MICROSCOPIA A FORZA ATOMICA UNIVERSITÀ DEGLI STUDI DI CAGLIARI DIPARTIMENTO DI INGEGNERIA ELETTRICA ED ELETTRONICA (AFM) Bioingegneria elettronica MONIA DEMELAS [email protected] A.A. 2010/2011

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MICROSCOPIA A FORZA ATOMICA
UNIVERSITÀ DEGLI STUDI DI CAGLIARI
DIPARTIMENTO DI INGEGNERIA ELETTRICA ED ELETTRONICA
MICROSCOPIA A FORZA ATOMICA(AFM)
Bioingegneria elettronica
MONIA DEMELAS
A.A. 2010/2011
1. Introduzione alla “microscopia a forza atomica”
2. Principio fisico
3. Come è fatto lo strumento: sistema di sensing e motore
SOMMARIO
3. Come è fatto lo strumento: sistema di sensing e motore
4. Modalità di funzionamento: statico e dinamico, …
5. Applicazioni
6. Punti di forza e limiti
Atomic Force Microscopy (AFM) èun microscopio inventato daGerd Binnig, Calvin Quate eChristoph Gerber nel 1986.
Può essere impiegato per lostudio di substrati sia spessi che
AFM
studio di substrati sia spessi chesottili quali ceramiche, vetri,membrane sintetiche e biologiche,metalli, polimeri, semiconduttori,etc.
In generale è una tecnica nondistruttiva che non richiedel’applicazione di specificitrattamenti preliminari suicampioni.
UTILIZZO DELL’AFM
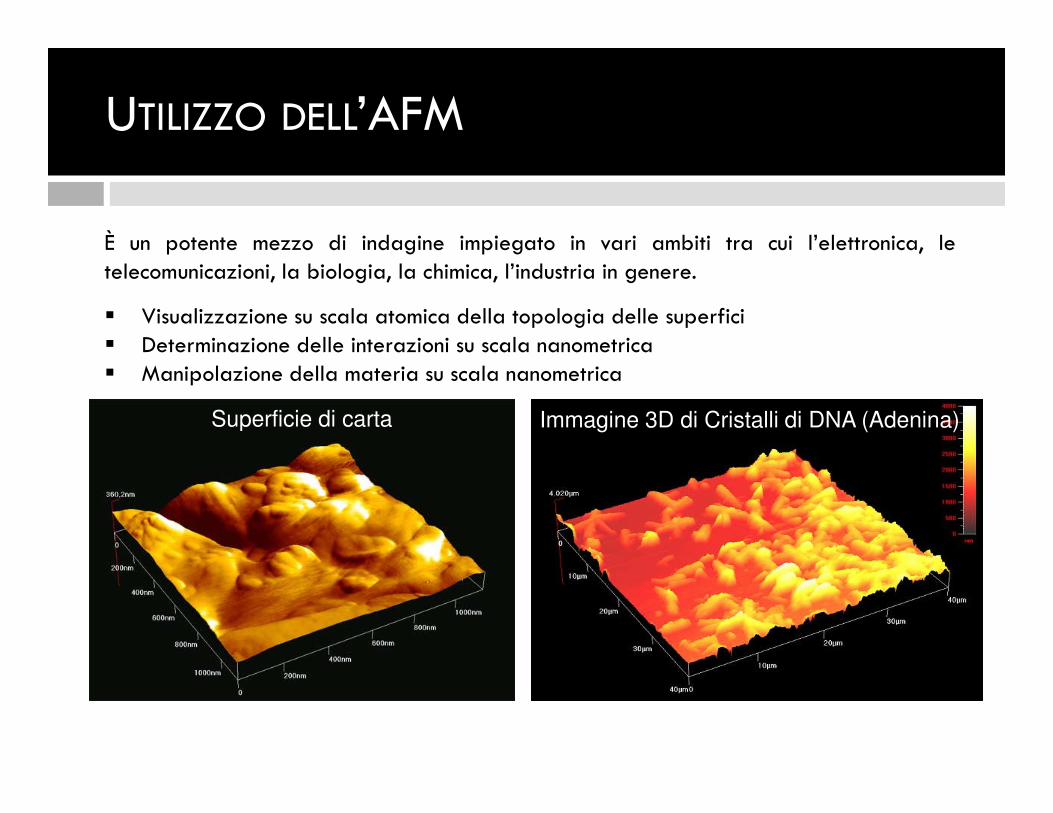
Superficie di carta
È un potente mezzo di indagine impiegato in vari ambiti tra cui l’elettronica, letelecomunicazioni, la biologia, la chimica, l’industria in genere.
� Visualizzazione su scala atomica della topologia delle superfici� Determinazione delle interazioni su scala nanometrica� Manipolazione della materia su scala nanometrica
Immagine 3D di Cristalli di DNA (Adenina)Superficie di carta

UTILIZZO DELL’AFM
È un potente mezzo di indagine impiegato in vari ambiti tra cui l’elettronica, letelecomunicazioni, la biologia, la chimica, l’industria in genere.
� Visualizzazione su scala atomica della topologia delle superfici� Determinazione delle interazioni su scala nanometrica� Manipolazione della materia su scala nanometrica
Interazione legando-recettore in una cellula
vivente.

UTILIZZO DELL’AFM
Xe su Ni
È un potente mezzo di indagine impiegato in vari ambiti tra cui l’elettronica, letelecomunicazioni, la biologia, la chimica, l’industria in genere.
� Visualizzazione su scala atomica della topologia delle superfici� Determinazione delle interazioni su scala nanometrica� Manipolazione della materia su scala nanometrica
Xe su NiPrimo esempio di manipolazione
di superfici a livello atomico

LO STRUMENTO
L’AFM si presenta come “unascatola” all’interno della quale èpresente una scheda elettronicache controlla il movimento di unasonda di dimensioni nanometriche.sonda di dimensioni nanometriche.
Un laser inviato sulla microlevaviene da questa riflesso econvogliato su un fotodiodorilevandone lo spostamento aseguito dell’interazione con ilcampione.

