A i i utomatisation nstitut d' ndustrielle Mécatronique 2 (MET2) Chapitre 1: Les applications des entraînements réglés Filière Génie électrique (EN, EM) Filière Microtechnique (MIC, MIM) Prof. Michel ETIQUE [email protected] Haute Ecole d’Ingénierie et de Gestion du Canton de Vaud (HEIG-Vd) Département des Technologies Industrielles (TIN) institut d’Automatisation industrielle (iAi) Mécatronique 2 (MET2) – p. 1/5

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Mécatronique 2 (MET2)
Chapitre 1: Les applications des entraînementsréglés
Filière Génie électrique (EN, EM)Filière Microtechnique (MIC, MIM)
Prof. Michel ETIQUE
Haute Ecole d’Ingénierie et de Gestion du Canton de Vaud (HEIG-Vd)
Département des Technologies Industrielles (TIN)
institut d’Automatisation industrielle (iAi)Mécatronique 2 (MET2) – p. 1/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Préambule
Mécatronique 2 (MET2) – p. 2/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Informations diverses
≈ 50% d’exercicesSimulation, analyse avec outils informatiques :
MATLABSysQuakeSciLab
Slides pdf + tableau2 travaux-écritsExamen de fin d’unité final (oral ou écrit)Cours conçu à l’origine pour la filière Génieélectrique (formation de jour)
Mécatronique 2 (MET2) – p. 3/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Forme informatique du cours
Cours, slides et exercices en formats html, pdf,source LATEX 2ε :
http://www.iai.heig-vd.ch/ mee/
Mécatronique 2 (MET2) – p. 4/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Introduction
Mécatronique 2 (MET2) – p. 5/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Tentative de définition
Entraînements : dispositifs techniques permettant demettre en mouvement des masses, i.e. produisant desforces [N] et des couples [N · m] mécaniques.
Mécatronique 2 (MET2) – p. 6/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Tentative de définition
Entraînements : dispositifs techniques permettant demettre en mouvement des masses, i.e. produisant desforces [N] et des couples [N · m] mécaniques. Exemples :
table XY d’une machine-outilbroche d’une fraiseuseporte-outiltable XY d’un traceur (plotter)disque dur d’un ordinateurtapis roulantvéhiculemachine d’impression de journauxoutils d’un poste de travail automatisé
Mécatronique 2 (MET2) – p. 6/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
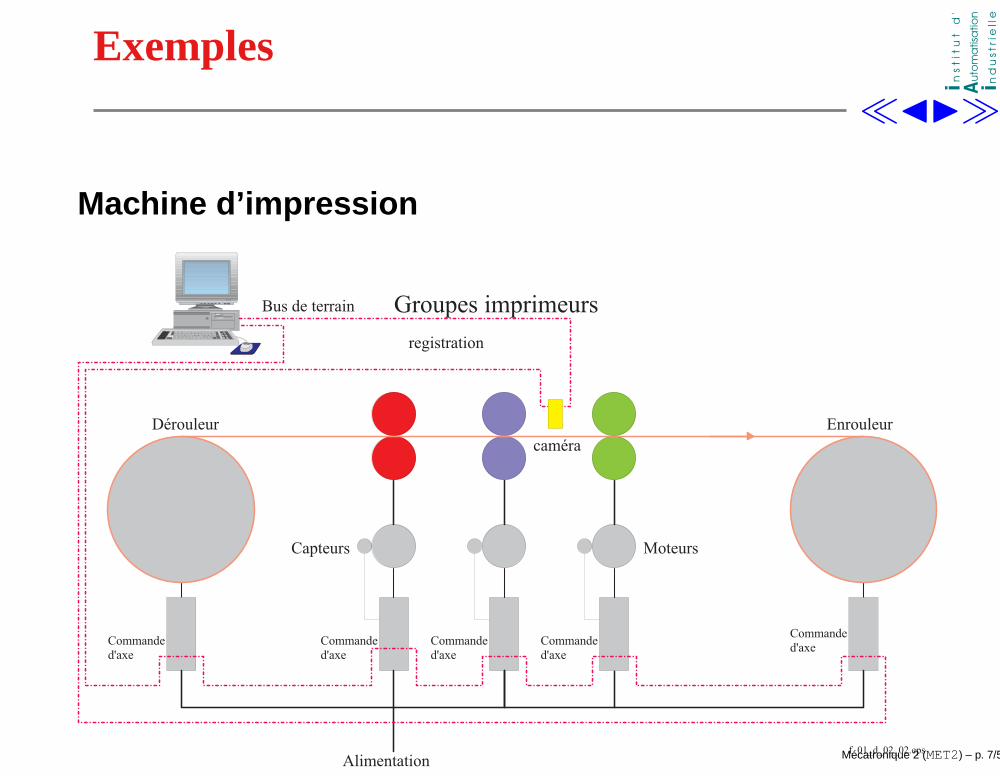
Exemples
Machine d’impression
D é r o u l e u r E n r o u l e u r
M o t e u r s
A l i m e n t a t i o n
C a p t e u r s
B u s d e t e r r a i n G r o u p e s i m p r i m e u r sr e g i s t r a t i o n
c a m é r a
C o m m a n d ed ' a x e
C o m m a n d ed ' a x e
C o m m a n d ed ' a x e
C o m m a n d ed ' a x e
C o m m a n d ed ' a x e
f _ 0 1 _ d _ 0 2 _ 0 2 . e p sMécatronique 2 (MET2) – p. 7/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Exemples
Machines d’assemblage
1. Exemple 1
2. Exemple 2
3. Machine d’assemblage de moteurs(Photo moteurs)
Mécatronique 2 (MET2) – p. 7/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Exemples
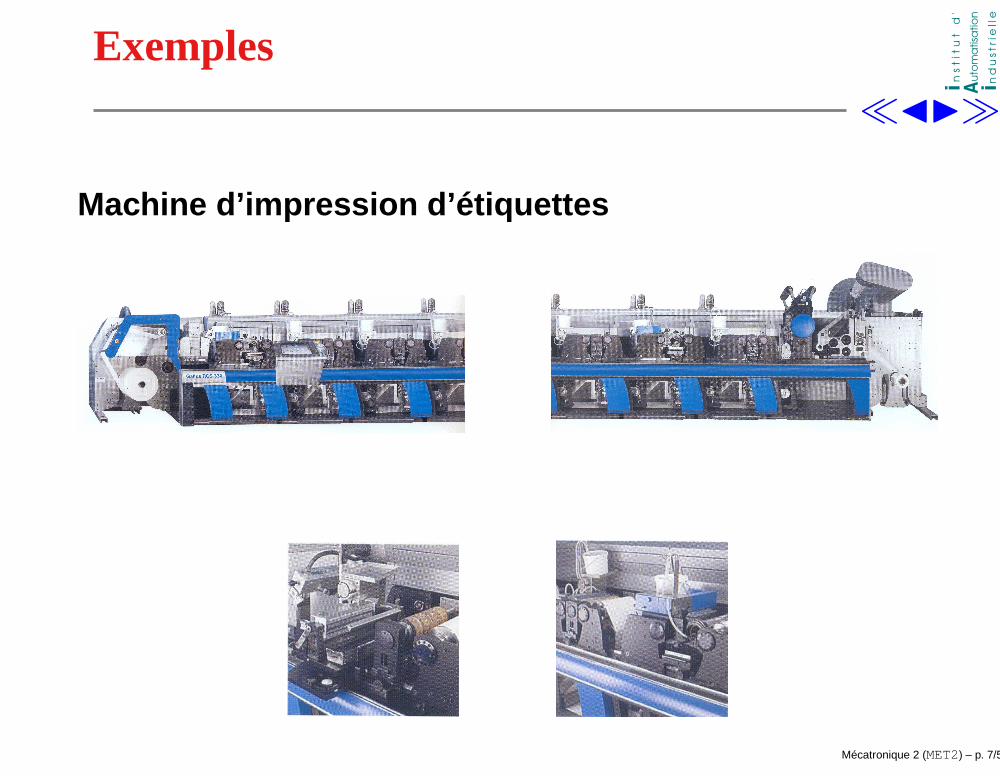
Machine d’impression d’étiquettes
Mécatronique 2 (MET2) – p. 7/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Exemples
Machine d’impression d’étiquettes
Mécatronique 2 (MET2) – p. 7/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Classification
Forme du mouvement : dépend de l’application
Entraînements non-réglés : aucun contrôle direct dumouvement (θ(t), ω(t), Tem(t), etc) (−→ commande enboucle ouverte)
Mécatronique 2 (MET2) – p. 8/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Classification
Forme du mouvement : dépend de l’application
Entraînements non-réglés : aucun contrôle direct dumouvement (θ(t), ω(t), Tem(t), etc) (−→ commande enboucle ouverte)
Entraînements réglés : le mouvement est supervisépendant son déroulement (commande en bouclefermée)
Possibilité de fonctionner dans une large gamme devitesses : entraînements à vitesse variable"servo-entraînements"Contrôle de mouvement = "motion control" Mécatronique 2 (MET2) – p. 8/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Mécatronique 2 (MET2) – p. 9/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Mécatronique 2 (MET2) – p. 9/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Mécatronique 2 (MET2) – p. 9/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Machines d’emballage, de mise sous pli
Mécatronique 2 (MET2) – p. 9/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Machines d’emballage, de mise sous pli
Machine d’assemblage
