector:
i[k + 1]α,β =Ts
L
(vα,β [k]−iα,β [k]
(R − L
Ts
)). (11)
This equation will be used in the controller to predict thefuture value of the load current for a given voltage vector.
B. Voltage Vector Selection
For the selection of the appropriate voltage vectors forcurrent control, the current prediction is evaluated using thefollowing cost function:
g[k + 1]= |i∗α[k + 1] − iα[k + 1]| +∣∣i∗β [k + 1] − iβ [k + 1]
∣∣(12)
where i∗α,β [k + 1] is the reference current vector prediction.For sufficiently small sampling times, it can be assumed thati∗α,β [k + 1] ≈ i∗α,β [k]. For larger sample times, extrapolation ofthe reference is needed.
The cost function (12) is evaluated for each possible voltagevector, and the one that minimizes it, is selected and applied tothe load. This means that (11) and (12) are calculated 125 timesfor a 5-level inverter in order to obtain the optimal solution.
A block diagram of the predictive current control is shown inFig. 2. Here, the measured currents are used for the predictionof the n future values of the load currents, corresponding tothe n possible voltage vectors, where n = 125 for a five-levelinverter. These predictions are evaluated by the cost function,and the voltage vector which minimizes this function is selectedand applied.
Several different formulations of the cost function are pos-sible. Depending on the specific application, it is possible toinclude reduction of the switching frequency, spectrum shaping,and others [18]. However, a very simple cost function will beconsidered in this paper, focusing in the problem of reducing
Fig. 3. Voltage vectors for a two-cell CHB three-phase inverter. Adjacentvoltage vectors referred to vαβ [k].
the high amount of calculations required to apply the MPC in amultilevel inverter.
IV. PREDICTIVE CONTROL WITH REDUCED
NUMBER OF CALCULATIONS
As can be seen in the previous section, for a CHB inverter,the number of voltage vectors to be evaluated in order to obtainthe optimal solution is very high, making difficult to implementthis control algorithm in a standard control platform. In thispaper, it is proposed to reduce the set of voltage vectors to beevaluated. First, the redundant voltage vectors are eliminated bychoosing the ones that generate the minimum common-modevoltage. Then, a subset of possible voltage vectors is selected,considering the information about the previously applied volt-age vector.
A. Elimination of Redundant Voltage Vectors
As presented in Section I, the five-level inverter generates125 voltage vectors, but with the vectorial transformationshown in (9), there are some redundant vectors generated withdifferent voltage levels. With C cells in each leg of the CHBinverter, the amount of nonredundant voltage vectors is
V = 12C2 + 6C + 1. (13)
In Fig. 3, the voltage vectors and the number of equivalentvoltage levels for a five-level CHB inverter, with 61 differ-ent voltage vectors, are shown. For the current control, onlyone voltage level state for each vector is necessary. The selec-tion criterion is to select the voltage level states that minimizethe common voltage vector, as defined in (7).
This elimination of redundant vector does not affect thebehavior of the current control, because the possible voltagevectors that can be applied to the load do not change. However,with this modification, the inverter voltage waveforms are im-proved, and the common-mode voltage is considerably reduced.
Note that voltage vectors in the outer hexagon have noredundancies and some of them generate high common-modevoltage. If required, these high common-mode voltage values

2694 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
can be easily avoided by not including those voltage vectors inthe subset to be evaluated, or by including the common-modevoltage in the cost function in order to minimize it, as presentedin [31] for a matrix converter.
B. Subset of Adjacent Vectors
Although, eliminating the redundant vectors, the number ofcalculations is reduced, it is still very high, and it depends onthe number of voltage levels of the converter. With sinusoidalcurrent references, the voltage vector applied to the load isa rotating vector in steady state. Because of that, it can beassumed that the voltage vector applied during a samplinginterval is very similar to the one applied during the previousinterval. In this way, it is possible to reduce the set of voltagevectors to be evaluated to the voltage vectors that are nearest tothe last applied vector, as shown in Fig. 3.
