MEGN 536 Computational Biomechanics Rotations for Rigid Body Kinematics Prof. Anthony Petrella

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

MEGN 536Computational Biomechanics
Rotations for Rigid Body Kinematics
Prof. Anthony Petrella
Knee (or any joint) Biomechanics
You are all MATLAB ninja or sous-ninja now
So, let’s start thinking about knee biomechanics…
Joint motion (kinematics) and forces (kinetics) are the foundation for defining design requirements
How do we express these quantities?
Let’s consider an example…
Introducing Abaqus Knee Simulator (AKS)
AKS has automation to help designer… Test knee implant laxity Test knee implant contact mechanics Test knee implant wear performance
To run it… Create a working folder in C:\scratch Right click in folder and “open command prompt here” At command prompt… >> abaqus kneeapp

Run Abaqus Knee Model
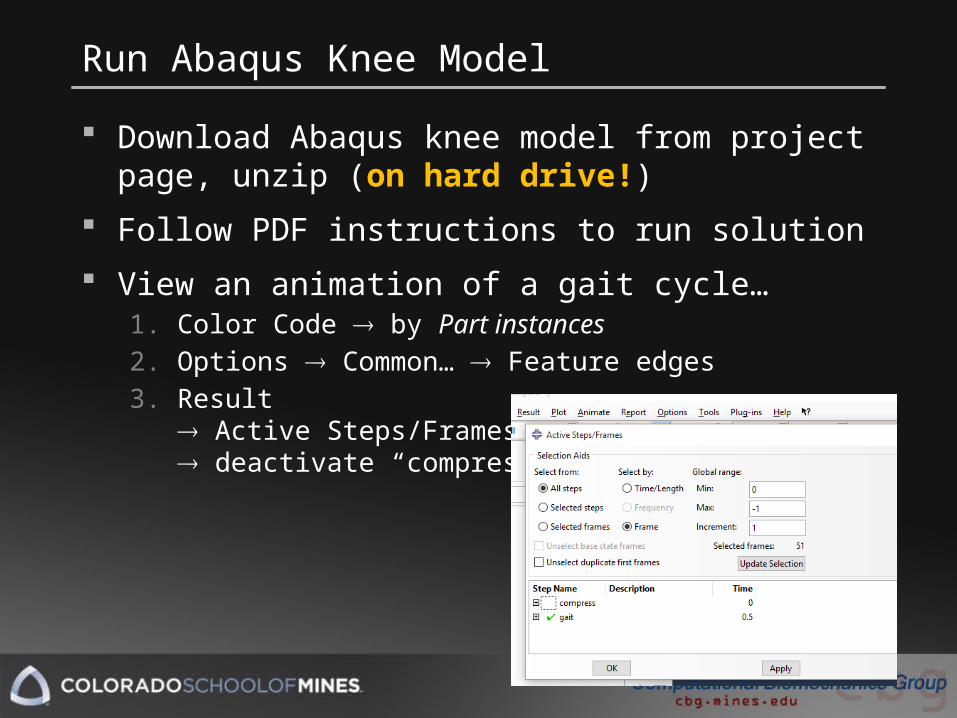
Download Abaqus knee model from project page, unzip (on hard drive!)
Follow PDF instructions to run solution
View an animation of a gait cycle…1. Color Code by Part instances

Run Abaqus Knee Model
Download Abaqus knee model from project page, unzip (on hard drive!)
Follow PDF instructions to run solution
View an animation of a gait cycle…1. Color Code by Part instances
2. Options Common… Feature edges
Run Abaqus Knee Model
Download Abaqus knee model from project page, unzip (on hard drive!)
Follow PDF instructions to run solution
View an animation of a gait cycle…1. Color Code by Part instances
2. Options Common… Feature edges
3. Result Active Steps/Frames… deactivate “compress”

