MIPI CSI-2℠ CSI-2℠ Application for Vision and Sensor Fusion Systems Richard Sproul – Cadence Design Systems, IP Architect

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MIPI CSI-2℠
CSI-2℠ Application for Vision and Sensor Fusion Systems
Richard Sproul – Cadence Design Systems, IP Architect

Overview • The expanding demand for imaging and vision based
systems in mobile, IoT and automotive products is creating the need for multi-camera and sensor fusion systems to look for novel ways to gather and process multiple camera/sensor data streams whilst still fitting into the mobile interface.
• The presentation will highlight some of the key details and requirements for a system with image processing of a multi-camera/sensor system.
2

CSI-2 Application for Multi-Sensor Systems Multi-Camera Applications
• Imaging applications are everywhere • Mobile Phone
– Selfie Picture in Picture – Gesture Recognition
• Video Games – Gesture Recognition
• Autonomous Driving – Pedestrian Detection
– Signage Recognition – Night Vision – Parallel Parking!
• In-Car Control – Gesture Recognition

4
Morethanthenakedeye…
CSI-2 Application for Multi-Sensor Systems Machine Vision

5
CSI-2 Application for Multi-Sensor Systems Camera Applications Op0malpathwayformul0pleforward-lookingadvancementsinimaging–KeyDrivers:Health,Convenience,Security,Lifestyle,Efficiency–High-perfpixelconduitneedsmetwithC/D-PHYadvancements–Broaddefini0onsandfuzzyrange:(i.e.Wearable:NearBody,OnBody,InBody)•Explorepossibili0esofoverlapbetweenImagingandlow-speedsensorrequirementsandsolu0ons
CameraControllerInterface(CCI/CCS)advancementconsidera0ons:-Point-to-PointandMul0-Dropconfigura0ons-Energyconsumed/Gbtransfer-LimitlatencyforVB&HB-PrecisionTiming&Sync-IndependentTransport:PixelData&Control-ChannelIntegrity(ErrorDetec0on)-FWUpload(ISP,Neural)

• Options for physical interface • Pins, legacy, bandwidth
6
CSI-2 Application for Multi-Sensor Systems MIPI CSI-2 Interfaces

• Evolution of the CSI-2
7
CSI-2 Application for Multi-Sensor Systems CSI-2 Generations

8
CSI-2 Application for Multi-Sensor Systems CSI-2 Performance
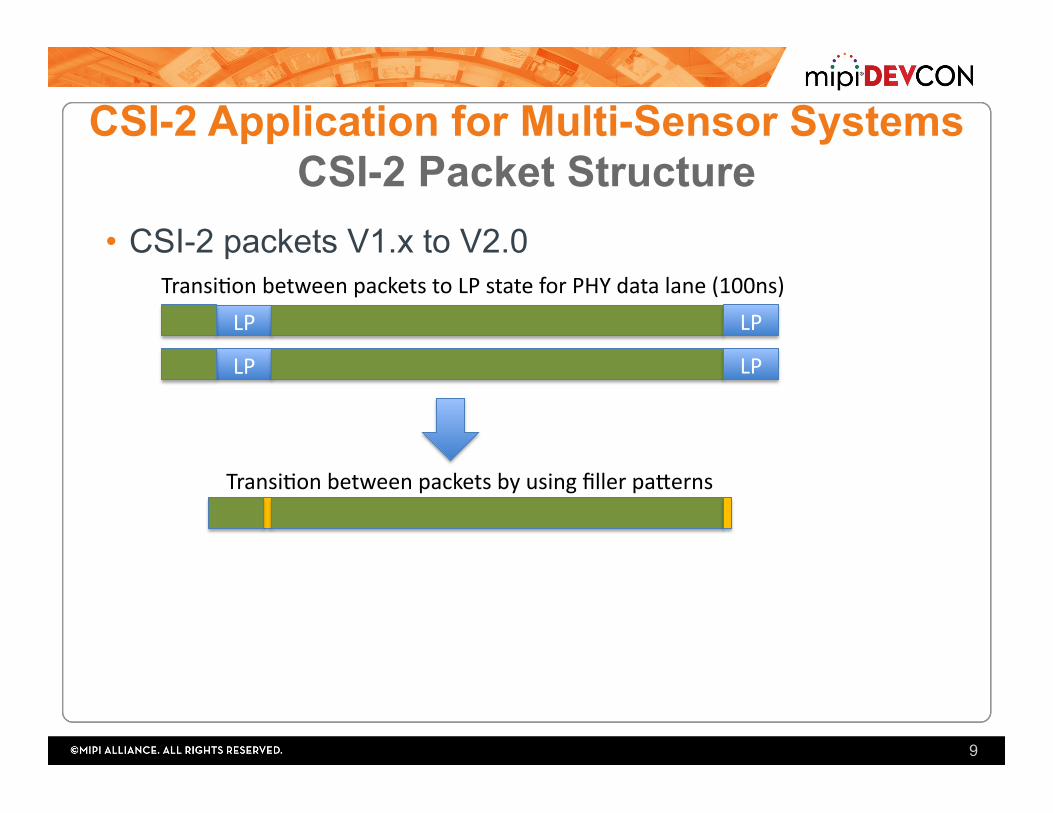
• CSI-2 packets V1.x to V2.0
9
LP
LP
LP
LP
Transi0onbetweenpacketstoLPstateforPHYdatalane(100ns)
Transi0onbetweenpacketsbyusingfillerpa_erns
CSI-2 Application for Multi-Sensor Systems CSI-2 Packet Structure

