Microprocessor Engineering Introduction 11/12

Microprocessor Engineering Introduction 11/12. Microprocessor Engineering 16-7210 Alan Holloway – contact: [email protected]@shu.ac.uk.
Dec 22, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Microprocessor Engineering
Introduction 11/12

Microprocessor Engineering 16-7210
Alan Holloway – contact: [email protected]– Room 9323 Furnival/Cantor
• Weeks 1-6– 6 × 2 Hour Lectures– 6 × 1 Hour Labs
• Weeks 7-12– 6 × 1 Hour Lectures– 6 × 2 Hour Labs

Assessment method
• 50% Coursework– formative series of lab tutorials (7.5%)– In class test on C & bit manipulation (2.5%)– major assignment (40%)
• 50 % Exam – 2 Hours duration– 4 from 6 questions
Resources
• All course information can be found on the Blackboard site or at www.aholloway.co.uk
– Lecture notes– Sample programs– Reading list– Software (available free)

Microprocessor Engineering
• Microprocessor Systems• Microcontrollers• ARM7 core Processor Family
– specifically NXP LPC2368 microcontroller– Many others are available 8051, PIC, AVR etc
• C Programming will be used throughout– ARM Realview MDK - 'C' compiler & other tools– u-Vision Integrated Development Environment
1-5
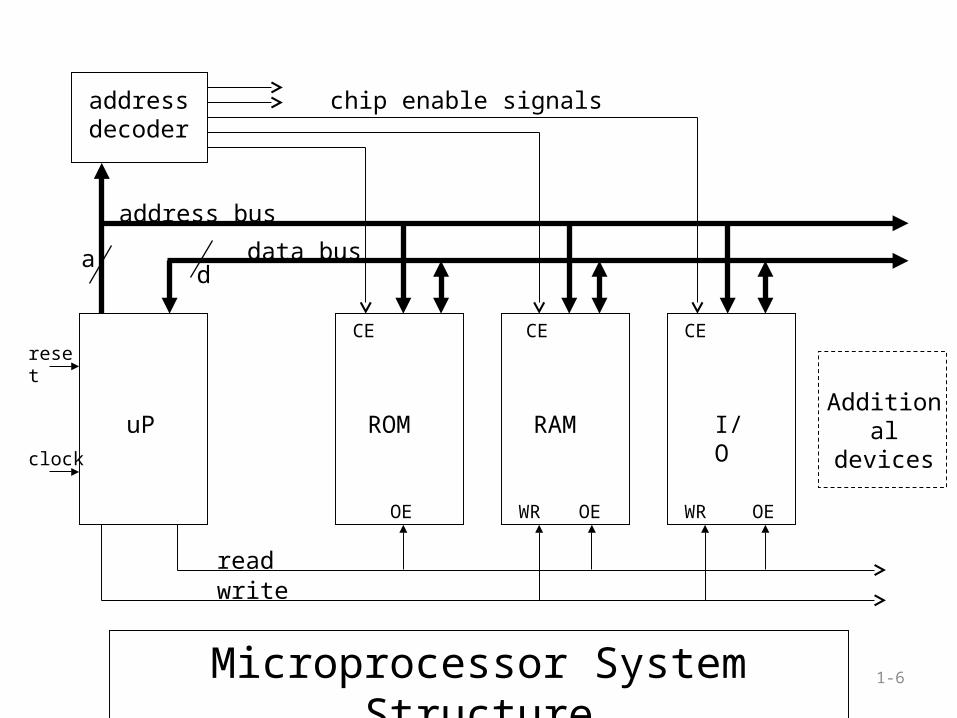
1-6
clock
address bus
data bus
chip enable signals
readwrite
uP ROM I/ORAM
CE CECE
OE WR OE OEWR
Additional devices
Microprocessor System Structure
ad
address decoder
reset

Bus operations
• Read • Write• Each read/write operation is made up of a
number of clock cycles or T states• Each machine instruction is made up of one or
more read and/or write operations• This is why we shouldn't compare
microprocessors simply based on clock speed
1-7

1-8
Address Bus• Unidirectional and generated by microprocessor• Number of address lines determines number of address
locations • Addressable locations = 2^a where a is the number of
address lines
ROM
RAM
I/O
0000H
E000H
3FFFH
E00FH
7FFFH
FFFFH
6000H
MemoryAddress
Totalmemory space
d bits
2a - 1
01
Memory Map :A memory map shows the position of devices within the whole of the addressable area
memory addresses
Data Bus
• Bi-directional• Usually matches the word length of the
microprocessor • Usually a multiple of 8 • We talk of 8-bit, 16-bit , 32-bit and 64-bit
processors which refers to the normal word length of the microprocessor
1-9
Control bus
• Consists of potentially many signals. Typically:-– Read– Write– Could be single signal - Read/notWrite line– Interrupt control– Bus control signals for DMA (Direct Memory
Access)
1-10

