MEE 3025 MECHANISMS WEEK 3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
MEE 3025 MECHANISMS
WEEK 3
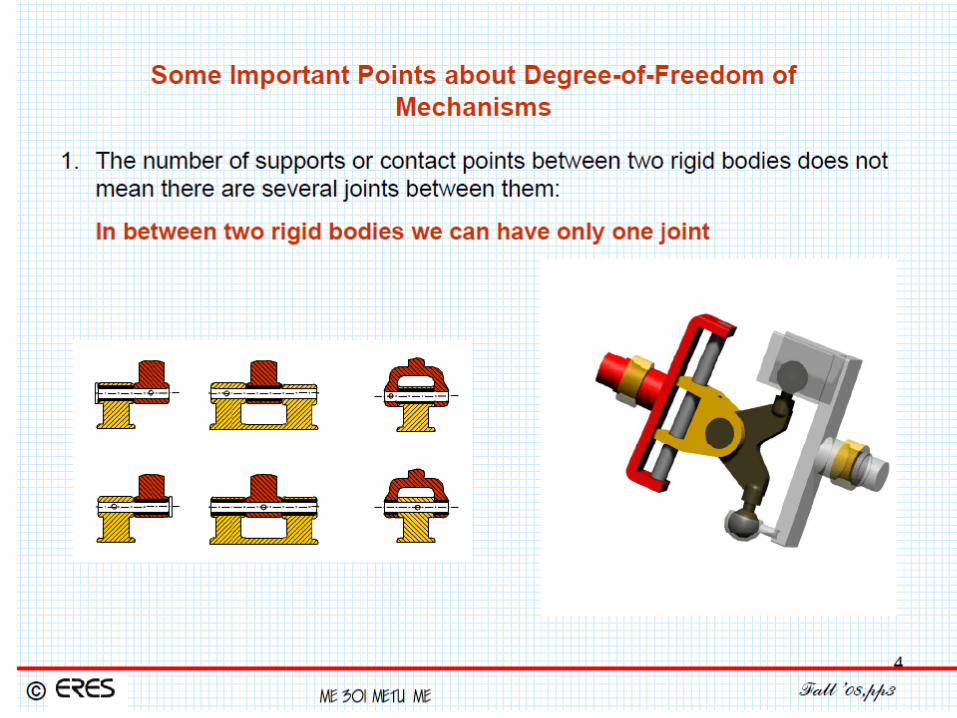

2. Roller in a Cam Mechanism
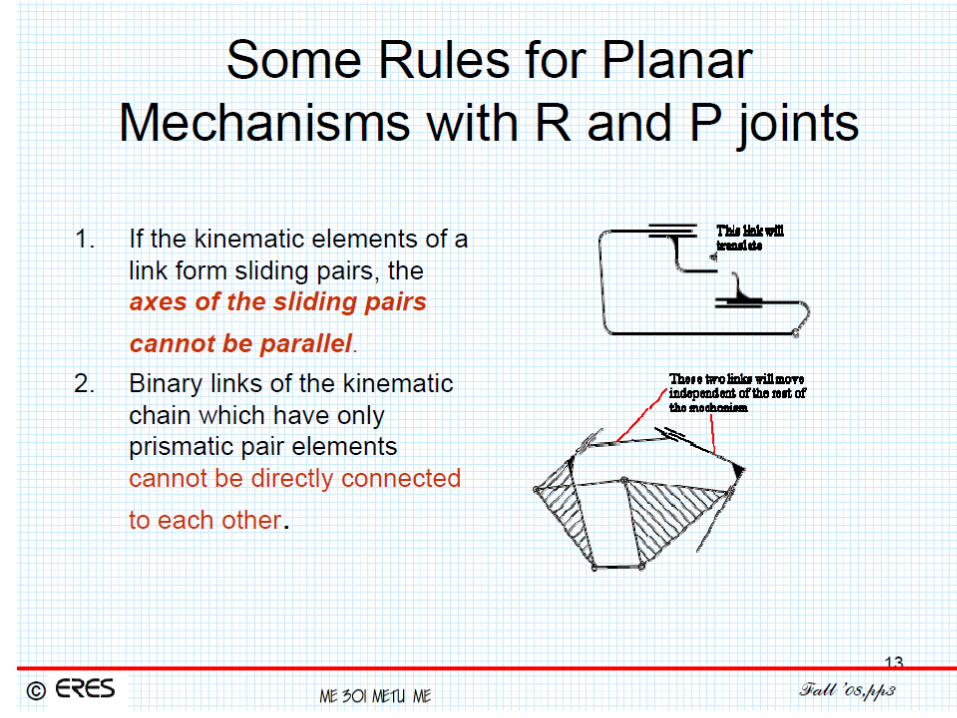
The purpose of the roller is to reduce the sliding friction between the surfaces and from the viewpoint of kinematics it can be eliminated. The DOF should be determined from an equivalent chain in which roller follower is replaced by a knife edge follower.