Forza Proprietà Raggio d’azione Intensità relativa
Gravitazionale Massa ∞ 10-36
PRINCIPIO FISICO
Gravitazionale Massa ∞ 10-36
Elettromagnetica Carica elettrica ∞ 1
Forte Carica colore (particelle subnucleari) 10-15 m 102
Debole Leptoni (particelle elementari) 10-17 m 10-4

L’interazione tra due corpi può essere trattata assimilandoli a due sfere
Basandosi su considerazioni di carattere fenomenologico, Lennard-Jones ha ipotizzatoper l’interazione tra atomi e molecole il seguente potenziale
PRINCIPIO FISICO
( ) Potenziale di Mien m
A Bw r
r r= − +
( ) = − +6 12
A Bw r
r r
Quando due atomi si avvicinano, le loro distribuzionidi carica si sovrappongono gradualmente.Aumentando la sovrapposizione elettronica, l’energiatotale del sistema cresce e dà luogo al contributorepulsivo a corto raggio nell’interazione.
Negli atomi a simmetria sferica si possono generaredei momenti di dipolo in grado di indurre a lorovolta momenti di dipolo negli atomi circostanti; sipossono avere interazioni a lungo raggio di tipodipolo-dipolo, dipolo-dipolo indotto (Van derWaals), dipolo indotto - dipolo indotto (forze didispersione), elettrostatiche ed effetti di capillarità.

MODELLO DI INTERAZIONE
Il minimo è associato alla condizione di equilibrio tra il termine repulsivo e quello attrattivo e si ottiene per
= − = 0d w
Fd r
− =7 13
6 12 0A B
r r= 6 2e
Br
A
−=
6
13
26 0r A B
r=
6
1
2e
A
r B
−= 77 610 J mAPer due atomi = =6
20.3550 nm
Bre
r0
r r
( )w r
0r er sr
( ) ( )= − +6 12
Lennard-JonesA B
w rr r
( ) = − + = − = −2
6 6 62 2 4e
e e e
A A A Aw r
r r r B
( )( )
= − =6
min
6
2 1
2e e
VanDerWaals e
e
A
w r r
Aw r
r
−= 134 1210 J mBPer due atomi = =6 0.3550 nmer
Ae
r0
r r0 e sr
La forza di adesione è massima è massima per =2
20
d w
d r
− − ⋅ =8 14
42 12 13 0A B
r r
− +=
6
14
7 266 0Ar B
r= =6
260.3935 nm
7s
Br
A
−
= =
−
= − = − + = = − ⋅
2
11
7 13
6
126
1696 12 1.89 10 N26
7s s
MAX
r r r r
Adw A B BFdr r r B
A
( ) =0 0w r
− +=
6
120
Ar B
r
= =
1
6
0 0.3162 nmB
rA
= − = =
6
6
0 6
2
2 1.12e
B
r A
r B
A
Il potenziale è nullo per
MECCANISMO DI SENSING
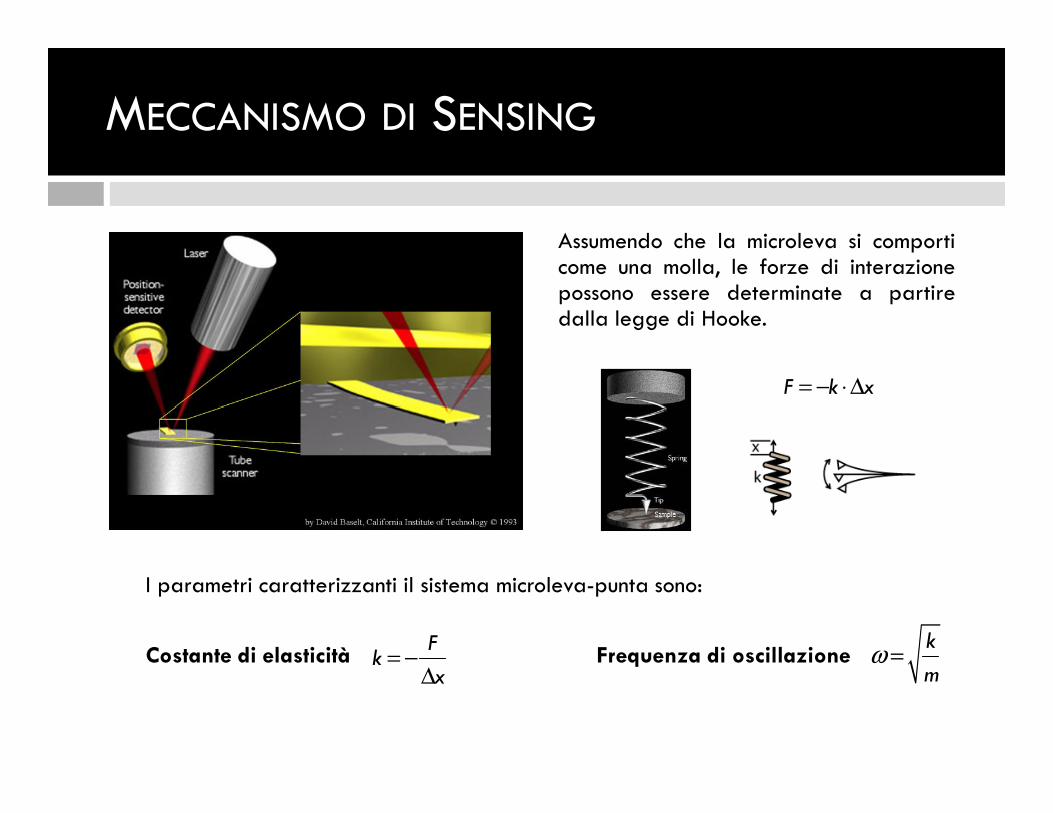
Assumendo che la microleva si comporticome una molla, le forze di interazionepossono essere determinate a partiredalla legge di Hooke.
F k x= − ⋅∆
I parametri caratterizzanti il sistema microleva-punta sono:
Costante di elasticità Frequenza di oscillazione ω =k
m= −
∆
Fk
x
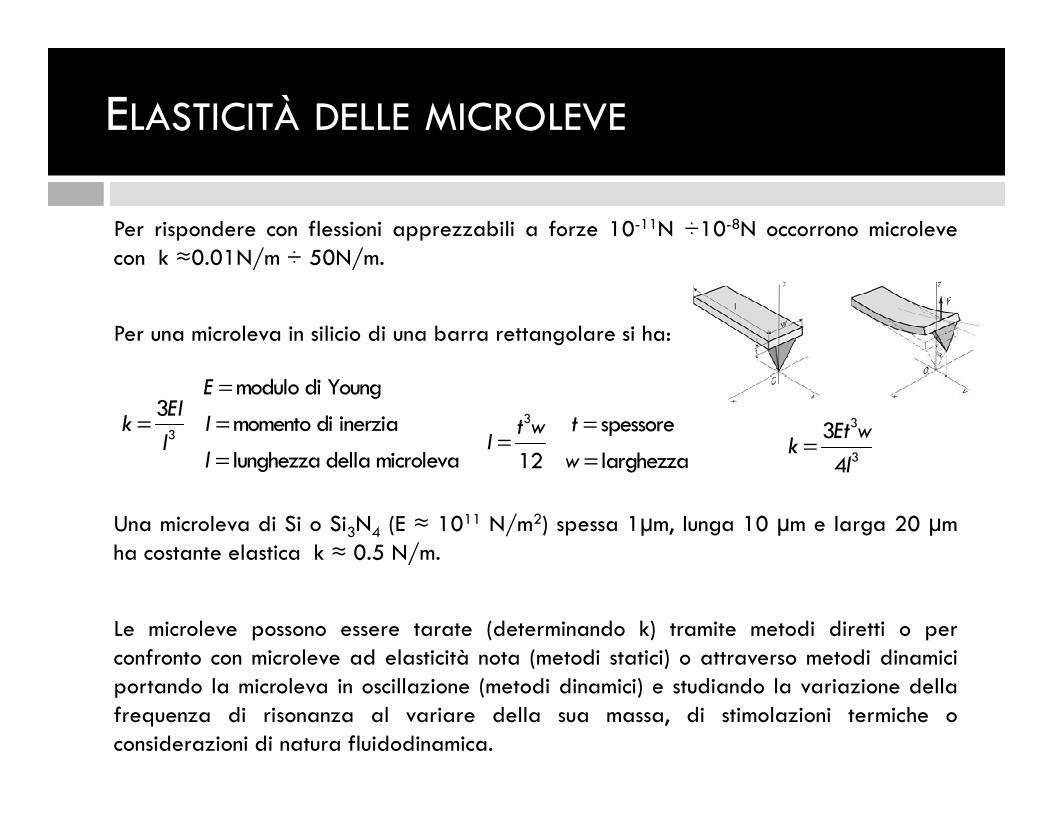
Per rispondere con flessioni apprezzabili a forze 10-11N ÷10-8N occorrono microlevecon k ≈0.01N/m ÷ 50N/m.
Per una microleva in silicio di una barra rettangolare si ha:
ELASTICITÀ DELLE MICROLEVE
modulo di Young 3E
EI=
= = =
Una microleva di Si o Si3N4 (E ≈ 1011 N/m2) spessa 1µm, lunga 10 µm e larga 20 µmha costante elastica k ≈ 0.5 N/m.
Le microleve possono essere tarate (determinando k) tramite metodi diretti o perconfronto con microleve ad elasticità nota (metodi statici) o attraverso metodi dinamiciportando la microleva in oscillazione (metodi dinamici) e studiando la variazione dellafrequenza di risonanza al variare della sua massa, di stimolazioni termiche oconsiderazioni di natura fluidodinamica.
3
3 momento di inerzia
lunghezza della microleva
EIk Ill
= =
=
==
=
3 spessore
larghezza12
tt wI
w=
3
3
3
4
Et wk
l