Mécatronique 2 (MET2) – p. 9/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Machines d’emballage, de mise sous pli
Machine d’assemblage
Robots (soudage, peinture, vissage, assemblage)
Mécatronique 2 (MET2) – p. 9/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Machines d’emballage, de mise sous pli
Machine d’assemblage
Robots (soudage, peinture, vissage, assemblage)
Laminoirs
Mécatronique 2 (MET2) – p. 9/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les utilisateurs des entraînements
Machines-outils (tours, perceuses, fraiseuses, poinçonneuses, machinesd’électro-érosion, scies spéciales, rectifieuses, etc)
Machines textiles (machines à coudre, à tisser, à tricoter)
Machines d’imprimerie (centres d’impression de journaux, impression de billets debanque)
Machines d’emballage, de mise sous pli
Machine d’assemblage
Robots (soudage, peinture, vissage, assemblage)
Laminoirs
Chaînes de montage (convoyage, assemblage, vissage)
Mécatronique 2 (MET2) – p. 9/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
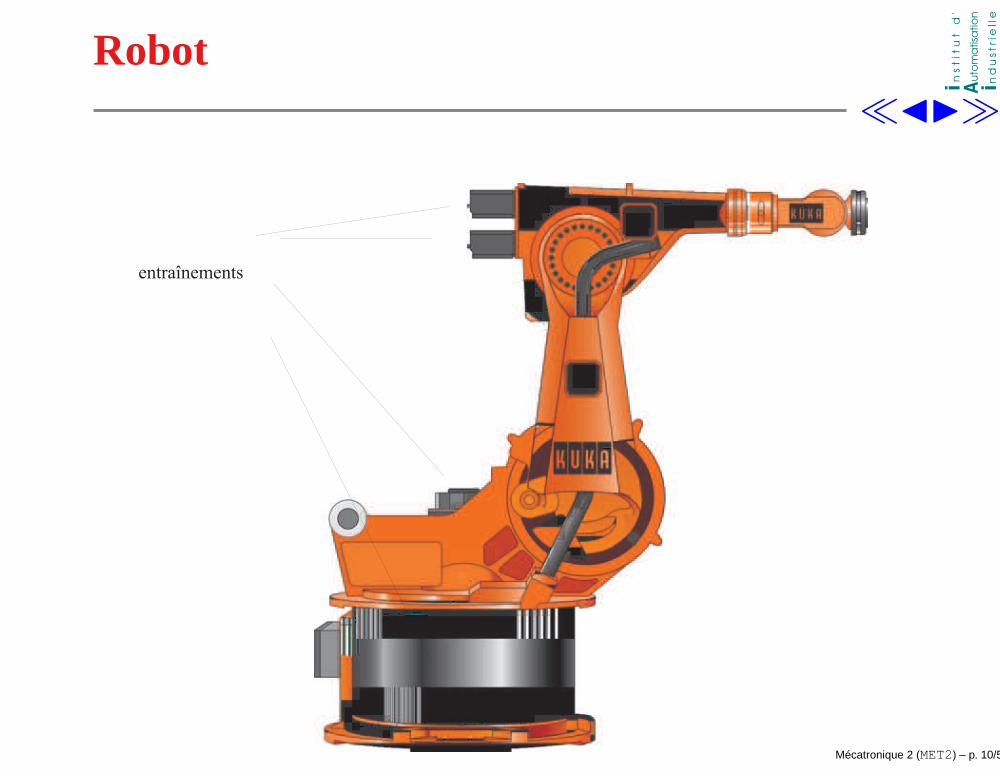
Robot
e n t r a î n e m e n t s
Mécatronique 2 (MET2) – p. 10/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Machine d’assemblage
Mécatronique 2 (MET2) – p. 11/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Bol vibrant
Mécatronique 2 (MET2) – p. 12/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
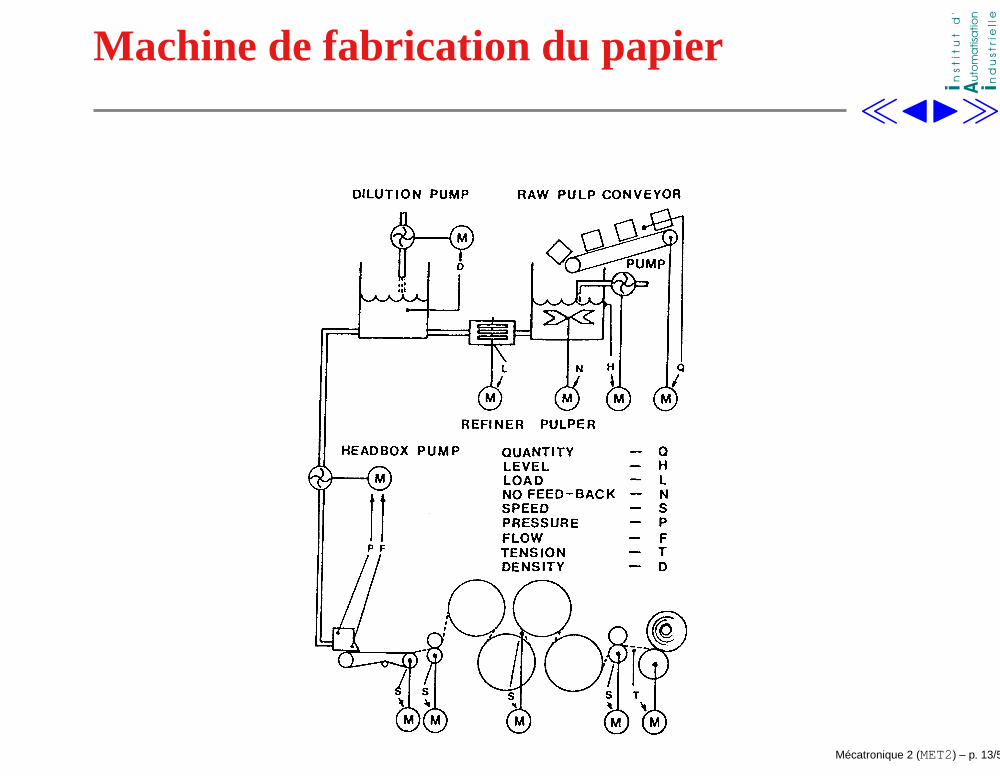
Machine de fabrication du papier
Mécatronique 2 (MET2) – p. 13/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
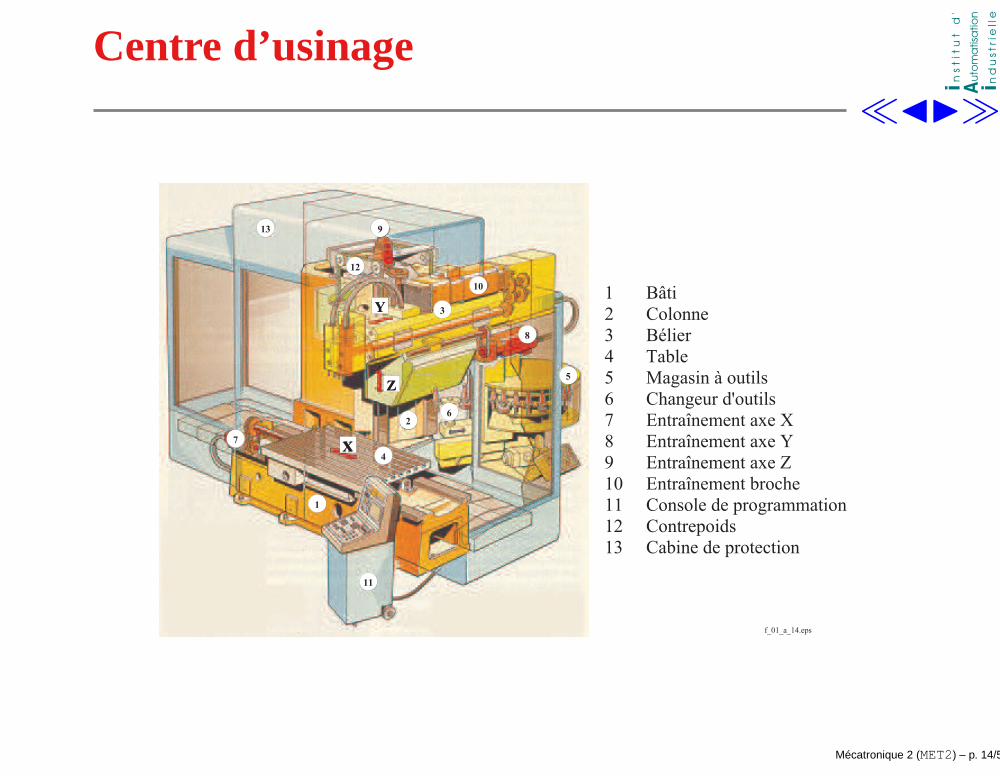
Centre d’usinage
91 3
1 0
8
5
62
1
3
47
1 1
1 2
1 B â t i2 C o l o n n e3 B é l i e r4 T a b l e5 M a g a s i n à o u t i l s6 C h a n g e u r d ' o u t i l s7 E n t r a î n e m e n t a x e X8 E n t r a î n e m e n t a x e Y9 E n t r a î n e m e n t a x e Z1 0 E n t r a î n e m e n t b r o c h e1 1 C o n s o l e d e p r o g r a m m a t i o n1 2 C o n t r e p o i d s1 3 C a b i n e d e p r o t e c t i o n
X
Z
Y
X
Y
Z
f _ 0 1 _ a _ 1 4 . e p s
Mécatronique 2 (MET2) – p. 14/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Objectifs du cours
1. Les applications des entraînements électriques réglés
Mécatronique 2 (MET2) – p. 15/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Objectifs du cours
1. Les applications des entraînements électriques régléssystèmes maître - esclave, coordination d’axescontrôle du couplecomparaison des différents types d’entraînements
(électrique, hydraulique, pneumatique)éléments constitutifs d’un entraînement électrique
réglé
Mécatronique 2 (MET2) – p. 15/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Objectifs du cours
1. Les applications des entraînements électriques réglés
2. Les servo-entraînements électriques (3 chapitres)
Mécatronique 2 (MET2) – p. 15/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Objectifs du cours
1. Les applications des entraînements électriques réglés
2. Les servo-entraînements électriques (3 chapitres)présentation et comparaison des différents types
d’entraînements électriques (DC, DC brushless,synchrone auto-commuté, asynchrone)fonctionnement à vitesse variableperformances
Mécatronique 2 (MET2) – p. 15/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Objectifs du cours
1. Les applications des entraînements électriques réglés
2. Les servo-entraînements électriques (3 chapitres)
3. Dimensionnement d’un entraînement électrique(selon le temps disponible)
4. Régulation et automatisation(selon le temps disponible)
Mécatronique 2 (MET2) – p. 15/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les applications des entraînements réglés
Mécatronique 2 (MET2) – p. 16/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
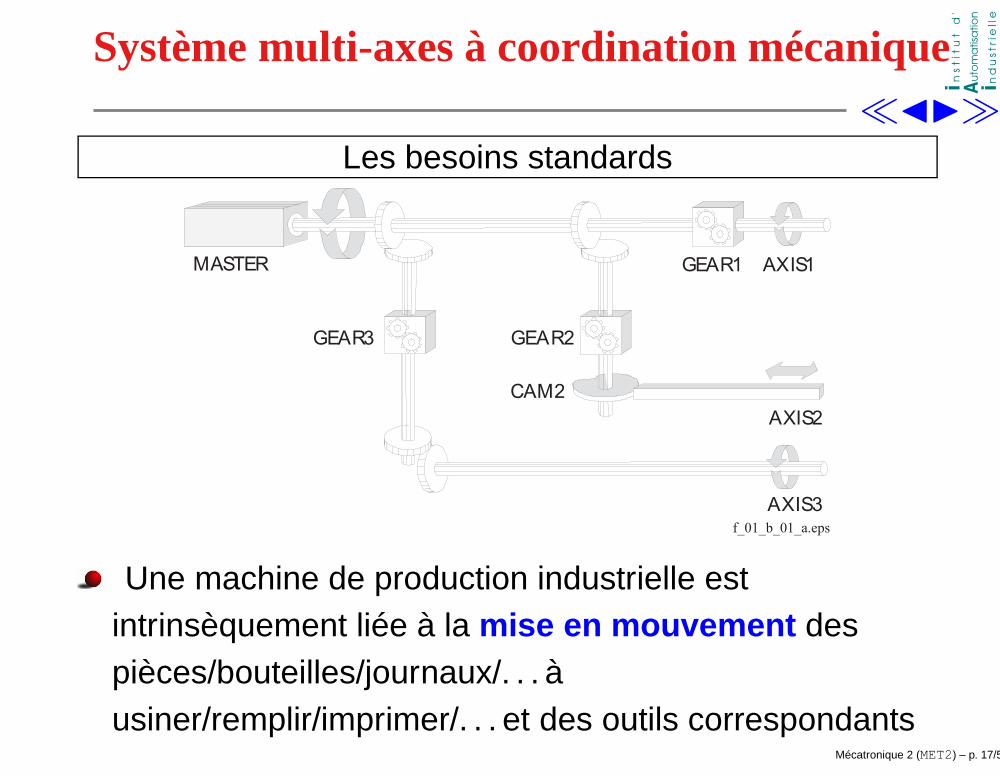
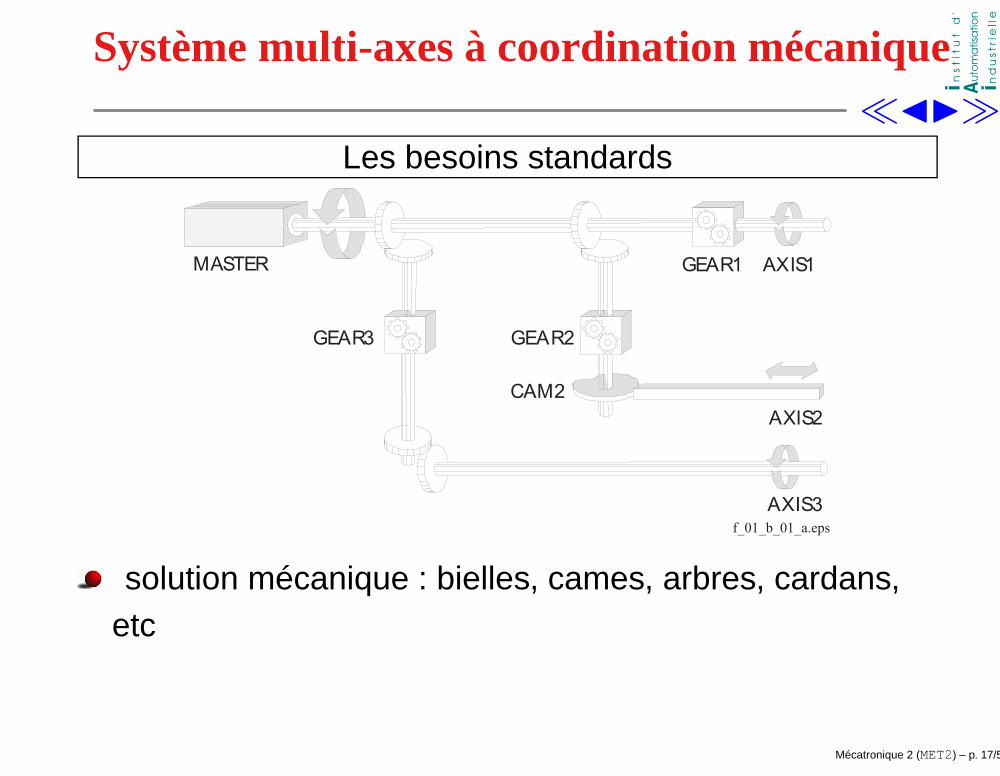
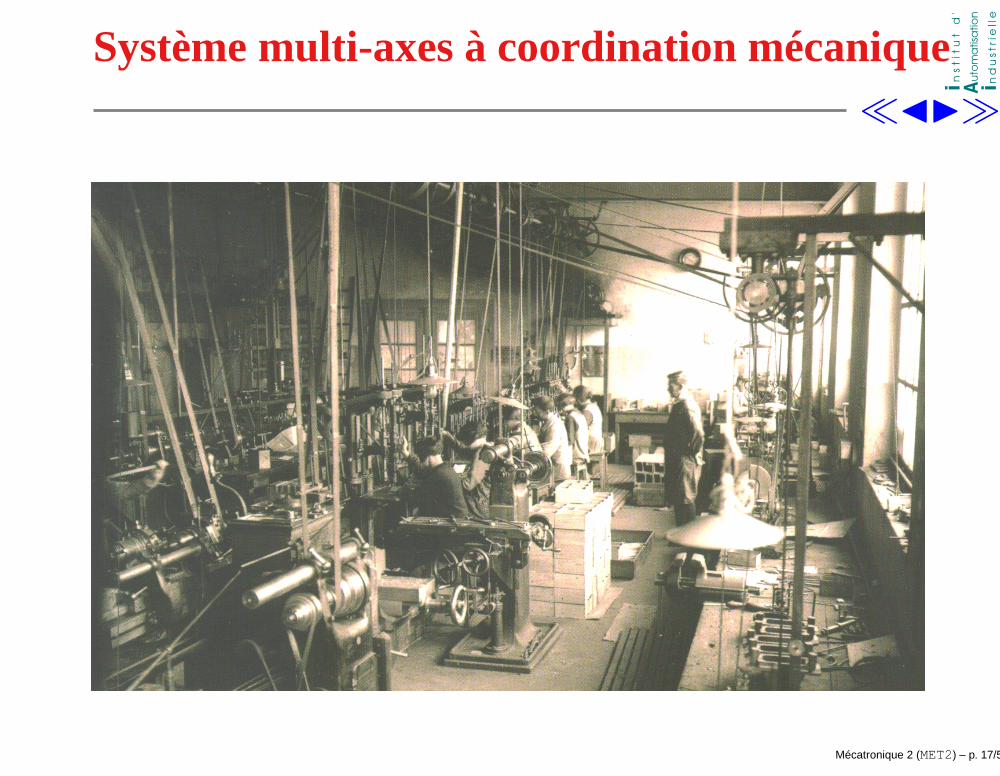
Système multi-axes à coordination mécanique
Les besoins standards
G E A R 3 G E A R 2C A M 2
G E A R 1 A X I S 1
A X I S 2
A X I S 3
M A S T E R
f _ 0 1 _ b _ 0 1 _ a . e p s
Une machine de production industrielle estintrinsèquement liée à la mise en mouvement despièces/bouteilles/journaux/. . . àusiner/remplir/imprimer/. . . et des outils correspondants
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
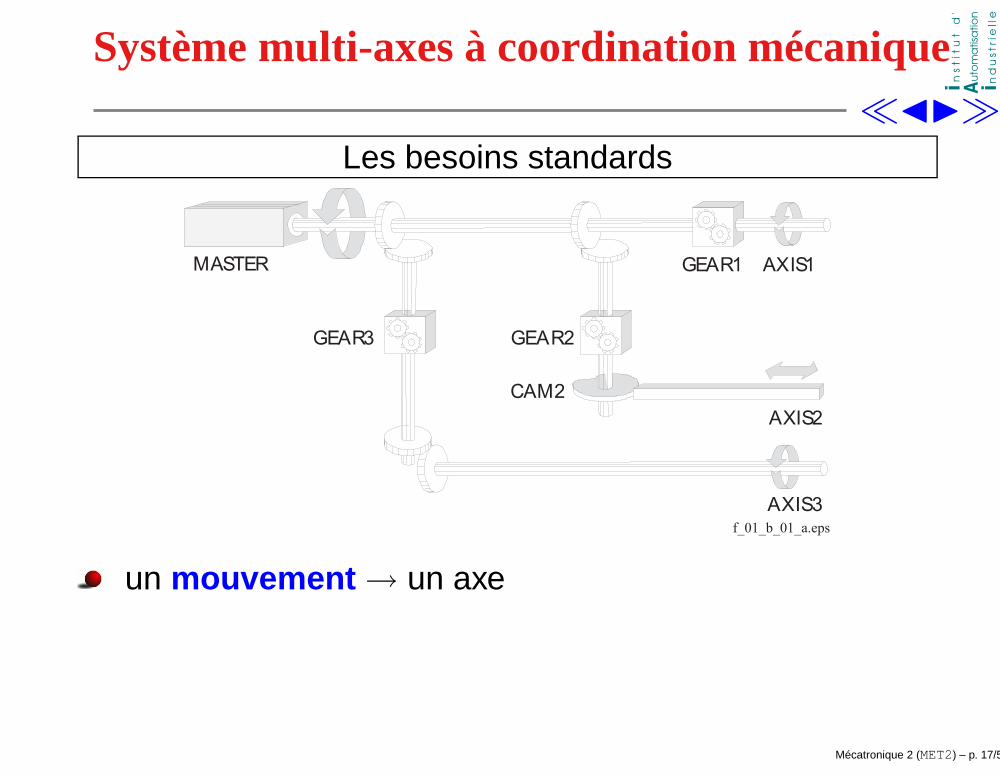
Système multi-axes à coordination mécanique
Les besoins standards
G E A R 3 G E A R 2C A M 2
G E A R 1 A X I S 1
A X I S 2
A X I S 3
M A S T E R
f _ 0 1 _ b _ 0 1 _ a . e p s
un mouvement → un axe
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
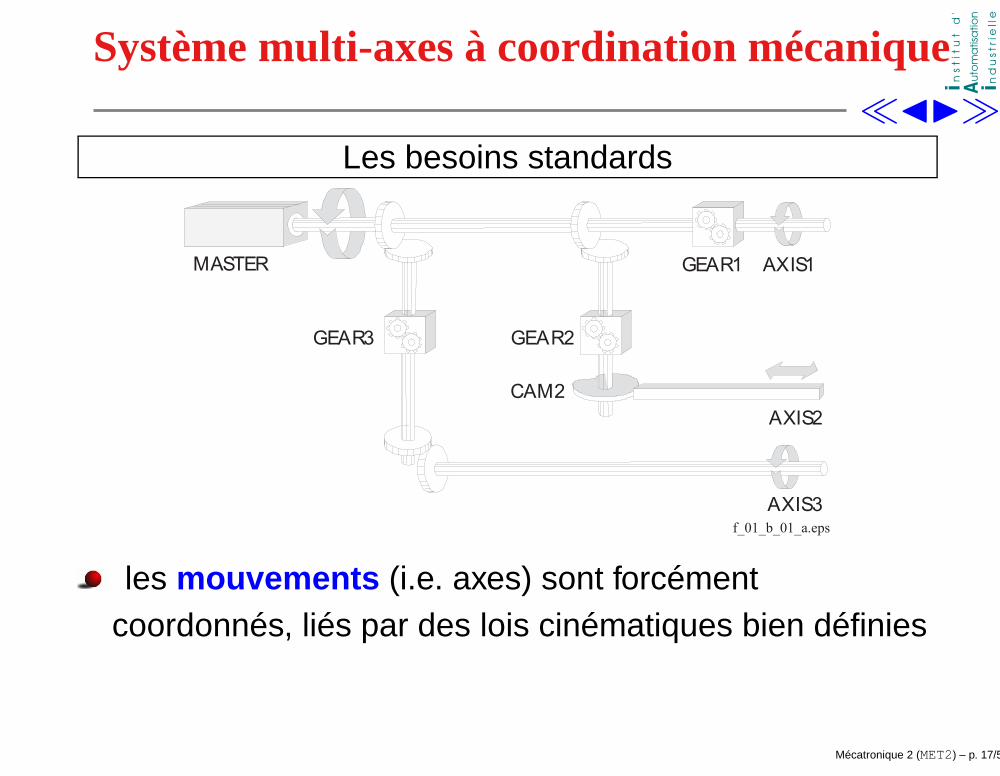
