BIULETYN WAT VOL. LX, NR1, 2011 Model diagnostyczny złożonego obiektu technicznego STANISłAW NIZIńSKI, ARKADIUSZ RYCHLIK Uniwersytet Warmińsko-Mazurski, Wydział Nauk Technicznych, Katedra Budowy, Eksploatacji Pojazdów i Maszyn, 10-719 Olsztyn, ul. Oczapowskiego 11 Streszczenie: Istnieje problem diagnozowania, prognozowania i generowania stanu złożonych obiektów technicznych. W pracy przyjęto wojskowy pojazd mechaniczny, na przykład: czołg, bojo- wy wóz piechoty, kołowy lub gąsienicowy transporter opancerzony, jako złożony obiekt techniczny. Przedstawiono koncepcję modelu diagnostycznego takich obiektów technicznych. Słowa kluczowe: diagnostyka pojazdów mechanicznych, modele diagnostyczne, algorytmy diagno- zowania 1. Wprowadzenie Współczesne systemy złożonych obiektów technicznych są oparte na zasadach i modelach diagnostycznych, algorytmach diagnozowania, metodach i urządze- niach diagnostycznych, a także odpowiednich technologiach i infrastrukturze obsługiwania. Podstawą budowy efektywnych metod i urządzeń diagnostycznych są modele diagnostyczne i algorytmy diagnozowania. Istnieje wiele modeli diagnostycznych obiektów technicznych, takich jak: — analityczne: strukturalne modalne i odwrotne; — symptomowe: regresyjne rozpoznawania obrazów, topologiczne, diagno- styczno-niezawodnościowe, informacyjne. Jednak niewiele z tych modeli znajduje zastosowanie w procesach obsługiwania złożonych obiektów technicznych. Zatem istnieje potrzeba budowy modeli diagno- stycznych wojskowych pojazdów, które umożliwią ich wykorzystanie w praktycznej działalności utrzymywania pojazdów w stanie zdatności.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Biuletyn WAt Vol. lX, nr1, 2011
Model diagnostyczny złożonego obiektu technicznego
StaniSław nizińSki, arkadiuSz rychlik
uniwersytet warmińsko-Mazurski, wydział nauk technicznych, katedra Budowy, Eksploatacji Pojazdów i Maszyn,
10-719 Olsztyn, ul. Oczapowskiego 11
Streszczenie: istnieje problem diagnozowania, prognozowania i generowania stanu złożonych obiektów technicznych. w pracy przyjęto wojskowy pojazd mechaniczny, na przykład: czołg, bojo-wy wóz piechoty, kołowy lub gąsienicowy transporter opancerzony, jako złożony obiekt techniczny. Przedstawiono koncepcję modelu diagnostycznego takich obiektów technicznych.Słowa kluczowe: diagnostyka pojazdów mechanicznych, modele diagnostyczne, algorytmy diagno-zowania
1. Wprowadzenie
współczesne systemy złożonych obiektów technicznych są oparte na zasadach i modelach diagnostycznych, algorytmach diagnozowania, metodach i urządze-niach diagnostycznych, a także odpowiednich technologiach i infrastrukturze obsługiwania.
Podstawą budowy efektywnych metod i urządzeń diagnostycznych są modele diagnostyczne i algorytmy diagnozowania. istnieje wiele modeli diagnostycznych obiektów technicznych, takich jak:
— analityczne: strukturalne modalne i odwrotne;— symptomowe: regresyjne rozpoznawania obrazów, topologiczne, diagno-
styczno-niezawodnościowe, informacyjne.Jednak niewiele z tych modeli znajduje zastosowanie w procesach obsługiwania
złożonych obiektów technicznych. zatem istnieje potrzeba budowy modeli diagno-stycznych wojskowych pojazdów, które umożliwią ich wykorzystanie w praktycznej działalności utrzymywania pojazdów w stanie zdatności.

196 S. Niziński, A. Rychlik
w pracy, na podstawie publikacji [2], zaproponowano opracowanie hie-rarchicznego modelu diagnostycznego wojskowego pojazdu mechanicznego, będącego podstawą budowy algorytmów kontroli stanu i lokalizacji uszkodzeń, na podstawie których można skonstruować pokładowe i pokładowo-zewnętrzne systemy diagnostyczne.
Funkcja celu
Funkcja złożonego obiektu technicznego jest określona przez zbiór zadań, które powinien on realizować w dowolnych warunkach zewnętrznych. zatem wychodząc z przeznaczenia złożonego obiektu technicznego, można określić jego funkcję celu, na podstawie której będzie możliwe stwierdzenie, czy obiekt wykona stawiane przed nimi zadania, ze względu na swój aktualny stan techniczny.
