Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 1/97
Mechanical Design
Anne Bergeron
Mechanical Engineer
SAIC

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 2/97
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 3/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
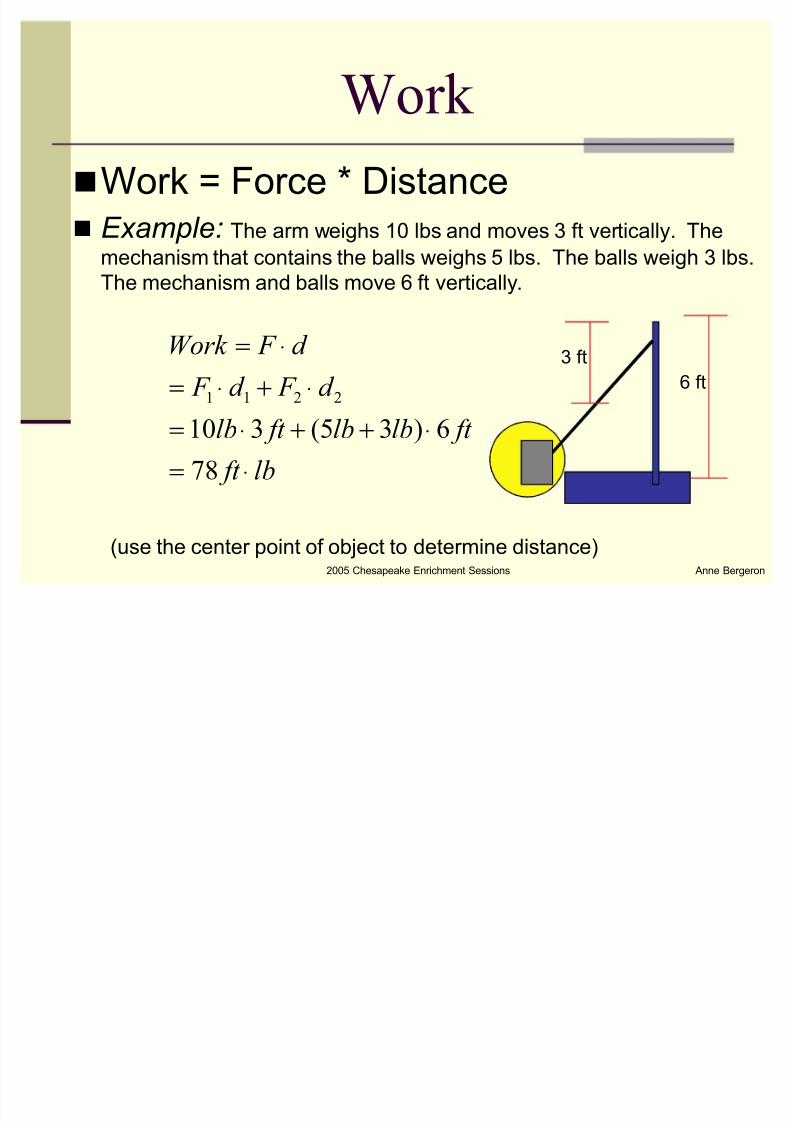
Work
Work = Force * Distance Example: The arm weighs 10 lbs and moves 3 ft vertically. The
mechanism that contains the balls weighs 5 lbs. The balls weigh 3 lbs.
The mechanism and balls move 6 ft vertically.
(use the center point of object to determine distance)
6 ft
3 ft
lb ft
ft lblb ft lb
d F d F
d F Work
!
!
!
!
78
6)35(310
2211

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 4/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Power
Power = Work / Time
= (Force * Distance) / Time
= Force * Velocity
= Torque * Angular Velocity
POWER IS LIMITED!!!!!
Example: Desire the motion to be completed in 3 seconds.
watts
lb ft
wattslb ft time
w
ork Pow
er
3.35
min
02259697.0
min
sec60
sec3
78/
!
!
!
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 5/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
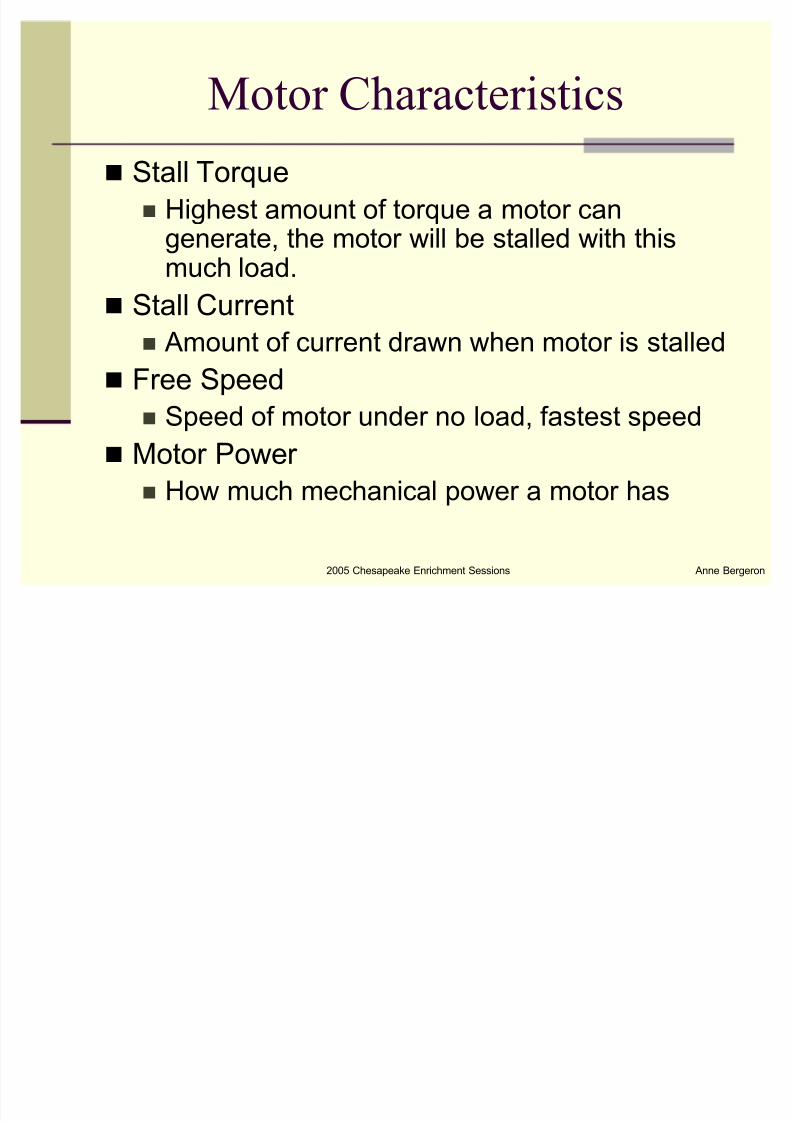
Motor Characteristics
Stall Torque
Highest amount of torque a motor cangenerate, the motor will be stalled with this
much load. Stall Current
Amount of current drawn when motor is stalled
Free Speed
Speed of motor under no load, fastest speed Motor Power
How much mechanical power a motor has

