MIT and James Orlin © 2003 1 Nonlinear Programming Theory

MIT and James Orlin © 2003 1 Nonlinear Programming Theory.
Dec 19, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
MIT and James Orlin © 2003
1
Nonlinear Programming Theory
MIT and James Orlin © 2003
2
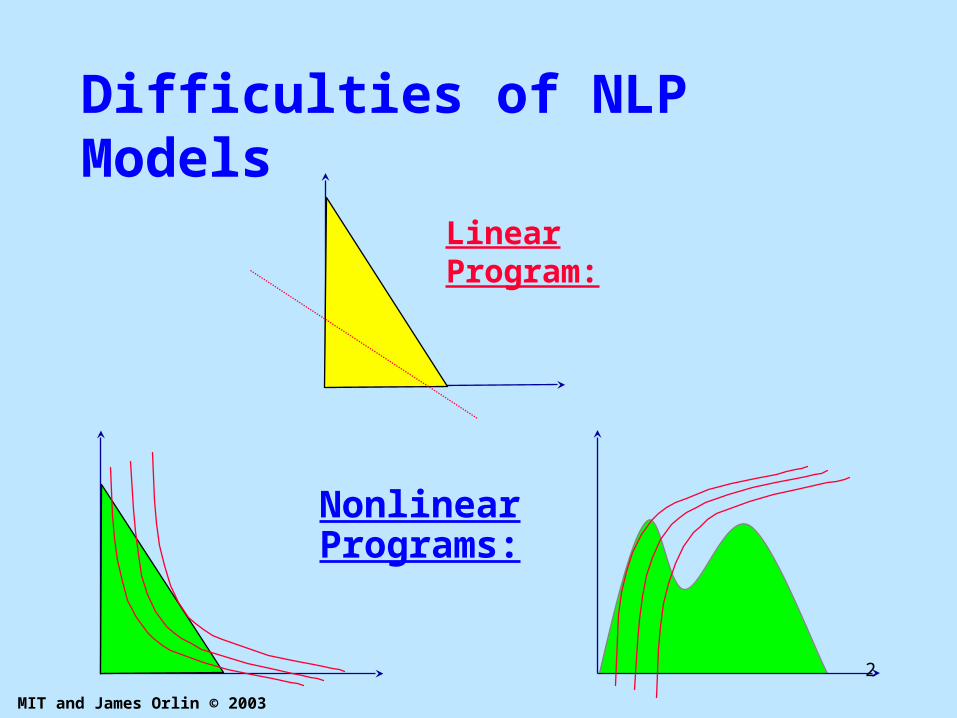
Difficulties of NLP Models
Nonlinear Programs:
Linear Program:
MIT and James Orlin © 2003
3
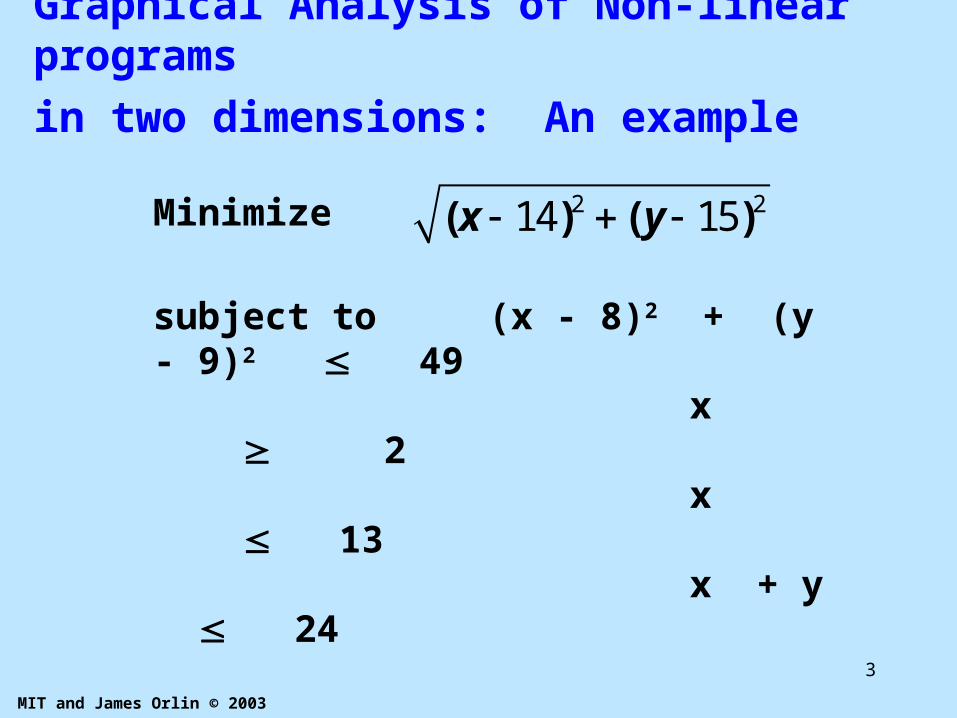
Graphical Analysis of Non-linear programs
in two dimensions: An example
2 214 15( ) ( )x y Minimize
subject to (x - 8)2 + (y - 9)2 49 x 2 x 13 x + y 24

MIT and James Orlin © 2003
4
Where is the optimal solution?
0 2 4 6 8 10 12 14 16 18
0
2
4
6
8
10
12
14
16
18y
x
Note: the optimal solution is not at a corner point. It is where the isocontour first hits the feasible region.
MIT and James Orlin © 2003
5
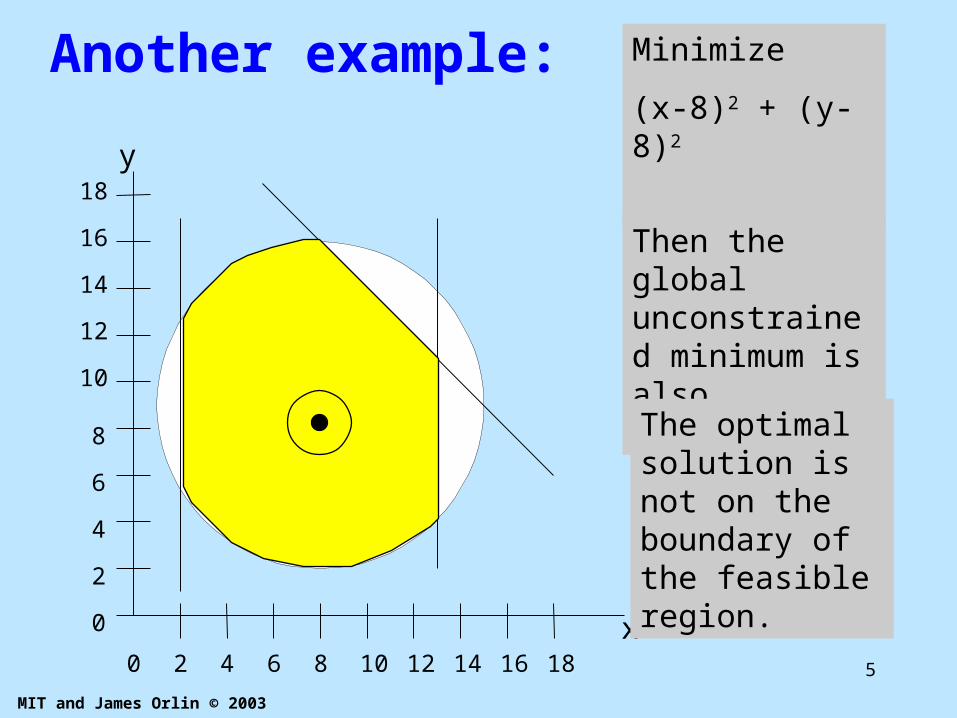
Another example:
0 2 4 6 8 10 12 14 16 18
0
2
4
6
8
10
12
14
16
18y
x
Minimize
(x-8)2 + (y-8)2
Then the global unconstrained minimum is also feasible.