Opierając się na pracy [2], funkcję celu złożonego obiektu technicznego, jakim jest wojskowy pojazd mechaniczny, zdefiniowano następująco (rys. 1):
F = H[U(t), X(t), , t], (1)gdzie: F — funkcja celu; Ho — wektor odwzorowania; U(t) — wektor sygnałów wejściowych; X(t) — wektor parametrów stanu; — miara eksploatacji; t — czas dynamiczny.
w badaniach diagnostycznych obiektów ściśle ustala się zbiór wejść (wymuszeń U(t) = const), aby wszelkie zmiany sygnałów diagnostycznych były powodowane głównie zmianą ich stanu technicznego (rys. 1) [3].
wektor X(t) parametrów stanu w chwili t określa wektor W(t) stanu obiektu technicznego, zatem można napisać, że:
[ ]G W( ), , ,oF t t= Θ (2)
gdzie: W(t) — wektor stanu pojazdu mechanicznego; GO — operator odwzorowania.
Biorąc pod uwagę fakt, że w badaniach i ocenie stanów pojazdów mechanicznych wektor stanu W(t) można ustalić za pomocą pomiarów zbiorów wartości składowych wektora Y(t) sygnałów diagnostycznych, wyrażenie (2) przyjmuje postać:
[ ]Y( ), , ,F t t= Φ Θ (3)
gdzie: Φθ — operator odwzorowania; Y(t) — wektor niezależnych i zupełnych wartości liczbowych parametrów
diagnostycznych (symptomów stanu).

197Model diagnostyczny złożonego obiektu technicznego
Przyjmując założenie, że każdy parametr diagnostyczny będący argumentem funkcji celu zostanie tak przekształcony, że z wyjścia danego elementu będzie miał postać napięciowego jednofazowego sygnału binarnego (1, 0), funkcję celu określa wyrażenie:
1 21, , .
N
n nnF y y y y
== ∧ = ∩ ∩
(4)
wobec tego, jeśli:
11 2
1,
, , 1 ( ) ,n
X n iy Y
n N
F y y y w t w∈
=
= ∧ = ∩ ∩ = ⇒ ∈
(5)
gdzie: y1, y2,…, yn — zbiór niezależnych i zupełnych parametrów diagnostycznych; ∧ — kwantyfikator ogólny: „dla każdego yn …”; w1 — stan zdatności.
rys. 1. Obiekt techniczny jako przedmiot diagnozowania przy założeniu, że zbiór u wymuszeń nie zmienia się: Z — zbiór zakłóceń; X — zbiór parametrów stanu; Y — zbiór parametrów diagnostycznych
co oznacza, że jeżeli wartości wszystkich parametrów diagnostycznych znajdują się w dopuszczalnych granicach, to ich funkcja celu F będąca iloczynem logicznym zbioru parametrów diagnostycznych: y1, y2,…, yn przyjmuje wartość 1. zatem pojazd mechaniczny znajduje się w stanie zdatności w1.
w przypadku gdy wartość choćby jednego parametru diagnostycznego wy-kracza poza granice dopuszczalne, to obiekt nie spełnia wymagań, czyli znajduje się w stanie niezdatności w0, co można zapisać następująco:
( ) 01 2
1,
, , 0 ,n
c n n iy Y
n N
F y y y y w t w∈
=
= ∨ = ∩ ∩ ∩ = ⇒ ∈
(6)
gdzie: ∨ — kwantyfikator szczegółowy: istnieje takie yn, że …”; w0 — stan niezdatności.
wyrażenia (4)-(6) są podstawą budowy modelu diagnostycznego i algorytmu diagnozowania wojskowych pojazdów mechanicznych jako złożonych obiektów technicznych.
198 S. Niziński, A. Rychlik
2. Analiza diagnostyczna wojskowego pojazdu mechanicznego
analizę diagnostyczną projektowanego lub już eksploatowanego wojskowego pojazdu mechanicznego wykonuje się pod kątem diagnozowania, prognozowania i generowania jego stanów. Obejmuje ona następujące elementy [3]:
— przeznaczenie, budowę i zasadę działania obiektu;— warunki funkcjonowania obiektu i jego elementów;— zakres zmian parametrów stanu i możliwości ich regulacji;— możliwość wykorzystania procesów fizyko-chemicznych (parametrów tych
procesów) jako nośniki informacji o stanie elementów obiektu;— wartości graniczne parametrów stanu i parametrów sygnałów diagnostycz-
nych;— dane dotyczące niezawodności, w tym trwałości, nieuszkadzalności, na-
prawialności i przechowywalności obiektu;— urządzenia diagnostyczne i obsługowe.w wyniku procesu analizy diagnostycznej wojskowego pojazdu mechanicznego
powinna być dokonana jego dekompozycja, której ideę można sprowadzić do na-stępujących działań. Obiekt techniczny można podzielić na P(p = 1, I) poziomów diagnostycznych.
Pierwszy poziom obiektu to sam obiekt i nazywany będzie elementem pierwszego rzędu. Jest on zbiorem elementów drugiego rzędu. drugi poziom obiektu stanowią elementy trzeciego rzędu, a każdy nich jest elementem trzeciego rzędu, itd.
