Medium Access Control with Mobility-Adaptive Mechanisms for Wireless Sensor Networks Muneeb Ali and Zartash Afzal Uzmi Computer Science Department, Lahore University of Management Sciences, Lahore, Pakistan Abstract: Mobility in wireless sensor networks poses unique challenges to the medium access control (MAC) protocol design. Previous MAC protocols for sensor networks assume static sensor nodes and focus on energy-efficiency. In this paper, we present MMAC, a mobility-adaptive, collision-free medium access control protocol for mobile sensor networks. MMAC caters for both weak mobility (e.g., topology changes, node joins, and node failures) and strong mobility (e.g., concurrent node joins and failures, and physical mobility of nodes). When using MMAC, nodes are allowed to transmit at particular time-slots, based on the traffic information and mobility pattern of the nodes. Allowing transmission at particular time-slots makes MMAC a scheduling-based protocol, thereby guaranteeing collision avoidance. Simulation results indicate that the performance of MMAC is equivalent to that of TRAMA [1] in static sensor network environments. In sensor networks with mobile nodes or high network dynamics, MMAC outperforms existing MAC protocols, including TRAMA and S-MAC [2], in terms of energy-efficiency, delay, and packet delivery. Keywords: wireless sensor networks; mobility adaptive; energy efficiency. Reference to this paper should be made as follows: Ali, M. and Uzmi, Z. (2005) ‘Medium Access Control with Mobility-Adaptive Mechanisms for Wireless Sensor Net- works’, To appear in Journal of Sensor Networks, 2006. Biographical notes: Muneeb Ali received his BS in Computer Science from Lahore University of Management Sciences (LUMS) and joined the Communications and Net- working Laboratory at the same university, where he carried out research in the sensor networks area. He is currently visiting Computer and Network Architecture (CNA) Lab as a researcher at SICS Research Center, Sweden. Zartash Afzal Uzmi received his Masters and Ph.D. degrees in Electrical Engineering from Stanford University in 1996 and 2002, respectively. He is an Associate Professor of Computer Science and Engineering at Lahore University of Management Sciences (LUMS). His current research interests are in traffic engineering, routing and MAC protocols for wired and wireless networks. He has developed analytical and simulation models for restoration routing in core and wide area networks. Previously, he has held positions at Nokia Research Center, Bell Laboratories and Hewlett-Packard Company. 1 INTRODUCTION Wireless sensor networks have emerged as one of the first real applications of ubiquitous computing. Sensor net- works play a key role in bridging the gap between the physical and the computational world by providing reli- able, scalable, fault tolerant, and accurate monitoring of physical phenomena. Sensor network environments, inher- ently different from the Internet, pose some unique chal- lenges to systems researchers. Energy efficiency has been considered as the single most important design challenge in sensor networks [3]. Hence, the recent work on medium access control (MAC) protocol for sensor networks focused on energy efficiency instead of, traditional wireless MAC design goals such as fairness, delay, and bandwidth utiliza- tion [4]. Designing a MAC protocol that gives consideration to “mobility” has been well identified as an open research challenge in sensor networks for quite some time [3] and yet even the most recent MAC protocols appearing in the

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Medium Access Control withMobility-AdaptiveMechanisms for WirelessSensor Networks
Muneeb Ali and Zartash Afzal UzmiComputer Science Department,Lahore University of Management Sciences, Lahore, Pakistan
Abstract: Mobility in wireless sensor networks poses unique challenges to the mediumaccess control (MAC) protocol design. Previous MAC protocols for sensor networksassume static sensor nodes and focus on energy-efficiency. In this paper, we presentMMAC, a mobility-adaptive, collision-free medium access control protocol for mobilesensor networks. MMAC caters for both weak mobility (e.g., topology changes, nodejoins, and node failures) and strong mobility (e.g., concurrent node joins and failures,and physical mobility of nodes). When using MMAC, nodes are allowed to transmitat particular time-slots, based on the traffic information and mobility pattern of thenodes. Allowing transmission at particular time-slots makes MMAC a scheduling-basedprotocol, thereby guaranteeing collision avoidance. Simulation results indicate that theperformance of MMAC is equivalent to that of TRAMA [1] in static sensor networkenvironments. In sensor networks with mobile nodes or high network dynamics, MMACoutperforms existing MAC protocols, including TRAMA and S-MAC [2], in terms ofenergy-efficiency, delay, and packet delivery.
Keywords: wireless sensor networks; mobility adaptive; energy efficiency.
Reference to this paper should be made as follows: Ali, M. and Uzmi, Z. (2005)‘Medium Access Control with Mobility-Adaptive Mechanisms for Wireless Sensor Net-works’, To appear in Journal of Sensor Networks, 2006.
Biographical notes: Muneeb Ali received his BS in Computer Science from LahoreUniversity of Management Sciences (LUMS) and joined the Communications and Net-working Laboratory at the same university, where he carried out research in the sensornetworks area. He is currently visiting Computer and Network Architecture (CNA)Lab as a researcher at SICS Research Center, Sweden.
Zartash Afzal Uzmi received his Masters and Ph.D. degrees in Electrical Engineeringfrom Stanford University in 1996 and 2002, respectively. He is an Associate Professorof Computer Science and Engineering at Lahore University of Management Sciences(LUMS). His current research interests are in traffic engineering, routing and MACprotocols for wired and wireless networks. He has developed analytical and simulationmodels for restoration routing in core and wide area networks. Previously, he has heldpositions at Nokia Research Center, Bell Laboratories and Hewlett-Packard Company.
1 INTRODUCTION
Wireless sensor networks have emerged as one of the firstreal applications of ubiquitous computing. Sensor net-works play a key role in bridging the gap between thephysical and the computational world by providing reli-able, scalable, fault tolerant, and accurate monitoring ofphysical phenomena. Sensor network environments, inher-ently different from the Internet, pose some unique chal-lenges to systems researchers. Energy efficiency has been
considered as the single most important design challengein sensor networks [3]. Hence, the recent work on mediumaccess control (MAC) protocol for sensor networks focusedon energy efficiency instead of, traditional wireless MACdesign goals such as fairness, delay, and bandwidth utiliza-tion [4].
Designing a MAC protocol that gives consideration to“mobility” has been well identified as an open researchchallenge in sensor networks for quite some time [3] andyet even the most recent MAC protocols appearing in the
1
literature, such as ZMAC [5], do not explicitly consider mo-bility at the MAC-layer. In fact, to the best of our knowl-edge, we are not familiar with any other work that con-siders the effects of mobility at the MAC-layer (see a veryrecent survey of MAC protocols [6]). The research commu-nity has not considered mobility at the MAC-layer becausesensor networks were originally assumed to be comprised ofstatic nodes but recent works [7, 8, 9] have enabled mobil-ity in sensor network environments. Furthermore, recentapplications of sensor networks in medical health care andemergency disaster-relief [10, 11] require MAC protocolsthat can adapt to mobility. This is because the assumptionof static sensor nodes, generally made in sensor networksresearch, is no longer valid in such environments.
In this paper, we show that the current MAC protocolsfor wireless sensor networks are not suited for mobile sensornetwork environments. We present a mobility-adaptive,collision-free medium access control (MMAC) protocol forsensor networks. MMAC follows the design principles ofTRAMA [1]–a scheduling-based MAC protocol for staticmulti-hop wireless sensor networks.
In mobile environments the fixed frame time of currentMAC protocols causes performance degradation in a num-ber of ways: a) the mobile nodes, upon joining a new neigh-borhood, need to wait for a long time before they cansend data, b) in contention-based MAC protocols, thereis a considerable increase in packet collisions, and c) inschedule-based MAC protocols, the two-hop neighborhoodinformation at each node remains inconsistent for a longperiod which could effect the correctness of the protocol.A dynamic frame time, that is inversely proportional tolevel of mobility, is required to cope with these problems.