• Improve the effective bandwidth
10
0
20
40
60
80
100
120
1000 1250 1500 1800 2000 2250 2500
Fram
eRatefp
s
BitRate(Mbps)
CSI-2FrameRateImprovementV1.xtoV2.x1920x1080RAW12
FPS(V1.x) FPF(V2.x)
CSI-2 Application for Multi-Sensor Systems CSI-2 Packet Transmission

• Automotive application for driver assistance - External systems and for in-car control
• Objects• Highresolu0on
• NightimageandIR
• In-cargesture
• Peopledetec0on
• Mediumresolu0on
• Roadsignage• Mediumresolu0on
Parkingassistance
CSI2 Application for Multi-Sensor Systems Advanced Driver-Assistance System

CSI-2 Application for Multi-Sensor Systems • Application in a Multi-Camera Platform
12
Automotive AV Reference Subsystem
MIPIDPHY
AudioDSP
$I $D
System Interconnect
Image/VisionDSP
DMA I-RAM D-RAM
AXI2AHB
UART I2C
32bAPB
TimerI2S GPIO
AHB2APB
32bAHB
QSPI
SoundWire
Audio
USB2/3device
EthernetMAC
On-ChipSystemSRAM
1300MT/sDDR3
Controller
DDR-PHY
64bDDR3SODIMM
SDSDIOeMMC
Display
Inm.
BRPHY
USBPHY
Pixel2AXI
ColorConver
tVideoScalar
HDMIPHY
Image/VisionDSP
DMA I-RAM D-RAM
MIPICSI-2Rx
MIPICSI-2RX
MIPICSI-2Rx
MIPIDPHY
MIPIDPHY
SensorDSP
$I

13
CSI-2 Application for Multi-Sensor Systems Sensors Everywhere

• The data does not have to be images… • LiDAR
• The resolution is low (IR RAW data, typically 64 pixels high, though much more horizontally)
• Range is limited. Typical LiDARs see well to about 70 metres. • Refresh rates tend to be slower, at around 10fps.
• RADAR • Long range – cruise control, brake assist
• Ultrasonic • Short-range parking assist • Self parking ☺
• Protocol support with user-defined data to transfer the bytes
14
CSI-2 Application for Multi-Sensor Systems CSI-2 for Sensors

CSI-2 Application for Multi-Sensor Systems CSI-2 Example Video Frame
• Bandwidth on CSI-2 V1.1 – 4 Lanes 6Gbps • So with our 30fps, we have 200M bit to use
• 3 HD camera RGB888 1920x1200x24=165.888M • Also adding 100ns gaps (150 bit clocks) • 3 x(1920x24) +3x150 = 138240 • Embedded data line with image processed data (clusters, edges)