The optimal solution is not on the boundary of the feasible region.
MIT and James Orlin © 2003
6
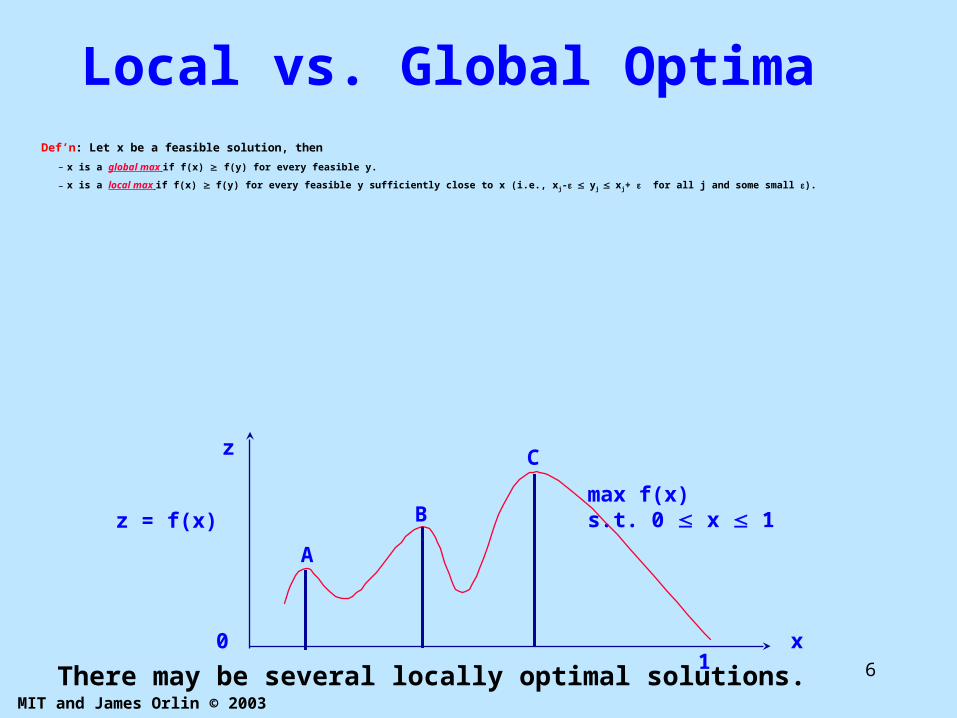
Local vs. Global Optima
There may be several locally optimal solutions.x
z
10
z = f(x)max f(x)s.t. 0 x 1
A
B
C
Def’n: Let x be a feasible solution, then
– x is a global max if f(x) f(y) for every feasible y.
– x is a local max if f(x) f(y) for every feasible y sufficiently close to x (i.e., xj-yj xj+ for all j and some small ).
MIT and James Orlin © 2003
7
When is a locally optimal solution also globally optimal?
For minimization problems
– The objective function is convex.
– The feasible region is convex.

W
P
2 4 6 8 10 12 14
24
68
1012
14
Convexity and Extreme PointsWe say that a set S is convex, if for every two points x and y in S, and for every real number in [0,1], x + (1-)y S.
The feasible region of a linear program is convex.
x
y