Microprocessr
• CPU – Central Processing Unit– ALU – Arithmetic Control Unit
• Circuit which performs arithmetic and logical operations
– Registers• Small CPU bases storage very quick
– Control Unit• Controls the flow of data through the processor, and
coordinates the activities of the other units within it
1-11
1-12
Microprocessor Registers
• General purpose registers• Accumulator – used in conjunction with ALU –
often found on 8-bit microprocessors• Status or Flag Register – indicate result of last
instruction executed• Program counter(PC) or Instruction Pointer• Stack Pointer (SP)• Special registers – Instruction and memory
address register
The Fetch – Execute cycle• Fetch
– memory read cycle– place in instruction register and decode
• Execute– may involve additional read and/or write cycles
• Often the whole Fetch-Execute cycle is carried out through a pipeline operation involving several stages.– 5 stages are often used (IF, ID, RR, EX, WB)– The Pentium 4 has 20 stages– The ARM 7 has 3 stages
1-13

Pipeline - Natural assembly line• Example
– Alan (A) Barry (B) & Chris (C) each have a load of clothes
• Washer takes 30 mins
• Dryer takes 30 mins
• Ironing takes 30 mins
A B C

Sequential - non pipelined
30 30 30 30 30 30 30 30 30
A
B
C
7pm 11.30pm
Total for 3 Loads is 4.5 Hours
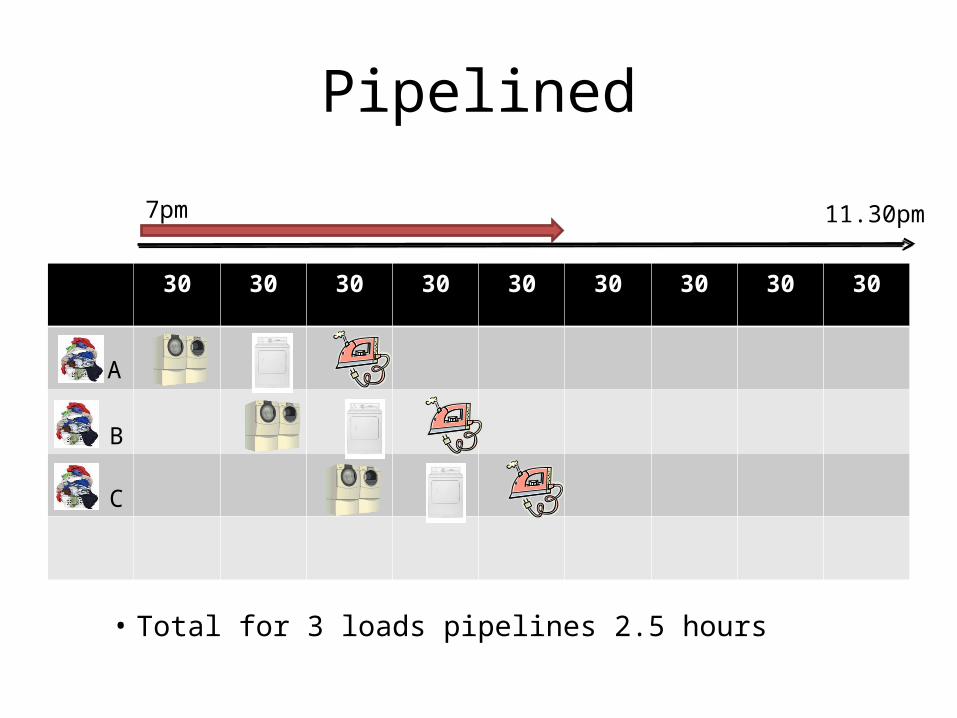
Pipelined
• Total for 3 loads pipelines 2.5 hours
30 30 30 30 30 30 30 30 30
A
B
C
7pm 11.30pm

Pipelines
• Does not speed up 1 task - increases overall throughput
• Multiple tasks operate simultaneously using separate resources
• Limited by speed of slowest resource

ARM7 Pipeline• The pipeline has hardware-independent stages that execute one
instruction while decoding a second and fetching a third. The pipeline speeds up the throughput ofCPU instructions so effectively that most ARM instructions can be executed in a single cycle.
• The pipeline works most efficiently on linear code.
1-19
CPU operation
• On reset – PC is loaded with a value, typically 0• Fetch – execute cycle
– Fetch instruction • memory read cycle using PC (program counter)• place in instruction register and decode• increment PC ready for next fetch
– Execute instruction• often involves additional read and/or write cycles to read
operands and possibly write back results• could modify PC – causes flow of program execution to
change