3. Mechanisms with Critical Form
• Permanent Critical Form: Through –out the whole phase of the motion
• e.g. Parallelogram Mechanisms
• The DOF doesn’t, in general depend on link dimensions. However mechanisms with critical form are exceptions.
• Parallelogram mechanisms may make motion whereas GDOF eq’n gives: F= 3(6-8-1)+8=-1.
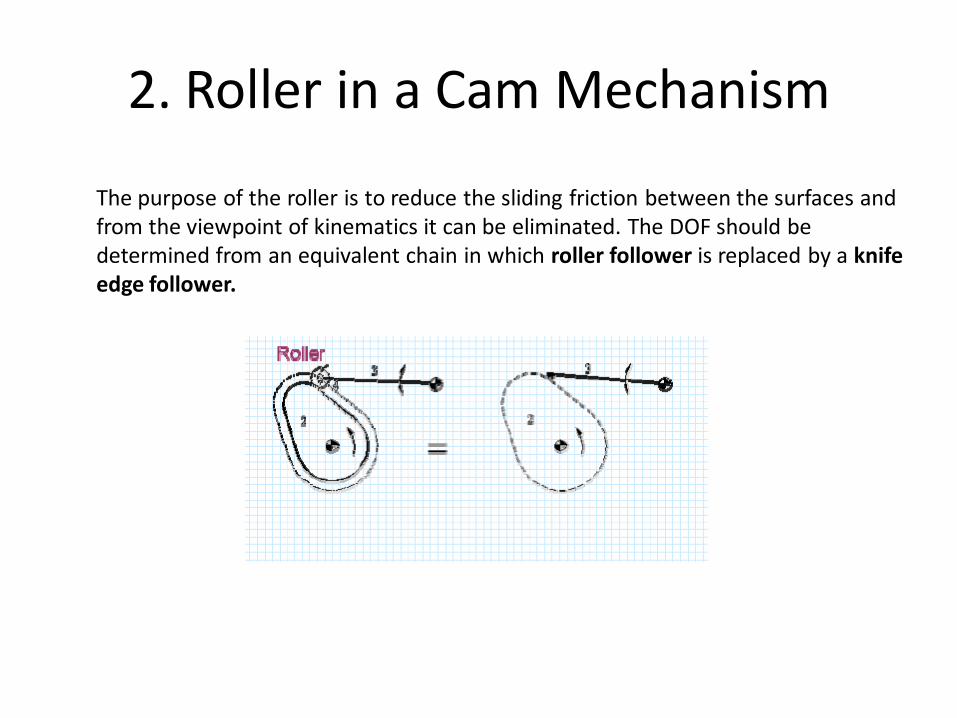
3. Mechanisms with Critical Form (cont’d)
• Instantaneous Critical Form: Movability is within an infinitesimal displacement, due to the dimensions of the links. (Used for moving loads within a small distance.)

4.

Constrained-Unconstrained Mechanisms
• Constrained Mechanisms:
• 1) Mechanisms in which F=1.