Proces dekompozycji prowadzi się w stosunku do wyróżnionych podsystemów tylokrotnie, aż otrzymane podsystemy na P-tym poziomie dekompozycji uzna się za elementy niepodzielne, dla których z punktu widzenia celu badania diagnostycznego nie zakłada się dalszego podziału. najniższy poziom P dekompozycji obiektu nazywa się poziomem podstawowym (poziom elementów podstawowych). na rysunku 2 przedstawiono zdekomponowany wojskowy pojazd mechaniczny.
wierzchołek grafu przedstawia wojskowy pojazd mechaniczny jako system S, na i poziomie dekompozycji. wierzchołki drugiego poziomu grafu stanowią elementy
( 1, )ie i I= drugiego rzędu, w skład którego wchodzą elementy ( 1, )je j J= trzecie-go rzędu, zawierające elementy ( 1, )ke k K= czwartego rzędu, a te z kolei obejmują elementy ( 1, )pe p P= piątego rzędu, zwane elementami podstawowymi.
Podkreślić należy, że przyjęto jednolity pięciopoziomowy model strukturalny wojskowego pojazdu mechanicznego. Poziom piąty jest zbiorem elementów pod-stawowych i określa głębokość wnikania w strukturę obiektu, ponieważ na tym poziomie jest prowadzona lokalizacja uszkodzeń.
w przypadku potrzeby można wyróżnić różną liczbę poziomów elementów podstawowych. wtedy pojazd mechaniczny ma niejednolitą strukturę wielopo-ziomową.

199Model diagnostyczny złożonego obiektu technicznego
rys.
2. h
iera
rchi
czny
mod
el fu
nkcj
onal
ny w
ojsk
oweg
o po
jazd
u m
echa
nicz
nego
w as
pekc
ie je
go d
iagn
ozow
ania
. i, i
i, …
, V —
poz
iom
y di
agno
styc
zne,
1— p
ojaz
d ja
ko sy
stem
; 21
— k
adłu
b (n
adw
ozie
); 22
— w
ieża
; 23
— p
odw
ozie
; 24
— in
stal
acja
ele
ktry
czna
; 31
— u
kład
bez
piec
zeńs
twa;
32
— in
ne
ukła
dy; 3
3 —
uzb
roje
nie;
34
— u
kład
stab
iliza
cji;
35 —
syst
em k
iero
wan
ia o
gnie
m; 3
6 —
źró
dło
napę
du; 3
7 —
ukł
ad n
apęd
owy;
38
— u
kład
jezd
ny;
39 —
ukł
ad p
row
adze
nia;
310
— u
kład
inst
alac
ji ka
dłub
a; 3
11 —
ukł
ad in
stal
acji
wie
ży; 4
1 —
ukł
ad o
chro
ny p
rzed
bro
nią
aBc
; 42
— u
kład
prz
eciw
-po
żaro
wy;
43
— te
rmic
zna
apar
atur
a dy
mot
wór
cza;
44
— u
kład
ogr
zew
ania
wen
tyla
cji i
klim
atyz
acji;
45
— u
kład
łącz
nośc
i i n
awig
acji;
46
— u
kład
hy
drau
liczn
y; 4
7 —
ukł
ad p
neum
atyc
zny;
48
— a
rmat
a; 4
9 —
kar
abin
mas
zyno
wy;
410
— w
yrzu
tnia
prz
eciw
panc
erny
ch p
ocisk
ów k
iero
wan
ych;
411
—
prz
yrzą
dy ce
low
nicz
e; 4
12 —
ukł
ad st
abili
zacj
i pio
now
ej; 4
13 —
ukł
ad st
abili
zacj
i poz
iom
ej; 4
14 —
ukł
ad o
kreś
lani
a odl
egło
ści,
415
— b
lok
elek
tro-
niki
; 416
— si
lnik
o z
S; 4
17 —
ukł
ad n
apęd
owy
poja
zdu
koło
weg
o; 4
18 —
ukł
ad n
apęd
owy
poja
zdu
gąsie
nico
weg
o; 4
19 —
koł
owy
ukła
d je
zdny
; 420
—
gąs
ieni
cow
y uk
ład
jezd
ny; 4
21 —
ukł
ad k
iero
wni
czy;
422
— u
kład
ham
ulco
wy;
423
— źr
ódła
prą
du, 4
24 —
odb
iorn
iki k
adłu
ba; 4
25 —
odb
iorn
iki
wie
ży; 5
1 —
czuj
niki
; 52
— fi
ltr a
Bc; 5
3 —
czuj
niki
; 54
— p
irona
boje
; 55
— u
rząd
zeni
e odp
alan
ia p
ocisk
ów d
ymot
wór
czyc
h; 5
6 —
ukł
ad o
grze
wan
ia;
57 —
ukł
ad k
limat
yzac
ji; 5
8 —
tele
fon
wew
nętr
zny;
59
— u
kład
naw
igac
ji; 6
0 —
zaw
ór st
eruj
ący;
610
— si
łow
nik;
611
— z
awór
regu
lacj
i ciśn
ieni
a;
612
— si
łow
nik;
613
— a
utom
at ła
dow
ania
; 614
— u
kład
spus
tow
y; 6
15 —
ukł
ad n
apro
wad
zani
a; 6
16 —
cel
owni
k dz
ienn
y, 61
7 —
cel
owni
k no
cny;
61
8 —
ukł
ad li
nii c
elow
ania
; 619
— u
kład
osi
lufy
; 620
— c
zujn
iki;
621
— w
yzna
czni
k ką
ta; 6
22 —
dal
mie
rz la
sero
wy;
623
— k
ompu
ter b
alist
yczn
y;
624
— fi
ltr p
owie
rza;
625
— w
trys
kiw
acze
; 626
— tu
rbos
pręż
arka
; 627
— u
kład
rozr
ządu
; 628
— sp
rzęg
ło; 6
29 —
ukł
ad st
erow
ania
skrz
ynią
bie
gów
; 630
—
sprz
ęgło
; 631
— u
kład
ster
owan
ia m
echa
nizm
ami s
kręt
u; 6
32 —
koł
a; 6
33 —
c.p.