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 6/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Speed-Torque Cur ve
Speed
Stall Torque
(T0)
Free Speed
(Wf)
K (slope)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 7/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Current-Torque Cur ve
Torque
Max breaker
current
Max
Design
Torque
Stall current

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 8/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Power-Torque Cur ve
TorqueMax
design
torque
Max
Power
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 9/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
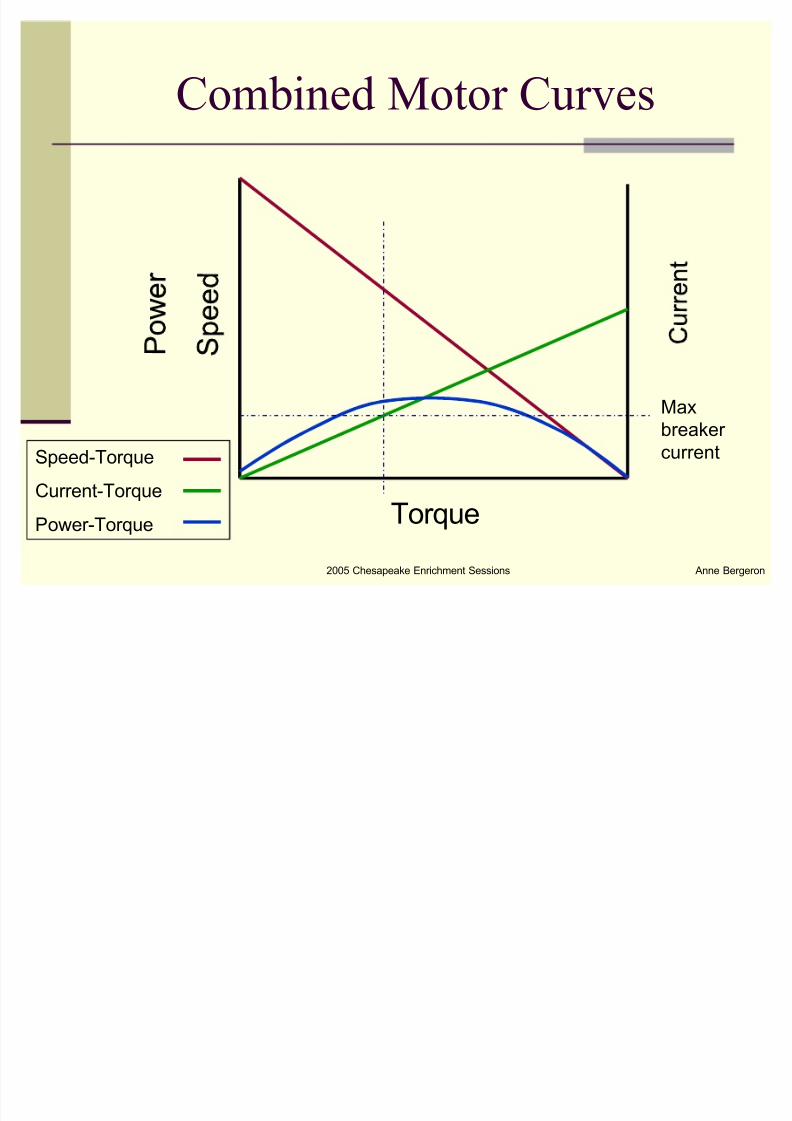
Combined Motor Cur ves
Torque
Speed-Torque
Current-Torque
Power-Torque
Maxbreaker
current

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 10/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Motor Equation
Use to get better
estimates from graph
Equation form: Y=mX+b
Calculate the slope, m:
Substitutions:
f f W
T
W
T
Y
X Slope 00
0
0 !
!
(
(!
Speed
T0
Wf
K
0T speed W
T Torque
f
o
!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 11/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Motor Exam ples
T0 Wf A0 Af Pmax T40 W40
N-m RPM Amps Amps Watts N-m RPM
Chiaphua 2.45 5,342 114 2.4 342.6 0.80 4,045
Johnson F-P 0.38 15,000 57 1.1 149.2 0.20 7,245
Bosch Drill 0.87 19,670 127 4.5 448.0 0.25 13,970
Motor
Motor Equations:
1. 2002-04 Chiaphua: T = (-2.45/5,342) * W + 2.45
2. 2003 Fisher-Price: T = (-0.38/15,000) * W + 0.38
3. 2003-04 Bosch Drill: T = (-0.87/19,670) * W + 0.87
0T speed W
T Torque
f
o
!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 12/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Figuring out gear ratios
Example: A robot is to be designed to have a top
speed of 8 ft/sec. The robot will have 4 wheels that
have a diameter of 8 in and will be using one CIM
motor for each pair of wheels. Find the needed gear ratio.

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 13/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ste p one: Gather inf o
Given:
Wheel diameter(d) = 8 in = 0.67 ft
Robot speed (V) = 8 ft/sec
Motor info:
CIM use a 40 amp breaker
Look at graphs or use formula to find
following: T40 = 0.80 N-m = 0.59 ft-lb
W40 = 4045 rpm

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 14/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ste p two: Find wheel revolutions
Find distance traveled per revolution of
wheel:
Get wheel revolution needed for desired
speed:
rev
ft d P Perimeter 104.2
2
2)( !! T
min12.228
sec802.3
104.2
sec8
)(
revrev
rev
ft
ft
P
V W Wheelspeed
w
!!
!
!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 15/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ste p 3: Find needed gear ratio
Find ratio to get speed of motor to speedrequired by wheel:
Motor speed (W40) = 4045 rpm
Required wheel speed = 228.12 rpm
This ratio can be achieved using one 17:1ratio or a combination of smaller steps.
Additional steps are multiplied.
17228
404540!!!
rp
rp
W
W ratio
w