• 2) Mechanisms in which F1.
No of inputs (no of independendent parameters)=F
e.g.
Four bar mechanism with no of input=F=1,
Five bar mechanism with no of input=F=2 .
Constrained-Unconstrained Mechanisms (cont’d)
• Unconstrained Mechanisms:
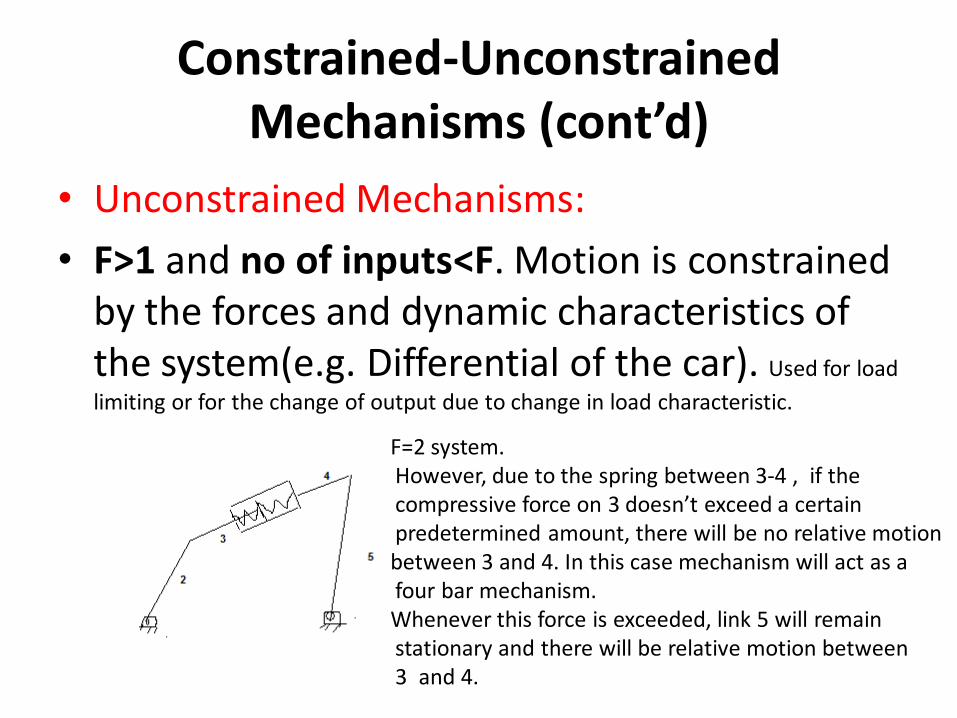
• F>1 and no of inputs<F. Motion is constrained by the forces and dynamic characteristics of the system(e.g. Differential of the car). Used for load
limiting or for the change of output due to change in load characteristic.
F=2 system. However, due to the spring between 3-4 , if the compressive force on 3 doesn’t exceed a certain predetermined amount, there will be no relative motion between 3 and 4. In this case mechanism will act as a four bar mechanism. Whenever this force is exceeded, link 5 will remain stationary and there will be relative motion between 3 and 4.