We say that an element w S is an extreme point (vertex, corner point), if w is not the midpoint of any line segment contained in S.
8
MIT and James Orlin © 2003
9
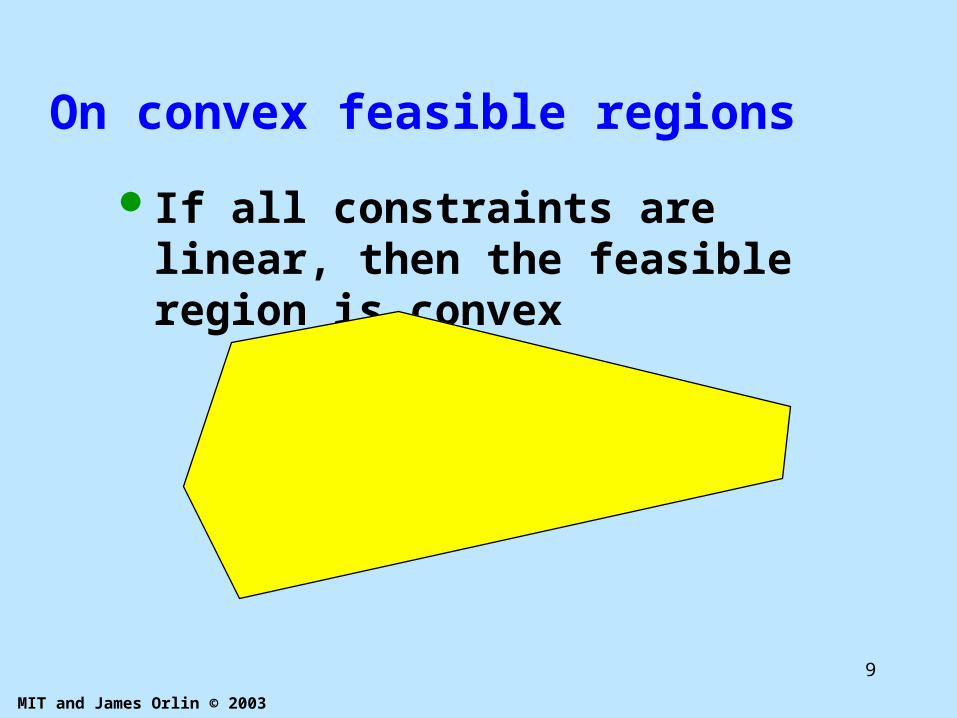
On convex feasible regions
If all constraints are linear, then the feasible region is convex
MIT and James Orlin © 2003
10
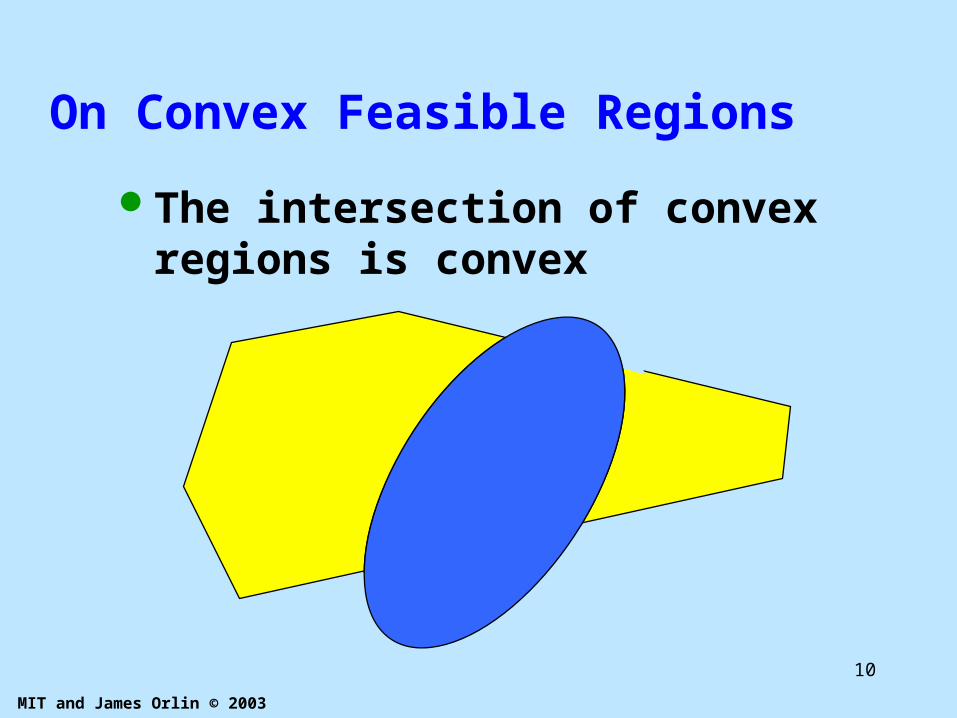
On Convex Feasible Regions
The intersection of convex regions is convex
MIT and James Orlin © 2003
11
S
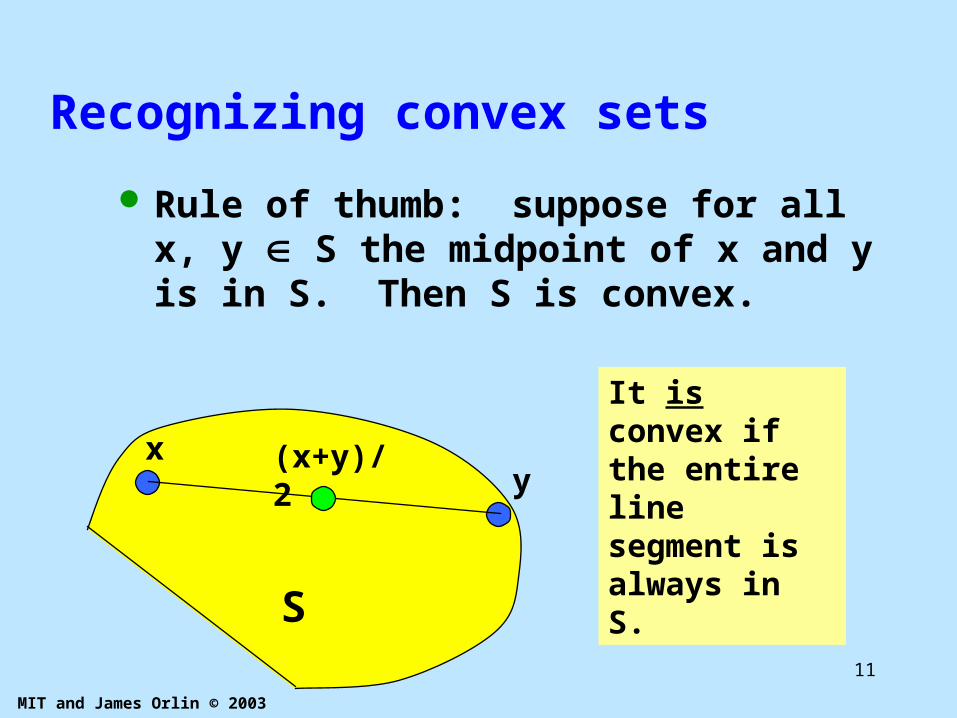
Recognizing convex sets
Rule of thumb: suppose for all x, y S the midpoint of x and y is in S. Then S is convex.
xy
It is convex if the entire line segment is always in S.
(x+y)/2
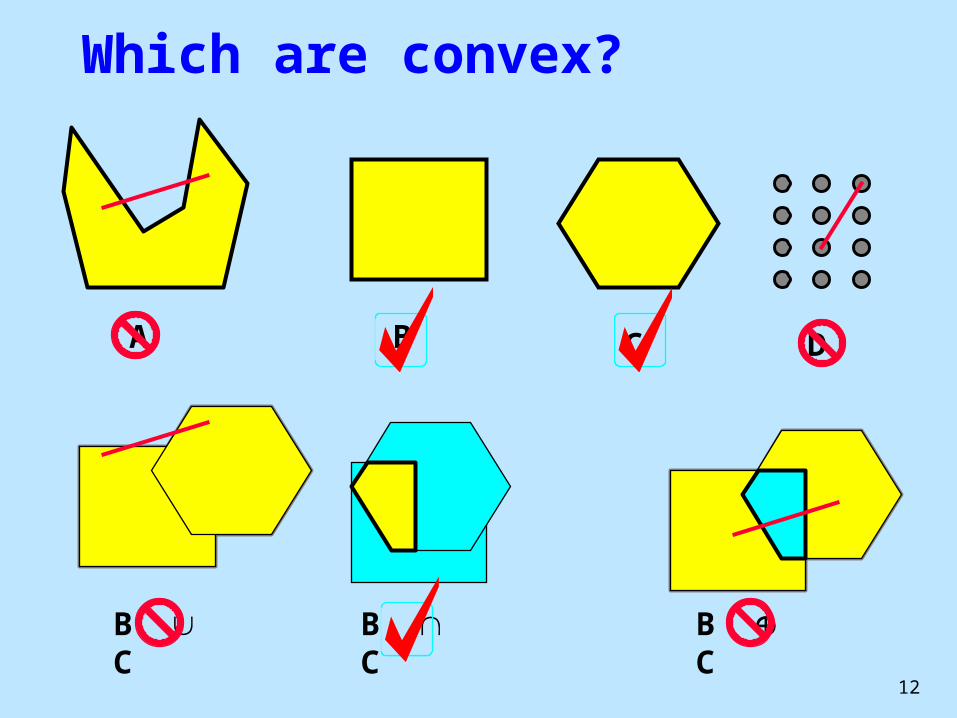
Which are convex?
CB
B C B C B C
DA
12
MIT and James Orlin © 2003
13
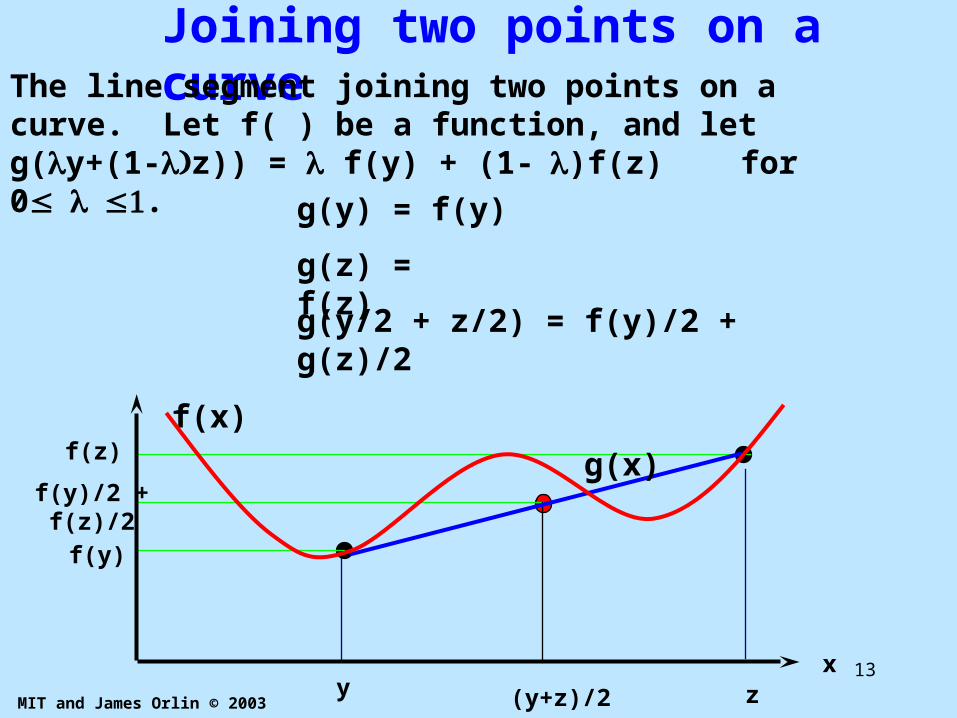
Joining two points on a curveThe line segment joining two points on a curve. Let f( ) be a function, and let g(y+(1-z)) = f(y) + (1-)f(z) for 0.