Système multi-axes à coordination mécanique
Les besoins standards
G E A R 3 G E A R 2C A M 2
G E A R 1 A X I S 1
A X I S 2
A X I S 3
M A S T E R
f _ 0 1 _ b _ 0 1 _ a . e p s
les mouvements (i.e. axes) sont forcémentcoordonnés, liés par des lois cinématiques bien définies
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
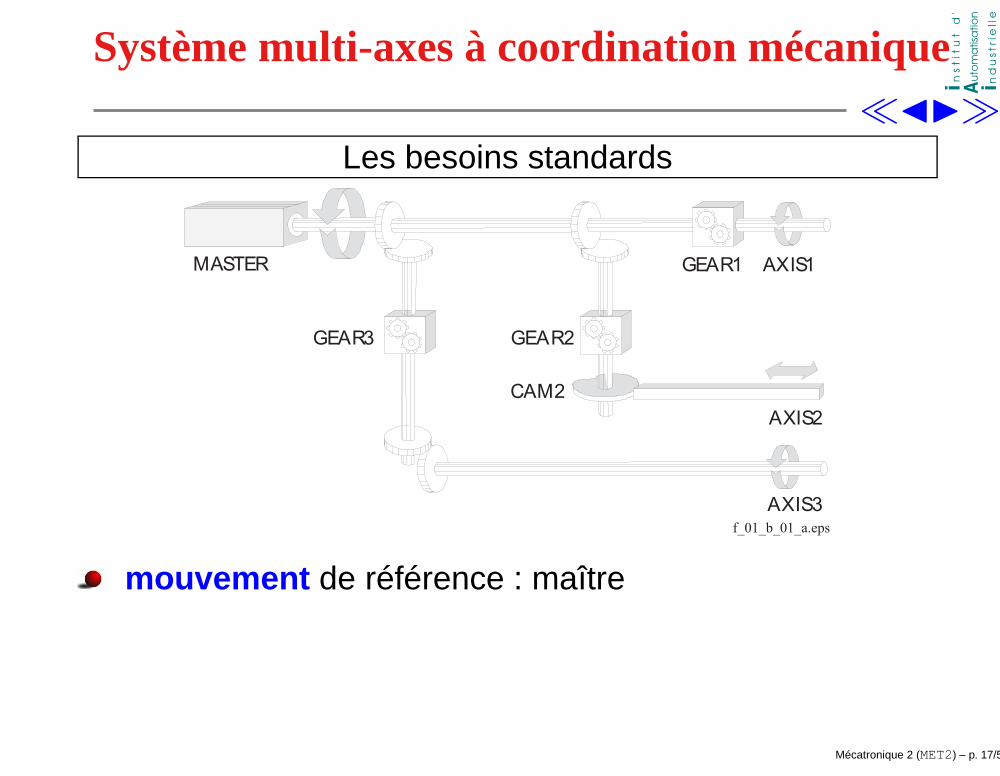
Système multi-axes à coordination mécanique
Les besoins standards
G E A R 3 G E A R 2C A M 2
G E A R 1 A X I S 1
A X I S 2
A X I S 3
M A S T E R
f _ 0 1 _ b _ 0 1 _ a . e p s
mouvement de référence : maître
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Les besoins standards
G E A R 3 G E A R 2C A M 2
G E A R 1 A X I S 1
A X I S 2
A X I S 3
M A S T E R
f _ 0 1 _ b _ 0 1 _ a . e p s
solution mécanique : bielles, cames, arbres, cardans,etc
Mécatronique 2 (MET2) – p. 17/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Mécatronique 2 (MET2) – p. 17/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Mécatronique 2 (MET2) – p. 17/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Mécatronique 2 (MET2) – p. 18/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Faible rendement énergétique
Mécatronique 2 (MET2) – p. 18/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Faible rendement énergétique
Nuisances (bruit, sécurité des personnes)
Mécatronique 2 (MET2) – p. 18/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Faible rendement énergétique
Nuisances (bruit, sécurité des personnes)
Encombrement dû aux transmissions
Mécatronique 2 (MET2) – p. 18/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Faible rendement énergétique
Nuisances (bruit, sécurité des personnes)
Encombrement dû aux transmissions
Charge mécanique complexe (jeu, élasticité, usure)
Mécatronique 2 (MET2) – p. 18/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes à coordination mécanique
Limites de la coordination d’axes mécanique
Manque de flexibilité d’utilisation, rigidité de laconfiguration
Faible rendement énergétique
Nuisances (bruit, sécurité des personnes)
Encombrement dû aux transmissions
Charge mécanique complexe (jeu, élasticité, usure)
Entretien fréquent (lubrification, remplacement decertains composants)
Mécatronique 2 (MET2) – p. 18/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les nouvelles exigences
Flexibilité de la configuration de la machine, autorisantpar exemple le changement au vol du type de production("one piece flow")
Possibilité de faire des démarrages et arrêts contrôlés(vitesse et position), ainsi que des arrêts d’urgencecontrôlés en cas de défectuosité d’un des moteursd’entraînements ou de chute du réseau d’alimentation
Mécatronique 2 (MET2) – p. 19/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les nouvelles exigences
Modification de la cadence de travail (fonctionnement àplusieurs vitesses)Meilleures performances dynamiques (démarrage,
freinage)Rendement énergétique amélioré, approchant l’optimalConformité aux normes (sécurité, bruits, etc)Entretien réduitFiabilité et sécurité de fonctionnement accruesAugmentation des cadences de travail ainsi que de la
précisionMise en service rapide, en partie automatique
Mécatronique 2 (MET2) – p. 19/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
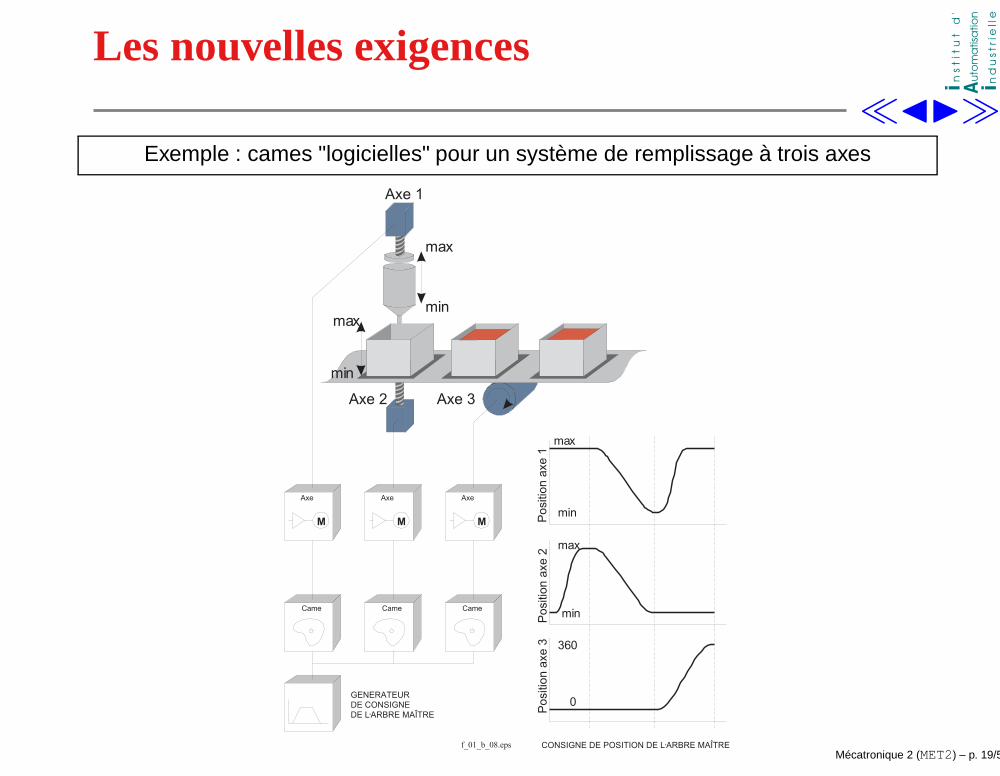
Les nouvelles exigences
Exemple : cames "logicielles" pour un système de remplissage à trois axes
A x e
M M M
m i n
m a x
m a x
A x e 1
0
m i n
m a xm i n
m a x
3 6 0
Positi
on axe
1
A x e 2 A x e 3
m i n
f _ 0 1 _ b _ 0 8 . e p s
G E N E R A T E U RD E C O N S I G N ED E L ' A R B R E M A Î T R E
C O N S I G N E D E P O S I T I O N D E L ' A R B R E M A Î T R E
Positi
on axe
2Po
sition
axe 3
A x eA x e A x e
C a m eC a m e C a m e
Mécatronique 2 (MET2) – p. 19/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Programmation des mouvements d’un système multi-axes
/*Pipes installation*/
Conv1 « « Gear1 « Master ;
Conv2 « Cam2 « Gear2 « Master ;
Conv3 « « Gear3 « Master ;
Condition (Conv1:
ready)
(Conv1:
ready)
(Conv1:
ready)
/*Run the system at 2 turn per second (for example)*/
Master <- run (720)
Mécatronique 2 (MET2) – p. 20/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Commande d’axe/drive/servo-commande
s e r v o - c o m m a n d e
s e r v o - m o t e u r ,y . c . c a p t e u r d e
p o s i t i o n o u d e v i t e s s e
c â b l e p u i s s a n c ec â b l e c a p t e u r
l i a i s o na v e c
l e m a î t r e
a l i m e n t a t i o n( r é s e a u ,
2 4 [ V D C ] , e t c )
e n t r a î n e m e n t
c â b l e p r o t e c t i o n t h e r m i q u e