MMAC introduces a mobility-adaptive frame time thatenables the protocol to dynamically adapt to changes inmobility patterns, making it suitable for sensor environ-ments with both high and low mobility. MMAC assumesthat the sensor nodes are aware of their location. Thislocation information is used to predict the mobility pat-tern of the nodes according to the AR-1 [12, 13] model.We present a novel mobility-adaptive distributed algorithmthat dynamically adjusts the MAC frame time accordingto mobility. Experimental results indicate that the per-formance of MMAC is equivalent to that of TRAMA [1]in static sensor network environments. In sensor networkswith mobile nodes or high network dynamics, MMAC out-performs existing MAC protocols, including TRAMA andS-MAC, in terms of energy-efficiency, delay, and packetdelivery.
MMAC uses a distributed contention based algorithmthat imparts transmission rights to nodes at particulartime-slots based on the traffic information and mobilitypattern of the nodes. MMAC caters for both weak mobility(regular topology changes and node joins or failures exhib-ited by static sensor networks, and slow physical mobilityof nodes) and strong mobility (frequent topology changes,concurrent node joins or failures, and fast physical mobilityof nodes).
The rest of the paper is organized as follows. We discuss
S-MAC
T-MAC
sleep
sleep
active
active
sleep
sleep
active
active
constant active time
traffic-adaptive dynamic active time
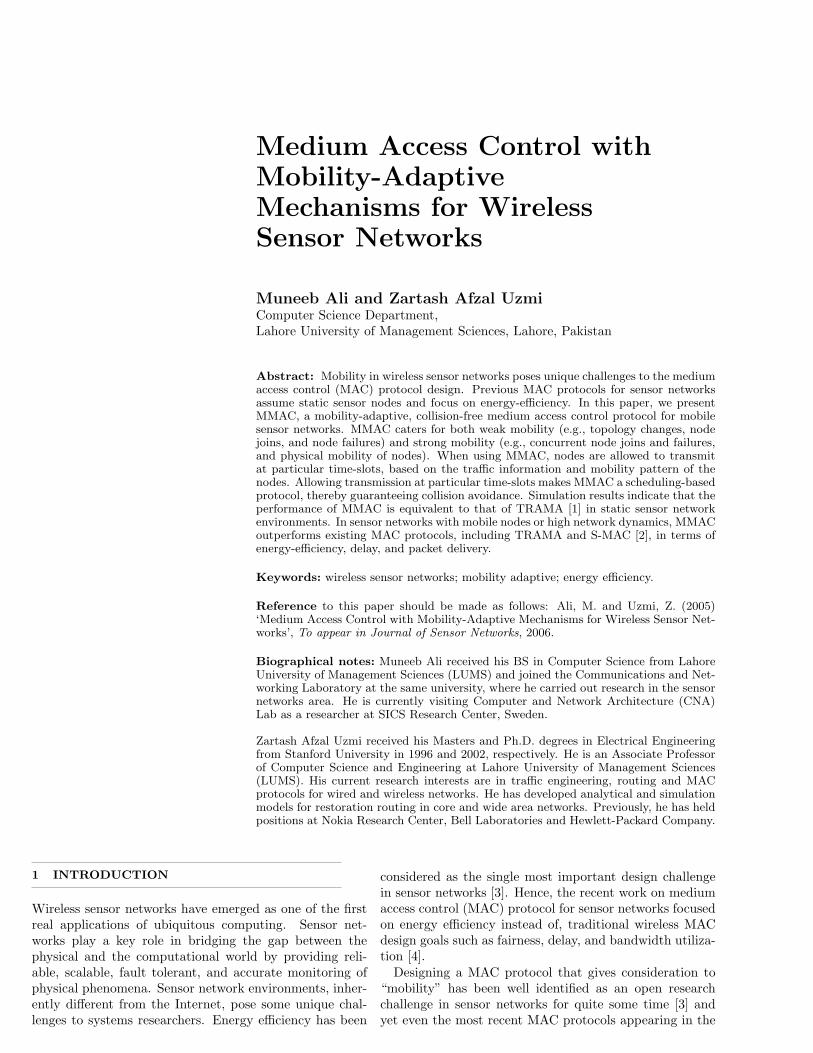
Figure 1: Constant active time (S-MAC) vs Traffic-adaptive dynamic active time (T-MAC)
related work in section 2. Section 3 presents the MMACprotocol and section 4 provides a comparative evaluationof the MMAC protocol, by means of simulations. We drawand summarize the conclusions in section 5.
2 RELATED WORK
MAC protocols for wireless data and voice communicationsystems could be broadly classified into two categories: a)scheduled protocols b) contention based protocols. Thebasic idea of scheduled protocols is to divide the chan-nel into sub-channels based on time, frequency, or codesrespectively. Traditional MAC protocols for wireless net-works [14, 15], were designed to maximize bandwidth uti-lization, promote fair usage of channel by all nodes, andto reduce latency. In sensor networks, the typically lowdata rate relaxes the need for maximum bandwidth utiliza-tion. These sensors generally collaborate with each otherto perform a common task, reducing the importance of fairchannel usage by each node. Further, the sensor networkapplications are typically not sub-second delay sensitive.Hence, the recent work on MAC protocol design in sen-sor networks [1, 16, 17] focused on energy efficiency andcoordination instead of fairness, delay, and bandwidth uti-lization.
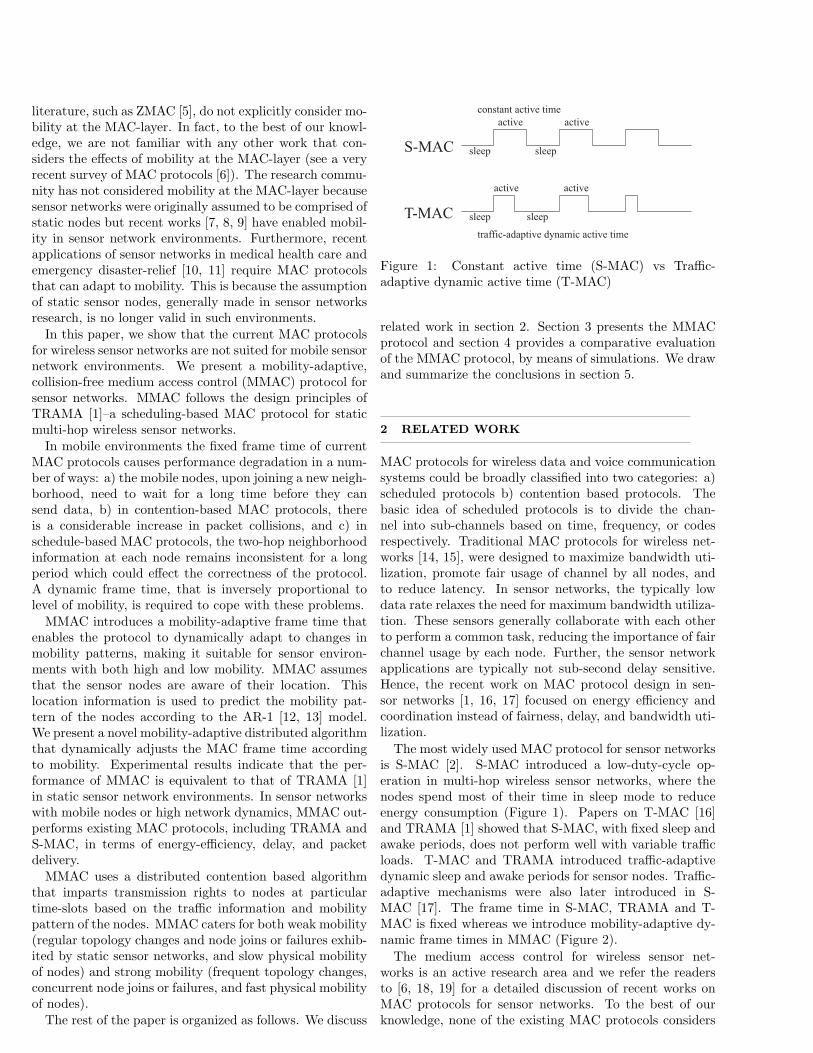
The most widely used MAC protocol for sensor networksis S-MAC [2]. S-MAC introduced a low-duty-cycle op-eration in multi-hop wireless sensor networks, where thenodes spend most of their time in sleep mode to reduceenergy consumption (Figure 1). Papers on T-MAC [16]and TRAMA [1] showed that S-MAC, with fixed sleep andawake periods, does not perform well with variable trafficloads. T-MAC and TRAMA introduced traffic-adaptivedynamic sleep and awake periods for sensor nodes. Traffic-adaptive mechanisms were also later introduced in S-MAC [17]. The frame time in S-MAC, TRAMA and T-MAC is fixed whereas we introduce mobility-adaptive dy-namic frame times in MMAC (Figure 2).
