Mechanical design and construction of a device to harvest and select strawberries Daniel Felipe Herrera-Guillen (1,a)*, Luisa María Medina-Barragán (2,a) , Miguel José Delgado-Gutiérrez (3,a) , Jennifer Paola Corredor-Gómez (4,a) a. Semillero en Agricultura de Precisión. Universidad Piloto de Colombia - Sede Bogotá, Facultad de Ingeniería, Ingeniería Mecatrónica. Carrera 9 No. 45A - 44, Bogotá. 1. [email protected] 2. [email protected] 3. [email protected] 4. [email protected] -Resumen- El cultivo de fresas en Colombia se encuentra localizado en su mayor parte en Cundinamarca, correspondiente al 53.1 % en comparación con las demás regiones del país, a partir de esto surge la necesidad de mejorar la producción con la ayuda de la tecnología. En este documento se presentará el diseño mecánico de un dispositivo recolector y clasificador de fresas. Se tuvieron en cuenta varios parámetros para garantizar su correcto funcionamiento; se analizó a fatiga mecánica el sistema propuesto, Además, se realizó una selección de materiales, por el método de Ashby, acorde a las necesidades de funcionamiento según las condiciones de uso del prototipo. Un tercer elemento que se tuvo en cuenta, es la selección del proceso de fabricación, considerando que el diseño permitiera el fácil ensamble y desensamble, la idea es tener piezas que se puedan reemplazar fácilmente en caso de necesitar un cambio y adicionalmente para facilitar el mantenimiento del dispositivo. Con esta visión de diseño se llevó a cabo la implementación del prototipo funcional. Al realizar la evaluación del dispositivo, de las fresas en la planta se identificó en el 100% de los casos que cumplían con las características de madurez, sin embargo, en la fase de recolección, sólo se cosecharon el 70% de las fresas identificadas. Palabras Clave: Agricultura de precisión; fresa; cosecha; robots autónomos; diseño mecánico Abstract— The major part of the strawberry farming in Colombia is found in Cundinamarca, corresponding to a 53.1% in comparison with other regions of the country. For that reason, this project was thought with the purpose of improving strawberries production, using technology as a basis of action. In this document, it will be introduced a mechanical design of a device to harvest and select strawberries. In this design, there are several parameters that were taken into account for the correct performance of this device. It was analyzed through mechanical calculations to ensure no failures by fatigue or due to bending loads. Also, the selection of materials was realized by the method of Ashby, according to the needs of operation is performed taking into consideration the prototype use- time. A third element that was considered, was the selection of the manufacture process, being thought a design that would allow the assembly and disassembly. The idea, is to have parts that can be replaced easily in case for the need of a modification. With this design vision, it was carried out the implementation of the functional prototype. When evaluating the device, the strawberries in the plant were identified in a 100% of the cases that met the ripeness characteristics, however, in the gathering phase, only the 70% of the identified strawberries were harvested. Keywords— Precision Farming;Strawberry Harvesting ;Autonomous Robots ;Material Selection ;Process Selection. I. INTRODUCCIÓN El cultivo de fresas es uno de los más importantes en nuestro país. Teniendo un alto nivel de productividad, lo cual se ve reflejado en el aumento de exportaciones en los últimos años. En 2014, las exportaciones cerraron en US$ 204,8 millones y 193.402 toneladas [16]. Colombia es uno de los países de mayor producción de fresas junto con países como: Estados Unidos, Turquía, España y Egipto [1]. A nivel nacional la producción de este cultivo está en su mayor parte en el departamento de Cundinamarca con un 53,1% aproximadamente, seguido por Antioquia con 29,6%, Norte de Santander con 7,9%, Cauca con 6,6%, Boyacá con 1,3% y Valle del Cauca con 0,6% [1]. El proyecto se enfoca en las necesidades de los cultivos a nivel local, para procesos más rápidos en la recolección y un aumento de la productividad. Este artículo se centra en el diseño mecánico, que tiene como objetivo principal garantizar el buen funcionamiento y estética del dispositivo; cumpliendo con las especificaciones de diseño mecánico y de construcción propuestas. Relacionados a las condiciones del terreno y el

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Mechanical design and construction of a device to harvest and select
strawberries
Daniel Felipe Herrera-Guillen (1,a)*, Luisa María Medina-Barragán (2,a), Miguel José Delgado-Gutiérrez (3,a),
Jennifer Paola Corredor-Gómez(4,a)
a. Semillero en Agricultura de Precisión. Universidad Piloto de Colombia - Sede Bogotá, Facultad de Ingeniería,
Ingeniería Mecatrónica. Carrera 9 No. 45A - 44, Bogotá.