TIPOLOGIE DI MICROLEVE
Le leve più flessibili sono ricavate, mediante tecnica fotolitografica da Si o Si3N4.
Microleve di a forma di barra rettangolare offrono una buona sensibilità alla forzalaterale e sono meccanicamente delicate.
Microleve con pianta a “V” hanno costanti elastiche pari al doppio della costanteelastica dei due bracci e sono meno sensibili agli sforzi di torsione.
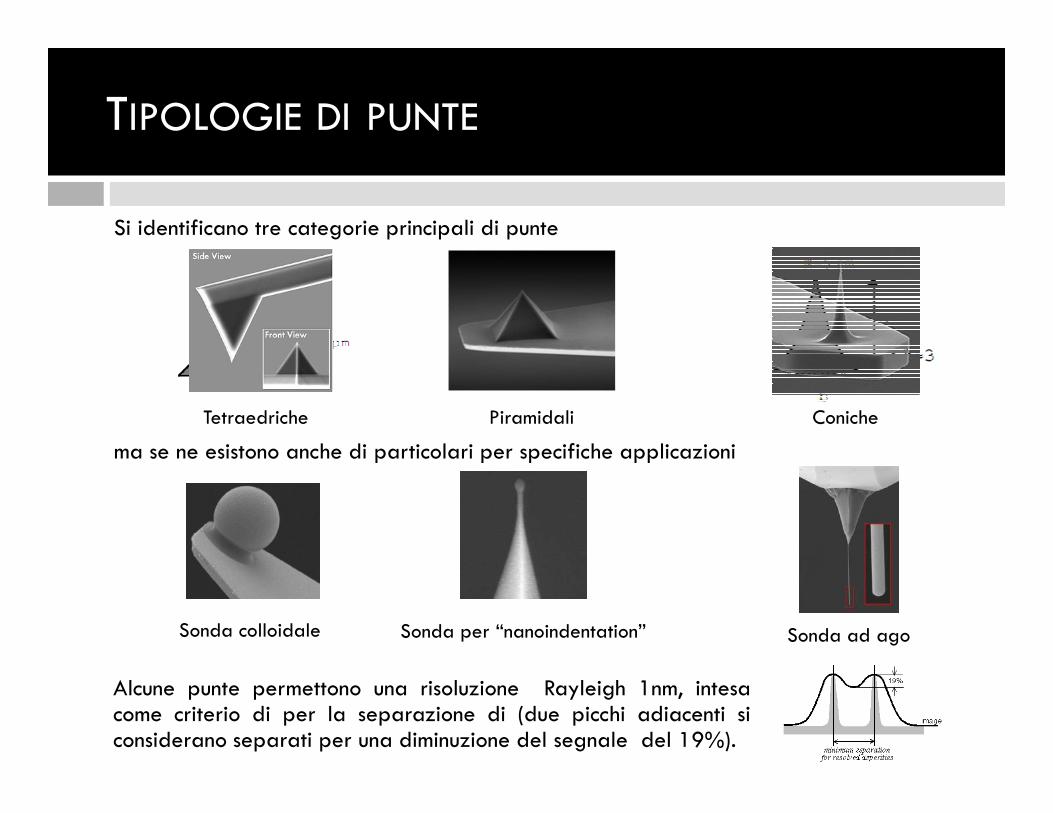
Si identificano tre categorie principali di punte
TIPOLOGIE DI PUNTE
Tetraedriche Piramidali Coniche
ma se ne esistono anche di particolari per specifiche applicazioni
Tetraedriche Piramidali Coniche
Sonda per “nanoindentation”Sonda colloidale Sonda ad ago
Alcune punte permettono una risoluzione Rayleigh 1nm, intesacome criterio di per la separazione di (due picchi adiacenti siconsiderano separati per una diminuzione del segnale del 19%).