The medium access control for wireless sensor net-works is an active research area and we refer the readersto [6, 18, 19] for a detailed discussion of recent works onMAC protocols for sensor networks. To the best of ourknowledge, none of the existing MAC protocols considers
2
Scheduled Access Random Access
Fixed Frame Time (TRAMA)
Scheduled Access Random Access
Dynamic Frame Time (MMAC)
Scheduled Access Random Access
Figure 2: Fixed frame time (TRAMA) vs Mobility-adaptive dynamic frame time (MMAC)
the effect of mobility at the MAC layer which is the focusof our work.
3 MMAC PROTOCOL
We only discuss the issues relevant to mobility and thereader is encouraged to see [1] for a detailed discussionon basic protocol functionality, traffic-adaptivity, schedulemaintenance, neighbor discovery, and protocol correctness.
3.1 Mobility in Sensor Networks
Sensor networks have high network dynamics; nodes mayfail due to hardware failure or battery consumption, othernew nodes may join the network. The network topology iseffected by such node joins or failures. We define these reg-ular network topology changes and individual node joinsand failures as weak mobility. Sensor networks with staticnodes can also exhibit weak mobility.
More than one nodes may concurrently fail or join thenetwork. Such concurrent node joins and failures are, gen-erally, more difficult to handle, by the MAC protocol, thanindividual ones. Further, the sensor nodes may physicallymove from their location, either because of motion in themedium (e.g. water, air) or by means of special motionhardware in the mobile sensor nodes. We define concur-rent node joins/failures and physical mobility of nodes asstrong mobility.
3.2 Design Goals
In this section, we discuss goals and tradeoffs for mediumaccess control protocol design for wireless sensor networks.The primary goal of MAC protocol design in sensor net-works is energy conservation with main sources of energywastage at the MAC layer being collisions, idle listening,overhearing, and control packet overhead [4]. The MACprotocol should reduce energy consumption by all of thefollowing sources.
• Collision occurs when two or more nodes try to trans-mit at the same time; the packets collide, become cor-rupted and are discarded. In sensor networks, where
every bit transmitted reduces the life time of the net-work [20], such energy waste is unacceptable. Asneighbor information becomes inconsistent at a fasterrate in mobile sensor networks, there is more proba-bility of collisions than static sensor networks.
• Idle listening happens when nodes keep their radios onto receive possible incoming data. In sensor networks,the idle listening time energy cost is in the same mag-nitude of receiving and transmitting costs e.g. theidle:receiving:transmission ratio of Mica2 motes [21]is 1:1:1.41. The traffic pattern, in mobile sensor net-works, is largely unpredictable and the nodes need toremain in the idle listening state for a long time.
• Overhearing occurs when a node receives packets in-tended for other nodes. Overhearing generally in-creases with increase in node density and traffic rate.Mobile sensor nodes are more prone to overhearingunnecessary packets as a node C entering the one-hopneighborhood of node A may hear the packets thatwere originally sent by node A for node B.
• Control packets transmission, consumes energy with-out directly delivering data. A more complex MACprotocol, needed to cope with mobility, would increasethe number of header bits and reduce the efficiency ofthe system.
In deciding between schedule-based or contention-basedMAC protocol design, we preferred the schedule-based de-sign as different nodes, in schedule-based MAC protocols,are scheduled to communicate in different non-interferingsub-channel slots,these protocols are largely collision free.Further, as the receiving nodes need to listen in their ownslot alone, a node can turn the radio off for all other slotsbut the one scheduled to it. This naturally support a low-duty-cycle operation and avoids over-hearing of packets byneighbor nodes.
3.3 Problem Definition
Consider a multi-hop wireless sensor network with homoge-nous sensor nodes. Let,
Ni(α) → {i-hop neighbors of a node α}PPi(α, β) → probability that α ∈ Ni(β)
The network topology could change due to: a) nodejoins, b) node failures, c) concurrent node joins/failures,d) physical mobility of individual nodes. Let,
α ↓ Ni(β) → in-mobility transaction, whereα /∈ Ni(β) before transaction, andα ∈ Ni(β) after transaction
α ↑ Ni(β) → out-mobility transaction, whereα ∈ Ni(β) before transaction, andα /∈ Ni(β) after transaction
3

In static network model (SNM), the only factor effectingPPi(α, β), when initially α ∈ Ni(β), is node failure. In ad-dition to node failure PPi(α, β), when initially α ∈ Ni(β),is also effected by α ↑ Ni(β) in mobile network model(MNM).
In SNM, node join can occur if: a) new static nodes aredeployed, b) nodes wake up after a long time, c) nodesrecover from failure and were considered dead before. InMNM, node join can occur for the added reason of α ↓Ni(β). Let,
Fi → a complete frame i, under considerationwhere, τ = frame time
↓i (α) → {nodes expected to join N2(α) in Fi}↑i (α) → {nodes expected to part N2(α) in Fi}
In MNM, we assume the nodes to be static during Fi.The mobility behavior of N2(α) in Fi is predicted duringFi−1. If a node β is expected to leave N2(α) during Fi thenβ /∈ N2(α) from the START of Fi. Similarly, if a node β isexpected to join N2(α) during Fi then β /∈ N2(α) from theSTART of Fi. In other words, {↓i (α)
⋃ ↑i (α)} /∈ N2(α)from the START of Fi.
3.4 Mobility Estimation
MMAC uses location information to predict the mobilitybehavior of sensor nodes. Localization is a well studiedproblem in wireless sensor networks [22, 23, 24, 25, 26].Most sensor network applications require that nodes areaware of their physical location, this location informationis also used by MMAC. Let,
Γ(α, Fi) → current mean (x,y) of α in Fi
where, x = x co-ordinateand, y = y co-ordinate
Γ(α, Fi−1) → stored mean (x,y) of α in Fi−1
Γ(α, Fi+1) → expected mean (x,y) of α in Fi+1
We use the AR-1 model [12, 13] for mobility estimation.The mobile node’s state, at time t, is defined by a columnvector.
st[xt, xt, ~xt, yt, yt, ~yt]′, (1)
where st is the mobility state, (xt, yt) specify position,xt and yt specify velocity, notation ′ specifies the matrixtranspose operator, and ~xt and ~yt specify the accelerationin the x and y directions. The AR-1 model [12] gives,
st+1 = Ast + ωt, (2)
where A is a 6× 6 transformation matrix, the vector ωt
is a 6× 1 discrete-time zero mean, white Gaussian processwith autocorrelation function Rω(k) = δkQ, where δ0 = 1and δk = 0 when k 6= 0. The matrix Q is the covariancematrix of ωt. The values for matrix A and the covariancematrix Q is estimated based on training data using theYule-Walker equations [27]. See [12, 13, 28] for details.