f _ 0 1 _ a _ 0 9 . e p s
Chaque axe, i.e. chaque mouvement, est doté d’unentraînement dédié, comprenant forcément le moteur et sacommande
Mécatronique 2 (MET2) – p. 21/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Commande d’axe/drive/servo-commande
s e r v o - c o m m a n d e
s e r v o - m o t e u r ,y . c . c a p t e u r d e
p o s i t i o n o u d e v i t e s s e
c â b l e p u i s s a n c ec â b l e c a p t e u r
l i a i s o na v e c
l e m a î t r e
a l i m e n t a t i o n( r é s e a u ,
2 4 [ V D C ] , e t c )
e n t r a î n e m e n t
c â b l e p r o t e c t i o n t h e r m i q u e
f _ 0 1 _ a _ 0 9 . e p s
Version minimale :électronique de puissanceélectronique de commande et de réglage de l’étage de
puissanceun dispositif de communication avec le maître voire
avec les autres axesMécatronique 2 (MET2) – p. 21/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système multi-axes
U t i l i s a t e u r ,c o m m a n d e h i é a r c h i q u e m e m e n t s u p é r i e u r e
G e s t i o n d e l ' é t a t d e l a m a c h i n e o u d ' u n e s e c t i o n d e l a m a c h i n e( p a r e x . A u t o m a t e p r o g r a m m a b l e )
C o o r d i n a t i o n d ' a x e s ( p a r e x . c o m m a n d e n u m é r i q u e )
A x e 1 A x e 2 A x e i
M a c h i n e o u s e c t i o n d e m a c h i n eE n t r é e s / s o r t i e s b i n a i r e s
C o n s i g n e s d e p o s i t i o n / v i t e s s e / c o u p l et r a n s m i s e s p a r b u s d e t e r r a i n r a p i d e
O r d r e s d e m o u v e m e n t s ,s é q u e n c e s d ' o p é r a t i o n s
f _ 0 1 _ a _ 1 1 . e p s
Mécatronique 2 (MET2) – p. 22/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
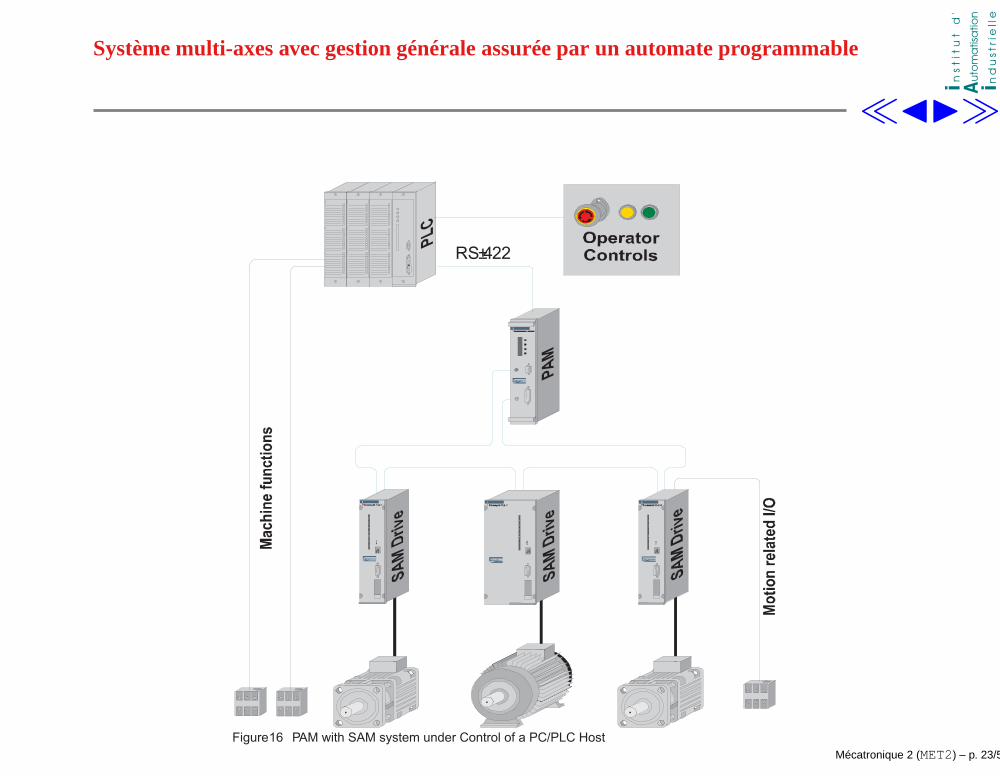
Système multi-axes avec gestion générale assurée par un automate programmable
R S ± 4 2 2
F i g u r e 1 6 P A M w i t h S A M s y s t e m u n d e r C o n t r o l o f a P C / P L C H o s tMécatronique 2 (MET2) – p. 23/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Machine d’impression d’étiquettes
LL L L LL L LL L L
l
S o c a p e l P A M
U n w i n d i n gU n i t
P r i n t i n gU n i t
S t a m p i n gU n i t
W i n d i n gU n i t
l
L o c a l P L CC A N B u s
F i b e r O p t i c F i e l d b u s
L o c a l P L C L o c a l P L C L o c a l P L C
I / O I / O I / O I / O
F i g u r e 2 4 L a b e l P r i n t i n g M a c h i n e S c h e m a t i c D i a g r a mMécatronique 2 (MET2) – p. 24/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
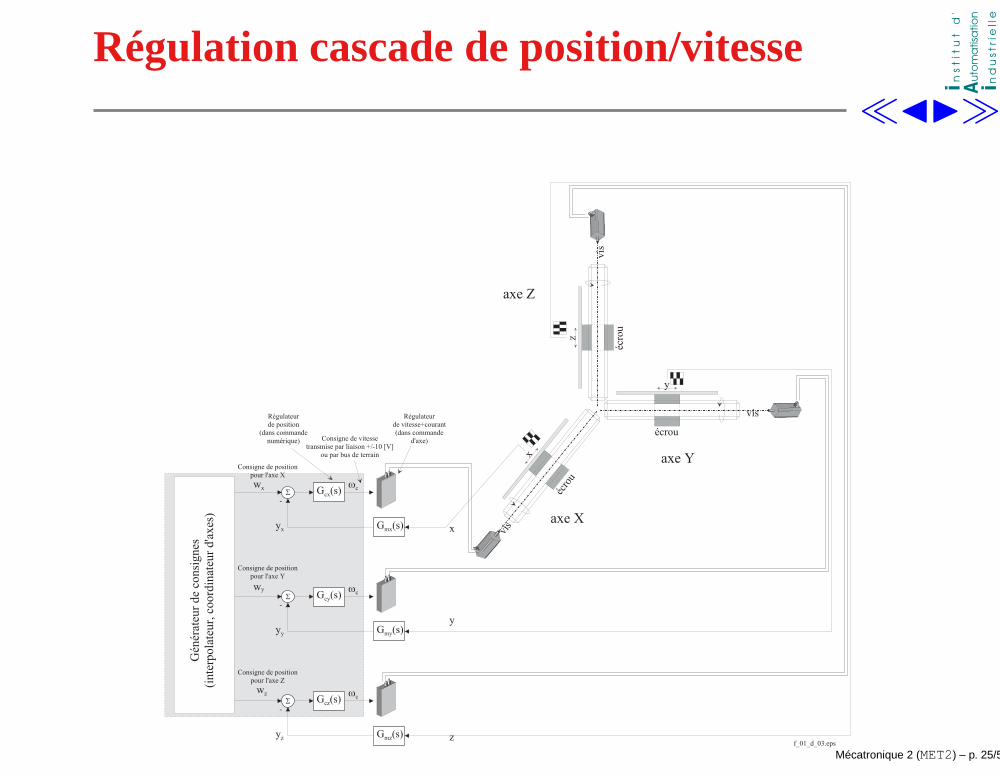
Régulation cascade de position/vitesse
w x
y x
S-
G c x ( s )
G m x ( s )
R é g u l a t e u rd e v i t e s s e + c o u r a n t( d a n s c o m m a n d e
d ' a x e )
R é g u l a t e u rd e p o s i t i o n
( d a n s c o m m a n d en u m é r i q u e )
w c
x
Générat
eur d
e consig
nes
(inter
polateur, c
oordi
nateu
r d'ax
es)
f _ 0 1 _ d _ 0 3 . e p s
C o n s i g n e d e v i t e s s et r a n s m i s e p a r l i a i s o n + / - 1 0 [ V ]
o u p a r b u s d e t e r r a i n
é c ro u
v i sx
é c r o uv i s
y
écrou
vis
zw y
y y
S-
G c y ( s )
G m y ( s )
w c
y
w z
y z
S-
G c z ( s )
G m z ( s )
w c
z
C o n s i g n e d e p o s i t i o np o u r l ' a x e X
C o n s i g n e d e p o s i t i o np o u r l ' a x e Y
C o n s i g n e d e p o s i t i o np o u r l ' a x e Z
a x e X
a x e Y
a x e Z
Mécatronique 2 (MET2) – p. 25/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
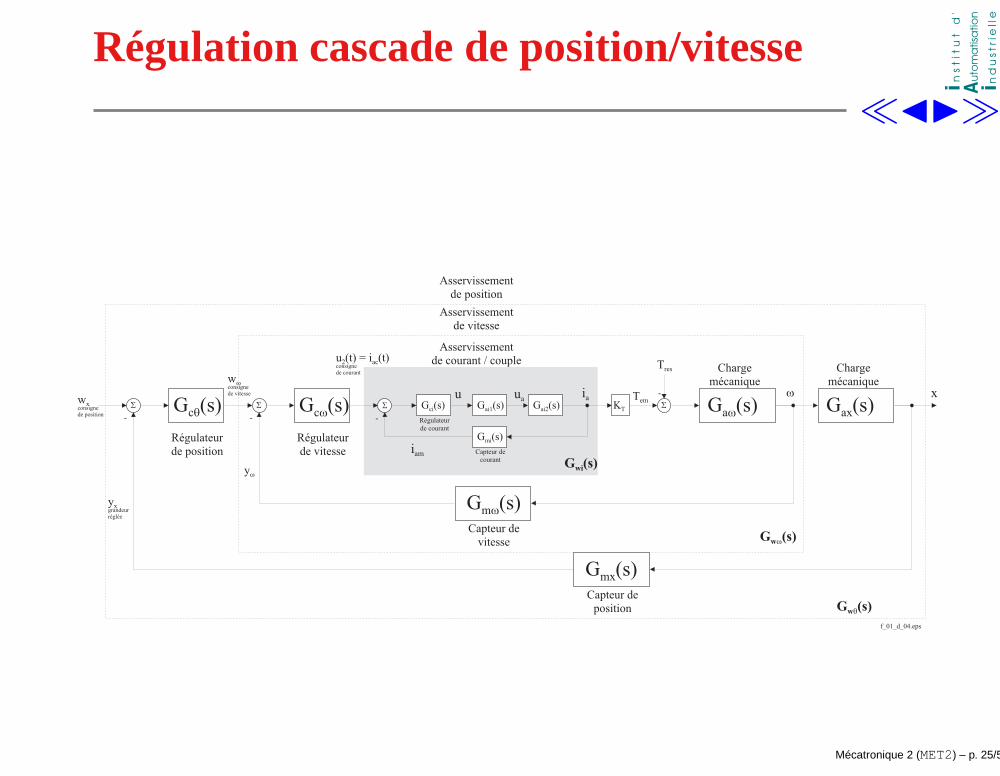
Régulation cascade de position/vitesse
S-
i a
i a m
u u a K TG a i 1 ( s )G c i ( s )
G m i ( s )
S
T r e s
w-T e m
u 2 ( t ) = i a c ( t )c o n s i g n ed e c o u r a n t
y w
A s s e r v i s s e m e n td e c o u r a n t / c o u p l e C h a r g e
m é c a n i q u e
C a p t e u r d ev i t e s s e
S-
w wc o n s i g n ed e v i t e s s e
G a i 2 ( s )
A s s e r v i s s e m e n td e v i t e s s e
R é g u l a t e u rd e v i t e s s e
G c w ( s )
G m w ( s )
G a w ( s )
G w i ( s )
R é g u l a t e u rd e c o u r a n t
C a p t e u r d ec o u r a n t
C h a r g em é c a n i q u eG a x ( s )
C a p t e u r d ep o s i t i o n
G m x ( s )
xS
-w xc o n s i g n ed e p o s i t i o n
R é g u l a t e u rd e p o s i t i o n
G c q ( s )
G w w ( s )
y xg r a n d e u rr é g l é e
A s s e r v i s s e m e n td e p o s i t i o n
f _ 0 1 _ d _ 0 4 . e p s
G w q ( s )
Mécatronique 2 (MET2) – p. 25/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Pyramide d’automatisation
N i v e a u d ' e x p l o i t a t i o n
N i v e a u d e c o n d u i t eN i v e a u s y s t è m e s( c e l l u l e )1 [ k b i t ] - 1 [ M B y t e s ] , 1 - 1 0 [ s ]