k; 6
34 —
gąs
ieni
ce; 6
35 —
koł
a nap
ędow
e; 63
6 —
ukł
ad zw
rotn
iczy
; 63
7 —
ukł
ad w
spom
agan
ia; 6
38 —
ham
ulce
kół
; 639
— u
kład
ster
owan
ia; 6
40 —
akum
ulat
or; 6
41 —
prą
dnic
a; 6
42 —
obw
ód ro
zruc
how
y; 6
43 —
inne
ob
wod
y; 6
44 —
obw
ód o
brot
u w
ieży
; 645
— in
ne o
bwod
y

200 S. Niziński, A. Rychlik
zbiór elementów podstawowych tworzymy w następujący sposób: dia-gnozowanie wszystkich elementów pojazdu jest możliwe, lecz nieuzasadnione. w związku z tym istnieje potrzeba wybrania tych elementów podstawowych pojazdu, które powinny być diagnozowane, zatem zachodzi potrzeba ustalenia ich istotności [3].
istotność Is elementów podstawowych można wyznaczyć za pomocą zbioru kryteriów {kz}:
{ }1 2, , , ; 1, .s zI k k k z Z= = (7)
Jako kryteria wyboru elementów podstawowych można wykorzystać:— bezpieczeństwo;— słabe ogniwa obiektu;— koszty;— kryteria ekonomiczne.
3. Hierarchiczny model diagnostyczny wojskowego pojazdu mechanicznego
Model obejmuje następujące elementy (rys. 2):— funkcję celu elementów podstawowych — poziom V;— funkcję celu poziomów: iV, iii i ii;— funkcję celu wojskowego pojazdu mechanicznego na i poziomie dekom-
pozycji;— modele diagnostyczne elementów poziomu iV, obejmujące elementy
podstawowe poziomu V.każdy z elementów podstawowych V poziomu dekompozycji może realizować
„m” funkcji celu. każdą funkcję celu można opisać za pomocą zbioru y1, y2,…, yn parametrów diagnostycznych.
Przykładowo wypadkowa funkcja celu F51 elementu e51 ma postać:
51 51 1 21 1, , ,
M M
m nm mF F y y y
= == ∧ = ∧ ∩ ∩ ∧ (8)
gdzie: F51 — funkcja celu elementu podstawowego e51; y1 ∩ y2 ∩ ... ∩ yn — iloczyn logistyczny wartości zbioru parametrów
diagnostycznych opisujących funkcji celu F51.
Jeżeli zachodzi zależność:
1 2
1,
, , 1,n
ny Y
n N
y y y∈
=
∨ ∩ ∩ ∩ =
(9)

201Model diagnostyczny złożonego obiektu technicznego
to element e51 znajduje się w stanie zdatności. natomiast gdy:
1 2
1,
, , 0,n
ny Y
n N
y y y∈
=
∨ ∩ ∩ ∩ =
(10)
to element e51 znajduje się w stanie niezdatności.zatem funkcja celu F51 jest wyrażona przez jeden binarny jednobitowy sy-
gnał wypadkowy przenoszący informację diagnostyczną o stanie elementów e51. w podobny sposób tworzymy funkcje celu pozostałych elementów podstawowych poziomu V.
następnie wyznaczamy funkcję celu F4 elementów poziomu iV, tzn.: 41, 42, itd., biorąc pod uwagę to, że element e41 obejmuje elementy podstawowe e51 i e52 poziomu V.
