
Mechanical Vibrations. Single degree of freedom system with viscous damping: System free body diagram C is the damping constant or coefficient.
Dec 19, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
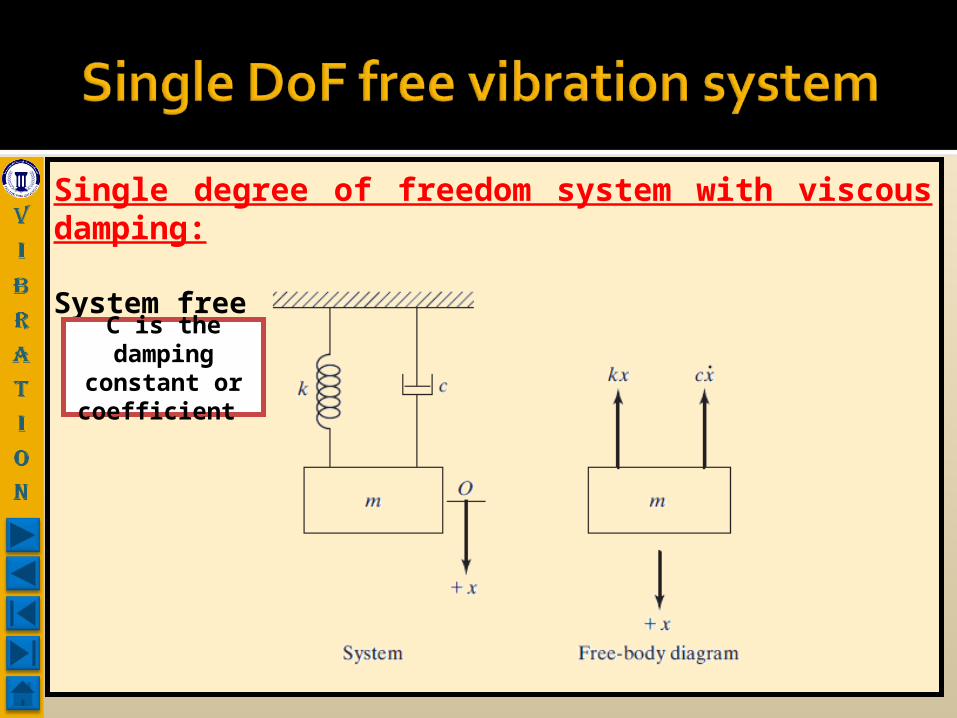
Single degree of freedom system with viscous damping:
System free body diagram
C is the damping constant or coefficient
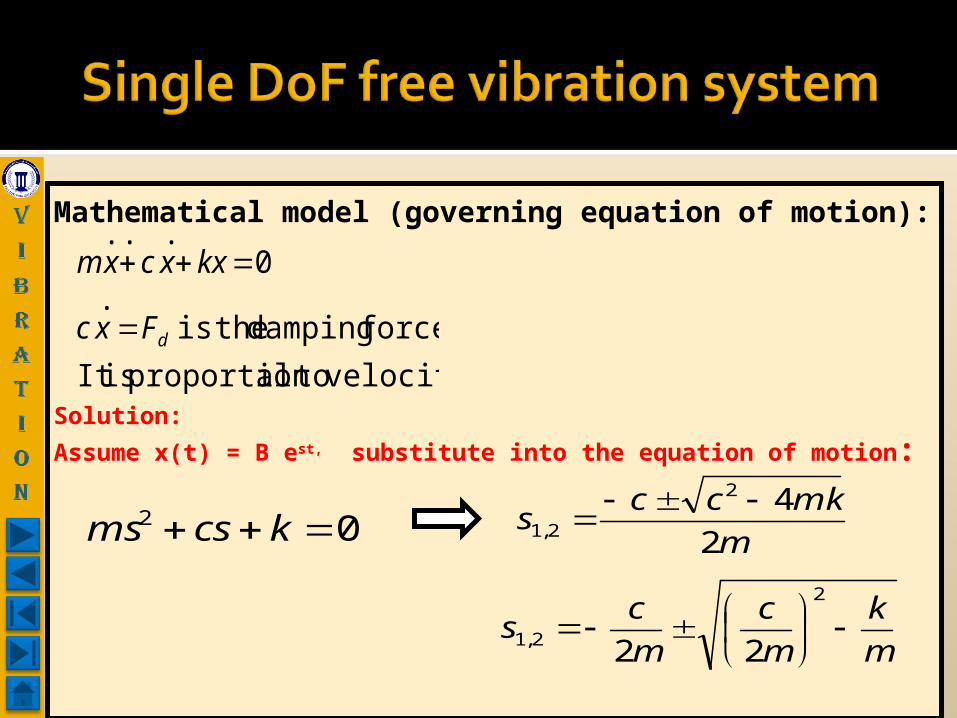
Mathematical model (governing equation of motion):
Solution:
Assume x(t) = B est, substitute into the equation of motion:
velocity toalproportion isIt
force. damping theis .
0...
dFxc
kxxcxm
02 kcsms m
mkccs
2
42
2,1
m
k
m
c
m
cs
2
2,1 22