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 16/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ste p 4: Calculate Force
Find the torque at the wheel:
Find force due to torque per wheel:
lb ft lb ft r atioT T w
!!! 03.101759.040
lb
in
ft in
lb ft R
F w
w 09.30
12
1403.10 !
!!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 17/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ste p 5: Pushing f orce
Get the wheel max friction force (=1) which isequal to the max contact force (weight):
Find torque needed for pushing force:
Greater than torque of motors so not pushingbot.
w pushing
pushing
pushing
pushing
lb ft
lb
in
ft in
F d
u
!
!
!
83.10
5.32
12
1
2
8
2max
lblb
n
weight F
wheels
5.32
4
130)1(max !!! Q

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 18/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
More possi bilities
The same procedure can also be followed using
Torque or Power as the starting points.
Can use the wanted pushing force as starting point
Helps to know the coefficient of friction
Iterations will be needed.
Multiply in efficiencies when # of stages determined
Recalculate with actual ratios This can also be used to calculate ratios for
manipulators as well.

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 19/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Gear Ty pes and Efficiency
Previous calculations were done under ideal
conditions.
Add efficiency in calculation by multiplying in
with ratio
Spur gears
Efficiency ~ 95% - 98%

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 20/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Gear Ty pes and Efficiency (cont.)
Chain and Sprockets
Efficiency ~ 95% - 98%
Belt and Pulley
Efficiency ~ 85%-98% (timing belt best)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 21/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Bevel Gears
Efficiency ~ 90% - 95%
Worm Gears
Efficiency ~ 40%-70%
Gear Ty pes and Efficiency (cont.)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 22/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ordering Gears
Remember clearances
Match
Pitch
Pressure angle Good Sources
McMaster Carr
Boston Gear
MSC
Pic-Design
Ord er ear ly!!!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 23/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ordering Wheels
Skyway Wheels (www.skywaywheels.com)
AndyMark (www.andymark.biz)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 24/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ty pical Drive Train
Co
nfigurat
io
ns 2 powered wheels, 2 castors

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 25/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ty pical Drive Train
Co
nfigurat
io
ns (co
nt
.) 4 wheels, several configurations:
4 motors
2 motors
2 gear boxes
2 powered wheels
4 powered wheels

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 26/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ty pical Drive Train
Co
nfigurat
io
ns (co
nt
.) Threads

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 27/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ty pical Drive Train
Co
nfigurat
io
ns (co
nt
.) 2 centered wheels

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 28/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ty pical Drive Train
Co
nfigurat
io
ns (co
nt
.) Swerve
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 29/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
A ppendages
Articulating Arms
Telescoping Lifts
Grippers
Latches
Accumulators

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 30/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Design
³ Arm´: device for grabbing & moving objects using
members that rotate about their ends
Thin Walled Tubing (1/16) is your friend
Every Pivot has to be engineered reduce, reuse, recycle ;-)
Pivots on Pivots are confusing to drivers
4 bars linkages help control end of arm
Think about operator interface ± very important
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 31/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Advice
Don¶t make it over-complicated
Feedback Control is HUGE
Measure Current Position (potentiometers)
Set Desired Position
Calculate Error
Take Action Based on Error (Search Internet
for P
ID control) Install limits
Design-in sensors from the start of design
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 32/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
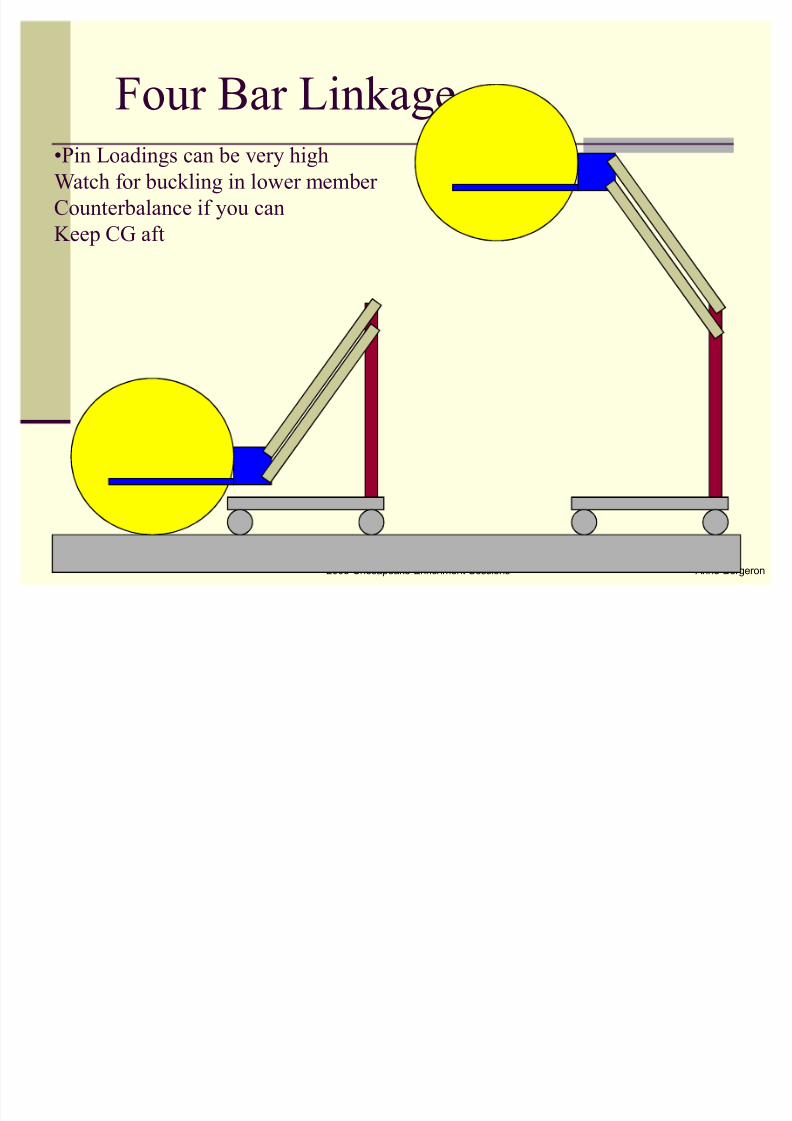
Four Bar LinkagePin Loadings can be very high
Watch f or buckling in lower member
Counter balance if you can
Kee p CG af t

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 33/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Exam ple: 67 in 2001

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 34/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Exam ple: 234 in 2001