The mobility state information st, at any given time tcould be used to predict the mobility state at any timet + i. The optimal predicted state st+i of the mobile nodein the minimum mean-square error (MMSE) sense is givenby,
st+i = Aist, (3)
More accurate mobility estimation could be obtained ifwe use AR-3 estimation model instead of the AR-1 modelbut we believe that using the computationally intensiveAR-3 model on memory-constrained sensor nodes is notfeasible from a practical point of view [29]. The choiceof the estimation model, and its effect on different perfor-mance metrics in a mobile sensor network environment isan open area for future research.
3.5 Mobility-Adaptive Algorithm
Basic idea: If a large number of nodes are expected to enteror leave the two-hop neighborhood of a node β, reduce theframe time and vice versa.
1. ∀α ∈ N, where N = set of all nodes, calculate opti-mal predicted states st+0, st+1, . . . , st+j , . . . , st+max,where max = frame time, and t = starting time ofFi+1
2. ∀α ∈ N2(β), calculate
Γ(α, Fi+1)average(st+0, st+1, . . . , st+j , . . . , st+max)
3. Using Γ(β, Fi+1) and ∀α, Γ(α, Fi+1), populate the sets↓i+1 (β) and ↑i+1 (β)
4. If α ∈ {↓i+1 (β)⋃ ↑i+1 (β)} remove α from N2(β)
5. If | ↓i+1 (β)⋃ ↑i+1 (β)| ≥ λmax,
τnew = τ − ( η100 × τ)
where τ = frame time, λmax is a threshold value, andη is a variable.
6. If | ↓i+1 (β)⋃ ↑i+1 (β)| ≤ λmin,
τnew = τ + ( η100 × τ)
where τ = frame time, λmin is a threshold value, andη is a variable.
7. Adjust the number of scheduled access and randomaccess slots according to τnew.
3.6 Protocol Issues
We identify the following main issues with the generic mo-bility adaptive algorithm described above:
1. Mobility Information: Individual nodes can predicttheir future mobility state, but in the mobility adap-tive algorithm each node requires future mobility stateinformation of all the current and potential two-hopneighbor nodes.
4

2. Synchronization: Using the mobility adaptive algo-rithm, individual nodes could independently calculateframe times different from each other; leading to syn-chronization problems in the schedule-based MMACprotocol.
To address these issues we introduce cluster heads inMMAC. Time is divided into rounds with exactly one nodeas cluster head for a given round, r. The responsibilityof being a cluster head is rotated among sensor nodes toconserve energy. We use a variation of the cluster headselection and rotation mechanism of LEACH [30] to selectcluster heads in MMAC. Each node α determines a randomnumber between 0 and 1. If the number is less than athreshold λhead, the node becomes a cluster-head for thecurrent round. The threshold is set as [31],
λhead = P
1− P (r mod1P
)× Ecurrent
Emax∀α ∈ G
λhead = 0 ∀α /∈ G
where P is the cluster-head probability, r is the numberof current rounds, G is the set of nodes that have not beencluster-heads in the last 1
P rounds, Ecurrent is the currentenergy of the node and Emax is the initial energy of thenode. We define round r as r = k × τ where, τ = frametime, and k is an integer variable > 1. The number ofcluster heads is set as 5% of the total sensor nodes, whichis a reasonable number [30]. Each node α becomes memberof a cluster with exactly one node as cluster-head as in theLEACH protocol [30].
According to efficient clustering schemes [30] aroundsix percent of all nodes in the network become clusterheads and as these heads are evenly distributed in the net-work [32, 33] which puts a limit on the number of membersper cluster.
3.7 Mobility Information
We modify the signal header and the data header of MACpackets to include the predicted mobility state informa-tion. At the start of frame Fi each node α independentlycalculates the expected mean (x, y) of α in frame Fi+1 as,
Γ(α, Fi+1)average(st+0, st+1, . . . , st+j , . . . , st+max)
and then sends Γ(α, Fi+1) in the header of every signaland data packet generated by α. The head node alwayskeeps the radio to listen mode and collects Γ(α, Fi+1) foreach node that transmitted a data or signal packet duringFi. The last frame slot is reserved for a BROADCASTfrom the head. This BROADCAST from the head sendsall stored Γ(α, Fi+1) to the member nodes. This ensuresthat each node α has ‘best-effort’ knowledge of the pre-dicted mobility states of it’s current and potential two-hopneighbors. We define this knowledge as best-effort becauseclearly the head would not have information about a nodeβ that would actually move into the the two-hop neigh-borhood of α but has yet to transmit anything. The head
node would get mobility information of such a node β assoon as it transmits a packet.
3.8 Synchronization
To address the synchronization problem we change thelast step of the generic mobility adaptive algorithm. Eachnode α independently calculates τnew but instead of ad-justing the number of scheduled access and random ac-cess slots, α includes τnew in the data and signal headeralong with Γ(α, Fi+1). The head node of cluster c collectsτnew from the headers of transmitting nodes α ∈ cluster c.The head calculates τmean = average(all received τnew) ineach frame. We introduce a global synchronization period(GSP), consisting of p empty slots, that occurs at the endof every round r, where r = k×τ . At the start of GSP, thelatest values of τmean are collected from all cluster headsand their mean value τGSP is disseminated in the entirenetwork. All participating nodes of the network adjustthe scheduled access and random access slots according toτGSP , new cluster heads are elected and the next roundbegins.
The frame time could ONLY change during a GSP. τGSP
is the new frame for the next round with respective sched-uled access and random access slots. A GSP occurs afterk frames (i.e. after one round) and there could be changesin the mobility rate during this time. MMAC dynamicallyadapts to these changes by altering the division betweenscheduled access and random access slots after each frame.Each cluster head sends the calculated τmean in each frameto all member nodes during the BROADCAST messageduring the last reserved frame slot. If the value of τmean
is less than that of the previous one stored at the nodes,they increase the number of random access slots and de-crease the scheduled access slots keeping the total frametime constant and vice versa. Therefore,
• After a GSP, all frame times, schedule access times,and random access times would be the same and theywould reflect the mobility of all nodes in the networke.g. if recently most of the nodes exhibited greatermobility the frame time would be reduced.
• After each frame before the next GSP, the frame timesin the network would remain the same but the randomaccess period of each cluster-members would increaseor decrease reflecting the mobility patterns of clusternodes.
• Frame times would be the same ∀α ∈ network.
• If all two-hop members of a node α ∈ a cluster c, thentheir random access time and scheduled access timewould be the same.
We define an edge node e as a node who has two-hopneighbors belonging to more than one virtual cluster. Inthe two-hop neighborhood of e the frame size of two-hopnodes α would be the same but the random access timecould be different (Figure 3). Such a node e should use
5

Scheduled Access Random Access
Scheduled Access Random Access
Edge Node Problem
Figure 3: A node α receiving random access slot numbersfrom more than one head node
the shortest data transmission time and the shortest ran-dom access time out of the different access times in-usei.e. according to figure 3 e should NOT transmit anythingbetween the overlapping region.