For the calculation of the vectors adjacent to the last appliedvector, the distance between vectors can be calculated with thefollowing function:
d(vx,vy) =√
(vx,α − vy,α)2 + (vx,β − vy,β)2. (14)
If vx is near to vy, the distance should be equal or less than2VDC/3. The calculation of distance is made offline (not inreal time), and it is stored in a database for all possible voltagevectors for using in the predictive control algorithm. For eachone of the different voltage vectors, a list of seven adjacentvectors is defined. Then, the predictive algorithm will evaluateonly the voltage vectors from this list.
In this way, the number of calculations is reduced to onlyseven predictions, irrespective of the number of cells. This isthe same amount of calculation as needed for the predictivecontrol of a two-level inverter presented in [13]. With thistechnique, the predictive control algorithm can be implementedfor multilevel converters using a standard control platform.
The predictive control algorithm is detailed as a flow diagramin Fig. 4, where nv is the number of adjacent vectors of vn[k].In this case, one and only one switching state is needed for thegeneration of the corresponding voltage level state.
This modification introduces the advantage of smaller dv/dt,due to the transitions between adjacent vectors.
A plot of the cost function for all voltage vectors is shownin Fig. 5. The minimum value of this function depends on thereference and load current vectors. It can be observed that thisfunction is a convex function. Evaluating a subset of adjacentvectors will select a vector that, if not the optimal, is in the rightdirection and, in successive steps, will converge to the optimalvoltage vector that minimizes the load current error.
Other criteria for the selection of a subset of vectors to beevaluated are possible, such as limiting the voltage variationof each phase, limiting the switching transitions, and others.However, the use of adjacent vectors and the elimination ofredundancies, presented in this paper, have shown to be avery simple and effective solution to reduce the number ofcalculations, and present a very good performance, as will beshown in the next sections.
Fig. 4. Flow diagram of the predictive control algorithm with reduced numberof calculations.
Fig. 5. Cost function g evaluated for all voltage vectors.
V. PERFORMANCE EVALUATION: SIMULATION RESULTS
Simulations of a CHB inverter were carried out usingMatlab/Simulink. The load used for simulation and experimen-tal results is an RL load (47 [Ω] and 15 [mH]) with a 0.98 powerfactor, VDC = 45 [V] is considered for each cell, and a samplingtime Ts = 200 [μs]. A two-cell five-level inverter and a four-cell

CORTÉS et al.: MODEL PREDICTIVE CONTROL OF MULTILEVEL CASCADED H-BRIDGE INVERTERS 2695
Fig. 6. Load current in one phase for a step in the reference amplitude.(a) Load current and reference. (b) Detail of the reference step, showing theload current when all voltage vectors are considered (il all), and the adjacentvectors (il adjacent).
Fig. 7. Inverter voltages for a step in the amplitude of the reference current.(a) MPC considering all vectors. (b) MPC considering adjacent vectors.
nine-level inverter have been considered to test the proposedpredictive control algorithm.
The behavior of the predictive current control for a step inthe amplitude of the reference current is shown in Fig. 6. It isshown in Fig. 6(a) that both methods, considering all vectorsand the proposed method with a reduced set of vectors, havevery good reference tracking.
It can be observed in the detailed view of the step changeinstant, shown in Fig. 6(b), that reference tracking of themethod using only the seven adjacent vectors is slightly slowerthan the algorithm with all the 125 vectors. This difference isbecause the proposed method does not allow for big changesin the output voltage, as can be seen in Fig. 7. When allvectors are considered, extreme voltage changes are possible.In contrast, when only adjacent voltage vectors are considered,voltage changes are limited to one level during each samplingtime. This tradeoff between a slight reduction of the dynamicperformance and the improvement in power quality is not anegative characteristic. On the contrary, for high-power motordrives, the reduction of the values of dv/dt greatly improvesthe motor life, while the small reduction in dynamic response isbarely noticeable due to the inertias of the load.
Fig. 8. Inverter voltages for a step change in the amplitude of the referencecurrent when all 125 voltage vectors are evaluated. (a) Inverter phase to neutralvoltage. (b) Load voltage. (c) Common-mode voltage.