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 35/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Exam ple: 71 in 2004
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 36/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
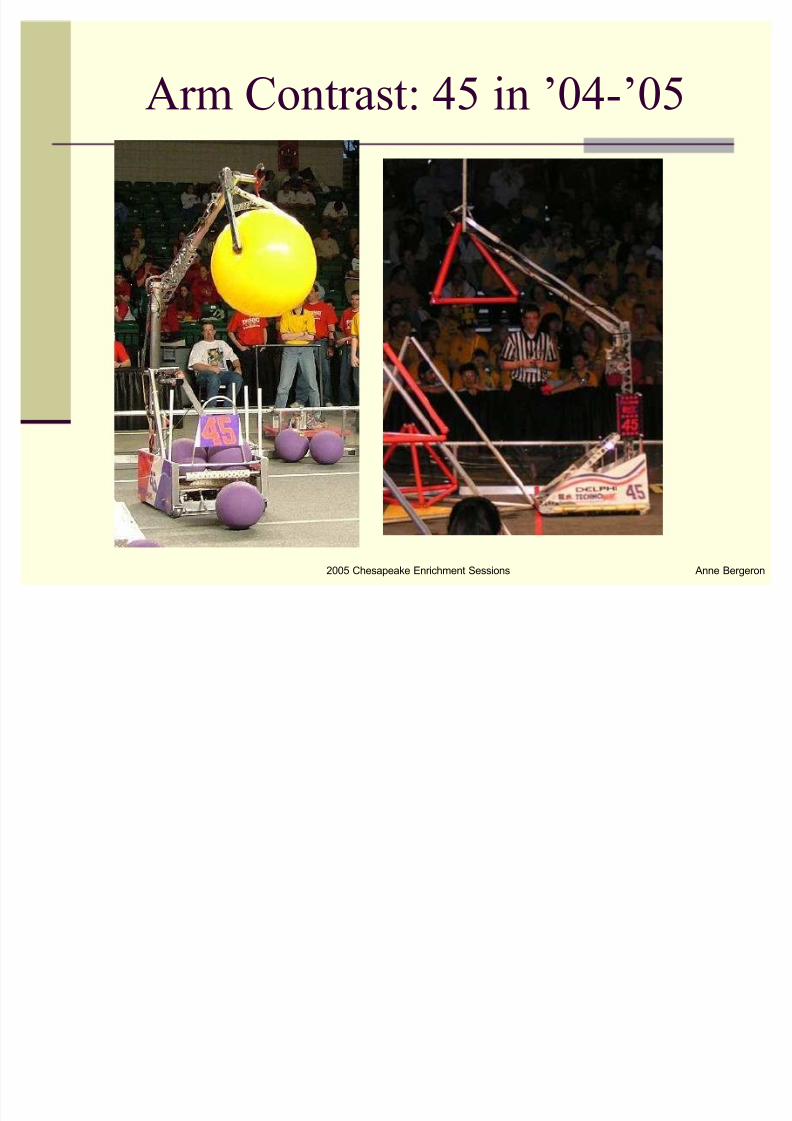
Ar m Contrast: 45 in ¶04-¶05
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 37/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m Exam ple: 330 in 2005
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 38/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Telesco ping Lif ts
Extension Lift
Scissor Lift

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 39/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Extension
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 40/97

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 41/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Extension - Rigging
Continuous Cascade
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 42/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
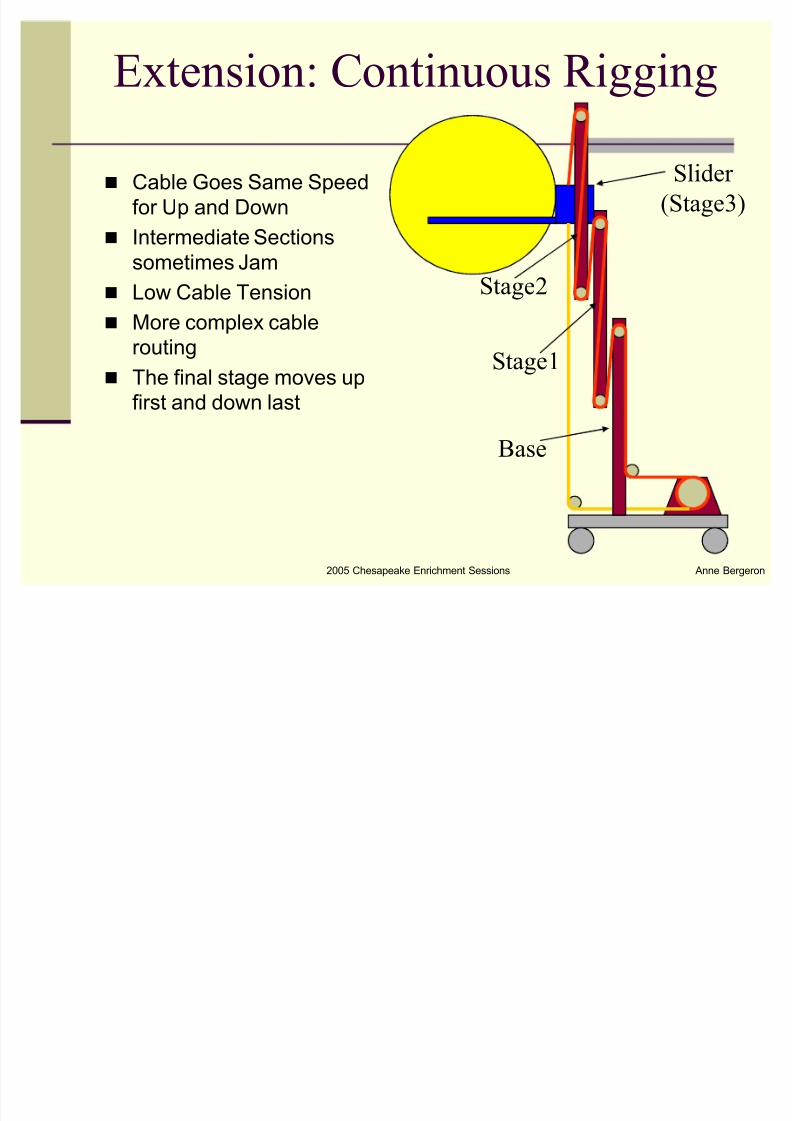
Extension: Continuous Rigging
Cable Goes Same Speed
for Up and Down
Intermediate Sections
sometimes Jam
Low Cable Tension
More complex cable
routing
The final stage moves up
first and down last
Slider
(Stage3)
Stage2
Stage1
Base