Run Abaqus Knee Model
Download Abaqus knee model from project page, unzip (on hard drive!)
Follow PDF instructions to run solution
View an animation of a gait cycle…1. Color Code by Part instances
2. Options Common… Feature edges
3. Result Active Steps/Frames… deactivate “compress”
4. Options Animation… make Frame Rate about 75%

Run Abaqus Knee Model
Download Abaqus knee model from project page, unzip (on hard drive!)
Follow PDF instructions to run solution
View an animation of a gait cycle…1. Color Code by Part instances
2. Options Common… Feature edges
3. Result Active Steps/Frames… deactivate “compress”
4. Options Animation… make Frame Rate about 75%
5. Use Ctrl+Alt+Left mouse to rotate view
6. Animate Time History
Question: What’s the best way to express 6 DOF kinematics and forces for this knee?
Rigid Body Motion
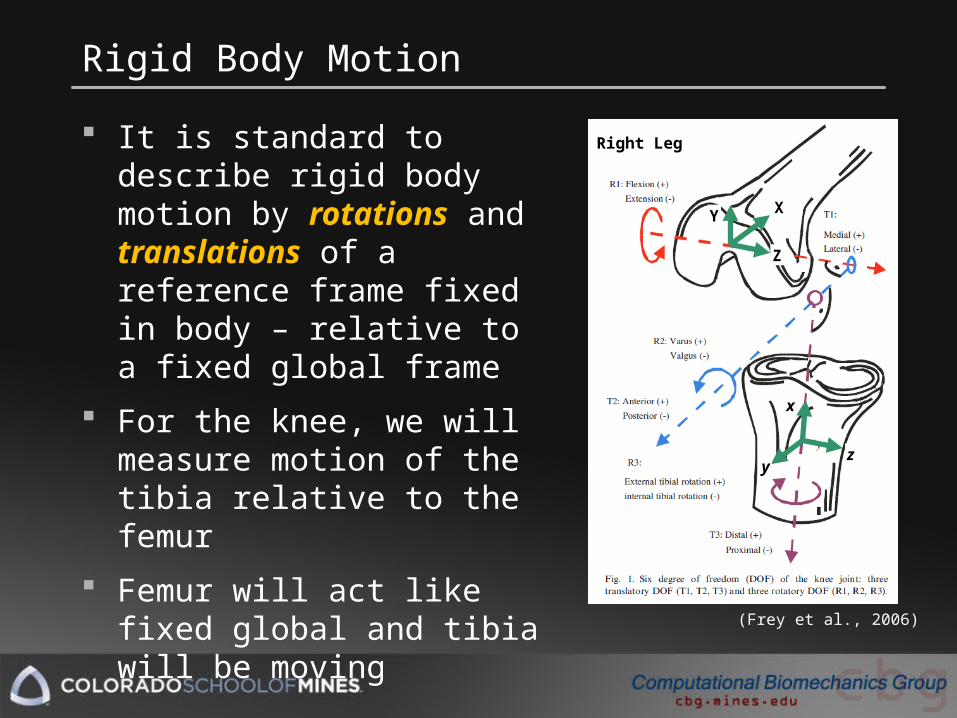
It is standard to describe rigid body motion by rotations and translations of a reference frame fixed in body – relative to a fixed global frame
For the knee, we will measure motion of the tibia relative to the femur
Femur will act like fixed global and tibia will be moving
(Frey et al., 2006)
Right Leg
X
Z
Y
zy
x

Rigid Body Rotations
We will begin to consider rigid body motion with rotations only (translations are easy)
We’ll define the global fixed frame with capital letters and the moving local frame with lowercase letters

Rigid Body Motion

Rigid Body Motion
Collecting the three dot products into a single expression gives…
Rotation matrix Rz is called an “orthonormal” rotation matrix because the rows are orthogonal unit vectors
Notice the rows of Rz are the unit vectors defining the local frame L
Rz also has theproperty…

Rigid Body Motion

Rigid Body Motion
Related Documents