Fig. 9. Inverter voltages for a step in the amplitude of the reference currentwhen only adjacent vectors are evaluated. (a) Inverter phase to neutral voltage.(b) Load voltage. (c) Common-mode voltage.
Inverter voltages for the same reference step are shownin Fig. 8 for the predictive current control considering all125 voltage vectors. It can be observed that if the common-mode voltage is not considered in the selection of the optimalvoltage vector, the waveform of the inverter voltage is notsymmetrical and the common-mode voltage is high. In contrast,when redundancies have been eliminated by selecting only thevoltage vectors with lower common-mode voltages and usingthe subset of adjacent vectors, the inverter voltage waveformis symmetrical, and the common-mode voltage is considerablyreduced, as shown in Fig. 9.
The same control algorithm can be easily extended to aconverter with any number of levels. In Fig. 10, the steady-state operation of five- and nine-level inverters is shown. In both

2696 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
Fig. 10. Inverter phase to neutral voltage and load current in steady state.(a) Five-level inverter. (b) Nine-level inverter.
Fig. 11. Effect of model parameter errors. Load current in one phase for a stepin the reference amplitude using adjacent vectors. (a) No error. (b) −50% errorin the value of L. (c) +50% error in the value of L.
cases, the proposed MPC algorithm considering the subset ofnear vectors has been used.
As the proposed control method is based on a model ofthe load, the effect of errors in the parameter values of themodel has been studied. Due to the nonlinear nature of thecontroller, it is not possible to perform a simple analyticalverification of robustness. The behavior of the system withdifferent errors in the value of the inductance has been evaluatedusing simulations. Results are shown in Fig. 11, where the valueof the inductance used in the predictive model has been variedfrom −50% to 50% while the load inductance value has beenkept constant. It can be observed that, even with large errors,the load current is controlled while a change in the ripple isobserved when the inductance value is overestimated.
The switching frequency in this kind of predictive controllersis variable. However, it is limited to a maximum of half thesampling frequency. In this case, as the sampling frequency isfs = 5 kHz, the switching frequency is limited to 2.5 kHz. Theaverage switching frequency has been measured for differentoperating conditions, resulting between 425 and 500 Hz for
Fig. 12. Load current in one phase for a step in the reference amplitude usingadjacent vectors. (a) Simulation. (b) Experimental.
Fig. 13. Experimental results: Inverter voltage and load current in steady state.(a) For a five-level inverter. (b) For a nine-level inverter.
each insulated-gate bipolar transistor. If a lower switchingfrequency is required, it is possible to reduce it by includinga cost to the change of the switching state, as presented in [27].
VI. EXPERIMENTAL RESULTS
The control algorithm was implemented in a dSpace platformand a 10-kW CHB inverter with an RL load. The inverter canbe configured as a five-level inverter with two cells in eachphase and as a nine-level inverter with four cells in each phase.Experimental results with the same parameter values as those inthe simulation in Section V were performed to validate theoryand simulation. Due to the high amount of calculations requiredby the predictive algorithm using all possible vectors, only thealgorithm using the subset of adjacent vectors is implementedfor the desired sampling frequency.
The load current in one phase for a step change in theamplitude of the reference current is shown in Fig. 12. Here,experimental results are compared with simulation results, ob-taining very similar performance.
Operation in steady state is shown in Fig. 13 for both five-and nine-level inverters. Inverter voltages are sinusoidal in both

CORTÉS et al.: MODEL PREDICTIVE CONTROL OF MULTILEVEL CASCADED H-BRIDGE INVERTERS 2697
Fig. 14. Experimental results: Inverter voltage and load current for a step inthe amplitude of the reference current. (a) For a five-level inverter. (b) For anine-level inverter.
Fig. 15. Experimental results: (Black) Common-mode voltage and (gray)inverter voltage for a step in the amplitude of the reference current. (a) Fora five-level inverter. (b) For a nine-level inverter.
cases, and switching frequency is very low for the nine-levelinverter. Load currents present very low distortion.