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 43/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Extension: Continuous Internal Rigging
Even More complex cable
routing
Cleaner and protected
cables
Slider
(Stage3)
Stage2
Stage1
Base

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 44/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Extension: Cascade Rigging
Up-going and Down-goingCables Have DifferentSpeeds
Different Cable Speeds Canbe Handled with Different
Drum Diameters or MultiplePulleys
Intermediate Sections Don¶tJam
Much More Tension on thelower stage cables
Needs lower gearing todeal with higher forces
I do not prefer this one!
Slider
(Stage3)
Stage2
Stage1
Base

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 45/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Lif t Exam ple 111 (1997)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 46/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Lif t Exam ple 213 (2001)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 47/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Scissor Lif t
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 48/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
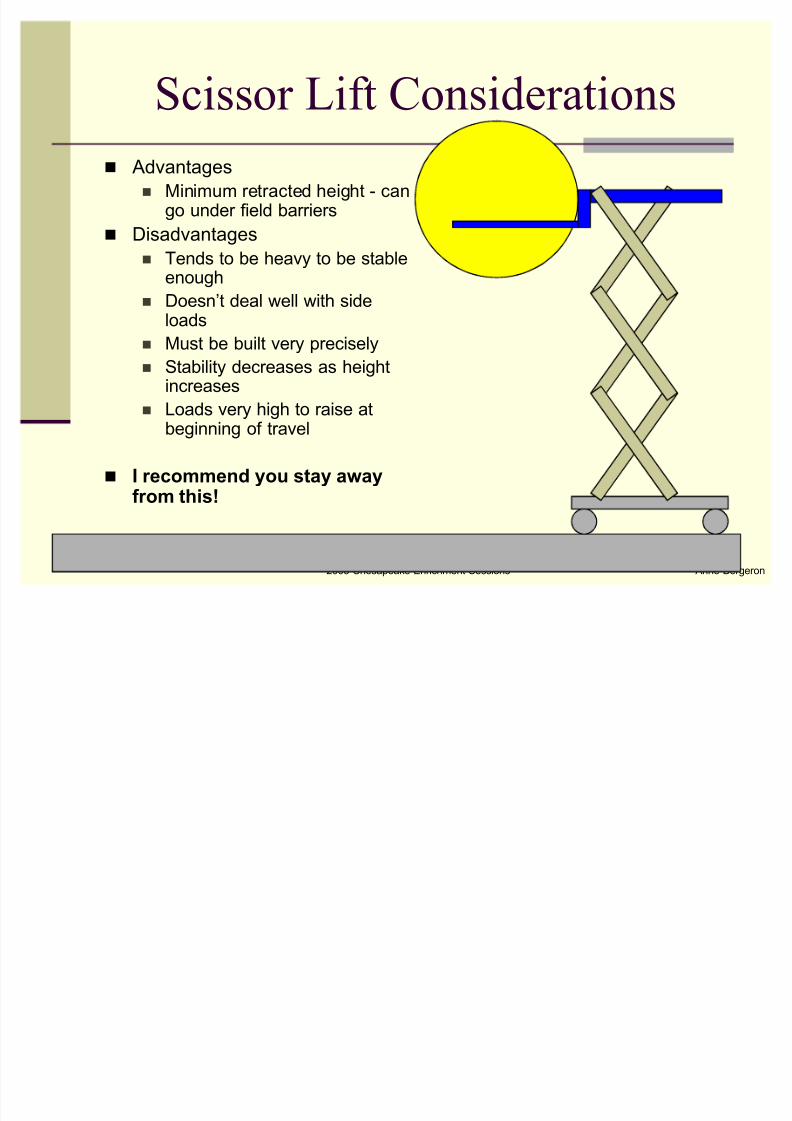
Scissor Lif t Considerations
Advantages
Minimum retracted height - cango under field barriers
Disadvantages
Tends to be heavy to be stable
enough Doesn¶t deal well with side
loads
Must be built very precisely
Stability decreases as heightincreases
Loads very high to raise atbeginning of travel
I recommend you stay awayfrom this!

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 49/97

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 50/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Ar m vs. Lif t
Feature Arm Lift
Reach over object Yes No
Fall over, get back up Yes, if strong enough No
Go under barriers Yes, fold down No, limits lift potential
Center of gravity (Cg) Can move it out from
over robot
Much mass, but central
Confided space operation No, needs swing room Yes
How high? More articulations, more
height (difficult)
More lift sections, more
height (easier)
Complexity Moderate High
Accumulation 1 or 2 at a time Many objects
Combination Insert 1-stage lift at
bottom of arm

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 51/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Braking: Prevent Back-driving
Ratchet Device - completely lock in one direction in discrete
increments - such as used in many winches
Clutch Bearing - completely lock in one direction
Brake pads - simple device that squeezes on a rotating device
to stop motion - can lock in both directions Disc brakes - like those on your car
Gear brakes - applied to lowest torque gear in gearbox
Note : any gearbox that cannot be back-driven is probably very
inefficient
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 52/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Power
Summary
All motors can lift the same amount (assuming
100% power transfer efficiencies) - they just
do it at different rates BUT, no power transfer mechanisms are
100% efficient
Inefficiencies (friction losses, binding, etc.)
Design in a Safety Factor (2x, 4x)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 53/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Gri ppers
Gripper = grabbing game object
How to grip
How to hang on
Speed
Control

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 54/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
How to gri p
Pneumatic linkage grip
1 axis
2 axis
Motorized grip Roller grip
Hoop grip
Pneumatic grip

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 55/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pneumatic linear gri p
Pneumatic
Cylinder
extends &
retracts
linkage to
open and
close gripper
254 robot:
2004, 1-axis
968 robot:
2004, 1-axis
Recommended

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 56/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pneumatic linear gri p
Pneumatic
Cylinder,
pulling 3fingers for a
2-axis grip
60 in 2004
Recommended

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 57/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Motorized Linear Gri p
Slow
More complex
(gearing)
Heavier Doesn¶t use
pneumatics
49 in 2001
Notrecommended