3.9 Localization
Localization is the natural first step towards handling mo-bility. Most sensor network applications, for static or mo-bile sensor networks, assume that location information isavailable to the application. MMAC makes use of locationinformation for mobility estimation. Accuracy of mobilityestimation depends on the accuracy of the underlying lo-calization mechanism. Localization is a well-studied prob-lem is wireless sensor networks [24, 26, 34] and studies haveshown that many multi-hop localization algorithms haveyielded extremely accurate results in simulation and thereare works going on to bridge the gap between simulationand real world performance of localization algorithms [35].There have also been some recent works on localizationfor mobile sensor networks [36]. A detailed discussion oflocalization algorithms is beyond the scope of this paper.
3.10 Energy Costs
Communication costs in sensor networks are much higherthan computation costs [37] and it is actually desirableto have more computation done at each node (in-networkprocessing) if that could reduce on communication [38].Furthermore, with advances in hardware technologies, spe-cially low-power computing chips, the energy costs of com-putations are reducing as directed by Moore’s law but theenergy consumption of wireless radios is largely determinedby laws of physics which puts a limit on reducing energyused for communication [39]. Thus, in the coming yearsthe wireless interface will be the primary consumer of en-ergy in any device that combines computation and radios(this is true to a certain extent even today) [39]. Basedon these current and future trends in hardware energy-consumption we primarily focus on communication energycosts while evaluating the energy costs of MMAC.
In the AR-1 model, self mobility could be estimatedwithout any communication. However, for the mobility in-formation to be useful to MMAC, any node, say α, wouldalso need information on all neighbor nodes’ mobility esti-mation. Every node performs local processing and insteadof sending out raw location values each node transmitsonly the final locally calculated predicted future locationinformation but even such predicted future location would
need to be communicated at regular intervals. In section 4we present a cost-benefit evaluation, in terms of energy ef-ficiency, to determine if it is worth expending energy onsuch mobility information.
4 Protocol Evaluation
We performed a comparative study of MMAC withTRAMA [1], SMAC [2], and CSMA. The study was carriedout by doing extensive simulations in NS2.
4.1 Protocol Comparison Set
MAC research for sensor networks has been an active re-search area and there are a lot of proposed MAC protocolsin the literature. A recent survey of MAC protocols [6] liststwenty worth mentioning MAC protocols for the area. It isnot possible to have a comparison with each and every oneof these MAC protocols proposed in the literature. There-fore, in our work we carefully choose a comparison protocolset from the available choices. CSMA is included in the setas a worst-case protocol as it has no energy saving mech-anisms. The performance of contention-based protocolsfalls back to that of CSMA in high contention environ-ments or high data rates [5] but does not go below that.Therefore, CSMA becomes a good choice for a worst-caseprotocol. TRAMA embodies schedule-based MAC proto-cols for wireless sensor networks, whereas SMAC repre-sents contention-based MAC protocols.
When referring to SMAC researchers generally mean theoriginally proposed SMAC [2] and not the later versionwith some traffic-adaptive mechanisms, called adaptive lis-tening, [17]. SMAC with adaptive listening [17] wouldbehave like the traffic-adaptive protocols TMAC [16] andTRAMA [1]. Hence, when choosing protocols for our pro-tocol comparison set we include SMAC [2] as represen-tative of low-duty-cycle protocols without traffic-adaptivemechanisms and from the category of MAC protocols withtraffic-adaptive mechanisms we choose TRAMA as the rep-resentative protocol of this category.
4.2 Simulation Environment
The underlying physical model, in all our experiments, isbased on TR1000 [40]. For SMAC, the SYNC-INTERVALis 10sec and the duty cycle is varied as either 10% or50%. For TRAMA and MMAC, SCHEDULE-INTERVAL is100 transmission slots. Random access period is 72 trans-mission slots and is repeated every 10000 transmissionslots. MMAC dynamically changes the number of randomaccess period slots and the respective repeat rate. Nodeshave transmission range of 100 meters and they are ran-domly deployed on a 500m × 500m plane. Traffic is gen-erated, at a variable rate, on the sensor nodes. All sinksare corner-sinks. In order to route a packet to the sink, ateach hop the node simply forwards the packet to the nodecloser to the sink. The simulation is allowed to run for 500
6
4 6 8 10 12 14 1610
−3
10−2
10−1
100
101
102
Packet Generation Interval (seconds)
Avg
. Del
ay (
seco
nds)
TRAMASMACCSMAMMAC
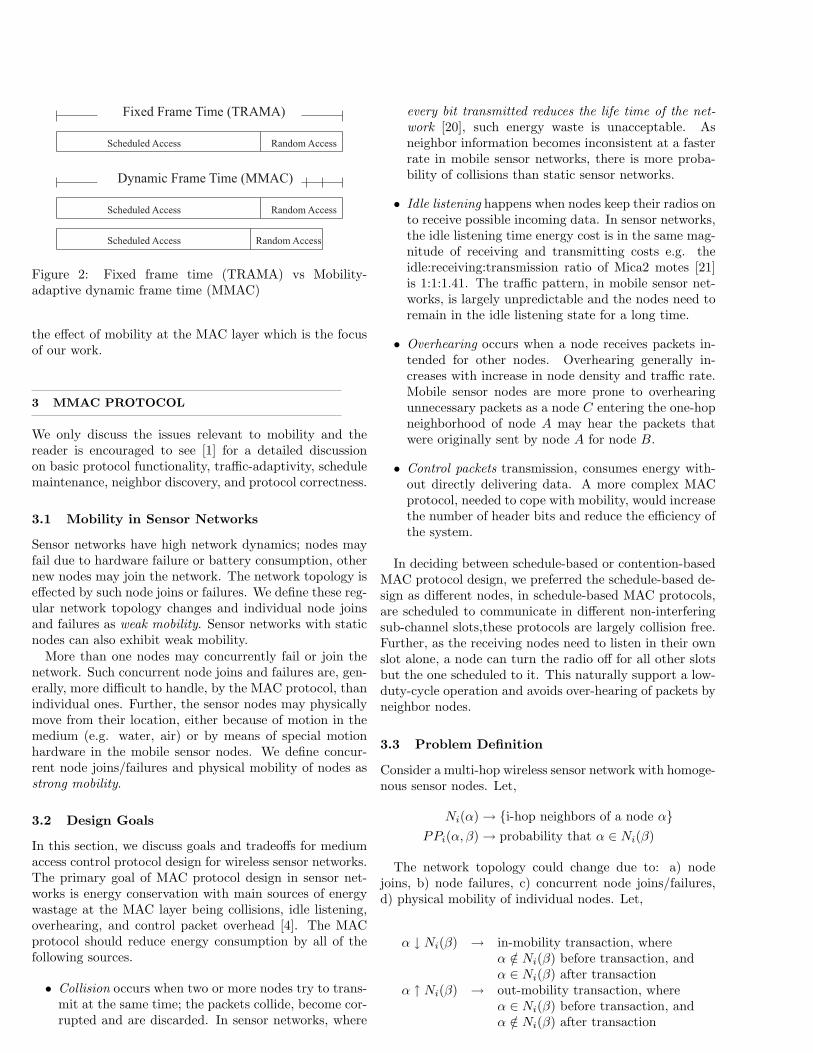
Figure 4: Average packet delay (variable traffic)
seconds and the results are averaged over several hundredsimulation runs.