La forza misurata dalla leva è la somma delle forze tra tutti gli atomi dell’estremitàdella punta e del campione ad essa affacciati; l’immagine risultante è la convoluzionedella forma della punta e della forma del campione.
Posto R = raggio della punta; r = raggio dell’oggetto in esame
PROPRIETÀ DELLE PUNTE
R ≈ rR ≈ r
R << r
L’accumulo di detriti puòdistorcere le immagini
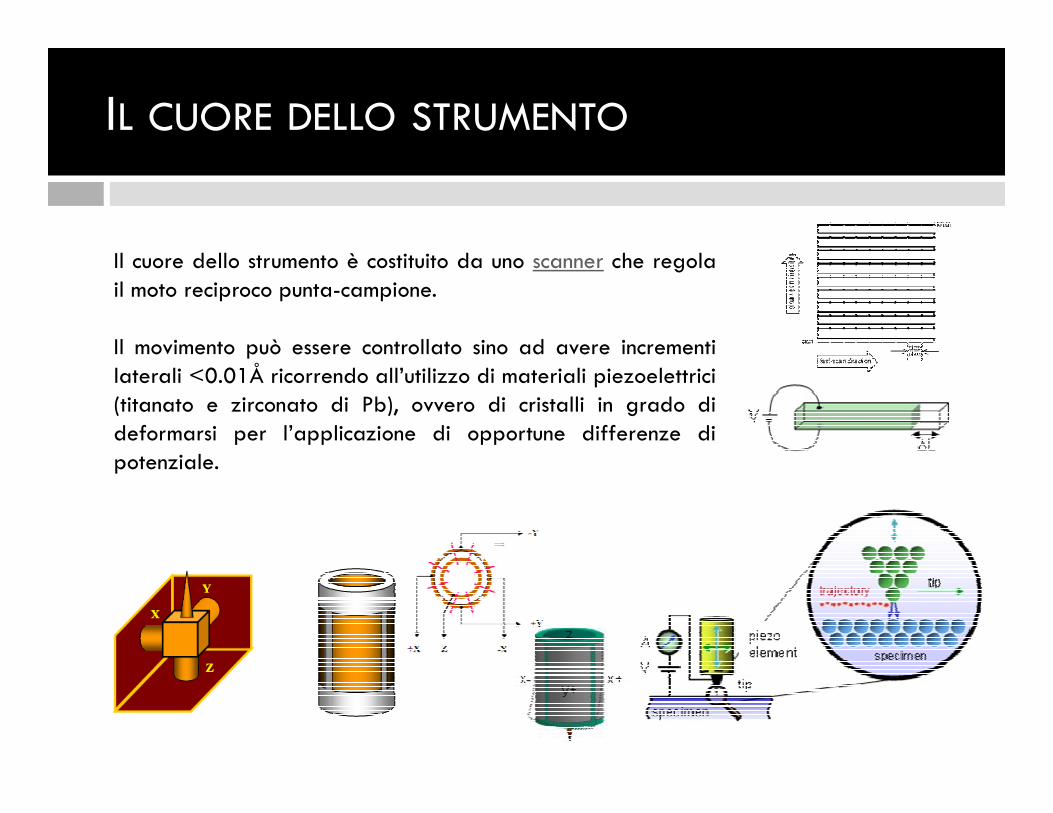
IL CUORE DELLO STRUMENTO
Il cuore dello strumento è costituito da uno scanner che regolail moto reciproco punta-campione.
Il movimento può essere controllato sino ad avere incrementilaterali <0.01Å ricorrendo all’utilizzo di materiali piezoelettrici(titanato e zirconato di Pb), ovvero di cristalli in grado di(titanato e zirconato di Pb), ovvero di cristalli in grado dideformarsi per l’applicazione di opportune differenze dipotenziale.