N i v e a u c o m m a n d e si n d u s t r i e l l e s1 0 - 5 0 0 [ B y t e s ] , 1 - 1 0 [ m s ]
N i v e a u c a p t e u r se t a c t i o n n e u r s1 - 8 [ B y t e s ] , 5 - 1 0 0 [ m s ]
O r d i n a t e u r d ' e x p l o i t a t i o n ,G P A O , C A O , F A O
O r d i n a t e u r p i l o t e s p é c i f i q u ea u x d o m a i n e s d ' a p p l i c a t i o n
O r d i n a t e u r d e c o n t r ô l e e td e c o m m a n d e d e m a c h i n e s
A u t o m a t e s ( A P I ) , c o o r d i n a t e u rd ' a x e s , s y s t è m e s d e m e s u r e
C a p t e u r s , a c t i o n n e u r s ,c o m m a n d e s d ' a x e s f _ 0 1 _ a _ 0 1 . e p s
Mécatronique 2 (MET2) – p. 26/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Mouvement bang bang
0 0.5 1 1.50
0.5
1
θ
Déplacement élémentaire de position angulaire de 1 [rad]
0 0.5 1 1.50
0.5
1
1.5
ω
0 0.5 1 1.5−4
−2
0
2
4
t [s]
α
f_demo_bb_1.eps Mécatronique 2 (MET2) – p. 27/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Mouvement bang bang
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.5
1
θ
Déplacement élémentaire de position angulaire de 1 [rad]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
ω
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8−4
−2
0
2
4
t [s]
α
f_demo_bb_2.eps Mécatronique 2 (MET2) – p. 28/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
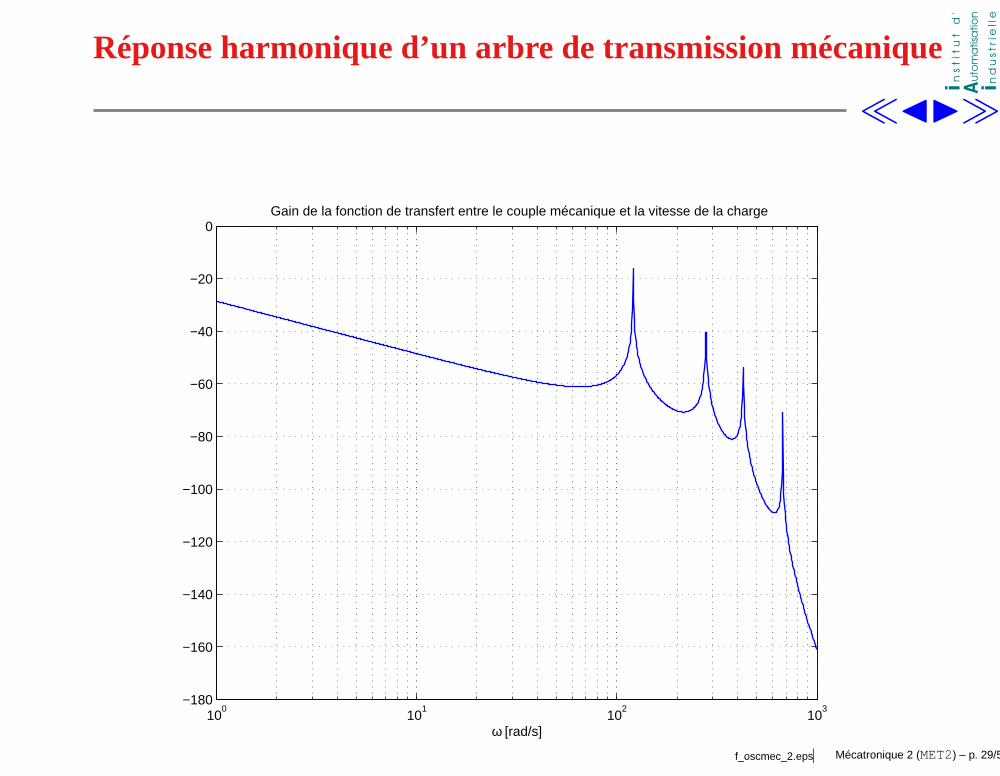
Réponse harmonique d’un arbre de transmission mécanique
100
101
102
103
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
ω [rad/s]
Gain de la fonction de transfert entre le couple mécanique et la vitesse de la charge
f_oscmec_2.eps Mécatronique 2 (MET2) – p. 29/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Réponse harmonique d’un arbre de transmission mécanique rigide
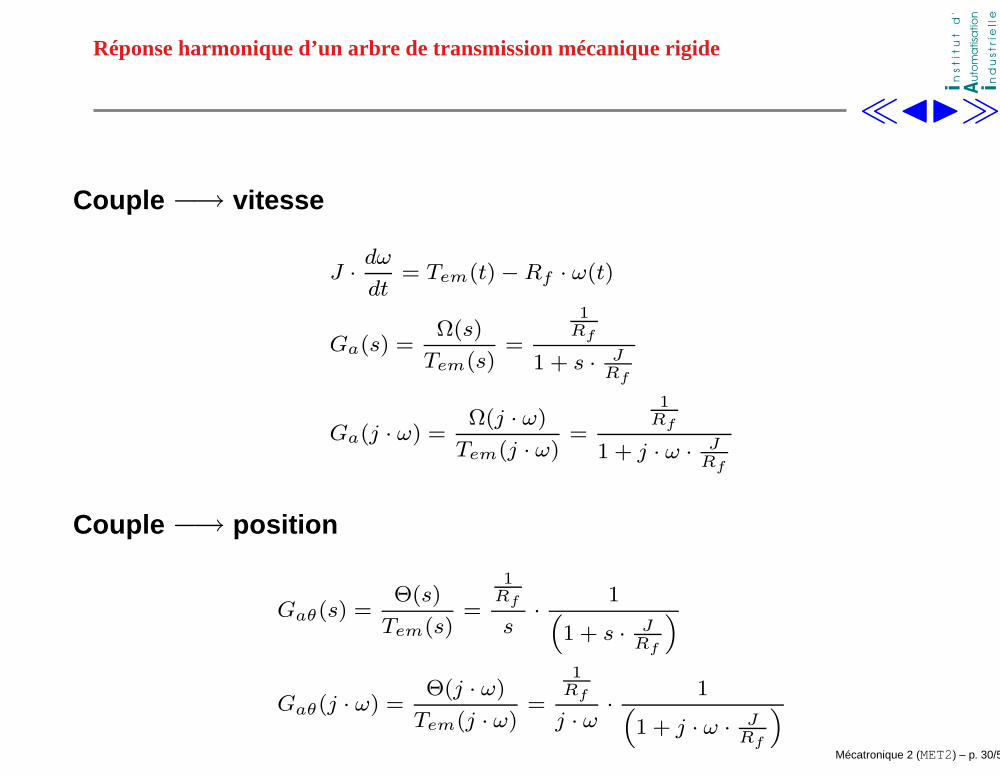
Couple −→ vitesse
J ·
dω
dt= Tem(t) − Rf · ω(t)
Ga(s) =Ω(s)
Tem(s)=
1
Rf
1 + s ·
JRf
Ga(j · ω) =Ω(j · ω)
Tem(j · ω)=
1
Rf
1 + j · ω ·
JRf
Couple −→ position
Gaθ(s) =Θ(s)
Tem(s)=
1
Rf
s·
1“
1 + s ·
JRf
”
Gaθ(j · ω) =Θ(j · ω)
Tem(j · ω)=
1
Rf
j · ω·
1“
1 + j · ω ·
JRf
”
Mécatronique 2 (MET2) – p. 30/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
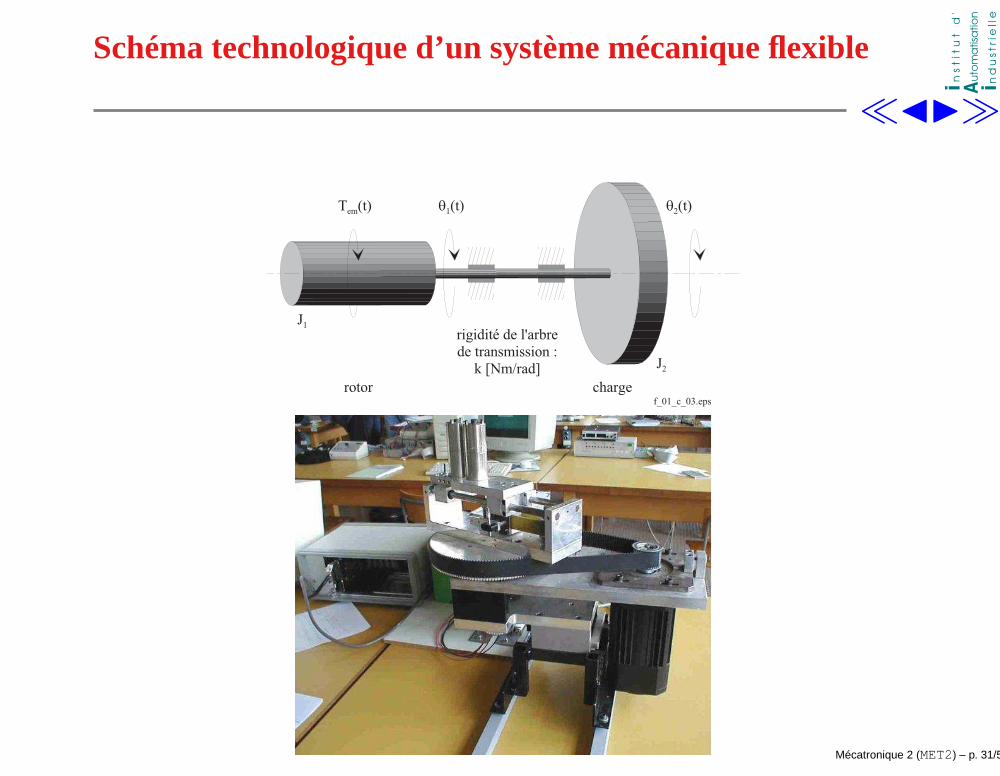
Schéma technologique d’un système mécanique flexible
q 1 ( t )T e m ( t ) q 2 ( t )
r o t o r c h a r g e
r i g i d i t é d e l ' a r b r ed e t r a n s m i s s i o n :
k [ N m / r a d ]f _ 0 1 _ c _ 0 3 . e p s
J 1
J 2
Mécatronique 2 (MET2) – p. 31/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
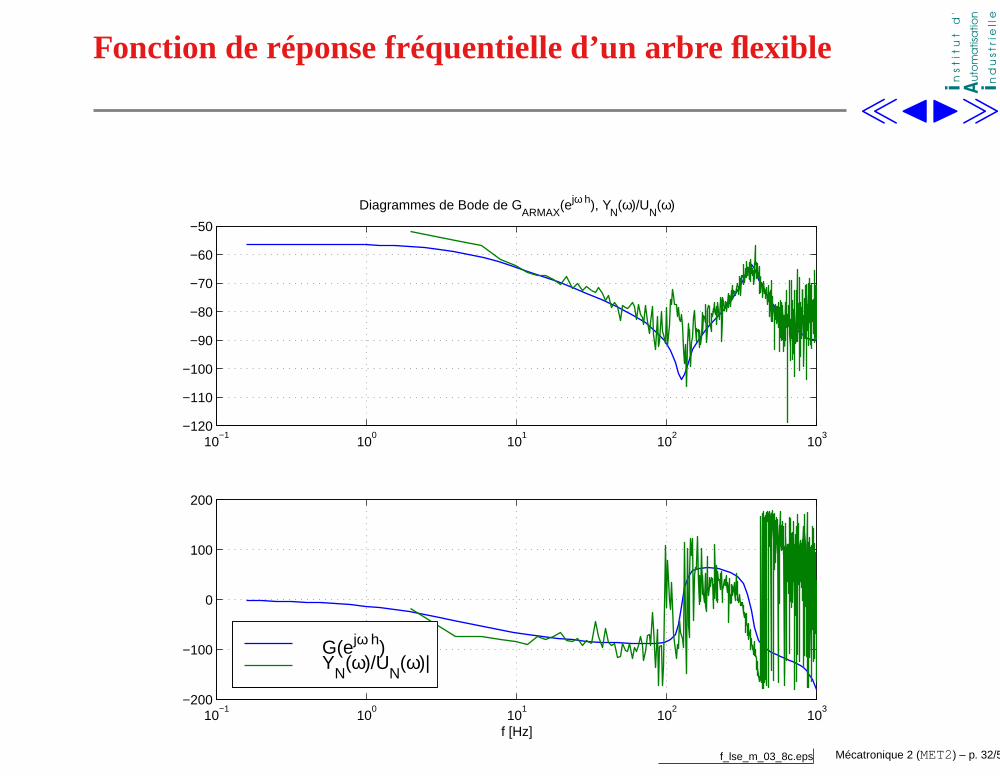
Fonction de réponse fréquentielle d’un arbre flexible
10−1
100
101
102
103
−120
−110
−100
−90
−80
−70
−60
−50
Diagrammes de Bode de GARMAX
(ejω h), YN
(ω)/UN
(ω)
10−1
100
101
102
103
−200
−100
0
100
200
f [Hz]
G(ejω h)Y
N(ω)/U
N(ω)|
f_lse_m_03_8c.eps Mécatronique 2 (MET2) – p. 32/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Caractéristiques de frottement
C o u p l e d ef r o t t e m e n t
V i t e s s e0
C o u p l e d ef r o t t e m e n t
V i t e s s e0
F r o t t e m e n t s e c p u r S t i c k s l i p f _ 0 1 _ a _ 0 3 . e p s
Mécatronique 2 (MET2) – p. 33/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Effet du frottement sec
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
wx, yx [rad]
wy,
yy
[rad
]
Cercles de consigne et de grandeur réglée
f_ex_04_3.eps
Mécatronique 2 (MET2) – p. 34/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Couples nécessaires à l’entraînement de diverses charges
C o u p l e
V i t e s s e
C o u p l e c o n s t a n t
C o u p l e c o n s t a n t
P u i s s a n c e c o n s t a n t e
C o u p l e p r o p o r t i o n n e la u c a r r é d e l a v i t e s s e
P o m p e e tv e n t i l a t e u r s
C o n v o y e u r s
T r a c t i o n e tb r o c h e s
f _ 0 1 _ a _ 0 2 . e p s0
Mécatronique 2 (MET2) – p. 35/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les 4 quadrants de fonctionnement
w
T e m
0
T e mw
T e m
w
T e m
w
T e m
w
12
3 4 f _ 0 1 _ a _ 0 3 . e p s
Mécatronique 2 (MET2) – p. 36/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Modélisation de la dynamique du couple
T e m c T e m [ N m ]G w T ( s )C o n s i g n ed e c o u p l e( c o u p l e s o u h a i t é )
C o u p l e e f f e c t i f( c o u p l e p r o d u i tp a r l ' e n t r a î n e m e n t )F o n c t i o n d e t r a n s f e r t
c o n n u ef _ 0 1 _ a _ 1 0 _ a . e p s
Mécatronique 2 (MET2) – p. 37/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Modélisation de la dynamique du couple
T e m c T e m [ N m ]G w T ( s )C o n s i g n ed e c o u p l e( c o u p l e s o u h a i t é )