1-20
CPU Architecture
• Two basic types– Von Neumann
• One memory space for instructions and data• Therefore one single memory bus structure
– Harvard• Separate instruction and data spaces• Therefore separate memory buses – parallel operation
and therefore faster operation• Can have different address and data bus widths
optimised for each bus

1-21
Basic microprocessor system
• Von Neumann Architecture
Reset
Oscillator
Clock
Memory (Instructions & Data) and Input/Output
Read
Write
Address
Data
Microprocessor
Power on & manual reset
D0-dy
A0-Ax

1-22
Harvard Architecture
Program Memory
Data Memory & I/O
Read
Write
Address
Data
Microprocessor
d0-dn
Address
Read
Instruction
I0-Iw
A0-AxA0-Ay
What is an embedded system?
• An embedded system is a special-purpose computer system designed to perform one or a few dedicated functions
•Washing machine runs programs•Open water valve•Heat water•Start spin•etc etc….
•Do we need a PC running windows Vista to do this ?

Will I ever need to use one?
• Over 4 billion 8-bit microcontrollers were sold in 2006 alone
• the world's population is estimated to be about 6.756 billion
• Average car contains >50 microcontrollers• Electrical, electronic, control, robotics,
computer engineer - Yes you will
What is an Embedded Computer System• Special purpose computer – usually with one
specific task or application.• Usually embedded in a device which often
has other electronic and mechanical parts• Usually optimised for the specific task• Has the usual basic computer components –
CPU, memory, inputs & outputs
Microcontroller
• A microcontroller is the integration of – microprocessor– memory
• ROM types – commonly flash PROM• RAM – Static ram
– peripherals• parallel input and output(digital I/O)• Timers and Counters• Serial input and output (UART, USART, SPI etc.) • Analogue to digital converters• PWM, CAPCOM registers, DACs etc.etc.
1-26

Examples• consumer appliances
– tv's, mp3 players, dvd's, washing machines etc.
• automotive applications– engine management, anti-lock braking
• computer peripherals– hard disk controllers, routers, switches
• medical equipment– scanners, blood analysers
• telecoms– mobile phones
• aerospace – satellite control systems, avionics
Some Characteristics
• Very simple to very complex applications • Often single application
– but concurrent operation• Could be real-time (hard and soft)• Program is normally stored in ROM – called
firmware – flash ROM commonly• Could be critical applications • Interfacing with other devices via peripherals• Require a range of development tools –
hardware and software• May use operating system (RTOS)
Constraints
• Physical size• Weight• Power usage• Performance – throughput and/or response
time• Cost

Resulting in -
• limited space• limited processing power
– 8-bit processor• limited memory RAM & ROM
– only Ks of memory not Ms• schemes to limit power consumption
– low power modes– sleep– standby
• determinism – needed for RT guarantee