Dal punto di vista dell’interazione punta-campione:
� Contatto – Sonda e campione sono a distanze di pochi Å; la lororeciproca distanza varia pochissimo rispetto alle forze di interazionerepulsive (10-7N ÷10-6N).� Si hanno risoluzioni elevate.� I campioni devono avere una superficie regolare
MODALITÀ DI FUNZIONAMENTO
∂>
∂0
F
x
∂<
∂0
F
x
� I campioni devono avere una superficie regolare
� La maggiore distanza della punta dalla superficie impone l’usodi punte particolarmente sottili.
� L’azione della punta su campioni “molli” (polimeri, materiali biologici, film sottili, etc.) puòprodurre graffi e danneggiamenti.
� Non contatto – Durante la scansione non vi è contatto tra sonda e campione. Si trovano adistanze ~10Å÷100Å intervengono interazioni di tipo Van der Waals, elettrostatiche e dicapillarità (~10-12N).
� La forza d’interazione della punta con la superficie è sufficientemente piccola daconsentire la rilevazione della topografia materiali “molli” .
� Contatto intermittente – Sonda e campione si trovano a distanze variabili da pochi a ~10Å.� La probabilità di danneggiamento delle superfici per effetto di forze laterali e di attrito è
ridotta, per cui è possibile la rilevazione della topografia di materiali “molli” qualicampioni biologici.
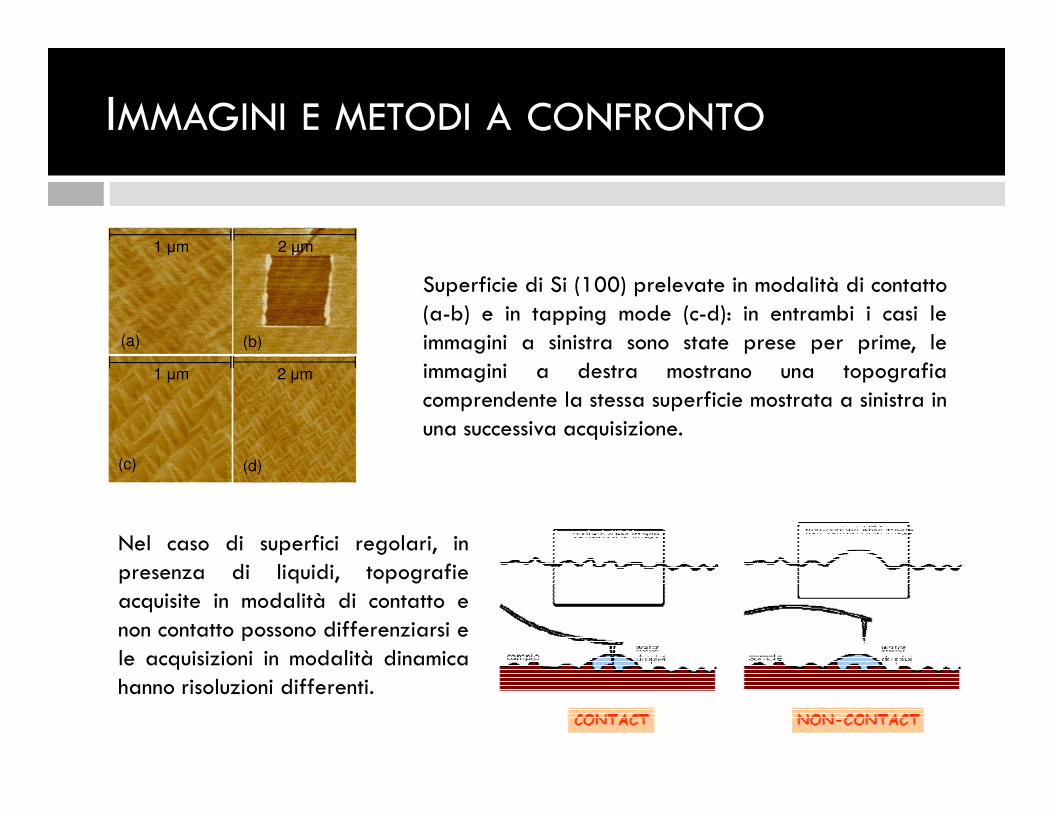
IMMAGINI E METODI A CONFRONTO
Superficie di Si (100) prelevate in modalità di contatto(a-b) e in tapping mode (c-d): in entrambi i casi leimmagini a sinistra sono state prese per prime, leimmagini a destra mostrano una topografiacomprendente la stessa superficie mostrata a sinistra in
1 µm
1 µm
2 µm
2 µm
(a) (b)
Nel caso di superfici regolari, inpresenza di liquidi, topografieacquisite in modalità di contatto enon contatto possono differenziarsi ele acquisizioni in modalità dinamicahanno risoluzioni differenti.
comprendente la stessa superficie mostrata a sinistra inuna successiva acquisizione.
(c) (d)
Dal punto di vista degli strumenti:
� Modalità statica:
Si determinano parametri che variano poco rispetto alla posizione reciproca punta-campione.
MODALITÀ DI FUNZIONAMENTO
� Ad altezza costante
� A forza costante e con rilevamento di forze laterali
� Modalità dinamica
La microleva viene fatta oscillare e si determinano parametri dinamici quali ampiezza, fase, variazione di frequenza.
� A modulazione di ampiezza (tapping mode) e con rilevamento di variazioni di fase
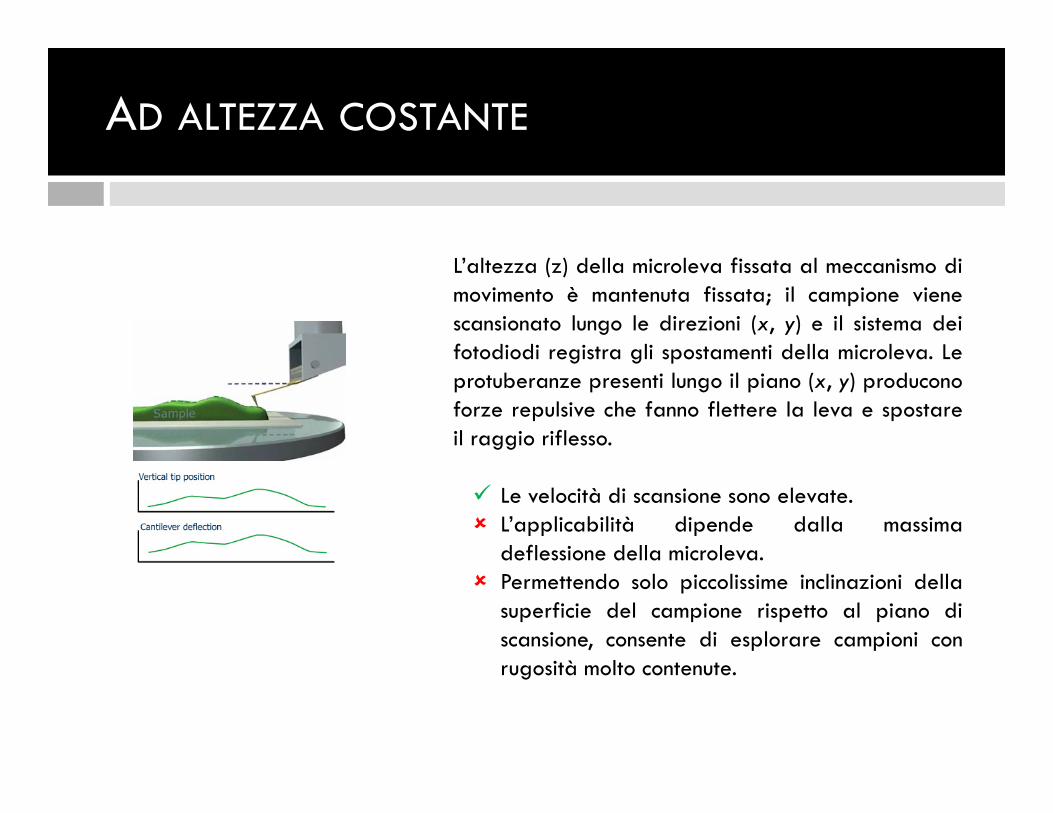
AD ALTEZZA COSTANTE
L’altezza (z) della microleva fissata al meccanismo dimovimento è mantenuta fissata; il campione vienescansionato lungo le direzioni (x, y) e il sistema deifotodiodi registra gli spostamenti della microleva. Leprotuberanze presenti lungo il piano (x, y) produconoforze repulsive che fanno flettere la leva e spostareforze repulsive che fanno flettere la leva e spostareil raggio riflesso.
� Le velocità di scansione sono elevate.� L’applicabilità dipende dalla massima
deflessione della microleva.� Permettendo solo piccolissime inclinazioni della
superficie del campione rispetto al piano discansione, consente di esplorare campioni conrugosità molto contenute.