C o u p l e e f f e c t i f( c o u p l e p r o d u i tp a r l ' e n t r a î n e m e n t )F o n c t i o n d e t r a n s f e r t
c o n n u ef _ 0 1 _ a _ 1 0 _ a . e p s
T e m c T e m [ N m ]K w Tf _ 0 1 _ a _ 1 0 _ b . e p s
Mécatronique 2 (MET2) – p. 37/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
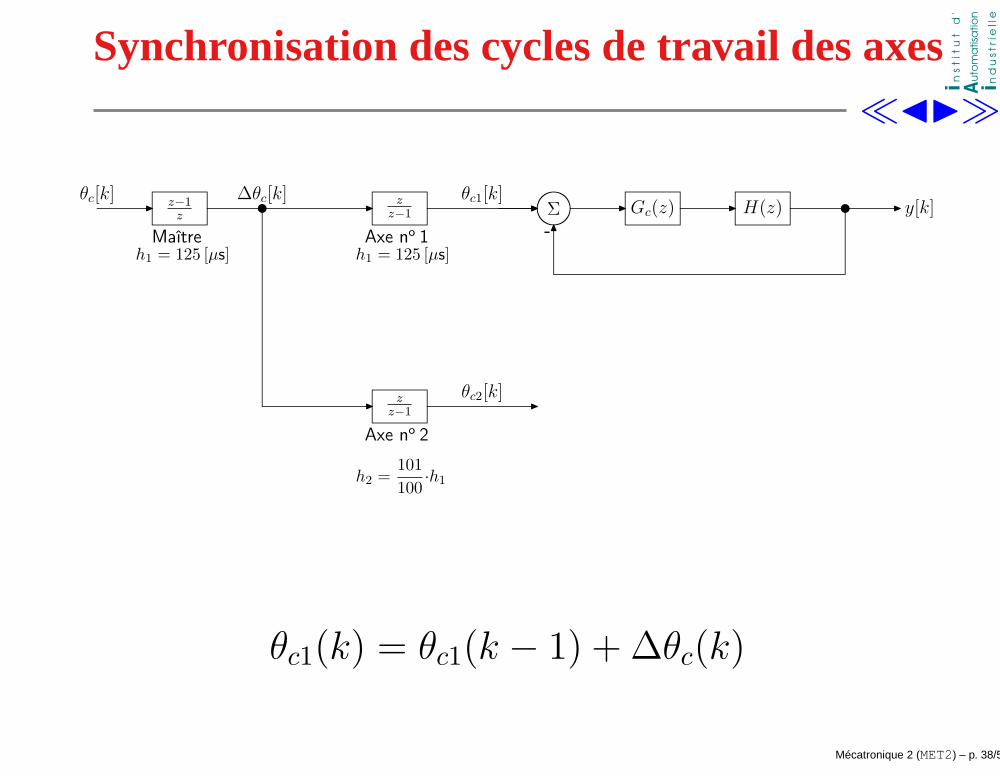
Synchronisation des cycles de travail des axes
z−1z
zz−1
zz−1
Σ-
Gc(z) H(z) y[k]-
∆θc[k]θc[k] θc1[k]
θc2[k]
Maître
h1 = 125 [µs]Axe n
o1
h1 = 125 [µs]
Axe no2
h2 =101
100·h1
Mécatronique 2 (MET2) – p. 38/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
z−1z
zz−1
zz−1
Σ-
Gc(z) H(z) y[k]-
∆θc[k]θc[k] θc1[k]
θc2[k]
Maître
h1 = 125 [µs]Axe n
o1
h1 = 125 [µs]
Axe no2
h2 =101
100·h1
θc1(k) = θc1(k − 1) + ∆θc(k)
Mécatronique 2 (MET2) – p. 38/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
z−1z
zz−1
zz−1
Σ-
Gc(z) H(z) y[k]-
∆θc[k]θc[k] θc1[k]
θc2[k]
Maître
h1 = 125 [µs]Axe n
o1
h1 = 125 [µs]
Axe no2
h2 =101
100·h1
θc1(k) = θc1(k − 1) + ∆θc(k)
θc2(k) = θc2(k − 1) + ∆θc(k)Mécatronique 2 (MET2) – p. 38/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
0 0.005 0.01 0.015 0.02 0.025 0.030
0.01
0.02
0.03
θ c, θc1
, θc2 θ
cθ
c1θ
c2
0 0.005 0.01 0.015 0.02 0.025 0.030
1
2
x 10−4
θ c−θ c1
,θc−
θ c2
0 0.125 0.25 0.375 0.5 0.625 0.75 0.875 1 1.125 1.25 1.375 1.5
x 10−3
0
1
2x 10
−3
θ c, θc1
, θc2 θ
cθ
c1θ
c2
0 0.125 0.25 0.375 0.5 0.625 0.75 0.875 1 1.125 1.25 1.375 1.5
x 10−3
0
1
2
3x 10
−4
θ c−θ c1
,θc−
θ c2
t [s]
f_synchro_07_ini_4.eps
Mécatronique 2 (MET2) – p. 38/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
0 0.005 0.01 0.015 0.02 0.025 0.030
0.01
0.02
0.03
θ c, θc1
, θc2 θ
cθ
c1θ
c2
0 0.005 0.01 0.015 0.02 0.025 0.030
1
2
x 10−4
θ c−θ c1
,θc−
θ c2 θc−θ
c1θ
c−θ
c2
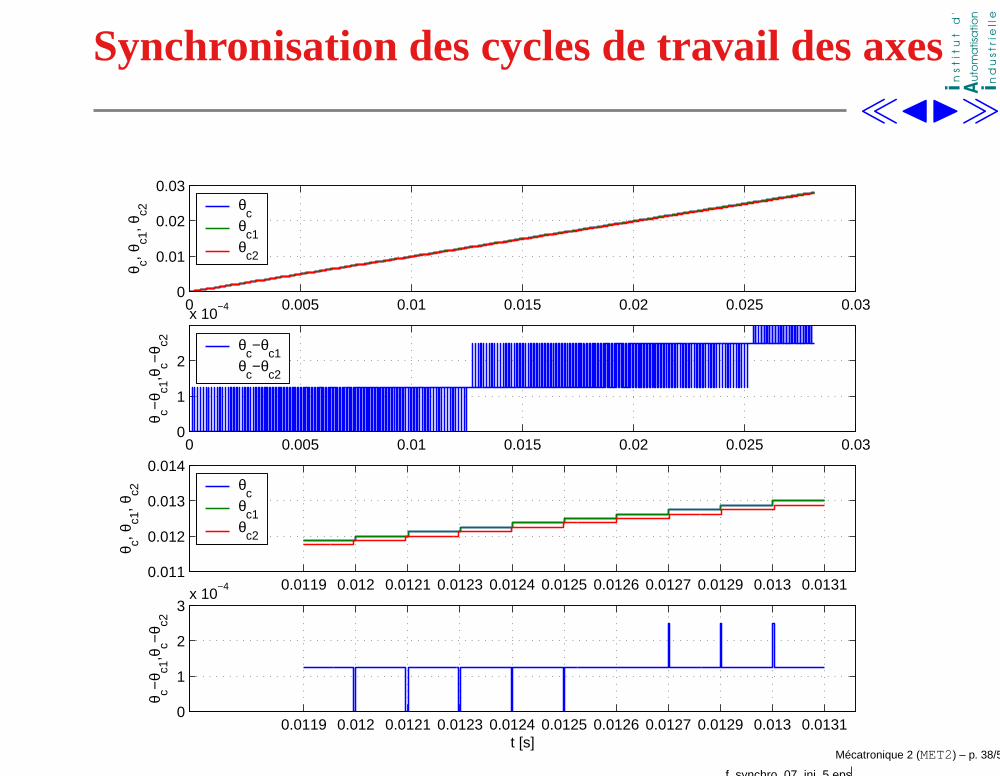
0.0119 0.012 0.0121 0.0123 0.0124 0.0125 0.0126 0.0127 0.0129 0.013 0.01310.011
0.012
0.013
0.014
θ c, θc1
, θc2 θ
cθ
c1θ
c2
0.0119 0.012 0.0121 0.0123 0.0124 0.0125 0.0126 0.0127 0.0129 0.013 0.01310
1
2
3x 10
−4
θ c−θ c1
,θc−
θ c2
t [s]
f_synchro_07_ini_5.eps
Mécatronique 2 (MET2) – p. 38/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
1 1
1
Σ-
Σ
+
+ Kp
(1 − z−1) · Td
h
Régulateur PD
H(z)
Σ-
Σ
+
+ Kp
(1 − z−1) · Td
h
Régulateur PD
H(z)
θc[k]θc[k] θc1[k]
θc2[k]
Maître
h1 = 125 [µs]Axe n
o1
h1 = 125 [µs]
Axe no2
h2 =101
100·h1
Mécatronique 2 (MET2) – p. 38/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
0 0.005 0.01 0.015 0.02 0.025 0.030
0.01
0.02
0.03
θ c1, θ
m1, θ
c2, θ
m2
0 0.005 0.01 0.015 0.02 0.025 0.030
0.5
1
1.5x 10
−4
θ c1−
θ c2
0 0.005 0.01 0.015 0.02 0.025 0.030
2
x 10−4
θ m1−
θ m2
0 0.005 0.01 0.015 0.02 0.025 0.03−0.2
0
0.2
ω1−
ω2
t [s]
f_synchro_06_ini_6.eps
Mécatronique 2 (MET2) – p. 38/55
J
I
A
i
iutomatisation
n s t i t u t d '
n d u s t r i e l l e
Synchronisation
descycles
detravaildes
axes
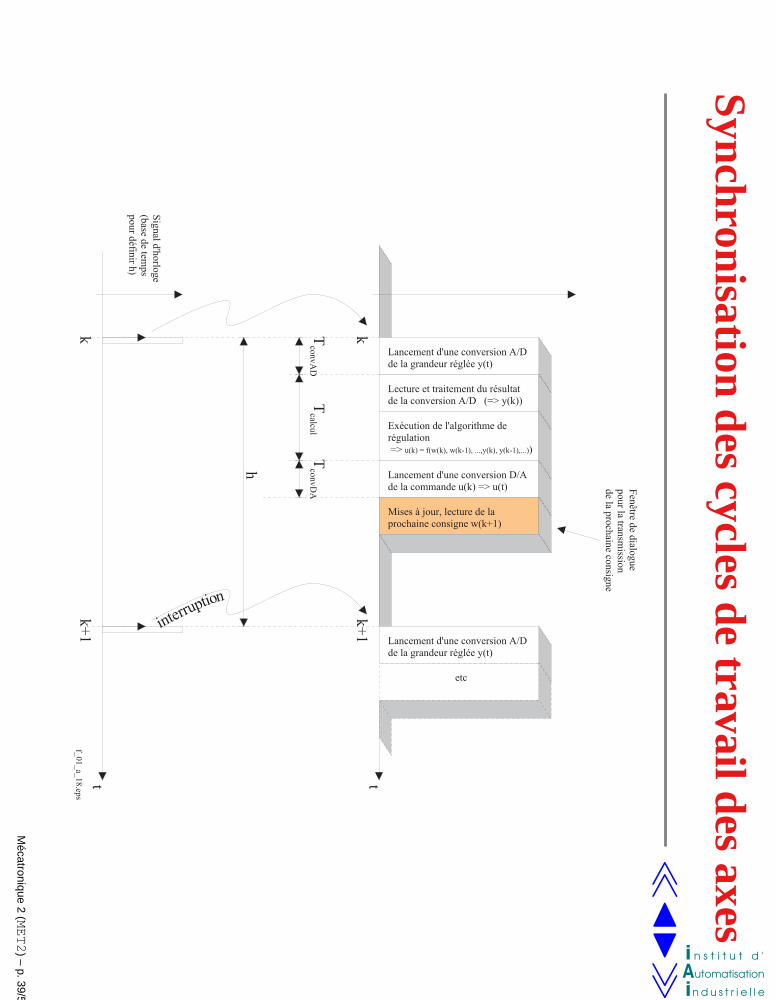
L e c t u r e e t t r a i t e m e n t d u r é s u l t a td e l a c o n v e r s i o n A / D ( = > y ( k ) )
E x é c u t i o n d e l ' a l g o r i t h m e d er é g u l a t i o n = > u ( k ) = f ( w ( k ) , w ( k - 1 ) , . . . , y ( k ) , y ( k - 1 ) , . . . ) )
L a n c e m e n t d ' u n e c o n v e r s i o n D / Ad e l a c o m m a n d e u ( k ) = > u ( t )
M i s e s à j o u r , l e c t u r e d e l ap r o c h a i n e c o n s i g n e w ( k + 1 )
kk+1
h
TconvAD
TconvDA
Tcalcul
L a n c e m e n t d ' u n e c o n v e r s i o n A / Dd e l a g r a n d e u r r é g l é e y ( t )
L a n c e m e n t d ' u n e c o n v e r s i o n A / Dd e l a g r a n d e u r r é g l é e y ( t )
t
kk+1
t
Fenêtre de dialoguepour la transmissionde la prochaine consigne
e t c
i n t e r ru p t i o n
Signal d'horloge(base de tempspour définir h)
f_01_a_18.eps
Mécatronique
2(MET2
)–
p.39/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
1 1θc[k]θc[k] θc1[k]
Maître
h1 = 125 [µs]Axe n
o1
h1 = 125 [µs]
jitter=25 [µs]
Σ-
Σ
+
+ Kp
(1 − z−1) · Td
h
Régulateur PD
H(z)
Mécatronique 2 (MET2) – p. 39/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
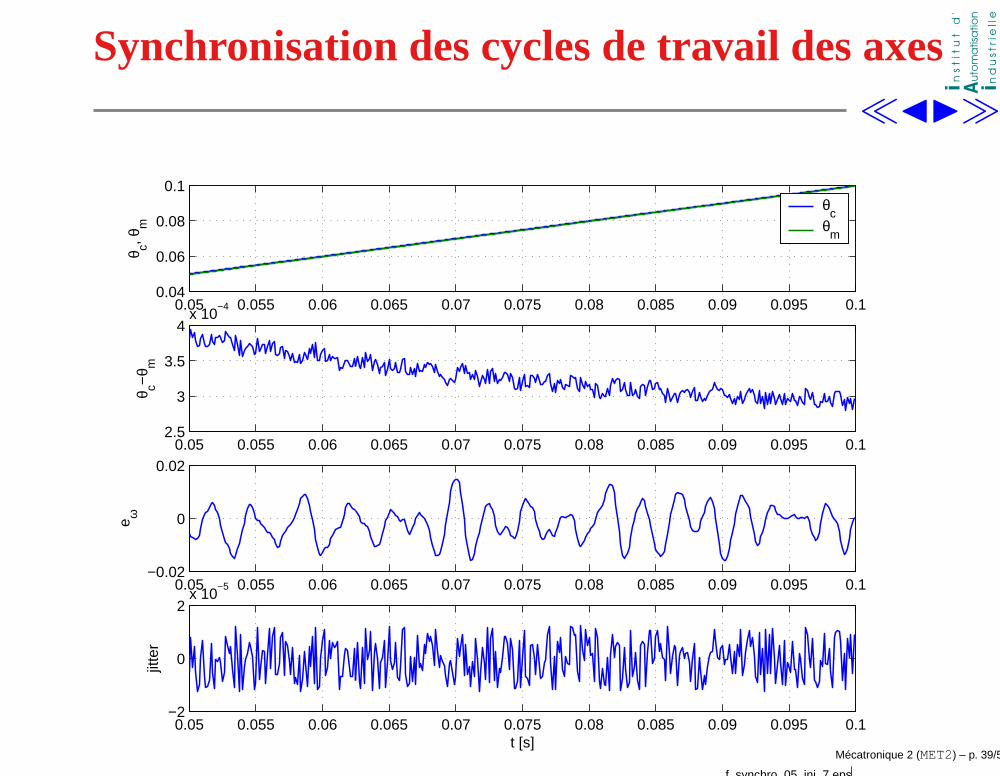
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10.04
0.06
0.08
0.1
θ c, θm
θc
θm
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.12.5
3
3.5
4x 10
−4
θ c−θ m
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1−0.02
0
0.02
e ω
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1−2
0
2x 10
−5
jitte
r
t [s]
f_synchro_05_ini_7.eps
Mécatronique 2 (MET2) – p. 39/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Synchronisation des cycles de travail des axes