f(y)
f(z)
(y+z)/2
f(y)/2 +f(z)/2
g(x)
g(y) = f(y)
g(z) = f(z)
g(y/2 + z/2) = f(y)/2 + g(z)/2
y z
f(x)
x
MIT and James Orlin © 2003
14
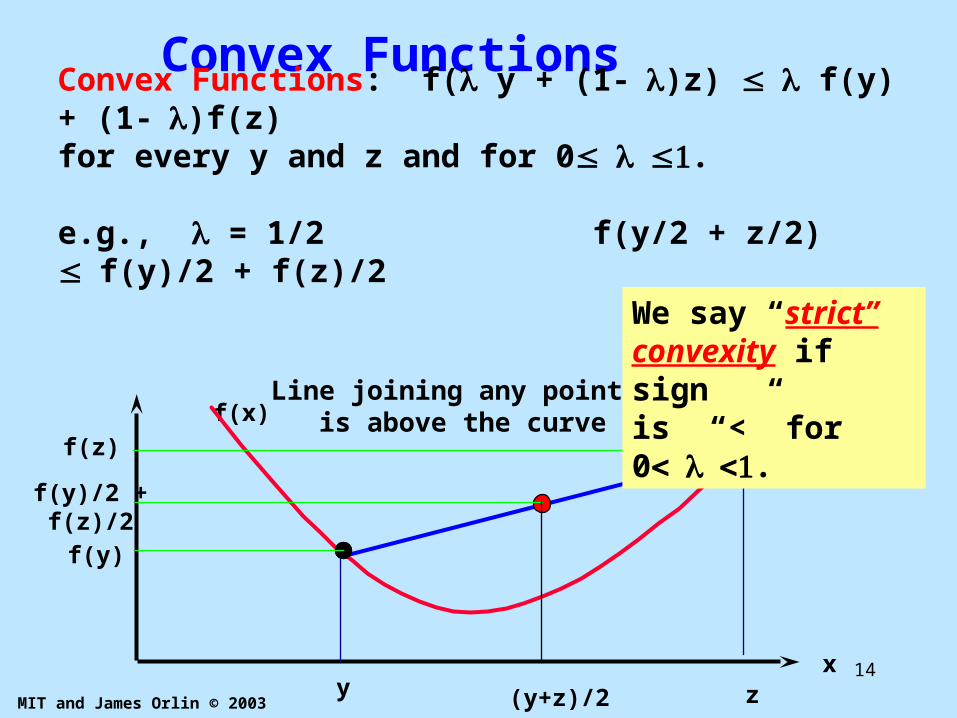
Convex FunctionsConvex Functions: f( y + (1-)z) f(y) + (1-)f(z) for every y and z and for 0.
e.g., = 1/2 f(y/2 + z/2) f(y)/2 + f(z)/2
Line joining any points is above the curvef(x)
xy z
f(y)
f(z)
(y+z)/2
f(y)/2 +f(z)/2
We say “strict” convexity if sign is “<” for 0.
MIT and James Orlin © 2003
15
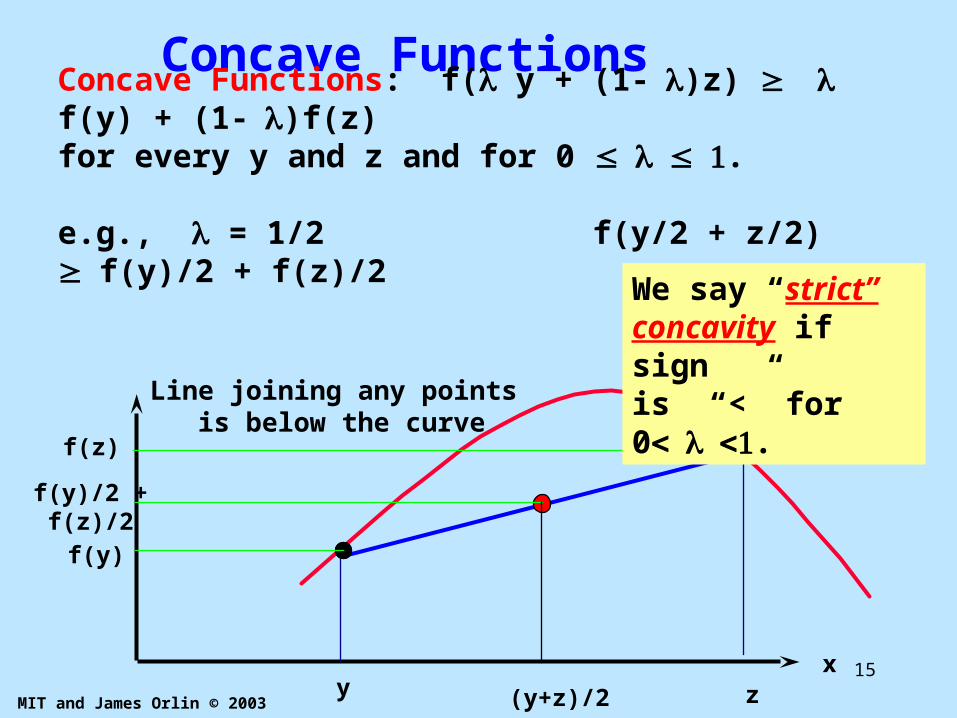
Concave FunctionsConcave Functions: f( y + (1-)z) f(y) + (1-)f(z) for every y and z and for 0 .
e.g., = 1/2 f(y/2 + z/2) f(y)/2 + f(z)/2
Line joining any points is below the curve
xy z
f(y)
f(z)
(y+z)/2
f(y)/2 +f(z)/2
We say “strict” concavity if sign is “<” for 0.
MIT and James Orlin © 2003
16
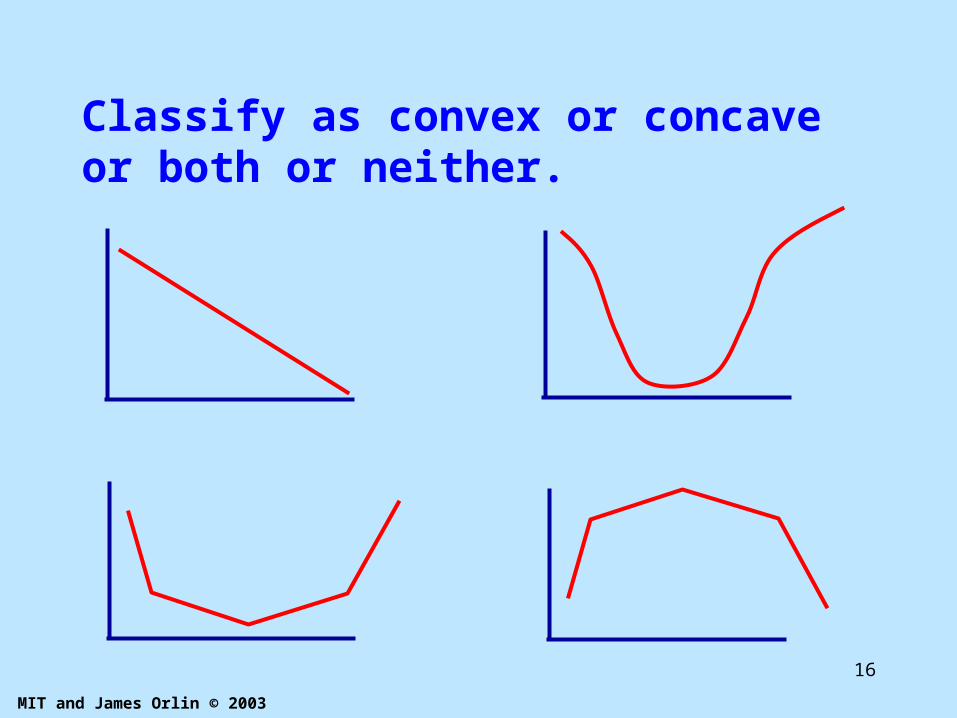
Classify as convex or concave or both or neither.