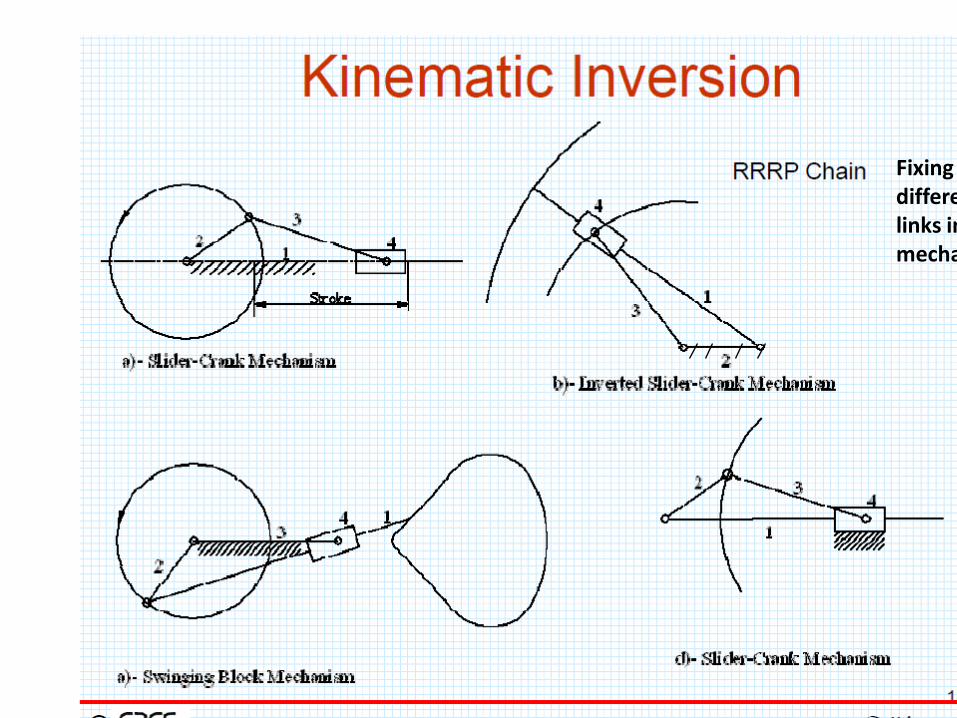
Fixing of differentlinks in a mechanism
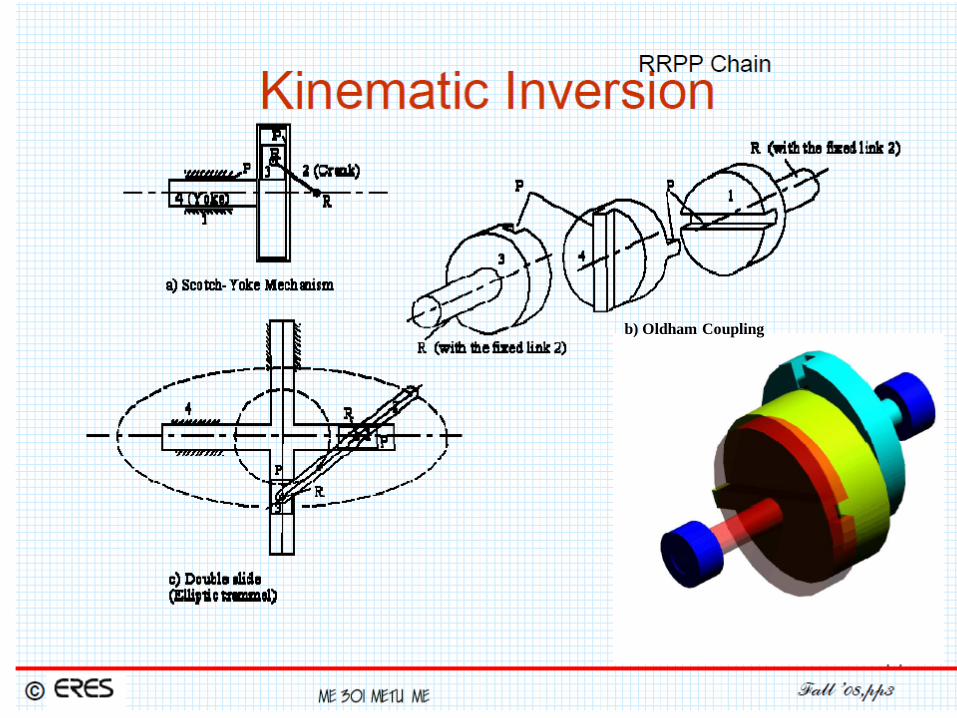
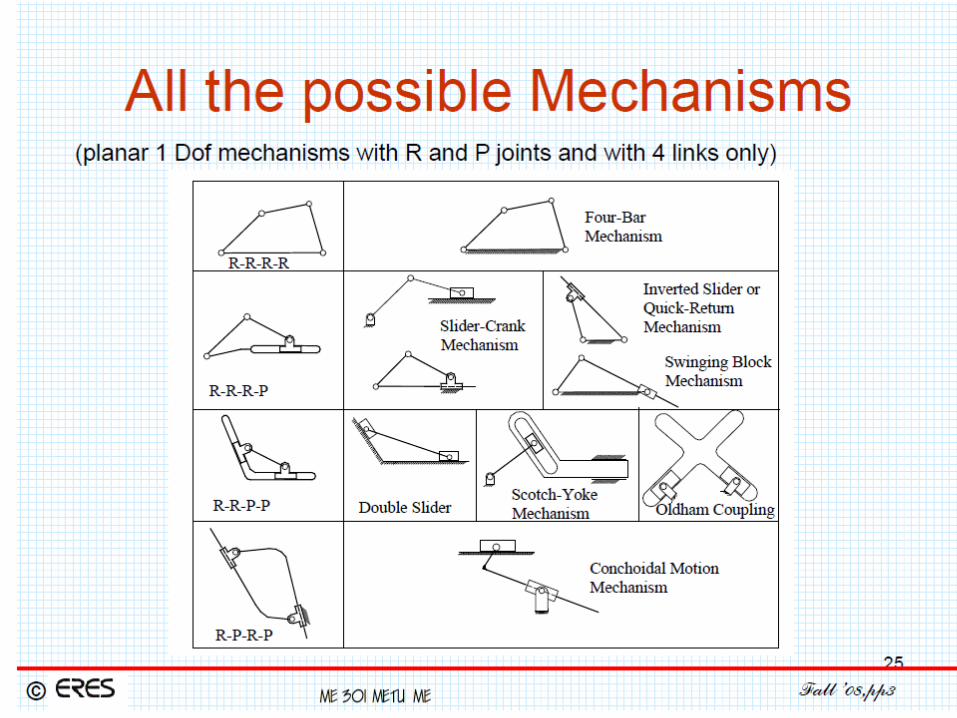
b) Oldham Coupling

or equal to

1st kinematic transformation of Watt’s chain
2nd kinematic transformation of Watt’s chain

A mechanism link can be of any shape
Classification of Mechanisms
• Reuleaux classification:
• 1. Screw mechanisms
• 2. Wheel mechanisms (gears or roller mechanisms)
• 3. Cam mechanisms
• 4. Crank mechanisms (also called linkages or link mechanisms)
• 5. Belt mechanisms
• 6. Ratchet and lock mechanisms (including Geneva drives)
Other Classifications
• According to;
• 1. Degree-of-freedom of the space
• 2. Degree-of-freedom
• 3. Number of links
• 4. Type of joints
of the mechanism.