4.3 Energy Calculations
The energy consumption in simulation is calculated usingthe simple first order radio model [30] for wireless commu-nications in NS2. Let Eelectric be the energy dissipatedby the transmitter-receiver and Eamplifier be the energydissipated by the transmit amplifier. Then,
ETransmit(k, d) = Eelectric × k + Eamplifier × k × d2 (4)
EReceive(k) = Eelectric × k (5)
Where Eelectric and Eamplifier have values 50nJ/bit and100pJ/bit/m2 respectively, k is the data rate in bits perpacket and d is the distance. The nodes in the simula-tor are initialized at different energy levels and then aftereach packet transmission, depending upon the size of thepacket in bits and the distance that the packet is sent over,the energy consumed by communication of the packet is re-spectively deducted from the energy of the respective nodesinvolved in the communication.
4.4 Simulation Results
Figure 4 gives average packet delay for the network. Theaverage mobility of the nodes is set at 0.5 meters persecond. Nodes generate traffic at variable rates. Aver-age delay values of contention-based protocols CSMA andSMAC, are much less then that of schedule-based proto-cols. This is because of the latency introduced by randomscheduling in TRAMA and MMAC.
Figure 5 shows the change in average packet delay as weincrease the average mobility of the participating nodesin the network. As, MMAC adapts it’s frame time, num-ber of data-transfer frames, and number of random-accessframes, the average delay remains, almost, constant withincrease in mobility rate. However, CSMA, SMAC, andTRAMA exhibit degrading average delay with increase inmobility rate.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 110
−3
10−2
10−1
100
101
102
Speed (meters / second)
Avg
. Del
ay (
seco
nds)
TRAMASMACCSMAMMAC
Figure 5: Average packet delay (increasing mobility)
4 6 8 10 12 14 16−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Packet Generation Interval (seconds)
Per
cent
age
Rec
eive
d
TRAMASMACCSMAMMAC
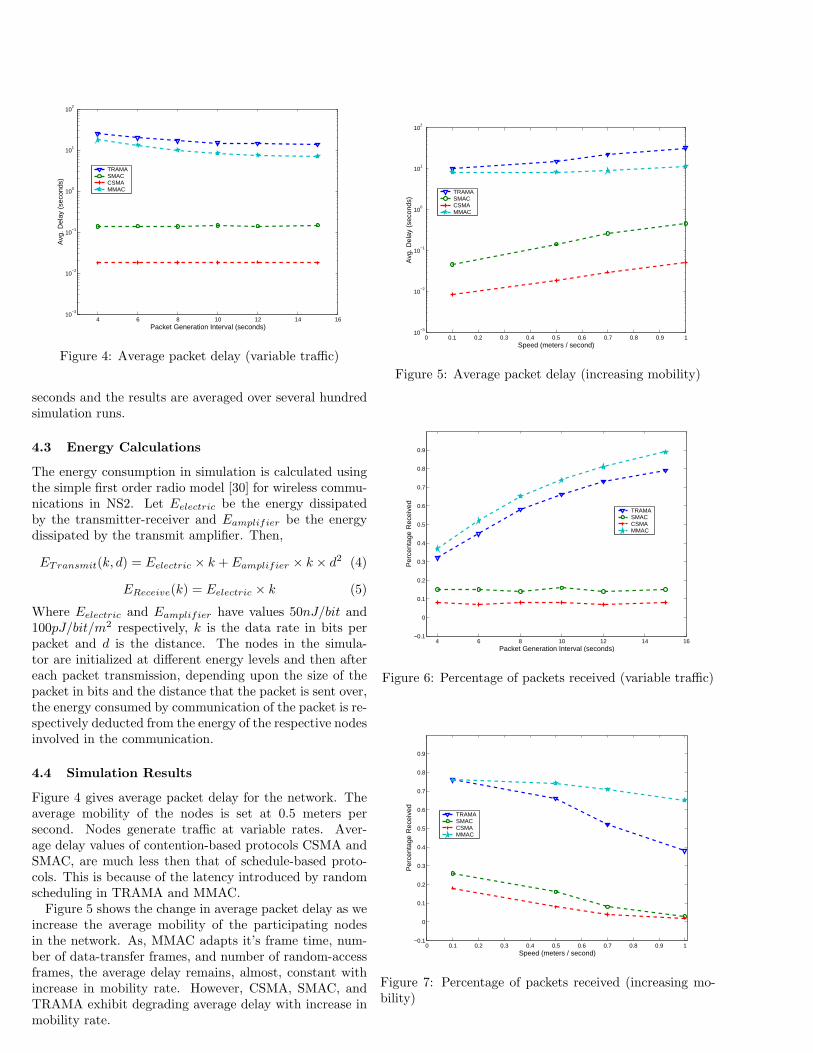
Figure 6: Percentage of packets received (variable traffic)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Speed (meters / second)
Per
cent
age
Rec
eive
d
TRAMASMACCSMAMMAC
Figure 7: Percentage of packets received (increasing mo-bility)
7
0 1 2 3 4 5 6 7 8 9 10 110
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Load (bytes / node / s)
Avg
. Ene
rgy
used
(m
A /
node
) TRAMASMACCSMAMMAC
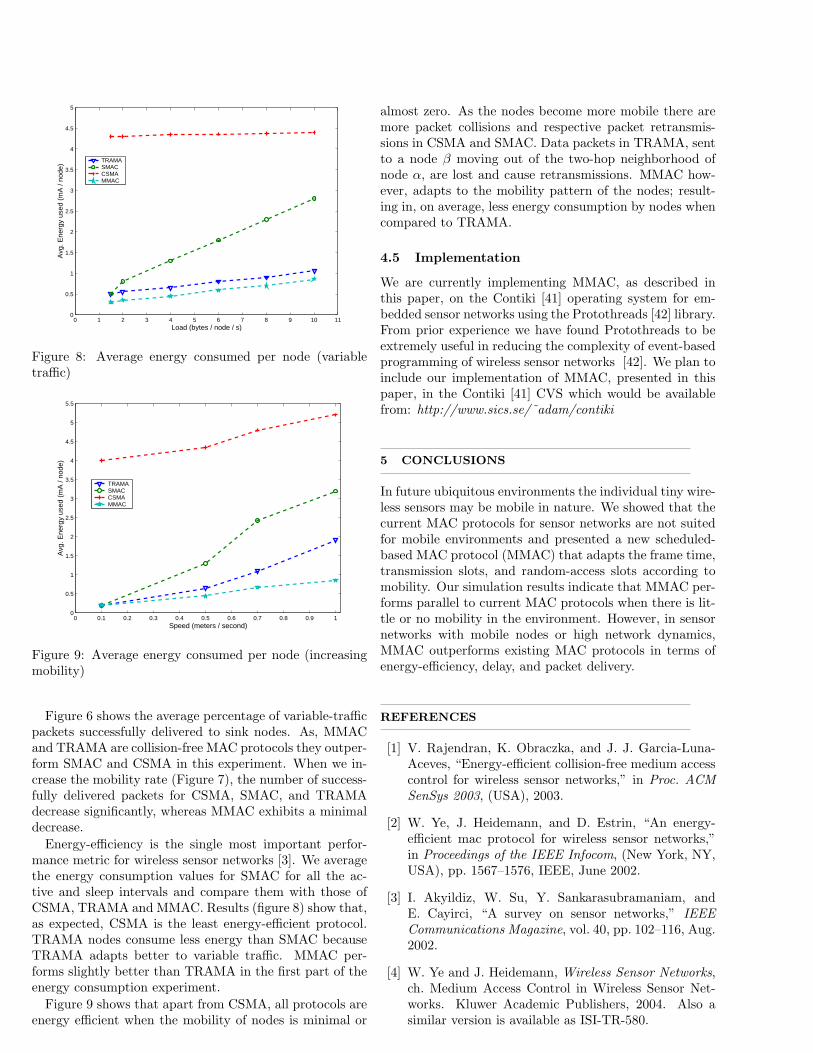
Figure 8: Average energy consumed per node (variabletraffic)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
Speed (meters / second)
Avg
. Ene
rgy
used
(m
A /
node
)
TRAMASMACCSMAMMAC
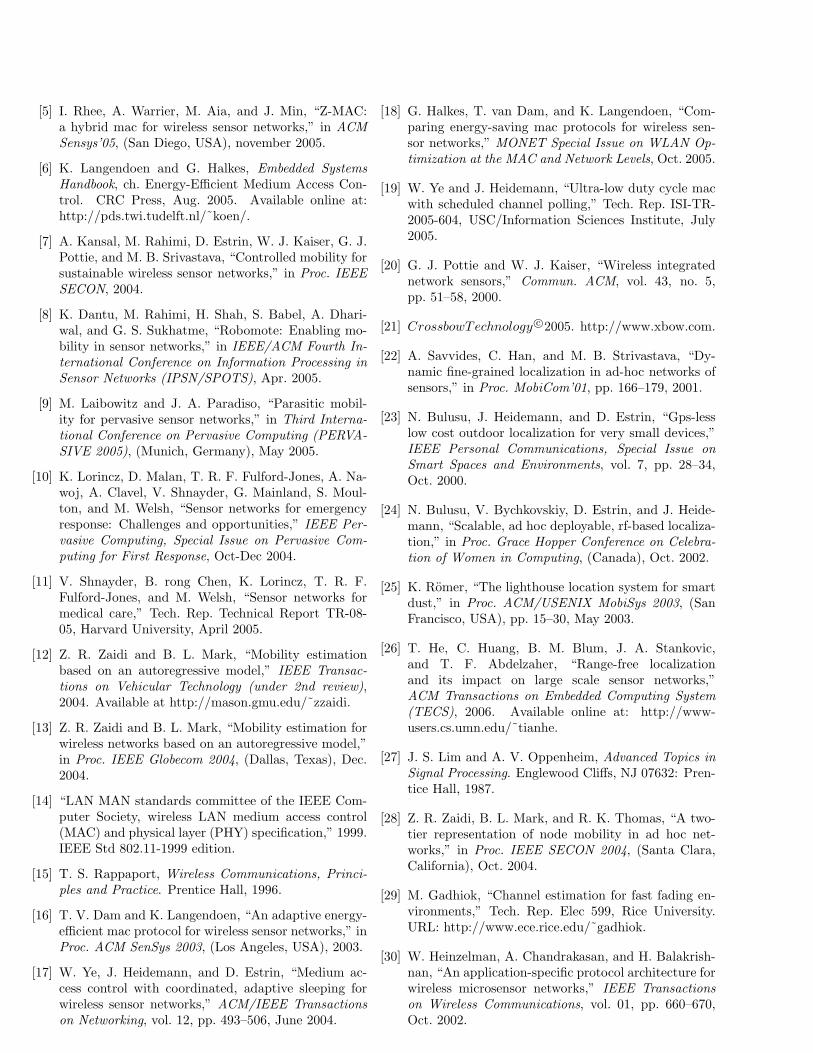
Figure 9: Average energy consumed per node (increasingmobility)
Figure 6 shows the average percentage of variable-trafficpackets successfully delivered to sink nodes. As, MMACand TRAMA are collision-free MAC protocols they outper-form SMAC and CSMA in this experiment. When we in-crease the mobility rate (Figure 7), the number of success-fully delivered packets for CSMA, SMAC, and TRAMAdecrease significantly, whereas MMAC exhibits a minimaldecrease.