MIT and James Orlin © 2003
17
More on convex functions
x
f(x)
-x
f(-x)
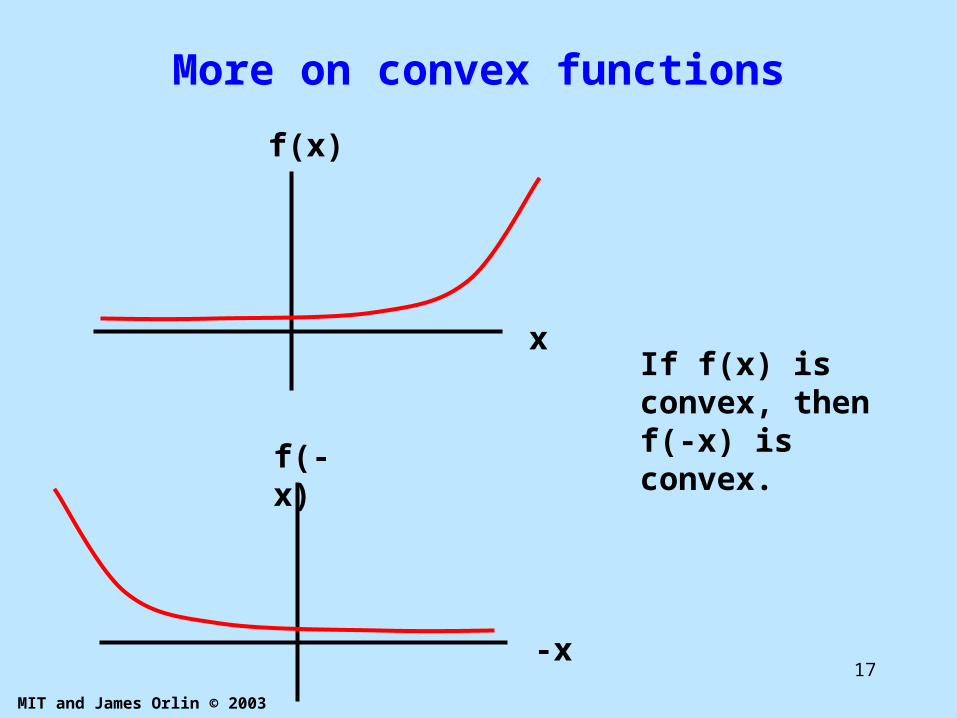
If f(x) is convex, then f(-x) is convex.

MIT and James Orlin © 2003
18
More on convex functions
x
y
If f(x) is convex, then K - f(x) is concave.
x
y
MIT and James Orlin © 2003
19
More on convex functions
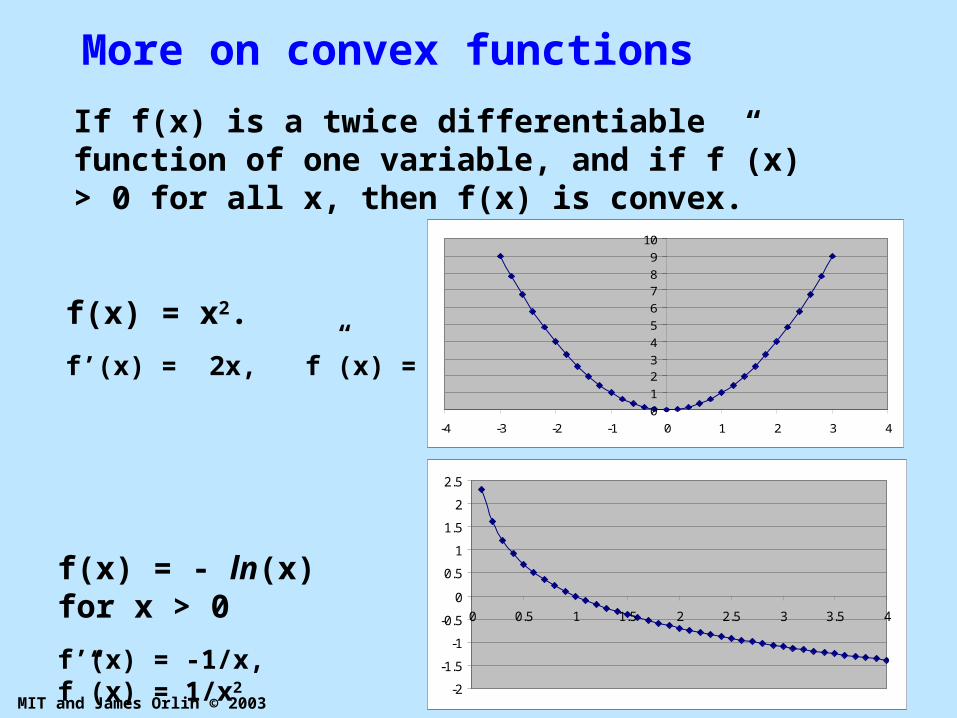
If f(x) is a twice differentiable function of one variable, and if f”(x) > 0 for all x, then f(x) is convex.
f(x) = x2.