16
CSI-2TXController
VideoBuffer
CentralizedECUforInfotainmentorADAS
Pixel
Pixel
Data
Data
SensorDSP
SensorDSP
PCIe
SensorDSP
I2S
I2S I2SSoundW
ire
eMMC
AppsUSB
DSI
DDR
DPHY
PCIePHY
USBPHY
Sensor
Sensor
VideoEP
VideoEP
PPI
PPI
DPHY
DPHY
Pixel
Pixel
PHY
Data
Data
CSI-2 domain
VideoBuffer
DataBuffer
DataBuffer
I2SSoundW
ire
SensorDSP
CSI-2RXCTRL
VisionDSP
CSI-2
VisionDSP
CSI-2
CSI-2 Application for Multi-Sensor Systems CSI-2 Sensor Fusion Example
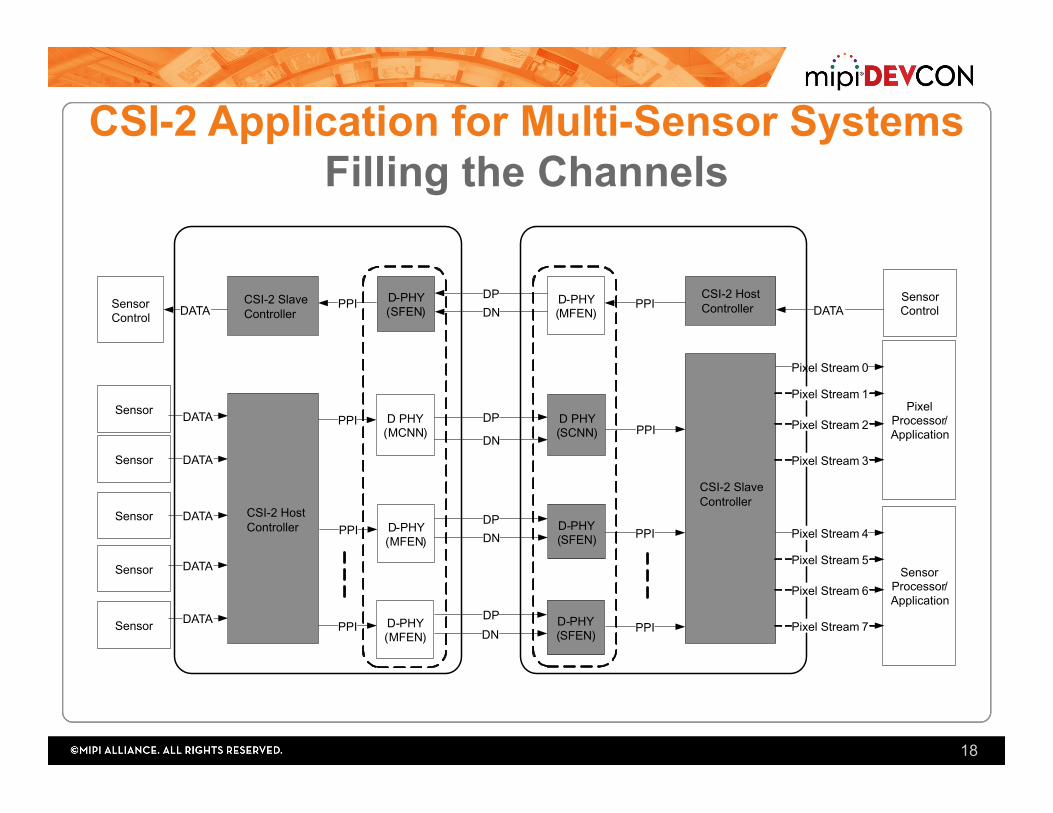
• Sensor Fusion ADAS System Topology • Merge the data from image and other sensors • Pre-processing the inline data for the application

• Image Processing and the Application • Application processing will need to perform the ADAS system and
sensor analysis
17
CSI2 Application for Multi-Sensor Systems CSI-2 Sensor Fusion Example
18
CSI-2 Application for Multi-Sensor Systems Filling the Channels
D PHY ( MCNN )
D - PHY ( MFEN )
Pixel Processor / Application
DP
DP DN
DN D PHY ( SCNN )
D - PHY ( SFEN )
Pixel Stream 0
PPI
PPI
D - PHY ( MFEN )
DP DN D - PHY
( SFEN ) PPI
Pixel Stream 1 Pixel Stream 2 Pixel Stream 3
Sensor Processor / Application
Pixel Stream 4 Pixel Stream 5 Pixel Stream 6 Pixel Stream 7
CSI-2 Host Controller
PPI
PPI
PPI
D - PHY ( MFEN ) D - PHY
( SFEN ) DP DN CSI-2 Slave
Controller PPI PPI Sensor Control Sensor
Control
Sensor
Sensor
Sensor
Sensor
Sensor DATA
DATA
DATA
DATA
DATA
DATA DATA
CSI-2 Slave Controller
CSI-2 Host Controller