-Resumen- El cultivo de fresas en Colombia se encuentra
localizado en su mayor parte en Cundinamarca,
correspondiente al 53.1 % en comparación con las demás
regiones del país, a partir de esto surge la necesidad de
mejorar la producción con la ayuda de la tecnología. En este
documento se presentará el diseño mecánico de un
dispositivo recolector y clasificador de fresas. Se tuvieron en
cuenta varios parámetros para garantizar su correcto
funcionamiento; se analizó a fatiga mecánica el sistema
propuesto, Además, se realizó una selección de materiales,
por el método de Ashby, acorde a las necesidades de
funcionamiento según las condiciones de uso del prototipo.
Un tercer elemento que se tuvo en cuenta, es la selección del
proceso de fabricación, considerando que el diseño
permitiera el fácil ensamble y desensamble, la idea es tener
piezas que se puedan reemplazar fácilmente en caso de
necesitar un cambio y adicionalmente para facilitar el
mantenimiento del dispositivo. Con esta visión de diseño se
llevó a cabo la implementación del prototipo funcional.
Al realizar la evaluación del dispositivo, de las fresas en la
planta se identificó en el 100% de los casos que cumplían
con las características de madurez, sin embargo, en la fase
de recolección, sólo se cosecharon el 70% de las fresas
identificadas.
Palabras Clave: Agricultura de precisión; fresa; cosecha;
robots autónomos; diseño mecánico
Abstract— The major part of the strawberry farming in
Colombia is found in Cundinamarca, corresponding to a
53.1% in comparison with other regions of the country. For
that reason, this project was thought with the purpose of
improving strawberries production, using technology as a
basis of action. In this document, it will be introduced a
mechanical design of a device to harvest and select
strawberries. In this design, there are several parameters
that were taken into account for the correct performance of
this device. It was analyzed through mechanical
calculations to ensure no failures by fatigue or due to
bending loads. Also, the selection of materials was realized
by the method of Ashby, according to the needs of operation
is performed taking into consideration the prototype use-
time. A third element that was considered, was the selection
of the manufacture process, being thought a design that
would allow the assembly and disassembly. The idea, is to
have parts that can be replaced easily in case for the need of
a modification. With this design vision, it was carried out
the implementation of the functional prototype.
When evaluating the device, the strawberries in the
plant were identified in a 100% of the cases that met the
ripeness characteristics, however, in the gathering phase,
only the 70% of the identified strawberries were harvested.
Keywords— Precision Farming;Strawberry Harvesting
;Autonomous Robots ;Material Selection ;Process Selection.
I. INTRODUCCIÓN
El cultivo de fresas es uno de los más importantes en nuestro
país. Teniendo un alto nivel de productividad, lo cual se ve
reflejado en el aumento de exportaciones en los últimos años.
En 2014, las exportaciones cerraron en US$ 204,8 millones y
193.402 toneladas [16]. Colombia es uno de los países de mayor
producción de fresas junto con países como: Estados Unidos,
Turquía, España y Egipto [1].
A nivel nacional la producción de este cultivo está en su mayor
parte en el departamento de Cundinamarca con un 53,1%
aproximadamente, seguido por Antioquia con 29,6%, Norte de
Santander con 7,9%, Cauca con 6,6%, Boyacá con 1,3% y Valle
del Cauca con 0,6% [1].
El proyecto se enfoca en las necesidades de los cultivos a nivel
local, para procesos más rápidos en la recolección y un aumento
de la productividad. Este artículo se centra en el diseño
mecánico, que tiene como objetivo principal garantizar el buen
funcionamiento y estética del dispositivo; cumpliendo con las
especificaciones de diseño mecánico y de construcción
propuestas. Relacionados a las condiciones del terreno y el

espacio con el que se cuenta entre un surco y otro. Con esto se
busca apoyar el desarrollo de la agricultura de precisión
enfocándose en las necesidades del cultivo de fresa.
La agricultura de precisión está definida como una
‘Consecuencia de la irrupción de las TIC en la agricultura, es
decir, la manifestación de la era digital en la Producción Agraria’ [5]. En la Agricultura se tienen diferentes tecnologías
de aplicación lo cual busca la integración de la tecnología con
el campo. Trayendo grandes beneficios al aumentar el
rendimiento en algún o varios procesos de producción.
II. MATERIALES Y MÉTODOS
En el desarrollo del proyecto se tuvieron en cuenta diferentes
aspectos. En general cuando se aborda un proyecto se debe
realizar una exhaustiva investigación del problema a resolver.
Este dispositivo tiene unos parámetros generales para el diseño,
los cuales son:
- Rango para tomar la fresa.
- Ancho de la fresa
- Espacio entre los surcos del cultivo
- Tiempo de duración, entre otros.
Por tanto, se realizaron los siguientes pasos en el diseño
mecánico, con el fin de garantizar su correcto funcionamiento.
Estos se describen en la tabla 1.