Results for a step change in the amplitude of the referencecurrent are shown in Fig. 14. Load current amplitude followsthis change with fast dynamics and without overshoot. It can beobserved in Fig. 15 that the common-mode voltage is kept verylow, even during transients.
The spectrum of the load voltage for a five-level inverter isshown in Fig. 16. This plot shows that the spectral content ofthe load voltage is spread over a wide range of frequencies.However, the magnitude of each component is low, as canbe seen in Fig. 16(b), and the magnitude of the lower orderharmonics is very low, as shown in Fig. 16(a). As explainedin the previous section, the switching frequency is variable butlimited to a maximum of 2.5 kHz. It can be seen in the figurethat the spectral content is concentrated below this maximumfrequency.
Fig. 16. Experimental results: Load voltage spectrum for a five-level inverter.
VII. CONCLUSION
An MPC algorithm for CHB multilevel three-phase invertershas been presented. The proposed strategy considers a subsetof all possible voltage vectors in order to reduce the numberof calculations and make it suitable for implementation in astandard control platform. This method can be applied to anymultilevel inverter with a high number of levels and switchingstates.
The proposed predictive control presents very good referencetracking and reduced common-mode voltages, with a fast cal-culation algorithm. By considering the adjacent vectors, onlyseven predictions have to be calculated, irrespective of the num-ber of levels of the inverter. The proposed algorithm requiresthe same amount of calculations as the control of a two-levelinverter. The selection among the adjacent vectors stronglyreduces the dv/dt at the load side, while only slightly affectingthe dynamic performance. This is an affordable tradeoff whenconsidering its application in high-power motor drives, whereCHB inverters are used.
The current control of the CHB inverter has been presented inthis paper. However, the proposed control method can be easilyextended to include additional requirements. The proposedcontrol method can also be applied to other multilevel convertertopologies.
Future work on this topic considers modifications to the con-trol presented in this paper, including balancing of the powersharing among all cells, reduction of the switching frequency,and reduction of common-mode voltage dv/dt. The proposedcontroller structure is very flexible and open to include otherrequirements and constraints, depending on the specific appli-cation and the converter topology.
REFERENCES
[1] J. Rodriguez, J.-S. Lai, and F. Z. Peng, “Multilevel inverters: A surveyof topologies, controls, and applications,” IEEE Trans. Ind. Electron.,vol. 49, no. 4, pp. 724–738, Aug. 2002.
[2] J. Rodriguez, L. G. Franquelo, S. Kouro, J. I. Leon, R. C. Portillo,M. A. M. Prats, and M. A. Perez, “Multilevel converters: An enablingtechnology for high-power applications,” Proc. IEEE, vol. 97, no. 11,pp. 1786–1817, Nov. 2009.
[3] L. Tolbert, F. Z. Peng, and T. Habetler, “Multilevel converters for largeelectric drives,” IEEE Trans. Ind. Electron., vol. 35, no. 1, pp. 36–44,Jan./Feb. 1999.

2698 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
[4] H. Rudnick, J. Dixon, and L. Moran, “Delivering clean and pure power,”IEEE Power Energy Mag., vol. 1, no. 5, pp. 32–40, Sep./Oct. 2003.
[5] J. Rodriguez, S. Bernet, B. Wu, J. O. Pontt, and S. Kouro, “Multi-level voltage-source-converter topologies for industrial medium-voltagedrives,” IEEE Trans. Ind. Electron., vol. 54, no. 6, pp. 2930–2945,Dec. 2007.
[6] M. Marchesoni, M. Mazzucchelli, and S. Tenconi, “A non conventionalpower converter for plasma stabilization,” in Proc. 19th IEEE PowerElectron. Spec. Conf., Apr. 1988, vol. 1, pp. 122–129.
[7] B. P. McGrath and D. G. Holmes, “Multicarrier PWM strategies formultilevel inverters,” IEEE Trans. Ind. Electron., vol. 49, no. 4, pp. 858–867, Aug. 2002.