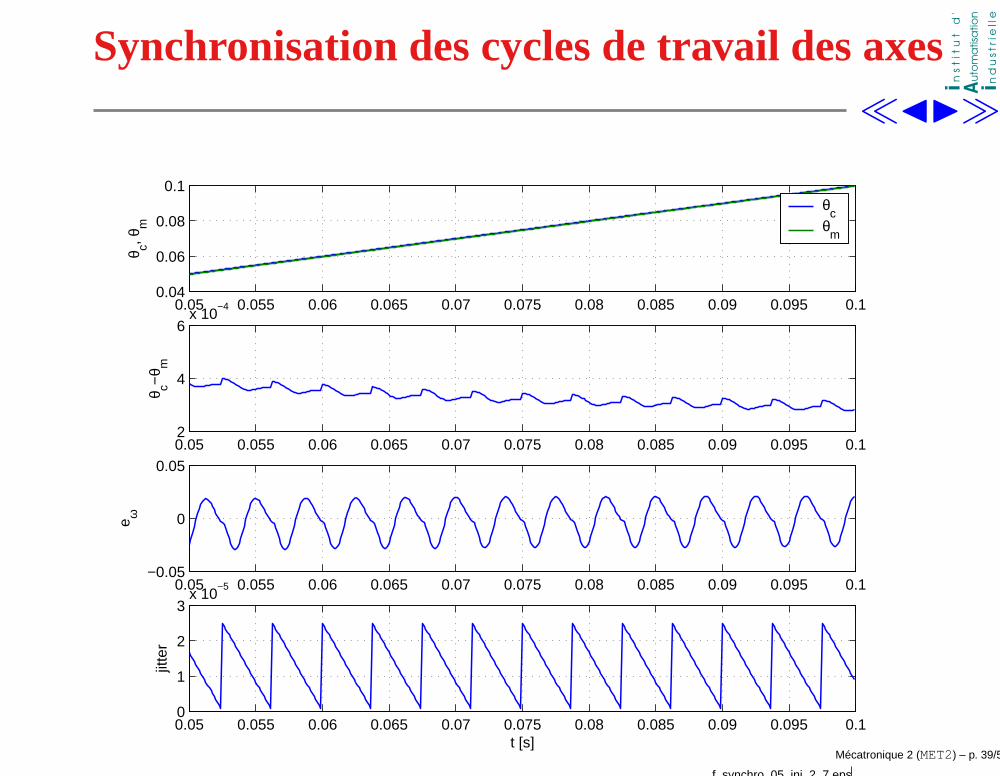
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10.04
0.06
0.08
0.1
θ c, θm
θc
θm
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.12
4
6x 10
−4
θ c−θ m
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1−0.05
0
0.05
e ω
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
1
2
3x 10
−5
jitte
r
t [s]
f_synchro_05_ini_2_7.eps
Mécatronique 2 (MET2) – p. 39/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Technologies d’entraînement
entraînements hydrauliquesentraînements pneumatiquesentraînements électriques
Mécatronique 2 (MET2) – p. 40/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Technologies d’entraînement
entraînements hydrauliquesentraînements pneumatiquesentraînements électriques
Entraînements électriques :à courant continu ("DC" à collecteur àexcitation séparée)synchrones auto-commutés ("AC" et "DC" àaimants permanents)asynchrones ("AC", à cage)
Mécatronique 2 (MET2) – p. 40/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
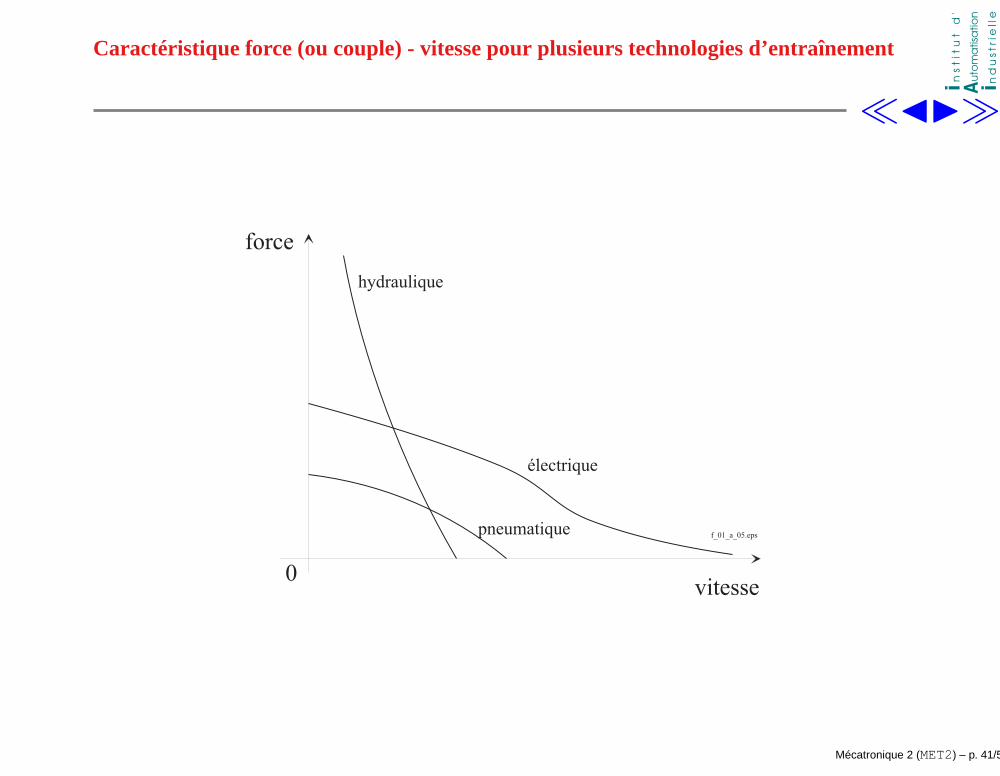
Caractéristique force (ou couple) - vitesse pour plusieurstechnologies d’entraînement
f o r c e
v i t e s s e
h y d r a u l i q u e
p n e u m a t i q u e
é l e c t r i q u e
f _ 0 1 _ a _ 0 5 . e p s
0
Mécatronique 2 (MET2) – p. 41/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Caractéristique force (ou couple) - vitesse pour plusieurstechnologies d’entraînement
systèmes hydrauliques
whydraulique = p ≈ 400 [bar] = 4 · 107
[
Jm3
]
Mécatronique 2 (MET2) – p. 42/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Caractéristique force (ou couple) - vitesse pour plusieurstechnologies d’entraînement
systèmes hydrauliques
whydraulique = p ≈ 400 [bar] = 4 · 107
[
Jm3
]
systèmes électromagnétiques :
wmagnétique =1
2· B · H =
1
2·B2
µ0
=1
2·
1 [T]2
0.4 · π · 10−6[
V·sA·m
] ≈ 4 · 105
[
Jm3
]
Mécatronique 2 (MET2) – p. 42/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
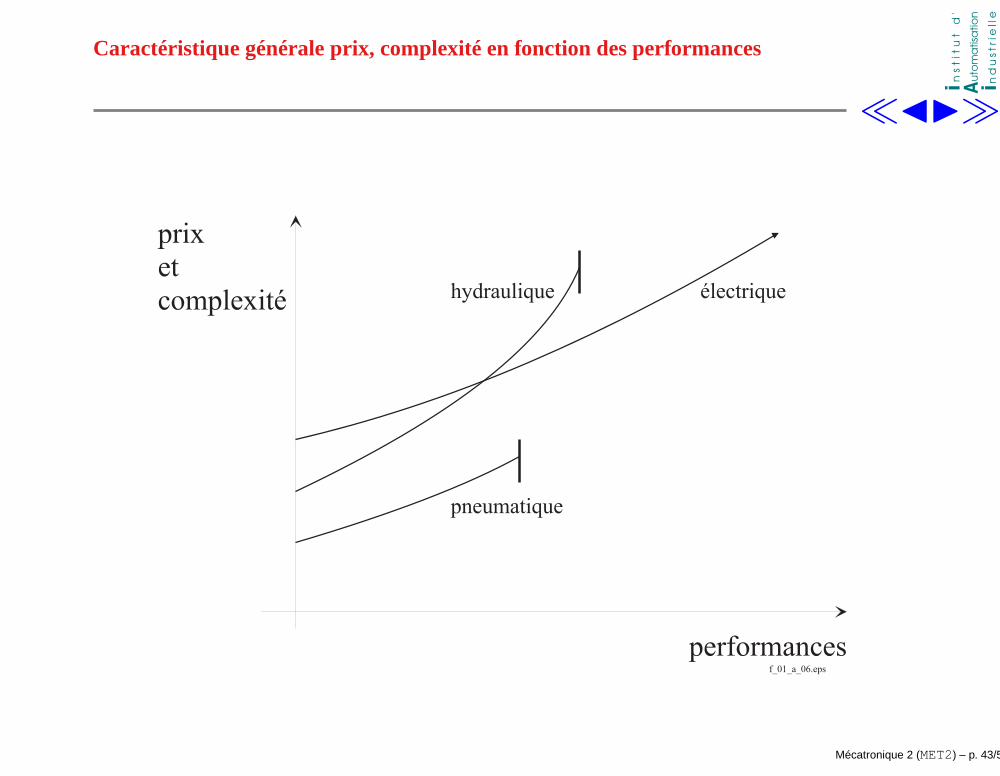
Caractéristique générale prix, complexité en fonction desperformances
p r i xe tc o m p l e x i t é
p e r f o r m a n c e s
h y d r a u l i q u e
p n e u m a t i q u e
é l e c t r i q u e
f _ 0 1 _ a _ 0 6 . e p s
Mécatronique 2 (MET2) – p. 43/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
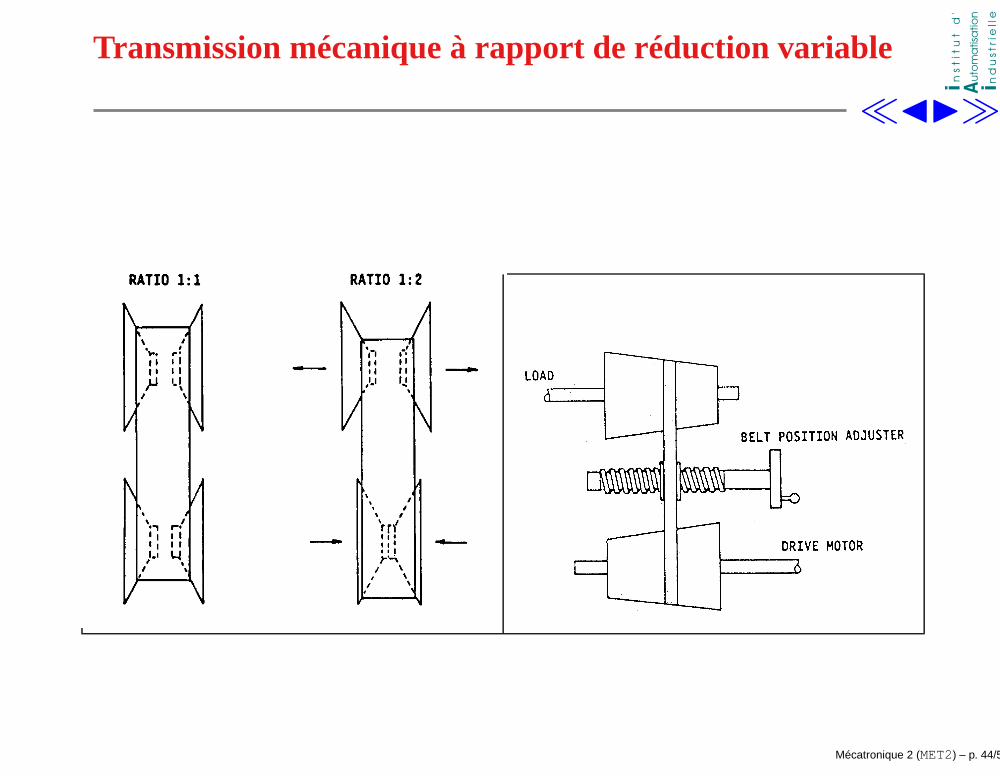
Transmission mécanique à rapport de réduction variable
Mécatronique 2 (MET2) – p. 44/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Les différents composants d’un entraînement électrique réglé
M
TRANSFO
RMATEU
R
RED
RESSEU
R
FILTRE
R E S E A U A C
ONDULEU
R OU VARIA
TEUR
DE C
OURANT C
ONTIN
U
CAPTEU
R DE C
OURANT
MOTEU
R
CAPTEU
R DE PO
SITION
E
6 o u 4
C O M M A N D ED ' A X EC O O R D I N A T E U R
D ' A X E S
o u D C
o u 1
A u x a u t r e s c o m m a n d e s d ' a x e s
CHARGE M
ECANIQ
UE
CAPTEU
R DE PO
SITION
EN BOUT D
'ARBRE
TRANSM
ISSION M
ECANIQ
UE
E
A U T O M A T EP R O G R A M M A B L E
B U S D ET E R R A I N
f _ 0 1 _ a _ 0 7 . e p s
Mécatronique 2 (MET2) – p. 45/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Transmission
But :vitessecouplemouvementrésolution
Mécatronique 2 (MET2) – p. 46/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Transmission
But :vitessecouplemouvementrésolution
Réalisation :réducteurvis sans fin, vis à billescourroie et pouliecame
Mécatronique 2 (MET2) – p. 46/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
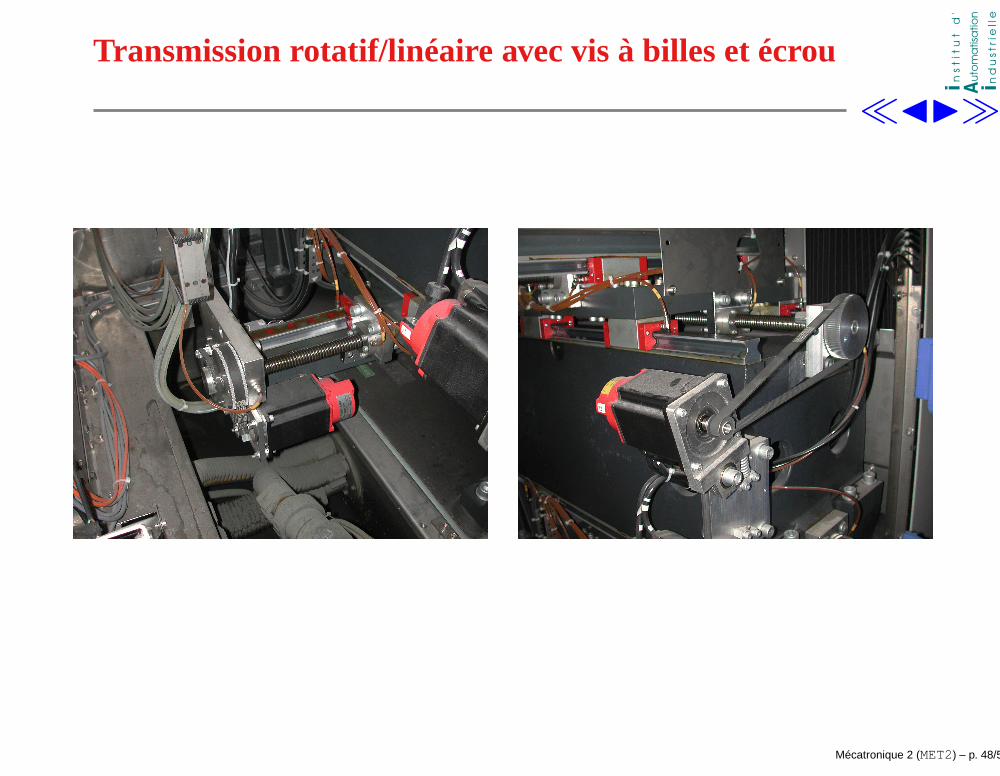
Transmission rotatif/linéaire avec vis à billes et écrou
é c r o u v i s
x
f _ 0 1 _ c _ 0 1 . e p s
Mécatronique 2 (MET2) – p. 47/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Transmission rotatif/linéaire avec vis à billes et écrou
Mécatronique 2 (MET2) – p. 48/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la mécanique (principe de construction, transmissions,simulation par éléments finis, constructions rigides etlinéaires, cinématique, thermique)
Mécatronique 2 (MET2) – p. 49/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la mécanique (principe de construction, transmissions,simulation par éléments finis, constructions rigides etlinéaires, cinématique, thermique)
la régulation automatique (régulateurs auto-adaptatifs,robustes, par mode de glissement, procédésd’auto-tuning et d’identification, algorithmesparticuliers de poursuite de consigne)
Mécatronique 2 (MET2) – p. 49/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la mécanique (principe de construction, transmissions,simulation par éléments finis, constructions rigides etlinéaires, cinématique, thermique)