Przykładowa wypadkowa funkcja celu elementu e41 ma postać:
41 51 52.F F F= ∩ (11)
wypadkowa funkcja celu F41 elementu e41 jest wyrażona przez jeden binarny, jednobitowy sygnał wypadkowy, przenoszący informację diagnostyczną o stanie elementów e51 i e52. utworzony jest on z iloczynu logicznego wszystkich binarnych jednobitowych parametrów diagnostycznych, charakteryzujących funkcję celu F41, dla której słuszne są zależności (9) i (10).
Podobnie tworzymy funkcje celu pozostałych elementów poziomu iV.Mając funkcję celu elementów poziomu iV, możemy utworzyć wypadkowe
funkcje celu elementów poziomu iii. Przykładowo dla elementu e31 wypadkowa funkcja celu ma postać:
31 41 42 43 44 45.F F F F F F= ∩ ∩ ∩ ∩ (12)
Funkcję celu elementów poziomu drugiego tworzymy podobnie. i tak dla elementu e21 mamy:
21 31 32.F F F= ∩ (13)
wypadkowa funkcji celu F1 pojazdu określa wyrażenie:
1 21 22 23 24.F F F F F= ∩ ∩ ∩ (14)
wobec tego, jeżeli zachodzi zależność:
1 21 22 23 24 1,F F F F F= ∩ ∩ ∩ = (15)
to wojskowy pojazd mechaniczny znajduje się w stanie zdatności.natomiast, jeżeli mamy:
1 21 22 23 24 0,F F F F F= ∩ ∩ ∩ = (16)
to wojskowy pojazd mechaniczny znajduje się w stanie niezdatności.

202 S. Niziński, A. Rychlik
wypadkowa funkcji celu F1 jest opisana poprzez binarny jednobitowy sygnał wypadkowy zawierający informację o stanie wszystkich wyróżnionych elementów podstawowych poziomu V.
Przedstawiony element hierarchicznego modelu diagnostycznego można wyko-rzystać do kontroli stanu pojazdu i lokalizacji uszkodzeń na poziomach ii, iii i iV.
Jeżeli zajdzie zdarzenie opisane wyrażeniem (10), należy przejść do lokalizacji uszkodzeń elementów podstawowych zgrupowanych na poziomie V. Jednak do tego celu niezbędne są modele diagnostyczne i algorytmy diagnozowania elementów znajdujących się na poziomie iV.
w tej pracy zdecydowano o wybraniu modelu informacyjnych elementów (obiektów) iV poziomu wojskowego pojazdu mechanicznego opracowanego na podstawie systemu lokalizacji uszkodzeń FiS (Fault Isolation System) [1].
Stan obiektu (elementu iV rzędu) określa wektor [4, 5]:
( )( )
( )
1
2 ,
m
x tx t
W
x t
=
(17)
gdzie: x1(t), x2(t), …, xm(t) — zbiór parametrów stanu
dla obiektu można określić zbiór możliwych uszkodzeń i zapisać w postaci wektora:
( )( )
( )
1
2 ,
k
f tf t
F
f t
=
(18)
gdzie: f1(t), f2(t), …, fk(t) — zbiór uszkodzeń obiektu technicznego.
Przyjmując, że zbiór uszkodzeń jest tożsamy ze zborem stanów niezdatności obiektu, tzn.:
( ){ } ( ){ }0 ,Om kW w t F f t= ≡ = (19)
obiektowi można przyporządkować zbiór parametrów sygnału diagnostycznego równoznaczny ze zbiorem symptomów stanu. Symptom stanu jest to miara sygnału, która zmienia się istotnie wraz ze zmianą stanu obiektu. Symptomy stanu można traktować jako wektor:
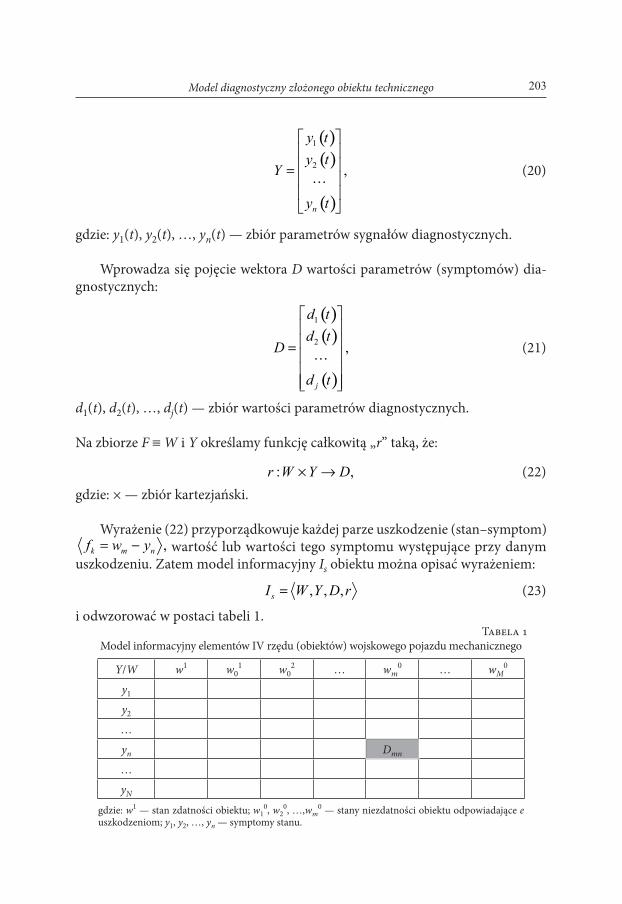
203Model diagnostyczny złożonego obiektu technicznego
( )( )
( )
1
2 ,
n
y ty t
Y
y t
=
(20)
gdzie: y1(t), y2(t), …, yn(t) — zbiór parametrów sygnałów diagnostycznych.