f’(x) = 2x, f”(x) = 2
0
1
23
4
5
6
78
9
10
-4 -3 -2 -1 0 1 2 3 4
f(x) = - ln(x) for x > 0
f’(x) = -1/x, f”(x) = 1/x2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0 0.5 1 1.5 2 2.5 3 3.5 4
MIT and James Orlin © 2003
20
0
1
2
3
4
5
6
7
8
-3 -2 -1 0 1 2 3f(x) g(x)
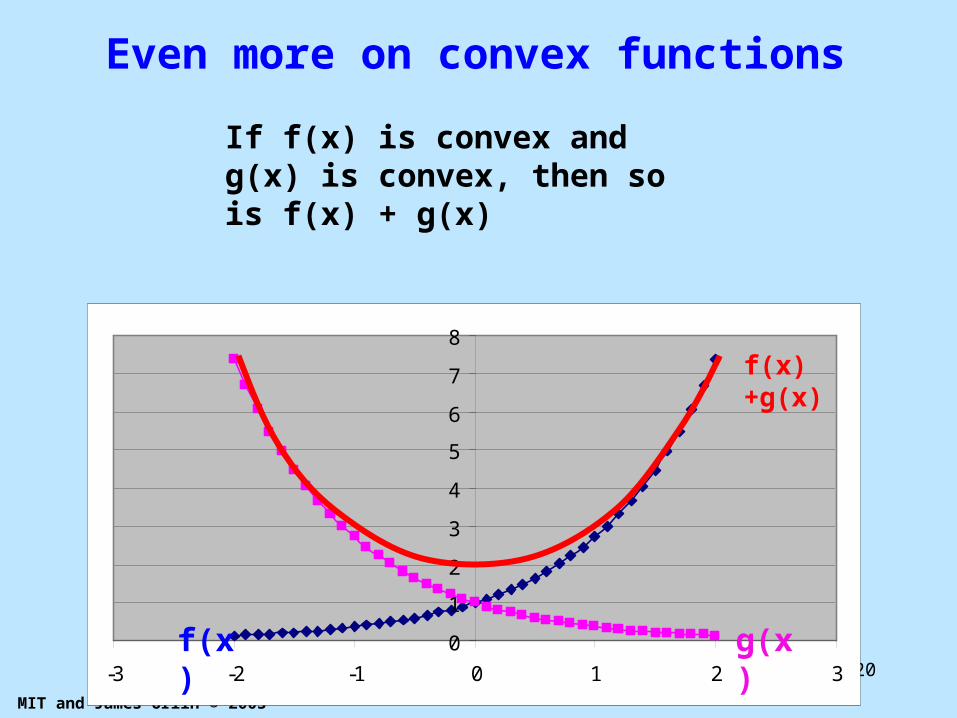
Even more on convex functions
If f(x) is convex and g(x) is convex, then so is f(x) + g(x)
f(x)+g(x)
MIT and James Orlin © 2003
21
0
1
2
3
4
5
6
7
8
-3 -2 -1 0 1 2 3f(x) g(x)
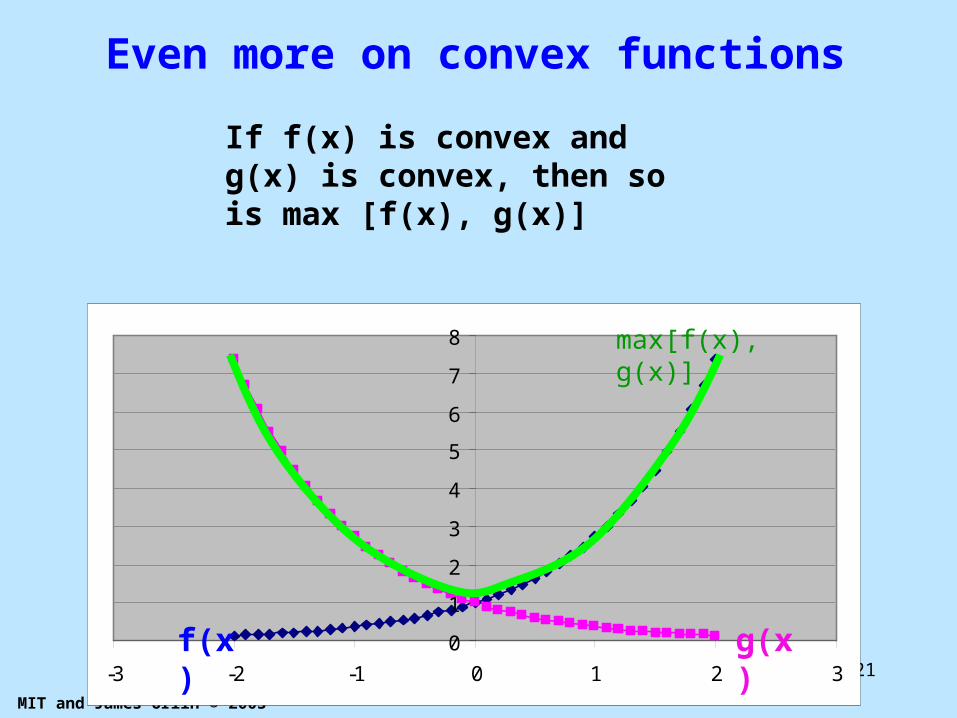
Even more on convex functions
If f(x) is convex and g(x) is convex, then so is max [f(x), g(x)]
max[f(x), g(x)]
MIT and James Orlin © 2003
22
What functions are convex?
f(x) = 4x + 7 all linear functions
f(x) = 4x2 – 13 some quadratic functions
f(x) = ex
f(x) = 1/x for x > 0
f(x) = |x|
f(x) = - ln(x) for x > 0
MIT and James Orlin © 2003
23
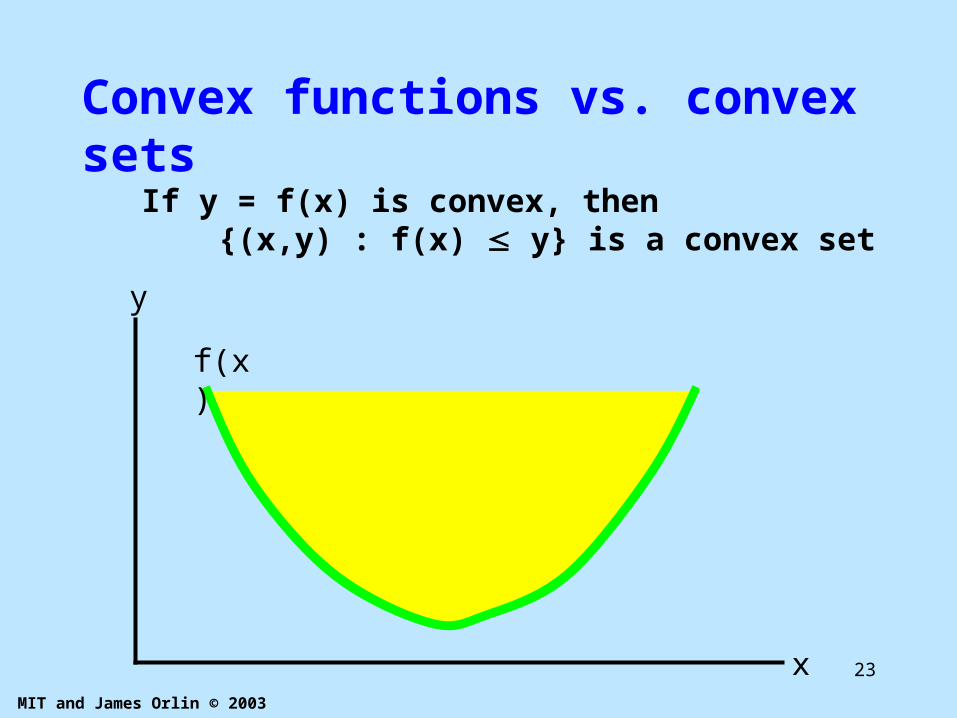
Convex functions vs. convex sets
If y = f(x) is convex, then {(x,y) : f(x) y} is a convex set
y
x
f(x)
MIT and James Orlin © 2003
24
Local Minimum Property
A local min of a convex function on a convex feasible region is also a global min.
Strict convexity implies that the global minimum is unique.
The following NLPs can be solved
– Minimization Problems with a convex objective function and linear constraints

MIT and James Orlin © 2003
25
Local minimum property
There is a unique local minimum for the function below.
y
x
f(x)
The local minimum is a global minimum

MIT and James Orlin © 2003
26
Local Maximum Property
A local max of a concave function on a convex feasible region is also a global max.
Strict concavity implies that the global optimum is unique.