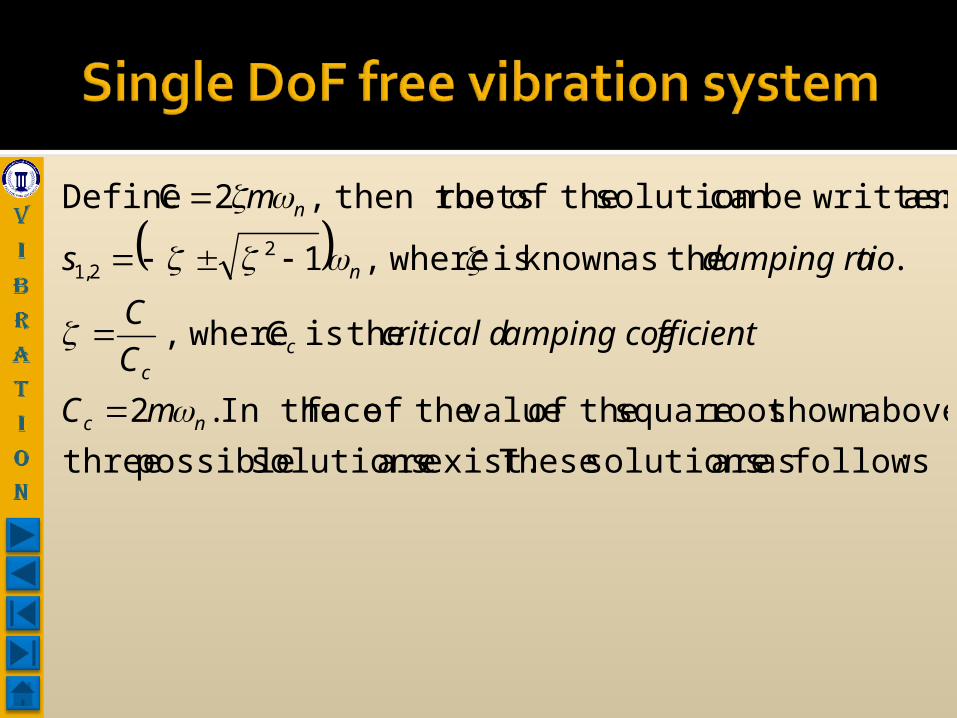
:follows as are solutions These exist. are solutions possible three
aboveshown root square theof value theof face In the .2
theis where,
. theasknown is where,1
:as written becan solution theof roots then the,2C Define
22,1
nc
cc
n
n
mC
fficientamping coecritical dCC
C
tiodamping ras
m
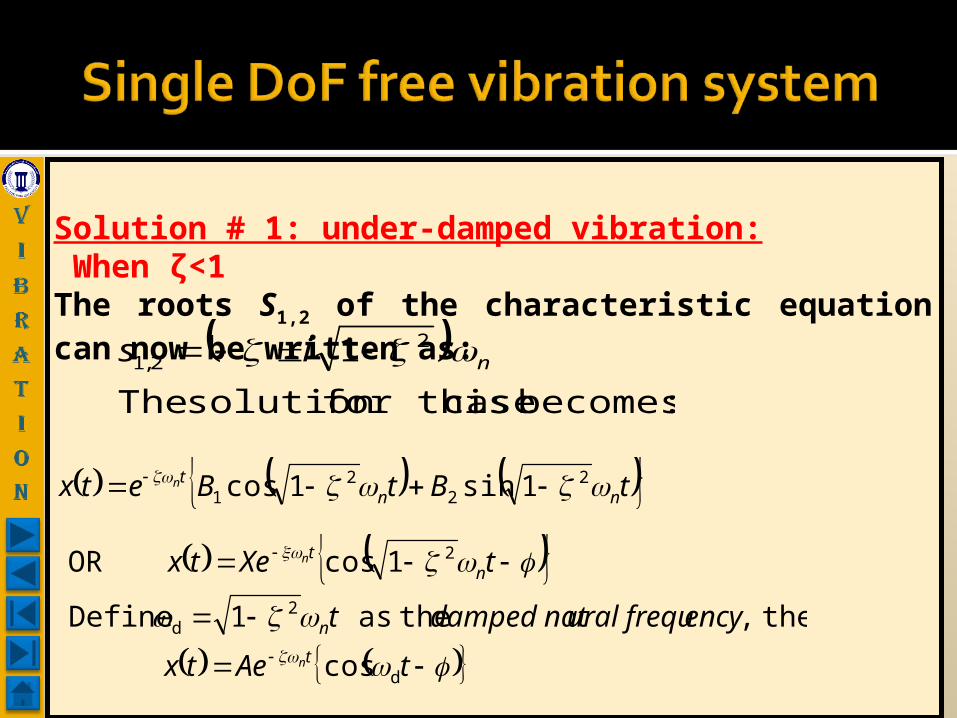
Solution # 1: under-damped vibration: When ζ<1The roots S1,2 of the characteristic equation can now be written as:
:becomes case for thissolution The
1 22,1 nis
tBtBetx nntn 2
22
1 1sin1cos
tAetx
encyural frequdamped natt
tXetx
t
n
nt
n
n
d
2d
2
cos
then, theas 1 Define
1cos OR