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 58/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
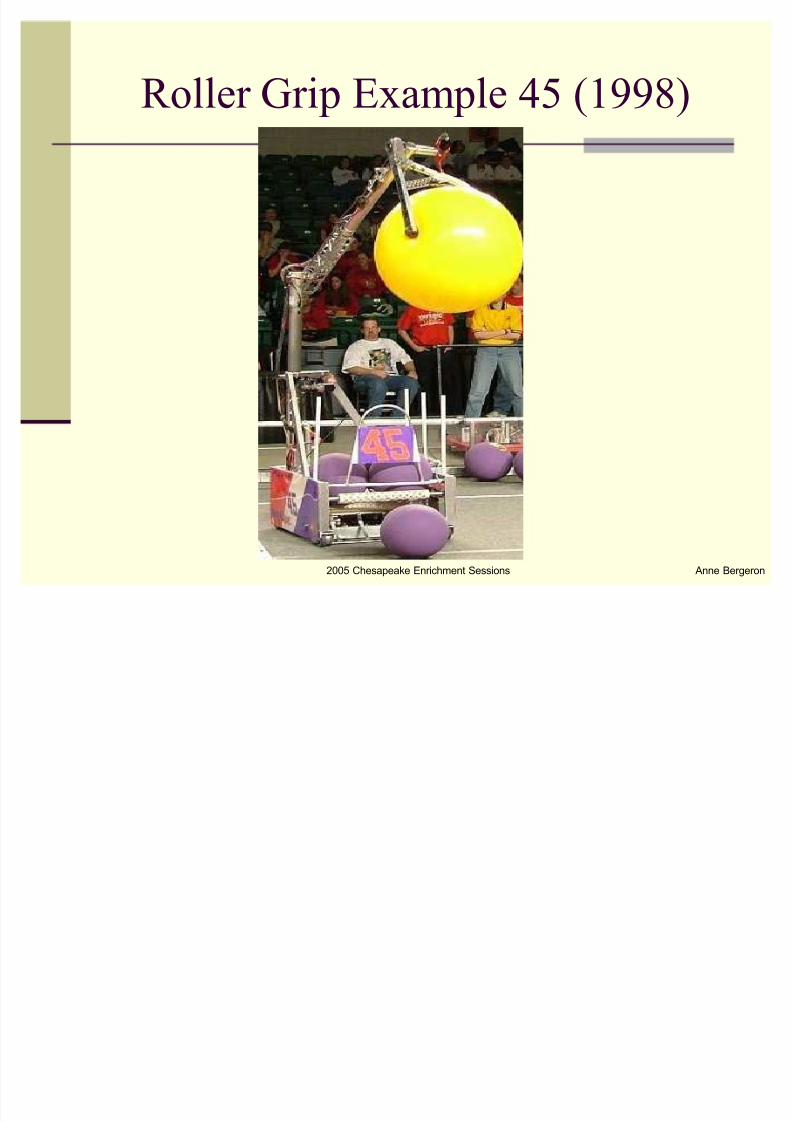
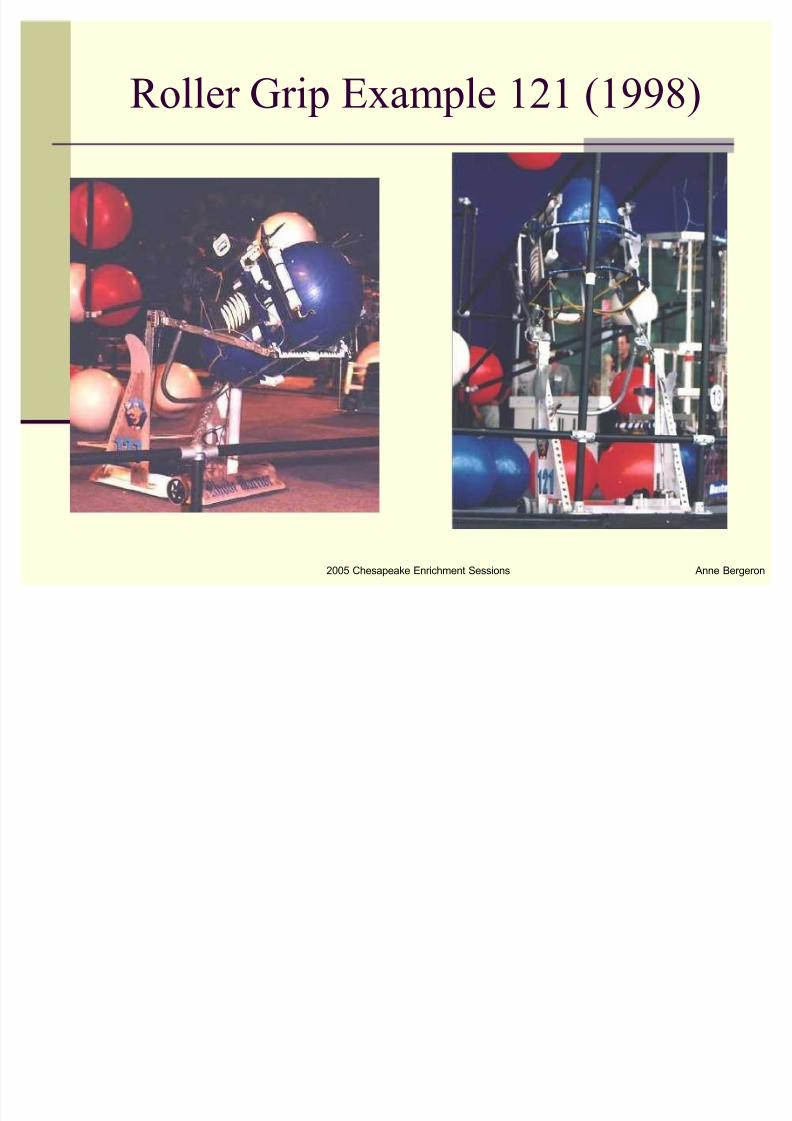
R oller Gri p
Slow
Allows for
misalignment
when grabbing
Won¶t let go
Extends object as
releasing
Simple
mechanism
45 in 98 and 2004
Recommended
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 59/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
R oller Gri p Exam ple 45 (1998)
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 60/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
R oller Gri p Exam ple 121 (1998)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 61/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Hoo p gri p
Slow
Needs
aligned
Can¶t hold onwell
5 in 2000
Not
recommended

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 62/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pneumatic Gri p
Vacuum:
generator &cups to grab
Slow
Not secure
Not easy tocontrol
Simple
ProblematicNot
recommended
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 63/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Hang on!
Friction: High is needed (over 1.0 mu)
Rubber, neoprene, silicone, sandpaper
Force: Highest at grip point
Force = multiple x object weight (2-4x)
Linkage, toggle: mechanical advantage
Extra axis of grip = More control
Best grip = roller gripper