AD ALTEZZA COSTANTE
Tellururo di Molibdeno(MoTe2)

A FORZA COSTANTE E CON FORZE LATERALI
Un circuito di retroazione utilizza il segnale relativo allavariazione di altezza (z) per mantenere costante ladeflessione della microleva e dunque la risultante delleforze agenti su di essa.
� Non essendoci la limitazione imposta dalla massimadeflessione della leva, il sistema lavora in condizionideflessione della leva, il sistema lavora in condizionidi maggiore linearità e come tale consente larilevazione di topografie più fedeli.
� La velocità di scansione è legata alla risposta delcircuito di retroazione.
Rilevando la torsione della microleva dovuta alle forzedi interazione laterali, si ottiene un segnaleproporzionale forze laterali. Su superfici irregolari, latorsione dovuta ai rilievi viene discriminata dall’attritoripetendo la scansione nel verso opposto.

A FORZA COSTANTE E CON FORZE LATERALI
Mica CD-RomFibrobalsto umanoin buffer fosfato
Film bi-componente di Langmuir Blodget: (a) topografia (b) forze laterali - attrito
Batterio pseudomonas in aria:(a) Topografiia (b) forze laterali
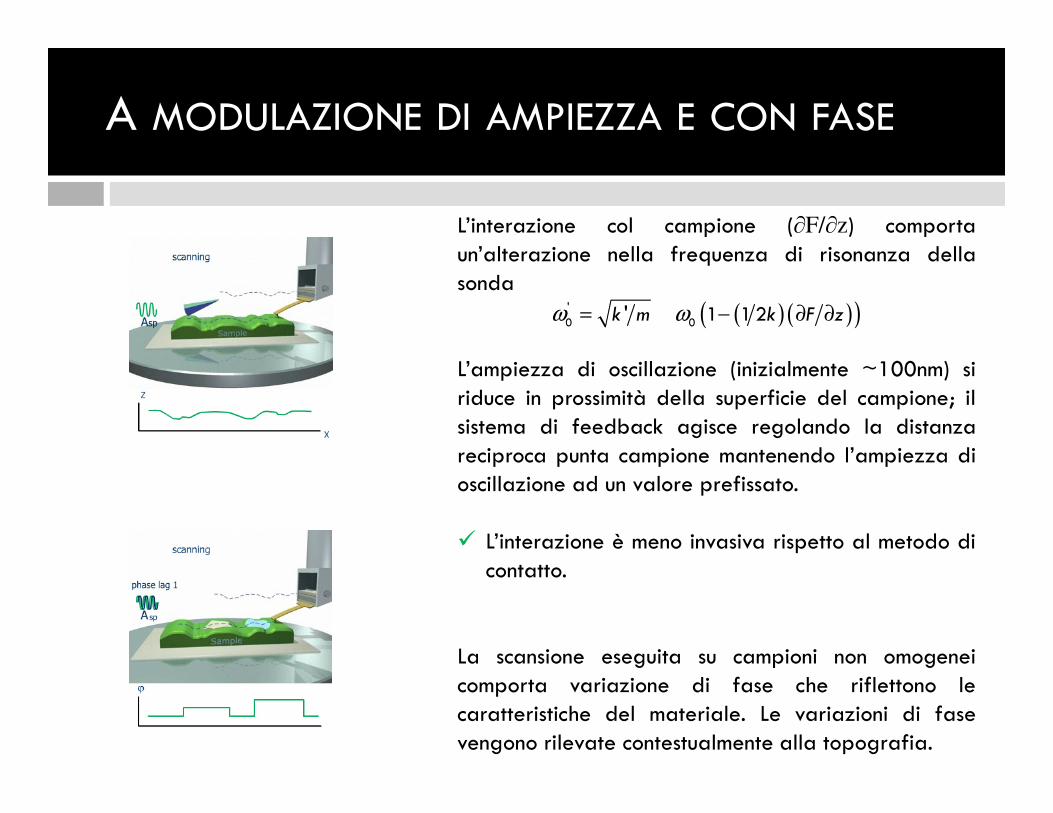
L’interazione col campione (∂F/∂z) comportaun’alterazione nella frequenza di risonanza dellasonda
L’ampiezza di oscillazione (inizialmente ~100nm) siriduce in prossimità della superficie del campione; il
A MODULAZIONE DI AMPIEZZA E CON FASE
( )( )( )'0 0' 1 12k m k F zω ω= − ∂ ∂�
riduce in prossimità della superficie del campione; ilsistema di feedback agisce regolando la distanzareciproca punta campione mantenendo l’ampiezza dioscillazione ad un valore prefissato.