The solution (above) for the under-damped vibration case (consists of a harmonic motion of frequency d and an amplitude
Note that:
shown. as time
with decayinglly exponantia is case for this amplitde The
motion. theof conditions
inatial thefrom determined becan and angle. phase theis
tan and 1
2122
21
A
B
BBBA
tnAe
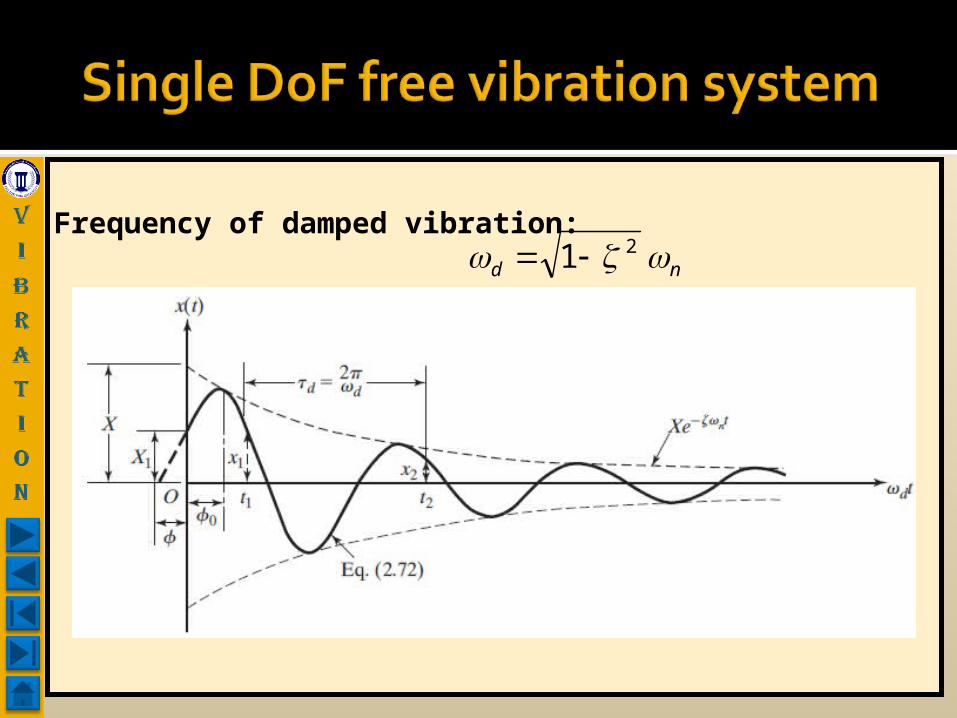
Frequency of damped vibration:
Under-damped vibration
nd 1 2
Critical damping (cc)The critical damping cc is defined as the value of the damping constant c for which the radical in s-equation becomes zero:
ncc m
m
kmc
m
k
m
c 2202
2