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 64/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Speed
Quickness covers mistakes
Quick to grab
Drop & re-grab
292 example
Fast
Pneumatic gripper
Not fast Roller, motor gripper, vacuum

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 65/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Gri p contr ol
Holy grail of gripping:
Get object fast
Hang on
Let go quickly
This must be done under excellent control
Limit switches
Auto-functions Ease of operation

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 66/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Latches
Spring latches
Hooks / spears
Speed & Control

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 67/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Latch exam ple: 267
Pneumatic Latch
2001 game
Grabs pipe
No ³smart
mechanism´

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 68/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Latch exam ple: 469
Spring-loaded
latch
Motorized
release
Smart
Mechanism
2003
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 69/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
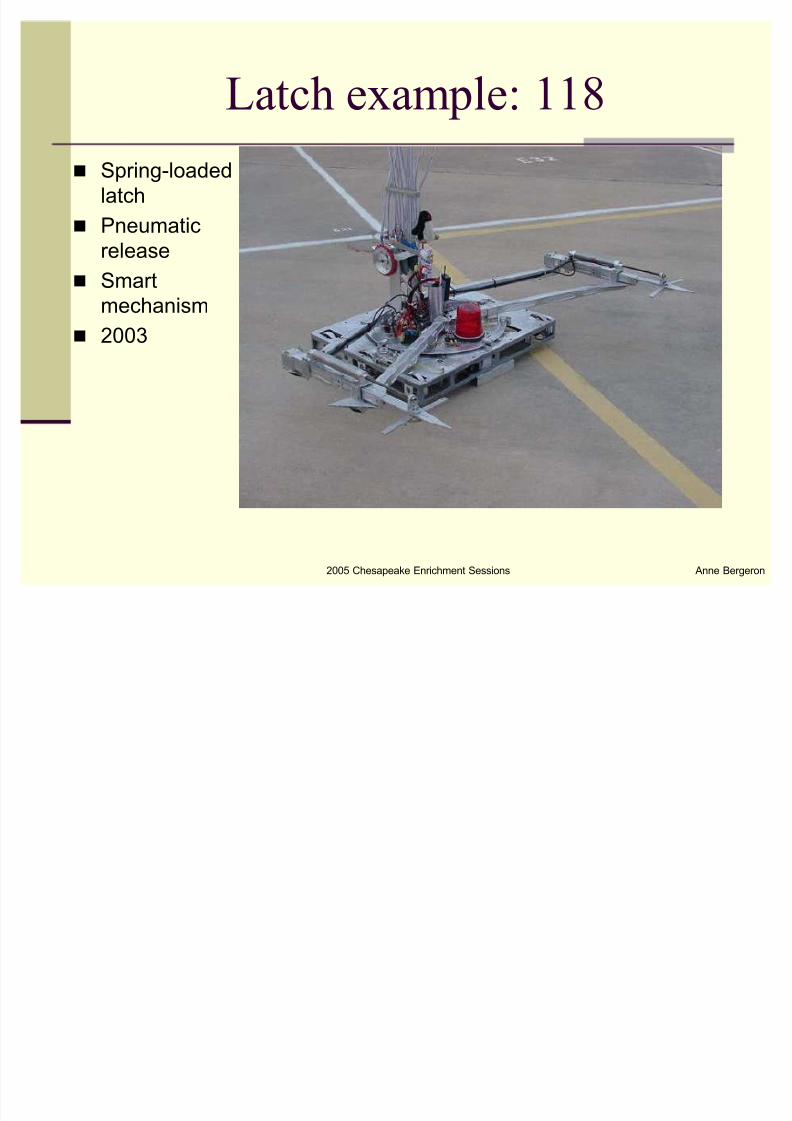
Latch exam ple: 118
Spring-loaded
latch
Pneumatic
release
Smartmechanism
2003

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 70/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Latching advice
Don¶t depend on operator to latch, use asmart mechanism
Spring loaded (preferred)
Sensor met and automatic command given Have a secure latch
Use an operated mechanism to let go
Be able to let go quickly
Pneumatic lever Motorized winch, pulling a string
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 71/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Accumulation
Accumulator = rotational device that pulls objects in
Types:
Horizontal tubes - best for gathering balls from floor or
platforms
Vertical tubes - best for sucking or pushing balls between
vertical goal pipes
Wheels - best for big objects where alignment is pre-
determined
When it comes to gathering balls, there is nothing
more efficient
If set up in the proper orientation, will not knock the ball
away, just suck it in

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 72/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Conveying & Gathering
Conveyor - device for moving multiple objects,typically within your robot
Types:
Continuous Belts
Best to use 2 running at same speed to avoid jamming Individual Rollers
best for sticky balls that will usually jam on belts andeach other
When it comes to gathering balls, there is nothing
more efficient If set up in the proper orientation, will not knock the ball
away, just suck it in

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 73/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Conveyors
Why do balls jam on belts?
- Sticky and ru b against each
other as they try to r otate
along the conveyor
Solution #1- Use individual r ollers
- Adds weight and com plexity
Solution #2
- Use pairs of belts
- Increases size and com plexity
Solution #3
- Use a sli ppery material f or the non-
moving surface (Teflon sheet works
great)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 74/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
R oller exam ple: 111

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 75/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Accumulator exam ple: 173 & 47

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 76/97
Pneumatics

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 77/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pneumatics vs. MotorsSome, but not all im por tant differences
Cylinders use up their power source rather quickly
the 2 air tanks we are allowed do not hold much
Motors use up very little of the total capacity of the battery
Cylinders are great for quick actuations that transition to largeforces
Motors have to be geared for the largest forces Our ability to control the position of mechanisms actuated by
cylinders is very limited
We are not given dynamic airflow or pressure controls
We are given much more versatile electronic controls for motors
Since air is compressible, cylinders have built-in shockabsorption
Cylinders used with 1-way valves are great for Armageddondevices - stuff happens when power is shut off
This could be good or bad - use wisely