� L’interazione è meno invasiva rispetto al metodo dicontatto.
La scansione eseguita su campioni non omogeneicomporta variazione di fase che riflettono lecaratteristiche del materiale. Le variazioni di fasevengono rilevate contestualmente alla topografia.
A MODULAZIONE DI AMPIEZZA E CON FASE
( )( )( )'0 0' 1 12k m k F zω ω= − ∂ ∂�
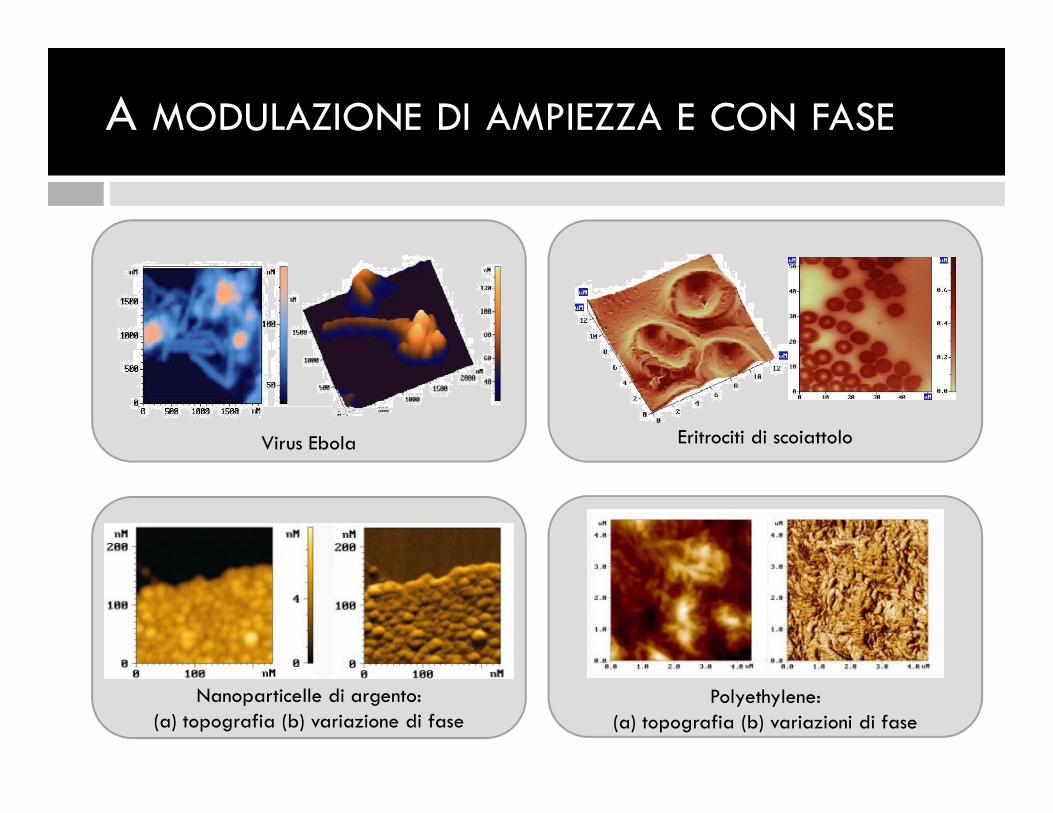
Eritrociti di scoiattolo Virus Ebola
Nanoparticelle di argento: (a) topografia (b) variazione di fase
Polyethylene:(a) topografia (b) variazioni di fase
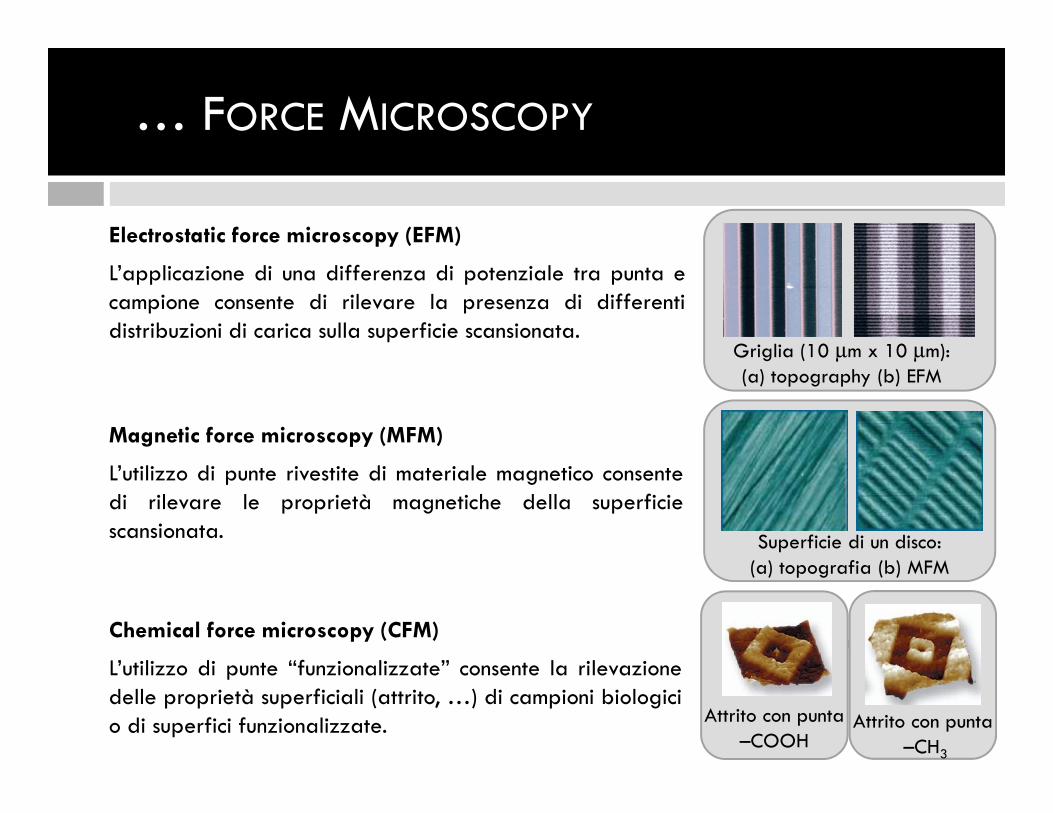
Electrostatic force microscopy (EFM)
L’applicazione di una differenza di potenziale tra punta ecampione consente di rilevare la presenza di differentidistribuzioni di carica sulla superficie scansionata.
… FORCE MICROSCOPY
Griglia (10 µm x 10 µm):(a) topography (b) EFM
Magnetic force microscopy (MFM)
L’utilizzo di punte rivestite di materiale magnetico consentedi rilevare le proprietà magnetiche della superficiescansionata.
Chemical force microscopy (CFM)
L’utilizzo di punte “funzionalizzate” consente la rilevazionedelle proprietà superficiali (attrito, …) di campioni biologicio di superfici funzionalizzate.
CH3
COOH
COOH
COOH
COOH
COOH
COOH CH3
CH3
CH3CH3
CH3
CH3COOH
Superficie di un disco:(a) topografia (b) MFM
Attrito con punta–COOH
Attrito con punta–CH3

L’adsorbimento in superficie di una massa uniformem0 comporta una variazione nella frequenza dirisonanza
AFM COME “BILANCIA”
0
0
k
mω =
espressa da
Possono essere rilevate variazioni di massa inferiorial picogrammo.
0m
2 20,2 0,1
1kmn ω ω
∆ = −