Given this, the following NLPs can be solved
– Maximization Problems with a concave objective function and linear constraints
MIT and James Orlin © 2003
27
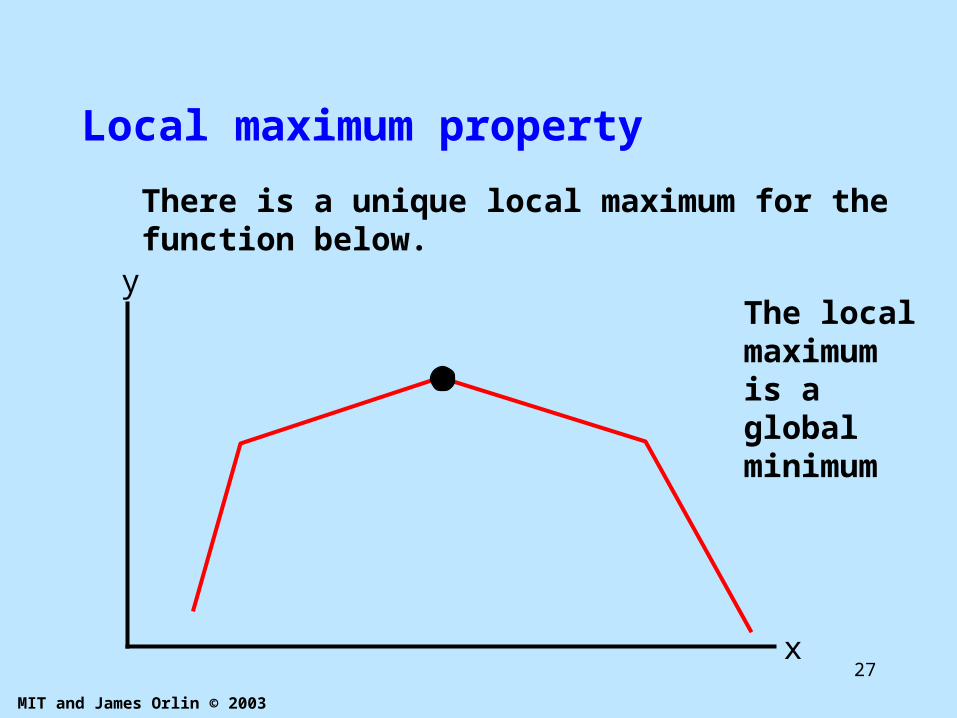
Local maximum property
y
x
There is a unique local maximum for the function below.
The local maximum is a global minimum
MIT and James Orlin © 2003
28
More on local optimality
The techniques for non-linear optimization minimization usually find local optima.
This is useful when a locally optimal solution is a globally optimal solution
It is not so useful in many situations.
Conclusion: if you solve an NLP, try to find out how good the local optimal solutions are.
MIT and James Orlin © 2003
29
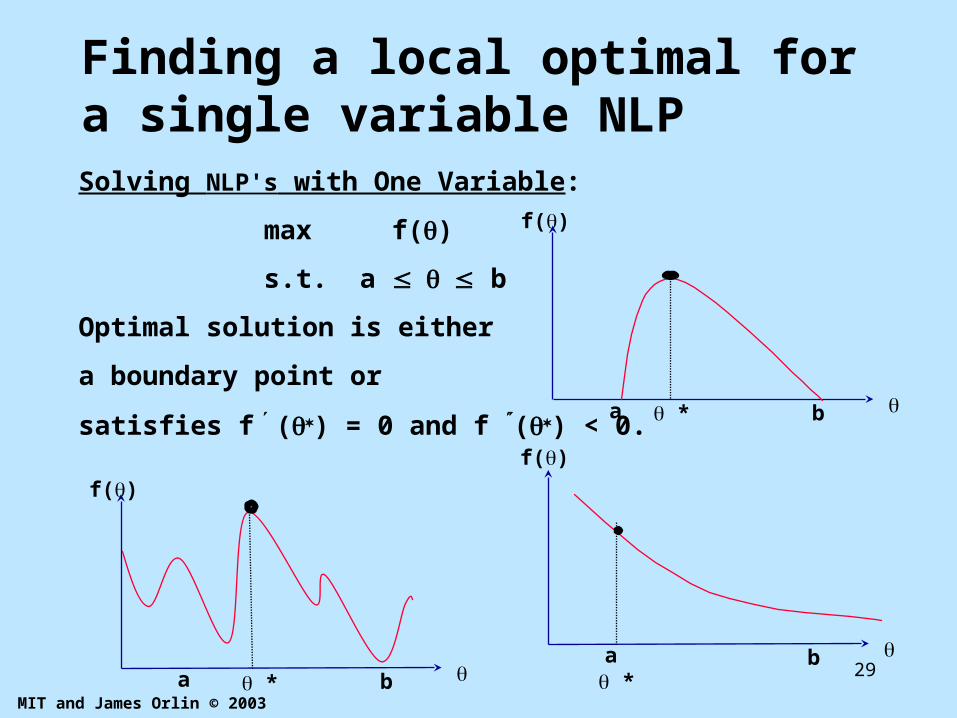
Finding a local optimal for a single variable NLPSolving NLP's with One Variable:
max f()
s.t. a b
Optimal solution is either
a boundary point or
satisfies f() = 0 and f () < 0.
f()
a *
b
f()
a * b
f()
a * b

MIT and James Orlin © 2003
30
Unimodal Functions
A single variable function f is unimodal if there is at most one local maximum (or at most one local minimum) .

MIT and James Orlin © 2003
31
Solving Single Variable NLP (contd.)If f() is concave (or simply unimodal) and differentiable
max f()
s.t. a b
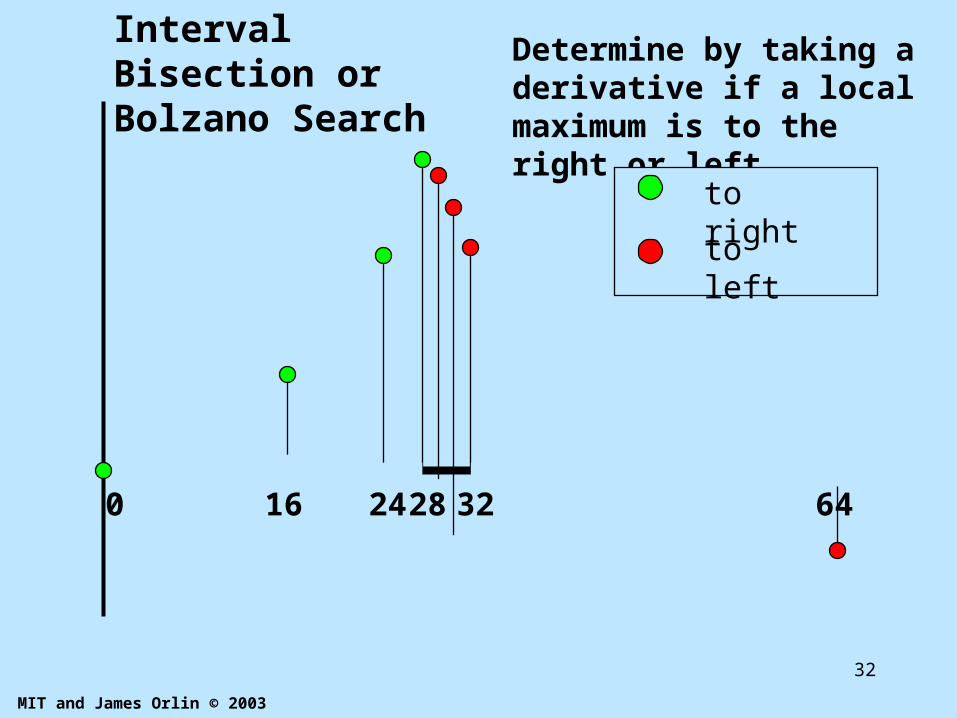
Bisection (or Bolzano) Search:
Step 1. Begin with the region of uncertainty for as [a, b]. Evaluate f() at the midpoint =(a+b)/2.