Tabla 1 ‘Método para seleccionar un material.’
A. Selección de Materiales:
En el proceso de selección del material, se analizó cada sección
del dispositivo de acuerdo a su función. Dentro de las cuales se
encuentran:
-Agarre del Fruto
-Agarre al suelo ante la presencia de humedad.
-Soportar el peso generado por el dispositivo.
En cada caso se consideraron el objetivo, restricciones y
variables libres para el diseño, para establecer una función
objetivo:
𝑚 = 2√𝜋
3(𝑘
12⁄ ) (𝑙
52⁄ ) (
𝑝
𝐸1
2⁄) 𝐸𝑐. 1
En este caso cada eslabón del brazo se toma como una viga, por
tanto:
k: Rigidez de la viga
l: Longitud de la viga
p: densidad del material
E: Modulo de Young
m: masa
Partiendo de la función objetivo (Ec.1.) se escoge
adecuadamente el material de acuerdo a sus propiedades. El
índice de desempeño de la ecuación 1 se conforma de las
propiedades que caracterizan el material, que en este caso son
densidad y módulo elástico 𝑝 𝑦 𝐸.
Se requiere minimizar la densidad con el fin de que las piezas
tengan un peso y esfuerzos reducidos ya que esto genera fallas
en la estructura.
De acuerdo a esto se establecieron las siguientes restricciones.
Restricciones:
Densidad: 1 − 2𝑘𝑔
𝑚3
Módulo de Young: 2.5-4 GPa
Sin conductividad eléctrica.
Resistencia a la Corrosión
No poroso
Módulo de Young: 2.5-4 GPa
Costo Moderado 1-3
Se deje moldear al calentarlo.
Para escoger la familia del material se analizó respecto a la
figura 1. De acuerdo a esto los materiales posibles inicialmente
sería algún tipo de madera o polímero. Conforme al diseño, ya
que se diseñó piezas tridimensionales, se requería de un
material que se pudiera moldear para fabricar las únicas piezas
necesarias en el dispositivo, al tener la madera como proceso de
mecanizado más rápido el corte laser bidimensional, se descartó
como posible material a utilizar. Se seleccionó el polímero ya
que al ser utilizando en una impresora 3D, se puede realizar el
proceso aditivo el cual consiste en extruir el polímero y en base
a un modelo digital va generando capas las cuales forman un
sólido. Una vez seleccionado la familia de materiales se pasó a
Pro
ceso
de
Dis
eño
Necesidad Establecer un material que cumpla
con las condiciones de diseño del
dispositivo.
Concepto Bajo las condiciones de diseño se
analizará a profundidad la familia de
los polímeros de acuerdo a la
limitante de presupuesto, y
cumpliendo con los parámetros para
que este no falle.
Detalle -Baja densidad
-Moldeo rápido
-Dieléctrico
-Impermeable
-Fácil limpieza
P
roce
so d
e V
ida
Producción -Se realiza por medio de un
prototipado rápido, el cual permite la
construcción de formas irregulares a
un costo relativamente bajo.
Uso -Diseñado para soportar ambientes
húmedos. El cual debe ser de una
fácil higiene para no dañar el
producto (fresas) al manipularlo.
Desecho -Se busca un material biodegradable
que sea lo suficientemente resistente,
sin generar daños en el ambiente.

escoger el polímero (Figura 2). El material seleccionado es PLA
(Ácido poliláctico), de acuerdo a los cálculos descritos en la
figura 3.
Figura 1 Adaptación del libro de Diseño en Ingeniería
Mecánica [18]
Figura 2 Adaptación del libro de Diseño en Ingeniería
Mecánica [18]
Figura 3 ‘Cálculo del material’
Estableciendo el material. Se presentan los datos base de este
en la Tabla 2.
Familia Polímeros
Tipo Termoplásticos
Clase PLA
Atributos -Permite la deformación
-Biodegradable
-Menor tendencia a la deformación
- Polímero permanente e inodoro
-Es claro y brillante como el poliestireno
-Resistente a la humedad y a la grasa
Tabla 2 ‘Características del PLA’
B. Selección de Procesos:
Después de establecer el material de construcción para la
elaboración de las piezas y conociendo a la familia del material
a la cual pertenece, se procede a determinar el proceso de
fabricación por medio de la tabla 3. Investigando los diferentes
procesos de fabricación se optó por la impresión 3D ya que
ofrecía un mejor resultado de bajo costo en comparación de
otros procesos para piezas de tres dimensiones, al tener un
número reducido de piezas para la producción, ya que existen
más procesos de mecanizado de menor costo, si son aplicados
para fabricar un número elevado de piezas.
Aunque para piezas diseñadas en dos dimensiones, se decidió
fabricarlas por medio del corte laser con material acrílico, ya
que, para estas piezas no es sustentable la relación tamaño costo
de la impresión 3D y por el tiempo necesario para su
elaboración, puesto que, siendo piezas en dos dimensiones el
corte laser es mucho más rápido para su fabricación.