L’AFM può essere utilizzata per alterare lesuperfici mediante applicazioni dioppotune sollecitazioni: pressioni,differenze di potenziale, “inchiosti”, …
NANOLITOGRAFIA
Ossidazione anodica su TiPolicarbonato su Si
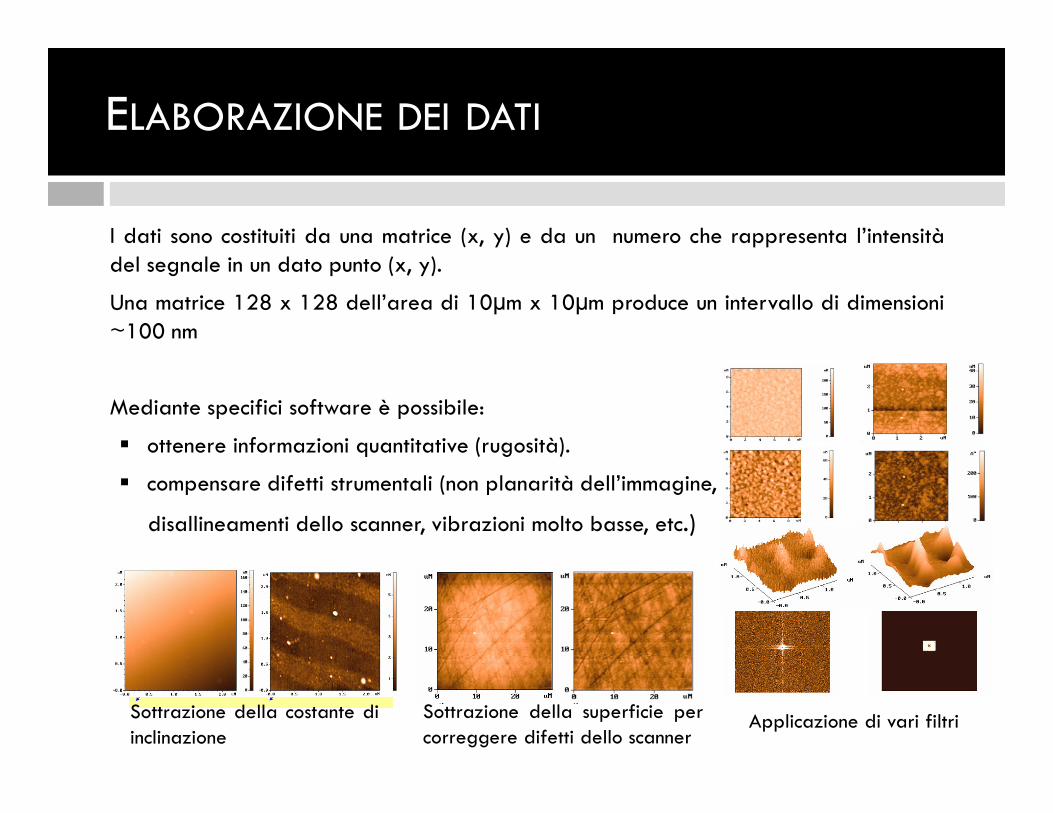
I dati sono costituiti da una matrice (x, y) e da un numero che rappresenta l’intensitàdel segnale in un dato punto (x, y).
Una matrice 128 x 128 dell’area di 10µm x 10µm produce un intervallo di dimensioni~100 nm
Mediante specifici software è possibile:
ELABORAZIONE DEI DATI
Mediante specifici software è possibile:
� ottenere informazioni quantitative (rugosità).
� compensare difetti strumentali (non planarità dell’immagine,
disallineamenti dello scanner, vibrazioni molto basse, etc.)
Sottrazione della costante diinclinazione
Sottrazione della superficie percorreggere difetti dello scanner
Applicazione di vari filtri

Punti di forza
� Produce un profilo tridimensionale reale della superficie (diversamente dal microscopioelettronico (SEM), che ne fornisce un’immagine bidimensionale)
� È una tecnica per lo più “non distruttiva” e in generale i campioni non richiedonoparticolari trattamenti speciale.
� Può essere eseguita anche in aria e in “umido” consentendo l’analisi in situ di particolari
RICAPITOLANDO
� Può essere eseguita anche in aria e in “umido” consentendo l’analisi in situ di particolariprocessi chimici.
Limiti
� L’andamento delle forze interatomiche è indipendente dalla natura degli atomiinteragenti per cui l’AFM non è sensibile alla composizione chimica della superficie.
� La scansione può essere molto lenta su aree ~100µm2 con profondità ~1µm.
� Risoluzione e qualità delle immagini dipendono dal raggio di curvatura della sonda.
� Le immagini richiedono un’opportuna elaborazione.

� V. L. Mironov – The textbook for students of the senior courses of higher educational institutions THE RUSSIAN ACADEMY OF SCIENCES INSTITUTE OF PHYSICS OF MICROSTRUCTURES – Nizhniy Novgorod, 2004
� Giacomo Torzo – SFM : Microscopia a Scansione di Forza ICTIMA (Istituto di Chimica e Tecnologie MaterialiAvanzati) – CNR e INFM (Istituto Nazionale di Fisica della Materia) Dipartimento di Fisica dell’Università diPadova INSTITUTE OF PHYSICS OF MICROSTRUCTURES
� Surfactant micelles in aqueous solution: critical resolution in AFM – NT-MTD
� SPM METHODS FOR POLYMER INVESTIGATIONS – NT-MTD
RIFERIMENTI
SPM METHODS FOR POLYMER INVESTIGATIONS – NT-MTD
� Rebecca Howland, Lisa Benatar – A PRACTICAL GUIDE TO SCANNING PROBE MICROSCOPY –ThermoMicroscopes
� Scanning Probe Microscopy Training Notebook Version 3.0 – Digital Instruments Veeco Metrology Group
� Prater, Maivald, Kjoller, Heaton – TappingMode Imaging Applications and Technology – Bruker
� Dawn Bonnell - "Scanning Probe Microscopy and Spectroscopy" - Wiley-VCH
� Dror Sarid - "Scanning Force Microscopy" - Oxford University Press
� Israelachvili J.N. – “Intermolecular and surface forces” - Academic Press
� Lang, Hegner, Gerber – Cantilevers Array Sensors – Materials Today
� http://www.nanoscience.com/education/index.html
� http://www.ntmdt.com/spm-principles/view/afm
� http://virtual.itg.uiuc.edu/training/
GRAZIE PER L’ATTENZIONEGRAZIE PER L’ATTENZIONE
Bioingegneria elettronicaA.A. 2010/2011
Related Documents











