Torque Control of a DC motor 1 Author: University of Hertfordshire Date created: Date revised: 2009 Abstract The following resources come from the 2009/10 BEng in Electrical Engineering (course number 2ELE0066) from the University of Hertfordshire. All the mini projects are designed as level two modules of the undergraduate programmes. To demonstrate within an industrial environment: •To use Matlab® (Simulink®) •To implement an appropriate analogue computer for modelling dynamic systems. A DC motor model, in specific prototyping stages, is more appropriate to use than the actual DC motor. This project aimed to design and implement a DC motor model by using a simulation package (CAD) such as Matlab and implement the equivalent electronic hardware platform. © University of Hertfordshire 2009 This work is licensed under a Creative Commons Attribution 2.0 License .

Miniprojecttorquecontrolofadcmotor 100215060150-phpapp01
Aug 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Torque Control of a DC motor
1
Author: University of HertfordshireDate created:Date revised: 2009
AbstractThe following resources come from the 2009/10 BEng in Electrical Engineering (course number 2ELE0066) from the University of Hertfordshire. All the mini projects are designed as level two modules of the undergraduate programmes. To demonstrate within an industrial environment:•To use Matlab® (Simulink®)•To implement an appropriate analogue computer for modelling dynamic systems.
A DC motor model, in specific prototyping stages, is more appropriate to use than the actual DC motor. This project aimed to design and implement a DC motor model by using a simulation package (CAD) such as Matlab and implement the equivalent electronic hardware platform.
© University of Hertfordshire 2009 This work is licensed under a Creative Commons Attribution 2.0 License.
Contents Section 1. Introduction 3 Section 2. Module Format 4 Section 3. Project Day 1 Brief 7 Section 4. Project Day 2 Brief 9 Section 5. Lecture Resources 10
A. First Order Systems 10 B. Second Order Systems 11 C. Simulink® 12 D. Unity Feedback Control 13 E. SISO tool 14 F. Summary 15
Assessment 17 Credits 20
In addition to the resources found below there are supporting documents which should be used in combination with this resource. Please see:
Mini Projects - Introductory presentation. Mini Projects - E-Log. Mini Projects - Staff & Student Guide. Mini Projects - Standard Grading Criteria. Mini Projects - Reflection.
You will also need the ‘Mini Project Torque Control of a DC Motor’ Word document.
2
(c) University of Hertfordshire
Introduction
During this mini project the design of a torque control for a DC motor is to be considered. In order to design this system the following subjects need to be considered:
•First order systems and how are they designed.•Second order systems and how are they designed.•How to build models and validate their operation.
The motor torque controller should have the following characteristics:Settling Time: x secOvershoot : x%
(c) University of Hertfordshire 3

3 weeks 3 Weeks 3 Weeks General Module
Introduction Project 1 Project 2 Project 3
Series of three short projects
Three key areas of your chosen field of study

What is it?• Given a task• Work out how to solve it yourself – just like you will
have to at work• Staff try to help you to work it out rather than giving
answer
Why use Problem based approach?• Extremely powerful and effective technique• Can increase self-confidence and resourcefulness • Skills highly valued by employers

Week 1 29/01/2009 Week 2 5/02/2009 Week 3 12/02/2009
Introductory Lecture and preparation session
Project Day 1 Project Day 2
In week 1: A two-hour introductory lecture A 3-hour preparation session
Weeks 2 & 3 6-hour practical session Find out goal for the day when you arrive Deliver solution by the end of the day



First order Systems
Screen shots taken from Matlab® Simulink ®, The MathWorks, Inc. 10

11
Second Order Systems
Screen shots taken from Matlab® Simulink ®, The MathWorks, Inc.
12
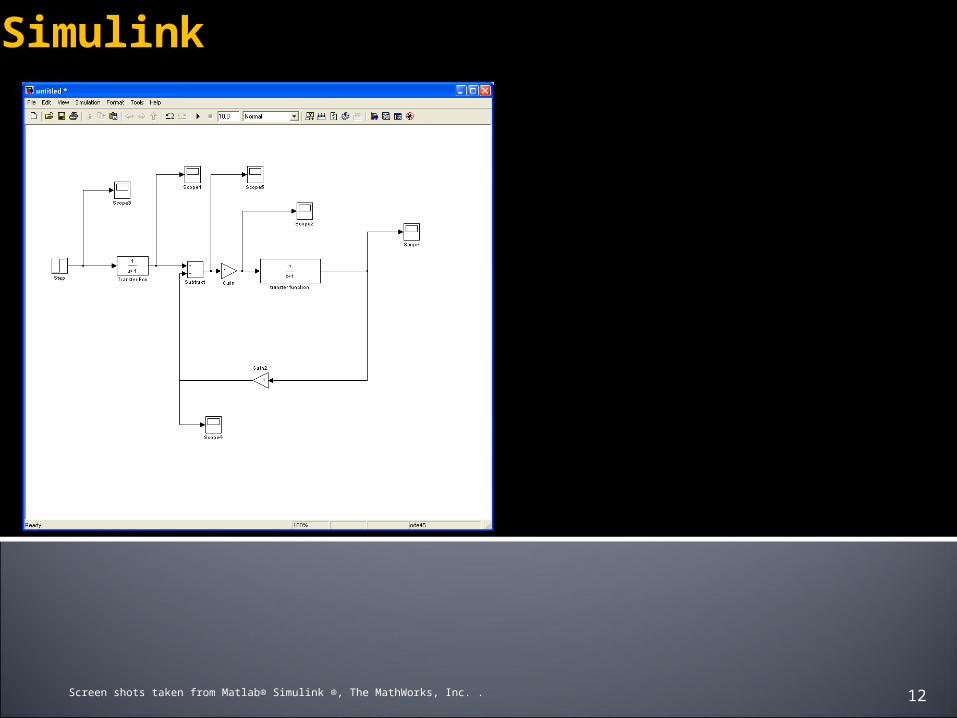
Simulink
Screen shots taken from Matlab® Simulink ®, The MathWorks, Inc. .