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 78/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Com ponents
Compressor
Pressure gages
Helps diagnose
problems
Cylinders
custom sizes
Flow controls
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 79/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
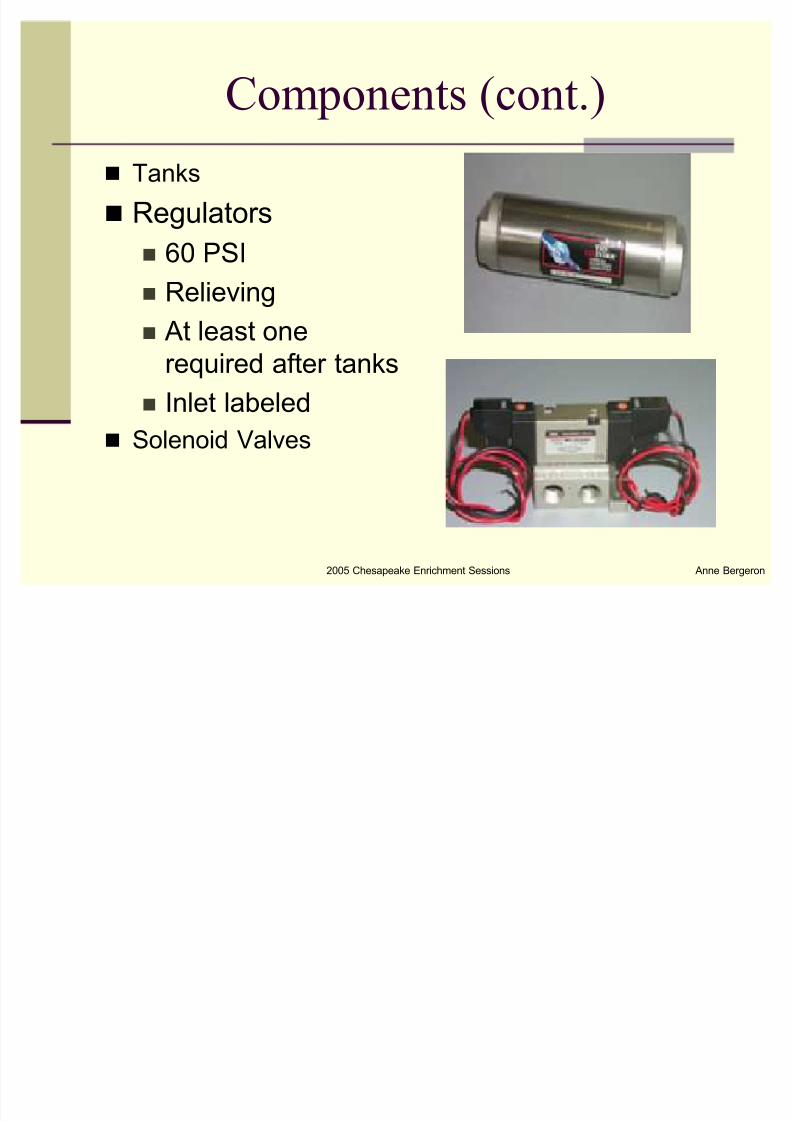
Com ponents (cont.)
Tanks
Regulators
60 PSI
Relieving At least one
required after tanks
Inlet labeled
Solenoid Valves

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 80/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Fittings
Flow Control
Plug Valve

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 81/97
Com pressor
Gage
Regulator
Valve
Tank
Tank Relay
Contr ol
System
Fuse
Box
Piston

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 82/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Layout of Test Board
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 83/97

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 84/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Wiring Solenoids
Single Solenoid
Connect the red to M+ of relay
Connect the black to M- of relay
Double Solenoid (as two singles)
Double Solenoid+
-
Single Solenoid
M+
M-
Single Solenoid

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 85/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Dou ble Solenoid
Double Solenoid
M+ M-
Double Solenoid
M+
M- M-
M+

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 86/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pistons
Several sizes available
Bore sizes: ¾´, 1 ½´, 2´
Stroke Lengths: ½´ to 12´
Force= Pressure * Area
Stroke length
Stroke Length
Bore
Size

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 87/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Forces

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 88/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Basic Mechanical Ti ps
Know your limitations Machining
Design
KISS
Keep track of weight Spreadsheet
Estimates and actuals
Include materials
Have 5-10 pound buffer
Assign per subsystem
Get a good scale Think about maintenance during design
Access to parts
Determine high maintenance parts

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 89/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Keep the center of gravity low
Battery/Compressor
Wheel Base
Prototype ideas
Create design drawings
2D or 3D
CAD or paper
Keep at building site
Standardize hardware
Metric or standard
1-2 Sizes (1/4´-20, 10-32)
Lots of lengths
Basic Mechanical Ti ps (cont.)

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 90/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Basic Mechanical Ti ps (cont.)
Avoid set screws
Too much traction can be bad
Be aware of robot systems when drilling or
machining parts on the robot Avoid cantilevered shafts
Avoid stalling your motors
Use the right tool for the job
Key
Pin
Screw
Screw
Shaft

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 91/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Basic Mechanical Ti ps (cont.)
Make spares
Get a base and drive train done quickly
Don¶t forget about pneumatics

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 92/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Structural Material
Metals
Iron
Steel
Aluminum
Forms
Extruded
Plating
Angle
Tubing Circular
Square
Wood
Fiberglass
Lexan (no Plexiglass)
Carbon fiber

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 93/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Pr ofiles
Angle: 1´x1´ 1/8´ thick
Square:
1´x1´
1/16´
t
hick Same weight, much more strength and stiffness
Takes more s pace
Extruded: 1´x1´ 1/16´
thick
Heavier, much more strength and stiffness
Takes more s pace
Easy to assemble and connect to

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 94/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Extruded
Item America www.itemamerica.com
80/20 www.8020.net
Bosh www.boschrextroth.com IPS www.industrialprofile.com

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 95/97
Questions?Thanks to:
Andy Baker (45)
Chris Hussman (330)
Joe Johnson (47)
Raul Olivera (111)www.chiefdelphi.com
www.firstrobotics.net
www.firstrobotics.uwaterloo.ca

8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 96/97
Anne Bergeron2005 Chesapeake Enrichment Sessions
Activity
The Task:
Design a robot drive train using AndyMark
gearbox.
Specifications:
Robot Speed= 8 ft/sec
Use 4 Chiaphua motors (Chip) Weight of robot=130 lbs
8/8/2019 Mechanical Design Final
http://slidepdf.com/reader/full/mechanical-design-final 97/97
Ste ps
Decide on a wheel size
Find gear ratio needed from gearbox towheels
Calculate the pushing force of robot
Is it a pushing robot?
Conversion factors: 1 oz-in = 0.0052083 pound foot
Related Documents