Solution # 2: critically damped vibration (ζ=1): For this case the roots of the characteristic equation become:
ns 2,1
tBBetx tn21
:as written becan solution heTherefor t
figure.
in theshown as harmoniclonger no ismotion The .conditions
inatial from determined becan that constants are and 21 BB

-The system returns to the equilibrium position in short time-The shape of the curve depends on initial conditions as shown-The moving parts of many electrical meters and instruments are criticallydamped to avoid overshoot and oscillations .

Solution # 3: over-damped vibration (ζ>1)For this case the roots of the characteristic equation become:
ns 122,1
motion. theof conditions initial the
knowing from determined be toconstants are and
as, written becan solution theTherefore,
21
1
2
1
1
22
BB
eBeBtxtt nn

Graphical representation of the motions of the damped systems

Logarithmic decrementThe logarithmic decrement represents the rate at which the amplitude of a free-damped vibration decreases. It is defined as the natural logarithm of the ratio of any two successive amplitudes.

Logarithmic decrement:
But
2
1
2
1
cos
cos
)(
)(2
1
tAe
tAe
tx
tx
dt
dt
n
n
1
12
12
cos
2coscos
2
t
tt
tt
d
dd
ddd
So dn
dn
n
ee
e
tx
txt
t
1
1
)(
)(
2
1
Assume: δ is the logarithmic decrement
222
1
1
2
1
2
)(
)(ln
n
ndntx
tx
Logarithmic decrement: is dimensionless