Equivalent Linkages
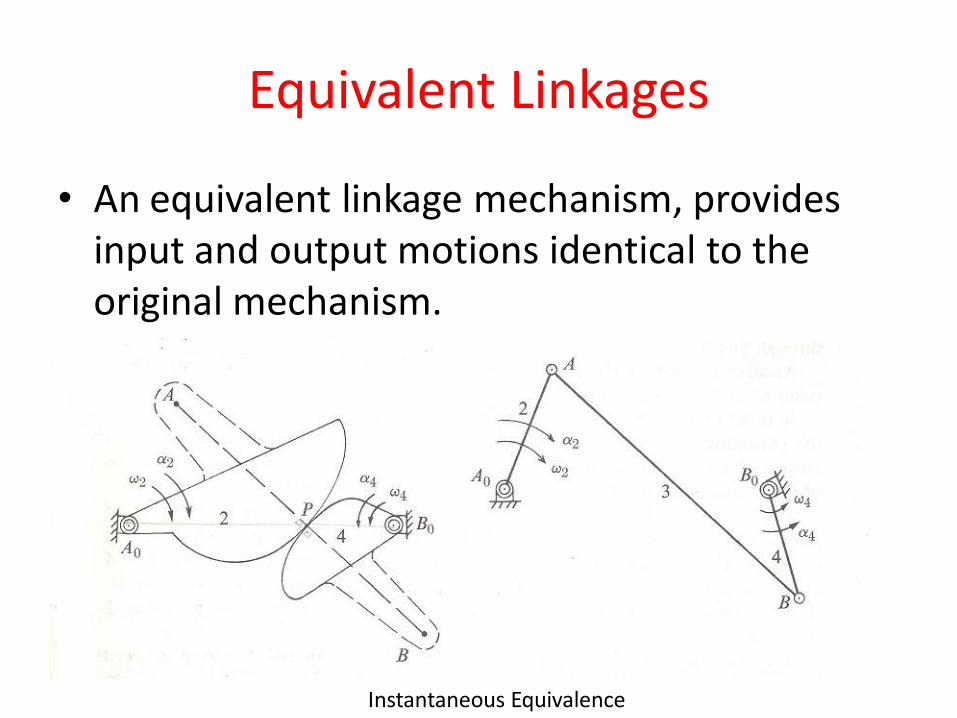
• An equivalent linkage mechanism, provides input and output motions identical to the original mechanism.
Instantaneous Equivalence

Equivalent Linkages (cont’d)
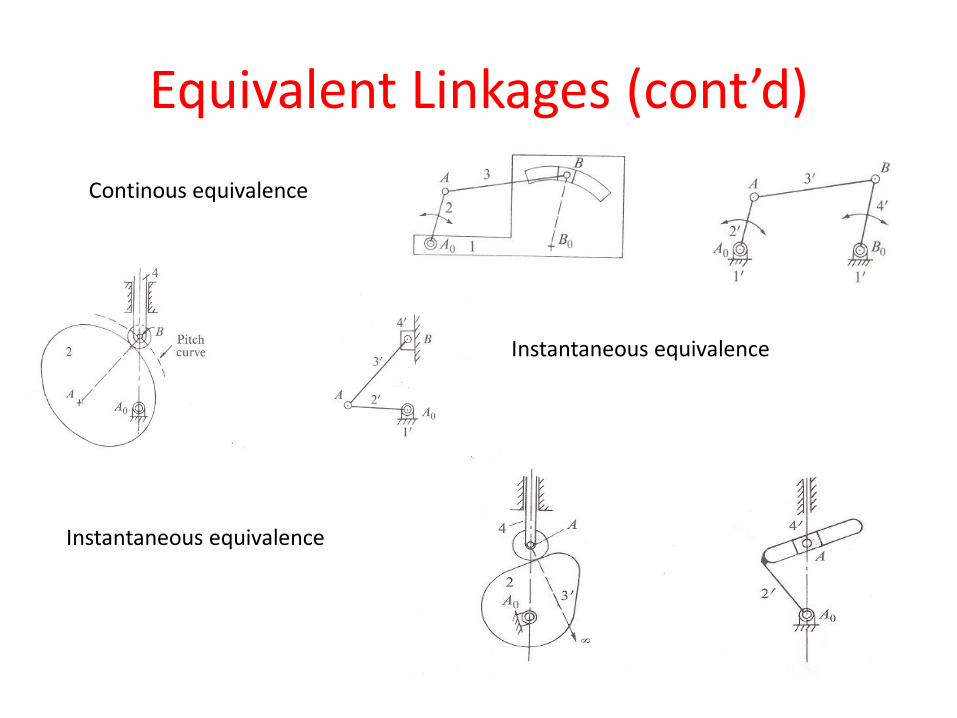
• A) Instantaneous Equivalence: Different equivalent mechanisms are obtained at different instances of the motion.
• B) Continous Equivalence: The same equivalent mechanism is obtained throughout the motion.
Continous equivalence
Equivalent Linkages (cont’d)
Continous equivalence
Instantaneous equivalence
Instantaneous equivalence
Related Documents