la régulation automatique (régulateurs auto-adaptatifs,robustes, par mode de glissement, procédésd’auto-tuning et d’identification, algorithmesparticuliers de poursuite de consigne)
les machines électriques et leur mode de commande(courant continu, synchrone y.c. pas-à-pas et réluctant,asynchrone à commande vectorielle, technologie desaimants permanents)
Mécatronique 2 (MET2) – p. 49/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
l’électronique de puissance et l’électroniqueindustrielle (variateurs de courant, convertisseurs defréquence, convertisseurs résonants, circuits decommande, filtrage actif)
Mécatronique 2 (MET2) – p. 50/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
l’électronique de puissance et l’électroniqueindustrielle (variateurs de courant, convertisseurs defréquence, convertisseurs résonants, circuits decommande, filtrage actif)
l’informatique industrielle (systèmes temps réel,multitraitement, interfaces graphiques, compilateurs)
Mécatronique 2 (MET2) – p. 50/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
l’électronique de puissance et l’électroniqueindustrielle (variateurs de courant, convertisseurs defréquence, convertisseurs résonants, circuits decommande, filtrage actif)
l’informatique industrielle (systèmes temps réel,multitraitement, interfaces graphiques, compilateurs)
les systèmes de mesures (capteurs de position de typecodeur incrémental ou resolver, systèmes demultiplication de résolution, conversion A/D et D/A)
Mécatronique 2 (MET2) – p. 50/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la téléinformatique (bus de terrain : CAN, Interbus,SERCOS, FIP, Profibus, ASI, etc)
Mécatronique 2 (MET2) – p. 51/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la téléinformatique (bus de terrain : CAN, Interbus,SERCOS, FIP, Profibus, ASI, etc)
l’électronique numérique et analogique (processeursde signaux "DSP", microcontrôleurs, ASICs, FPGAs,conditionnement du signal, compatibilitéélectromagnétique)
Mécatronique 2 (MET2) – p. 51/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
la téléinformatique (bus de terrain : CAN, Interbus,SERCOS, FIP, Profibus, ASI, etc)
l’électronique numérique et analogique (processeursde signaux "DSP", microcontrôleurs, ASICs, FPGAs,conditionnement du signal, compatibilitéélectromagnétique)
la microélectronique (cicuits spécialisés pour lacommande de moteurs et le traitements des capteurs)
Mécatronique 2 (MET2) – p. 51/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
les installations électriques (sécurité, armoires decommande)
Mécatronique 2 (MET2) – p. 52/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Système d’entraînement réglé
les installations électriques (sécurité, armoires decommande)
le traitement de signal (filtrage analogique etnumérique, analyse harmonique)
Mécatronique 2 (MET2) – p. 52/55

JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Technologies d’entraînement électrique
http ://www.bolton.ac.uk/technology/mind/paderborn/motors/
Mécatronique 2 (MET2) – p. 53/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
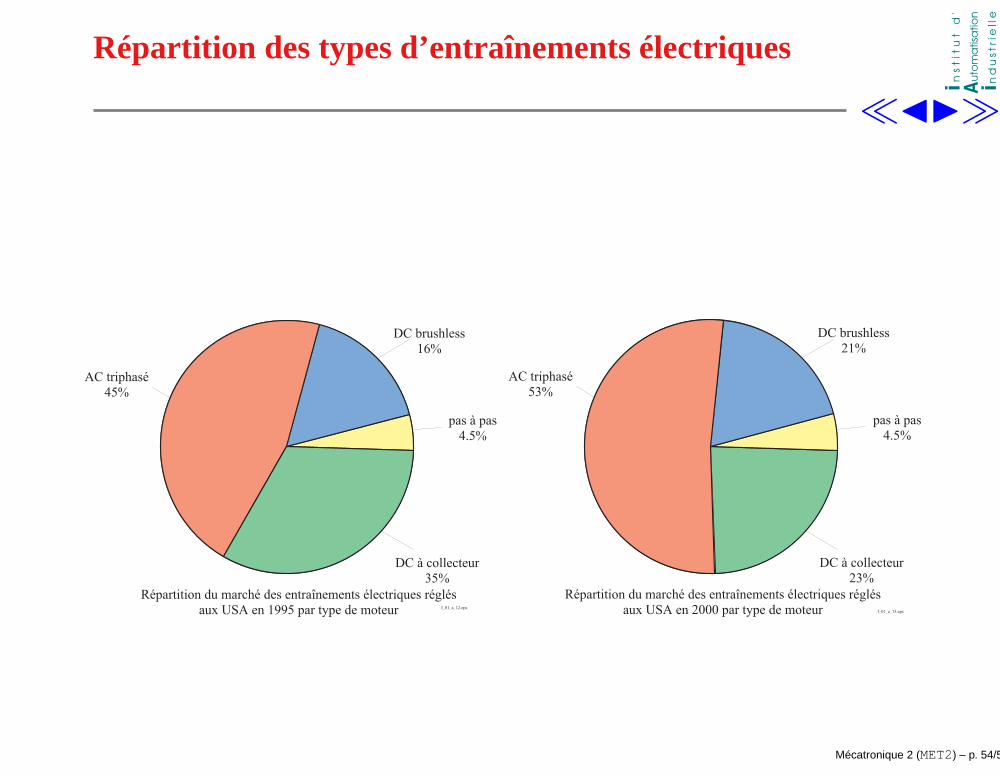
Répartition des types d’entraînements électriques
A C t r i p h a s é4 5 %
D C b r u s h l e s s1 6 %
p a s à p a s4 . 5 %
D C à c o l l e c t e u r3 5 %
R é p a r t i t i o n d u m a r c h é d e s e n t r a î n e m e n t s é l e c t r i q u e s r é g l é sa u x U S A e n 1 9 9 5 p a r t y p e d e m o t e u r f _ 0 1 _ a _ 1 2 . e p s
A C t r i p h a s é5 3 %
D C b r u s h l e s s2 1 %
p a s à p a s4 . 5 %
D C à c o l l e c t e u r2 3 %
R é p a r t i t i o n d u m a r c h é d e s e n t r a î n e m e n t s é l e c t r i q u e s r é g l é sa u x U S A e n 2 0 0 0 p a r t y p e d e m o t e u r f _ 0 1 _ a _ 1 3 . e p s
Mécatronique 2 (MET2) – p. 54/55
JI
Ai iu
tom
atisa
tio
n
ns
tit
ut
d
'
nd
us
trie
lle
Entraînement intégré
Mécatronique 2 (MET2) – p. 55/55
Related Documents





![Entraînements réglés - poseidon.heig-vd.chphp.iai.heig-vd.ch/~mee//cours/cours_er/chap_01/latex/chap_01.pdf · 4.4 Commande vectorielle de la machine asynchrone([17], 7.6, [13],](https://static.cupdf.com/doc/110x72/5b974c5f09d3f2d0248cb63e/entrainements-regles-meecourscourserchap01latexchap01pdf-44.jpg)



![chapitre… · Chapitre 2 Chapitre 4 Chapitre 5 Chapitre 7 Chapitre 6 Chapitre 8 Objet3 - titre : String - sousTitre [0..1] : String g - is bn : Stri ng [+ getDetails() : String Objet1](https://static.cupdf.com/doc/110x72/5ecf4e2192268a31f93db0c4/chapitre-chapitre-2-chapitre-4-chapitre-5-chapitre-7-chapitre-6-chapitre-8-objet3.jpg)