Logarithmic decrement
222
For small damping ; ζ <<1
2

Generally, when the amplitude after a number of cycles “n” is known, logarithmic decrement can be obtained as follows:
motion. decayed theof cyclesn after amplitude
known other theis (t) amplitude,known first theis (t) where
1
2
)(
)(ln
1
1
2
1
n
n
xx
tx
tx
n
Example 2.6
An under-damped shock absorber is to be designed for a motorcycle of mass 200 kg (Fig.(a)).When the shock absorber is subjected to an initial vertical velocity due to a road bump, the resulting displacement-time curve is to be as indicated in Fig.(b).
Requirements: 1. Find the necessary stiffness and damping constants of the shock absorber if the damped period of vibration is to be 2s and the amplitude x1 is to be reduced to one-fourth in one half cycle (i.e. x1.5 = x1/4 ).
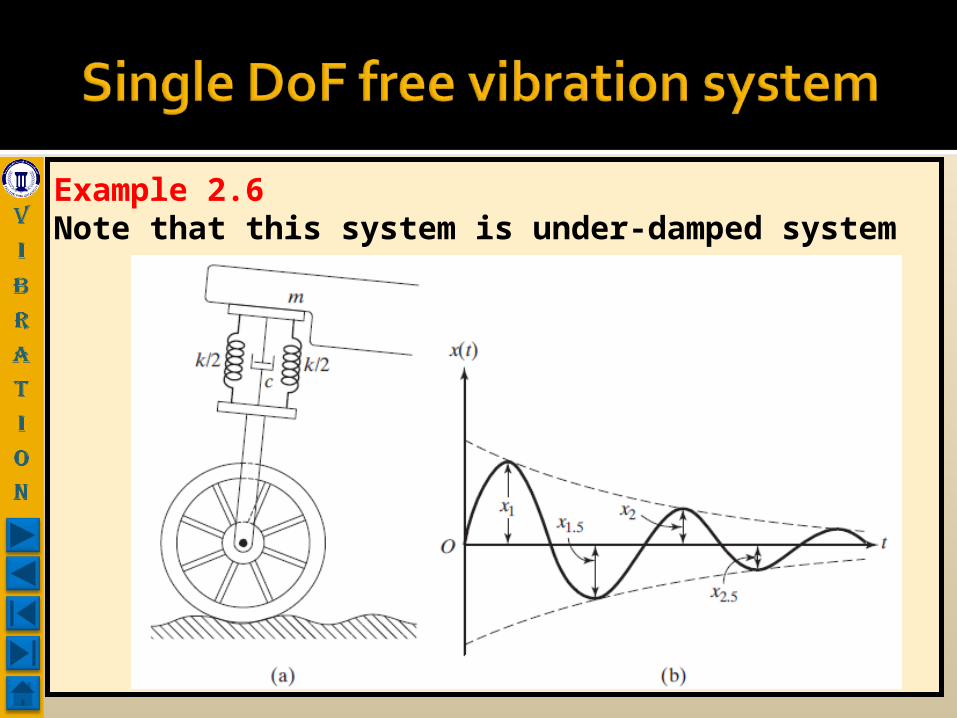
Example 2.6Note that this system is under-damped system
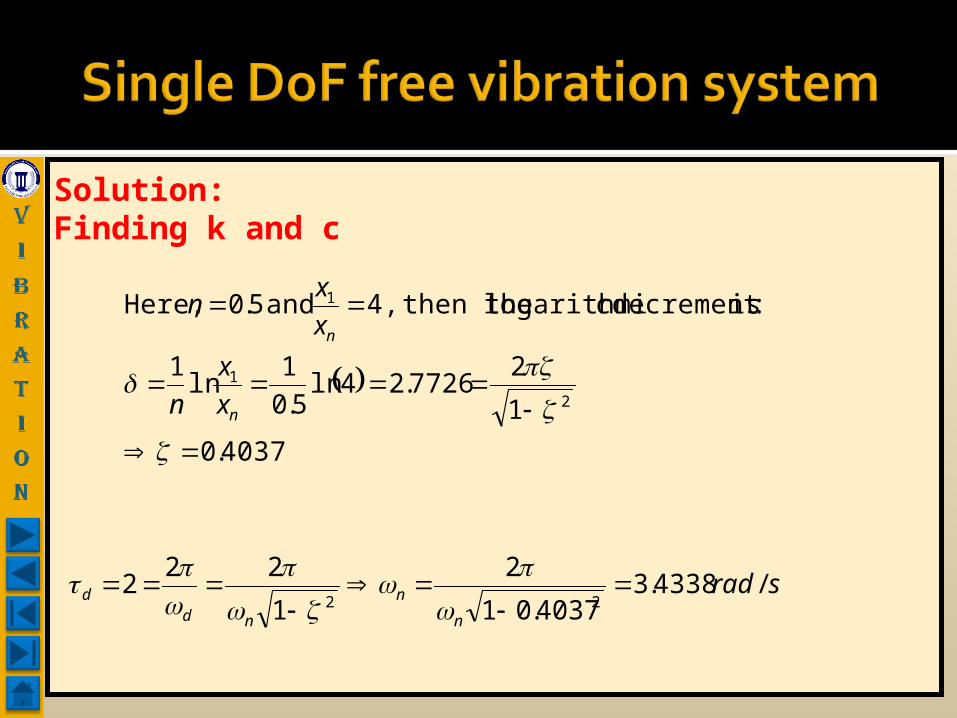
Solution:Finding k and c
4037.0
1
27726.24ln
5.0
1ln
1
:isdecrement clogarithmi then the4, and 5.0 Here,
2
1
1
n
n
x
x
n
x
xn
sradn
n
ndd / 4338.3
4037.01
2
1
222
22

The critical damping can be found as:
Damping coefficient C and stiffness K can be found as:
N.sec/m 54.13734338.320022 nc mc
.(Ans.)N/m....... 2652.23584338.3200 22 nmk
....(Ans.)N.sec/m... 4981.55454.13734037.0 ccc

End of chapter
Related Documents