Energy-efficiency is the single most important perfor-mance metric for wireless sensor networks [3]. We averagethe energy consumption values for SMAC for all the ac-tive and sleep intervals and compare them with those ofCSMA, TRAMA and MMAC. Results (figure 8) show that,as expected, CSMA is the least energy-efficient protocol.TRAMA nodes consume less energy than SMAC becauseTRAMA adapts better to variable traffic. MMAC per-forms slightly better than TRAMA in the first part of theenergy consumption experiment.
Figure 9 shows that apart from CSMA, all protocols areenergy efficient when the mobility of nodes is minimal or
almost zero. As the nodes become more mobile there aremore packet collisions and respective packet retransmis-sions in CSMA and SMAC. Data packets in TRAMA, sentto a node β moving out of the two-hop neighborhood ofnode α, are lost and cause retransmissions. MMAC how-ever, adapts to the mobility pattern of the nodes; result-ing in, on average, less energy consumption by nodes whencompared to TRAMA.
4.5 Implementation
We are currently implementing MMAC, as described inthis paper, on the Contiki [41] operating system for em-bedded sensor networks using the Protothreads [42] library.From prior experience we have found Protothreads to beextremely useful in reducing the complexity of event-basedprogramming of wireless sensor networks [42]. We plan toinclude our implementation of MMAC, presented in thispaper, in the Contiki [41] CVS which would be availablefrom: http://www.sics.se/˜adam/contiki
5 CONCLUSIONS
In future ubiquitous environments the individual tiny wire-less sensors may be mobile in nature. We showed that thecurrent MAC protocols for sensor networks are not suitedfor mobile environments and presented a new scheduled-based MAC protocol (MMAC) that adapts the frame time,transmission slots, and random-access slots according tomobility. Our simulation results indicate that MMAC per-forms parallel to current MAC protocols when there is lit-tle or no mobility in the environment. However, in sensornetworks with mobile nodes or high network dynamics,MMAC outperforms existing MAC protocols in terms ofenergy-efficiency, delay, and packet delivery.
REFERENCES
[1] V. Rajendran, K. Obraczka, and J. J. Garcia-Luna-Aceves, “Energy-efficient collision-free medium accesscontrol for wireless sensor networks,” in Proc. ACMSenSys 2003, (USA), 2003.
[2] W. Ye, J. Heidemann, and D. Estrin, “An energy-efficient mac protocol for wireless sensor networks,”in Proceedings of the IEEE Infocom, (New York, NY,USA), pp. 1567–1576, IEEE, June 2002.
[3] I. Akyildiz, W. Su, Y. Sankarasubramaniam, andE. Cayirci, “A survey on sensor networks,” IEEECommunications Magazine, vol. 40, pp. 102–116, Aug.2002.
[4] W. Ye and J. Heidemann, Wireless Sensor Networks,ch. Medium Access Control in Wireless Sensor Net-works. Kluwer Academic Publishers, 2004. Also asimilar version is available as ISI-TR-580.
8
[5] I. Rhee, A. Warrier, M. Aia, and J. Min, “Z-MAC:a hybrid mac for wireless sensor networks,” in ACMSensys’05, (San Diego, USA), november 2005.
[6] K. Langendoen and G. Halkes, Embedded SystemsHandbook, ch. Energy-Efficient Medium Access Con-trol. CRC Press, Aug. 2005. Available online at:http://pds.twi.tudelft.nl/˜koen/.
[7] A. Kansal, M. Rahimi, D. Estrin, W. J. Kaiser, G. J.Pottie, and M. B. Srivastava, “Controlled mobility forsustainable wireless sensor networks,” in Proc. IEEESECON, 2004.
[8] K. Dantu, M. Rahimi, H. Shah, S. Babel, A. Dhari-wal, and G. S. Sukhatme, “Robomote: Enabling mo-bility in sensor networks,” in IEEE/ACM Fourth In-ternational Conference on Information Processing inSensor Networks (IPSN/SPOTS), Apr. 2005.