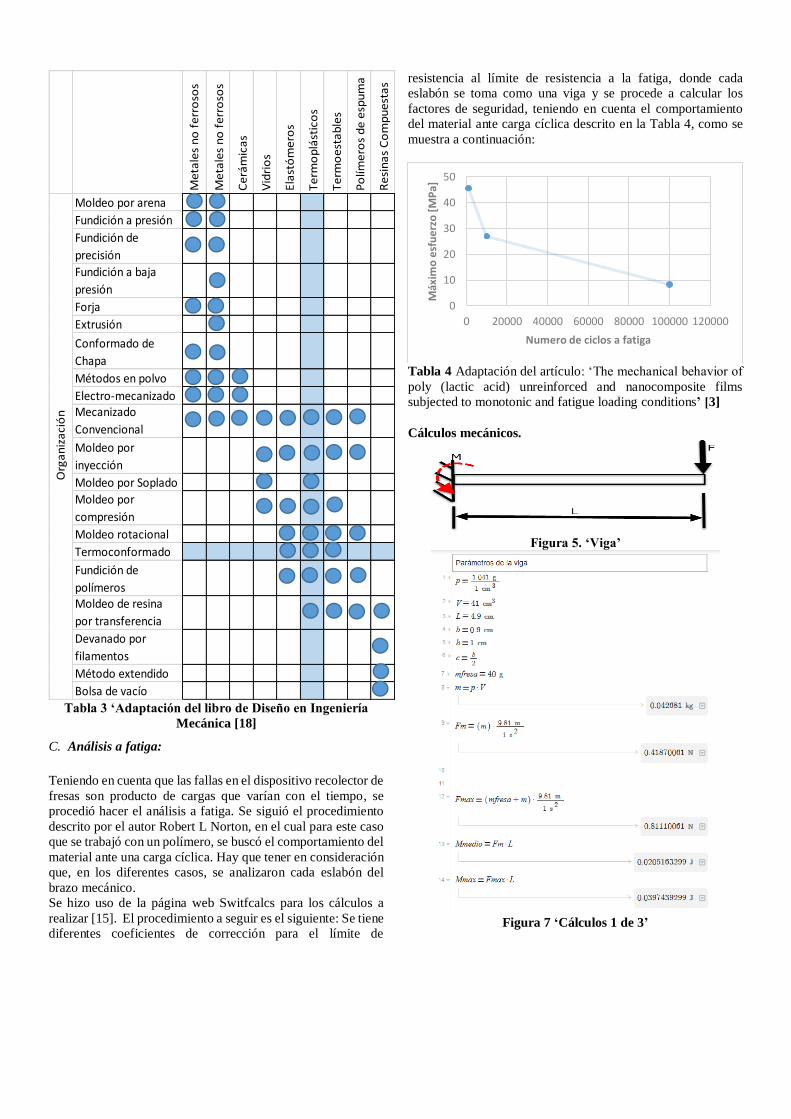
Tabla 3 ‘Adaptación del libro de Diseño en Ingeniería
Mecánica [18]
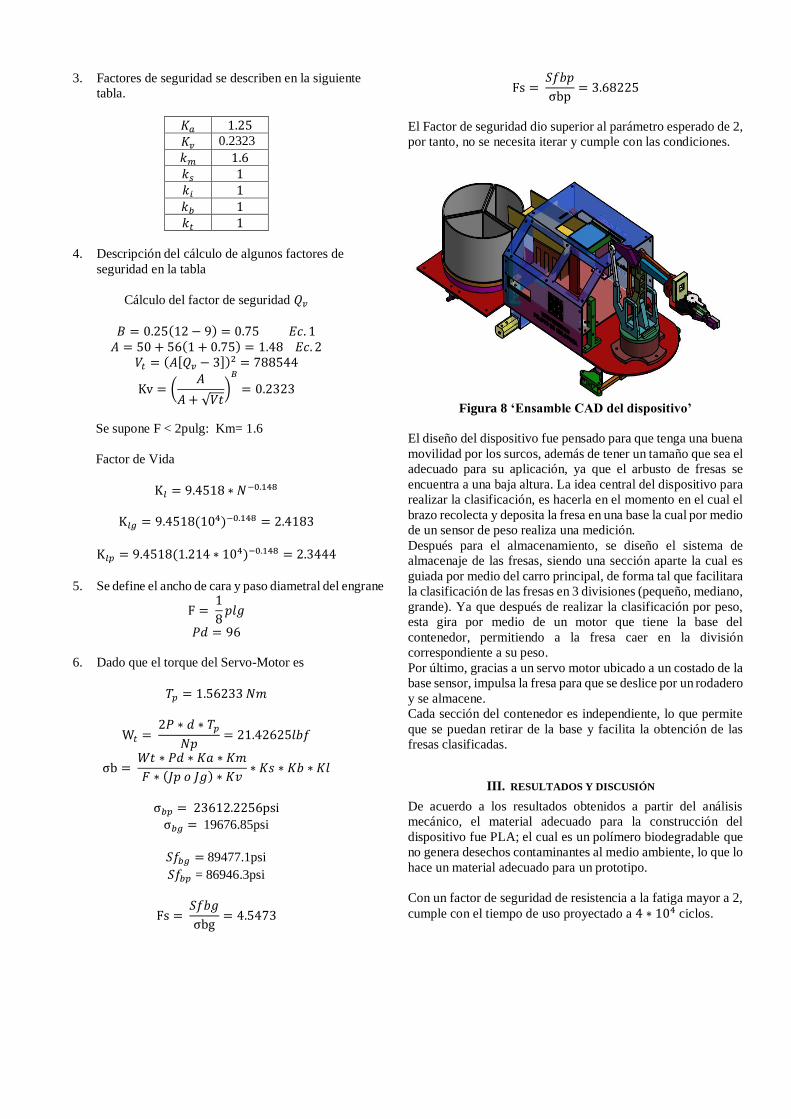
C. Análisis a fatiga:
Teniendo en cuenta que las fallas en el dispositivo recolector de
fresas son producto de cargas que varían con el tiempo, se
procedió hacer el análisis a fatiga. Se siguió el procedimiento
descrito por el autor Robert L Norton, en el cual para este caso
que se trabajó con un polímero, se buscó el comportamiento del
material ante una carga cíclica. Hay que tener en consideración
que, en los diferentes casos, se analizaron cada eslabón del
brazo mecánico.