wprowadza się pojęcie wektora D wartości parametrów (symptomów) dia-gnostycznych:
( )( )
( )
1
2 ,
j
d td t
D
d t
=
(21)
d1(t), d2(t), …, dj(t) — zbiór wartości parametrów diagnostycznych.
na zbiorze F ≡ W i Y określamy funkcję całkowitą „r” taką, że:
: ,r W Y D× → (22)gdzie: × — zbiór kartezjański.
wyrażenie (22) przyporządkowuje każdej parze uszkodzenie (stan–symptom) ,k m nf w y= − wartość lub wartości tego symptomu występujące przy danym
uszkodzeniu. zatem model informacyjny Is obiektu można opisać wyrażeniem:
, , ,sI W Y D r= (23)
i odwzorować w postaci tabeli 1.tabela 1
Model informacyjny elementów iV rzędu (obiektów) wojskowego pojazdu mechanicznego
Y/W w1 w01 w0
2 … wm0 … wM
0
y1
y2
…
yn Dmn
…
yN
gdzie: w1 — stan zdatności obiektu; w10, w2
0, …,wm0 — stany niezdatności obiektu odpowiadające e
uszkodzeniom; y1, y2, …, yn — symptomy stanu.

204 S. Niziński, A. Rychlik
Is jest uogólnieniem binarnej macierzy diagnostycznej, dla której zbiór war-tości wszystkich symptomów stanu jest jednakowy i wynosi Dy = {1, 0}. cechy
rys. 3. ilustracja graficzna procesu badań i oceny stanu wojskowego pojazdu mechanicznego
charakterystyczne Is są następujące:— dla każdego symptomu może istnieć indywidualny zbiór jego wartości;— zbiór Dj wartości j-tego symptomu może być wielowartościowy;— dowolny element Is może zawierać zarówno jedną wartość symptomu, jak
też ich podzbiory.kolumny Is odpowiadają:— pierwsza stanowi zdatności obiektu w1, co oznacza, że wartości wszystkich
symptomów znajdują się w granicach dopuszczalnych, czyli obiekt spełnia określone wymagania, zatem znajduje się w stanie zdatności;
— kolumny następnie odpowiadają uszkodzeniom (stanom) (f1, w10, f2,
w20, …), co oznacza, że jeśli wartość choćby jednego symptomu wykracza
poza dopuszczalne granice, to obiekt nie spełnia wymagań, czyli znajduje się w stanie niezdatności w0,
— m-ta kolumna odpowiadająca uszkodzeniu obiektu nazywa się sygnaturą uszkodzenia i tworzy wektor wartości symptomów odpowiadających temu uszkodzeniu.
zakładamy, że dla każdego symptomu stanu istnieje tylko jedna wartość odpo-wiadająca stanowi zdatności (pozytywny wynik sprawdzenia) — oznaczona jako 1, natomiast dla uszkodzeń (stanów) tych wartości może być więcej niż jedna.
dla najprostszych przypadków może być stosowana klasyfikacja dwustanowa, jednakowa dla wszystkich symptomów. Jeżeli:
Dy ≡ Dm ≡ {1, 0}, (24)
wtedy Is odpowiada binarnej macierzy diagnostycznej.Przyjąć można trójwarstwową ocenę symptomu (wyniku sprawdzenia):
Dm = {1, 0, -1}, (25)
gdzie: 1 — pozytywny wynik sprawdzenia, tzn. yn min< y < yn max; 0 — negatywny wynik sprawdzenia, tzn. yn < y n min; 1 — negatywny wynik sprawdzenia, tzn. yn > y nmax, yn max, yn min
— wartości graniczne symptomów odpowiadające stanowi zdatności.