Linksys Wired & Wireless Router

Linksys WRT54GL Router & Access point• CPU – Broadcom BCM4712KPB @ 200 MHz• RAM – 16MiBytes (2 x S42S16400 RAM Chips)• ROM – 4MiBytes (Intel TE28F320 C3 Flash ROM)• I/O
– WAN port: One 10/100 RJ-45 port– LAN port: Four 10/100 RJ-45 ports– Wi-Fi Channels: 13– LED Indicators : power, DMZ, WLAN, port 1/2/3/4,
Internet
Microprocessor vs Microcontroller vs Soc vs FPGA
• uP – General purpose– external memory and peripherals– connected by a memory bus
• uC– uP integrated with memory and peripheral
interfaces– families of uC all with same uP but varying
amounts and types of memory and interfaces.
1-34
Microcontroller (µC) vs. Microprocessor (µP)• µC intended as a single chip solution, µP requires
external support chips (memory, peripheral interfaces etc.)
• µC has on-chip non-volatile memory for program storage, µP does not.
• µC has more interface functions on-chip (serial interfaces,Analog-to-Digital conversion, timers, etc.) than µP
• General purpose µPs are typically higher performance (clock speed, data width, instruction set, cache) than µCs
• However the division between some µPs and some µCs becoming increasingly blurred.
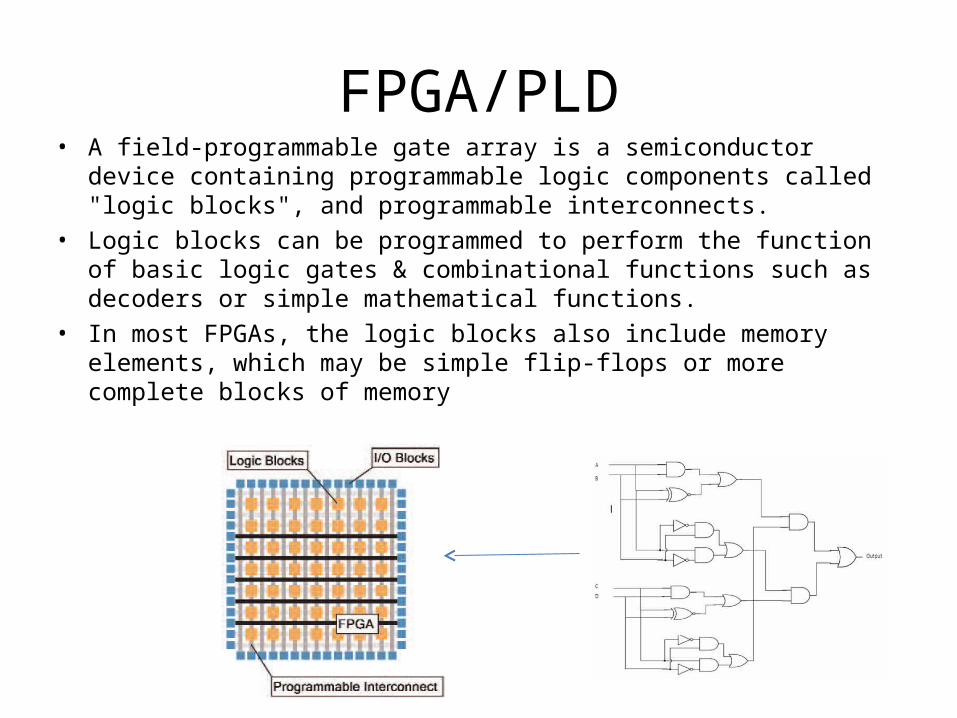
FPGA/PLD• A field-programmable gate array is a semiconductor device containing
programmable logic components called "logic blocks", and programmable interconnects.
• Logic blocks can be programmed to perform the function of basic logic gates & combinational functions such as decoders or simple mathematical functions.
• In most FPGAs, the logic blocks also include memory elements, which may be simple flip-flops or more complete blocks of memory
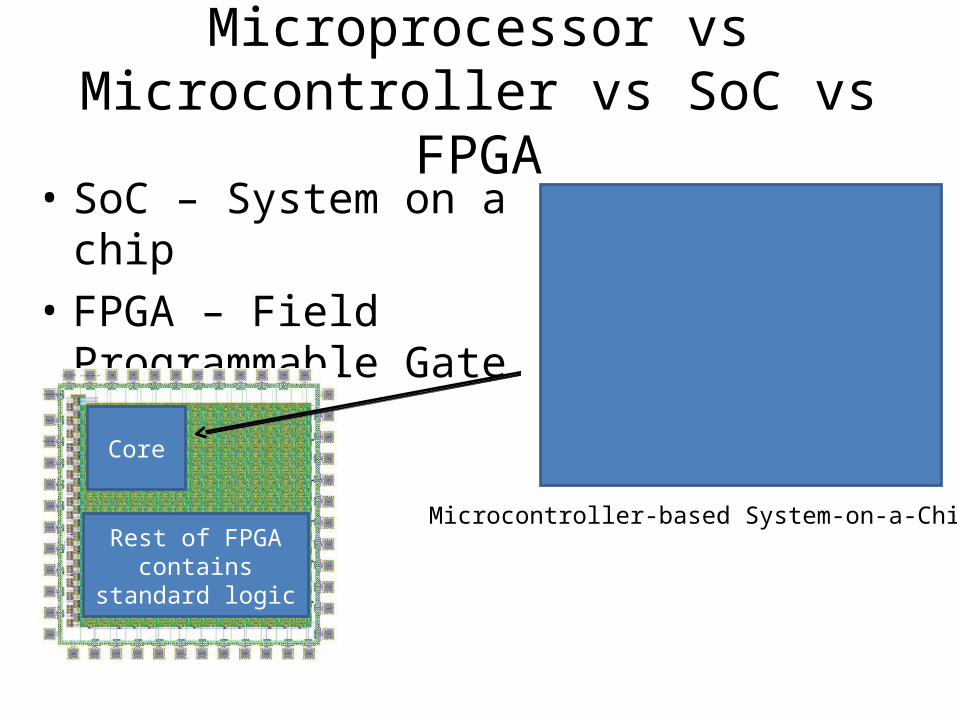
Microprocessor vs Microcontroller vs SoC vs FPGA
• SoC – System on a chip• FPGA – Field
Programmable Gate Array
Microcontroller-based System-on-a-Chip
Core
Rest of FPGA contains standard
logic
Related Documents