Se hizo uso de la página web Switfcalcs para los cálculos a
realizar [15]. El procedimiento a seguir es el siguiente: Se tiene
diferentes coeficientes de corrección para el límite de
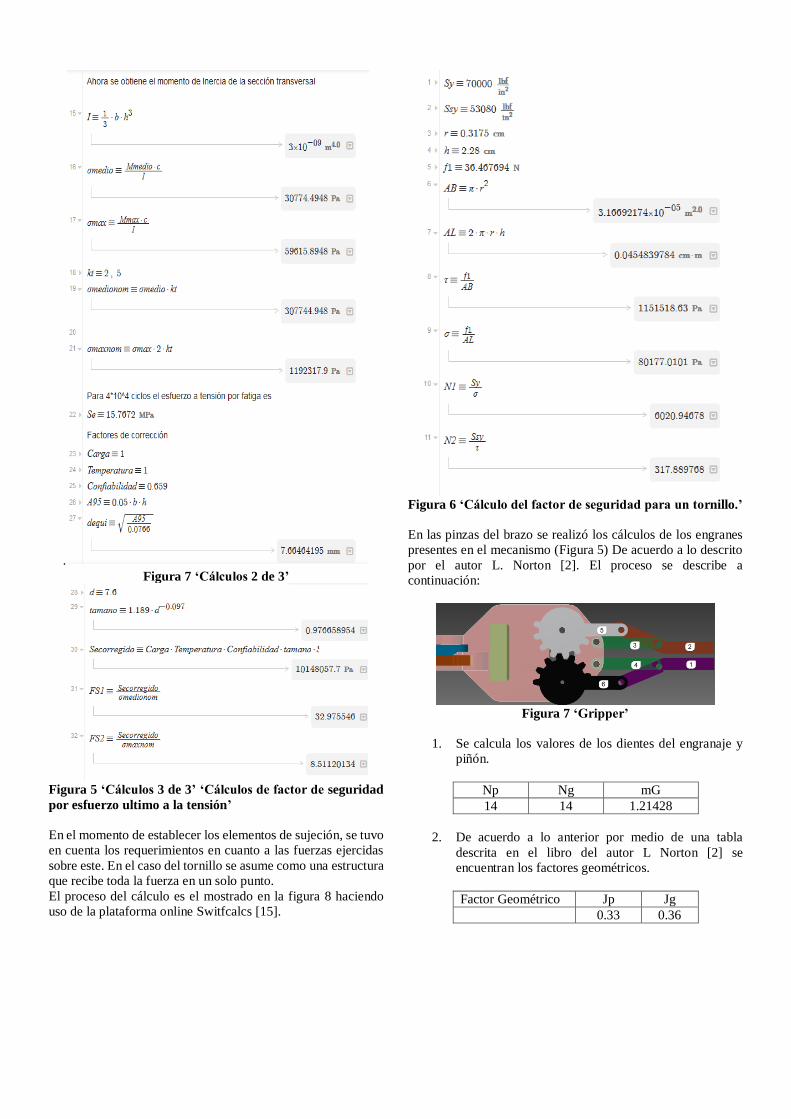
resistencia al límite de resistencia a la fatiga, donde cada
eslabón se toma como una viga y se procede a calcular los
factores de seguridad, teniendo en cuenta el comportamiento
del material ante carga cíclica descrito en la Tabla 4, como se
muestra a continuación:
Tabla 4 Adaptación del artículo: ‘The mechanical behavior of
poly (lactic acid) unreinforced and nanocomposite films
subjected to monotonic and fatigue loading conditions’ [3]
Cálculos mecánicos.