205Model diagnostyczny złożonego obiektu technicznego
trójwarstwowa klasyfikacja wyników stwarza szansę uzyskania rozróżnialności warunkowej uszkodzeń, czego nie zapewnia klasyfikacja dwuwartościowa. Można także wprowadzić wielowartościową klasyfikację wyników sprawdzeń.
ustalenie stanu obiektu może mieć miejsce w wyniku przeprowadzenia ba-dań diagnostycznych. należy racjonalnie zorganizować taki proces, sterować jego przebiegiem tak, aby uzyskać optymalne wyniki w sensie przyjętego kryterium. Proces badań diagnostycznych obiektu polega na wykonaniu określonego zbioru sprawdzeń i analizie uzyskanych wyników. zrealizowanie procesu badań daje wynik, czyli diagnozę (rys. 3).
Sprawdzenie jest to pomiar i ustalenie wartości parametru diagnostycznego. do badań potrzebny jest zbiór sprawdzeń:
{ }; 1, .jY y j J= = (26)
rys. 4. ilustracja graficzna procesu badań i oceny stanu wojskowego pojazdu mechanicznego

206 S. Niziński, A. Rychlik
uporządkowany minimalny zbiór sprawdzeń diagnostycznych Ŷ nazywa się algorytmem diagnozowania obiektu:
11 22ˆ , , , ,nkY y y y= (27)
gdzie: y11, y22, …, ynk — sprawdzenie wykorzystywane jako k-te w kolejności.
w badaniach i ocenie elementów wojskowego pojazdu mechanicznego wyróż-niono następujące fazy: kontrola stanu (zdatności) i lokalizacja uszkodzeń (rys. 4).
Uproszczony algorytm budowy hierarchicznego modelu diagnostycznego i algorytmu diagnozowania wojskowego pojazdu mechanicznego
algorytm obejmuje następujące zasadnicze kroki:1. na podstawie uzyskanej wiedzy z procesu identyfikacji dokonać dekom-
pozycji wojskowego pojazdu mechanicznego;
rys. 5. ilustracja graficzna hierarchicznego modelu diagnostycznego pojazdu mechanicznego

207Model diagnostyczny złożonego obiektu technicznego
2. ustalić 1, 2, …, P poziomów dekompozycji pojazdu;3. na poszczególnych poziomach dekompozycji wydzielić grupy elementów
realizujących określone funkcje, na przykład: 41, 31, 21, … (rys. 2);4. ustalić zbiory elementów podstawowych (poziom V) na podstawie wy-
branych kryteriów, na przykład słabych ogniw (rys. 5);5. dla elementów poziomu iV zbudować modele diagnostyczne typu infor-
macyjnego lub binarnej macierzy diagnostycznej, tzn. ustalić:— zbiór stanów;— zbiór parametrów diagnostycznych;— wstępnie określić związki pomiędzy stanami i parametrami diagno-
stycznymi typu (–1, 0, +1) lub (0, 1);6. określić zbiór wielkości fizycznych dostępnych pomiarowo, w tym wielo-
wymiarowych, i na ich podstawie wyznaczyć eksperymentalnie ich miary (parametry diagnostyczne, symptomy stanu), w efekcie zbiory dostępnych sprawdzeń;
7. praktycznie zweryfikować wybrany model diagnostyczny, tzn. odwzorowanie: stany — parametry diagnostyczne;
8. dokonać optymalizacji wybranych modeli diagnostycznych w aspekcie:— ostatecznej liczby stanów;— zminimalizowanego, uporządkowanego zbioru sprawdzeń (parametrów
diagnostycznych);— rozróżnialności stanów;
9. w każdym optymalnym modelu diagnostycznym poziomu iV wydzie-lić wszystkie zbiory niezdatności elementów podstawowych, uzyskując w efekcie słownik niezdatności (sygnatury uszkodzeń — kolumny) każdego elementu podstawowego;
10. dla każdego elementu poziomu iV utworzyć gniazda diagnostyczne obej-mujące (rys. 5):— mierzone wielkości fizyczne;— zminimalizowane, uporządkowane zbiory parametrów diagnostycz-
nych;11. dla każdego elementu poziomu iV na podstawie ich funkcji wyznaczyć
sygnały reprezentatywne typu — (0, 1);12. na podstawie funkcji celu utworzyć sygnały reprezentatywne elementów
poziomu ii, ii i i;13. dla każdego elementu poziomu iii, ii i i utworzyć węzły diagnostyczne,
do których należy dołączyć ich sygnały reprezentatywne poziomów iV, iii i ii;
14. iloczyn funkcji celu F24, F21, F22, i F23 tworzy sygnał reprezentatywny dla całego pojazdu mechanicznego (poziom i) przyjmując wartości: 1 — pojazd zdatny, 0 — pojazd niezdatny.