[8] N. Celanovic and D. Boroyevich, “A fast space-vector modulation al-gorithm for multilevel three-phase converters,” IEEE Trans. Ind. Appl.,vol. 37, no. 2, pp. 637–641, Mar./Apr. 2001.
[9] J. I. Leon, S. Vazquez, A. J. Watson, L. G. Franquelo, P. W. Wheeler, andJ. M. Carrasco, “Feed-forward space vector modulation for single-phasemultilevel cascaded converters with any dc voltage ratio,” IEEE Trans.Ind. Electron., vol. 56, no. 2, pp. 315–325, Feb. 2009.
[10] J. Rodriguez, J. Pontt, P. Correa, P. Cortes, and C. Silva, “A new modu-lation method to reduce common-mode voltages in multilevel inverters,”IEEE Trans. Ind. Electron., vol. 51, no. 4, pp. 834–839, Aug. 2004.
[11] Y. Liu, H. Hong, and A. Huang, “Real-time calculation of switchingangles minimizing THD for multilevel inverters with step modulation,”IEEE Trans. Ind. Electron., vol. 56, no. 2, pp. 285–293, Feb. 2009.
[12] Z. Du, L. M. Tolbert, J. N. Chiasson, and B. Ozpineci, “Reducedswitching-frequency active harmonic elimination for multilevel con-verters,” IEEE Trans. Ind. Electron., vol. 55, no. 4, pp. 1761–1770,Apr. 2008.
[13] J. Rodriguez, J. Pontt, C. A. Silva, P. Correa, P. Lezana, P. Cortes, andU. Ammann, “Predictive current control of a voltage source inverter,”IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 495–503, Feb. 2007.
[14] P. Cortes, J. Rodriguez, D. E. Quevedo, and C. Silva, “Predictive currentcontrol strategy with imposed load current spectrum,” IEEE Trans. PowerElectron., vol. 23, no. 2, pp. 612–618, Mar. 2008.
[15] P. Cortes, M. P. Kazmierkowski, R. M. Kennel, D. E. Quevedo, andJ. Rodriguez, “Predictive control in power electronics and drives,” IEEETrans. Ind. Electron., vol. 55, no. 12, pp. 4312–4324, Dec. 2008.
[16] A. G. Beccuti, S. Mariethoz, S. Cliquennois, S. Wang, and M. Morari,“Explicit model predictive control of dc–dc switched-mode power sup-plies with extended Kalman filtering,” IEEE Trans. Ind. Electron., vol. 56,no. 6, pp. 1864–1874, Jun. 2009.
[17] M. Cychowski, K. Szabat, and T. Orlowska-Kowalska, “Constrainedmodel predictive control of the drive system with mechanical elasticity,”IEEE Trans. Ind. Electron., vol. 56, no. 6, pp. 1963–1973, Jun. 2009.
[18] S. Kouro, P. Cortes, R. Vargas, U. Ammann, and J. Rodriguez, “Modelpredictive control—A simple and powerful method to control powerconverters,” IEEE Trans. Ind. Electron., vol. 56, no. 6, pp. 1826–1838,Jun. 2009.
[19] J. Rodrıguez, J. Pontt, C. Silva, M. Salgado, S. Rees, U. Ammann,P. Lezana, R. Huerta, and P. Cortés, “Predictive control of a three-phaseinverter,” Electron. Lett., vol. 40, no. 9, pp. 561–562, Apr. 29, 2004.
[20] S. Muller, U. Ammann, and S. Rees, “New modulation strategy for amatrix converter with a very small mains filter,” in Proc. IEEE PowerElectron Spec. Conf., Acapulco, Mexico, 2003, [CD-ROM].
[21] S. Muller, U. Ammann, and S. Rees, “New time-discrete modulationscheme for matrix converters,” IEEE Trans. Ind. Electron., vol. 52, no. 6,pp. 1607–1615, Dec. 2005.
[22] P. Cortes, J. Rodriguez, P. Antoniewicz, and M. Kazmierkowski, “Directpower control of an AFE using predictive control,” IEEE Trans. PowerElectron., vol. 23, no. 5, pp. 2516–2523, Sep. 2008.