Figura 5. ‘Viga’
Figura 7 ‘Cálculos 1 de 3’
Me
tale
s n
o f
err
oso
s
Me
tale
s n
o f
err
oso
s
Ce
rám
ica
s
Vid
rio
s
Ela
stó
me
ros
Te
rmo
plá
stic
os
Te
rmo
est
ab
les
Po
líme
ros
de
esp
um
a
Re
sin
as
Co
mp
ue
sta
s
Moldeo por arena
Fundición a presión
Fundición de
precisión
Fundición a baja
presión
Forja
Extrusión
Conformado de
Chapa
Métodos en polvo
Electro-mecanizadoMecanizado
Convencional
Moldeo por
inyección
Moldeo por Soplado
Moldeo por
compresión
Moldeo rotacional
Termoconformado
Fundición de
polímerosMoldeo de resina
por transferencia
Devanado por
filamentos
Método extendido
Bolsa de vacío
Org
an
iza
ció
n
0
10
20
30
40
50
0 20000 40000 60000 80000 100000 120000
Máx
imo
esf
ue
rzo
[M
Pa]
Numero de ciclos a fatiga
.
Figura 7 ‘Cálculos 2 de 3’
Figura 5 ‘Cálculos 3 de 3’ ‘Cálculos de factor de seguridad
por esfuerzo ultimo a la tensión’
En el momento de establecer los elementos de sujeción, se tuvo
en cuenta los requerimientos en cuanto a las fuerzas ejercidas
sobre este. En el caso del tornillo se asume como una estructura
que recibe toda la fuerza en un solo punto.
El proceso del cálculo es el mostrado en la figura 8 haciendo
uso de la plataforma online Switfcalcs [15].
Figura 6 ‘Cálculo del factor de seguridad para un tornillo.’
En las pinzas del brazo se realizó los cálculos de los engranes
presentes en el mecanismo (Figura 5) De acuerdo a lo descrito
por el autor L. Norton [2]. El proceso se describe a
continuación:
Figura 7 ‘Gripper’
1. Se calcula los valores de los dientes del engranaje y
piñón.
Np Ng mG
14 14 1.21428
2. De acuerdo a lo anterior por medio de una tabla
descrita en el libro del autor L Norton [2] se
encuentran los factores geométricos.
Factor Geométrico Jp Jg
0.33 0.36
3. Factores de seguridad se describen en la siguiente
tabla.
𝐾𝑎 1.25
𝐾𝑣 0.2323
𝑘𝑚 1.6
𝑘𝑠 1
𝑘𝑖 1
𝑘𝑏 1
𝑘𝑡 1
4. Descripción del cálculo de algunos factores de
seguridad en la tabla
Cálculo del factor de seguridad 𝑄𝑣
𝐵 = 0.25(12 − 9) = 0.75 𝐸𝑐. 1
𝐴 = 50 + 56(1 + 0.75) = 1.48 𝐸𝑐. 2
𝑉𝑡 = (𝐴[𝑄𝑣 − 3])2 = 788544
Kv = (𝐴
𝐴 + √𝑉𝑡)
𝐵
= 0.2323
Se supone F < 2pulg: Km= 1.6
Factor de Vida
K𝑙 = 9.4518 ∗ 𝑁−0.148
K𝑙𝑔 = 9.4518(104)−0.148 = 2.4183
K𝑙𝑝 = 9.4518(1.214 ∗ 104)−0.148 = 2.3444
5. Se define el ancho de cara y paso diametral del engrane
F = 1
8𝑝𝑙𝑔
𝑃𝑑 = 96
6. Dado que el torque del Servo-Motor es
𝑇𝑝 = 1.56233 𝑁𝑚
W𝑡 = 2𝑃 ∗ 𝑑 ∗ 𝑇𝑝
𝑁𝑝= 21.42625𝑙𝑏𝑓
σb = 𝑊𝑡 ∗ 𝑃𝑑 ∗ 𝐾𝑎 ∗ 𝐾𝑚
𝐹 ∗ (𝐽𝑝 𝑜 𝐽𝑔) ∗ 𝐾𝑣∗ 𝐾𝑠 ∗ 𝐾𝑏 ∗ 𝐾𝑙
σ𝑏𝑝 = 23612.2256psi
σ𝑏𝑔 = 19676.85psi
𝑆𝑓𝑏𝑔 = 89477.1psi
𝑆𝑓𝑏𝑝 = 86946.3psi
Fs = 𝑆𝑓𝑏𝑔
σbg= 4.5473
Fs = 𝑆𝑓𝑏𝑝
σbp= 3.68225
El Factor de seguridad dio superior al parámetro esperado de 2,
por tanto, no se necesita iterar y cumple con las condiciones.