13
PI controller
PI Controller The PI Controller consists ofAn amplifier (proportional part), and an integrator.

14
SISO tool
Screen shots taken from Matlab® Simulink ®, The MathWorks, Inc.

15
Summary
•Introduction to first order and second order systems. •Most of real life systems can be build by cascading this simple systems in series. •An example of using the Single Input Single Output (SISO) tool has been given. This was to demonstrate the power of Root Locus analysis and how to select the location of zeros and poles.
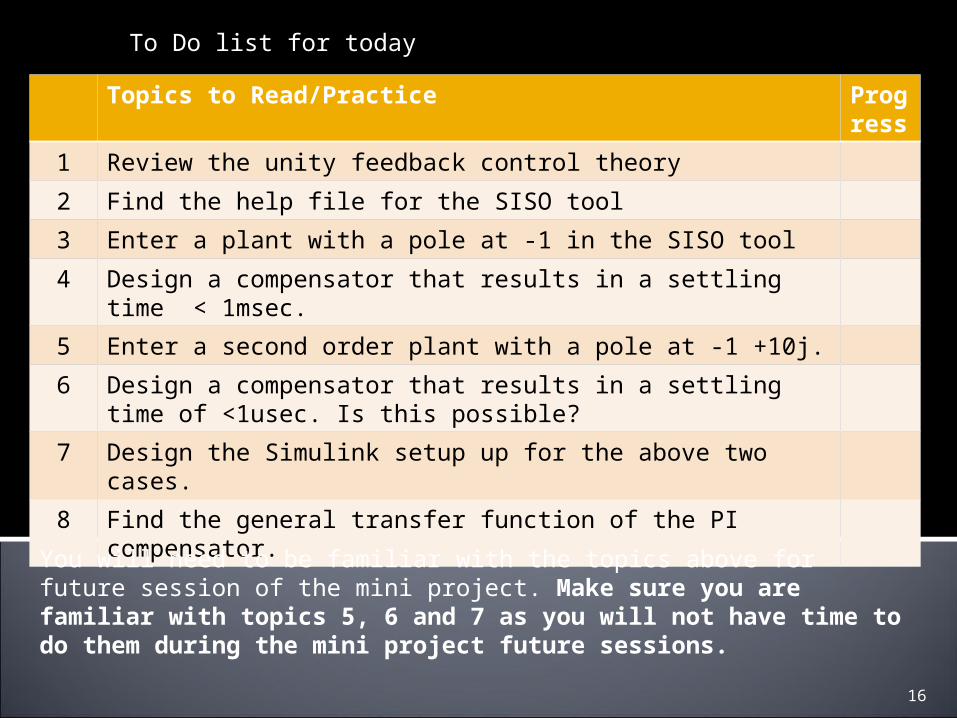
Topics to Read/Practice Progress
1 Review the unity feedback control theory
2 Find the help file for the SISO tool
3 Enter a plant with a pole at -1 in the SISO tool
4 Design a compensator that results in a settling time < 1msec.
5 Enter a second order plant with a pole at -1 +10j.
6 Design a compensator that results in a settling time of <1usec. Is this possible?
7 Design the Simulink setup up for the above two cases.
8 Find the general transfer function of the PI compensator.
To Do list for today
You will need to be familiar with the topics above for future session of the mini project. Make sure you are familiar with topics 5, 6 and 7 as you will not have time to do them during the mini project future sessions.
16

Lab-based Staff assess progress throughout session Submission of work at the end of the day
Marks available for practical sessions: • Preparation session (10%)• Project Day 1 (30%)• Project Day 2 (30%)

Mark availability:• Formal report (30%) • Three Completed reflection sheets (one after each
practical session) Practical marks for the day WILL BE HALVED if not
submitted!
Use correct templates and submit in .PDF format only.
Templates and deadlines in “Assignments” on Studynet
Turn up to everything – there is no referral for the practicals, only repeat!
Plan - break down the day’s objective into a series of smaller tasks each morning before you start work
Monitor your own progress during the day Submit everything correct format, correct
template, on time Use reflection to improve your performance as
the course progresses

This resource was created by the University of Hertfordshire and released as an open educational resource through the Open Engineering Resources project of the HE Academy Engineering Subject Centre. The Open Engineering Resources project was funded by HEFCE and part of the JISC/HE Academy UKOER programme.
© University of Hertfordshire 2009
This work is licensed under a Creative Commons Attribution 2.0 License.
Screen shots taken from Matlab® and/or Simulink ®, both of which are trade marks of The MathWorks, Inc.
The JISC logo is licensed under the terms of the Creative Commons Attribution-Non-Commercial-No Derivative Works 2.0 UK: England & Wales Licence. All reproductions must comply with the terms of that licence.
The HEA logo is owned by the Higher Education Academy Limited may be freely distributed and copied for educational purposes only, provided that appropriate acknowledgement is given to the Higher Education Academy as the copyright holder and original publisher.
Related Documents