[23] J. Rodrıguez, J. Pontt, C. Silva, P. Cortés, S. Rees, and U. Ammann,“Predictive direct torque control of an induction machine,” in Proc. EPE-PEMC, Riga, Latvia, Sep. 2–4, 2004.
[24] H. Miranda, P. Cortes, J. I. Yuz, and J. Rodriguez, “Predictive torquecontrol of induction machines based on state-space models,” IEEE Trans.Ind. Electron., vol. 56, no. 6, pp. 1916–1924, Jun. 2009.
[25] T. Geyer, G. Papafotiou, and M. Morari, “Model predictive direct torquecontrol—Part I: Concept, algorithm, and analysis,” IEEE Trans. Ind. Elec-tron., vol. 56, no. 6, pp. 1894–1905, Jun. 2009.
[26] G. Papafotiou, J. Kley, K. G. Papadopoulos, P. Bohren, and M. Morari,“Model predictive direct torque control—Part II: Implementation andexperimental evaluation,” IEEE Trans. Ind. Electron., vol. 56, no. 6,pp. 1906–1915, Jun. 2009.
[27] R. Vargas, P. Cortes, U. Ammann, J. Rodriguez, and J. Pontt, “Predictivecontrol of a three-phase neutral-point-clamped inverter,” IEEE Trans. Ind.Electron., vol. 54, no. 5, pp. 2697–2705, Oct. 2007.
[28] P. Lezana, R. Aguilera, and D. E. Quevedo, “Model predictive controlof an asymmetric flying capacitor converter,” IEEE Trans. Ind. Electron.,vol. 56, no. 6, pp. 1839–1846, Jun. 2009.
[29] M. A. Perez, P. Cortes, and J. Rodriguez, “Predictive control algorithmtechnique for multilevel asymmetric cascaded H-bridge inverters,” IEEETrans. Ind. Electron., vol. 55, no. 12, pp. 4354–4361, Dec. 2008.
[30] S. Kouro, B. La Rocca, P. Cortes, S. Alepuz, B. Wu, and J. Rodriguez,“Predictive control based selective harmonic elimination with low switch-ing frequency for multilevel converters,” in Proc. IEEE Energy Conv.Congr. Expo., Sep. 2009, pp. 3130–3136.
[31] R. Vargas, U. Ammann, J. Rodriguez, and J. Pontt, “Predictive strategy tocontrol common-mode voltage in loads fed by matrix converters,” IEEETrans. Ind. Electron., vol. 55, no. 12, pp. 4372–4380, Dec. 2008.
Patricio Cortés (S’05–M’08) received the Engi-neer and M.Sc. degrees in electronic engineeringfrom the Universidad Técnica Federico Santa María(UTFSM), Valparaíso, Chile, in 2004 and the Ph.D.degree from UTFSM in 2008.
In 2003, he joined the Electronics Engineering De-partment, UTFSM, where he is currently a ResearchAssociate. His main research interests are powerelectronics, adjustable-speed drives, and predictivecontrol.
Dr. Cortés received the Best Paper Award from theIEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS in 2007.
Alan Wilson was born in Villa Alemana, Chile, in1984. He received the B.S. and M.S. degrees in elec-tronics engineering from the Universidad TécnicaFederico Santa María (UTFSM), Valparaíso, Chile,in 2010.
He is currently a Research Assistant with the De-partment of Electronics Engineering, UTFSM. Hisresearch interests include multilevel voltage sourceinverters, predictive control of power converters, anddevelopment of control systems for power convertersbased on field-programmable gate array and DSPs.
Samir Kouro (S’04–M’08) was born in Valdivia,Chile, in 1978. He received the M.Sc. and Ph.D.degrees in electronics engineering from the Uni-versidad Técnica Federico Santa María (UTFSM),Valparaíso, Chile, in 2004 and 2008, respectively.