Figura 8 ‘Ensamble CAD del dispositivo’
El diseño del dispositivo fue pensado para que tenga una buena
movilidad por los surcos, además de tener un tamaño que sea el
adecuado para su aplicación, ya que el arbusto de fresas se
encuentra a una baja altura. La idea central del dispositivo para
realizar la clasificación, es hacerla en el momento en el cual el
brazo recolecta y deposita la fresa en una base la cual por medio
de un sensor de peso realiza una medición.
Después para el almacenamiento, se diseño el sistema de
almacenaje de las fresas, siendo una sección aparte la cual es
guiada por medio del carro principal, de forma tal que facilitara
la clasificación de las fresas en 3 divisiones (pequeño, mediano,
grande). Ya que después de realizar la clasificación por peso,
esta gira por medio de un motor que tiene la base del
contenedor, permitiendo a la fresa caer en la división
correspondiente a su peso.
Por último, gracias a un servo motor ubicado a un costado de la
base sensor, impulsa la fresa para que se deslice por un rodadero
y se almacene.
Cada sección del contenedor es independiente, lo que permite
que se puedan retirar de la base y facilita la obtención de las
fresas clasificadas.
III. RESULTADOS Y DISCUSIÓN
De acuerdo a los resultados obtenidos a partir del análisis
mecánico, el material adecuado para la construcción del
dispositivo fue PLA; el cual es un polímero biodegradable que
no genera desechos contaminantes al medio ambiente, lo que lo
hace un material adecuado para un prototipo.
Con un factor de seguridad de resistencia a la fatiga mayor a 2,
cumple con el tiempo de uso proyectado a 4 ∗ 104 ciclos.

En el desarrollo del trabajo se hace indispensable una
exhaustiva investigación, planificación para que el desarrollo lo
cual permitió llevar el proyecto hasta su implementación.
Se cumple con el factor de seguridad por medio de los cálculos,
lo cual garantiza que el mecanismo del dispositivo recolector de
fresas no fallara durante su funcionamiento en el tiempo de uso
proyectado.
El dispositivo tiene un gran punto a favor ya que es de un fácil
ensamblaje y desensamble, el cual permite el cambio de piezas
si llegasen a presentar algún fallo.
En las pruebas ejecutadas se obtuvo una eficiencia en la
detección de fresas del 100%, en cuanto al rendimiento en el
agarre alrededor del 70% en fresas obtenidas.
Teniendo en cuenta el espacio limitado en el terreno. Se optó
por dejar el almacenamiento del fruto en una sección aparte del
prototipo funcional, ya que el espacio nos permite ampliar el
dispositivo en cuanto al largo de este, más no en su ancho.
El contenedor clasificador, al ser una sección aparte del
dispositivo, garantiza una mayor facilidad para la higiene y
mayor espacio para el almacenamiento.
Figura 9 ‘Slide-berry’
IV. CONCLUSIONES
- El estudio de falla por fatiga permite asegurar que el
dispositivo no falle antes del tiempo de uso para el cual
fue pensado. Sabiendo que el material escogido fue un
polímero se tuvieron consideraciones especiales.
- Debido a que el desgaste superficial del polímero es
alto en los engranes, debido al contacto de diente
contra diente de cada pieza. Aun sabiendo esto se
trabajó con el material mencionado, porque el tiempo
de vida del prototipo es corto.
- Para el desarrollo del producto final se debe realizar la
selección de materiales de nuevo, ya que el tiempo de
uso del producto debe ser mayor.
- El dispositivo logró los requerimientos de diseño,
correspondientes al espacio y al alcance del fruto. Esto
fue debido que antes de comenzar el diseño se tuvo en
cuenta el espacio que existen en los cultivos y la altura
del fruto.
- El agarre del fruto se debe mejorar, ya que de 10 fresas
reconocidas solo pudo recolectar 7. Lo ideal es que la
eficiencia de este sea del 100%.
- El contenedor se optó de forma circular debido a que
se aprovechaba mejor el espacio y la distribución de
los comportamientos es equitativa.
V. TRABAJO FUTURO
Es un prototipo funcional, que se puede escalar para
implementar en campo abierto, con lo cual se busca potenciar
el rendimiento del cultivo de fresa en la región. Como cualquier
dispositivo se puede seguir mejorando, la idea es hacer el
sistema cada vez más eficiente optimizando los tiempos de
respuesta, en torno al agarre se pensara en adecuar un sistema
de corte, con el fin de no dañar la planta.