208 S. Niziński, A. Rychlik
Uproszczony algorytm diagnozowania wojskowego pojazdu mechanicznego na podstawie opracowanego wielopoziomowego modelu diagnostycznego
algorytm obejmuje następujące kroki:11. diagnozowanie ciągłe lub okresowe (rys. 5);12. pomiar wybranych wartości wielkości fizycznych;13. wyznaczenie zbioru wartości parametrów diagnostycznych;14. porównanie wartości parametrów diagnostycznych z wartościami dopusz-
czalnymi (poziom iV);15. wyznaczenie sygnałów typu (–1, 0, 1) lub (0, 1);16. wyznaczenie stanów zdatności w1 lub stanów niezdatności w0 (słownika
niezdatności, sygnatur uszkodzeń) elementów V rzędu;17. wyznaczenie sygnałów wzorcowych elementów poziomu iV;18. wyznaczenie sygnałów wzorcowych poziomu iii i ii;19. wyznaczenie sygnału wzorcowego pojazdu mechanicznego (poziom i);10. podjęcie decyzji:
— jeśli sygnał wzorcowy ma wartość „1”, oznacza to, że pojazd mecha-niczny znajduje się w stanie zdatności;
— jeżeli sygnał wzorcowy ma wartość: „0”, oznacza to, że pojazd znajduje się w stanie niezdatności, zatem konieczne jest zrealizowanie drugiej fazy badania stanu, tj. lokalizacji uszkodzeń;
11. lokalizacja uszkodzenia odbywa się za poziomach grup elementów ii, iii i iV;
12. zlokalizowanie uszkodzonych elementów podstawowych na poziomie V.
4. Podsumowanie
reasumując rozpatrzone zagadnienia dotyczące hierarchicznego wielopozio-mowego modelu diagnostycznego złożonego obiektu technicznego na przykładzie wojskowego pojazdu mechanicznego, należy stwierdzić, co następuje:
1. funkcje celu wyrażone za pomocą określonego zbioru parametrów diagnostycz-nych zawierają informację o stanie elementów pojazdu mechanicznego;
2. wynikiem analizy diagnostycznej pojazdu mechanicznego powinna być jego dekompozycja, wykonana w taki sposób, aby uzyskać zbiory istotnych elementów podstawowych ze względu na wybrane kryteria, na przykład bezpieczeństwa;
3. hierarchiczny model diagnostyczny pojazdu mechanicznego pozwala na zbudowanie algorytmów, których wykonanie umożliwia kontrolę stanu i lokalizację uszkodzeń elementów na poziomach pośrednich i elementów podstawowych;
209Model diagnostyczny złożonego obiektu technicznego
4. opracowanie zasady diagnozowania, hierarchiczny model diagnostyczny i algorytm diagnozowania mogą być podstawą budowy pokładowego lub pokładowo-zewnętrznego systemu diagnostycznego pojazdu mechanicz-nego.
Artykuł wpłynął do redakcji 14.12.2009 r. Zweryfikowaną wersję po recenzji otrzymano w grudniu 2009 r.
litEratura
[1] J. M. kościelny, Diagnostyka zautomatyzowanych procesów przemysłowych, akademicka Oficyna wydawnicza EXit, warszawa, 2001.
[2] J. r. Młokosiewicz, Metoda wielopoziomowego badania stanu obiektów technicznych i synteza systemu diagnostycznego, wojskowa akademia techniczna, 1734/87, warszawa, 1987.
[3] S. niziński, r. Michalski, Diagnostyka obiektów technicznych, instytut technologii Eksploatacji, radom, 2002.
[4] Sprawozdanie merytoryczne nr 48/SS/2008 z realizacji projektu badawczego t00B00531/51 nt.: Metoda diagnozowania silnika spalinowego o zapłonie samoczynnym na podstawie pomiaru momentu obrotowego w warunkach trakcyjnych, witPiS, Sulejówek, 2008.
[5] w. kupicz, Metoda diagnozowania silnika spalinowego za pomocą momentu obrotowego w wyznaczonych warunkach trakcyjnych, rozprawa doktorska, uniwersytet warmińsko-Mazurski, wydział nauk technicznych, Olsztyn, 2009.
S. nizińSki, a. rychlik
Diagnostic model of a complex technical objectAbstract. Modern systems of complex technical objects are based upon the rules and diagnostic models, diagnosing algorithms, methods and diagnostic equipment, and also proper technologies and operation infrastructure. diagnostic models and diagnosing algorithms are the base of building the effective methods and diagnostic equipment. There are many diagnostic models of technical objects, such as: analytical (structural, modal and reversed), symptom (image regressive recognition, topological, diagnostic and reliable, informative). however, only a few of those models are useful in maintenance processes of complex technical objects. Therefore, there is the need to build diagnostic models of military vehicles, which will enable their application in the practical maintenance of vehicles in the operational state. There has been in existence a problem of diagnosing, prognosis and generation of the state of the complex technical objects. in the paper, a military mechanical vehicle, as: tank, infantry fighting vehicle, armoured personnel carrier, tracked armour personnel carrier was assumed as the complex technical object. There was presented a conception of a diagnostic model of such technical objects. Keywords: diagnostics of mechanical vehicles, diagnostic models, diagnosing algorithms

Related Documents