He joined the Electronics Engineering Depart-ment, UTFSM, as Research Assistant in 2004 andbecame an Associate Researcher in 2008. Since2009, he has been a Postdoctoral Fellow withRyerson University, Toronto, ON, Canada. Hismain research interests include power converters,
adjustable-speed drives, and renewable energy power conversion systems.Dr. Kouro was distinguished as the youngest researcher of the Chilean
National Fund of Scientific and Technological Development (FONDECYT) in2004. He also received the Best Paper Award from IEEE Industrial ElectronicsMagazine in 2008.

CORTÉS et al.: MODEL PREDICTIVE CONTROL OF MULTILEVEL CASCADED H-BRIDGE INVERTERS 2699
Jose Rodriguez (M’81–SM’94) received the Engi-neer degree in electrical engineering from the Uni-versidad Técnica Federico Santa María, Valparaíso,Chile, in 1977 and the Dr. Ing. degree in electricalengineering from the University of Erlangen, Erlan-gen, Germany, in 1985.
Since 1977, he has been with the Departmentof Electronics Engineering, University Técnica Fed-erico Santa María, where he is currently a Professor.From 2001 to 2004, he was the Director of theDepartment of Electronics Engineering of the same
university. From 2004 to 2005, he was the Vice Rector of Academic Affairs,and since 2005, he has also been the Rector of the same university. Duringhis sabbatical leave in 1996, he was responsible for the Mining Division ofSiemens Corporation, Santiago, Chile. He has extensive consulting experiencein the mining industry, particularly in the application of large drives suchas cycloconverter-fed synchronous motors for semiautogenous grinding mills,high-power conveyors, and controlled ac drives for shovels and power-qualityissues. He has directed more than 40 R&D projects in the field of industrialelectronics. He has coauthored more than 250 journal and conference papersand contributed one book chapter. His research group has been recognizedas one of the two centers of excellence in engineering in Chile from 2005 to2008. His main research interests include multilevel inverters, new convertertopologies, control of power converters, and adjustable-speed drives.
Dr. Rodriguez has been an active Associate Editor of the IEEETRANSACTIONS ON POWER ELECTRONICS and the IEEE TRANSACTIONS
ON INDUSTRIAL ELECTRONICS since 2002. He has served as a Guest Editorfor the IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS in six instances[e.g., Special Sections on Matrix Converters (in 2002), Multilevel Inverters (in2002), Modern Rectifiers (in 2005), High Power Drives (in 2007), PredictiveControl of Power Converters and Drives (in 2008), and Multilevel Inverters (in2009)]. He received the Best Paper Award from the IEEE TRANSACTIONS ON
INDUSTRIAL ELECTRONICS in 2007.
Haitham Abu-Rub (M’99–SM’07) received theM.Sc. degree in electrical engineering from GdyniaMarine Academy, Gdansk, Poland, in 1990 and thePh.D. degree from the Gdansk University of Tech-nology, Gdansk, in 1995.
He has held a position as an Assistant Professorand an Associate Professor at Birzeit University,Birzeit, Palestine, for eight years. For four years, hehad been appointed as the Chairman of ElectricalEngineering Department at the same university. Heis currently an Associate Professor with Texas A&M
University at Qatar, Doha, Qatar. His main research interests are the electricalmachine drives and power electronics.
Dr. Abu-Rub has earned many international prestigious awards, such asthe American Fulbright Scholarship (at Texas A&M University), the GermanAlexander von Humboldt Fellowship (at Wuppertal University, Wuppertal,Germany), the German DAAD Scholarship (at Bochum University,Bochum, Germany), the British Royal Society Scholarship (at SouthamptonUniversity, Southampton, U.K.), etc.
Related Documents




![Type-1 and Type-2 Fuzzy Logic Controller Based Multilevel ... · types of multilevel inverters: cascaded H-bridge, diode clamped, flying capacitors [6]. The advantages of multilevel](https://static.cupdf.com/doc/110x72/5f0b60b77e708231d43038d2/type-1-and-type-2-fuzzy-logic-controller-based-multilevel-types-of-multilevel.jpg)