[9] M. Laibowitz and J. A. Paradiso, “Parasitic mobil-ity for pervasive sensor networks,” in Third Interna-tional Conference on Pervasive Computing (PERVA-SIVE 2005), (Munich, Germany), May 2005.
[10] K. Lorincz, D. Malan, T. R. F. Fulford-Jones, A. Na-woj, A. Clavel, V. Shnayder, G. Mainland, S. Moul-ton, and M. Welsh, “Sensor networks for emergencyresponse: Challenges and opportunities,” IEEE Per-vasive Computing, Special Issue on Pervasive Com-puting for First Response, Oct-Dec 2004.
[11] V. Shnayder, B. rong Chen, K. Lorincz, T. R. F.Fulford-Jones, and M. Welsh, “Sensor networks formedical care,” Tech. Rep. Technical Report TR-08-05, Harvard University, April 2005.
[12] Z. R. Zaidi and B. L. Mark, “Mobility estimationbased on an autoregressive model,” IEEE Transac-tions on Vehicular Technology (under 2nd review),2004. Available at http://mason.gmu.edu/˜zzaidi.
[13] Z. R. Zaidi and B. L. Mark, “Mobility estimation forwireless networks based on an autoregressive model,”in Proc. IEEE Globecom 2004, (Dallas, Texas), Dec.2004.
[14] “LAN MAN standards committee of the IEEE Com-puter Society, wireless LAN medium access control(MAC) and physical layer (PHY) specification,” 1999.IEEE Std 802.11-1999 edition.
[15] T. S. Rappaport, Wireless Communications, Princi-ples and Practice. Prentice Hall, 1996.
[16] T. V. Dam and K. Langendoen, “An adaptive energy-efficient mac protocol for wireless sensor networks,” inProc. ACM SenSys 2003, (Los Angeles, USA), 2003.
[17] W. Ye, J. Heidemann, and D. Estrin, “Medium ac-cess control with coordinated, adaptive sleeping forwireless sensor networks,” ACM/IEEE Transactionson Networking, vol. 12, pp. 493–506, June 2004.
[18] G. Halkes, T. van Dam, and K. Langendoen, “Com-paring energy-saving mac protocols for wireless sen-sor networks,” MONET Special Issue on WLAN Op-timization at the MAC and Network Levels, Oct. 2005.
[19] W. Ye and J. Heidemann, “Ultra-low duty cycle macwith scheduled channel polling,” Tech. Rep. ISI-TR-2005-604, USC/Information Sciences Institute, July2005.
[20] G. J. Pottie and W. J. Kaiser, “Wireless integratednetwork sensors,” Commun. ACM, vol. 43, no. 5,pp. 51–58, 2000.
[21] CrossbowTechnology c©2005. http://www.xbow.com.
[22] A. Savvides, C. Han, and M. B. Strivastava, “Dy-namic fine-grained localization in ad-hoc networks ofsensors,” in Proc. MobiCom’01, pp. 166–179, 2001.
[23] N. Bulusu, J. Heidemann, and D. Estrin, “Gps-lesslow cost outdoor localization for very small devices,”IEEE Personal Communications, Special Issue onSmart Spaces and Environments, vol. 7, pp. 28–34,Oct. 2000.
[24] N. Bulusu, V. Bychkovskiy, D. Estrin, and J. Heide-mann, “Scalable, ad hoc deployable, rf-based localiza-tion,” in Proc. Grace Hopper Conference on Celebra-tion of Women in Computing, (Canada), Oct. 2002.
[25] K. Romer, “The lighthouse location system for smartdust,” in Proc. ACM/USENIX MobiSys 2003, (SanFrancisco, USA), pp. 15–30, May 2003.
[26] T. He, C. Huang, B. M. Blum, J. A. Stankovic,and T. F. Abdelzaher, “Range-free localizationand its impact on large scale sensor networks,”ACM Transactions on Embedded Computing System(TECS), 2006. Available online at: http://www-users.cs.umn.edu/˜tianhe.
[27] J. S. Lim and A. V. Oppenheim, Advanced Topics inSignal Processing. Englewood Cliffs, NJ 07632: Pren-tice Hall, 1987.
[28] Z. R. Zaidi, B. L. Mark, and R. K. Thomas, “A two-tier representation of node mobility in ad hoc net-works,” in Proc. IEEE SECON 2004, (Santa Clara,California), Oct. 2004.
[29] M. Gadhiok, “Channel estimation for fast fading en-vironments,” Tech. Rep. Elec 599, Rice University.URL: http://www.ece.rice.edu/˜gadhiok.
[30] W. Heinzelman, A. Chandrakasan, and H. Balakrish-nan, “An application-specific protocol architecture forwireless microsensor networks,” IEEE Transactionson Wireless Communications, vol. 01, pp. 660–670,Oct. 2002.
9
[31] M. Handy, M. Haase, and D. Timmermann, “Low en-ergy adaptive clustering hierarchy with deterministiccluster-head selection,” in Proc. IEEE MWCN 2002,(Stockholm), 2002.
[32] O. Younis and S. Fahmy, “HEED: A hybrid, energy-efficient, distributed clustering approach for ad hocsensor networks,” IEEE Transactions on Mobile Com-puting, vol. 03, pp. 366–379, Oct. 2004.
[33] H. Chan and A. Perrig, “ACE: An emergent algo-rithm for highly uniform cluster formation,” in Euro-pean Workshop on Wireless Sensor Networks (EWSN2004), (Berlin, Germany), Jan. 2004.
[34] K. Lorincz and M. Welsh, “Motetrack: A robust, de-centralized approach to rf-based location tracking,” inWorkshop on Location and Context-Awareness (LoCA2005) at Pervasive 2005, (Munich, Germany), May2005.
[35] K. Whitehouse, C. Karlof, A. Woo, F. Jiang, andD. Culler, “The effects of ranging noise on multihoplocalization: an empirical study,” in Fourth Interna-tional Conference on Information Processing in Sen-sor Networks (IPSN ’05), (Los Angeles, California),Apr. 2005.
[36] L. Hu and D. Evans, “Localization for mobile sensornetworks,” in ACM MobiCom 2004, Sept. 2004.
[37] V. Raghunathan, C. Schurgers, S. Park, and M. Sri-vastava, “Energy-aware wireless microsensor net-works,” IEEE Signal Processing Magazine, vol. 19,pp. 40–50, Mar. 2002.
[38] F. Silva, J. Heidemann, R. Govindan, and D. Es-trin, “Directed diffusion,” Tech. Rep. ISI-TR-2004-586, USC/ISI, January 2004. To appear in Frontiersin Distributed Sensor Networks, S. S. Iyengar and R.R. Brooks, eds.
[39] D. Clark, C. Partridge, R. Braden, B. Davie, S. Floyd,V. Jacobson, D. Katabi, G. Minshall, K. Ramakrish-nan, T. Roscoe, I. Stoica, J.Wroclawski, and L. Zhang,“Making the world (of communications) a differenceplace,” ACM SIGCOMM Computer CommunicationReview, July 2005.
[40] Tr1000 Specifications available at URL:http://www.rfm.com/products/data/tr1000.pdf.
[41] A. Dunkels, B. Gronvall, and T. Voigt, “Contiki - alightweight and flexible operating system for tiny net-worked sensors,” in Proc. of the First IEEE Workshopon Embedded Networked Sensors, (Florida, USA),Nov. 2004.
[42] A. Dunkels, O. Schmidt, and T. Voigt, “Using Pro-tothreads for Sensor Node Programming,” in Proc.of the Workshop on Real-World Wireless Sensor Net-works (REALWSN’05), (Stockholm, Sweden), June2005.
10
Related Documents