Para el desarrollo del producto final se requiere buscar
financiación. Para adecuar el dispositivo a las condiciones de
un terreno a campo abierto, debido a que el terreno puede llegar
a ocasionar problemas de movilidad, ya sea por atasco de las
llantas o por falta de fuerza; en este orden de ideas se debe
pensar en cambiar los motorreductores ubicados en las llantas
del dispositivo, garantizando la movilidad en el terreno.
El dispositivo es parcialmente resistente al agua, sin embargo,
se requiere cambiar el material empleado por uno que sea
resistente al agua, y no presente tanta porosidad, como lo son
los polímeros, debido a que se presta para la proliferación de
microorganismos por su alta degradación.
Se tiene bastante potencial, ya que el proyecto se puede adecuar
a otro tipo de cultivos, que presente condiciones similares al de
fresa, como que sea un tipo de arbusto y que los frutos se den
en una distancia cerca al suelo.
El proyecto se pensó a nivel local, pero esto no impide aplicarlo
en otros contextos para que tengan una alta producción de
diferentes cultivos, en este caso se debe rediseñar el dispositivo
paras las condiciones y requerimientos en cada lugar.

VI. REFERENCIAS
[1] “Manual técnico del cultivo de fresa bajo buenas prácticas agrícolas”, Francisco Vélez (Litografía). Sena, Antioquia la más educada. Gobernación de Antioquia, Secretaria de agricultura y desarrollo rural. Medellín, Colombia, 2014.
[2] Robert L.Norton. “Diseño de Maquinas”, Cuarta Edición, Pearson Educación, México, 2011, ISBN: 978-607-32-0589-4.
[3] Rodney D. Averett1, Mary L. Realff, Karl Jacob, Mukerrem Cakmak and Baris Yalcin. The mechanical behavior of poly(lactic acid) unreinforced and nanocomposite films subjected to monotonic and fatigue loading conditions.2011
[4] The mechanical behavior of poly(lactic acid) unreinforced and nanocomposite films subjected to monotonic and fatigue loading conditions. Rodney D. Averett, Mary L. Realff, Karl Jacob, Mukerrem Cakmak3 and Baris Yalcin. 2011
[5] Consultado el 14 de septiembre del 2016. Disponibe en intertnet en: http://www.revistaambienta.es/WebAmbienta/marm/Dinamicas/secciones/articulos/AP.htm
[6] Polylactic Acid PLA Biopolymer Technology and Applications. First edition 2012. ISBN: 978-1-4377-4459-0
[7] Handbook of Biopolymers and Biodegradable Plast. Xiuzhi Susan Sun.
[8] Handbook of biopolymers and biodegradable plastics properties, processing, and applications. Sina Ebnesajjad, The Boulevard, Langford Lane, Kidlington, Oxford, OX5 1GB, UK 225 Wyman Street, Waltham, MA 02451, USA. First published 2013
[9] Peek biomaterials handbook. Steven M. Kurtz. First edition 2012.
[10] E GArcía y F Flego. ‘Agricultura de precisión’Alumnos Universidad de Palermo.
[11] PLA. ‘Fatigue Property and Mechanism of Uniderectional Jute Spun Yarn Reinforced PLA’Hidekai KAtogui, Yashinobu Shimamura, Keiichiro Tohgo and Tomoyuki Fujii. Octubre 6 2010
[12] Zaleha Binti Mustafa. ‘Multiaxial fatigue characterization of self-reinforced polylactic acidcalcium phosphate composite’ Biomedical Engineering Division School of Engineering College of Science and Engineering University of Glasgow Octubre 2012
[13] Evandro Chartuni Mantovani, Carlos Magdalena. Manual de Agricultura de Precisión. IICA.
[14] James C. Gerdeen, PhD, PE y Ronald A. L. Rorrer, PhD, PE Engineering Design with Polymers and Composites. Segunda Edición. 2012.
[15] Consultado 8 de Noviembre del 2015. Dispobible en Internet: https://www.swiftcalcs.com/
[16] Consultado 18 de Noviembre del 2016. Dispobible en Internet: http://www.dinero.com/pais/articulo/exportaciones-colombianas-fruta/209741
[17] Consultado 18 de Noviembre del 2016. Dispobible en Internet:
http://www.materials.eng.cam.ac.uk/mpsite/interactive_charts/stiffness-cost/basic.html
[18] Richar G.Budynas y J. Keith Nisbett. ‘Diseño en Ingeniería mecánica’ Octava Edición . McGraw-Hill . México 2008 ISBN-10: 970-10-6404-6
Related Documents