19
CSI-2 Application for Multi-Sensor Systems Physical Interface

CSI-2 Application for Multi-Sensor Systems CSI-2 Example Video Frame
• Bandwidth on CSI-2 V1.1 – 4 Lanes 6Gbps – Using LS/LE to keep synchronisation and sequence – Use the virtual channel to identify the sensor – Use the data types (RAW, RGB, YUV and user defined) – Use the short packet sync events
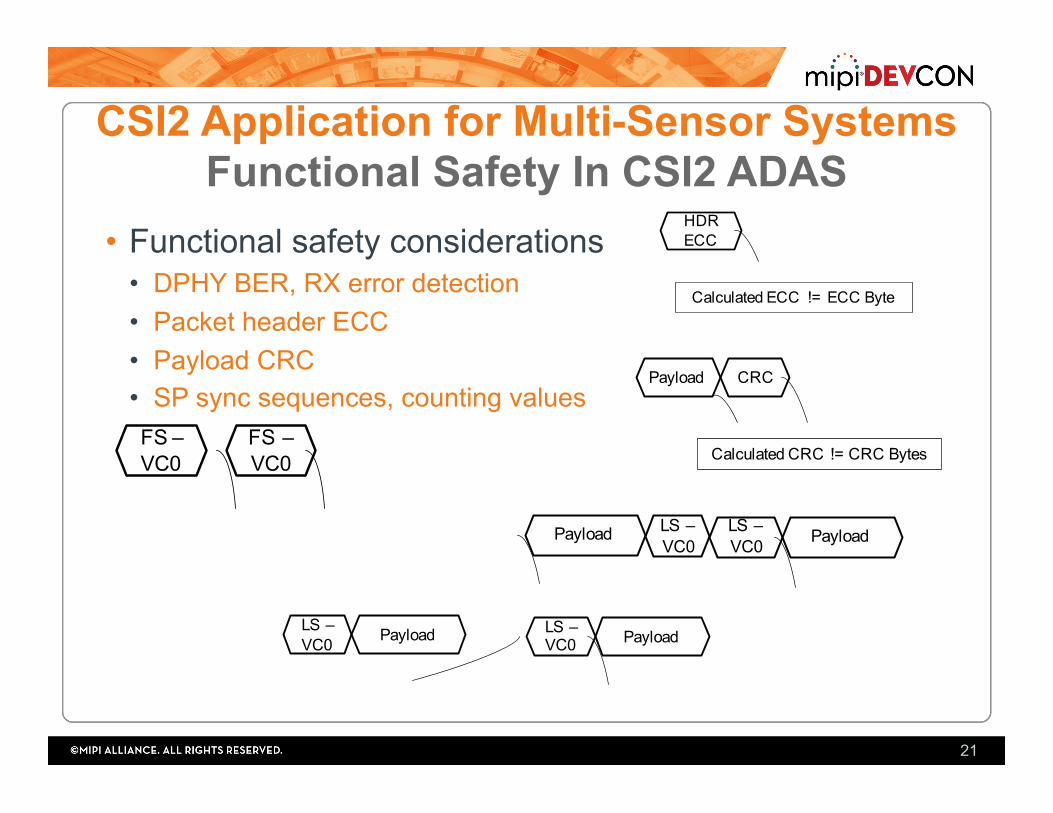
• Functional safety considerations • DPHY BER, RX error detection • Packet header ECC • Payload CRC • SP sync sequences, counting values
21
CSI2 Application for Multi-Sensor Systems Functional Safety In CSI2 ADAS

• Pitfalls of interleaved streams
22
CSI-2 Application for Multi-Sensor Systems CSI-2 Interleaving Data

23
CSI-2 Application for Multi-Sensor Systems CSI-2 Interleaving

CSI-2 Beyond Mobile
24
CSI-2 Beyond Mobile • System architecture considerations for CNN
applications: • Assist • Co-pilot • Automated
• Optimal platform arch for the CNN engines • Central processing (+SW dev, lacks scalability / modularity, cost
may not align w/ entry-level cars) • Distributed processing (plug-and-play, scalable, each camera unit
enhances capability, complex system) • AlgoEngine: CPU / GPU / DSP / FPGA
• Overall risks and uncertainty: • Market, product, execution, timing, regulators, infrastructure
25
CSI-2 Beyond Mobile • What can technology do for us?
• Imaging: digital photography vs. vision • Scene capture, object capture & track, modeling & measurement
• Perception and decision-making using real-time streaming image data: • Camera, RADAR, LiDAR, sonar (varying detection capabilities vs.
cost)
• Performance vs robustness – consequence of error • Camera position, lighting, environmental factors, required accuracy
for object detection
26
Related Documents