Step 2. If f() > 0, then eliminate the interval up to . If f() < 0, then eliminate the interval beyond .
Step 3. Evaluate f() at the midpoint of the new interval. Return to Step 2 until the interval of uncertainty is sufficiently small.
MIT and James Orlin © 2003
32
643216 2824
Interval Bisection or Bolzano Search
0
Determine by taking a derivative if a local maximum is to the right or left.
to right
to left

MIT and James Orlin © 2003
33
-15
-10
-5
0
5
10
15
20
25
30
35
40
0 10 20 30 40 50 60 70
MIT and James Orlin © 2003
34
Other Search Techniques Instead of taking derivatives (which may be computationally
intensive), use two function evaluations to determine updated interval.
Fibonacci Search
Step 1. Begin with the region of uncertainty for as [a, b]. Evaluate f() and f() for 2 symmetric points <.
Step 2. If f() f(), then eliminate the interval up to . If f()
f(), then eliminate the interval beyond .
Step 3. Select a second point symmetric to the point already in the new interval, rename these points and such that < and evaluate f() and f(). Return to Step 2 until the interval is sufficiently small.

MIT and James Orlin © 2003
35
On Fibonacci search
1, 1, 2, 3, 5, 8, 13, 21, 34
At iteration 1, the length of the search interval is the kth fibonacci number for some k
At iteration j, the length of the search interval is the k-j+1 fibonacci number.
The technique converges to the optimal when the function is unimodal.
MIT and James Orlin © 2003
36
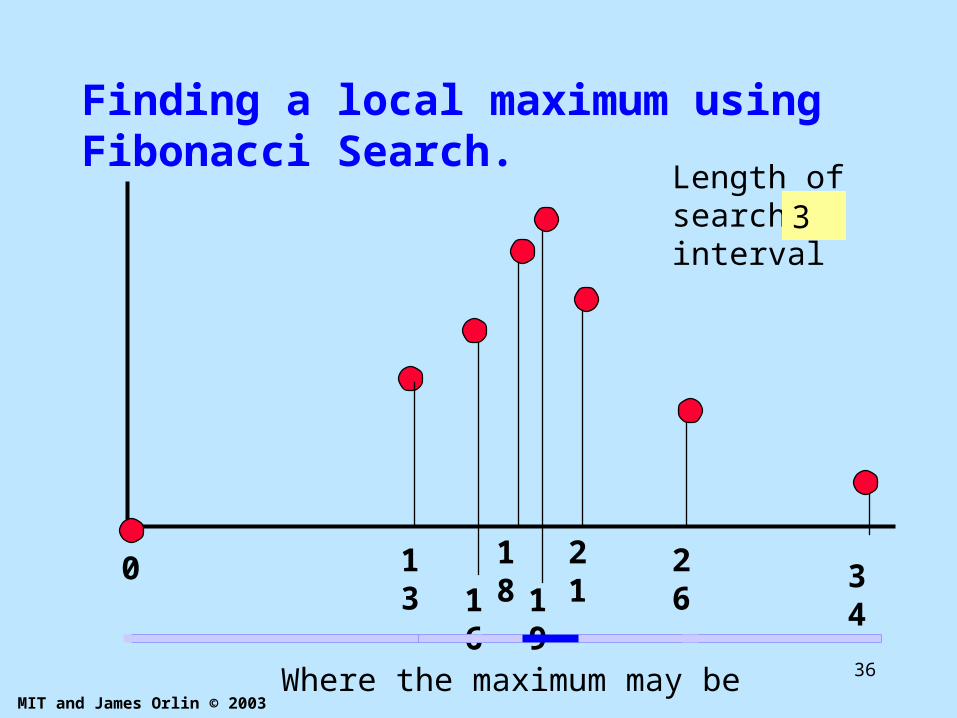
Finding a local maximum using Fibonacci Search.
2113 2618
16 190 34
Where the maximum may be
Length of search interval 342113853
MIT and James Orlin © 2003
37
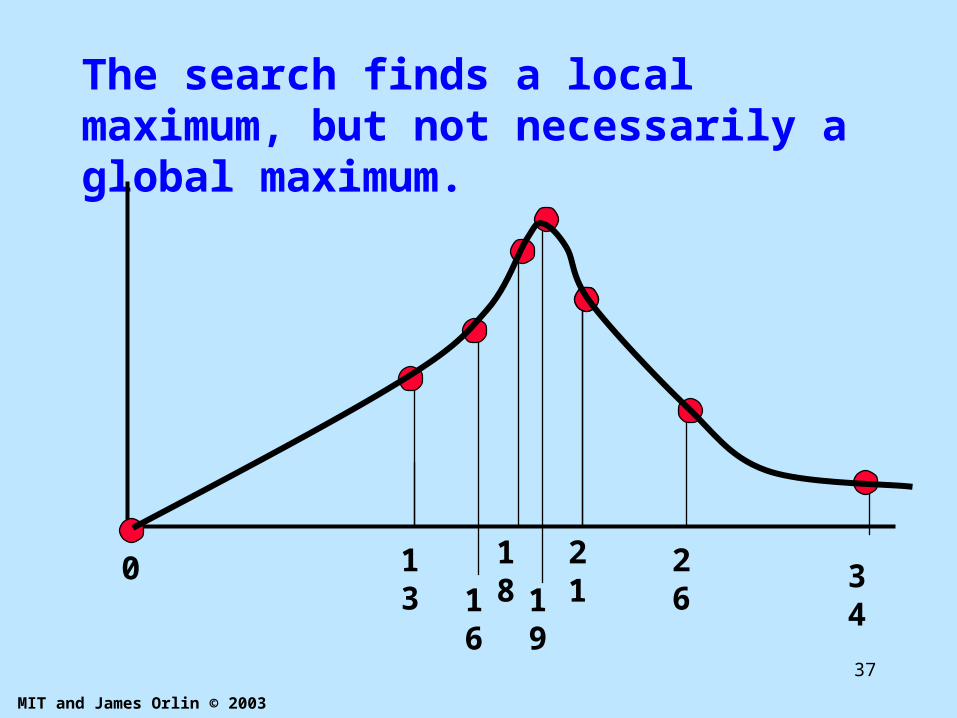
The search finds a local maximum, but not necessarily a global maximum.
2113 2618
16 190 34

MIT and James Orlin © 2003
38
The search finds a local maximum, but not necessarily a global maximum.
2113 2618
16 190 34
MIT and James Orlin © 2003
39
Number of function evaluations in Fibonacci Search
As new point is chosen symmetrically, the length lk of successive search intervals is given by: lk = lk+1 + lk+2 .
Solving for these lengths given a final interval length of 1, ln = 1, gives the Fibonacci numbers: 1, 2, 3, 5, 8, 13, 21, 34,…
Thus, if the initial interval has length 34, it takes 8 function calculations to reduce the interval length to 1.
Remark: if the function is convex or unimodal, then fibonacci search converges to the global maximum
MIT and James Orlin © 2003
40
NLP Summary Convex and Concave functions as well as convex sets
are important properties
Bolzano and Fibonacci search techniques
– used to solve single variable unimodal functions
Related Documents











